Caratterizzazione e controllo di un prototipo di ... te uno strumento interferometrico, descrivendo...
212
Università degli Studi di Roma “La Sapienza” Facoltà di Scienze Matematiche, Fisiche e Naturali Dipartimento di Fisica Caratterizzazione e controllo di un prototipo di sospensione monolitica per l’interferometro Virgo Candidato Relatore Marzia Colombini Prof. Fulvio Ricci Secondo Relatore Dott. Ettore Majorana A. A. 2008/2009
Transcript of Caratterizzazione e controllo di un prototipo di ... te uno strumento interferometrico, descrivendo...
Università degli Studi di Roma “La Sapienza”
Facoltà di Scienze Matematiche, Fisiche e Naturali
Dipartimento di Fisica
Caratterizzazione e controllo di un prototipo di
sospensione monolitica per l’interferometro Virgo
Candidato Relatore
Marzia Colombini Prof. Fulvio Ricci
Secondo Relatore
Dott. Ettore Majorana
A. A. 2008/2009

MM

M
A Meri,per essere stata con me
tutti questi anni

M
Indice
Introduzione IX
1 Le Onde Gravitazionali 11.1 La teoria della Relatività Generale . . . . . . . . . . . . . . . . . . 1
1.1.1 Le equazioni di Einstein . . . . . . . . . . . . . . . . . . . . 21.2 La soluzione ondulatoria delle equazioni di Einstein . . . . . . . . . 4
1.2.1 Proprietà . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.2 Interazione con la materia . . . . . . . . . . . . . . . . . . . 71.2.3 Intensità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3 Le sorgenti di onde gravitazionali . . . . . . . . . . . . . . . . . . . 101.3.1 Stelle di neutroni rotanti . . . . . . . . . . . . . . . . . . . . 111.3.2 Sistemi binari coalescenti . . . . . . . . . . . . . . . . . . . . 12
Stella di Neutroni - Stella di Neutroni . . . . . . . . . . . . . 15Buco nero - Buco nero e sistemi misti . . . . . . . . . . . . . 17
1.3.3 Eventi esplosivi . . . . . . . . . . . . . . . . . . . . . . . . . 171.3.4 Fondo stocastico . . . . . . . . . . . . . . . . . . . . . . . . 19
2 Interferometro laser per la rivelazione delle onde gravitazionali 202.1 Principio di funzionamento di un interferometro . . . . . . . . . . . 20
2.1.1 E!etto del passaggio di un’onda gravitazionale sull’interfe-rometro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2 Sorgenti di rumore in un interferometro terrestre . . . . . . . . . . . 272.2.1 Il rumore ambientale . . . . . . . . . . . . . . . . . . . . . . 292.2.2 Lo shot noise . . . . . . . . . . . . . . . . . . . . . . . . . . 312.2.3 La pressione di radiazione . . . . . . . . . . . . . . . . . . . 332.2.4 La luce di!usa . . . . . . . . . . . . . . . . . . . . . . . . . . 332.2.5 Il rumore termico . . . . . . . . . . . . . . . . . . . . . . . . 34
Il moto browniano . . . . . . . . . . . . . . . . . . . . . . . 34Il Teorema Fluttuazione-Dissipazione . . . . . . . . . . . . . 35Rumore termico in un pendolo semplice reale . . . . . . . . 36Tipi di dissipazione . . . . . . . . . . . . . . . . . . . . . . . 40Il rumore termico nell’interferometro . . . . . . . . . . . . . 42
2.3 Interferometri Laser nello spazio . . . . . . . . . . . . . . . . . . . . 44
V

3 Virgo e VirgoAdvanced 463.1 Virgo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.1.1 Cavità Fabry-Perot . . . . . . . . . . . . . . . . . . . . . . . 463.1.2 Specchio di ricircolo . . . . . . . . . . . . . . . . . . . . . . 493.1.3 Sistema di iniezione . . . . . . . . . . . . . . . . . . . . . . . 493.1.4 Sistema di rivelazione . . . . . . . . . . . . . . . . . . . . . . 513.1.5 Sistema da vuoto . . . . . . . . . . . . . . . . . . . . . . . . 523.1.6 Superattenuatore . . . . . . . . . . . . . . . . . . . . . . . . 533.1.7 Ultimo stadio di sospensione degli specchi . . . . . . . . . . 573.1.8 Sistema di controllo . . . . . . . . . . . . . . . . . . . . . . . 593.1.9 La curva di sensibilità di Virgo . . . . . . . . . . . . . . . . 61
3.2 VirgoAdvanced . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613.2.1 Le modifiche di VirgoAdvanced . . . . . . . . . . . . . . . . 653.2.2 Le sospensioni monolitiche . . . . . . . . . . . . . . . . . . . 66
4 Il prototipo delle sospensioni monolitiche e il sistema di test 684.1 Realizzazione di una sospensione monolitica . . . . . . . . . . . . . 68
4.1.1 La produzione delle fibre . . . . . . . . . . . . . . . . . . . . 694.1.2 La caratterizzazione delle fibre . . . . . . . . . . . . . . . . . 714.1.3 Il montaggio delle fibre nel payload . . . . . . . . . . . . . . 76
La marionetta per le sospensioni monolitiche . . . . . . . . . 77Lo specchio per le sospensioni monolitiche . . . . . . . . . . 79
4.2 Apparato sperimentale per i test di controllo . . . . . . . . . . . . . 834.2.1 Sistema di misura della posizione . . . . . . . . . . . . . . . 854.2.2 Sistema di acquisizione ed elaborazione dati . . . . . . . . . 89
I processi e i programmi per il controllo locale . . . . . . . . 924.2.3 Sistema di attuazione . . . . . . . . . . . . . . . . . . . . . . 1014.2.4 Prime operazioni . . . . . . . . . . . . . . . . . . . . . . . . 103
5 Caratterizzazione del prototipo di payload 1085.1 Le funzioni di trasferimento . . . . . . . . . . . . . . . . . . . . . . 110
5.1.1 Esempio di un pendolo semplice . . . . . . . . . . . . . . . . 1125.1.2 Funzione di trasferimento e filtri di controllo . . . . . . . . . 114
5.2 Misure sperimentali . . . . . . . . . . . . . . . . . . . . . . . . . . . 1155.2.1 Fit dei dati sperimentali . . . . . . . . . . . . . . . . . . . . 1215.2.2 Calcolo degli errori . . . . . . . . . . . . . . . . . . . . . . . 130
5.3 Previsione teorica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1355.3.1 Sistemi ad una dimensione . . . . . . . . . . . . . . . . . . . 1385.3.2 Sistemi a due dimensioni . . . . . . . . . . . . . . . . . . . . 1395.3.3 Le funzioni di trasferimento teoriche . . . . . . . . . . . . . 1415.3.4 Confronto con le misure . . . . . . . . . . . . . . . . . . . . 144
5.4 Modifica del progetto della marionetta per Virgo+ . . . . . . . . . . 162
Conclusioni 169
VI

A Concetti fondamentali della teoria della Relatività Generale 171I tensori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171L’equazione delle geodetiche . . . . . . . . . . . . . . . . . . 172Il tensore di curvatura . . . . . . . . . . . . . . . . . . . . . 173
B Schematizzazione meccanica del payload 175
C Listato di configurazione del processo Gx Server 179
D Misure sperimentali delle funzioni di trasferimento 182
Bibliografia 195
VII

M
Introduzione
Lo studio dello spettro elettromagnetico ha consentito di estendere enormemente laconoscenza dell’universo. Nel visibile le informazioni riguardanti gli oggetti astro-fisici osservabili ci hanno permesso di valutare le dimensioni della nostra galassiae di comprendere il ruolo fondamentale della Relatività Generale. Lo sviluppo diulteriori tecnologie ha dato luogo all’indagine del cosmo a lunghezze d’onda diver-se dal visibile: si è così scoperta la radiazione cosmica di fondo nella banda dellemicroonde e più recentemente le forti emissioni impulsive nello spettro dei raggi !che hanno portato alla luce l’esistenza di fenomeni molto energetici. Infine, graziealle osservazioni nella banda radio, si sono potute penetrare le nubi di polveri del-le galassie distanti e vederne il centro, spesso costituito da corpi particolarmentemassivi.
Tuttavia esistono ancora oggetti astrofisici la cui osservazione non è semplicea causa della loro bassa luminosità e delle loro ridotte dimensioni: questi corpicelesti, che si possono formare nelle fasi finali dell’evoluzione stellare, sono buchineri, stelle di neutroni e nane bianche. Per le loro proprietà sono rilevabili tramitel’emissione di onde elettromagnetiche solo nelle vicinanze della Terra.
A questo scopo si potrebbe utilizzare la radiazione gravitazionale. Le ondegravitazionali, previste dalla Teoria della Relatività Generale, sono emesse da tuttii corpi aventi una distribuzione di massa asimmetrica o variabile; ma a causa dellaloro bassa intensità dovrebbero essere rilevabili solo nel caso in cui le masse ingioco sono dell’ordine di quelle stellari.
Nel corso degli anni si sono sviluppati diversi strumenti per la misura del se-gnale gravitazionale: dalle prime barre risonanti ( J. Weber, 1960) fino agli inter-ferometri, si continua a migliorare la sensibilità degli apparati di queste onde e asviluppare rivelatori sempre più sofisticati.
Gli interferometri attualmente in funzione sono sei: GEO600, nato dalla col-laborazione anglo-tedesca, TAMA, lo strumento giapponese, i tre LIGO, posti indue località diverse degli Stati Uniti e infine Virgo, il rivelatore italo-francese. Percome sono costruiti e per la sensibilità raggiunta gli interferometri riuscirebbero amisurare solo i segnali gravitazionali di determinate sorgenti. Per ogni tipo di sor-gente esiste una distanza massima di rilevazione che al momento include il GruppoLocale.
Per poter rivelare un su"ciente numero di eventi di emissione gravitazionale ènecessario un ulteriore sviluppo tecnologico. Allo stato attuale, l’obiettivo fonda-
IX
mentale, a cui si è già molto vicini, è il raggiungimento di una sensibilità tale dapermettere l’osservazione di alcuni eventi all’anno, ovvero incrementare il raggiodi rivelazione fino all’ammasso della Vergine. A tale scopo, sono stati progettatidei miglioramenti per Virgo da attuare in quattro anni che prendono il nome diVirgo+ e VirgoAdvanced. Grazie a queste modifiche si guadagnerà un ordine digrandezza in più su tutte le frequenze della banda di rivelazione.
In particolare, il contributo del rumore termico delle sospensioni degli specchipresenti nell’interferometro sarà ridotto tramite una nuova sospensione realizzatacon fibre di silice fusa. Essa sarà realizzata con fili, attacchi e specchi integralmentecostituiti dallo stesso materiale in modo da formare un blocco monolitico e ridurrecosì la dissipazione termoelastica e quella meccanica dovuta alle frizioni interne.
Prima di montare le sospensioni monolitiche nell’interferometro è necessariostudiare la fattibilità in termini di assemblaggio e robustezza per mezzo di unapposito prototipo. In questo lavoro ci siamo occupati della caratterizzazione edella risposta del sistema sottoposto al controllo di posizione. Il prototipo, assem-blato in un laboratorio situato presso il sito di Virgo (Cascina, Pisa), è utile perverificare la robustezza delle fibre e per attuare uno studio preliminare del lorocomportamento in condizioni di lavoro ordinarie.
Nel primo capitolo deriviamo dalle equazioni della Relatività Generale le ondegravitazionali. Sono quindi analizzate le loro proprietà, la loro interazione con lamateria e le principali sorgenti di onde gravitazionali rilevabili con l’interferometroVirgo.
Nel secondo capitolo è descritto come misurare le onde gravitazionali trami-te uno strumento interferometrico, descrivendo la configurazione base di questorivelatore e i rumori in esso presenti. Si porrà particolare attenzione al rumoretermico. Dopo aver parlato delle prime schematizzazioni del moto browniano, èa!rontata la generalizzazione di questo fenomeno ai corpi solidi grazie al Teore-ma Fluttuazione-Dissipazione focalizzando la trattazione al caso della sospensionemeccanica degli specchi. Infine accenniamo ad un interferometro di futura genera-zione ancora in fase di progettazione (LISA) che, situato nello spazio, rappresental’unica alternativa sostanziale rispetto agli interferometri terrestri.
Nel terzo capitolo descriviamo Virgo nel dettaglio, discutendo la curva di sen-sibilità teorica e quella misurata e ponendo particolare attenzione all’ultimo stadiodelle sospensioni, il payload, molto simile al prototipo da noi studiato. Successiva-mente elencheremo le modifiche più importanti che si ha intenzione di attuare perVirgoAdvanced.
Nel quarto capitolo è a!rontata la problematica della produzione e della carat-terizzazione delle fibre di silice fusa e si descrive come si assembla una sospensionemonolitica. Si analizza, dunque, il sistema di controllo locale del prototipo di pay-load costituito dalla strumentazione di misura della posizione dello specchio, dalsistema di acquisizione ed elaborazione dati e da quello di attuazione.
Parallelamente alla caratterizzazione della risposta meccanica del prototipo do-
X

tato di fibre in silice fusa è stato possibile progettare alcuni miglioramenti delpayload per Virgo+, fondati sull’esperienza acquisita tramite il funzionamentodell’interferometro Virgo.
Nel quinto capitolo sono riportati i dati sperimentali delle misure delle funzionidi trasferimento meccaniche del sistema nei diversi gradi di libertà in quattroconfigurazioni, distinguibili dal tipo di fili di sospensione e dalla posizione delcentro di massa del sistema. Vengono poi confrontate le misure sperimentali conle funzioni di trasferimento teoriche, calcolate tramite il metodo delle matrici ditrasferimento da punto a punto.
XI

M
Capitolo 1
Le Onde Gravitazionali
L’esistenza delle onde gravitazionali è prevista dalla teoria della Relatività Gene-rale di Einstein (1916).
In questo capitolo introdurremo i concetti fondamentali della teoria e del calcolotensoriale. Vedremo poi come si ricava l’equazione delle onde dalla linearizzazionedelle Equazioni di Einstein nell’approssimazione di campo debole. Infine sarannobrevemente descritte le possibili sorgenti di onde gravitazionali.
1.1 La teoria della Relatività GeneraleLa teoria della relativià generale riformula la gravitazione di Newton. Infatti, conl’introduzione delle trasformazioni di Lorentz, nell’accezione prevista dalla Rela-tività Ristretta, le equazioni di Newton della meccanica non risultavano più inva-rianti, mentre le equazioni di Maxwell per l’elettromagnetismo non presentavanoproblemi. Einstein si propose di risolvere questa discrepanza proponendo un nuovoformalismo.
La Relatività Generale si basa su un fondamentale principio di simmetria, ilPrincipio di Equivalenza, che stabilisce un legame tra il campo gravitazionale e lageometria dello spazio-tempo. Esistono due diverse formulazioni di questo prin-cipio a seconda che si riferisca solo alle leggi della gravitazione o a tutte le leggidella fisica:
• principio di equivalenza debole: in un campo gravitazionale arbitrario, datoun punto dello spazio-tempo, è possibile scegliere un sistema di riferimentoinerziale tale che, in un intorno relativamente piccolo del punto, le leggi delmoto di un corpo in caduta libera assumono la forma dettata dalla teoriadella Relatività Speciale.
• principio di equivalenza forte: il principio di equivalenza debole vale pertutte le leggi della fisica, non solo quelle che non coinvolgono l’interazionegravitazionale.
1
Con la prima definizione stiamo a!ermando che un campo gravitazionale arbi-trario, in un intorno su"cientemente piccolo di un dato punto dello spazio-tempo,non è distinguibile da un campo di forze apparenti dovute alla scelta di un sistemadi riferimento non inerziale; quindi tutti i corpi, con la stessa velocità iniziale, simuovono in un campo gravitazionale seguendo la stessa traiettoria, indipendente-mente dalla loro composizione interna. Quest’idea ha come conseguenza direttal’eguaglianza tra massa inerziale mI e massa gravitazionale mG.
Inoltre si è voluto sottolineare la validità locale delle due definizioni: infattiun campo gravitazionale non uniforme, grazie all’esistenza delle forze di marea,è sempre distinguibile da un campo di accelerazione. Perciò solo in un intornosu"cientemente piccolo di un dato punto, valgono questi principi.
Il Principio di Equivalenza è inglobato a sua volta nel Principio di CovarianzaGenerale, la cui espressione richiede l’uso di alcuni concetti caratteristici dellateoria della Geometria di!erenziale degli spazi curvi, come i tensori e simboli diChristo!el [2] (Appendice A).
1.1.1 Le equazioni di EinsteinLa teoria della Relatività Generale riformula la gravitazione newtoniana. Ma nellimite di campo debole le nuove equazioni devono ridursi all’equazione di Poisson,valida nella formulazione classica:
!2! = 4"G# (1.1)
dove ! è il potenziale newtoniano e # è la densità di massa che genera il campo.Ora, nella teoria della Relatività Speciale di Einstein, con la nota espressione:
E = mc2 (1.2)
la massa e l’energia sono proporzionali, due diverse manifestazioni della stessaentità fisica. Quindi non solo la massa, ma anche l’energia è una sorgente delcampo gravitazionale. Occorre trovare un nuovo modo di rappresentare le sorgentidel campo e in particolare serve una rappresentazione tensoriale.
Si definisce così il tensore energia-impulso [2]:
T!" = c2N!
n=1
p!np"
n
En$3("#% ""#%n(t)) (1.3)
dove pµn è il quadrivettore impulso e"#%n(t) è il quadrivettore posizione di una n-esima
particella presente in un sistema generico formato da N particelle non interagenti.Si noti che:
• T 00 rappresenta la densità di energia del sistema, 1cT
0i rappresenta l’energiache fluisce attraverso l’unità di superficie ortogonale all’asse %i nell’unitàdi tempo e T ik rappresenta invece il flusso della i-esima componente deltrivettore impulso attraverso la superficie ortogonale all’asse %i ;
2

• T µ# è un tensore simmetrico; quindi ha solo 10 componenti indipendenti;
• T µ# ha una legge di conservazione:
T µ#;# = 0 (1.4)
In questo modo abbiamo generalizzato la sorgente di un campo gravitazionale.Ci resta da generalizzare anche il potenziale newtoniano.
I simboli di Christo!el(Appendice A), espressi con il tensore metrico gµ# , sonointerpretabili come la forza gravitazionale per unità di massa. Ci si aspetta quindiche il tensore metrico sia associabile in qualche modo al potenziale !. Vediamocome.
Nel caso di un campo gravitazionale debole, stazionario, per cui valga l’appros-simazione v << c, è possibile scrivere il tensore gµ# come la somma tra la metricadi Minkowsky e una piccola perturbazione hµ# :
gµ# = &µ# + hµ# con |hµ# | << 1 (1.5)
Sostituendo questa espressione nell’equazione delle geodetiche eq. A.11 e con-siderando solo i termini di primo ordine in hµ# si ottiene:
d2x!
d' 2=
1
2!h00 (1.6)
Si noti che resta solo il termine h00 in quanto v << c e si ha dxi << cdt $ dx0;per cui il simbolo di Christo!el dominante è "!
00.L’eq. 1.6 appena trovata deve ridursi all’equazione newtoniana:
d2x!
d' 2= "!! (1.7)
dunque, dal confronto tra l’eq. 1.6 e l’eq. 1.7 si ha:
h00 = "2!
c2"# g00 = "(1 + 2
!
c2) (1.8)
In questo modo si è determinato il collegamento tra il potenziale gravita-zionale e la metrica dello spazio-tempo. Possiamo sostituire le quantità trovatenell’equazione di Poisson eq. 1.1 e ottenere:
!2g00 = "8"G
c4T00 (1.9)
Questa equazione non è ancora invariante per trasformazioni di Lorentz, ma sesi ha una distribuzione di energia e materia arbitraria, si può costruire un tensorepartendo da gµ# e le sue derivate che prende nome di tensore di Einstein Gµ# . L’eq.1.9 diventa:
Gµ# = "8"G
c4Tµ# (1.10)
Bisogna capire a cosa equivale il tensore di Einstein. Per farlo serviamocidelle caratteristiche del tensore energia-impulso: infatti, dato che Gµ# è ad essoproporzionale, deve godere delle stesse proprietà. Allora Gµ# :
3

1. deve essere un tensore simmetrico
2. deve essere lineare nelle derivate seconde e deve contenere i prodotti dellederivate prime del tensore gµ#
3. deve soddisfare la legge di conservazione:
Gµ#;# = 0 (1.11)
Il tensore di Riemann (Appendice A) ha la struttura cercata e in particolareil tensore di Ricci e lo scalare di Ricci (moltiplicato per il tensore metrico), chederivano da esso, hanno il giusto numero di indici. Il tensore di Einstein sarà unacombinazione lineare di queste due quantità:
Gµ# = c1Rµ# + c2gµ#R (1.12)
Impondendo le condizioni scritte sopra, si ottiene:
Gµ# = Rµ# "1
2gµ#R (1.13)
che insieme all’eq. 1.10 compone le equazioni di Einstein.L’incognita nelle equazioni eq. 1.10 e eq. 1.13 e’ il tensore metrico: una volta
nota la distribuzione delle sorgenti del campo ci si chiede che forma assuma lospazio-tempo. Non e’ facile risolvere queste equazioni non lineari e ci si riesce ana-liticamente solo in casi in cui la distribuzione delle sorgenti presenti una simmetria,come nel caso della soluzione trovata da Schwarzschild [2].
1.2 La soluzione ondulatoria delle equazioni di Ein-stein
È possibile risolvere le equazioni di Einstein realizzando un’opportuna linearizza-zione valida quando si ha un campo debole non stazionario. La non stazionareità èdata dai cambiamenti della sorgente che durino abbastanza a lungo da permetterealla perturbazione di propagarsi attraverso la regione interessata; lontano dallasorgente questa regione può essere considerata vuota, così da poter utilizzare cometensore metrico quello di Minkowsky (Appendice A), senza perdere in generalità.
Per ricavare la soluzione possiamo applicare il metodo perturbativo. Si scriveil tensore metrico come somma di due diversi contributi, la soluzione e!ettiva delleequazioni di Einstein, nel caso considerato &µ# , e la perturbazione hµ# che devesoddisfare la condizione:
|hµ# | << 1 (1.14)
ottenendo:gµ# = &µ# + hµ# (1.15)
4

Anche il tensore energia-impulso sarà dato dalla somma di due contributi, iltermine imperturbato T 0
µ# e la perturbazione Tµ# :
T totµ# = T 0
µ# + Tµ# (1.16)
Sostituendo l’eq. 1.15 e l’eq. 1.16, nelle equazioni di Einstein e considerandosolo i termini di primo ordine nella perturbazione si ottiene:
!hµ# ""
(2h$#
(x$(xµ+
(2h$µ
(x$(x#" (2h$
$
(xµ(x#
#
= "16"G
c4(Tµ# "
1
2gµ#T
$$ ) (1.17)
Ogni soluzione delle equazioni di Einstein non è univocamente determinata: in-fatti è sempre possibile eseguire un trasformazione di coordinate e trovare un’altrasoluzione equivalente. Essa corrisponde ad una famiglia di soluzioni relativa ad uncerto sistema di riferimento.
Possiamo quindi scegliere un sistema di coordinate per cui valgano l’eq. 1.14 el’eq. 1.4, che si traduce nella condizione di gauge armonica:
gµ#"%µ# = 0 (1.18)
Dalle approssimazioni eq. 1.14 e eq. 1.15 è possibile semplificare il termine traparentesi a primo membro dell’eq. 1.17 e si ottiene:
$!hµ# = "16&G
c4 (Tµ# " 12gµ#T $
$ )'hµ
!'xµ = 1
2'h"
"
'x!
(1.19)
Introducendo il tensore:
hµ# $ hµ# "1
2gµ#h
(( (1.20)
si ha: $!hµ# = "16&G
c4 Tµ#'h
µ!
'xµ = 0(1.21)
e ricordando che siamo nel vuoto, lontani dalla sorgente, per cui Tµ# = 0:$
!hµ# = 0'h
µ!
'xµ = 0(1.22)
Questa è la nota equazione di!erenziale delle onde: così abbiamo dimostrato cheuna perturbazione della metrica si propaga e!ettivamente come un’onda. Graziealla doppia natura del tensore metrico, come indicatore della forma dello spazio-tempo e come potenziale gravitazionale, le perturbazioni della metrica sono ancheperturbazioni gravitazionali.
5

1.2.1 ProprietàLa soluzione più semplice alle eq. 1.22 è un’onda piana monocromatica:
h!" = %%A!"eik"x"
&(1.23)
dove A!" è il tensore di polarizzazione e k% è il vettore d’onda. Ovviamente siamointeressati solo alla parte reale di questa quantità.
Possiamo vedere di quali proprietà godono le onde gravitazionali:
• si propagano alla velocità della luce. Infatti se si sostituisce l’eq. 1.23 nell’eq.1.22 si trova:
&!"k!k" = 0 (1.24)
che è soddisfatta solo se k! è un vettore nullo, cioè di tipo luce1.
• sono onde trasversali. Ciò si dimostra sostituendo l’eq. 1.23 nella gaugearmonica, ottenendo:
(hµ$
(xµ= 0
&µ! (h!$
(xµ= 0
&µ! (
(xµA!$e
ik"x"= 0
&µ!A!$kµ = 0
A$!kµ = 0 (1.25)
equazione verificata se il vettore d’onda e il tensore di polarizzazione sonoortogonali tra loro, cioè se l’onda è appunto trasversale.
• hanno soltanto due possibili stati di polarizzazione. Il tensore di polarizza-zione deve rispettare alcune condizioni: deve essere un tensore simmetrico(dato che il campo è descritto con un tensore simmetrico) e deve rispettarela gauge armonica. Ne consegue che dei sedici elementi che formerebbero iltensore Aµ# , solo 4 sono non nulli [1]:
Aµ# =
'
((()
0 0 0 00 Axx Axy 00 Axy "Axx 00 0 0 0
*
+++, (1.26)
1Un vettore nullo è un vettore il cui modulo quadro è nullo, pur non avendo tutte le singolecomponenti nulle.
6
Usualmente si pone:Axx = A+ Axy = A! (1.27)
corrispondenti a due diverse polarizzazioni, che prendono nome di polariz-zazione & e polarizzazione +. Approfondiremo nel prossimo paragrafo cosarappresentano queste due polarizzazioni.
1.2.2 Interazione con la materiaDopo aver menzionato alcune proprietà delle onde gravitazionali, possiamo analiz-zare come esse interagiscono con la materia e in particolare come si comporta unsistema di punti materiali giacenti nello spazio, attraversato da un’onda.
La perturbazione della metrica causata da un’onda gravitazionale non alterala posizione di un punto materiale o di una massa di prova in un dato sistemadi riferimento. Si può invece dimostrare che il passaggio dell’onda fa variare ladistanza tra due corpi presenti nella regione interessata.
Infatti partendo dall’equazione delle geodetiche eq. A.11 e inserendo la per-turbazione data da un’onda si otterrà che l’accelerazione d2x#
d)2 della particellaconsiderata è nulla, ovvero che il corpo non cambia il suo stato di moto.
Per osservare gli e!etti di un’onda gravitazionale, allora, non basta un solo pun-to materiale ma ne servono almeno due. Prendiamo due particelle vicine, inizial-mente in quiete, poste lungo l’asse x delle coordinate, in un punto A, coincidentecon l’origine del sistema e in un punto B pari a x = ).
La distanza tra le due particelle, in questo sistema di coordinate, è dato dalladistanza propria:
#LAB =-|ds2|1/2
=-|gµ#dxµdx# |1/2
=- *
0|gxx|1/2dx
' |gxx(x = 0)|1/2 ) ' [1 +1
2hxx(x = 0)] ) (1.28)
Dal momento che hxx, la perturbazione calcolata dalla componente Axx deltensore di polarizzazione, è diversa da zero, la distanza propria #lAB cambia neltempo.
Un approccio più formale al problema concerne l’utilizzo dell’equazione delladeviazione geodetica, che a partire dall’equazione delle geodetiche eq. A.11, calcolacome due curve inizialmente parallele variano la loro distanza reciproca in unospazio-tempo generico, in cui non è assicurata la validità del quinto postulato diEuclide. Riportiamo qui i risultati trovati, senza ricavarle esplicitamente:
1. per due particelle inizialmente separate di ) lungo l’asse x si trova:(2
(t2%x =
1
2)
(2
(t2hxx
(2
(t2%y =
1
2)
(2
(t2hxy (1.29)
7
2. per due particelle inizialmente separate di ) lungo l’asse y invece si trova:
(2
(t2%y = "1
2)
(2
(t2hxx
(2
(t2%x =
1
2)
(2
(t2hxy (1.30)
Queste equazioni ci permettono di capire la polarizzazione delle onde gravita-zionali.
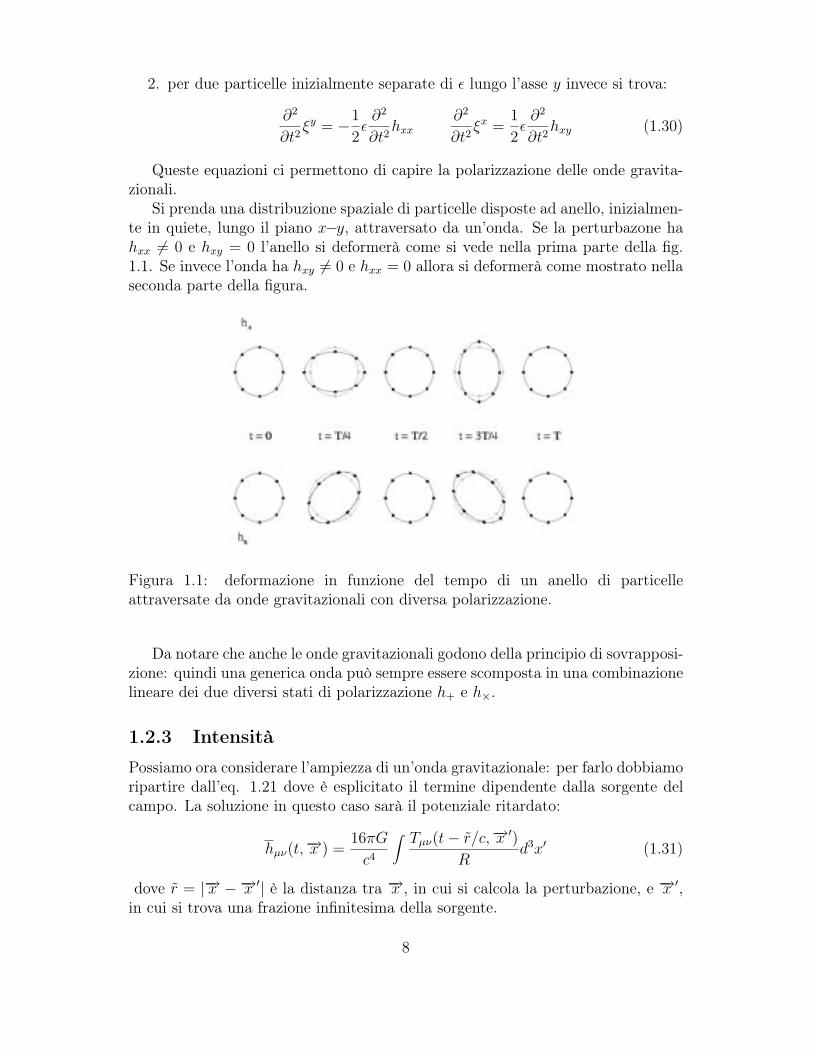
Si prenda una distribuzione spaziale di particelle disposte ad anello, inizialmen-te in quiete, lungo il piano x"y, attraversato da un’onda. Se la perturbazone hahxx (= 0 e hxy = 0 l’anello si deformerà come si vede nella prima parte della fig.1.1. Se invece l’onda ha hxy (= 0 e hxx = 0 allora si deformerà come mostrato nellaseconda parte della figura.
Figura 1.1: deformazione in funzione del tempo di un anello di particelleattraversate da onde gravitazionali con diversa polarizzazione.
Da notare che anche le onde gravitazionali godono della principio di sovrapposi-zione: quindi una generica onda può sempre essere scomposta in una combinazionelineare dei due diversi stati di polarizzazione h+ e h!.
1.2.3 IntensitàPossiamo ora considerare l’ampiezza di un’onda gravitazionale: per farlo dobbiamoripartire dall’eq. 1.21 dove è esplicitato il termine dipendente dalla sorgente delcampo. La soluzione in questo caso sarà il potenziale ritardato:
hµ#(t,"#x ) =16"G
c4
- Tµ#(t" r/c,"#x ")
Rd3x" (1.31)
dove r = |"#x " "#x "| è la distanza tra "#x , in cui si calcola la perturbazione, e "#x ",in cui si trova una frazione infinitesima della sorgente.
8

Se siamo a grande distanza r dalla sorgente, con |"#x | ' r >> |"#x "|, questaespressione si può semplificare:
hµ# '16"G
c4
1
r
-Tµ#(t" r/c,"#x ")d3x" (1.32)
Sfruttando la legge di conservazione eq. 1.4 del tensore energia-impulso si trovache: -
T0µ d"#x " = cost (1.33)
da cui segue la conservazione dell’energia totale e del momento del sistema. Allorale componenti della perturbazione h0µ non contribuiscono alla creazione del campoe resta solo il termine T00 che nell’approssimazione non relativistica è pari a T00 '#c2. Ora, dato che in un sistema legato vale il teorema del viriale, scritto in formatensoriale:
2c2-
Tµ#d3 =
(2
(t2
-T00x
µx#d3x (1.34)
possiamo sostituire e ottenere:
hµ# '8"G
c4r
(2
(t2
-#("#x ")"#x "
µ"#x "
#d3x (1.35)
L’integrando si può scrivere come il momento di quadrupolo per un sistema dimasse, definito:
Qµ# =-
(3x"µx"# " r2$µ#)#("#x ")d3x" (1.36)
Possiamo trascurare il termine dato dalla delta di Kronecker, non corrispon-dente alle due polarizzazioni trovate, e riscrivere:
hµ#(t,"#x ) ' 8"G
3c4rQµ# (1.37)
Allora l’intensità delle onde gravitazionali dipende dal momento di quadrupo-lo che descrive la distribuzione di masse della sorgente. È da notare che nessuncontributo viene dal termine di monopolo o di dipolo: difatti la sorgente di mo-nopolo deriva dalla massa-energia totale del sistema, che si conserva, mentre lasorgente di dipolo è legata al centro di massa del sistema, che a sua volta nonvaria il suo stato di moto se il sistema è isolato, per la conservazione del momentoangolare [3]. Questo si ricollega al Teorema di Birkho!: la soluzione di Schwarz-schild è l’unica soluzione possibile a simmetria sferica e asintoticamente piatta.Ciò comporta che un qualunque sistema simmetricamente sferico non emette ra-diazione gravitazionale, come analogalmente non si ha emissione da un monopoloelettromagnetico.
9

Volendo fare una valutazione per ordini di grandezza dell’ampiezza delle onde,possiamo approssimare il momento di quadrupolo:
Q )MR2 "# Q ) MR2
T 2(1.38)
dove M è la massa totale del sistema, R il raggio tipico e T il tempo caratteristicodi variazione nella distribuzione delle masse. Dato che v = R/T è la velocità concui si muovono le masse all’intero del sistema, si ottiene:
h ) 1
r
GM
c2
.v
c
/2
(1.39)
Da questa formula si stima il valore del segnale gravitazionale: il rapporto trale costanti G/c2 ) 10#29m3/s4Kg è talmente esiguo che solo se sono in gioco masseeccezionalmente elevate (come quelle dei corpi celesti) oppure velocità relativisticheè possibile considerare la rilevazione delle onde gravitazionali.
1.3 Le sorgenti di onde gravitazionaliCi sono diverse sorgenti astronomiche che emettono onde gravitazionali. Per clas-sificarle possiamo avvalerci di vari metodi, a seconda della natura dell’oggetto, deltipo di segnale, dell’intensià della radiazione o della sua frequenza.
Facciamo una classificazione in base a quest’ultimo parametro:
• frequenze estrememante basse (10#18 " 10#13Hz):
– sorgenti stocastiche (fluttuazioni gravitazionali primordiali amplificatedalla fase di espansione inflazionaria dell’universo);
• frequenze molto basse (10#9 " 10#7Hz):
– sorgenti stocastiche (fluttuazioni gravitazionali dovute alla rottura dellesimmetrie delle interazioni fondamentali avvenuta nelle prime fasi divita dell’universo);
• frequenze basse (10#5 " 1 Hz):
– sistemi binari formati da oggetti compatti (nane bianche, stelle di neu-troni, buchi neri);
– fase di coalescenza di binarie formate da buchi neri massicci;– fondo stocastico (commistione di sorgenti astrofisiche e primordiali, già
descritte);
• frequenze alte (1" 104Hz):
10
– coalescenza di stelle binarie formate da oggetti compatti;– stelle di neutroni rotanti;– eventi esplosivi come collassi stellari, gamma-ray burst e supernovae;– fondo stocastico previsto da diversi meccanismi a seconda del modello
cosmologico scelto, come la teoria delle stringhe o il modello inflaziona-rio.
A questo punto possiamo trattare più approfonditamente alcuni tipi di sorgenti.
1.3.1 Stelle di neutroni rotantiUna stella di neutroni è un oggetto compatto ad alta densità in cui le reazioni ditermofusione nucleare tipiche dei nuclei stellari non avvengono più; solo le stellecon massa iniziale compresa tra 10M$ e 80M$ terminano la loro evoluzione inquesto modo (per masse inferiori si genera una nana bianca, mentre per massesuperiori un buco nero).
In generale, a causa della loro bassa emissione luminosa, sono oggetti pocovisibili se non nelle vicinanze della Terra. Diventano invece facilmente rivelabiliquando sono delle pulsar, cioè quando emettono radiazione elettromagnetica nellabanda radio tramite una sequenza di impulsi con una frequenza pari a quella dirotazione. La maggior parte delle stelle di neutroni sono conosciute sotto formadi pulsar ma si prospetta che esistano anche stelle elettromagneticamente quiete,quindi non osservabili. Allora diventa fondamentale la rivelazione di onde gravita-zionali da sorgenti di questo tipo, per poter supplire alla mancanza di altre formedi emissione.
Le stelle di neutroni rotanti emettono onde gravitazionali continue, periodiche emonocromatiche ad una frequenza doppia rispetto a quella di rotazione attraversodiversi processi che portano alla variazione temporale del momento di quadrupolodella loro massa:
• il campo magnetico può portare la stella a ruotare attorno ad un asse di!e-rente dal suo asse di simmetria;
• la crosta della stella può presentare delle disomogeneità;
• l’eventuale disco di accrescimento presente può avere un asse di simmetrianon necessariamente allineato con quello della stella;
• il fluido che costituisce la struttura interna della stella può causare delleasimmetrie.
L’intensità delle onde gravitazionali dipende allora fortemente dal grado diasimmetria della pulsar, che si parametrizza con *:
h ) I+2*
d(1.40)
11
dove I è il momento d’inerzia del corpo, d la sua distanza dall’osservatore e + lafrequenza a cui emette [14].
Le onde gravitazionali emesse dalle stelle di neutroni, per le loro caratteristiche,permettono di ricavare il segnale dall’analisi della funzione di autocorrelazione: inquesto modo si ha l’indipendenza dalla rivelazione in coincidenza con altri stru-menti, il che rende tali sorgenti interessanti. C’è da notare però che, nonostantele pulsar emettano ad una frequenza bene stabilita, l’e!etto Doppler dato dai mo-vimenti di rotazione e rivoluzione della Terra nello spazio va calcolato in tutte ledirezioni: ciò rende la ricerca di questo tipo di segnale onerosa dal punto di vistacomputazionale, per l’allungamento nei tempi di elaborazione.
Si può calcolare il tasso di eventi aspettati, cioè il numero di onde gravitazionaliche si preveda provenire da questa sorgente nell’unità di tempo. Questo datodipende dalla frequenza con cui si generano le stelle di neutroni, ma dipende anchedal volume di universo in cui si cercano questi eventi, quindi dalla capacità dirivelazione dello strumento di misura. Qui e in seguito riporteremo i tassi dieventi calcolati per l’interferometro VIRGO, in configurazione avanzata, descrittonel Capitolo 3. Per quanto riguarda, le stelle di neutroni, fino ad oggi si conosconocirca 2000 pulsar nei dintorni della Terra () 1kpc), ma si stima che nello stessovolume ci siano 105 stelle quiete.
1.3.2 Sistemi binari coalescentiLe stelle tendono a presentarsi in gruppi anzichè singolarmente, formando un unicocomplesso cinematico (con la stessa velocità) e fisico (con la stessa età e composi-zione chimica). Questo dipende sostanzialmente dalla loro formazione, in quantoprovengono dalla frammentazione della stessa nube progenitrice.
Nel caso più semplice le stelle si trovano in sistemi binari, costituiti da duecorpi molto vicini tra loro, rispetto agli altri astri circostanti, legati l’uno all’al-tro dall’interazione gravitazionale. L’evoluzione del sistema è caratterizzato dallamassa di ciascuna delle stelle e dalla di!erenza tra le masse stesse (la stella conmaggiore massa evolverà prima della compagna): si possono avere sistemi che pro-ducono eventi molto diversi tra loro come le novae, le sorgenti X, le stelle di tipoWolf-Rayet [4, 5].
L’emissione di onde gravitazionali riguarda le stelle doppie nelle fasi finali dellaloro vita, quando entrambe le componenti sono uscite fuori dalla Sequenza Prin-cipale e sono divenute oggetti compatti, come stelle di neutroni (NS) o buchineri (BH). Allora ha inizio la coalescenza che si divide generalmente in tre sta-di, ben identificabili in base al tipo di segnale gravitazionale emesso, periodico osemi-periodico (fig. 1.2):
1. inspiral o spiraleggiamento: il raggio delle orbite delle due componenti siriduce adiabaticamente, le stelle si avvicinano sempre più emettendo on-de gravitazionali. Il segnale è modellizzato con l’espansione post-newtoniana(formalismo che approssima le equazioni di Einstein sviluppando i coe"cienti
12
della metrica e la velocità dei corpi): in questa fase, dato che l’orbita si re-stringe, la frequenza di emissione e l’ampiezza delle onde aumenta, generandoil chirp (fig. 1.3).
2. merger : i due oggetti compatti collidono e si fondono, creando un nuovocorpo. Il segnale in questa fase è stato recentemente studiato con i metodidella Relatività numerica [6].
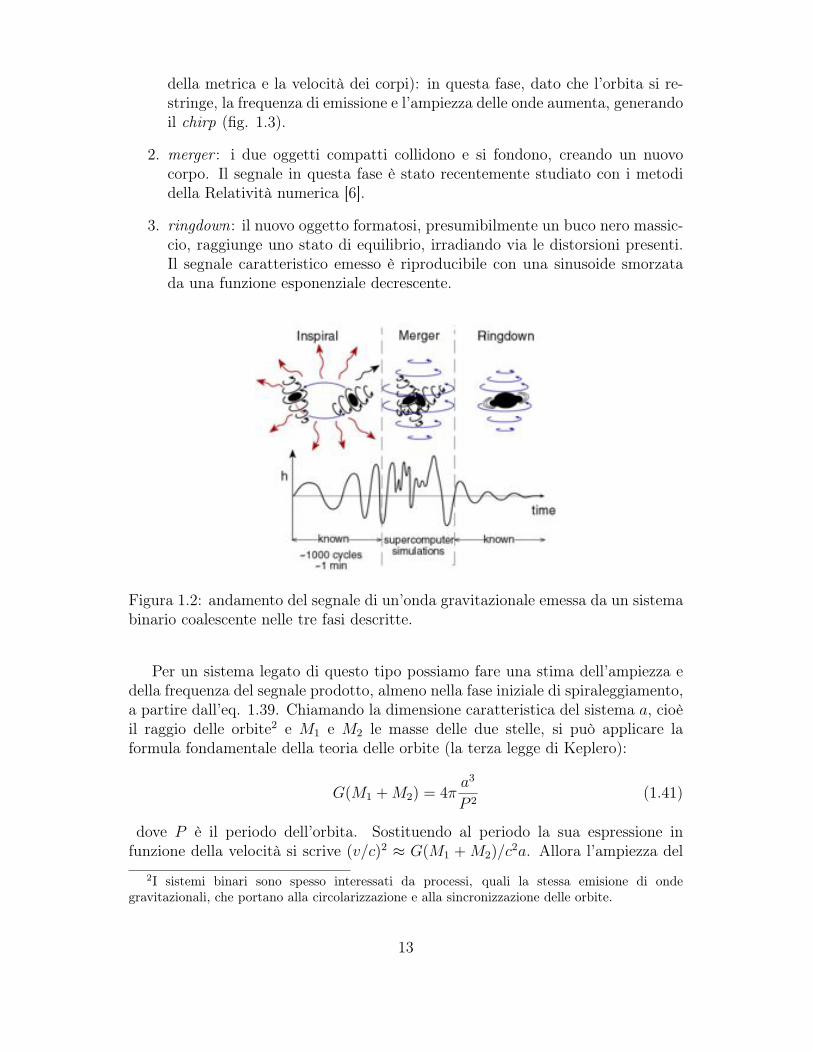
3. ringdown: il nuovo oggetto formatosi, presumibilmente un buco nero massic-cio, raggiunge uno stato di equilibrio, irradiando via le distorsioni presenti.Il segnale caratteristico emesso è riproducibile con una sinusoide smorzatada una funzione esponenziale decrescente.
Figura 1.2: andamento del segnale di un’onda gravitazionale emessa da un sistemabinario coalescente nelle tre fasi descritte.
Per un sistema legato di questo tipo possiamo fare una stima dell’ampiezza edella frequenza del segnale prodotto, almeno nella fase iniziale di spiraleggiamento,a partire dall’eq. 1.39. Chiamando la dimensione caratteristica del sistema a, cioèil raggio delle orbite2 e M1 e M2 le masse delle due stelle, si può applicare laformula fondamentale della teoria delle orbite (la terza legge di Keplero):
G(M1 + M2) = 4"a3
P 2(1.41)
dove P è il periodo dell’orbita. Sostituendo al periodo la sua espressione infunzione della velocità si scrive (v/c)2 ' G(M1 + M2)/c2a. Allora l’ampiezza del
2I sistemi binari sono spesso interessati da processi, quali la stessa emisione di ondegravitazionali, che portano alla circolarizzazione e alla sincronizzazione delle orbite.
13
segnale, mediato sul periodo orbitale e sull’inclinazione dell’orbita è [13]:
h =0
< h2+ > + < h2
! > =.
32
5
/1/2 1
r
G5/3
c4
M1M2
(M1 + M2)1/3("f)2/3 (1.42)
e la frequenza di emissione è:
f =1
"
1G(M1 + M2)
a3
21/2
(1.43)
Si noti che l’ampiezza h dipende da una particolare combinazione delle massedetta massa del chirp M:
M =(M1M2)3/5
(M1 + M2)1/5(1.44)
cosicchè l’eq. 1.42 si possa riscrivere come:
h ) 1
rM5/3f 2/3 (1.45)
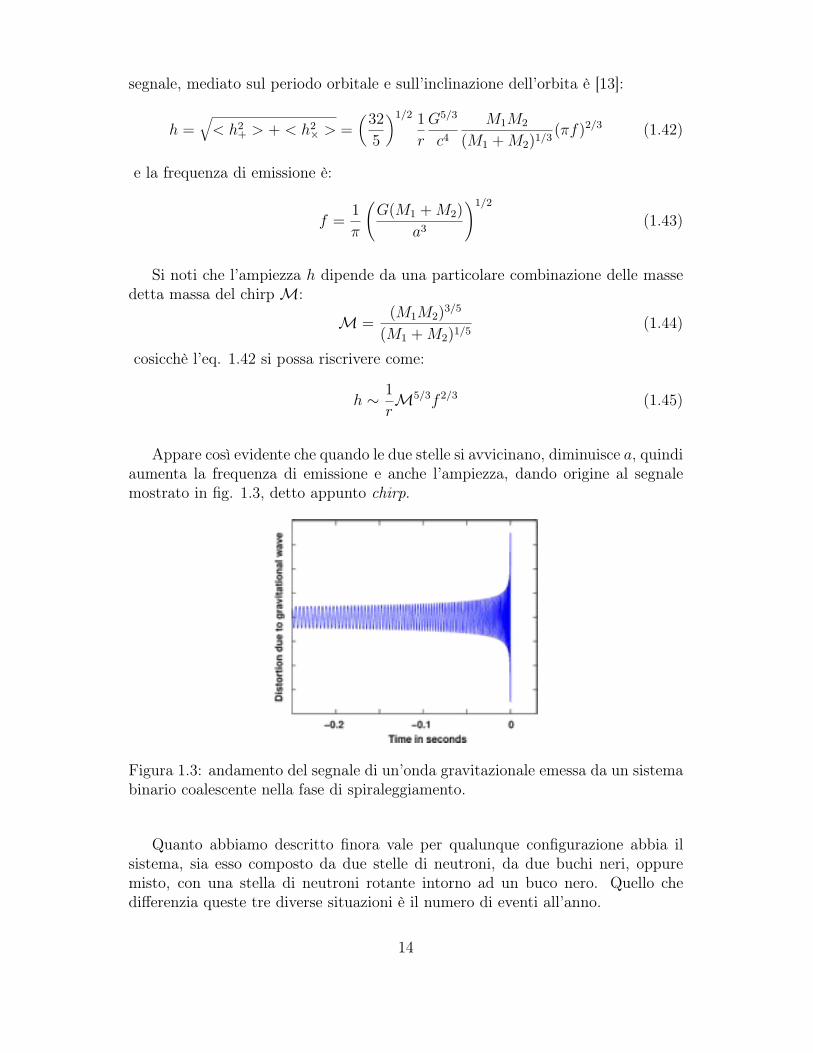
Appare così evidente che quando le due stelle si avvicinano, diminuisce a, quindiaumenta la frequenza di emissione e anche l’ampiezza, dando origine al segnalemostrato in fig. 1.3, detto appunto chirp.
Figura 1.3: andamento del segnale di un’onda gravitazionale emessa da un sistemabinario coalescente nella fase di spiraleggiamento.
Quanto abbiamo descritto finora vale per qualunque configurazione abbia ilsistema, sia esso composto da due stelle di neutroni, da due buchi neri, oppuremisto, con una stella di neutroni rotante intorno ad un buco nero. Quello chedi!erenzia queste tre diverse situazioni è il numero di eventi all’anno.
14
Stella di neutroni - Stella di neutroni
L’esistenza di sistemi così composti è attestata da numerose osservazioni, tra cuila famosa PSR1913+16, studiata da Hulse e Taylor.
L’osservazione di onde gravitazionali da questi sistemi ci permette di avereinformazioni sulla struttura e sull’equazione di stato delle stelle di neutroni esoprattutto sui parametri orbitali e sulla massa del buco nero che si dovrebbeformare.
Esistono due metodi diversi per stimare il tasso di eventi: il primo metodo èempirico e si basa sulle osservazioni di sistemi di questo tipo; il secondo è inveceteorico e si basa sulla sintesi di popolazioni stellari [5], cioè la stima di quantitàintegrate, come la magnitudine, lo spettro, l’indice di colore di un certo gruppo distelle a partire dalla funzione iniziale di massa (o di luminosità) e dalle equazioniche descrivono la struttura stellare.
Per valutare il tasso di eventi con il primo metodo si calcola la frazione dii sistemi binari costituiti da pulsar, osservabili tramite la controparte elettro-magnetica, che entreranno secondo i modelli nella fase di coalescenza in tempi-scala paragonabili con l’età dell’universo. Si trova [7] un tasso di eventi pari aRemp ) 3 " 109 Myr#1MWEG#1, tenendo conto che i sistemi binari osservatiin una galassia equivalente alla nostra (MWEG, sta per Milky Way EquivalentGalaxy) contengono almeno una pulsar.
Per valutare il tasso di eventi con il secondo metodo, invece, bisogna fare delleipotesi sull’evoluzione delle stelle doppie, sul tasso di formazione stellare e sullemasse delle componenti. Si propongono [8] diversi modelli che portano a valori deltasso di eventi di Rteo ) 7, 6" 101 Myr#1, compatibili con Remp.
Il sistema di pulsar PSR1913+16 rappresenta per ora l’unica prova, indiretta,di emissione di onde gravitazionali.
Hulse e Taylor nel 1973 [9] lo scoprirono mentre eseguivano una survey radio dibinarie con oggetti compatti all’Osservatorio di Arecibo. Trovarono che una pulsardi massa M ) 1, 4M$ presentava una modulazione del periodo P = 59, 03 ms paria P = 8, 63 · 10#18s s#1 tale da far supporre la sua appartenenza ad un sistemabinario, seppure non ci fossero osservazioni della compagna. Ciononostante è statopossibile misurare la curva di velocità della coppia usando l’e!etto Doppler dellerighe dell’unico spettro visibile e ricavare i parametri fondamentali delle orbite,come l’eccentricità e = 0, 615±0, 010 e il semiasse maggiore a sin i = 1, 00±0, 02R$(ovviamente correlato con l’inclinazione dell’orbita i, quantità che non si riesce amisurare direttamente), nonchè la massa della compagna oscura, paragonabile aquella della pulsar nota. Se ne dedusse che anche questa compagna fosse una pulsare che quindi il sistema fosse un buon candidato per la verifica della RelativitàGenerale, dato l’intenso campo gravitazionale prodotto.
Il sistema PSR1913+16 continua tuttora ad essere oggetto di studio [11] con-sentendo un crescente miglioramento nella precisione con cui sono ricostruiti i
15

parametri delle due pulsar. Ad esempio, la variazione del periodo orbitale è statamisurata con notevole accuratezza, come mostrato in fig. 1.4.
Figura 1.4: variazione del periodo orbitale del sistema di pulsar PSR1913+16 inaccordo con quella prevista dall’emissione di onde gravitazionali, rappresentatodalla curva.
La curva teorica è quella prevista per un sistema binario che emette ondegravitazionali. Si può ricavare derivando rispetto al tempo la formula fondamentaledelle orbite eq. 1.41 previa sostituzione dell’espressione per il semiasse dato dallasoluzione del problema dei due corpi relativistico. Si trova:
P = "192"
5c5
.2"G
P
/5/3
(1 +73
24e2)(1 + e2)#7/2M1M2(M1 + M2)
#1/3 (1.46)
da cui è possibile ricavare lo spostamento temporale cumulativo, cioè l’intervallodi tempo impiegato per ritornare alla posizione di periastro, graficato in figura.
16

Buco nero - Buco nero e sistemi misti
Contrariamente ai sistemi sopra descritti, le binarie composte da buchi neri-buchineri o miste sono osservate con maggiore di"coltà. Si calcola, però, che l’emissionedi onde gravitazionali sia molto più intensa e quindi misurabile per sorgenti piùlontane, a causa delle maggiori masse in gioco: in genere una stella di neutroni hamassa ) 1, 4M$, contro le ) 10M$ dei buchi neri.
Per stimare l’ordine di grandezza del tasso di eventi aspettato [13] si procedecome segue. Dalla teoria dell’evoluzione stellare si sa che le progenitrici dellestelle di neutroni hanno tipicamente M > 10M$, mentre per i buchi neri si haM > 80M$. Allora, partendo dalla funzione iniziale di massa data da Salpeter [4]:
dN
dtd(M/M$)*
1M
M$
2#2,35
yr#1 (1.47)
si calcola il rapporto tra il numero di stelle che daranno origine in un sistemabinario ad una stella di neutroni NNS#NS e quello di stelle che daranno originead un buco nero NBH#BH . Questa quantità sarà proporzionale al rapporto tra irispettivi tassi di coalescenza. Integrando sulle masse:
RBH#BH
RNS#NS=
NBH#BH(M > 80M$)
NNS#NS(M > 10M$)=
180M$
10M$
2#1,35
' 0, 06 (1.48)
Ne risulta che il tasso di coalescenze di sistemi BH-BH sono almeno un ordinedi grandezza inferiore a quello di eventi provenienti da stelle di neutroni. In realtàcalcoli più precisi del tasso di eventi, basati sui due metodi accennati prima, ilmetodo empirico e quello teorico, prevedono dei tassi inferiori.
Il metodo empirico dispone, questa volta, di un’unica osservazione che riguardail sistema binario IC10 X1, formato da una stella di tipo Wolf-Rayet molto mas-siccia e presumibilmente un buco nero. Il sistema evolverà come buco nero-buconero e resterà coalescente per qualche miliardo di anni [12].
Il metodo teorico, come prima, parte dai modelli di sintesi di popolazione stel-lare; si trova che il tasso per un sistema BH-BH è diRBH#BH ) 0, 02"0, 03Myr#1,mentre per un sistema misto si ha RBH#NS ) 0, 07" 0, 11Myr#1.
1.3.3 Eventi esplosiviQuesti eventi possono essere causati da varie sorgenti ma sono tutti caratterizzatidall’avere un segnale non periodico, di tipo impulsivo con uno spettro piuttostolargo alle alte frequenze. La transitorietà dell’evento rende necessaria l’osservazionein coincidenza tra vari strumenti.
In questo lavoro distingueremo tra esplosioni di supernova, !-ray burst e soft!-ray reapeter.
17
Le supernovae possono essere di tipo I o di tipo II: la classificazione è fatta inbase alla curva di luce dell’esplosione e in base alla popolazione di appartenenzadella stella progenitrice. Tipicamente le supernovae di tipo I sono stelle di po-polazione II appartenenti a sistemi binari stretti, mentre quelle di tipo II, megliostudiate, sono stelle di popolazione I massicce che si trovano alla fine della lorovita [5].
Per quanto concerne l’emissione di onde gravitazionali, data principalmentedalle supernovae di tipo II, si calcola che la frazione di energia persa #E sottoquesta forma dipenda dalla velocità del collasso e dal suo grado di asimmetria eche non superi i 10#8M$.
L’ampiezza del segnale emesso è:
h ) 2, 7 · 10#20.
#E
Modotc2
/1/21
1kHz
f
21/2 .10Mpc
r
/(1.49)
dove f è la frequenza associata al tempo di collasso.Il tasso di eventi è basso: nella nostra galassia e nel Gruppo Locale si ha meno
di un’esplosione ogni venti anni, mentre in una sfera di raggio pari a 5Mpc, centratasulla Terra, possiamo arrivare a un evento all’anno.
L’esiguità e la limitata conoscenza della forma del segnale emesso rendono que-sto tipo di sorgenti di"cilmente misurabili. Nonostante le di"coltà si può tentaredi lavorare in coincidenza con i rivelatori di neutrini. Infatti si teorizza che duranteil collasso del nucleo della stella super-massiccia, il 99% dell’energia rilasciata vadanella produzione ed emissione di questo tipo di particelle che arriveranno con uncerto ritardo rispetto alle onde gravitazionali a causa della loro massa.
Si noti allora come la misura di onde gravitazionali da supernovae diventi fon-damentale, non solo per la stima della massa dei neutrini, ma anche per il discer-nimento dei meccanismi di esplosione delle stelle.
I !-ray burst (GRB) sono dei flash di raggi gamma che durano da qualchesecondo a qualche minuto e che rilasciano nell’ambiente una quantità di energiapari a 1051#54 erg/s. Si pensa siano connessi:
• al collasso gravitazionale di stelle di tipo Wolf-Rayet molto massicce e inrapida rotazione, collasso che potrebbe portare alla formazione di un buconero circondato da un disco di accrescimento;
• alla coalescenza tra buchi neri e stelle di neutroni.
Il tasso di GRB è di un evento al giorno; considerando che l’emissione di ondegravitazionali avviene due minuti prima e due minuti dopo il raggiungimento delmassimo di raggi gamma, ci si aspetta di rilevare onde gravitazionali da questesorgenti.
I soft !-ray repeater sono delle stelle visibili anche nei raggi X ma che emettonoperiodicamente dei flash di raggi ! a basse frequenza. Si pensa che questo processo
18

sia dovuto ad un intenso campo magnetico generato da una stella di neutroni, la cuicrosta, sollecitata dallo stress magnetico, tende a rompersi e a provocare terremotistellari.
Fino ad oggi si conoscono quattro soft !-ray repeater nella nostra galassia e unnumero confrontabile sarà presente nelle galassie vicine. Ci si aspetta quindi chegli eventi da queste sorgenti sia rivelabile.
1.3.4 Fondo stocasticoIl fondo stocastico è generato da una sovrapposizione a tutte le frequenze e intutte le direzioni di sorgenti astrofisiche e cosmologiche. Il segnale è quindi incoe-rente ed ha bassa intensità, caratteristiche che lo pongono al di sotto della sogliaattuale di rivelazione degli strumenti. Per distinguerlo dal rumore strumentale ènecessario calcolare la correlazione tra il segnale misurato da almeno due rivelatoriindipendenti e sfruttare la sua modulazione data dal moto della Terra all’internodella galassia.
Le sorgenti astrofisiche che producono il fondo si possono dividere in sorgentigalattiche e extragalattiche, distinguibili le une dalle altre grazie alla loro diversadistribuzione spaziale: le sorgenti galattiche, come ad esempio binarie di nanebianche, sono localizzate sul piano galattico, mentre le altre, come ad esempiobuchi neri supermassicci al centro di galassie (nuclei galattici attivi), hanno unadistribuzione uniforme.
Le sorgenti cosmologiche sono dovute a fluttuazioni di materia nelle primissimefasi di vita dell’universo, amplificate dall’espansione inflazionaria [15]. Si verrebbecosì a creare un fondo di emissione gravitazionale del tutto simile a quello che hadato origine alla radiazione a microonde (CMB, cosmic microwave background). Larivelazione del segnale gravitazionale di questo tipo ci permetterebbe di verificarele ipotesi del modello cosmologico e di capire quello che è avvenuto ai tempi dell’eradi Planck, ovvero a 10#43s dal Big Bang.
19
Capitolo 2
Interferometro laser per larivelazione delle onde gravitazionali
Le onde gravitazionali deformano la metrica dello spazio-tempo modificando ladistanza tra gli oggetti. Per misurarle, in linea di principio, basterebbe monitorarela variazione della distanza tra due corpi con un “righello” opportuno che noncambia anch’esso di lunghezza quando è attraversato da un’onda. Come righellosi sceglie la luce che viaggia in un interferometro: la figura d’interferenza che siforma all’uscita di questo strumento dipende infatti dalla distanza tra gli specchiche lo costituiscono. Si riesce così a risalire allo spostamento che hanno subito icorpi a causa del passaggio dell’onda.
In questo capitolo faremo una descrizione dell’interferometro nella sua configu-razione più semplice, quella di Michelson; esporremo il suo principio di funziona-mento e quello che succede quando un’onda gravitazionale lo attraversa. Tratte-remo poi brevemente i rumori che agiscono su questo strumento e le idee utili perlimitarne gli e!etti. Infine daremo una visione d’insieme della nuova generazionedi interferometro, quella nello spazio, con LISA.
2.1 Principio di funzionamento di un interferome-tro
L’interferometro di Michelson e Morley è un sistema ottico costituito da due specchie da un lamina separatrice (o beam splitter, BS) come si può vedere in fig. 2.1.
La sorgente coerente1, generalmente un laser, produce il fascio che è sepa-rato in due da BS: i due fasci risultanti sono inviati verso due specchi distantirispettivamente l1 e l2 (M1 e M2), qui si riflettono e tornano indietro verso il beamsplitter, dove avviene l’interferenza, osservata tramite un fotorivelatore, dalla partesimmetrica a quella d’ingresso.
1È importante che la sorgente sia coerente per poter avere il fenomeno dell’interferenza e chesi abbia una lunghezza di coerenza confrontabile con le dimensioni dell’interferometro.
20
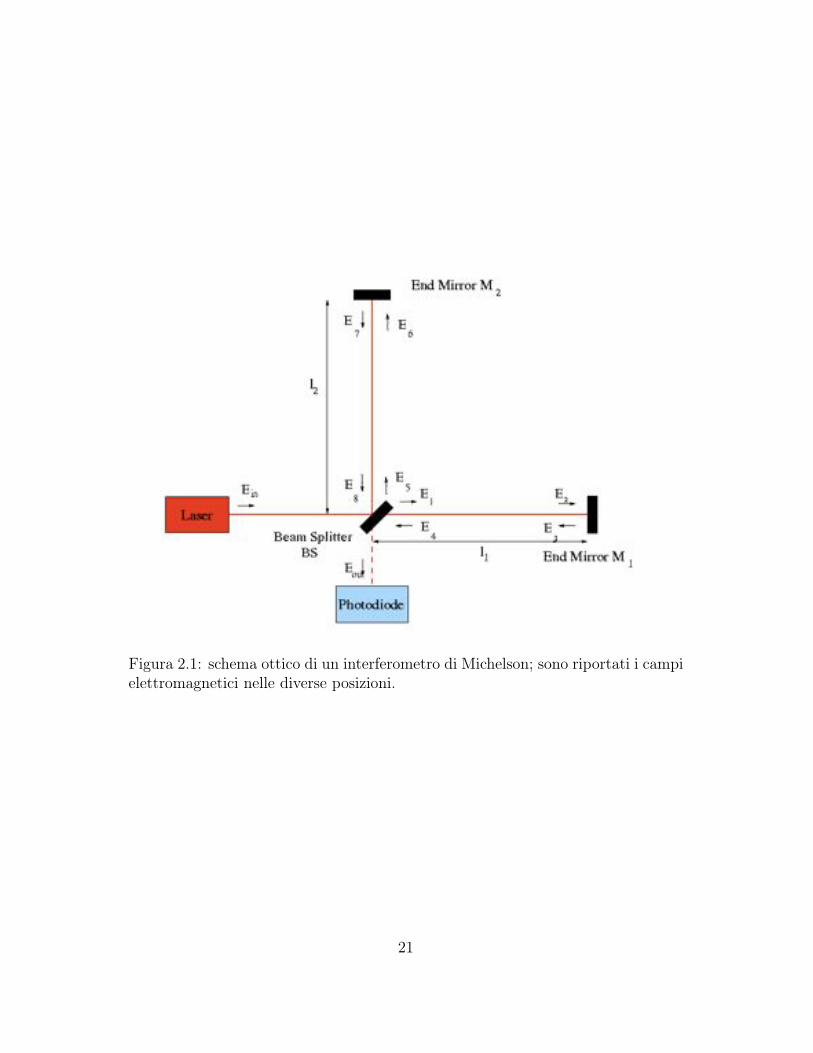
Figura 2.1: schema ottico di un interferometro di Michelson; sono riportati i campielettromagnetici nelle diverse posizioni.
21

Prima di analizzare l’e!etto delle onde gravitazionali sullo strumento, vediamoin che modo si può schematizzare un interferometro calcolando quanto vale lapotenza incidente sul fotodiodo [20].
Chiamiamo Ein il campo elettromagnetico in ingresso allo strumento e Eout
quello in uscita, legato alla grandezza che vogliamo misurare. Il campo può essereapprossimato come un’onda piana di equazione generica:
E = E0 ei("#k L·"#r #+Lt+,L) (2.1)
dove E0 è l’ampiezza dell’onda, kL il vettore d’onda, ,L la pulsazione e -L la faseiniziale. Le altre ampiezze dei campi incidenti o riflessi sulle varie superfici ottichesaranno date dalle seguenti espressioni:
E1 = tBSEin E5 = irBSEin
E2 = e#ikLl1E1 E6 = e#ikLl2E5
E3 = ir1E2 E7 = ir2E6
E4 = e#ikLl1E3 E8 = e#ikLl2E7 (2.2)
dove si è tenuto conto che:
• il campo Eb calcolato a distanza l da un punto in cui ha il valore noto Ea,se non sono presenti altre superfici ottiche, vale Eb = e#ikLlEa;
• il campo trasmesso da uno specchio con trasmessività t vale Eb = tEa;
• il campo riflesso da uno specchio con riflettività r vale Eb = rEa.
Eout è dato dalla somma di E4 e E8 opportunamente ricombinati:
Eout = irBSE4 + tBSE8 (2.3)
La potenza dell’onda misurata dal fotodiodo è data dal quadrato del modulodell’ampiezza del campo incidente:
Pout = |Eout|2 = Pin r2BS t2BS [r2
1 + r22 + 2r1r2cos(2kL#l)] (2.4)
dove #l è pari a:#l = l1 " l2 (2.5)
Appare allora evidente che se questa quantità varia, come avviene in conseguen-za del passaggio di un’onda gravitazionale oppure se si sposta meccanicamente unospecchio, anche l’intensità del fascio in uscita varierà.
22

La di!erenza tra i cammini ottici nei due bracci influenza la fase -L con cui idue fasci di lunghezza d’onda .L si ricompongono al beam splitter :
#-L = 22"
.L#l (2.6)
Si può definire il contrasto C:
C =Pmax
out " Pminout
Pmaxout + Pmin
out(2.7)
Richiamando l’eq. 2.4 e ricostruendo i valori di minimo e massimo di Eout infunzione di #l si ottiene:
C =2r1r2
r21 + r2
2
(2.8)
Allora la potenza del campo in uscita eq. 2.4 si può scrivere come:
Pout = Pin r2BS t2BS (r2
1 + r22)[1 + Ccos(2kL#l)] (2.9)
Il contrasto non dipende solo dai coe"cienti di riflettività, ma indica anchese ci sono dei difetti sulle superfici ottiche: si ricordi, infatti, che la riflettività èlegata alla trasmettività e al fattore di perdita p di uno specchio dalla relazioner2 + t2 + p2 = 1.
In un interferometro ideale si ha che:
• gli specchi hanno la stessa riflettività r1 $ r2 = r;
• gli specchi sono totalmente riflettenti r ) 1, cioè non ci sono perdite di luce;
• il beam splitter trasmette una frazione di luce pari a quella riflessa tBS =
rBS =0
1/2.
In questo caso, allora, il contrasto è pari a C = 1.Mettendo i valori dei coe"cienti r e t corrispondenti e sostituendo l’eq. 2.6 nel-
l’espressione eq. 2.9, in cui si è tenuto conto della definizione del vettore d’onda k =2"/., si trova la potenza Pout misurata dal fotodiodo in uscita dall’interferometro:
Pout =Pin
2[1 + C cos(#-L)] (2.10)
È intuitivo, già a questo livello, che se l’interferenza osservata in uscita è di-struttiva (frangia scura, Pmin
out = 0) è possibile osservare segnali più piccoli conmaggiore facilità. In questo caso si ha:
2kL#l = (2n + 1)" con n + N (2.11)
23

e l’eq. 2.10 si riduce a:Pout =
Pin
2[1 + C] (2.12)
Più avanti, quando parleremo dei rumori di un interferometro e in particolaredello shot noise, vedremo che lo strumento raggiunge la massima sensibilità propriose l’uscita è fissata sulla frangia scura.
2.1.1 E!etto del passaggio di un’onda gravitazionale sull’in-terferometro
Vogliamo ora vedere come lo sfasamento tra i due fasci di luce che percorro-no i bracci dell’interferometro sia legato all’intensità dell’onda gravitazionale intransito.
Prendiamo un interferometro le cui superfici ottiche possano essere consideratein caduta libera, in modo che solo la forza gravitazionale agisca su esse. Questacondizione è verificata dalla sospensione delle ottiche tramite dei pendoli, di ugualefattore di merito, con frequenza di risonanza ,p: se la pulsazione dell’onda gravi-tazionale che attraversa lo strumento è maggiore della frequenza ,p, il pendolo sicomporterà come un filtro passa-basso (sez. 5.1.1) riducendo le perturbazioni adalta frequenza e garantendo in questo maniera anche un isolamento sismico, comevedremo più approfonditamente nella sez. 2.2.1.
Ora, consideriamo un’onda gravitazionale con polarizzazione + orientata comegli assi dell’interferometro, che attraversa lo strumento perpendicolarmente ad essocosicchè la massima deformazione si abbia proprio nelle direzioni degli assi x e y.
La distanza complessiva tra gli specchi è pari a:
#l" = #l + #lGW (2.13)
dove #l è la di!erenza tra le lunghezze dei bracci iniziale definita dall’eq. 2.5,e #lGW è la di!erenza aggiuntiva causata dal passaggio dell’onda stessa, datadall’espressione eq. 1.28. Esplicitiamo l’eq. 2.13 con una prima approssimazione:
l"1 = l1 +1
2hl1 l"2 = l2 "
1
2hl2 (2.14)
Allora si ha:#lGW =
1
2h(l1 + l2) (2.15)
Possiamo sostituire questa espressione nell’eq. 2.13 e ricavare lo sfasamento#-"L dall’eq. 2.6:
#-"L =4"
.L#l" =
4"
.L
3#l +
1
2h(l1 + l2)
4(2.16)
24

Ora riscriviamo l’eq. 2.10:
Pout =Pin
2[1 + C cos(#-L + kLh(l1 + l2))]
=Pin
2{1 + C [cos(#-L) cos(kLh(l1 + l2)) + sin(#-L) sin(kLh(l1 + l2))]}
=Pin
2[1 + C cos(#-L) + CkLh(l1 + l2)) sin(#-L)] (2.17)
dove si è posto cos(kLh(l1 + l2)) ) 1 e sin(kLh(l1 + l2)) ) kLh(l1 + l2), datoche h , 1. La potenza rivelata dal fotodiodo in seguito al passaggio di un’ondagravitazionale è espressa da questa formula.
Possiamo calcolare più in generale la variazione di fase causata dal segnalegravitazionale esprimendo l’eq. 2.13 come segue:
#l" = l"2 " l"1 = (l2 " l1) + (lGW2 " lGW
1 )
= (l2 " l1) +3-
l1(1 +
1
2h) dx"
-
l2(1" 1
2h) dy
4(2.18)
Dato che l’onda viaggia perpendicolarmente al piano individuato dallo stru-mento, vale "#k ·"#r = 0. Allora possiamo semplificare la forma dell’onda di eq. 1.23come:
h = h+ei+t (2.19)
La variazione di cammino ottico lungo l’asse x sarà dunque:
lGW1 =
-
l1(1 +
1
2h+ei+t(x))dx (2.20)
Si noti che:
• l’integrale si può separare in due parti, da 0 a l1, corrispondente al viaggiodi andata verso M1 e da l1 a 0, corrispondente al ritorno, dopo la riflessionesu M1;
• il tempo di percorrenza del fascio di luce dipende dallo spostamento x stesso;prima della riflessione si ha t(x) = x
c + t0, con t0 tempo iniziale della misura,dopo la riflessione t(x) = 2l1+x
c + t0.
Inseriamo questi valori nell’integrale e risolviamolo:
lGW1 =
- l1
0(1 +
1
2h+ei+(x
c +t0))dx"- 0
l1(1 +
1
2h+ei+(
2l1+xc +t0))dx (2.21)
dove il segno meno indica che stiamo procedendo in verso contrario a quellodell’asse x. Si ottiene:
lGW1 = 2l1 +
1
2
h+c
i,ei+t0(ei+
2l1c " 1) (2.22)
25
In modo analogo si ha:
lGW2 = 2l2 "
1
2
h+c
i,ei+t0(ei+
2l2c " 1) (2.23)
Rimettiamo queste quantità nell’eq. 2.18:
#l" = #l + 2#l +1
2
h+c
i,ei+t0(ei+
2l1c + ei+
2l2c " 2) (2.24)
Senza perdere di generalità supponiamo di avere inizialmente i due bracci dellostrumento uguali, per cui l1 = l2 = l0:
#l" =1
2
h+c
i,ei+t02(ei+
2l0c " 1) (2.25)
Moltiplicando e dividendo per e#i+2l0c si ha:
#l" =h+c
,ei+(t0# l0
c ) sin(,l0c
) (2.26)
che possiamo riscrivere come:
#l" = h+l0ei+(t0# l0
c ) sin(+l0c )
+l0c
(2.27)
Ricordiamo che la di!erenza tra i cammini ottici è proporzionale alla di!erenzadi fase riportata nell’eq. 2.6:
#-L =4"
.L
h+l0,
ei+(t0# l0c ) sin(+l0
c )+l0c
(2.28)
Abbiamo così legato la risposta dello strumento alla frequenza del segnaleincidente (si ricordi infatti l’eq. 2.10).
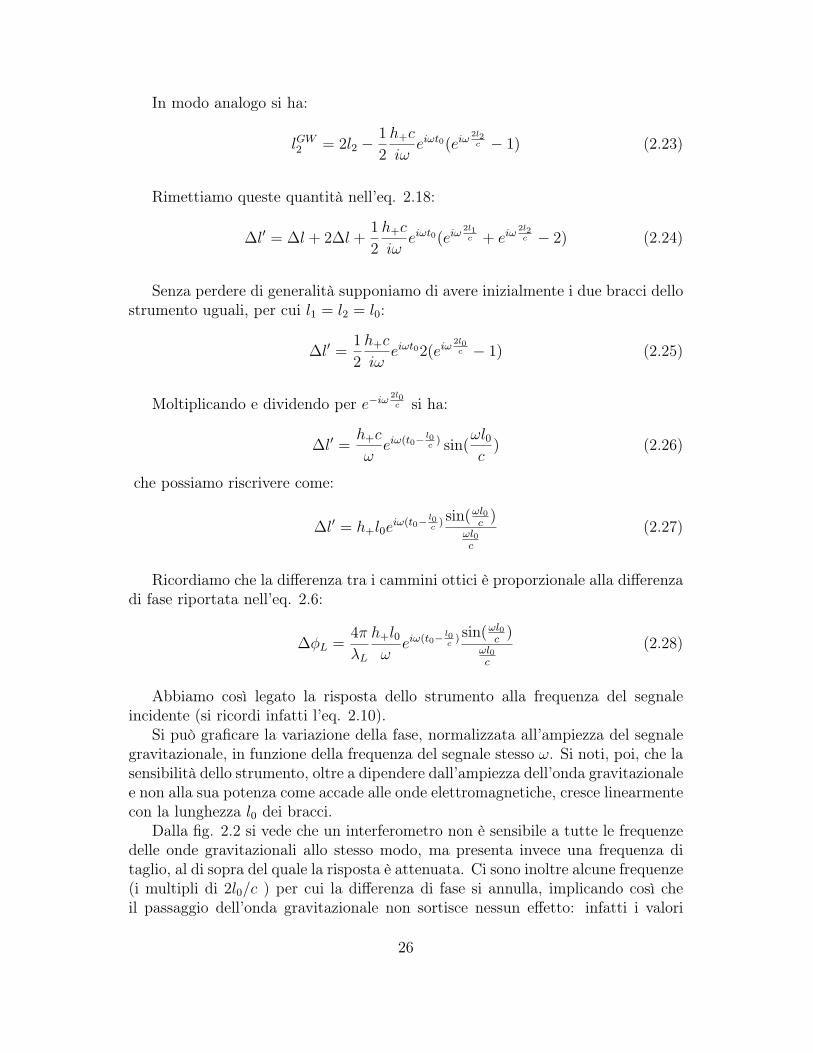
Si può graficare la variazione della fase, normalizzata all’ampiezza del segnalegravitazionale, in funzione della frequenza del segnale stesso ,. Si noti, poi, che lasensibilità dello strumento, oltre a dipendere dall’ampiezza dell’onda gravitazionalee non alla sua potenza come accade alle onde elettromagnetiche, cresce linearmentecon la lunghezza l0 dei bracci.
Dalla fig. 2.2 si vede che un interferometro non è sensibile a tutte le frequenzedelle onde gravitazionali allo stesso modo, ma presenta invece una frequenza ditaglio, al di sopra del quale la risposta è attenuata. Ci sono inoltre alcune frequenze(i multipli di 2l0/c ) per cui la di!erenza di fase si annulla, implicando così cheil passaggio dell’onda gravitazionale non sortisce nessun e!etto: infatti i valori
26

Figura 2.2: andamento della risposta di un interferometro al variare della frequenzadell’onda gravitazionale, calcolata per una lunghezza dei bracci l0 = 3 Km e peruna lunghezza d’onda del laser di .L = 1 µm.
di queste frequenze sono multipli del tempo di percorrenza della luce laser nellostrumento, quindi l’e!etto del passaggio dell’onda gravitazionale è mediato su piùdi un periodo.
Se l’onda gravitazionale non arriva in direzione ortogonale al piano individuatodallo strumento e ha polarizzazione non definita, la generica direzione sarà espri-mibile nel sistema di coordinate sferiche (fig. 2.3) e la variazione della lunghezzadei bracci è data da:
#l"
l"=
31
2(1 + cos2 /)cos20
4h+(t) + [cos/ sin 20] h!(t) (2.29)
La risposta angolare complessiva di un interferometro è mostrata in fig. 2.4; sinoti che lo strumento ha un campo di vista molto ampio, se si eccettua il pianodove è posto [18] e in particolare le direzioni individuate dalle bisettrici dei bracci.
2.2 Sorgenti di rumore in un interferometro terre-stre
Abbiamo visto come un’onda gravitazionale sia rilevata da uno strumento interfe-rometrico. Per poter estrarre il segnale ricercato occorre distinguerlo dai rumoriche interessano questo strumento; occorre descrivere le varie sorgenti di rumoreche lo caratterizzano e studiare come attenuarne gli e!etti.
Possiamo classificare i rumori dividendoli in base al tipo di processo che pro-ducono (fig. 2.5).
27

Figura 2.3: sistema di coordinate sferiche in tre dimensioni; k è il vettore d’ondadel segnale gravitazionale.
Figura 2.4: risposta angolare di un interferometro per un’onda gravitazionale conpolarizzazione +, con polarizzazione & e con polarizzazione generica.
28

Figura 2.5: classificazione delle sorgenti di rumore in un interferometro.
Oltre a questi, esistono altre fonti di rumore, come il thermal lensing, il rumoreelettronico di attuazione e quello originato dalla luce scatterata dalle imperfezionidegli specchi.
Tra tutte queste possibili sorgenti, quelle che maggiormente limitano la sensi-bilità di un interferometro sono lo shot noise alle alte frequenze, il rumore termiconella banda tra 10 Hz ) 100 Hz e quello sismico a frequenze più basse, come sivede in fig. 2.6, calcolata per Virgo.
Analizziamo una per una queste fonti di disturbo.
2.2.1 Il rumore ambientaleGli interferometri terrestri sono sensibili ai movimenti prodotti dall’attività sismi-ca e dell’uomo, come terremoti e lavori industriali. In Virgo il rumore sismicoagisce in particolare a basse frequenze2, minori di ) 5Hz, grazie alla presenza delsuperattenuatore.
Dalle misure geofisiche attuate con dei sismografi [18] si deduce che i motitellurici sono isotropi e hanno ampiezza spettrale di spostamento pari a:
x(f) ) 10#7 1
f 2[m/
-Hz], f > 0.01Hz (2.30)
In Virgo, considerando due masse di test poste a distanza l0 = 3 Km, taleampiezza corrisponde ad una perturbazione della metrica di:
hsism(f) =2-
2
l0x(f) ) 10#9
f 2[1/-
Hz] (2.31)
2Si ricordi che questa è la frequenza del segnale gravitazionale, non quella della luce laser.
29
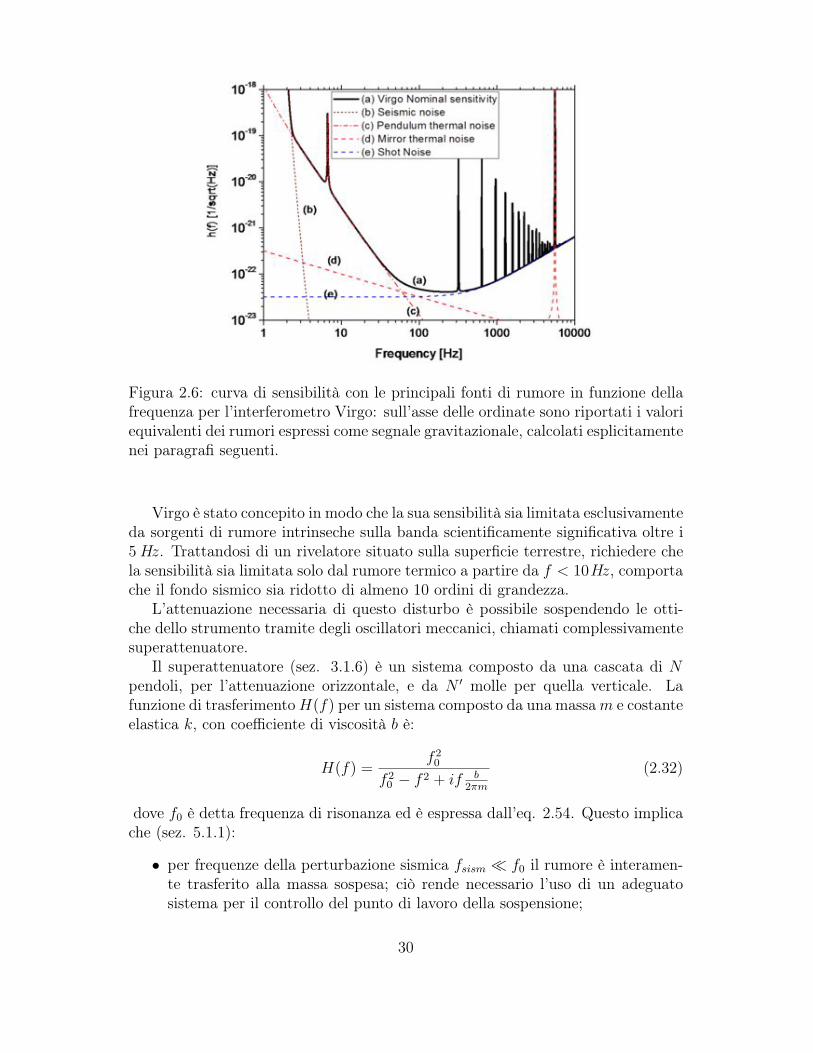
Figura 2.6: curva di sensibilità con le principali fonti di rumore in funzione dellafrequenza per l’interferometro Virgo: sull’asse delle ordinate sono riportati i valoriequivalenti dei rumori espressi come segnale gravitazionale, calcolati esplicitamentenei paragrafi seguenti.
Virgo è stato concepito in modo che la sua sensibilità sia limitata esclusivamenteda sorgenti di rumore intrinseche sulla banda scientificamente significativa oltre i5 Hz. Trattandosi di un rivelatore situato sulla superficie terrestre, richiedere chela sensibilità sia limitata solo dal rumore termico a partire da f < 10Hz, comportache il fondo sismico sia ridotto di almeno 10 ordini di grandezza.
L’attenuazione necessaria di questo disturbo è possibile sospendendo le otti-che dello strumento tramite degli oscillatori meccanici, chiamati complessivamentesuperattenuatore.
Il superattenuatore (sez. 3.1.6) è un sistema composto da una cascata di Npendoli, per l’attenuazione orizzontale, e da N " molle per quella verticale. Lafunzione di trasferimento H(f) per un sistema composto da una massa m e costanteelastica k, con coe"ciente di viscosità b è:
H(f) =f 2
0
f 20 " f 2 + if b
2&m
(2.32)
dove f0 è detta frequenza di risonanza ed è espressa dall’eq. 2.54. Questo implicache (sez. 5.1.1):
• per frequenze della perturbazione sismica fsism , f0 il rumore è interamen-te trasferito alla massa sospesa; ciò rende necessario l’uso di un adeguatosistema per il controllo del punto di lavoro della sospensione;
30

• per la frequenza fsism = f0, si è in condizione di risonanza e il rumore è am-plificato di un fattore pari al fattore di merito Q = 2"mf0/b; ciò rende neces-sario l’uso di un sistema di smorzamento attivo delle risonanze meccanichedell’attenuatore;
• per frequenze fsism . f0 il rumore è al contrario attenuato di un fattoref 2
0 /f2; nel caso di N pendoli si a (f0/f)2N .
Il rumore newtoniano, invece, è causato dai cambiamenti nella distribuzionedelle masse in prossimità dello strumento. Ad esempio, quando ci sono variazioninella densità dell’atmosfera o del terreno, oppure ci sono dei corpi che si muovo-no nelle vicinanze, varia l’attrazione gravitazionale che è direttamente percepitadagli specchi dell’interferometro, in modo indipendente dal sistema di isolamentopresente.
In realtà, nella maggior parte dei casi, questa perturbazione ha un’intensitàcosì bassa da essere al di sotto della soglia di rivelazione degli interferometri [21]
2.2.2 Lo shot noiseQuesto tipo di rumore è causato dalla fluttuazione statistica del numero di fotoniincidenti sul rivelatore che si traduce in un’incertezza sul segnale misurato, inter-pretabile nel caso specifico di un interferometro, come un movimento fittizio dellesuperfici ottiche.
Ogni sorgente luminosa, quindi anche il laser, emette un numero N di fotonisecondo una distribuzione poissoniana la cui deviazione standard 1N è data da:
1N =-
N (2.33)
Il fotodiodo di rivelazione misura la potenza in uscita esprimibile come l’energiamedia portata dai fotoni incidenti E nell’unità di tempo #t:
Pout =E
#t& = N
h,L
#t& (2.34)
dove & è l’e"cienza quantica con cui il fotodiodo risponde ad un singolo fotoneincidente. Da qui possiamo ricavare il numero di fotoni N in funzione della potenzarilevata e usando l’eq. 2.33 si trova la variazione del numero di fotoni #Nshot
causata dallo shot noise:
#Nshot =
5Pout#t
h,L&(2.35)
Di!erenziando l’eq. 2.34 rispetto a N e sostituendo 2.35, si trova la variazionedi potenza #Pshot:
#Pshot =
5
Pout&h,L
#t(2.36)
31
Da qui si può calcolare il rapporto segnale/rumore S/N per un interferometroa!etto solo da shot noise: il rumore è ovviamente espresso con l’eq. 2.36 appenascritta, mentre il segnale gravitazionale è quello dell’eq. 2.17:
S
N=
PGWout
#Pshot=
5
Pout&h,L
#t
C sin(#-L)0
1 + Ccos(#-L)kh(l1 + l2) (2.37)
Questa quantità va massimizzata così da determinare la condizione per la qualelo strumento raggiunge la massima sensibilità:
• se si ha un interferometro ideale (C = 1), l’uscita deve coincidere con lafrangia scura;
• se si ha un interferometro reale (C < 1), l’uscita deve essere leggermentespostata dalla frangia scura.
In ogni caso il minimo valore rivelabile dallo strumento, cioè la minima varia-zione della fase #-L, si trova imponendo che il rapporto S/N sia uguale a 1 dacui:
#-minL =
5h,&
Pin#t(2.38)
che corrisponde ad una minima variazione misurabile della metrica data dalladensità spettrale (ottenuta sostituendo nell’eq. 2.6 l’eq. 1.28):
hshot =.L
2"l0
5h,&
Pin#t(2.39)
Per l’interferometro Virgo con la configurazione di Michelson il contributo diquesta sorgente di rumore è:
hshot ) 10#211/-
Hz (2.40)
mentre nella banda di frequenza intorno ai 100 Hz, la stima del segnale gravi-tazionale da misurare è due ordini di grandezza inferiore. Ne risulta che occorreaumentare la sensibilità di un interferometro ovvero diminuire la minima variazio-ne di fase misurabile. Per questo possiamo aumentare la potenza in ingresso dellaser Pin e la lunghezza dei bracci l0. Poichè bracci più lunghi di alcuni Km sonodi"cilmente realizzabili sulla Terra e aumentare la potenza del laser di più di unordine di grandezza implica maggiore rumore dato dalla pressione di radiazione,allora si preferisce amplificare la variazione di fase accumulata nei bracci con dellecavità di tipo Fabry-Perot e incrementare la potenza all’interno dello strumentoinserendo in ingresso uno specchio di ricircolo (sez. 3.1.2).
32

2.2.3 La pressione di radiazioneQuesto tipo di disturbo, come il precedente, è provocato dalle fluttuazioni statisti-che dei fotoni incidenti sullo specchio: i fotoni trasferiscono impulso alla superficieottica a cui giungono alterandone la posizione.
Le fluttuazioni di pressione producono un rumore, espresso in funzione dellavariazione della metrica hrad [18], pari a:
hrad =4"2
m,2l0
5hPin
2"3c.(2.41)
dove m è la massa dello specchio considerato, , e . le grandezze caratteristichedell’onda gravitazionale e l0 la lunghezza dello strumento.
Come si vede, per diminuire gli e!etti di questo rumore occorre aumentare lamassa degli specchi e diminuire la potenza entrante Pin: questa richiesta si opponea quella trovata per lo shot noise. Ci sarà, quindi, un valore di potenza del lasercritico dedotto bilanciando queste due componenti del rumore e usando come pa-rametro la reazione meccanica degli specchi. Questo valore è almeno due ordini digrandezza superiore a quello attualmente caratteristico degli attuali interferometri.
2.2.4 La luce di!usaLa luce che attraversa l’interferometro può essere di!usa da vari fattori, come adesempio dalle imperfezioni presenti sulla superficie degli specchi o dalla presenzadi molecole di gas residue presenti all’interno dello strumento in cui è fatto ilvuoto, come si vedrà esplicitamente nel Capitolo 3. In quest’ultimo caso, i fotoniche viaggiano lungo i bracci dell’interferometro possono essere di!usi da questemolecole, causando così una variazione dell’indice di rifrazione n. Esiste infatti larelazione [51]:
n = 1 + )Pres
Patm= 1 + )
Nres
Natm(2.42)
dove Pres indica la pressione residua all’interno del sistema dove e’ fatto il vuoto,Patm la pressione atmosferica, Nres e Natm le rispettive densità molecolari. Lacostante ) vale circa 1, 2 · 10#4.
Si calcola il contributo di questo rumore nella rivelazione del segnale gravita-zionale di lunghezza d’onda . [18]:
hgas =2
l0
6778 V0
NA
(n" 1)2
2"v0
5l0.
p
p0
.T0
T
/3/2
(2.43)
dove V0 è il volume di una mole di gas alla temperatura T0 e alla pressione p0,NA è il numero di Avogadro, n l’indice di rifrazione e v0 è la velocità media di unamolecola del gas residuo.
33

2.2.5 Il rumore termicoPossiamo ora trattare del rumore termico prodotto dal movimento microscopicocasuale delle particelle che compongono un sistema in equilibrio termodinami-co, movimento che si ripercuote a livello macroscopico come un’incertezza sullaposizione o sulle dimensioni del sistema stesso.
Nel presente paragrafo parleremo delle basi teoriche che stanno dietro l’interpre-tazione di questo fenomeno, dalla prima formulazione di Einstein fino al TeoremaFluttuazione-Dissipazione in una o più dimensioni; parleremo, poi, dei diversi ti-pi di dissipazione che intervengono in un interferometro e come se ne calcolano icontributi.
Il moto browniano
Si parla di moto browniano o random walk, ogniqualvolta si trova un moto casualeapparentemente non regolato. Se si prende una piccola particella immersa in unfluido e la si osserva al microscopio, si troverà che non resta ferma ma presenta unmoto irregolare e imprevedibile: Einstein per primo interpretò questo fenomeno[23].
Le fluttuazioni della posizione della particella sono dovute agli urti con le mo-lecole che costituiscono il fluido. Dato che su una singola particella agiscono ungran numero di fattori microscopici indipendenti, l’e!etto complessivo non può es-sere costante: macroscopicamente tale e!etto è rappresentabile tramite una forzadissipativa, la viscosità, che quantifica la distribuzione dell’energia della particellaalle molecole del liquido.
Possiamo calcolare le fluttuazioni della particella a partire dall’equazione delmoto; per un corpo di massa M , con velocità v e posizione x che subisce l’e!ettodella forza media viscosa di coe"ciente b e della forza istantanea F (t) dovuta agliurti si ha, nel caso unidimensionale:
Mdv
dt= "v
b+ F (t) (2.44)
Le due forze che compaiono a secondo membro dell’eq. 2.44 sono l’espressionemacroscopica media e l’espressione microscopica della stessa causa, gli urti traparticelle.
Questa equazione può essere integrata in opportune condizioni [19]. Da qui èpossibile ricavare successivamente la velocità quadratica media < v(t)2 >.
< v(t)2 >= v20 e#2t/) +
kBT
MK' (1" e#2t/) ) (2.45)
dove kB è la costante di Boltzmann, T la temperatura del sistema in esame e' = Mb il tempo di rilassamento del sistema.
Inoltre è possibile fare un’analisi spettrale del fenomeno, cioè analizzare indettaglio la ripartizione delle variazioni in componenti più o meno veloci. Passando
34

alle trasformate di Fourier della variabile casuale < v(t)2 > si ricava lo spettro dipotenza wv(f):
< v(t)2 >=- %
0wv(f) df (2.46)
Per calcolare tale quantità si usa generalmente il teorema di Wiener-Khinthine[22] che stabilisce come lo spettro di potenza e la funzione di autocorrelazione $x
3,siano l’uno la trasformata di Fourier dell’altra. Allora lo spettro di potenza per lavelocità della particella immersa in un fluido è:
wv(f) =4kBTb
1 + (2"f')2(2.47)
Questa funzione si può approssimare:
• per f , 1/' come una funzione costante; si parla infatti di rumore bianco opiatto, indipendente dalla frequenza;
• per f . 1/' come una funzione decrescente che smorza i valori della velocitàdella particella.
Si noti che lo spettro di potenza delle fluttuazioni legate al rumore termicodipende linearmente dalla temperatura a cui si trova il sistema e dal coe"ciente diattrito viscoso b. Quindi, in linea teorica, diminuendo la temperatura del sistemao la sua viscosità è possibile diminuire il contributo dato dal rumore termico.
Quanto detto finora si può generalizzare per esprimere il rumore termico di unqualunque sistema fisico dove valgono le ipotesi formulate inizialmente. Esistonosistemi, come quello composto da un solido cristallino, in cui non è possibile scriverela forza istantanea F (t) dovuta agli urti o in cui la dissipazione avviene in unaforma diversa dalla viscosità. In questi casi, allora, si può utilizzare il Teorema diFluttuazione-Dissipazione.
Il Teorema Fluttuazione-Dissipazione
Il Teorema Fluttuazione-Dissipazione lega un generico fenomeno dissipativo di unsistema al suo rumore termico, quindi alle fluttuazioni delle grandezze associate,indipendentemente dagli eventi microscopici che avvengono [24, 25].
Per poter enunciare questo teorema occorre prima definire alcune quantità.Prendiamo un sistema unidimensionale in equilibrio termodinamico che sia li-
neare, ovvero che risponda linearmente ad una sollecitazione esterna, e dissipativo,3La funzione di autocorrelazione !y della variabile y(t) è:
!y =- !
"!y(t)y(t + t#)dt#
35

ovvero che perda energia tramite processi irreversibili. Poniamo che su questo siste-ma agisca una sollecitazione esterna F (t) e che esso risponda con la sola coordinataX(t) da cui si deduce la velocità X(t) tramite l’equazione del moto.
Passando dalle dipendenze temporali alle espressioni in funzione della frequenzaf tramite la trasformata di Fourier, si definisce impedenza del sistema Z(f):
Z(f) =F (f)˜X(f)
(2.48)
dove le quantità con la tilde indicano le trasformate corrispondenti.Da notare che da queste grandezze si può definire anche la funzione di trasfe-
rimento del sistema:
H(f) =X(f)
F (f)=
1
ifZ(f)(2.49)
Il teorema Fluttuazione-Dissipazione stabilisce che lo spettro di potenza delrumore termico agente sullo spostamento X(t) è pari a:
wX(f) =kBT
"2f 2%
"1
Z(f)
#
(2.50)
mentre lo spettro di potenza del rumore termico agente sulla sollecitazione F (t)è pari a:
wF (f) = 4kBT%[Z(f)] (2.51)
Quindi non c’è bisogno di conoscere esplicitamente ciò che avviene a livello mi-croscopico all’interno del sistema, ma basta saper modellizzare macroscopicamentel’impedenza Z(f) dove è possibile includere anche e!etti diversi tra loro.
Similmente al caso del moto browniano, anche qui lo spettro di potenza di-pende dalla temperatura del sistema e dall’impedenza che caratterizza il processodissipativo: riducendo queste quantità, ad esempio ra!reddando il sistema o mo-dificandolo così da ridurre la dissipazione, è possibile diminuire il contributo delrumore termico.
È possibile generalizzare il teorema anche per un sistema a n dimensioni [26]:in questo caso avremo n coordinate Xi(t) e ci saranno Fi(t) sollecitazioni. L’im-pedenza sarà data da una matrice:
Fi(f) = Zij˜Xj(f) (2.52)
Rumore termico in un pendolo semplice reale
Possiamo fare l’esempio di un pendolo per mostrare come si calcola l’impedenza equal’è il rumore termico associato [29, 30].
36

L’equazione del moto per un pendolo di massa m, lunghezza l che si muove inun mezzo di coe"ciente di attrito viscoso b è:
mx + bx + kx = F (t) (2.53)
in cui è stata aggiunta il temine forzante F (t).La costante k determina la frequenza di risonanza f0, dipendente dal tipo di
moto considerato, del sistema:
f0 =1
2"
5k
m(2.54)
In un pendolo reale, infatti, si hanno due tipi di moto distinti (fig. 2.7):
1. il moto nella direzione orizzontale dato dalla forza peso del corpo appeso;trascurando i movimenti torsionali, il filo che sostiene la massa non presentaelasticità e il moto armonico è dominato dalla frequenza determinata dallacostante del pendolo:
kgr =mg
l(2.55)
2. il moto nella direzione verticale dato dalla forza elastica che si esercita conla flessione del filo (non indeformabile) attorno al suo punto di piegatura;il moto armonico avviene ad una frequenza determinata dalla costante dielasticità del punto di piegamento del filo [28, 55]:
kel =
-mgEJ
2l2(2.56)
dove E è il modulo di Young, dipendente dal tipo di materiale scelto e J è ilmomento d’inerzia della sezione del filo4. Si noti che questo moto è distintoda quello puramente verticale, dato invece dall’elasticità del filo considerabilecome una molla e con costante elastica k = EA
l
In generale, se il filo è molto sottile, vale kel , kgr. Ma se lo spessore del filonon è piccolo, il rapporto tra le due costanti kel/kgr può assumere valori compresitra 10#2 e 10#3.
4Il momento di inerzia della sezione del filo è definito come
J =-
y2dA
dove dA è la sezione d’area infinitesima e y è la distanza tra dA e l’asse rispetto al quale si calcolail momento. Per un filo cilindrico rispetto al suo asse si ha:
J =14!r4 =
14!
A2
dove A è la sezione del filo e r il suo raggio.
37

Figura 2.7: schematizzazione di un pendolo reale con flessione del filo di sospen-sione: è indicata la forza peso con le sue componenti nella direzione tangente eortogonale al filo.
C’è da notare che la costante di eq. 2.55 non è causa di perdite; al contrario lacostante elastica kel dà il contributo dissipativo. Le molecole costituenti il continuodi un corpo determinano il suo comportamento elastico: kel è intrinsecamentedipendente dalle inevitabili imperfezioni reticolari presenti e quindi dissipativo.
La dissipazione si rivela nel ritardo della risposta ad una sollecitazione F (t)esterna: il ritardo provoca deviazioni dall’andamento aspettato e si parla di ane-lasticità o frizione interna dei materiali.
Bisogna generalizzare [18] la costante elastica kel tenendo conto anche del termi-ne dissipativo: per un sistema fisico generico è possibile ricavare questo parametrocon un modello meccanico di questo tipo.
Possiamo considerare il filo del pendolo come il parallelo tra una molla idealedi costante elastica kel e la serie formata da una molla di costante elastica #kel
e da un pistone, che quantifica lo smorzamento a velocità costante con un certocoe"ciente c. Si può calcolare la costante elastica e!ettiva globale keff per questoschema, chiamato unità di Maxwell o solido di Debye e mostrato in fig. 2.8.
Si trova la costante elastica totale, dipendente dalla frequenza di lavoro, consi-derando il sistema come un circuito elettrico e applicando le regole per i componentiin serie e parallelo:
keff ' kel
1
1 + i#kel
kel
f'
1 + f 2' 2
2
(2.57)
dove si è definito ' = c/#kel il tempo di riposta del sistema.Possiamo riscrivere l’eq. 2.57 in questo modo:
keff ' kel (1 + i-(f)) (2.58)
dove -(f) prende nome di angolo di perdita e rappresenta il grado di anelasticità
38

Figura 2.8: modello meccanico per l’anelasticità: una molla ideale è posta inparallelo con la serie formata da una molla e un pistone che rappresenta losmorzamento.
della molla connessa al filo del pendolo. Se il sistema è soggetto ad una sollecita-zione esterna di tipo sinusoidale, a seconda della frequenza f , l’angolo di perdita- esprime lo sfasamento della risposta 5.
In questo modo possiamo descrivere molti processi irreversibili classificabili inbase al tipo di perdite che procurano, interne o esterne.
Allora la funzione di trasferimento del sistema descritto dall’eq. 2.53, in cuitrascuriamo il contributo dato dalla viscosità del mezzo è:
H(f) =1
m(f 20 " f 2 + i-f0)
(2.59)
la cui espressione era già stata data nel caso del rumore sismico dall’eq. 2.32.Per questo tipo di sistema l’impedenza meccanica si calcola dalla definizione
eq. 2.48 e si ottiene:Z =
2"m
f[-f2
0 + i(f 2 " f 20 )] (2.60)
Allora lo spettro di potenza del rumore termico, considerando - = cost sarà:
wX =kBT
"2fm
-f20
(f 2 " f 20 )2 + -2f 4
0
(2.61)
Si osservano due andamenti diversi:
• per f , f0 si ha wX ) f#0,5;5Per esprimere la dissipazione dei materiali si usano quantità complesse. Ad esempio, nel caso
della costante elastica, si ha:
keff (f) = kr(f) + iki(f) = |keff |ei!(f)
dove l’angolo di perdita " è proprio la fase del numero complesso.
39
• per f . f0 si ha wX ) f#2,5;
Questo vale solo in un intervallo ristretto di frequenze [34] per cui la condizione- = cost è verificata.
In ogni caso è importante conoscere l’andamento dello spettro del rumore ter-mico. Dato che gli interferometri sono strumenti sensibili in una banda ampia difrequenze, la pendenza della curva del rumore termico fuori dalla risonanza deveessere stimata e presa in considerazione attentamente per risalire al contributo diquesto disturbo sulla misura.
Nel caso specifico, la dissipazione di un pendolo è dato dalla frizione internache dipende fortemente dal tipo di materiale scelto e dai gradi di libertà in essopresenti: se ci sono degli stress interni, come variazioni di temperatura e densitàdate da difetti puntiformi o impurità, l’equilibrio all’interno del corpo varia e variaanche il valore dell’angolo di perdita.
Tipi di dissipazione
Abbiamo visto come è possibile ricavare informazioni sul rumore termico presentein un sistema fisico dall’utilizzo del Teorema Fluttuazione-Dissipazione; infattiquello che serve conoscere è l’impedenza Z connessa all’anelasticità del sistemastesso. Abbiamo visto anche che per un pendolo tale anelasticità è indicata tramitel’angolo di perdita -.
Esistono molti processi caratterizzati da tempi di azione diversi in competizionein un sistema reale.
Per le perdite interne, causate dalla struttura stessa e dal materiale di cui ècomposto un sistema fisico, si ha:
smorzamento strutturale: il reticolo di cui è costituito il materiale in esamepresenta delle imperfezioni e delle impurità. Se la struttura è eccitata vibra-zionalmente, le impurità e le imperfezioni assorbono l’energia vibrazionaleportando allo smorzamento delle vibrazioni stesse. Molti metalli presentanoun valore dell’angolo di perdita - per questo tipo di smorzamento pari a10#3 ) 10#4, mentre altri materiali, tipo la silice fusa, hanno un angolo diperdita pari a 10#5 ) 10#7.
smorzamento termoelastico: se il corpo non è omogeneo, zone a densità diver-sa hanno temperatura diversa. Una vibrazione meccanica (come ad esempiola flessione di un filo) crea delle disomogeneità come la compressione o lararefazione di alcune regioni: in particolare, quando il filo si flette, un la-to si riscalda e l’altro si ra!redda. Si formano così flussi di calore tra dueregioni a diversa temperatura. È intuitivo comprendere che questo generedi dissipazione può divenire critica quando una sezione del corpo in esamediviene molto più piccola rispetto alle altre, non permettendo un riequilibrioisotropo e ottimale del flusso di calore. Inoltre la temperatura è legata al-l’allungamento di un corpo tramite il coe"ciente di espansione termica 2 il
40

quale determina il rapporto #kel/kel dell’eq. 2.57 [31]. Possiamo riscriverela costante elastica e!ettiva per un corpo che si flette modellizzabile con ilsolido di Debye:
keff ' kel
1
1 + iE22T
cS
f'
1 + f 2' 2
2
(2.62)
dove E è il modulo di Young, cS è il calore specifico e T è la temperaturadel sistema.Si noti che questo meccanismo di dissipazione, rilevante per il rumore termicodelle sospensioni degli specchi:
• dipende dalle proprietà del materiale e non dal dettaglio della sua strut-tura o composizione chimica; quindi è possibile ridurre l’angolo di per-dita ad esso associato e conseguentemente il suo contributo al rumoretermico scegliendo un materiale con un basso valore del coe"ciente diespansione termica e bassa capacità termica;
• non può essere applicato nel caso di moto torsionale, in cui la costan-te del moto è il coe"ciente di deformazione di taglio e non quello diespansione termica.
perdite superficiali: le imperfezioni e le impurità si trovano più frequentementesulla superficie del corpo, essendo esposta maggiormente all’azione di agentichimici o contatti meccanici. Si suppone allora che le dissipazioni avvenganopreferibilmente in questa regione.
Per le perdite esterne, causate dall’ambiente dove si trova il sistema fisico, siha:
perdite di rinculo: un corpo in oscillazione tende a trasmettere parte del suomoto anche al supporto che lo regge. Infatti nel caso reale, il supporto hamassa finita e non è rigido, quindi l’energia viene parzialmente dissipata sudi esso.
perdite in aria: un corpo che oscilla in un fluido frena a causa dell’attrito viscosopresente. Questa fonte di rumore può essere attenuata se poniamo il sistemanel vuoto.
propagazione delle impurità: a causa delle vibrazioni meccaniche o delle ecci-tazioni termiche le impurità e i difetti del reticolo cristallino possono muo-versi. Conseguentemente parte dell’energia può essere dissipata in questomodo.
Una volta stimato l’angolo di perdita per questi diversi processi, dobbiamorisalire alla parte reale dell’impedenza, necessaria per il calcolo dello spettro dipotenza. In generale per trovare questa quantità si sono sviluppati alcuni metodidi calcolo, come l’espansione dei modi normali, l’espansione dei modi avanzata [32]e gli approcci diretti [33].
41
Il rumore termico nell’interferometro
Nel caso specifico di un interferometro questo disturbo entra in diversi modi, siasulle sospensioni, sia sugli specchi (substrato e deposito superficiale), limitando lasensibilità strumentale. Per ridurre gli e!etti bisogna identificare prima le variecause di dissipazione e modellizzare i processi. Elenchiamo qui di seguito le diversesorgenti del rumore termico:
• rumore termico delle sospensioni degli specchi (varia la posizione del centrodi massa degli specchi). Si ricorderà che gli specchi di un interferometrosono appesi ad una serie di pendoli in cascata, chiamati complessivamentesuperattenuatore. Questo filtro, che riduce l’e!etto del rumore sismico, in-troduce a sua volta rumore termico, come abbiamo descritto nel precedenteparagrafo, essendo composto da molle e pendoli. In particolare si ha:
– oscillazioni del modo di pendolo: il rumore associato a questo modopuò essere modellizzato come abbiamo già esposto precedentemente,se trascuriamo la resistenza dell’aria. Il calcolo dell’angolo di perdita,necessario per poter risalire all’impedenza e quindi allo spettro di po-tenza, prevede la conoscenza della costante elastica kel e della costantedi pendolo kgr.Si trova ancora l’espressione eq. 2.61, dove l’angolo di perdita - inquesto caso è calcolato come:
- = -elkel
kgr + kel(2.63)
dove -el è l’angolo di perdita per il solo contributo elastico. Si trovache l’angolo complessivo è pari a:
- * 1
l
5mE
N(2.64)
con N numero dei fili di sospensione. Si vede che se lo specchio è so-speso con N fili, la tensione applicata ad ogni filo si riduce di una quan-tità uguale, facendo così ridurre anche la costante elastica e il rumoreassociati.
– oscillazioni dei modi verticali: il rumore associato a questo modo è cau-sato da un accoppiamento con i modi orizzontali di pendolo. Infatti,data la sfericità della Terra, gli specchi alla fine di un braccio dell’in-terferometro individuano due direzioni verticali locali non parallele, maseparate da un angolo 22. Il segnale orizzontale è allora proiettato lungola direzione verticale proprio di questo fattore 2. Lo spettro di rumoresarà:
wvertx = 2
4kBT
f 2m
-f2v
(f 2 " f 2v )2 + -2f 4
v
(2.65)
42
dove fv è la frequenza di risonanza del modo verticale:
fv =1
2"
5"r2EN
ml=
1
2"
5gE
Trl(2.66)
Si noti che r è il raggio dello specchio, e Tr è il carico di rottura dei filidefinito come:
Tr =mg
N"r2(2.67)
relazione usata per l’ultima uguaglianza.– oscillazioni dei modi di violino: il rumore associato è dato dalle nume-
rose risonanze che i fili mostrano ogni volta che sono sottoposti ad unacerta tensione. In questo caso lo spettro di potenza sarà calcolato comeuna somma dei vari contributi, ognuno con la sua frequenza associata.
• rumore termico degli specchi (comprendendo sia il substrato sia il depositosuperficiale, il coating):
– moto browniano: questo rumore può essere interpretato come la fluttua-zione delle particelle che costituiscono il substrato e la superficie dellospecchio, causando una variazione della sua posizione.
– rumore termoelastico: questo rumore nasce dall’accoppiamento dellefluttuazioni termiche con le impurità presenti, come già descritto.
– rumore termorifrattivo: questo rumore invece nasce dall’accoppiamentodelle fluttuazioni termiche con le variazioni della fase della luce.
In conclusione vogliamo sottolineare che il rumore termico di un interferome-tro si può diminuire riducendo la temperatura a cui si trova lo strumento oppurescegliendo dei materiali con minori angoli di perdita, quindi che producono dis-sipazioni inferiori. La prima soluzione non è facilmente attuabile per rivelatoricome Virgo, che ha bracci lunghi 3 Km. Mentre la seconda prevede uno studiodettagliato dei materiali utilizzabili. Ad esempio si trova che:
• il materiale del substrato deve avere basse perdite ottiche, alta conducibi-lità termica e basso coe"ciente di espansione termica (per minimizzare ledistorsioni causate dall’accumulo di energia portata dal fascio incidente); sipotrebbe utilizzare delle sostanze vetrose, come il quarzo o silice fusa;
• il materiale del deposito superficiale deve avere le stesse proprietà termoe-lastiche del substrato, così da ridurre le distorsioni meccaniche; si potrebbeutilizzare dei composti di alluminio e tallio, o alluminio e silicio;
• il materiale delle sospensioni deve avere alta conducibilità termica, bassocoe"ciente di espansione termica, per minimizzare lo smorzamento termoe-lastico (eq. 2.62) e deve poter essere prodotto sotto forma di fibre o nastri[35]; si potrebbe utilizzare sempre silice fusa.
43

Lo scopo del nostro lavoro è proprio lo studio di fattibilità di un prototipo disospensione in silice fusa.
2.3 Interferometri Laser nello spazioAbbiamo analizzato il funzionamento generale di un interferometro di Michelson eabbiamo visto quali tipi di rumore sono presenti in questo strumento. In particolareabbiamo visto come questi sistemi abbiano una banda di frequenze precisa, stabilitadalla lunghezza dei bracci.
Se si vuole cambiare la banda delle frequenze di rivelazione, andando a valoripiù bassi, si deve costruire un rivelatore più lungo. Sulla terra, abbiamo già detto,è di"cile la realizzazione di un progetto del genere; quello che si è pensato è diallestire un interferometro nello spazio, LISA [36].
LISA è l’acronimo di Laser Interferometer Space Antenna ed è portata avantida una collaborazione tra l’agenzia spaziale europea, l’ESA e quella americana, laNASA.
I bracci di questo interferometro spaziale saranno lunghi 5 · 106 Km, il che im-plica una banda di sensibilità tra 10#4 ) 10#1 Hz. In questa regione dello spettrosono presenti sorgenti più intense e che producono un segnale gravitazionale piùlungo nel tempo rispetto alle sorgenti presenti nella banda degli inteferometri ter-restri. Infatti per ora possiamo misurare solo le onde provenienti da sorgenti comeesplosioni di supernovae e coalescenze di stelle doppie, mentre a più basse fre-quenze si possono osservare anche le onde provenienti da buchi neri supermassicci(tipo quelli presenti al centro delle galassie) che presentano un segnale duraturo estabile, con una forma bene nota.
Inoltre, con uno strumento spaziale, si elimina il rumore sismico, connessoall’attività tellurica e dell’uomo, anche se sorgono altri problemi, come ad esempio,le di"coltà tecniche di realizzazione e di gestione di un sistema così complesso nellospazio, oltre alle interferenze dovute a segnali non gravitazionali come la pressionedi radiazione solare e il vento solare, quantità che devono essere continuamentemonitorate.
In ogni caso, LISA sarà composto da tre satelliti identici che individuano ivertici di un triangolo equilatero, essendo separati tra loro da angoli di 60&. Ognunodi essi può essere usato come centro dell’interferometro. Questo ha due vantaggi:
1. si hanno due strumenti indipendenti che potranno rivelare onde gravitazionalidi qualunque polarizzazione e provenienti da qualunque direzione: inoltre,se il segnale dura abbastanza a lungo, sarà possibile stabilire la direzione diprovenienza dell’onda dalla misura della frequenza, dell’ampiezza e della fasedi modulazione (a causa dell’e!etto Doppler, dato dal moto dello strumento);
2. se eventualmente si dovesse danneggiare un satellite, ne rimarebbero co-munque altri due funzionanti, così da non compromettere interamente lamissione.
44

I tre satelliti percorrono un’orbita di raggio pari a 1 UA con centro il Sole (fig.2.9): il piano dell’orbita non coincide esattamente con quello terrestre in modo daminimizzare le perturbazioni dovute all’interazione con il sistema Terra-Luna.
1 UA
5*106km
Figura 2.9: modello meccanico per l’anelasticità: una molla ideale è posta inparallelo con la serie formata da una molla e un pistone che rappresenta losmorzamento.
All’interno di ogni satellite sono presenti due masse di riferimento, due cubi di4 cm di lato costituite da una lega di oro e platino: queste due masse di test sonomantenute in caduta libera, in modo da garantire che solo l’interazione gravitazio-nale agisca su di esse. Per assicurare questa condizione ogni satellite è provvistodi una camera a vuoto e da un sistema di sensori che monitorano le posizioni re-ciproche. Se i corpi rischiano di venire in contatto, una serie di micropropulsori siattiva per spostare leggermente l’involucro del satellite che le ospita.
Le masse di riferimento costituiscono gli specchi di questo interferometro: laloro posizione e i loro movimenti reciproci indicano il passaggio di un’onda gravi-tazionale che ha modificato la metrica dello spazio-tempo.
45
Capitolo 3
Virgo e VirgoAdvanced
Attualmente sono attivi sei rivelatori situati in varie località per la misura delleonde gravitazionali. Essi sono tutti a!etti dalle stesse sorgenti di rumore ma cia-scuno ha caratteristiche e configurazioni diverse. In questo capitolo presenteremoin particolare l’interferometro Virgo che ha sede in Italia, a Cascina (PI). Talestrumento ha bracci lunghi 3Km e con esso si possono rivelare onde gravitazionalidi frequenze comprese tra ) 4 Hz e ) 6 kHz. La sensibilità di Virgo a basse fre-quenze è maggiore rispetto a quella degli altri rivelatori, grazie ai superattenuatoriche riducono il rumore sismico.
Dopo aver descritto lo schema ottico di Virgo e i vari apparati che lo com-pongono, mostreremo la curva di sensibilità a cui si è giunti, confrontandola conquella di progetto. Accenneremo poi ai miglioramenti che saranno apportati conVirgoAdvanced, ponendo attenzione alle sospensioni monolitiche, argomento diquesta tesi, necessarie per la diminuzione del rumore termico.
3.1 VirgoPer introdurre Virgo, partiamo dal suo schema ottico mostrato in fig. 3.1. Èsostanzialmente un interferometro di Michelson a cui sono stati aggiunti sottosi-stemi (come il sistema da vuoto e i superattenuatori) e ulteriori superfici ottiche(come lo specchio di ricircolo di potenza e le cavità Fabry-Perot), utili per ridurrei contributi del rumore sismico e dello shot noise.
3.1.1 Cavità Fabry-PerotI due bracci dello strumento sono sostituiti da due cavità di tipo Fabry-Perot,visualizzate in fig. 3.1 tramite gli specchi d’ingresso del fascio e quelli di uscita(WI e WE, West Input e West End, per il braccio orientato verso Ovest; NI e NE,North Input e North End, per quello orientato verso Nord).
Questo permette di aumentare il cammino ottico del fascio di luce lott, senza
46
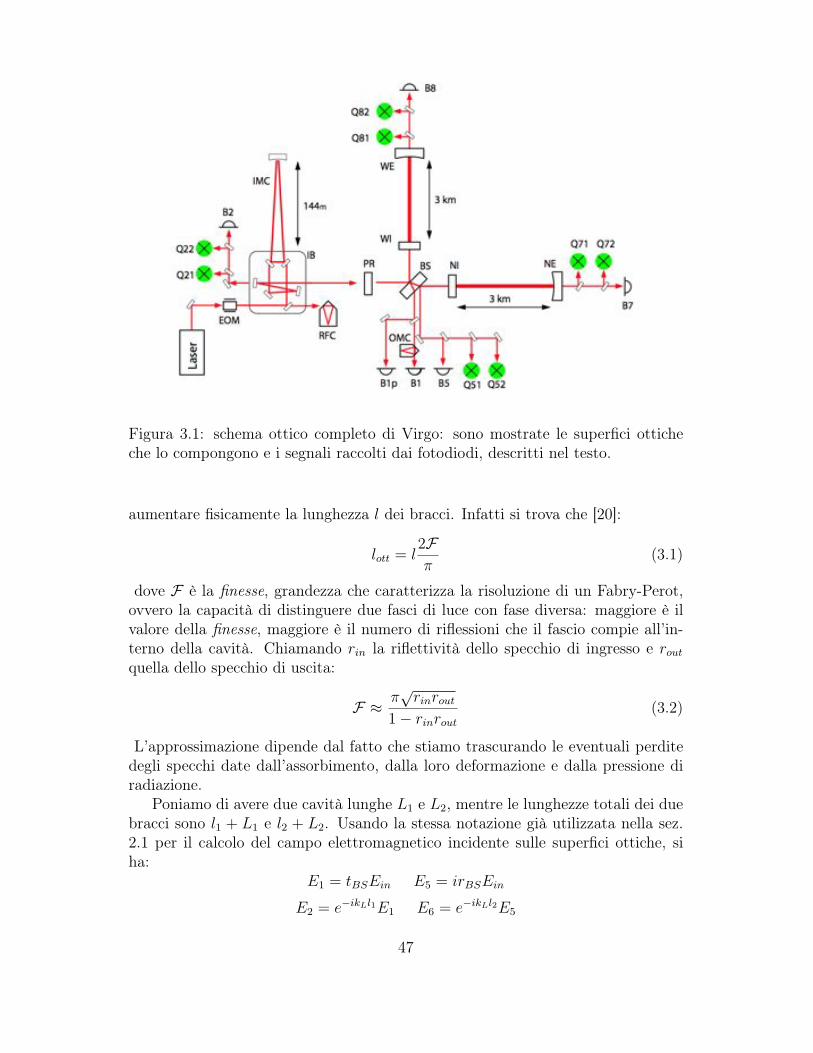
Figura 3.1: schema ottico completo di Virgo: sono mostrate le superfici otticheche lo compongono e i segnali raccolti dai fotodiodi, descritti nel testo.
aumentare fisicamente la lunghezza l dei bracci. Infatti si trova che [20]:
lott = l2F"
(3.1)
dove F è la finesse, grandezza che caratterizza la risoluzione di un Fabry-Perot,ovvero la capacità di distinguere due fasci di luce con fase diversa: maggiore è ilvalore della finesse, maggiore è il numero di riflessioni che il fascio compie all’in-terno della cavità. Chiamando rin la riflettività dello specchio di ingresso e rout
quella dello specchio di uscita:
F ' "-
rinrout
1" rinrout(3.2)
L’approssimazione dipende dal fatto che stiamo trascurando le eventuali perditedegli specchi date dall’assorbimento, dalla loro deformazione e dalla pressione diradiazione.
Poniamo di avere due cavità lunghe L1 e L2, mentre le lunghezze totali dei duebracci sono l1 + L1 e l2 + L2. Usando la stessa notazione già utilizzata nella sez.2.1 per il calcolo del campo elettromagnetico incidente sulle superfici ottiche, siha:
E1 = tBSEin E5 = irBSEin
E2 = e#ikLl1E1 E6 = e#ikLl2E5
47

E3 = A1E2 E7 = A2E6
E4 = e#ikLl1E3 E8 = e#ikLl2E7 (3.3)
dove Aj sono le riflettività del j-esimo Fabry-Perot esprimilbili come numericomplessi:
Aj = Ajei,j (3.4)
La potenza incidente sul fotodiodo in uscita sarà:
Pout = r2BSt2BSPin
%A2
1 + A22 + 2A1A2 cos[(-2 " -1) + 2kL#l]
&(3.5)
Per un interferometro ideale si ha A1 ' A2 ' 1 e rBS = tBS = 1/-
2, allorachiamando #-FP = -2 " -1:
Pout =Pin
2{1 + C cos[(#-FP ) + 2kL#l]} (3.6)
Questa espressione non cambia da quella data dall’eq. 2.10, se si eccettua iltermine di fase aggiuntivo delle cavità Fabry-Perot. In particolare, se si prendeLj . lj, ovvero il braccio è quasi integralmente costitutito dal Fabry-Perot, si puòtrascurare il termine 2kL#l, piccolo in confronto a #-FP .
Quando passa un’onda gravitazionale le lunghezze dei bracci dello strumen-to variano di una quantità espressa dall’eq. 2.15, dove a lj si può sostituire Lj
senza commettere un grande errore. È possibile dimostrare [16] che una piccolaperturbazione #Lj della lunghezza di un braccio genera un cambiamento anche in#-FP :
#-FP = 2kL2F"
#LGW = 2kL2F"
1
2h(L2 " L1) (3.7)
Si trova che la variazione della fase data dal passaggio di un’onda gravitazionaleè amplificata di un fattore proporzionale alla finesse.
Nel caso di un interferometro reale questa amplificazione dipende dalla frequen-za dell’onda gravitazionale incidente; a causa del valore finito della velocità dellaluce, lo strumento si comporta come un filtro passa-basso con frequenza di tagliofcut off :
fcut off =c
4F l0(3.8)
con l0 lunghezza iniziale di un braccio.Per Virgo si ha F = 50 [40], quindi la frequenza di taglio è di 500 Hz.
48

3.1.2 Specchio di ricircoloAbbiamo visto nel paragrafo 2.2.2 che per diminuire il contributo dello shot noisebisogna aumentare la potenza incidente sullo specchio, quindi la potenza del laser.Ma questo non è facilmente attuabile a causa della instabilità della sorgente.
Allora si aumenta la potenza che attraversa l’interferometro a posteriori, in-troducendo uno specchio di ricircolo (in fig. 3.1 contrassegnato con PR, PowerRecycling) tra il laser e il beam splitter [39].
Quando la posizione del beam splitter è tale da mantenere l’interferenza distrut-tiva in uscita, la maggior parte della luce entrante è riflessa indietro dall’interfero-metro. Con il posizionamento dello specchio di ricircolo questa luce è reinniettatacon un fattore di guadagno GPR che dipende dalle perdite complessive ptot dellesuperfici ottiche:
GPR '1
ptot(3.9)
Si noti che il termine ptot include l’assorbimento degli specchi, la percentualedi luce scatterata e le eventuali deformazioni o difetti strutturali degli specchi. Sistima [40] che per Virgo ptot ) 2%, ottenendo così un guadagno pari a 50.
È possibile valutare la minima ampiezza di un’onda gravitazionale misurabilecon un interferometro dotato di specchio di ricircolo e cavità Fabry-Perot, soggettoa shot noise [51]:
hshot =1
4(L1 + L2)F
677784"h.Lc
&GPRPin
9
:1 +
1f
fcut off
22;
< (3.10)
pari a 10#231/-
Hz per Virgo. Questo valore è due ordini di grandezza inferiorea quello dato dall’eq. 2.40. Per questo motivo lo shot noise limita la sensibilità diquesto strumento a partire dai 500" 600 Hz.
C’è da tener conto, però, che se da un lato lo specchio di ricircolo permettela riduzione del contributo dello shot noise, dall’altro aumenta quello del rumoretermico: infatti ogni riflessione reintroduce questo disturbo nello strumento.
3.1.3 Sistema di iniezioneParliamo ora del sistema di iniezione, ovvero di come la luce della sorgente vieneimmessa all’interno dello strumento. In fig. 3.1 sono mostrati il laser, l’Electro-Optical Modulator (EOM), l’Input Bench (IB), l’Input Mode Cleaner (IMC) e laReference Frequency Cavity (RFC).
La sorgente è costituita da due laser, uno primario Nd : Y AG ed uno secondarioNd : Y V O4, che emettono con una frequenza di .L = 1, 064 µm; sono entrambicollocati in aria su un banco ottico ancorato a terra. I due laser sono collegatitra loro tramite una serie di diodi in modo che la potenza risultante sia di 20 W ,stabile alla frequenza di emissione.
49

Il fascio così prodotto è inviato ad un modulatore di fase. La modulazione ènecessaria per ridurre il contributo di rumore dovuto alle fluttuazioni di ampiezzadella luce laser e il rumore elettronico 1/f [19]. Allora modulare il campo elet-tromagnetico in ingresso e demodularlo coerentemente in uscita è equivalente aspostare la rivelazione nella banda delle radio frequenze, ed aumentare il rapportosegnale/rumore.
Esistono diversi modi per modulare la grandezza misurata: quello che si usanell’interferometro Virgo è un elemento elettro-ottico (EOM) che varia la fase dellaluce del laser. In tal modo il fascio, inizialmente di un’unica frequenza, si dividein tante componenti con frequenze vicine tra loro, come mostrato in fig. 3.2. Lamodulazione del segnale avviene con la tecnica di Pound-Drever-Hall [42, 43].
Figura 3.2: modulazione di fase della luce laser entrante: si distingue il fasciocarrier (CA) e quelli sideband (SB).
Se il campo elettromagnetico del laser è espresso dall’eq. 2.1, che possiamoscrivere come:
E = E0 ei+Lt (3.11)
e la modulazione di fase è data da:
V = V0 ei!t (3.12)
il campo risultante è:E " = E0 ei[+Lt+m sin(!t)] (3.13)
Possiamo esprimere il campo risultante con le funzioni di Bessel Jn(m), dovem è l’indice di modulazione:
E " = E0
%!
n=#%Jn(m)ei(+L+n!)t (3.14)
Quando m, 1, si possono prendere solo i primi tre termini:
E " ' E0[J0(m)ei+Lt + J1(m)e(+L+!)t " J#1(m)e(+L#!)t] (3.15)
50

che rappresentano, nell’ordine, il fascio portante, carrier, e le prime due bandelaterali, sideband. Da queste si possono ricavare informazioni sullo stato dell’inter-ferometro. Infatti dato che lo strumento lavora in frangia scura, il fascio portanteè in condizione di interferenza distruttiva: quindi al sistema di rivelazione arrivanole due bande laterali, qui filtrate. Se si creano delle asimmetrie tra le lunghezzedei bracci, causate dal passaggio di un’onda gravitazionale oppure da un segnaledi disturbo, il fascio carrier non è più in condizione di interferenza distruttiva edè misurato.
Il fascio di luce laser così modulato è inviato all’Input Bench: questo è unbanco ottico posto nel vuoto e sospeso tramite un superattenuatore. Su di essosono fissati alcuni specchi, mostrati in fig. 3.1, tra cui gli specchi di ingresso e diuscita dell’Input Mode Cleaner e gli specchi della Reference Frequency Cavity.
L’ IMC è una cavità triangolare, lunga 144 m con finesse F = 1000 che ha lafunzione di allargare e allineare il fascio entrante e di filtrare le fluttuazioni sullasua posizione, dette beam jitter. Si comporta, quindi, come un filtro spaziale al cuiinterno, il fascio portante risuona, mentre gli ordini superiori sono riflessi indietro.
La RFC, invece, ha il compito di stabilizzare la frequenza del fascio indipenden-temente della modulzione. Infatti la presenza di asimmetrie nei due bracci, comela diversa lunghezza iniziale #L e la diversa finesse #F , rende l’interferometrosensibile alle fluttuazioni in frequenza $f . La densità spettrale dell’ampiezza delsegnale gravitazionale si scrive [41]:
h-f =$f
f
.#L
L+
#FF
/(3.16)
Considerando le asimmetrie dell’ordine di qualche percento, si stima che lafrequenza del fascio possa variare di $f ) 10#5 Hz/
-Hz al valore 10 Hz e di
$f ) 10#6 Hz/-
Hz al valore 100 Hz.
3.1.4 Sistema di rivelazioneÈ il sistema dedicato alla misura della potenza in uscita: il segnale gravitazionalesi misura tramite il fotodiodo indicato in fig. 3.1 con B1. Per fare questo bisognaadattare spazialmente e allineare il fascio ai fotodiodi, filtrare il segnale per au-mentare il contrasto C e separare la frangia scura, che si vuole misurare, dal fascioche si riflette sulla seconda faccia del beam splitter, misurato dal fotodiodo B5 (fig.3.1).
Il sistema si compone di due parti: una parte è posta nel vuoto e sospesatramite un superattenuatore, chiamata l’Output Mode Cleaner (OMC), l’altra è inaria, su un banco ottico ancorato a terra, dove si trovano i fotodiodi di misurazioni.
L’Output Mode Cleaner è una cavità ottica lunga 25 cm con F = 50: comenell’Input Mode Cleaner anche qui si trasmette solo il carrier e si filtrano i modidi ordine superiore. In questo modo si incrementa il contrasto C tra le franged’interferenza.
51
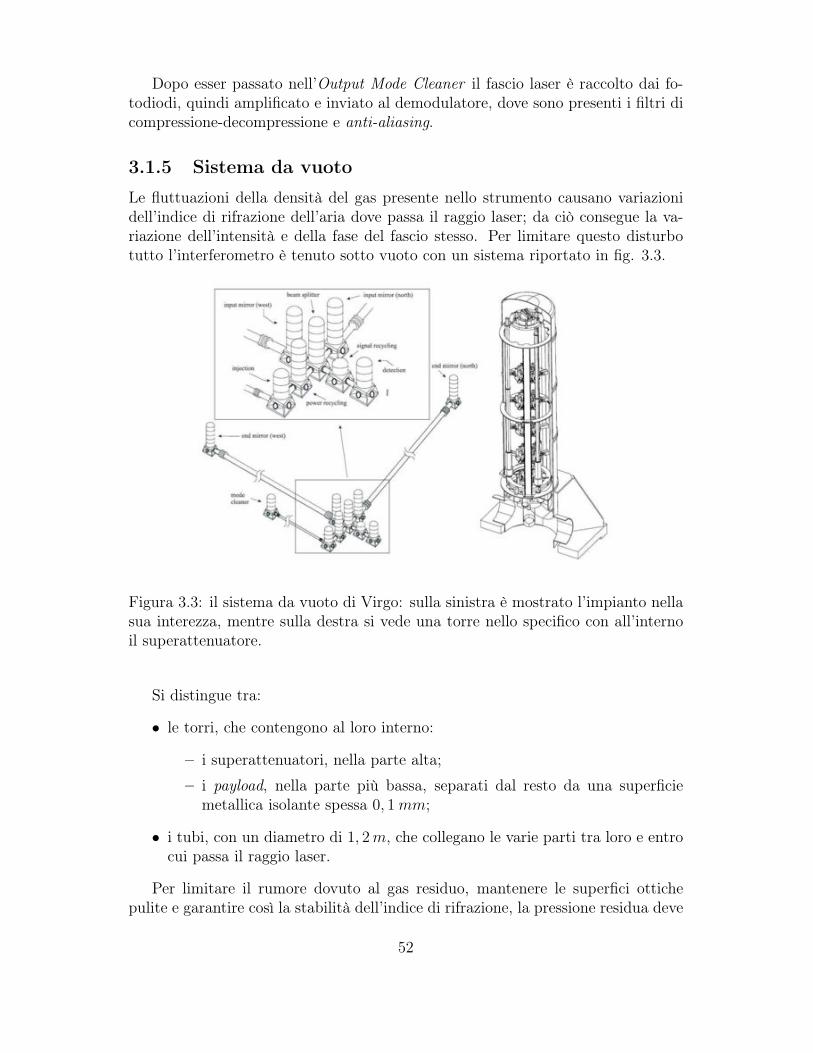
Dopo esser passato nell’Output Mode Cleaner il fascio laser è raccolto dai fo-todiodi, quindi amplificato e inviato al demodulatore, dove sono presenti i filtri dicompressione-decompressione e anti-aliasing.
3.1.5 Sistema da vuotoLe fluttuazioni della densità del gas presente nello strumento causano variazionidell’indice di rifrazione dell’aria dove passa il raggio laser; da ciò consegue la va-riazione dell’intensità e della fase del fascio stesso. Per limitare questo disturbotutto l’interferometro è tenuto sotto vuoto con un sistema riportato in fig. 3.3.
Figura 3.3: il sistema da vuoto di Virgo: sulla sinistra è mostrato l’impianto nellasua interezza, mentre sulla destra si vede una torre nello specifico con all’internoil superattenuatore.
Si distingue tra:
• le torri, che contengono al loro interno:
– i superattenuatori, nella parte alta;– i payload, nella parte più bassa, separati dal resto da una superficie
metallica isolante spessa 0, 1 mm;
• i tubi, con un diametro di 1, 2 m, che collegano le varie parti tra loro e entrocui passa il raggio laser.
Per limitare il rumore dovuto al gas residuo, mantenere le superfici ottichepulite e garantire così la stabilità dell’indice di rifrazione, la pressione residua deve
52
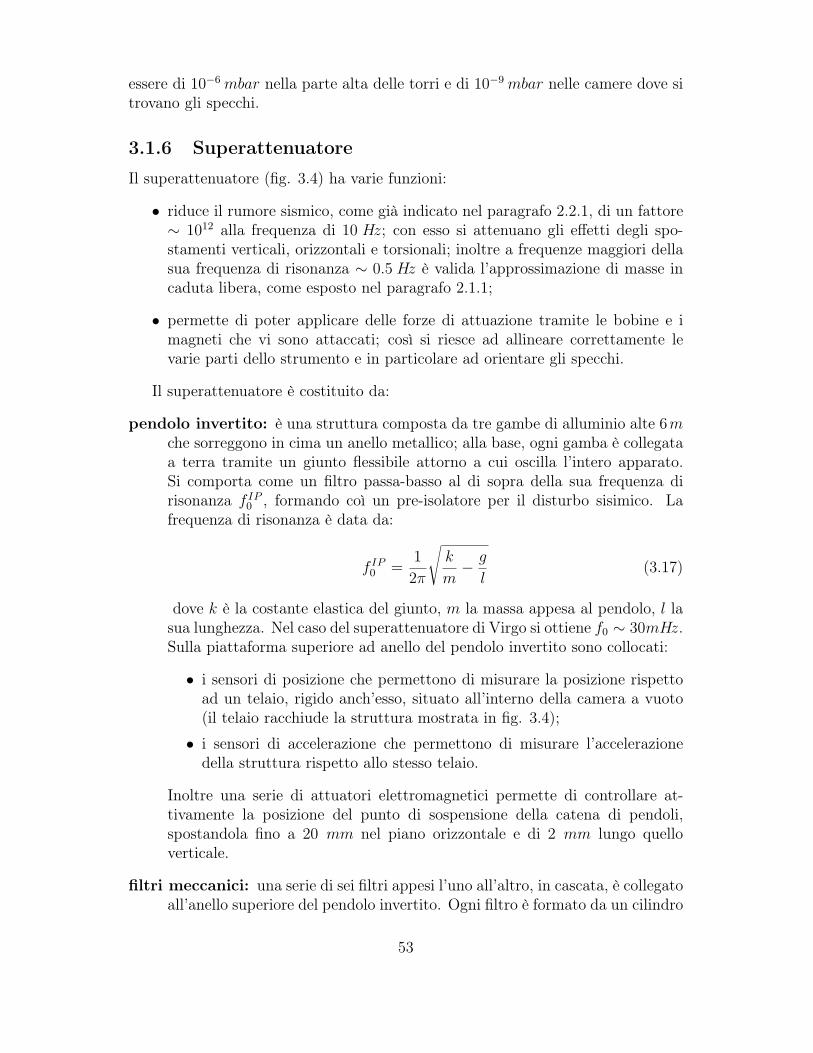
essere di 10#6 mbar nella parte alta delle torri e di 10#9 mbar nelle camere dove sitrovano gli specchi.
3.1.6 SuperattenuatoreIl superattenuatore (fig. 3.4) ha varie funzioni:
• riduce il rumore sismico, come già indicato nel paragrafo 2.2.1, di un fattore) 1012 alla frequenza di 10 Hz; con esso si attenuano gli e!etti degli spo-stamenti verticali, orizzontali e torsionali; inoltre a frequenze maggiori dellasua frequenza di risonanza ) 0.5 Hz è valida l’approssimazione di masse incaduta libera, come esposto nel paragrafo 2.1.1;
• permette di poter applicare delle forze di attuazione tramite le bobine e imagneti che vi sono attaccati; così si riesce ad allineare correttamente levarie parti dello strumento e in particolare ad orientare gli specchi.
Il superattenuatore è costituito da:
pendolo invertito: è una struttura composta da tre gambe di alluminio alte 6mche sorreggono in cima un anello metallico; alla base, ogni gamba è collegataa terra tramite un giunto flessibile attorno a cui oscilla l’intero apparato.Si comporta come un filtro passa-basso al di sopra della sua frequenza dirisonanza f IP
0 , formando coì un pre-isolatore per il disturbo sisimico. Lafrequenza di risonanza è data da:
f IP0 =
1
2"
5k
m" g
l(3.17)
dove k è la costante elastica del giunto, m la massa appesa al pendolo, l lasua lunghezza. Nel caso del superattenuatore di Virgo si ottiene f0 ) 30mHz.Sulla piattaforma superiore ad anello del pendolo invertito sono collocati:
• i sensori di posizione che permettono di misurare la posizione rispettoad un telaio, rigido anch’esso, situato all’interno della camera a vuoto(il telaio racchiude la struttura mostrata in fig. 3.4);
• i sensori di accelerazione che permettono di misurare l’accelerazionedella struttura rispetto allo stesso telaio.
Inoltre una serie di attuatori elettromagnetici permette di controllare at-tivamente la posizione del punto di sospensione della catena di pendoli,spostandola fino a 20 mm nel piano orizzontale e di 2 mm lungo quelloverticale.
filtri meccanici: una serie di sei filtri appesi l’uno all’altro, in cascata, è collegatoall’anello superiore del pendolo invertito. Ogni filtro è formato da un cilindro
53
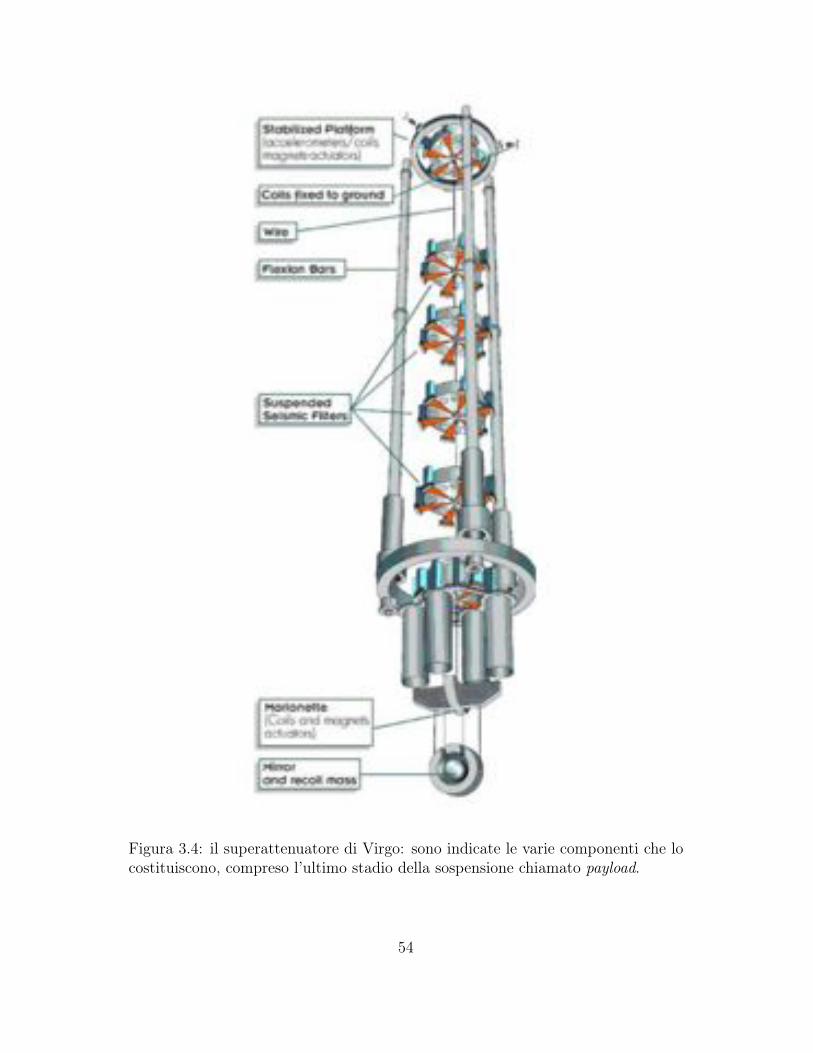
Figura 3.4: il superattenuatore di Virgo: sono indicate le varie componenti che locostituiscono, compreso l’ultimo stadio della sospensione chiamato payload.
54
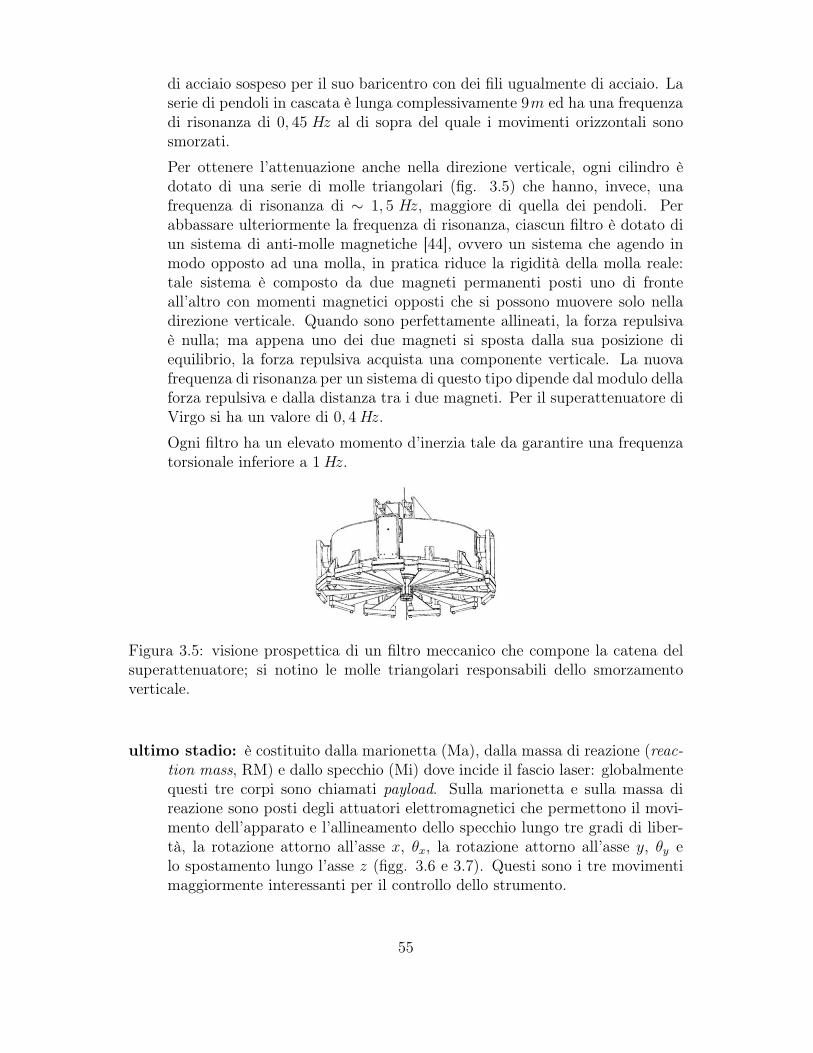
di acciaio sospeso per il suo baricentro con dei fili ugualmente di acciaio. Laserie di pendoli in cascata è lunga complessivamente 9m ed ha una frequenzadi risonanza di 0, 45 Hz al di sopra del quale i movimenti orizzontali sonosmorzati.Per ottenere l’attenuazione anche nella direzione verticale, ogni cilindro èdotato di una serie di molle triangolari (fig. 3.5) che hanno, invece, unafrequenza di risonanza di ) 1, 5 Hz, maggiore di quella dei pendoli. Perabbassare ulteriormente la frequenza di risonanza, ciascun filtro è dotato diun sistema di anti-molle magnetiche [44], ovvero un sistema che agendo inmodo opposto ad una molla, in pratica riduce la rigidità della molla reale:tale sistema è composto da due magneti permanenti posti uno di fronteall’altro con momenti magnetici opposti che si possono muovere solo nelladirezione verticale. Quando sono perfettamente allineati, la forza repulsivaè nulla; ma appena uno dei due magneti si sposta dalla sua posizione diequilibrio, la forza repulsiva acquista una componente verticale. La nuovafrequenza di risonanza per un sistema di questo tipo dipende dal modulo dellaforza repulsiva e dalla distanza tra i due magneti. Per il superattenuatore diVirgo si ha un valore di 0, 4 Hz.Ogni filtro ha un elevato momento d’inerzia tale da garantire una frequenzatorsionale inferiore a 1 Hz.
Figura 3.5: visione prospettica di un filtro meccanico che compone la catena delsuperattenuatore; si notino le molle triangolari responsabili dello smorzamentoverticale.
ultimo stadio: è costituito dalla marionetta (Ma), dalla massa di reazione (reac-tion mass, RM) e dallo specchio (Mi) dove incide il fascio laser: globalmentequesti tre corpi sono chiamati payload. Sulla marionetta e sulla massa direazione sono posti degli attuatori elettromagnetici che permettono il movi-mento dell’apparato e l’allineamento dello specchio lungo tre gradi di liber-tà, la rotazione attorno all’asse x, /x, la rotazione attorno all’asse y, /y elo spostamento lungo l’asse z (figg. 3.6 e 3.7). Questi sono i tre movimentimaggiormente interessanti per il controllo dello strumento.
55
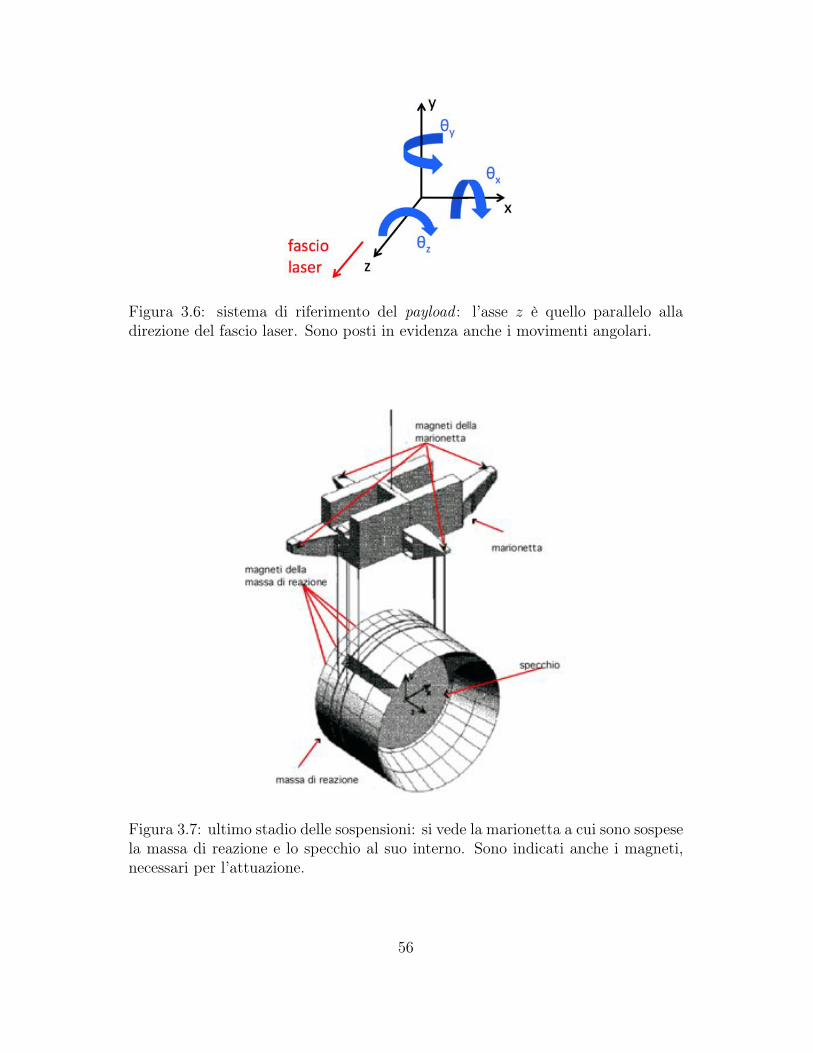
Figura 3.6: sistema di riferimento del payload : l’asse z è quello parallelo alladirezione del fascio laser. Sono posti in evidenza anche i movimenti angolari.
Figura 3.7: ultimo stadio delle sospensioni: si vede la marionetta a cui sono sospesela massa di reazione e lo specchio al suo interno. Sono indicati anche i magneti,necessari per l’attuazione.
56
3.1.7 Ultimo stadio di sospensione degli specchiL’ultimo stadio della sospensione della massa di test è spesso riferito con il nomepayload [45] in analogia all’equipaggio sperimentale trattenuto in orbita, in statoinerziale, nei satelliti dedicati alla ricerca. Nel caso di Virgo, poichè il raggiun-gimento della condizione inerziale si deve verificare nella alla desiderata banda dirivelazione delle onde gravitazionali e poichè il funzionamento dell’interferometrodipende dallo stato di moto di più specchi si ha che:
• è necessario smorzare l’e!etto dei disturbi esterni residui trasmessi dal su-perattenuatore che si manifesta al livello del payload principalmente comemovimento angolare di reazione. infatti, se si lascia il payload nello stato di-namico consentito dal superattenuatore (con controllo attivo), ogni specchiodell’interferometro uscirebbe dal punto di lavoro oscillando angolarmente dialcuni µrad e percorrendo elongazioni di alcuni µm e impedendo di fatto larivelazione di onde gravitazionali.
• è necessario regolare la posizione iniziale degli specchi (preallineamento) tra-mite un apposito sistema di controllo in modo da disporre l’interferometroin condizione di misura. Tale condizione corrisponde per Virgo a dinamichedi disallineamento di ) 1µrad e a velocità di traslazione longitudinale (lun-go la direzione del fascio laser) degli specchi di v < 1µm/s. Se le forze dicontrollo sono esercitate dall’interno della sospensione, orientando il payloadnel suo insieme rispetto al superattenuatore e lo specchio rispetto al payload,si possono usare gli stessi attuatori sia nella fase di preallineamento sia nellafase di mantenimento del punto di lavoro.
Tutto questo richiede un accurato studio in fase di progettazione meccanica.Ogni specchio è monitorato con due sistemi separati: il controllo globale, dipenden-te dalla luce dell’interferometro e il controllo locale (sez. 3.1.8), ovvero un sistemadi leve ottiche indipendente e specifico per ogni payload. I movimenti così misuratipossono essere compensati, conoscendo la funzione di trasferimento meccanica, dalsistema di attuazione composto dalle bobine e dai magneti permanenti.
Per minimizzare gli eventuali accoppiamenti elettromeccanici tra i diversi gradidi libertà e il momento delle forze applicate dal controllo è importante che:
• la massa di reazione e lo specchio siano disegnati in modo da avere il centrodi massa coincidente;
• ogni corpo sia sospeso per il suo centro di massa.
Per cui in fase di progettazione meccanica bisogna tener conto anche di questecondizioni. A questo punto possiamo fornire una descrizione minimamente detta-gliata delle caratteristiche meccaniche del payload di Virgo, dal momento che essorappresenta la base da cui si è partiti per il progetto di payload con sospensionimonolitiche.
57
La marionetta è un corpo di acciaio a forma di un parallelepipedo (fig. 3.7)ai cui lati sono posti quattro supporti per i magneti permanenti geometricamenteinterfacciati ad omologhe bobine ancorate all’ultimo filtro del superattenuatore. Alsuo interno è situato un motorino a passo micrometrico che permette di inclinarela marionetta compensando l’e!etto dovuta alla curvatura terrestre e gli eventualidisallineamenti.
La marionetta (massa pari a 108 Kg) è sospesa all’ultimo filtro del superatte-nuatore tramite un filo di acciaio (lega Maraging) dello spessore di 1, 85 mm e dilunghezza l = 1 m ancorato al suo baricentro. Inoltre sul piano baricentrale dellamarionetta sono ancorate due coppie di fili in acciaio poste a 50mm di interasse chesospendono concentricamente lo specchio (massa di 20 kg, diametro di d = 0, 35me spessore 0, 10 m) e la massa di reazione (massa 40 Kg e diametro d = 0, 45 m). Ifili di sospensione sono lunghi l = 0, 7m e hanno spessore rispettivamente 0, 3mme 0, 6 mm.
La massa di reazione ha lo scopo di sostenere le quattro bobine di attuazionediretta poste sul retro e di proteggere lo specchio dagli urti e dalle cadute, in casodi rottura dei fili di sospensione, nonchè di smorzare le oscillazioni troppo ampiedello specchio stesso: per questo ultimo motivo è dotata di quattro fermi movibilidi peek collocati sul davanti per limitare l’ampiezza delle oscillazioni.
Lo specchio è di forma cilindrica costituito da suprasil, un prodotto del silicio,su cui è depositato uno strato di materiale riflettente, detto coating. Sul bordodello specchio sono posti quattro marker ai vertici di una croce. I marker sonodei dischi di ceramica (Macor) ricoperti di cromo del diametro di 2 cm su cui sonoincisi dei puntini (generalmente 9). Se sono illuminati, ad esempio con una lampadaalogena, i marker diventano ben visibili tramite una telecamera, permettendo cosìla rilevazione della posizione dello specchio anche quando la luce del laser esce dalfotodiodo del controllo locale. In questo caso, allora, non si hanno informazionisul movimento del corpo se non con tale sistema.
Un dettaglio rilevante è relativo alla realizzazione del punto di stacco dei filidalla parte dello specchio, ottenuto tramite l’uso di speciali prismi in silice fusa eancorati tramite il processo di catalisi chimica (silicate bonding, sez. 4.1.3) alla su-perficie laterale dello specchio e opportunamente fresati per impedire lo slittamentolaterale dei fili stessi.
Nel nostro lavoro siamo interessati allo studio sperimentale del payload nelsuo insieme al fine di verificare la possibilità di integrare in esso quattro fibre insilice fusa al posto della coppia di fili di acciaio che sostengono lo specchio. Nellospecifico ciò comporta:
• lo studio dell’ottimizzazione dei modi di vibrazione del payload ;
• lo studio di eventuali criticità della funzione di trasferimento in relazione alcontrollo del payload ;
• la verifica della robustezza dell’apparato.
58
3.1.8 Sistema di controlloIl controllo di tutte le sospensioni e di tutti gli apparati è fondamentale per il cor-retto funzionamento dello strumento. Si distingue tra controllo locale e controlloglobale.
Il controllo globale si basa sui segnali di errore provenienti da tutto l’interfero-metro nel suo complesso. In fig. 3.1 sono indicati con le lettere B e Q: sono segnaliche si misurano dietro gli specchi (una frazione di luce è trasmessa) oppure sonosegnali provenienti da riflessioni secondarie, come nel caso di B5 che viene dallarifrazione del fascio principale sulla seconda faccia del beam splitter, dopo esserestato riflesso dallo specchio di ricircolo.
Il controllo globale si occupa del corretto posizionamento degli specchi lungol’asse ottico del sistema (locking, usa i segnali di errore B) [38] e della rotazionedegli specchi stessi (automatic alignment, usa i segnali di errore Q) [47].
In Virgo per il locking si utilizza il metodo di Pound-Drever-Hall, già accennatonella sez. 3.1.3. Questo metodo impone due condizioni fondamentali:
1. il fascio portante deve essere risonante sia nelle due cavità Fabry-Perot sianella cavità individuata dallo specchio di ricircolo della potenza;
2. l’uscita dell’interferometro deve essere la frangia scura.
Queste due condizioni definiscono un sistema di quattro relazioni che fissano ivalori delle distanze tra le ottiche sospese dell’interferometro (fig. 3.8).
Per l’alignment si usa la tecnica del fronte d’onda (wave front sensing techni-que) che prevede una modulazione di fase del fascio entrante e una demodulazionedel segnale che arriva al fotodiodo.
A regime non tutti i fotodiodi a quadrante vengono usati. L’allineamento èottenuto con una combinazione di segnali demodulati a 6 MHz e a 8 MHz. Unsistema indipendente, il BMS (Beam Monitoring System), è usato per il manteni-mento della posizione del fascio rispetto al sistema degli specchi. Tutti gli specchi,tranne i due di ingresso delle cavità Fabry-Perot posti sotto controllo locale, sonocontrollati da DC a ) 2 Hz in modo automatico. La deriva angolare degli spec-chi di ingresso è controllata inviando una perturbazione sinusoidale con frequenzaf < 10 Hz sugli specchi terminali e minimizzandone l’e!etto sul segnale ricombi-nato in uscita, la frangia scura (fig. 3.9).
Il controllo locale, invece, si occupa di monitorare la posizione e gli spostamentidi singole parti dell’interferometro; in particolare si controllano le singole superficiottiche e le marionette che le sospendono con un sistema di laser, fotodiodi etelecamere indipendente da quello globale [48].
La funzione principale del controllo locale è quella di smorzare i modi angolarie longitudinali che giungono dal superattenuatore fino alla massa di test e di ef-fettuare il recupero della posizione allineata senza provocare l’eccitazione dei moti
59
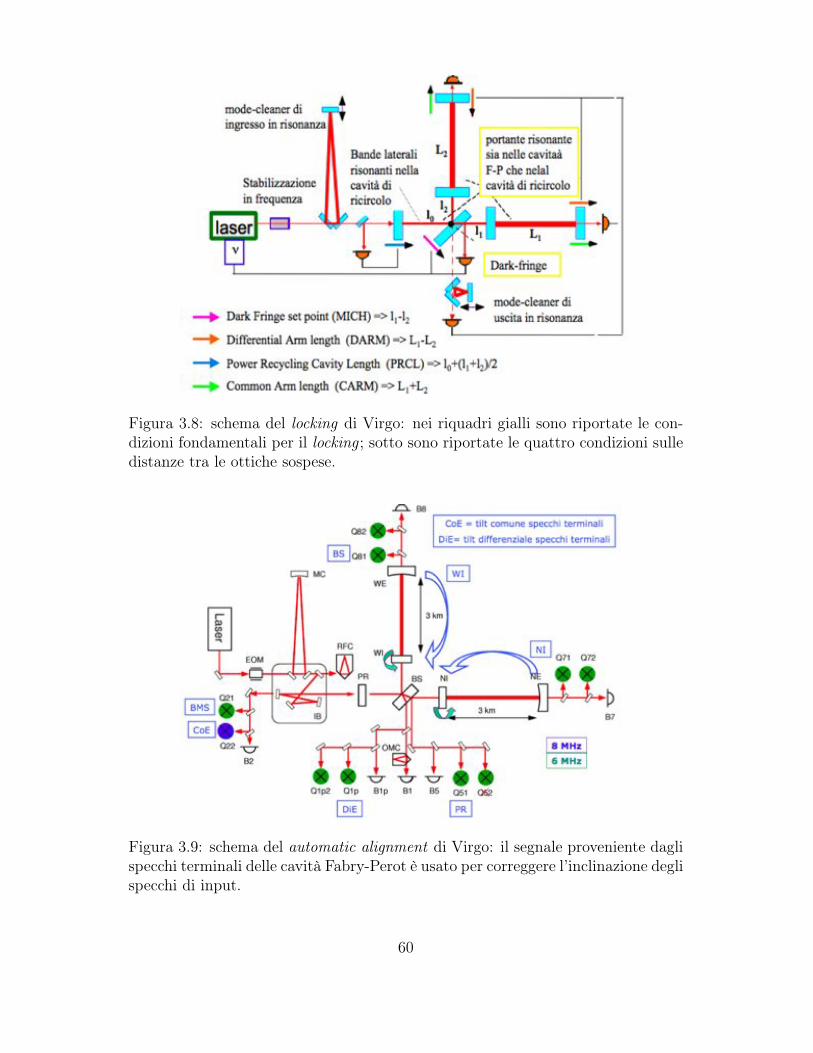
Figura 3.8: schema del locking di Virgo: nei riquadri gialli sono riportate le con-dizioni fondamentali per il locking ; sotto sono riportate le quattro condizioni sulledistanze tra le ottiche sospese.
Figura 3.9: schema del automatic alignment di Virgo: il segnale proveniente daglispecchi terminali delle cavità Fabry-Perot è usato per correggere l’inclinazione deglispecchi di input.
60
interni del payload. Per adempiere a questo compito si utilizzano due leve ottiche,una incidente sullo specchio e l’altra incidente su uno specchio ausiliario ancoratoalla marionetta. Inoltre il sistema è provvisto di un ulteriore segnale derivantedall’immagine dello specchio, usato per le oscillazioni più ampie.
Questo sistema permette di controllare lo specchio gerarchicamente su unavasta scala dinamica (50"100µrad per gli angoli e 1µm"10mm per le traslazioni).
Tramite la misura della posizione del fascio laser sul rivelatore, si risale allaposizione dello specchio nello spazio.
Torneremo a discutere del sistema di controllo locale nella sez. 4.2.2, dato cheè stato usato per il test della sospensione monolitica uno molto simile a quelloimplementato a Virgo.
3.1.9 La curva di sensibilità di VirgoLa curva di sensibilità indica l’intensità minima del segnale gravitazionale misura-bile da un interferometro, nell’intervallo di frequenze di interesse.
Per Virgo la curva di sensibilità teorica, stimata dalle varie densità spettralidei rumori è presentata in fig. 3.10 [51]. Ogni fonte di rumore dà il suo contributo,indicato con un diverso tratto. Si noti che a basse frequenze domina il rumoresismico mentre ad alte frequenze ci sono i picchi dati dai modi di violino delrumore termico e lo shot noise.
Questa curva teorica va confrontata con quella che si è ricavata sperimental-mente in Virgo nel corso della sua messa a punto (fig. 3.11); dalla sua accensionead oggi si sono e!ettuate varie misure in diverse configurazioni e i valori della cur-va progressivamente sono stati abbassati per tendere alla stima teorica. I valoridella densità spettrale riportati su questa curva sono ottenuti dalle fluttuazionidi posizione degli specchi ed equivalgono al valore misurato di rumore presentenell’interferometro.
3.2 VirgoAdvancedCon il progetto VirgoAdvanced si vuole portare l’interferometro Virgo ad essereuno strumento di seconda generazione, in modo da aumentare il volume di universorilevabile di un fattore 10: Virgo può misurare il segnale proveniente da un sistemabinario di stelle di neutroni distante al massimo 11 Mpc, mentre con VirgoAdvan-ced si arriverà a 150 Mpc. In particolare la sensibilità di VirgoAdvanced sarà diun’ordine di grandezza maggiore di quella attuale su tutta la banda di rivelazione.Per arrivare alla configurazione prevista per VirgoAdvanced si passerà per una faseintermedia denominata Virgo+.
Come detto nella sez. 2.2, la sensibilità nominale di Virgo è limitata al momentodallo shot noise ad alte frequenze e dal rumore termico degli specchi a frequenzeintermedie.
61
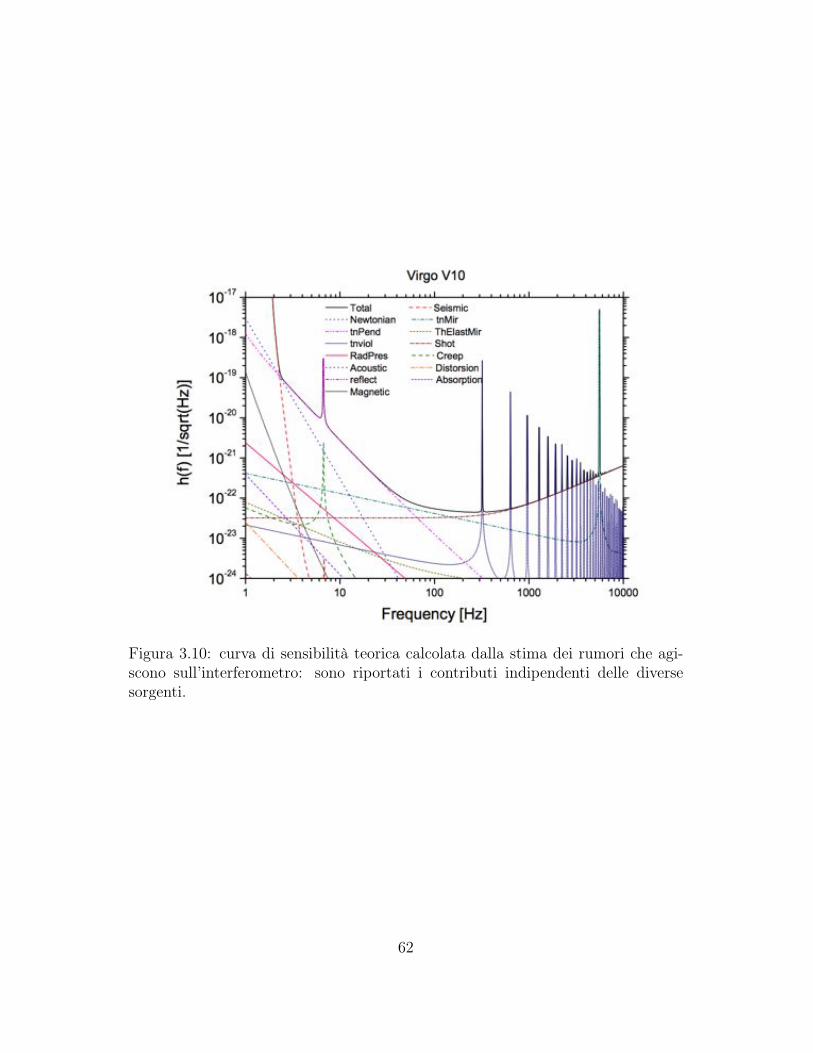
Figura 3.10: curva di sensibilità teorica calcolata dalla stima dei rumori che agi-scono sull’interferometro: sono riportati i contributi indipendenti delle diversesorgenti.
62
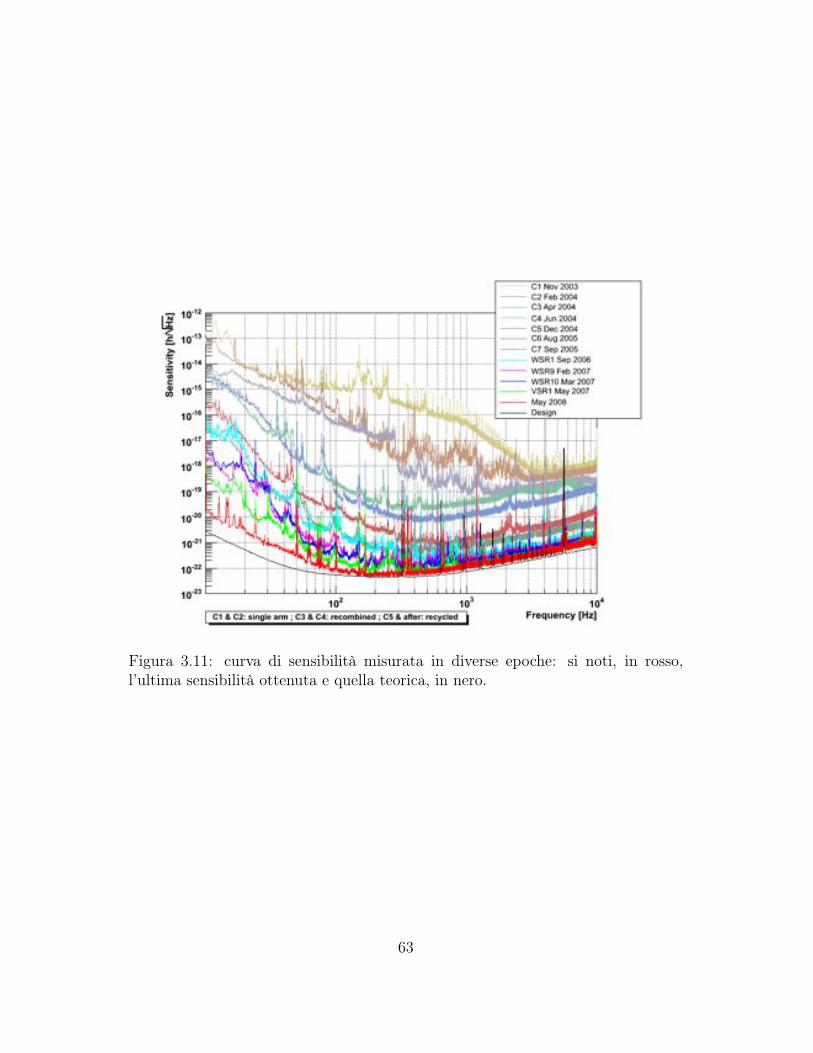
Figura 3.11: curva di sensibilità misurata in diverse epoche: si noti, in rosso,l’ultima sensibilità ottenuta e quella teorica, in nero.
63
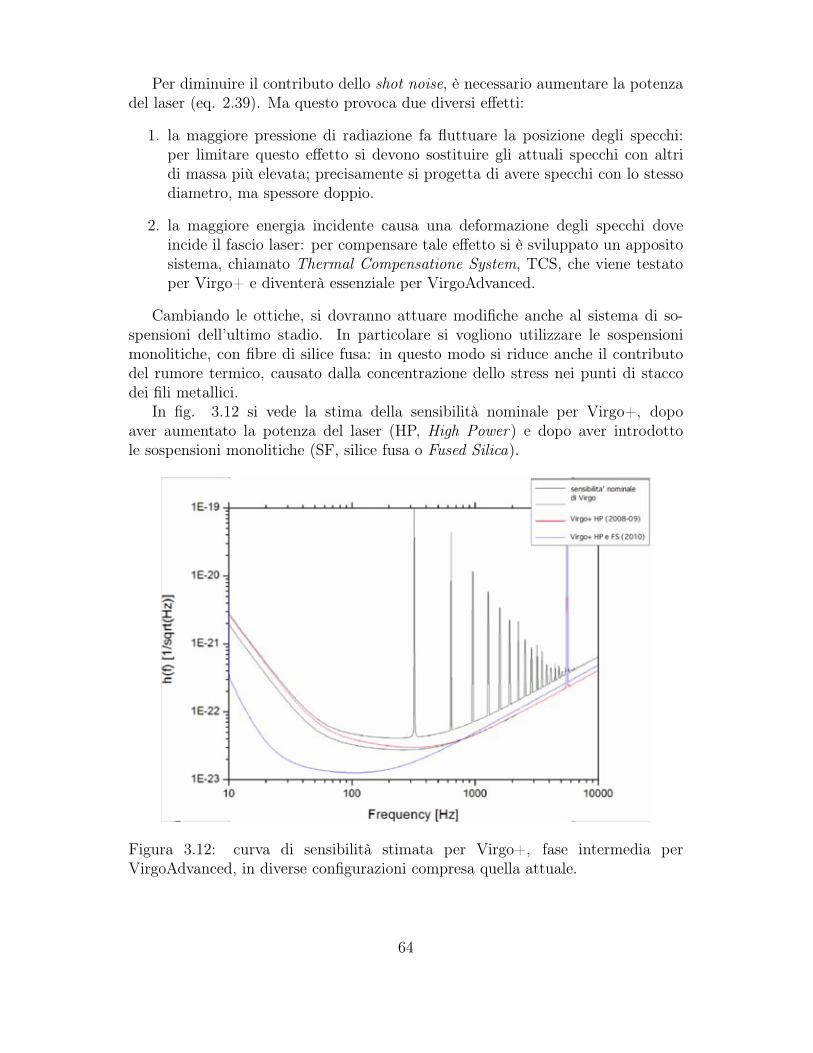
Per diminuire il contributo dello shot noise, è necessario aumentare la potenzadel laser (eq. 2.39). Ma questo provoca due diversi e!etti:
1. la maggiore pressione di radiazione fa fluttuare la posizione degli specchi:per limitare questo e!etto si devono sostituire gli attuali specchi con altridi massa più elevata; precisamente si progetta di avere specchi con lo stessodiametro, ma spessore doppio.
2. la maggiore energia incidente causa una deformazione degli specchi doveincide il fascio laser: per compensare tale e!etto si è sviluppato un appositosistema, chiamato Thermal Compensatione System, TCS, che viene testatoper Virgo+ e diventerà essenziale per VirgoAdvanced.
Cambiando le ottiche, si dovranno attuare modifiche anche al sistema di so-spensioni dell’ultimo stadio. In particolare si vogliono utilizzare le sospensionimonolitiche, con fibre di silice fusa: in questo modo si riduce anche il contributodel rumore termico, causato dalla concentrazione dello stress nei punti di staccodei fili metallici.
In fig. 3.12 si vede la stima della sensibilità nominale per Virgo+, dopoaver aumentato la potenza del laser (HP, High Power) e dopo aver introdottole sospensioni monolitiche (SF, silice fusa o Fused Silica).
Figura 3.12: curva di sensibilità stimata per Virgo+, fase intermedia perVirgoAdvanced, in diverse configurazioni compresa quella attuale.
64
3.2.1 Le modifiche di VirgoAdvancedLe modifiche che si vogliono apportare a Virgo non riguardano solo gli apparatisopra descritti, ma in generale tutto lo strumento [14]:
configurazione ottica: in Virgo è presente lo specchio per il ricircolo della poten-za riflessa dall’interferometro; in VirgoAdvanced si vuole aggiungere ancheun’altra superficie ottica per il ricircolo del segnale (Signal Recycling, RC)sospendendo uno specchio tra il beam splitter e il banco di rivelazione. Inquesto modo sarà possibile modificare la forma della curva di sensibilità se-lettivamente in frequenza per ottimizzare lo strumento alla rivelazione diparticolari tipi di sorgenti astrofisiche.La potenza del laser sarà aumentata da 20W a 200W , mantenendo la stessalunghezza d’onda della luce. In questo modo anche la potenza che arriva sulleottiche sarà maggiore: per il beam splitter si passerà da 4kW a 760kW . Allo-ra anche il sistema di iniezione dovrà essere in grado di supportare l’aumentodi potenza, con un opportuno modulatore elettro-ottico, EOM.Per quanto riguarda il sistema di rivelazione, si progetta di porre i fotodiodinel vuoto e di spostare il segnale misurato dalla modulazione nelle radio-frequenze alla lettura in DC. In questo modo si elimina il rumore prodottooperando la demodulazione.
specchi: come già accennato, a causa dell’incremento di potenza nella cavità in-terferometrica che aumenta anche la pressione di radiazione, gli specchi do-vranno essere più massicci: si raddoppierà il loro spessore, da 10 cm a 20 cme il loro peso, da 21 Kg a 42 Kg. Per ridurre il rumore termico il depositosuperficiale di ogni specchio, il coating, dovrà avere minori perdite meccani-che: in Virgo il coating è formato dal composto chimico Ta2O5, mentre perVirgoAdvanced sarà di titanio drogato con lo stesso composto. Il coating de-termina il fattore di qualità dello specchio e conseguentemente le perdite dipotenza all’interno dello strumento (quindi anche la potenza immagazzinatagrazie allo specchio di ricircolo).
TCS: (già in Virgo+) l’assorbimento di luce da parte delle superfici ottiche cau-sa la loro deformazione e conseguentemente anche la distorsione del fronted’onda; gli e!etti di tale processo sono trascurabili per Virgo, ma non lopossono più essere per VirgoAdvanced, data la maggiore potenza incidente.Si è pensato, allora, ad un sistema di compensazione termica, il TCS: con-siste in due laser a CO2 posti localmente che procurano una deformazionead anello circolare sugli specchi di input (NI e WI), oppure di un sistema diirradiazione analogo incorporato nella massa di reazione.
sistema di sospensione: il superattenuatore non è direttamente interessato amodifiche strutturali, essendo già adatto alla sensibilità che si vuole raggiun-gere per VirgoAdvanced. In ogni caso, si vuole aggiungere un’ulteriore leva
65
ottica per il controllo locale del grado di libertà /z, attualmente non moni-torato. Questo permette di ottenere una maggiore robustezza del sistema,soprattutto nei giorni ventosi in cui la pressione dell’aria sugli edifici fa muo-vere il terreno sotto di essi e attraverso gli inevitabili accoppiamenti che simanifestano nel sistema traduce alcuni modi di pendolo delle catene in modiangolari del payload.L’ultimo stadio delle sospensioni deve essere modificato per accogliere glispecchi più spessi e gli anelli riscaldati del TCS. In aggiunta gli attacchi deifili di sospensione devono essere adattati per le fibre monolitiche: le perditemeccaniche devono essere ridotte e il punto di piegatura delle fibre devegiacere sul piano passante per il centro di massa del sistema specchio-massadi reazione, in modo da ridurre gli accoppiamenti tra i diversi gradi di libertà.Il payload includerà anche un nuovo elemento, la massa di reazione del-la marionetta, Marionette Reaction Mass, MRM: tale elemento sostituiràil prolungamento meccanico rigido attaccato all’ultimo elemento della cate-na atto a sostenere gli attuatori della marionetta. La MRM sarà utile persemplificare l’istallazione del payload.
sistema da vuoto: il valore attuale della pressione del gas residuo è di 2·10#7mbar.Ma per la sensibilità di VirgoAdvanced si richiede un fattore 100 in più, finoad un valore di pressione di 10#9 mbar.
infrastrutture: per ridurre il contributo dei rumori dati dall’attività umana neipressi dello strumento e dai macchinari lì presenti (come ad esempio quelloresponsabile del sistema di condizionamento), si è deciso di sostituirli conapparecchiature più silenziose, sia dal punto di vista acustico, sia dal punto divista sismico e di spostarle all’esterno delle stanze dove si trova l’esperimento,in un edificio dedicato.
3.2.2 Le sospensioni monoliticheL’introduzione delle sospensioni monolitiche in VirgoAdvanced ha lo scopo di ri-durre il rumore termico associato al modo di pendolo (movimento nella direzionez).
A causa del moto browniano delle particelle, la temperatura di un corpo nonè una grandezza distribuita uniformemente, anche se il corpo si trova in equilibriotermodinamico ad esempio rispetto ad un bagno termico: la misura della tempera-tura che si ottiene è un valore medio. Allora le fluttuazioni di temperatura presentiprovocano moti di espansione-contrazione all’interno di un materiale, dipendentidal coe"ciente di espansione termica, con conseguenti dissipazioni. Questo e!ettoprende nome di smorzamento termoelastico (sez. 2.2.5): il suo contributo, datodal moto browniano, è maggiore rispetto a quello causato dall’aumento di energiaper assorbimento di fotoni incidenti.
66
Si è dimostrato [52, 53] che, nonostante tali dissipazioni siano inevitabili, lasilice fusa ha una dissipazione meccanica interna e un coe"ciente di espansionetermica (si ricordi l’eq. 2.62) minore rispetto a quelli dell’acciaio. Quindi le fibredi silice fusa possono sostituire quelle di acciaio che si usano attualmente in Virgoper la sospensione dell’ultimo stadio del superattenuatore. Ciò permette di ridurredi un ordine di grandezza il contributo del rumore termico nella banda di frequenzedi interesse [54].
Nello scegliere la silice fusa tra altri materiali possibili, si sono considerate duecaratteristiche:
• la silice fusa, se opportunamente trattata, ha un carico di rottura doppiorispetto all’acciaio;
• dato che è un materiale amorfo, durante il processo di saldatura, la silice nonaltera le sue proprietà meccaniche e termiche.
Le fibre di SF, una volta prodotte, devono essere ancorate agli specchi tra-mite appositi attacchi ai quali esse vengono saldate. Secondo l’attuale progettosviluppato dalla collaborazione Virgo gli attacchi sono incollati chimicamente al-lo specchio con la tecnica del silicate bonding (sez. 4.1.3) successivamente allasaldatura.
In questo modo lo specchio, cli attacchi verticali e le fibre, tutti dello stessomateriale, costituiscono un unico insieme “monolitico”, riducendo la frizione internae il rumore termico che nascono dal contatto tra materiali diversi.
D’altra parte le fibre di silice fusa presentano degli inconvenienti:
• il loro carico di rottura dipende dai difetti della struttura cristallina e dallespaccature generate in seguito ad urti;
• le fibre mostrano una specie di invecchiamento dovuto all’umidità dell’am-biente in cui si trovano.
Perciò è importante non far venire in contatto le fibre con nessun altro corpodurante la fase di produzione e montaggio e monitorare continuamente le condizioniambientali.
67
Capitolo 4
Il prototipo delle sospensionimonolitiche e il sistema di test
Le sospensioni monolitiche, già in uso nell’interferometro GEO600, sono necessarieper ridurre il contributo del rumore termico associato alle dissipazioni termoela-stiche. In questo modo ci si aspetta, secondo la fig. 3.12, che ciò contribuiscaa migliorare la sensibilità di Virgo dove essa sia limitata dal rumore intrinsecodell’ultimo stadio di sospensione.
In questo capitolo parleremo della realizzazione di una sospensione monolitica:dalla produzione delle fibre di silice fusa, alla loro caratterizzazione e al loro mon-taggio sullo specchio. Analizzeremo poi il payload per questo tipo di sospensioni eil sistema di controllo locale descrivendo la strumentazione necessaria per le misuredi posizione e l’acquisizione dei dati.
4.1 Realizzazione di una sospensione monoliticaLa silice fusa (SF) è un composto del silicio (SiO2) con struttura vetrosa: la suatemperatura di transizione vetrosa, oltre la quale un materiale amorfo si com-porta come un solido vetroso, dipende dalla storia specifica del materiale e dallavelocità di vetrificazione. Questa temperatura si aggira intorno ai 2000 K: quin-di riscaldando una barretta di silice fusa fino a questo valore di temperatura èpossibile fonderla e renderla altamente viscosa. A questo punto si può deformareplasticamente e allungandone il profilo in fibre, proprio come si fa per il vetro.
Tipicamente si usa la silice fusa per creare fibre ottiche allo scopo di trasmet-tere dati; ma per la realizzazione di una sospensione monolitica, le fibre devonoessere prodotte appositamente al fine di garantire le caratteristiche fisiche e geome-triche necessarie. Vediamo come si producono le fibre di SF tramite una macchinadedicata e come si misurano le grandezze caratteristiche di ogni fibra
68

4.1.1 La produzione delle fibreLe fibre sono prodotte a partire da delle barrette cilindriche di SF di alta purezza(Herasil o Suprasil, reperibili in commercio): ogni barretta è lunga ) 10 cm ed haun diametro di 1, 5 mm.
Per ottenere una fibra si deve fondere la parte centrale della barretta e suc-cessivamente tirare le sue due estremità in versi opposti, così da allungarla fino alraggiungimento delle dimensioni volute. Per Virgo sono stati istallati due diversimacchinari per la produzione delle fibre:
1. la macchina H2"O2, interamente sviluppata presso Virgo; con questa appa-recchiatura la temperatura di vetrificazione è raggiunta tramite l’esposizionedella barretta alle fiamme di H2 "O2;
2. la macchina laser CO2, sviluppata all’Università di Glasgow (per GEO) esuccessivamente modificata presso Virgo; in questo caso il raggiungimento ditale temperatura è e!ettuato tramite l’esposizione alla luce di un laser CO2.
Con il secondo metodo si riesce ad ottenere fibre con un profilo più uniforme ein migliori condizioni di pulizia, il che garantisce in principio un risultato più buonoin termini di riproducibilità dei parametri meccanici delle stesse e di robustezza.
La macchina CO2 permette una precisa localizzazione del punto di riscalda-mento e di conseguenza un maggior controllo della produzione e del profilo dellafibra.
La barretta di silice fusa è inizialmente pulita con alcool isopropilico; poi è sal-data alla sua estremità inferiore ad un’ancora e alla sua estremità superiore ad uncono entrambi in SF e necessari per il montaggio sullo specchio. Successivamenteè collocata nella machina CO2 (fig. 4.1) tramite due morsetti (clamp), uno fisso eduno solidale con il braccetto movibile dell’apparecchiatura. A questo punto il laserCO2, con una potenza di 100W , può essere messo in funzione: il fascio laser vienefatto riflettere su uno specchio rotante inclinato a 45& posto proprio al di sotto delmorsetto fisso che lo convoglia su due specchi conici ricoperti da un deposito di oro.Lo specchio conico superiore è ancorato ad un secondo braccetto che si muove convelocità vdown. Grazie allo specchio rotante e ai due specchi conici il fascio lasercolpisce la barretta continuamente, assicurando un riscaldamento locale omogeneo.
Prima del tiraggio della fibra si procede alla fase di annealing : usando il bracciomovibile inferiore, il fascio laser attraversa e fonde progressivamente la barrettain tutta la sua lunghezza. In questo modo si eliminano gli eventuali difetti e lefratture che si possono essere prodotte nella silice fusa durante il trasporto o nellalavorazione: questi difetti riducono criticamente il carico di rottura delle fibre insilice fusa.
Il tiraggio della fibra avviene subito di seguito: il laser fonde la barretta e ilbraccetto superiore si sposta verso l’alto a velocità vup ottenendo una fibra sottile.Contemporaneamente il punto di fusione, ovvero il punto in cui incide il fascio lasersulla bacchetta, è spostato verso il basso, permettendo così che materiale appena
69
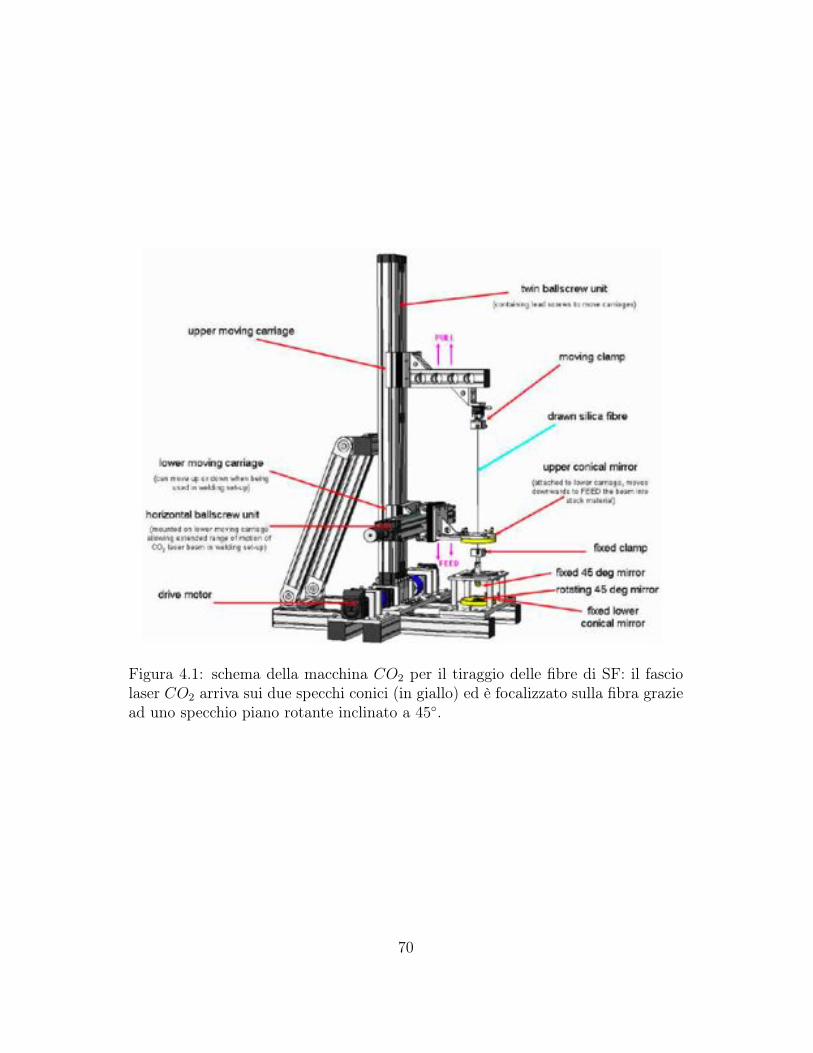
Figura 4.1: schema della macchina CO2 per il tiraggio delle fibre di SF: il fasciolaser CO2 arriva sui due specchi conici (in giallo) ed è focalizzato sulla fibra graziead uno specchio piano rotante inclinato a 45&.
70

fuso venga tirato nell’immediato: tutto ciò è eseguito da un processo automaticoa controllo numerico.
Le velocità vup e vdown di tiraggio di una fibra determinano il suo spessore equindi il suo profilo: per l’equazione di continuità, infatti, si ha che il flusso dimateriale nella fibra deve rimanere costante. Per cui:
vupS1 = vdownS2 (4.1)
dove S1 e S2 sono le sezioni alle due estremità della fibra. Il profilo delle fibre,quindi conseguentemente la velocità di tiraggio, deve essere scelto in maniera ac-curata, minimizzando il contributo del rumore termico. Si è visto [56] che il profilomaggiormente adatto allo scopo di minimizzare il gradiente della forza applicatanella parte iniziale e finale delle fibre è quello a campana, con un collo abbastanzalungo e più spesso rispetto alla sezione del resto della fibra (fig. 4.2).
Figura 4.2: profili dei colli di diverse fibre riportate in vari colori: la riproducibilitàè accettabile.
Con la macchina laser CO2 è possibile tirare fibre con lo stesso profilo entro unaprecisione di 10µm, come si può verificare a posteriori grazie alle misure e!ettuatecon un profilometro. La sezione più piccola di una fibra, lontana dai colli, risultaessere di 285± 10 µm.
4.1.2 La caratterizzazione delle fibreUna volta prodotte, le fibre sono caratterizzate: si deve fare una prova di robu-stezza, misurare la posizione del punto di piegamento e altri parametri meccanicifondamentali.
Ogni singola fibra dovrà sostenere un carico di circa 5 kg, dato che lo specchioha massa ) 20 kg1 ed è sospeso con quattro fili. A questo fine si aggancia allafibra un carico di 10kg: il peso è rilasciato gradualmente e lo si mantiene per circa30 minuti. Se la fibra supera questa prova, è selezionata per le sospensioni e si
1Si ricordi che per VirgoAdvanced si pensa di raddoppiare la massa dello specchio.
71

procede con le altre misurazioni.
Una grandezza da misurare è la lunghezza netta della fibra2: la macchina CO2
produce fibre della stessa lunghezza con una precisione di 0, 2 mm, ma per il si-stema di controllo locale e per la modellizzazione meccanica dell’apparato serveuna misura più accurata. Le fibre di SF sono generalmente lunghe ) 70 cm, cheè la distanza tipica tra il baricentro della marionetta e quello dello specchio nelpayload standard di Virgo: si usa allora un apposito regolo di 70 cm di lunghezzae si misura la di!erenza con un calibro a cursore.
Un’altra grandezza da misurare è la posizione del punto di piegamento . cherappresenta la distanza tra l’estremità della fibra e il punto dove essa si piegadurante il modo di pendolo (fig. 4.3).
Figura 4.3: schema della deformazione di una fibra sottoposta al modo di pendolo:la massa appesa è considerata puntiforme.
Infatti la conoscenza della posizione dei punti di piegamento è fondamentaleper il sistema di controllo delle sospensioni dato che questa quantità rientra nellafunzione di trasferimento meccanica del sistema. Per minimizzare gli e!etti del-l’accoppiamento esistente tra i vari gradi di libertà (in particolare tra il movimentotraslatorio nella direzione z e quello torsionale dell’angolo /x, fig. 3.6) il punto dipiegamento della fibra deve essere posto sul piano orizzontale passante per il centrodi massa del corpo sospeso.
Supponiamo di avere una fibra perfettamente cilindrica lunga complessivamenteL a cui è appesa una massa M puntiforme la cui forza peso è bilanciata dalla
2Si noti che una volta sotto carico la fibra tende ad allungarsi: per un carico di 5, 280 kg simisura un allungamento di 7, 45 mm di cui occorre tenere conto nella progettazione del payload.
72
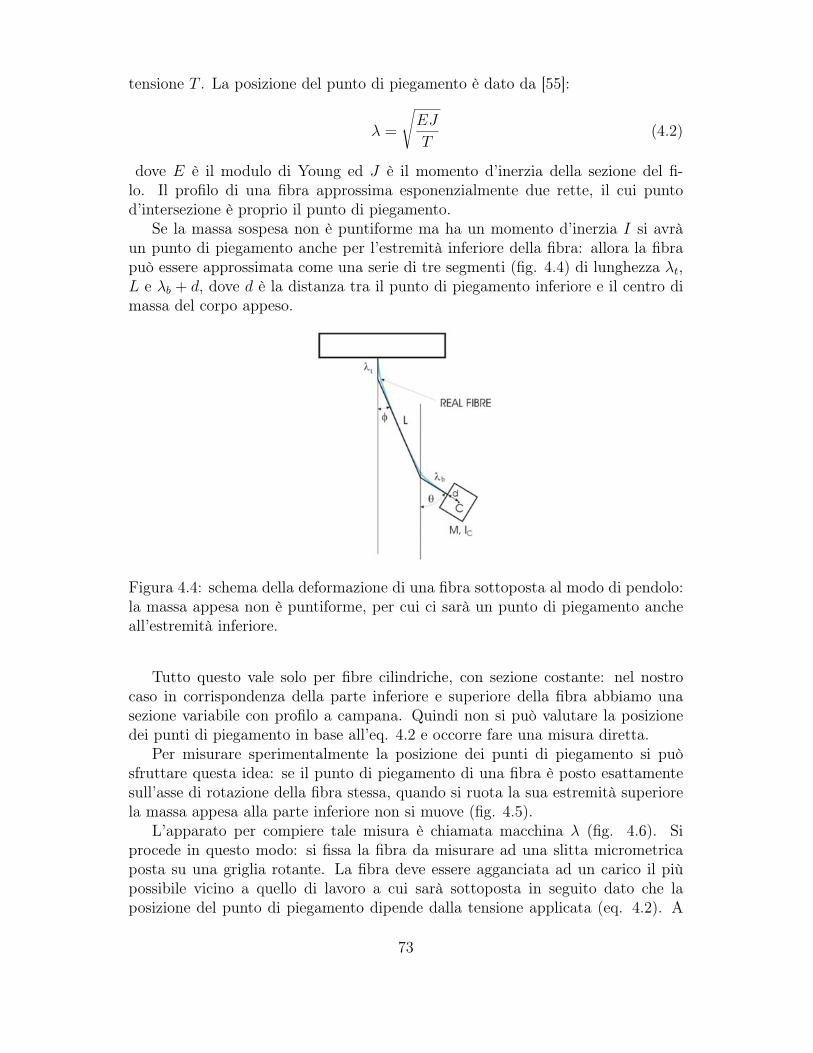
tensione T . La posizione del punto di piegamento è dato da [55]:
. =
5EJ
T(4.2)
dove E è il modulo di Young ed J è il momento d’inerzia della sezione del fi-lo. Il profilo di una fibra approssima esponenzialmente due rette, il cui puntod’intersezione è proprio il punto di piegamento.
Se la massa sospesa non è puntiforme ma ha un momento d’inerzia I si avràun punto di piegamento anche per l’estremità inferiore della fibra: allora la fibrapuò essere approssimata come una serie di tre segmenti (fig. 4.4) di lunghezza .t,L e .b + d, dove d è la distanza tra il punto di piegamento inferiore e il centro dimassa del corpo appeso.
Figura 4.4: schema della deformazione di una fibra sottoposta al modo di pendolo:la massa appesa non è puntiforme, per cui ci sarà un punto di piegamento ancheall’estremità inferiore.
Tutto questo vale solo per fibre cilindriche, con sezione costante: nel nostrocaso in corrispondenza della parte inferiore e superiore della fibra abbiamo unasezione variabile con profilo a campana. Quindi non si può valutare la posizionedei punti di piegamento in base all’eq. 4.2 e occorre fare una misura diretta.
Per misurare sperimentalmente la posizione dei punti di piegamento si puòsfruttare questa idea: se il punto di piegamento di una fibra è posto esattamentesull’asse di rotazione della fibra stessa, quando si ruota la sua estremità superiorela massa appesa alla parte inferiore non si muove (fig. 4.5).
L’apparato per compiere tale misura è chiamata macchina . (fig. 4.6). Siprocede in questo modo: si fissa la fibra da misurare ad una slitta micrometricaposta su una griglia rotante. La fibra deve essere agganciata ad un carico il piùpossibile vicino a quello di lavoro a cui sarà sottoposta in seguito dato che laposizione del punto di piegamento dipende dalla tensione applicata (eq. 4.2). A
73

Figura 4.5: schema di funzionamento della macchina .: in a il punto di piegamentogiace sull’asse di rotazione (il carico non si muove dalla sua posizione), in b e in cinvece il punto di piegamento non sta sull’asse di rotazione e il corpo si sposta.
questo punto si mette in funzione la griglia che ruota alla frequenza di pendolo delsistema e si misura la posizione dell’estremo inferiore della fibra tramite l’ombrache esso proietta su un sensore shadowmeter.
Muovendo la slitta micrometrica si cerca di minimizzare il movimento dell’e-stremo inferiore della fibra sospesa e quindi di trovare il punto di piegamento. Unavolta individuato, si misura la distanza tra l’asse di rotazione (segnalato con un’ap-posita barra) e l’estremità della fibra: questo valore sarà la posizione del punto dipiegamento.
Si è trovato [56] che per delle fibre lunghe 74 cm il punto di piegamento supe-riore è a distanza 36, 64± 0, 04 mm. L’incertezza è data dal residuo di oscillazionemisurato quando il punto di piegamento è stato identificato.
Gli ultimi parametri meccanici di rilevanza sono la frequenza del primo mododi violino e la frequenza del modo di oscillazione longitudinale lungo l’asse verticaley (bouncing mode).
La frequenza del primo modo di violino è data dall’espressione:
f1 =1
2L
5T
S#(4.3)
dove S è la sezione del filo, L la sua lunghezza, # la sua densità lineare e T latensione a cui è sottoposto. Si può misurare colpendo delicatamente il morsettosuperiore che sostiene la fibra e osservando la trasformata di Fourier delle oscilla-zioni che essa compie dopo essere stato eccitata. Per le fibre di 74 cm si è trovatoche f1 = 444± 1 Hz.
La frequenza del modo longitudianale è espressa da:
fl =1
2"
5k
M=
1
2"
5ES
ML(4.4)
74

Figura 4.6: macchina . con i suoi vari componenti.
75
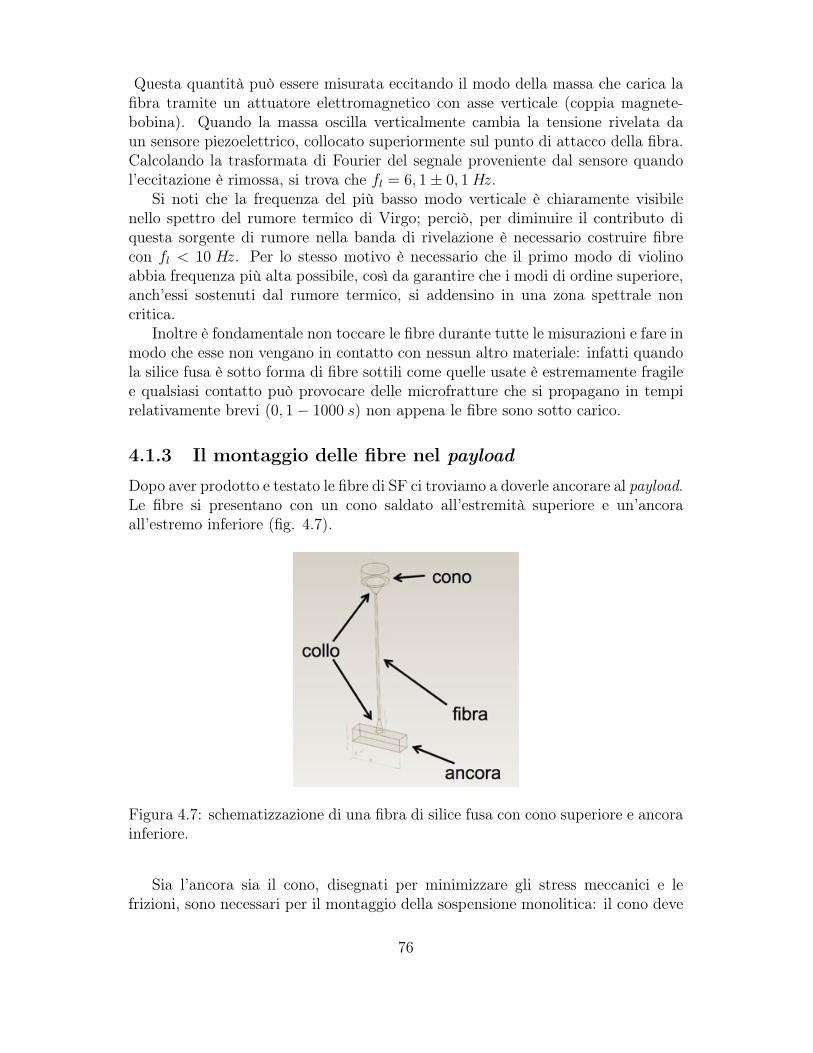
Questa quantità può essere misurata eccitando il modo della massa che carica lafibra tramite un attuatore elettromagnetico con asse verticale (coppia magnete-bobina). Quando la massa oscilla verticalmente cambia la tensione rivelata daun sensore piezoelettrico, collocato superiormente sul punto di attacco della fibra.Calcolando la trasformata di Fourier del segnale proveniente dal sensore quandol’eccitazione è rimossa, si trova che fl = 6, 1± 0, 1 Hz.
Si noti che la frequenza del più basso modo verticale è chiaramente visibilenello spettro del rumore termico di Virgo; perciò, per diminuire il contributo diquesta sorgente di rumore nella banda di rivelazione è necessario costruire fibrecon fl < 10 Hz. Per lo stesso motivo è necessario che il primo modo di violinoabbia frequenza più alta possibile, così da garantire che i modi di ordine superiore,anch’essi sostenuti dal rumore termico, si addensino in una zona spettrale noncritica.
Inoltre è fondamentale non toccare le fibre durante tutte le misurazioni e fare inmodo che esse non vengano in contatto con nessun altro materiale: infatti quandola silice fusa è sotto forma di fibre sottili come quelle usate è estremamente fragilee qualsiasi contatto può provocare delle microfratture che si propagano in tempirelativamente brevi (0, 1" 1000 s) non appena le fibre sono sotto carico.
4.1.3 Il montaggio delle fibre nel payloadDopo aver prodotto e testato le fibre di SF ci troviamo a doverle ancorare al payload.Le fibre si presentano con un cono saldato all’estremità superiore e un’ancoraall’estremo inferiore (fig. 4.7).
Figura 4.7: schematizzazione di una fibra di silice fusa con cono superiore e ancorainferiore.
Sia l’ancora sia il cono, disegnati per minimizzare gli stress meccanici e lefrizioni, sono necessari per il montaggio della sospensione monolitica: il cono deve
76
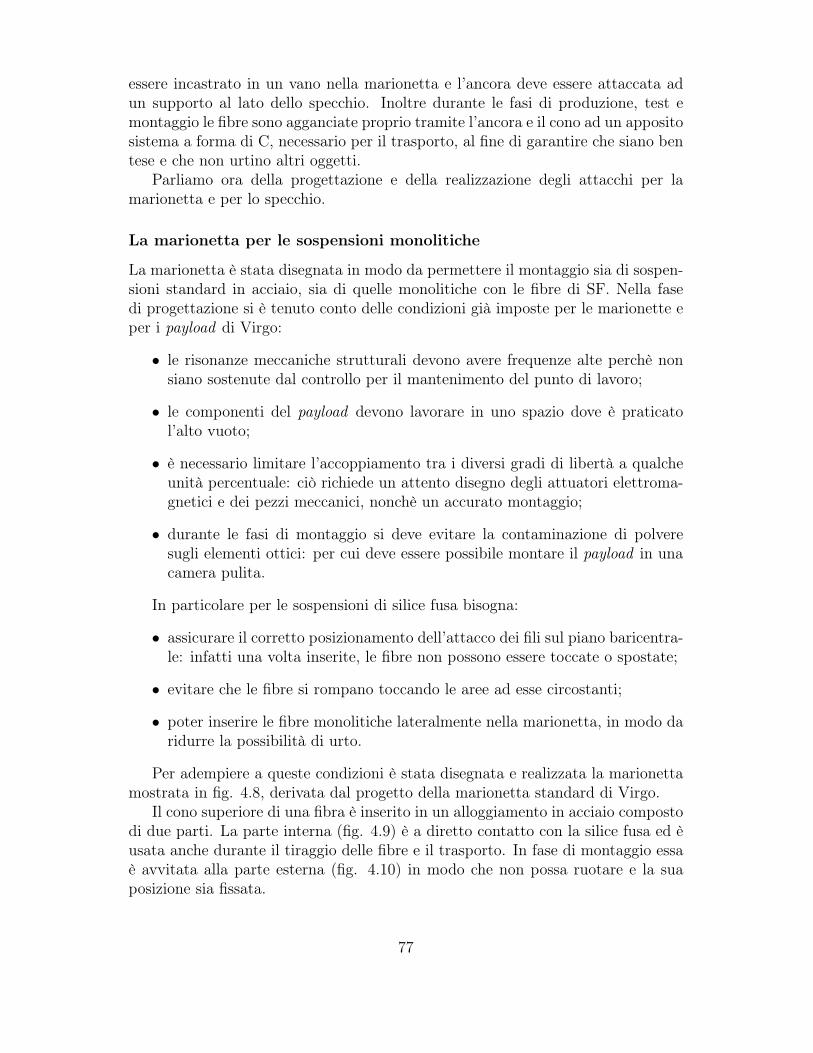
essere incastrato in un vano nella marionetta e l’ancora deve essere attaccata adun supporto al lato dello specchio. Inoltre durante le fasi di produzione, test emontaggio le fibre sono agganciate proprio tramite l’ancora e il cono ad un appositosistema a forma di C, necessario per il trasporto, al fine di garantire che siano bentese e che non urtino altri oggetti.
Parliamo ora della progettazione e della realizzazione degli attacchi per lamarionetta e per lo specchio.
La marionetta per le sospensioni monolitiche
La marionetta è stata disegnata in modo da permettere il montaggio sia di sospen-sioni standard in acciaio, sia di quelle monolitiche con le fibre di SF. Nella fasedi progettazione si è tenuto conto delle condizioni già imposte per le marionette eper i payload di Virgo:
• le risonanze meccaniche strutturali devono avere frequenze alte perchè nonsiano sostenute dal controllo per il mantenimento del punto di lavoro;
• le componenti del payload devono lavorare in uno spazio dove è praticatol’alto vuoto;
• è necessario limitare l’accoppiamento tra i diversi gradi di libertà a qualcheunità percentuale: ciò richiede un attento disegno degli attuatori elettroma-gnetici e dei pezzi meccanici, nonchè un accurato montaggio;
• durante le fasi di montaggio si deve evitare la contaminazione di polveresugli elementi ottici: per cui deve essere possibile montare il payload in unacamera pulita.
In particolare per le sospensioni di silice fusa bisogna:
• assicurare il corretto posizionamento dell’attacco dei fili sul piano baricentra-le: infatti una volta inserite, le fibre non possono essere toccate o spostate;
• evitare che le fibre si rompano toccando le aree ad esse circostanti;
• poter inserire le fibre monolitiche lateralmente nella marionetta, in modo daridurre la possibilità di urto.
Per adempiere a queste condizioni è stata disegnata e realizzata la marionettamostrata in fig. 4.8, derivata dal progetto della marionetta standard di Virgo.
Il cono superiore di una fibra è inserito in un alloggiamento in acciaio compostodi due parti. La parte interna (fig. 4.9) è a diretto contatto con la silice fusa ed èusata anche durante il tiraggio delle fibre e il trasporto. In fase di montaggio essaè avvitata alla parte esterna (fig. 4.10) in modo che non possa ruotare e la suaposizione sia fissata.
77

Figura 4.8: marionetta per il prototipo di sospensione monolitica sotto due diverseangolazioni: sono mostrati i supporti laterali dei magneti di attuazione, le fessureper l’inserimento delle fibre. Si notino inoltre (a destra, in rosso) i due cilindri dialluminio.
Figura 4.9: coni superiori saldati a delle fibre: in primo piano si vede un conoinserito nella parte interna dell’involucro di acciaio.
Figura 4.10: scatola di acciaio dove è inserito l’involucro e il cono della fibra: sinoti in questo caso la polvere biancastra dovuta ai depositi di silice fusa prodottidurante la saldatura delle fibre.
78
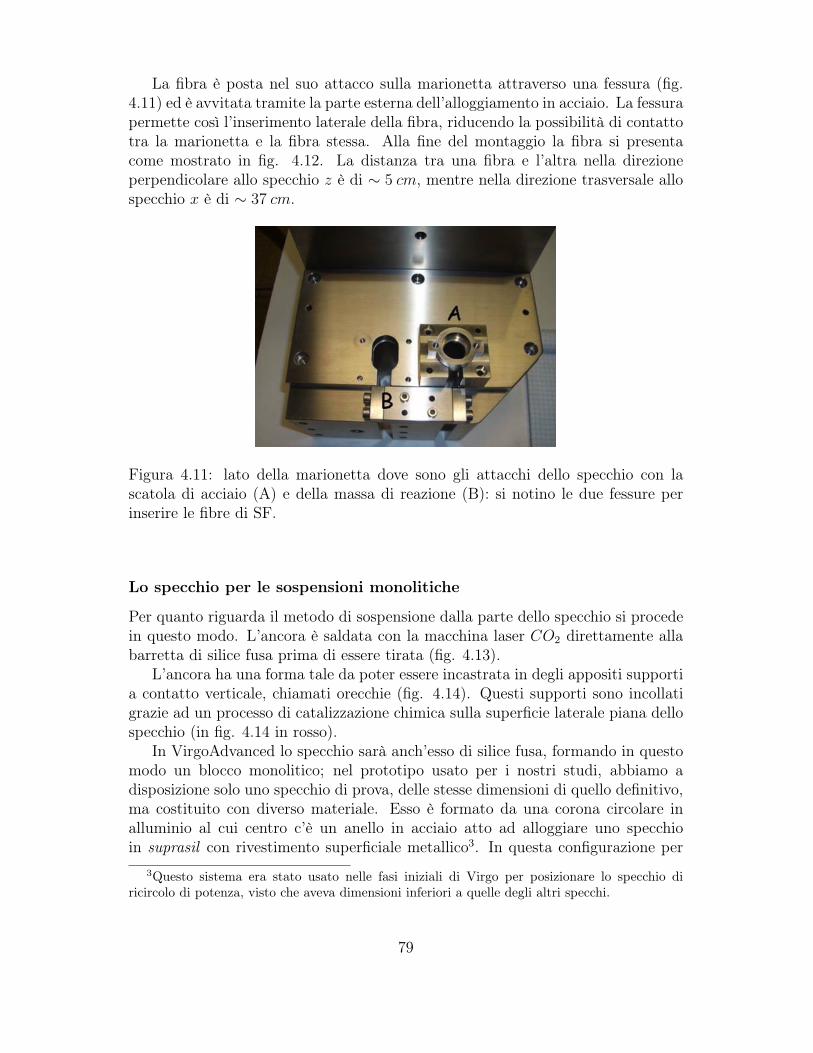
La fibra è posta nel suo attacco sulla marionetta attraverso una fessura (fig.4.11) ed è avvitata tramite la parte esterna dell’alloggiamento in acciaio. La fessurapermette così l’inserimento laterale della fibra, riducendo la possibilità di contattotra la marionetta e la fibra stessa. Alla fine del montaggio la fibra si presentacome mostrato in fig. 4.12. La distanza tra una fibra e l’altra nella direzioneperpendicolare allo specchio z è di ) 5 cm, mentre nella direzione trasversale allospecchio x è di ) 37 cm.
Figura 4.11: lato della marionetta dove sono gli attacchi dello specchio con lascatola di acciaio (A) e della massa di reazione (B): si notino le due fessure perinserire le fibre di SF.
Lo specchio per le sospensioni monolitiche
Per quanto riguarda il metodo di sospensione dalla parte dello specchio si procedein questo modo. L’ancora è saldata con la macchina laser CO2 direttamente allabarretta di silice fusa prima di essere tirata (fig. 4.13).
L’ancora ha una forma tale da poter essere incastrata in degli appositi supportia contatto verticale, chiamati orecchie (fig. 4.14). Questi supporti sono incollatigrazie ad un processo di catalizzazione chimica sulla superficie laterale piana dellospecchio (in fig. 4.14 in rosso).
In VirgoAdvanced lo specchio sarà anch’esso di silice fusa, formando in questomodo un blocco monolitico; nel prototipo usato per i nostri studi, abbiamo adisposizione solo uno specchio di prova, delle stesse dimensioni di quello definitivo,ma costituito con diverso materiale. Esso è formato da una corona circolare inalluminio al cui centro c’è un anello in acciaio atto ad alloggiare uno specchioin suprasil con rivestimento superficiale metallico3. In questa configurazione per
3Questo sistema era stato usato nelle fasi iniziali di Virgo per posizionare lo specchio diricircolo di potenza, visto che aveva dimensioni inferiori a quelle degli altri specchi.
79

Figura 4.12: fibra con cono inserita nella sua fessura della marionetta.
Figura 4.13: ancora di silice fusa a confronto con un’ancora di acciaio di prova.
80
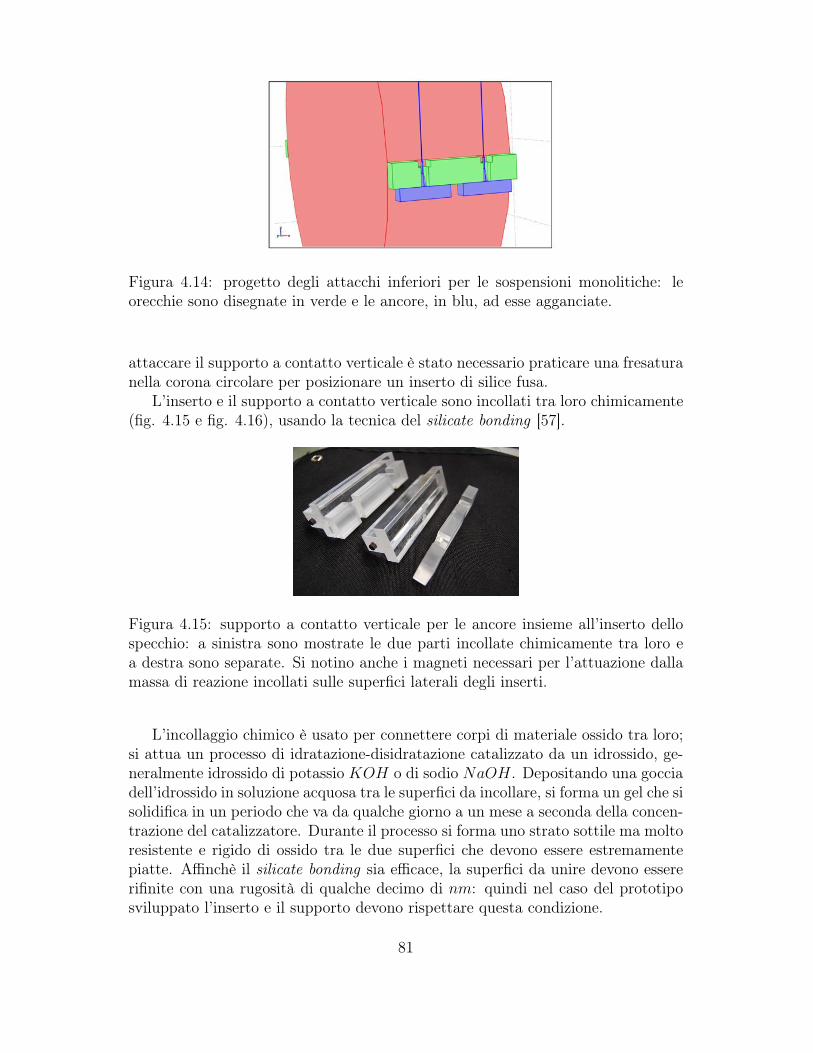
Figura 4.14: progetto degli attacchi inferiori per le sospensioni monolitiche: leorecchie sono disegnate in verde e le ancore, in blu, ad esse agganciate.
attaccare il supporto a contatto verticale è stato necessario praticare una fresaturanella corona circolare per posizionare un inserto di silice fusa.
L’inserto e il supporto a contatto verticale sono incollati tra loro chimicamente(fig. 4.15 e fig. 4.16), usando la tecnica del silicate bonding [57].
Figura 4.15: supporto a contatto verticale per le ancore insieme all’inserto dellospecchio: a sinistra sono mostrate le due parti incollate chimicamente tra loro ea destra sono separate. Si notino anche i magneti necessari per l’attuazione dallamassa di reazione incollati sulle superfici laterali degli inserti.
L’incollaggio chimico è usato per connettere corpi di materiale ossido tra loro;si attua un processo di idratazione-disidratazione catalizzato da un idrossido, ge-neralmente idrossido di potassio KOH o di sodio NaOH. Depositando una gocciadell’idrossido in soluzione acquosa tra le superfici da incollare, si forma un gel che sisolidifica in un periodo che va da qualche giorno a un mese a seconda della concen-trazione del catalizzatore. Durante il processo si forma uno strato sottile ma moltoresistente e rigido di ossido tra le due superfici che devono essere estremamentepiatte. A"nchè il silicate bonding sia e"cace, la superfici da unire devono essererifinite con una rugosità di qualche decimo di nm: quindi nel caso del prototiposviluppato l’inserto e il supporto devono rispettare questa condizione.
81
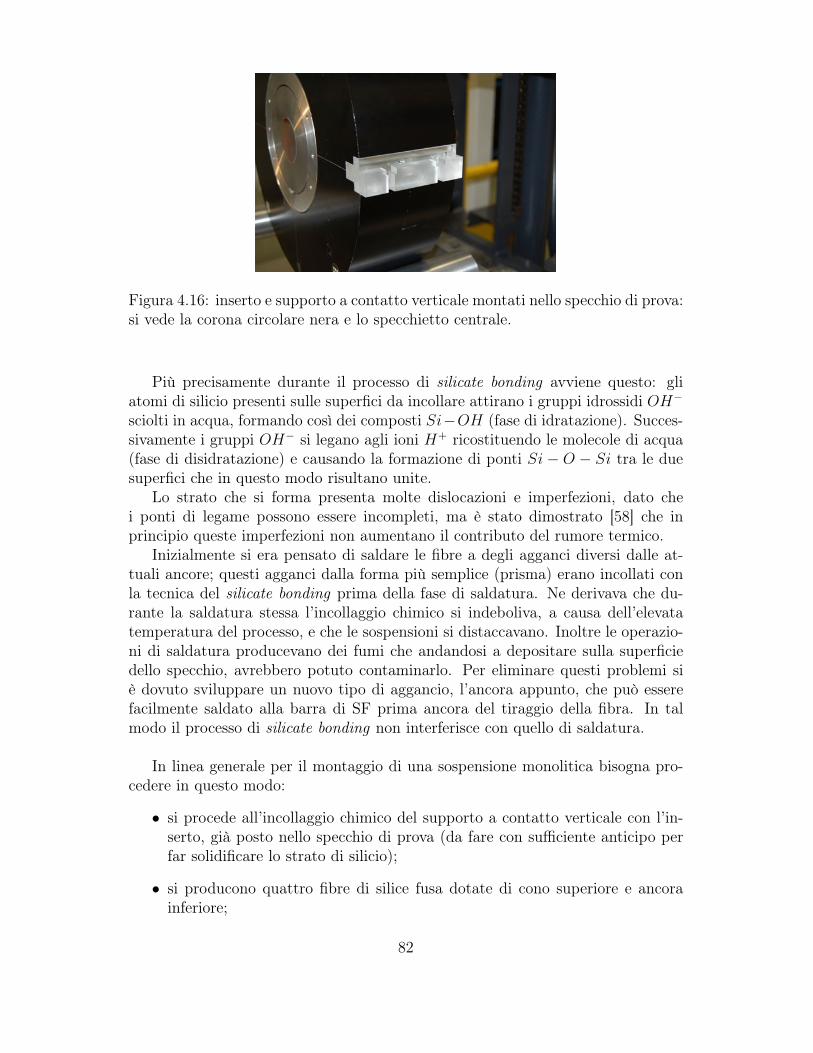
Figura 4.16: inserto e supporto a contatto verticale montati nello specchio di prova:si vede la corona circolare nera e lo specchietto centrale.
Più precisamente durante il processo di silicate bonding avviene questo: gliatomi di silicio presenti sulle superfici da incollare attirano i gruppi idrossidi OH#
sciolti in acqua, formando così dei composti Si"OH (fase di idratazione). Succes-sivamente i gruppi OH# si legano agli ioni H+ ricostituendo le molecole di acqua(fase di disidratazione) e causando la formazione di ponti Si " O " Si tra le duesuperfici che in questo modo risultano unite.
Lo strato che si forma presenta molte dislocazioni e imperfezioni, dato chei ponti di legame possono essere incompleti, ma è stato dimostrato [58] che inprincipio queste imperfezioni non aumentano il contributo del rumore termico.
Inizialmente si era pensato di saldare le fibre a degli agganci diversi dalle at-tuali ancore; questi agganci dalla forma più semplice (prisma) erano incollati conla tecnica del silicate bonding prima della fase di saldatura. Ne derivava che du-rante la saldatura stessa l’incollaggio chimico si indeboliva, a causa dell’elevatatemperatura del processo, e che le sospensioni si distaccavano. Inoltre le operazio-ni di saldatura producevano dei fumi che andandosi a depositare sulla superficiedello specchio, avrebbero potuto contaminarlo. Per eliminare questi problemi siè dovuto sviluppare un nuovo tipo di aggancio, l’ancora appunto, che può esserefacilmente saldato alla barra di SF prima ancora del tiraggio della fibra. In talmodo il processo di silicate bonding non interferisce con quello di saldatura.
In linea generale per il montaggio di una sospensione monolitica bisogna pro-cedere in questo modo:
• si procede all’incollaggio chimico del supporto a contatto verticale con l’in-serto, già posto nello specchio di prova (da fare con su"ciente anticipo perfar solidificare lo strato di silicio);
• si producono quattro fibre di silice fusa dotate di cono superiore e ancorainferiore;
82
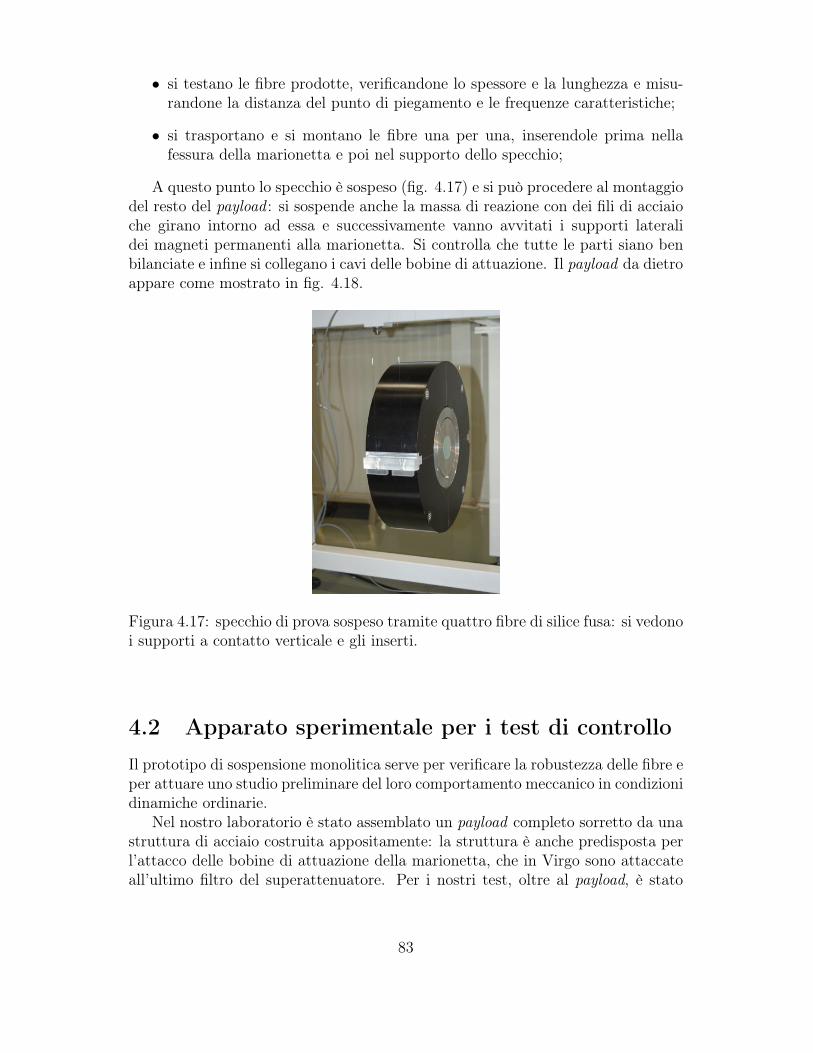
• si testano le fibre prodotte, verificandone lo spessore e la lunghezza e misu-randone la distanza del punto di piegamento e le frequenze caratteristiche;
• si trasportano e si montano le fibre una per una, inserendole prima nellafessura della marionetta e poi nel supporto dello specchio;
A questo punto lo specchio è sospeso (fig. 4.17) e si può procedere al montaggiodel resto del payload : si sospende anche la massa di reazione con dei fili di acciaioche girano intorno ad essa e successivamente vanno avvitati i supporti lateralidei magneti permanenti alla marionetta. Si controlla che tutte le parti siano benbilanciate e infine si collegano i cavi delle bobine di attuazione. Il payload da dietroappare come mostrato in fig. 4.18.
Figura 4.17: specchio di prova sospeso tramite quattro fibre di silice fusa: si vedonoi supporti a contatto verticale e gli inserti.
4.2 Apparato sperimentale per i test di controlloIl prototipo di sospensione monolitica serve per verificare la robustezza delle fibre eper attuare uno studio preliminare del loro comportamento meccanico in condizionidinamiche ordinarie.
Nel nostro laboratorio è stato assemblato un payload completo sorretto da unastruttura di acciaio costruita appositamente: la struttura è anche predisposta perl’attacco delle bobine di attuazione della marionetta, che in Virgo sono attaccateall’ultimo filtro del superattenuatore. Per i nostri test, oltre al payload, è stato
83
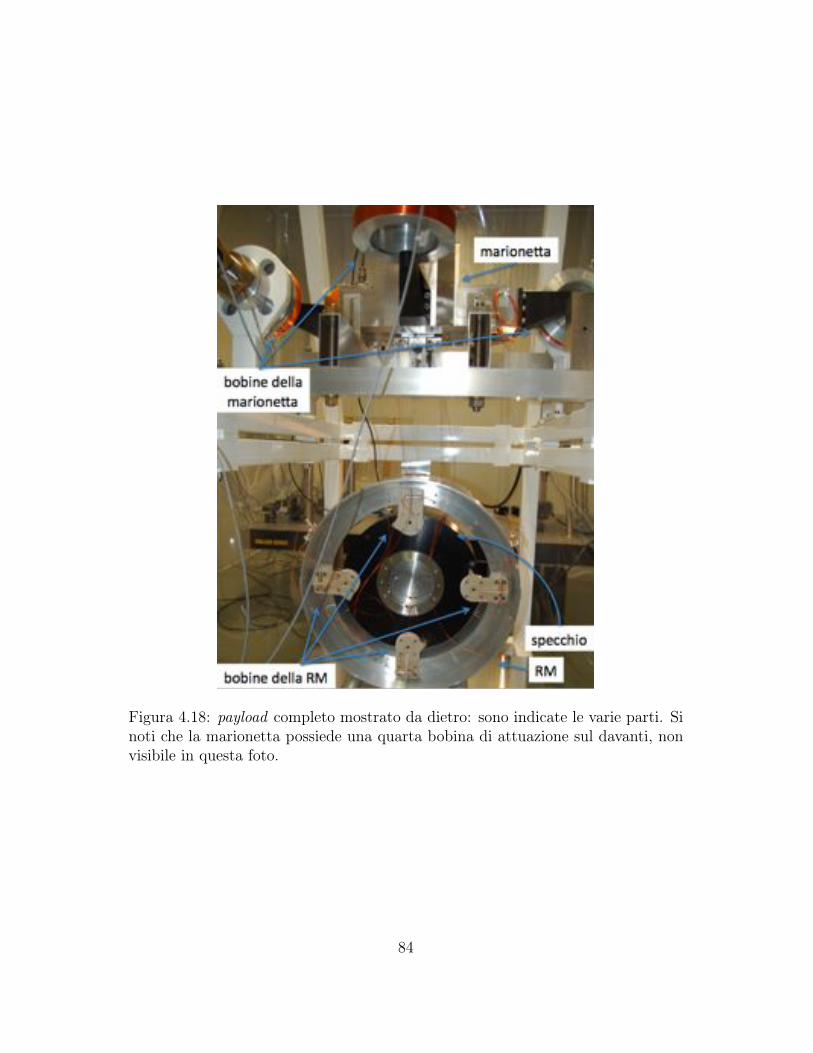
Figura 4.18: payload completo mostrato da dietro: sono indicate le varie parti. Sinoti che la marionetta possiede una quarta bobina di attuazione sul davanti, nonvisibile in questa foto.
84
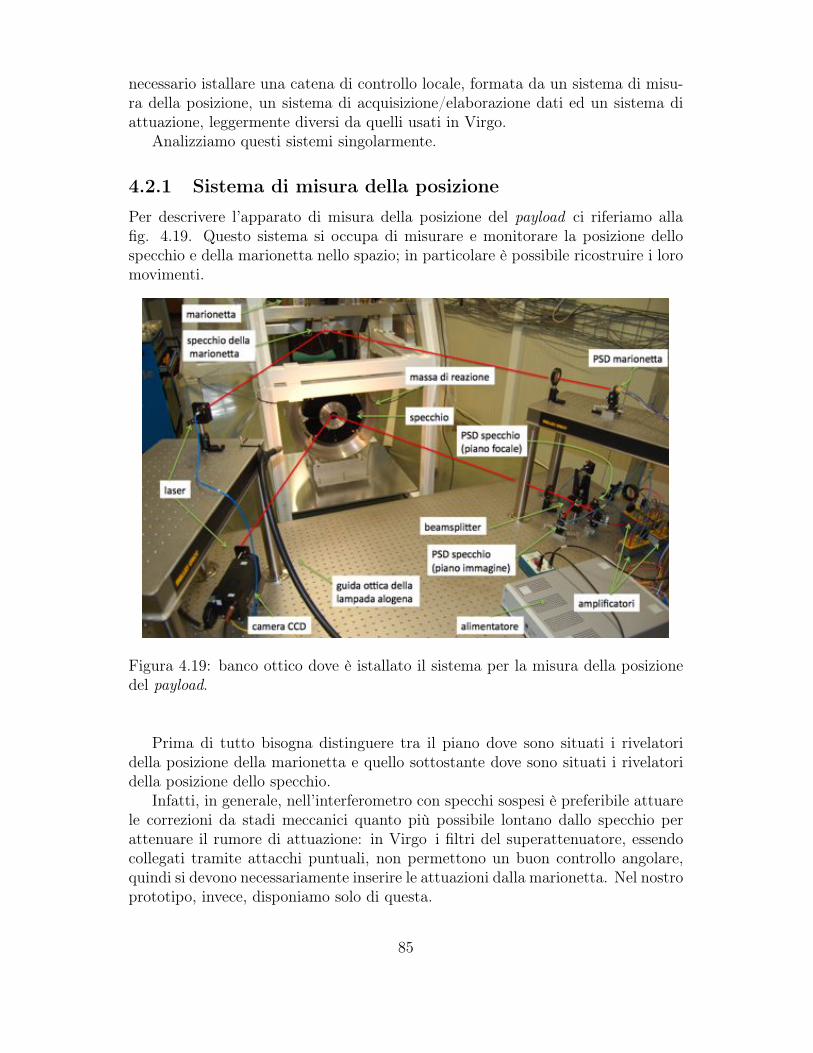
necessario istallare una catena di controllo locale, formata da un sistema di misu-ra della posizione, un sistema di acquisizione/elaborazione dati ed un sistema diattuazione, leggermente diversi da quelli usati in Virgo.
Analizziamo questi sistemi singolarmente.
4.2.1 Sistema di misura della posizionePer descrivere l’apparato di misura della posizione del payload ci riferiamo allafig. 4.19. Questo sistema si occupa di misurare e monitorare la posizione dellospecchio e della marionetta nello spazio; in particolare è possibile ricostruire i loromovimenti.
Figura 4.19: banco ottico dove è istallato il sistema per la misura della posizionedel payload.
Prima di tutto bisogna distinguere tra il piano dove sono situati i rivelatoridella posizione della marionetta e quello sottostante dove sono situati i rivelatoridella posizione dello specchio.
Infatti, in generale, nell’interferometro con specchi sospesi è preferibile attuarele correzioni da stadi meccanici quanto più possibile lontano dallo specchio perattenuare il rumore di attuazione: in Virgo i filtri del superattenuatore, essendocollegati tramite attacchi puntuali, non permettono un buon controllo angolare,quindi si devono necessariamente inserire le attuazioni dalla marionetta. Nel nostroprototipo, invece, disponiamo solo di questa.
85
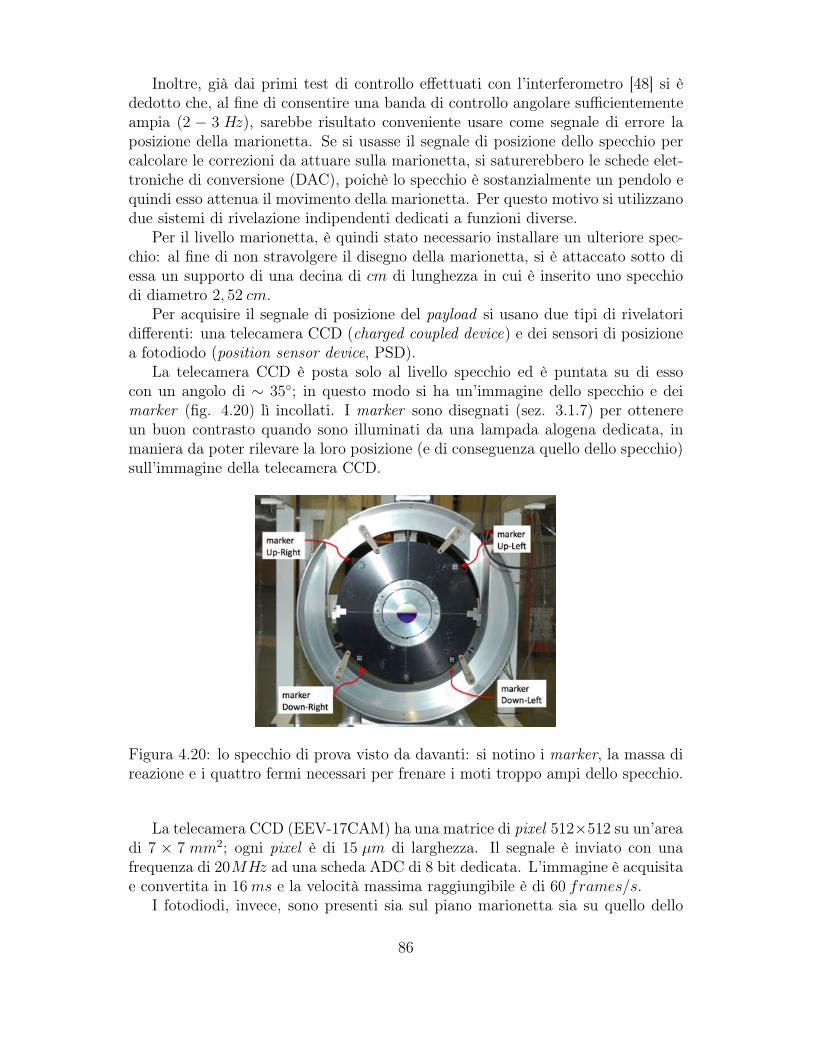
Inoltre, già dai primi test di controllo e!ettuati con l’interferometro [48] si èdedotto che, al fine di consentire una banda di controllo angolare su"cientementeampia (2 " 3 Hz), sarebbe risultato conveniente usare come segnale di errore laposizione della marionetta. Se si usasse il segnale di posizione dello specchio percalcolare le correzioni da attuare sulla marionetta, si saturerebbero le schede elet-troniche di conversione (DAC), poichè lo specchio è sostanzialmente un pendolo equindi esso attenua il movimento della marionetta. Per questo motivo si utilizzanodue sistemi di rivelazione indipendenti dedicati a funzioni diverse.
Per il livello marionetta, è quindi stato necessario installare un ulteriore spec-chio: al fine di non stravolgere il disegno della marionetta, si è attaccato sotto diessa un supporto di una decina di cm di lunghezza in cui è inserito uno specchiodi diametro 2, 52 cm.
Per acquisire il segnale di posizione del payload si usano due tipi di rivelatoridi!erenti: una telecamera CCD (charged coupled device) e dei sensori di posizionea fotodiodo (position sensor device, PSD).
La telecamera CCD è posta solo al livello specchio ed è puntata su di essocon un angolo di ) 35&; in questo modo si ha un’immagine dello specchio e deimarker (fig. 4.20) lì incollati. I marker sono disegnati (sez. 3.1.7) per ottenereun buon contrasto quando sono illuminati da una lampada alogena dedicata, inmaniera da poter rilevare la loro posizione (e di conseguenza quello dello specchio)sull’immagine della telecamera CCD.
Figura 4.20: lo specchio di prova visto da davanti: si notino i marker, la massa direazione e i quattro fermi necessari per frenare i moti troppo ampi dello specchio.
La telecamera CCD (EEV-17CAM) ha una matrice di pixel 512&512 su un’areadi 7 & 7 mm2; ogni pixel è di 15 µm di larghezza. Il segnale è inviato con unafrequenza di 20MHz ad una scheda ADC di 8 bit dedicata. L’immagine è acquisitae convertita in 16 ms e la velocità massima raggiungibile è di 60 frames/s.
I fotodiodi, invece, sono presenti sia sul piano marionetta sia su quello dello
86

specchio; per risalire alla posizione di questi due corpi si usano due diverse leveottiche giacenti sul piano orizzontale4 (in rosso in fig. 4.19). Due laser indipendentiinviano il loro fascio sui due specchi con un angolo di incidenza di circa 35&; i fascisono qui riflessi e focalizzati sui fotodiodi da due lenti.
I fotodiodi (Hamamatsu S2044 [59]) hanno un anodo e quattro elettrodi cheforniscono una corrente proporzionale alla distanza di un fascio di luce incidentedai quattro lati del sensore: in questo modo è possibile ricostruire il segnale dierrore per lo specchio e per la marionetta combinando opportunamente i valori dicorrente elettrica misurata da ogni elettrodo (eqq. 4.13 e 4.14). Ogni elettrodo deifotodiodi è collegato ad un canale di un amplificatore di!erenziale ed è inviato adun canale di una scheda ADC a 16 bit di tipo standard, usati anche in Virgo.
Ciascun fotodiodo è montato su una serie di slitte micrometriche che permet-tono la traslazione del rivelatore lungo le tre direzioni degli assi e attorno all’assez. Con tale sistema è possibile compiere una prima diagonalizzazione tra i gradidi libertà (sez. 4.2.4) e posizionare il PSD alla voluta distanza dalla lente.
Infatti, a seconda di quello che vogliamo misurare, possiamo montare il PSD adue diverse distanze dalla lente: vediamo perchè. Ogni lente ha:
1. un piano focale, dove i raggi paralleli all’asse ottico si concentrano: la lun-ghezza focale f di una lente, ovvero la distanza tra la lente e il piano focale,nel caso di una lente sottile posta in aria, è:
1
f= (n" 1)
.1
r1" 1
r2
/(4.5)
dove r1 e r2 sono i raggi di curvatura della lente e n l’indice di rifrazione delmateriale di cui è composta.
2. un piano immagine, dove i raggi provenienti da un generico oggetto si concen-trano: la distanza L" tra il piano della lente e quello dove si forma l’immaginesi ricava dall’espressione:
1
f=
1
L+
1
L"(4.6)
dove L è la distanza tra il piano dell’oggetto e quello della lente.
È possibile calcolare la matrice complessiva per la determinazione dello sposta-mento X1 e dell’angolo /1 del fascio laser sul PSD (fig. 4.21).
Bisogna comporre le matrici che definiscono i singoli tratti: per lo spostamentodi una quantità s, la matrice associata è:
A(s) =
11 s0 1
2
(4.7)
4In Virgo la configurazione è diversa: le leve ottiche si trovano su un piano inclinato a 21$,dato che le finestre ottiche da cui si osserva hanno questa collocazione.
87

!
D L
X1X
!1 !
lens
Figura 4.21: trasformazioni dell’angolo e delle dimensioni di un oggetto attraversouna lente.
mentre per la lente la matrice corrispondente è:
A(f) =
11 0" 1
f 1
2
(4.8)
Dunque, partendo dal punto dove si trova l’oggetto, in cui avviene la rifles-sione della leva ottica, abbiamo uno spostamento pari a L a cui segue la lente dilunghezza focale f ; dopo di questa c’è un ulteriore spostamento D fino al fotodio-do. La matrice complessiva è data dall’applicazione lineare di A(D) ·A(f) ·A(L),ottenendo: 1
X1
/1
2
=
11" D
f L(1" Df + D)
" 1f 1" L
f
2
·1
X/
2
(4.9)
dove X e X1 sono le distanze dall’asse ottico del fascio laser prima e dopo la lente,/ e /1 sono gli angoli rispetto all’asse ottico sotto cui si vede il fascio laser prima edopo la lente; mentre L e D sono rispettivamente le distanze dello specchio e delPSD dalla lente.
Se il fotodiodo si trova:
• sul piano focale, D $ f , dall’eq. 4.9 si ottiene che:
X1 = (L + f)/ (4.10)
ovvero la posizione del fascio laser sul PSD dipende esclusivamente dal-l’angolo sotto cui il fascio stesso giunge sulla lente: se questo angolo varia,varierà anche la posizione misurata sul PSD. Quindi sul piano focale sonorilevabili i movimenti angolari dello specchio (fig. 4.22, a destra).
• sul piano immagine, D $ LfL#f , dall’eq. 4.9 si ottiene che:
X1 = " f
L" fX (4.11)
ovvero la posizione del fascio laser sul PSD dipende solamente dalla distan-za dall’asse ottico del fascio prima di incontrare la lente. Ora, quando lospecchio trasla lungo l’asse z di una quantità pari a z (fig. 4.22, a sinistra),il fascio laser che incide sul fotodiodo si sposta di una quantità X, pari a:
X = z2 sin 2
cos(2" !)(4.12)
88

dove 2 è l’angolo di incidenza del fascio laser e ! è l’angolo tra l’asse z el’asse ottico. Quindi sul piano immagine sono rilevabili i movimenti traslatoridello specchio.
!
lens
optical axis
! "
X
2"z
2#
#
lens
optical axis
Figura 4.22: variazione della posizione del fascio laser incidente sul PSD connessaai movimenti dello specchio: a sinistra, uno spostamento dello specchio lungo l’assez, a destra, una rotazione dello specchio attorno all’asse y.
Nel nostro caso, la distanza tra la lente e lo specchio è di L = 132, 5 cm esi ha una lunghezza focale pari a f = 20 cm e una distanza tra la lente e ilpiano immagine di L" = 23, 5 cm. Dato che il riferimento fondamentale per ilpunto di lavoro dell’interferometro è la posizione dello specchio, siamo interessatia conoscere sia le traslazioni lungo l’asse z sia le sue rotazioni attorno agli altri dueassi. Dunque al livello dello specchio è necessario istallare un fotodiodo sul pianofocale della lente (PSDf) ed uno su quello immagine (PSDi): il fascio laser dellaleva ottica arriva ai due rivelatori, diviso da un beam splitter. Al livello marionettabasta conoscere le rotazioni intorno agli assi x e y, dato che la conoscenza dellaposizione della marionetta è usata solo al fine di aumentare la banda del controlloangolare di allineamento; per cui è necessario solo un fotodiodo sul piano focaledella lente (PSDm).
4.2.2 Sistema di acquisizione ed elaborazione datiIl sistema di controllo digitale ed acquisizione dati messo a punto per il test dellasospensione monolitica è derivato da quello in uso a Virgo ed è schematizzato infig. 4.23. Esistono alcune di!erenze tra questi due sistemi ed in particolare nelnostro prototipo si ha che:
• il gruppo di schede elettroniche per il controllo del superattenuatore sonoassenti;
• il sistema di acquisizione dati e quello di temporizzazione sono alloggiati nelmedesimo cestello a bus VME, dove è presente l’elettronica del controllo delpayload ;
89
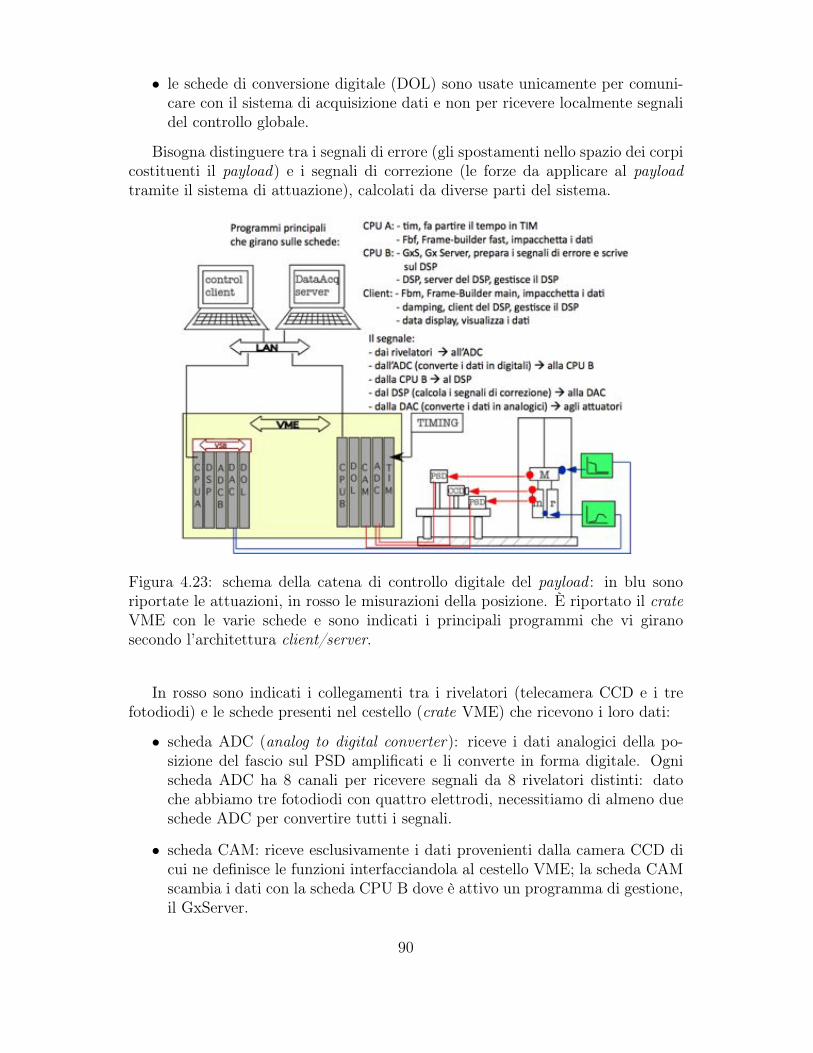
• le schede di conversione digitale (DOL) sono usate unicamente per comuni-care con il sistema di acquisizione dati e non per ricevere localmente segnalidel controllo globale.
Bisogna distinguere tra i segnali di errore (gli spostamenti nello spazio dei corpicostituenti il payload) e i segnali di correzione (le forze da applicare al payloadtramite il sistema di attuazione), calcolati da diverse parti del sistema.
Figura 4.23: schema della catena di controllo digitale del payload : in blu sonoriportate le attuazioni, in rosso le misurazioni della posizione. È riportato il crateVME con le varie schede e sono indicati i principali programmi che vi giranosecondo l’architettura client/server.
In rosso sono indicati i collegamenti tra i rivelatori (telecamera CCD e i trefotodiodi) e le schede presenti nel cestello (crate VME) che ricevono i loro dati:
• scheda ADC (analog to digital converter): riceve i dati analogici della po-sizione del fascio sul PSD amplificati e li converte in forma digitale. Ognischeda ADC ha 8 canali per ricevere segnali da 8 rivelatori distinti: datoche abbiamo tre fotodiodi con quattro elettrodi, necessitiamo di almeno dueschede ADC per convertire tutti i segnali.
• scheda CAM: riceve esclusivamente i dati provenienti dalla camera CCD dicui ne definisce le funzioni interfacciandola al cestello VME; la scheda CAMscambia i dati con la scheda CPU B dove è attivo un programma di gestione,il GxServer.
90
Una volta che i dati sono digitalizzati sono inviati alla scheda CPU B che sioccupa della gestione del DSP (digital signal processing). Il DSP calcola i segnalidi correzione a partire dai dati che gli vengono passati dalla CPU B applicandoad essi degli appositi filtri assegnati tramite il programma client del DSP. Nellascheda CPU B girano due programmi:
Gx Server: questo programma legge i dati nelle schede ADC e nella scheda CAM,prepara i segnali di errore e li invia alla scheda DSP; inoltre si occupa di farpartire la scheda TIM della temporizzazione.
DSP Server: questo programma si occupa della gestione del DSP. È possibilecambiare i filtri e i valori di o!set del DSP con il programma client chiamatodamping che gira su un computer esterno, pc100.
Dopo che il DSP ha calcolato i segnali di correzione, questi sono inviati:
• alla scheda DAC (digital to analog converter) per la riconversione analogicaa 12 bit; i canali di uscita della scheda DAC sono inviati ai generatori degliattuatori, coil driver.
• al DAQ (Data Acquisition), che acquisisce e registra i segnali. Per il trasferi-mento dei dati sono utilizzate due schede DOL, digital optical link, collegatetra loro tramite una fibra ottica. Questo sistema permette, in Virgo, di tra-sferire i dati alla velocità della luce e di coprire la distanza di 3 km presentetra il DSP e il DAQ in tempo reale. Nel nostro laboratorio non abbiamoquesta elevata distanza, ma per mantenere il sistema il più possibile simile aquello di Virgo si sono inserite le due schede DOL nello stesso cestello VME.
Si noti che il sistema DAQ ha varie funzionalità distribuite su diversi processi.Il processo fondamentale è il Fbm, Frame-builder main che si occupa di gestire:
• Fbf, Frame-builder fast, campiona i dati inviati dal DSP ad alta frequenza(10 kHz) e gira sulla CPU A;
• Fbs, Frame-builder slow, campiona i dati inviati dal Gx Server, tramite uncavo Ethernet, a frequenza più bassa e gira invece su un macchina Linuxcollegata alla rete locale, il pc100.
Su questa macchina sono presenti altri due processi, Fbm Dy, Frame-buildermain display per la visualizzazione dei dati e Fbm Csm1, Frame-builder mainconsumer 1 che raggruppa una serie di canali di acquisizione riguardanti lo stessosottosistema. Infatti in Virgo si monitorano circa 1200 canali diversi corrispondentiad altrettante grandezze misurate; dato che non si possono analizzare tutti i canalicontemporaneamente, essi sono suddivisi in diversi sottogruppi (consumer lines),come ad esempio la serie di dati che riguardano le sospensioni o il controllo locale.Nel nostro caso abbiamo solo un consumer.
91
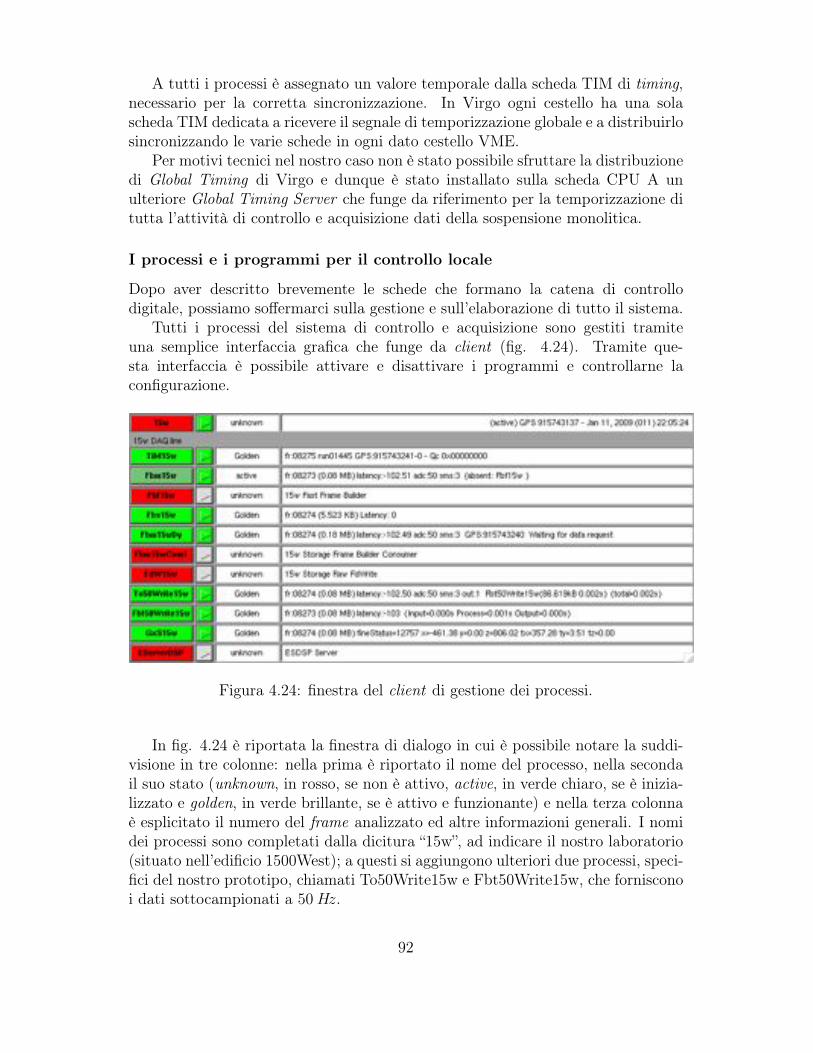
A tutti i processi è assegnato un valore temporale dalla scheda TIM di timing,necessario per la corretta sincronizzazione. In Virgo ogni cestello ha una solascheda TIM dedicata a ricevere il segnale di temporizzazione globale e a distribuirlosincronizzando le varie schede in ogni dato cestello VME.
Per motivi tecnici nel nostro caso non è stato possibile sfruttare la distribuzionedi Global Timing di Virgo e dunque è stato installato sulla scheda CPU A unulteriore Global Timing Server che funge da riferimento per la temporizzazione ditutta l’attività di controllo e acquisizione dati della sospensione monolitica.
I processi e i programmi per il controllo locale
Dopo aver descritto brevemente le schede che formano la catena di controllodigitale, possiamo so!ermarci sulla gestione e sull’elaborazione di tutto il sistema.
Tutti i processi del sistema di controllo e acquisizione sono gestiti tramiteuna semplice interfaccia grafica che funge da client (fig. 4.24). Tramite que-sta interfaccia è possibile attivare e disattivare i programmi e controllarne laconfigurazione.
Figura 4.24: finestra del client di gestione dei processi.
In fig. 4.24 è riportata la finestra di dialogo in cui è possibile notare la suddi-visione in tre colonne: nella prima è riportato il nome del processo, nella secondail suo stato (unknown, in rosso, se non è attivo, active, in verde chiaro, se è inizia-lizzato e golden, in verde brillante, se è attivo e funzionante) e nella terza colonnaè esplicitato il numero del frame analizzato ed altre informazioni generali. I nomidei processi sono completati dalla dicitura “15w”, ad indicare il nostro laboratorio(situato nell’edificio 1500West); a questi si aggiungono ulteriori due processi, speci-fici del nostro prototipo, chiamati To50Write15w e Fbt50Write15w, che fornisconoi dati sottocampionati a 50 Hz.
92
Tra i processi gestiti dal client c’è il Gx Server; tramite il file di configurazione(Appendice C), si stabiliscono i parametri da usare per il calcolo dei segnali dierrore [60].
Il Gx Server costruisce diversi tipi di segnali:
• il segnale COARSE, proveniente dalle posizioni dei marker sull’immagineregistrata dalla telecamera; ci sono quattro segnali di questo tipo, uno perogni marker (chiamati UL, UR, DL e DR, fig. 4.20), e riguardano tutti lospecchio, dato che non si hanno i marker anche sulla marionetta. Il GxServer può elaborare in vari modi i segnali dei marker. I principali sono:
1. quello telemetrico che non richiede calibrazione essendo basato sullaconoscenza delle distanze relative dei marker ;
2. quello lineare che ricostruisce gli spostamenti in base ad una matrice(tab. 4.1).
Nel nostro caso si è scelta la seconda modalità poichè impegna la CPU B inmodo meno gravoso e poichè la calibrazione risulta elementare, non essendoil sistema posto in una camera da vuoto.
• il segnale FINE, proveniente dalle posizioni del fascio laser sui quadranti deiPSD; ci sono tre segnali di questo tipo, uno per ogni fotodiodo presente;quindi si hanno due FINE per lo specchio (piano immagine e piano focale) eun FINE per la marionetta (solo piano focale).
Il Gx Server procede in questo modo: prima di tutto si individuano le posizionidei marker sull’immagine dello specchio. Si ricordi che ogni marker è costituitoda nove puntini, ben visibili quando sono illuminati da una lampada alogena:tramite questi puntini è possibile individuare la posizione dei marker sull’immaginedata dalla telecamera. Allora si indicano approssimativamente i valori dei pixeldell’immagine che formano ogni singolo marker, stabilendo un pixel di partenzae un’area intorno ad esso dove andare a misurare la potenza incidente che deveavere un certo valore limite per essere rilevabile.
Una volta individuato il pixel dove è racchiuso un marker possiamo calcolareil segnale COARSE tramite una matrice: sulle righe sono posti i fattori con cuimoltiplicare la coordinata x e y della posizione del pixel rappresentante il markernell’immagine, sulle colonne sono posti i fattori con cui moltiplicare i sei gradi dilibertà, le tre coordinate spaziali e le tre rotazioni intorno agli assi (tab. 4.1). Sinoti che i gradi di libertà sono calcolati tramite la definizione delle quantità x, y,z, tx, ty, e tz associate: /x # tx, /y # ty, z # z e così via.
Per il segnale FINE, invece, si procede così: il fascio laser della leva ottica èrivelato dal PSD se si trova in una regione centrale del suo sensore (per eliminaregli e!etti di bordo, dove si possono creare fasci multipli) e se ha una potenzasuperiore ad un limite di guardia, entrambi i valori assegnati configurando il GxServer.
93

COARSE MS_UL 1 0 0 0 419,36 0 / dir x0 0 1 1 712,90 0 / dir y0 0 0 0 0 0x y z tx ty tz
Tabella 4.1: esempio di matrice di calcolo del segnale COARSE per il markerUp-Left: sono indicate le quantità a cui si riferiscono i valori
FINE MS_PSDf 0 0 10000 / Ax
0 -10000 0 / Ay
0 0 0z tx ty
Tabella 4.2: esempio di matrice di calcolo del segnale FINE per il PSD del pianofocale dello specchio: sono indicate le quantità a cui si riferiscono i valori
La potenza incidente è convertita in quattro fotocorrenti, una per ogni elettro-do del sensore, amplificata indipendentemente e inviata all’ingresso di altrettanticanali della scheda ADC.
Grazie alle quattro fotocorrenti è possibile definire l’asimmetria x, Ax e quellay, Ay, dove x e y sono le coordinate orizzontale e verticale del PSD:
Ax =(PUR + PDR)" (PUL + PDL)
PDR + PDL + PUR + PUL(4.13)
Ay =(PDR + PDL)" (PUR + PUL)
PDR + PDL + PUR + PUL(4.14)
dove PUR è la potenza rilevata dall’elettrodo Up-Right di un fotodiodo, PUL
quella dell’elettrodo Up-Left, PDR quella dell’elettrodo Down-Right e PDL quelladell’elettrodo Down-Left, chiamati nello stesso ordine dei marker dello specchio.
Queste due asimmetrie sono usate per ricavare z, tx e ty, associati agli spo-stamenti nei gradi di libertà z, /x e /y, tramite una matrice definita anch’essa nelGx Server (tab. 4.2): allo stesso tempo si definisce anche il fotodiodo per cui sicalcolano, PSDf, PSDi, se del livello specchio, piano focale e piano immagine, ePSDm del livello marionetta.
Gx Server è programmato in modo da trattare gerarchicamente e automatica-mente i segnali di errore:
1. il primo segnale a cui si fa riferimento è il quello COARSE: spesso inizial-mente lo specchio oscilla molto intorno alla sua posizione di equilibrio per cuila leva ottica di questo livello esce dal quadrante dei fotodiodi PSDf e PSDi.In casi come questo, si ha bisogno di monitorare gli spostamenti tramite imarker, al contrario sempre ben visibili dall’immagine della telecamera, che
94
ha un campo di vista più ampio. Allora si usano i segnali di errore calcolatidal Gx Server a partire dal COARSE per valutare i segnali di correzione daapplicare.
2. una volta che i movimenti dello specchio sono stati smorzati preliminarmentegrazie al segnale COARSE, il fascio laser rientra nei PSD di questo livello; setutti i segnali FINE sono presenti e stabili per un intervallo di tempo sancitotramite il Gx Server è possibile usare i segnali FINE, molto meno rumorosidei precedenti, per calcolare le correzioni da attuare.
3. successivamente si passa ai segnali FINE del livello marionetta per i motiviindicati in sez. 4.2.1.
I segnali di errore calcolati dal Gx Server sono passati al DSP: a questi segnalisono applicati degli opportuni filtri per computare i segnali di correzione da ap-plicare tramite il sistema di attuazione. Questo processo prende nome di anello dicontrollo del sistema (servo loop) e può essere definito per tutti i gradi di libertàdel payload, anche se è su"ciente farlo solo per /x , /y e z.
Utilizzando un’interfaccia di tipo client del DSP, cioè damping che gira sullamacchina Linux ausiliara (pc100), è possibile programmare ad alto livello le diverseapplicazioni digitali sui dati.
La schermata principale di damping è mostrata in fig. 4.25: è possibile sceglieretra diverse azioni, a seconda di quello che occorre fare. Ad esempio Hardwarepermette di implementare le variabili, decidendo su quali di esse agiscono i filtrie con quale guadagno; inoltre definisce le variabili in ingresso e quelle in uscita,che possono essere associate ai canali delle schede ADC, DAC o CAM e inviate alsistema di acquisizione, tramite cui è possibile visualizzarle grazie ad un appositoprogramma; l’insieme complessivo dei comandi prende nome di carta.
Una volta stabilito il listato delle operazioni e delle relazioni tra le variabili di in-gresso e quelle di uscita (rappresentati dalle prime due colonne in fig. 4.26), occorrecompilarlo nel linguaggio macchina del processore del DSP (comando COMPILE)ed infine va caricato e messo in funzione proprio sul DSP (comando DOWNLOAD).
Entrati nella sezione Hardware, si trova una finestra (fig. 4.26) dove ogni rigadi codice esplicita un’operazione che può essere di diverso tipo. Ad esempio si puòassegnare una variabile ad un’altra, moltiplicata per un fattore detto guadagno,come le grandezze che arrivano dal Gx Server (DPM_06 in fig. 4.26); oppure sipuò calcolare una quantità a partire da altre variabili, come nel caso di MIX checompie il prodotto tra due grandezze, di ADD che aggiunge ad una variabile unvalore definito, o ancora come nel caso di un filtro che può essere applicato ad unagrandezza con un certo guadagno.
Nella parte centrale della schermata ci sono otto colonne che indicano le ope-razioni da e!ettuare, con le grandezze involte e i guadagni:
INPUT: definisce la variabile in ingresso nell’operazione di assegnazione oppureil tipo di operazione da compiere;
95
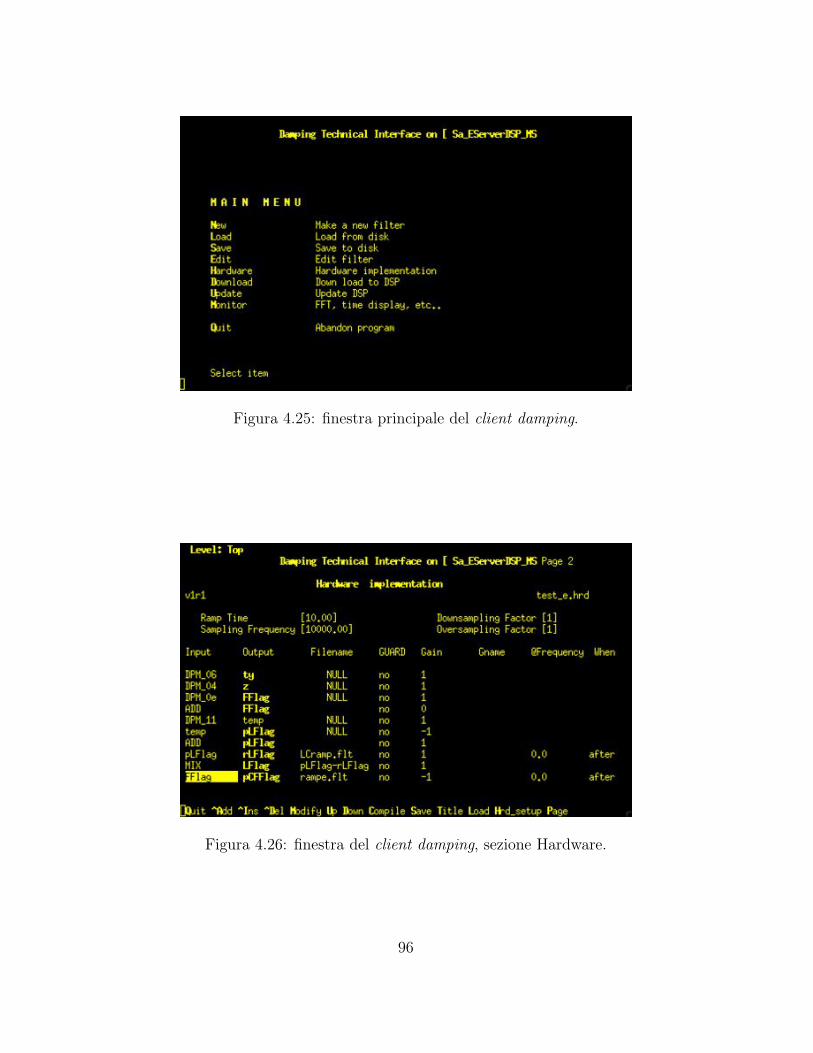
Figura 4.25: finestra principale del client damping.
Figura 4.26: finestra del client damping, sezione Hardware.
96
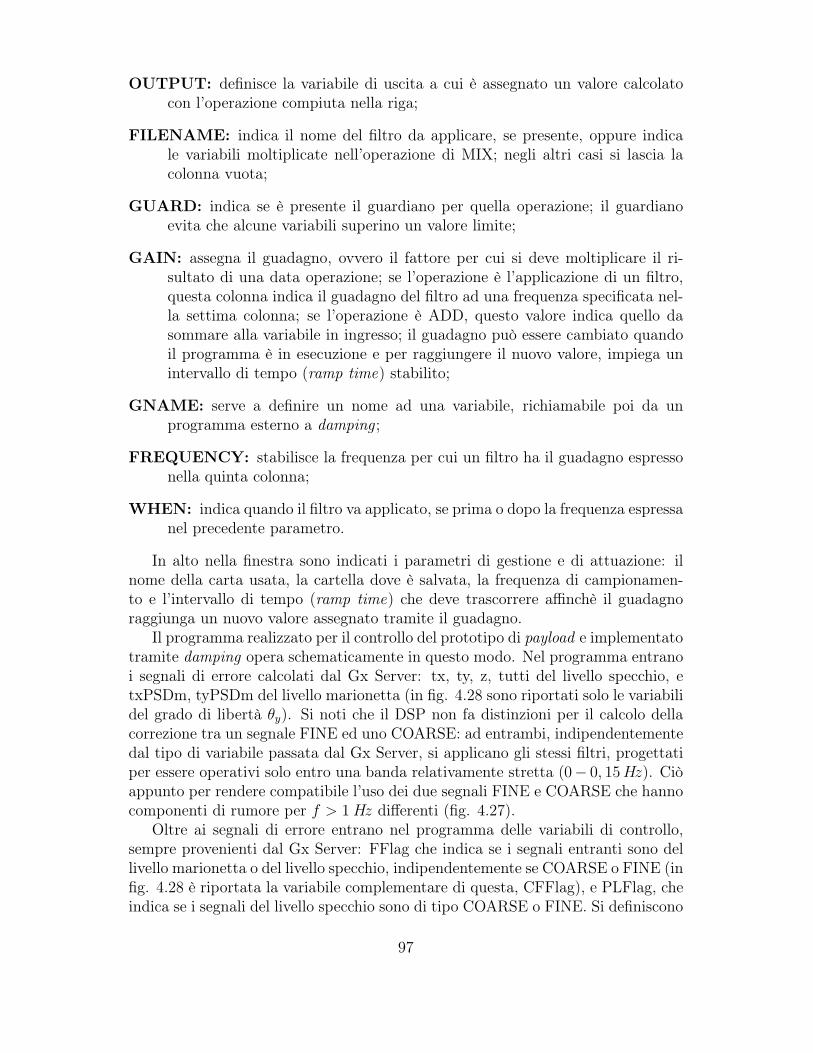
OUTPUT: definisce la variabile di uscita a cui è assegnato un valore calcolatocon l’operazione compiuta nella riga;
FILENAME: indica il nome del filtro da applicare, se presente, oppure indicale variabili moltiplicate nell’operazione di MIX; negli altri casi si lascia lacolonna vuota;
GUARD: indica se è presente il guardiano per quella operazione; il guardianoevita che alcune variabili superino un valore limite;
GAIN: assegna il guadagno, ovvero il fattore per cui si deve moltiplicare il ri-sultato di una data operazione; se l’operazione è l’applicazione di un filtro,questa colonna indica il guadagno del filtro ad una frequenza specificata nel-la settima colonna; se l’operazione è ADD, questo valore indica quello dasommare alla variabile in ingresso; il guadagno può essere cambiato quandoil programma è in esecuzione e per raggiungere il nuovo valore, impiega unintervallo di tempo (ramp time) stabilito;
GNAME: serve a definire un nome ad una variabile, richiamabile poi da unprogramma esterno a damping ;
FREQUENCY: stabilisce la frequenza per cui un filtro ha il guadagno espressonella quinta colonna;
WHEN: indica quando il filtro va applicato, se prima o dopo la frequenza espressanel precedente parametro.
In alto nella finestra sono indicati i parametri di gestione e di attuazione: ilnome della carta usata, la cartella dove è salvata, la frequenza di campionamen-to e l’intervallo di tempo (ramp time) che deve trascorrere a"nchè il guadagnoraggiunga un nuovo valore assegnato tramite il guadagno.
Il programma realizzato per il controllo del prototipo di payload e implementatotramite damping opera schematicamente in questo modo. Nel programma entranoi segnali di errore calcolati dal Gx Server: tx, ty, z, tutti del livello specchio, etxPSDm, tyPSDm del livello marionetta (in fig. 4.28 sono riportati solo le variabilidel grado di libertà /y). Si noti che il DSP non fa distinzioni per il calcolo dellacorrezione tra un segnale FINE ed uno COARSE: ad entrambi, indipendentementedal tipo di variabile passata dal Gx Server, si applicano gli stessi filtri, progettatiper essere operativi solo entro una banda relativamente stretta (0" 0, 15 Hz). Ciòappunto per rendere compatibile l’uso dei due segnali FINE e COARSE che hannocomponenti di rumore per f > 1 Hz di!erenti (fig. 4.27).
Oltre ai segnali di errore entrano nel programma delle variabili di controllo,sempre provenienti dal Gx Server: FFlag che indica se i segnali entranti sono dellivello marionetta o del livello specchio, indipendentemente se COARSE o FINE (infig. 4.28 è riportata la variabile complementare di questa, CFFlag), e PLFlag, cheindica se i segnali del livello specchio sono di tipo COARSE o FINE. Si definiscono
97
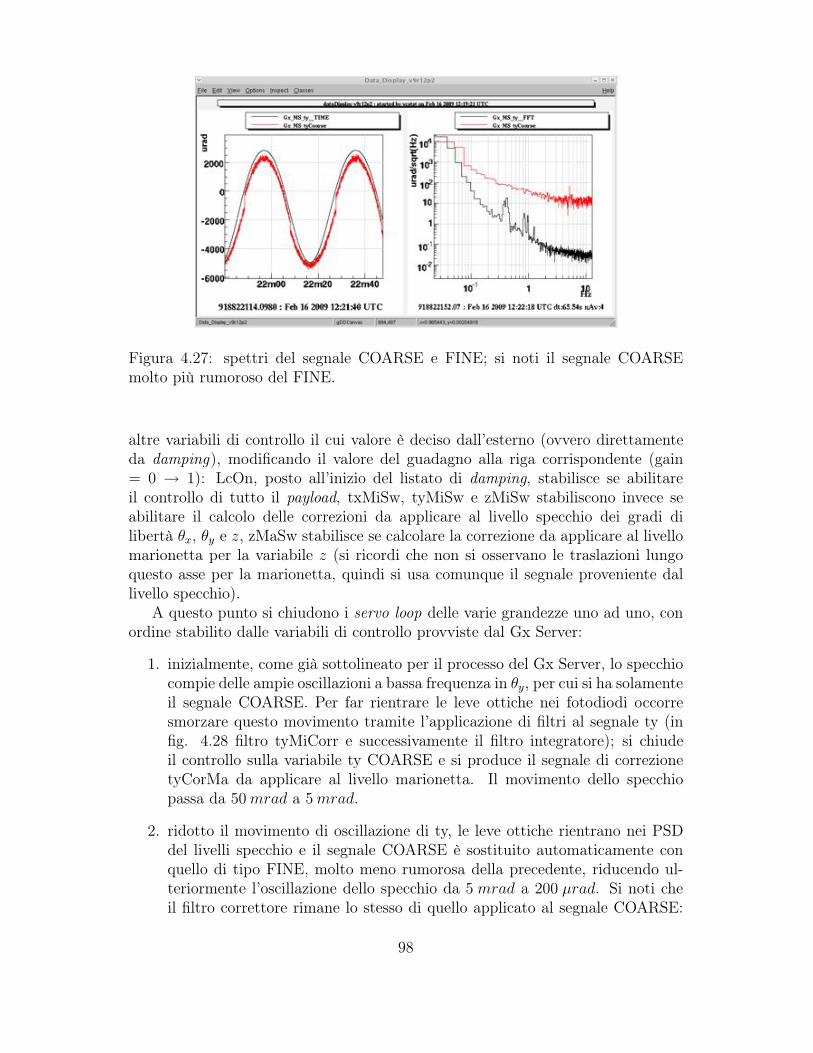
Figura 4.27: spettri del segnale COARSE e FINE; si noti il segnale COARSEmolto più rumoroso del FINE.
altre variabili di controllo il cui valore è deciso dall’esterno (ovvero direttamenteda damping), modificando il valore del guadagno alla riga corrispondente (gain= 0 # 1): LcOn, posto all’inizio del listato di damping, stabilisce se abilitareil controllo di tutto il payload, txMiSw, tyMiSw e zMiSw stabiliscono invece seabilitare il calcolo delle correzioni da applicare al livello specchio dei gradi dilibertà /x, /y e z, zMaSw stabilisce se calcolare la correzione da applicare al livellomarionetta per la variabile z (si ricordi che non si osservano le traslazioni lungoquesto asse per la marionetta, quindi si usa comunque il segnale proveniente dallivello specchio).
A questo punto si chiudono i servo loop delle varie grandezze uno ad uno, conordine stabilito dalle variabili di controllo provviste dal Gx Server:
1. inizialmente, come già sottolineato per il processo del Gx Server, lo specchiocompie delle ampie oscillazioni a bassa frequenza in /y, per cui si ha solamenteil segnale COARSE. Per far rientrare le leve ottiche nei fotodiodi occorresmorzare questo movimento tramite l’applicazione di filtri al segnale ty (infig. 4.28 filtro tyMiCorr e successivamente il filtro integratore); si chiudeil controllo sulla variabile ty COARSE e si produce il segnale di correzionetyCorMa da applicare al livello marionetta. Il movimento dello specchiopassa da 50 mrad a 5 mrad.
2. ridotto il movimento di oscillazione di ty, le leve ottiche rientrano nei PSDdel livelli specchio e il segnale COARSE è sostituito automaticamente conquello di tipo FINE, molto meno rumorosa della precedente, riducendo ul-teriormente l’oscillazione dello specchio da 5 mrad a 200 µrad. Si noti cheil filtro correttore rimane lo stesso di quello applicato al segnale COARSE:
98
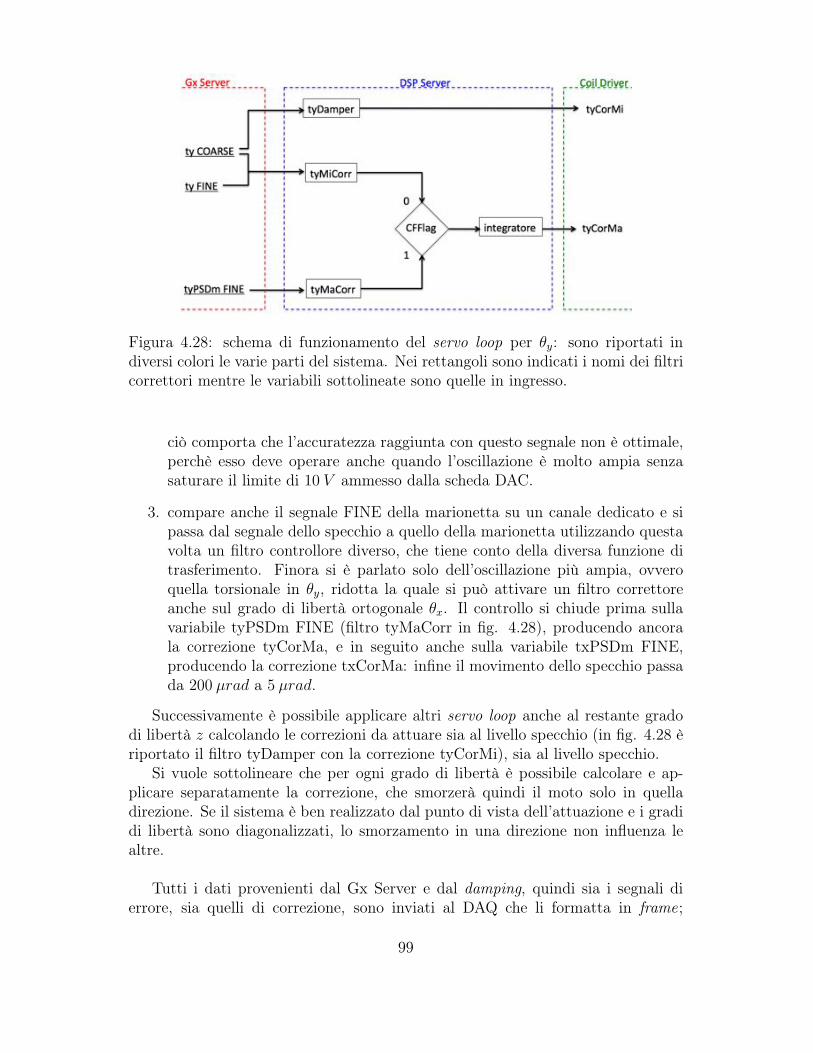
Figura 4.28: schema di funzionamento del servo loop per /y: sono riportati indiversi colori le varie parti del sistema. Nei rettangoli sono indicati i nomi dei filtricorrettori mentre le variabili sottolineate sono quelle in ingresso.
ciò comporta che l’accuratezza raggiunta con questo segnale non è ottimale,perchè esso deve operare anche quando l’oscillazione è molto ampia senzasaturare il limite di 10 V ammesso dalla scheda DAC.
3. compare anche il segnale FINE della marionetta su un canale dedicato e sipassa dal segnale dello specchio a quello della marionetta utilizzando questavolta un filtro controllore diverso, che tiene conto della diversa funzione ditrasferimento. Finora si è parlato solo dell’oscillazione più ampia, ovveroquella torsionale in /y, ridotta la quale si può attivare un filtro correttoreanche sul grado di libertà ortogonale /x. Il controllo si chiude prima sullavariabile tyPSDm FINE (filtro tyMaCorr in fig. 4.28), producendo ancorala correzione tyCorMa, e in seguito anche sulla variabile txPSDm FINE,producendo la correzione txCorMa: infine il movimento dello specchio passada 200 µrad a 5 µrad.
Successivamente è possibile applicare altri servo loop anche al restante gradodi libertà z calcolando le correzioni da attuare sia al livello specchio (in fig. 4.28 èriportato il filtro tyDamper con la correzione tyCorMi), sia al livello specchio.
Si vuole sottolineare che per ogni grado di libertà è possibile calcolare e ap-plicare separatamente la correzione, che smorzerà quindi il moto solo in quelladirezione. Se il sistema è ben realizzato dal punto di vista dell’attuazione e i gradidi libertà sono diagonalizzati, lo smorzamento in una direzione non influenza lealtre.
Tutti i dati provenienti dal Gx Server e dal damping, quindi sia i segnali dierrore, sia quelli di correzione, sono inviati al DAQ che li formatta in frame;
99
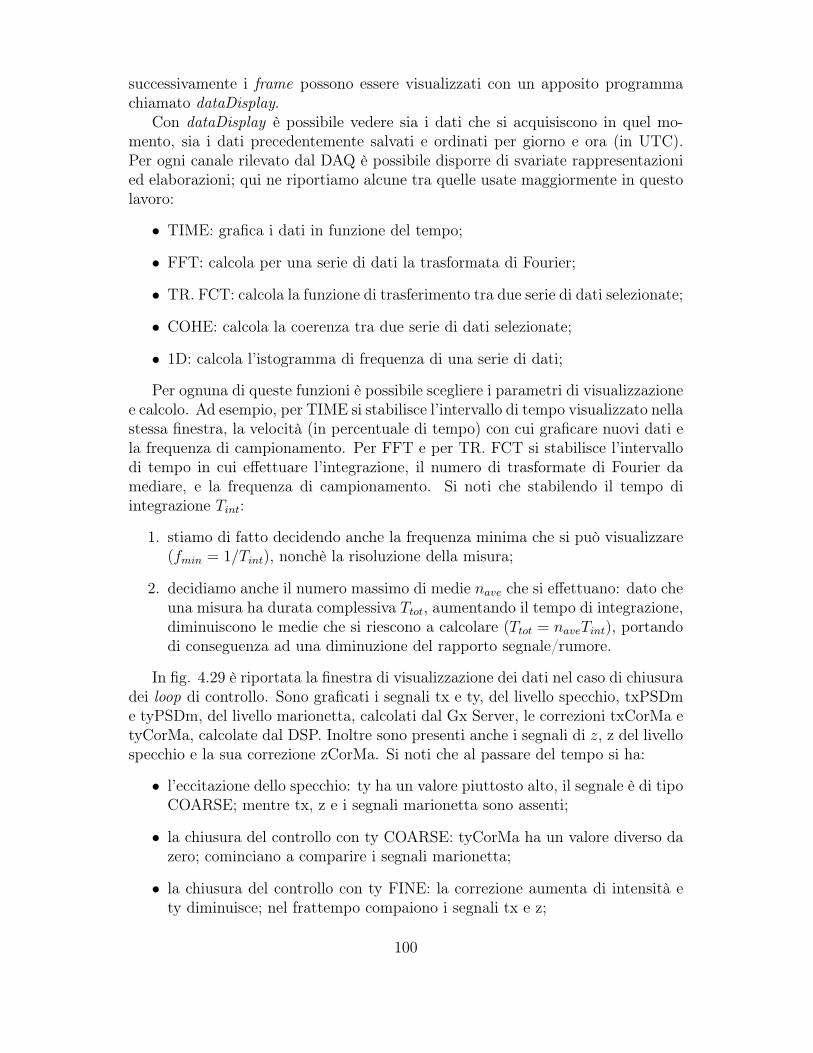
successivamente i frame possono essere visualizzati con un apposito programmachiamato dataDisplay.
Con dataDisplay è possibile vedere sia i dati che si acquisiscono in quel mo-mento, sia i dati precedentemente salvati e ordinati per giorno e ora (in UTC).Per ogni canale rilevato dal DAQ è possibile disporre di svariate rappresentazionied elaborazioni; qui ne riportiamo alcune tra quelle usate maggiormente in questolavoro:
• TIME: grafica i dati in funzione del tempo;
• FFT: calcola per una serie di dati la trasformata di Fourier;
• TR. FCT: calcola la funzione di trasferimento tra due serie di dati selezionate;
• COHE: calcola la coerenza tra due serie di dati selezionate;
• 1D: calcola l’istogramma di frequenza di una serie di dati;
Per ognuna di queste funzioni è possibile scegliere i parametri di visualizzazionee calcolo. Ad esempio, per TIME si stabilisce l’intervallo di tempo visualizzato nellastessa finestra, la velocità (in percentuale di tempo) con cui graficare nuovi dati ela frequenza di campionamento. Per FFT e per TR. FCT si stabilisce l’intervallodi tempo in cui e!ettuare l’integrazione, il numero di trasformate di Fourier damediare, e la frequenza di campionamento. Si noti che stabilendo il tempo diintegrazione Tint:
1. stiamo di fatto decidendo anche la frequenza minima che si può visualizzare(fmin = 1/Tint), nonchè la risoluzione della misura;
2. decidiamo anche il numero massimo di medie nave che si e!ettuano: dato cheuna misura ha durata complessiva Ttot, aumentando il tempo di integrazione,diminuiscono le medie che si riescono a calcolare (Ttot = naveTint), portandodi conseguenza ad una diminuzione del rapporto segnale/rumore.
In fig. 4.29 è riportata la finestra di visualizzazione dei dati nel caso di chiusuradei loop di controllo. Sono graficati i segnali tx e ty, del livello specchio, txPSDme tyPSDm, del livello marionetta, calcolati dal Gx Server, le correzioni txCorMa etyCorMa, calcolate dal DSP. Inoltre sono presenti anche i segnali di z, z del livellospecchio e la sua correzione zCorMa. Si noti che al passare del tempo si ha:
• l’eccitazione dello specchio: ty ha un valore piuttosto alto, il segnale è di tipoCOARSE; mentre tx, z e i segnali marionetta sono assenti;
• la chiusura del controllo con ty COARSE: tyCorMa ha un valore diverso dazero; cominciano a comparire i segnali marionetta;
• la chiusura del controllo con ty FINE: la correzione aumenta di intensità ety diminuisce; nel frattempo compaiono i segnali tx e z;
100

• la chiusura sequenziale anche del controllo su tx e su z;
• il raggiungimento del punto di lavoro del payload.
Figura 4.29: finestra di visualizzazione di dataDisplay : sono riportati i segnaliprincipali durante la chiusura del servo loop.
4.2.3 Sistema di attuazioneDopo aver misurato i movimenti compiuti dal payload e aver calcolato i segnalidi correzione per riportarlo nella posizione di lavoro, si devono applicare questecorrezioni al sistema tramite degli appositi attuatori. In particolare, grazie alsistema di attuazione è possibile allineare lo specchio rapidamente senza eccitare imodi propri del payload.
Gli attuatori sono composti da coppie bobine-magneti permanenti: nel nostroprototipo abbiamo quattro coppie al livello specchio, con le bobine attaccate allamassa di reazione e i magneti al retro dello specchio, e quattro al livello marionetta,con le bobine ancorate rigidamente alla struttura che sorregge il payload e i magnetisui supporti laterali della marionetta stessa.
Le bobine della marionetta sono progettate [45] in modo da permettere l’ap-plicazione di un valore massimo della forza Fmax tale da garantire uno sposta-mento dell’apparato di 5 mrad in /y; mentre il valore massimo di corrente im-
101

messa nelle spire è idriver = 0, 1 A. Il rapporto tra queste due quantità si trovaessere Fmax/idriver = 0, 025N/A. Per lo specchio il valore della corrente che cir-cola nelle bobine e il valore minimo dello spostamento sono più bassi; perciò sesi calcola lo stesso rapporto per le bobine dello specchio si trova un valore diFmax/idriver = 0, 010N/A.
Rispettando queste condizioni e procedendo ad una ottimizzazione in cui sitiene conto anche del fatto che il sistema di attuazione non deve riscaldare il pay-load, si trovano le caratteristiche che le bobine devono avere, riportate in tab. 4.3;nella tabella è indicato il livello dove sono posizionate, l’orientazione del momentomagnetico quando scorre corrente, i gradi di libertà sui quali le bobine agiscono,il raggio esterno dell’avvolgimento di forma cilindrica, il numero di spire e l’im-pedenza complessiva stimata. Si noti che gli attuatori usati nel nostro prototiposono dello stesso tipo di quelli usati in Virgo.
n orientazione grado di libertà rest [cm] Navv %(Zcoil)[%]Ma 2 y /x, z 9,4 1092 12Ma 2 z /y, z 9,4 1092 12Mi 4 z /x, /y, z 2,8 256 5
Tabella 4.3: caratteristiche delle bobine del sistema di attuazione: le voci sonoindicate nel testo.
I magneti permanenti devono essere posizionati al centro della circonferenzaindividuata dagli avvolgimenti, in modo da ridurre l’accoppiamento tra i diversigradi di libertà in fase di attuazione.
In fig. 4.18 sono visibili le bobine di entrambi i livelli, mentre in fig. 4.30 sonoriportati i nomi dei singoli attuatori.
Figura 4.30: nomi delle bobine del livello marionetta e di quello specchio.
Se volessimo attuare una correzione nel grado di libertà /y dal piano marionetta,si dovrebbero usare le bobine Ma_Right e Ma_Left. Per le altre direzioni si faccia
102

riferimento alla tab. 4.4. Si noti che per la correzione lungo gli assi y e z si sonoscelte arbitrariamente le bobine da usare: in linea di principio si potevano prendereanche le altre due o usare tutte le bobine presenti. Inoltre, stabilita un’orientazionecoerente per i magneti per evitare gli accoppiamenti con campi elettromagnetici, iversi delle correnti che scorrono nelle due bobine devono essere concordi nel caso sivogliano fare delle traslazioni e discordi nel caso delle rotazioni: i versi e le bobineda usare sono decise tramite delle matrici scritte in damping.
Ma Mitx Front-Back Up-Downty Right-Left Right-Leftz Right-Left Right-Lefty Front-Back —
Tabella 4.4: uso delle bobine per ricreare i gradi di libertà: è possibile avere ancheil movimento nella direzione y.
4.2.4 Prime operazioniDopo aver assemblato il sistema, montato tutti i rivelatori e collegato le schededel cestello tra loro, dobbiamo compiere un serie di operazioni necessarie per lacorretta misurazione delle funzioni di trasferimento meccaniche: si deve assicurareche il fascio laser sia abbastanza centrato sui quadranti dei fotodiodi, si deve avereuna corretta diagonalizzazione dei segnali (ogni grado di libertà deve essere il piùpossibile indipendente dagli altri) e si deve e!ettuare la loro calibrazione.
Il centraggio del fascio laser sui fotodiodi è importante per avere una dinamicail più possibile ampia: infatti se il fascio è spostato da un lato, quando lo specchiooscilla, la leva ottica rischia di uscire prima dalla regione di rilevamento. Per cen-trare il fascio si usano le slitte micrometriche con precisione di 10 µm, poste sottoil fotodiodo considerato, che muovono il rivelatore nelle due direzioni trasversali alfascio.
La diagonalizzazione dei segnali avviene in tre fasi distinte, non necessariamen-te commutabili tra loro: questo implica che bisogna sempre verificare il correttoprocedimento ripetendo le fasi iterativamente.
Innanzitutto bisogna distinguere tra:
1. la diagonalizzazione dei segnali di errore (sensing diagonalization): dobbiamogarantire che facendo la misura ad un fissato grado di libertà non ci sianofrequenze proprie di un altro grado (Appendice B). Si procede in due fasi:
• spostando meccanicamente il fotodiodo;
103

• definendo una matrice di conversione nel Gx Server;
Nella prima fase si parla di diagonalizzazione ottica: se il fotodiodo non sitrova esattamente sul piano focale o sul piano immagine, si possono vedererispettivamente anche parte dei movimenti traslatori e rotazionali (eqq. 4.10,4.11). Prendiamo ad esempio /y, visibile con il fotodiodo PSDf, sul pianofocale del livello specchio: graficando con dataDisplay lo spettro dei dati dityPSDf si possono trovare frequenze caratteristiche di /x o z. Per eliminareparte del contributo di z dobbiamo spostare lievemente il fotodiodo paral-lelamente al fascio tramite la sua slitta micrometrica per portarlo sul pianofocale: guardando il segnale in acquisizione si vede se i picchi corrispondentialle frequenze proprie di z diminuiscono di intensità e quindi se si sta rag-giungendo il piano interessato. Per ridurre il contributo di /x, invece, si deveusare una diversa slitta, detta culla, che provoca una rotazione attorno al-l’asse ortogonale al piano individuato dal quadrante del fotodiodo. Se gli assiche individuano i diversi elettrodi del fotodiodo non sono paralleli agli assidi riferimento (fig. 4.31), le asimmetrie Ax e Ay non sono calcolate corret-tamente, contenendo entrambi le proiezioni dei segnali /x e /y. In seguito siripete la stessa procedura per il fotodiodo del livello marionetta.
Figura 4.31: diagonalizzazione del /x e del /y tramite la culla: si noti l’inclinazionedegli assi sul quadrante del PSD.
Dopo aver minimizzato meccanicamente le sovrapposizioni dei diversi gradidi libertà si attua la restante diagonalizzazione dei segnali di errore tramiteil Gx Server (diagonalizzazione modale), cercando di eliminare gli ultimicontributi spuri: in questo modo si scrive la matrice presentata in tab. 4.2.Si procede anche qui partendo dalle frequenze caratteristiche di un fissatogrado di libertà, ad esempio sempre /y del livello specchio. Osservando lospettro di ty, si possono trovare frequenze proprie di altri gradi di libertà chevanno sottratte al segnale combinando Ax e Ay in modo opportuno; nella
104
tab. 4.2, l’operazione che si compie per ottenere ty è:
ty = 10000 · Ax (4.15)
e analogalmente per tx:tx = "10000 · Ay (4.16)
dove i fattori 10000 e "10000 sono espressi in µrad/V .Si può notare che:
(a) l’asimmetria lungo x è proporzionale a ty e viceversa: questo è ovvio sesi pensa a come sono costruiti i segnali e a come avvengono i movimentinello spazio (fig. 3.6);
(b) i segnali sono ben diagonalizzati semplicemente utilizzando il metodoottico; infatti su ty non c’è nessun contributo di Ay, e in modo analogoper tx.
2. la diagonalizzazione dei segnali di correzione (driving diagonalization): sideve assicurare che applicando la correzione ad un fissato grado di libertànon la si stia anche applicando ad un altro. Questo può succedere se imagneti non sono ben centrati rispetto alla rispettiva bobina oppure se lebobine presentano delle diversità tra di loro. Infatti se le bobine hanno unadi!erente impedenza, quando gli si applica la stessa tensione, la correnteche scorre è diversa, quindi varia anche il valore del campo magnetico che sigenera e la forza magnetica con cui si attrae il magnete permanente.Queste imperfezioni del sistema diventano riconoscibili quando si manda allebobine una tensione con una determinata frequenza, diversa da quelle modalidel payload. Prendiamo ad esempio sempre il segnale ty, corrispettivo di /y
e al posto della correzione, poniamo tyCorMa pari ad un segnale sinusoidalea frequenza fcomb, da applicare al livello marionetta. Nella tab. 4.4 in cuisono riportate le bobine necessarie per compiere le correzioni su uno specificogrado di libertà, contenuta all’interno di damping, possiamo vedere che perrealizzare tyCorMa si devono usare le bobine Ma_Left e Ma_Right. Sequeste bobine presentano i difetti sopra accennati, visualizzando lo spettrodi ty con dataDisplay, si possono osservare frequenze diverse da quelle tipichedi /y.Per eliminare queste frequenze, dobbiamo modificare la matrice di correzionecontenuta in damping : tale matrice indica i guadagni delle singole bobine perottenere la tensione da applicare a un dato grado di libertà. Per un sistemaben bilanciato, senza imperfezioni meccaniche si avrebbe, ad esempio sempreper /y:
tyCorMa = VMa_L + VMa_R (4.17)
105

ovvero la tensione applicata alla bobina Ma_Left è uguale a quello applicatoalla bobina Ma_Right. Nel nostro caso invece si ha:
tyCorMa = 0, 894VMa_L + 1, 106VMa_R (4.18)
Ciò implica che la bobina Ma_Left ha una resistenza interna leggermenteminore rispetto a quella di Ma_Right. Analogalemente si procede per glialtri gradi di libertà, sia al livello specchio, sia al livello marionetta.
L’ultima operazione da compiere prima di e!ettuare le misure è la calibrazionedei segnali. Per calibrare ty si può procedere in questo modo: se conosciamo lospostamento lineare percorso dal fascio laser e misurato prima della lente, tramitela matrice di eq. 4.7, risaliamo al suo spostamento in angolo e allo spostamentodello specchio che è la metà. Prendiamo come spostamento lineare quello compiu-to dal fascio esattamente sulla lente, da parte a parte, così da essere facilmentetraguardabile e calcoliamo quanto vale; quando lo specchio si trova in una fissataposizione, il fascio laser avrà angolo /1 e posizione X1 sulla lente:
1X1
/1
2
=
11 L0 1
2
·1
X/
2
(4.19)
dove per le grandezze si fa riferimento alla fig. 4.21. Quando lo specchio si spostain /y, avremo una nuova posizione sulla lente X "
1 e un nuovo angolo /"1, per cui valela stessa relazione:
X "1 = X " + L/" (4.20)
dove stiamo tralasciando l’equazione per /"1, non utile ai nostri fini. Lo sposta-mento compiuto dal fascio sulla lente è dato da:
X1 "X "1 = (X "X ") + L(/ " /") (4.21)
Se il fascio è esattamente centrato sullo specchio, così da vedere un motopuramente torsionale, possiamo trascurare il primo addendo ed avere soltanto:
X1 "X "1 = L(/ " /") (4.22)
Ora, L è la distanza tra la lente e lo specchio (132, 5 ± 0, 5 cm), la quantitàX1 " X "
1 è la larghezza della lente (0, 52 ± 0, 01 cm), quindi si può trovare lospostamento angolare del fascio, pari a 39, 24 ± 0, 16 mrad, dove l’errore è statopropagato. Lo spostamento angolare dello specchio è di 19, 62± 0, 08 mrad.
Questo spostamento angolare deve essere uguale a quello misurato tramite il GxServer e visualizzato con dataDisplay. Utilizzando il sistema di controllo, è possibileorientare il payload aggiungendo un valore di tensione alla correzione tyCorMa,
106
tramite la funzione ADD; infatti se operiamo a controllo chiuso questo implica unospostamento fisico dello specchio in /y. Allora possiamo far spaziare il fascio lasersu tutta la larghezza della lente: raggiunti i bordi estremi della lente, controlliamosul grafico di ty in funzione del tempo il valore che assume e così troviamo lospostamento angolare da calibrare, pari a 24 mrad. Si procede analogalmenteanche per tx; mentre per la traslazione in z si usa la stima telemetrica elaboratadal Gx Server.
Lo stesso procedimento si può applicare sia per il livello specchio, sia per quellomarionetta. Inoltre, durante il montaggio si è fatto in modo che la distanza tralo specchio e la lente del suo livello fosse uguale alla distanza tra lo specchio dellamarionetta e la lente del suo livello. In questo modo la calibrazione risulta moltosimile.
È importante infatti che i segnali siano intercalibrati tra di loro: dato che ilcontrollo passa sequenzialmente e in modo automatico da un segnale all’altro, du-rante il passaggio, se è presente una di!erenza di o!set o di ampiezza, si rischia unsalto di tensione nelle variabili di correzione. La forza applicata ai corpi del pay-load tramite il sistema di attuazione diventerebbe di tipo impulsivo e si potrebberoeccitare anche dei suoi modi interni.
Vediamo come si e!ettua l’intercalibrazione tra il segnale ty e tyPSDm: quandoil controllo è aperto, il payload oscilla in /y naturalmente alla frequenza di 26mHz(Appendice B e sez. 5.2.1). Questa frequenza corrisponde a quella del payload nelsuo insieme, quindi deve essere visibile con la stessa intensità sia al livello specchioche al livello marionetta. Se è presente una di!erenza di intensità, bisogna calibrareuno dei due segnali rispetto all’altro.
Per vedere la di!erenza di intensità, con dataDisplay, possiamo:
• graficare ty e tyPSDm in funzione del tempo e sovrapporre i due segnali: unavolta individuata l’oscillazione alla frequenza di 26 mHz si può misurare ladi!erenza di ampiezza; in questo modo si riesce a valutare anche un’eventualediscrepanza di o!set ;
• calcolare le trasformate di Fourier di ty e di tyPSDm: si misurano le intensitàdei picchi alla frequenza globale del payload ;
• calcolare la funzione di trasferimento tra ty e tyPSDm: il valore dell’ampiezzadella curva risultante alla frequenza di 26 mHz è il rapporto tra questi duesegnali.
Tutti i metodi devono portare allo stesso risultato. Una volta trovata la dif-ferenza di ampiezza tra ty e ty PSDm, si possono intercalibrare i segnali tramiteil Gx Server o tramite damping. Nel primo caso, si devono cambiare i coe"cientidella voce PSD, in corrispondenza dei valori di o!set e di ampiezza. Nel secondo,si possono aggiungere delle operazioni di ADD per sommare a ty o a tyPSDm laquantità mancante.
107
Capitolo 5
Caratterizzazione del prototipo dipayload
Per ottenere la caratterizzazione completa del prototipo di payload dotato di so-spensioni monolitiche occorre misurare le funzioni di trasferimento meccaniche: inquesto modo si trovano le frequenze proprie del sistema (Appendice B) sulla basedelle quali si progettano i filtri di controllo.
Le misure ottenute si devono confrontare con le funzioni di trasferimento teori-che, calcolabili con il metodo delle matrici di trasferimento: con un programma ap-positamente scritto, è possibile variare il valore dei parametri presenti nella model-lizzazione per ottimizzarla rispetto ai dati sperimentali e ricavare così informazioniriguardanti il sistema stesso.
In questo capitolo definiremo le funzioni di trasferimento meccaniche, descrive-remo il processo di misura utilizzato e il modello teorico. Saranno poi presentati irisultati delle misure e!ettuate in quattro diverse configurazioni del payload :
configurazione I fili in acciaio - supporti verticali in acciaio (fig. 5.1(a));
configurazione II fili in silice fusa - supporti verticali in acciaio (fig. 5.1(b));
configurazione III fili in silice fusa - supporti verticali in silice fusa (baricentrodella marionetta alzato di ) 3mm, fig. 5.1(c));
configurazione IV fili in silice fusa - supporti verticali in silice fusa (baricentrodella marionetta alzato di ) 6mm, fig. 5.1(d));
L’esperimento di far variare la posizione verticale del baricentro della marionet-ta non era mai stato fatto in precedenza. Esso è cruciale innanzitutto per validaresperimentalmente le previsioni del modello teorico e in secondo luogo per sceglie-re la migliore configurazione considerando la sospensione nel suo insieme e il suoutilizzo nell’interferometro.
Per motivi pratici la variazione della quota del centro di massa è stata e!ettua-ta tramite lo spostamento di due inserti cilindrici di alluminio presenti nel corpo
108
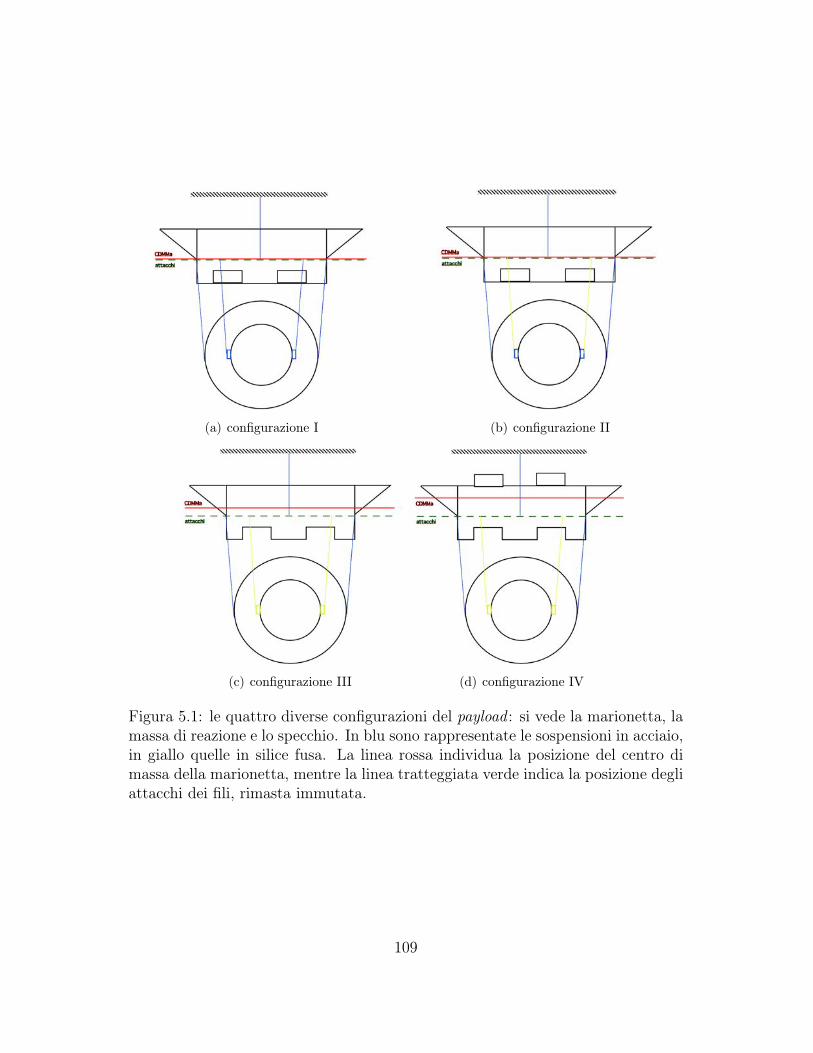
(a) configurazione I (b) configurazione II
(c) configurazione III (d) configurazione IV
Figura 5.1: le quattro diverse configurazioni del payload : si vede la marionetta, lamassa di reazione e lo specchio. In blu sono rappresentate le sospensioni in acciaio,in giallo quelle in silice fusa. La linea rossa individua la posizione del centro dimassa della marionetta, mentre la linea tratteggiata verde indica la posizione degliattacchi dei fili, rimasta immutata.
109

del prototipo della marionetta (fig. 4.8): nella configurazione III sono stati sempli-cemente rimossi, mentre nella configurazione IV, sono stati posti al di sopra dellamarionetta stessa.
Successivamente saranno confrontati i dati sperimentali con quelli aspettati esarà discusso il metodo di ottimizzazione nel processo di adattamento dei parametriteorici ai dati. Infine sarà proposto un nuovo modello per il payload per ridurregli accoppiamenti del sistema di sospensione.
5.1 Le funzioni di trasferimentoLa funzione di trasferimento indica come un sistema reagisce ad uno stimolo ester-no: è definita come il rapporto tra il segnale in uscita, la risposta del sistema, e ilsegnale in entrata, l’eccitazione.
Poniamo di avere un sistema con funzione di trasferimento nota h(t) in funzionedel tempo; sia x(t) l’eccitazione in ingresso, anch’essa in funzione del tempo. Allorala risposta del sistema y(t) è data dal prodotto di convoluzione:
y(t) = h(t) 1 x(t) =- %
#%h(t)x(t" ')d' (5.1)
Al fine di semplificare questo calcolo è conveniente introdurre le analoghe fun-zioni nel dominio delle frequenze. Per farlo si applica la trasformata di Fourier alsegnale in ingresso x(t) [61]:
X(,) =1
2"
- %
#%e#i+tx(t)dt (5.2)
o più in generale applicando la trasformata di Laplace:
X(s) =- %
#%e#stx(t)dt (5.3)
dove s è un numero complesso la cui parte reale è 1 e la cui parte immaginariacorrisponde proprio alla pulsazione ,:
s = 1 + i, (5.4)
Introdotte X(s) e H(s) l’eq. 5.1 diventa semplicemente il prodotto tra X(s) eH(s) (fig. 5.2):
Y (s) = H(s) ·X(s) (5.5)
La funzione di trasferimento può essere espressa con una generica funzionerazionale [62]:
H(s) =N(s)
D(s)=
=mj=0 bjsj
=nj=0 ajsj
(5.6)
110
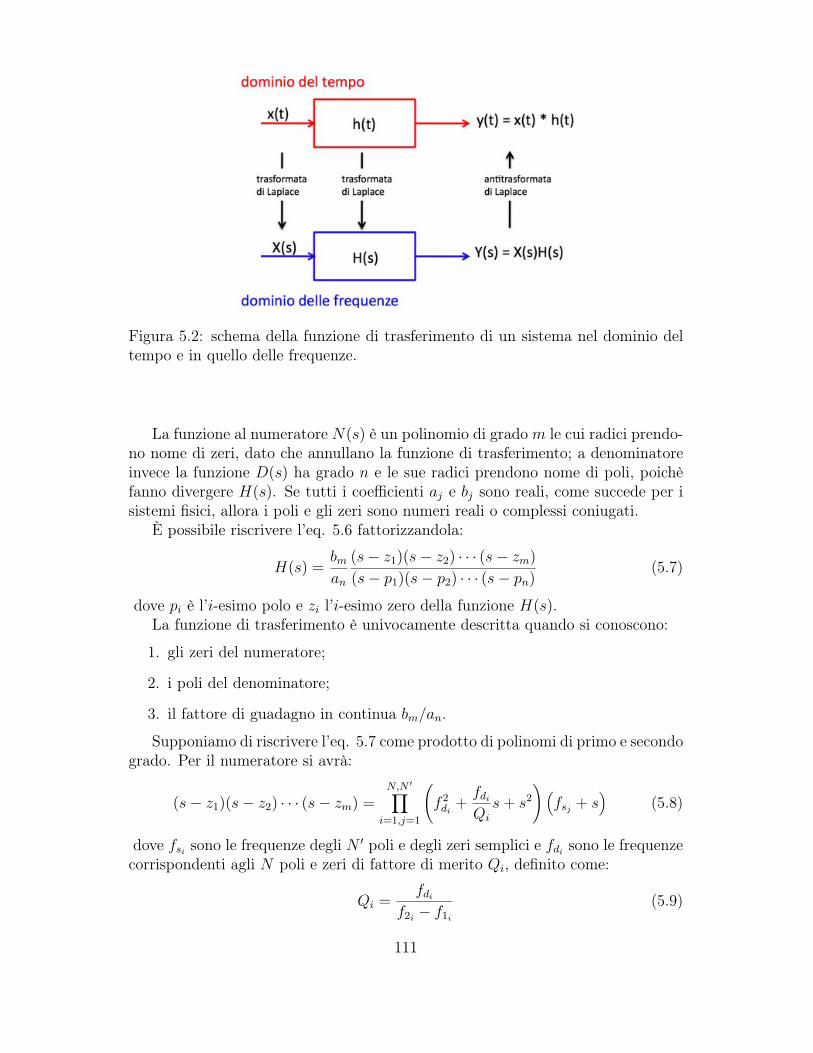
Figura 5.2: schema della funzione di trasferimento di un sistema nel dominio deltempo e in quello delle frequenze.
La funzione al numeratore N(s) è un polinomio di grado m le cui radici prendo-no nome di zeri, dato che annullano la funzione di trasferimento; a denominatoreinvece la funzione D(s) ha grado n e le sue radici prendono nome di poli, poichèfanno divergere H(s). Se tutti i coe"cienti aj e bj sono reali, come succede per isistemi fisici, allora i poli e gli zeri sono numeri reali o complessi coniugati.
È possibile riscrivere l’eq. 5.6 fattorizzandola:
H(s) =bm
an
(s" z1)(s" z2) · · · (s" zm)
(s" p1)(s" p2) · · · (s" pn)(5.7)
dove pi è l’i-esimo polo e zi l’i-esimo zero della funzione H(s).La funzione di trasferimento è univocamente descritta quando si conoscono:
1. gli zeri del numeratore;
2. i poli del denominatore;
3. il fattore di guadagno in continua bm/an.
Supponiamo di riscrivere l’eq. 5.7 come prodotto di polinomi di primo e secondogrado. Per il numeratore si avrà:
(s" z1)(s" z2) · · · (s" zm) =N,N !>
i=1,j=1
1
f 2di
+fdi
Qis + s2
2 ?fsj + s
@(5.8)
dove fsi sono le frequenze degli N " poli e degli zeri semplici e fdi sono le frequenzecorrispondenti agli N poli e zeri di fattore di merito Qi, definito come:
Qi =fdi
f2i " f1i
(5.9)
111

dove f1i e f2i sono le frequenze in cui la funzione assume valore pari a 1/-
2 delmassimo. In ogni caso Q non assume mai valori minori di 0, 5: infatti Q può esserelegato intuitivamente al numero di oscillazioni che un oscillatore smorzato compieprima di raggiungere lo zero. Nel caso limite è presente solo mezza oscillazione(fig. 5.3).
Figura 5.3: esempio dell’andamento della funzione di trasferimento dotataunicamente di un polo doppio, al variare del fattore di merito di un polo.
Qualcosa di analogo si ha per il denominatore.Dato che la funzione di trasferimento è una funzione complessa, per essere
rappresentata completamente necessita di due informazioni, l’ampiezza e la fase:
• un polo provoca una diminuzione della pendenza dell’ampiezza come ,n, doven è il grado del polo; prima della diminuzione si ha però la formazione di unpicco tanto più accentuato quanto maggiore è il fattore di merito Q associatoad esso (si noti che se Q < 1, non è presente nessun picco e l’ampiezzadiminuisce in modo monotono). Similmente, un polo provoca la diminuzionedella fase con pendenza maggiore tanto più alto è il grado del polo: se il poloè di ordine due si ha una diminuzione della fase di ".
• uno zero provoca invece un aumento della pendenza dell’ampiezza come ,n,dove n è sempre il grado dello zero; in questo caso prima dell’inizio del-l’aumento di pendenza si ha la formazione di una valle, tanto più marcataquanto maggiore è il valore del fattore di merito. Uno zero provoca anche unaumento della fase: se è di ordine due si ha un aumento di ".
5.1.1 Esempio di un pendolo sempliceCalcoliamo la funzione di trasferimento per un sistema fisico semplice, come quellocostituito dal pendolo di fig. 5.4.
La frequenza di risonanza fris di un pendolo di lunghezza l in cui la massaappesa è puntiforme, è:
fris =1
2"
Ag
l(5.10)
112
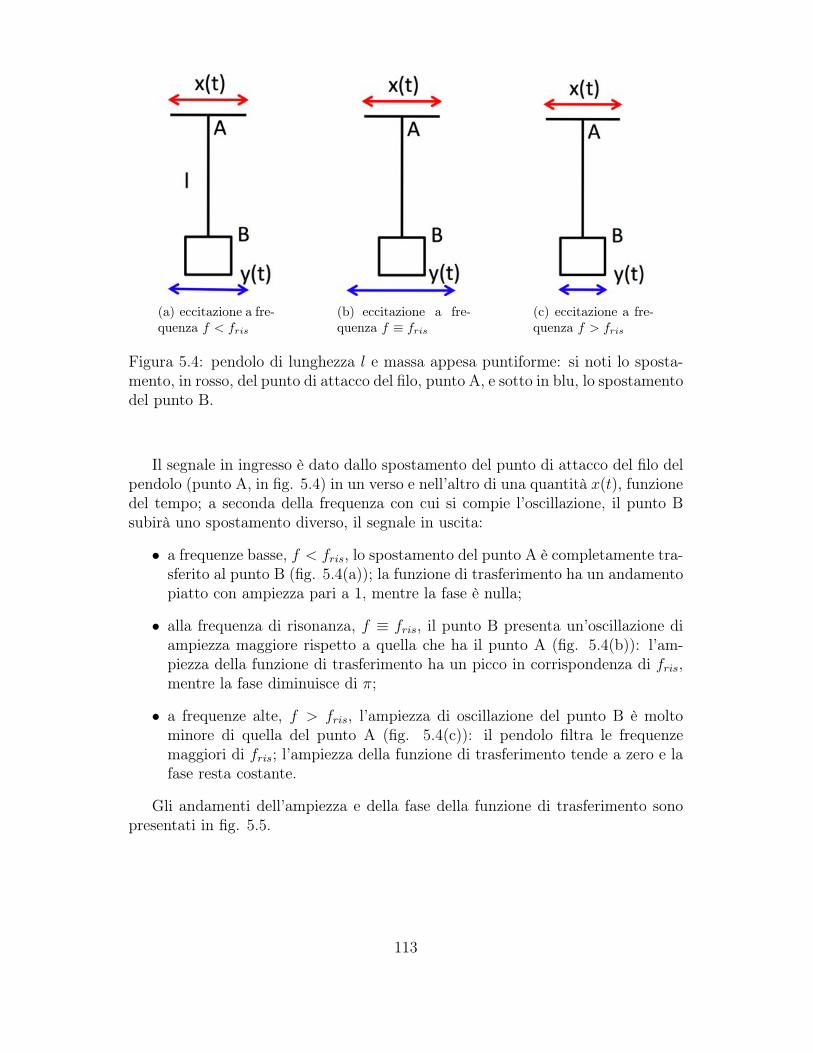
(a) eccitazione a fre-quenza f < fris
(b) eccitazione a fre-quenza f $ fris
(c) eccitazione a fre-quenza f > fris
Figura 5.4: pendolo di lunghezza l e massa appesa puntiforme: si noti lo sposta-mento, in rosso, del punto di attacco del filo, punto A, e sotto in blu, lo spostamentodel punto B.
Il segnale in ingresso è dato dallo spostamento del punto di attacco del filo delpendolo (punto A, in fig. 5.4) in un verso e nell’altro di una quantità x(t), funzionedel tempo; a seconda della frequenza con cui si compie l’oscillazione, il punto Bsubirà uno spostamento diverso, il segnale in uscita:
• a frequenze basse, f < fris, lo spostamento del punto A è completamente tra-sferito al punto B (fig. 5.4(a)); la funzione di trasferimento ha un andamentopiatto con ampiezza pari a 1, mentre la fase è nulla;
• alla frequenza di risonanza, f $ fris, il punto B presenta un’oscillazione diampiezza maggiore rispetto a quella che ha il punto A (fig. 5.4(b)): l’am-piezza della funzione di trasferimento ha un picco in corrispondenza di fris,mentre la fase diminuisce di ";
• a frequenze alte, f > fris, l’ampiezza di oscillazione del punto B è moltominore di quella del punto A (fig. 5.4(c)): il pendolo filtra le frequenzemaggiori di fris; l’ampiezza della funzione di trasferimento tende a zero e lafase resta costante.
Gli andamenti dell’ampiezza e della fase della funzione di trasferimento sonopresentati in fig. 5.5.
113
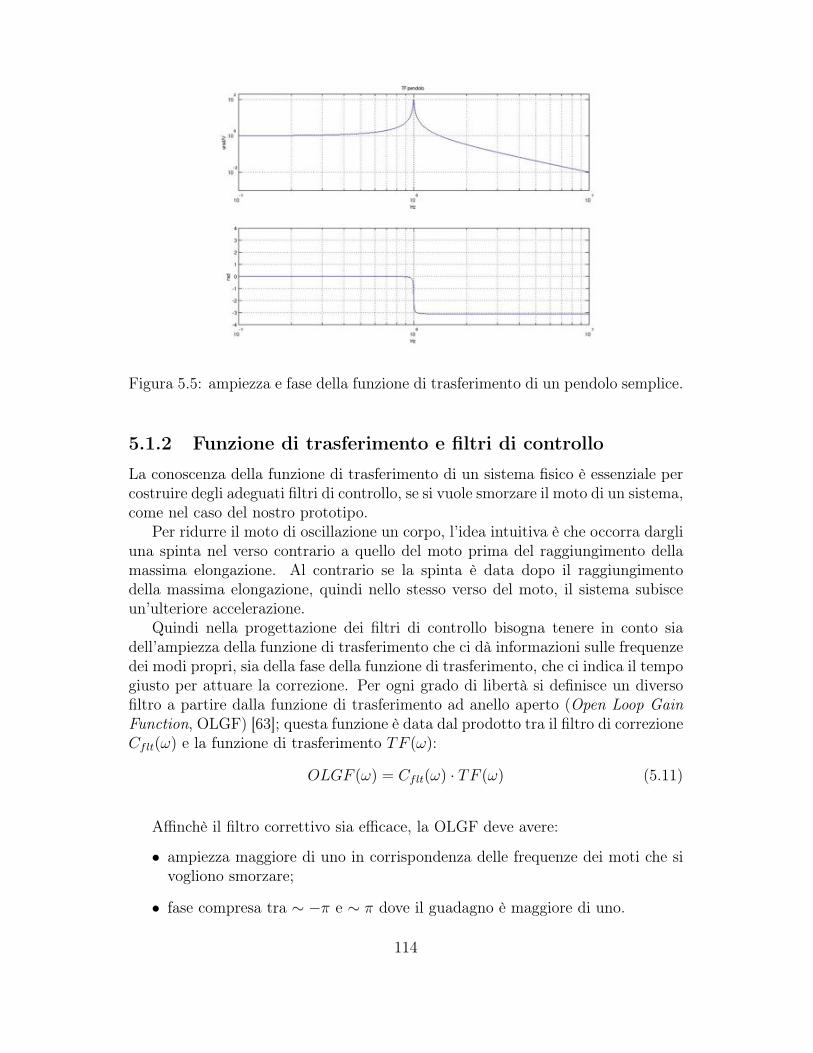
Figura 5.5: ampiezza e fase della funzione di trasferimento di un pendolo semplice.
5.1.2 Funzione di trasferimento e filtri di controlloLa conoscenza della funzione di trasferimento di un sistema fisico è essenziale percostruire degli adeguati filtri di controllo, se si vuole smorzare il moto di un sistema,come nel caso del nostro prototipo.
Per ridurre il moto di oscillazione un corpo, l’idea intuitiva è che occorra dargliuna spinta nel verso contrario a quello del moto prima del raggiungimento dellamassima elongazione. Al contrario se la spinta è data dopo il raggiungimentodella massima elongazione, quindi nello stesso verso del moto, il sistema subisceun’ulteriore accelerazione.
Quindi nella progettazione dei filtri di controllo bisogna tenere in conto siadell’ampiezza della funzione di trasferimento che ci dà informazioni sulle frequenzedei modi propri, sia della fase della funzione di trasferimento, che ci indica il tempogiusto per attuare la correzione. Per ogni grado di libertà si definisce un diversofiltro a partire dalla funzione di trasferimento ad anello aperto (Open Loop GainFunction, OLGF) [63]; questa funzione è data dal prodotto tra il filtro di correzioneCflt(,) e la funzione di trasferimento TF (,):
OLGF (,) = Cflt(,) · TF (,) (5.11)
A"nchè il filtro correttivo sia e"cace, la OLGF deve avere:
• ampiezza maggiore di uno in corrispondenza delle frequenze dei moti che sivogliono smorzare;
• fase compresa tra ) "" e ) " dove il guadagno è maggiore di uno.
114
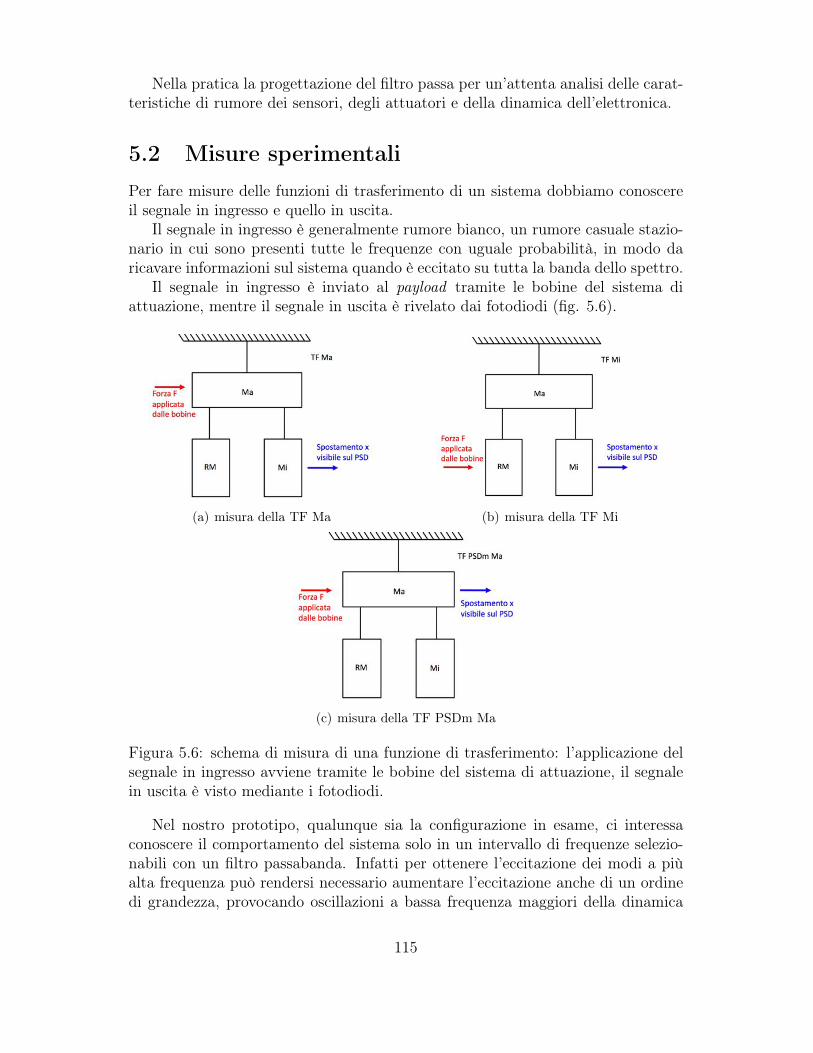
Nella pratica la progettazione del filtro passa per un’attenta analisi delle carat-teristiche di rumore dei sensori, degli attuatori e della dinamica dell’elettronica.
5.2 Misure sperimentaliPer fare misure delle funzioni di trasferimento di un sistema dobbiamo conoscereil segnale in ingresso e quello in uscita.
Il segnale in ingresso è generalmente rumore bianco, un rumore casuale stazio-nario in cui sono presenti tutte le frequenze con uguale probabilità, in modo daricavare informazioni sul sistema quando è eccitato su tutta la banda dello spettro.
Il segnale in ingresso è inviato al payload tramite le bobine del sistema diattuazione, mentre il segnale in uscita è rivelato dai fotodiodi (fig. 5.6).
(a) misura della TF Ma (b) misura della TF Mi
(c) misura della TF PSDm Ma
Figura 5.6: schema di misura di una funzione di trasferimento: l’applicazione delsegnale in ingresso avviene tramite le bobine del sistema di attuazione, il segnalein uscita è visto mediante i fotodiodi.
Nel nostro prototipo, qualunque sia la configurazione in esame, ci interessaconoscere il comportamento del sistema solo in un intervallo di frequenze selezio-nabili con un filtro passabanda. Infatti per ottenere l’eccitazione dei modi a piùalta frequenza può rendersi necessario aumentare l’eccitazione anche di un ordinedi grandezza, provocando oscillazioni a bassa frequenza maggiori della dinamica
115
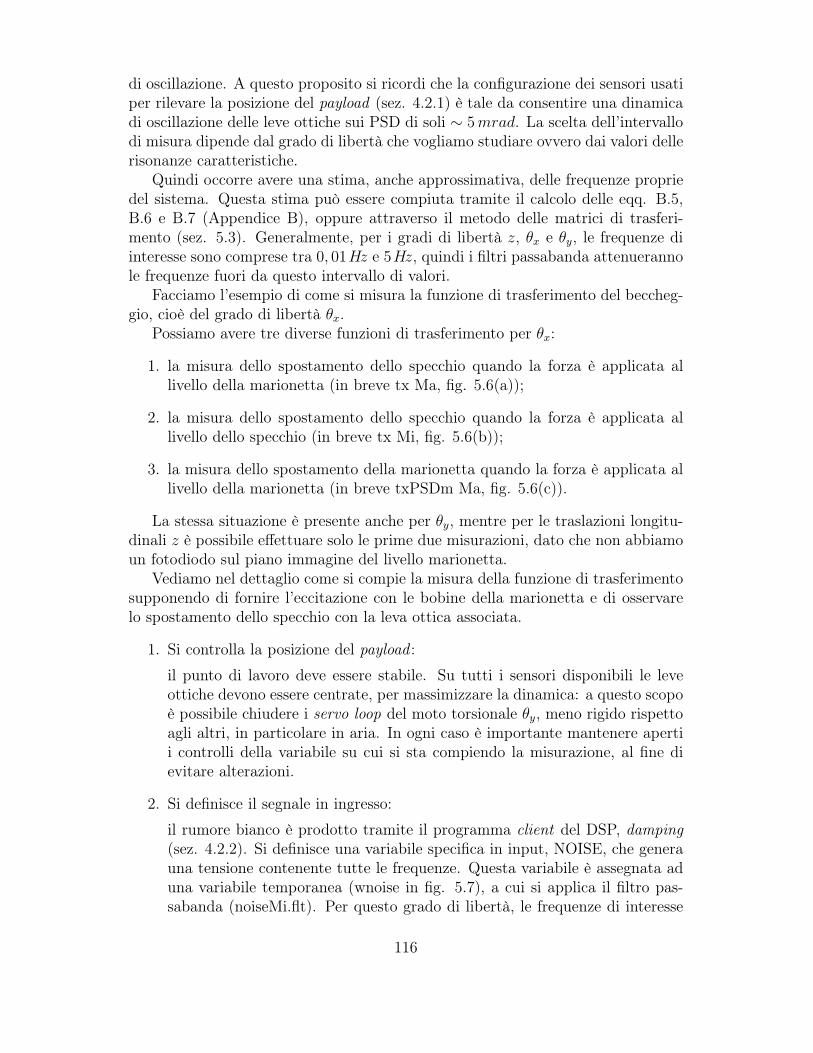
di oscillazione. A questo proposito si ricordi che la configurazione dei sensori usatiper rilevare la posizione del payload (sez. 4.2.1) è tale da consentire una dinamicadi oscillazione delle leve ottiche sui PSD di soli ) 5 mrad. La scelta dell’intervallodi misura dipende dal grado di libertà che vogliamo studiare ovvero dai valori dellerisonanze caratteristiche.
Quindi occorre avere una stima, anche approssimativa, delle frequenze propriedel sistema. Questa stima può essere compiuta tramite il calcolo delle eqq. B.5,B.6 e B.7 (Appendice B), oppure attraverso il metodo delle matrici di trasferi-mento (sez. 5.3). Generalmente, per i gradi di libertà z, /x e /y, le frequenze diinteresse sono comprese tra 0, 01Hz e 5Hz, quindi i filtri passabanda attenuerannole frequenze fuori da questo intervallo di valori.
Facciamo l’esempio di come si misura la funzione di trasferimento del beccheg-gio, cioè del grado di libertà /x.
Possiamo avere tre diverse funzioni di trasferimento per /x:
1. la misura dello spostamento dello specchio quando la forza è applicata allivello della marionetta (in breve tx Ma, fig. 5.6(a));
2. la misura dello spostamento dello specchio quando la forza è applicata allivello dello specchio (in breve tx Mi, fig. 5.6(b));
3. la misura dello spostamento della marionetta quando la forza è applicata allivello della marionetta (in breve txPSDm Ma, fig. 5.6(c)).
La stessa situazione è presente anche per /y, mentre per le traslazioni longitu-dinali z è possibile e!ettuare solo le prime due misurazioni, dato che non abbiamoun fotodiodo sul piano immagine del livello marionetta.
Vediamo nel dettaglio come si compie la misura della funzione di trasferimentosupponendo di fornire l’eccitazione con le bobine della marionetta e di osservarelo spostamento dello specchio con la leva ottica associata.
1. Si controlla la posizione del payload :il punto di lavoro deve essere stabile. Su tutti i sensori disponibili le leveottiche devono essere centrate, per massimizzare la dinamica: a questo scopoè possibile chiudere i servo loop del moto torsionale /y, meno rigido rispettoagli altri, in particolare in aria. In ogni caso è importante mantenere apertii controlli della variabile su cui si sta compiendo la misurazione, al fine dievitare alterazioni.
2. Si definisce il segnale in ingresso:il rumore bianco è prodotto tramite il programma client del DSP, damping(sez. 4.2.2). Si definisce una variabile specifica in input, NOISE, che generauna tensione contenente tutte le frequenze. Questa variabile è assegnata aduna variabile temporanea (wnoise in fig. 5.7), a cui si applica il filtro pas-sabanda (noiseMi.flt). Per questo grado di libertà, le frequenze di interesse
116

sono comprese tra 0, 4 Hz e 3, 6 Hz. Il filtro passabanda, necessario per sele-zionarle, è mostrato in fig. 5.8 e i poli e gli zeri del filtro stesso sono elencatiin tab. 5.1.
Figura 5.7: schermata del client damping per l’assegnazione del segnale in ingressodella funzione di trasferimento.
filtro tx: gain = 1 a 0, 2 Hzp/z f(Hz) Qz 0 /z 0 /z 0 /p 0, 1 /p 0, 1 0,5p 10 0,5
Tabella 5.1: poli e zeri del filtro passabanda per la funzione di trasferimento delgrado di libertà /x.
3. Si assegna il segnale in ingresso alla variabile interessata:il rumore bianco filtrato è inviato con un certo guadagno alla variabile dicorrezione, txCorMa nel nostro esempio, tramite cui si esercita la tensione delsegnale di eccitazione al payload. Si noti che con damping è possibile ancheapplicare un segnale diverso dal rumore bianco: ad esempio utilizzando la
117
Figura 5.8: filtro passabanda per la misura della funzione di trasferimento di /x.
funzione COMB del client, si produce una serie di sinusoidi alle frequenzevolute.
4. Si aumenta gradualmente il valore del guadagno del segnale di ingresso:infatti inizialmente il segnale di eccitazione è inviato al sistema di attuazionecon un guadagno basso (per /x si parte con gain = 0, 001), per non per-turbare troppo il sistema. Per lo stesso motivo, l’intervallo di tempo dellarampa deve essere su"cientemente lungo () 30 s). Dopo aver monitoratoil movimento dello specchio in funzione del tempo per qualche minuto, alfine di garantire la stazionarietà della risposta, si può aumentare il guadagnodell’eccitazione gradualmente, fino a raggiungere un valore per la quale lacoerenza tra la risposta rilevata dalla leva ottica e l’eccitazione fornita dagliattuatori è accettabile (valori maggiori di 0, 8).La coerenza indica la similarità esistente tra due grandezze: è definita comelo spettro di potenza normalizzato della correlazione incrociata tra le duevariabili scelte. La correlazione incrociata (x1y)(t) di due funzioni del tempocontinue x(t) e y(t) è definita come il prodotto di convoluzione:
cxy(t) =- %
#%x(t) · y(t + ')d' (5.12)
Applicando la trasformata di Fourier all’eq. 5.12, si ottiene lo spettro dipotenza della correlazione incrociata wxy(f), che può esser normalizzata con
118
i singoli spettri di potenza delle variabili x e y, wx(f) e wy(f); allora lacoerenza è data da [61]:
cxy(f) =wxy(f)
0wx(f)wy(f)
(5.13)
Quando la coerenza assume valore ) 1, significa che le due variabili sonocorrelate tra di loro. Quindi, nel nostro caso, se abbiamo che la coerenza tratx e txCorMa è ) 1 in un intervallo di frequenze, l’eccitazione e la rispostasono correlate tra loro e in quell’intervallo di frequenze il valore della funzionedi trasferimento ha significato.La coerenza e la funzione di trasferimento tra tx e txCorMa si può calcola-re e visualizzare direttamente in tempo reale con dataDisplay (sez. 4.2.2).Solitamente è consigliabile aggiungere anche i grafici delle funzioni di trasfe-rimento e della coerenza con gli altri gradi di libertà, per assicurarci che nonci siano accoppiamenti tra di essi.
5. Ottenuto un valore della coerenza maggiore di 0, 8, si procede a fare la misuradella funzione di trasferimento:possiamo lasciare il sistema in acquisizione per un intervallo di tempo suf-ficientemente lungo (Ttot ) 1 h), senza cambiare i valori delle grandezze.Si otterrà un risultato simile a quello mostrato nella fig. 5.9. Si noti chequesti dati sono mediati su un numero pari a nave acquisizioni della stessagrandezza, integrata per un periodo di Tint (sez. 4.2.2): in basso in fig. 5.9sono riportati i valori del tempo di integrazione (dt : 327, 68 s) e il numerodi medie e!ettuate (nAv : 17), con un interlacciamento del 50%.
6. Si salvano i dati dei grafici della funzione di trasferimento e si elaborano:finita l’acquisizione della misura, è possibile togliere l’eccitazione ed esportarei dati in un formato testo: i file testo contengono i valori delle frequenze e ivalori di ampiezza e fase della funzione di trasferimento, che possono esseregraficati successivamente tramite un programma di elaborazione scritto inMatlab.
In questo contesto del tutto generale trattiamo il caso specifico della misuradella funzione di trasferimento per il grado di libertà y di traslazione verticale,eseguita solo nella configurazione II, per cui si è proceduto nello stesso modo. Maal posto delle usuali leve ottiche, che non forniscono alcuna informazione riguardoquesto grado di libertà, si è usato un accelerometro. L’accelerometro PCB (mas-sa m = 232 g, sensibilità r = 10V/g dove g è l’accelerazione gravitazionale sullasuperficie terrestre) è stato posizionato su un braccio della marionetta, come mo-strato in fig. 5.10, così da essere meccanicamente accoppiato anche ai movimentitipici del grado di libertà /z e /x.
119
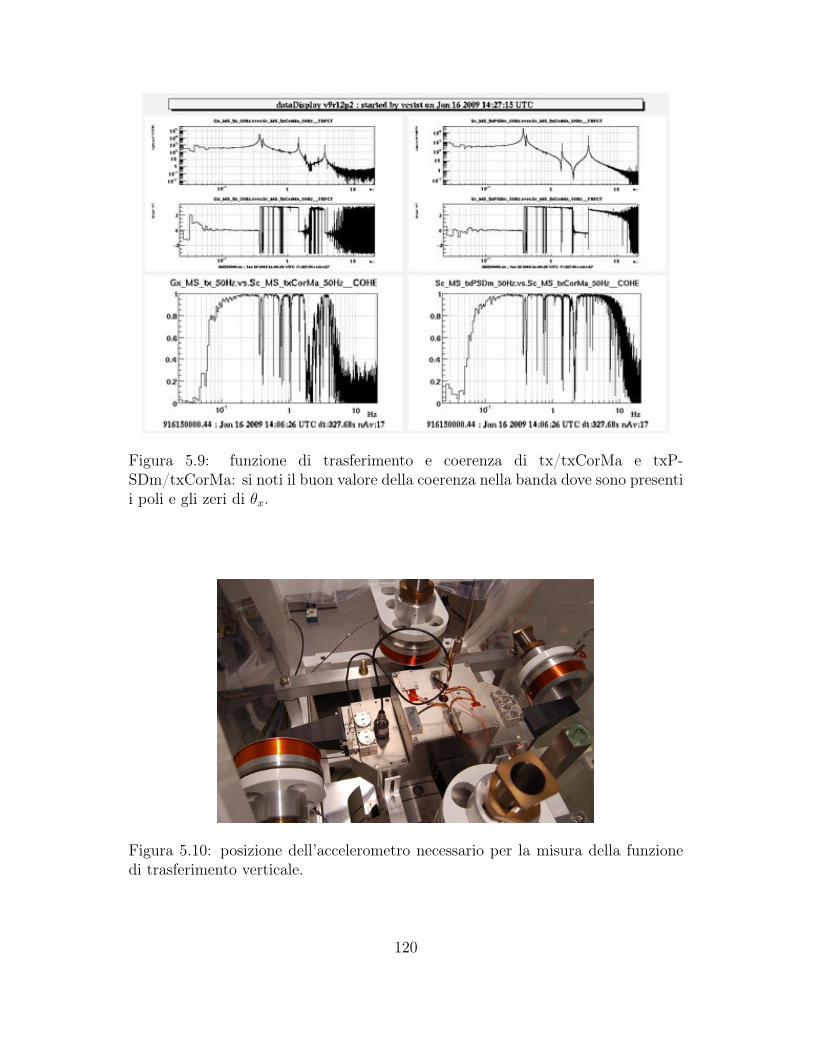
Figura 5.9: funzione di trasferimento e coerenza di tx/txCorMa e txP-SDm/txCorMa: si noti il buon valore della coerenza nella banda dove sono presentii poli e gli zeri di /x.
Figura 5.10: posizione dell’accelerometro necessario per la misura della funzionedi trasferimento verticale.
120

Durante la collocazione dello strumento, così come durante ogni altra operazio-ne di aggiustamento manuale del payload, si è posta particolare attenzione a nonalterare la posizione della marionetta stessa, bloccandola con degli opportuni fer-mi, in modo da mantenere il fascio laser all’interno dei fotodiodi. In questo modoè stato possibile continuare a monitorare anche gli altri gradi di libertà durante lamisura.
Purtroppo l’accelerometro ha un cavo di collegamento all’amplificatore piutto-sto spesso (in nero nella figura), il che determina un’alterazione nella configura-zione del sistema: per ridurre tale e!etto è necessario ancorare il cavo al filo disospensione della marionetta tramite delle anse morbide, così da ridurre la tensionemeccanica lungo il cavo. Il segnale in uscita dall’amplificatore dell’accelerometro èinviato ad un canale della scheda ADC e trattato come gli altri segnali provenientidai fotodiodi.
La funzione di trasferimento del grado di libertà y ha frequenze caratteristichetra ) 3 Hz e ) 25 Hz, per cui il filtro passabanda da applicare al rumore biancodovrà contenere questi valori; l’eccitazione è somministrata tramite le due bobineusate anche per /x, ma con il verso della corrente concorde (tab. 4.4).
5.2.1 Fit dei dati sperimentaliTramite un programma scritto nel linguaggio Matlab è possibile visualizzare i datiottenuti da dataDisplay e compiere una stima dei parametri che caratterizzano lafunzione di trasferimento, come le frequenze dei modi fondamentali e i loro fattoridi merito.
La curva che descrive l’andamento dei punti sperimentali è data dall’equazione5.8 che può essere riscritta in modo compatto:
TF (s) = Cn,n!>
i=1,j=1
1
f 2di
+fdi
Qis + s2
2gi ?fsj + s
@gj (5.14)
dove gi e gj sono pari a "1 nel caso di un polo e a 1 nel caso di uno zero.Con l’espressione data dalla eq. 5.14 si deducono delle curve che approssimano
i dati sperimentali molto buone (fig. 5.11), come dimostra anche la stima del 32,discusso nella sez. 5.2.2.
Riportiamo in fig. 5.12 come esempio del caso appena descritto la funzione ditrasferimento misurata per il grado di libertà /x. Al crescere della frequenza sihanno varie strutture:
1. a basse frequenze l’ampiezza della funzione di trasferimento ha un andamen-to piatto: infatti in questo intervallo di frequenze il sistema di pendoli delpayload risponde linearmente.
2. per f ) 0, 4 Hz si ha una coppia polo/zero, dovuta all’influenza del grado dilibertà z su /x.
121
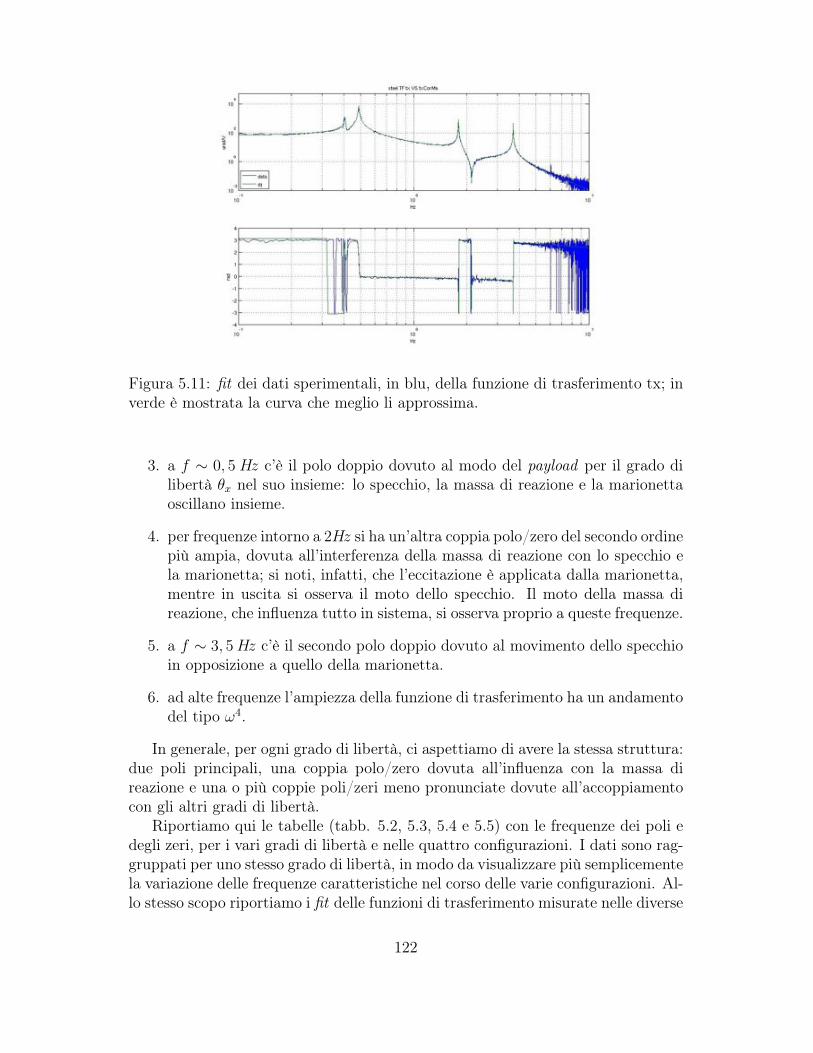
Figura 5.11: fit dei dati sperimentali, in blu, della funzione di trasferimento tx; inverde è mostrata la curva che meglio li approssima.
3. a f ) 0, 5 Hz c’è il polo doppio dovuto al modo del payload per il grado dilibertà /x nel suo insieme: lo specchio, la massa di reazione e la marionettaoscillano insieme.
4. per frequenze intorno a 2Hz si ha un’altra coppia polo/zero del secondo ordinepiù ampia, dovuta all’interferenza della massa di reazione con lo specchio ela marionetta; si noti, infatti, che l’eccitazione è applicata dalla marionetta,mentre in uscita si osserva il moto dello specchio. Il moto della massa direazione, che influenza tutto in sistema, si osserva proprio a queste frequenze.
5. a f ) 3, 5 Hz c’è il secondo polo doppio dovuto al movimento dello specchioin opposizione a quello della marionetta.
6. ad alte frequenze l’ampiezza della funzione di trasferimento ha un andamentodel tipo ,4.
In generale, per ogni grado di libertà, ci aspettiamo di avere la stessa struttura:due poli principali, una coppia polo/zero dovuta all’influenza con la massa direazione e una o più coppie poli/zeri meno pronunciate dovute all’accoppiamentocon gli altri gradi di libertà.
Riportiamo qui le tabelle (tabb. 5.2, 5.3, 5.4 e 5.5) con le frequenze dei poli edegli zeri, per i vari gradi di libertà e nelle quattro configurazioni. I dati sono rag-gruppati per uno stesso grado di libertà, in modo da visualizzare più semplicementela variazione delle frequenze caratteristiche nel corso delle varie configurazioni. Al-lo stesso scopo riportiamo i fit delle funzioni di trasferimento misurate nelle diverse
122
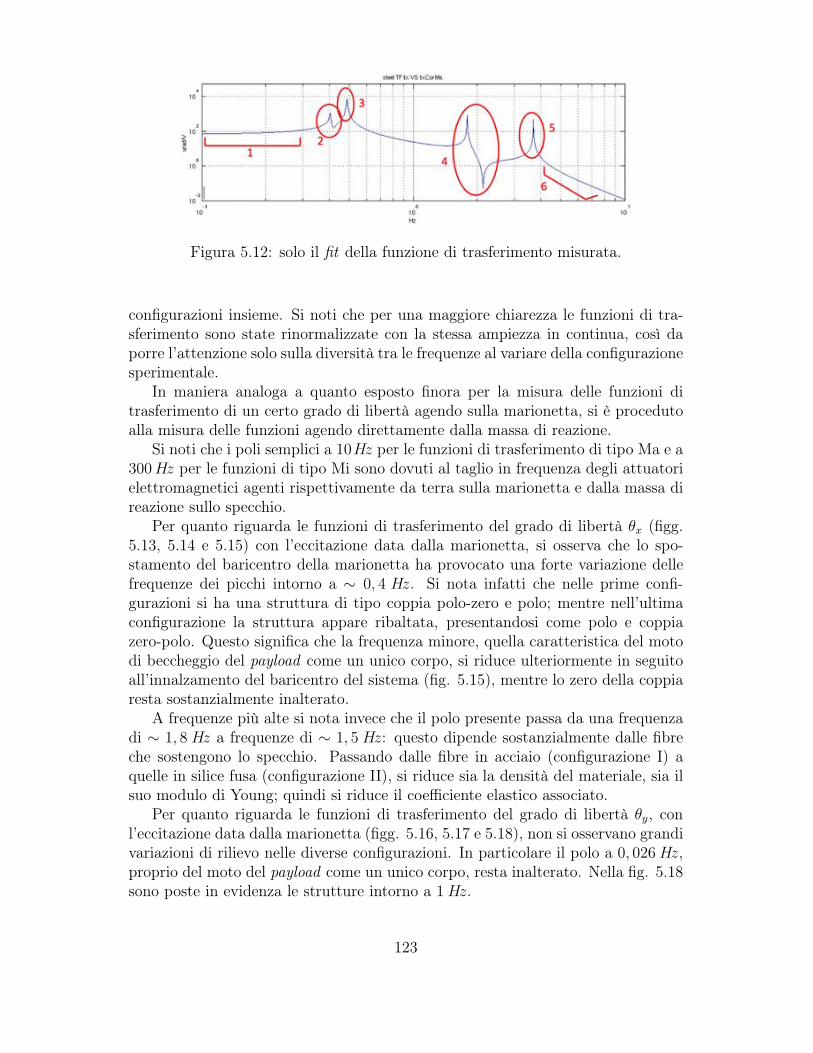
Figura 5.12: solo il fit della funzione di trasferimento misurata.
configurazioni insieme. Si noti che per una maggiore chiarezza le funzioni di tra-sferimento sono state rinormalizzate con la stessa ampiezza in continua, così daporre l’attenzione solo sulla diversità tra le frequenze al variare della configurazionesperimentale.
In maniera analoga a quanto esposto finora per la misura delle funzioni ditrasferimento di un certo grado di libertà agendo sulla marionetta, si è procedutoalla misura delle funzioni agendo direttamente dalla massa di reazione.
Si noti che i poli semplici a 10Hz per le funzioni di trasferimento di tipo Ma e a300 Hz per le funzioni di tipo Mi sono dovuti al taglio in frequenza degli attuatorielettromagnetici agenti rispettivamente da terra sulla marionetta e dalla massa direazione sullo specchio.
Per quanto riguarda le funzioni di trasferimento del grado di libertà /x (figg.5.13, 5.14 e 5.15) con l’eccitazione data dalla marionetta, si osserva che lo spo-stamento del baricentro della marionetta ha provocato una forte variazione dellefrequenze dei picchi intorno a ) 0, 4 Hz. Si nota infatti che nelle prime confi-gurazioni si ha una struttura di tipo coppia polo-zero e polo; mentre nell’ultimaconfigurazione la struttura appare ribaltata, presentandosi come polo e coppiazero-polo. Questo significa che la frequenza minore, quella caratteristica del motodi beccheggio del payload come un unico corpo, si riduce ulteriormente in seguitoall’innalzamento del baricentro del sistema (fig. 5.15), mentre lo zero della coppiaresta sostanzialmente inalterato.
A frequenze più alte si nota invece che il polo presente passa da una frequenzadi ) 1, 8 Hz a frequenze di ) 1, 5 Hz: questo dipende sostanzialmente dalle fibreche sostengono lo specchio. Passando dalle fibre in acciaio (configurazione I) aquelle in silice fusa (configurazione II), si riduce sia la densità del materiale, sia ilsuo modulo di Young; quindi si riduce il coe"ciente elastico associato.
Per quanto riguarda le funzioni di trasferimento del grado di libertà /y, conl’eccitazione data dalla marionetta (figg. 5.16, 5.17 e 5.18), non si osservano grandivariazioni di rilievo nelle diverse configurazioni. In particolare il polo a 0, 026 Hz,proprio del moto del payload come un unico corpo, resta inalterato. Nella fig. 5.18sono poste in evidenza le strutture intorno a 1 Hz.
123
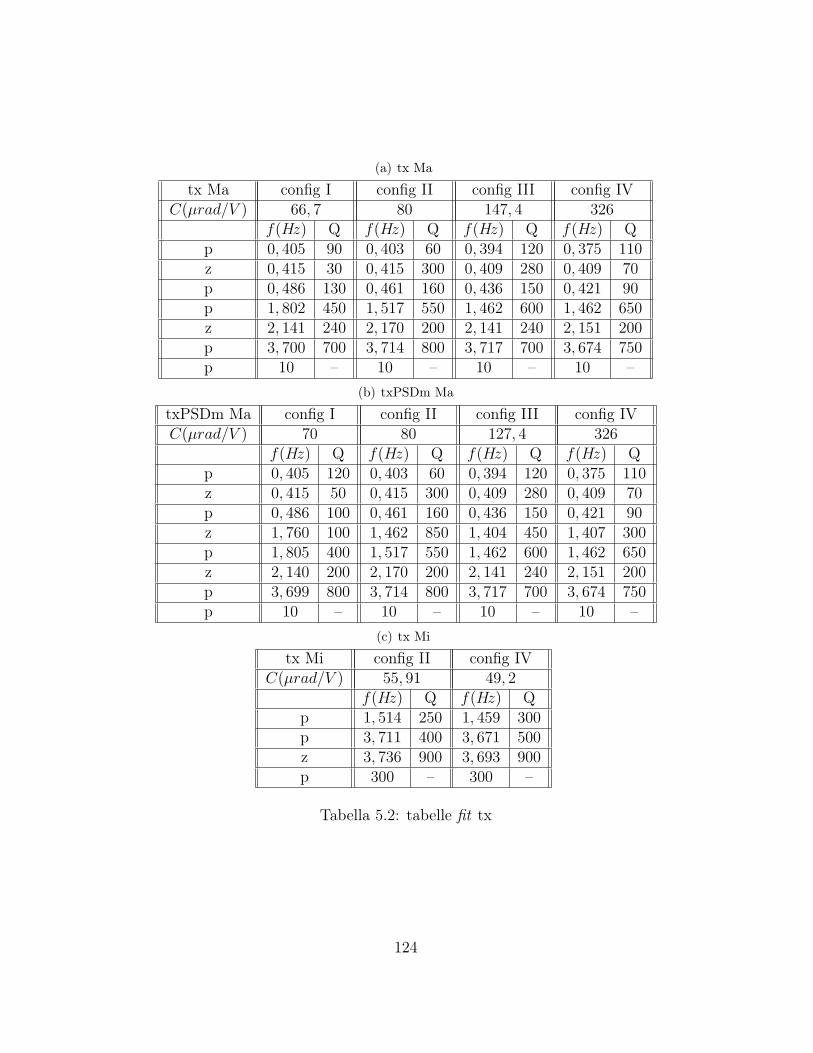
(a) tx Ma
tx Ma config I config II config III config IVC(µrad/V ) 66, 7 80 147, 4 326
f(Hz) Q f(Hz) Q f(Hz) Q f(Hz) Qp 0, 405 90 0, 403 60 0, 394 120 0, 375 110z 0, 415 30 0, 415 300 0, 409 280 0, 409 70p 0, 486 130 0, 461 160 0, 436 150 0, 421 90p 1, 802 450 1, 517 550 1, 462 600 1, 462 650z 2, 141 240 2, 170 200 2, 141 240 2, 151 200p 3, 700 700 3, 714 800 3, 717 700 3, 674 750p 10 – 10 – 10 – 10 –
(b) txPSDm Ma
txPSDm Ma config I config II config III config IVC(µrad/V ) 70 80 127, 4 326
f(Hz) Q f(Hz) Q f(Hz) Q f(Hz) Qp 0, 405 120 0, 403 60 0, 394 120 0, 375 110z 0, 415 50 0, 415 300 0, 409 280 0, 409 70p 0, 486 100 0, 461 160 0, 436 150 0, 421 90z 1, 760 100 1, 462 850 1, 404 450 1, 407 300p 1, 805 400 1, 517 550 1, 462 600 1, 462 650z 2, 140 200 2, 170 200 2, 141 240 2, 151 200p 3, 699 800 3, 714 800 3, 717 700 3, 674 750p 10 – 10 – 10 – 10 –
(c) tx Mi
tx Mi config II config IVC(µrad/V ) 55, 91 49, 2
f(Hz) Q f(Hz) Qp 1, 514 250 1, 459 300p 3, 711 400 3, 671 500z 3, 736 900 3, 693 900p 300 – 300 –
Tabella 5.2: tabelle fit tx
124
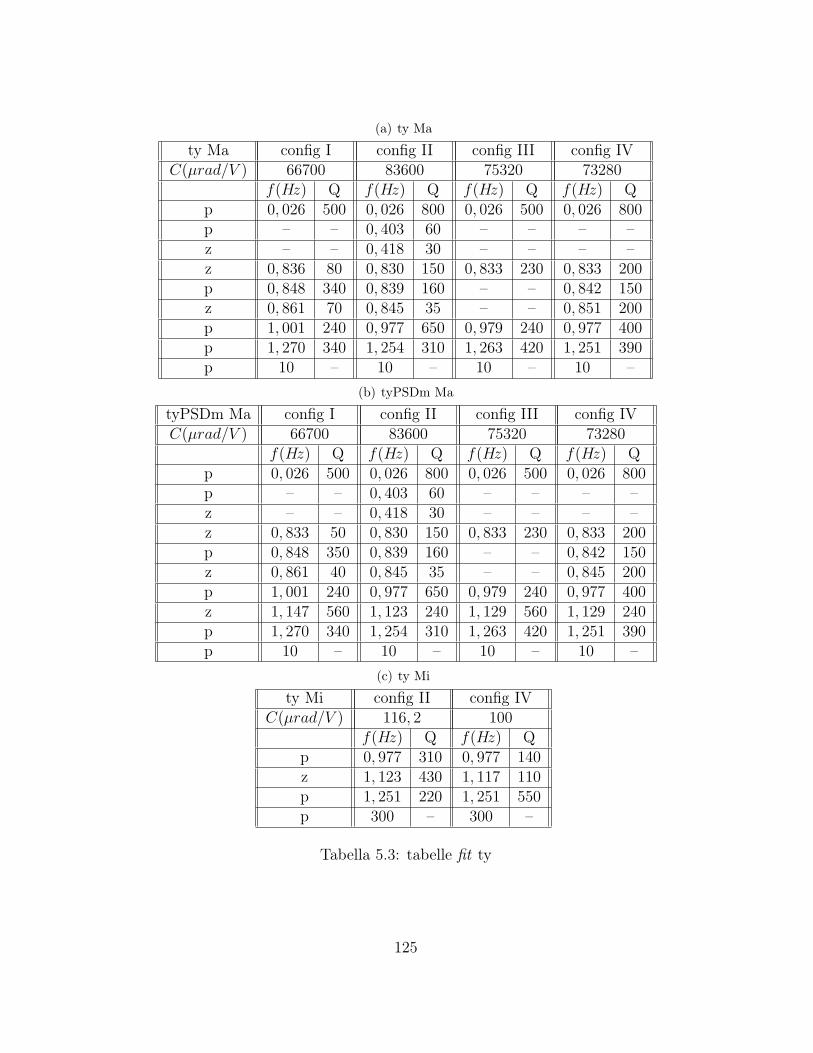
(a) ty Ma
ty Ma config I config II config III config IVC(µrad/V ) 66700 83600 75320 73280
f(Hz) Q f(Hz) Q f(Hz) Q f(Hz) Qp 0, 026 500 0, 026 800 0, 026 500 0, 026 800p – – 0, 403 60 – – – –z – – 0, 418 30 – – – –z 0, 836 80 0, 830 150 0, 833 230 0, 833 200p 0, 848 340 0, 839 160 – – 0, 842 150z 0, 861 70 0, 845 35 – – 0, 851 200p 1, 001 240 0, 977 650 0, 979 240 0, 977 400p 1, 270 340 1, 254 310 1, 263 420 1, 251 390p 10 – 10 – 10 – 10 –
(b) tyPSDm Ma
tyPSDm Ma config I config II config III config IVC(µrad/V ) 66700 83600 75320 73280
f(Hz) Q f(Hz) Q f(Hz) Q f(Hz) Qp 0, 026 500 0, 026 800 0, 026 500 0, 026 800p – – 0, 403 60 – – – –z – – 0, 418 30 – – – –z 0, 833 50 0, 830 150 0, 833 230 0, 833 200p 0, 848 350 0, 839 160 – – 0, 842 150z 0, 861 40 0, 845 35 – – 0, 845 200p 1, 001 240 0, 977 650 0, 979 240 0, 977 400z 1, 147 560 1, 123 240 1, 129 560 1, 129 240p 1, 270 340 1, 254 310 1, 263 420 1, 251 390p 10 – 10 – 10 – 10 –
(c) ty Mi
ty Mi config II config IVC(µrad/V ) 116, 2 100
f(Hz) Q f(Hz) Qp 0, 977 310 0, 977 140z 1, 123 430 1, 117 110p 1, 251 220 1, 251 550p 300 – 300 –
Tabella 5.3: tabelle fit ty
125
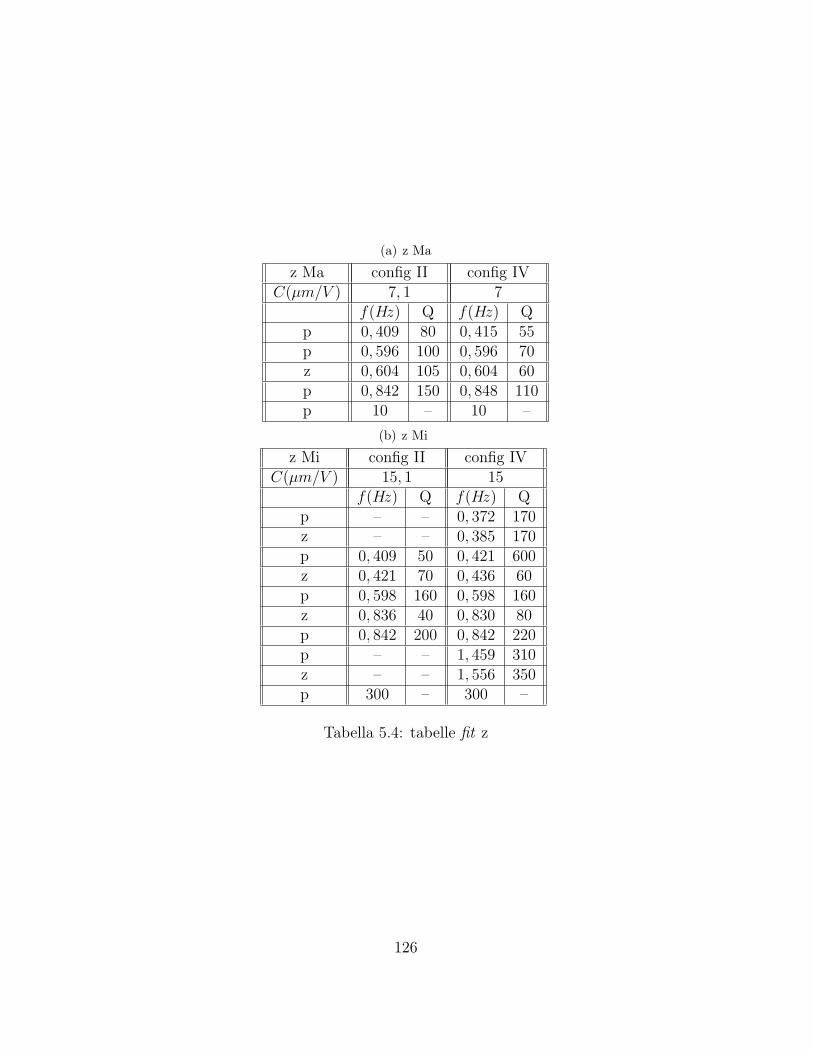
(a) z Ma
z Ma config II config IVC(µm/V ) 7, 1 7
f(Hz) Q f(Hz) Qp 0, 409 80 0, 415 55p 0, 596 100 0, 596 70z 0, 604 105 0, 604 60p 0, 842 150 0, 848 110p 10 – 10 –
(b) z Mi
z Mi config II config IVC(µm/V ) 15, 1 15
f(Hz) Q f(Hz) Qp – – 0, 372 170z – – 0, 385 170p 0, 409 50 0, 421 600z 0, 421 70 0, 436 60p 0, 598 160 0, 598 160z 0, 836 40 0, 830 80p 0, 842 200 0, 842 220p – – 1, 459 310z – – 1, 556 350p 300 – 300 –
Tabella 5.4: tabelle fit z
126
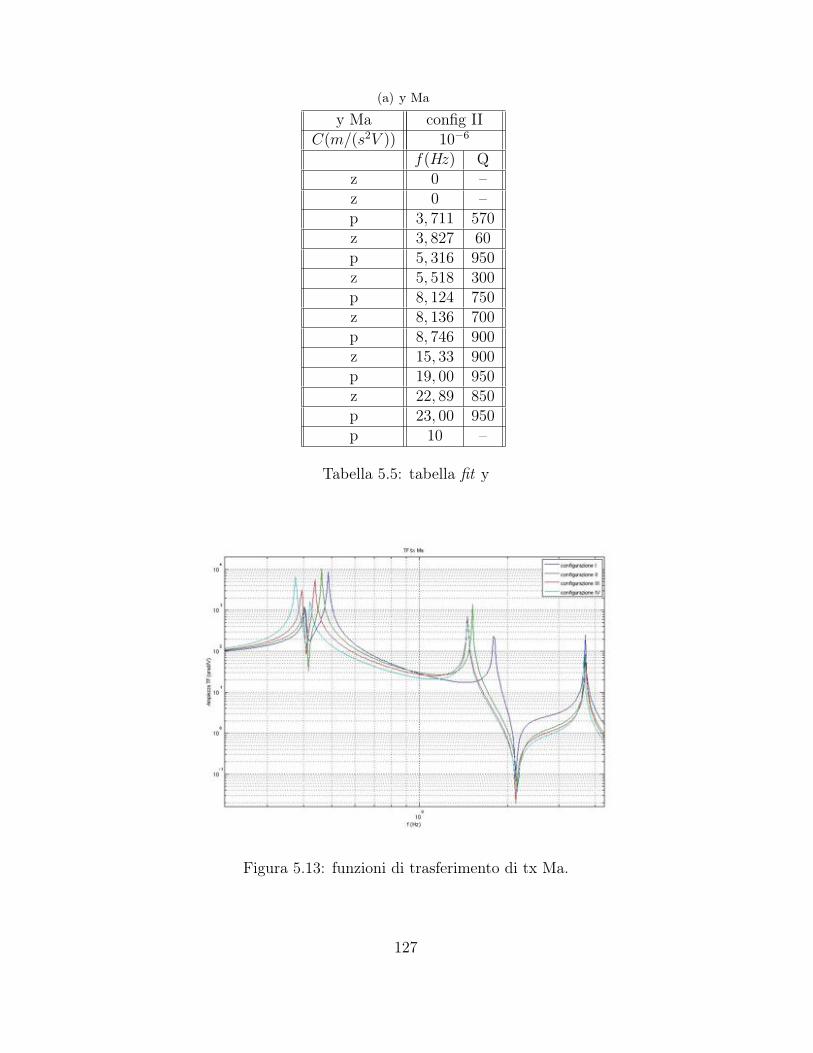
(a) y Ma
y Ma config IIC(m/(s2V )) 10#6
f(Hz) Qz 0 –z 0 –p 3, 711 570z 3, 827 60p 5, 316 950z 5, 518 300p 8, 124 750z 8, 136 700p 8, 746 900z 15, 33 900p 19, 00 950z 22, 89 850p 23, 00 950p 10 –
Tabella 5.5: tabella fit y
Figura 5.13: funzioni di trasferimento di tx Ma.
127
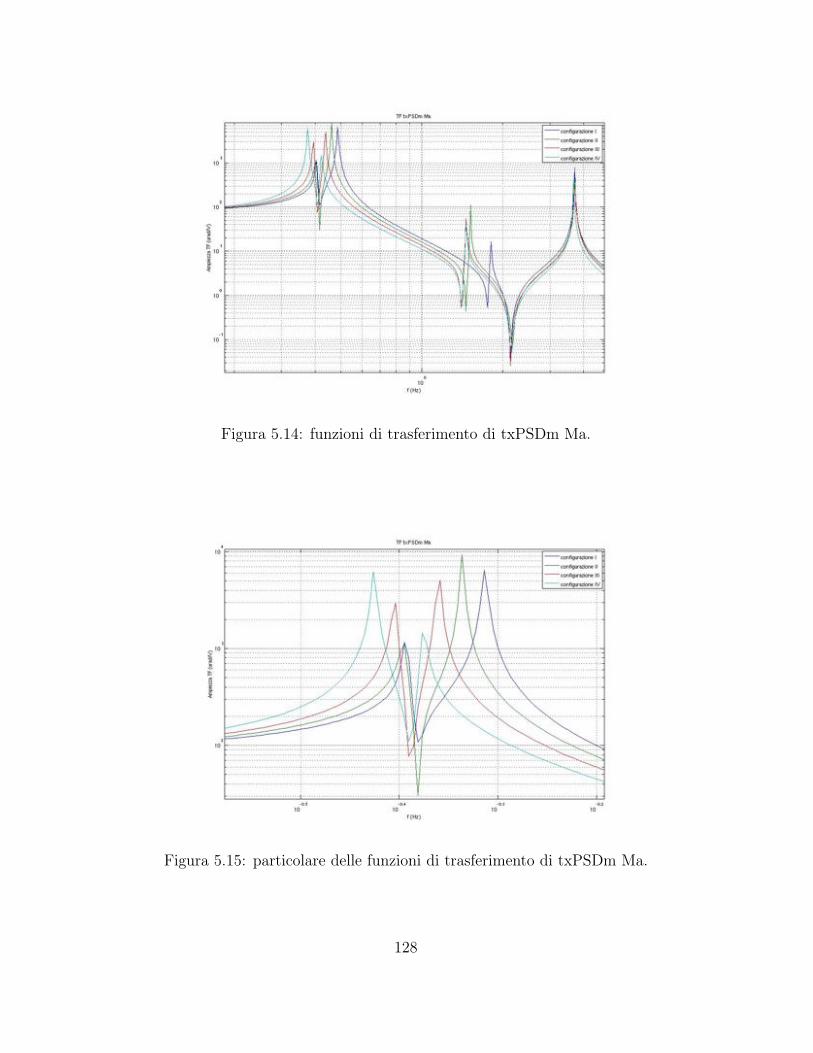
Figura 5.14: funzioni di trasferimento di txPSDm Ma.
Figura 5.15: particolare delle funzioni di trasferimento di txPSDm Ma.
128
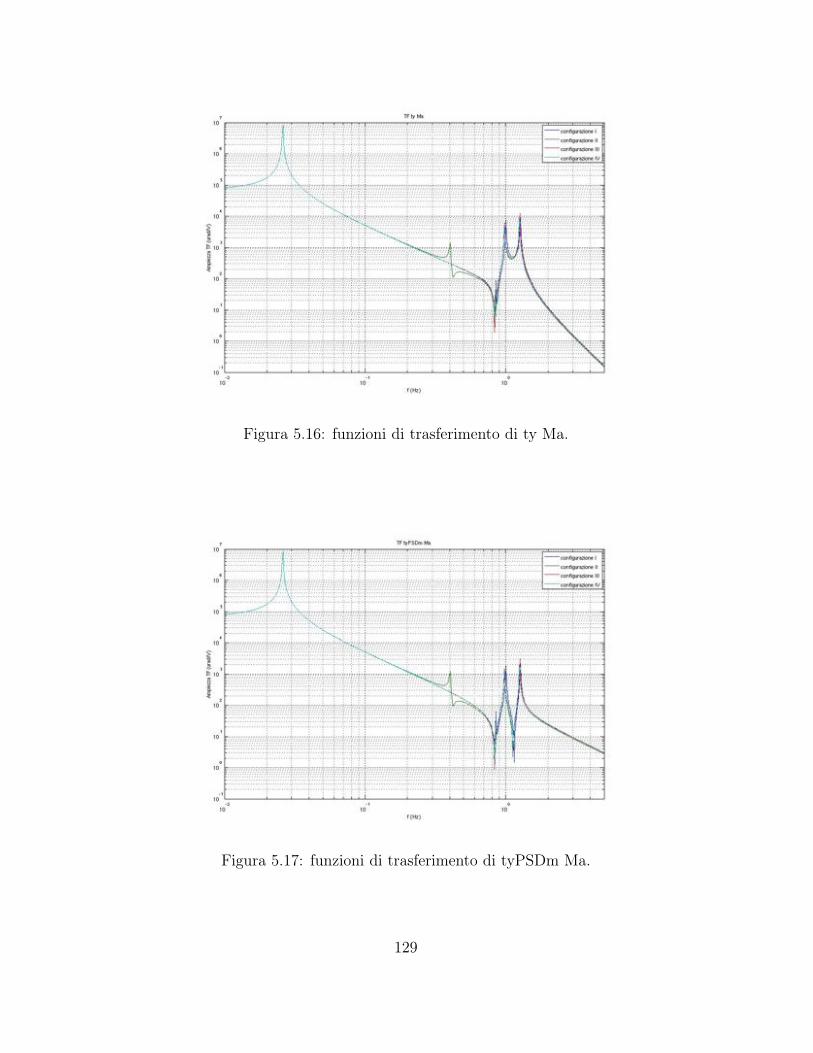
Figura 5.16: funzioni di trasferimento di ty Ma.
Figura 5.17: funzioni di trasferimento di tyPSDm Ma.
129
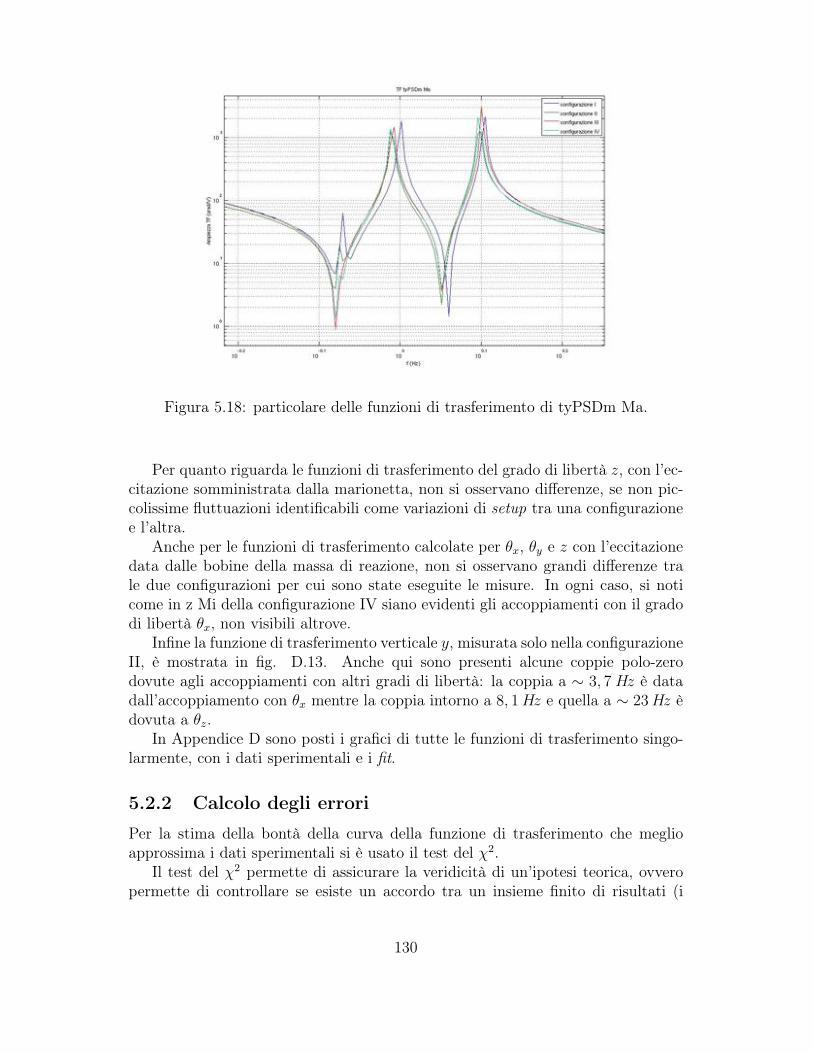
Figura 5.18: particolare delle funzioni di trasferimento di tyPSDm Ma.
Per quanto riguarda le funzioni di trasferimento del grado di libertà z, con l’ec-citazione somministrata dalla marionetta, non si osservano di!erenze, se non pic-colissime fluttuazioni identificabili come variazioni di setup tra una configurazionee l’altra.
Anche per le funzioni di trasferimento calcolate per /x, /y e z con l’eccitazionedata dalle bobine della massa di reazione, non si osservano grandi di!erenze trale due configurazioni per cui sono state eseguite le misure. In ogni caso, si noticome in z Mi della configurazione IV siano evidenti gli accoppiamenti con il gradodi libertà /x, non visibili altrove.
Infine la funzione di trasferimento verticale y, misurata solo nella configurazioneII, è mostrata in fig. D.13. Anche qui sono presenti alcune coppie polo-zerodovute agli accoppiamenti con altri gradi di libertà: la coppia a ) 3, 7 Hz è datadall’accoppiamento con /x mentre la coppia intorno a 8, 1 Hz e quella a ) 23 Hz èdovuta a /z.
In Appendice D sono posti i grafici di tutte le funzioni di trasferimento singo-larmente, con i dati sperimentali e i fit.
5.2.2 Calcolo degli erroriPer la stima della bontà della curva della funzione di trasferimento che meglioapprossima i dati sperimentali si è usato il test del 32.
Il test del 32 permette di assicurare la veridicità di un’ipotesi teorica, ovveropermette di controllare se esiste un accordo tra un insieme finito di risultati (i
130
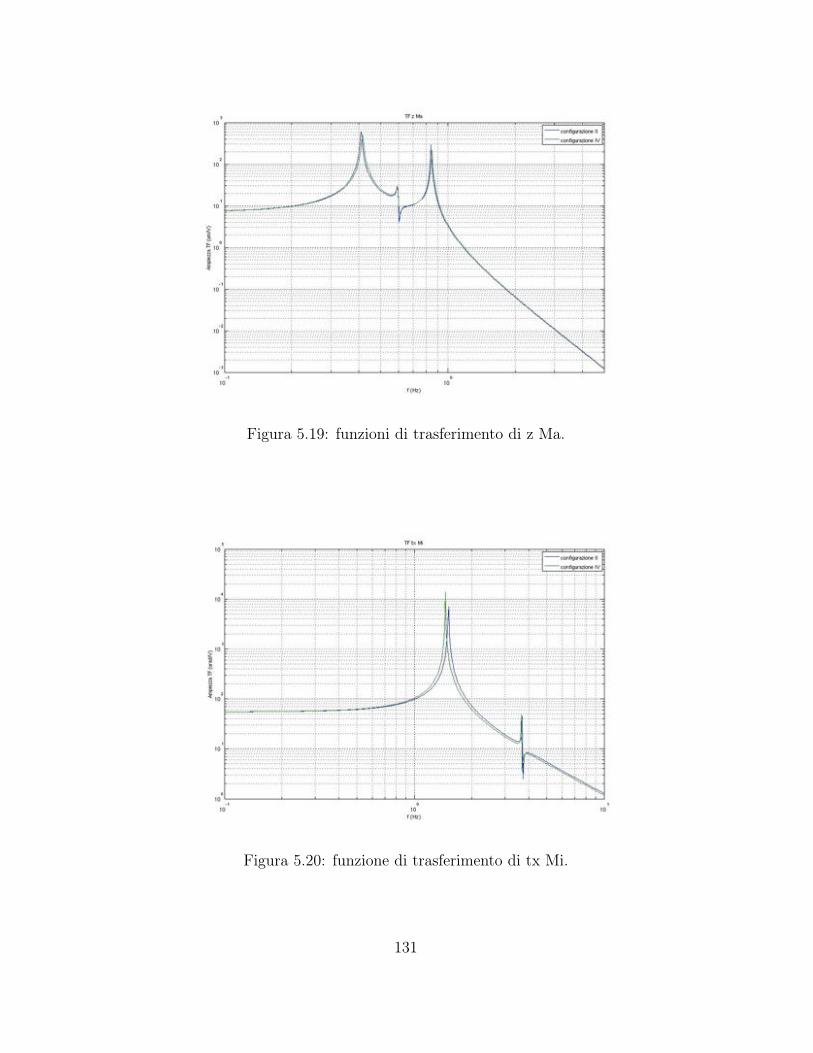
Figura 5.19: funzioni di trasferimento di z Ma.
Figura 5.20: funzione di trasferimento di tx Mi.
131
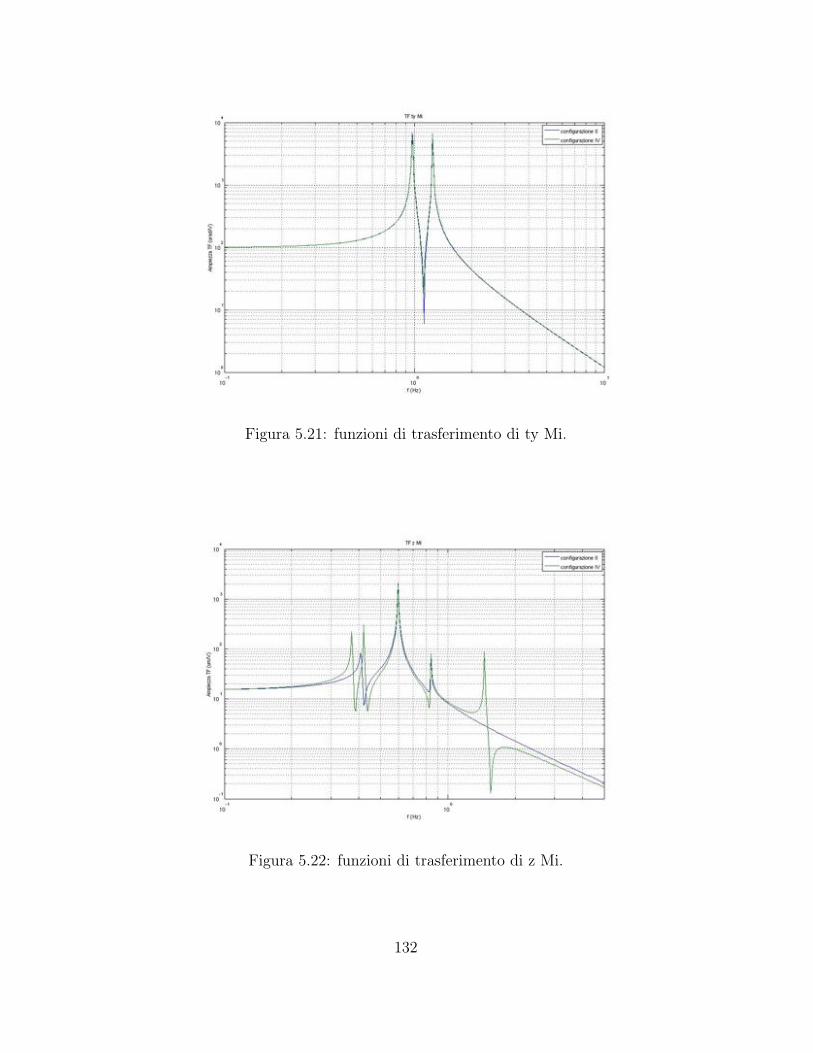
Figura 5.21: funzioni di trasferimento di ty Mi.
Figura 5.22: funzioni di trasferimento di z Mi.
132

punti sperimentali) e la loro previsione teorica (il loro valore aspettato, in sensoprobabilistico) [64]. In questo modo si stabiliscono i limiti entro cui devono esserecompresi i valori sperimentali per essere in accordo con la previsione teorica.
Poniamo di avere n variabili casuali e indipendenti yi, ciascuna appartenentead una stessa distribuzione normale con valore aspettato m e varianza 12. Lavariabile 32 è definita:
32 =n!
i=1
(yi "m)2
12(5.15)
ed ha valore aspettato pari al numero di gradi di libertà, ovvero il numero di puntisperimentali n, e varianza pari a 2n [65].
Per valutare il valore aspettato m e la varianza 12 dei punti sperimentali è pos-sibile utilizzare il metodo di massima verosomiglianza. Infatti con questo metodosi trovano i valori dei parametri che caratterizzano la funzione di distribuzione diuna grandezza fisica di cui è nota la forma, a partire dagli stessi n punti speri-mentali misurati, minimizzando la di!erenza tra i dati e l’andamento ipotizzatodella funzione di distribuzione. Per il valore aspettato e per la varianza si harispettivamente:
y =1
n
n!
i=1
yi "# m (5.16)
s2 =1
n" 1
n!
i=1
(yi " y)2 "# 12 (5.17)
Allora la variabile 32, se valutata con le stime1 dei parametri della distribuzione,assume una funzione di distribuzione compresa tra quella con n"1 gradi di libertàe quella con n " 1 " np gradi di libertà, dove np è il numero di parametri, usatiper le stime.
Nel caso del test del 32, si ha un trattamento leggermente diverso. Poniamo diavere n variabili xi a cui corrispondono altrettanti valori di un’altra variabile yi,misurata sperimentalmente: ogni yi appartiene ad una funzione di distribuzioneindipendente che avrà un suo valore aspettato ed una sua varianza2.
Queste due variabili saranno legate tra loro da una relazione del tipo y =f(x, Pj), dove Pj saranno gli np parametri che esprimono la dipendenza funzionalegenerale, stimabili grazie al metodo dei minimi quadrati [66].
Volendo valutare la bontà della dipendenza funzionale f(x, Pj), il nostro fit,possiamo avvalerci sempre di una variabile di tipo 32 dove al posto del valoreaspettato mi della i-esima misura nell’eq. 5.15 si deve porre il valore corrispondentestimato tramite il fit stesso f(xi, Pj) e al posto della varianza 12
i si deve metterel’errore sperimentale della i-esima misura, considerato presente solo sulla variabile
1Si distingua tra il “valore vero” di una variabile, il valore aspettato in senso probabilistico, ela sua “stima”, calcolata statisticamente.
2Dato che abbiamo a che fare con dati sperimentali è sensato pensare che generalmente perogni dato la funzione di distribuzione corrisponda a quella gaussiana.
133

yi:
X2 =n!
i=1
(yi " f(xi, Pj))2
s2i
(5.18)
Il valore aspettato di questa variabile X2 è ancora coincidente con il numero ndi gradi di libertà, per cui si può definire la corrispondete variabile ridotta X2
rid:
X2rid =
1
n
n!
i=1
(yi " f(xi, Pj))2
s2i
(5.19)
che ha valore aspettato pari a 1.Nel nostro caso abbiamo utilizzato per il test del 32 l’eq. 5.19. Per valutare gli
errori s2i abbiamo utilizzato l’eq. 5.17, sfruttando il fatto che abbiamo a disposi-
zione un numero nave di acquisizioni per ogni misura e!ettuata, quindi nave valoridiversi dell’ampiezza della funzione di trasferimento per la stessa frequenza xi. Sinoti, inoltre, che questo errore, calcolato a partire dalle misure non mediate, vaapplicato ai dati yi invece mediati: per cui, si va diviso ulteriormente per la radicedi nave. In conclusione l’espressione utilizzata per la stima del 32 è:
X2rid =
1
n
n!
i=1
(yi " f(xi, Pj))2
(si/-
nave)2(5.20)
Una volta determinato il valore del X2rid per una misura di funzione di tra-
sferimento occorre stabilire se tale valore è accettabile entro un certo livello 2 diconfidenza stabilito. Si ha che X2
rid è compreso con una probabilità 2 tra i valorilimite 32
1"#2 ,n
e 321+#
2 ,n, dipendenti dal numero di gradi di libertà n e dal livello di
confidenza imposto. Nel caso di un numero elevato di gradi di libertà, per stabilirei valori limite si può usare la relazione:
32!,n =
1
2(z! +
-2n" 1)2 (5.21)
dove z! è definito come:2 =
- z#
0fG(x)dx (5.22)
con fG la funzione di distribuzione gaussiana standard con valore aspettato 0 evarianza 1.
Imponendo un livello di confidenza 2 = 95% e un numero di punti sperimentalipari a n = 1638, si trova che il valore ottenuto dai dati sperimentali X2
rid deveessere compreso tra 0, 01813 < X2
rid < 0, 9994 per poter accettare i parametriottenuti dal fit.
Calcolato il valore del 32 concernente una misura di funzione di trasferimentodobbiamo stimare l’errore che si compie sui singoli parametri del fit. Per farlopossiamo utilizzare la relazione [65]:
32(Pj ± 1j) = X2rid + 1 (5.23)
134

Perciò facendo variare i parametri del fit uno alla volta fino ad aumentaredi un’unità il valore trovato X2
rid, si determina l’errore compiuto su quello stessoparametro.
Ora si consideri che sono state e!ettuate 25 misure di funzioni di trasferimentoper gradi di libertà diversi e in configurazioni diverse: per ognuna delle misurazionisono state eseguite molte medie, generalmente nave ) 30. Allora per limitare iltempo di computazione, abbiamo stimato gli errori solo per cinque delle misurecompiute, riportate nelle tabelle tab. 5.6.
5.3 Previsione teoricaA questo punto siamo interessati a confrontare i dati sperimentali delle funzioni ditrasferimento meccaniche con le curve teoriche al fine di operare una stima accuratadei parametri del sistema come ad esempio le masse e i momenti di inerzia dei corpi,oppure le lunghezze e gli spessori dei fili di sospensione.
Per calcolare le funzioni di trasferimento teoriche utilizziamo il metodo dellematrici di trasferimento da punto a punto. La funzione di trasferimento mec-canica di un sistema è identificata tramite una matrice T(,), detta matrice ditrasferimento, funzione della pulsazione ,:
4Xout(,) = T(,) 4Xin(,) "#1
4xout(,)4Fout(,)
2
= T(,)
14xin(,)4Fin(,)
2
(5.24)
dove 4Xin e 4Xout sono vettori aventi un numero di componenti n pari al numerodi gradi di libertà del sistema che rappresentano rispettivamente le trasformate diFourier delle grandezze in ingresso e in uscita.
Preso un generico sistema fisico complesso si ha che:
• i vettori delle grandezze in ingresso e in uscita possono essere descritti conle coordinate della posizione 4x e con le forze applicate 4F ai corpi che com-pongono il sistema.
• è utile suddividerlo in più sottosistemi semplici e facilmente schematizzabili,tutti collegati tra loro [67]. In particolare questa scomposizione è validanel caso limite delle piccole oscillazioni, in cui ogni collegamento tra i varisottosistemi si comporta linearmente. Nel caso di sistemi come quello delpayload i sottosistemi che lo compongono sono di tipo massivo o di tipoelastico.
Possiamo allora scrivere la matrice di trasferimento come:
T =
1A(,) B(,)C(,) D(,)
2
(5.25)
135
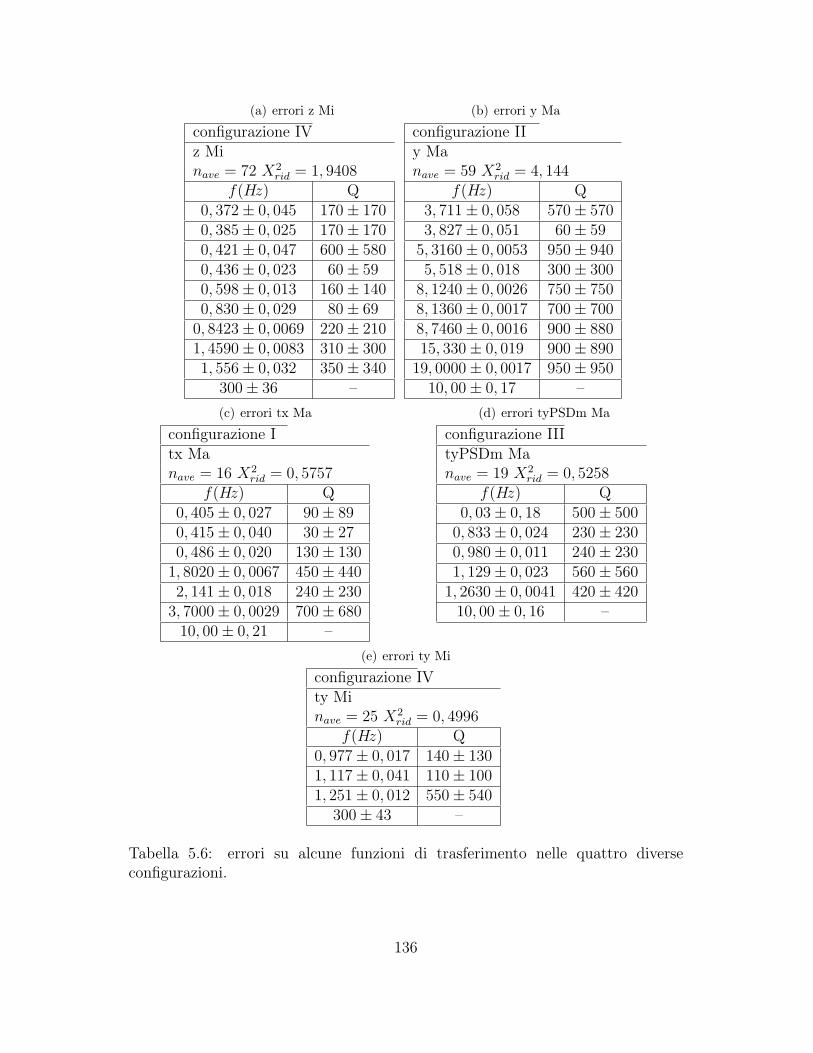
(a) errori z Mi
configurazione IVz Minave = 72 X2
rid = 1, 9408f(Hz) Q
0, 372± 0, 045 170± 1700, 385± 0, 025 170± 1700, 421± 0, 047 600± 5800, 436± 0, 023 60± 590, 598± 0, 013 160± 1400, 830± 0, 029 80± 69
0, 8423± 0, 0069 220± 2101, 4590± 0, 0083 310± 3001, 556± 0, 032 350± 340
300± 36 –
(b) errori y Ma
configurazione IIy Manave = 59 X2
rid = 4, 144f(Hz) Q
3, 711± 0, 058 570± 5703, 827± 0, 051 60± 59
5, 3160± 0, 0053 950± 9405, 518± 0, 018 300± 300
8, 1240± 0, 0026 750± 7508, 1360± 0, 0017 700± 7008, 7460± 0, 0016 900± 88015, 330± 0, 019 900± 890
19, 0000± 0, 0017 950± 95010, 00± 0, 17 –
(c) errori tx Ma
configurazione Itx Manave = 16 X2
rid = 0, 5757f(Hz) Q
0, 405± 0, 027 90± 890, 415± 0, 040 30± 270, 486± 0, 020 130± 130
1, 8020± 0, 0067 450± 4402, 141± 0, 018 240± 230
3, 7000± 0, 0029 700± 68010, 00± 0, 21 –
(d) errori tyPSDm Ma
configurazione IIItyPSDm Manave = 19 X2
rid = 0, 5258f(Hz) Q
0, 03± 0, 18 500± 5000, 833± 0, 024 230± 2300, 980± 0, 011 240± 2301, 129± 0, 023 560± 560
1, 2630± 0, 0041 420± 42010, 00± 0, 16 –
(e) errori ty Mi
configurazione IVty Minave = 25 X2
rid = 0, 4996f(Hz) Q
0, 977± 0, 017 140± 1301, 117± 0, 041 110± 1001, 251± 0, 012 550± 540
300± 43 –
Tabella 5.6: errori su alcune funzioni di trasferimento nelle quattro diverseconfigurazioni.
136

dove A, B, C e D sono matrici quadrate di dimensione pari a n. Sfruttando larelazione per cui il prodotto tra la matrice T e la sua inversa è uguale alla matriceidentità I:
T#1 ·T = I (5.26)
è possibile trovare delle relazioni algebriche tra le sottomatrici che la costituiscono:
AtD"BtC = I AtB = BtA CtD = DtC (5.27)
dove l’apice t indica l’operazione di trasposizione della matrice.Grazie a queste relazioni del tutto generali, quindi valide anche nel caso in cui il
sistema sia scomponibile in più parti semplici, si trova l’espressione della funzionedi trasferimento nel caso in cui le forze in uscita sono nulle 4Fout = 0:
• quando abbiamo uno spostamento in ingresso:
4xout = (Dt)#14xin (5.28)
• quando abbiamo una forza in ingresso (come nelle nostre misure sperimen-tali):
4xout = A(C)#1 " (Ct)#1 4Fin (5.29)
Discutiamo ora i vari tipi di collegamento presenti tra i vari sottosistemi cheformano l’apparato in esame. Consideriamo due sistemi A e B, rispettivamentecon grandezze in ingresso e in uscita identificate dai vettori 4Xin e 4Xout e matricidi trasferimento TA e TB, ognuna di componenti A, B, C e D:
sistemi in serie: due sistemi sono collegati in serie tra loro se le grandezze in usci-ta del primo corrispondono con le grandezze in ingresso del secondo, ovvero4XoutB $ 4XinA . Quindi i due sistemi hanno un ingresso e un’uscita complessiviunici; la risultante è data dal prodotto delle due singole impedenze:
Tser = TB ·TA (5.30)
Dato che si tratta di un prodotto tra matrici, è importante l’ordine con ilquale tale prodotto è eseguito: si noti che si deve moltiplicare la matrice ditrasferimento del sistema di uscita per la matrice del sistema di ingresso.
sistemi in derivazione: due sistemi si dicono collegati in derivazione se le gran-dezze in uscita del primo sono nulle 4XoutA (la sua uscita è libera) e se le suegrandezze in ingresso corrispondono con le grandezze in ingresso o in uscitadel secondo. Si distinguono i due casi:
1. 4XinA $ 4XinB , allora la matrice di trasferimento complessiva è:
Tder = TA ·1
1 0D#1
B ·CB 1
2
(5.31)
137

2. 4XinA $ 4XoutB , allora la matrice di trasferimento complessiva è:
Tder =
11 0
D#1B ·CB 1
2
·TA (5.32)
sistemi in parallelo: due sistemi sono in parallelo se hanno le stesse grandezze iningresso e in uscita, 4XinA $ 4XinB e 4XoutA $ 4XoutB ; l’impedenza complessivadel sistema, nel caso in cui le impedenze dei sistemi iniziali hanno gli stessielementi diagonali AA $ AB e DA $ DB sarà:
Tpar =
1A BA · (BA + BB)#1 ·BB
CA + CB D
2
(5.33)
Questi tipi diversi di collegamenti uniscono i sottosistemi tra loro, sottosiste-mi che nel caso del payload sono generalmente dipendenti dalla massa appesa odall’elasticità delle sospensioni.
5.3.1 Sistemi ad una dimensioneImmaginiamo di avere un sistema costituito da un corpo di massa m sostenuta daun filo con un coe"ciente elastico k: si avranno due sottosistemi, uno datao dallamassa e uno dato dal filo, collegati in serie tra loro. Se il sistema globalmente simuove in una sola direzione e se il corpo è puntiforme, sarà descritto in modo com-pleto con una sola variabile x e di conseguenza anche la matrice di trasferimentoavrà una sola componente.
Per quanto riguarda il sottosistema della massa m si ha che:
• lo spostamento di tutti i suoi punti è descritto con la stessa coordinata, quindilo spostamento in uscita coincide con quello in ingresso;
• le forze applicate alle sue estremità sono date dall’equazione di Newton,legate alla pulsazione del sistema ,, quindi dipendente dalla frequenza chesi considera.
Quindi in formule si ricava la matrice di trasferimento:
xout = xin
Fin " Fout = "m,2xin"# Tm =
11 0
m,2 1
2
(5.34)
Invece per quanto riguarda il sottosistema del filo, approssimabile come unamolla ideale, si ha che:
• le forze applicate alle sue estremità sono uguali in modulo;
• lo spostamento è legato alle forze, tramite la costante elastica.
138

In formule la matrice di trasferimento si esprime:
Fout = Fin
Fout = "k(xout " xin)"# Tk =
11 "1/k0 1
2
(5.35)
Mettendo insieme i due sottosistemi si ha la matrice complessiva:
T1#dim =
11 "1/k
m,2 1"m,2/k
2
(5.36)
Si noti che la possibilità di rappresentare il sistema appena descritto comecostituito dal solo sottosistema massivo o dal solo sottosistema elastico dipende inlarga parte dalla banda delle frequenze dello spettro a cui si sta lavorando e daglieventuali altri sistemi a cui è connesso.
5.3.2 Sistemi a due dimensioniIl payload non può essere trattato come un sistema ad una sola dimensione: infattile oscillazioni che esegue avvengono in due dimensioni e possono essere compiuta-mente descritte con una traslazione x ed uno spostamento angolare 2. In modoanalogo, oltre alla forza F si avrà il momento della forza M . Allora i vettori dellegrandezze in ingresso 4Xin e di quelle in uscita 4Xout avranno quattro componentix, 2, F e M .
Come prima, è possibile scomporre il payload in una serie di masse mi sospesetramite fili, ognuno con un suo coe"ciente elastico longitudinale kxi e un coe"-ciente elastico torsionale k!i ; ma questa volta, dato che i corpi appesi non sonopuntiformi, bisogna tenere in conto anche della posizione dei punti di attacco dei filie della posizione dei punti di applicazione delle forze, che alterano lo spostamentodei punti del corpo massivo.
Per quanto riguarda il sottosistema dato dalla generica massa mi, quando leposizioni di ingresso e di uscita coincidono con il centro di massa del corpo stesso,si ha che le equazioni del moto sono:
xin = xout
2in = 2out
Fin " Fout = "m,2xin
Min "Mout = "I,22in
"# Tm,I =
'
((()
1 0 0 00 1 0 0
m,2 0 1 00 I,2 0 1
*
+++, (5.37)
dove I è il momento d’inerzia del corpo in considerazione.Se le posizioni di ingresso e di uscita distano dal centro di massa di una quan-
tità 4a, eventualmente anche di tre diverse componenti, si deve considerare che lospostamento in uscita dipende da 4a stesso e che la forza in ingresso contribuisce almomento. Nel nostro caso a due dimensioni ci interessa la componente di 4a lungo
139

l’asse x ovvero ax:
xout = xin + ax2in
2out = 2in
Fout = Fin
Mout = Min " axT2in " axFin
"# Ta =
'
((()
1 ax 0 00 1 0 00 0 1 00 "axT "ax 1
*
+++, (5.38)
dove T è la componente verticale della forza applicata in ingresso. Questa matriceTa va moltiplicata a destra di una generica matrice di trasferimento del sistemase la posizione dell’ingresso non coincide con quella del baricentro, a sinistra se èla posizione dell’uscita a non coincidere.
Per quanto riguarda il sottosistema costituito dal filo di sospensione, c’è daconsiderare che quando una sua estremità ruota, a causa della rigidità flessionale,l’altra estremità subisce l’azione di una forza trasversale. Si hanno accoppiamentitra il grado di libertà traslazionale e quello torsionale che complicano notevolmentele equazioni del moto. In ogni caso si riesce a trovare una soluzione analitica ea ricavare la corrispondente matrice di trasferimento. Riportiamo qui solamentela sua forma approssimata [67], valida se il filo ha massa trascurabile o se stiamolavorando a frequenze molto minori di una frequenza caratteristica fc:
fc =T
2"-
#SEJ(5.39)
dove T è sempre la componente verticale della forza applicata in ingresso; # e Ssono rispettivamente la densità e la sezione del filo, di lunghezza l; E e J sono ilmodulo di Young e il momento d’inerzia della sezione del filo.
Ricordando la definizione della posizione del punto di piegamento (eq. 4.2,. =
0EJ/T ), si può scrivere la matrice di trasferimento:
Tl =
'
((()
1 . sinh( l$) (. sinh( l
$)" l)/T (1" cosh( l$))/T
0 c (cosh( l$)" 1)/T " sinh( l
$)/.0 0 1 00 ".T sinh( l
$) cosh( l$)
*
+++, (5.40)
La matrice approssimata di eq. 5.40, molto più semplice dal punto di vista dellatrattazione analitica della matrice nella forma estesa, presenta un problema nelcalcolo numerico: infatti nel caso ci siano fili molto sottili e tesi, si può verificare lasottrazione di alcuni termini praticamente uguali che portano alla divergenza delleespressioni. Per eliminare questa divergenza è possibile aggiungere in parallelo aifili di sospensione degli ulteriori fili (virtuali), detti di centraggio ed espressi dauna matrice di trasferimento del tipo:
Tk =
'
((()
1 0 "1/kx 00 1 0 "1/k!
0 0 1 00 0 0 1
*
+++, (5.41)
140

I fili di centraggio reagiscono in modo indipendente sui due gradi di libertà:quindi la forza in uscita dipende solamente dalle traslazioni alle estremità dei fi-li, mentre il momento dipende solo dalle rotazioni. Un vincolo elastico fatto inquesto modo è rappresentato piuttosto bene dai cavi di alimentazione e di colle-gamento degli apparati elettronici, per cui si può trascurare la costante kx. Alloral’introduzione dell’eq. 5.41 risulta anche ragionevole da un punto di vista realistico.
Dall’eq. 5.33 si ricava l’espressione del parallelo tra i fili di sospensione e i filidi centraggio:
Tl,k =
'
((()
1 2.(1 + !/2) (2.(1 + !/2)" l)/T "./k!
0 1 + ! ./k! "1/k!
0 0 1 00 "2.(1 + !/2) "2.(1 + !/2) 1 + !
*
+++, (5.42)
in cui si è tenuto conto che tanh(l/.) ' 1. Il parametro che compare è dato dallarelazione:
! =.T
k!(5.43)
Si noti che in questo modo la trattazione della sospensione del payload è bendescritta. Se il coe"ciente elastico torsionale k! dei fili di alimentazione è abba-stanza piccolo, solo l’angolo di rotazione finale 2out dipenderà da questo, potendotrascurare gli altri termini. Quindi le altre componenti della matrice di eq. 5.42tenderanno a coincidere con i termini della matrice di eq. 5.40. Ne consegue chei fili di centraggio comportano degli e!etti dinamici trascurabili, ma introduco-no un termine di accoppiamento angolare su"ciente ad eliminare le divergenzenumeriche.
Infine se la sospensione delle masse avviene tramite più fili, ad esempio due oquattro, come nel caso della massa di reazione e dello specchio, bisogna aggiungereun momento di richiamo aggiuntivo, dato dall’allungamento dei fili stessi. Lacostante elastica torsionale k! dovrà essere riscritta come:
k! =kxs2
4(5.44)
dove s è la distanza tra i piani di azione dei fili. Quindi, a parte questa correzione,i fili si comportano come un singolo filo fissato al baricentro del corpo.
5.3.3 Le funzioni di trasferimento teoricheDopo aver descritto le matrici di trasferimento che costituiscono in generale un si-stema fisico come il payload, possiamo calcolare le funzioni di trasferimento aspet-tate. Per farlo è stato sviluppato un apposito programma in Matlab presso la
141

collaborazione Virgo che è stato per la prima volta utilizzato per studiare un pay-load. L’esperimento di caratterizzazione del payload è servita anche a controllarela consistenza del software.
In questo programma è possibile selezionare il grado di libertà di cui vogliamoconoscere la funzione di trasferimento in una certa banda di frequenze: si tengapresente che è necessario calcolare alcuni sottoinsiemi dei gradi di libertà insieme,in quanto strettamente accoppiati, come nel caso di /x e z. Scelto il grado, sielencano tutti i parametri del sistema:
• le masse dei tre corpi che costituiscono il payload misurate direttamente odedotte dallo studio di progettazione meccanica [68];
• i momenti di inerzia dei tre corpi nei tre assi cartesiani, x, y e z, calcolati incasi semplici o dedotti dalla progettazione nei casi più complessi [68];
• il materiale con cui sono fatti i fili che sostengono i tre corpi; si distingue trafili di:
– Maraging (modulo di Young E = 1, 89 · 1011N/m2, densità # = 8 ·103Kg/m3);
– acciaio C85 (E = 2, 0 · 1011N/m2, # = 7, 8 · 103Kg/m3);– silice fusa (E = 7, 27 · 1010N/m2, # = 2 · 103Kg/m3);
• le lunghezze dei fili, misurati in fase di produzione dei componenti del pay-load ;
• lo spessore dei fili;
• le coordinate dei punti di attacco dei fili di sospensione rispetto al centrodi massa di ciascuna massa sospesa (stacchi). Si deve distinguere tra glistacchi delle estremità superiori (riferiti come sux, suy, suz) con quelli delleestremità inferiori dei fili (riferiti come sdx, sdy, sdz)3.
Le ultime quattro grandezze elencate devono essere specificate per ognuno deifili; dato che ci sono quattro fili che sostengono lo specchio, quattro fili per la massadi reazione e uno solo per la marionetta, ci saranno in totale nove valori diversi.
Successivamente si calcolano le costanti elastiche specifiche del sistema e lematrici di trasferimento, considerando le tipologie presentate nella sez. 5.3.2. Notele matrici di trasferimento dei singoli sottosistemi si possono comporre tra loro pertrovare la matrice globale e si ricavano così le funzioni di trasferimento per il gradodi libertà selezionato dalle eq. 5.28 e 5.29.
3Il filo della marionetta possiede solo gli stacchi inferiori: dato che quelli superiori sonoconnessi al suolo, non danno contributo.
142
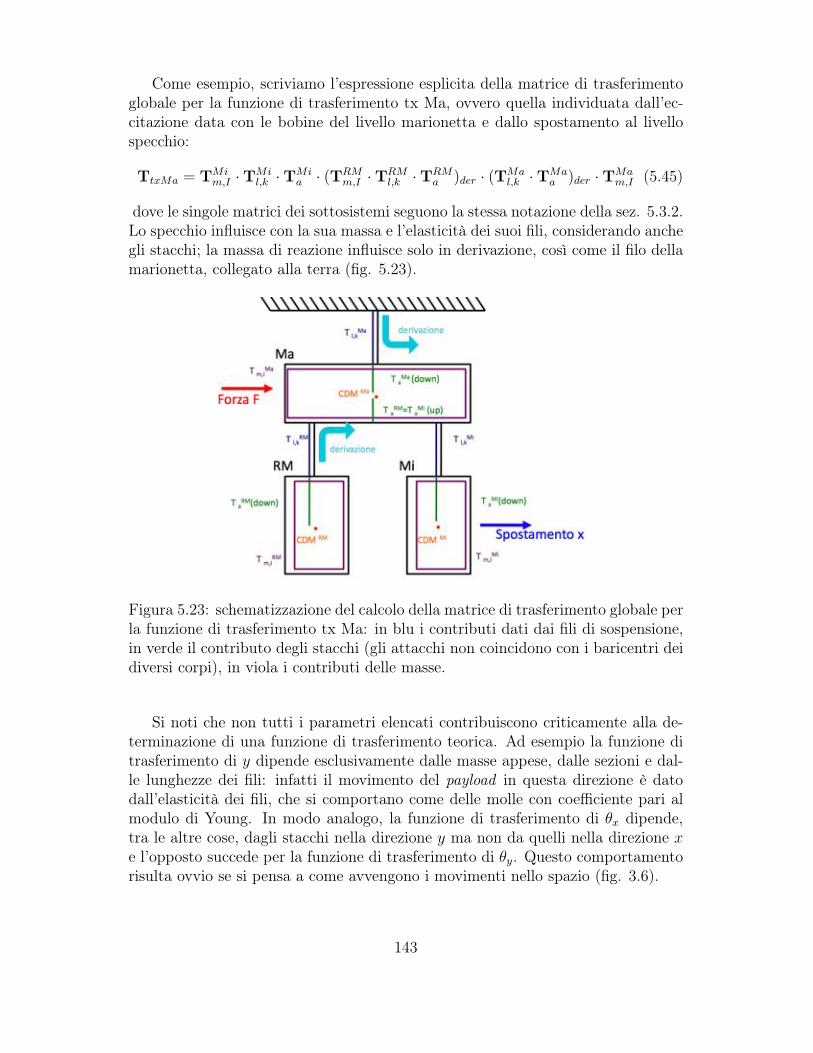
Come esempio, scriviamo l’espressione esplicita della matrice di trasferimentoglobale per la funzione di trasferimento tx Ma, ovvero quella individuata dall’ec-citazione data con le bobine del livello marionetta e dallo spostamento al livellospecchio:
TtxMa = TMim,I ·TMi
l,k ·TMia · (TRM
m,I ·TRMl,k ·TRM
a )der · (TMal,k ·TMa
a )der ·TMam,I (5.45)
dove le singole matrici dei sottosistemi seguono la stessa notazione della sez. 5.3.2.Lo specchio influisce con la sua massa e l’elasticità dei suoi fili, considerando anchegli stacchi; la massa di reazione influisce solo in derivazione, così come il filo dellamarionetta, collegato alla terra (fig. 5.23).
Figura 5.23: schematizzazione del calcolo della matrice di trasferimento globale perla funzione di trasferimento tx Ma: in blu i contributi dati dai fili di sospensione,in verde il contributo degli stacchi (gli attacchi non coincidono con i baricentri deidiversi corpi), in viola i contributi delle masse.
Si noti che non tutti i parametri elencati contribuiscono criticamente alla de-terminazione di una funzione di trasferimento teorica. Ad esempio la funzione ditrasferimento di y dipende esclusivamente dalle masse appese, dalle sezioni e dal-le lunghezze dei fili: infatti il movimento del payload in questa direzione è datodall’elasticità dei fili, che si comportano come delle molle con coe"ciente pari almodulo di Young. In modo analogo, la funzione di trasferimento di /x dipende,tra le altre cose, dagli stacchi nella direzione y ma non da quelli nella direzione xe l’opposto succede per la funzione di trasferimento di /y. Questo comportamentorisulta ovvio se si pensa a come avvengono i movimenti nello spazio (fig. 3.6).
143

5.3.4 Confronto con le misureLe funzioni di trasferimento teoriche ricavate in questo modo si possono graficaree confrontare con quelle misurate sperimentalmente. Variando i parametri delsistema, cambiano le matrici di trasferimento e quindi la funzione di trasferimentoaspettata per un certo grado di libertà selezionato.
Allora è possibile variare i parametri fino a far coincidere il più possibile le duefunzioni di trasferimento tra loro: come stimatore della bontà dell’accordo tra lemisure e gli andamenti teorici per un grado di libertà fissato, è stato consideratolo scarto # definito come:
# =
6778 1
n
n!
i=1
1fmis
i " f teoi
fmisi
22
(5.46)
dove n è il numero di poli e zeri doppi della funzione di trasferimento, fmisi
è la frequenza dell’i-esimo polo o zero della funzione di trasferimento misuratasperimentalmente e f teo
i è la frequenza dell’i-esimo polo o zero della funzione ditrasferimento calcolata teoricamente. Per rendere questa quantità indipendentedalla frequenza del polo o dello zero che si considera, dividiamo ogni di!erenzafmis
i " f teoi per la frequenza misurata. Inoltre abbiamo elevato al quadrato per
evitare che i termini negativi producessero cancellazioni, riducendo lo stimatore #in modo fittizio.
Per l’ottimizzazione dei parametri delle quattro diverse configurazioni è statoscritto un programma in Matlab, che provvede alla minimizzazione dello stimatoreper le funzioni di trasferimento di ogni grado di libertà in modo indipendente. Inlinea generale si è proceduto nel seguente modo:
• per ogni grado di libertà si osserva quali parametri sono maggiormente criticirispetto alla posizione dei poli e degli zeri della funzione di trasferimento. Aquesto scopo si fa una simulazione basata sui i valori iniziali dei parametri,detti parametri seme. Questi parametri seme sono stati misurati direttamen-te in fase di montaggio del payload oppure stimati dai disegni di progetta-zione (sez. 5.3.3). Gli errori sui parametri seme dipendono dal metodo concui sono stati individuati: i parametri misurati direttamente hanno l’erroreconnesso allo strumento utilizzato, mentre per i parametri stimati dai disegnisi è deciso di attribuire un errore relativo del 10%.
• si seleziona una particolare configurazione meccanica sperimentale del pay-load. Le serie di misure delle funzioni di trasferimento non sono tutte equiva-lenti: infatti bisogna distinguere tra le configurazioni in cui si possiedono lemisure per tutti i gradi di libertà (configurazioni II e IV), da quelle in cui sihanno le misure solo per /x e /y (configurazioni I e III); nel secondo caso nonè stato possibile ottimizzare compiutamente i valori dei parametri a causadell’assenza di informazioni su z. In ogni caso, si tenga presente che a causadell’accoppiamento con /x, tale assenza di informazioni è solo parziale.
144
• si prepara l’estrazione casuale dei parametri; fissata la configurazione, pos-siamo far variare i parametri estraendoli casualmente con una distribuzionegaussiana. Ogni parametro è estratto individualmente, con una distribuzionecentrata sul suo valore seme e una deviazione standard pari all’errore com-piuto nella stima del valore seme stesso. Per questioni di tempo di calcolosi è scelto di ottenere la minimizzazione degli stimatori # con un’estrazionecasuale: un primo tentativo è stato quello di provare tutte le combinazionipossibili dei valori dei parametri, facendoli variare all’interno di un interval-lo con un passo regolare, legato ad una frazione dell’errore del parametrostesso. Purtroppo abbiamo visto che tale operazione avrebbe richiesto untempo eccessivamente lungo e quindi si è optato per l’estrazione casuale. Ilnumero di estrazioni da compiere è stato deciso arbitrariamente, ma rispondead esigenze di tempo di calcolo e di accuratezza desiderata: è stato fissato a20000.
• utilizzando il programma scritto in Matlab è possibile calcolare le funzionidi trasferimento di tutti i gradi di libertà nello stesso momento, in mododa considerare anche gli accoppiamenti eventuali. Ma, dato che il sistemameccanico è stato progettato e messo a punto in modo da ridurre gli ac-coppiamenti tra le diverse grandezze (sez. 4.1.3), fatta eccezione per z e/x, possiamo calcolare le funzioni di trasferimento una alla volta. Questo cipermette di semplificare le procedure.Distinguiamo i casi relativi alle varie configurazioni:
– per le configurazioni II e IV si possiede la misura della funzione di trasfe-rimento di y. Anche se la misura è stata eseguita solo per la configura-zione II, i dati possono essere utilizzati anche nell’altra configurazione.Infatti si ricorda che i movimenti nella direzione y dipendono solo dallemasse in gioco e dalle lunghezze e dagli spessori dei fili4, uguali nel casodelle due configurazioni.Allora, si può minimizzare lo stimatore #y, della funzione di trasferi-mento di y ed utilizzare in seguito i valori ottimizzati dei parametricosì ottenuti anche per le altre funzioni teoriche. Nell’ordine si procedeall’ottimizzazione dei restanti parametri dei gradi di libertà /x e z, percui sono stati definiti due stimatori indipendenti #.x e #z, da mini-mizzare entrambi contemporaneamente, ed infine all’ottimizzazione deiparametri di /y.
– per le configurazioni I e III non si possiede la misura della funzione ditrasferimento di y, in quanto la configurazione I di!erisce dalle altre per
4In realtà tale funzione di trasferimento dipende anche dal materiale con cui sono fatti i filidi sospensione (acciaio, maraging o silice fusa), in quanto varia il valore del modulo di Younge la densità del materiale. Nella nostra simulazione, però, abbiamo considerato i parametricaratteristici del materiale dei fili come delle costanti e li abbiamo fissati.
145
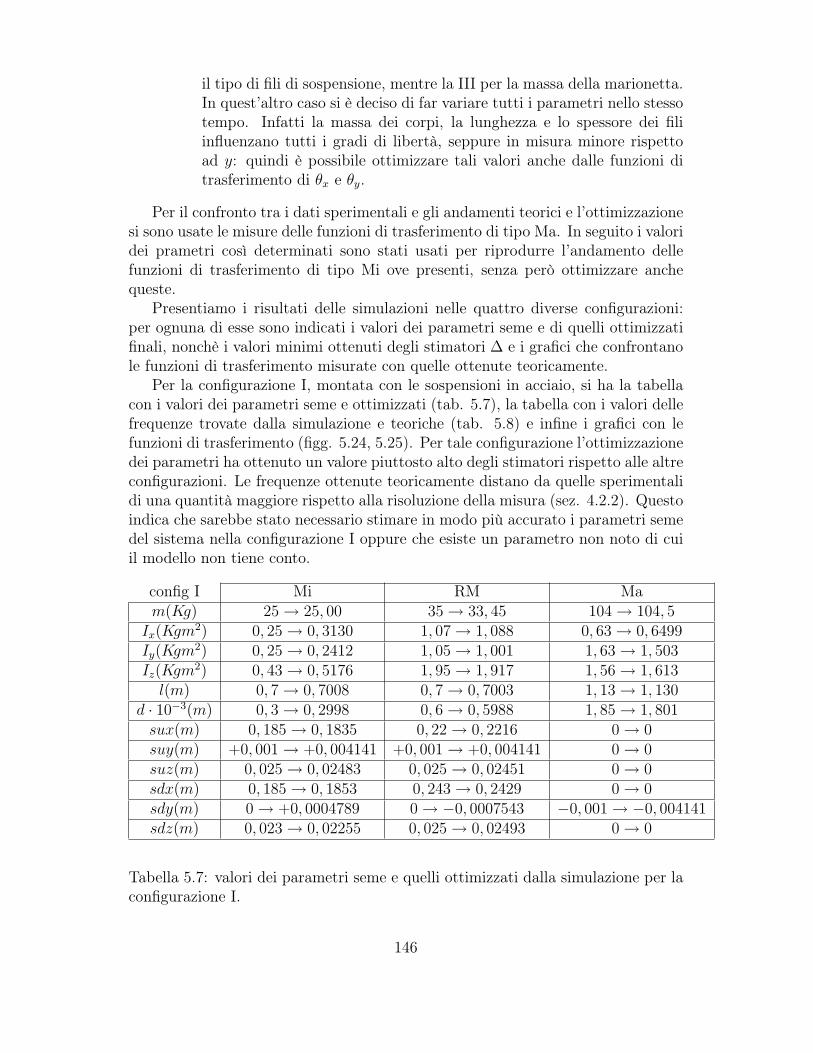
il tipo di fili di sospensione, mentre la III per la massa della marionetta.In quest’altro caso si è deciso di far variare tutti i parametri nello stessotempo. Infatti la massa dei corpi, la lunghezza e lo spessore dei filiinfluenzano tutti i gradi di libertà, seppure in misura minore rispettoad y: quindi è possibile ottimizzare tali valori anche dalle funzioni ditrasferimento di /x e /y.
Per il confronto tra i dati sperimentali e gli andamenti teorici e l’ottimizzazionesi sono usate le misure delle funzioni di trasferimento di tipo Ma. In seguito i valoridei prametri così determinati sono stati usati per riprodurre l’andamento dellefunzioni di trasferimento di tipo Mi ove presenti, senza però ottimizzare anchequeste.
Presentiamo i risultati delle simulazioni nelle quattro diverse configurazioni:per ognuna di esse sono indicati i valori dei parametri seme e di quelli ottimizzatifinali, nonchè i valori minimi ottenuti degli stimatori # e i grafici che confrontanole funzioni di trasferimento misurate con quelle ottenute teoricamente.
Per la configurazione I, montata con le sospensioni in acciaio, si ha la tabellacon i valori dei parametri seme e ottimizzati (tab. 5.7), la tabella con i valori dellefrequenze trovate dalla simulazione e teoriche (tab. 5.8) e infine i grafici con lefunzioni di trasferimento (figg. 5.24, 5.25). Per tale configurazione l’ottimizzazionedei parametri ha ottenuto un valore piuttosto alto degli stimatori rispetto alle altreconfigurazioni. Le frequenze ottenute teoricamente distano da quelle sperimentalidi una quantità maggiore rispetto alla risoluzione della misura (sez. 4.2.2). Questoindica che sarebbe stato necessario stimare in modo più accurato i parametri semedel sistema nella configurazione I oppure che esiste un parametro non noto di cuiil modello non tiene conto.
config I Mi RM Mam(Kg) 25# 25, 00 35# 33, 45 104# 104, 5
Ix(Kgm2) 0, 25# 0, 3130 1, 07# 1, 088 0, 63# 0, 6499Iy(Kgm2) 0, 25# 0, 2412 1, 05# 1, 001 1, 63# 1, 503Iz(Kgm2) 0, 43# 0, 5176 1, 95# 1, 917 1, 56# 1, 613
l(m) 0, 7# 0, 7008 0, 7# 0, 7003 1, 13# 1, 130d · 10#3(m) 0, 3# 0, 2998 0, 6# 0, 5988 1, 85# 1, 801
sux(m) 0, 185# 0, 1835 0, 22# 0, 2216 0# 0suy(m) +0, 001# +0, 004141 +0, 001# +0, 004141 0# 0suz(m) 0, 025# 0, 02483 0, 025# 0, 02451 0# 0sdx(m) 0, 185# 0, 1853 0, 243# 0, 2429 0# 0sdy(m) 0# +0, 0004789 0# "0, 0007543 "0, 001# "0, 004141sdz(m) 0, 023# 0, 02255 0, 025# 0, 02493 0# 0
Tabella 5.7: valori dei parametri seme e quelli ottimizzati dalla simulazione per laconfigurazione I.
146

Per la configurazione I, come massa della massa di reazione e della marionettasono state presi i valori trovati anche per le altre configurazioni: infatti solo lospecchio di!erisce tra questa configurazione e le altre, essendo più massiccio. Diconseguenza sono stati aumentati anche i momenti di inerzia seme introdotti nelprogramma di confronto teorico-sperimentale. I valori dei parametri seme deglistacchi sono leggermente diversi rispetto a quelli delle altre configurazioni, a cau-sa dei diversi attacchi verticali usati per l’aggancio dei fili di sospensione dellospecchio. Infatti nella configurazione I:
• gli attacchi verticali hanno uno spessore maggiore: quindi lo stacco inferiorenella direzione x, sdx, dello specchio è maggiore (0, 185 m anzichè 0, 180 m);
• gli attacchi verticali sono posti più vicini tra loro nella direzione z: quindisdz ha valore 0, 023 m anzichè 0, 025 m.
Infine, si deduce che la posizione e!ettiva del centro di massa della marionettanon coincide con quella di progettazione (forse a causa di un errore di lavorazione),a sua volta posta sul piano di attacco dei fili. In particolare si trova che il baricentroè situato ) 4 mm al di sotto del piano di attacco dei fili. In modo analogodeduciamo che il centro di massa dello specchio e della massa di reazione noncoincide esattamente con i piani di attacco dei fili di questi due corpi: ma in questocaso la discrepanza è molto minore (rispettivamente circa 0, 5 mm e 0, 8 mm) ecompatibile con delle piccole imprecisioni avvenute in fase di montaggio.
(a) frequenze della simulazione nella configurazioneI: TF Ma
tx Ma ty Mafmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz)
0, 405 0, 410 0, 026 0, 0260, 4148 0, 411 0, 8362 0, 8460, 4864 0, 485 1, 001 0, 9811, 802 1, 834 1, 270 1, 2832, 141 2, 131 – –3, 70 3, 725 – –
# = 0, 0102 # = 0, 0128
Tabella 5.8: tabella di confronto tra le frequenze misurate e quelle ottenute dallasimulazione nella configurazione I.
Per la configurazione II, in cui i fili di sospensione sono in silice fusa e gli attacchiverticali in acciaio, si ha la tabella con i valori dei parametri seme e ottimizzati(tab. 5.9), la tabella con i valori delle frequenze trovate dalla simulazione e teoriche(tab. 5.10) e infine i grafici con le funzioni di trasferimento (figg. 5.27, 5.28,5.29, 5.30, 5.31, 5.32, 5.33). Per questa configurazione si sono trovati dei valoridegli stimatori piuttosto bassi, fatta eccezione per la funzione di trasferimento
147
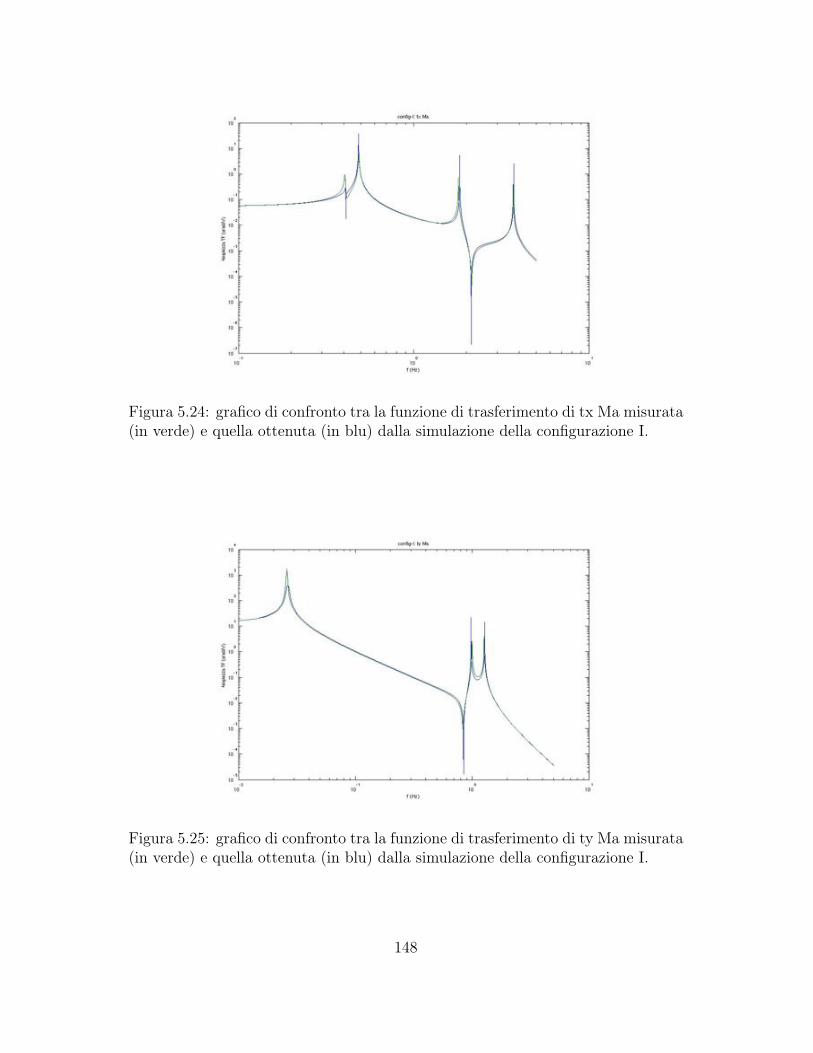
Figura 5.24: grafico di confronto tra la funzione di trasferimento di tx Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione I.
Figura 5.25: grafico di confronto tra la funzione di trasferimento di ty Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione I.
148
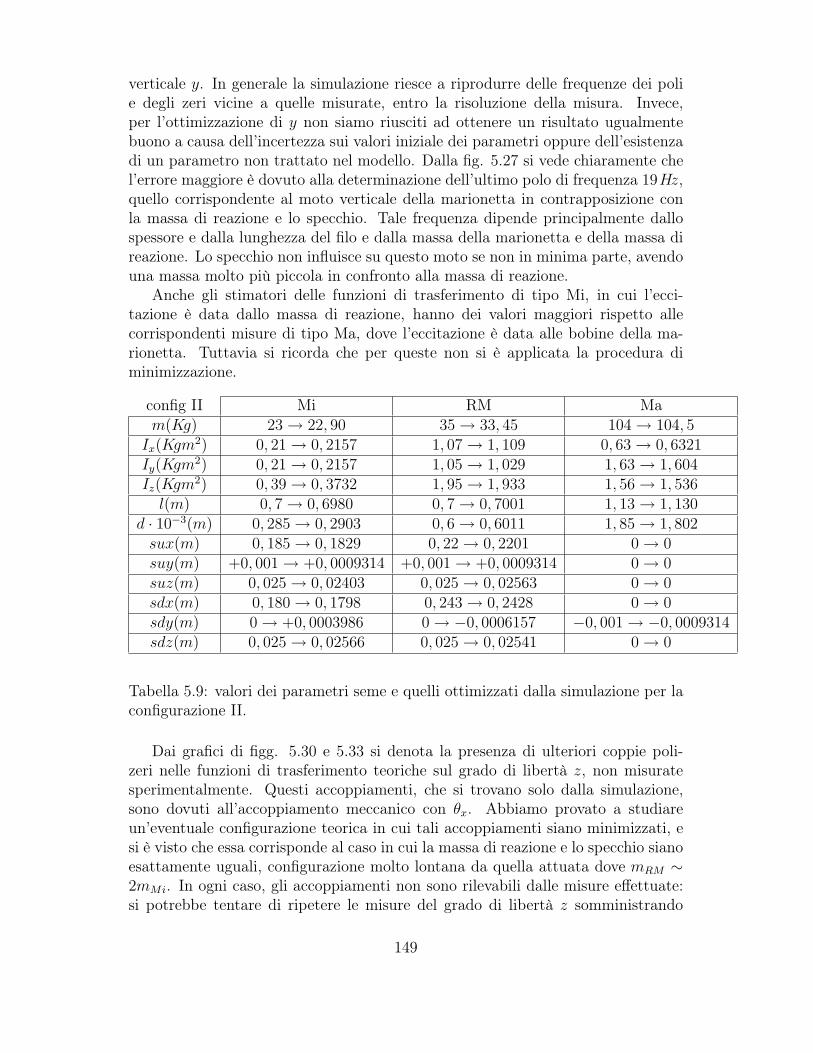
verticale y. In generale la simulazione riesce a riprodurre delle frequenze dei polie degli zeri vicine a quelle misurate, entro la risoluzione della misura. Invece,per l’ottimizzazione di y non siamo riusciti ad ottenere un risultato ugualmentebuono a causa dell’incertezza sui valori iniziale dei parametri oppure dell’esistenzadi un parametro non trattato nel modello. Dalla fig. 5.27 si vede chiaramente chel’errore maggiore è dovuto alla determinazione dell’ultimo polo di frequenza 19Hz,quello corrispondente al moto verticale della marionetta in contrapposizione conla massa di reazione e lo specchio. Tale frequenza dipende principalmente dallospessore e dalla lunghezza del filo e dalla massa della marionetta e della massa direazione. Lo specchio non influisce su questo moto se non in minima parte, avendouna massa molto più piccola in confronto alla massa di reazione.
Anche gli stimatori delle funzioni di trasferimento di tipo Mi, in cui l’ecci-tazione è data dallo massa di reazione, hanno dei valori maggiori rispetto allecorrispondenti misure di tipo Ma, dove l’eccitazione è data alle bobine della ma-rionetta. Tuttavia si ricorda che per queste non si è applicata la procedura diminimizzazione.
config II Mi RM Mam(Kg) 23# 22, 90 35# 33, 45 104# 104, 5
Ix(Kgm2) 0, 21# 0, 2157 1, 07# 1, 109 0, 63# 0, 6321Iy(Kgm2) 0, 21# 0, 2157 1, 05# 1, 029 1, 63# 1, 604Iz(Kgm2) 0, 39# 0, 3732 1, 95# 1, 933 1, 56# 1, 536
l(m) 0, 7# 0, 6980 0, 7# 0, 7001 1, 13# 1, 130d · 10#3(m) 0, 285# 0, 2903 0, 6# 0, 6011 1, 85# 1, 802
sux(m) 0, 185# 0, 1829 0, 22# 0, 2201 0# 0suy(m) +0, 001# +0, 0009314 +0, 001# +0, 0009314 0# 0suz(m) 0, 025# 0, 02403 0, 025# 0, 02563 0# 0sdx(m) 0, 180# 0, 1798 0, 243# 0, 2428 0# 0sdy(m) 0# +0, 0003986 0# "0, 0006157 "0, 001# "0, 0009314sdz(m) 0, 025# 0, 02566 0, 025# 0, 02541 0# 0
Tabella 5.9: valori dei parametri seme e quelli ottimizzati dalla simulazione per laconfigurazione II.
Dai grafici di figg. 5.30 e 5.33 si denota la presenza di ulteriori coppie poli-zeri nelle funzioni di trasferimento teoriche sul grado di libertà z, non misuratesperimentalmente. Questi accoppiamenti, che si trovano solo dalla simulazione,sono dovuti all’accoppiamento meccanico con /x. Abbiamo provato a studiareun’eventuale configurazione teorica in cui tali accoppiamenti siano minimizzati, esi è visto che essa corrisponde al caso in cui la massa di reazione e lo specchio sianoesattamente uguali, configurazione molto lontana da quella attuata dove mRM )2mMi. In ogni caso, gli accoppiamenti non sono rilevabili dalle misure e!ettuate:si potrebbe tentare di ripetere le misure del grado di libertà z somministrando
149
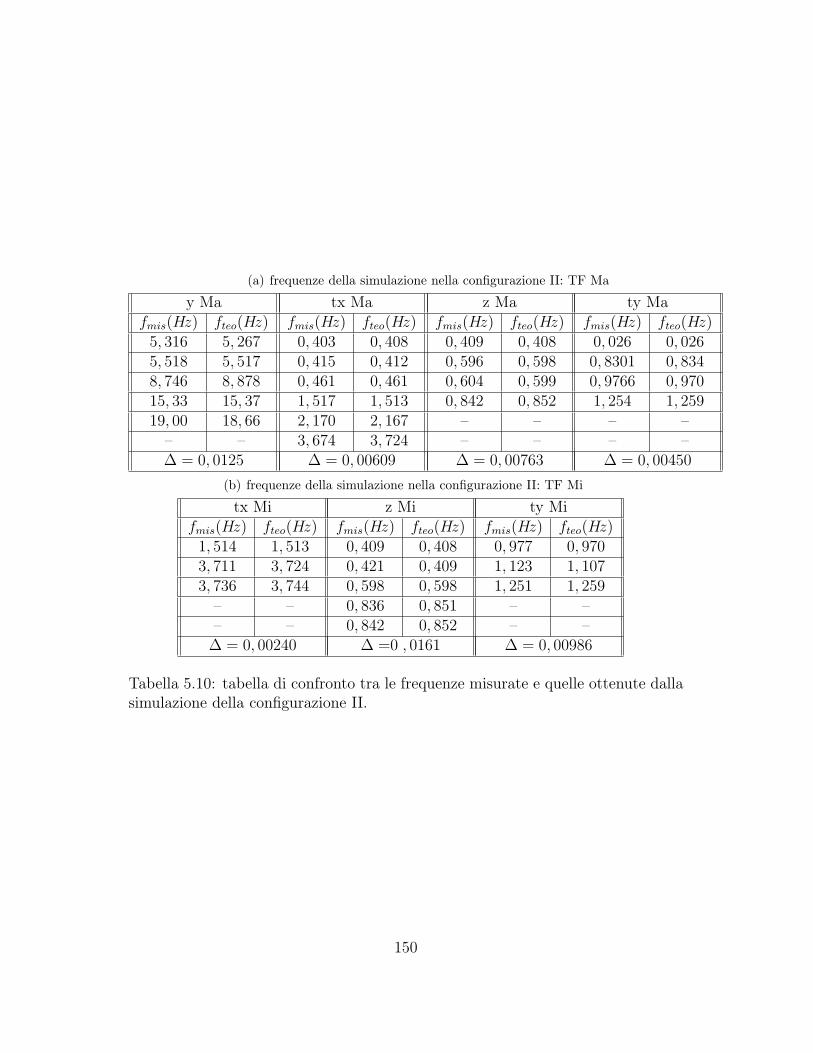
(a) frequenze della simulazione nella configurazione II: TF Ma
y Ma tx Ma z Ma ty Mafmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz)
5, 316 5, 267 0, 403 0, 408 0, 409 0, 408 0, 026 0, 0265, 518 5, 517 0, 415 0, 412 0, 596 0, 598 0, 8301 0, 8348, 746 8, 878 0, 461 0, 461 0, 604 0, 599 0, 9766 0, 97015, 33 15, 37 1, 517 1, 513 0, 842 0, 852 1, 254 1, 25919, 00 18, 66 2, 170 2, 167 – – – –
– – 3, 674 3, 724 – – – –# = 0, 0125 # = 0, 00609 # = 0, 00763 # = 0, 00450
(b) frequenze della simulazione nella configurazione II: TF Mi
tx Mi z Mi ty Mifmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz)
1, 514 1, 513 0, 409 0, 408 0, 977 0, 9703, 711 3, 724 0, 421 0, 409 1, 123 1, 1073, 736 3, 744 0, 598 0, 598 1, 251 1, 259
– – 0, 836 0, 851 – –– – 0, 842 0, 852 – –# = 0, 00240 # =0 , 0161 # = 0, 00986
Tabella 5.10: tabella di confronto tra le frequenze misurate e quelle ottenute dallasimulazione della configurazione II.
150
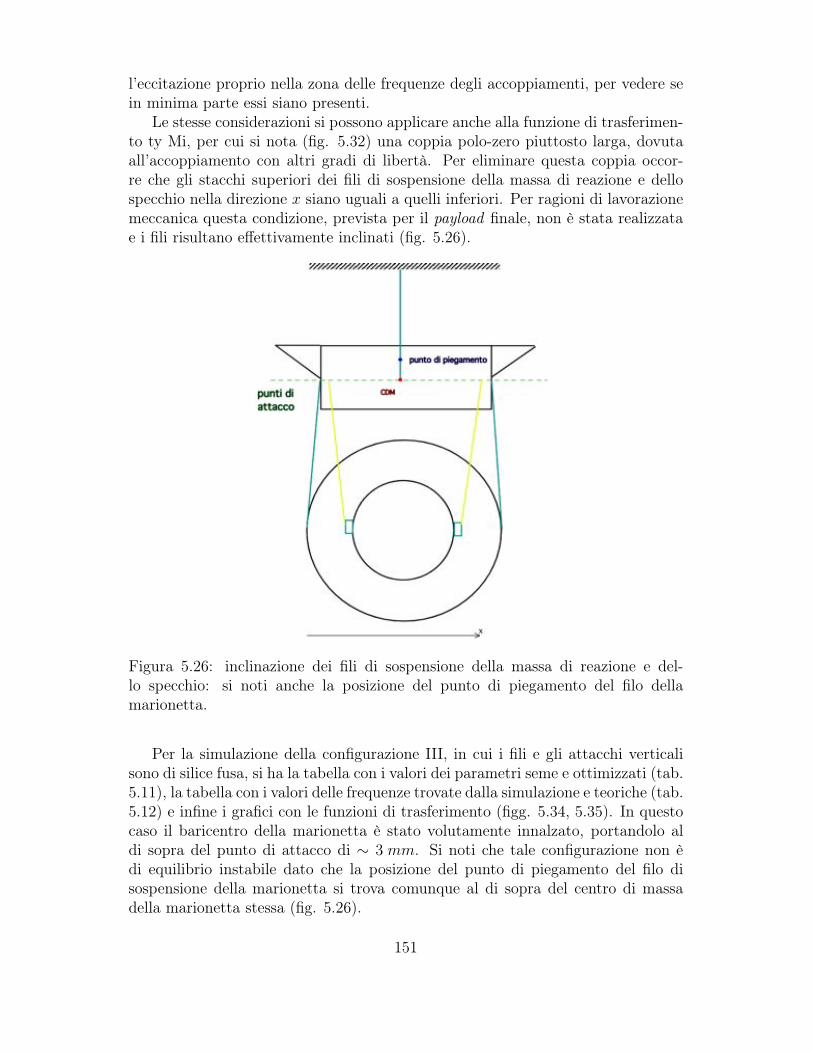
l’eccitazione proprio nella zona delle frequenze degli accoppiamenti, per vedere sein minima parte essi siano presenti.
Le stesse considerazioni si possono applicare anche alla funzione di trasferimen-to ty Mi, per cui si nota (fig. 5.32) una coppia polo-zero piuttosto larga, dovutaall’accoppiamento con altri gradi di libertà. Per eliminare questa coppia occor-re che gli stacchi superiori dei fili di sospensione della massa di reazione e dellospecchio nella direzione x siano uguali a quelli inferiori. Per ragioni di lavorazionemeccanica questa condizione, prevista per il payload finale, non è stata realizzatae i fili risultano e!ettivamente inclinati (fig. 5.26).
Figura 5.26: inclinazione dei fili di sospensione della massa di reazione e del-lo specchio: si noti anche la posizione del punto di piegamento del filo dellamarionetta.
Per la simulazione della configurazione III, in cui i fili e gli attacchi verticalisono di silice fusa, si ha la tabella con i valori dei parametri seme e ottimizzati (tab.5.11), la tabella con i valori delle frequenze trovate dalla simulazione e teoriche (tab.5.12) e infine i grafici con le funzioni di trasferimento (figg. 5.34, 5.35). In questocaso il baricentro della marionetta è stato volutamente innalzato, portandolo aldi sopra del punto di attacco di ) 3 mm. Si noti che tale configurazione non èdi equilibrio instabile dato che la posizione del punto di piegamento del filo disospensione della marionetta si trova comunque al di sopra del centro di massadella marionetta stessa (fig. 5.26).
151
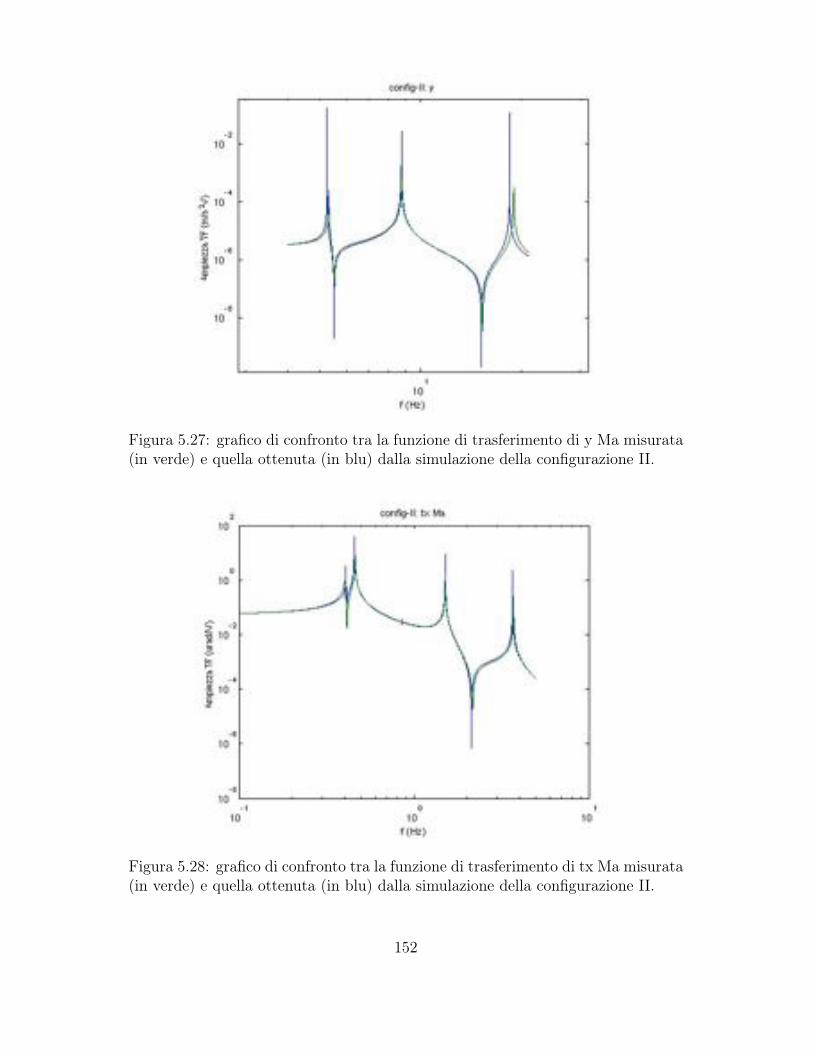
Figura 5.27: grafico di confronto tra la funzione di trasferimento di y Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione II.
Figura 5.28: grafico di confronto tra la funzione di trasferimento di tx Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione II.
152
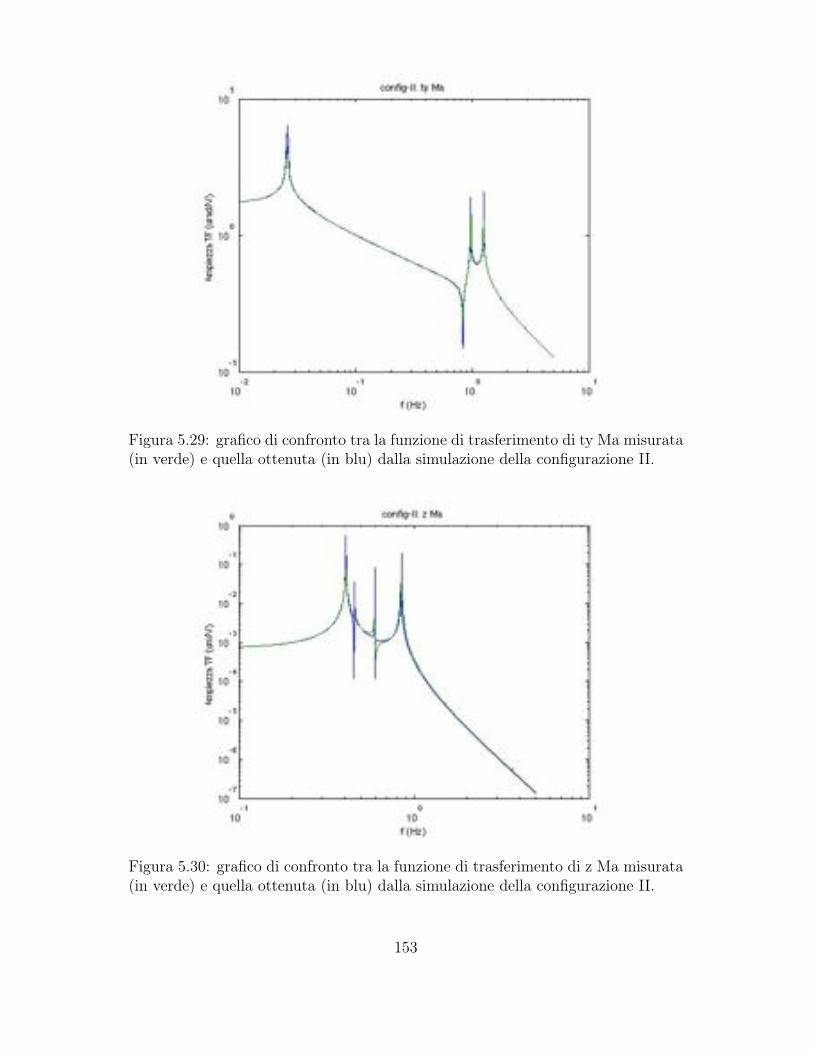
Figura 5.29: grafico di confronto tra la funzione di trasferimento di ty Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione II.
Figura 5.30: grafico di confronto tra la funzione di trasferimento di z Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione II.
153
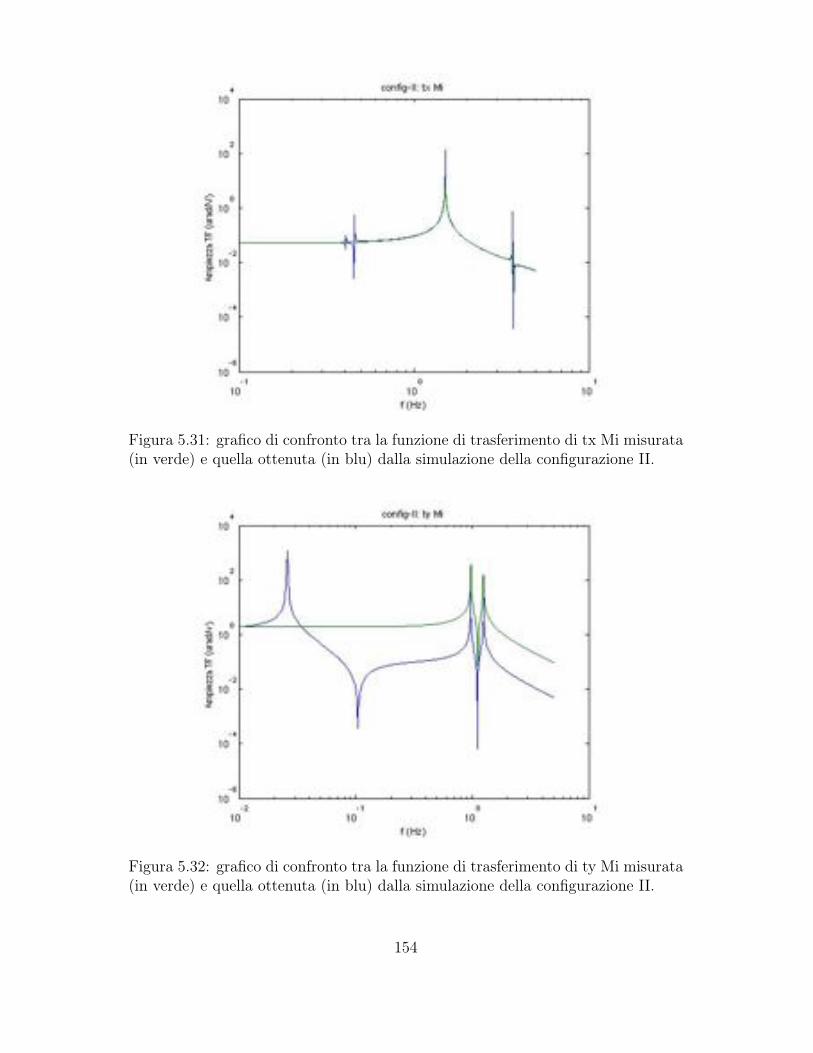
Figura 5.31: grafico di confronto tra la funzione di trasferimento di tx Mi misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione II.
Figura 5.32: grafico di confronto tra la funzione di trasferimento di ty Mi misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione II.
154
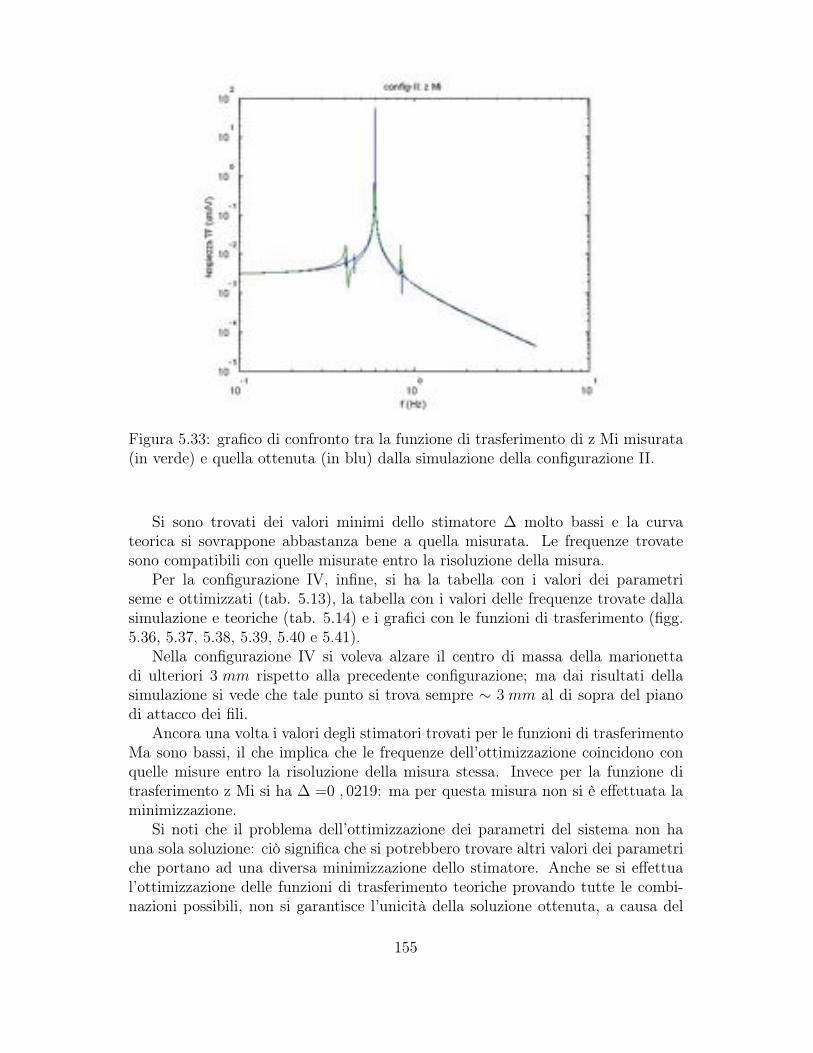
Figura 5.33: grafico di confronto tra la funzione di trasferimento di z Mi misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione II.
Si sono trovati dei valori minimi dello stimatore # molto bassi e la curvateorica si sovrappone abbastanza bene a quella misurata. Le frequenze trovatesono compatibili con quelle misurate entro la risoluzione della misura.
Per la configurazione IV, infine, si ha la tabella con i valori dei parametriseme e ottimizzati (tab. 5.13), la tabella con i valori delle frequenze trovate dallasimulazione e teoriche (tab. 5.14) e i grafici con le funzioni di trasferimento (figg.5.36, 5.37, 5.38, 5.39, 5.40 e 5.41).
Nella configurazione IV si voleva alzare il centro di massa della marionettadi ulteriori 3 mm rispetto alla precedente configurazione; ma dai risultati dellasimulazione si vede che tale punto si trova sempre ) 3 mm al di sopra del pianodi attacco dei fili.
Ancora una volta i valori degli stimatori trovati per le funzioni di trasferimentoMa sono bassi, il che implica che le frequenze dell’ottimizzazione coincidono conquelle misure entro la risoluzione della misura stessa. Invece per la funzione ditrasferimento z Mi si ha # =0 , 0219: ma per questa misura non si è e!ettuata laminimizzazione.
Si noti che il problema dell’ottimizzazione dei parametri del sistema non hauna sola soluzione: ciò significa che si potrebbero trovare altri valori dei parametriche portano ad una diversa minimizzazione dello stimatore. Anche se si e!ettual’ottimizzazione delle funzioni di trasferimento teoriche provando tutte le combi-nazioni possibili, non si garantisce l’unicità della soluzione ottenuta, a causa del
155
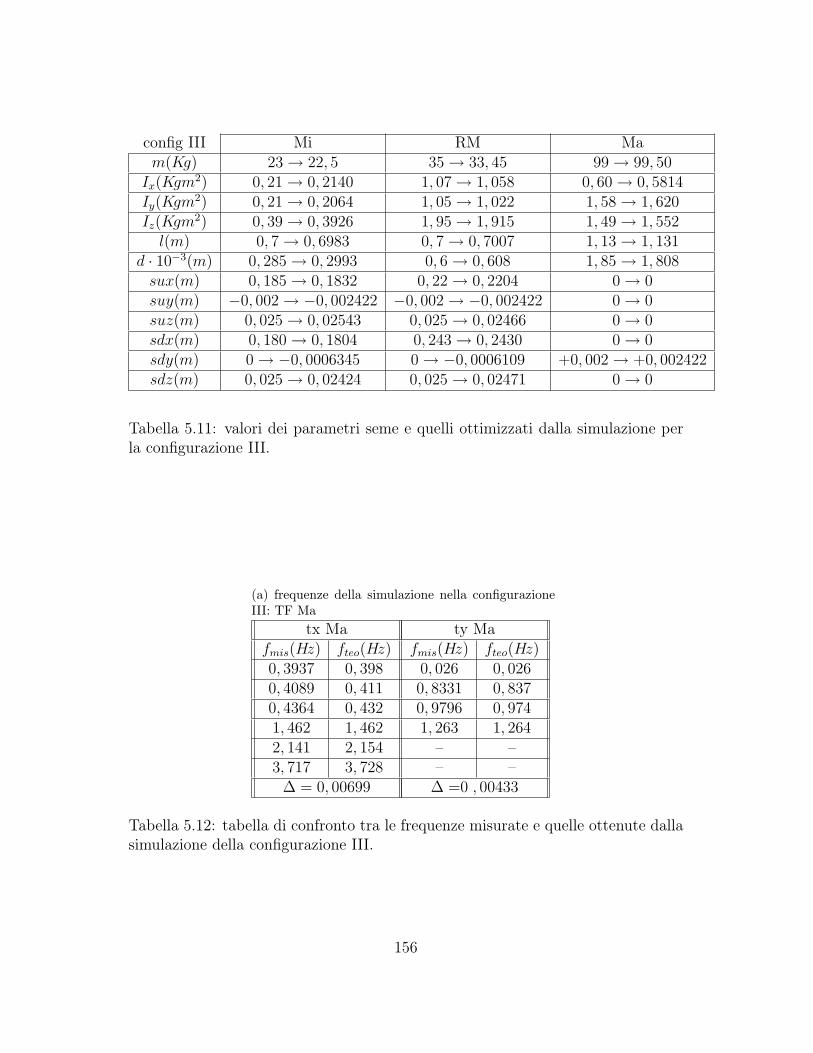
config III Mi RM Mam(Kg) 23# 22, 5 35# 33, 45 99# 99, 50
Ix(Kgm2) 0, 21# 0, 2140 1, 07# 1, 058 0, 60# 0, 5814Iy(Kgm2) 0, 21# 0, 2064 1, 05# 1, 022 1, 58# 1, 620Iz(Kgm2) 0, 39# 0, 3926 1, 95# 1, 915 1, 49# 1, 552
l(m) 0, 7# 0, 6983 0, 7# 0, 7007 1, 13# 1, 131d · 10#3(m) 0, 285# 0, 2993 0, 6# 0, 608 1, 85# 1, 808
sux(m) 0, 185# 0, 1832 0, 22# 0, 2204 0# 0suy(m) "0, 002# "0, 002422 "0, 002# "0, 002422 0# 0suz(m) 0, 025# 0, 02543 0, 025# 0, 02466 0# 0sdx(m) 0, 180# 0, 1804 0, 243# 0, 2430 0# 0sdy(m) 0# "0, 0006345 0# "0, 0006109 +0, 002# +0, 002422sdz(m) 0, 025# 0, 02424 0, 025# 0, 02471 0# 0
Tabella 5.11: valori dei parametri seme e quelli ottimizzati dalla simulazione perla configurazione III.
(a) frequenze della simulazione nella configurazioneIII: TF Ma
tx Ma ty Mafmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz)0, 3937 0, 398 0, 026 0, 0260, 4089 0, 411 0, 8331 0, 8370, 4364 0, 432 0, 9796 0, 9741, 462 1, 462 1, 263 1, 2642, 141 2, 154 – –3, 717 3, 728 – –
# = 0, 00699 # =0 , 00433
Tabella 5.12: tabella di confronto tra le frequenze misurate e quelle ottenute dallasimulazione della configurazione III.
156
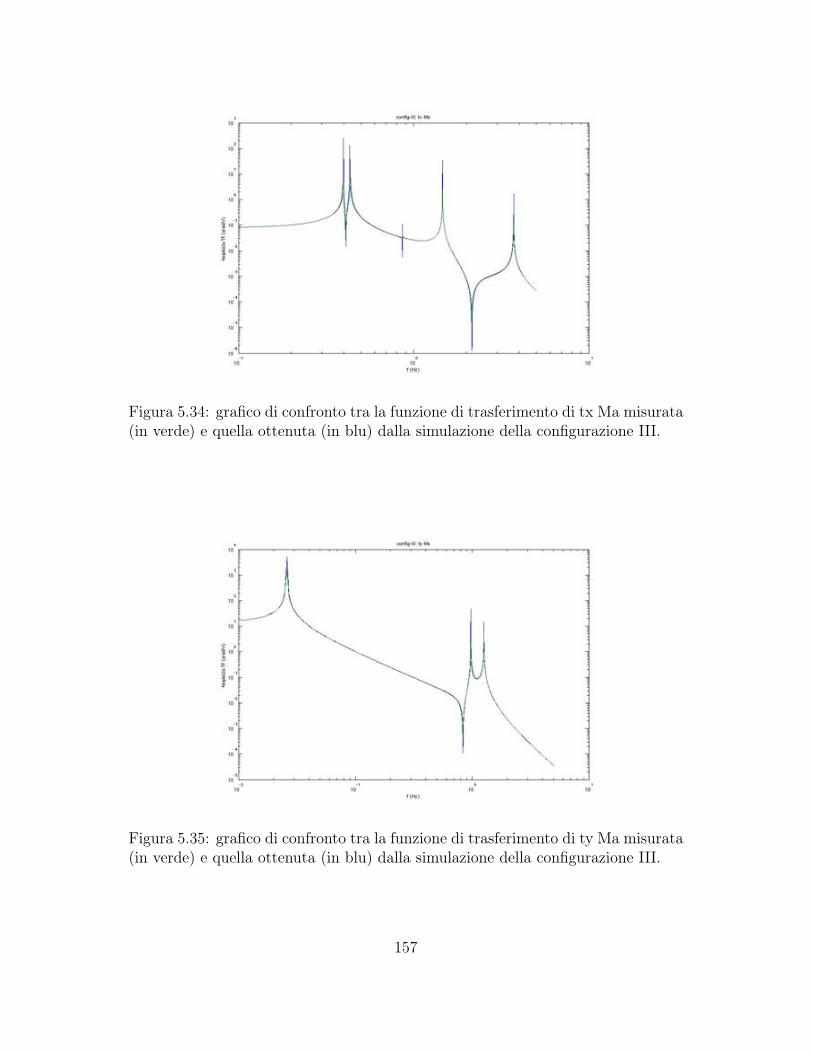
Figura 5.34: grafico di confronto tra la funzione di trasferimento di tx Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione III.
Figura 5.35: grafico di confronto tra la funzione di trasferimento di ty Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione III.
157
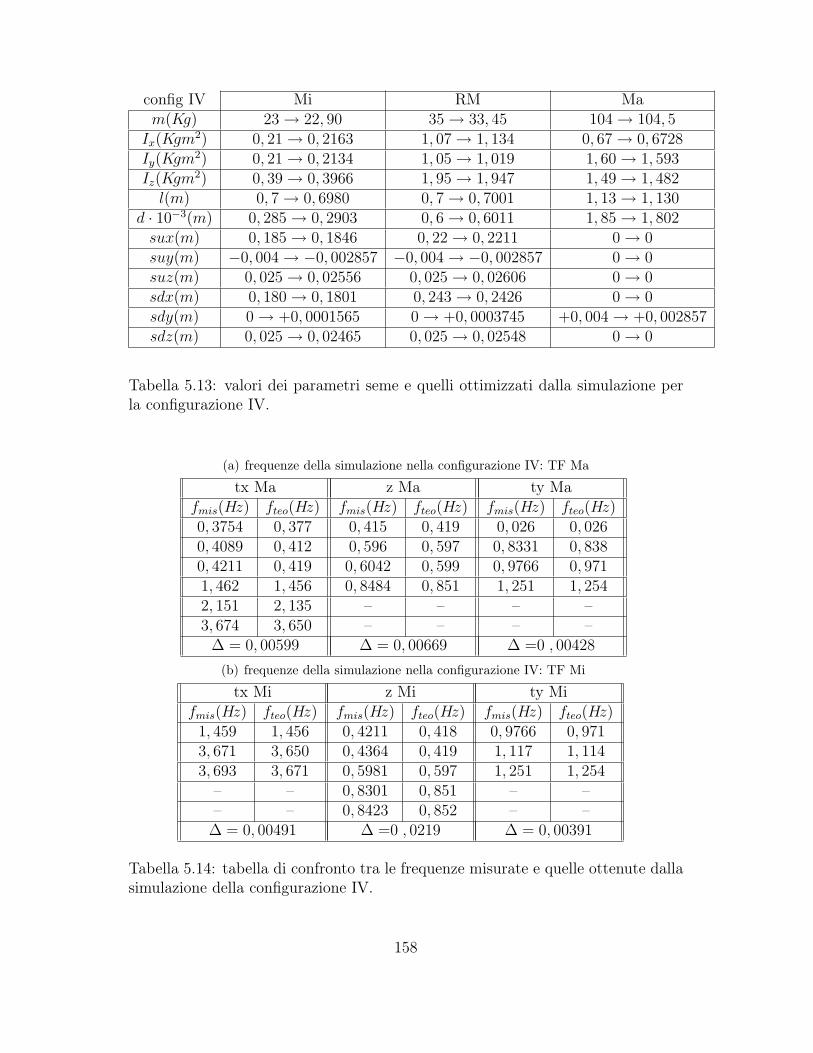
config IV Mi RM Mam(Kg) 23# 22, 90 35# 33, 45 104# 104, 5
Ix(Kgm2) 0, 21# 0, 2163 1, 07# 1, 134 0, 67# 0, 6728Iy(Kgm2) 0, 21# 0, 2134 1, 05# 1, 019 1, 60# 1, 593Iz(Kgm2) 0, 39# 0, 3966 1, 95# 1, 947 1, 49# 1, 482
l(m) 0, 7# 0, 6980 0, 7# 0, 7001 1, 13# 1, 130d · 10#3(m) 0, 285# 0, 2903 0, 6# 0, 6011 1, 85# 1, 802
sux(m) 0, 185# 0, 1846 0, 22# 0, 2211 0# 0suy(m) "0, 004# "0, 002857 "0, 004# "0, 002857 0# 0suz(m) 0, 025# 0, 02556 0, 025# 0, 02606 0# 0sdx(m) 0, 180# 0, 1801 0, 243# 0, 2426 0# 0sdy(m) 0# +0, 0001565 0# +0, 0003745 +0, 004# +0, 002857sdz(m) 0, 025# 0, 02465 0, 025# 0, 02548 0# 0
Tabella 5.13: valori dei parametri seme e quelli ottimizzati dalla simulazione perla configurazione IV.
(a) frequenze della simulazione nella configurazione IV: TF Ma
tx Ma z Ma ty Mafmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz)0, 3754 0, 377 0, 415 0, 419 0, 026 0, 0260, 4089 0, 412 0, 596 0, 597 0, 8331 0, 8380, 4211 0, 419 0, 6042 0, 599 0, 9766 0, 9711, 462 1, 456 0, 8484 0, 851 1, 251 1, 2542, 151 2, 135 – – – –3, 674 3, 650 – – – –
# = 0, 00599 # = 0, 00669 # =0 , 00428
(b) frequenze della simulazione nella configurazione IV: TF Mi
tx Mi z Mi ty Mifmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz) fmis(Hz) fteo(Hz)
1, 459 1, 456 0, 4211 0, 418 0, 9766 0, 9713, 671 3, 650 0, 4364 0, 419 1, 117 1, 1143, 693 3, 671 0, 5981 0, 597 1, 251 1, 254
– – 0, 8301 0, 851 – –– – 0, 8423 0, 852 – –# = 0, 00491 # =0 , 0219 # = 0, 00391
Tabella 5.14: tabella di confronto tra le frequenze misurate e quelle ottenute dallasimulazione della configurazione IV.
158
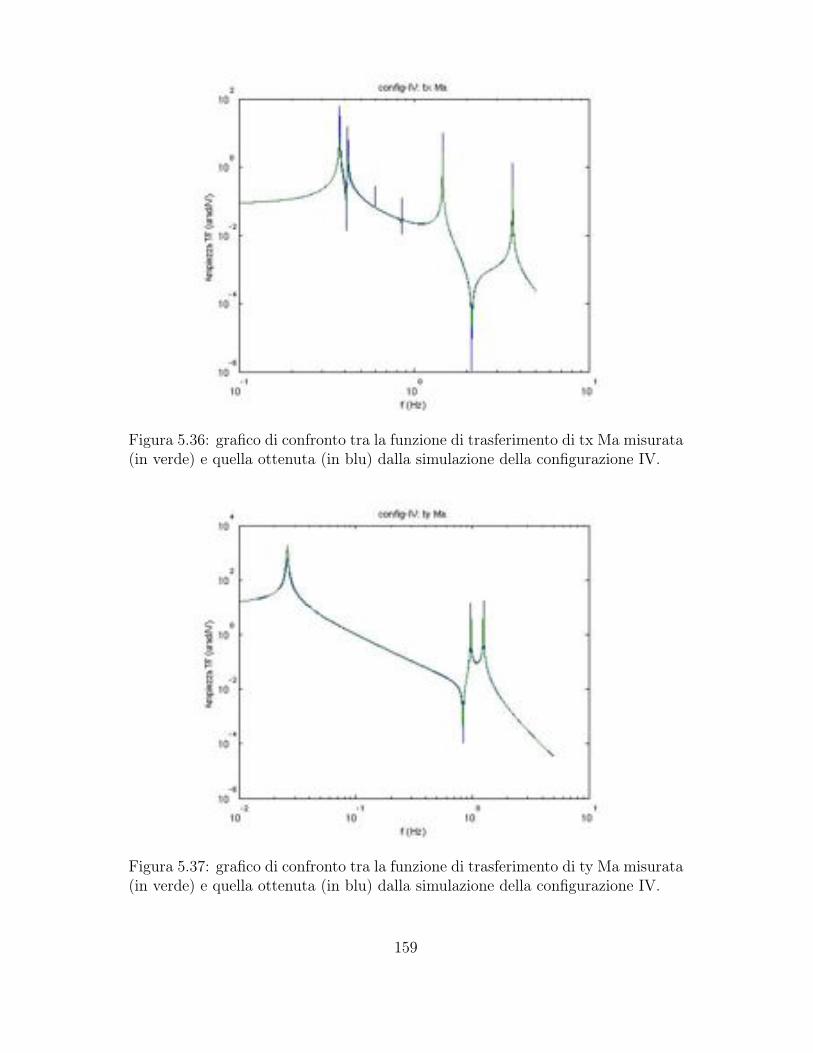
Figura 5.36: grafico di confronto tra la funzione di trasferimento di tx Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione IV.
Figura 5.37: grafico di confronto tra la funzione di trasferimento di ty Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione IV.
159
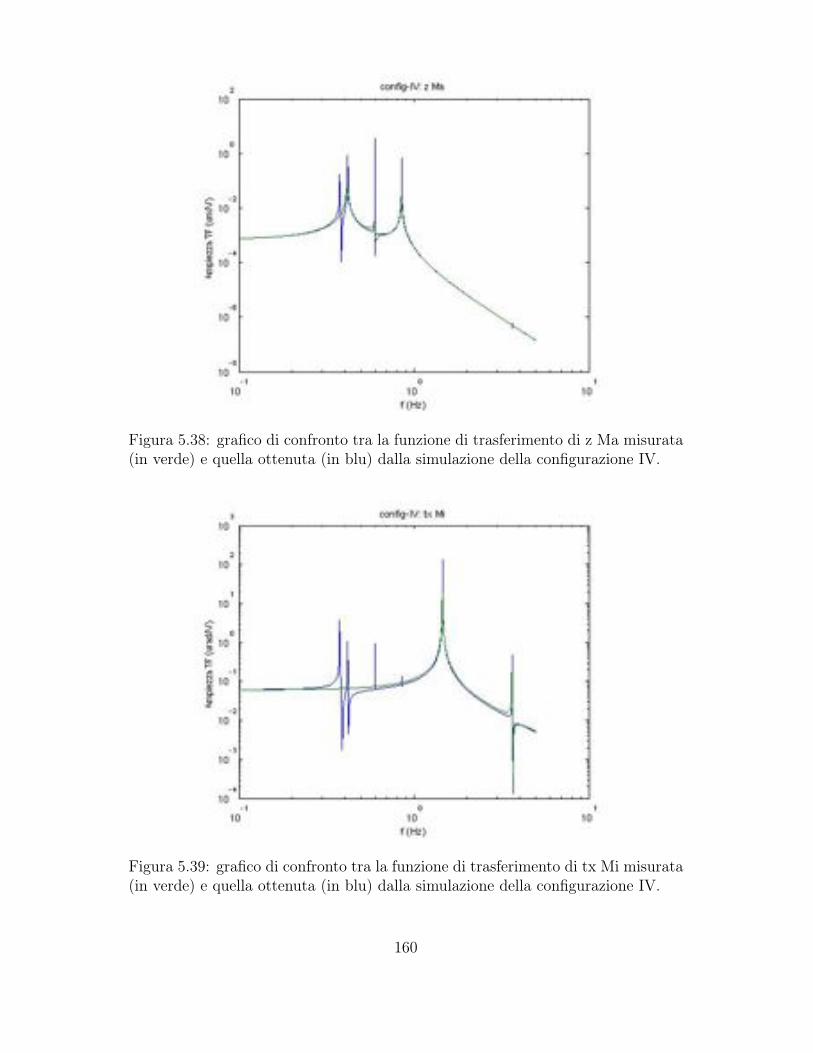
Figura 5.38: grafico di confronto tra la funzione di trasferimento di z Ma misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione IV.
Figura 5.39: grafico di confronto tra la funzione di trasferimento di tx Mi misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione IV.
160
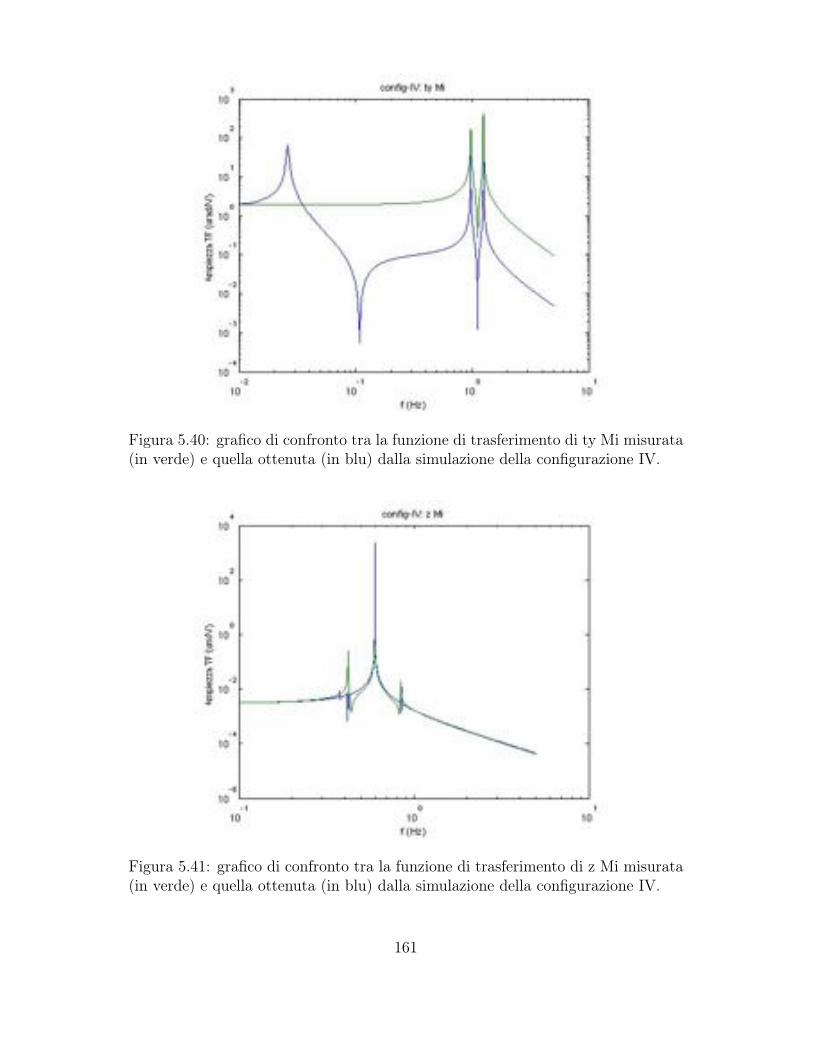
Figura 5.40: grafico di confronto tra la funzione di trasferimento di ty Mi misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione IV.
Figura 5.41: grafico di confronto tra la funzione di trasferimento di z Mi misurata(in verde) e quella ottenuta (in blu) dalla simulazione della configurazione IV.
161
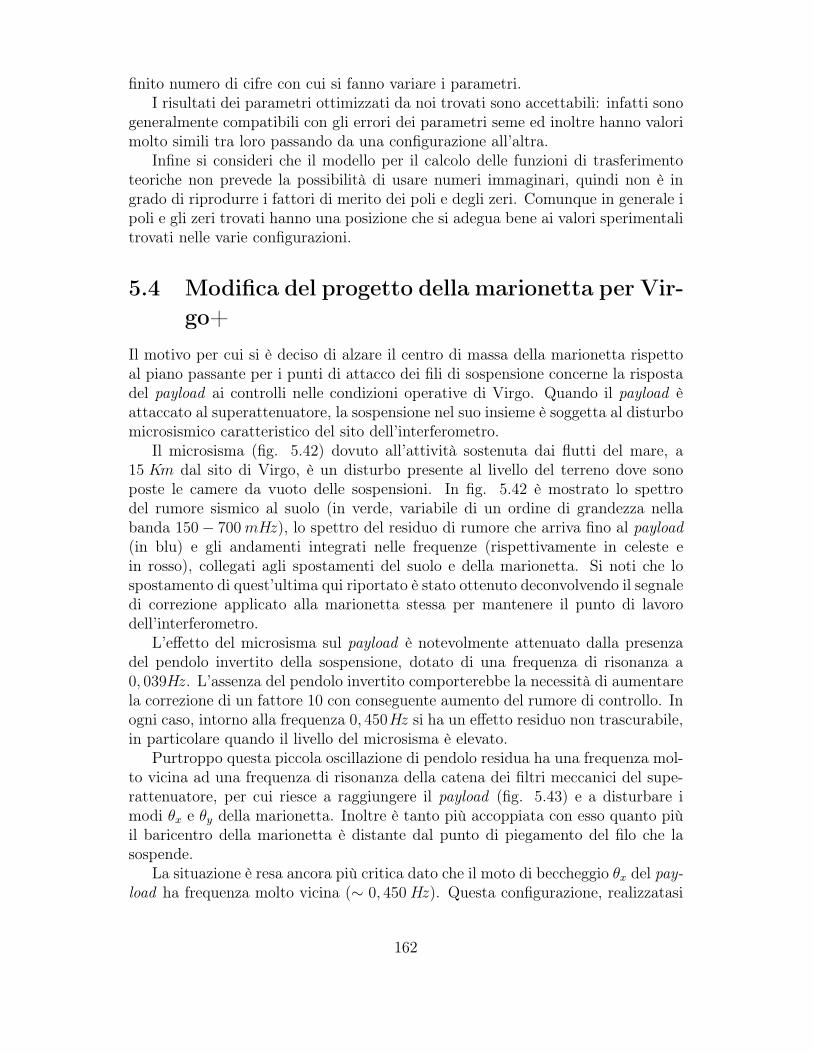
finito numero di cifre con cui si fanno variare i parametri.I risultati dei parametri ottimizzati da noi trovati sono accettabili: infatti sono
generalmente compatibili con gli errori dei parametri seme ed inoltre hanno valorimolto simili tra loro passando da una configurazione all’altra.
Infine si consideri che il modello per il calcolo delle funzioni di trasferimentoteoriche non prevede la possibilità di usare numeri immaginari, quindi non è ingrado di riprodurre i fattori di merito dei poli e degli zeri. Comunque in generale ipoli e gli zeri trovati hanno una posizione che si adegua bene ai valori sperimentalitrovati nelle varie configurazioni.
5.4 Modifica del progetto della marionetta per Vir-go+
Il motivo per cui si è deciso di alzare il centro di massa della marionetta rispettoal piano passante per i punti di attacco dei fili di sospensione concerne la rispostadel payload ai controlli nelle condizioni operative di Virgo. Quando il payload èattaccato al superattenuatore, la sospensione nel suo insieme è soggetta al disturbomicrosismico caratteristico del sito dell’interferometro.
Il microsisma (fig. 5.42) dovuto all’attività sostenuta dai flutti del mare, a15 Km dal sito di Virgo, è un disturbo presente al livello del terreno dove sonoposte le camere da vuoto delle sospensioni. In fig. 5.42 è mostrato lo spettrodel rumore sismico al suolo (in verde, variabile di un ordine di grandezza nellabanda 150" 700 mHz), lo spettro del residuo di rumore che arriva fino al payload(in blu) e gli andamenti integrati nelle frequenze (rispettivamente in celeste ein rosso), collegati agli spostamenti del suolo e della marionetta. Si noti che lospostamento di quest’ultima qui riportato è stato ottenuto deconvolvendo il segnaledi correzione applicato alla marionetta stessa per mantenere il punto di lavorodell’interferometro.
L’e!etto del microsisma sul payload è notevolmente attenuato dalla presenzadel pendolo invertito della sospensione, dotato di una frequenza di risonanza a0, 039Hz. L’assenza del pendolo invertito comporterebbe la necessità di aumentarela correzione di un fattore 10 con conseguente aumento del rumore di controllo. Inogni caso, intorno alla frequenza 0, 450Hz si ha un e!etto residuo non trascurabile,in particolare quando il livello del microsisma è elevato.
Purtroppo questa piccola oscillazione di pendolo residua ha una frequenza mol-to vicina ad una frequenza di risonanza della catena dei filtri meccanici del supe-rattenuatore, per cui riesce a raggiungere il payload (fig. 5.43) e a disturbare imodi /x e /y della marionetta. Inoltre è tanto più accoppiata con esso quanto piùil baricentro della marionetta è distante dal punto di piegamento del filo che lasospende.
La situazione è resa ancora più critica dato che il moto di beccheggio /x del pay-load ha frequenza molto vicina () 0, 450 Hz). Questa configurazione, realizzatasi
162
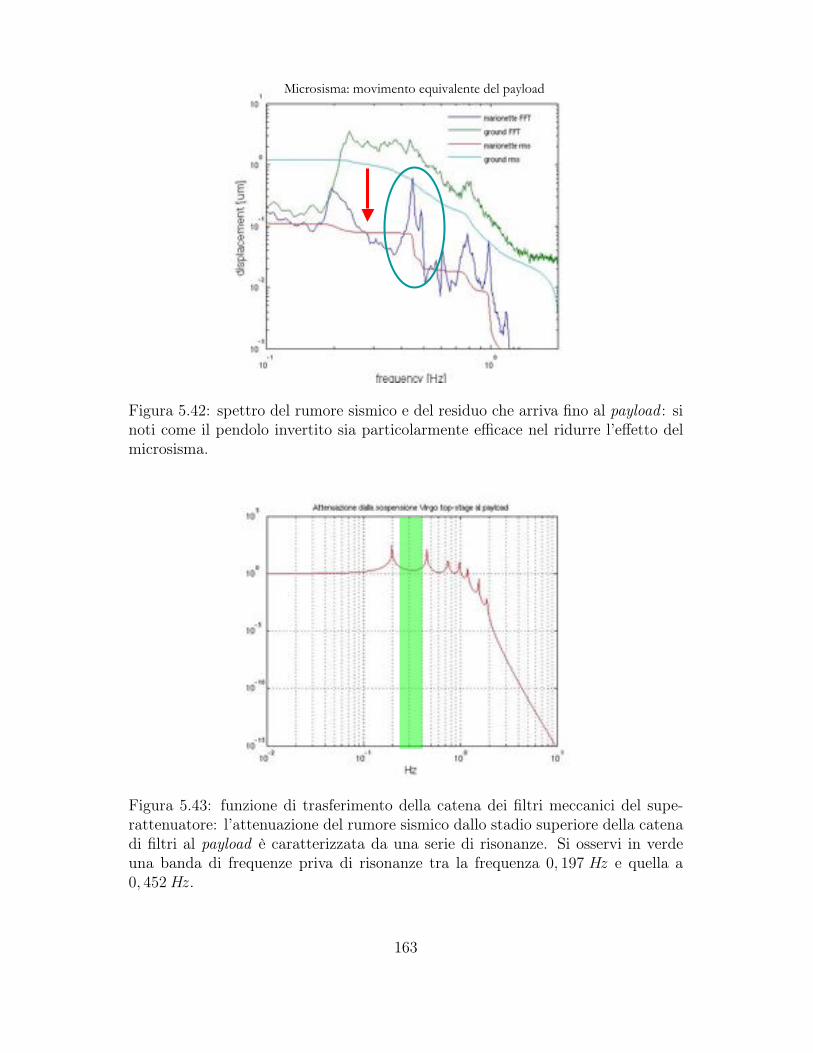
! Microsisma: movimento equivalente del payload
Figura 5.42: spettro del rumore sismico e del residuo che arriva fino al payload : sinoti come il pendolo invertito sia particolarmente e"cace nel ridurre l’e!etto delmicrosisma.
!
Figura 5.43: funzione di trasferimento della catena dei filtri meccanici del supe-rattenuatore: l’attenuazione del rumore sismico dallo stadio superiore della catenadi filtri al payload è caratterizzata da una serie di risonanze. Si osservi in verdeuna banda di frequenze priva di risonanze tra la frequenza 0, 197 Hz e quella a0, 452 Hz.
163
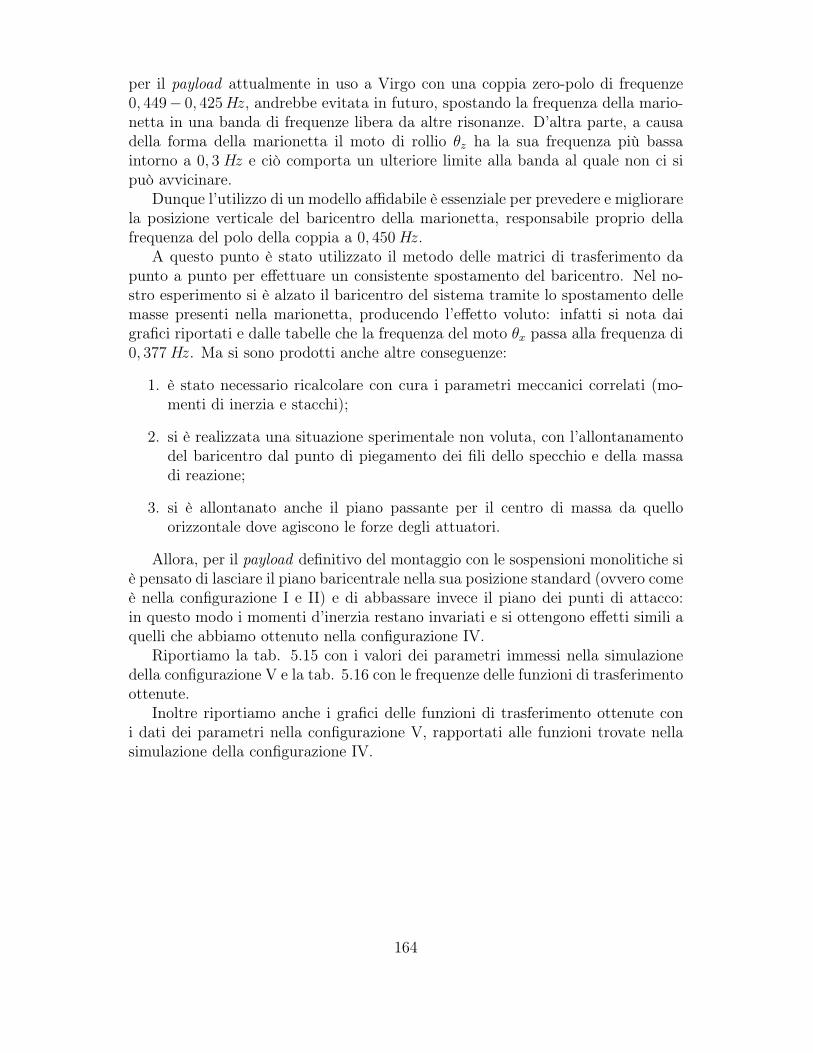
per il payload attualmente in uso a Virgo con una coppia zero-polo di frequenze0, 449" 0, 425 Hz, andrebbe evitata in futuro, spostando la frequenza della mario-netta in una banda di frequenze libera da altre risonanze. D’altra parte, a causadella forma della marionetta il moto di rollio /z ha la sua frequenza più bassaintorno a 0, 3 Hz e ciò comporta un ulteriore limite alla banda al quale non ci sipuò avvicinare.
Dunque l’utilizzo di un modello a"dabile è essenziale per prevedere e migliorarela posizione verticale del baricentro della marionetta, responsabile proprio dellafrequenza del polo della coppia a 0, 450 Hz.
A questo punto è stato utilizzato il metodo delle matrici di trasferimento dapunto a punto per e!ettuare un consistente spostamento del baricentro. Nel no-stro esperimento si è alzato il baricentro del sistema tramite lo spostamento dellemasse presenti nella marionetta, producendo l’e!etto voluto: infatti si nota daigrafici riportati e dalle tabelle che la frequenza del moto /x passa alla frequenza di0, 377 Hz. Ma si sono prodotti anche altre conseguenze:
1. è stato necessario ricalcolare con cura i parametri meccanici correlati (mo-menti di inerzia e stacchi);
2. si è realizzata una situazione sperimentale non voluta, con l’allontanamentodel baricentro dal punto di piegamento dei fili dello specchio e della massadi reazione;
3. si è allontanato anche il piano passante per il centro di massa da quelloorizzontale dove agiscono le forze degli attuatori.
Allora, per il payload definitivo del montaggio con le sospensioni monolitiche siè pensato di lasciare il piano baricentrale nella sua posizione standard (ovvero comeè nella configurazione I e II) e di abbassare invece il piano dei punti di attacco:in questo modo i momenti d’inerzia restano invariati e si ottengono e!etti simili aquelli che abbiamo ottenuto nella configurazione IV.
Riportiamo la tab. 5.15 con i valori dei parametri immessi nella simulazionedella configurazione V e la tab. 5.16 con le frequenze delle funzioni di trasferimentoottenute.
Inoltre riportiamo anche i grafici delle funzioni di trasferimento ottenute coni dati dei parametri nella configurazione V, rapportati alle funzioni trovate nellasimulazione della configurazione IV.
164
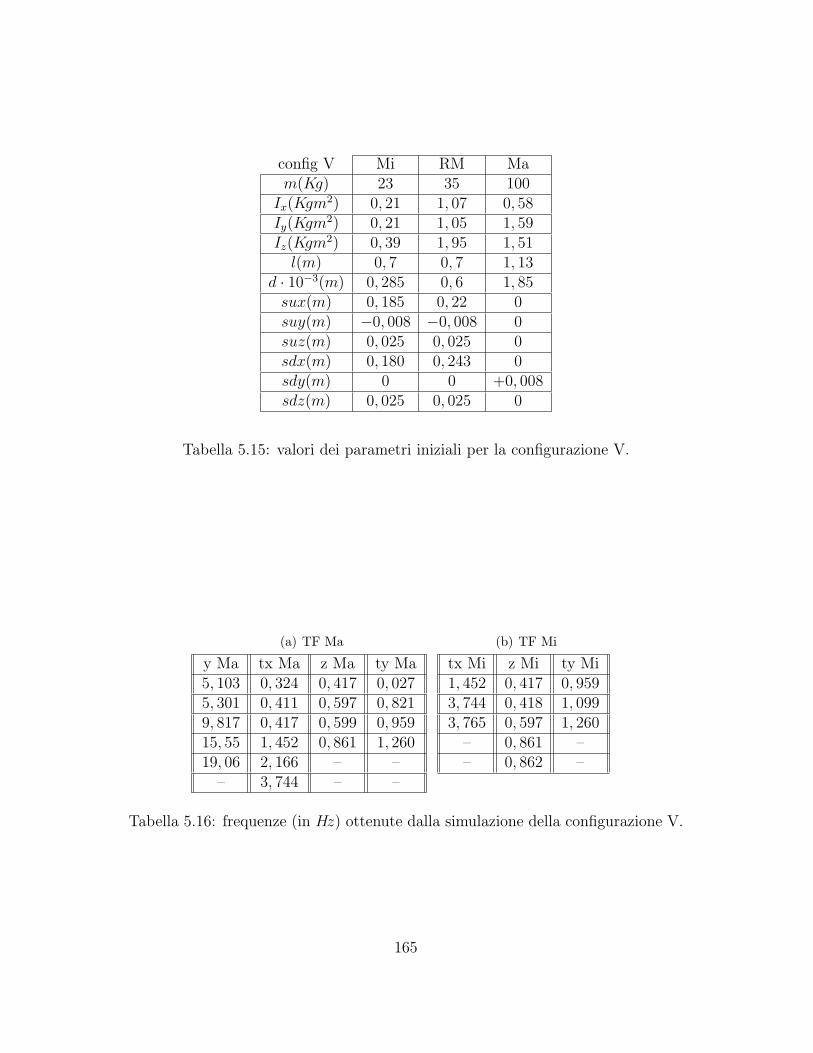
config V Mi RM Mam(Kg) 23 35 100
Ix(Kgm2) 0, 21 1, 07 0, 58Iy(Kgm2) 0, 21 1, 05 1, 59Iz(Kgm2) 0, 39 1, 95 1, 51
l(m) 0, 7 0, 7 1, 13d · 10#3(m) 0, 285 0, 6 1, 85
sux(m) 0, 185 0, 22 0suy(m) "0, 008 "0, 008 0suz(m) 0, 025 0, 025 0sdx(m) 0, 180 0, 243 0sdy(m) 0 0 +0, 008sdz(m) 0, 025 0, 025 0
Tabella 5.15: valori dei parametri iniziali per la configurazione V.
(a) TF Ma
y Ma tx Ma z Ma ty Ma5, 103 0, 324 0, 417 0, 0275, 301 0, 411 0, 597 0, 8219, 817 0, 417 0, 599 0, 95915, 55 1, 452 0, 861 1, 26019, 06 2, 166 – –
– 3, 744 – –
(b) TF Mi
tx Mi z Mi ty Mi1, 452 0, 417 0, 9593, 744 0, 418 1, 0993, 765 0, 597 1, 260
– 0, 861 –– 0, 862 –
Tabella 5.16: frequenze (in Hz) ottenute dalla simulazione della configurazione V.
165
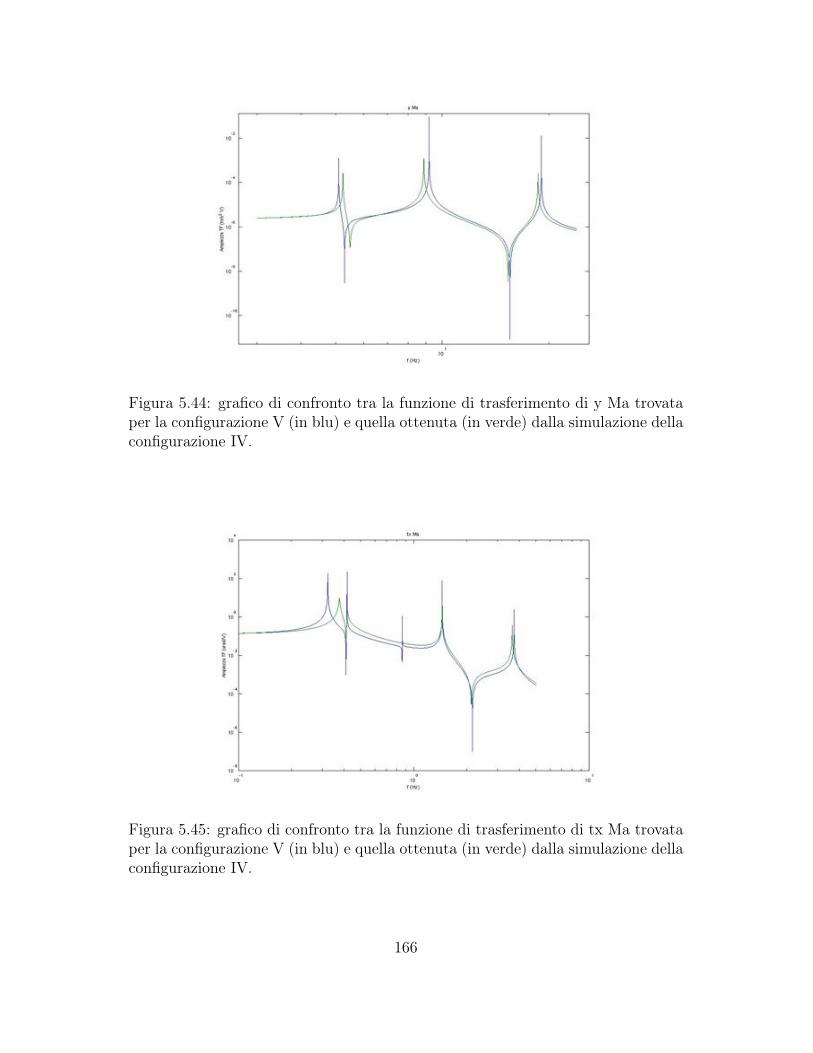
Figura 5.44: grafico di confronto tra la funzione di trasferimento di y Ma trovataper la configurazione V (in blu) e quella ottenuta (in verde) dalla simulazione dellaconfigurazione IV.
Figura 5.45: grafico di confronto tra la funzione di trasferimento di tx Ma trovataper la configurazione V (in blu) e quella ottenuta (in verde) dalla simulazione dellaconfigurazione IV.
166
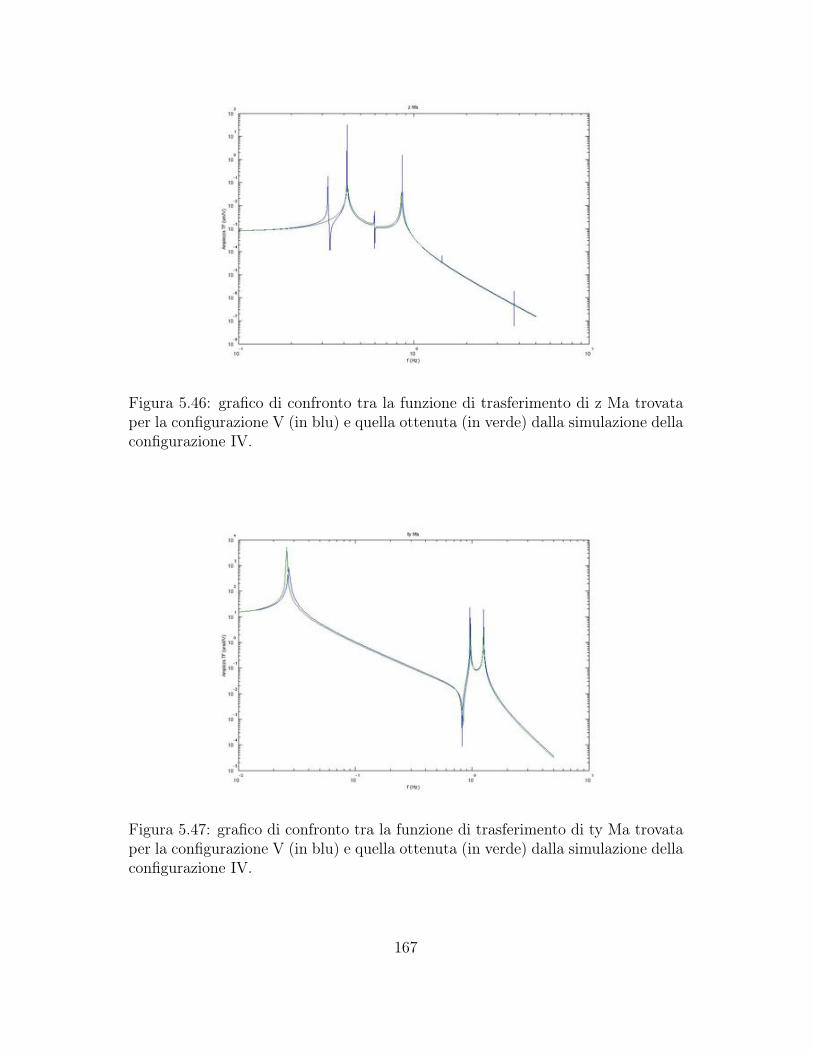
Figura 5.46: grafico di confronto tra la funzione di trasferimento di z Ma trovataper la configurazione V (in blu) e quella ottenuta (in verde) dalla simulazione dellaconfigurazione IV.
Figura 5.47: grafico di confronto tra la funzione di trasferimento di ty Ma trovataper la configurazione V (in blu) e quella ottenuta (in verde) dalla simulazione dellaconfigurazione IV.
167

M

Conclusioni
La Teoria della Relatività Generale ha posto l’attenzione sull’esistenza delle on-de gravitazionali, perturbazioni della metrica dello spazio-tempo i cui e!etti sonoosservabili misurando la distanza tra punti materiali. Questo tipo di radiazioneè connessa alla variazione della distribuzione di masse di un sistema e ci permet-terebbe di avere informazioni sulle sorgenti astrofisiche che non emettono nellospettro elettromagnetico e di comprendere maggiormente i fenomeni più energeticiche avvengono nell’universo.
L’idea sulla quale si basa il funzionamento degli interferometri per la rivelazionedelle onde gravitazionali è quella di utilizzare la luce come metro per valutare ladistanza tra due corpi estesi. All’atto pratico questi sono due specchi sostenutitramite sofisticati sistemi di sospensione meccanica che ne assicurano lo stato quasiinerziale. Gli ultimi stadi della sospensione sono inoltre equipaggiati con un sistemadi controllo della posizione che ne consente l’orientazione.
Nonostante gli impegni della comunità scientifica nazionale e internazionale,gli interferometri oggi esistenti hanno una banda di frequenze di sensibilità ancoratroppo bassa per arrivare a poter rilevare un numero consistente di eventi. Aquesto scopo è necessario attuare delle modifiche agli attuali strumenti, per ridurresostanzialmente il contributo dei rumori in essi presenti.
Nel caso specifico di Virgo, il rumore ambientale è appositamente attenuatoda un sofisticato apparato, chiamato superattenuatore. Invece per la riduzione delcontributo del rumore termico si prevede di sostituire i materiali che compongonogli specchi e le sospensioni con un altro materiale.
Nel nostro lavoro ci siamo interessati allo studio di fattibilità di sospensionicostituite da silice fusa, un materiale che ha caratteristiche chimico-fisiche tali daridurre il contributo del rumore termico alle basse frequenze.
Inserendosi nel gruppo di ricerca “sospensioni monolitiche” abbiamo seguitonel dettaglio la realizzazione di un prototipo di payload dotato di sospensioni disilice fusa e abbiamo provveduto alla messa in funzione di un laboratorio, dedicatoalle fasi di test dell’apparato, presso il sito di Virgo a Pisa. Il payload non è statosospeso ad un superattenuatore, come prevede la configurazione standard di Virgo,ma ad un telaio rigido e ancorato al suolo, in modo da verificare la robustezzadella sospensione in silice fusa e facilitare il suo assemblaggio. In seguito abbiamoinstallato gli apparati essenziali per il controllo del payload, rendendo compatibili irilevatori e i componenti elettronici della catena di controllo locale in uso in Virgo
169

con la specifica configurazione realizzata.In particolare il nostro lavoro è stato quello di caratterizzare la meccanica
del payload dotato di fibre in silice fusa e di provvedere al sistema di controllo.Non appena il payload e l’apparato di controllo sono stati disponibili, il sistemaè stato portato al funzionamento e abbiamo e!ettuato le misure delle funzione ditrasferimento per i diversi gradi di libertà del sistema.
Contemporaneamente, si è deciso di sviluppare un modello teorico della mec-canica del payload con cui confrontare i risultati sperimentali. Facendo variarefinemente i parametri caratteristici del sistema si trova un buon accordo tra irisultati sperimentali e quelli ottenuti dal modello teorico.
L’e"cacia della modellizzazione teorica ha permesso di ipotizzare alcune modi-fiche del prototipo, fondate sull’esperienza acquisita dalla collaborazione riguardoal funzionamento globale della sospensione antisismica.
Tali modifiche sono state implementate nel progetto finale del payload mono-litico attualmente in costruzione. Il laboratorio per il test del sistema continueràa svolgere la sua attività specificando i dettagli per la messa in funzione dellasospensione monolitica finchè essa non verrà installata in Virgo.
170
Appendice A
Concetti fondamentali della teoriadella Relatività Generale
I tensori
Introduciamo qui il concetto di tensore e in particolare quello di tensore metrico.
Un tensore di tipo1
NN "
2
calcolato in un punto P è definito geometricamente
come una funzione lineare che associa un valore a N uno-forme (cioè N funzionilineari reali di vettori) e a N " vettori. Ne consegue che il tensore metrico genericogµ# a sua volta associa a due vettori "#v e "#u un numero, caratteristico della metricadello spazio-tempo, dato, specificatamente, dal prodotto scalare tra i due vettori:
g("#v ,"#u ) = "#v ·"#u (A.1)
Il tensore metrico ha un’importante proprietà: permette di calcolare la distanzatra due punti dello spazio-tempo in un dato sistema di coordinate. Prendiamo adesempio le coordinate dello spazio-tempo quadridimensionale:
(x0, x1, x2, x3) = (ct, x, y, z) (A.2)
e due punti P = (x0, x1, x2, x3) e P " = (x0 + dx0, x1 + dx1, x2 + dx2, x3 + dx3) inquesto sistema. Allora la loro distanza sarà:
ds2 = gµ#dxµdx# (A.3)
Nel caso di uno spazio-tempo piatto, dato dalla metrica di Minkowsky, il tensoremetrico corrisponde:
&µ# =
'
((()
"1 0 0 00 1 0 00 0 1 00 0 0 1
*
+++, (A.4)
Allora la distanza tra due punti in uno spazio così fatto é semplicemente:
ds2 = &µ#dxµdx# = "c2dt2 + dx2 + dy2 + dz2 (A.5)
171

Dato che vale il Principio di Equivalenza, l’espressione eq. A.5 deve valereanche in un qualunque sistema di riferimento solo localmente inerziale.
L’equazione delle geodetiche
Abbiamo a!ermato che il Principio di Equivalenza pone un legame tra il campogravitazionale e la metrica dello spazio-tempo, espresso sotto forma di tensoremetrico. Esaminiamo ora meglio questo legame cercando l’equazione del moto diun corpo soggetto esclusivamente all’azione di un campo gravitazionale e osservatoin un sistema di riferimento arbitrario. Procediamo in questo modo: scriviamol’equazione del corpo in caduta libera in un sistema di riferimento inerziale e poi,tramite un cambio di coordinate, la generalizziamo ad un qualunque altro sistemadi riferimento.
Nel sistema di riferimento inerziale, ad esempio quello solidale con il moto delcorpo, lo spazio percorso è lo spazio proprio % e il tempo impiegato dalla particellaè il tempo proprio ' . Dato che non agiscono forze sul corpo in caduta liberae dato che vale il Principio di Equivalenza (mI = mG), l’equazione del moto èsemplicemente:
d2%!
d' 2= 0 (A.6)
Cambiando sistema di riferimento, si trovano delle leggi di trasformazione chepermettono il passaggio dalle coordinate x! alle coordinate %!, del tipo x! =x!(%!). Allora anche la distanza tra due punti nel nuovo sistema di riferimentocambia:
ds2 = &µ#(%µ
(x!dx! (%#
(x"dx" = g!"dx!dx" (A.7)
dove è stato definito come tensore metrico:
g!" = &µ#(%µ
(x!
(%#
(x"(A.8)
Nel nuovo sistema di riferimento si puó dimostrare che l’equazione del motodel corpo diventa:
d2x!
d' 2+
"(x!
(%(
(2%(
(xµ(x#
# "dxµ
d'
dx#
d'
#
= 0 (A.9)
e definendo i simboli di Christo!el:
"!µ# =
(x!
(%(
(2%(
(xµ(x#(A.10)
si ottiene l’equazione delle geodetiche:
d2x!
d' 2+ "!
µ#
"dxµ
d'
dx#
d'
#
= 0 (A.11)
172
che esprime il moto di un corpo in caduta libera in un sistema di riferimentoarbitrario. Da questa equazione si deduce che, grazie al Principio di Equivalenza,mettendosi in un sistema localmente inerziale, la forza gravitazionale non compare.Ma cambiando sistema di riferimento, compaiono sia l’interazione gravitazionaleche le altre forze apparenti, come ad esempio la forza di Coriolis o quella centrifuga.Il termine addizionale indicato mediate i simboli di Christo!el esprime proprio laforza gravitazionale per unità di massa.
Si può trovare, dal calcolo della derivata covariante del tensore metrico gµ# ,un’altra espressione per i simboli di Christo!el:
"!µ# =
1
2g!$(g$µ,# + g$#,µ " gµ#,$)1 (A.12)
Quindi i simboli di Christo!el, che rappresentano una generalizzazione del cam-po gravitazionale newtoniano, sono ricavabili tramite la conoscenza del tensoremetrico.
Il tensore di curvatura
Abbiamo visto come lo spazio-tempo si descriva compiutamente con il tensoremetrico. Ma dal tensore metrico è possibile definire un ulteriore tensore, dettotensore di curvatura o di Riemann, che indica la curvatura intrinseca, cioè lacurvatura misurabile da “qualcuno” che si muove sulla superficie dello spazio-tempostesso.
Per arrivare a esprimere questa quantità, si deve richiamare il concetto ditrasporto parallelo di un vettore lungo una curva.
Si prenda una curva C su uno spazio-tempo generico e un vettore "#v le cuicomponenti sono vµ: se i vettori "#v sono definiti per ogni punto della curva, sonoparalleli e di uguale modulo in punti infinitesimamente vicini lungo C, allora si puòdire che il vettore "#v è stato trasportato parallelamente lungo la curva.
Ora, quando si trasporta parallelamente un vettore lungo una curva chiusaD (ad esempio, un triangolo di vertici PQR), a seconda della curvatura dellospazio-tempo lungo cui è tracciata, si hanno risultati diversi:
• se siamo in uno spazio-tempo piatto, il vettore "#v , tracciato in ogni puntoparallelo al vettore della posizione precedente, ritorna in P parallelo a se’stesso;
1Con la notazione gµ" ,# si indica la derivata ordinaria:
gµ" ,# =#gµ"
#x#
Mentre con la notazione Tµ";$ si indica la derivata covariante del tensore Tµ" :
Tµ";$ = Tµ",$ " T%""%$µ " Tµ%"%
$"
173

• se siamo in uno spazio-tempo curvo, come è quello di una sfera, disegnandoogni volta il vettore "#v parallelo il più possibile al vettore del punto preceden-te, non si ritrova lo stesso vettore che si aveva inizialmente; ci sarà invece uncerto angolo tra i due vettori che si può calcolare dall’equazione del trasportoparallelo [1], come si vede in fig. A.1.
Figura A.1: trasporto parallelo di un vettore lungo un percorso tracciato su unospazio-tempo curvo.
Il tensore di Riemann si trova proprio da questo calcolo. La di!erenza tra ilvettore iniziale e quello finale $v/ è data da:
$v/ = $A ["/µ0,$ " "/
µ$,0 + "/#$"
#µ0 " "/
#0"#µ$]v
µ (A.13)
dove $A e’ l’area infinitesima racchiusa da D. Si definisce allora tensore di Rie-mann:
R/µ$0 = "/
µ0,$ " "/µ$,0 + "/
#$"#µ0 " "/
#0"#µ$ (A.14)
Ovviamente è poi possibile esprimere il tensore di Riemann con il tensore me-trico, sostituendo i simboli di Christo!el corrispondenti: appare evidente come iltensore di Riemann sia e!ettivamente in grado di caratterizzare la curvatura diuno spazio-tempo dato da una metrica. Così, ad esempio, in uno spazio-tempopiatto, il tensore di Riemann è nullo, come ci si poteva aspettare dal fatto che ilvettore trasportato coincide con quello iniziale.
Dal tensore di Riemann si ottiene quello di Ricci, contraendone gli indici:
R$( = R%$%( (A.15)
A sua volta questo tensore può essere contratto per ottenere lo scalare di Ricci:
R = g$(R$( (A.16)
Queste quantità sono utili nella derivazione delle equazioni di Einstein.
174
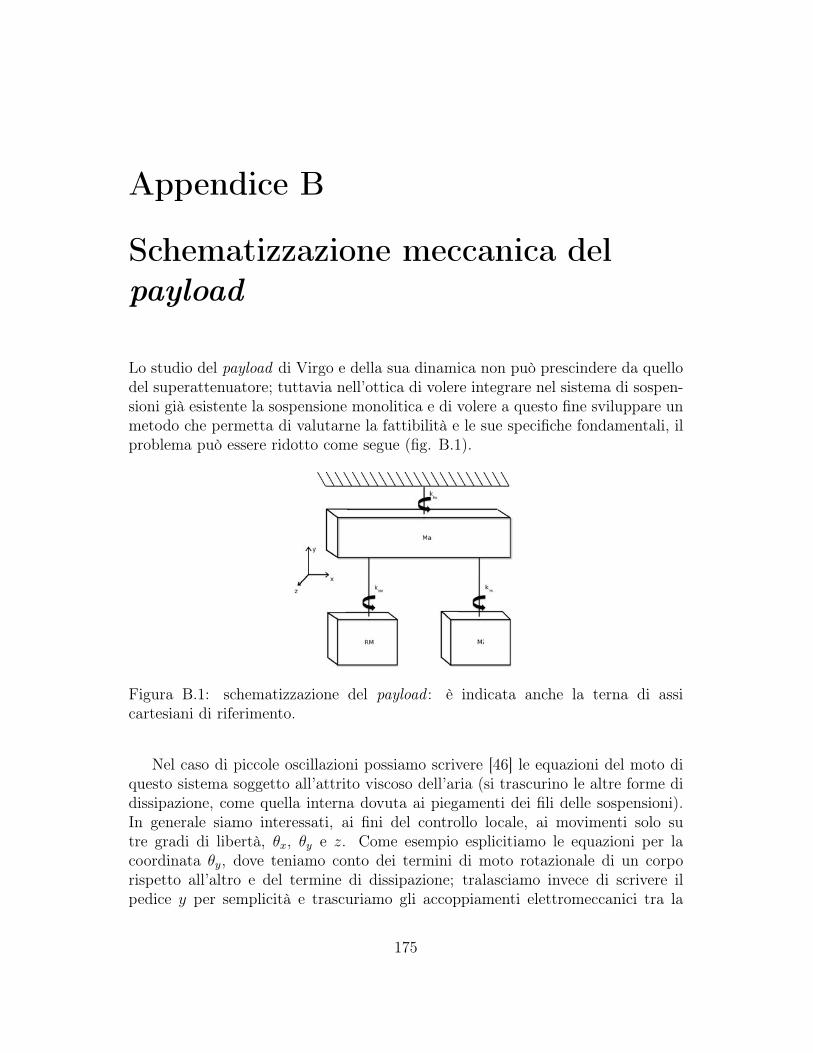
Appendice B
Schematizzazione meccanica delpayload
Lo studio del payload di Virgo e della sua dinamica non può prescindere da quellodel superattenuatore; tuttavia nell’ottica di volere integrare nel sistema di sospen-sioni già esistente la sospensione monolitica e di volere a questo fine sviluppare unmetodo che permetta di valutarne la fattibilità e le sue specifiche fondamentali, ilproblema può essere ridotto come segue (fig. B.1).
Figura B.1: schematizzazione del payload : è indicata anche la terna di assicartesiani di riferimento.
Nel caso di piccole oscillazioni possiamo scrivere [46] le equazioni del moto diquesto sistema soggetto all’attrito viscoso dell’aria (si trascurino le altre forme didissipazione, come quella interna dovuta ai piegamenti dei fili delle sospensioni).In generale siamo interessati, ai fini del controllo locale, ai movimenti solo sutre gradi di libertà, /x, /y e z. Come esempio esplicitiamo le equazioni per lacoordinata /y, dove teniamo conto dei termini di moto rotazionale di un corporispetto all’altro e del termine di dissipazione; tralasciamo invece di scrivere ilpedice y per semplicità e trascuriamo gli accoppiamenti elettromeccanici tra la
175

massa di reazione e lo specchio:BCD
CE
IMa/Ma + kMat /Ma + kRM
t (/Ma " /RM) + kMit (/Ma " /Mi) + 5Ma/Ma = 0
IRM /RM + kRMt (/RM " /Ma) + 5RM /RM = 0
IMi/Mi + kMit (/Mi " /Ma) + 5Mi/Mi = 0
(B.1)dove I è il momento d’inerzia dei vari corpi, calcolato rispetto all’asse y, 5 è il
coe"ciente di attrito viscoso dell’aria e kt è la costante elastica torsionale dei filiche sostengono i tre corpi:
kt = kls2
4=
EA
l
s2
4(B.2)
Si ricorda che s è la distanza tra i punti di attacco dei fili di sospensione e ilbaricentro del corpo e la costante elastica longitudinale kl vale:
kl =EA
l(B.3)
con A è la sezione del filo, l la sua lunghezza e E il solito modulo di Young.Si noti, inoltre, che nel caso semplice di un sistema con un solo grado di libertà,esso ruota intorno al suo asse con una frequenza dipendente dalla costante elasticatorsionale e dal suo momento d’inerzia [27]:
ft =1
2"
5kt
I(B.4)
Se si volessero scrivere le equazioni anche per gli altri gradi di libertà bastaprestare attenzione alle grandezze da considerare:
• per la rotazione /x si devono inserire i momenti d’inerzia calcolati rispettoall’asse x e le costanti elastiche dei punti di piegatura dei fili (eq. 2.56);
• per lo spostamento lungo z si devono mettere le masse, anziché i momentid’inerzia e ancora le costanti elastiche dei punti di piegatura dei fili (il moto/x e quello z sono infatti fortemente accoppiati);
• per lo spostamento lungo l’asse y si devono inserire le masse e i fili sonoapprossimabili a delle molle di costanti elastiche longitudinali (eq. B.3).
Il sistema di equazioni eq. B.1 può essere risolto algebricamente [45]. Si trova-no, per il grado di libertà scelto, tre frequenze fondamentali proprie dei tre motiche la marionetta, la massa di reazione e lo specchio compiono. Possiamo scriverlein forma compatta in questo modo, definendo delle quantità utili. Si ricordi che,x è la frequenza angolare del moto disaccoppiato per il corpo generico x, mentreMx ne è la massa:
a = "[,2Ma + ,2
RM(1 +MMa
MRM) + ,2
Mi(1 +MMi
MMa)]
176

b = ,2Ma(,
2RM + ,2
Mi) + ,2RM,2
Mi(1 +MRM
MMa+
MMi
MMa)]
c = ",2Ma,
2RM,2
Mi
Q =3b" a2
9, R =
9ab" 27c" 2a2
54, D = Q3 + R3,
S = (R +-
D)1/3, T = (R"-
D)1/3
Allora si ha:
+1 =
5
"1
2(S + T )" a
3+
1
2i-
3(S + T ) (B.5)
+1 =
5
"1
2(S + T )" a
3" 1
2i-
3(S + T ) (B.6)
+1 =A
(S + T )" a
3(B.7)
Queste tre frequenze corrispondono a diversi moti:
• Ma, RM e Mi si muovono insieme, in fase tra loro, eq. B.5: questo moto èquello di frequenza più bassa. Infatti dall’eq. B.4 possiamo rappresentare ilsistema come un unico corpo di momento d’inerzia complessivo dato dallasomma dei singoli momenti (fig. B.2(a)).
• Mi e RM si muovono in controfase tra loro, mentre Ma è ferma, eq. B.6; inparticolare il centro di massa di tutto il sistema resta fermo (fig. B.2(b)).
• Mi e RM si muovono in fase tra loro e in controfase rispetto a Ma, eq. B.7:questo è il moto a frequenza più alta. Infatti, in questo caso, il contributo del-la massa di reazione e dello specchio si sottraggono a quello della marionetta(fig. B.2(c)).
177
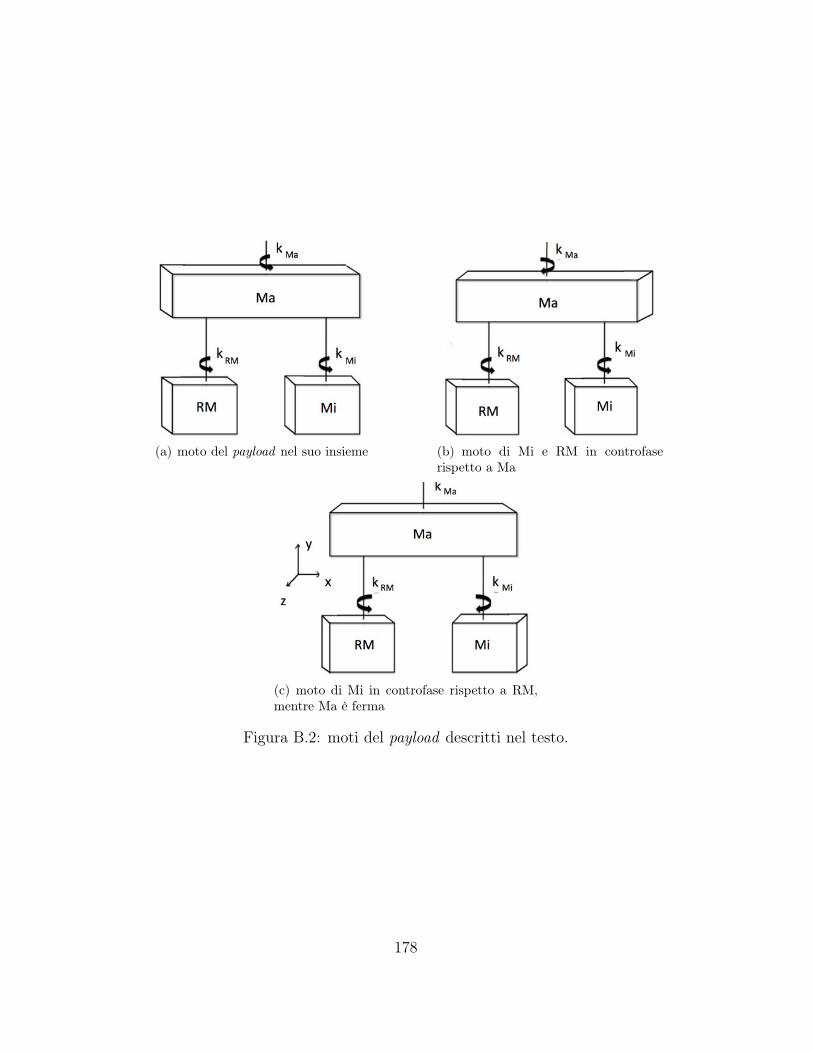
(a) moto del payload nel suo insieme (b) moto di Mi e RM in controfaserispetto a Ma
(c) moto di Mi in controfase rispetto a RM,mentre Ma è ferma
Figura B.2: moti del payload descritti nel testo.
178
Appendice C
Listato di configurazione delprocesso Gx Server
/*--- Configuration for the MS Test Facility ---*/
NAME MS
DEBUG 10/* VME memory address of the DSPs */
DPMEM2 0xe01c0000 /*control DSP*/
AUTOSTART
TIMING 0xe8e82100 50. 10000 500 REMOTE
PSD MS_PSDm 7 DOWN 0.1 70000 -11740. -11740. 0. 0. 0. 0.PSD MS_PSDi 49 UP 0.1 180000 1. 1. 0. 0. 0. 0.PSD MS_PSDf 49 DOWN 0.3 23000 1. 1. 0. 0. 0. 0.
CAMERA cam 30 350 0.0
SAVE_RAW_PSD
MARIONETTA_PSD MS_PSDm
/* name camera xf yf nx ny thrshold n_spots box_size xWaist yWaist lambda */ZONE MS_UL cam 92 108 40 34 45 9 20 0. 0. 0.ZONE MS_UR cam 364 117 28 22 45 9 20 0. 0. 0.ZONE MS_DL cam 104 415 32 28 35 9 20 0. 0. 0.ZONE MS_DR cam 372 397 28 26 40 9 20 0. 0. 0.
%// (Xleft*0.85-Xright)/2 *0.1514 // marker +%// REF COARSE -279. 0. 1273. 3480859 -3127628. 0. // marker xCOARSE MS_UL 1. 0. 0. 0. 419.36 0.
0. 0. 1. 1. 712.9 0.COARSE MS_UR 1. 0. 0. 0. -419.36 0.
0. 0. 1. 1. 0. 0.COARSE MS_DL 1. 0. 0. 0. 419.36. 0.
0. 0. 1. -1. 0. 0.COARSE MS_DR 1. 0. 0. 0. -419.36 0.
0. 0. 1. -1. 0. 0.
REF COARSE 0. 0. 0. -7000. -4786500. 0.
FINE MS_PSDf 200000. 0. 0. 10000.
179
0. -10000. 0.
FINE MS_PSDi 700000. 20000. 0. 0.0. 0. 0.
REF FINE 0. 0. 0. 0. 0. 0.
ITLEVEL 5
#ITDELAY 12.5e-3
DAC 3.9 0. 45000
BACKGROUND 5
FRAME_LIST_SIZE 5
FRAME Fbm15w
CFG_NOFILESAVECFG_PWD /virgoLog/GxS/
Esaminiamo ora le voci di maggiore interesse, con i parametri ad essi associati:• TIMING (cinque parametri): il numero di interfaccia della scheda TIM, la
frequenza a cui lavora la telecamera CCD, la frequenza a cui lavora il DSP,la frequenza a cui lavorano i PSD e lo stato della scheda stessa;
• PSD (nove parametri): il nome del PSD a cui si riferisce, il numero serialedella scheda ADC, la posizione dei canali nella scheda ADC, il valore diguardia (ovvero il diametro minimo espresso come frazione dell’area del PSDper selezionare il fascio laser), il valore minimo della potenza incidente sulPSD per la rivelazione, i fattori di guadagno da applicare alle coordinate xe y, e infine i valori di o!set da sommare alle coordinate x e y; # con talevoce si acquisiscono i dati provenienti dai fotodiodi;
• CAMERA (quattro parametri): il nome della telecamera, il numero di in-terfaccia della scheda CAM, il tempo di integrazione dell’immagine espressocome numero di righe (ogni riga corrisponde a un tempo di 32µs) e il fattoredi non-linearità del segnale di uscita della telecamera;
• ZONE (dieci parametri): il nome della zona, il nome della telecamera, ilvalore di partenza del pixel nella coordinata x e y, il numero di pixel daconsiderare nella direzione x e y, il valore limite per la determinazione di unpuntino del marker, il numero di puntini presenti per ogni marker, le dimen-sioni del quadrato per la ricerca dei marker (questo quadrato si può muovereall’interno dell’immagine); i restanti parametri non sono utilizzati nel nostroprototipo; # tale voce sancisce le aree dell’immagine della telecamera damisurare per l’individuazione dei marker ;
• COARSE (tredici parametri): il nome della zona, i fattori moltiplicativi daapplicare ai sei gradi di libertà nella direzione x e y; # tale voce assegna lamatrice di calcolo del segnale COARSE;
180
• FINE (otto parametri): il nome del PSD per cui si calcola, il valore minimodella potenza incidente per la rivelazione, i fattori moltiplicativi da applicareai gradi di libertà z, /x e /y nella direzione x e y; # tale voce assegna lamatrice di calcolo dei segnali FINE;
• REF (sette parametri): il nome del segnale a cui ci si riferisce (FINE, COAR-SE o TELEM, non usato nel nostro prototipo), i valori di o!set per i sei gradidi libertà;
• DAC (tre parametri): il valore della tensione di uscita della scheda DAC nellostato COARSE, il valore della tensione in uscita nello stato FINE e l’inter-vallo di tempo per definire una configurazione FINE stabile; # tale voceidentifica l’intervallo di tempo per passare dalla configurazione COARSE aquella FINE.
181
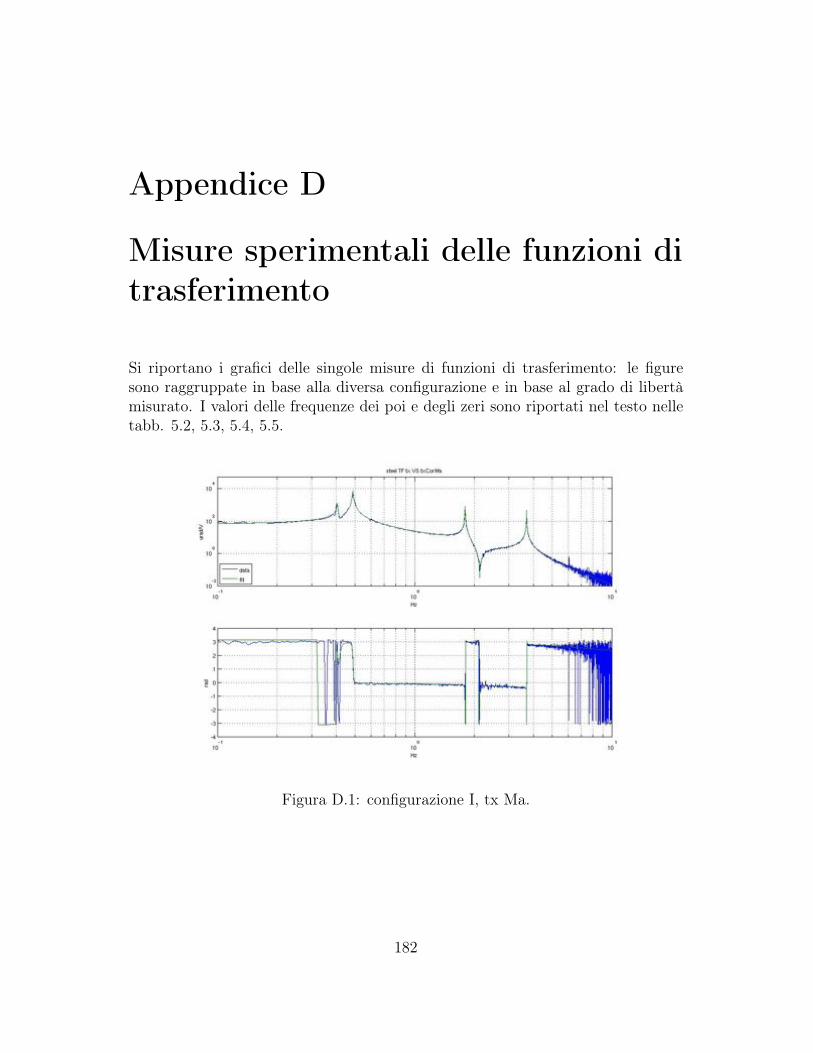
Appendice D
Misure sperimentali delle funzioni ditrasferimento
Si riportano i grafici delle singole misure di funzioni di trasferimento: le figuresono raggruppate in base alla diversa configurazione e in base al grado di libertàmisurato. I valori delle frequenze dei poi e degli zeri sono riportati nel testo nelletabb. 5.2, 5.3, 5.4, 5.5.
Figura D.1: configurazione I, tx Ma.
182
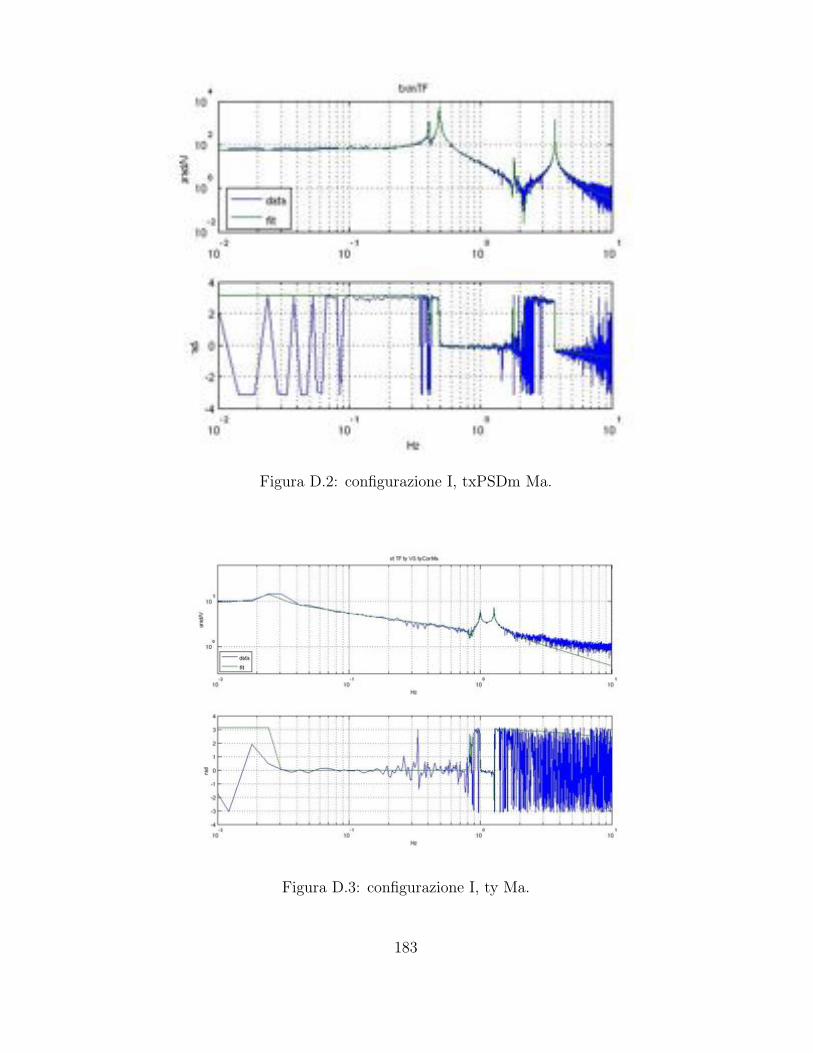
Figura D.2: configurazione I, txPSDm Ma.
Figura D.3: configurazione I, ty Ma.
183
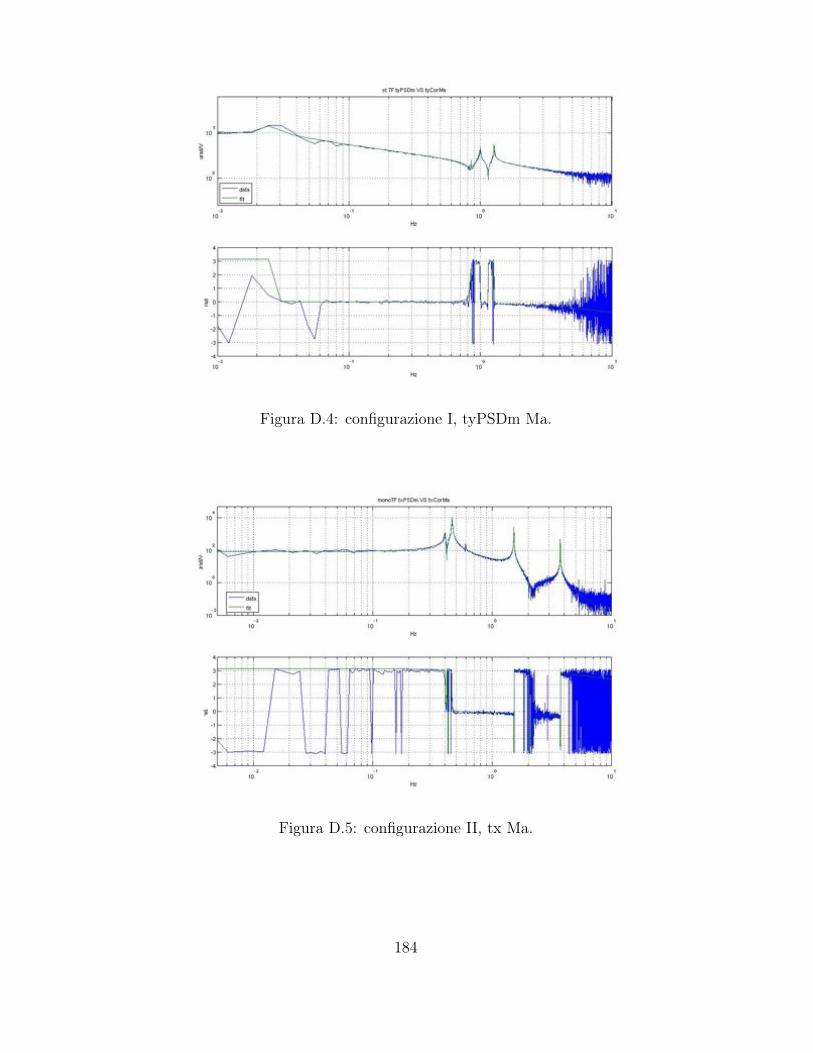
Figura D.4: configurazione I, tyPSDm Ma.
Figura D.5: configurazione II, tx Ma.
184
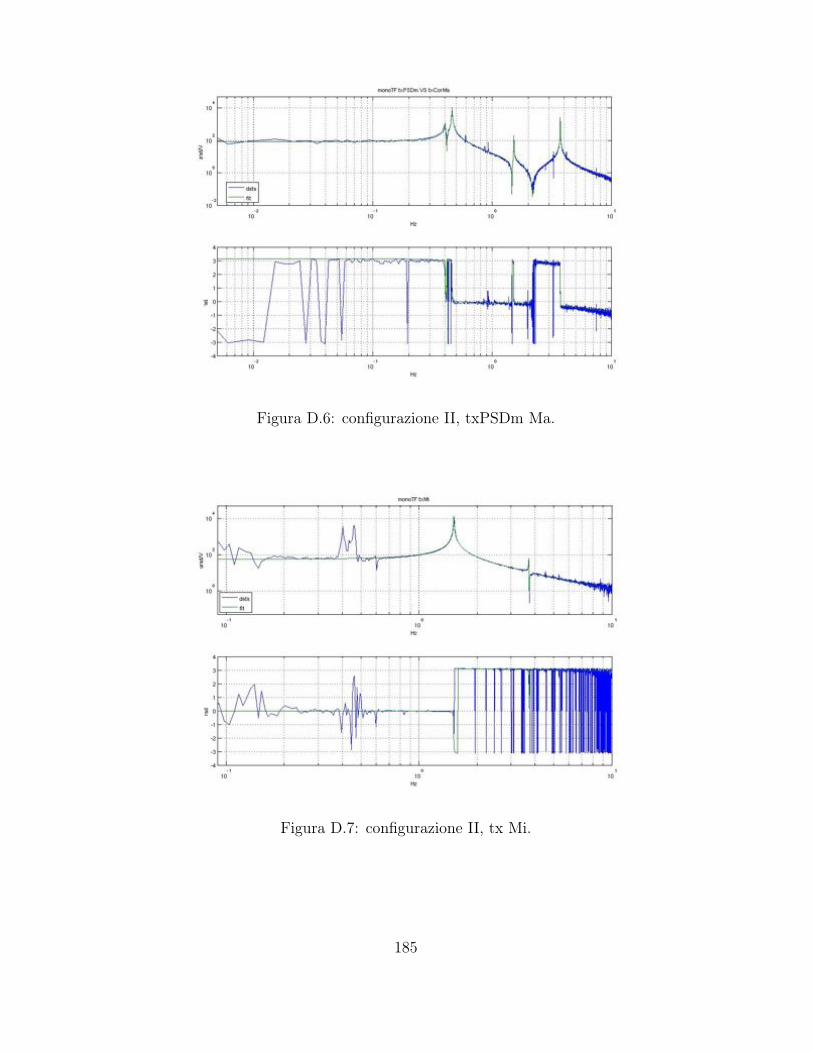
Figura D.6: configurazione II, txPSDm Ma.
Figura D.7: configurazione II, tx Mi.
185
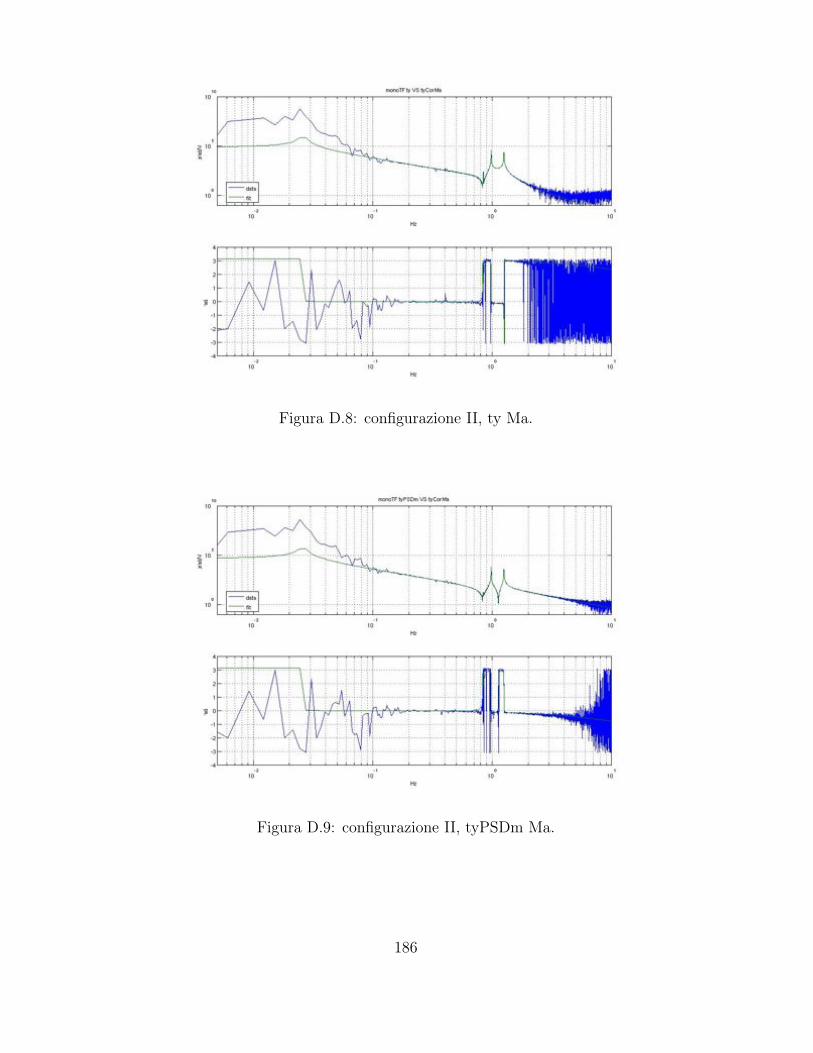
Figura D.8: configurazione II, ty Ma.
Figura D.9: configurazione II, tyPSDm Ma.
186
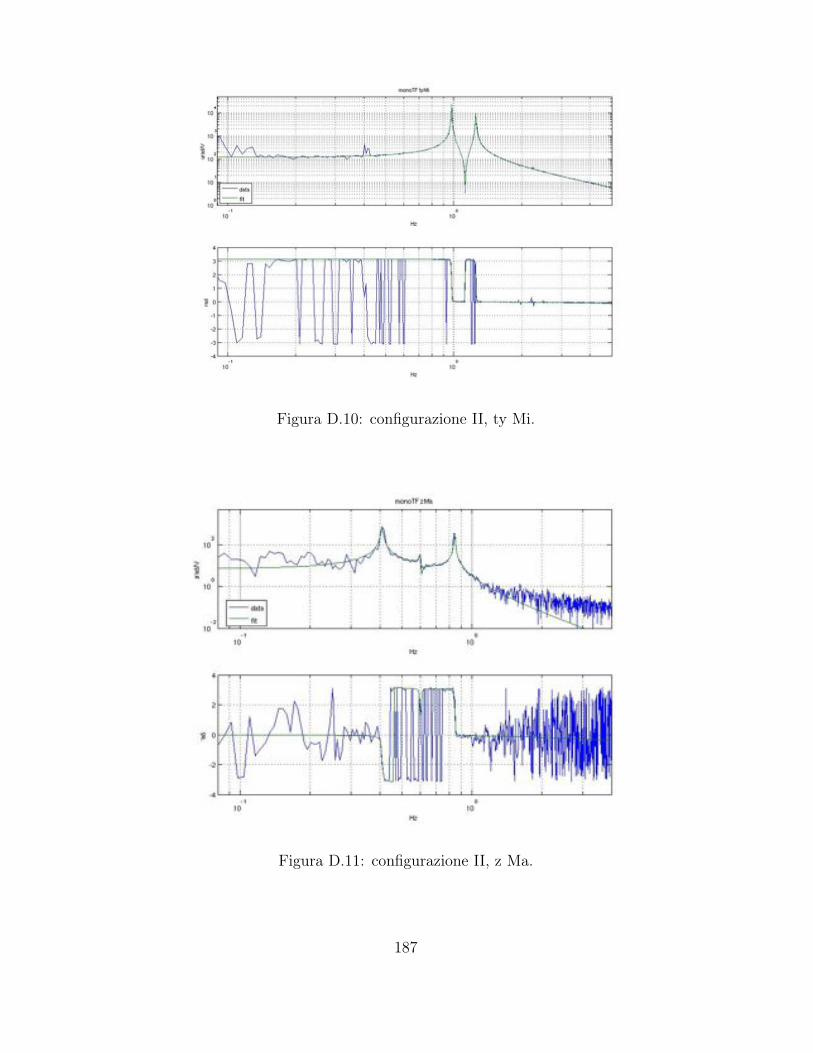
Figura D.10: configurazione II, ty Mi.
Figura D.11: configurazione II, z Ma.
187
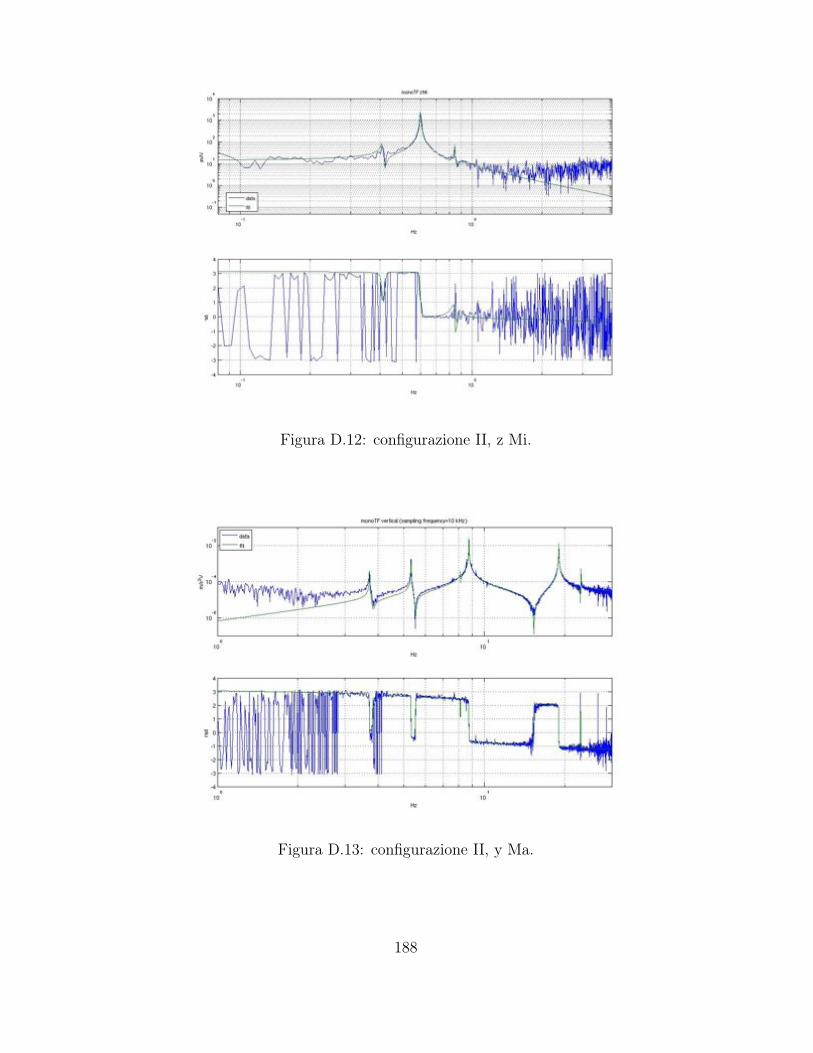
Figura D.12: configurazione II, z Mi.
Figura D.13: configurazione II, y Ma.
188
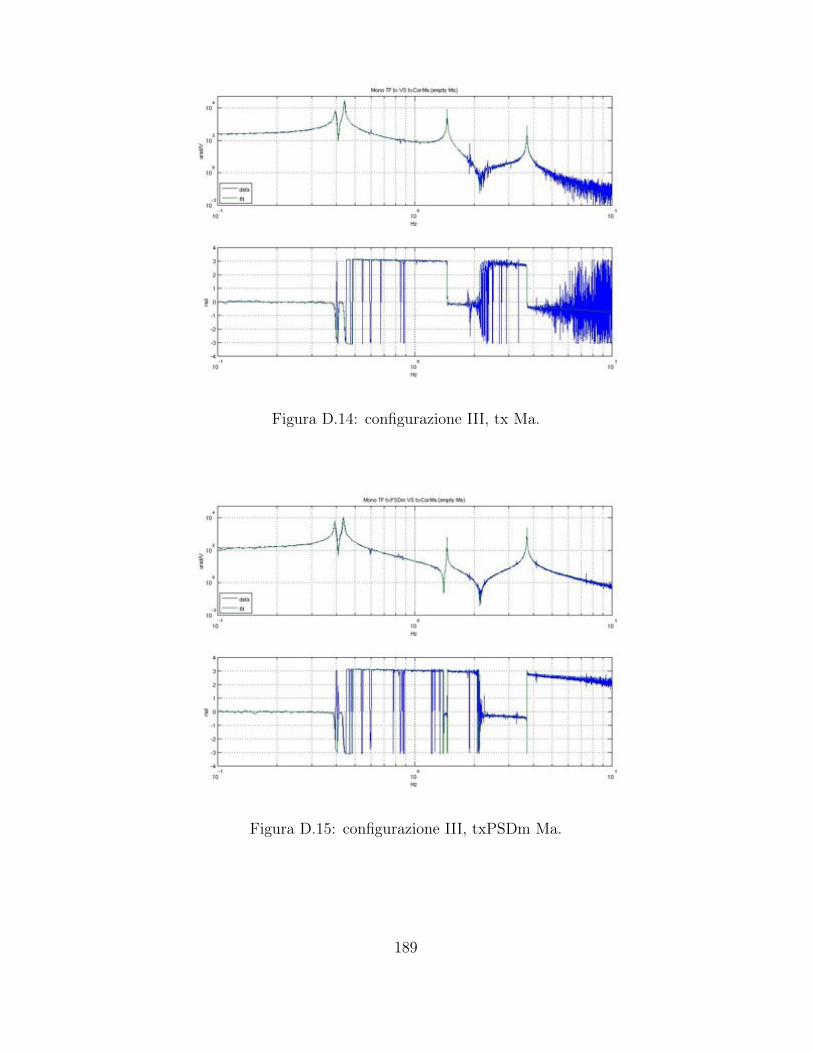
Figura D.14: configurazione III, tx Ma.
Figura D.15: configurazione III, txPSDm Ma.
189
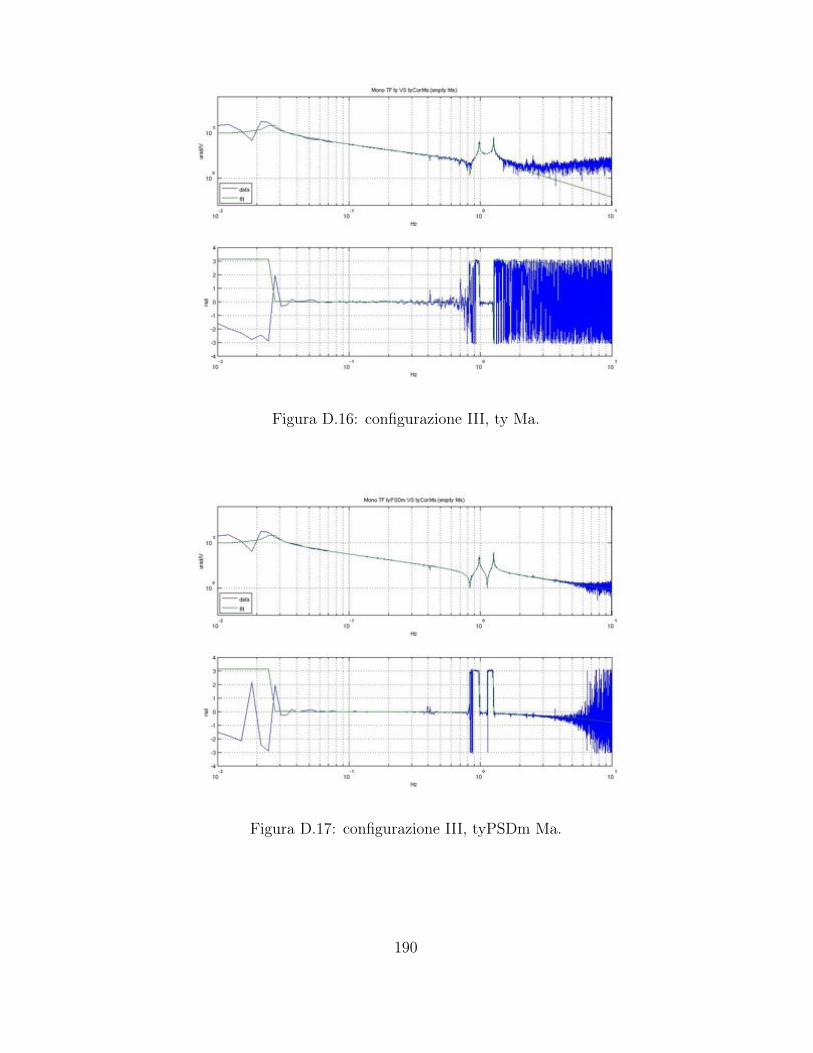
Figura D.16: configurazione III, ty Ma.
Figura D.17: configurazione III, tyPSDm Ma.
190
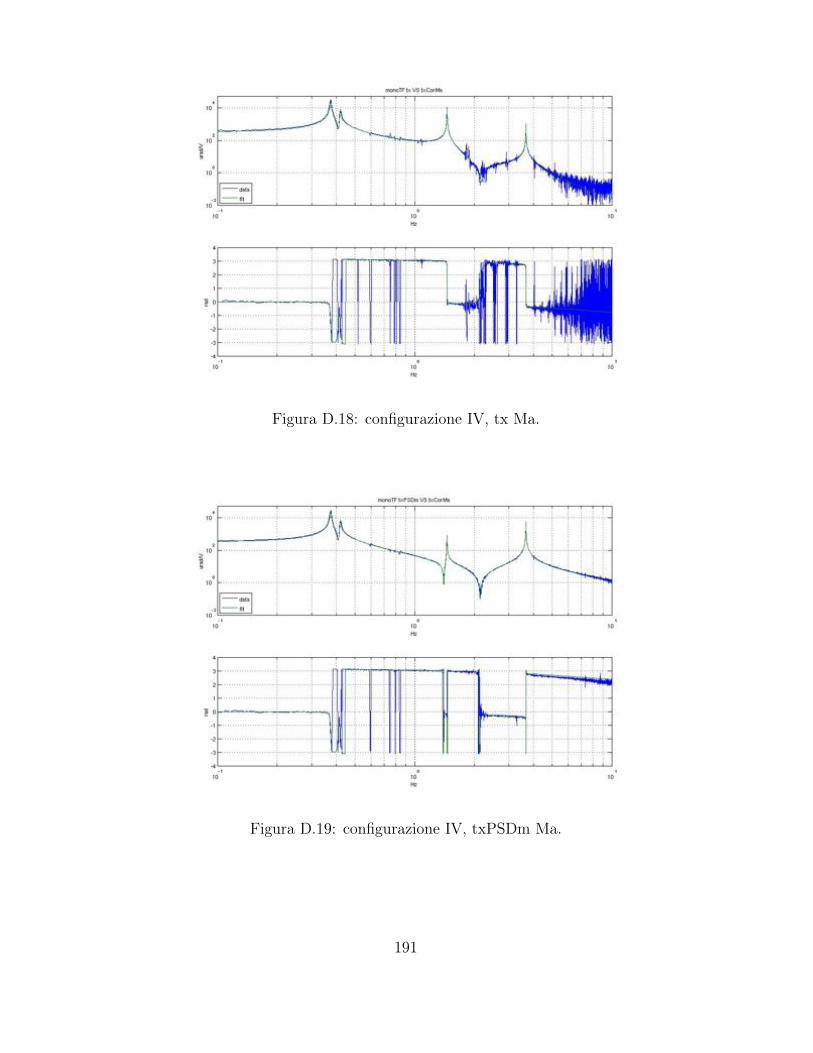
Figura D.18: configurazione IV, tx Ma.
Figura D.19: configurazione IV, txPSDm Ma.
191
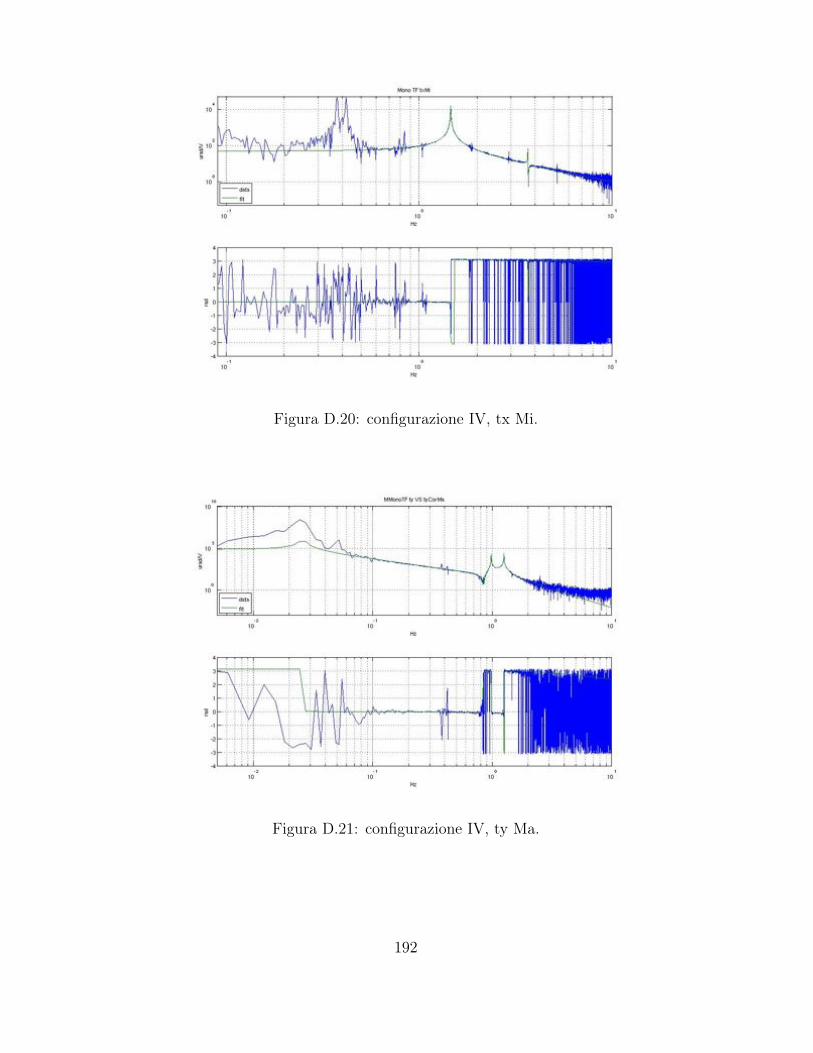
Figura D.20: configurazione IV, tx Mi.
Figura D.21: configurazione IV, ty Ma.
192
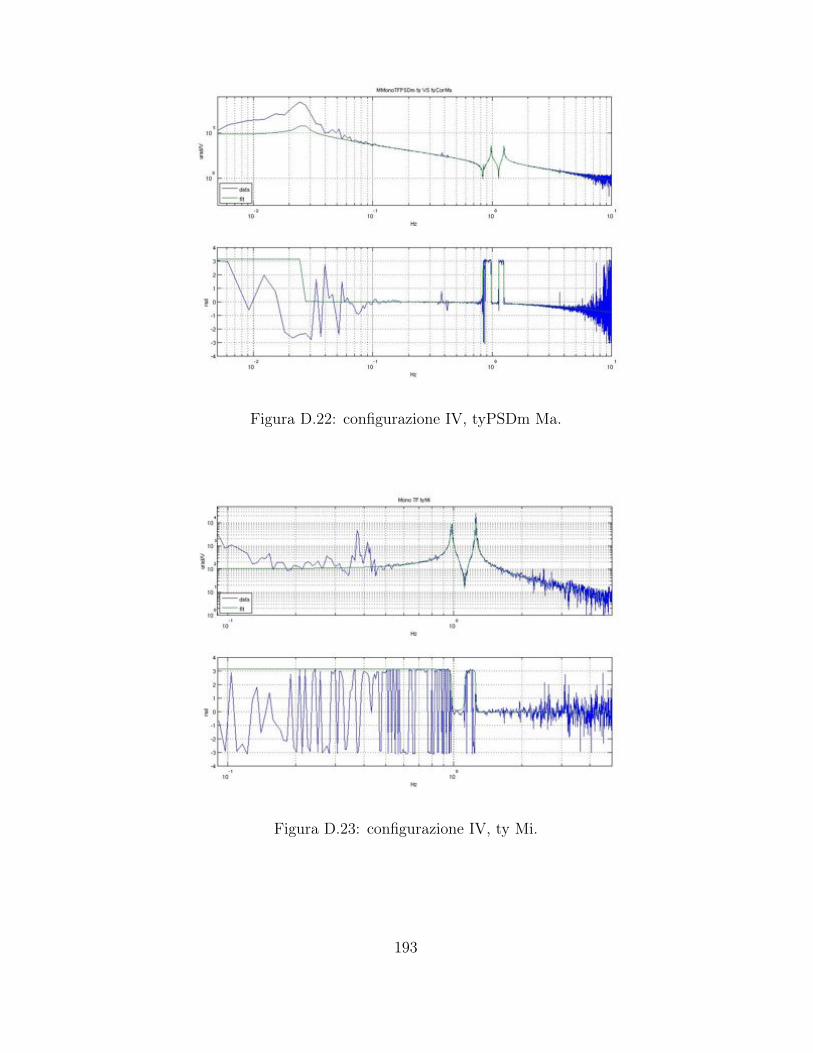
Figura D.22: configurazione IV, tyPSDm Ma.
Figura D.23: configurazione IV, ty Mi.
193
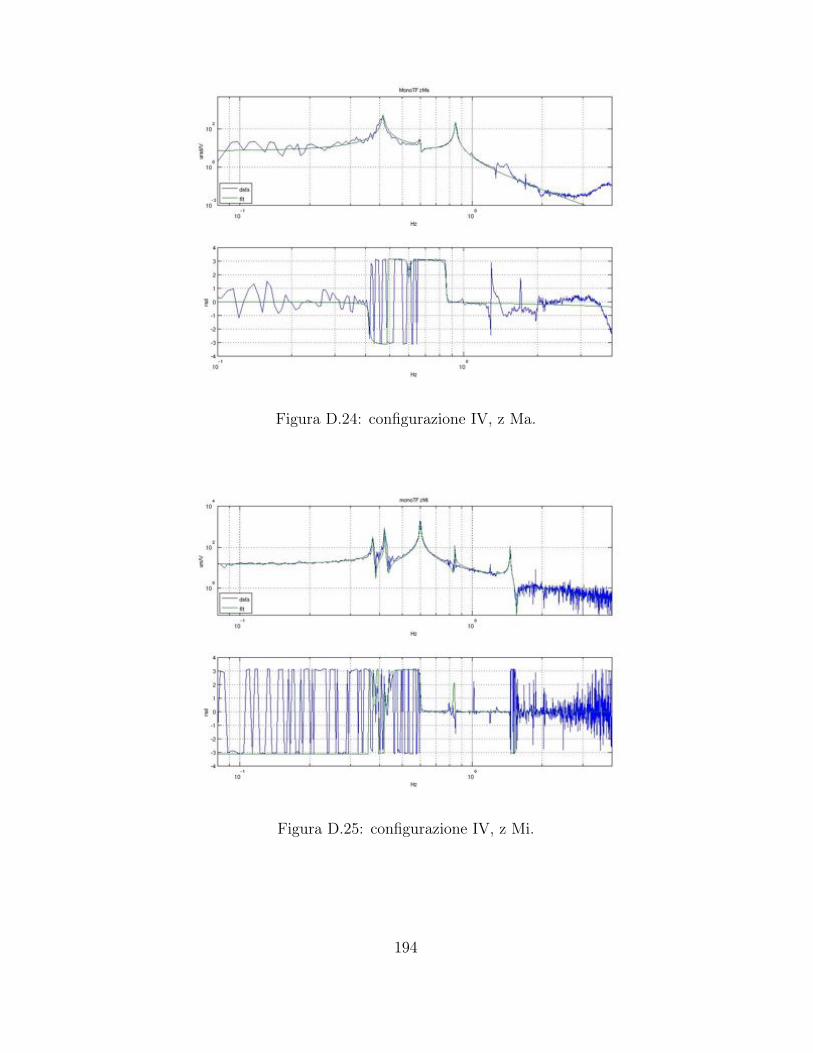
Figura D.24: configurazione IV, z Ma.
Figura D.25: configurazione IV, z Mi.
194
Bibliografia
[1] Schutz B. F., A first course in general relativity, Cambridge University Press,Cambridge, 1985.
[2] Ferrari V., Dispense di Relatività, Dipartimento di Fisica, Univerisità “La Sapienza”,Roma, 2004
[3] Camp J. B., Cornish N. J., Gravitational Wave Astronomy, Annual Review Nuclearand Particles Science, vol. 54, pp. 525-577, 2004
[4] Giannone P., Elementi di astronomia, Pitagora Editrice, Bologna, 1996
[5] Giannone P., Complementi di astrofisica stellare, Edizioni Nuova Cultura, Roma,2006
[6] Buonanno A., Cook G. B., Pretorius F., Physical Review D, vol. 75, pp. 124018,2007
[7] Kim C., Kalogera V., Lorimer D., astro-ph:0608280, A life with stars, a conferencein honour of Ed van den Heuvel, Amsterdam, 2005
[8] Belczynski K., Taam R. E., Kalogera V., Rasio F. A., Bulik T., astro-ph:0612032,The Astrophysical Journal, vol. 662, pp. 504-511, 2007
[9] Hulse, R. A., Taylor, J. H., The Astrophysical Journal, vol. 195, pp. L51-L53, 1975
[10] Taylor J.H., Weisberg J. M., The Astrophysical Journal, vol. 345, pp. 434-450, 1989
[11] Taylor J.H., Weisberg J. M., ASP Conference series, vol. 302, 2003
[12] Bulik T., Belczynski K., Prestwich A., astro-ph:0803.3516, submitted to TheAstrophysical Journal
[13] Grishchuk L. P., Astrophysical Update, pp. 281-310, 2004
[14] Virgo Collaboration, Advanced Virgo preliminary design, Virgo Internal Note, VIR-089A-08, 2008
[15] Ryden B., An introduction to cosmology, Addison Wesley, San Francisco, 2003
[16] Matone L., Tesi di dottorato, 1999
195
[17] Cavalier F., Tesi di dottorato, 2001
[18] Saulson P. R., Fundamentals of Interferometric Gravitational Wave Detectors,World Scientific, Singapore, 1994
[19] De Bernardis P., Tecniche sperimentali in astrofisica, Dipartimento di Fisica,Università “La Sapienza”, Roma, 2002
[20] De Bernardis P., Dispense del Laboratorio di astrofisica, Dipartimento di Fisica,Università “La Sapienza”, Roma, 2005
[21] Cella G., Cuoco E. et al, Classical and Quantum Gravity, vol. 15, pp. 3339-3362,1998
[22] Wiener N., Journal of Mathematical Physics, vol. 5, pp. 84-98, 1926
[23] Einstein A., Investigations on the Theory of the Brownian Movement, Dover, NewYork, 1956
[24] Callen H. B., Welton T. A., Physical Review, vol. 83, pp. 34-40, 1951
[25] Callen H. B., Greene R. F., Physical Review, vol. 86, pp. 702-710, 1952
[26] Greene R. F., Callen H. B., Physical Review, vol. 88, pp. 1387-1391, 1952
[27] Mencuccini C., Silvestrini V., Fisica I: meccanica e termodinamica, Liguori Editore,Napoli, 1987
[28] Landau L. D., Lifshitz E. M., Theory of elasticity, Pergamon, Oxford, 1970
[29] Majorana E., Ogawa Y., Physics Letters A, vol. 233, pp.162-168, 1997
[30] Saulson P. R., Physical Review D, vol. 42, pp. 2437- 2445, 1990
[31] Zener C., Physical Review D, vol. 52, pp. 230-235, 1937
[32] Yamamoto K., Tesi di dottorato, 2000
[33] Numata K., Tesi di laurea, 2002
[34] Bernardini A. et al, Physics Letters A, vol. 255, pp. 142-146, 1999
[35] Lee B. H., Ju L., Blair D. G., Physics Letters A, vol. 339, pp. 217-223, 2005
[36] http://lisa.esa.int/
[37] Barsuglia M., LAL 99-25, 1999
[38] Barsotti L., Tesi di dottorato, 2006
[39] Fritschel P. et al, Applied Optics, vol. 31, pp. 1412-1418, 1992
[40] Virgo Collaboration, Final Design Report, non pubblicato, 1997
196
[41] Flaminio R., Gouaty R., Tournefier E., Analysis of the sensitivity of the recycledinterferometer during C5, C6 and C7 run, Virgo internal note, VIR-NOT-LAP-1390-313, 2006
[42] Pound R. V., Review of Scientific Instrument, vol. 17, pp. 490-505, 1946
[43] Drever R. W. et al., Applied Physics B: Photophys. Laser Chem., vol. 31, pp. 97-105,1983
[44] Braccini S. et al, Review of Scientific Instrument, vol. 67, pp. 2899-2902, 1996
[45] Bernardini A., Majorana E., Puppo P., Rapagnani P., Ricci F.,Testi G., Review ofScientific Instrument, vol. 70, pp. 3463-3472, 1999
[46] Seto W. W., Theory and problems of mechanical vibrations, Scaum’s Outline Series,Mc Graw-Hill Book Company, New York, 1964
[47] Acernese F. et al., The automatic alignment system of Virgo interferometer, 42ndRencontres de Moriond: Gravitational Waves and Experimental Gravity, La Thuille,Italy, 2007
[48] Acernese F. et al., Astroparticle Physics, vol. 20, pp. 617-628, 2004
[49] Anderson D. Z., Applied Optics, vol. 23, pp. 2944-2949, 1984
[50] Morrison E. et al, Applied Optics, vol. 33, pp. 8041, 1994
[51] Punturo M., The Virgo sensitivity curve, Virgo Internal Note, VIR-NOT-PER-1390-51, 2004
[52] Braginsky V. B., Gorodetsky M. L., Vyatchanin S. P., Physics Letters A, vol. 264,pp. 1-10, 1999
[53] Traeger S., Willke B., Danzmann K., Physics Letters A, vol. 225, pp. 39-44, 1997
[54] Cagnoli G., Gammaitoni L., Hough J., Kovalik J., McIntosh S., Punturo M., RowanS., Physical Review Letters, vol. 85, pp. 2442-2445, 2000
[55] Cagnoli G., Hough J., DeBra D., Fejer M.M., Gustafson E., Rowan S., MitrofanovV., Physical Letters A, vol. 272, pp. 39-45, 2000.
[56] Lorenzini M., Tesi di dottorato, 2007
[57] Mackenzie C. K. et al, Journal of Material Science, vol. 26, pp. 763-768, 1991
[58] Smith J. R., Cagnoli G., Crooks D. R. M., Fejer M. M., Gobler S., Luck H.,Danzmann K., Hough J., Rowan S., Classical and Quantum Gravity, vol. 21, pp.S1091-1098, 2004
[59] http://jp.hamamatsu.com/en/index.html
197
[60] Chollet F., Flaminio R., Hamdami S., Heitmann H., Majorana E., Masserot A.,Mours B., Tournefier E., The Camera Server Software (Gx Server), Virgo InternalNote, VIR-LIS-LAP-5200-106, 2007
[61] Frasca S., Analisi dei segnali, Dipartimento di Fisica, Università “La Sapienza”,Roma, 2008
[62] Pallottino G. V., Appunti di elettronica, Dipartimento di Fisica, Università “LaSapienza”, Roma, 2007
[63] Phillips C. L., Harbor R. D., Feedback Control Systems, International Edition, NewYork, 2000
[64] D’Agostini G., Introduzione all’elaborazione statistica dei dati sperimentali,Dipartimento di Fisica, Università “La Sapienza”, Roma, 1999
[65] Cowan G., Physics Letters B, vol. 667, pp. 320-329, 2008
[66] Alessio M., Improta S., Appunti dalle lezioni di esperimentazione fisica: statistica-parte III, Dipartimento di Fisica, Università “La Sapienza”, Roma, 1983
[67] Ruggi P., Tesi di laurea, Pisa, 2003
[68] Perciballi M., servizio di progettazione meccanica INFN Roma
198
Ringrazio ...
Ettore, per essere stato disponibile e a!dabile esattamente come mio padre
Paolo, per le tue spiegazioni chiare ed esaurienti: arrivavano sempre quando ne avevobisogno
Piero, per i racconti di fantascienza e Filippo, per i tuoi racconti di viaggi al limite delpossibile che rallegravano le cene da Antonio
Perci (!!!), per la tua indispensabile presenza e accortezza; come sarei potuta sopravvi-vere altrimenti a 1500W?
Federica e Alessandra, persone su cui contare nei dolorosi momenti qui nel loculo (loscambio di cibo è stato essenziale)
Fulvio, il capo, anzi il Capo, anzi il Capo Supremo il cui sesto senso mi ha colta più diuna volta in fallo
Paola, con la tua presenza e gli incoraggiamenti mi hai dato uno stimolo ad andaresempre avanti
papà: grazie per avermi così ben nutrita ogni volta che tornavo stanca e a"amata dallapiscina!
mamma: la tua pazienza e la tua dolcezza non saranno mai abbastanza ringraziate!
Claudia, la migliore sorella a cui potevo anelare...
Enrico, per “aver reso il venire a Virgo così leggero”
tutte le persone che lavorano a Virgo, quelle che hanno avuto una parola buona perme e quelle che hanno saputo criticarmi, quelle che hanno dato il loro contributoa risolvere i miei enormi problemi tecnici quando ero abbandonata a me stessa equelli che mi hanno regalato anche solo una risata
Antonella, la Lori, Romina, Titti, Giorgina, il vero zoccolo duro del turno 8,20-9,20,per aver blastato il genere maschile così tante volte tutte insieme (ma che turnosfigato, cacchio!)
Massimo, per i continui battibbecchi e frecciatine che, almeno, mi facevano passare iltempo
199
Francesco (“mamma”) e Andrea (“papà”), per essere stati due compagni di studio magni-fici e per aver assecondato tutte le mie puntigliosità e le mie relazioni di laboratorio
Margherita, Angelo, Antonio, la Grande Cozza, Massimigliano, Simone, Mozzarellone,Nino, Pokemon, Pelatone, Filippo, Fufino, per aver diviso con me le gioie e i doloridi cinque (e più!) anni di corso
Francesca “Bocchins”, insospettabile amica, vicina nelle faccende più intime: mi faràsempre piacere ascoltarti e aiutarti!
Emi cara, per avermi sempre chiesto se potevi venire a disturbare
Daniele Dumbo, teorico convinto, amico sincero, buono fino al parossismo, idealistapuro, insomma, tutto ciò di positivo che potete pensare, lui ce l’ha! Ma non scordoil due di picche che mi hai rifilato!
Danilo, per avermi messa nelle mani dell’uomo più bastian contrario che conosca, peravermi consolata quando piangevo, per avermi presa a schia! quando lo meritavo,per avermi aperto gli occhi quando non ne avevo voglia: a volte sei troppo convinto,ma ti voglio bene lo stesso!
Faccins, Ingg, Malvest, Cap, Andrea, Gozzilla, Micol, Marcello, i “fancazzisti”, e ancoraAlex, Mao, Elisa, Boto e Leiba, tutti insostituibili compagni di divertimento, trarisate e bevute: rimarranno storiche le nostre disavventure e le interminabili partitea carte!
Yari, spalla su cui mi appoggio e che si appoggia a me, ti assicuro che la troverai ladonna della tua vita.
e infine
Alex: mi hai insegnato più di quanto questi anni abbiano fatto, con te sono cresciuta,cambiata, con te ho capito delle cose a cui non avrei neanche pensato altrimenti,mi hai dato più di qualunque altra persona, tu lo sai bene. E anche se ora siamosolo “conoscenti intimi”, non ci sono parole che esprimono quello che provo... solobaci! (non pensare di scampartela! stasera lavi i piatti!)
200

![Untitled - 1 [people.na.infn.it]people.na.infn.it/~velotta/materiale didattico/integrazioni/induzione_1... · 23.1 LEGGE DI FARADAY DELL'INDUZIONE Inizieremo descrivendo due semplici](https://static.fdocumenti.com/doc/165x107/5f99f8e270b5203bd06ce8f6/untitled-1-velottamateriale-didatticointegrazioniinduzione1-231.jpg)