traslarispettoad conunacertavelocità VD'altra parte, nel vuoto, la soluzione generale delle...
26
= m v 0 x = v x - V V x O 0 O 0 O V
Transcript of traslarispettoad conunacertavelocità VD'altra parte, nel vuoto, la soluzione generale delle...
-
Guido CorbòNote di relatività
Generalità
Il principio di relatività di Einstein consiste nell'a�ermare che le leggi della�sica sono le stesse in qualsiasi sistema di riferimento inerziale. Ciò implical'impossibilità di privilegiare un particolare sistema di riferimento inerzialerispetto ad un altro. Le leggi della meccanica classica, contenute nell'equazione
f = ma
sono e�ettivamente invarianti nel passaggio da un sistema inerziale ad un altro,se si assumono le trasformazioni di Galileo.
Invece, le equazioni di Maxwell non sono invarianti sotto trasformazioni diGalileo. Infatti, da tali trasformazioni si ricava la legge classica di composizionedelle velocità. Per esempio
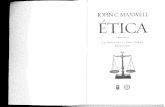
v′x = vx − V (1)se V è (l'unica) componente della velocità con la quale trasla, lungo l'asse x, ilriferimento O′ (�gura 1).
x
y
z
Ox'
z'
y'
O'
V
Figura 1: Il sistema O′ trasla rispetto ad O con una certa velocità V .
1
-
D'altra parte, nel vuoto, la soluzione generale delle equazioni di Maxwellper una propagazione lungo l'asse x è
Φ = f(x− ct) + g(x + ct) (2)
cioè una propagazione con velocità isotropa; ovvero con la stessa velocità tantonel verso delle x crescenti quanto in quello delle x decrescenti. Secondo letrasformazioni di Galileo, in un nuovo riferimento O′ avremmo due velocitàdiverse per la propagazione in un senso e nell'altro; ma ciò signi�cherebbe chel'equazione d'onda dovrebbe avere una struttura diversa nel nuovo riferimento,in contraddizione con il principio di relatività. Non rimane che ammettere chela velocità della luce sia un invariante rispetto alle trasformazioni da un sistemainerziale ad un altro.
La richiesta che la velocità della luce sia un'invariante impone la condizioneche si abbia, per il fronte di un'onda luminosa:
x2 + y2 + z2 = c2t2 (3)
x′2 + y′2 + z′2 = c2t′2 (4)
Per semplicità, possiamo de�nire
x0 = ct x′0 = ct′ (5)
x0 ha dunque le stesse dimensioni �siche delle altre variabili x, y e z (quelle diuna lunghezza) e possiamo quindi scrivere le (3) e (4) come
x2 + y2 + z2 = x02 (6)
x′2 + y′2 + z′2 = x′02
La relazione più semplice possibile, tra vecchie e nuove coordinate, è unarelazione lineare; dunque possiamo ipotizzare che, per un moto traslatorio lungol'asse x, le coordinate y e z restino immutate e che si abbia dunque:
y′ = y (7)z′ = z
x′ = αx + βx0
x′0 = γx + δx0
2
-
Sostituendo nella seconda delle (6) si ottiene:
(αx + βx0)2 + y′2 + z′2 = (γx + δx0)2 (8)
Sviluppando:
α2x2 + β2x02+ 2αβxx0 + y2 + z2 = (γ2x2 + δ2x0
2+ 2γδxx0) (9)
D'altra parte, deve essere x2+y2+z2 = x02; e dunque si deve avere identicamente
α2 − γ2 = 1 (10)δ2 − β2 = 1
αβ − γδ = 0
Possiamo allora utilizzare la seguente parametrizzazione:
α = cosh ξ γ = sinh ξ (11)δ = cosh ϕ β = sinh ϕ
La terza delle (10) mostra che ξ = ϕ; dunque abbiamo:
x′ = x cosh ϕ + x0 sinh ϕ (12)x′0 = x sinh ϕ + x0 cosh ϕ
Possiamo ricavare il signi�cato �sico della quantità ϕ. Infatti, se l'origine O′ delsistema di assi (cioè x′ = 0) trasla di moto rettilineo uniforme con una velocitàche ha soltanto componente lungo l'asse x pari a V deve essere, per ogni t
0 = V t cosh ϕ + ct sinh ϕ (13)
ovverotanh ϕ =
sinh ϕ
cosh ϕ= −V
c(14)
Da questa si ricava (osserviamo che cosh ϕ è sempre positivo):
cosh ϕ =1√
1− V 2/c2sinh ϕ =
−V/c√1− V 2/c2
(15)
3
-
In de�nitiva, possiamo scrivere così le relazioni tra i due sistemi di coordinate,che vengono chiamate trasformazioni di Lorentz:
x′ =x− V t√1− V 2/c2
(16)
y′ = y
z′ = z
t′ =t− (V/c2)x√
1− V 2/c2
È molto utile introdurre una nuova notazione per le coordinate spaziali.Precisamente, ponendo un indice in alto:
x ≡ x1 y ≡ x2 z ≡ x3 (17)
scriviamo così le trasformazioni di Lorentz:
x′1 =x1 − βx0√
1− β2 (18)x′2 = x2
x′3 = x3
x′0 =x0 − βx1√
1− β2
dove abbiamo postoβ =
V
c(19)
È utile anche porre questa de�nizione:
γ =1√
1− β2 (20)
e scrivere le trasformazioni di Lorentz in questo modo:
x′1 = (x1 − βx0)γ (21)x′2 = x2
x′3 = x3
x′0 = (x0 − βx1)γ
4
-
Contrazione di Lorentz
Le trasformazioni di Lorentz implicano l'esistenza di fenomeni che non sonoprevisti dalla meccanica galileiana. Uno di tali fenomeni è conosciuto comecontrazione di Lorentz o contrazione delle lunghezze. Vediamo di cosa si tratta.In meccanica galileiana, la lunghezza di un segmento, per esempio la lunghezzadi una sbarra rigida, è una quantità assoluta; nel senso che qualsiasi osservatore,che intenda misurarla, trova sempre lo stesso valore l0.
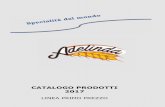
È ovvio che cosa si intenda per misura di una sbarra che è a riposo rispettoad un osservatore: questi sovrappone alla sbarra una riga graduata che consentela valutazione della misura (�gura 2).
x
y
z
Ox'
z'
y'
O'
V
x'A x'B
l0
Figura 2: Una sbarra è ferma nel riferimento O′.
Per un osservatore solidale ad O, rispetto al quale la sbarra è dunque inmovimento, l'operazione da eseguire è, in linea di principio, la seguente: eglideve �marcare� nello stesso istante la posizione dei due estremi della sbarrache gli scorre davanti; e successivamente misurare la distanza tra tali posizioni.Ci aspettiamo che il risultato sia ancora l0. Le cose vanno e�ettivamente cosìin meccanica galileiana ma vanno diversamente dal punto di vista relativistico.Supponiamo infatti che, come è illustrato nella �gura precedente, la sbarra siaposta lungo l'asse delle ascisse e trasli lungo tale asse con velocità V rispetto adun osservatore solidale ad O. La relazione tra le coordinate di O e quelle di O′,
5
-
che �segue� la sbarra, è data dalle trasformazioni di Lorentz; in particolare
x′ =x− V t√
1− V 2/c2(22)
Per le posizioni degli estremi A e B della sbarra devono valere evidentemente
x′A =xA − V tA√1− V 2/c2
x′B =xB − V tB√1− V 2/c2
(23)
dove tA e tB sono gli istanti nei quali viene rilevata da O la posizione dei dueestremi, rispettivamente. Sottraendo membro a membro si ha
x′B − x′A =xB − xA − V (tB − tA)√
1− V 2/c2(24)
Il primo membro è la lunghezza l0 della sbarra a riposo in O′; d'altra parte,xB − xA , che �gura al secondo membro, può essere interpretata come lunghezzal della sbarra misurata in O se in tale riferimento la misura è eseguita, comeabbiamo già notato, nello stesso istante per i due estremi; cioè tB = tA. Da ciòrisulta
l0 =l√
1− V 2/c2ovvero l = l0
√1− V 2/c2 (25)
In altre parole, vista da O, la sbarra risulta contratta della quantità√
1− V 2/c2.Arriviamo allo stesso risultato anche se de�niamo la lunghezza l della sbarra
in movimento in altro modo. Precisamente, possiamo pensare di misurare iltempo che trascorre tra il passaggio dei due estremi della sbarra per uno stessopunto del riferimento O; e poi moltiplicare tale intervallo di tempo per la velocitàV con la quale scorre la sbarra. Riferendoci ancora alla (24), poniamo xB = xAe otteniamo
l0 = x′B − x′A =
−V (tB − tA)√1− V 2/c2
(26)
dalla quale otteniamotB − tA = − l0
V
√1− V 2/c2 (27)
(notiamo che se per esempio V > 0, come nelle �gure precedenti, tB − tA risultanegativo: giustamente, l'estremo A passa davanti all'osservatore dopo l'estremoB). Dalla (27) otteniamo dunque
| V (tB − tA) | = l0√
1− V 2/c2 (28)
6
-
che coincide con la (25).
Dilatazione dei tempi
In meccanica galileiana, ci aspettiamo che la durata di un certo fenomenosia una quantità assoluta, indipendente dal sistema di riferimento. Ma, anche inquesto caso, la relatività porta ad un nuovo risultato. Precisamente, immaginiamoche il fenomeno in questione sia l'accensione di una lampadina ad un certo istantetA e il successivo spegnimento ad un istante tB, con la lampadina ferma nelsistema di riferimento O. Per quanto tempo rimane accesa la lampadina, perun osservatore O′ che trasla con velocità V ? Lo vediamo, come sempre, dalletrasformazioni di Lorentz. In particolare, da
t′ =t− (V/c2) x√
1− V 2/c2(29)
Per l'istante di accensione e quello dello spegnimento valgono evidentemente
t′A =tA − (V/c2) xA√
1− V 2/c2t′B =
tB − (V/c2) xB√1− V 2/c2
(30)
Sottraendo membro a membro:
t′B − t′A =tB − tA − (V/c2) (xB − xA)√
1− V 2/c2(31)
Al primo membro compare la durata T ′ del fenomeno misurata da O′; al secondomembro compare la durata T = tB − tA per il sistema nel quale, d'altra parte, lalampadina è ferma in una certa posizione: xB = xA . Dunque
T ′ =T√
1− V 2/c2(32)
ovvero, per l'osservatore in movimento rispetto alla lampadina, l'intervallo ditempo risulta dilatato della quantità
1√1− V 2/c2
(33)
7
-
L'intervallo di tempo (in�nitesimo) misurato tra due eventi che avvengononello stesso punto dello spazio (tridimensionale) viene chiamato intervallo ditempo proprio tra tali eventi e viene indicato con il simbolo dτ . In un genericosistema di riferimento risulta quindi:
dt = γdτ (34)
Due gemelli non sono coetanei!
Supponiamo che un ipotetico astronauta compia un lungo viaggio spazialee poi torni sulla Terra, dove lo ha aspettato suo fratello gemello. Al momentodella partenza, i due hanno evidentemente la stessa età. Che età avranno quandosi incontrano di nuovo sulla Terra? Per l'astronauta è passato un tempo
Ta =∫ τ2
τ1dτ = τ2 − τ1 (35)
Per il gemello sulla Terra è passato il tempo
TT =∫ t2
t1dt =
∫ τ2τ1
γ dτ >∫ τ2
τ1dτ = Ta (36)
poiché γ > 1. Ciò signi�ca che Ta < TT ovvero che l'astronauta è invecchiatomeno del fratello.
Composizione delle velocità
Dalle trasformazioni di Lorentz si ricava facilmente la legge di composizionerelativistica delle velocità. Per semplicità riferiamoci alla sola componente x. Perincrementi in�nitesimi delle coordinate spazio-temporali, si ha:
dx′ =dx− V dt√1− V 2/c2
(37)
dt′ =dt− (V/c2) dx√
1− V 2/c2(38)
8
-
Dividendo membro a membro per dt′:
v′x =dx′
dt′=
dx− V dtdt− (V/c2) dx (39)
E dividendo per dt numeratore e denominatore:
v′x =dx′
dt′=
vx − V1− (V/c2) vx (40)
Si vede che, nel limite di traslazioni a piccola velocità rispetto a quella dellaluce, la legge di composizione relativistica diventa quella galileiana.
Come semplice esercizio, possiamo veri�care che la relazione precedenteconferma l'invarianza della velocità della luce. Ponendo infatti vx = c si ha:
c′ =c− V
1− (V/c2)c = c (41)
È inoltre semplice vedere che la composizione di due velocità inferiori a quelladella luce fornisce una velocità anch'essa inferiore a quella della luce. Basta perquesto dimostrare che si ha comunque
v′x =vx − V
1− (V/c2) vx < c (42)
per qualsiasi valore di vx e V (purché entrambe minori di c). La disuguaglianzaprecedente si può scrivere infatti
vx − V < c− Vc
vx (43)
ovverovx(1 + V/c) < c (1 + V/c) (44)
che è sicuramente vera dal momento che vx < c.
Quadrivettori
Possiamo pensare alle x, y, z e ct come alle componenti xµ del raggio vettorein uno spazio a quattro dimensioni che viene chiamato spazio di Minkowski.
9
-
Chiameremo dunque quadrivettore un vettore appartenente a tale spazio. Ingenerale, un quadrivettore è una grandezza che, sotto una trasformazione diLorentz ovvero una trasformazione da un sistema inerziale ad un altro, sitrasforma come x, y, z e ct. Una qualsiasi grandezza �sica vettoriale sarà dunquedi fatto una grandezza quadrivettoriale. Le quattro componenti vengono chiamatecomponenti controvarianti e sono scritte con un indice in alto. Ricordiamo che
x0 = ct x1 = x x2 = y x3 = z (45)
e scriveremo così un generico quadrivettore:
aµ = (a1, a2, a3, a0) (46)
Chiameremo componenti spaziali le prime tre componenti del quadrivettore;e componente temporale la quarta componente. Potremo indicare anche così:
aµ = (a , a0) (47)
dove il carattere grassetto indica, come al solito, un vettore nello spaziotridimensionale.
È molto semplice veri�care che per due quadrivettori aµ e bµ la quantità
a0b0 − a1b1 − a2b2 − a3b3 (48)
risulta invariante sotto trasformazioni di coordinate, cioè sotto trasformazioni diLorentz; dunque essa può de�nire il prodotto scalare tra i due quadrivettori:
a · b ≡ a0b0 − a1b1 − a2b2 − a3b3 (49)
Possiamo anche scrivere così, sottintendendo la somma su indici ripetuti:
a · b = gµν aµbν (50)
dove
gµν = 0 se µ 6= ν g00 = 1; g11 = −1; g22 = −1; g33 = −1 (51)
gµν viene chiamato tensore metrico o semplicemente metrica dello spazioquadridimensionale. Con l'ausilio di gµν possiamo de�nire le componenticovarianti di un quadrivettore, che sono scritte con un indice in basso:
aµ = gµνaν (52)
10
-
e possiamo dunque scrivere il prodotto scalare anche così:
a · b = aµbµ = aµbµ (53)
In particolare possiamo calcolare il prodotto scalare
a · a = (a0)2 − (a1)2 − (a2)2 − (a3)2 (54)
che è naturale de�nire norma del quadrivettore a. Poiché le quantità aµ sonoarbitrarie, vediamo che la norma di un quadrivettore può essere positiva, negativao nulla. Corrispondentemente, diciamo che il quadrivettore è di tipo tempo(timelike), spazio (spacelike) o luce (lightlike).
Inversione temporale e causalità
Consideriamo un evento P1: per esempio il lampo di un �ash fotogra�coche avviene ad un certo istante t1 nel punto dello spazio di coordinate (x1, y1, z1);ed un altro evento P2 che immaginiamo sia un altro lampo all'istante t2 in unaltro punto di coordinate (x2, y2, z2). Ai due eventi corrispondono dunque i raggivettori
xµ1 = (x1, y1, z1, ct1) xµ2 = (x2, y2, z2, ct2) (55)
Si de�nisce distanza tra i due eventi il vettore
sµ = xµ2 − xµ1 = (x2 − x1 , y2 − y1 , z2 − z1 , c(t2 − t1)) (56)
Osserviamo ora che se la distanza tra i due eventi P1 e P2 è di tipo spacelike,la successione temporale di essi può risultare invertita, a patto di osservare talieventi da un opportuno sistema di riferimento. Supponiamo per semplicità chei due lampi avvengano sull'asse x (dunque con coordinate y e z uguali a zero) eche sia
c2(t2 − t1)2 − (x2 − x1)2 < 0 (57)ed inoltre che, in un dato sistema di riferimento, sia
t2 > t1 (58)x2 > x1 (59)
11
-
Possiamo scrivere dunque che per tali eventi:
c (t2 − t1) < x2 − x1 (60)
ovveroc (t2 − t1)x2 − x1 < 1 (61)
Osserviamo ora i due eventi precedenti da un altro sistema di riferimento. Conuna trasformazione di Lorentz abbiamo
t′1 =t1 − (V/c2) x1√
1− V 2/c2(62)
t′2 =t2 − (V/c2) x2√
1− V 2/c2(63)
cioèt′2 − t′1 =
t2 − t1 − (V/c2)(x2 − x1)√1− V 2/c2
(64)
Veri�care se è possibile che nel nuovo sistema di riferimento t′2 − t′1 sia negativo,equivale a veri�care se è possibile che si possa ottenere
t2 − t1 − Vc2
(x2 − x1) < 0 (65)
ovveroV >
(t2 − t1) cx2 − x1 c (66)
D'altra parte, ricordando la (61), ciò signi�ca che V deve essere maggiore di unacerta velocità comunque minore di c: cosa che è sempre possibile avere.
Da ciò segue che l'evento P1 può essere la causa dell'evento P2 solo se ladistanza tra tali eventi è di tipo timelike o lightlike; diversamente esisterebberosistemi di riferimento rispetto ai quali osserveremmo un e�etto che precedetemporalmente la sua causa: in contraddizione con il principio di causalità.
Trasformazioni di Lorentz generiche
Scriviamo così una generica trasformazione di Lorentz:
x′µ = Λµνxν (67)
12
-
della quale la (21) è il caso particolare che riguarda un moto traslatorio di O′
lungo l'asse x (con assi paralleli). Per un generico quadrivettore, del quale xµ èil prototipo, vale altrettanto la seguente legge di trasformazione, che è dunque lalegge di trasformazione per le componenti controvarianti:
a′µ = Λµνaν (68)
Tale relazione può essere invertita, scrivendo dunque
aµ = Θµνa′ν (69)
dove Θµν è la matrice inversa di Λµν :
Θνµ Λµσ = δ
νσ (70)
Ricordiamo che il prodotto scalare a · b è un invariante. Scriviamo allora,cambiando opportunamente nome agli indici muti:
a · b = a′µb′µ = a′ρb′ρ = Λρσaσb′ρ = aσbσ (71)
Poiché tale uguaglianza deve essere valida per qualsiasi valore di aσ segue
bσ = Λρσb′ρ (72)
che è simile alla (68) a parte lo scambio delle quantità relative ad O e O′.Invertendo tale relazione scriviamo
b ′µ = Θνµ bν (73)
Le equazioni di Maxwell non omogenee
Ci accorgiamo che nello spazio quadridimensionale di Minkowski è moltosemplice scrivere le equazioni di Maxwell in forma compatta. A questo scopo,�inventiamoci� la seguente matrice antisimmetrica F µν (ponendo dunque gli indiciin alto). È proprio il caso di dire �inventiamoci� perché, per il momento, questa
13
-
tabella non ha alcun particolare signi�cato; è soltanto un utile metodo di scritturae gli indici µ e ν sono semplicemente indici di riga e di colonna:
F µν =
∣∣∣∣∣∣∣∣∣
0 −Bz By Ex/cBz 0 −Bx Ey/c−By Bx 0 Ez/c−Ex/c −Ey/c −Ez/c 0
∣∣∣∣∣∣∣∣∣(74)
E inventiamoci anche questa matrice colonna:
jµ =
∣∣∣∣∣∣∣∣∣
jxjyjzcρ
∣∣∣∣∣∣∣∣∣(75)
Nelle espressioni precedenti, l'indice zero deve essere pensato come indice� quattro�, riferendosi cioè alla quarta riga o alla quarta colonna, a seconda deicasi.
Ebbene, le equazioni di Maxwell non omogenee sono contenute in questarelazione:
∂µFµν = µ0j
ν (76)
dove abbiamo de�nito∂µ ≡ ∂
∂xµ(77)
Infatti, poniamo per esempio ν = 1. Otteniamo:
∂1F11 + ∂2F
21 + ∂3F31 + ∂0F
01 = µ0j1 (78)
ovvero∂Bz∂y
− ∂By∂z
− 1c2
∂Ex∂t
= µ0j1 (79)
cioè:(rotB)x = µ0jx + µ0ε0
∂Ex∂t
(80)
Ponendo ν = 2, 3 si ottengono equazioni simili per le altre componenti. Ponendoν = 0 otteniamo invece:
∂1F10 + ∂2F
20 + ∂3F30 + ∂0F
00 = µ0j0 (81)
ovvero1
c
∂Ex∂x
+1
c
∂Ey∂y
+1
c
∂Ez∂z
= µ0cρ (82)
14
-
cioèdivE = µ0c2ρ = ρ/ε0 (83)
È inoltre molto semplice scrivere l'equazione di continuità. Infatti si haovviamente:
∂µ∂νFµν = 0 (84)
poiché sulla quantità antisimmetrica F µν agisce l'operazione ∂µ∂ν che èevidentemente simmetrica negli indici µ e ν. D'altra parte, per la (76), si ha
∂µ∂νFµν = µ0∂µj
µ (85)
dalle (84) e (85) si ha dunque:∂µj
µ = 0 (86)
che è proprio l'equazione di continuità. Scrivendo esplicitamente, infatti:
∂1 j1 + ∂2 j
2 + ∂3 j3 + ∂0 j
0 = 0 (87)
ovverodiv j + 1
c
∂
∂tj4 = div j + ∂ρ
∂t= 0 (88)
Campi tensoriali nello spazio di Minkowski
In un dato sistema di riferimento, un campo scalare è de�nito dauna funzione ordinaria delle coordinate spaziali e del tempo (di solito, nelleapplicazioni, tale funzione è continua e derivabile un numero arbitrario di volte).Un classico esempio è fornito dalla temperatura in una certa zona della Terra: latemperatura è infatti funzione della latitudine, longitudine e quota del punto checi interessa; e cambia al trascorrere del tempo. Scriviamo dunque
T = T (x, y, z, ct) ≡ T (x) (89)
intendendo brevemente con x l'insieme delle quattro coordinate spazio-temporali.Se cambiamo sistema di riferimento, lo stesso campo delle temperature saràdescritto da una nuova funzione T ′(x′) per la quale deve dunque valere:
T ′(x′) = T (x) (90)
15
-
conx′ν = Λνµ x
µ (91)
Altrettanto, si può parlare di campo vettoriale vµ(x) se in due diversi sistemi diriferimento si ha comunque:
vµ(x)eµ = v′ν(x′)e′ν (92)
dove con eµ e e′ν sono indicati i versori degli assi coordinati nei rispettivi sistemidi riferimento. D'altra parte, per i versori, vale la legge di trasformazione
eµ = Λνµe′ν (93)
Da ciò segue:vµ(x) Λνµ e
′ν = v
′ν(x′)e′ν (94)
ovvero:v′ν(x′ρ = Λρσ x
σ) = Λνµ vµ(x) (95)
Per le componenti covarianti di un campo vettoriale vale evidentemente
v′ν(x′) = Θρν vρ(x) (96)
In generale, abbiamo campi tensoriali per i quali si veri�ca, ad esempio:
T ′µν(x′ρ = Λρσ xσ) = Λµα Λ
νβ T
αβ(x) (97)
Vogliamo ora mostrare che il gradiente di un campo scalare è un campo vettorialecon indice covariante o, come si dice brevemente, è un vettore covariante. Datoun campo ϕ(x) dobbiamo calcolare le derivate rispetto alle coordinate che, comesappiamo, sono le componenti controvarianti del raggio vettore. In altri termini,dobbiamo calcolare
∂
∂xµϕ(x) (98)
In un altro sistema di riferimento scriviamo, altrettanto:∂
∂x′µϕ′(x′) (99)
D'altra parte, possiamo scrivere facilmente questa serie di uguaglianze:∂
∂x′µϕ′(x′) =
∂
∂x′µϕ(x) =
∂xν
∂x′µ∂
∂xνϕ(x) = Θνµ
∂
∂xνϕ(x) (100)
16
-
La prima uguaglianza segue dal fatto che ϕ è un campo scalare; la seconda dallaregola di derivazione delle funzioni composte; e la terza dalla proprietà (91). La(100) rappresenta dunque proprio quanto volevamo dimostrare. Si può scrivereanche così:
∂
∂xµϕ(x) = ∂µϕ(x) (101)
facendo apparire in modo più esplicito la natura covariante dell'indice µ.Possiamo allora ricavare dalla (86) una conseguenza molto importante.
Poiché l'operatore ∂µ produce un indice covariante e ∂µjµ è una quantità scalare(in rispetto del principio di relatività deve essere nulla in qualsiasi sistema diriferimento, ovvero la conservazione della carica elettrica deve comunque valere),segue che jµ è necessariamente un vettore controvariante . Stabilito questo, dalla(76) segue che F µν è necessariamente un tensore controvariante che è chiamatotensore elettromagnetico. Con queste conclusioni, le �semplici� tabelle (74) e (75)acquistano un valore del tutto rilevante: esse mostrano il contenuto di un campotensoriale e vettoriale rispettivamente. In altri termini, gli indici µ e ν di riga e dicolonna sono e�ettivamente indici di Lorentz, caratteristici di vettori (o tensori)nello spazio di Minkowski.
Si dice allora che le equazioni di Maxwell, scritte nella (76) sono espressein forma covariante nel senso che sono appunto relazioni tra enti vettoriali otensoriali nello spazio di Minkowski. In generale, per rispettare il principio direlatività, tutte le equazioni della �sica dovranno dunque risultare covarianti.
Meccanica relativistica
Passando allo studio della dinamica del punto materiale, ci accorgiamosubito che l'equazione newtoniana, così come è scritta,
F = ddtp (102)
è sicuramente non covariante, poiché è una relazione tra vettori dello spazioordinario tridimensionale e non tra vettori o tensori quadridimensionali.Dobbiamo quindi rimpiazzare la (102) con un'equazione covariante che, d'altra
17
-
parte, riproduca la (102) stessa nel limite di velocità piccole rispetto a quella dellaluce.
Cominciamo con il de�nire le quantità cinematiche rilevanti.Supponiamo di individuare un punto materiale in movimento in un certo
riferimento inerziale R che, ad un dato istante t, ha coordinate spaziali x, y e z.Ciò equivale a conoscere il raggio vettore
xµ = (x, y, z, ct) (103)
Supponiamo che in tale istante il punto abbia una velocità (tridimensionale) v .Dopo un intervallo di tempo in�nitesimo dt, il punto si è spostato di una quantitàin�nitesima e l'incremento del raggio vettore risulta
dxµ = (dx, dy, dz, cdt) = (vxdt, vydt, vzdt, cdt) (104)
La sua norma è
(dxµ)2 = (c2 − v2x − v2y − v2z) dt2 = (c2 − v2) dt2 (105)
dove con v2 denotiamo il quadrato del modulo tridimensionale della velocità.Osserviamo ora il punto materiale da un altro sistema di riferimento R′ che simuove di moto traslatorio rispetto a R proprio con velocità v . La norma rimane lastessa; d'altra parte, rispetto ad R′ il punto materiale è fermo. Per conseguenza,vale la seguente uguaglianza:
(dx′µ)2 = c2dt′2 = (c2 − v2) dt2 = (dxµ)2 (106)
dalla quale si vede che l'intervallo di tempo dt′, misurato nel sistema di riferimentoche in quell'istante �segue� il punto materiale nel suo movimento, è un invarianterelativistico (poiché lo sono (dxµ)2 e c2). Tale intervallo di tempo viene di solitoindicato con il simbolo dτ e, come abbiamo già avuto occasione di dire, vienechiamato intervallo di tempo proprio. Si ha dunque:
dt′ = dt√
1− v2/c2 ≡ dτ (107)
Riconsideriamo l'elemento spazio-temporale (che è un quadrivettore in�nitesimo)
dxµ = (dx , cdt) (108)
18
-
Dividendo per dτ (che è una quantità scalare) otteniamo dunque un altroquadrivettore:
uµ ≡ dxµ
dτ=
v√
1− v2/c2,
c√1− v2/c2
= (γv , γc) (109)
che è naturale de�nire come quadrivelocità, giacché la sua parte spaziale coincideproprio con l'ordinario vettore velocità, nel limite non relativistico. Notiamo chela quadrivelocità ha norma costante (positiva) uguale a c2:
(uµ)2 = γ2c2 − γ2v2 = γ2c2(
1− v2
c2
)= c2 (110)
Moltiplicando per la massa m del punto materiale de�niamo altrettanto ilquadrimpulso:
pµ ≡ m uµ = mv√
1− v2/c2,
mc√1− v2/c2
= (γmv , γmc) (111)
che evidentemente ha norma costante uguale a m2c2.Per quanto riguarda la dinamica, ci riferiamo alla forza di Lorentz che,
d'altra parte, è una forza fondamentale della Natura; per la quale non sononecessari modelli fenomenologici, come invece accade per le forze elastiche o leforze di attrito ecc.
In termini di vettori tridimensionali sappiamo che:
f = q (E + v ×B) (112)
Per la componente x, per esempio:
fx = q (Ex + vyBz − vzBy) (113)
In termini del tensore elettromagnetico:
fx = q (cF10 + vyF
21 − vzF 13) (114)
D'altra parte, per de�nizione di uµ:
fx = q
(cF 10 +
u2
γF 21 − u
3
γF 13
)(115)
19
-
Ora studiamo con cura il seguente passaggio, nel quale abbassiamo gli indici dellaquadrivelocità. Ricordiamoci che, per la struttura di gµν , si ha u0 = u0, ui = −ui(questa è una regola generale da tenere sempre presente: la quarta componentedi un quadrivettore rimane immutata abbassando (o innalzando) il suo indice; lecomponenti spaziali cambiano segno).
Ricordiamoci anche dell'antisimmetria del tensore elettromagnetico. Conqueste indicazioni è facile rendersi conto che si ha:
f 1 = fx = q
(u0γ
F 10 +u2γ
F 12 +u3γ
F 13 +u1γ
F 11)
=q
γuνF
1ν (116)
(l'ultimo addendo è identicamente nullo e lo abbiamo aggiunto nell'espressione(115); in questo modo però ci siamo avvantaggiati ottenendo una scrittura nellaquale compaiono tutti gli indici sommati).
Espressioni analoghe si ottengono per le altre componenti spaziali di f e inde�nitiva possiamo veri�care che:
γf i = qF iνuν (117)
dove con l'indice i abbiamo denotato la componente che può essere x, y o z. Aquesto punto è naturale introdurre un'analoga espressione f 0, de�nita da
γf 0 = qF 0νuν (118)
e scrivereγfµ = qF µνuν (119)
Al secondo membro abbiamo un quadrivettore e allora lo è altrettanto il primomembro che de�nisce così la quadriforza F µ:
F µ ≡ γfµ = qF µνuν (120)
A parte il fattore γ, la parte spaziale coincide con l'espressione tridimensionaledella forza di Lorentz f ; e la parte temporale risulta
F 0 = γq
cE · v (121)
In de�nitiva, scrivendo esplicitamente la parte spaziale e quella temporale,abbiamo il quadrivettore
F µ =(γf , γ q
cE · v
)=
(γf , γ 1
cf · v
)(122)
20
-
L'ultimo passaggio è giusti�cato dal fatto che la parte magnetica della forza diLorentz non contribuisce (si ha un prodotto misto nullo).
Dobbiamo ora uguagliare la quadriforza ad un'espressione che contenga lavariazione di impulso, come è suggerito dall'equazione newtoniana. Per rispettarela covarianza, non possiamo avere altro che:
F µ =dpµ
dτ(123)
La parte spaziale risulta:
F = dpdτ
=d
dτ
mv√1− v2/c2
=1√
1− v2/c2d
dt
mv√1− v2/c2
(124)
ovverof = d
dt
mv√1− v2/c2
(125)
che, per piccole velocità, si riduce all'equazione di Newton f = m dv/dt .Una conseguenza molto importante viene dalla quarta componente della
(123) per la quale risulta:
f · v dt = d (mc2γ) = d mc2
√1− v2/c2
(126)
Al primo membro compare il lavoro compiuto dalla forza di Lorentz nel tempodt; dunque al secondo membro deve comparire la variazione di energia cineticadE. Questo ci suggerisce la seguente espressione per E:
E =mc2√
1− v2/c2(127)
In particolare, per piccole velocità, sviluppando in serie rispetto a v2, si ha:
E ≈ mc2(
1 +1
2
v2
c2
)= mc2 +
1
2mv2 (128)
che, a parte il valore costante mc2, coincide con l'espressione classica. D'altraparte, se l'espressione corretta per l'energia cinetica è la (127), non possiamoomettere il termine mc2 che risulta dunque presente anche per velocità nulle.Questo termine è chiamato energia di riposo che compete ad un punto materialedi massa m. Il solo fatto che un corpo abbia massa m implica pertanto
21
-
che esso possieda comunque un'energia pari a mc2: massa ed energia sonodunque strettamente correlate. Discuteremo più avanti l'e�ettiva validità della(127). Un'altra relazione importante lega l'energia all'impulso di una particella.Ricordiamo infatti che
pµ =
p, mc√
1− v2/c2
Moltiplicando per c:
cpµ =
cp, mc
2
√1− v2/c2
= (cp, E)
da questa si ricavac2p2 = E2 − c2 |p|2 (129)
nella quale p è la parte spaziale del quadrimpulso:
p = mv√1− v2/c2
(130)
Ricordiamo inoltre che
p2 = pµpµ =1
1− v2/c2 (mc2 −mv2) = m2c2 (131)
e dunque, dalla (129):E2 = c2 |p|2 + m2c4 (132)
A questo punto, è molto importante studiare il caso limite nel quale si consideranoparticelle di massa nulla.
In meccanica classica, ad una particella di massa nulla competono impulsoed energia nulli. In pratica ciò signi�ca che, in meccanica classica, non esistonoparticelle di massa nulla. O, per meglio dire, la eventuale presenza di particellea massa nulla non è osservabile: non possiamo accorgerci se esse intervengono inun qualsiasi processo, dal momento che esse non apportano alcuna variazione diimpulso o di energia (e anche di momento angolare).
La situazione è completamente diversa in relatività: la presenza di particelledi massa nulla è assolutamente ammissibile ed osservabile. Ce ne accorgiamo dalla(131): nel limite di m che tende a zero osserviamo che il quadrimpulso è di tipoluce:
p2 = pµpµ = 0 (133)
22
-
ma ciò non signi�ca che la parte spaziale e quella temporale di pµ sianoseparatamente nulle. Per di più, dalla (132), possiamo anche osservare che unaparticella di massa nulla possiede un'energia cinetica:
E = c |p| (134)
D'altra parte, è semplice ricavare la relazione che lega E al modulo spazialedell'impulso |p| e alla velocità v di una particella di massa m. Dalla (130) si hainfatti, prendendo i moduli e moltiplicando per c2:
E =c2 |p|
v(135)
Confrontando con la (134) si vede che per una particella di massa nulla siha necessariamente v = c; ovvero una particella di massa nulla si muovenecessariamente alla velocità della luce.
Questi risultati non sono in contraddizione con le espressioni (127) e (130)che sembrerebbero fornire impulso ed energia comunque nulli, quando m tendea zero. Infatti, tali limiti sono e�ettivamente zero se v è diversa da c: in questocaso la particella è inosservabile, come in meccanica classica; ma se si ammetteche il passaggio al limite m → 0 sia accompagnato da v che tende a c, i limiti inquestione possono benissimo essere diversi da zero.
Notiamo che la relazione (134) è quella che lega energia e impulso di un'ondapiana monocromatica. Ciò ci permette di interpretare la propagazione del campoelettromagnetico come propagazione di particelle di massa nulla: i fotoni.
Rimane la questione della validità della (127), dalla quale derivano lecircostanze che abbiamo appena esposto. In particolare, vogliamo valutarel'energia di risposo per la quale deve valere
E = mc2 (136)
Si deve proprio ad Einstein un argomento a riprova di ciò.Immaginiamo un vagone di massa M e di lunghezza L all'estremo sinistro
del quale sia posto il �ash di una macchina fotogra�ca. All'altro estremo sia postouno schermo S che assorbe la luce che gli viene inviata orizzontalmente, lungol'asse x verso destra. Se px è l'impulso del campo elettromagnetico associato allaluce del �ash, non c'è dubbio che, dopo il lampo, il vagone subirà un rinculo
23
-
acquistando una quantità di moto − px (a meno che, ma questo è assolutamenteirragionevole, non si voglia rinunciare al principio di conservazione dell'impulso).Quando poi la luce sarà arrivata ed assorbita da S, il vagone tornerà ad averequantità di moto nulla. Di quanto si è spostato il vagone, viaggiando con impulso− px, prima che la luce venga assorbita? È evidente che la velocità del vagone è
vx = − px/M (137)
e il trasferimento della luce è avvenuto in un tempo t che è praticamente:
t = L/c (138)
dunque il vagone si è spostato della quantità
∆xvagone = vxt = − LpxMc
= − ELMc2
(139)
e di altrettanto si è spostato il suo centro di massa. D'altra parte, durante tuttol'esperimento che si è svolto all'interno del vagone, il centro di massa del sistemacomplessivo deve essere rimasto dov'era inizialmente. Come possiamo riconciliarela (139) con quest'ultima circostanza? Evidentemente, il trasferimento dellaquantità di energia raggiante E = pc da un estremo all'altro, per un tratto L, èstato equivalente ad un trasferimento di massa m, per lo stesso tratto L in modotale da avere:
mL = −M∆xvagone = ELc2
(140)
ovvero:E = mc2 (141)
Estensione al caso di forze arbitrarie
Possiamo estendere le considerazioni fatte, a proposito della forza di Lorentz,al caso di forze di qualsiasi natura. Osserviamo intanto che, comunque si de�niscala quadriforza, questa è necessariamente ortogonale al quadrimpulso. Ciò èconseguenza del fatto che il quadrimpulso ha norma costante:
0 =d
dτ(pµ)2 = 2pµ
dpµ
dτ= 2pµF
µ (142)
24
-
Consideriamo ora un punto materiale P di massa m che, ad un certo istante, nelriferimento O, ha velocità (tridimensionale) v . Consideriamo un altro sistemadi riferimento O′ che trasla rispetto ad O proprio con velocità v . Rispetto aquest'ultimo riferimento, P è fermo in quell'istante; dunque la sua quadrivelocitàè il vettore
v′µ = (0, γc) (143)
D'altra parte, la quadriforza è comunque ortogonale alla quadrivelocità e si dovràavere in O′, quali che siano le componenti spaziali f :
F ′µ = (f , 0) (144)
a�nchéF · v = 0
La quantità f deve coincidere con la forza newtoniana, poiché nel sistema O′ ilpunto materiale si muove a velocità molto piccola rispetto a quella della luce (èaddirittura fermo!)
Per semplicità, immaginiamo che P si muova lungo l'asse x e sia sottopostoad una forza anch'essa diretta lungo l'asse x. Avremo dunque
F ′µ = (fx, 0, 0, 0) (145)
Le trasformazioni di Lorentz ci dicono ora quali componenti ha la quadriforza nelsistema originale O. Precisamente, si vede che
Fx = γfx (146)F0 = γβfx
e allora scriviamo l'equazione (123)
(γfx, γβfx) =d
dτ(mγvx,mγc) (147)
ovvero, ricordando chedt = γdτ
(γfx, γβfx) = γd
dt(mγvx,mγc) (148)
25
-
Sempli�cando il fattore γ:
(fx, βfx) =d
dt(mγvx,mγc) (149)
La componente spaziale di questa equazione è:
fx =d
dt
mvx√1− v2x/c2
(150)
che, per piccole velocità, si riduce alla formula galileiana. Dall'equazione per laparte temporale
βfx =d
dtmγc
ricaviamofxvxdt = d(mc
2γ) = dmc2√
1− v2/c2(151)
Al primo membro compare il lavoro fatto dalla forza nel tempo dt; dunque alsecondo membro deve comparire la variazione di energia cinetica dE. Anche oravediamo dunque che la relatività ci suggerisce l'espressione
E =mc2√
1− v2/c2(152)
26