EQUAZIONI DI MAXWELL - Elettrotecnica · 1 EQUAZIONI DI MAXWELL La forza di Lorentz esprime la...
57
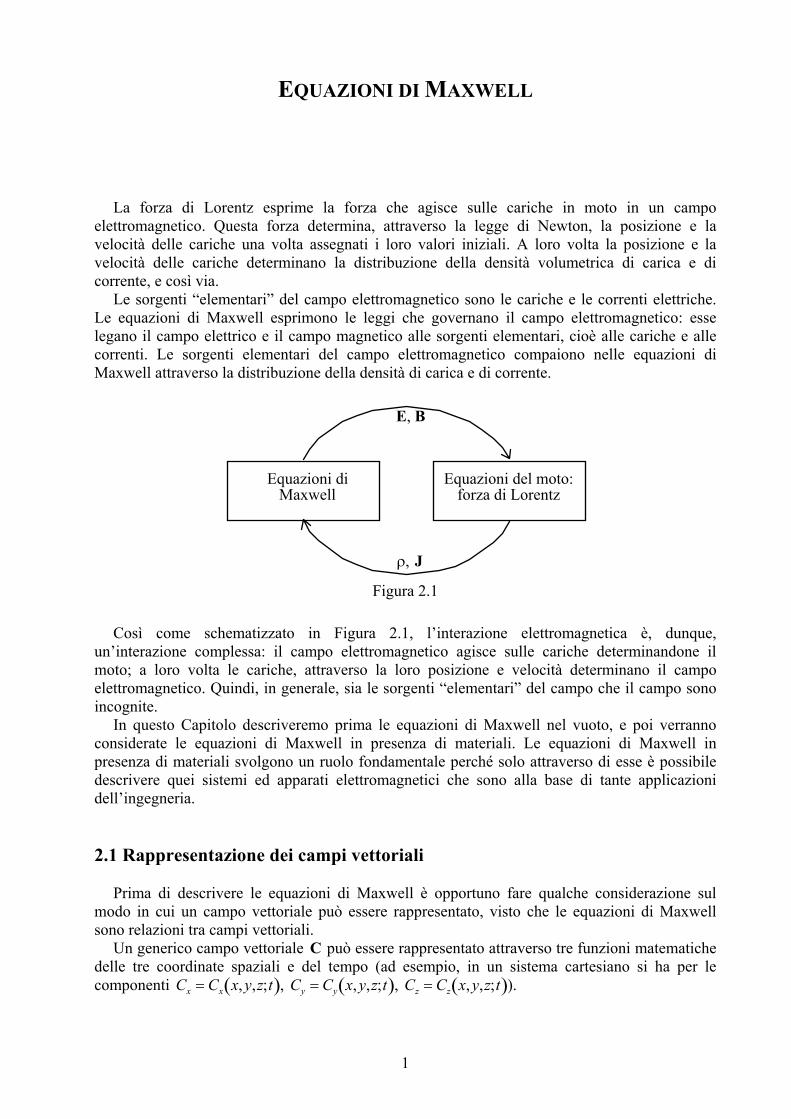
1 EQUAZIONI DI MAXWELL La forza di Lorentz esprime la forza che agisce sulle cariche in moto in un campo elettromagnetico. Questa forza determina, attraverso la legge di Newton, la posizione e la velocità delle cariche una volta assegnati i loro valori iniziali. A loro volta la posizione e la velocità delle cariche determinano la distribuzione della densità volumetrica di carica e di corrente, e così via. Le sorgenti “elementari” del campo elettromagnetico sono le cariche e le correnti elettriche. Le equazioni di Maxwell esprimono le leggi che governano il campo elettromagnetico: esse legano il campo elettrico e il campo magnetico alle sorgenti elementari, cioè alle cariche e alle correnti. Le sorgenti elementari del campo elettromagnetico compaiono nelle equazioni di Maxwell attraverso la distribuzione della densità di carica e di corrente. Equazioni di Maxwell Equazioni del moto: forza di Lorentz E, B ρ , J Figura 2.1 Così come schematizzato in Figura 2.1, l’interazione elettromagnetica è, dunque, un’interazione complessa: il campo elettromagnetico agisce sulle cariche determinandone il moto; a loro volta le cariche, attraverso la loro posizione e velocità determinano il campo elettromagnetico. Quindi, in generale, sia le sorgenti “elementari” del campo che il campo sono incognite. In questo Capitolo descriveremo prima le equazioni di Maxwell nel vuoto, e poi verranno considerate le equazioni di Maxwell in presenza di materiali. Le equazioni di Maxwell in presenza di materiali svolgono un ruolo fondamentale perché solo attraverso di esse è possibile descrivere quei sistemi ed apparati elettromagnetici che sono alla base di tante applicazioni dell’ingegneria. 2.1 Rappresentazione dei campi vettoriali Prima di descrivere le equazioni di Maxwell è opportuno fare qualche considerazione sul modo in cui un campo vettoriale può essere rappresentato, visto che le equazioni di Maxwell sono relazioni tra campi vettoriali. Un generico campo vettoriale C può essere rappresentato attraverso tre funzioni matematiche delle tre coordinate spaziali e del tempo (ad esempio, in un sistema cartesiano si ha per le componenti C x = C x x, y, z; t ( ), C y = C y x, y, z; t ( ), C z = C z x, y, z; t ( )).
Transcript of EQUAZIONI DI MAXWELL - Elettrotecnica · 1 EQUAZIONI DI MAXWELL La forza di Lorentz esprime la...
1
EQUAZIONI DI MAXWELL
La forza di Lorentz esprime la forza che agisce sulle cariche in moto in un campo elettromagnetico. Questa forza determina, attraverso la legge di Newton, la posizione e la velocità delle cariche una volta assegnati i loro valori iniziali. A loro volta la posizione e la velocità delle cariche determinano la distribuzione della densità volumetrica di carica e di corrente, e così via.
Le sorgenti “elementari” del campo elettromagnetico sono le cariche e le correnti elettriche. Le equazioni di Maxwell esprimono le leggi che governano il campo elettromagnetico: esse legano il campo elettrico e il campo magnetico alle sorgenti elementari, cioè alle cariche e alle correnti. Le sorgenti elementari del campo elettromagnetico compaiono nelle equazioni di Maxwell attraverso la distribuzione della densità di carica e di corrente.
Equazioni diMaxwell
Equazioni del moto:forza di Lorentz
E, B
ρ, J Figura 2.1
Così come schematizzato in Figura 2.1, l’interazione elettromagnetica è, dunque,
un’interazione complessa: il campo elettromagnetico agisce sulle cariche determinandone il moto; a loro volta le cariche, attraverso la loro posizione e velocità determinano il campo elettromagnetico. Quindi, in generale, sia le sorgenti “elementari” del campo che il campo sono incognite.
In questo Capitolo descriveremo prima le equazioni di Maxwell nel vuoto, e poi verranno considerate le equazioni di Maxwell in presenza di materiali. Le equazioni di Maxwell in presenza di materiali svolgono un ruolo fondamentale perché solo attraverso di esse è possibile descrivere quei sistemi ed apparati elettromagnetici che sono alla base di tante applicazioni dell’ingegneria. 2.1 Rappresentazione dei campi vettoriali
Prima di descrivere le equazioni di Maxwell è opportuno fare qualche considerazione sul modo in cui un campo vettoriale può essere rappresentato, visto che le equazioni di Maxwell sono relazioni tra campi vettoriali.
Un generico campo vettoriale C può essere rappresentato attraverso tre funzioni matematiche delle tre coordinate spaziali e del tempo (ad esempio, in un sistema cartesiano si ha per le componenti Cx = Cx x,y,z;t( ), Cy = Cy x, y,z;t( ), Cz = Cz x,y,z;t( )).
2
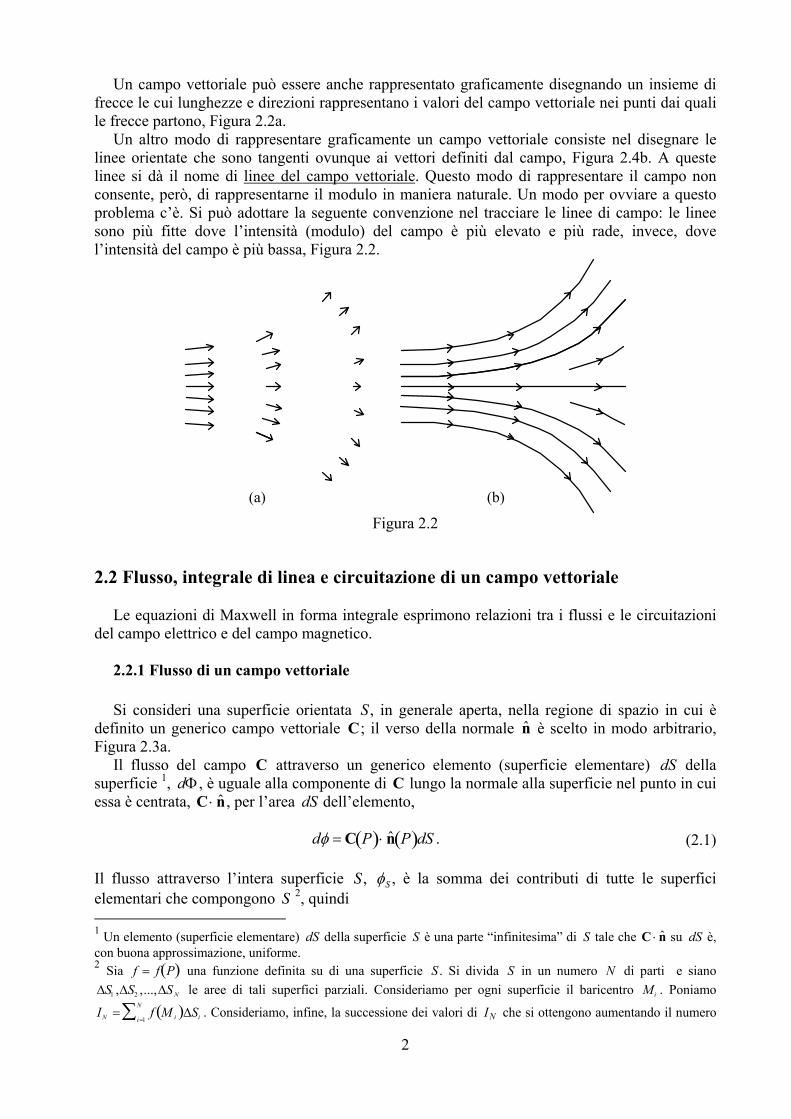
Un campo vettoriale può essere anche rappresentato graficamente disegnando un insieme di frecce le cui lunghezze e direzioni rappresentano i valori del campo vettoriale nei punti dai quali le frecce partono, Figura 2.2a.
Un altro modo di rappresentare graficamente un campo vettoriale consiste nel disegnare le linee orientate che sono tangenti ovunque ai vettori definiti dal campo, Figura 2.4b. A queste linee si dà il nome di linee del campo vettoriale. Questo modo di rappresentare il campo non consente, però, di rappresentarne il modulo in maniera naturale. Un modo per ovviare a questo problema c’è. Si può adottare la seguente convenzione nel tracciare le linee di campo: le linee sono più fitte dove l’intensità (modulo) del campo è più elevato e più rade, invece, dove l’intensità del campo è più bassa, Figura 2.2.
(a) (b) Figura 2.2
2.2 Flusso, integrale di linea e circuitazione di un campo vettoriale
Le equazioni di Maxwell in forma integrale esprimono relazioni tra i flussi e le circuitazioni del campo elettrico e del campo magnetico.
2.2.1 Flusso di un campo vettoriale
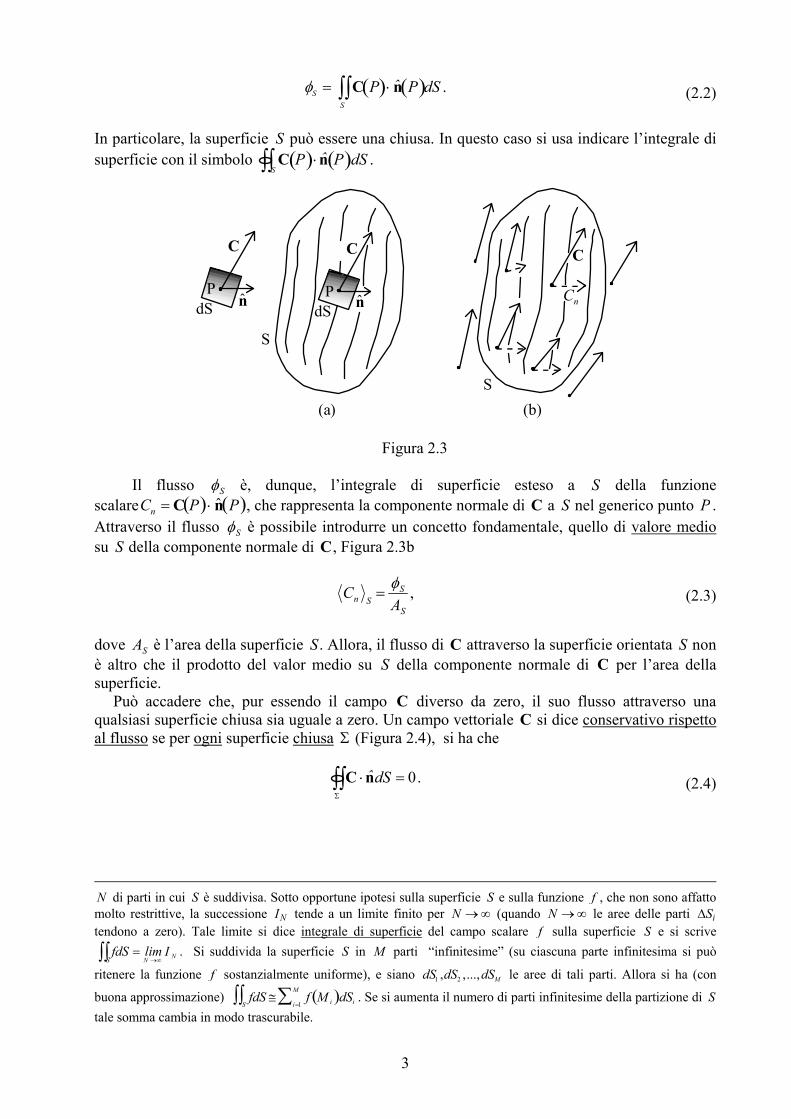
Si consideri una superficie orientata S , in generale aperta, nella regione di spazio in cui è
definito un generico campo vettoriale C; il verso della normale ˆ n è scelto in modo arbitrario, Figura 2.3a.
Il flusso del campo C attraverso un generico elemento (superficie elementare) dS della superficie 1, dΦ , è uguale alla componente di C lungo la normale alla superficie nel punto in cui essa è centrata, C ⋅ ˆ n , per l’area dS dell’elemento,
dφ = C P( )⋅ ˆ n P( )dS . (2.1) Il flusso attraverso l’intera superficie S , φS , è la somma dei contributi di tutte le superfici elementari che compongono S 2, quindi 1 Un elemento (superficie elementare) dS della superficie S è una parte “infinitesima” di S tale che C ⋅ ˆ n su dS è, con buona approssimazione, uniforme. 2 Sia f = f P( ) una funzione definita su di una superficie S . Si divida S in un numero N di parti e siano ∆S1 ,∆S2 ,...,∆S N le aree di tali superfici parziali. Consideriamo per ogni superficie il baricentro Mi . Poniamo
IN = f M i( )∆Sii=1
N∑ . Consideriamo, infine, la successione dei valori di IN che si ottengono aumentando il numero
3
φS = C P( )⋅ ˆ n P( )dS
S∫∫ . (2.2)
In particolare, la superficie S può essere una chiusa. In questo caso si usa indicare l’integrale di superficie con il simbolo
C P( )⋅ ˆ n P( )dS
S∫∫ .
dS
C
nP
S
dS
C
nP
(a) (b)S
C
Cn
Figura 2.3
Il flusso φS è, dunque, l’integrale di superficie esteso a S della funzione scalareCn = C P( )⋅ ˆ n P( ), che rappresenta la componente normale di C a S nel generico punto P . Attraverso il flusso φS è possibile introdurre un concetto fondamentale, quello di valore medio su S della componente normale di C, Figura 2.3b
Cn S =φS
AS
, (2.3)
dove AS è l’area della superficie S . Allora, il flusso di C attraverso la superficie orientata S non è altro che il prodotto del valor medio su S della componente normale di C per l’area della superficie.
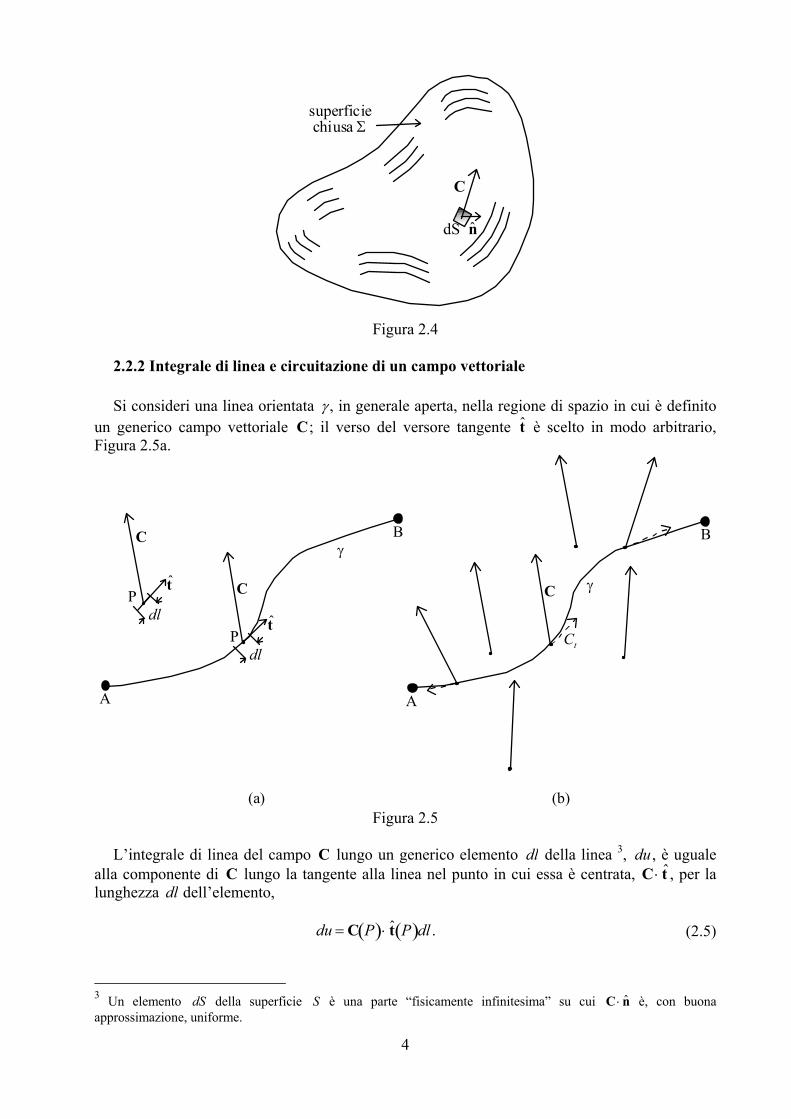
Può accadere che, pur essendo il campo C diverso da zero, il suo flusso attraverso una qualsiasi superficie chiusa sia uguale a zero. Un campo vettoriale C si dice conservativo rispetto al flusso se per ogni superficie chiusa Σ (Figura 2.4), si ha che
C ⋅ ˆ n dS
Σ∫∫ = 0. (2.4)
N di parti in cui S è suddivisa. Sotto opportune ipotesi sulla superficie S e sulla funzione f , che non sono affatto molto restrittive, la successione IN tende a un limite finito per N → ∞ (quando N → ∞ le aree delle parti ∆Si tendono a zero). Tale limite si dice integrale di superficie del campo scalare f sulla superficie S e si scrive
fdS
S∫∫ = limN →∞
I N . Si suddivida la superficie S in M parti “infinitesime” (su ciascuna parte infinitesima si può
ritenere la funzione f sostanzialmente uniforme), e siano dS1 ,dS2 ,...,dSM le aree di tali parti. Allora si ha (con
buona approssimazione) fdSS∫∫ ≅ f M i( )dSii=1
M∑ . Se si aumenta il numero di parti infinitesime della partizione di S tale somma cambia in modo trascurabile.
4
superficiechiusa Σ
C
dS n
Figura 2.4 2.2.2 Integrale di linea e circuitazione di un campo vettoriale
Si consideri una linea orientata γ , in generale aperta, nella regione di spazio in cui è definito
un generico campo vettoriale C; il verso del versore tangente ˆ t è scelto in modo arbitrario, Figura 2.5a.
C
γ
A
B
dl
P
C
t
t
dlP
C γ
A
B
Ct
(a) (b) Figura 2.5
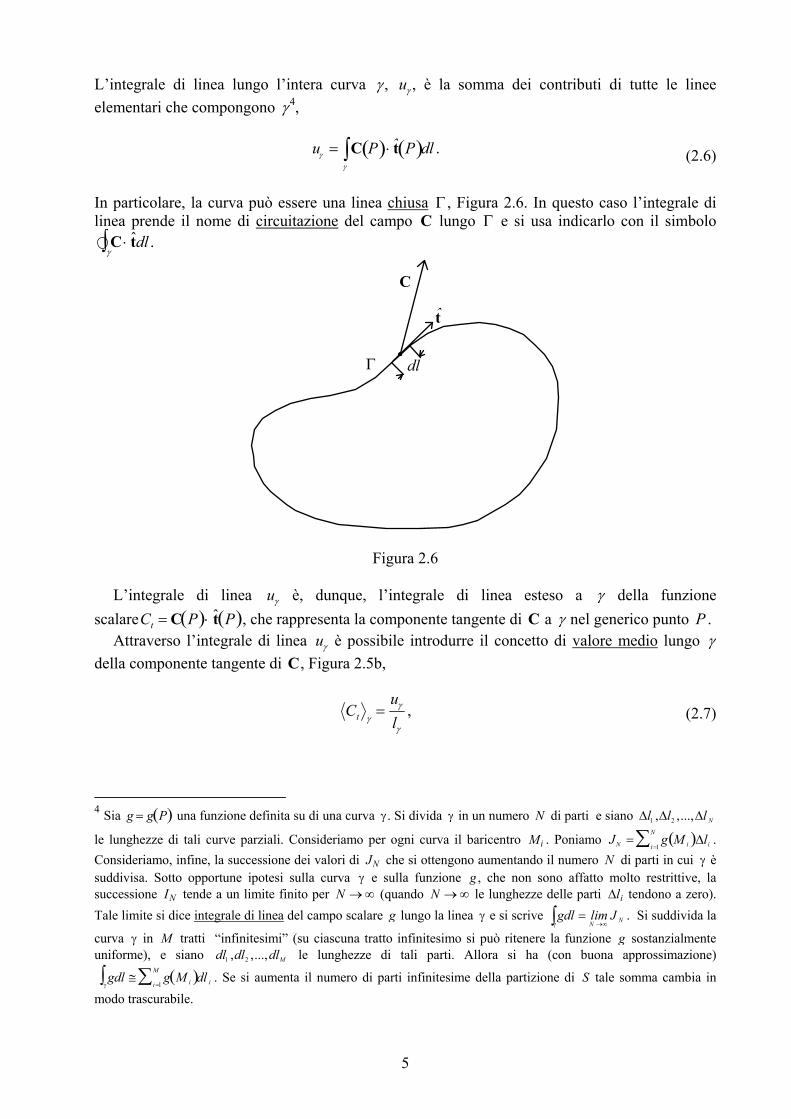
L’integrale di linea del campo C lungo un generico elemento dl della linea 3, du , è uguale
alla componente di C lungo la tangente alla linea nel punto in cui essa è centrata, C ⋅ ˆ t , per la lunghezza dl dell’elemento,
du = C P( )⋅ ˆ t P( )dl . (2.5)
3 Un elemento dS della superficie S è una parte “fisicamente infinitesima” su cui C ⋅ ˆ n è, con buona approssimazione, uniforme.
5
L’integrale di linea lungo l’intera curva γ , uγ , è la somma dei contributi di tutte le linee elementari che compongono γ 4,
uγ = C P( )⋅ˆ t P( )dl
γ∫ . (2.6)
In particolare, la curva può essere una linea chiusa Γ , Figura 2.6. In questo caso l’integrale di linea prende il nome di circuitazione del campo C lungo Γ e si usa indicarlo con il simbolo
C ⋅ ˆ t dlγ∫ .
Γ dl
C
t
Figura 2.6
L’integrale di linea uγ è, dunque, l’integrale di linea esteso a γ della funzione scalareCt = C P( )⋅ ˆ t P( ), che rappresenta la componente tangente di C a γ nel generico punto P .
Attraverso l’integrale di linea uγ è possibile introdurre il concetto di valore medio lungo γ della componente tangente di C, Figura 2.5b,
Ct γ=
uγ
lγ, (2.7)
4 Sia g = g P( ) una funzione definita su di una curva γ . Si divida γ in un numero N di parti e siano ∆l1 ,∆l2 ,...,∆l N
le lunghezze di tali curve parziali. Consideriamo per ogni curva il baricentro Mi . Poniamo JN = g M i( )∆lii=1
N∑ . Consideriamo, infine, la successione dei valori di JN che si ottengono aumentando il numero N di parti in cui γ è suddivisa. Sotto opportune ipotesi sulla curva γ e sulla funzione g , che non sono affatto molto restrittive, la successione IN tende a un limite finito per N → ∞ (quando N → ∞ le lunghezze delle parti ∆li tendono a zero). Tale limite si dice integrale di linea del campo scalare g lungo la linea γ e si scrive
gdl
γ∫ = limN →∞
J N . Si suddivida la
curva γ in M tratti “infinitesimi” (su ciascuna tratto infinitesimo si può ritenere la funzione g sostanzialmente uniforme), e siano dl1 ,dl2 ,...,dlM le lunghezze di tali parti. Allora si ha (con buona approssimazione)
gdlγ∫ ≅ g M i( )dl ii =1
M∑ . Se si aumenta il numero di parti infinitesime della partizione di S tale somma cambia in modo trascurabile.

6
dove lγ è la lunghezza della curva γ . Allora, l’integrale di linea di C lungo la linea orientata γ non è altro che il prodotto del valor medio lungo γ della componente tangente di C per la lunghezza della curva.
Può accadere che, pur essendo il campo C diverso da zero, la sua circuitazione lungo una qualsiasi linea (chiusa) sia uguale a zero. Un campo vettoriale C si dice conservativo rispetto alla circuitazione se per ogni linea chiusa Γ , si ha che
C ⋅ˆ t dl = 0
Γ∫ . (2.8)
Il campo elettrico in condizioni stazionarie (campo elettrostatico) è un esempio di campo conservativo rispetto alla circuitazione. 2.3 Principio della conservazione della carica per sistemi elettricamente chiusi
Indipendentemente dalla posizione e dalla velocità delle cariche, la densità di carica e il campo di densità di corrente devono verificare un’equazione che discende direttamente dalla conservazione della carica.
La carica elettrica netta contenuta in una data regione di spazio è la somma delle cariche positive e negative contenute in essa:
Qt = Q+ + Q− ; (2.9)
Q+ e Q− indicano, rispettivamente, la carica totale positiva e la carica totale negativa contenute nella regione di spazio in considerazione. In generale, Q+ e Q− , e quindi Qt , variano nel tempo. Ciò è dovuto al fatto che le cariche si muovono sotto l’azione sia di campi elettromagnetici che di altri tipi di campi di forza, e quindi, migrano, da una regione all’altra dello spazio.
Si dice che un sistema è elettricamente chiuso se la superficie che lo delimita non è attraversata da cariche.
Legge della conservazione della carica elettrica per un sistema elettricamente chiuso
In un sistema elettricamente chiuso la carica elettrica totale non varia nel tempo.
♦ Questa è una delle leggi basilari dell’elettromagnetismo. La cariche elettriche possono
muoversi e, quindi, spostarsi da una parte all’altra della regione di spazio elettricamente chiusa, ma non possono essere né “create” né “distrutte”.
Se si esclude la possibilità che uguali quantità di carica positiva e negativa possano essere simultaneamente create o distrutte5, come immediata conseguenza della conservazione della carica abbiamo che sia il numero di cariche elementari positive, sia il numero di cariche elementari negative contenute in un sistema elettricamente chiuso non variano nel tempo.
5 Ciò, in realtà, può accadere negli acceleratori di particelle dove le particelle elementari vengono accelerate fino a velocità prossime a quelle della luce nel vuoto.

7
S0
S1
Ω1
Ω 2
Figura 2.7 Sistema elettromagnetico chiuso: la superficie S0 non è attraversata da cariche elettriche.
Consideriamo un sistema elettromagnetico chiuso che occupa la regione di spazio Ω0 delimitata dalla superficie S0 (Figura 2.7). Consideriamo ora una parte di questo sistema, indichiamo con Ω1 la regione di spazio che essa occupa e con S1 la superficie che delimita Ω1 ; indichiamo con Ω2 la restante parte della regione Ω0 . Inoltre, indichiamo con Q1 t( ) la carica totale contenuta in Ω1 e con Q2 t( ) la carica totale contenuta in Ω2 ad un generico istante di tempo t. Allora, per la legge della conservazione della carica si ha che
Q1 t( )+ Q2 t( ) = Q0 , (2.10)
dove Q0 è la carica totale contenuta nel sistema chiuso, che è costante nel tempo. In conseguenza della (2.10) si ha che, se la carica Q1 diminuisce nel tempo, invece la carica
Q2 aumenta, e viceversa. La carica Q1 diminuisce (aumenta) nel tempo, in senso relativo, se cariche positive (negative) si spostano dalla regione Ω1 alla regione Ω2 e/o cariche negative (positive) si spostano dalla regione Ω2 alla regione Ω1 , attraversando la superficie S1 . In conclusione, la carica Q1, e di conseguenza la carica Q2 , variano quando c’è una flusso netto di carica elettrica attraverso la superficie S1 , cioè, quando c’è una corrente elettrica attraverso S1 .
Può anche accadere che, pur essendovi particelle cariche che attraversano la superficie S1 , le cariche Q1 e Q2 non variano nel tempo. Il lettore cerchi di descrivere una situazione in cui ciò si verifica. 2.4 Legge della conservazione della carica per sistemi elettricamente aperti. Equazione di continuità
Nel precedente paragrafo è stata enunciata la legge della conservazione della carica elettrica per sistemi elettricamente chiusi: la carica contenuta entro una data regione è costante nel tempo

8
se l’intensità di corrente che attraversa la superficie che la delimita è uguale a zero. Quando, invece, la superficie è attraversata da corrente elettrica, la carica elettrica, in generale, varia nel tempo (Figura 2.8). 2.4.1 Legge della conservazione della carica per regioni elettricamente aperte
Sia assegnata una distribuzione di cariche elettriche in moto nello spazio libero, con densità volumetrica di carica ρ = ρ P;t( ) e densità volumetrica di corrente J = J P;t( ) . Si consideri una regione Ω dello spazio, invariabile nel tempo, e si indichi con Σ la superficie chiusa che rappresenta la sua frontiera, orientata con la normale ˆ n diretta verso l’esterno, Figura 2.8.
L’intensità di corrente che attraversa la superficie orientata Σ al generico istante t è data da
iΣ t( )= J ⋅ ˆ n dS
Σ∫∫ . (2.11)
La carica elettrica totale che al generico istante t si trova nella regione Ω è data da:
QV t( )= ρ P;t( )dV
Ω∫∫∫ . (2.12)
C’è una relazione tra iΣ e QV ? La risposta è si.
Σ
Ω
n
Figura 2.8 La carica totale contenuta nella regione Ω varia nel tempo in presenza di una
corrente elettrica attraverso la superficie chiusa Σ.
La quantità di carica netta che attraversa la superficie orientata Σ nell’intervallo di tempo elementare6 t, t + dt( ) è data da
dqΣ = iΣ t( )dt ; (2.13)
dqΣ è la quantità di carica che effettivamente abbandona la regione Ω nell’intervallo t, t + dt( ) se dqΣ > 0; se, invece, dqΣ < 0, dqΣ è la quantità di carica che effettivamente entra nella regione Ω nell’intervallo t, t + dt( ).
Si indichi con dQΩ la variazione della carica elettrica contenuta nella regione Ω durante l’intervallo di tempo t, t + dt( ),
dQΩ = QΩ t + dt( )− QΩ t( ). (2.14)
6 Con intervallo di tempo elementare intendiamo un intervallo “fisicamente infinitesimo”.
9
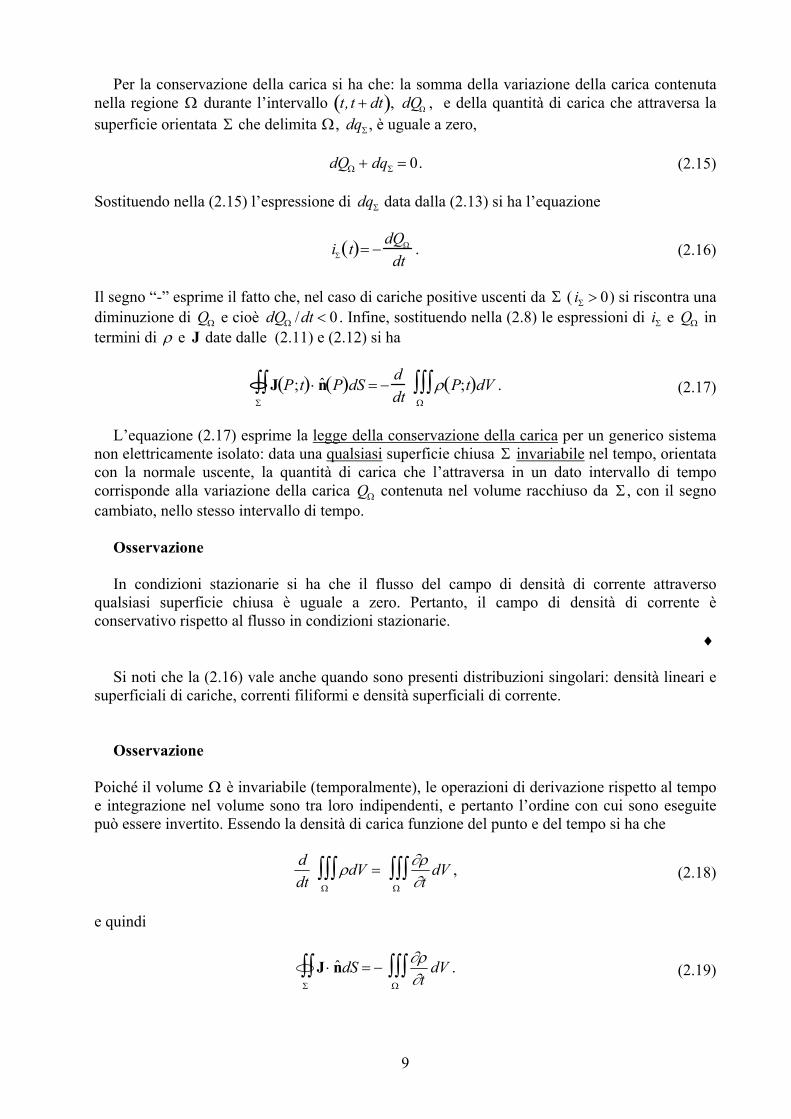
Per la conservazione della carica si ha che: la somma della variazione della carica contenuta nella regione Ω durante l’intervallo t, t + dt( ), dQΩ , e della quantità di carica che attraversa la superficie orientata Σ che delimita Ω, dqΣ, è uguale a zero,
dQΩ + dqΣ = 0. (2.15) Sostituendo nella (2.15) l’espressione di dqΣ data dalla (2.13) si ha l’equazione
iΣ t( )= −dQΩ
dt. (2.16)
Il segno “-” esprime il fatto che, nel caso di cariche positive uscenti da Σ ( iΣ > 0) si riscontra una diminuzione di QΩ e cioè dQΩ /dt < 0. Infine, sostituendo nella (2.8) le espressioni di iΣ e QΩ in termini di ρ e J date dalle (2.11) e (2.12) si ha
J P;t( )⋅ ˆ n P( )dSΣ
∫∫ = −ddt
ρ P;t( )dVΩ
∫∫∫ . (2.17)
L’equazione (2.17) esprime la legge della conservazione della carica per un generico sistema
non elettricamente isolato: data una qualsiasi superficie chiusa Σ invariabile nel tempo, orientata con la normale uscente, la quantità di carica che l’attraversa in un dato intervallo di tempo corrisponde alla variazione della carica QΩ contenuta nel volume racchiuso da Σ , con il segno cambiato, nello stesso intervallo di tempo.
Osservazione
In condizioni stazionarie si ha che il flusso del campo di densità di corrente attraverso qualsiasi superficie chiusa è uguale a zero. Pertanto, il campo di densità di corrente è conservativo rispetto al flusso in condizioni stazionarie.
♦
Si noti che la (2.16) vale anche quando sono presenti distribuzioni singolari: densità lineari e superficiali di cariche, correnti filiformi e densità superficiali di corrente.
Osservazione Poiché il volume Ω è invariabile (temporalmente), le operazioni di derivazione rispetto al tempo e integrazione nel volume sono tra loro indipendenti, e pertanto l’ordine con cui sono eseguite può essere invertito. Essendo la densità di carica funzione del punto e del tempo si ha che
ddt
ρdVΩ∫∫∫ =
∂ρ∂t
dVΩ∫∫∫ , (2.18)
e quindi
J ⋅ ˆ n dSΣ∫∫ = −
∂ρ∂t
dVΩ∫∫∫ . (2.19)
10
E’ possibile dimostrare che l’equazione (2.19) vale anche per superfici chiuse variabili nel tempo (superfici che si muovono e si deformano),
J ⋅ ˆ n dSΣ t( )∫∫ = −
∂ρ∂t
dVΩ t( )∫∫∫ . (2.20)
(E’ evidente che se varia Σ nel tempo varia anche la regione Ω che essa delimita.)
L’equazione (2.17) va solo se Σ , e quindi Ω, sono invariabili nel tempo. Infatti, dalla (2.20) si ottiene la (2.17) solo se Σ e Ω sono invariabili.
♦ 2.4.2 Equazione di continuità
L’equazione (2.17) deve essere verificata per ogni superficie Σ invariabile nel tempo, e
quindi per ogni Ω. E’ necessario che la (2.17) sia effettivamente imposta per ogni superficie chiusa?
Siccome una qualsiasi regione finita dello spazio può essere sempre decomposta in regioni elementari 7, basta imporre che la (2.17) sia verificata per ogni possibile regione elementare affinché essa sia verificata per una generica regione finita. Come verificheremo tra poco bisogna distinguere tra le regioni in cui le distribuzioni di carica e di corrente sono regolari e le regioni in cui abbiamo distribuzioni singolari.
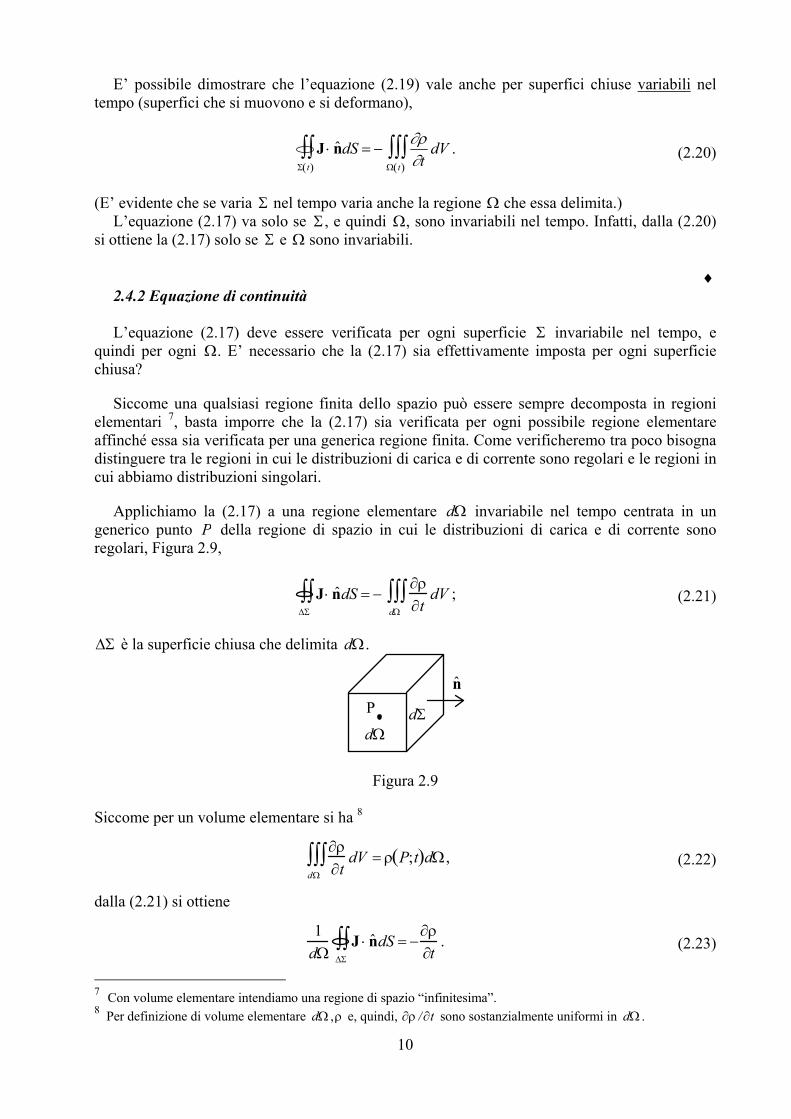
Applichiamo la (2.17) a una regione elementare dΩ invariabile nel tempo centrata in un generico punto P della regione di spazio in cui le distribuzioni di carica e di corrente sono regolari, Figura 2.9,
J ⋅ ˆ n dS∆Σ
∫∫ = −∂ρ∂t
dVdΩ
∫∫∫ ; (2.21)
∆Σ è la superficie chiusa che delimita dΩ.
P
dΩdΣ
n
Figura 2.9 Siccome per un volume elementare si ha 8
∂ρ∂t
dVdΩ
∫∫∫ = ρ P;t( )dΩ, (2.22) dalla (2.21) si ottiene
1dΩ
J ⋅ ˆ n dS∆Σ
∫∫ = −∂ρ∂t
. (2.23)
7 Con volume elementare intendiamo una regione di spazio “infinitesima”. 8 Per definizione di volume elementare dΩ ,ρ e, quindi, ∂ρ /∂t sono sostanzialmente uniformi in dΩ .
11
Si consideri, ora, il rapporto
J ⋅ ˆ n dS∆Σ∫∫
dΩ, (2.24)
che compare a sinistra dell’equazione (2.23). Pur essendo ∆Σ la superficie di bordo di una regione elementare, per calcolare l’integrale di superficie che compare al numeratore della (2.23) non si può ragionare così come è stato fatto per l’integrale di volume che compare nella (2.22): pur essendo J con buona approssimazione uniforme nella regione dΩ e, quindi, con buona approssimazione uniforme anche sulla superficie ∆Σ , J ⋅ ˆ n non è affatto uniforme su ∆Σ .
E’ evidente che l’integrale
J ⋅ ˆ n dS∆Σ∫∫ tende a zero per dΩ tendente a zero, quindi la (2.24) è il
rapporto tra due infinitesimi. Si può dimostrare che il rapporto (2.24) è finito ed è indipendente sia dalla forma della regione elementare dΩ e, quindi, dalla forma della superficie ∆Σ , che dal valore di dΩ: esso dipende solo dal comportamento del campo vettoriale J nell’intorno del punto P . A tale rapporto si dà il nome di divergenza del campo vettoriale J nel punto P e lo si indica con ∇ ⋅ J 9 ,
J ⋅ ˆ n dSd Σ∫∫
dΩ≡ ∇ ⋅ J per dΩ → 0. (2.25)
Dunque, la divergenza di un campo vettoriale in un generico punto P non è altro che il
rapporto tra il flusso del campo attraverso la frontiera di una qualsiasi regione elementare centrata in P e il volume della regione elementare stessa. E’ interessante osservare che per determinare il rapporto (2.24) e, quindi, la divergenza di J , non è necessario calcolare il flusso di J attraverso una superficie chiusa elementare. Quando il campo vettoriale J è espresso attraverso le componenti cartesiane Jx = Jx x,y,z;t( ), Jy = Jy x, y,z;t( ), Jz = Jz x,y,z;t( ), il calcolo della divergenza è particolarmente semplice. Si ha, infatti
∇ ⋅ J =
∂ Jx
∂ x+
∂ Jy
∂ y+
∂ Jz
∂ z. (2.26)
Il calcolo della divergenza risulta essere semplice anche quando il campo vettoriale è espresso attraverso altri tipi di componenti, ad esempio, componenti cilindriche e sferiche. In questi casi l’espressione della divergenza risulta essere un po’ più complessa di quella descritta dalla (2.18) (vedi in Appendice 1). E’ evidente che l’espressione (2.26) e, quindi, l’operatore di divergenza ha significato solo se tutte le componenti del campo di densità di corrente sono continue.
Sostituendo la (2.25) nella (2.23) si ha che in ogni punto P e per ogni t
∇ ⋅ J = −∂ρ∂t
. (2.27) Questa relazione, detta equazione di continuità della corrente, esprime il principio della conservazione della carica in forma locale, mentre la (2.17) (equazione (2.20)) la esprime in forma integrale. La (2.27) mette in relazione i valori di J e ∂ρ /∂t nel generico punto P e i valori di J nei punti vicini a P .
9 Il concetto di divergenza di un campo vettoriale è generale, non dipende dalla particolare natura fisica del campo vettoriale in esame. Per la sua applicabilità è richiesto solo che il campo vettoriale sia continuo.
12
Quale è il significato fisico della (2.27)? Per definizione di ∇ ⋅ J, ∇ ⋅ J( )dΩ rappresenta proprio il flusso di J attraverso la superficie ∆Σ che delimita la regione elementare dΩ centrata nel punto P . Se moltiplichiamo ambo i membri della (2.19) per dΩ si ottiene proprio la legge della conservazione della carica per la regione elementare dΩ delimitata dalla superficie elementare ∆Σ . Osservazione Integrando ambo i membri della (2.27) su un volume finito Ω t( ) variabile nel tempo e applicando il teorema di Gauss 10 (teorema della divergenza) si ottiene l’equazione (2.20).
♦
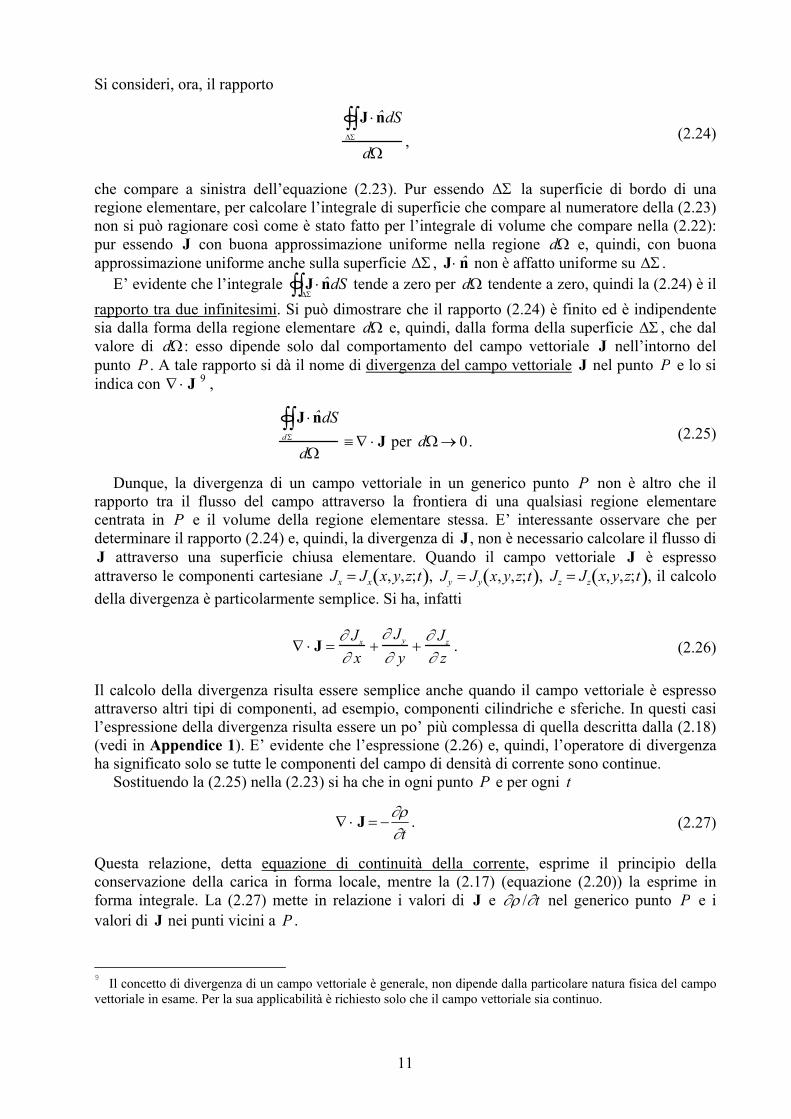
L’equazione di continuità (2.27) vale solo nelle regioni in cui il campo di densità di corrente è regolare. Come tra poco vedremo in presenza di una distribuzione di carica con densità superficiale la componente normale del campo di densità di corrente è discontinua.
n1
n 2
PdS1
dS2dSσ
Sσ
(a) (b)
Sσ
P
n1
2
Figura 2.10 Superficie elementare di tipo “M”
Si assuma che su una superficie Sσ sia definita una densità di carica superficiale σ . Si
imponga la conservazione della carica per una superficie chiusa elementare ∆Σ di tipo cilindrica, con la superficie laterale dSL di area trascurabile rispetto11 alla area dS di ciascuna base e con le due basi poste rispettivamente da ambo i lati della superficie Sσ , Figura 2.10a. La superficie ∆Σ è centrata nel generico punto P della superficie Sσ . In altre parole, consideriamo una “monetina” tagliata longitudinalmente a metà da Sσ
12. Le normali ˆ n 1 e ˆ n 2 alle due basi dS1 e dS2 della monetina sono orientate come indicato in Figura 2.10a, cioè in modo che risultino uscenti dalla superficie chiusa ∆Σ . Inoltre, indichiamo con dSσ la parte di Sσ che taglia la monetina. Le superfici dS1, dS2 e dSσ sono superfici fisicamente infinitesime di area dS . La s
Applicando la legge della conservazione della carica si ha
10 Il teorema di Gauss (teorema della divergenza) afferma che
A⋅ ˆ n dS
∂ V∫∫ = ∇ ⋅ AdvV∫∫∫ dove ∂V è la frontiera della
regione V con la normale ˆ n rivolta verso l’esterno: il flusso di un generico campo vettoriale A attraverso la superficie chiusa ∂V è uguale all’integrale di volume della divergenza di A esteso alla regione V . 11 L’area della superficie laterale dSL è un infinitesimo di ordine superiore rispetto a dS . 12 Nel seguito ci riferiremo a una superficie elementare di questo tipo come a una “superficie di tipo M”. Il ricorso a questo tipo di superfici elementari è suggerito dalla necessità di studiare il comportamento del campo nelle immediate vicinanze di Sσ , da entrambi i lati.

13
J ⋅ ˆ n dS∆Σ
∫∫ = −dQ∆Σ
dt, (2.28)
dove Q∆Σ è la carica elettrica contenuta nella superficie ∆Σ . L’unica distribuzione di carica che contribuisce a Q∆Σ è, per ipotesi, la distribuzione di carica con densità superficiale definita sulla superficie Sσ . Allora Q∆Σ è la carica superficiale contenuta sulla superficie elementare dSσ ed è data da
Q∆Σ = ρ P;t( )dS . (2.29) Il flusso attraverso ∆Σ può essere espresso, utilizzando la proprietà di additività degli integrali, come:
J ⋅ ˆ n dS
∆Σ∫∫ = J ⋅ ˆ n 1dS
dS1
∫∫ + J ⋅ ˆ n 2dSdS 2
∫∫ + J ⋅ ˆ n LdSdS L
∫∫ . (2.30)
Essendo per ipotesi dS1 e dS2 due superfici elementari, si ha
J ⋅ ˆ n 1dS
dS1
∫∫ = J1 ⋅ ˆ n 1dS e
J ⋅ ˆ n 2dSdS 2
∫∫ = J 2 ⋅ ˆ n 2dS (2.31)
avendo indicato con J1 e J2 i valori dei campi rispettivamente sulle due basi. Essendo l’altezza del cilindro ∆Σ un infinitesimo, J1 e J2 sono, rispettivamente, i valori del campo di densità corrente in corrispondenza del punto P , dall’uno e dall’altro lato di Sσ .
Trascurando il contributo del flusso attraverso la superficie laterale della monetina J ⋅ ˆ n LdS
dSL∫∫ perché per ipotesi infinitesimo di ordine superiore rispetto agli altri due termini,
combinando le (2.30) e (2.31) si ottiene
J ⋅ ˆ n dS
∆Σ∫∫ = J1 ⋅ ˆ n 1 + J 2 ⋅ ˆ n 2( )dS . (2.32)
Sostituendo le (2.29) e (2.32) nell’equazione (2.28) si ha
J1 ⋅ ˆ n 1 + J2 ⋅ ˆ n 2 = −∂σ∂t
. (2.33)
La derivata totale rispetto al tempo diventa derivata parziale perché σ e quindi Q∆Σ dipendono anche dal punto. Scelta ora la normale ˆ n ad Sσ nel punto P coincidente con ˆ n 1 (Figura 2.10b) si ha ˆ n 1 = ˆ n e ˆ n 2 = − ˆ n e quindi, dalla (2.33)
J1 − J2( )⋅ ˆ n = −∂σ∂t
. (2.34)
Indicando con Jn1 = J1 ⋅ ˆ n e Jn2 = J2 ⋅ ˆ n le componenti di J1 e J2 lungo la normale ˆ n la (2.34) può essere anche scritta in questo modo,
Jn1 − Jn2 = −∂σ∂t
. (2.35)
14
Questo risultato costituisce un nuovo enunciato, in forma locale, della legge della conservazione della carica in corrispondenza di distribuzioni di cariche con densità superficiale e afferma: Nei punti del campo di densità di corrente in cui sia presente una carica distribuita con densità superficiale σ , il campo di densità di corrente presenta una discontinuità nella componente normale alla superficie su cui è distribuita la carica; la differenza tra i valori della componente normale di J , considerati dall’uno e dall’altro lato di questa superficie, è uguale (a meno del segno) alla derivata parziale rispetto al tempo di σ nel punto considerato. Nelle regioni prive di cariche superficiali la componente normale di J è continua. E’ appena il caso di notare che, a causa della discontinuità, la divergenza del campo J non è definita in corrispondenza dei punti di Sσ .
Osservazione
In condizioni stazionarie la divergenza del campo di densità di corrente è in tutti i punti in cui è definita uguale a zero e la componente normale è ovunque continua. Un campo vettoriale si dice che è solenoidale in una certa regione dello spazio se in quella regione è continuo e la sua divergenza è ovunque uguale a zero. In condizioni stazionarie il campo di densità di corrente è ovunque solenoidale.
Un campo conservativo rispetto al flusso è ovunque solenoidale; un campo ovunque solenoidale è conservativo rispetto al flusso.
♦ 2.5 Le equazioni di Maxwell nel vuoto in forma integrale
Un campo vettoriale, indipendentemente dal suo significato fisico, è specificato completamente se sono assegnati il valore del suo flusso attraverso una qualsiasi superficie chiusa e il valore della sua circuitazione lungo una qualsiasi linea chiusa. Se di un campo vettoriale è noto solo il flusso attraverso superfici chiuse o solo la circuitazione, allora il campo vettoriale non è univocamente determinato. Questa è una proprietà estremamente importante dei campi vettoriali. Pertanto, le leggi che governano il campo elettromagnetico possono essere espresse proprio per mezzo dei flussi attraverso superfici chiuse e le circuitazioni del campo elettrico e del campo magnetico.
Legge di Gauss per il campo elettrico
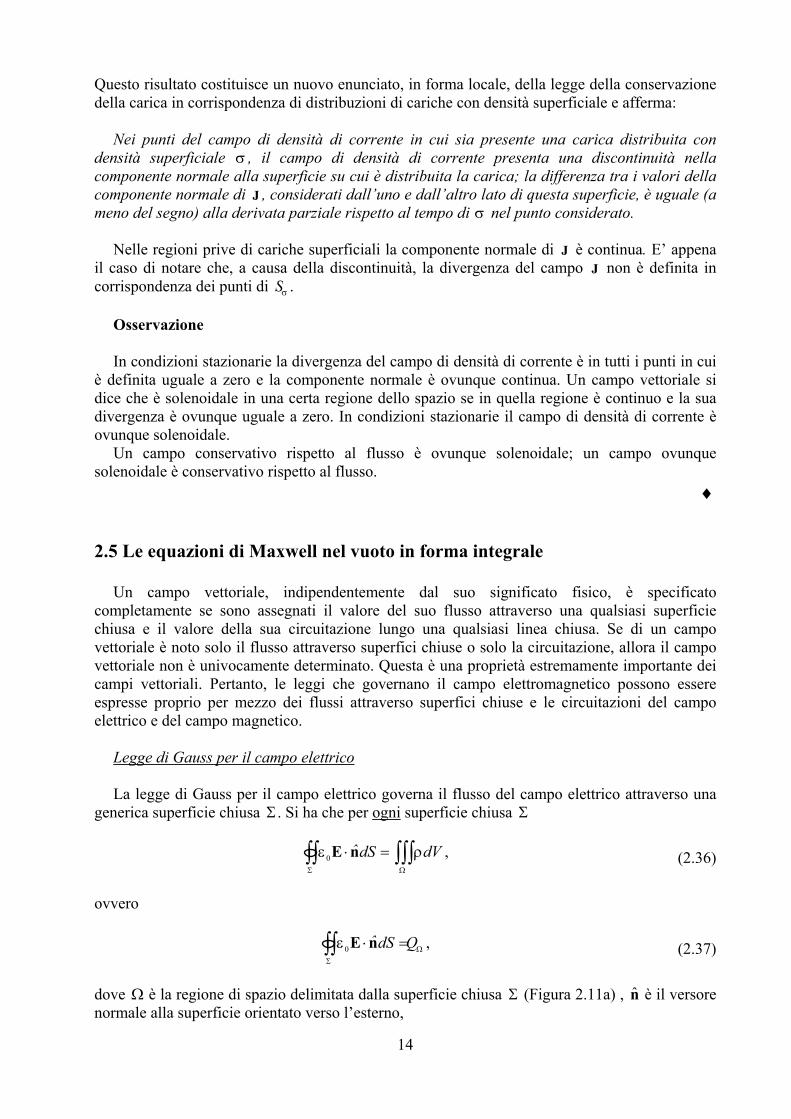
La legge di Gauss per il campo elettrico governa il flusso del campo elettrico attraverso una generica superficie chiusa Σ . Si ha che per ogni superficie chiusa Σ
ε0E ⋅ ˆ n dS = ρdV
Ω∫∫∫
Σ∫∫ , (2.36)
ovvero
ε0E ⋅ ˆ n dS =
Σ∫∫ QΩ , (2.37)
dove Ω è la regione di spazio delimitata dalla superficie chiusa Σ (Figura 2.11a) , ˆ n è il versore normale alla superficie orientato verso l’esterno,
15
ε0 ≅ 8.854 ×10−12 F/m (2.38) è la costante dielettrica del vuoto e QΩ è la carica elettrica netta contenuta in Ω. Il “farad” (F) è l’unità di misura della capacità nel Sistema Internazionale.
Si noti che la (2.36), ovvero la (2.37), sono valide anche quando sono presenti cariche puntiformi, distribuzioni di carica con densità lineare e distribuzioni di carica con densità superficiale: alla carica QΩ contribuiscono sia la distribuzione di densità di carica volumetrica che le distribuzioni singolari eventualmente presenti.
superficiechiusa Σ
C
dS n
regione Ωracchiusa da Σ
n
(a) (b)
ρ = ρ P;t( ) ρ = 0
Figura 2.11
La “sorgente” per il flusso del campo elettrico attraverso una superficie chiusa è la carica elettrica netta contenuta all’interno della superficie. Se non ci sono cariche all’interno di Σ il valor medio della componente normale del campo elettrico su Σ è uguale a zero anche in presenza di cariche vicine a Σ situate, però, all’esterno della superficie. In questo caso il flusso netto del campo elettrico attraverso Σ è uguale a zero: il flusso di E entrante attraverso una parte di Σ è uguale al flusso di E uscente attraverso la restante parte, Figura 2.11b.
Le dimensioni del flusso del campo elettrico sono evidentemente quelle di un campo elettrico per una superficie: E[ ] S[ ] . La sua unità di misura nel Sistema Internazionale è data da Vm.
Legge di Gauss per il campo magnetico La legge di Gauss governa il flusso del campo magnetico attraverso una generica superficie
chiusa Σ . Si ha che
B ⋅ ˆ n dS = 0
Σ∫∫ . (2.39)
Il campo magnetico è conservativo rispetto al flusso. Ciò è una diretta conseguenza dell’assenza dei “monopoli” magnetici.
Osservazione
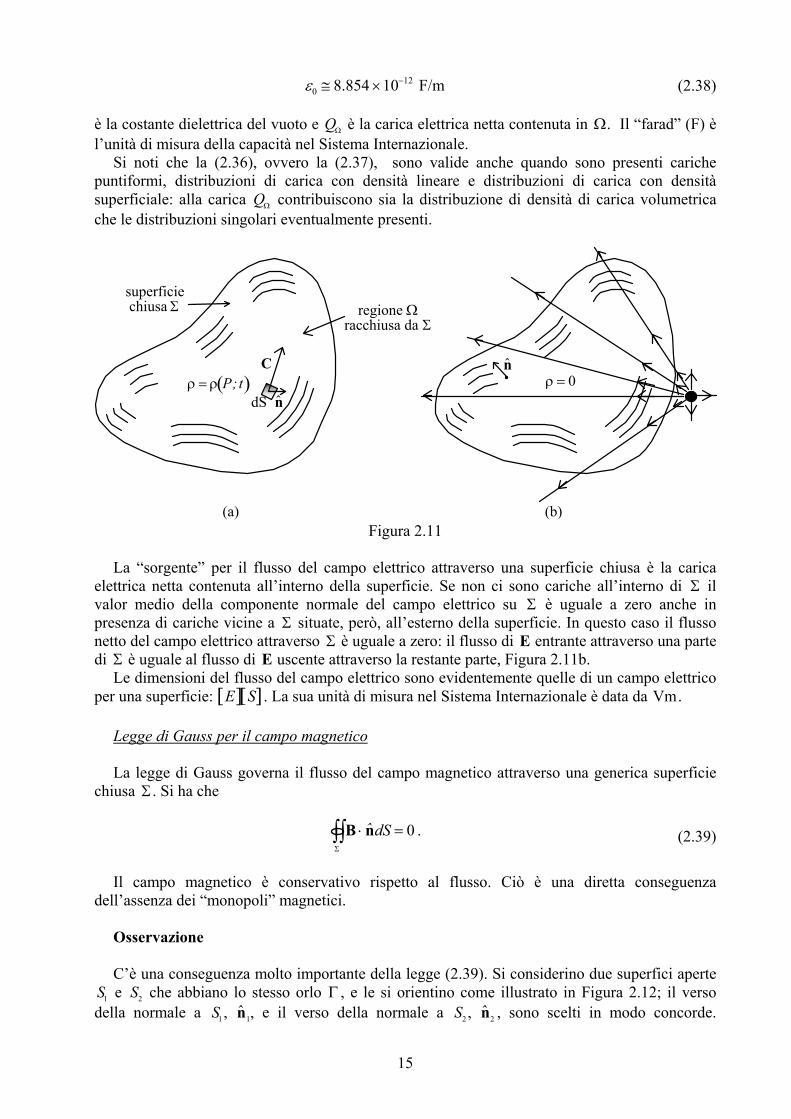
C’è una conseguenza molto importante della legge (2.39). Si considerino due superfici aperte S1 e S2 che abbiano lo stesso orlo Γ , e le si orientino come illustrato in Figura 2.12; il verso della normale a S1 , ˆ n 1, e il verso della normale a S2 , ˆ n 2 , sono scelti in modo concorde.
16
Indichiamo con φ1 e φ2 il flusso del campo magnetico attraverso le superfici S1 e S2 , rispettivamente,
φ1 = B ⋅ ˆ n 1dS
S1
∫∫ , φ2 = B ⋅ ˆ n 2dS
S 2
∫∫ . (2.40)
n1
n
Γ
S1
S2
Figura 2.12
L’unione delle due superfici aperte S1 e S2 forma una superficie chiusa che indichiamo con Σ; orientiamo la superficie Σ scegliendo come verso per la normale ˆ n quello uscente. Consideriamo, ora, il flusso del campo magnetico attraverso la superficie Σ . Per la proprietà additiva dell’integrale di superficie si ha che
B⋅ˆ n dS =
Σ∫∫ B⋅ˆ n dS
S1
∫∫ + B⋅ˆ n dSS 2
∫∫ . (2.41)
Essendo su S1 ˆ n = ˆ n 1 e su S2 ˆ n = − ˆ n 2 si ottiene immediatamente
B ⋅ ˆ n dS =
Σ∫∫ B ⋅ ˆ n 1dS
S1
∫∫ − B ⋅ ˆ n 2dSS2
∫∫ =φ1 −φ2 . (2.42)
Applicando la legge (2.39) dalla (2.42) si ha immediatamente che
φ1 = φ2 . (2.43) In conclusione, i flussi del campo magnetico attraverso due superfici aperte distinte che hanno lo stesso orlo sono uguali (con una opportuna scelta del verso delle normali): il flusso del campo magnetico dipende solo da ciò che le due superfici hanno in comune, cioè l’orlo. Per questa ragione si è soliti parlare nel caso magnetico di “flusso concatenato con una linea chiusa”, senza specificare la superficie. Le dimensioni del flusso del campo magnetico sono evidentemente quelle di un campo magnetico per una superficie: φ[ ]= B[ ] S[ ] . La sua unità di misura nel Sistema Internazionale è data da Tm2 ; ad essa si dà il nome di “weber” (Wb).

17
♦
Legge di Faraday-Neumann La seconda legge dell’elettromagnetismo governa la circuitazione del campo elettrico lungo
una generica linea (chiusa) Γ invariabile nel tempo. Si ha che
E ⋅ˆ t dl
Γ∫ = −
ddt
B ⋅ ˆ n dSS∫∫ , (2.44)
ovvero
E ⋅ˆ t dl
Γ∫ = −
dΦΓ
dt, (2.45)
dove S è una generica superficie aperta che ha come orlo la linea chiusa Γ , ˆ n è il versore normale alla superficie orientato concordemente con il verso di percorrenza scelto per Γ secondo la regola della “mano destra”, Figura 2.13, e ΦΓ è il flusso del campo magnetico concatenato con la linea Γ .
n
Γ
S
Figura 2.13
La “sorgente” per la circuitazione del campo elettrico lungo una generica linea chiusa Γ è la derivata rispetto al tempo, con il segno cambiato, del flusso del campo magnetico concatenato con Γ . In condizioni stazionarie la circuitazione del campo elettrico lungo una generica linea chiusa è uguale a zero: il valor medio della componente tangente del campo elettrico lungo la linea chiusa è uguale a zero. Dunque, in condizioni stazionarie il campo elettrico è conservativo rispetto alla circuitazione.
Osservazione
Si considerino due superfici aperte S1 e S2 che abbiano come orlo la curva chiusa Γ , e le si orientino concordemente con il verso di Γ , Figura 2.12. Dalla legge di Faraday-Neumann si ha che
E ⋅ˆ t dl
Γ∫ = −
ddt
B ⋅ ˆ n 1dSS1
∫∫ , (2.46)
e

18
E ⋅ˆ t dl
Γ∫ = −
ddt
B ⋅ ˆ n 2dSS 2
∫∫ . (2.47)
Sottraendo membro queste due equazioni si ottiene
0 = −ddt
B ⋅ ˆ n 1dSS1
∫∫ +ddt
B ⋅ ˆ n 1dSS1
∫∫ =ddt
B ⋅ ˆ n 1dSS1
∫∫ − B ⋅ ˆ n 1dSS1
∫∫
. (2.48)
L’unione delle due superfici aperte S1 e S2 forma una superficie chiusa che indichiamo con Σ; orientiamo la superficie Σ scegliendo come verso per la normale ˆ n quello uscente. Siccome su S1 ˆ n = ˆ n 1 e su S2 ˆ n = − ˆ n 2 si ottiene immediatamente
B ⋅ ˆ n dS =
Σ∫∫ B ⋅ ˆ n 1dS
S1
∫∫ − B ⋅ ˆ n 2dSS2
∫∫ = B ⋅ ˆ n dSΣ∫∫ . (2.49)
Combinando le (2.48) e (2.49) si che
ddt
B ⋅ ˆ n dSΣ∫∫
= 0, (2.50)
quindi
B⋅ˆ n dS
Σ∫∫ = K = costan te (nel tempo). (2.51)
Dunque, la legge di Faraday-Neumann implica che il flusso del campo magnetico attraverso una generica superficie è costante nel tempo. La costante K deve essere necessariamente uguale a zero perché c’è almeno un istante in cui il campo magnetico è stato uguale a zero.
♦
Osservazione
L’integrale di linea del campo elettrico lungo una generica curva orientata γ è, per definizione, la tensione elettrica lungo γ , Figura 2.14a,
vγ = E ⋅ˆ t dl
γ∫ . (2.52)
La tensione elettrica lungo γ rappresenta il lavoro che il campo elettrico compierebbe su una carica elettrica puntiforme unitaria se si muovesse da un estremo all’altro di γ concordemente con il verso con cui la curva è orientata.. Nel Sistema Internazionale la tensione elettrica si misura in “volt” (V). Si considerino due curve, γ1 e γ2 , che abbiano gli stessi punti estremi A e B, Figura 2.14b; si orientino entrambe le curve concordemente con il verso che va dal punto A al punto B, e si indichino con ˆ t 1 e ˆ t 2 i rispettivi versori tangenti. L’unione delle due curve γ1 e γ2 forma una curva chiusa Γ ; si orienti la linea Γ in modo concorde con il verso di γ1. Indichiamo con v1 e v2 la tensione elettrica lungo γ1 e γ2 , rispettivamente,

19
v1 = E ⋅ˆ t 1dl
γ1
∫ , v2 = E ⋅ˆ t 2dl
γ 2
∫ . (2.53)
A
B
γ
t
A
B
γ1
γ 2t 2
t 1
t
(a) (b) Figura 2.14
Per la proprietà additiva dell’integrale di linea si ha che
E ⋅ˆ t dl
Γ∫ = E ⋅ˆ t dl
γ 1
∫ + E ⋅ˆ t dlγ 2
∫ . (2.54)
Essendo lungo γ1 ˆ t = ˆ t 1 e lungo γ2 ˆ t = −ˆ t 2 si ottiene immediatamente
E ⋅ˆ t dl
Γ∫ = E ⋅ˆ t 1dl
γ 1
∫ − E ⋅ˆ t 2dlγ 2
∫ = v1 − v2 . (2.55)
Applicando la legge (2.44) dalla (2.55) si ha che
v2 −v1 =
dΦΓ
dt. (2.56)
In generale, quindi, i valori delle tensioni del campo elettrico lungo due curve che hanno gli stessi estremi sono diversi, v2 ≠ v1 . Quando le grandezze sono costanti nel tempo (condizione stazionaria) si ha che
v1 = v2 . (2.57) In condizioni stazionarie la tensione elettrica dipende solo dai due punti estremi della curva lungo cui è definita e non dalla sua particolare forma.
La tensione elettrica lungo una generica linea chiusa
EΓ = E ⋅ˆ t dl
Γ∫ , (2.58)
la si indica con EΓ e viene comunemente chiamata “forza elettromotrice” (f.e.m.) agente lungo la linea Γ . Si fa notare che il termine “forza” è improprio dato che le forze e le tensioni hanno dimensioni fisiche diverse. Utilizzando la f.e.m. EΓ la legge di Faraday-Neumann può essere così espressa,

20
EΓ = −
dΦΓ
dt. (2.59)
La (2.59) esprime il fatto che la f.e.m. agente lungo una linea chiusa è pari (a meno del segno) alla derivata rispetto al tempo del flusso magnetico concatenato con la linea stessa. Il fenomeno prende il nome di induzione elettromagnetica e la f.e.m. EΓ viene indicata come f.e.m. indotta dalla variazione del campo magnetico nel tempo.
Osservazione
Poiché la superficie S è invariabile (temporalmente), le operazioni di derivazione rispetto al tempo e integrazione sulla superficie sono tra loro indipendenti, e pertanto l’ordine con cui sono eseguite nella (2.44) può essere invertito. Essendo il campo magnetico funzione del punto e del tempo si ha che
ddt
B ⋅ ˆ n dSS∫∫ =
∂ B∂ t
⋅ ˆ n dSS∫∫ , (2.60)
e quindi
E ⋅ˆ t dl
Γ∫ = −
∂ B∂ t
⋅ ˆ n dSS∫∫ . (2.61)
E’ possibile dimostrare che l’equazione (2.61) vale anche per linee chiuse Γ e superfici S
variabili nel tempo,
E ⋅ˆ t dl
Γ t( )∫ = −
∂ B∂ t
⋅ ˆ n dSS t( )∫∫ . (2.62)
L’equazione (2.44) va solo se Γ , e quindi S , sono invariabili nel tempo. Infatti, dalla (2.62) si ottiene la (2.44) solo se Γ e S sono invariabili.
♦ Legge di Ampere-Maxwell La legge di Ampere-Maxwell governa la circuitazione del campo magnetico lungo una
generica linea (chiusa) Γ . Si ha che
Bµ 0
⋅ˆ t dlΓ∫ = J +
∂∂t
ε0E( )
⋅ ˆ n dS
S∫∫ , (2.63)
ovvero
Bµ 0
⋅ˆ t dlΓ∫ = iS t( )+
∂∂t
ε0E( )⋅ ˆ n dSS∫∫ , (2.64)
dove S è una generica superficie aperta che ha come orlo la linea chiusa Γ (Figura 2.13), e ˆ n è il versore normale alla superficie orientato concordemente con il verso di percorrenza scelto per
21
Γ secondo la regola della “mano destra”, iS è l’intensità di corrente elettrica che attraversa la superficie S e
µ0 = 4π ×10−7 H/m (2.65) è la permeabilità magnetica del vuoto. L’“henry” (H) è l’unità di misura del coefficiente di autoinduzione nel Sistema Internazionale. Si noti che nel Sistema SI, indicata con c ≅ 2.9979 ×108 m/s la velocità della luce nel vuoto, risulta c 2 =1/ε0µ0.
Si noti che la (2.63), ovvero la (2.64), sono valide anche quando sono presenti correnti puntiformi, correnti filiformi e distribuzioni di corrente con densità superficiale: alla intensità di corrente iS contribuiscono sia la distribuzione di densità di corrente volumetrica che le distribuzioni singolari. In condizioni stazionarie la (2.64) diventa
B ⋅ˆ t dl
Γ∫ = µ 0IΓ , (2.66)
dove IΓ è l’intensità di corrente concatenata con la linea chiusa Γ . In condizioni stazionarie il campo di densità di corrente è conservativo rispetto al flusso, quindi il flusso attraverso una generica superficie aperta dipende solo dal bordo della superficie. Per tale ragione in condizioni stazionarie ha senso parlare di “intensità di corrente elettrica concatenata” con la linea chiusa Γ . L’equazione (2.66) è la legge di Ampere in forma integrale.
Osservazione
La grandezza ε0E è il campo di spostamento elettrico per il vuoto e ∂ ε0E( )/∂t è il cosiddetto campo di densità di corrente di spostamento per il vuoto. Dunque, la “sorgente” per la circuitazione del campo magnetico lungo una generica linea chiusa Γ è la somma di due termini: i) l’intensità di corrente elettrica attraverso una generica superficie S che ha come orlo la linea Γ ; ii) l’intensità di corrente di spostamento attraverso la stessa superficie S . E’ evidente, allora, che il flusso del campo di densità di corrente totale
K ≡ J +∂∂t
ε0E( ) (2.67)
attraverso la superficie aperta S dipende solo dall’orlo Γ della superficie e non dalla sua particolare forma. Questo implica che il campo di densità di corrente K è necessariamente conservativo rispetto al flusso, cioè per ogni superficie chiusa Σ deve essere
K
Σ∫∫ ⋅ˆ n dS = 0. (2.67)
Questa equazione può essere ottenuta facilmente combinando la legge della conservazione della carica (2.17) e la legge di Gauss (2.36) assumendo che le superfici e le regioni volumetriche siano invariabili nel tempo. Lasciamo al lettore la verifica.
In condizioni stazionarie la circuitazione del campo magnetico lungo una generica linea chiusa Γ è uguale, a meno del fattore µ0 , all’intensità di corrente elettrica che attraversa una generica superficie S che ha come orlo la linea Γ (legge di Ampere). Ciò concorda con il fatto che in condizioni stazionarie il campo di densità di corrente elettrica è conservativo rispetto al flusso.

22
♦
Osservazione L’equazione (2.63) vale anche quando la superficie S e, quindi, la curva Γ variano nel tempo. Se la superficie S è invariabile nel tempo si ha
Bµ 0
⋅ˆ t dlΓ∫ = J ⋅ ˆ n dS +
ddt
ε0E( )⋅ ˆ n dSS∫∫
S∫∫ . (2.68)
♦
Tabella I: Equazioni di Maxwell nel vuoto e legge della conservazione della carica in forma
integrale
E ⋅ ˆ n dS =
1ε0
ρdVΩ
∫∫∫Σ∫∫
E ⋅ˆ t dl
Γ t( )∫ = −
∂B∂t
⋅ ˆ n dSS t( )∫∫
B ⋅ ˆ n dS = 0
Σ∫∫
B ⋅ˆ t dl
Γ∫ = µ 0 J + ε0
∂E∂t
⋅ ˆ n dS
S∫∫
J ⋅ ˆ n dS
Σ t( )∫∫ = −
∂ρ∂t
dVΩ t( )∫∫∫
2.6 Le equazioni di Maxwell nel vuoto in forma locale
Anche se il campo elettromagnetico è generato dalle cariche e dalle correnti secondo formule estremamente complesse, esso ha una caratteristica fondamentale: le relazioni tra i valori dei campi in un generico punto P e i valori in un intorno di P sono estremamente semplici.
Si assuma che, oltre alla distribuzione volumetrica di cariche e di correnti, vi siano anche distribuzioni superficiali di cariche σ e di correnti JS . I campi E , B , analogamente a quanto abbiamo già visto per il campo J , non sono continui in corrispondenza delle distribuzioni superficiali, come poi vedremo. In generale, quindi, bisogna distinguere le regioni in cui i campi sono continui dalle regioni in cui non lo sono.
2.6. 1 Forma locale nelle regioni in cui i campi sono regolari
Consideriamo dapprima le regioni in cui sono assenti distribuzioni di carica e di correnti
singolari. Come poi vedremo, in queste regioni i campi E e B sono ovunque continui. Legge di Gauss in forma locale La legge di Gauss in forma integrale (2.36) deve essere verificata per ogni superficie chiusa
Σ . E’ evidente che possiamo procedere in modo analogo a come abbiamo proceduto con la legge della conservazione della carica, § 2.4.2. Siccome una qualsiasi regione finita dello spazio può essere sempre decomposta in regioni elementari, è sufficiente imporre che la (2.36) sia verificata
23
per la superficie chiusa ∆Σ che delimita la generica regione di spazio elementare dΩ centrata nel generico punto P , affinché sia verificata per una generica superficie chiusa, Figura 2.9. Allora, applicando la (2.36) alla regione elementare, si ottiene
E ⋅ ˆ n dS =
1ε0
ρdVdΩ∫∫∫
∆Σ∫∫ , (2.69)
dove ∆Σ è la superficie che racchiude dΩ. Essendo
ρdV
dΩ∫∫∫ = ρ P( )dΩ , (2.70)
e
E ⋅ ˆ n dS∆Σ∫∫
dΩ= ∇ P ⋅ E per dΩ → 0, (2.71)
dalla (2.69) si ha immediatamente che
∇ ⋅ E = −
1ε0
ρ. (2.72)
Questa è la legge di Gauss in forma locale nelle regioni in cui il campo elettrico è continuo. La continuità delle componenti del campo elettrico è necessaria, altrimenti perde di significato l’operazione di divergenza. Ricordiamo che l’operazione di divergenza coinvolge le derivate parziali delle componenti del campo rispetto alle coordinate (in un assegnato sistema di coordinate). Nelle regioni in cui è assente carica elettrica le densità di carica è zero e la divergenza del campo elettrico è zero, quindi in queste regioni il campo elettrico è solenoidale. Si noti che il fatto che il campo elettrico sia solenoidale in alcune regioni non implica affatto che esso sia conservativo rispetto al flusso. Affinché un campo sia conservativo rispetto al flusso deve essere solenoidale in tutto lo spazio.
Legge di Gauss per il campo magnetico in forma locale Possiamo ripetere il ragionamento appena svolto per la legge (2.36) applicandolo alla legge
(2.39). Nelle regioni in cui il campo magnetico è continuo otteniamo immediatamente che (lasciamo al lettore la dimostrazione)
∇ ⋅ B = 0. (2.73)
Il campo magnetico è un campo solenoidale ovunque nello spazio. Osservazione
Un campo conservativo rispetto al flusso è solenoidale ovunque nello spazio; un campo solenoidale ovunque nello spazio è conservativo rispetto al flusso. Ovviamente, se il campo è solenoidale solo in una parte dello spazio non è conservativo rispetto al flusso. ♦

24
Legge di Faraday-Neumann in forma locale Consideriamo, ora, la legge di Faraday-Neumann (2.44). Essa deve essere verificata per ogni
linea chiusa. Quindi, ripetendo il ragionamento svolto per la legge di Gauss, basta imporre la (2.44) per la linea chiusa ∆Γn invariabile nel tempo che orla la generica superficie aperta elementare dSn centrata in un generico punto P (Figura 2.15) affinché essa sia verificata per una generica linea chiusa. Si noti che una volta fissato il punto P in cui la superficie è centrata, la forma e la dimensione della superficie elementare non abbiamo ancora individuato unicamente tale superficie, bisogna assegnare anche la direzione e il verso della sua normale. Per questa ragione abbiamo utilizzato il pedice “ n” nel simbolo “ dSn” usato per indicare l’elemento di superficie.
Applichiamo la (2.44) alla superficie chiusa elementare dSn invariabile nel tempo,
E ⋅ˆ t dl
∆Γ n
∫ = −∂B∂t
⋅ ˆ n dSdS n
∫∫ . (2.74)
P
∆Γ
dS n
Figura 2.15
Essendo dSn una superficie elementare si ha 13
∂B∂t
⋅ ˆ n dSdS n
∫∫ =∂B∂t
⋅ ˆ n dSn . (2.75)
Allora dalla (2.74) si ottiene
E ⋅ˆ t dl
∆Γ n
∫ = −∂B∂t
⋅ ˆ n dSn , (2.76)
ovvero
1dSn
E ⋅ˆ t dl∆Γ n
∫ = −∂B∂t
⋅ ˆ n . (2.77)
Si consideri, ora, il rapporto
E ⋅ˆ t dl∆Γ n
∫dSn
, (2.78)
che compare a sinistra dell’equazione (2.77). Pur essendo ∆Γn la l’orlo di una superficie elementare, per calcolare la circuitazione che compare al numeratore della (2.78) non si può ragionare così come è stato fatto per l’integrale di superficie che compare nella (2.75): pur
13 Per definizione di superficie elementare ∂B /∂t( )⋅ ˆ n è sostanzialmente uniformi su dSn .

25
essendo E con buona approssimazione uniforme sulla superficie dSn e, quindi, con buona approssimazione uniforme anche la linea chiusa ∆Γn , E ⋅ ˆ t non è affatto uniforme lungo ∆Γn .
E’ evidente che l’integrale E ⋅ ˆ t dl∆Γn
∫ tende a zero per dSn tendente a zero, quindi la (2.78) è il
rapporto tra due infinitesimi. Si può dimostrare che il rapporto (2.78), così come il rapporto (2.24) è finito ed è indipendente sia dalla forma della superficie elementare dSn e, quindi, dalla forma della curva ∆Γn , che dal valore dell’area dSn : esso dipende solo dal comportamento del campo vettoriale E nell’intorno del punto P . Indichiamo tale limite con Rn , dunque
lim
dS n → 0
E ⋅ˆ t dl∆Γ n
∫dSn
= Rn per dSn → 0. (2.79)
Ricordiamo che il pedice “n” ricorda che il limite per dSn → 0 deve essere effettuato mantenendo fissata la direzione della normale ˆ n .
Immaginiamo ora di ripetere lo stesso ragionamento per una superficie elementare centrata nello stesso punto P , che ha la stessa forma ma è dotata di una diversa normale ˆ ′ n diversa da ˆ n . Se anche questo nuovo limite esiste ed è finito, indipendentemente dalla forma di dS ′ n , poniamo ancora
E ⋅ˆ t dl∆Γ ′ n
∫dS ′ n
= R ′ n per dS ′ n → 0. (2.80)
E’ possibile dimostrare che i valori di Rn , al variare di ˆ n , corrispondono alle componenti, secondo la direzione ˆ n , di un vettore univocamente determinato. Esso prende il nome di rotore del campo elettrico nel punto P e si indica il simbolo ∇ × E 14. Riassumendo, il rotore di E nel punto P è il vettore la cui componente in una generica direzione orientata ˆ n è data dalla
∇ ×E( )⋅ ˆ n =
E ⋅ˆ t dl∆Γ n
∫dSn
per dSn → 0. (2.81)
Dunque, il rotore di un campo vettoriale in un generico punto P non è altro che un altro vettore la cui componente lungo una direzione orientata ˆ n assegnata è il rapporto tra la circuitazione lungo il bordo di una superficie elementare centrata nel punto P con normale ˆ n e l’area di tale superficie; il bordo della superficie elementare è orientato concordemente con il versore ˆ n secondo la regola della “mano destra”. E’ interessante osservare che per determinare il rapporto (2.81) e, quindi, il rotore di E , non è necessario calcolare la circuitazione di E lungo il bordo di una superficie elementare. Quando il campo vettoriale E è espresso attraverso le componenti cartesiane Ex = Ex x,y,z;t( ), Ey = Ey x,y,z;t( ), Ez = Ez x,y,z;t( ), il calcolo del rotore è particolarmente semplice. Si ha, infatti
∇ ×E =
∂Ey
∂z−
∂Ez
∂y
x + ∂Ez
∂x−
∂Ex
∂z
y + ∂Ex
∂y−
∂Ey
∂x
z ; (2.82)
14 Il concetto di rotore di un campo vettoriale è generale, non dipende dalla particolare natura fisica del campo vettoriale in esame. Per la sua applicabilità è richiesto solo che il campo vettoriale sia continuo.

26
ˆ x , ˆ y e ˆ z sono i tre versori fondamentali del sistema di coordinate cartesiane impiegato. Il calcolo del rotore risulta essere semplice anche quando il campo vettoriale è espresso attraverso altri tipi di componenti, ad esempio, componenti cilindriche e sferiche. In questi casi l’espressione della divergenza risulta essere un po’ più complessa di quella descritta dalla (2.81) (vedi in Appendice 1). E’ evidente che l’espressione (2.81) e, quindi, l’operatore di rotore ha significato solo se tutte le componenti del campo elettrico sono continue.
Sostituendo la (2.81) nella (2.77) si ha che in ogni punto P e per ogni t
∇ ×E +
∂B∂t
⋅ ˆ n = 0 . (2.83)
Siccome la (2.83) è verificata per ogni ˆ n deve essere necessariamente
∇ × E = −∂B∂t
. (2.84) Questa è la legge di Faraday-Neumann in forma locale nelle regioni in cui il campo elettrico è continuo.
Quale è il significato fisico della (2.84)? Per definizione di rotore ∇ ×E( )⋅ ˆ n dS rappresenta proprio la circuitazione di E lungo il bordo della superficie elementare aperta dS di normale ˆ n . Se moltiplichiamo scalarmente ambo i membri della (2.84) per ˆ n dS si ottiene proprio la legge di Faraday-Neumann applicata al contorno della superficie elementare dS .
Osservazione In condizioni stazionarie il rotore del campo elettrico è ovunque uguale a zero. Un campo vettoriale con rotore uguale a zero in una certa regione di spazio si dice che è
irrotazionale in quella regione. Un campo conservativo rispetto alla circuitazione è irrotazionale in tutto lo spazio. Viceversa, un campo irrotazionale in ogni punto dello spazio è conservativo rispetto alla circuitazione. Un campo irrotazionale solo in una regione finita di spazio non è conservativo rispetto alla circuitazione.
♦
Legge Ampere-Maxwell in forma locale
Consideriamo, ora, la legge di Ampere-Maxwell (2.63). Essa deve essere verificata per ogni
linea chiusa. Quindi, ripetendo il ragionamento appena svolto per la legge Faraday-Neumann si ha
∇ × B = µ0 J +∂∂t
ε0E( )
. (2.85)
Questa è la legge di Ampere-Maxwell in forma locale nelle regioni in cui il campo magnetico è continuo.
Quale è il significato fisico della (2.85)? Per definizione di rotore, ∇ ×B( )⋅ ˆ n dS rappresenta proprio la circuitazione di B lungo il bordo della superficie elementare aperta dS di normale ˆ n . Se moltiplichiamo scalarmente ambo i membri della (2.85) per ˆ n dS si ottiene proprio la legge di Ampere-Maxwell applicata al contorno della superficie elementare dS . In condizioni stazionarie la (2.85) diventa
∇ × B = µ0J . (2.86)

27
Questa è la legge di Ampere in forma locale nelle regioni in cui il campo magnetico è continuo.
2.6.2 Forma locale in corrispondenza di distribuzioni con densità superficiale
Ora analizzeremo cosa accade in corrispondenza di distribuzioni di carica e di corrente con densità superficiali.
Legge di Gauss L’equazione (2.72) vale solo nelle regioni in cui il campo elettrico è continuo. In presenza di
una distribuzione di carica con densità superficiale la componente normale del campo elettrico è discontinua.
Sσ
P
n1
2
Figura 2.16
Si assuma che su una superficie Sσ sia definita una densità di carica superficiale σ . Si imponga la legge di Gauss per una superficie elementare di tipo “M”, vedi la Figura 2.10. Ragionando come per la conservazione della carica, § 2.2.4, si ottiene
E1 − E2( )⋅ ˆ n = σε0
, (2.87)
dove ˆ n è la normale alla superficie Sσ orientata in modo tale che va dalla parte “2” verso la parte “1”, Figura 2.16. Indicando con En1 = E1 ⋅ ˆ n e En 2 = E2 ⋅ ˆ n le componenti di E 1 e E 2 lungo la normale ˆ n , la (2.87) può essere anche scritta in questo modo,
En1 − En 2 =σε0
. (2.88)
Questo risultato costituisce un nuovo enunciato, in forma locale, della legge di Gauss in corrispondenza di distribuzioni di cariche con densità superficiale e afferma: Nei punti del campo elettrico in cui sia presente una carica distribuita con densità superficiale σ , il campo elettrico presenta una discontinuità nella componente normale alla superficie su cui è distribuita la carica; la differenza tra i valori della componente normale di E , considerati dall’uno e dall’altro lato di questa superficie, è uguale, a meno del fattore 1/ε0 , σ nel punto considerato. Nelle regioni prive di cariche superficiali la componente normale di E è continua. E’ appena il caso di notare che, a causa della discontinuità, la divergenza del campo E non è definita in corrispondenza dei punti di Sσ .

28
Legge di Gauss per il campo magnetico L’equazione (2.73) vale solo nelle regioni in cui il campo magnetico è continuo. Ora faremo
vedere che la componente normale del campo magnetico a una generica superficie è sempre continua.
P
n1
2S
Figura 2.17
Sia S una generica superficie. Si imponga la legge di Gauss per il campo magnetico (2.39) ad una superficie elementare di tipo “M”, vedi la Figura 2.10. Ragionando come per la legge di Gauss per il campo elettrico, si ottiene immediatamente
B1 − B2( )⋅ ˆ n = 0 , (2.89) dove ˆ n è la normale alla superficie S , Figura 2.17. Indicando con Bn1 = B1 ⋅ ˆ n e Bn2 = B 2 ⋅ ˆ n le componenti di B 1 e B 2 lungo la normale ˆ n la (2.89) può essere anche scritta in questo modo,
Bn1 = Bn 2 . (2.90) Questo risultato costituisce un nuovo enunciato, in forma locale, della legge di Gauss per il campo magnetico in corrispondenza di una generica superficie e afferma: La componente normale del campo magnetico è continua in corrispondenza di qualsiasi superficie.
Legge di Faraday-Neumann
La legge (2.84) vale solo nei punti in cui il campo elettrico è continuo. Ora faremo vedere che la componente tangente del campo elettrico a una generica superficie è sempre continua.
Consideriamo una generica superficie S e una linea rettangolare elementare ∆Γ orientata (ad esempio, in verso orario), come del tipo indicato in Figura 2.18a, centrata nel generico punto P , tale che l’altezza dh sia trascurabile rispetto alla lunghezza dl delle basi15; indichiamo con dl1 e dl2 i tratti elementari di base e con dh1 e dh2 i tratti elementari di altezza. D’ora in poi, chiameremo queste curve “linee T”. Indichiamo con dS la superficie piana elementare che ha come orlo la linea ∆Γ , orientata concordemente con il verso di percorrenza di ∆Γ secondo la regola della mano destra.
Applichiamo alla linea a “T” la legge di Faraday-Neumann,
E ⋅ˆ t dl
∆Γ∫ = −
dΦ∆Γ
dt, (2.91)
dove Φ∆Γ è il flusso del campo magnetico concatenato con la curva ∆Γ . Per Φ∆Γ si ha
15 L’altezza è un infinitesimo di ordine superiore rispetto alla lunghezza.

29
Φ∆Γ = B⋅ ˆ m dS
dS∫∫ = B P;t( )⋅ ˆ m P( )dS (2.92)
perché dS è una superficie elementare. Applicando la proprietà di additività dell’integrale di linea si ha
E⋅ t dl
∆Γ∫ = E⋅ t dl
dl1
∫ + E⋅ˆ t dldh 1
∫ + E⋅ t dldl2
∫ + E⋅ t dldh 2
∫ . (2.93)
Essendo, per ipotesi, dl1 e dl2 tratti elementari di lunghezza dl, si ha che
E ⋅ˆ t dl
l1
∫ = E1 ⋅ˆ t 1dl e
E ⋅ˆ t dll2
∫ = E 2 ⋅ˆ t 2dl , (2.94)
dove ˆ t 1 e ˆ t 2 sono, rispettivamente, i versori tangenti i tratti elementari dl1 e dl2 , avendo
indicato con E1 e E 2 i valori del campo elettrico lungo le due basi elementari. Essendo l’altezza del rettangolo un infinitesimo, E1 e E 2 sono, rispettivamente, i valori del campo elettrico in corrispondenza del punto P , dall’uno e dall’altro lato della superficie S .
(a) (b)
m
P
n1
2
t
S
S
Pdl1dl2
dh2
t 1
t 2
t
dh1
∆Γ
dS
m
n
Figura 2.18 Linee di tipo “T”.
Trascurando il contributo dell’integrale di linea lungo le due altezze
E ⋅ˆ t dl
h1∫ + E ⋅ˆ t dl
h 2∫ perché
per ipotesi infinitesimi di ordine superiore rispetto agli altri due termini, combinando le (2.93) e (2.94) si ottiene
E ⋅ˆ t dl
∆Γ∫ = E1 ⋅ˆ t 1 + E 2 ⋅ˆ t 2( )dl. (2.95)
Sostituendo le (2.92) e (2.95) nella (2.91) si ottiene
E1⋅ˆ t 1 + E2 ⋅ t 2( )dl = −
∂∂ t
B⋅ ˆ m ( )dS . (2.96)
Essendo dS = dl ⋅ dh , dalla (2.96) si ottiene

30
E1⋅ t 1 + E 2⋅ˆ t 2 = −
∂∂ t
B⋅ ˆ m ( )dh . (2.97)
E’ evidente allora che, essendo dh un infinitesimo (nel limite di dh → 0 la linea ∆Γ viene schiacciata in modo da far tendere a zero i lati corti) e il modulo della derivata parziale di B rispetto al tempo finito risulta dh ∂ B⋅ ˆ m ( )/ ∂ t[ ]→0, quindi:
E1 ⋅ ˆ t 1 + E 2 ⋅ ˆ t 2 = 0. (2.98) La (2.98) può essere così riscritta
ˆ t ⋅ E1 −E 2( ) = 0, (2.99) dove ˆ t è la tangente alla superficie S nel punto P orientata concordemente con il versore ˆ t 1, Figura 2.18b. Indicando con Et1 = E1 ⋅ ˆ t e Et 2 = E2 ⋅ ˆ t le componenti di E 1 e E 2 lungo la tangente ˆ t , la (2.97) può essere anche scritta in questo modo,
Et1 = Et 2 . (2.100) Riassumendo, possiamo affermare che in corrispondenza dei punti di una generica superficie le componenti del campo elettrico tangenziali ad essa si mantengono continue nel passaggio da un lato all’altro della superficie stessa (anche in corrispondenza di distribuzioni con densità superficiali).
Questo risultato costituisce un nuovo enunciato, in forma locale, della legge di Faraday-Neumann in corrispondenza di una generica superficie e afferma: La componente tangenziale del campo elettrico a qualsiasi superficie è continua.
Osservazione Sia ˆ n il versore normale alla superficie S nel punto P orientato in modo tale ˆ n = ˆ t × ˆ m, Figura 2.18. E’ evidente, allora, che
ˆ t = ˆ m × ˆ n . (2.101) Sostituendo la (2.101) nella (2.99) si ha
ˆ m × ˆ n ( )⋅ E1 − E2( )= 0 (2.102) Essendo per una nota identità vettoriale 16 ˆ m × ˆ n ( )⋅ E1 − E2( )= ˆ m ⋅ ˆ n × E1 −E 2( )[ ], la (2.102) diventa
ˆ m ⋅ ˆ n × E1 − E2( )[ ]= 0 . (2.103) Siccome la (2.99) deve essere verificata per ogni versore tangente ˆ t , la relazione (2.103) deve essere verificata per qualsiasi versore ˆ m . Ciò è possibile se e solo se
16 A× B ⋅C = A ⋅ B × C.

31
ˆ n × E1 − E2( )= 0 . (2.104)
L’utilità della forma (2.104) è nel fatto che si fa di nuovo riferimento al versore normale alla superficie, così come nei casi precedenti. Premoltiplicando vettorialmente il campo E1 per ˆ n si ottiene la componente tangente di E1 ruotata di 90 gradi in senso antiorario attorno alla normale; analogamente per il campo E 2 . Allora, la (2.101) dice che la componente tangente di E1 ruotata di 90 gradi in verso antiorario attorno alla normale è uguale alla componente tangente di E 2 ruotata sempre di 90 gradi in verso antiorario attorno alla normale. Di conseguenza, le componenti tangenti di E1 e E 2 devono essere uguali.
♦
Legge di Ampere-Maxwell
La legge (2.85) vale solo nei punti in cui il campo magnetico è continuo. Ora determineremo la legge che governa la componente tangenziale del campo magnetico in prossimità di una distribuzione di densità superficiale di corrente.
(a) (b)
dS
P
dl1dl2
dh2
t 1
t 2t
dh1
∆Γ m
JS
Sσ
n
m
P
n1
2
t
S
Figura 2.19 Linee di tipo “T”.
Sulla superficie Sσ è definita una distribuzione di densità superficiale di corrente JS . Come
nel caso appena trattato, consideriamo sulla superficie Sσ una linea di tipo “T” centrata nel generico punto P, Figura 2.19. Applichiamo alla linea di tipo “T” la legge di Ampere-Maxwell,
B⋅ t dl
∆Γ∫ = µ 0 idS + µ 0ε0
dφdS
dt, (2.105)
dove φdS è il flusso del campo elettrico attraverso la superficie elementare dS . Per φdS si ha
φdS = E⋅ ˆ m dS
dS∫∫ = E P;t( )⋅ ˆ m P( )dS , (2.106)
perché dS è una superficie elementare. Solo il campo di densità di corrente superficiale contribuisce all’intensità di corrente idS : idS è il flusso di JS attraverso la curva di lunghezza dl che si ottiene dall’intersezione della superficie elementare dS con la superficie Sσ , orientata con normale ˆ m . E’ immediato, allora, che

32
idS = JS P;t( )⋅ ˆ m P( )dl . (2.107)
Ragionando come nel caso precedente si ha, inoltre,
B⋅ t dl
∆Γ∫ = B1⋅ t 1 + B 2⋅ˆ t 2( )dl . (2.108)
I contributi dei lati dh1 e dh1 sono trascurabili perché infinitesimi di ordine superiore. Sostituendo le (2.106) – (2.108) nella (2.105) e ricordando che dS = dh ⋅ dl si ottiene
B1 ⋅ˆ t 1 + B2 ⋅ˆ t 2 = µ 0 J S + dhE( )⋅ ˆ m . (2.109) E’ evidente allora che dhE , in modulo, è infinitesimo rispetto a JS e quindi, dhE è trascurabile rispetto a JS . Allora dalla (2.108) si ottiene:
B1 ⋅ˆ t 1 + B2 ⋅ˆ t 2 = µ 0JS ⋅ ˆ m . (2.110) La (2.110) può essere così riscritta
ˆ t ⋅ B1 −B 2( ) =µ 0JS ⋅ ˆ m , (2.111) dove ˆ t è la tangente alla superficie Sσ nel punto P orientata concordemente con il versore ˆ t 1, Figura 2.19. Indicando con Bt1 = B1 ⋅ ˆ t e Bt2 = B 2 ⋅ ˆ t le componenti di B 1 e B 2 lungo la tangente ˆ t , la (2.111) può essere anche riscritta in questo modo,
Bt1 − Bt 2 = µ0J S ⋅ ˆ m . (2.112)
Questo risultato costituisce un nuovo enunciato, in forma locale, della legge di Ampere-Maxwell in corrispondenza di una superficie Sσ su cui è definita una distribuzione con densità superficiale di corrente JS e afferma: La variazione nel passaggio dall’una all’altra faccia di Sσ della componente di B secondo una generica direzione tangente a Sσ è uguale, a meno del fattore µ0 , alla componente di JS lungo la direzione ortogonale alla direzione tangente considerata. Nelle regioni prive di distribuzioni con densità superficiale la componente tangenziale del campo magnetico ad una generica superficie è continua.
Osservazione La condizione (2.111) può essere riscritta nel modo equivalente,
ˆ n × B1 − B2( )= µ0J S . (2.113) Infatti, essendo ˆ t = ˆ m × ˆ n (vedi (2.101)), dalla (2.111) si ottiene
ˆ m × ˆ n ( )⋅ B1 − B2( )= µ0J S ⋅ ˆ m . (2.114)

33
Utilizzando l’identità ˆ m × ˆ n ( )⋅ B1 − B2( )= ˆ m ⋅ ˆ n × B1 −B 2( )[ ], la (2.111) diventa
ˆ m ⋅ ˆ n × B1 − B2( )[ ]= µ0J S ⋅ ˆ m . (2.115) Siccome la (2.111) deve essere verificata per ogni versore tangente ˆ t , la relazione (2.115) deve essere verificata per qualsiasi versore ˆ m . Ciò è possibile se e solo se è verificata la (2.113).
Allora, la (2.113) dice che la differenza tra la componente tangente di B1 ruotata di 90 gradi in verso antiorario attorno alla normale nel generico punto P di Sσ e la componente tangente di B 2 ruotata sempre di 90 gradi in verso antiorario attorno alla normale nello stesso punto è uguale, a meno del fattore µ0 , al valore del campo di densità di corrente superficiale in quel punto.
♦
Tabella II: Equazioni di Maxwell nel vuoto e legge della conservazione della carica in forma
locale
Regioni in cui i campi sono continui
Superfici su cui sono definite distribuzioni con densità superficiale
1
2
n
S ∇ ⋅ E = −
ρε0
ˆ n ⋅ E1 − E2( )=σε0
∇ × E = −∂B∂t
ˆ n × E1 − E2( )= 0
∇ ⋅ B = 0 ˆ n ⋅ B1 − B2( )= 0
∇ × B = µ0 J +∂∂t
ε0E( )
ˆ n × B1 − B2( )= µ0J S
∇ ⋅ J = −∂ρ∂t
ˆ n ⋅ J1 − J2( )= −∂σ∂t
2.7 Materiali conduttori, dielettrici e magnetici Le equazioni che esprimono le leggi generali dell’elettromagnetismo assumono una forma più complessa in presenza di materiali (conduttori, isolanti, dielettrici, materiali “magnetici”, ecc), poiché le sorgenti del campo non si limitano più soltanto alle cariche e correnti elettriche presenti nello spazio vuoto (delle quali si assumono note a priori le distribuzioni), ma comprendono anche quelle che si generano nei mezzi materiali per effetto dell’interazione con il campo elettromagnetico ivi presente. Ne deriva che queste nuove distribuzioni svolgono allo stesso tempo il ruolo di sorgenti (e quindi - se si vuole - “cause”) del campo e quello di “effetto” (in quanto determinate dal campo stesso). Di qui, la maggiore complessità richiesta dalla descrizione dei fenomeni elettromagnetici in presenza di mezzi materiali. In realtà, come poi
34
vedremo, nella maggior parte dei casi tutte le sorgenti elementari del campo elettromagnetico sono situate all’intermo di materiali. Le cariche e le correnti elettriche presenti nei materiali, che contribuiscono al campo elettromagnetico macroscopico, sono classificate in “libere” e “legate” (o molecolari).
Con cariche elettriche libere si intendono quelle cariche che sono in grado di muoversi all’interno del materiale su lunghezze macroscopiche. Le correnti elettriche libere sono le correnti prodotte da cariche libere in moto. Ad esempio, in un filo di rame un elettrone per ogni nucleo di rame è libero di muoversi su lunghezze macroscopiche.
Con cariche elettriche legate si intendono, invece, quelle cariche che, pur contribuendo al campo elettromagnetico macroscopico, non sono libere di spostarsi su lunghezze macroscopiche, ma possono solo muoversi attorno a posizioni ben precise su dimensioni caratteristiche dell’ordine delle dimensioni molecolari o atomiche. Le correnti prodotte dal moto delle cariche legate prendono il nome di correnti elettriche legate (o molecolari).
Va detto con chiarezza che, ove mai fosse possibile conoscere a-priori la distribuzione delle sorgenti legate ai mezzi materiali presenti, oltre che di quelle libere, le leggi del campo elettromagnetico potrebbero ancora essere utilizzate nella forma relativa allo spazio vuoto (come se i mezzi materiali non esistessero), a patto, naturalmente, di fare figurare fra le sorgenti anche quelle legate (oltre che quelle libere). Analoga situazione si ha quando i mezzi materiali presenti siano completamente trasparenti al campo elettromagnetico: ciò si verifica quando nel mezzo materiale non vengono indotte sorgenti significative per effetto della presenza in esso del campo elettromagnetico (è il caso, ad esempio, dell’aria in condizioni usuali, nonché di altri gas).
Nelle situazioni più frequenti che si presentano nella tecnica, le cose stanno però, come si è detto, in modo più complicato, perché anche ammettendo di potere conoscere a priori la distribuzione di tutte le sorgenti libere - cosa del tutto ipotetica, perché, come poi vedremo, le cariche e le correnti elettriche libere sono anche esse (quasi sempre) incognite - non è nota a priori la distribuzione delle sorgenti legate perché non è noto il campo elettromagnetico complessivo: occorre, quindi, trovare il modo di riuscire a determinare insieme sia queste, sia il campo elettromagnetico che esse contribuiscono a produrre. I fenomeni che si manifestano nei materiali, quando sono immersi in un campo elettromagnetico, sono così classificabili: conduzione elettrica, polarizzazione elettrica e polarizzazione magnetica. Può riscontrarsi la presenza significativa di più d’uno di tali fenomeni, oppure la prevalenza di uno solo (ad esempio, in un pezzo di ferro sono significativi sia il fenomeno della conduzione che quello della polarizzazione magnetica, mentre in uno di rame è significativo soltanto quello della conduzione e in uno di plastica quello della polarizzazione elettrica). I conduttori sono i materiali in cui è prevalente il fenomeno della conduzione elettrica, i dielettrici sono i materiali in cui è prevalente la polarizzazione elettrica e i materiali magnetici sono quei materiali in cui sono prevalenti il fenomeno della polarizzazione magnetica.
2.6.1 Conduttori I conduttori sono materiali che contengono un numero elevato di cariche elettriche libere per
unità di volume; ad esempio, nel rame la densità numerica di elettroni liberi è dell’ordine di 1023cm−3 .
Il fenomeno della conduzione elettrica è l’azione del campo elettromagnetico sulle cariche elettriche libere presenti nei conduttori: esso è caratterizzato dalle distribuzioni di cariche e correnti (superficiali e volumetriche), risultanti dall’azione del campo elettromagnetico sulle cariche libere.
Il campo di densità di corrente in un conduttore, in un qualsiasi punto e istante, dipende, oltre che dal valore campo elettrico nello stesso punto e istante, anche dal campo magnetico (effetto Hall), dalla velocità del conduttore (come nelle dinamo e negli alternatori), e da campi di forze di

35
natura non elettrica (come, ad esempio, il campo elettromotore di natura chimica in una pila o in una cella a combustibile, o il campo elettromotore di natura fotoelettrica nelle celle solari).
Il tipo di corrente che nasce in un conduttore e il meccanismo di conduzione dipende dalla struttura fisico-chimica del materiale. La relazione tra il campo elettrico (la causa) e il campo densità di corrente nei conduttori (l’effetto) dipende, essenzialmente, solo dalla costituzione fisico-chimica del materiale conduttore (e non, ad esempio, dalla loro forma); per questa ragione le chiameremo relazioni costitutive del conduttore. Noi qui faremo riferimento solo ai cosiddetti conduttori metallici, perché sono i più comuni e anche i più semplici da descrivere.
Un conduttore metallico si può immaginare costituito da una struttura di cariche positive, fisse nei vertici di un reticolo 17, e da un “mare” di elettroni liberi che si muovono in maniera disordinata a causa dell’agitazione termica, urtando continuamente tra loro e contro le cariche positive fisse del reticolo. Sotto l’azione di un campo elettromagnetico macroscopico su ciascun elettrone libero del conduttore agisce una forza che dà origine ad un moto ordinato che si sovrappone al moto disordinato dovuto all’agitazione termica.
E’ possibile prevedere l’azione del campo elettromagnetico sulle cariche libere di un conduttore metallico studiando il moto degli elettroni liberi sotto l’azione della forza di Lorentz f = −e E + v ×B( ) ( v è la velocità media del generico elettrone libero) e degli urti anelastici con il reticolo del conduttore.
JB JEm
(a) (b) (c)
EJ
conduttore
Figura 2.20
Si consideri un conduttore metallico fermo, in presenza di un campo elettromagnetico (il
campo può variare anche nel tempo, purché non troppo velocemente), Figura 2.20a. Se la velocità macroscopica associata al moto ordinato prodotto dal campo elettrico è molto più piccola confrontata con la velocità associata al moto disordinato (la cosiddetta velocità termica, che ricordiamo, è dell’ordine di centinaia di km al secondo a temperatura ambiente), la relazione tra il campo di densità di corrente volumetrica J (che descrive la corrente macroscopica nel conduttore) e il campo elettrico E (che produce la corrente macroscopica) è
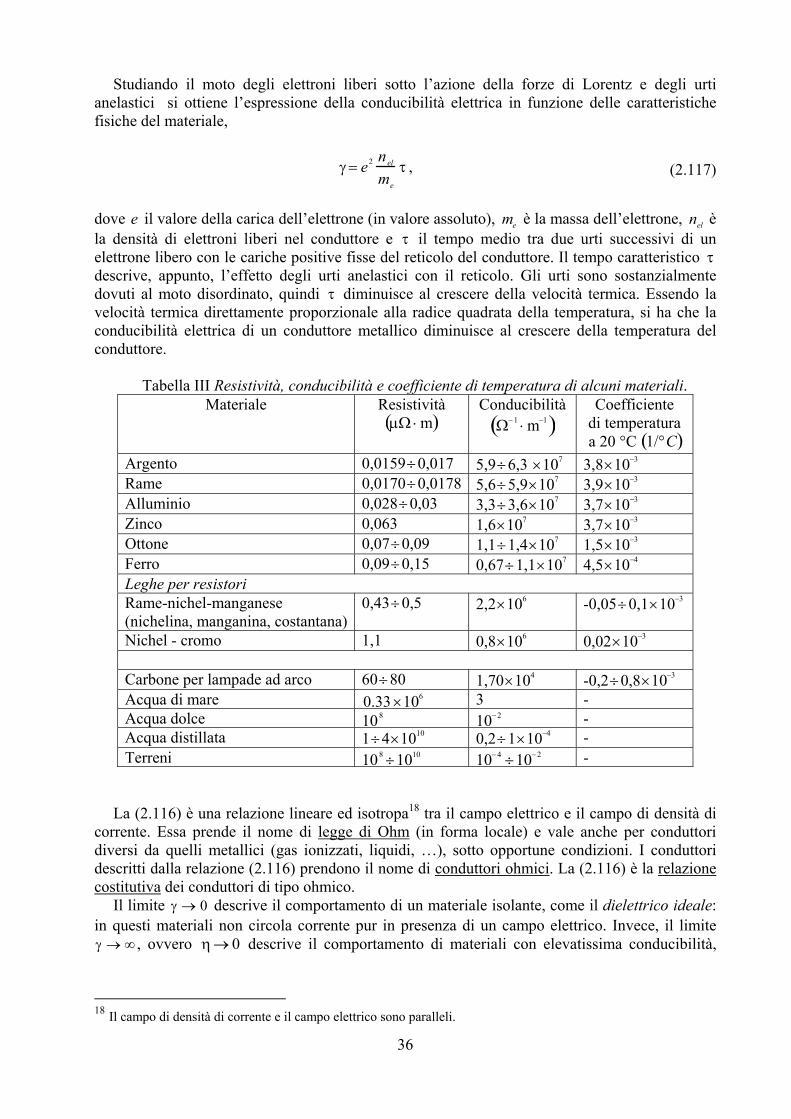
J = γE . (2.116) dove il coefficiente γ è la conducibilità elettrica del conduttore. Il termine di forza del campo magnetico è stato ignorato nella (2.116). Esso dà origine all’effetto Hall, effetto che è poco significativo nei metalli a causa delle basse velocità macroscopiche degli elettroni liberi.
L’inverso della conducibilità elettrica è la resistività elettrica η, η = 1/γ . E’ evidente che la dimensione fisica della resistività è V/ A( )⋅ m. Nel Sistema Internazionale 1V /1A =1Ω, dove “ohm” (Ω) è l’unità di misura della resistenza elettrica. Quindi l’unità di misura della resistività nel Sistema Internazionale è “ohm ⋅ metro” (Ω ⋅ m). Di conseguenza l’unità di misura della conducibilità elettrica è “1/ ohm⋅ metro( )” (Ω−1 ⋅ m−1). Nel Sistema Internazionale “1/ohm = siemens ” (Ω−1 =S): il “siemens” è l’unità di misura della conduttanza elettrica.
17 Ciascuna carica positiva è composta da un nucleo atomico e dagli elettroni legati al nucleo. La carica netta risultante è positiva perché mancano alla struttura atomica alcuni elettroni, che sono proprio quelli in grado di muoversi su dimensioni macroscopiche all’interno del reticolo.
36
Studiando il moto degli elettroni liberi sotto l’azione della forze di Lorentz e degli urti anelastici si ottiene l’espressione della conducibilità elettrica in funzione delle caratteristiche fisiche del materiale,
γ = e2 nel
me
τ , (2.117)
dove e il valore della carica dell’elettrone (in valore assoluto), me è la massa dell’elettrone, nel è la densità di elettroni liberi nel conduttore e τ il tempo medio tra due urti successivi di un elettrone libero con le cariche positive fisse del reticolo del conduttore. Il tempo caratteristico τ descrive, appunto, l’effetto degli urti anelastici con il reticolo. Gli urti sono sostanzialmente dovuti al moto disordinato, quindi τ diminuisce al crescere della velocità termica. Essendo la velocità termica direttamente proporzionale alla radice quadrata della temperatura, si ha che la conducibilità elettrica di un conduttore metallico diminuisce al crescere della temperatura del conduttore.
Tabella III Resistività, conducibilità e coefficiente di temperatura di alcuni materiali.
Materiale Resistività µΩ ⋅ m( )
Conducibilità Ω−1 ⋅ m−1( )
Coefficiente di temperatura a 20 °C 1/°C( )
Argento 0,0159÷0,017 5,9÷6,3 ×107 3,8×10−3 Rame 0,0170÷0,0178 5,6÷5,9×107 3,9×10−3 Alluminio 0,028÷0,03 3,3÷3,6×107 3,7×10−3 Zinco 0,063 1,6×107 3,7×10−3 Ottone 0,07÷0,09 1,1÷1,4×107 1,5×10−3 Ferro 0,09÷0,15 0,67÷1,1×107 4,5×10−4 Leghe per resistori Rame-nichel-manganese (nichelina, manganina, costantana)
0,43÷0,5 2,2×106 -0,05÷0,1×10−3
Nichel - cromo 1,1 0,8×106 0,02×10−3 Carbone per lampade ad arco 60÷80 1,70×104 -0,2÷0,8×10−3 Acqua di mare 0.33 ×106 3 - Acqua dolce 108 10−2 - Acqua distillata 1÷4×1010 0,2÷1×10−4 - Terreni 108 ÷1010 10−4 ÷10−2 -
La (2.116) è una relazione lineare ed isotropa18 tra il campo elettrico e il campo di densità di corrente. Essa prende il nome di legge di Ohm (in forma locale) e vale anche per conduttori diversi da quelli metallici (gas ionizzati, liquidi, …), sotto opportune condizioni. I conduttori descritti dalla relazione (2.116) prendono il nome di conduttori ohmici. La (2.116) è la relazione costitutiva dei conduttori di tipo ohmico.
Il limite γ → 0 descrive il comportamento di un materiale isolante, come il dielettrico ideale: in questi materiali non circola corrente pur in presenza di un campo elettrico. Invece, il limite γ → ∞ , ovvero η → 0 descrive il comportamento di materiali con elevatissima conducibilità,
18 Il campo di densità di corrente e il campo elettrico sono paralleli.
37
cioè il comportamento dei conduttori ideali: in questo caso pur in presenza di correnti nel conduttore il campo elettrico è nullo.
Si rileva sperimentalmente che, per un’ampia classe di conduttori e in un largo campo di temperature, la resistività varia pressoché linearmente, secondo la legge
η = η0 1+ α T − T0( )[ ], (2.118) dove T0 è la temperatura di riferimento, assunta pari a quell’ambiente T0 = 20°C , η0 è la resistività alla temperatura T0 e α è il cosiddetto coefficiente di temperatura del conduttore. La Tabella III riporta i valori tipici di η0 , γ0 e α .
Se il materiale conduttore è in moto con velocità V ed è immerso in un campo magnetico (Figura 2.20b), all’azione del campo elettrico bisogna aggiungere l’azione del campo V ×B : questo contributo è dovuto al termine della forza di Lorentz dipendente dal campo magnetico. In un conduttore in moto con velocità V , la velocità macroscopica del generico elettrone libero è data dalla somma della velocità dovuta all’azione della forza di Lorentz e della velocità di trascinamento V dovuta al moto del reticolo in cui l’elettrone, pur essendo libero, è obbligato a muoversi. Essendo la velocità dovuta all’azione della forza di Lorentz trascurabile (dell’ordine dei µm /s ), resta solo il contributo dovuto alla velocità di “trascinamento” V .
Nelle pile, nelle celle solari o nelle celle a combustibile, oltre al campo elettrico macroscopico, sulle cariche libere presenti nel materiale (che è ovviamente un materiale conduttore) agisce anche un campo, di natura diverso da quello elettrico macroscopico (ad esempio, di natura chimica nelle pile e nelle celle a combustibile, di natura fotovoltaica nelle celle solari), denominato campo elettromotore , che indichiamo con il simbolo Em, Figura 2.20c.
La relazione costitutiva di un conduttore ohmico in moto in un campo magnetico e in presenza di un campo elettromotore è, allora,
J = γ E + V ×B + Em( ) , (2.119) dove V e Em sono grandezze che possono essere considerate assegnate. Le “sorgenti” del campo elettromagnetico che noi siamo in grado di controllare effettivamente, ad esempio, attraverso “manopole” o “interruttori”, sono proprio i termini V ×B e Em che compaiono nella (2.119). Le sorgenti elementari del campo elettromagnetico, cioè le cariche e le correnti libere, sono esse stesse incognite del problema: esse non possono essere controllate in modo diretto. In conclusione la presenza di materiali conduttori non altera la struttura delle equazioni di Maxwell così come è stata descritta nel precedente paragrafo. In realtà, attraverso i conduttori è possibile produrre proprio le cariche e le correnti che compaiono come sorgenti elementari nelle equazioni di Maxwell, solo che queste cariche e queste correnti non sono note ma sono esse stesse incognite del problema. Le sole grandezze note sono, ad esempio, le velocità con cui ruotano i rotori nelle dinamo e negli alternatori e i campi elettromotori che agiscono nelle pile, nelle celle a combustibile o nelle celle solari.
2.6.2 Dielettrici
Gli atomi e le molecole di un dielettrico, pur essendo globalmente neutre, sono formate da portatori di cariche dei due segni, legate a posizioni di equilibrio da intense forze di richiamo che permettono loro solo piccoli spostamenti.
In un dielettrico ideale sono assenti cariche e correnti elettriche libere. Nei conduttori, le cariche elettriche libere possono compiere spostamenti macroscopici ed essere quindi separate macroscopicamente; nei dielettrici i portatori restano legati alle rispettive posizioni di equilibrio (a meno di piccoli spostamenti) e la separazione macroscopica è impossibile (a meno che non

38
siano presenti intensi campi elettrici in grado di rompere i forti legami tra i portatori di carica come, ad esempio, si verifica nelle scariche elettriche).
In condizioni di equilibrio, in assenza di cause che influiscano sulla distribuzione delle cariche macroscopiche, il campo elettrico macroscopico prodotto da un dielettrico è uguale a zero, poiché i contributi delle distribuzioni di carica opposte si bilanciano tra loro. Se il corpo viene immerso in un campo elettrico, i portatori positivi sono sollecitati da forze dirette nel senso del campo, quelli negativi da forze dirette in senso opposto. Gli spostamenti risultanti sono piccoli, dell’ordine delle dimensioni atomiche o molecolari, ma la distribuzione di carica viene alterata rispetto a quella di equilibrio, contribuendo così a modificare in modo apprezzabile il campo elettrico che l’ha generata. In queste condizioni, il dielettrico si dice polarizzato elettricamente. Tra gli aggregati di cariche elementari particolarmente importante è il dipolo elettrico costituito da due portatori di carica con carica elettrica, rispettivamente, +q e −q , posti a distanza h l’una dall’altra, Figura 2.21a. Diremo che il dipolo è elementare quando la distanza h è molto piccola, non solo in relazione alla scala macroscopica, ma anche rispetto alle distanze dagli altri dipoli.
+ q
− q
d pE
qE
−qE(a) (b) (c)
CE
C = 0
Figura 2.21 Dipolo elettrico
Un dipolo elettrico è caratterizzato dal suo momento: il vettore p di modulo qd , la cui
direzione coincide con quella del segmento di lunghezza d che congiunge le due cariche e il cui verso va dalla carica negativa alla carica positiva,
p = qd . (2.120) Nel Sistema Internazionale il momento di dipolo elettrico ha le dimensioni fisiche di “coulomb ⋅ metro ” (C ⋅ m).
Cosa accade a un dipolo elettrico elementare quando interagisce con un campo elettrico uniforme (Figura 2.21b) ? La risultante delle forze che agiscono sul dipolo elettrico è uguale a zero, perché la forza che agisce sulla carica positiva è uguale in modulo e ha verso opposto alla forza che agisce sulla carica negativa 19. Pur essendo il risultante del sistema di forze che agiscono sul dipolo uguale a zero, il momento di questo sistema di forze è diverso da zero, Figura 2.21b. La coppia del momento del sistema di forze che agiscono sul dipolo è data da
C = p ×E . (2.121) Dunque, il dipolo elettrico immerso in un campo elettrico uniforme non si sposta ma ruota, se libero da ulteriori vincoli, fino ad allinearsi con il campo elettrico: quando il momento di dipolo è allineato con il campo elettrico la coppia è uguale a zero, Figura 2.21c. Esistono due configurazioni di equilibrio con coppia nulla: una con p ed E equiversi (paralleli) e una con p ed E in verso opposto (antiparalleli). Solo la prima posizione di equilibrio è stabile: se infatti si 19 La forza risultante su un dipolo elettrico elementare in un campo elettrico non uniforme è diversa da zero: infatti, a causa della non uniformità del campo la forza che agisce sulla carica positiva è diversa sia in modulo che in direzione da quella che agisce sulla carica negativa.
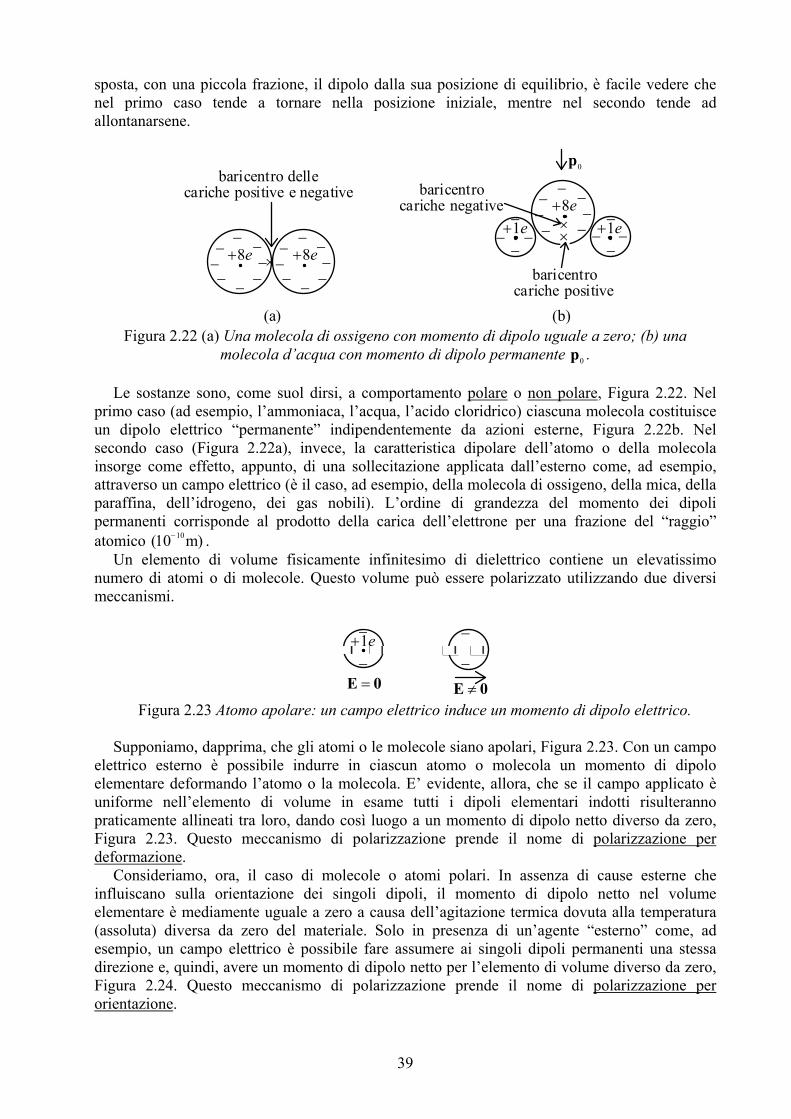
39
sposta, con una piccola frazione, il dipolo dalla sua posizione di equilibrio, è facile vedere che nel primo caso tende a tornare nella posizione iniziale, mentre nel secondo tende ad allontanarsene.
− −
−
−− −
− −+8e
− −−
−+1e − −−
−+1e××
baricentrocariche positive
baricentrocariche negative
p0
− −
−
−− −
− −+8e − −
−
−− −
− −+8e×
baricentro dellecariche positive e negative
(a) (b) Figura 2.22 (a) Una molecola di ossigeno con momento di dipolo uguale a zero; (b) una
molecola d’acqua con momento di dipolo permanente p0 .
Le sostanze sono, come suol dirsi, a comportamento polare o non polare, Figura 2.22. Nel primo caso (ad esempio, l’ammoniaca, l’acqua, l’acido cloridrico) ciascuna molecola costituisce un dipolo elettrico “permanente” indipendentemente da azioni esterne, Figura 2.22b. Nel secondo caso (Figura 2.22a), invece, la caratteristica dipolare dell’atomo o della molecola insorge come effetto, appunto, di una sollecitazione applicata dall’esterno come, ad esempio, attraverso un campo elettrico (è il caso, ad esempio, della molecola di ossigeno, della mica, della paraffina, dell’idrogeno, dei gas nobili). L’ordine di grandezza del momento dei dipoli permanenti corrisponde al prodotto della carica dell’elettrone per una frazione del “raggio” atomico (10−10m) .
Un elemento di volume fisicamente infinitesimo di dielettrico contiene un elevatissimo numero di atomi o di molecole. Questo volume può essere polarizzato utilizzando due diversi meccanismi.
−
−+1e
E = 0−
−
E ≠ 0 Figura 2.23 Atomo apolare: un campo elettrico induce un momento di dipolo elettrico.
Supponiamo, dapprima, che gli atomi o le molecole siano apolari, Figura 2.23. Con un campo
elettrico esterno è possibile indurre in ciascun atomo o molecola un momento di dipolo elementare deformando l’atomo o la molecola. E’ evidente, allora, che se il campo applicato è uniforme nell’elemento di volume in esame tutti i dipoli elementari indotti risulteranno praticamente allineati tra loro, dando così luogo a un momento di dipolo netto diverso da zero, Figura 2.23. Questo meccanismo di polarizzazione prende il nome di polarizzazione per deformazione.
Consideriamo, ora, il caso di molecole o atomi polari. In assenza di cause esterne che influiscano sulla orientazione dei singoli dipoli, il momento di dipolo netto nel volume elementare è mediamente uguale a zero a causa dell’agitazione termica dovuta alla temperatura (assoluta) diversa da zero del materiale. Solo in presenza di un’agente “esterno” come, ad esempio, un campo elettrico è possibile fare assumere ai singoli dipoli permanenti una stessa direzione e, quindi, avere un momento di dipolo netto per l’elemento di volume diverso da zero, Figura 2.24. Questo meccanismo di polarizzazione prende il nome di polarizzazione per orientazione.

40
E = 0 E ≠ 0
pi p
Figura 2.24
Si assuma che nell’elemento di volume siano presenti dN atomi o molecole con momenti di
dipolo p1,p2 ,...,pdN (Figura 2.25a) al generico istante t. Si definisce il valor medio del momento di dipolo nel punto P come
p =1
dNpi
i=1
dN
∑ . (2.122)
+ q
− qd
ppp1p2
(a) (b) (c) Figura 2.25
Il momento di dipolo medio è uguale a zero se i singoli dipoli, che si trovano nella regione elementare, sono orientati in modo casuale. Il modello macroscopico del fenomeno della polarizzazione di un dielettrico consiste nel rappresentare il dielettrico attraverso un continuo di dipoli elettrici elementari eguali, di momento p , Figura 2.25b, distribuiti con densità numerica
c =dNdV
. (2.123)
Posto
d =1q
p , (2.124)
il momento di dipolo medio p è il momento del dipolo elettrico equivalente composto dalle due cariche elettriche +q e −q , poste a distanza d lungo la retta orientata secondo la direzione e il verso di d , Figura 2.25c.
Il continuo di dipoli elementari con densità numerica c e momento elementare p può essere descritto attraverso il vettore di polarizzazione P (detto anche intensità di polarizzazione), definito come momento di dipolo elettrico per unità di volume. Si consideri una regione fisicamente infinitesima centrata nel punto P di volume dV . La polarizzazione nel punto P all’istante t è, per definizione, il rapporto tra il momento di dipolo risultante della regione elementare all’istante t e il volume dV ,
P =dNdV
p . (2.125)
ovvero
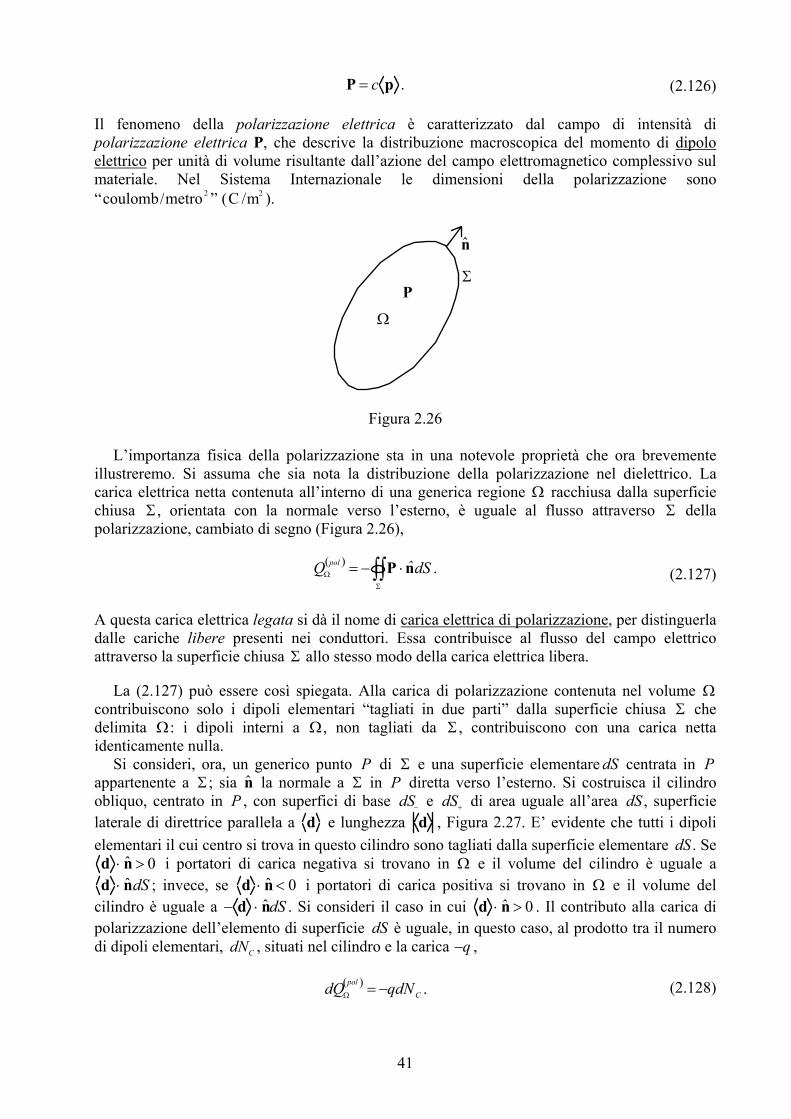
41
P = c p . (2.126) Il fenomeno della polarizzazione elettrica è caratterizzato dal campo di intensità di polarizzazione elettrica P, che descrive la distribuzione macroscopica del momento di dipolo elettrico per unità di volume risultante dall’azione del campo elettromagnetico complessivo sul materiale. Nel Sistema Internazionale le dimensioni della polarizzazione sono “coulomb/metro2 ” (C /m2 ).
n
Σ
Ω
P
Figura 2.26 L’importanza fisica della polarizzazione sta in una notevole proprietà che ora brevemente illustreremo. Si assuma che sia nota la distribuzione della polarizzazione nel dielettrico. La carica elettrica netta contenuta all’interno di una generica regione Ω racchiusa dalla superficie chiusa Σ, orientata con la normale verso l’esterno, è uguale al flusso attraverso Σ della polarizzazione, cambiato di segno (Figura 2.26),
QΩ
pol( ) = − P ⋅ ˆ n dSΣ∫∫ . (2.127)
A questa carica elettrica legata si dà il nome di carica elettrica di polarizzazione, per distinguerla dalle cariche libere presenti nei conduttori. Essa contribuisce al flusso del campo elettrico attraverso la superficie chiusa Σ allo stesso modo della carica elettrica libera.
La (2.127) può essere così spiegata. Alla carica di polarizzazione contenuta nel volume Ω contribuiscono solo i dipoli elementari “tagliati in due parti” dalla superficie chiusa Σ che delimita Ω: i dipoli interni a Ω, non tagliati da Σ , contribuiscono con una carica netta identicamente nulla.
Si consideri, ora, un generico punto P di Σ e una superficie elementare dS centrata in P appartenente a Σ; sia ˆ n la normale a Σ in P diretta verso l’esterno. Si costruisca il cilindro obliquo, centrato in P , con superfici di base dS− e dS+ di area uguale all’area dS , superficie laterale di direttrice parallela a d e lunghezza d , Figura 2.27. E’ evidente che tutti i dipoli elementari il cui centro si trova in questo cilindro sono tagliati dalla superficie elementare dS . Se d ⋅ ˆ n > 0 i portatori di carica negativa si trovano in Ω e il volume del cilindro è uguale a d ⋅ ˆ n dS ; invece, se d ⋅ ˆ n < 0 i portatori di carica positiva si trovano in Ω e il volume del
cilindro è uguale a − d ⋅ ˆ n dS . Si consideri il caso in cui d ⋅ ˆ n > 0 . Il contributo alla carica di polarizzazione dell’elemento di superficie dS è uguale, in questo caso, al prodotto tra il numero di dipoli elementari, dNC , situati nel cilindro e la carica −q ,
dQΩ
pol( ) = −qdNC . (2.128)
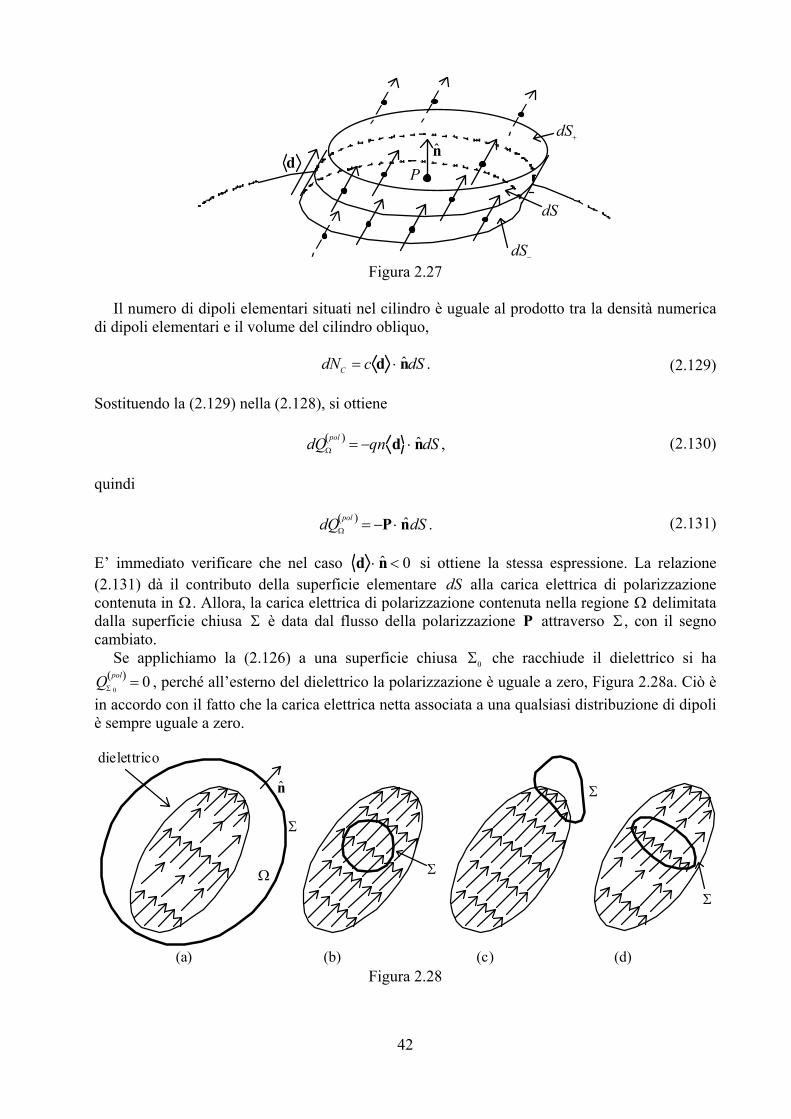
42
nd
dS
P
dS+
dS− Figura 2.27
Il numero di dipoli elementari situati nel cilindro è uguale al prodotto tra la densità numerica
di dipoli elementari e il volume del cilindro obliquo,
dNC = c d ⋅ ˆ n dS . (2.129) Sostituendo la (2.129) nella (2.128), si ottiene
dQΩ
pol( ) = −qn d ⋅ ˆ n dS , (2.130) quindi
dQΩ
pol( ) = −P ⋅ ˆ n dS . (2.131) E’ immediato verificare che nel caso d ⋅ ˆ n < 0 si ottiene la stessa espressione. La relazione (2.131) dà il contributo della superficie elementare dS alla carica elettrica di polarizzazione contenuta in Ω. Allora, la carica elettrica di polarizzazione contenuta nella regione Ω delimitata dalla superficie chiusa Σ è data dal flusso della polarizzazione P attraverso Σ , con il segno cambiato.
Se applichiamo la (2.126) a una superficie chiusa Σ0 che racchiude il dielettrico si ha QΣ 0
pol( ) = 0 , perché all’esterno del dielettrico la polarizzazione è uguale a zero, Figura 2.28a. Ciò è in accordo con il fatto che la carica elettrica netta associata a una qualsiasi distribuzione di dipoli è sempre uguale a zero.
Σ
n
Ω
dielettrico
Σ
Σ
Σ
(a) (b) (c) (d) Figura 2.28

43
Si consideri, ora, una distribuzione uniforme di polarizzazione all’interno della regione di spazio Ω. E’ evidente che il flusso attraverso qualsiasi superficie chiusa che si trova completamente in Ω è uguale a zero 20, Figura 2.28b. Invece, la carica netta di polarizzazione all’interno di qualsiasi superficie chiusa che si trova a cavallo della frontiera di Ω può essere diversa da zero, Figura 2.28c. In corrispondenza della superficie del dielettrico c’è una distribuzione con densità superficiale di carica di polarizzazione.
Si consideri, infine, in Ω una distribuzione di polarizzazione non uniforme, Figura 2.28d. In queste situazioni, la carica di polarizzazione all’interno di una generica superficie chiusa situata completamente in Ω può essere diversa da zero.Come abbiamo già anticipato, le cariche di polarizzazione non possono che contribuire allo stesso modo delle cariche libere al flusso del campo elettrico attraverso una generica superficie chiusa. Di conseguenza, in presenza di materiali dielettrici la legge di Gauss (per il campo elettrico) diventa:
ε0E( )⋅ ˆ n dS =
Σ∫∫ QΩ
lib( ) + QΩpol( ) , (2.132)
dove QΩ
lib( ) e QΩ
pol( ) sono, rispettivamente, la carica libera netta e la carica di polarizzazione netta contenute nella regione Ω delimitata dalla superficie Σ . Sostituendo nella (2.132) l’espressione di QΣ
pol( ) data dalla (2.126) si ha
ε0E( )⋅ ˆ n dS =
Σ∫∫ QΩ
lib( ) − P ⋅ ˆ n dSΣ∫∫ . (2.133)
E’ utile riscrivere questa relazione raggruppando i due termini espressi attraverso flussi. Così facendo si ottiene la seguente equazione,
ε0E + P( )⋅ ˆ n dS =
Σ∫∫ QΩ
lib( ). (2.134)
Introducendo, allora, il campo di spostamento elettrico D , così definito
D ≡ ε0E + P , (2.135) la legge di Gauss (per il campo elettrico) assume la forma, più generale,
D⋅ˆ n dS =
Σ∫∫ QΩ
lib( ). (2.136)
In assenza di dielettrici si ha P = 0 , quindi D = ε0E e la (2.136) si riduce alla legge di Gauss per il vuoto (2.37). Nel Sistema Internazionale le dimensioni fisiche del campo di spostamento elettrico sono il “coulomb/metro2 ” (C /m2 ).
Così come la carica elettrica libera, anche la carica elettrica legata deve verificare la legge della conservazione della carica. Ciò implica che, se la carica di polarizzazione netta contenuta all’interno di una data regione Ω varia nel tempo, deve esserci una corrente elettrica di
20 Il flusso attraverso una superficie chiusa di un campo vettoriale uniforme è sempre uguale a zero.

44
polarizzazione che attraversa la frontiera Σ di Ω. Il campo di densità di corrente di polarizzazione J pol è dato da 21
J pol =∂P∂t
. (2.137)
E’ immediato verificare che il campo J pol dato dalla (2.137) verifica l’equazione di conservazione della carica di polarizzazione,
J pol ⋅ ˆ n dS = −
dQΩpol( )
dtΣ∫∫ . (2.138)
Infatti, sostituendo la (2.126) nella (2.137) si ottiene ( Σ è invariabile nel tempo)
J pol ⋅ ˆ n dS =
ddtΣ
∫∫ P ⋅ ˆ n dS =∂P∂t
⋅ ˆ n dSΣ∫∫
Σ∫∫ . (2.139)
Le correnti elettriche di polarizzazione non possono che contribuire allo stesso modo delle
correnti elettriche libere alla circuitazione del campo magnetico nella legge di Ampere-Maxwell (2.63). Di conseguenza, in presenza di materiali dielettrici la legge di Ampere-Maxwell diventa:
Bµ 0
⋅ˆ t dlΓ∫ = µ 0 iS
lib( ) t( )+ iSpol( ) t( )[ ]+
∂∂t
ε0E( )⋅ ˆ n dSS∫∫ , (2.140)
dove iS
lib( ) e iS
pol( ) sono, rispettivamente, l’intensità di corrente elettrica libera e l’intensità di corrente elettrica di polarizzazione che attraversano la superficie aperta S delimitata dalla linea chiusa Γ . Essendo
iS
pol( ) = J pol ⋅ ˆ n dSS∫∫ , (2.141)
dalla (2.137) si ha
iS
pol( ) =∂P∂t
⋅ ˆ n dSS∫∫ . (2.142)
Sostituendo la (2.142) nella (2.140) si ottiene finalmente la legge di Ampere-Maxwell in presenza di dielettrici,
Bµ 0
⋅ˆ t dlΓ∫ = iS
lib( ) t( )+∂D∂t
⋅ ˆ n dSS∫∫ . (2.143)
Il vantaggio nell’introdurre il campo di spostamento elettrico D come un’ulteriore variabile sta proprio nel fatto che nella legge di Gauss (2.136) compare come “sorgente” solo la carica
21 La quantità di carica elettrica di polarizzazione netta che nell’intervallo di tempo t ,t + dt( ) attraversa la superficie elementare dS , contando con il proprio segno le cariche che l’attraversano nel verso definito da ˆ n e con il segno cambiato le cariche che l’attraversano nel verso opposto è data da ∂P /∂t( )dt[ ]⋅ ˆ n dS .
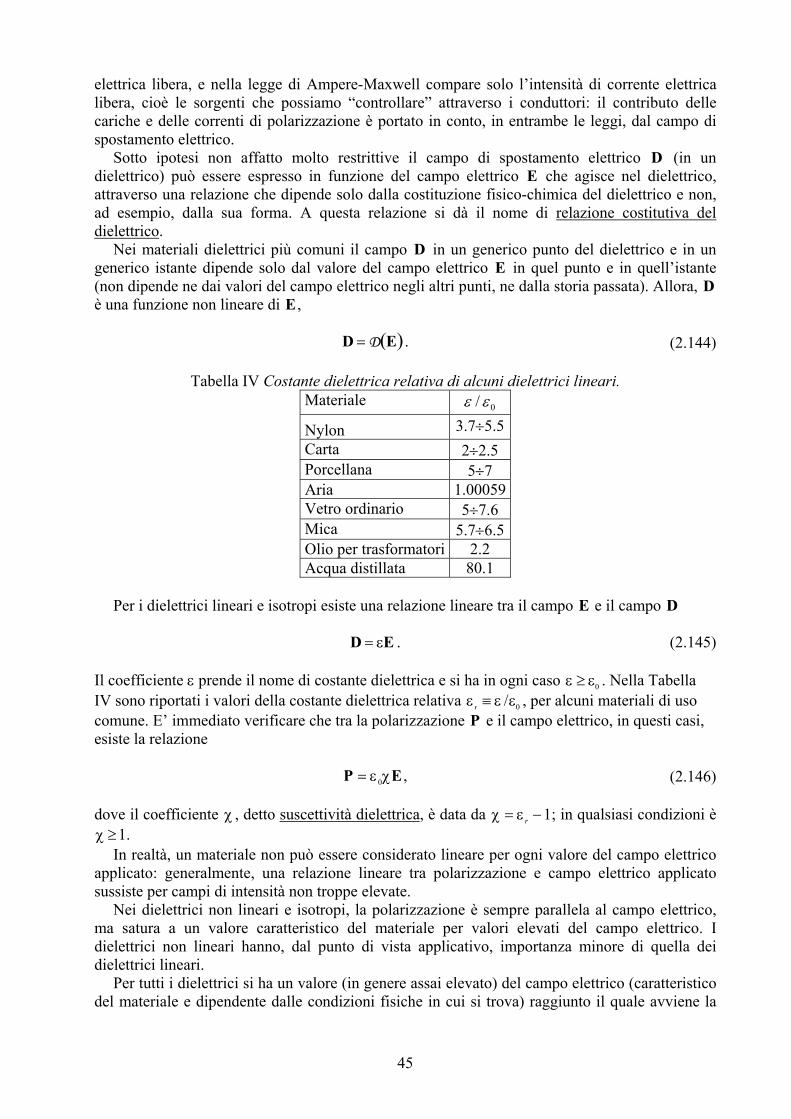
45
elettrica libera, e nella legge di Ampere-Maxwell compare solo l’intensità di corrente elettrica libera, cioè le sorgenti che possiamo “controllare” attraverso i conduttori: il contributo delle cariche e delle correnti di polarizzazione è portato in conto, in entrambe le leggi, dal campo di spostamento elettrico.
Sotto ipotesi non affatto molto restrittive il campo di spostamento elettrico D (in un dielettrico) può essere espresso in funzione del campo elettrico E che agisce nel dielettrico, attraverso una relazione che dipende solo dalla costituzione fisico-chimica del dielettrico e non, ad esempio, dalla sua forma. A questa relazione si dà il nome di relazione costitutiva del dielettrico.
Nei materiali dielettrici più comuni il campo D in un generico punto del dielettrico e in un generico istante dipende solo dal valore del campo elettrico E in quel punto e in quell’istante (non dipende ne dai valori del campo elettrico negli altri punti, ne dalla storia passata). Allora, D è una funzione non lineare di E ,
D = D E( ) . (2.144)
Tabella IV Costante dielettrica relativa di alcuni dielettrici lineari. Materiale 0/ εε
Nylon 3.7÷5.5Carta 2÷2.5
Porcellana 5÷7
Aria 1.00059Vetro ordinario 5÷7.6
Mica 5.7÷6.5
Olio per trasformatori 2.2
Acqua distillata 80.1
Per i dielettrici lineari e isotropi esiste una relazione lineare tra il campo E e il campo D
D = εE . (2.145)
Il coefficiente ε prende il nome di costante dielettrica e si ha in ogni caso ε ≥ ε0 . Nella Tabella IV sono riportati i valori della costante dielettrica relativa ε r ≡ ε /ε0 , per alcuni materiali di uso comune. E’ immediato verificare che tra la polarizzazione P e il campo elettrico, in questi casi, esiste la relazione
P = ε0χE , (2.146) dove il coefficiente χ , detto suscettività dielettrica, è data da χ = ε r −1; in qualsiasi condizioni è χ ≥1.
In realtà, un materiale non può essere considerato lineare per ogni valore del campo elettrico applicato: generalmente, una relazione lineare tra polarizzazione e campo elettrico applicato sussiste per campi di intensità non troppe elevate.
Nei dielettrici non lineari e isotropi, la polarizzazione è sempre parallela al campo elettrico, ma satura a un valore caratteristico del materiale per valori elevati del campo elettrico. I dielettrici non lineari hanno, dal punto di vista applicativo, importanza minore di quella dei dielettrici lineari.
Per tutti i dielettrici si ha un valore (in genere assai elevato) del campo elettrico (caratteristico del materiale e dipendente dalle condizioni fisiche in cui si trova) raggiunto il quale avviene la

46
scarica nel dielettrico, cioè un violento fenomeno di conduzione. Ricordiamo che un dielettrico (ideale) è un isolante perfetto. Quando ciò accade si parla di “rottura” del dielettrico, e il valore Emax del campo elettrico, al di sopra del quale si ha la rottura del dielettrico, prende il nome di rigidità dielettrica.
Tabella V Rigidità dielettrica.
Materiale Emax V / m( )
Aria (1atm) 3×106
Nylon 5 ÷ 20 ×106
Olio per trasformatori 5 ÷ 30 ×106
Vetro e mica 40 ÷60 ×106
2.6.3 Materiali magnetici
In questo paragrafo descriveremo il comportamento magnetico dei materiali seguendo una via
simile a quella adottata per i dielettrici. Mentre i dielettrici lineari hanno un comportamento molto diverso da quello del vuoto o
dell’aria, i materiali aventi un comportamento magnetico lineare si comportano praticamente come il vuoto, per cui nella maggior parte delle applicazioni non se ne tiene conto. Invece, i materiali magnetici non lineari (materiali ferromagnetici) hanno la massima importanza dal punto di vista applicativo: basti pensare che lo studio che lo studio dei fenomeni magnetici ha avuto origine dalle comuni calamite, che sono costituite da materiale ferromagnetico.
−e
+Me motoorbitale
momentoangolare intrinseco
(spin)
Figura 2.29
Gli elettroni che circondano il nucleo di un atomo sono caratterizzati, oltre che dal moto
orbitale attorno al nucleo dell’atomo, anche da un momento angolare meccanico intrinseco (spin), Figura 2.29 (è analogo alla Terra che, oltre a ruotare attorno al Sole, ruota anche su stessa). Una molecola o atomo può interagire con un campo magnetico macroscopico in due modi: attraverso le correnti microscopiche associate al moto orbitale degli elettroni “legati”; attraverso il momento magnetico intrinseco associato allo spin degli elettroni. A loro volta, sia le correnti microscopiche associate al moto orbitale degli elettroni che i momenti magnetici intrinseci contribuiscono al campo magnetico macroscopico complessivo.
L’interazione di un materiale con un campo magnetico può essere descritta attraverso un concetto analogo a quello di dipolo elettrico, il dipolo magnetico. Il dipolo magnetico, così come il dipolo elettrico, è caratterizzato da un momento di dipolo.

47
I A m
h
I
A B
C ≠ 0h
I
A B
C=0
h
(a) (b) (c) Figura 2.30
Il dipolo magnetico elementare può essere rappresentato attraverso una spira filiforme
elementare piana, di forma circolare, percorsa da corrente. Esso è caratterizzato dall’intensità di corrente I che attraversa la spira, dall’area della spira A e dal versore ˆ h normale alla superficie della spira, orientato concordemente con il verso di riferimento per l’intensità di corrente, secondo la “regola della mano destra”, Figura 2.30a. Il momento m del dipolo magnetico elementare è definito come
m = IAˆ h . (2.147) La dimensione fisica del momento di dipolo magnetico nel Sistema Internazionale è “ampere ⋅ metro2 ” ( A/m2 ).
Cosa accade a un dipolo magnetico elementare quando interagisce con un campo magnetico uniforme (Figura 8.20b) ? Come nell’interazione di un dipolo elettrico con un campo elettrico uniforme, la risultante delle forze che agiscono sul dipolo magnetico è uguale a zero. Pur essendo il risultante del sistema di forze che agiscono sul dipolo uguale a zero, il momento di questo sistema di forze è diverso da zero, Figura 2.30b. La coppia del momento del sistema di forze che agiscono sul dipolo è data da,
C = m ×B . (2.148) Dunque, il dipolo magnetico immerso in un campo magnetico uniforme non si sposta ma ruota, se libero da ulteriori vincoli, fino ad allinearsi con il campo magnetico, Figura 2.30c. Come per i dipoli elettrici in un campo elettrico, esistono due configurazioni di equilibrio con coppia nulla: una con m ed B equiversi (paralleli) e una con m ed B in verso opposto (antiparalleli). Solo la prima posizione di equilibrio è stabile, l’altra è instabile.
Anche dal punto di vista magnetico le sostanze possono essere distinte in polari e non polari. Nel primo caso (ad esempio, ) ciascuna molecola o atomo costituisce un dipolo magnetico “permanente” indipendentemente da azioni esterne. Nel secondo caso, invece, la caratteristica dipolare magnetica dell’atomo o della molecola insorge come effetto, appunto, di una sollecitazione applicata da un campo magnetico esterno (è il caso, ad esempio, della mica, della paraffina, dell’idrogeno, dei gas nobili).
Un elemento di volume fisicamente infinitesimo di materiale magnetico contiene un elevatissimo numero di atomi o di molecole. Questo volume può essere polarizzato utilizzando due diversi meccanismi. Supponiamo, dapprima, che gli atomi o le molecole siano magneticamente apolari. Con un campo magnetico esterno è possibile indurre in ciascun atomo o molecola un momento di dipolo elementare parallelo e di verso opposto al campo inducente, attraverso il meccanismo fisico che prende il nome di precessione di Larmor. E’ evidente, allora, che se il campo applicato è uniforme nell’elemento di volume in esame tutti i dipoli elementari indotti risulteranno praticamente allineati tra loro, dando così luogo a un momento di dipolo netto diverso da zero, parallelo e con verso opposto al campo inducente. Questo meccanismo di

48
polarizzazione prende il nome di polarizzazione diamagnetica. I materiali in cui questo meccanismo di magnetizzazione è prevalente sono detti diamagnetici.
Consideriamo, ora, il caso di molecole o atomi che hanno un momento di dipolo magnetico permanente. Abbiamo già accennato al fatto che il momento magnetico permanente di un atomo o di una molecola ha due possibili origini (molto diverse tra loro): il moto orbitale degli elettroni legati attorno ai nuclei atomici; il momento magnetico intrinseco degli elettroni. Nel primo caso parliamo di dipolo magnetico “orbitale”, nel secondo di dipolo magnetico di “spin”. In assenza di forze che contrastino il disordine prodotto dall’agitazione termica, il momento di dipolo netto nel volume elementare è mediamente uguale a zero a causa dell’agitazione termica dovuta alla temperatura (assoluta) diversa da zero del materiale, analogamente a quanto accade nei dielettrici composti da sostanze polari. Solo in presenza di una particolare costituzione fisica della materia e/o di un’agente “esterno” come, ad esempio, un campo magnetico è possibile fare assumere ai singoli dipoli permanenti una stessa direzione e, quindi, avere un momento di dipolo netto per l’elemento di volume diverso da zero. Questo meccanismo di polarizzazione prende il nome di polarizzazione per orientazione.
Esistono due meccanismi di polarizzazione per orientazione. I dipoli magnetici di tipo orbitale possono essere costretti ad allinearsi tra loro, contro l’azione disorientatrice dell’agitazione termica, solo attraverso la coppia che nasce dall’interazione con un campo magnetico esterno. Tuttavia, a differenza di quanto si osserva nei dielettrici, la percentuale di dipoli che si riesce in questo modo ad allineare è relativamente bassa, a meno che non si abbiano a disposizione campi magnetici intensissimi, praticamente impossibili da realizzare. Questo è il meccanismo della polarizzazione paramagnetica. I materiali in cui è prevalente il fenomeno della polarizzazione paramagnetica sono detti paramagnetici.
Invece, sui dipoli magnetici di spin agisce, oltre alla coppia dovuta all’interazione con un eventuale campo magnetico esterno, un’altra forza, molto intensa, di natura quantistica, che tende a far allineare i dipoli, contrastando, così, l’azione disorientatrice dell’agitazione termica. Questa forza è talmente intensa, da poter dar luogo in regioni macroscopiche a una magnetizzazione “spontanea”, cioè a un momento di dipolo magnetico netto diverso da zero anche in assenza di un campo magnetico esterno (se la temperatura del materiale è al di sotto di un valore caratteristico, che prende il nome di temperatura di Curie). Le calamite sono un esempio di magnetizzazione spontanea. Questo è il meccanismo della polarizzazione ferromagnetica. I materiali in cui, invece, è prevalente il fenomeno della polarizzazione ferromagnetica sono detti ferromagnetici.
Si assuma che nell’elemento di volume siano presenti dN atomi o molecole con momenti di dipolo magnetico (sia indotti che permanenti) m1,m2 ,...,mdN al generico istante t. Si definisce il valor medio del momento di dipolo magnetico nel punto P come
m =1
dNmi
i=1
dN
∑ . (2.149)
Il momento di dipolo magnetico medio è uguale a zero se i singoli dipoli che si trovano nella regione elementare sono orientati in modo casuale.
Come per i dielettrici, un modello macroscopico del fenomeno della magnetizzazione di un materiale magnetico consiste nel rappresentare il materiale attraverso un continuo di dipoli magnetici elementari eguali, di momento m , distribuiti con densità numerica
c =dNdV
. (2.150)
Posto
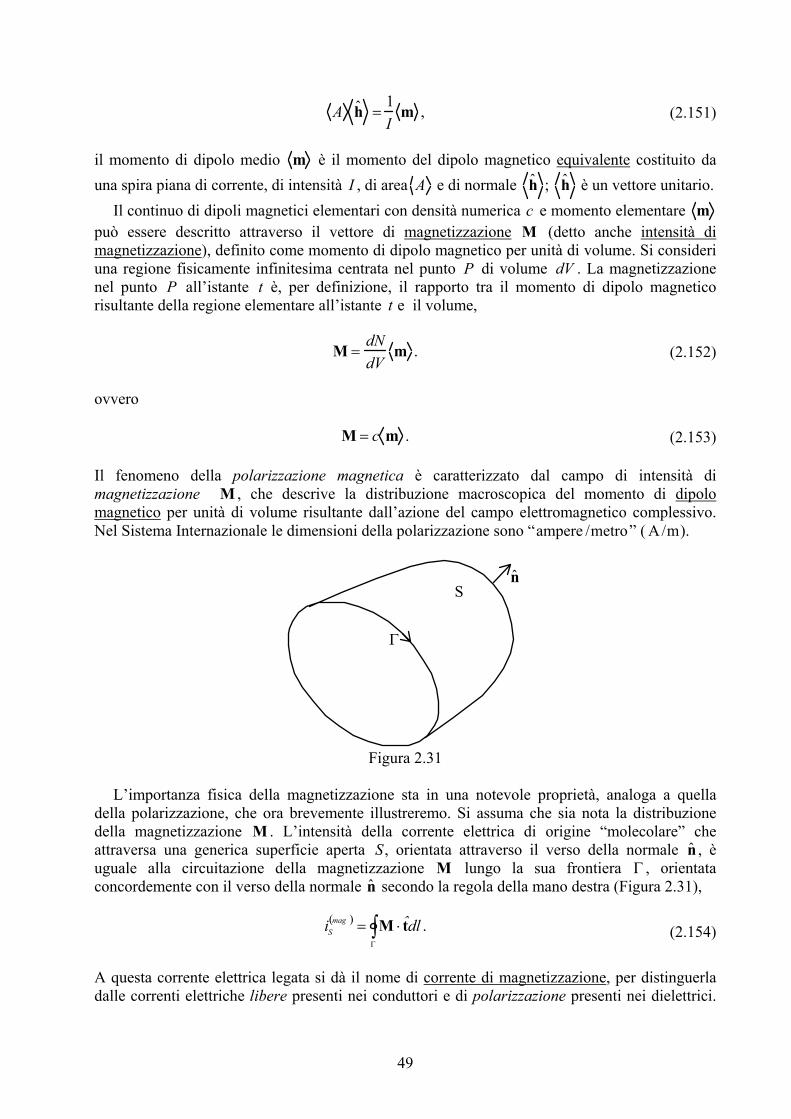
49
A ˆ h =1I
m , (2.151)
il momento di dipolo medio m è il momento del dipolo magnetico equivalente costituito da una spira piana di corrente, di intensità I , di area A e di normale ˆ h ; ˆ h è un vettore unitario.
Il continuo di dipoli magnetici elementari con densità numerica c e momento elementare m può essere descritto attraverso il vettore di magnetizzazione M (detto anche intensità di magnetizzazione), definito come momento di dipolo magnetico per unità di volume. Si consideri una regione fisicamente infinitesima centrata nel punto P di volume dV . La magnetizzazione nel punto P all’istante t è, per definizione, il rapporto tra il momento di dipolo magnetico risultante della regione elementare all’istante t e il volume,
M =dNdV
m . (2.152)
ovvero
M = c m . (2.153) Il fenomeno della polarizzazione magnetica è caratterizzato dal campo di intensità di magnetizzazione M , che descrive la distribuzione macroscopica del momento di dipolo magnetico per unità di volume risultante dall’azione del campo elettromagnetico complessivo. Nel Sistema Internazionale le dimensioni della polarizzazione sono “ampere /metro” ( A/m).
nS
Γ
Figura 2.31
L’importanza fisica della magnetizzazione sta in una notevole proprietà, analoga a quella della polarizzazione, che ora brevemente illustreremo. Si assuma che sia nota la distribuzione della magnetizzazione M . L’intensità della corrente elettrica di origine “molecolare” che attraversa una generica superficie aperta S , orientata attraverso il verso della normale ˆ n , è uguale alla circuitazione della magnetizzazione M lungo la sua frontiera Γ , orientata concordemente con il verso della normale ˆ n secondo la regola della mano destra (Figura 2.31),
iS
mag( ) = M ⋅ˆ t dlΓ∫ . (2.154)
A questa corrente elettrica legata si dà il nome di corrente di magnetizzazione, per distinguerla dalle correnti elettriche libere presenti nei conduttori e di polarizzazione presenti nei dielettrici.
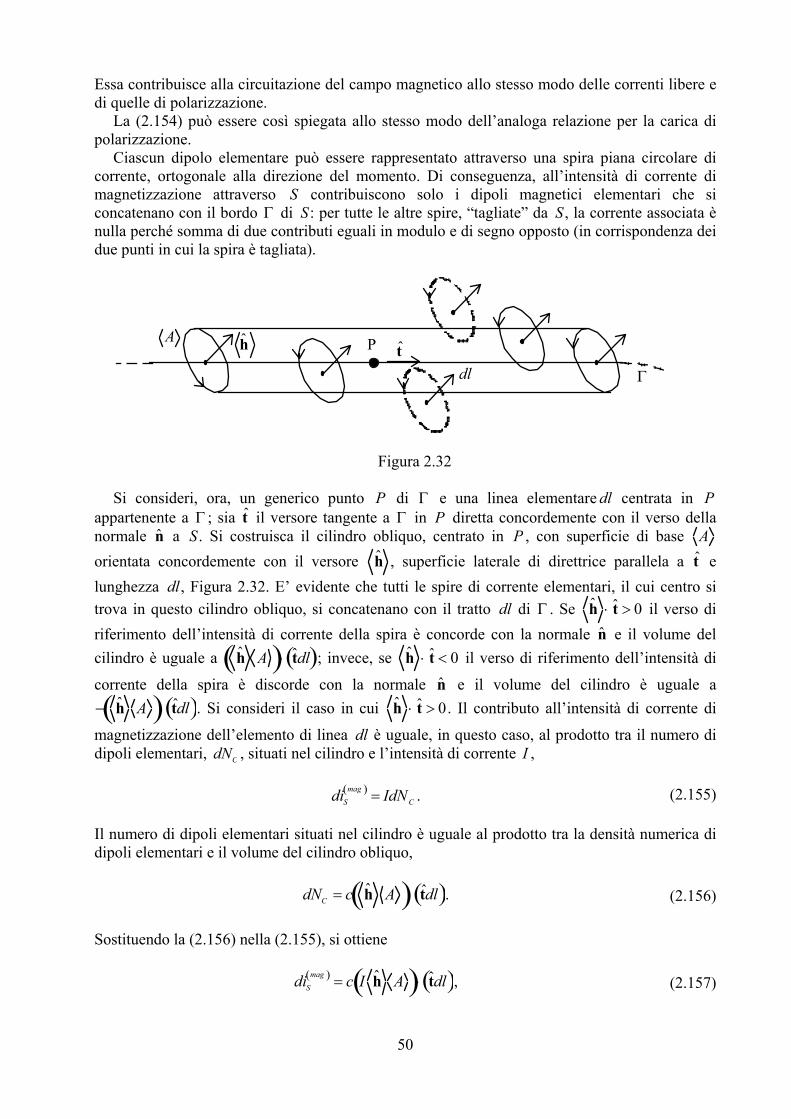
50
Essa contribuisce alla circuitazione del campo magnetico allo stesso modo delle correnti libere e di quelle di polarizzazione. La (2.154) può essere così spiegata allo stesso modo dell’analoga relazione per la carica di polarizzazione.
Ciascun dipolo elementare può essere rappresentato attraverso una spira piana circolare di corrente, ortogonale alla direzione del momento. Di conseguenza, all’intensità di corrente di magnetizzazione attraverso S contribuiscono solo i dipoli magnetici elementari che si concatenano con il bordo Γ di S : per tutte le altre spire, “tagliate” da S , la corrente associata è nulla perché somma di due contributi eguali in modulo e di segno opposto (in corrispondenza dei due punti in cui la spira è tagliata).
tdl
hA
Γ
P
Figura 2.32
Si consideri, ora, un generico punto P di Γ e una linea elementare dl centrata in P appartenente a Γ ; sia ˆ t il versore tangente a Γ in P diretta concordemente con il verso della normale ˆ n a S . Si costruisca il cilindro obliquo, centrato in P , con superficie di base A orientata concordemente con il versore ˆ h , superficie laterale di direttrice parallela a ˆ t e lunghezza dl, Figura 2.32. E’ evidente che tutti le spire di corrente elementari, il cui centro si trova in questo cilindro obliquo, si concatenano con il tratto dl di Γ . Se ˆ h ⋅ ˆ t > 0 il verso di riferimento dell’intensità di corrente della spira è concorde con la normale ˆ n e il volume del cilindro è uguale a ˆ h A( )⋅ ˆ t dl( ); invece, se ˆ h ⋅ ˆ t < 0 il verso di riferimento dell’intensità di
corrente della spira è discorde con la normale ˆ n e il volume del cilindro è uguale a − ˆ h A( )⋅ ˆ t dl( ). Si consideri il caso in cui ˆ h ⋅ ˆ t > 0. Il contributo all’intensità di corrente di
magnetizzazione dell’elemento di linea dl è uguale, in questo caso, al prodotto tra il numero di dipoli elementari, dNC , situati nel cilindro e l’intensità di corrente I ,
diS
mag( ) = IdNC . (2.155) Il numero di dipoli elementari situati nel cilindro è uguale al prodotto tra la densità numerica di dipoli elementari e il volume del cilindro obliquo,
dNC = c ˆ h A( )⋅ ˆ t dl( ). (2.156) Sostituendo la (2.156) nella (2.155), si ottiene
diS
mag( ) = c I ˆ h A( )⋅ ˆ t dl( ), (2.157)
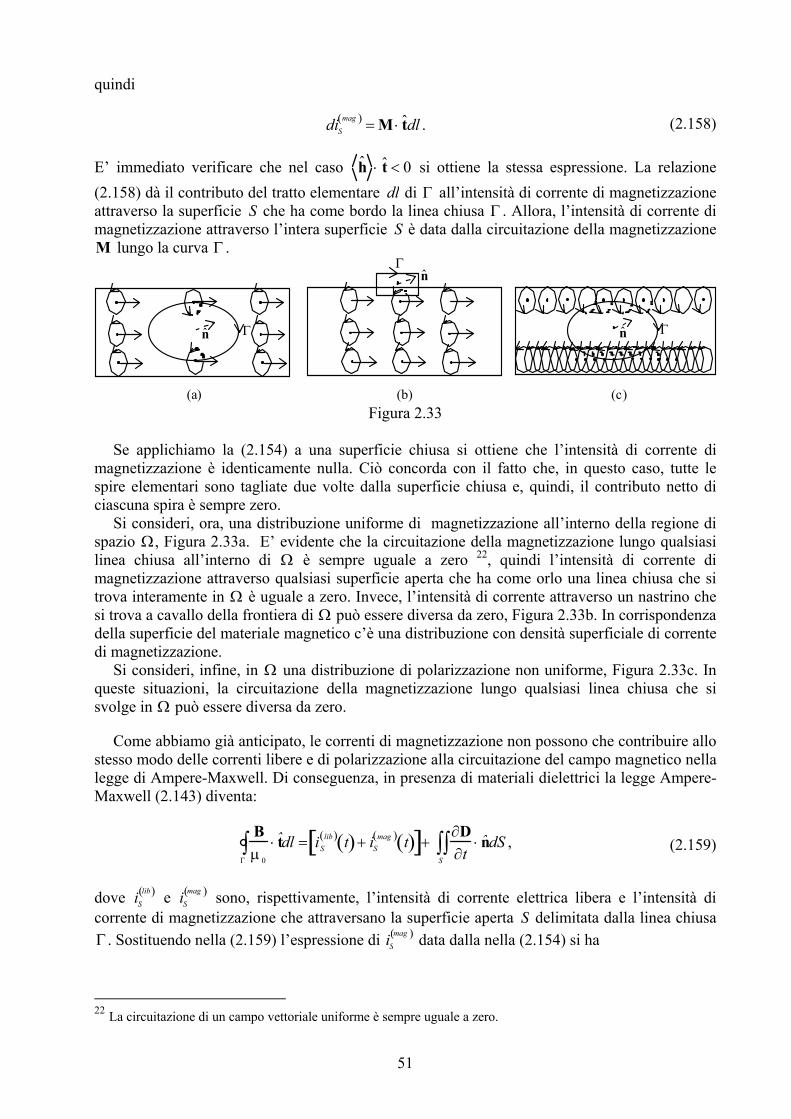
51
quindi
diS
mag( ) = M ⋅ ˆ t dl . (2.158) E’ immediato verificare che nel caso ˆ h ⋅ ˆ t < 0 si ottiene la stessa espressione. La relazione (2.158) dà il contributo del tratto elementare dl di Γ all’intensità di corrente di magnetizzazione attraverso la superficie S che ha come bordo la linea chiusa Γ . Allora, l’intensità di corrente di magnetizzazione attraverso l’intera superficie S è data dalla circuitazione della magnetizzazione M lungo la curva Γ .
(a) (b) (c)
Γn
nΓ
Γn
Figura 2.33
Se applichiamo la (2.154) a una superficie chiusa si ottiene che l’intensità di corrente di
magnetizzazione è identicamente nulla. Ciò concorda con il fatto che, in questo caso, tutte le spire elementari sono tagliate due volte dalla superficie chiusa e, quindi, il contributo netto di ciascuna spira è sempre zero. Si consideri, ora, una distribuzione uniforme di magnetizzazione all’interno della regione di spazio Ω, Figura 2.33a. E’ evidente che la circuitazione della magnetizzazione lungo qualsiasi linea chiusa all’interno di Ω è sempre uguale a zero 22, quindi l’intensità di corrente di magnetizzazione attraverso qualsiasi superficie aperta che ha come orlo una linea chiusa che si trova interamente in Ω è uguale a zero. Invece, l’intensità di corrente attraverso un nastrino che si trova a cavallo della frontiera di Ω può essere diversa da zero, Figura 2.33b. In corrispondenza della superficie del materiale magnetico c’è una distribuzione con densità superficiale di corrente di magnetizzazione.
Si consideri, infine, in Ω una distribuzione di polarizzazione non uniforme, Figura 2.33c. In queste situazioni, la circuitazione della magnetizzazione lungo qualsiasi linea chiusa che si svolge in Ω può essere diversa da zero.
Come abbiamo già anticipato, le correnti di magnetizzazione non possono che contribuire allo stesso modo delle correnti libere e di polarizzazione alla circuitazione del campo magnetico nella legge di Ampere-Maxwell. Di conseguenza, in presenza di materiali dielettrici la legge Ampere-Maxwell (2.143) diventa:
Bµ 0
⋅ˆ t dlΓ∫ = iS
lib( ) t( )+ iSmag( ) t( )[ ]+
∂D∂t
⋅ ˆ n dSS∫∫ , (2.159)
dove iS
lib( ) e iS
mag( ) sono, rispettivamente, l’intensità di corrente elettrica libera e l’intensità di corrente di magnetizzazione che attraversano la superficie aperta S delimitata dalla linea chiusa Γ . Sostituendo nella (2.159) l’espressione di iS
mag( ) data dalla nella (2.154) si ha
22 La circuitazione di un campo vettoriale uniforme è sempre uguale a zero.

52
Bµ 0
⋅ˆ t dlΓ∫ = iS
lib( ) t( )+ M ⋅ˆ t dlΓ∫ +
∂D∂t
⋅ ˆ n dSS∫∫ . (2.160)
E’ utile riscrivere questa relazione raggruppando i due termini espressi attraverso la circuitazione. Così facendo si ottiene la seguente equazione,
Bµ 0
−M
⋅ˆ t dl
Γ∫ = iS
lib( ) t( )+∂D∂t
⋅ ˆ n dSS∫∫ . (2.161)
Introducendo, allora, il campo intensità campo magnetica H , così definito
H ≡Bµ0
−M , (2.162)
la legge di Ampere-Maxwell assume la forma, più generale,
H ⋅ˆ t dl
Γ∫ = iS
lib( ) t( )+∂D∂t
⋅ ˆ n dSS∫∫ . (2.163)
In assenza di materiali magnetici si ha M = 0 , quindi H = B /µ 0 e la (2.163) si riduce alla legge di Ampere-Maxwell per il vuoto. Nel Sistema Internazionale le dimensioni fisiche del campo di intensità magnetica sono il “ampere /metro” ( A/m). Il vantaggio nell’introdurre l’intensità del campo magnetico H come un’ulteriore variabile è analogo a quello che si ha nell’introdurre il campo di spostamento elettrico D : sta proprio nel fatto che nella legge di Ampere-Maxwell (2.163) compare come “sorgente” solo l’intensità di corrente elettrica libera, cioè le correnti che possiamo “controllare” attraverso conduttori: il contributo delle correnti di magnetizzazione situate nel materiale magnetico è portato in conto dalla presenza dell’intensità del campo magnetico.
Sotto ipotesi non affatto molto restrittive il campo magnetico B (in un materiale magnetico) può essere espresso in funzione dell’intensità del campo magnetico H che agisce nel materiale, attraverso una relazione che dipende solo dalla costituzione fisico-chimica del materiale magnetico. Alla relazione tra il campo B e il campo H in un materiale magnetico si dà il nome di relazione costitutiva del materiale magnetico.
I materiali diamagnetici e paramagnetici sono, sostanzialmente, materiali senza memoria, lineari e isotropi, quindi si ha
B =µH . (2.164) Il coefficiente µ prende il nome di permeabilità magnetica del materiale. Per i materiali diamagnetici si ha 0 <µ <µ 0 in accordo con le considerazioni precedentemente svolte, invece per i materiali diamagnetici si ha µ > µ0 . E’ immediato verificare che tra la magnetizzazione M e l’intensità del campo magnetico H , in questi casi, esiste la relazione
M = µ0χ mH ; (2.165) il coefficiente χm , detto suscettività magnetica, è dato da χ = µr −1, dove µr =µ /µ 0 è la permeabilità magnetica relativa.

53
Per i materiali diamagnetici la suscettività magnetica è negativa ed è molto piccola in valore assoluto, dell’ordine di 10−5 nella maggior parte dei casi; ad esempio, per il rame si ha χm = −0.9 ×10−5 . Fa eccezione il bismuto per il quale si ha χm = −1.6 ×10−4 . Per i materiali diamagnetici la suscettività magnetica è positiva ed è circa 100 volte maggiore di quella dei materiali diamagnetici (in valore assoluto). I materiali paramagnetici sono tutti quegli atomi, ioni e molecole che hanno gusci elettronici incompleti, il che si verifica per la massima parte delle sostanze. Un ulteriore contributo alla magnetizzazione nei metalli paramagnetici può venire dal momento magnetico intrinseco degli elettroni liberi come, ad esempio, nel sodio, platino, alluminio, tungsteno, metalli alcalini e alcalino-terrosi.
xB = BxH = Hx
Figura 2.34
∆B = µ0∆H
HM
HC
Bmax
B
H
Br
0
A
Figura 2.35 Ciclo di isteresi di un materiale ferromagnetico
I materiali ferromagnetici, invece, hanno memoria e il loro comportamento è fortemente non lineare a causa del fenomeno di isteresi magnetica. Si consideri un provino cilindrico di materiale ferromagnetico, molto lungo e sottile, e si assuma che sia inizialmente smagnetizzato, cioè al suo interno sia M = 0 . Si applichi una intensità di campo magnetico H lungo l’asse del provino e si misuri la componente del campo magnetico, B, indotta lungo la stessa direzione, Figura 2.34. Si riporti su di un piano il grafico dell’andamento del campo magnetico B in funzione dell’intensità H . In Figura 2.35 è riportata una vicenda tipica di magnetizzazione: si distinguono una curva di prima magnetizzazione (tratto OA) e, a partire dal punto A, un processo ciclico che, come si vede, può non richiudersi esattamente. Se l’intensità del campo magnetico viene invertito tra i valori ±H M , l’evoluzione si assesta su cicli simmetrici di isteresi. Al variare

54
di HM varia l’ampiezza e, quindi, l’area dei cicli. Il raggiungimento della saturazione è evidenziato dal fatto che, per campi sufficientemente intensi, l’incremento ∆B corrispondente ad un incremento ∆H è lo stesso che si avrebbe nel vuoto e cioè ∆B = µ0∆H : in queste condizioni tutti i dipoli elementari sono allineati parallelamente al campo magnetico. Il ciclo di isteresi che viene assunto come termine di paragone è quello descritto a partire dalla saturazione.
Tabella V Caratteristiche dei materiali ferromagnetici
Materiali “dolci” µr(i ) µr
(max) Bmax T( ) Br T( ) Hc A/m( )Cobalto 10 175 1.79 0.31 10 Nichel 400 1100 0.61 0.33 1.3 Ferro puro 104 2 ⋅105 2.16 1.2 4 ⋅10−2 Ferro commerciale 200 5000 2.16 1.2 0.8 Ghisa 70 600 2.1 1.4 5 Ferro-Silicio (4%) 500 7000 2.14 0.8 0.4
Permalloy (Ni-Fe 22%)
104 5 ⋅105 1.08 0.6 4 ⋅10−2
Superpermalloy (Ni-Fe 15%, Mo 5%, Mn 0,5%)
105 3 ⋅105 0.78 0.6 4 ⋅10−3
Mumetal (Ni-Cu 5%-Cr 2%)
2.5 ⋅104 1.5 ⋅105 0.75 0.6 1.2 ⋅10−2
Isoperm (Fe-Ni 40%-Cu 10%)
50 50 1.0 4 ⋅10−2 4 ⋅10−2
Materiali “duri” BH max
J/m3 Br T( ) Hc A/m( )
Acciaio al tungsteno - - 2640 1.05 5600 Alnico V (Fe, Al 8%, Ni 14%, Co 24%, CU 3%)
- - 42400 1.25 50000
I principali parametri usualmente considerati per la caratterizzazione dei legami B − H sono: - le permeabilità relative differenziali valutate lungo la curva di prima magnetizzazione
secondo la µr d( ) =1
µ 0
dBdH
, in particolare quella iniziale B = 0,H = 0( ) e quella massima;
- il valore della magnetizzazione di saturazione Ms = Bmax /µ 0 ; - il campo magnetico residuo che si ha quando l’intensità del campo magnetico è portata a
zero; - il campo coercitivo HC che è necessario applicare nel verso opposto a ˆ x per ridurre a zero
il campo magnetico residuo; - l’area del ciclo massimo che è uguale al lavoro elettrico che bisogna spendere per dar
luogo al ciclo, lavoro che è tutto dissipato in calore; oppure il valore massimo del prodotto BH valutato lungo il ciclo, di particolare interesse nelle applicazioni che sfruttano il magnetismo permanente.
Le varietà dei comportamenti, sensibilissimi alle variazioni delle composizioni e dei trattamenti, è tale da rendere impossibile la presentazione di un quadro esauriente. In Tabella V vengono riportati i parametri caratteristici dei materiali più comuni nelle applicazioni.

55
Vengono elencati anzitutto i tre elementi che allo stato puro sono ferromagnetici; li affianchiamo con alcune leghe. Indice di qualità di queste materiali sono gli elevati valori della permeabilità e il basso valore del campo coercitivo, cui si collega il basso valore dell’area del ciclo. Questi materiali ferromagnetici sono detti dolci e vengono impiegati in tutte quelle applicazioni in cui interessa limitare al massimo le correnti necessarie per produrre e controllare il flusso del campo magnetico necessari per l’applicazione specifica (nuclei di elettromagneti in continua o in alternata, rotori e statori di macchine elettriche rotanti, nuclei dei trasformatori e di induttori con alto coefficiente di autoinduzione, …), ovvero per canalizzarli e distribuirli in modo particolare (schermi magnetici, magneti di deflessione per particelle cariche, …). Un secondo gruppo è costituito da materiali che hanno un elevato campo coercitivo e un elevato prodotto BH . Questi materiali ferromagnetici, detti duri, vengono impiegati per realizzare flussi magnetici costanti nel tempo (magneti permanenti, calamite, …). 2.8 Le equazioni di Maxwell in presenza di materiali
A questo punto possiamo scrivere le equazioni di Maxwell in presenza di mezzi materiali. In
base a quanto abbiamo appena visto è evidente che la legge di Faraday-Neumann, la legge della conservazione del flusso del campo magnetico e la legge della conservazione della carica libera restano invariate. In presenza di mezzi materiali devono essere modificate solo la legge di Gauss e la legge di Ampere-Maxwell.
2.8.1 Equazioni di Maxwell in presenza di materiali in forma integrale
Le equazioni di Maxwell in forma integrale in presenza di mezzi materiali sono (solo per non
appesantire la notazione omettiamo i contributi dovuti a eventuali distribuzioni singolari di cariche e correnti libere):
D ⋅ ˆ n dS =
Σ∫∫ ρldv
Ω∫∫∫ , (2.167)
B ⋅ ˆ n dS =
Σ∫∫ 0, (2.168)
E ⋅ˆ t dl
Γ∫ =
∂B∂t
⋅ ˆ n dSS∫∫ , (2.169)
H ⋅ˆ t dl
Γ∫ = J l +
∂D∂t
⋅ ˆ n dS
S∫∫ . (2.170)
La legge della conservazione della carica libera è
Jl
Σ∫∫ ⋅ ˆ n dS = −
∂ρ l
∂tdv
Ω∫∫∫ . (2.171)
Come si vede, nella legge di Gauss figura a primo membro un nuovo campo vettoriale, il vettore “spostamento” elettrico D (detto anche “induzione elettrica”) e, a secondo membro sono presenti le sole sorgenti libere, ρlib . Il campo D è legato al campo E e al campo P tramite la relazione
D = ε0E + P . (2.172)

56
Analogamente, nella legge di Ampère-Maxwell, figura a primo membro un nuovo campo vettoriale H (l’intensità di campo magnetico), mentre, a secondo membro, sono presenti la densità di corrente libera J lib e la densità di corrente di spostamento ∂D / ∂t . Il campo H è legato al campo B e al campo M tramite la relazione
B = µ 0(H + M). (2.173) La circuitazione di H lungo una qualsiasi curva chiusa orientata è detta forza magneto-motrice (f.m.m.); essa ha le stesse dimensioni della corrente elettrica. Nella legge di conservazione della carica, infine, figurano le sole sorgenti libere. Le leggi generali del campo elettromagnetico (2.167)÷(2.171) sono indipendenti dalla costituzione fisica dei mezzi materiali presenti. Esse non sono, di per sé, sufficienti a descrivere il campo elettromagnetico: occorrono altre relazioni, dette “costitutive”, che dipendono univocamente dalla costituzione fisica dei mezzi materiali, capaci di definire le caratteristiche fisiche di tipo elettromagnetico dei mezzi materiali presenti. Esse sono state brevemente descritte nel paragrafo precedente.
2.8.2 Equazioni di Maxwell in presenza di materiali in forma locale
Le equazioni di Maxwell per i mezzi materiali (2.167)÷(2.171) possono essere espresse in forma locale, così come è stato fatto per il caso del vuoto. In presenza di corpi materiali occorre, però, distinguere i punti in cui le proprietà dei mezzi materiali sono continue da quelli in cui sono discontinue (ciò accade in genere in corrispondenza di superfici di discontinuità dei parametri fisici caratteristici dei materiali, come, ad esempio, la costante dielettrica, la conducibilità, etc). Operando questa distinzione abbiamo:
Punti regolari Punti di discontinuità
∇ ⋅ D = ρ lib , ˆ n ⋅ (D2 − D1) = σ lib , (2.174) ∇ ⋅ B = 0, ˆ n ⋅ (B2 −B1) = 0 , (2.175)
∇ × E = −∂B∂t
, ˆ n × (E2 −E1) = 0 , (2.176)
∇ × H = J lib +∂D∂t
, ˆ n × (H2 − H1) = JSlib , (2.177)
∇ ⋅ J lib = −∂ρlib
∂t, ˆ n ⋅ (J 2 − J1) = −
∂σ lib
∂t. (2.178)
Nelle (174), (177) e (178) σlib e Jslib sono, rispettivamente, distribuzioni superficiali di cariche e di correnti libere; come poi vedremo esse possono nascere sulle superfici dei conduttori. Il quadro completo della teoria dell’elettromagnetismo in presenza di mezzi materiali lineari, isotropi e senza “memoria” è dunque costituito dalle equazioni di Maxwell in forma locale (2.174)÷(2.178) (o equivalentemente da quelle in forma integrale (2.167)÷(2.171)), dalla relazione costitutiva (2.119) per i conduttori ohmici, dalla relazione costitutiva (2.145) per i dielettrici lineari ed isotropi e dalla relazione costitutiva (2.164) per i materiali magnetici lineari ed isotropi, unite alle condizioni iniziali e alle condizioni di “regolarità” all’infinito. Così come accade per le equazioni del campo elettromagnetico nel vuoto, le equazioni (2.174)÷(2.178) (o le equivalenti (2.167)÷(2.171)), non sono tutte “indipendenti”.
57
L’equazione (2.176) (o l’equivalente (2.169)) descrive il fenomeno dell’induzione elettromagnetica secondo il quale, in presenza di campi magnetici variabili nel tempo, la circuitazione del campo elettrico è, in generale, diversa da zero. È, questo, uno dei fenomeni più importanti dell’elettromagnetismo: conseguenza immediata è che l’integrale di linea di E, esteso a una linea γ AB , (la tensione elettrica lungo γ AB ), in presenza di un campo magnetico variabile nel tempo, dipende, oltre che dagli estremi A e B, anche dal cammino di integrazione. Quando in una regione dello spazio esiste un campo magnetico variabile nel tempo, ad esso è associato sempre un campo elettrico rotazionale. Il termine della densità di corrente di spostamento ∂D / ∂t nell’equazione di Ampère-Maxwell descrive il fenomeno dell’induzione magnetoelettrica, secondo il quale la circuitazione del campo magnetico lungo una linea chiusa γ non dipende soltanto dal flusso di J, ma anche dal flusso della derivata di D rispetto al tempo. L’accoppiamento tra E e H, prodotto dai fenomeni di induzione elettromagnetica e magnetoelettrica, è all'origine del fenomeno della propagazione del campo elettromagnetico. In presenza di mezzi conduttori c'è un altro meccanismo che accoppia il campo elettrico al campo magnetico: un campo elettrico variabile nel tempo produce nei conduttori correnti che generano un campo magnetico, il quale a sua volta, essendo variabile nel tempo, contribuisce al campo elettrico. Questo accoppiamento è all’origine del fenomeno della diffusione del campo elettromagnetico nei conduttori (correnti di Foucault). Osservazione In tutti i sistemi elettromagnetici “artificiali”, cioè quelli che l'uomo costruisce, le sorgenti “reali” (cioè quelle che è possibile fissare a piacere attraverso “manopole”), non sono né le cariche libere, né le correnti libere, ma i campi elettromotori, oppure le tensioni del campo elettrico tra determinate coppie di punti e lungo certi cammini (si pensi, ad esempio, alle prese di corrente nelle nostre abitazioni, nei laboratori, etc; in questo ultimo caso le sorgenti entrano in gioco tramite le condizioni al contorno). Le cariche e le correnti libere che nascono nei corpi conduttori e sulle loro superfici sono incognite del problema, assieme al campo elettromagnetico. La progettazione di un sistema elettromagnetico si riduce, in ultima analisi, proprio alla determinazione della struttura fisica del sistema e delle “sorgenti reali” che realizzino determinate configurazioni di cariche, correnti e campo elettromagnetico.