Terminale CPX US patent no. 6,085,632 - festo.com · 5.6.8 Diagrammi di flusso dei segnali...
250
Manuale parte elettronico Soft Stop CMPX Controllore di finecorsa tipo CPX-CMPX-C-1-H1 Descrizione del sistema Soft Stop CMPX Montaggio, installazione, messa in funzione e diagnosi Sistema Soft Stop Terminale CPX Manuale 555 483 it 1208b [8021712] US patent no. 6,085,632
Transcript of Terminale CPX US patent no. 6,085,632 - festo.com · 5.6.8 Diagrammi di flusso dei segnali...

Manuale parteelettronico
Soft Stop CMPX
Controllore difinecorsatipoCPX-CMPX-C-1-H1
Descrizione delsistemaSoft Stop CMPX
Montaggio,installazione,messa in funzionee diagnosiSistema Soft Stop
Terminale CPX
Manuale555 483it 1208b[8021712]
USpatentno.6,085,632

Indice e avvertenze generali di sicurezza
IFesto P.BE-CPX-CMPX-SYS-IT it 1208b
Originale de. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Edizione it 1208b. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Denominazione P.BE-CPX-CMPX-SYS-IT. . . . . . . . . . . . . . . .
Codice di ordinazione 555 483. . . . . . . . . . . . . . . . . . . . . . .
© (Festo AG & Co. KG, D-73726 Esslingen, 2012)Internet: http://www.festo.comE-Mail: [email protected]
È vietato consegnare a terzi o riprodurre questodocumento, utilizzarne il contenuto o renderlo comunquenoto a terzi senza esplicita autorizzazione. Ogni infrazionecomporta il risarcimento dei danni subiti. Tutti i diritti sonoriservati, compreso il diritto di deposito brevetti, modelliregistrati o di design.

Indice e avvertenze generali di sicurezza
II Festo P.BE-CPX-CMPX-SYS-IT it 1208b
PROFIBUS®, PROFIBUS-DP®, PROFINET IO®, DeviceNet®, RSLinx®, RSLogix®, RSNetworxfor DeviceNet®, EtherNet/IP®, EtherCat®, CC-Link®, INTERBUS®, HARAX® e TORX® sonomarchi registrati dei singoli proprietari in determinati paesi.

Indice e avvertenze generali di sicurezza
IIIFesto P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
Impiego conforme all’utilizzo previsto IX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Avvertenza per la sicurezza X. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Gruppo di destinazione XII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Assistenza XII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Versioni software necessarie XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Importanti indicazioni per l’utilizzatore XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Indicazioni relative al presente manuale XVI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Glossario XIX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1. Panoramica del sistema CMPX 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Controllore di finecorsa CMPX 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Elementi di connessione e segnalazione del CMPX 1-3. . . . . . . . . . . . .
1.1.2 Funzione del CMPX 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.3 CMPX nel terminale CPX 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Struttura di un sistema Soft Stop 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Possibilità di messa in funzione, parametrizzazionee programmazione mediante “teach-in” 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indice e avvertenze generali di sicurezza
IV Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2. Montaggio e installazione dei componenti pneumatici 2-1. . . . . . . . . . . . . . .
2.1 Indicazioni generali di montaggio e installazione 2-3. . . . . . . . . . . . . . . . . . . . . .
2.2 Smontaggio e montaggio del CMPX 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Montaggio dell’attuatore e del trasduttore di posizione 2-8. . . . . . . . . . . . . . . .
2.3.1 Requisiti generali dei componenti meccanici 2-9. . . . . . . . . . . . . . . . .
2.3.2 Attuatore e battute fisse 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.3 Trasduttore di posizione 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.4 Carico 2-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Montaggio della valvola proporzionale di controllo portata VPWP 2-18. . . . . . . .
2.5 Montaggio dell’interfaccia sensori CASM-... 2-21. . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Installazione dei componenti pneumatici 2-22. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.1 Alimentazione dell’aria compressa 2-22. . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.2 Filtro-riduttore 2-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.3 Serbatoio per aria compressa (opzione) 2-24. . . . . . . . . . . . . . . . . . . . .
2.6.4 Valvola proporzionale di controllo portata tipo VPWP-... 2-24. . . . . . . .
2.6.5 Tubi pneumatici e raccordi 2-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Collegamenti elettrici 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Messa a terra 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Connessione assi 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
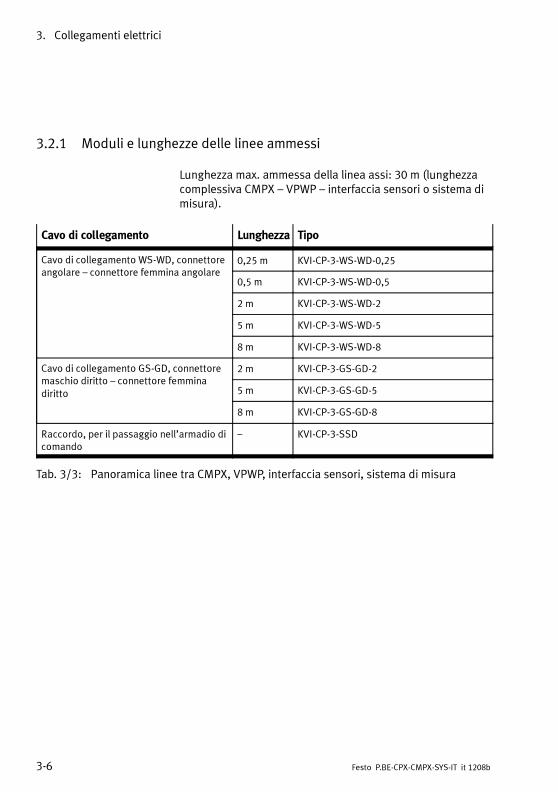
3.2.1 Moduli e lunghezze delle linee ammessi 3-6. . . . . . . . . . . . . . . . . . . . .
3.2.2 Valvola proporzionale di controllo portata VPWP 3-7. . . . . . . . . . . . . .
3.2.3 Interfaccia sensori CASM 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Garanzia del grado di protezione IP65/IP67 3-11. . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Alimentazione di tensione 3-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Determinazione dell’assorbimento di corrente 3-13. . . . . . . . . . . . . . . .
3.4.2 Principio di alimentazione elettrica –Formazione di zone di tensione 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.3 Principio di alimentazione elettrica –Disinserimento della tensione di carico 3-18. . . . . . . . . . . . . . . . . . . . . .
Indice e avvertenze generali di sicurezza
VFesto P.BE-CPX-CMPX-SYS-IT it 1208b
4. Messa in funzione 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Panoramica/procedura per la messa in funzione 4-3. . . . . . . . . . . . . . . . . . . . .
4.1.1 Indicazioni per la messa in funzione 4-5. . . . . . . . . . . . . . . . . . . . . . . .
4.1.2 Panoramica sulle procedure specifiche per la messa in funzione 4-6.
4.2 Operazioni preliminari per la messa in funzione 4-7. . . . . . . . . . . . . . . . . . . . . .
4.2.1 Controllo della linea assi 4-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Inserimento dell’alimentazione di tensione, caratteristichedi inserimento 4-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Principi fondamentali della parametrizzazione e del comando 4-12. . . . . . . . . . .
4.3.1 Parametri A, C, S 4-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Parametri L, r 4-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Parametro o 4-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.4 Procedura di teach-in 4-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.5 Corsa di riferimento 4-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.6 Posizioni intermedie 4-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Messa in funzione con il pannello operativo 4-24. . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 Display e tastiera 4-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 Impostazione di parametri 4-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.3 Modifica dei parametri 4-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.4 Avvio della procedura di teach-in 4-32. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.5 Rilevamento delle posizione intermedie 4-35. . . . . . . . . . . . . . . . . . . . .
4.4.6 Panoramica sulla sequenza di messa in funzione 4-38. . . . . . . . . . . . . .
4.5 Funzioni di messa in servizio con l’handheld 4-40. . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Parametri (menu [Parameters] ) 4-41. . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Stato di segnale del CMPX (menu [Monitoring/Forcing] ) 4-44. . . . . . . .
4.5.3 Force mode 4-45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.4 Forcing di arresto e freno 4-47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.5 Comando (menu [Exec. Movement] ) 4-48. . . . . . . . . . . . . . . . . . . . . . . .
4.5.6 Traslazione manuale/programmazione mediante “teach-in”(Menu [Manual/Teach] ) 4-49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Indicazioni per l’esercizio 4-51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.1 Indicazioni generali per l’esercizio 4-51. . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.2 La prima istruzione di traslazione 4-53. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.3 Traslazione manuale 4-55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indice e avvertenze generali di sicurezza
VI Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC 5-1. . . . . . . . . . .
5.1 Aspetti di pianificazione riguardanti la parametrizzazione del CMPX 5-3. . . . . .
5.1.1 Indicazioni relative ai master CPX disponibili 5-3. . . . . . . . . . . . . . . . .
5.1.2 Parametri del CMPX nel master CPX 5-4. . . . . . . . . . . . . . . . . . . . . . . .
5.1.3 Parametrizzazione CPX 5-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.4 Parametrizzazione Fail Safe e Idle Mode 5-6. . . . . . . . . . . . . . . . . . . . .
5.1.5 Parametrizzazione del terminale CPX in caso di riavvio 5-7. . . . . . . . .
5.2 Messa in funzione mediante il master CPX 5-9. . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Occupazione I/O del CMPX/area di indirizzo 5-10. . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Parametrizzazione mediante dati I/O 5-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Parametrizzazione mediante l’interfaccia diagnostica I/O 5-19. . . . . . . . . . . . . .
5.6 Comando del CMPX 5-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.1 Caratteristiche di inserimento 5-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.2 Funzione base del controllo della pressione 5-21. . . . . . . . . . . . . . . . . .
5.6.3 Regolazione della posizione o della pressione non attiva 5-22. . . . . . . .
5.6.4 Trattamento dell’uscita della valvola “Freno” 5-23. . . . . . . . . . . . . . . . .
5.6.5 Procedura di teach-in 5-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.6 Traslazione manuale e programmazionemediante “teach-in” delle posizioni intermedie 5-26. . . . . . . . . . . . . . .
5.6.7 Tempi di risposta all’istruzione di traslazione 5-27. . . . . . . . . . . . . . . . .
5.6.8 Diagrammi di flusso dei segnali d’uscita 5-28. . . . . . . . . . . . . . . . . . . . .
5.7 Uso della posizione intermedia appresacome punto di riferimento per i sensori 5-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indice e avvertenze generali di sicurezza
VIIFesto P.BE-CPX-CMPX-SYS-IT it 1208b
6. Diagnosi, trattamento degli errori e ottimizzazione 6-1. . . . . . . . . . . . . . . . . .
6.1 Panoramica delle possibilità diagnostiche 6-3. . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Errori del CMPX 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Reazione in caso d’errore 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.2 Reset di errori 6-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.3 Numeri di errore del CMPX 6-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Diagnosi tramite LED 6-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Stato di esercizio normale 6-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 LED specifici di CMPX 6-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.3 LED sulla VPWP 6-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.4 LED sull’interfaccia sensori 6-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.5 LED sul sistema di misura (solo DGCI) 6-17. . . . . . . . . . . . . . . . . . . . . . .
6.4 Diagnosi mediante display/display a 7 segmenti 6-18. . . . . . . . . . . . . . . . . . . . .
6.4.1 Versione del firmware 6-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.2 Indicatore di stato 6-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Funzioni diagnostiche con l’handheld 6-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.1 Indicazione di errore e reset dell’errore (menu [Diagnostics] ) 6-20. . . .
6.5.2 Informazioni sul CMPX (menu [Module Data] ) 6-21. . . . . . . . . . . . . . . .
6.6 Diagnosi attraverso il nodo bus CPX o il CPX-FEC 6-22. . . . . . . . . . . . . . . . . . . . .
6.6.1 Dati di ingresso e di uscita dei moduli 6-22. . . . . . . . . . . . . . . . . . . . . . .
6.6.2 Bit di stato del terminale CPX 6-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.3 Interfaccia diagnostica I/O e memoria di diagnosi 6-24. . . . . . . . . . . . .
6.7 Eliminazione dei guasti del sistema 6-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.1 Anomalie di funzionamento 6-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.8 Ottimizzazione 6-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.8.1 Ottimizzazione del posizionamento 6-29. . . . . . . . . . . . . . . . . . . . . . . . .
Indice e avvertenze generali di sicurezza
VIII Festo P.BE-CPX-CMPX-SYS-IT it 1208b
A. Appendice tecnica A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Dati tecnici CMPX A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Accessori A-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.1 Componenti di un sistema Soft Stop A-5. . . . . . . . . . . . . . . . . . . . . . . .
A.2.2 Attuatori supportati A-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Sostituzione di componenti A-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4 Collegamenti pneumatici supplementari A-10. . . . . . . . . . . . . . . . . . . . . . . . . . . .
B. Configurazione con nodo bus CPX o CPX-FEC B-1. . . . . . . . . . . . . . . . . . . . . . . .
B.1 CPX-FEC B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Configurazione B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.2 Parametrizzazione del CMPX B-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Memorizzazione della configurazione realecome configurazione nominale B-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.4 Occupazione degli indirizzi B-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.5 Diagnosi B-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 CPX-FB13 (PROFIBUS-DP) B-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.1 Informazioni generali per la configurazione B-14. . . . . . . . . . . . . . . . . . .
B.2.2 Configurazione con STEP 7 B-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.3 Parametrizzazione B-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.4 Indirizzamento B-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 CPX-FB11 (DeviceNet) B-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.1 Configurazione delle caratteristiche degliutenti DeviceNet (EDS) B-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.2 Parametrizzazione (esempio RSNetworx) B-26. . . . . . . . . . . . . . . . . . . .
B.3.3 Indirizzamento B-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice analitico C-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indice e avvertenze generali di sicurezza
IXFesto P.BE-CPX-CMPX-SYS-IT it 1208b
Impiego conforme all’utilizzo previsto
Il controllore di finecorsa tipo CPX-CMPX-C-1-H1, documen-tato nella presente descrizione, è destinato esclusivamenteall’impiego nei terminali CPX di Festo per l’integrazione in unamacchina o in un impianto provvisto di tecnica dell’auto-mazione.
In combinazione con un terminale CPX con il nodo bus CPXidoneo o con CPX-FEC e con attuatori omologati dotati disistema di misura ed eventualmente di battute fisse e di unavalvola proporzionale di controllo portata VPWP, il CMPX con-sente come sistema Soft Stop le seguenti operazioni:
– lo spostamento rapido verso i finecorsa meccanici e unao due posizioni intermedie selezionabili,
– la traslazione manuale tra i finecorsa.
La decelerazione di fine corsa, la traslazione nelle posizioniintermedie e la traslazione manuale sono controllate elettro-nicamente.
Il terminale CPX con il CMPX deve essere utilizzato solo nelmodo seguente:
– secondo le norme nel settore industriale,
– nello stato originale, senza modifiche non autorizzate.Sono ammesse solo le modifiche o trasformazionidescritte nella documentazione acclusa al prodotto.
– in condizioni tecnicamente perfette,
– solo in combinazione con componenti ammissibili (val-vole, combinazioni sistema di azionamento/sistema dimisura, vedi par. 1.2).
Osservare i valori limite specificati per pressioni, tempera-ture, dati elettrici, momenti ecc.
Osservare le prescrizioni delle associazioni di categoria,dell’Ente di Sorveglianza Tecnica (TÜV), le norme VDE o leapposite disposizioni nazionali.
Indice e avvertenze generali di sicurezza
X Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Avvertenza per la sicurezza
Protezione contro tensioni di contatto pericolose
AvvertenzaElevate forze di accelerazione degli attuatori collegati! Movi-menti involontari possono provocare collisioni con rischio digravi lesioni.
Movimenti pericolosi provocati da un comando errato degliattuatori collegati, ad es. dovuti a:
– cablaggio errato o imbrattato,
– errore di azionamento dei componenti,
– errori nei generatori dei valori di misura e di segnali,
– componenti guasti o non conformi alle direttive CEM,
– errori nel comando principale.
• Prima di eseguire lavori di montaggio, installazione e manu-tenzione, disinserire l’alimentazione dell’aria compressa edella tensione contemporaneamente o nel seguente ordine:1. alimentazione dell’aria compressa2. alimentazione di tensione dell’elettronica/dei sensori3. alimentazione della tensione di carico alle uscite/valvolePrima di eseguire qualsiasi lavoro nell’area operativa dellamacchina è necessario disinserire e bloccare l’alimentazionedi aria compressa e della tensione.
• Adottare misure preventive volte a impedire l’accesso dipersone nel campo di influenza degli attuatori per la trasla-zione e di altri attuatori collegati.
• Il disinserimento dell’aria compressa o della tensione dicarico non è una misura di bloccaggio adeguata. In caso diguasto può infatti verificarsi uno spostamento accidentaledell’attuatore.
• Si consiglia di inserire l’aria compressa solo dopo averinstallato e parametrizzato a regola d’arte il sistema.
Indice e avvertenze generali di sicurezza
XIFesto P.BE-CPX-CMPX-SYS-IT it 1208b
• I freni di arresto comandati dal regolatore dell’attuatorenon sono sufficienti a garantire una protezione perso-nale adeguata!Assicurare gli assi verticali contro un’eventuale caduta oabbassamento in seguito al disinserimento dell’ariacompressa e della tensione di carico mediante misuresupplementari tipo:– bloccaggio meccanico dell’asse verticale,– dispositivo di frenatura/arresto/bloccaggio esterno
oppure– sufficiente compensazione dei pesi dell’asse.
• L’impiego in applicazioni rilevanti per la sicurezza ri-chiede misure supplementari, in Europa ad es. il rispettodelle norme elencate nella direttiva macchine CE. Senzamisure supplementari che soddisfano i requisiti minimiprevisti dalla legge, il prodotto non è idoneo a essereconsiderato elemento di sistemi di comando, rilevante alivello di sicurezza.
Protezione da tubi sotto pressione
AttenzionePericolo di lesioni in caso di manipolazione impropria ditubi sotto pressione!
Movimenti indesiderati degli attuatori collegati e movi-menti incontrollati delle tubazioni allentate possono deter-minare danni materiali o personali.
• Non disconnettere, non aprire e non recidere tubi sottopressione.
• Prima di smontare i tubi, è necessario sottoporli a sfiato(scarico dell’aria compressa).
• Usare equipaggiamenti di protezione idonei (ad esempioocchiali di protezione, calzature protettive, ecc.).

Indice e avvertenze generali di sicurezza
XII Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Gruppo di destinazione
Il presente manuale è destinata unicamente ad esperti quali-ficati nella tecnica di comando e di automazione che abbianoacquisito esperienza nelle operazioni di installazione, messain funzione, programmazione e diagnostica dei sistemi diposizionamento.
Assistenza
In caso di problemi tecnici rivolgersi al servizio assistenzalocale Festo.

Indice e avvertenze generali di sicurezza
XIIIFesto P.BE-CPX-CMPX-SYS-IT it 1208b
Versioni software necessarie
Per il funzionamento del CMPX sono necessarie determinateversioni del software del nodo CPX o CPX-FEC (versioneluglio 2012):
Nodo bus/FEC Versione necessaria 1) Utilizzo Particolarità 2)
CPX-CEC tutte adatto – max. 9 moduli CMPX
CPX-FEC a partire dalla revisione 14 (R14) adatto – max. 9 moduli CMPX
CPX-FB6 (Interbus) a partire dalla revisione 22 (R22) adatto – max. 2 moduli CMPX
CPX-FB11 (DeviceNet) a partire dalla revisione 20 (R20) adatto – max. 9 moduli CMPX
CPX-FB13 (PROFIBUS-DP) a partire dalla revisione 22 (R22) adatto – max. 9 moduli CMPX
CPX-FB14 (CANopen) a partire dalla revisione 20 (R20) adatto – max. 3 moduli CMPX
CPX-FB23 (CC-Link) a partire dalla revisione 19 (R19) adatto – max. 9 moduli CMPX
CPX-FB32 (EtherNet/IP) a partire dalla revisione 11 (R11) adatto – max. 9 moduli CMPX
CPX-FB33 (PROFINET, M12) a partire dalla revisione 7 (R7) adatto – max. 9 moduli CMPX
CPX-FB34 (PROFINET, RJ45) a partire dalla revisione 7 (R7) adatto – max. 9 moduli CMPX
CPX-FB35 (PROFINET, SCRJ) tutte adatto – max. 9 moduli CMPX
CPX-FB38 (EtherCat) tutte adatto – max. 9 moduli CMPX
CPX-SF34, CPX-SF35(PCWORX, PROFINET)
tutte adatto – max. 9 moduli CMPX
1) Per la data di revisione (R...) vedi targhetta di identificazione2) Essendo in relazione alle funzioni utilizzate del nodo CPX, la fascia di indirizzi e quindi il numero di
moduli max. sono ulteriormente limitati.
Tab. 0/1: quadro riassuntivo nodo bus CPX / CPX-FEC
Tenere anche conto delle indicazioni sulla versione delsoftware riportate nella documentazione del nodo busCPX o CPX-FEC.
Indice e avvertenze generali di sicurezza
XIV Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Importanti indicazioni per l’utilizzatore
Categorie di pericolo
Il presente manuale fornisce indicazioni sui pericoli che pos-sono insorgere in caso di uso improprio del prodotto.Tali indicazioni sono evidenziate con una parola di segnala-zione (avvertenza, attenzione, ecc.), stampate in caratteriombreggiati e contrassegnate da un pittogramma. Si distin-guono le seguenti indicazioni di pericolo:
Avvertenza... la mancata osservanza di quanto indicato può provocaregravi danni a persone o cose.
Attenzione... la mancata osservanza di quanto indicato può provocaredanni a persone o cose.
Nota... la mancata osservanza di quanto indicato può provocaredanni a cose.
Inoltre, il pittogramma che segue indica i passaggi nel testoin cui vengono descritte attività che interessano componentisensibili alle correnti elettrostatiche:
Componenti sensibili alle correnti elettrostatiche: la manipo-lazione impropria di tali componenti ne può causare il dan-neggiamento.
Indice e avvertenze generali di sicurezza
XVFesto P.BE-CPX-CMPX-SYS-IT it 1208b
Segnalazione di informazioni speciali
I seguenti pittogrammi indicano le parti di testo contenentiinformazioni speciali.
Pittogrammi
Informazioni:consigli, suggerimenti e rimandi ad altre fonti di informazioni.
Accessori:indicazioni sugli accessori necessari o adatti al prodottoFesto.
Ambiente:informazioni per l’impiego dei prodotti Festo nel rispettodell’ambiente.
Indicazioni nel testo
• Il punto contraddistingue attività che possono essereeseguite seguendo qualsiasi ordine.
1. Le cifre contraddistinguono le attività che devono essereeseguite nell’ordine indicato.
– I trattini contraddistinguono enumerazioni generiche.
Indice e avvertenze generali di sicurezza
XVI Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indicazioni relative al presente manuale
Il presente manuale si riferisce alle seguenti versioni:
– Regolatore di finecorsa CPX-CMPX-C-1-H1 da revisione 6,versione software V1.17.
Il presente manuale contiene informazioni speciali relative alfunzionamento, al montaggio, all’installazione e alla messa infunzione del controllore di finecorsa CMPX con i moduli e icomponenti della linea assi (vedi Tab. 0/2).
Per informazioni su attivazione, programmazione e diagnosidi un CMPX con il nodo bus CPX o CPX-FEC utilizzato consul-tare il capitolo 4.
Informazioni specifiche per la configurazione di determinatimaster CPX sono riportate in appendice B.
Informazioni generali e basilari su funzionamento, montaggio,installazione e messa in funzione di terminali CPX sono ripor-tate nella descrizione del sistema CPX, tipo P.BE-CPX-SYS-... .
Per informazioni generali basilari riguardanti l’utilizzodell’handheld si rimanda alla relativa descrizione perl’handheld CPX, tipo P.BE-CPX-MMI-1-... .
Indice e avvertenze generali di sicurezza
XVIIFesto P.BE-CPX-CMPX-SYS-IT it 1208b
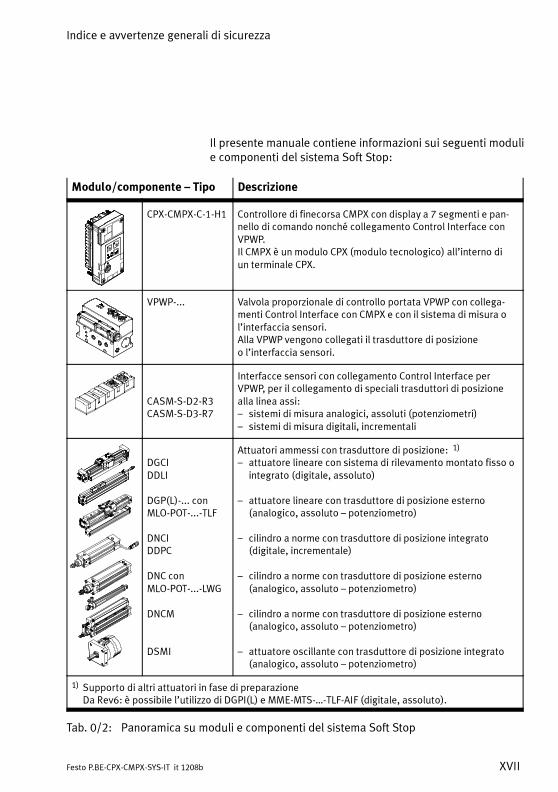
Il presente manuale contiene informazioni sui seguenti modulie componenti del sistema Soft Stop:
Modulo/componente – Tipo Descrizione
CPX-CMPX-C-1-H1 Controllore di finecorsa CMPX con display a 7 segmenti e pan-nello di comando nonché collegamento Control Interface conVPWP.Il CMPX è unmodulo CPX (modulo tecnologico) all’interno diun terminale CPX.
VPWP-... Valvola proporzionale di controllo portata VPWP con collega-menti Control Interface con CMPX e con il sistema di misura ol’interfaccia sensori.Alla VPWP vengono collegati il trasduttore di posizioneo l’interfaccia sensori.
CASM-S-D2-R3CASM-S-D3-R7
Interfacce sensori con collegamento Control Interface perVPWP, per il collegamento di speciali trasduttori di posizionealla linea assi:– sistemi di misura analogici, assoluti (potenziometri)– sistemi di misura digitali, incrementali
DGCIDDLI
DGP(L)-... conMLO-POT-...-TLF
DNCIDDPC
DNC conMLO-POT-...-LWG
DNCM
DSMI
Attuatori ammessi con trasduttore di posizione: 1)
– attuatore lineare con sistema di rilevamento montato fisso ointegrato (digitale, assoluto)
– attuatore lineare con trasduttore di posizione esterno(analogico, assoluto – potenziometro)
– cilindro a norme con trasduttore di posizione integrato(digitale, incrementale)
– cilindro a norme con trasduttore di posizione esterno(analogico, assoluto – potenziometro)
– cilindro a norme con trasduttore di posizione esterno(analogico, assoluto – potenziometro)
– attuatore oscillante con trasduttore di posizione integrato(analogico, assoluto – potenziometro)
1) Supporto di altri attuatori in fase di preparazioneDa Rev6: è possibile l’utilizzo di DGPI(L) e MME-MTS-…-TLF-AIF (digitale, assoluto).
Tab. 0/2: Panoramica su moduli e componenti del sistema Soft Stop
Indice e avvertenze generali di sicurezza
XVIII Festo P.BE-CPX-CMPX-SYS-IT it 1208b
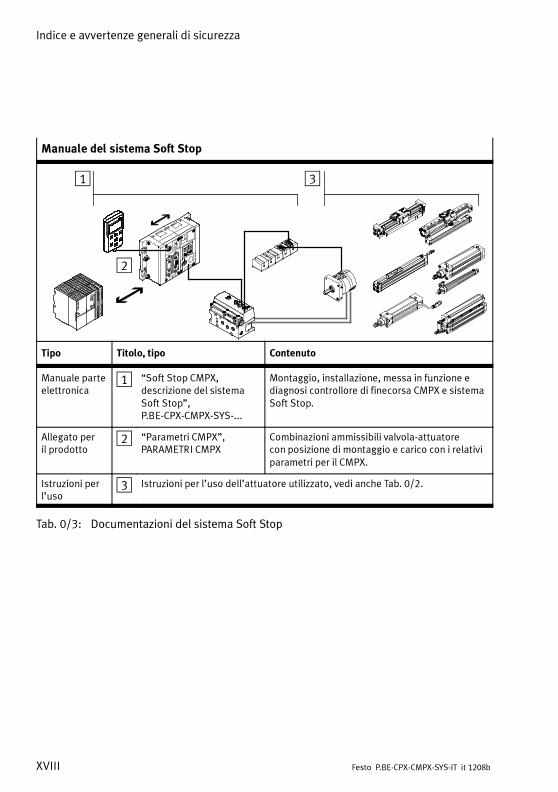
Manuale del sistema Soft Stop
1
2
3
Tipo Titolo, tipo Contenuto
Manuale parteelettronica
1 “Soft Stop CMPX,descrizione del sistemaSoft Stop”,P.BE-CPX-CMPX-SYS-...
Montaggio, installazione, messa in funzione ediagnosi controllore di finecorsa CMPX e sistemaSoft Stop.
Allegato peril prodotto
2 “Parametri CMPX”,PARAMETRI CMPX
Combinazioni ammissibili valvola-attuatorecon posizione di montaggio e carico con i relativiparametri per il CMPX.
Istruzioni perl’uso
3 Istruzioni per l’uso dell’attuatore utilizzato, vedi anche Tab. 0/2.
Tab. 0/3: Documentazioni del sistema Soft Stop
Indice e avvertenze generali di sicurezza
XIXFesto P.BE-CPX-CMPX-SYS-IT it 1208b
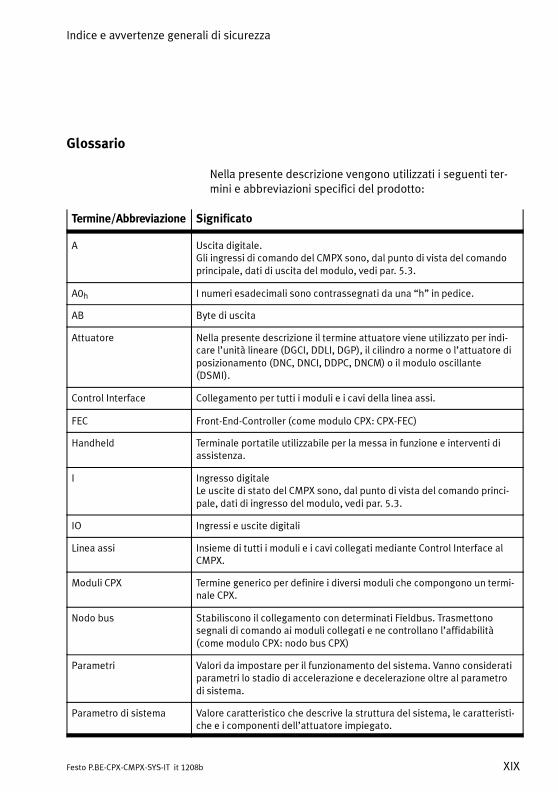
Glossario
Nella presente descrizione vengono utilizzati i seguenti ter-mini e abbreviazioni specifici del prodotto:
Termine/Abbreviazione Significato
A Uscita digitale.Gli ingressi di comando del CMPX sono, dal punto di vista del comandoprincipale, dati di uscita del modulo, vedi par. 5.3.
A0h I numeri esadecimali sono contrassegnati da una “h” in pedice.
AB Byte di uscita
Attuatore Nella presente descrizione il termine attuatore viene utilizzato per indi-care l’unità lineare (DGCI, DDLI, DGP), il cilindro a norme o l’attuatore diposizionamento (DNC, DNCI, DDPC, DNCM) o il modulo oscillante(DSMI).
Control Interface Collegamento per tutti i moduli e i cavi della linea assi.
FEC Front-End-Controller (come modulo CPX: CPX-FEC)
Handheld Terminale portatile utilizzabile per la messa in funzione e interventi diassistenza.
I Ingresso digitaleLe uscite di stato del CMPX sono, dal punto di vista del comando princi-pale, dati di ingresso del modulo, vedi par. 5.3.
IO Ingressi e uscite digitali
Linea assi Insieme di tutti i moduli e i cavi collegati mediante Control Interface alCMPX.
Moduli CPX Termine generico per definire i diversi moduli che compongono un termi-nale CPX.
Nodo bus Stabiliscono il collegamento con determinati Fieldbus. Trasmettonosegnali di comando ai moduli collegati e ne controllano l’affidabilità(come modulo CPX: nodo bus CPX)
Parametri Valori da impostare per il funzionamento del sistema. Vanno consideratiparametri lo stadio di accelerazione e decelerazione oltre al parametrodi sistema.
Parametro di sistema Valore caratteristico che descrive la struttura del sistema, le caratteristi-che e i componenti dell’attuatore impiegato.
Indice e avvertenze generali di sicurezza
XX Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Termine/Abbreviazione Significato
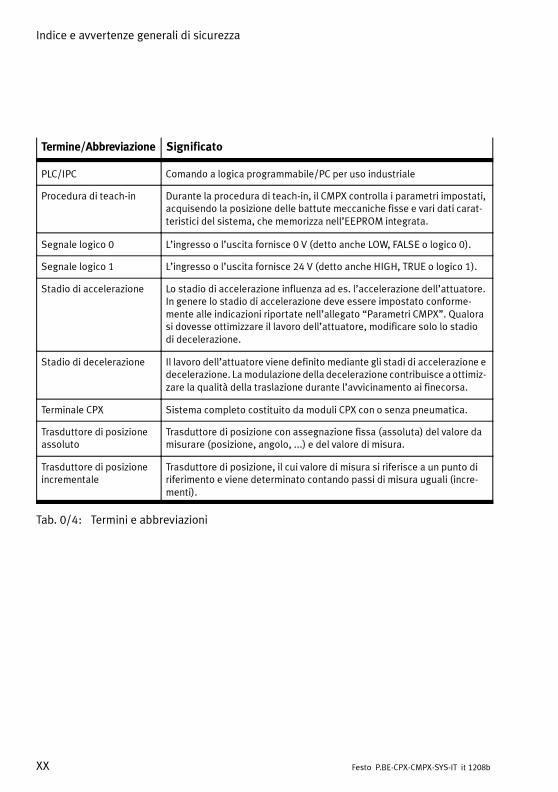
PLC/IPC Comando a logica programmabile/PC per uso industriale
Procedura di teach-in Durante la procedura di teach-in, il CMPX controlla i parametri impostati,acquisendo la posizione delle battute meccaniche fisse e vari dati carat-teristici del sistema, che memorizza nell’EEPROM integrata.
Segnale logico 0 L’ingresso o l’uscita fornisce 0 V (detto anche LOW, FALSE o logico 0).
Segnale logico 1 L’ingresso o l’uscita fornisce 24 V (detto anche HIGH, TRUE o logico 1).
Stadio di accelerazione Lo stadio di accelerazione influenza ad es. l’accelerazione dell’attuatore.In genere lo stadio di accelerazione deve essere impostato conforme-mente alle indicazioni riportate nell’allegato “Parametri CMPX”. Qualorasi dovesse ottimizzare il lavoro dell’attuatore, modificare solo lo stadiodi decelerazione.
Stadio di decelerazione Il lavoro dell’attuatore viene definito mediante gli stadi di accelerazione edecelerazione. Lamodulazionedella decelerazione contribuisce aottimiz-zare la qualità della traslazione durante l’avvicinamento ai finecorsa.
Terminale CPX Sistema completo costituito da moduli CPX con o senza pneumatica.
Trasduttore di posizioneassoluto
Trasduttore di posizione con assegnazione fissa (assoluta) del valore damisurare (posizione, angolo, ...) e del valore di misura.
Trasduttore di posizioneincrementale
Trasduttore di posizione, il cui valore di misura si riferisce a un punto diriferimento e viene determinato contando passi di misura uguali (incre-menti).
Tab. 0/4: Termini e abbreviazioni

Panoramica del sistema CMPX
1-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Capitolo 1
Panoramica del sistema CMPX
1. Panoramica del sistema CMPX
1-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
1.1 Controllore di finecorsa CMPX 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Elementi di connessione e segnalazione del CMPX 1-3. . . . . . . . . . . . .
1.1.2 Funzione del CMPX 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.3 CMPX nel terminale CPX 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Struttura di un sistema Soft Stop 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Possibilità di messa in funzione, parametrizzazionee programmazione mediante “teach-in” 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1. Panoramica del sistema CMPX
1-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
1.1 Controllore di finecorsa CMPX
1.1.1 Elementi di connessione e segnalazione del CMPX
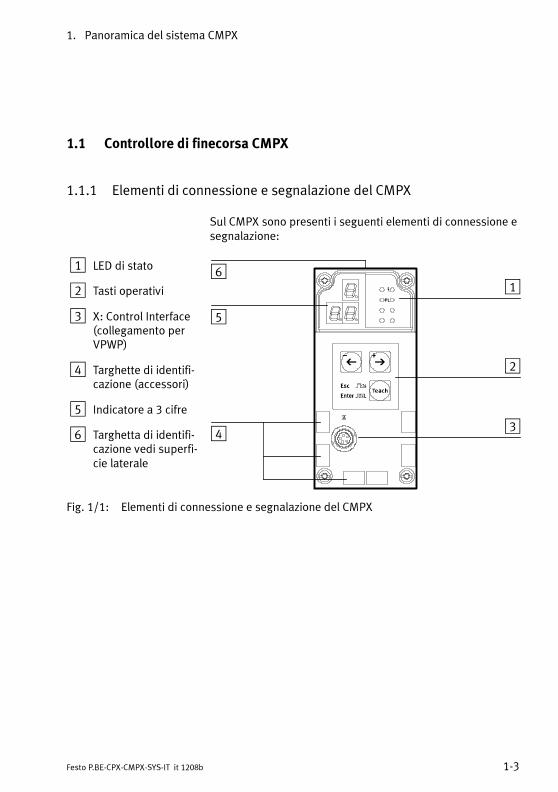
Sul CMPX sono presenti i seguenti elementi di connessione esegnalazione:
1 LED di stato
2 Tasti operativi
3 X: Control Interface(collegamento perVPWP)
4 Targhette di identifi-cazione (accessori)
5 Indicatore a 3 cifre
6 Targhetta di identifi-cazione vedi superfi-cie laterale
1
2
34
5
6
Fig. 1/1: Elementi di connessione e segnalazione del CMPX
1. Panoramica del sistema CMPX
1-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
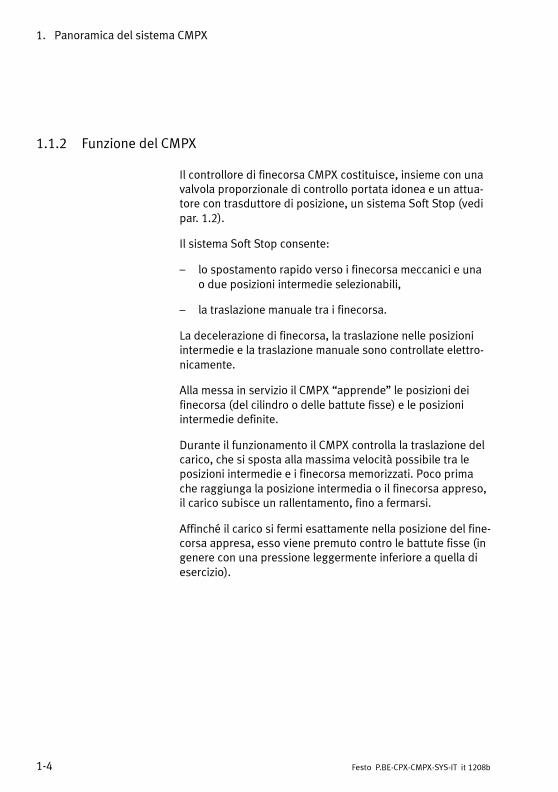
1.1.2 Funzione del CMPX
Il controllore di finecorsa CMPX costituisce, insieme con unavalvola proporzionale di controllo portata idonea e un attua-tore con trasduttore di posizione, un sistema Soft Stop (vedipar. 1.2).
Il sistema Soft Stop consente:
– lo spostamento rapido verso i finecorsa meccanici e unao due posizioni intermedie selezionabili,
– la traslazione manuale tra i finecorsa.
La decelerazione di finecorsa, la traslazione nelle posizioniintermedie e la traslazione manuale sono controllate elettro-nicamente.
Alla messa in servizio il CMPX “apprende” le posizioni deifinecorsa (del cilindro o delle battute fisse) e le posizioniintermedie definite.
Durante il funzionamento il CMPX controlla la traslazione delcarico, che si sposta alla massima velocità possibile tra leposizioni intermedie e i finecorsa memorizzati. Poco primache raggiunga la posizione intermedia o il finecorsa appreso,il carico subisce un rallentamento, fino a fermarsi.
Affinché il carico si fermi esattamente nella posizione del fine-corsa appresa, esso viene premuto contro le battute fisse (ingenere con una pressione leggermente inferiore a quella diesercizio).
1. Panoramica del sistema CMPX
1-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Vantaggi
Rispetto agli attuatori a battuta con azionamento mediantevalvole bistabili, questo procedimento di regolazione per-mette maggiori velocità di traslazione. Inoltre si eliminano leseguenti misure che, invece, sono necessarie per il comandodi un attuatore mediante una valvola ad impulsi:
– l’impiego di regolatori di portata,
– l’impiego di interruttori di fine corsa,
– l’impiego di deceleratori di finecorsa meccanici (ammor-tizzatori),
– la manutenzione delle battute fisse.
Rispetto agli attuatori a battuta con azionamento mediantevalvole bistabili, il CMPX permette:
– un numero di cicli macchina più elevato,
– minori vibrazioni dell’impianto,
– costi di manutenzione minori.

1. Panoramica del sistema CMPX
1-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Funzionamento
Compiti del CMPX Il CMPX svolge i seguenti compiti:
– rilevamento di dati caratteristici dei componenti collegati,
– memorizzazione delle posizioni intermedie e dei finecorsarichieste,
– definizione delle posizioni intermedie e dei finecorsa,
– comparazione tra valore reale e nominale, nonché regola-zione della posizione mediante comando della valvolaproporzionale di controllo portata (regolazione dellostato).
Funzionamento Il CMPX, la valvola, l’attuatore e il sistema di misura ven-gono collegati in modo da creare un circuito di regolazionechiuso. In tale circuito la posizione del carico in movimentocostituisce la grandezza regolata. Pertanto questa opera-zione viene anche definita controllo della posizione.
1.1.3 CMPX nel terminale CPX
Il CMPX è, in quanto modulo CPX, integrato in un terminaleCPX e viene comandato dal master CPX (nodo bus oppureFEC) attraverso il bus interno mediante 6 byte di dati di uscitamodulo e 6 byte di ingresso modulo, vedi par. 5.3.
Per informazioni su comando e parametrizzazione del CMPXattraverso il nodo bus CPX o il CPX-FEC consultare il capitolo 5.

1. Panoramica del sistema CMPX
1-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
1.2 Struttura di un sistema Soft Stop
Un sistema Soft Stop è composto in genere dai seguenticomponenti (vedi Fig. 1/2):
1 Terminale CPX conCMPX
2 Valvola proporzionaledi controllo portataVPWP
3 Interfaccia sensoricon linea del sistemadi misura (opzione,a seconda del si-stema di misura uti-lizzato)
4 Attuatore con tra-sduttore di posizione(qui DNCI)
5 Tubazione pneuma-tica
6 Linea assi
1 2 3 4
56
Fig. 1/2: Struttura del sistema Soft Stop
Per informazioni più dettagliate sulla struttura fare riferi-mento ai capitoli 2 e 3.

1. Panoramica del sistema CMPX
1-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
1.3 Possibilità di messa in funzione, parametrizzazionee programmazione mediante “teach-in”
La Tab. 1/5 mostra una panoramica sulle possibilità di messain funzione, parametrizzazione e programmazione mediante“teach-in”.
Comando con Vantaggi e svantaggi Per la descrizionevedi
Tasti operativie display
+ Possibilità di comando diretto “in loco” conmonitoraggio dell’attuatore
+ Nessuna necessità di accessori– Necessità di ripetere la parametrizzazione per
impianti dello stesso tipo
Paragrafo 4.4
Handheld CPX-MMI + Possibilità di comando diretto “in loco” con mo-nitoraggio dell’attuatore
+ Possibilità di accostamento alle posizioni 1 ... 4.– Necessità di ripetere la parametrizzazione per
impianti dello stesso tipo
Paragrafo 4.5
Master CPX(nodo bus CPXo CPX-FEC)
+ Possibilità di una comoda e veloce parametriz-zazione di più sistemi Soft Stop
+ Possibilità di accostamento alle posizioni 1 ... 4.– La messa in funzione e la programmazione
mediante “teach-in” richiedono misure supple-mentari poiché è necessario un monitoraggiodell’attuatore.
– Lavoro di programmazione aggiuntivo
Capitolo 5
Tab. 1/5: Possibilità di messa in funzione, parametrizzazione e programmazione me-diante “teach-in”
Montaggio e installazione dei componenti
pneumatici
2-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Capitolo 2
Montaggio e installazione dei componenti pneumatici
2. Montaggio e installazione dei componenti pneumatici
2-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
2.1 Indicazioni generali di montaggio e installazione 2-3. . . . . . . . . . . . . . . . . . . . . .
2.2 Smontaggio e montaggio del CMPX 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Montaggio dell’attuatore e del trasduttore di posizione 2-8. . . . . . . . . . . . . . . .
2.3.1 Requisiti generali dei componenti meccanici 2-9. . . . . . . . . . . . . . . . .
2.3.2 Attuatore e battute fisse 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.3 Trasduttore di posizione 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.4 Carico 2-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Montaggio della valvola proporzionale di controllo portata VPWP 2-18. . . . . . . .
2.5 Montaggio dell’interfaccia sensori CASM-... 2-21. . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Installazione dei componenti pneumatici 2-22. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.1 Alimentazione dell’aria compressa 2-22. . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.2 Filtro-riduttore 2-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.3 Serbatoio per aria compressa (opzione) 2-24. . . . . . . . . . . . . . . . . . . . .
2.6.4 Valvola proporzionale di controllo portata tipo VPWP-... 2-24. . . . . . . .
2.6.5 Tubi pneumatici e raccordi 2-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

2. Montaggio e installazione dei componenti pneumatici
2-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.1 Indicazioni generali di montaggio e installazione
AvvertenzaElevate forze di accelerazione degli attuatori collegati! Movi-menti involontari possono provocare collisioni con rischio digravi lesioni.
Movimenti pericolosi provocati da un comando errato degliattuatori collegati, ad es. dovuti a:
– cablaggio errato o imbrattato,
– errore di azionamento dei componenti,
– errori nei generatori dei valori di misura e di segnali,
– componenti guasti o non conformi alle direttive CEM,
– errori nel comando principale.
• Prima di eseguire lavori di montaggio, installazione e manu-tenzione, disinserire l’alimentazione dell’aria compressa edella tensione contemporaneamente o nel seguente ordine:1. alimentazione dell’aria compressa2. alimentazione di tensione dell’elettronica/dei sensori3. alimentazione della tensione di carico alle uscite/valvolePrima di eseguire qualsiasi lavoro nell’area operativa dellamacchina è necessario disinserire e bloccare l’alimentazionedi aria compressa e della tensione.
• Il disinserimento dell’aria compressa o della tensione dicarico non è una misura di bloccaggio adeguata. In caso diguasto può infatti verificarsi uno spostamento accidentaledell’attuatore.
• Si consiglia di inserire l’aria compressa solo dopo aver in-stallato e parametrizzato a regola d’arte il sistema.
• I freni di arresto comandati dal regolatore dell’attuatore nonsono sufficienti a garantire una protezione personale ade-guata!Assicurare gli assi verticali contro un’eventuale caduta oabbassamento in seguito al disinserimento dell’aria com-pressa e della tensione di carico mediante misure supple-mentari tipo:– bloccaggio meccanico dell’asse verticale,– dispositivo di frenatura/arresto/bloccaggio esterno
oppure– sufficiente compensazione dei pesi dell’asse.
2. Montaggio e installazione dei componenti pneumatici
2-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
AttenzionePericolo di lesioni in caso di manipolazione impropria ditubi sotto pressione!
Movimenti indesiderati degli attuatori collegati e movi-menti incontrollati delle tubazioni allentate possono deter-minare danni materiali o personali.
• Non disconnettere, non aprire e non recidere tubi sottopressione.
• Prima di smontare i tubi, è necessario sottoporli a sfiato(scarico dell’aria compressa).
• Usare equipaggiamenti di protezione idonei (ad esempioocchiali di protezione, calzature protettive, ecc.).
Per informazioni circa il montaggio del terminale CPX sirimanda alla descrizione del sistema CPX (P.BE-CPX-SYS-..).
NotaL’impiego di componenti non omologati per il funziona-mento con il CMPX può determinare il malfunzionamentodell’impianto.
Per installare e cablare il sistema impiegare esclusiva-mente componenti Festo compatibili e messi a punto spe-cificamente per questa destinazione d’uso.
Per il montaggio dei componenti attenersi alle relative istru-zioni contenute nelle istruzioni per l’uso allegate e alle avver-tenze riportate in questo capitolo.Solo in questo modo viene garantito un funzionamento per-fetto.
2. Montaggio e installazione dei componenti pneumatici
2-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
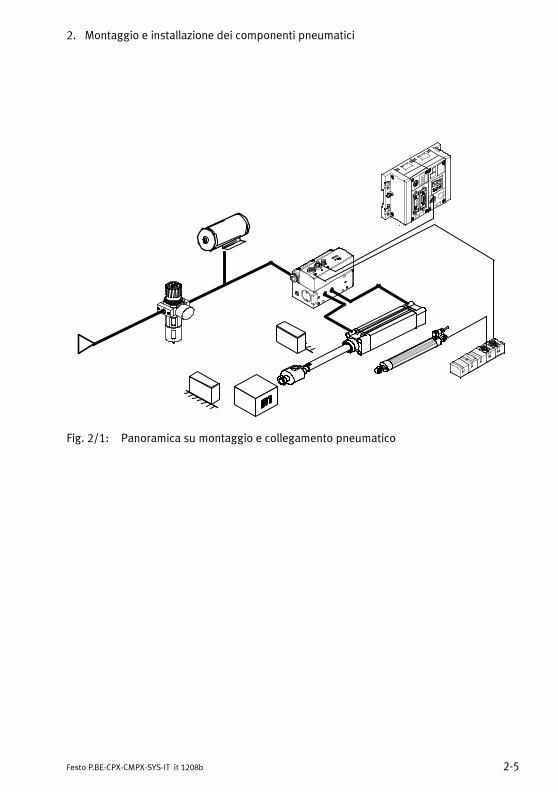
Fig. 2/1: Panoramica su montaggio e collegamento pneumatico
2. Montaggio e installazione dei componenti pneumatici
2-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.2 Smontaggio e montaggio del CMPX
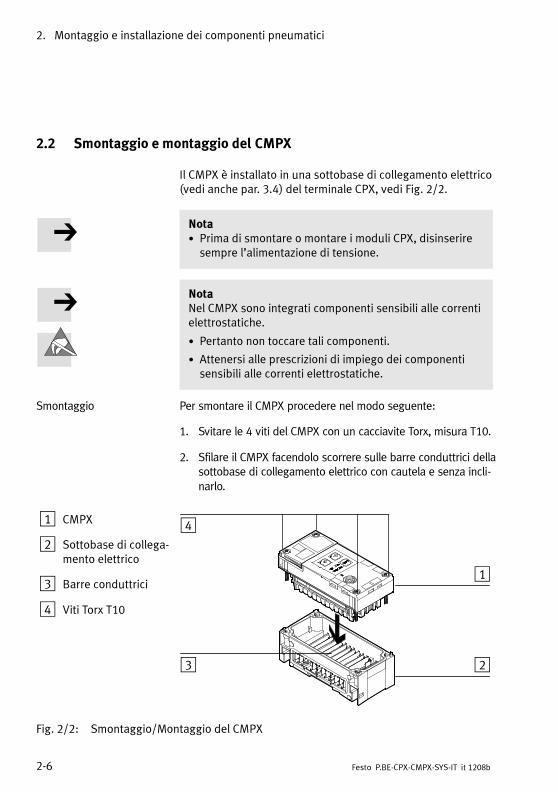
Il CMPX è installato in una sottobase di collegamento elettrico(vedi anche par. 3.4) del terminale CPX, vedi Fig. 2/2.
Nota• Prima di smontare o montare i moduli CPX, disinseriresempre l’alimentazione di tensione.
NotaNel CMPX sono integrati componenti sensibili alle correntielettrostatiche.
• Pertanto non toccare tali componenti.
• Attenersi alle prescrizioni di impiego dei componentisensibili alle correnti elettrostatiche.
Smontaggio Per smontare il CMPX procedere nel modo seguente:
1. Svitare le 4 viti del CMPX con un cacciavite Torx, misura T10.
2. Sfilare il CMPX facendolo scorrere sulle barre conduttrici dellasottobase di collegamento elettrico con cautela e senza incli-narlo.
1 CMPX
2 Sottobase di collega-mento elettrico
3 Barre conduttrici
4 Viti Torx T10
3
4
1
2
Fig. 2/2: Smontaggio/Montaggio del CMPX
2. Montaggio e installazione dei componenti pneumatici
2-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Montaggio Per il montaggio del CMPX procedere nel modo seguente:
1. Inserire il CMPX nella sottobase di collegamento elettrico.Verificare che le apposite scanalature con i morsetti pog-gino sulle barre conduttrici sul lato inferiore del CMPXaffinché sia garantita la presa di contatto.
2. Reinserire il CMPX nella sottobase di collegamento elet-trico con cautela e senza inclinarlo, fino alla battuta.
3. Stringere le viti solo manualmente. Per il serraggio delleviti utilizzare solamente il filetto già presente.
4. Per serrare le viti, utilizzare un cacciavite Torx misura T10e applicare una coppia di 0,9 ... 1,1 Nm.
La parametrizzazione e le posizioni programmate vengonomemorizzate nel CMPX. Dopo aver sostituito un CMPX con-trollare quindi i parametri ed eventualmente eseguire unanuova messa in funzione, vedi capitolo 4.A tale scopo osservare le indicazioni riportate nel par. A.3.
2. Montaggio e installazione dei componenti pneumatici
2-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.3 Montaggio dell’attuatore e del trasduttore di posizione
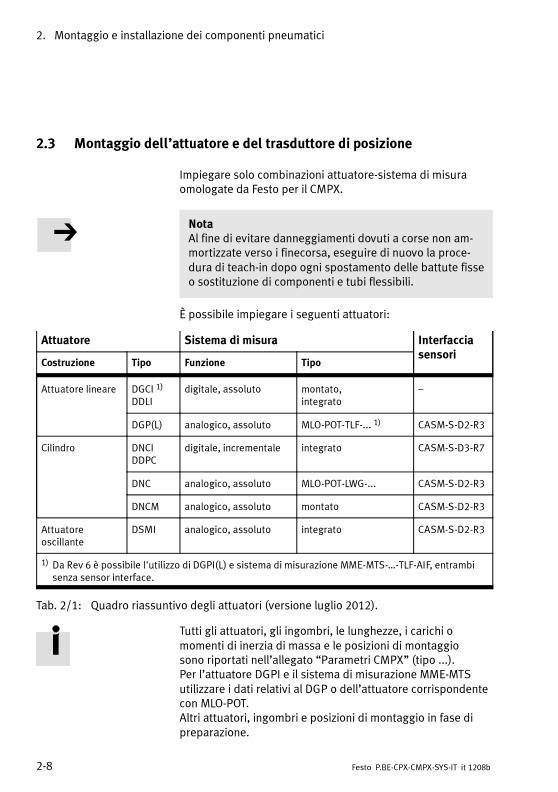
Impiegare solo combinazioni attuatore-sistema di misuraomologate da Festo per il CMPX.
NotaAl fine di evitare danneggiamenti dovuti a corse non am-mortizzate verso i finecorsa, eseguire di nuovo la proce-dura di teach-in dopo ogni spostamento delle battute fisseo sostituzione di componenti e tubi flessibili.
È possibile impiegare i seguenti attuatori:
Attuatore Sistema di misura Interfacciasensori
Costruzione Tipo Funzione Tipo
Attuatore lineare DGCI 1)
DDLIdigitale, assoluto montato,
integrato–
DGP(L) analogico, assoluto MLO-POT-TLF-... 1) CASM-S-D2-R3
Cilindro DNCIDDPC
digitale, incrementale integrato CASM-S-D3-R7
DNC analogico, assoluto MLO-POT-LWG-... CASM-S-D2-R3
DNCM analogico, assoluto montato CASM-S-D2-R3
Attuatoreoscillante
DSMI analogico, assoluto integrato CASM-S-D2-R3
1) Da Rev 6 è possibile l'utilizzo di DGPI(L) e sistema di misurazione MME-MTS-…-TLF-AIF, entrambisenza sensor interface.
Tab. 2/1: Quadro riassuntivo degli attuatori (versione luglio 2012).
Tutti gli attuatori, gli ingombri, le lunghezze, i carichi omomenti di inerzia di massa e le posizioni di montaggiosono riportati nell’allegato “Parametri CMPX” (tipo ...).Per l’attuatore DGPI e il sistema di misurazione MME-MTSutilizzare i dati relativi al DGP o dell’attuatore corrispondentecon MLO-POT.Altri attuatori, ingombri e posizioni di montaggio in fase dipreparazione.
2. Montaggio e installazione dei componenti pneumatici
2-9Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.3.1 Requisiti generali dei componenti meccanici
NotaCollegare attuatore, guida, sistema di misura e caricosenza gioco e allinearli reciprocamente con precisione.
Il gioco meccanico, ad es. tra stelo del cilindro e carico daspostare, provoca una cadenza del movimento irregolare(il regolatore deve far fronte a una “continua variazione delcarico” a causa del gioco).
NotaLa presenza di carichi trasversali altera i risultati dellemisurazioni e può danneggiare il sistema di misura.
• Utilizzare una guida esterna del carico utile per evitarecarichi trasversali sull’attuatore.
• Utilizzare elementi di fissaggio in grado di resistere alungo alle forze di accelerazione.
• Scegliere se necessario alimentazioni più potenti alloscopo di minimizzare l’influsso delle forze flettenti sulposizionamento.
NotaOsservare le indicazioni riportate nelle istruzioni per l’usodell’attuatore utilizzato. Assicurarsi che:
– la forza radiale ammesso,
– la forza assiale ammessa,
– i momenti di inerzia di massa ammessi,
– le velocità massime ammesse o le frequenze di oscilla-zione max. ammesse siano rispettate.
La decelerazione di finecorsa è regolata elettronicamente. Inrelazione al CMPX valgono speciali carichi o momenti di iner-zia di massa (vedi allegato “Parametri CMPX”).
2. Montaggio e installazione dei componenti pneumatici
2-10 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.3.2 Attuatore e battute fisse
Attuatore
NotaOsservare le indicazioni di montaggio riportate nelle istru-zioni per l’uso per quanto riguarda tutti gli attuatori.
NotaFare riferimento alle posizioni di montaggio ammesse perl’utilizzo con il CMPX. Solo in questo modo viene garantitoun funzionamento perfetto.
Attuatori e posizioni di montaggio ammessi dell’attuatoreutilizzato sono riportati nell’allegato per il prodotto “Para-metri CMPX”.
Ulteriori indicazioni speciali relative agli attuatori sono ripor-tate nella Tab. 2/2 (versione luglio 2012).
2. Montaggio e installazione dei componenti pneumatici
2-11Festo P.BE-CPX-CMPX-SYS-IT it 1208b
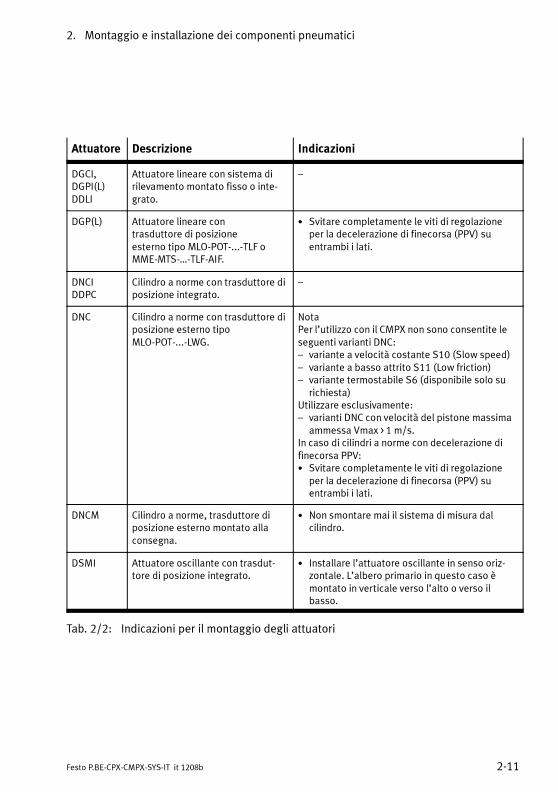
Attuatore Descrizione Indicazioni
DGCI,DGPI(L)DDLI
Attuatore lineare con sistema dirilevamento montato fisso o inte-grato.
–
DGP(L) Attuatore lineare contrasduttore di posizioneesterno tipo MLO-POT-...-TLF oMME-MTS-…-TLF-AIF.
• Svitare completamente le viti di regolazioneper la decelerazione di finecorsa (PPV) suentrambi i lati.
DNCIDDPC
Cilindro a norme con trasduttore diposizione integrato.
–
DNC Cilindro a norme con trasduttore diposizione esterno tipoMLO-POT-...-LWG.
NotaPer l’utilizzo con il CMPX non sono consentite leseguenti varianti DNC:– variante a velocità costante S10 (Slow speed)– variante a basso attrito S11 (Low friction)– variante termostabile S6 (disponibile solo su
richiesta)Utilizzare esclusivamente:– varianti DNC con velocità del pistone massima
ammessa Vmax > 1 m/s.In caso di cilindri a norme con decelerazione difinecorsa PPV:• Svitare completamente le viti di regolazione
per la decelerazione di finecorsa (PPV) suentrambi i lati.
DNCM Cilindro a norme, trasduttore diposizione esterno montato allaconsegna.
• Non smontare mai il sistema di misura dalcilindro.
DSMI Attuatore oscillante con trasdut-tore di posizione integrato.
• Installare l’attuatore oscillante in senso oriz-zontale. L’albero primario in questo caso èmontato in verticale verso l’alto o verso ilbasso.
Tab. 2/2: Indicazioni per il montaggio degli attuatori

2. Montaggio e installazione dei componenti pneumatici
2-12 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Battute fisse
A seconda dell’applicazione specifica e dell’attuatore utiliz-zato potrebbe essere necessario l’impiego di battute fisse.Queste svolgono le seguenti funzioni:
– definizione o impostazione dei finecorsa,
– protezione dell’attuatore o del trasduttore di posizione.
NotaDanni dovuti al raggiungimento dei finecorsa senza decele-razione.
• Dopo aver spostato le battute fisse o sostituito compo-nenti e tubi flessibili, ripetere la procedura di teach-in.
NotaDurante la procedura di teach-in e il funzionamento vieneesercitata una pressione contro le battute che può rag-giungere la pressione di esercizio.
• Assicurarsi che le battute fisse resistano a tale pressionein modo tale che i finecorsa possano essere rilevati esat-tamente durante la procedura di teach-in.
• Tutte le battute fisse devono essere indeformabili e ilmeno elastiche possibile.
• Non è consentito utilizzare gli ammortizzatori.
Utilizzare come battuta fissa battute esterne idonee o battutefisse Festo come indicato dalla Tab. 2/3.
Le informazioni relative al montaggio delle battute fisse Festosono riportate nelle istruzioni per l’uso dell’attuatore o nelleistruzioni di assemblaggio delle battute.

2. Montaggio e installazione dei componenti pneumatici
2-13Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Attuatore Battute fisse Indicazioni per il montaggio
DGCI – Battute originali integrate (finecorsaattuatore)
– Supporto ammortizzatore tipoDADP-DGC (senza ammortizzatore)con battute tipo KYC-...
– Battute fisse esterne idonee
• Le battute originali non devono esseresmontate.
• Osservare le indicazioni nelle istruzioniper l’uso!
DDLI Battute fisse esterne sulla slitta dimontaggio necessarie!
–
DGP(I)(L) – Supporto ammortizzatore tipo KYP-...(senza ammortizzatore)
– Battute fisse esterne idonee
–
DNCIDDPC
Battute fisse esterne necessarie! • L’utilizzo di tutta la lunghezza dell’attua-tore senza battute fisse provoca la defor-mazione dei dischi di decelerazione in-terni. Ciò può causare irregolarità di fun-zionamento!
DNC Battute fisse esterne necessarie! • L’utilizzo dell’intera lunghezza dell’attua-tore può causare anomalie.
• Montare le battute fisse in modo che ladistanza dal finecorsa dell’attuatore sia dialmeno 0,5 mm!
DNCM Battute fisse esterne necessarie!
DSMI – Battute originali integrate (finecorsaattuatore)
– Battute fisse esterne idonee
• Osservare le indicazioni nelle istruzioniper l’uso!
• Accertarsi che sulla leva di arresto nonsiano montati dispositivi paracolpi.
Tab. 2/3: Indicazioni per il montaggio delle battute fisse
2. Montaggio e installazione dei componenti pneumatici
2-14 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
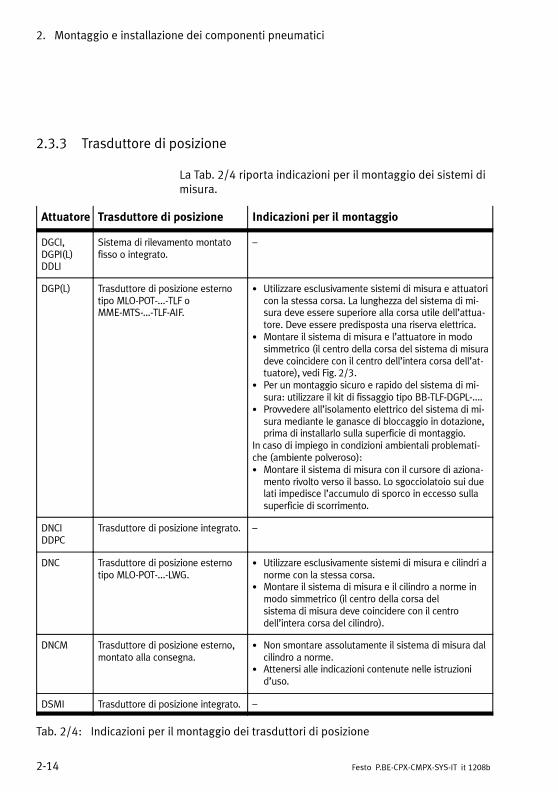
2.3.3 Trasduttore di posizione
La Tab. 2/4 riporta indicazioni per il montaggio dei sistemi dimisura.
Attuatore Trasduttore di posizione Indicazioni per il montaggio
DGCI,DGPI(L)DDLI
Sistema di rilevamento montatofisso o integrato.
–
DGP(L) Trasduttore di posizione esternotipo MLO-POT-...-TLF oMME-MTS-…-TLF-AIF.
• Utilizzare esclusivamente sistemi di misura e attuatoricon la stessa corsa. La lunghezza del sistema di mi-sura deve essere superiore alla corsa utile dell’attua-tore. Deve essere predisposta una riserva elettrica.
• Montare il sistema di misura e l’attuatore in modosimmetrico (il centro della corsa del sistema di misuradeve coincidere con il centro dell’intera corsa dell’at-tuatore), vedi Fig. 2/3.
• Per un montaggio sicuro e rapido del sistema di mi-sura: utilizzare il kit di fissaggio tipo BB-TLF-DGPL-....
• Provvedere all’isolamento elettrico del sistema di mi-sura mediante le ganasce di bloccaggio in dotazione,prima di installarlo sulla superficie di montaggio.
In caso di impiego in condizioni ambientali problemati-che (ambiente polveroso):• Montare il sistema di misura con il cursore di aziona-
mento rivolto verso il basso. Lo sgocciolatoio sui duelati impedisce l’accumulo di sporco in eccesso sullasuperficie di scorrimento.
DNCIDDPC
Trasduttore di posizione integrato. –
DNC Trasduttore di posizione esternotipo MLO-POT-...-LWG.
• Utilizzare esclusivamente sistemi di misura e cilindri anorme con la stessa corsa.
• Montare il sistema di misura e il cilindro a norme inmodo simmetrico (il centro della corsa delsistema di misura deve coincidere con il centrodell’intera corsa del cilindro).
DNCM Trasduttore di posizione esterno,montato alla consegna.
• Non smontare assolutamente il sistema di misura dalcilindro a norme.
• Attenersi alle indicazioni contenute nelle istruzionid’uso.
DSMI Trasduttore di posizione integrato. –
Tab. 2/4: Indicazioni per il montaggio dei trasduttori di posizione
2. Montaggio e installazione dei componenti pneumatici
2-15Festo P.BE-CPX-CMPX-SYS-IT it 1208b
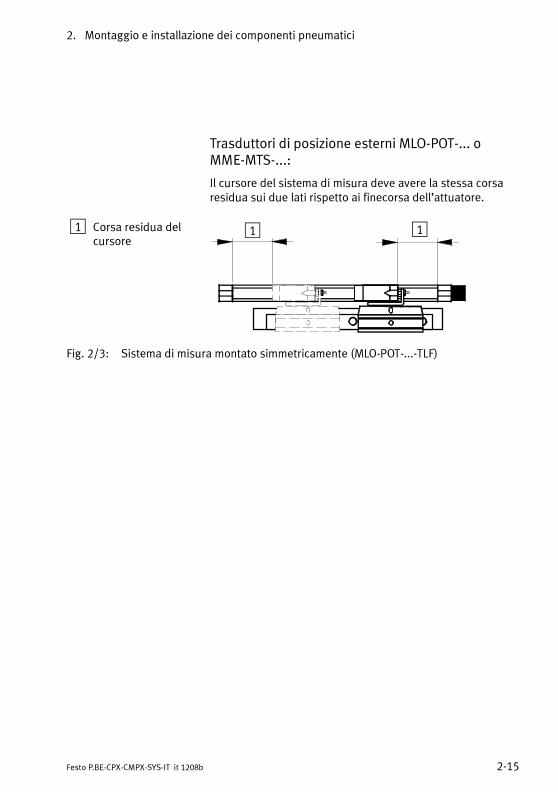
Trasduttori di posizione esterni MLO-POT-... oMME-MTS-...:
Il cursore del sistema di misura deve avere la stessa corsaresidua sui due lati rispetto ai finecorsa dell’attuatore.
1 Corsa residua delcursore
1 1
Fig. 2/3: Sistema di misura montato simmetricamente (MLO-POT-...-TLF)
2. Montaggio e installazione dei componenti pneumatici
2-16 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.3.4 Carico
Tutti gli attuatori, gli ingombri, le lunghezze, i carichi omomenti di inerzia di massa e le posizioni di montaggiosono riportati nell’allegato “Parametri CMPX” (tipo ...).
• Montare il carico senza gioco, eventualmente con laguida.
Indicazioni relative al giunto (attuatori a stelo)
Se tra lo stelo e la guida è necessario un giunto:
• Verificare il gioco del giunto.A tale scopo vale: gioco del giunto ≤ 0,05 mm
• Se necessario, regolare adeguatamente il gioco delgiunto.
Un gioco eccessivo del giunto può impedire il completamentodella procedura di teach-in. Un gioco eccessivo del giuntodetermina:
– produzione di rumori dovuta a urti sul giunto
– maggiore usura del giunto
– peggioramento delle caratteristiche di scorrimento.
Accertarsi che il gioco del giunto non superi 0,05 mm.
Raccomandazione: Utilizzare ad es. i giunti tipo KSZ-M...di Festo.
Indicazioni relative al giunto(attuatori lineari senza stelo senza guida)
Per DDLI o DGP(I):Utilizzare il giunto di compensazione DARD di Festo.
2. Montaggio e installazione dei componenti pneumatici
2-17Festo P.BE-CPX-CMPX-SYS-IT it 1208b
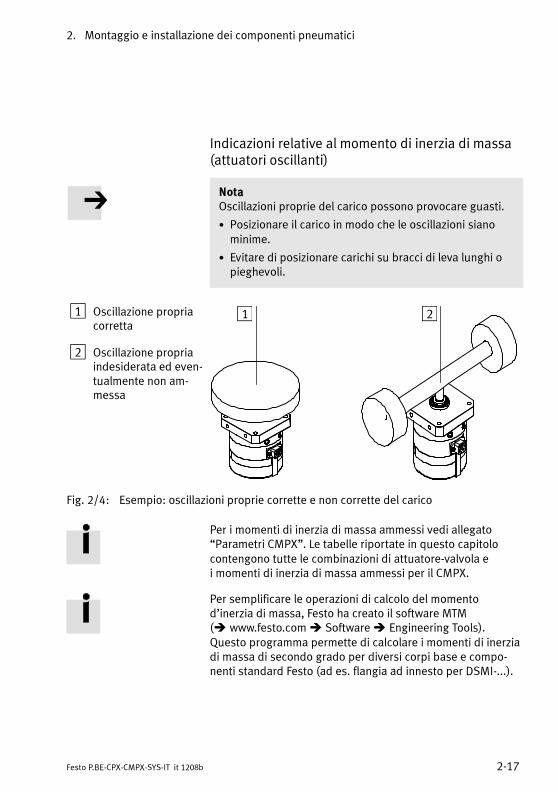
Indicazioni relative al momento di inerzia di massa(attuatori oscillanti)
NotaOscillazioni proprie del carico possono provocare guasti.
• Posizionare il carico in modo che le oscillazioni sianominime.
• Evitare di posizionare carichi su bracci di leva lunghi opieghevoli.
1 Oscillazione propriacorretta
2 Oscillazione propriaindesiderata ed even-tualmente non am-messa
1 2
Fig. 2/4: Esempio: oscillazioni proprie corrette e non corrette del carico
Per i momenti di inerzia di massa ammessi vedi allegato“Parametri CMPX”. Le tabelle riportate in questo capitolocontengono tutte le combinazioni di attuatore-valvola ei momenti di inerzia di massa ammessi per il CMPX.
Per semplificare le operazioni di calcolo del momentod’inerzia di massa, Festo ha creato il software MTM(� www.festo.com� Software� Engineering Tools).Questo programma permette di calcolare i momenti di inerziadi massa di secondo grado per diversi corpi base e compo-nenti standard Festo (ad es. flangia ad innesto per DSMI-...).

2. Montaggio e installazione dei componenti pneumatici
2-18 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.4 Montaggio della valvola proporzionale di controllo portata VPWP
Montare la valvola proporzionale di controllo portata VPWP suuna superficie piana con due viti M3 e una rondella di sicurezzaciascuna, vedi Fig. 2/5. Coppia di serraggio: 1,5 Nm ±10 %
1 Viti M3 con rondelladi sicurezza
2 Connessione messaa terra (vedi par. 3.1) 1
2
1
Fig. 2/5: Montaggio della VPWP
In caso di montaggio su parti mobili:
• Montare la VPWP in senso trasversale rispetto alla dire-zione di movimento. In questo modo le forze di accelera-zione non incidono sulla posizione della spola della val-vola.
1 Montaggio in posi-zione trasversale ri-spetto alla direzionedi movimento
2 Non ammesso:montaggio nella dire-zione di movimento
3 Valvola proporzionaledi controllo portataVPWP
1 2
3
Fig. 2/6: Montaggio della VPWP su parti mobili
2. Montaggio e installazione dei componenti pneumatici
2-19Festo P.BE-CPX-CMPX-SYS-IT it 1208b
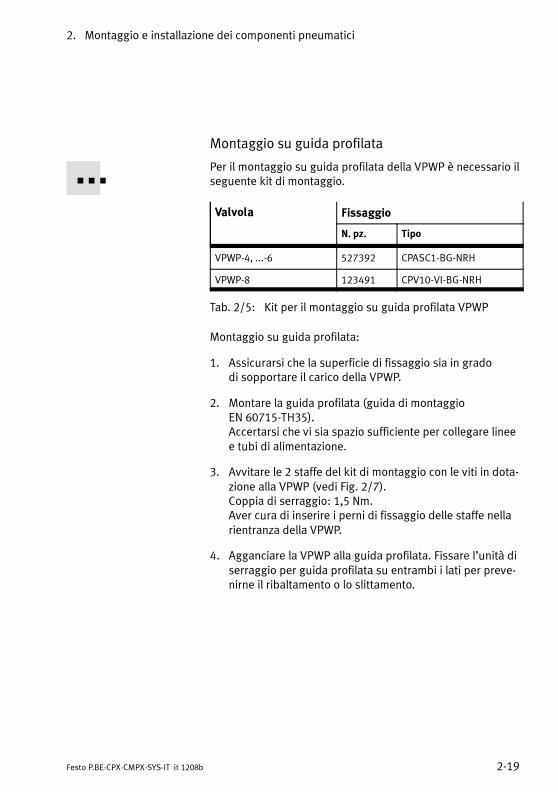
Montaggio su guida profilata
Per il montaggio su guida profilata della VPWP è necessario ilseguente kit di montaggio.
Valvola Fissaggio
N. pz. Tipo
VPWP-4, ...-6 527392 CPASC1-BG-NRH
VPWP-8 123491 CPV10-VI-BG-NRH
Tab. 2/5: Kit per il montaggio su guida profilata VPWP
Montaggio su guida profilata:
1. Assicurarsi che la superficie di fissaggio sia in gradodi sopportare il carico della VPWP.
2. Montare la guida profilata (guida di montaggioEN 60715-TH35).Accertarsi che vi sia spazio sufficiente per collegare lineee tubi di alimentazione.
3. Avvitare le 2 staffe del kit di montaggio con le viti in dota-zione alla VPWP (vedi Fig. 2/7).Coppia di serraggio: 1,5 Nm.Aver cura di inserire i perni di fissaggio delle staffe nellarientranza della VPWP.
4. Agganciare la VPWP alla guida profilata. Fissare l’unità diserraggio per guida profilata su entrambi i lati per preve-nirne il ribaltamento o lo slittamento.

2. Montaggio e installazione dei componenti pneumatici
2-20 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
1 Perno di fissaggio(nella VPWP-8 sitrova in basso)
2 Vite M4x10
3 Guida profilata
4 Unità di serraggioguida profilata
1
2
3
4
Fig. 2/7: Montaggio della VPWP su guida profilata
2. Montaggio e installazione dei componenti pneumatici
2-21Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.5 Montaggio dell’interfaccia sensori CASM-...
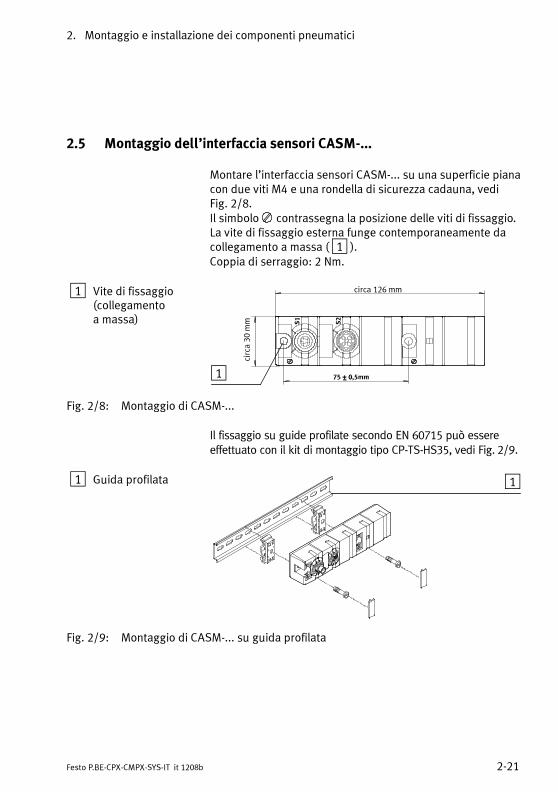
Montare l’interfaccia sensori CASM-... su una superficie pianacon due viti M4 e una rondella di sicurezza cadauna, vediFig. 2/8.Il simbolo contrassegna la posizione delle viti di fissaggio.La vite di fissaggio esterna funge contemporaneamente dacollegamento a massa (1 ).Coppia di serraggio: 2 Nm.
1 Vite di fissaggio(collegamentoa massa) S
1
S2
1
circa 126 mm
circa30mm
Fig. 2/8: Montaggio di CASM-...
Il fissaggio su guide profilate secondo EN 60715 può essereeffettuato con il kit di montaggio tipo CP-TS-HS35, vedi Fig. 2/9.
1 Guida profilata 1
Fig. 2/9: Montaggio di CASM-... su guida profilata
2. Montaggio e installazione dei componenti pneumatici
2-22 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.6 Installazione dei componenti pneumatici
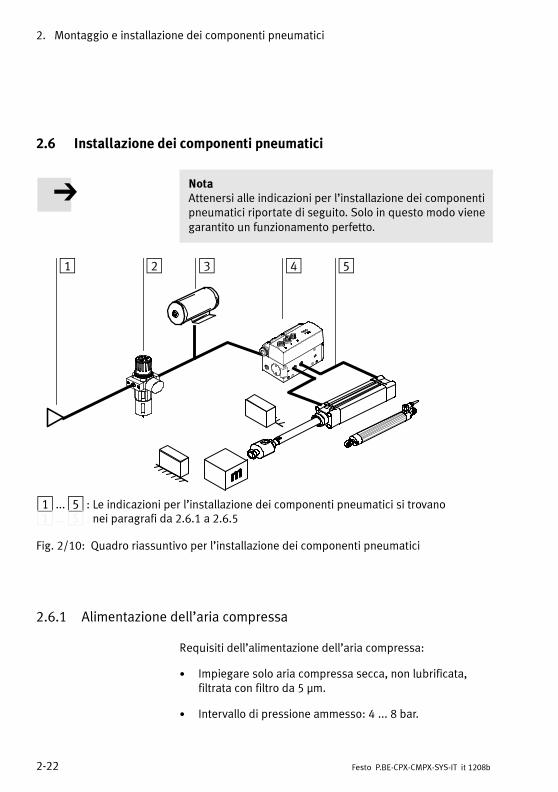
NotaAttenersi alle indicazioni per l’installazione dei componentipneumatici riportate di seguito. Solo in questo modo vienegarantito un funzionamento perfetto.
1 2 3 4 5
1 ...5 : Le indicazioni per l’installazione dei componenti pneumatici si trovano1 ...5 : nei paragrafi da 2.6.1 a 2.6.5
Fig. 2/10: Quadro riassuntivo per l’installazione dei componenti pneumatici
2.6.1 Alimentazione dell’aria compressa
Requisiti dell’alimentazione dell’aria compressa:
• Impiegare solo aria compressa secca, non lubrificata,filtrata con filtro da 5 μm.
• Intervallo di pressione ammesso: 4 ... 8 bar.
2. Montaggio e installazione dei componenti pneumatici
2-23Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.6.2 Filtro-riduttore
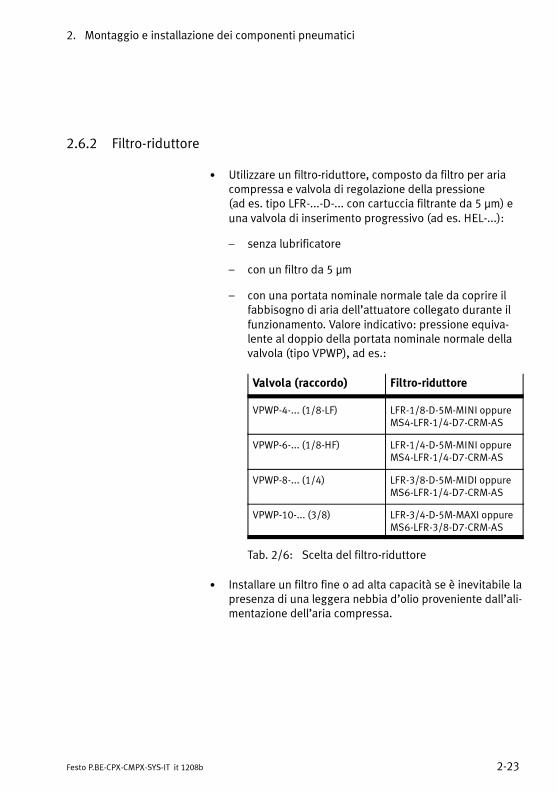
• Utilizzare un filtro-riduttore, composto da filtro per ariacompressa e valvola di regolazione della pressione(ad es. tipo LFR-...-D-... con cartuccia filtrante da 5 ìm) euna valvola di inserimento progressivo (ad es. HEL-...):
– senza lubrificatore
– con un filtro da 5 μm
– con una portata nominale normale tale da coprire ilfabbisogno di aria dell’attuatore collegato durante ilfunzionamento. Valore indicativo: pressione equiva-lente al doppio della portata nominale normale dellavalvola (tipo VPWP), ad es.:
Valvola (raccordo) Filtro-riduttore
VPWP-4-... (1/8-LF) LFR-1/8-D-5M-MINI oppureMS4-LFR-1/4-D7-CRM-AS
VPWP-6-... (1/8-HF) LFR-1/4-D-5M-MINI oppureMS4-LFR-1/4-D7-CRM-AS
VPWP-8-... (1/4) LFR-3/8-D-5M-MIDI oppureMS6-LFR-1/4-D7-CRM-AS
VPWP-10-... (3/8) LFR-3/4-D-5M-MAXI oppureMS6-LFR-3/8-D7-CRM-AS
Tab. 2/6: Scelta del filtro-riduttore
• Installare un filtro fine o ad alta capacità se è inevitabile lapresenza di una leggera nebbia d’olio proveniente dall’ali-mentazione dell’aria compressa.
2. Montaggio e installazione dei componenti pneumatici
2-24 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.6.3 Serbatoio per aria compressa (opzione)
Se il posizionamento non soddisfa le esigenze operative e se,durante la traslazione, si rilevano fluttuazioni della pressionesuperiori a 1 bar nel punto di rilevamento della pressione:
• Installare un serbatoio per aria compressa (ad es. tipoVZS-...-B) tra il filtro-riduttore e la valvola proporzionaledi controllo portata.
Tale soluzione riduce le fluttuazioni della pressione durantela traslazione. Eventualmente è possibile compensare leggerisuperamenti della fluttuazione ammessa impiegando unalinea di alimentazione di sezione maggiore.
Capacità del serbatoio Il serbatoio dovrebbe avere una capacità almeno quadruplarispetto al volume dell’attuatore impiegato.VP = 4 * VZ VP = volume del serbatoio
VZ = volume del cilindro(attuatori lineari: VZ = r2 * ð* LZ)
LZ = lunghezza della corsa del cilindro
2.6.4 Valvola proporzionale di controllo portata tipo VPWP-...
Collocare la tubazione tra la valvola (VPWP) e l’attuatore inmodo simmetrico.
Raccomandazione per attuatori lineari e attuatori con stelo:lunghezza del tubo = lunghezza del cilindro.
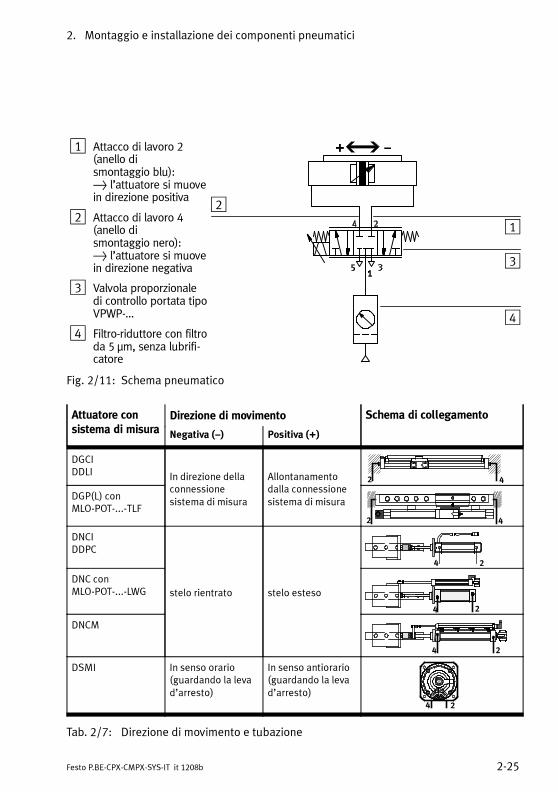
La Fig. 2/11 è una rappresentazione schematica del collega-mento con tubi di un cilindro (esempio) alla VPWP.
2. Montaggio e installazione dei componenti pneumatici
2-25Festo P.BE-CPX-CMPX-SYS-IT it 1208b
1 Attacco di lavoro 2(anello dismontaggio blu):} l’attuatore si muovein direzione positiva
2 Attacco di lavoro 4(anello dismontaggio nero):} l’attuatore si muovein direzione negativa
3 Valvola proporzionaledi controllo portata tipoVPWP-...
4 Filtro-riduttore con filtroda 5 μm, senza lubrifi-catore
1
2
–+
3
4
Fig. 2/11: Schema pneumatico
Attuatore consistema di misura
Direzione di movimento Schema di collegamento
Negativa (–) Positiva (+)
DGCIDDLI In direzione della
connessionesistema di misura
Allontanamentodalla connessionesistema di misura
2 4
DGP(L) conMLO-POT-...-TLF
2 4
DNCIDDPC
stelo rientrato stelo esteso
4 2
DNC conMLO-POT-...-LWG
4 2
DNCM
4 2
DSMI In senso orario(guardando la levad’arresto)
In senso antiorario(guardando la levad’arresto)
4 2
Tab. 2/7: Direzione di movimento e tubazione
2. Montaggio e installazione dei componenti pneumatici
2-26 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Collegamento delle tubazioni per DGCI, DDLI, DDPCe DSMI-...-B
Quando si ordina il DGCI, DDLI, DDPC con raccordi – standard(non in versione modulare) oppure in versione sistemamodulare “QD” o “QR” nonché per DSMI-...-B:I raccordi sulla valvola e sull’attuatore hanno anelli di smon-taggio colorati.
• Collegare gli attacchi con l’anello di smontaggio blu aquelli con l’anello di smontaggio nero.
Silenziatore
La VPWP è disponibile con silenziatore a piastra integrato
Per l’uso della VPWP senza silenziatore a piastra:
• Con l’ausilio di tubi flessibili installare silenziatori conportata nominale elevata, ad es. UC-M5, U-1/8, U-1/4oppure U-3/8 (a seconda del tipo di valvola) oppure
• Convogliare l’aria di scarico in un serbatoio per aria com-pressa piccolo e svuotare quest’ultimo con un silenziatoregrande. Accertarsi che la tubazione e i raccordi a vite ab-biamo una portata sufficiente (usando tubi flessibili menolunghi possibile).
Se il dimensionamento è giusto è possibile una riduzione deirumori di scarico.

2. Montaggio e installazione dei componenti pneumatici
2-27Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indicazioni per il riallestimento di impianti
Per il riallestimento di impianti è per lo più opportuno conti-nuare a utilizzare gli attuatori esistenti. Spesso sono disponi-bili solo attuatori con attacco dell’aria su un solo lato, e anchela corsa di decelerazione (PPV) viene impiegata come corsadell’attuatore.
È possibile che non si riesca ad ottenere del tutto il tempo ditraslazione specificato.
I tempi di traslazione e il funzionamento ottimale del sistemasono garantiti solo a condizione che l’installazione venga ese-guita esattamente secondo le modalità descritte.
Attuatori con alimentazione pneumatica unilaterale
Per l’uso di attuatori con alimentazione pneumatica unilate-rale attenersi a quanto segue:
– Utilizzare l’attacco di alimentazione aria unilaterale soloper cilindri o attuatori con una corsa ≤ 600 mm.
– Quando l’alimentazione avviene attraverso l’attacco 4della valvola proporzionale di controllo portata, l’attua-tore deve muoversi in direzione negativa. Se avviene at-traverso l’attacco 2, l’attuatore deve muoversi in dire-zione positiva. In alcuni casi la direzione di movimentoviene indicata dalle frecce riportate sull’attuatore.
– I tempi di traslazione che ne risultano possono variare aseconda della direzione della corsa.
2. Montaggio e installazione dei componenti pneumatici
2-28 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2.6.5 Tubi pneumatici e raccordi
• Utilizzare esclusivamente raccordi filettati diritti. Se è ine-vitabile l’impiego di raccordi a gomito, impiegare raccordiad innesto della serie Quick Star.
• Scegliere tubi pneumatici e raccordi dimensionati comeindicato nell’allegato “Parametri CMPX”.
• Collocare la tubazione tra la valvola (VPWP) e l’attuatorein modo simmetrico.
• Impiegare solo tubi pneumatici e raccordi filettati puliti.
• Non utilizzare regolatori di portata né valvole unidirezio-nali nelle linee di alimentazione.
• I tubi flessibili posati non devono sporgere all’internodell’area di traslazione.
Per garantire l’efficienza dell’attuatore, durante il funziona-mento sono ammesse fluttuazioni della pressione pari amax. 1 bar a monte della valvola proporzionale di controlloportata. Per controllare la stabilità della pressione di alimen-tazione è eventualmente possibile prevedere un punto dirilevamento della pressione a monte della valvola proporzio-nale di controllo portata.
Scegliere se necessario alimentazioni più potenti allo scopodi minimizzare l’influsso delle forze flettenti sul posiziona-mento.

Collegamenti elettrici
3-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Capitolo 3
Collegamenti elettrici
3. Collegamenti elettrici
3-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
3.1 Messa a terra 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Connessione assi 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Moduli e lunghezze delle linee ammessi 3-6. . . . . . . . . . . . . . . . . . . . .
3.2.2 Valvola proporzionale di controllo portata VPWP 3-7. . . . . . . . . . . . . .
3.2.3 Interfaccia sensori CASM 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Garanzia del grado di protezione IP65/IP67 3-11. . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Alimentazione di tensione 3-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Determinazione dell’assorbimento di corrente 3-13. . . . . . . . . . . . . . . .
3.4.2 Principio di alimentazione elettrica –Formazione di zone di tensione 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.3 Principio di alimentazione elettrica –Disinserimento della tensione di carico 3-18. . . . . . . . . . . . . . . . . . . . . .
3. Collegamenti elettrici
3-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
L’alimentazione di tensione del CMPX avviene attraverso ilterminale CPX, vedi par. 3.4.
3.1 Messa a terra
La messa a terra del CMPX avviene attraverso il terminaleCPX, vedi descrizione del sistema CPX.
Prestare attenzione a eventuali misure di messa a terradescritte di seguito in riferimento ai componenti utilizzati.
NotaAnomalia di funzionamento in caso di messa a terra sba-gliata o assente.
• Realizzare un collegamento a basso valore ohmico (uti-lizzando un cavo corto di sezione grande) tra gli attacchispecificati e il potenziale di terra.
Se non diversamente indicato, per i cavi di messa a terra valequanto segue:
– Sezione di cavo min. 2,5 mm2
– Lunghezza dei cavi ridotta al minimo possibile(norm. 20 ... 30 cm)
Messa a terra della VPWP
• Realizzare la connessione messa a terra della VPWP con ilpotenziale di terra del terminale CPX, vedi anche par. 2.4,Fig. 2/5.Utilizzare la vite maschiante in dotazione.
Messa a terra dell’interfaccia sensori
In caso di utilizzo di un’interfaccia sensori:
• Realizzare un collegamento a basso valore ohmico tra laconnessione messa a terra dell’interfaccia sensori e ilpotenziale di terra del terminale CPX.
3. Collegamenti elettrici
3-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
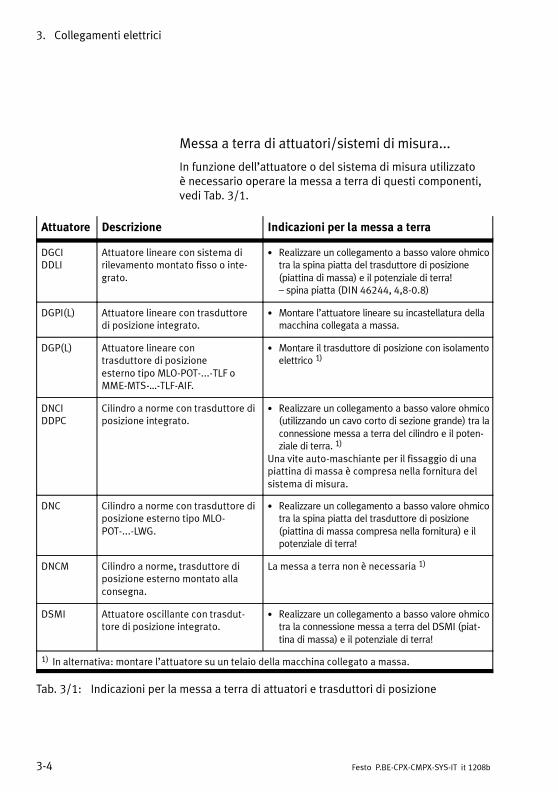
Messa a terra di attuatori/sistemi di misura...
In funzione dell’attuatore o del sistema di misura utilizzatoè necessario operare la messa a terra di questi componenti,vedi Tab. 3/1.
Attuatore Descrizione Indicazioni per la messa a terra
DGCIDDLI
Attuatore lineare con sistema dirilevamento montato fisso o inte-grato.
• Realizzare un collegamento a basso valore ohmicotra la spina piatta del trasduttore di posizione(piattina di massa) e il potenziale di terra!– spina piatta (DIN 46244, 4,8-0.8)
DGPI(L) Attuatore lineare con trasduttoredi posizione integrato.
• Montare l’attuatore lineare su incastellatura dellamacchina collegata a massa.
DGP(L) Attuatore lineare contrasduttore di posizioneesterno tipo MLO-POT-...-TLF oMME-MTS-…-TLF-AIF.
• Montare il trasduttore di posizione con isolamentoelettrico 1)
DNCIDDPC
Cilindro a norme con trasduttore diposizione integrato.
• Realizzare un collegamento a basso valore ohmico(utilizzando un cavo corto di sezione grande) tra laconnessione messa a terra del cilindro e il poten-ziale di terra. 1)
Una vite auto-maschiante per il fissaggio di unapiattina di massa è compresa nella fornitura delsistema di misura.
DNC Cilindro a norme con trasduttore diposizione esterno tipo MLO-POT-...-LWG.
• Realizzare un collegamento a basso valore ohmicotra la spina piatta del trasduttore di posizione(piattina di massa compresa nella fornitura) e ilpotenziale di terra!
DNCM Cilindro a norme, trasduttore diposizione esterno montato allaconsegna.
La messa a terra non è necessaria 1)
DSMI Attuatore oscillante con trasdut-tore di posizione integrato.
• Realizzare un collegamento a basso valore ohmicotra la connessione messa a terra del DSMI (piat-tina di massa) e il potenziale di terra!
1) In alternativa: montare l’attuatore su un telaio della macchina collegato a massa.
Tab. 3/1: Indicazioni per la messa a terra di attuatori e trasduttori di posizione
3. Collegamenti elettrici
3-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
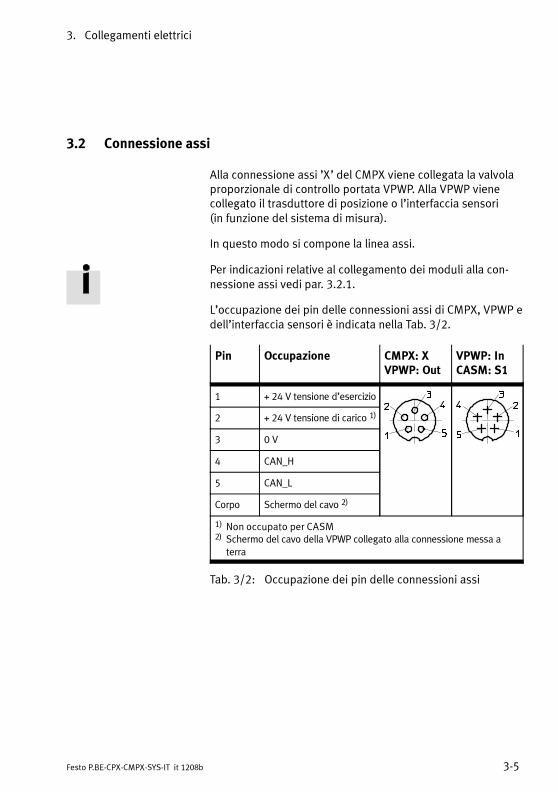
3.2 Connessione assi
Alla connessione assi ’X’ del CMPX viene collegata la valvolaproporzionale di controllo portata VPWP. Alla VPWP vienecollegato il trasduttore di posizione o l’interfaccia sensori(in funzione del sistema di misura).
In questo modo si compone la linea assi.
Per indicazioni relative al collegamento dei moduli alla con-nessione assi vedi par. 3.2.1.
L’occupazione dei pin delle connessioni assi di CMPX, VPWP edell’interfaccia sensori è indicata nella Tab. 3/2.
Pin Occupazione CMPX: XVPWP: Out
VPWP: InCASM: S1
1 + 24 V tensione d’esercizio
2 + 24 V tensione di carico 1)
3 0 V
4 CAN_H
5 CAN_L
Corpo Schermo del cavo 2)
1) Non occupato per CASM2) Schermo del cavo della VPWP collegato alla connessione messa a
terra
Tab. 3/2: Occupazione dei pin delle connessioni assi
3. Collegamenti elettrici
3-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3.2.1 Moduli e lunghezze delle linee ammessi
Lunghezza max. ammessa della linea assi: 30 m (lunghezzacomplessiva CMPX – VPWP – interfaccia sensori o sistema dimisura).
Cavo di collegamento Lunghezza Tipo
Cavo di collegamento WS-WD, connettoreangolare – connettore femmina angolare
0,25 m KVI-CP-3-WS-WD-0,25
0,5 m KVI-CP-3-WS-WD-0,5
2 m KVI-CP-3-WS-WD-2
5 m KVI-CP-3-WS-WD-5
8 m KVI-CP-3-WS-WD-8
Cavo di collegamento GS-GD, connettoremaschio diritto – connettore femminadiritto
2 m KVI-CP-3-GS-GD-2
5 m KVI-CP-3-GS-GD-5
8 m KVI-CP-3-GS-GD-8
Raccordo, per il passaggio nell’armadio dicomando
– KVI-CP-3-SSD
Tab. 3/3: Panoramica linee tra CMPX, VPWP, interfaccia sensori, sistema di misura
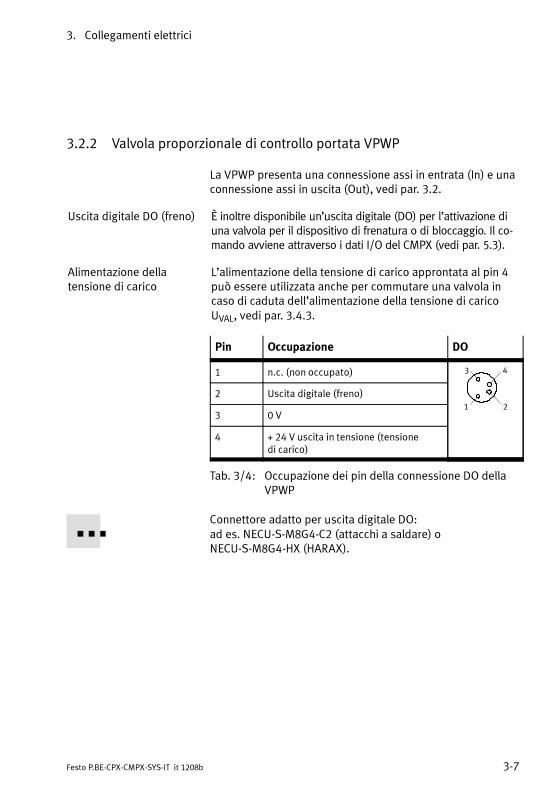
3. Collegamenti elettrici
3-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3.2.2 Valvola proporzionale di controllo portata VPWP
La VPWP presenta una connessione assi in entrata (In) e unaconnessione assi in uscita (Out), vedi par. 3.2.
Uscita digitale DO (freno) È inoltre disponibile un’uscita digitale (DO) per l’attivazione diuna valvola per il dispositivo di frenatura o di bloccaggio. Il co-mando avviene attraverso i dati I/O del CMPX (vedi par. 5.3).
Alimentazione dellatensione di carico
L’alimentazione della tensione di carico approntata al pin 4può essere utilizzata anche per commutare una valvola incaso di caduta dell’alimentazione della tensione di caricoUVAL, vedi par. 3.4.3.
Pin Occupazione DO
1 n.c. (non occupato) 4
2
3
1
2 Uscita digitale (freno)
3 0 V
4 + 24 V uscita in tensione (tensionedi carico)
Tab. 3/4: Occupazione dei pin della connessione DO dellaVPWP
Connettore adatto per uscita digitale DO:ad es. NECU-S-M8G4-C2 (attacchi a saldare) oNECU-S-M8G4-HX (HARAX).
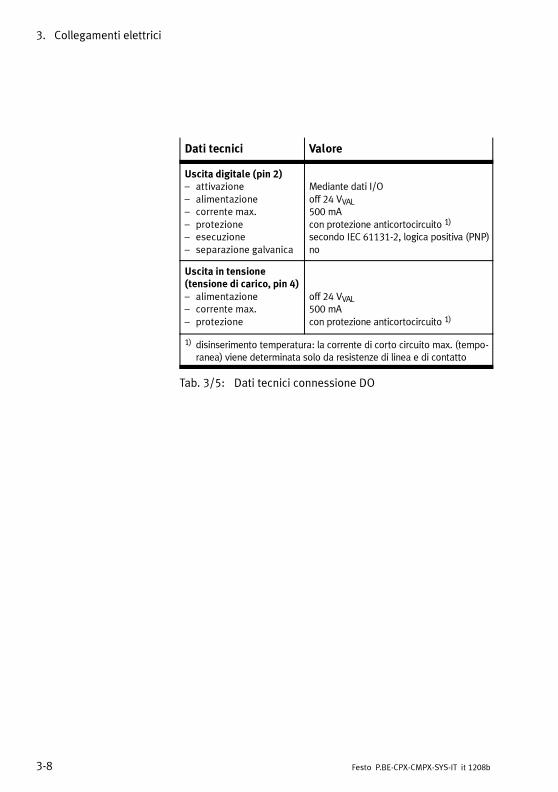
3. Collegamenti elettrici
3-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Dati tecnici Valore
Uscita digitale (pin 2)– attivazione– alimentazione– corrente max.– protezione– esecuzione– separazione galvanica
Mediante dati I/Ooff 24 VVAL500 mAcon protezione anticortocircuito 1)
secondo IEC 61131-2, logica positiva (PNP)no
Uscita in tensione(tensione di carico, pin 4)– alimentazione– corrente max.– protezione
off 24 VVAL500 mAcon protezione anticortocircuito 1)
1) disinserimento temperatura: la corrente di corto circuito max. (tempo-ranea) viene determinata solo da resistenze di linea e di contatto
Tab. 3/5: Dati tecnici connessione DO
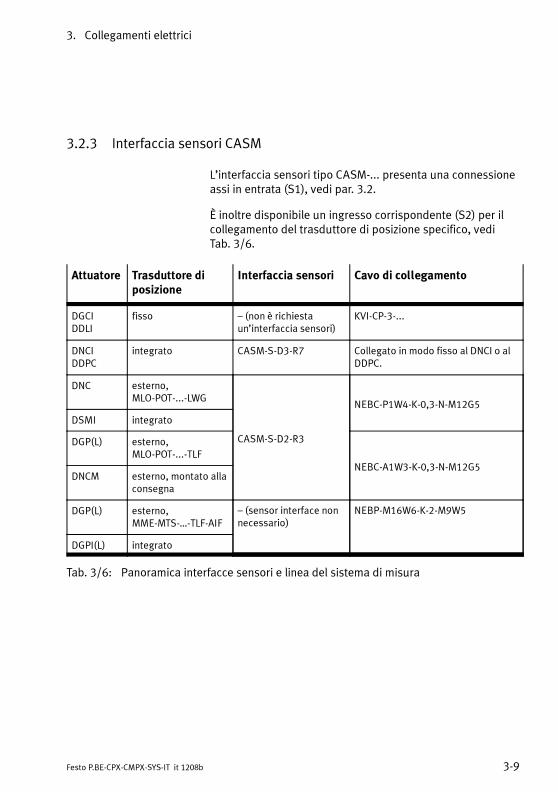
3. Collegamenti elettrici
3-9Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3.2.3 Interfaccia sensori CASM
L’interfaccia sensori tipo CASM-... presenta una connessioneassi in entrata (S1), vedi par. 3.2.
È inoltre disponibile un ingresso corrispondente (S2) per ilcollegamento del trasduttore di posizione specifico, vediTab. 3/6.
Attuatore Trasduttore diposizione
Interfaccia sensori Cavo di collegamento
DGCIDDLI
fisso – (non è richiestaun’interfaccia sensori)
KVI-CP-3-...
DNCIDDPC
integrato CASM-S-D3-R7 Collegato in modo fisso al DNCI o alDDPC.
DNC esterno,MLO-POT-...-LWG
CASM-S-D2-R3
NEBC-P1W4-K-0,3-N-M12G5
DSMI integrato
DGP(L) esterno,MLO-POT-...-TLF
NEBC-A1W3-K-0,3-N-M12G5DNCM esterno, montato alla
consegna
DGP(L) esterno,MME-MTS-…-TLF-AIF
– (sensor interface nonnecessario)
NEBP-M16W6-K-2-M9W5
DGPI(L) integrato
Tab. 3/6: Panoramica interfacce sensori e linea del sistema di misura
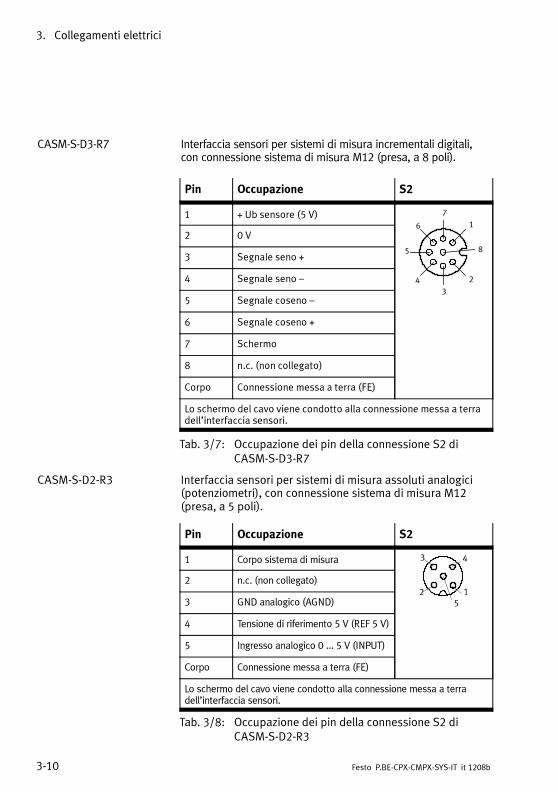
3. Collegamenti elettrici
3-10 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
CASM-S-D3-R7 Interfaccia sensori per sistemi di misura incrementali digitali,con connessione sistema di misura M12 (presa, a 8 poli).
Pin Occupazione S2
1 + Ub sensore (5 V)
4
3
7
16
5 8
2
2 0 V
3 Segnale seno +
4 Segnale seno –
5 Segnale coseno –
6 Segnale coseno +
7 Schermo
8 n.c. (non collegato)
Corpo Connessione messa a terra (FE)
Lo schermo del cavo viene condotto alla connessione messa a terradell’interfaccia sensori.
Tab. 3/7: Occupazione dei pin della connessione S2 diCASM-S-D3-R7
CASM-S-D2-R3 Interfaccia sensori per sistemi di misura assoluti analogici(potenziometri), con connessione sistema di misura M12(presa, a 5 poli).
Pin Occupazione S2
1 Corpo sistema di misura 3
2
4
1
5
2 n.c. (non collegato)
3 GND analogico (AGND)
4 Tensione di riferimento 5 V (REF 5 V)
5 Ingresso analogico 0 ... 5 V (INPUT)
Corpo Connessione messa a terra (FE)
Lo schermo del cavo viene condotto alla connessione messa a terradell’interfaccia sensori.
Tab. 3/8: Occupazione dei pin della connessione S2 diCASM-S-D2-R3
3. Collegamenti elettrici
3-11Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3.3 Garanzia del grado di protezione IP65/IP67
Con una linea assi completamente installata (connettore adinnesto inserito) il CMPX nel terminale CPX ha il grado di pro-tezione IP65/IP67.
NotaPer ottenere il grado di protezione IP65/IP67:
• Chiudere le connessioni non utilizzate con i cappucci diprotezione corrispondenti.
Se la connessione assi non viene utilizzata chiuderla con uncappuccio di protezione del tipo FLANSCHDOSE, S712. In talmodo è garantito il grado di protezione IP65/IP67.
Nel caso della VPWP la fornitura comprende un cappuccio diprotezione tipo ISK-M8 per l’uscita (DO, freno).
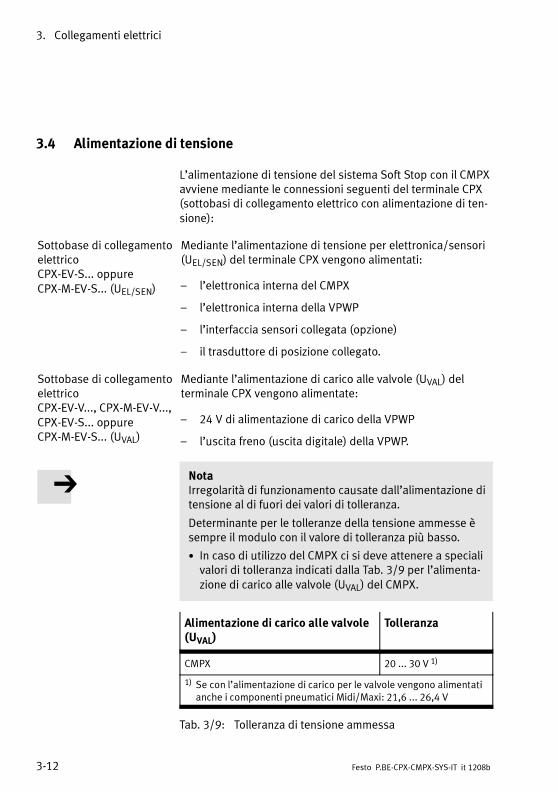
3. Collegamenti elettrici
3-12 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3.4 Alimentazione di tensione
L’alimentazione di tensione del sistema Soft Stop con il CMPXavviene mediante le connessioni seguenti del terminale CPX(sottobasi di collegamento elettrico con alimentazione di ten-sione):
Sottobase di collegamentoelettricoCPX-EV-S... oppureCPX-M-EV-S... (UEL/SEN)
Mediante l’alimentazione di tensione per elettronica/sensori(UEL/SEN) del terminale CPX vengono alimentati:
– l’elettronica interna del CMPX
– l’elettronica interna della VPWP
– l’interfaccia sensori collegata (opzione)
– il trasduttore di posizione collegato.
Sottobase di collegamentoelettricoCPX-EV-V..., CPX-M-EV-V...,CPX-EV-S... oppureCPX-M-EV-S... (UVAL)
Mediante l’alimentazione di carico alle valvole (UVAL) delterminale CPX vengono alimentate:
– 24 V di alimentazione di carico della VPWP
– l’uscita freno (uscita digitale) della VPWP.
NotaIrregolarità di funzionamento causate dall’alimentazione ditensione al di fuori dei valori di tolleranza.
Determinante per le tolleranze della tensione ammesse èsempre il modulo con il valore di tolleranza più basso.
• In caso di utilizzo del CMPX ci si deve attenere a specialivalori di tolleranza indicati dalla Tab. 3/9 per l’alimenta-zione di carico alle valvole (UVAL) del CMPX.
Alimentazione di carico alle valvole(UVAL)
Tolleranza
CMPX 20 ... 30 V 1)
1) Se con l’alimentazione di carico per le valvole vengono alimentatianche i componenti pneumatici Midi/Maxi: 21,6 ... 26,4 V
Tab. 3/9: Tolleranza di tensione ammessa
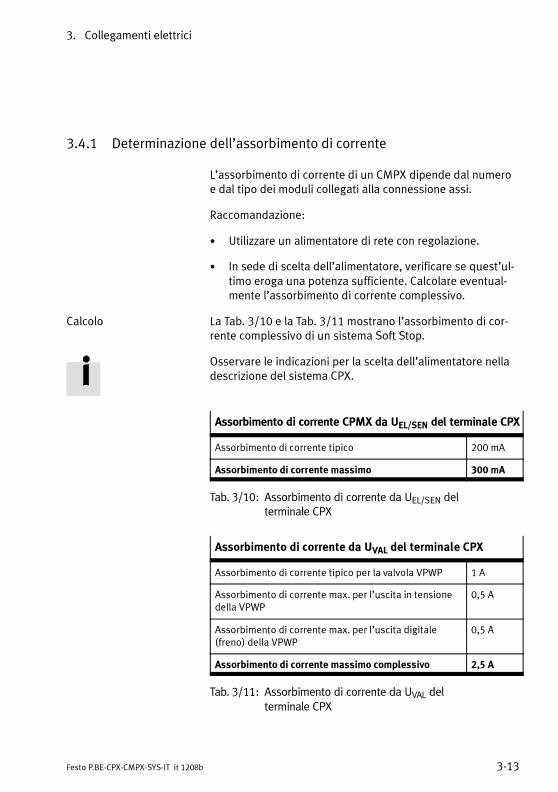
3. Collegamenti elettrici
3-13Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3.4.1 Determinazione dell’assorbimento di corrente
L’assorbimento di corrente di un CMPX dipende dal numeroe dal tipo dei moduli collegati alla connessione assi.
Raccomandazione:
• Utilizzare un alimentatore di rete con regolazione.
• In sede di scelta dell’alimentatore, verificare se quest’ul-timo eroga una potenza sufficiente. Calcolare eventual-mente l’assorbimento di corrente complessivo.
Calcolo La Tab. 3/10 e la Tab. 3/11 mostrano l’assorbimento di cor-rente complessivo di un sistema Soft Stop.
Osservare le indicazioni per la scelta dell’alimentatore nelladescrizione del sistema CPX.
Assorbimento di corrente CPMX da UEL/SEN del terminale CPX
Assorbimento di corrente tipico 200 mA
Assorbimento di corrente massimo 300 mA
Tab. 3/10: Assorbimento di corrente da UEL/SEN delterminale CPX
Assorbimento di corrente da UVAL del terminale CPX
Assorbimento di corrente tipico per la valvola VPWP 1 A
Assorbimento di corrente max. per l’uscita in tensionedella VPWP
0,5 A
Assorbimento di corrente max. per l’uscita digitale(freno) della VPWP
0,5 A
Assorbimento di corrente massimo complessivo 2,5 A
Tab. 3/11: Assorbimento di corrente da UVAL delterminale CPX
3. Collegamenti elettrici
3-14 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3.4.2 Principio di alimentazione elettrica – Formazione di zone di tensione
Il principio modulare secondo cui è concepita l’alimentazioneelettrica del terminale CPX consente la formazione di zone ditensione.
Osservare quanto segue:
– L’elettronica interna della VPWP e dei trasduttori di posi-zione digitali ed eventualmente quella dell’interfacciasensori vengono alimentate dall’alimentazione di tensioneper elettronica/sensori (UEL/SEN).L’alimentazione di carico della VPWP e dell’uscita dellaVPWP avviene grazie all’alimentazione di carico per levalvole (UVAL).
– Il CMPX collega internamente le barre conduttrici 0VEL/SEN e 0 VVAL del terminale CPX.
– In tale modo la separazione galvanica dell’alimenta-zione di tensione per elettronica/sensori (UEL/SEN) delterminale CPX e dell’alimentazione di carico alle val-vole (UVAL) che alimenta il CMPX viene annullata.
– Una separazione galvanica completa (su tutti i poli)dell’alimentazione valvole della VPWP non è quindipossibile neanche in combinazione con un’alimenta-zione CPX delle valvole del tipo CPX-EV-V.
NotaGuasti a componenti e irregolarità di funzionamento!
• Il CMPX deve essere alimentato con lo stesso potenziale(alimentatore comune) con cui avviene l’alimentazionedella tensione per elettronica/sensori (UEL/SEN) del ter-minale CPX (vedi anche Fig. 3/3).
Il CMPX collega sempre l’alimentazione 0 V dell’elettronicacon l’alimentazione 0 V delle valvole. Di questo si devetenere conto quando a sinistra del CMPX si trova una sot-tobase di collegamento elettrico CPX-GE-EV-V, poiché acausa di questo collegamento può essere annullata unaseparazione di potenziale prevista.

3. Collegamenti elettrici
3-15Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Informazioni generali sul principio di alimentazione elettrica delterminale CPX sono riportate nella descrizione del sistema CPX.
Alcune applicazioni speciali sono illustrate dalla Fig. 3/1, dallaFig. 3/2 e dalla Fig. 3/3.
Terminale CPX con CMPX + alimentazione sistema(Fig. 3/1)
Nell’esempio l’intero terminale CPX e il sistema Soft Stop delCMPX vengono alimentati dall’alimentazione del sistema.
24 VVAL0 VVAL
24 VOUT0 VOUT
0 VEL/SEN
1
1234
Rappresentazione schematica:
8DI 8DI4DO
CMPX
8 O 8 O
MPA
24 VEL/SEN
1 Sottobase di collegamento elettrico con alimentazione del sistema (alimentaCMPX e i componenti pneumatici MPA)
Fig. 3/1: Alimentazione di tensione comune (esempio)
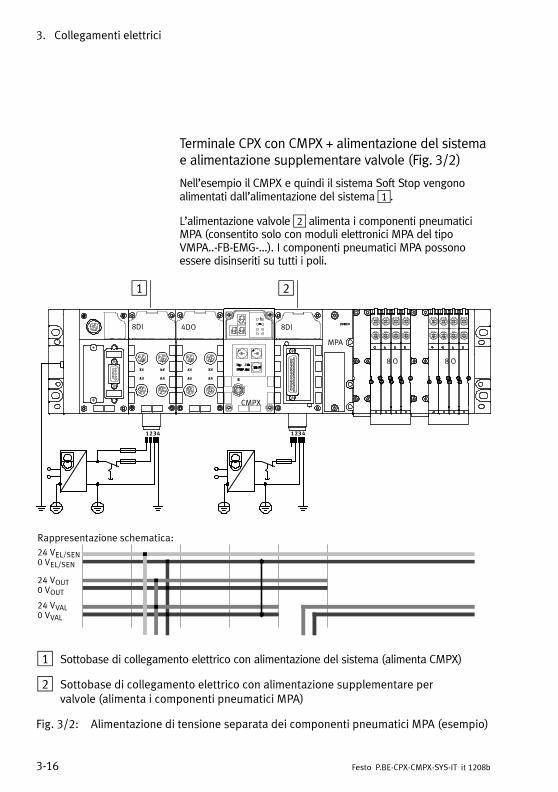
3. Collegamenti elettrici
3-16 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Terminale CPX con CMPX + alimentazione del sistemae alimentazione supplementare valvole (Fig. 3/2)
Nell’esempio il CMPX e quindi il sistema Soft Stop vengonoalimentati dall’alimentazione del sistema1.
L’alimentazione valvole2 alimenta i componenti pneumaticiMPA (consentito solo con moduli elettronici MPA del tipoVMPA..-FB-EMG-...). I componenti pneumatici MPA possonoessere disinseriti su tutti i poli.
8DI 8DI4DO
CMPX
8 O 8 O
1
MPA
2
1234 1234
Rappresentazione schematica:
24 VVAL0 VVAL
24 VOUT0 VOUT
24 VEL/SEN0 VEL/SEN
1 Sottobase di collegamento elettrico con alimentazione del sistema (alimenta CMPX)
2 Sottobase di collegamento elettrico con alimentazione supplementare pervalvole (alimenta i componenti pneumatici MPA)
Fig. 3/2: Alimentazione di tensione separata dei componenti pneumatici MPA (esempio)
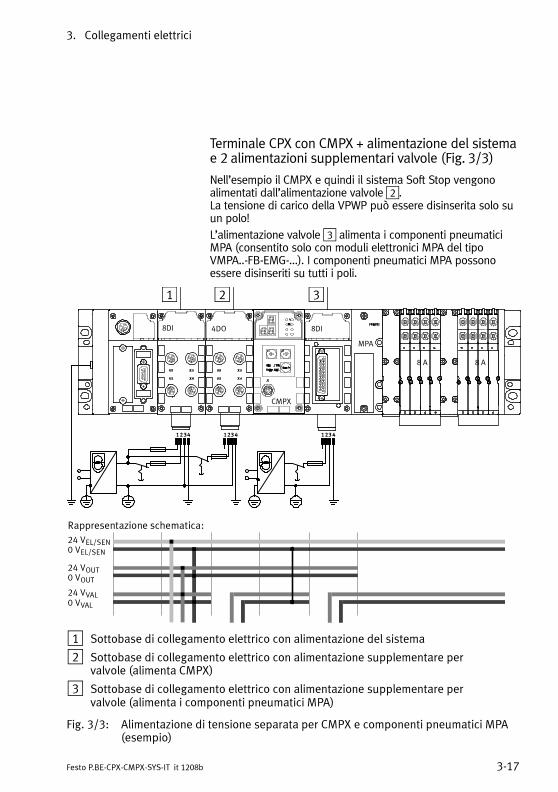
3. Collegamenti elettrici
3-17Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Terminale CPX con CMPX + alimentazione del sistemae 2 alimentazioni supplementari valvole (Fig. 3/3)
Nell’esempio il CMPX e quindi il sistema Soft Stop vengonoalimentati dall’alimentazione valvole2.La tensione di carico della VPWP può essere disinserita solo suun polo!L’alimentazione valvole3 alimenta i componenti pneumaticiMPA (consentito solo con moduli elettronici MPA del tipoVMPA..-FB-EMG-...). I componenti pneumatici MPA possonoessere disinseriti su tutti i poli.
8DI 8DI4DO
8 A 8 A
1
MPA
1234 1234
Rappresentazione schematica:
1234
2 3
CMPX
24 VVAL0 VVAL
24 VOUT0 VOUT
24 VEL/SEN0 VEL/SEN
1 Sottobase di collegamento elettrico con alimentazione del sistema
2 Sottobase di collegamento elettrico con alimentazione supplementare pervalvole (alimenta CMPX)
3 Sottobase di collegamento elettrico con alimentazione supplementare pervalvole (alimenta i componenti pneumatici MPA)
Fig. 3/3: Alimentazione di tensione separata per CMPX e componenti pneumatici MPA(esempio)
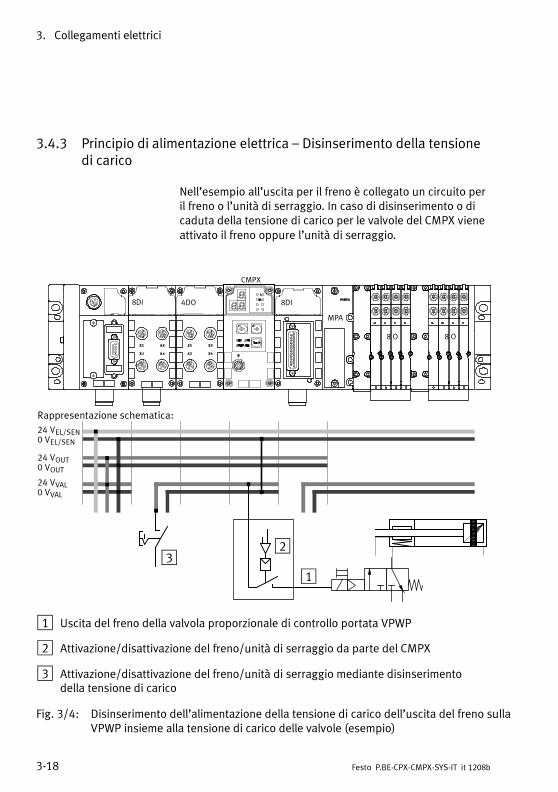
3. Collegamenti elettrici
3-18 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3.4.3 Principio di alimentazione elettrica – Disinserimento della tensionedi carico
Nell’esempio all’uscita per il freno è collegato un circuito peril freno o l’unità di serraggio. In caso di disinserimento o dicaduta della tensione di carico per le valvole del CMPX vieneattivato il freno oppure l’unità di serraggio.
8DI 8DI4DO
CMPX
8 O 8 O
1
MPA
2
Rappresentazione schematica:
3
24 VVAL0 VVAL
24 VOUT0 VOUT
24 VEL/SEN0 VEL/SEN
1 Uscita del freno della valvola proporzionale di controllo portata VPWP
2 Attivazione/disattivazione del freno/unità di serraggio da parte del CMPX
3 Attivazione/disattivazione del freno/unità di serraggio mediante disinserimentodella tensione di carico
Fig. 3/4: Disinserimento dell’alimentazione della tensione di carico dell’uscita del freno sullaVPWP insieme alla tensione di carico delle valvole (esempio)

Messa in funzione
4-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Capitolo 4
Messa in funzione

4. Messa in funzione
4-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
4.1 Panoramica/procedura per la messa in funzione 4-3. . . . . . . . . . . . . . . . . . . . .
4.1.1 Indicazioni per la messa in funzione 4-5. . . . . . . . . . . . . . . . . . . . . . . .
4.1.2 Panoramica sulle procedure specifiche per la messa in funzione 4-6.
4.2 Operazioni preliminari per la messa in funzione 4-7. . . . . . . . . . . . . . . . . . . . . .
4.2.1 Controllo della linea assi 4-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Inserimento dell’alimentazione di tensione, caratteristichedi inserimento 4-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Principi fondamentali della parametrizzazione e del comando 4-12. . . . . . . . . . .
4.3.1 Parametri A, C, S 4-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Parametri L, r 4-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Parametro o 4-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.4 Procedura di teach-in 4-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.5 Corsa di riferimento 4-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.6 Posizioni intermedie 4-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Messa in funzione con il pannello operativo 4-24. . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 Display e tastiera 4-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 Impostazione di parametri 4-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.3 Modifica dei parametri 4-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.4 Avvio della procedura di teach-in 4-32. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.5 Rilevamento delle posizione intermedie 4-35. . . . . . . . . . . . . . . . . . . . .
4.4.6 Panoramica sulla sequenza di messa in funzione 4-38. . . . . . . . . . . . . .
4.5 Funzioni di messa in servizio con l’handheld 4-40. . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Parametri (menu [Parameters] ) 4-41. . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Stato di segnale del CMPX (menu [Monitoring/Forcing] ) 4-44. . . . . . . .
4.5.3 Force mode 4-45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.4 Forcing di arresto e freno 4-47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.5 Comando (menu [Exec. Movement] ) 4-48. . . . . . . . . . . . . . . . . . . . . . . .
4.5.6 Traslazione manuale/programmazione mediante “teach-in”(Menu [Manual/Teach] ) 4-49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Indicazioni per l’esercizio 4-51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.1 Indicazioni generali per l’esercizio 4-51. . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.2 La prima istruzione di traslazione 4-53. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.3 Traslazione manuale 4-55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4. Messa in funzione
4-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.1 Panoramica/procedura per la messa in funzione
Questo capitolo descrive la parametrizzazione e la messa infunzione del sistema Soft Stop con il CMPX mediante:
– il pannello di comando (tasti e display sul CMPX), vedipar. 4.4,
– l’handheld CPX-MMI, vedi par. 4.5.
Per le indicazioni per la messa in funzione con il master CPX(nodo bus CPX o CPX-FEC) si rimanda al capitolo 5.
AvvertenzaElevate forze di accelerazione degli attuatori collegati! Movi-menti involontari possono provocare collisioni con rischio digravi lesioni.
Movimenti pericolosi provocati da un comando errato degliattuatori collegati, ad es. dovuti a:
– cablaggio errato o imbrattato,
– errore di azionamento dei componenti,
– errori nei generatori dei valori di misura e di segnali,
– componenti guasti o non conformi alle direttive CEM,
– errori nel comando principale.
• Prima di eseguire lavori di montaggio, installazione e ma-nutenzione, disinserire l’alimentazione dell’aria compressae della tensione contemporaneamente o nel seguente or-dine:1. alimentazione dell’aria compressa2. alimentazione di tensione dell’elettronica/dei sensori3. alimentazione della tensione di carico alle uscite/valvolePrima di eseguire qualsiasi lavoro nell’area operativa dellamacchina è necessario disinserire e bloccare l’alimenta-zione di aria compressa e della tensione.
• Adottare misure preventive volte a impedire l’accesso dipersone nel campo di influenza degli attuatori per la trasla-zione e di altri attuatori collegati.
4. Messa in funzione
4-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
• Il disinserimento dell’aria compressa o della tensione dicarico non è una misura di bloccaggio adeguata. In casodi guasto può infatti verificarsi uno spostamento acci-dentale dell’attuatore.
• Si consiglia di inserire l’aria compressa solo dopo averinstallato e parametrizzato a regola d’arte il sistema.
• I freni di arresto comandati dal regolatore dell’attuatorenon sono sufficienti a garantire una protezione perso-nale adeguata!Assicurare gli assi verticali contro un’eventuale caduta oabbassamento in seguito al disinserimento dell’ariacompressa e della tensione di carico mediante misuresupplementari tipo:– bloccaggio meccanico dell’asse verticale,– dispositivo di frenatura/arresto/bloccaggio esterno
oppure– sufficiente compensazione dei pesi dell’asse.
NotaUna parametrizzazione non corretta può danneggiare inmodo irreparabile le battute fisse e l’attuatore.
Impostare quindi i parametri con la massima attenzione.

4. Messa in funzione
4-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.1.1 Indicazioni per la messa in funzione
Struttura del sistema
NotaErrori nell’installazione del sistema e una impostazionenon corretta dei parametri possono determinare la trasla-zione dell’attuatore in una posizione del finecorsa senzadecelerazione, con conseguente distruzione della battutafissa o dell’attuatore. Per evitare collisioni di questo tipo,attenersi alle seguenti istruzioni.
– La posizione dei finecorsa (del cilindro o delle battute fisse)viene “appresa” dal CMPX grazie alla procedura di teach-in.La procedura di teach-in deve essere eseguita durante laprima messa in funzione e comunque dopo ogni sposta-mento delle battute fisse o sostituzione di componenti e tubiflessibili.
– Durante questa procedura, il CMPX può rilevare un collega-mento mediante tubazione dell’attuatore errato oppure para-metri impostati in modo non corretto. Perciò eseguire nuova-mente la procedura di teach-in, quando la tubazione è statastaccata e poi ricollegata oppure se i parametri A, C, S, L o rsono stati modificati.
– Accertarsi di mantenere il carico ammesso durante il funzio-namento.
Raccomandazione:applicare appositi cartelli di avvertimento sull’impianto.
Nodo bus CPX o CPX-FEC
Raccomandazione:in caso di messa in funzione con pannello di comando ohandheld:
• Per evitare un influsso dei segnali I/O ecc. eseguire la messain funzione del sistema Soft Stop senza bus (staccando even-tualmente il cavo bus) oppure commutare il CPX-FEC su“Stop”!
4. Messa in funzione
4-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.1.2 Panoramica sulle procedure specifiche per la messa in funzione
La messa in funzione con il pannello di comando o il CPX-MMIprevede i seguenti passi operativi:
1. Controllare la struttura del sistema Soft Stop con i compo-nenti utilizzati sulla linea assi (vedi par. 4.2.1).
2. Controllare l’alimentazione di tensione del terminale CPX,inserire l’alimentazione di tensione (vedi par. 4.2.2).
Avvertenza: Lasciare l’alimentazione dell’aria compressainizialmente disinserita.
3. Impostazione dei parametri del CMPX (vedi par. 4.3).
4. Inserire l’alimentazione dell’aria compressa.
5. Eseguire la procedura di teach-in.
6. Se necessario, rilevare le posizioni intermedie medianteteach-in.
Dopo la messa in funzione del sistema Soft Stop:
7. Configurare il nodo bus CPX oppure il CPX-FEC (vedipar. 5.1.1).
8. Controllare l’unità di comando del sistema Soft Stop conCMPX (vedi par. 5.6).
4. Messa in funzione
4-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.2 Operazioni preliminari per la messa in funzione
4.2.1 Controllo della linea assi
Operazioni preliminari:
• Controllare l’intera struttura del sistema, in particolarela tubazione dell’attuatore e i collegamenti elettrici (vedicapitoli 2 e 3).
Per una lista delle operazioni preliminari alla procedura diteach-in si rimanda al paragrafo 4.3.4.
4.2.2 Inserimento dell’alimentazione di tensione, caratteristichedi inserimento
AvvertenzaElevate forze di accelerazione degli attuatori collegati! Movi-menti involontari possono provocare collisioni con rischio digravi lesioni.
• Inserimento:Inserire sempre prima l’alimentazione di tensione, quindil’alimentazione di aria compressa.
• Disinserimento:Prima di eseguire lavori di montaggio, installazione e manu-tenzione, disinserire l’alimentazione dell’aria compressa edella tensione contemporaneamente o nel seguente ordine:1. alimentazione dell’aria compressa2. alimentazione di tensione dell’elettronica/dei sensori3. alimentazione della tensione di carico alle uscite/valvolePrima di eseguire qualsiasi lavoro nell’area operativa dellamacchina è necessario disinserire e bloccare l’alimentazionedi aria compressa e della tensione.

4. Messa in funzione
4-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Caratteristiche di inserimento nello stato di fornitura
Dopo aver inserito la tensione d’esercizio, il CMPX visualizzaper breve tempo il numero di versione del firmware e attendel’immissione dello stadio di accelerazione (vedi Fig. 4/1).
Inizio: caratteristichedi inserimento
Attesa dell’immissionedello stadio diaccelerazione
Immissione dei parametri ...
Numero di versione firmware
Valore parametro “0”(stato di fornitura)
Indicazione dellaversione firmware
aspettare circa 0,5 secondo
Fig. 4/1: Caratteristiche di inserimento nello stato di fornitura
Caratteristiche di inserimento dopo le fasi prelimi-nari di messa in funzione (a tavolino)
Dopo aver reinserito la tensione d’esercizio, il CMPX visua-lizza per breve tempo il numero di versione del firmware equindi, in sequenza, i valori dei parametri impostati. In se-guito il CMPX segnala lo stato di pronto per la procedura diteach-in (t ...). La “t” lampeggia (vedi Fig. 4/2).
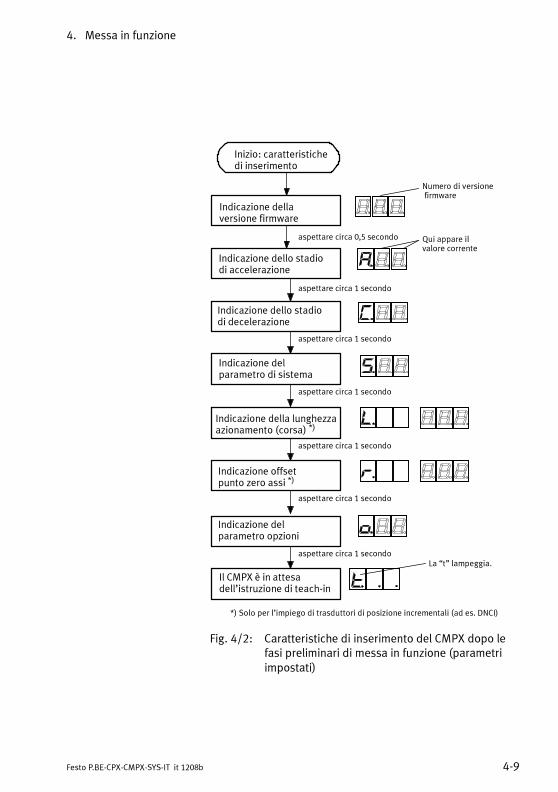
4. Messa in funzione
4-9Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Inizio: caratteristichedi inserimento
Indicazione delparametro di sistema
Indicazione dello stadiodi accelerazione
Indicazione dello stadiodi decelerazione
aspettare circa 1 secondo
aspettare circa 1 secondo
aspettare circa 1 secondo
Il CMPX è in attesadell’istruzione di teach-in
La “t” lampeggia.
Numero di versionefirmware
Qui appare ilvalore corrente
Indicazione dellaversione firmware
aspettare circa 0,5 secondo
Indicazione della lunghezzaazionamento (corsa) *)
aspettare circa 1 secondo
Indicazione offsetpunto zero assi *)
aspettare circa 1 secondo
Indicazione delparametro opzioni
aspettare circa 1 secondo
*) Solo per l’impiego di trasduttori di posizione incrementali (ad es. DNCI)
Fig. 4/2: Caratteristiche di inserimento del CMPX dopo lefasi preliminari di messa in funzione (parametriimpostati)
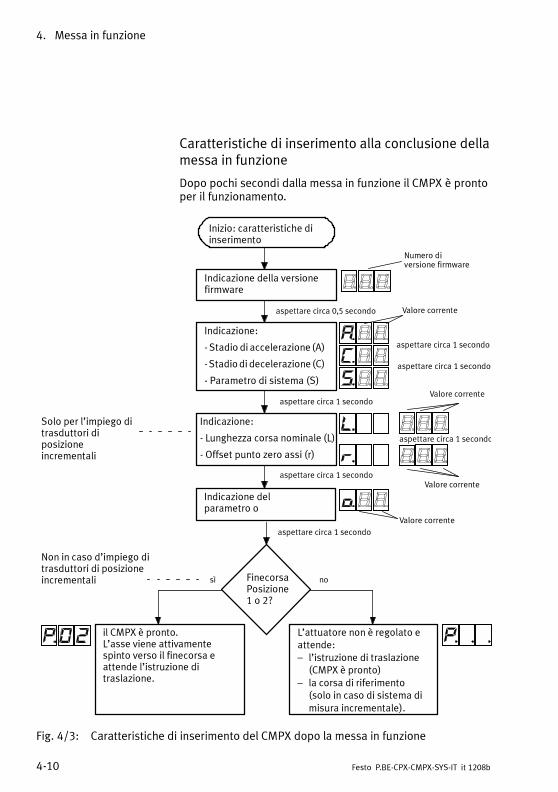
4. Messa in funzione
4-10 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Caratteristiche di inserimento alla conclusione dellamessa in funzione
Dopo pochi secondi dalla messa in funzione il CMPX è prontoper il funzionamento.
Inizio: caratteristiche diinserimento
FinecorsaPosizione1 o 2?
il CMPX è pronto.L’asse viene attivamentespinto verso il finecorsa eattende l’istruzione ditraslazione.
L’attuatore non è regolato eattende:– l’istruzione di traslazione
(CMPX è pronto)– la corsa di riferimento
(solo in caso di sistema dimisura incrementale).
sì no
aspettare circa 1 secondo
Numero diversione firmware
Indicazione della versionefirmware
aspettare circa 0,5 secondo
Indicazione:
- Stadio di accelerazione(A)
-Stadiodi decelerazione(C)
- Parametro di sistema (S)
Valore corrente
Indicazione:
- Lunghezza corsa nominale (L)
- Offset punto zero assi (r)
aspettare circa 1 secondo
aspettare circa 1 secondo
aspettare circa 1 secondo
Indicazione delparametro o
Valore corrente
aspettare circa 1 secondo
aspettare circa 1 secondo
Solo per l’impiego ditrasduttori diposizioneincrementali
Non in caso d’impiego ditrasduttori di posizioneincrementali
Valore corrente
Valore corrente
Fig. 4/3: Caratteristiche di inserimento del CMPX dopo la messa in funzione
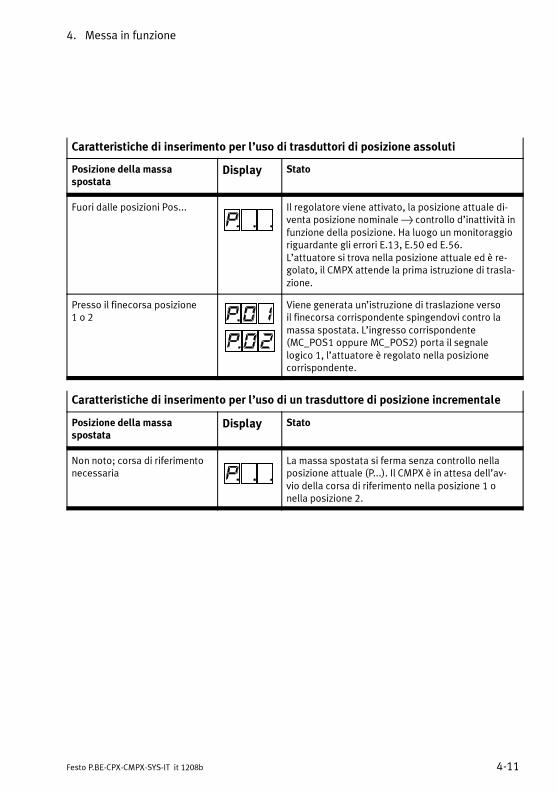
4. Messa in funzione
4-11Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Caratteristiche di inserimento per l’uso di trasduttori di posizione assoluti
Posizione della massaspostata
Display Stato
Fuori dalle posizioni Pos... Il regolatore viene attivato, la posizione attuale di-venta posizione nominale} controllo d’inattività infunzione della posizione. Ha luogo unmonitoraggioriguardante gli errori E.13, E.50 ed E.56.L’attuatore si trova nella posizione attuale ed è re-golato, il CMPX attende la prima istruzione di trasla-zione.
Presso il finecorsa posizione1 o 2
Viene generata un’istruzione di traslazione versoil finecorsa corrispondente spingendovi contro lamassa spostata. L’ingresso corrispondente(MC_POS1 oppure MC_POS2) porta il segnalelogico 1, l’attuatore è regolato nella posizionecorrispondente.
Caratteristiche di inserimento per l’uso di un trasduttore di posizione incrementale
Posizione della massaspostata
Display Stato
Non noto; corsa di riferimentonecessaria
La massa spostata si ferma senza controllo nellaposizione attuale (P...). Il CMPX è in attesa dell’av-vio della corsa di riferimento nella posizione 1 onella posizione 2.
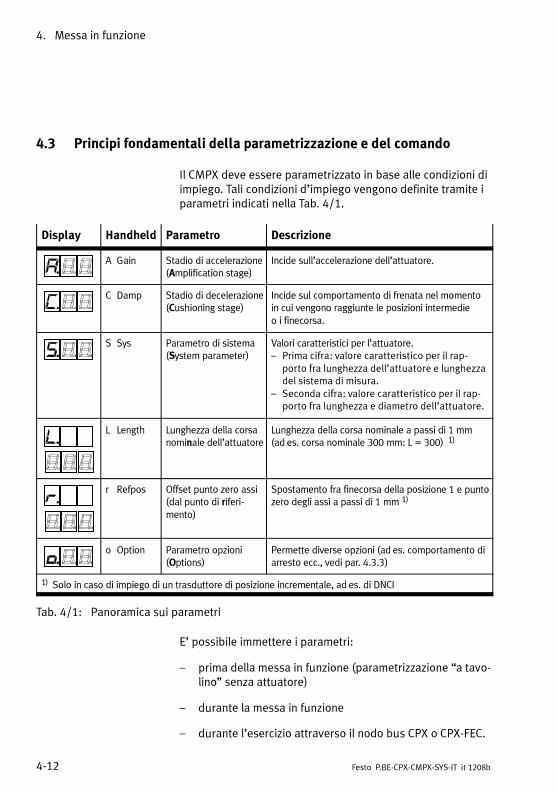
4. Messa in funzione
4-12 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.3 Principi fondamentali della parametrizzazione e del comando
Il CMPX deve essere parametrizzato in base alle condizioni diimpiego. Tali condizioni d’impiego vengono definite tramite iparametri indicati nella Tab. 4/1.
Display Handheld Parametro Descrizione
A Gain Stadio di accelerazione(Amplification stage)
Incide sull’accelerazione dell’attuatore.
C Damp Stadio di decelerazione(Cushioning stage)
Incide sul comportamento di frenata nel momentoin cui vengono raggiunte le posizioni intermedieo i finecorsa.
S Sys Parametro di sistema(System parameter)
Valori caratteristici per l’attuatore.– Prima cifra: valore caratteristico per il rap-
porto fra lunghezza dell’attuatore e lunghezzadel sistema di misura.
– Seconda cifra: valore caratteristico per il rap-porto fra lunghezza e diametro dell’attuatore.
L Length Lunghezza della corsanominale dell’attuatore
Lunghezza della corsa nominale a passi di 1 mm(ades. corsa nominale 300 mm: L = 300) 1)
r Refpos Offset punto zero assi(dal punto di riferi-mento)
Spostamento fra finecorsa della posizione 1 e puntozero degli assi a passi di 1 mm 1)
o Option Parametro opzioni(Options)
Permette diverse opzioni (ad es. comportamento diarresto ecc., vedi par. 4.3.3)
1) Solo in caso di impiego di un trasduttore di posizione incrementale, ad es. di DNCI
Tab. 4/1: Panoramica sui parametri
E’ possibile immettere i parametri:
– prima della messa in funzione (parametrizzazione “a tavo-lino” senza attuatore)
– durante la messa in funzione
– durante l’esercizio attraverso il nodo bus CPX o CPX-FEC.
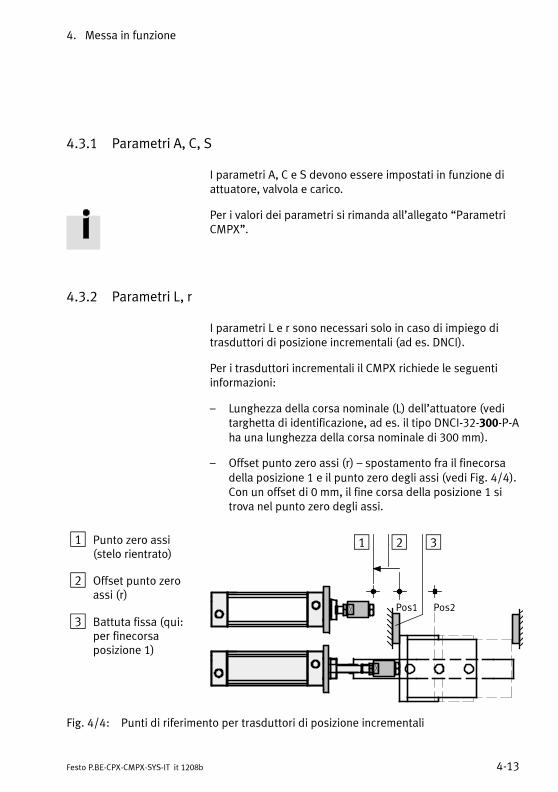
4. Messa in funzione
4-13Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.3.1 Parametri A, C, S
I parametri A, C e S devono essere impostati in funzione diattuatore, valvola e carico.
Per i valori dei parametri si rimanda all’allegato “ParametriCMPX”.
4.3.2 Parametri L, r
I parametri L e r sono necessari solo in caso di impiego ditrasduttori di posizione incrementali (ad es. DNCI).
Per i trasduttori incrementali il CMPX richiede le seguentiinformazioni:
– Lunghezza della corsa nominale (L) dell’attuatore (veditarghetta di identificazione, ad es. il tipo DNCI-32-300-P-Aha una lunghezza della corsa nominale di 300 mm).
– Offset punto zero assi (r) – spostamento fra il finecorsadella posizione 1 e il punto zero degli assi (vedi Fig. 4/4).Con un offset di 0 mm, il fine corsa della posizione 1 sitrova nel punto zero degli assi.
1 Punto zero assi(stelo rientrato)
2 Offset punto zeroassi (r)
3 Battuta fissa (qui:per finecorsaposizione 1)
1 2 3
Pos1 Pos2
Fig. 4/4: Punti di riferimento per trasduttori di posizione incrementali
4. Messa in funzione
4-14 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.3.3 Parametro o
Il parametro o permette di modificare la reazione dei segnalidel CMPX e di disattivare determinate funzioni standard.
La regolazione di fabbrica (parametro o = 0) significa:
– opzione non selezionata. Reazione standard attiva.
Reazione standard con regolazione di fabbrica (parametro o = 0):
– Controllo dei tempi di posizionamento (10 s) attivo
– Assestamento continuo attivo
– Reazione flessibile della posizione di fine corsa attiva
– Stop senza corsa di ritorno (rampa).
Il valore decimale viene interpretato internamente in modobinario. Ad ogni bit viene assegnata una determinata opzione(vedi Tab. 4/2). Possono essere impostate solo combinazionidi opzioni ammissibili.Così per il parametro o si ottiene un campo di valori possibilidi 00 – 46.
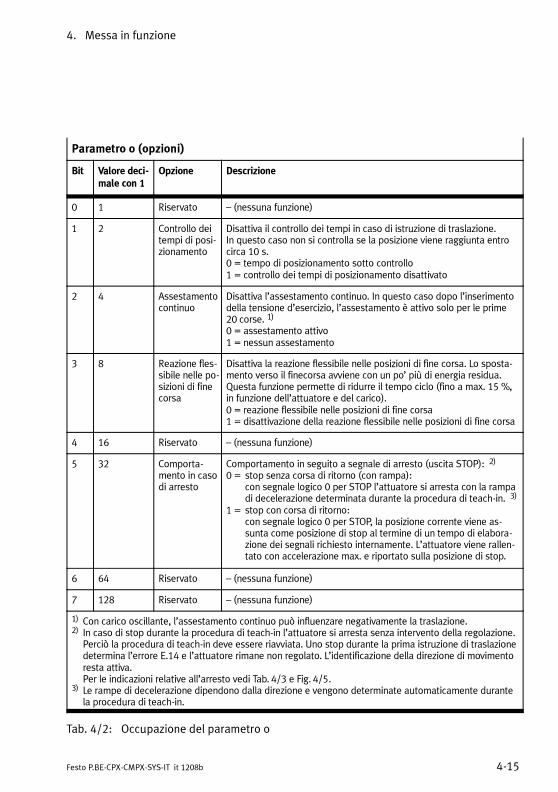
4. Messa in funzione
4-15Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Parametro o (opzioni)
Bit Valore deci-male con 1
Opzione Descrizione
0 1 Riservato – (nessuna funzione)
1 2 Controllo deitempi di posi-zionamento
Disattiva il controllo dei tempi in caso di istruzione di traslazione.In questo caso non si controlla se la posizione viene raggiunta entrocirca 10 s.0 = tempo di posizionamento sotto controllo1 = controllo dei tempi di posizionamento disattivato
2 4 Assestamentocontinuo
Disattiva l’assestamento continuo. In questo caso dopo l’inserimentodella tensione d’esercizio, l’assestamento è attivo solo per le prime20 corse. 1)
0 = assestamento attivo1 = nessun assestamento
3 8 Reazione fles-sibile nelle po-sizioni di finecorsa
Disattiva la reazione flessibile nelle posizioni di fine corsa. Lo sposta-mento verso il finecorsa avviene con un po’ più di energia residua.Questa funzione permette di ridurre il tempo ciclo (fino a max. 15 %,in funzione dell’attuatore e del carico).0 = reazione flessibile nelle posizioni di fine corsa1 = disattivazione della reazione flessibile nelle posizioni di fine corsa
4 16 Riservato – (nessuna funzione)
5 32 Comporta-mento in casodi arresto
Comportamento in seguito a segnale di arresto (uscita STOP): 2)
0 = stop senza corsa di ritorno (con rampa):con segnale logico 0 per STOP l’attuatore si arresta con la rampadi decelerazione determinata durante la procedura di teach-in. 3)
1 = stop con corsa di ritorno:con segnale logico 0 per STOP, la posizione corrente viene as-sunta come posizione di stop al termine di un tempo di elabora-zione dei segnali richiesto internamente. L’attuatore viene rallen-tato con accelerazione max. e riportato sulla posizione di stop.
6 64 Riservato – (nessuna funzione)
7 128 Riservato – (nessuna funzione)
1) Con carico oscillante, l’assestamento continuo può influenzare negativamente la traslazione.2) In caso di stop durante la procedura di teach-in l’attuatore si arresta senza intervento della regolazione.
Perciò la procedura di teach-in deve essere riavviata. Uno stop durante la prima istruzione di traslazionedetermina l’errore E.14 e l’attuatore rimane non regolato. L’identificazione della direzione di movimentoresta attiva.Per le indicazioni relative all’arresto vedi Tab. 4/3 e Fig. 4/5.
3) Le rampe di decelerazione dipendono dalla direzione e vengono determinate automaticamente durantela procedura di teach-in.
Tab. 4/2: Occupazione del parametro o
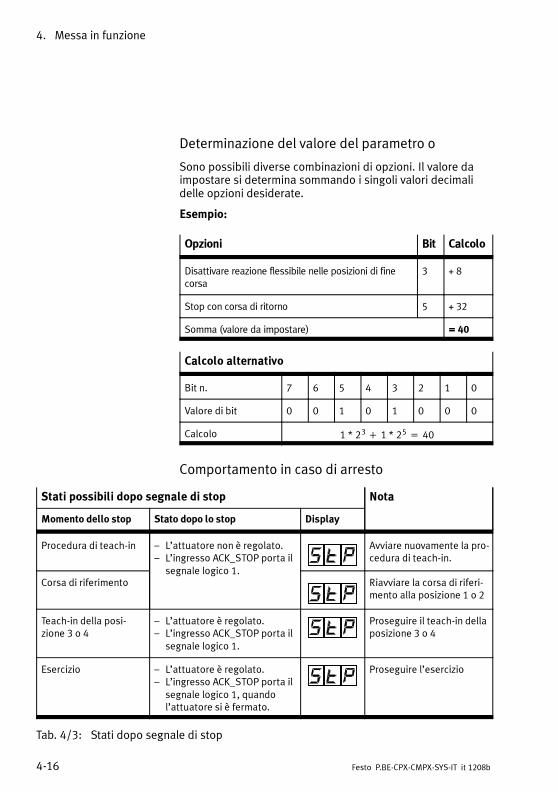
4. Messa in funzione
4-16 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Determinazione del valore del parametro o
Sono possibili diverse combinazioni di opzioni. Il valore daimpostare si determina sommando i singoli valori decimalidelle opzioni desiderate.
Esempio:
Opzioni Bit Calcolo
Disattivare reazione flessibile nelle posizioni di finecorsa
3 + 8
Stop con corsa di ritorno 5 + 32
Somma (valore da impostare) = 40
Calcolo alternativo
Bit n. 7 6 5 4 3 2 1 0
Valore di bit 0 0 1 0 1 0 0 0
Calcolo 1 * 23+ 1 * 25 = 40
Comportamento in caso di arresto
Stati possibili dopo segnale di stop Nota
Momento dello stop Stato dopo lo stop Display
Procedura di teach-in – L’attuatore non è regolato.– L’ingresso ACK_STOP porta il
segnale logico 1.
Avviare nuovamente la pro-cedura di teach-in.
Corsa di riferimento Riavviare la corsa di riferi-mento alla posizione 1 o 2
Teach-in della posi-zione 3 o 4
– L’attuatore è regolato.– L’ingresso ACK_STOP porta il
segnale logico 1.
Proseguire il teach-in dellaposizione 3 o 4
Esercizio – L’attuatore è regolato.– L’ingresso ACK_STOP porta il
segnale logico 1, quandol’attuatore si è fermato.
Proseguire l’esercizio
Tab. 4/3: Stati dopo segnale di stop

4. Messa in funzione
4-17Festo P.BE-CPX-CMPX-SYS-IT it 1208b
1 Settando STOP vieneimpartita l’istruzionedi arresto dell’attua-tore in funzione delparametro o impo-stato
2 ACK_STOP viene set-tato non appena l’at-tuatore si è fermato
3 Con il reset di STOP laposizione reale cor-rente viene acquisitacome posizione nomi-nale
Asse in movimento
Uscita STOP(segnale di stop)
Ingresso ACK_STOP(segnale diconferma di stop)
Display
sì
no
1
0
1
0
1
0
1
2
3
Fig. 4/5: Diagramma di flusso per stop
NotaLa posizione nominale corrente viene conservata finché èsettato il segnale di stop.
Se in questo lasso di tempo l’attuatore viene spostatoquando l’aria compressa è disinserita e poi quest’ultimaviene riattivata, l’attuatore ritorna nella posizione nomi-nale.
La posizione corrente viene acquisita come posizione no-minale risettando il segnale di stop.
4. Messa in funzione
4-18 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.3.4 Procedura di teach-in
La procedura di teach-in si svolge in due fasi.
Identificazione statica Durante la procedura di teach-in vengono raggiunti lenta-mente in modo ciclico i finecorsa delle posizioni 1 e 2. In que-sto modo il CMPX rileva la posizione dei finecorsa meccanicie alcuni dati caratteristici del sistema, come attrito e isteresi.Il CMPX memorizza questi valori nell’EEPROM integrata.
Identificazione dinamica Per verificare la plausibilità dei parametri impostati, trasfe-rire la massa spostata prima al centro della corsa di trasla-zione utilizzata e, in seguito, a poca distanza dal finecorsadella posizione 1.
NotaQuando si utilizza un trasduttore di posizione incrementale(ad es. DNCI):
Durante la procedura di teach-in vengono raggiunti sem-pre i finecorsa delle posizioni 1 e 2. Così viene stabilito ilriferimento fra valore di misura e posizione corrente. Unacorsa di riferimento non è necessaria.
La procedura di teach-in è conclusa quando la massa spo-stata viene premuta contro il finecorsa della posizione 1 el’ingresso MC_POS1 porta il segnale logico 1.
Per eseguire la messa in funzione, l’attuatore pneumaticodeve essere pronto per il funzionamento. Eseguire la proce-dura di teach-in con il carico massimo. Durante tale opera-zione, sugli ingressi POS1 - POS4 deve essere applicato unsegnale logico 0.
4. Messa in funzione
4-19Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Preliminari alla procedura di teach-in
Per preparare la procedura di teach-in, procedere nel modoseguente:
La corsa di traslazione ammessa e i parametri per l’attuatoreutilizzato sono indicati nell’allegato “Parametri CMPX”. Una voltainserita la tensione d’esercizio, i parametri impostati attuali ven-gono visualizzati per breve tempo (vedi anche par. 4.2.2,Fig. 4/2).
1. Controllare l’intera struttura del sistema, in particolare latubazione dell’attuatore e i collegamenti elettrici (vedi capi-toli 2 e 3).
2. Nel caso di impiego di battute fisse:Regolare le battute fisse esattamente sulle posizioni di finecorsa richieste.
3. Inserire l’alimentazione di tensione. A tale scopo osservare leindicazioni riportate nei par. 4.2.1 e 4.2.2.
4. In caso di messa in funzione preliminare controllare se i pa-rametri sono stati impostati correttamente.Se necessario, correggerli.
5. Inserire l’alimentazione dell’aria compressa.
Ora si può avviare la procedura di teach-in in base alla descri-zione (con pannello di comando, CPX-MMI, dati I/O).
Presupposti per laprocedura di teach-in
Sulle uscite da POS1 a POS4 deve essere posto un segnalelogico 0. I parametri devono essere impostati correttamente.Il carico massimo ed eventualmente le battute fisse devonoessere montati correttamente.
Per avviare la procedura di teach-in esistono le seguenti moda-lità:
– Se non è ancora stata eseguita alcuna procedura di teach-in:Tenere premuto il tasto Enter (Teach) per più di 2 secondi.
– Avvio con il CPX-MMI.
– Mediante i dati I/O del modulo con l’uscita START_TEACH.
4. Messa in funzione
4-20 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Assestamento dopo la procedura di teach-in
Assestamento Durante il funzionamento, il lavoro dell’attuatore viene co-stantemente monitorato. I dati caratteristici interni vengonoadeguati allo stato effettivo dell’attuatore (assestamento),per compensare ad es. l’usura del sistema nel corso deltempo.
Dopo ca. 20-30 corse si osserva un miglioramento spontaneodel lavoro dell’attuatore (assestamento). Dopo il rilevamentodelle posizioni intermedie e finali, eseguire sempre 20-30 ciclidi traslazione.
Esecuzione di una nuova procedura di teach-in
Con il CMPX pronto è possibile ripetere la procedura di teach-inin qualsiasi momento.
Valgono gli stessi presupposti validi per la prima procedura diteach-in.
Ripetendo tale procedura, si cancellano i valori di assesta-mento. Le posizioni intermedie rilevate in fase di teach-in ri-mangono invariate.
Se, dopo aver ripetuto la procedura di teach-in per i fine-corsa, le posizioni intermedie (posizione 3 e 4) precedente-mente rilevate dovessero risultare all’esterno dell’area ditraslazione, le istruzioni di traslazione verso tali posizionivengono annullate con un errore (vedi par. 6.2.3). Una voltaspostati e rilevati nuovamente i finecorsa, le istruzioni di tra-slazione verso le posizioni intermedie vengono eseguite nonappena queste ultime rientrano nell’area di traslazione am-messa.
4. Messa in funzione
4-21Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.3.5 Corsa di riferimento
Nei trasduttori di posizione incrementali il valore di misurafa riferimento a un punto di riferimento e viene determinatacontando passi di misura uguali (incrementi). La relazione fravalore di misura e posizione corrente viene stabilita mediantela corsa di riferimento.
Definizione del riferimentonel corso della proceduradi teach-in
Durante la procedura di teach-in vengono raggiunti i fine-corsa delle posizioni 1 e 2. Così viene stabilito il riferimentofra valore di misura e posizione corrente. Una corsa di riferi-mento supplementare non è necessaria.
Corsa di riferimento dopoPOWER ON
Il riferimento fra valore di misura e posizione corrente vaperso quando viene reinserita la tensione d’esercizio delCMPX. Bisogna eseguire una corsa di riferimento ai fine-corsa della posizione 1 o 2 (vedi anche par. 4.6.1).
4. Messa in funzione
4-22 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.3.6 Posizioni intermedie
Il CMPX consente la traslazione rapida verso max. due posi-zioni intermedie selezionabili (posizione 3 e 4). Le posizioniintermedie richieste vengono “rilevate” muovendo manual-mente la massa spostata e quindi memorizzando il valorerilevato. Questa procedura garantisce il successivo raggiungi-mento delle posizioni intermedie “rilevate” durante il funzio-namento dell’attuatore.
Le posizioni intermedie rilevate trovano applicazione anchecome punti di riferimento per i sensori, poiché l’ingresso cor-rispondente MC_POS3 o MC_POS4 porta il segnale logico 1per 50 ms al superamento delle posizioni intermedie (vedipar. 5.7).
Presupposto L’attuatore deve essere pronto per il funzionamento. Sulleuscite da POS1 a POS4 deve essere posto un segnale logico 0.
Varianti Procedura
Traslazione senzapressione di alimenta-zione 1)
Durante la procedura di teach-in, la massaspostata può essere portata manualmentee con estrema precisione nella posizionerichiesta.
Traslazione con pres-sione di alimentazione
La massa può essere spostata manual-mente. A volte il posizionamento precisodell’attuatore è difficile e richiede moltotempo.
1) Il controllo della pressione della valvola proporzionale di controlloportata VPWP fa sì che non sia possibile disattivare la pressionedi alimentazione senza che venga emessa una segnalazione dierrore. Per spostare la massa è necessario rimuovere i tubi flessi-bili dall’attuatore e bloccare gli attacchi della VPWP.

4. Messa in funzione
4-23Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Per eseguire la procedura di teach-in o definire le posizioniintermedie esistono le seguenti modalità:
– Traslazione dell’attuatore con i tasti� o� e confermadella posizione richiesta con il tasto Enter.
– Traslazione e acquisizione con il CPX-MMI.
– Immissione diretta dei valori di posizione con il CPX-MMI.
– Traslazione dell’attuatore mediante i dati I/O del modulocon le uscite JOG_NEG oppure JOG_POS e acquisizionemediante le uscite RETAIN_POS3 oppure RETAIN_POS4.
– Parametrizzazione diretta dei valori di posizione mediantei dati I/O del modulo.
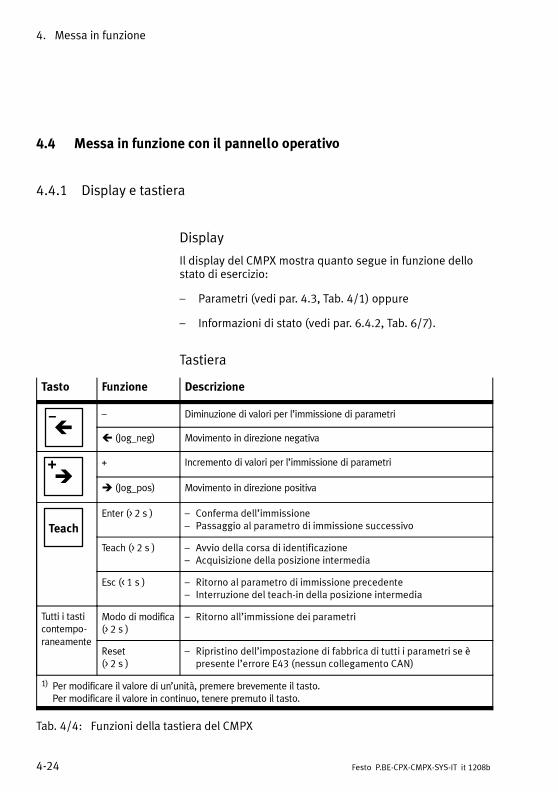
4. Messa in funzione
4-24 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.4 Messa in funzione con il pannello operativo
4.4.1 Display e tastiera
Display
Il display del CMPX mostra quanto segue in funzione dellostato di esercizio:
– Parametri (vedi par. 4.3, Tab. 4/1) oppure
– Informazioni di stato (vedi par. 6.4.2, Tab. 6/7).
Tastiera
Tasto Funzione Descrizione
�– – Diminuzione di valori per l’immissione di parametri
� (Jog_neg) Movimento in direzione negativa
�+ + Incremento di valori per l’immissione di parametri
� (Jog_pos) Movimento in direzione positiva
Teach
Enter (> 2 s ) – Conferma dell’immissione– Passaggio al parametro di immissione successivo
Teach (> 2 s ) – Avvio della corsa di identificazione– Acquisizione della posizione intermedia
Esc (< 1 s ) – Ritorno al parametro di immissione precedente– Interruzione del teach-in della posizione intermedia
Tutti i tasticontempo-raneamente
Modo di modifica(> 2 s )
– Ritorno all’immissione dei parametri
Reset(> 2 s )
– Ripristino dell’impostazione di fabbrica di tutti i parametri se èpresente l’errore E43 (nessun collegamento CAN)
1) Per modificare il valore di un’unità, premere brevemente il tasto.Per modificare il valore in continuo, tenere premuto il tasto.
Tab. 4/4: Funzioni della tastiera del CMPX
4. Messa in funzione
4-25Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.4.2 Impostazione di parametri
Alla consegna tutti i parametri sono azzerati (stato di forni-tura). Una volta inserita l’alimentazione di tensione, il CMPXresta in attesa dell’immissione dei parametri. Per preparare lamessa in funzione, è possibile impostare i parametri “a tavo-lino” senza montare l’attuatore. Questa operazione semplificala messa in funzione di grandi serie in produzione.
Impostare i parametri nel seguente modo:
NotaUna parametrizzazione non corretta può danneggiare inmodo irreparabile le battute fisse e l’attuatore.
Impostare quindi i parametri con la massima attenzione.
Lo stadio di accelerazione/decelerazione corretto e ilparametro di sistema per l’attuatore sono riportati nell’alle-gato “Parametri CMPX”.I valori qui indicati sono esemplificativi. Perciò introdurrei valori validi per la struttura specifica dell’attuatore.
1. Inserire la tensione d’esercizio del CMPX.Il CMPX visualizza per breve tempo il numero di versionedel firmware interno.Quindi resta in attesa dell’immissione dello stadio di acce-lerazione. Sul display appare la lettera A (Amplificationstage). I numeri indicano lo stadio (in questo caso 0).
(A.00)
2. Regolare lo stadio di accelerazione con +/-, ad es. 02.
(A.02)
4. Messa in funzione
4-26 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3. Tenere premuto il tasto Enter per più di 2 secondi (> 2 s).Il valore viene acquisito dal CMPX che passa allo stadio didecelerazione (in questo caso 0). Sul display appare lalettera C (Cushioning stage).
(C.00)
4. Regolare lo stadio di decelerazione con +/-, ad es. 04.
(C.04)
5. Tenere premuto il tasto Enter > per 2 s.Il valore viene acquisito e appare il parametro di sistema(in questo caso 0).
(S.00)
6. Impostare il parametro di sistema con +/-, ad es. 01.
(S.01)
7. Tenere premuto il tasto Enter > per 2 s. Il valore vieneacquisito.
Se non si utilizza alcun trasduttore di posizione incremen-tale appare il parametro opzioni (o.00). Passare al punto14.
Se si impiega un trasduttore di posizione incrementale(ad es. DNCI) viene richiesta la lunghezza dell’attuatore(corsa nominale, L).
(L.00)
4. Messa in funzione
4-27Festo P.BE-CPX-CMPX-SYS-IT it 1208b
8. Premere un tasto qualsiasi per visualizzare la lunghezzadell’attuatore in mm (valore a tre cifre).
(000)
9. Regolare la lunghezza in mm con +/- (vedi targhetta diidentificazione), ad es. 300 per 300 mm.
(300)
10. Tenere premuto il tasto Enter > per 2 s. Il valore vieneacquisito e appare la lettera caratteristica per l’offset delpunto zero assi (r).
(r.)
11. Premere un tasto qualsiasi per visualizzare l’offset delpunto zero assi (r) in mm (valore a tre cifre).
(000)
12. Regolare l’offset del punto zero assi (vedi anchepar. 4.3.2) in mm con +/-, ad es. 20 per 20 mm.
(020)
13. Tenere premuto il tasto Enter > per 2 s. Il valore vieneacquisito e appare il parametro opzioni.
(o.00)
4. Messa in funzione
4-28 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
14. Regolare il parametro opzioni (vedi anche par. 4.3.3) con+/-, ad es. 40
(o.40)
15. Tenere premuto il tasto Enter > per 2 s. Il valore viene ac-quisito e appare lo stato di pronto per la procedura diteach-in mediante una “t” lampeggiante. Così i parametrisono stati memorizzati e la parametrizzazione preliminare(a tavolino) è conclusa.
La “t” lampeggia.
Se sono soddisfatte tutte le premesse necessarie per ese-guire il teach-in (vedi par. 4.3.4), è possibile avviare questaprocedura (vedi par. 4.4.4).
16. Se si desidera terminare le fasi preliminari della messa infunzione, disinserire la tensione d’esercizio.

4. Messa in funzione
4-29Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.4.3 Modifica dei parametri
Il parametro opzioni o può essere modificato senza doverriavviare la procedura di teach-in. Dopo la modifica dei para-metri A, C, S, L oppure r eseguire una nuova procedura diteach-in.
Se necessario, è possibile modificare i parametri impostati,ad es. per correggere errori di immissione od ottimizzare illavoro dell’attuatore. A tale scopo esistono le seguenti possi-bilità:
Possibilità Descrizione
Attivazione del mododi modifica
Questo modo mantiene, consente di modifi-care o acquisire i valori dei parametri impo-stati. Vengono mantenute le posizioni inter-medie rilevate in fase di teach-in.
Ripristino dello statodi fornitura
Vengono azzerati tutti i valori dei parametri.Si cancellano le posizioni intermedie rilevatein fase di teach-in.
Attivazione del modo di modifica
Presupposto Il sistema di misura deve essere collegato. All’uscitaDISABLE_KEYS deve essere applicato il segnale logico0 e sul CPX-MMI non deve essere attivo il Force_Mode.L’attuatore deve essere fermo.
NotaAttivando il modo di modifica, la spola della valvola siporta sulla posizione centrale. Durante la traslazione, lamassa può raggiungere uno dei finecorsa senza decelera-zione.
Accertarsi che l’attuatore si sia fermato prima di attivare ilmodo di modifica.
4. Messa in funzione
4-30 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Per attivare il modo di modifica con l’ausilio dei tasti:
1. Accertarsi che l’attuatore sia fermo.
2. Premere contemporaneamente tutti e 3 i tasti del CMPX.
Sul display appaiono la lettera A (Amplification stage) e lostadio impostato (in questo caso 02).
(A.02)
Se il modo di modifica è stato attivato accidentalmente,è possibile annullare la procedura disinserendo la tensionedi alimentazione. In questo modo si evita di ripetere la proce-dura di teach-in se è già stata eseguita.
Per modificare i parametri visualizzati, agire sui tasti +/- epremere Enter per confermare i nuovi valori.
Se si modificano i parametri A, C, S, L oppure r:Dopo aver acquisito l’ultimo parametro, il CMPX segnala nuo-vamente lo stato di pronto per la procedura di teach-in (la “t”lampeggia).
Ripristino dello stato di fornitura
Presupposto Il sistema di misura non deve essere collegato. All’uscitaDISABLE_KEYS deve essere applicato il segnale logico 0 esul CPX-MMI non deve essere attivo il Force_Mode.L’alimentazione di aria compressa deve essere scollegata.
Per ripristinare lo stato di fornitura con l’ausilio dei tasti:
1. Scollegare l’alimentazione di aria compressa e di ten-sione.
2. Controllare il collegamento tra CMPX e VPWP.
4. Messa in funzione
4-31Festo P.BE-CPX-CMPX-SYS-IT it 1208b
3. Inserire l’alimentazione di tensione.Il CMPX visualizza per breve tempo l’errore E.43 (nessuncollegamento CAN).
(E.43)
4. Ripristinare il collegamento tra CMPX e VPWP.
5. Premere contemporaneamente tutti e 3 i tasti (> 2 s).
Sul display appare la lettera A (Amplification stage). Ilvalore è stato azzerato.
(A.00)
Impostare nuovamente il valore tramite i tasti +/- e confer-mare con Enter. Poi reimpostare gli altri parametri proce-dendo in modo analogo (vedi par. 4.4.2).

4. Messa in funzione
4-32 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.4.4 Avvio della procedura di teach-in
Presupposti Sulle uscite POS1 ... POS4 deve essere posto un segnalelogico 0. I parametri devono essere impostati correttamente.Il carico massimo ed eventualmente le battute fisse devonoessere montati correttamente. Per poter avviare la proceduradi teach-in con il tasto Teach deve essere applicato il segnalelogico 0 all’uscita DISABLE_KEYS e sul CPX-MMI non deveessere attivo il Force_Mode.
Per preparare la procedura di teach-in, procedere come de-scritto nel paragrafo 4.3.4.
NotaPer evitare danni dovuti alla mancanza di decelerazione neifinecorsa, procedere sempre nel modo seguente:
– alla prima messa in funzione
– dopo aver spostato le battute fisse
– dopo aver modificato i parametri A, C, S, L, r
– oppure dopo aver sostituito i componenti o i tubi flessibili.
1. Assicurarsi che:
• l’alimentazione di aria compressa e la tensione d’eser-cizio del CMPX siano disinserite,
• i suddetti presupposti siano soddisfatti.
2. Inserire la tensione d’esercizio del CMPX. Il CMPX visua-lizza per breve tempo la versione del firmware. In seguitovengono visualizzati i parametri impostati per consentirnela verifica.
3. Inserire l’alimentazione di aria compressa (4 - 8 bar).Poiché la spola della valvola si porta nella posizione cen-trale, la curva asimmetrica tensione-pressione della val-vola proporzionale fa sì che la massa spostata raggiungalentamente un finecorsa.
4. Messa in funzione
4-33Festo P.BE-CPX-CMPX-SYS-IT it 1208b
AvvertenzaElevate forze di accelerazione degli attuatori collegati!Movimenti involontari possono provocare collisioni conrischio di gravi lesioni.
Durante la procedura di teach-in, la massa spostata simuove prima lentamente, poi con la massima velocità eaccelerazione.
• Adottare misure preventive volte a impedire l’accesso dipersone nel campo di influenza degli attuatori per latraslazione e di altri attuatori collegati.
4. Se non è ancora stata avviata la procedura di teach-in,il CMPX segnala lo stato di pronto per tale operazione,
(la “t” lampeggia).
Procedere secondo le istruzioni riportate al punto 5.
Esecuzione di una nuovaprocedura di teach-in
Quando è già stata conclusa la procedura di teach-in,la massa spostata è soggetta a controllo in unaposizione rilevata (posizione 1 ... 4) oppure in unaposizione qualsiasi (P...). Procedere nel seguente modo:
• Tenere premuto il tasto Enter/Teach per almeno 2 se-condi. Il CMPX segnala lo stato di pronto per la proce-dura di teach-in (la “t” lampeggia). L’operazione puòessere interrotta disinserendo l’alimentazione di ten-sione oppure con un segnale di arresto.
Ripetendo tale procedura, si cancellano i valori di assesta-mento. Le posizioni intermedie rilevate in fase di teach-inrimangono invariate.
5. Tenere premuto il tasto Enter/Teach per almeno 2 secondiin modo da avviare la procedura di teach-in.Poi il CMPX esegue la procedura di teach-in. La massaspostata si muove prima lentamente, poi acquista velo-cità. Il display visualizza quanto segue:
I punti lampeggiano alternamente.
4. Messa in funzione
4-34 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
La procedura di teach-in può richiedere alcuni minuti, in fun-zione dell’attuatore utilizzato. Tale operazione è conclusaquando l’attuatore si trova presso il finecorsa della posizione1. Il display visualizza quanto segue:
L’ingresso MC_POS1 porta il segnale logico 1. L’attuatore èora pronto per il funzionamento.
Al termine della procedura di teach-in, sono note le posizionidei finecorsa meccanici (posizione 1 o 2). Ora è possibile rile-vare manualmente le posizioni intermedie (posizione 3 e 4)o attivare un’istruzione traslazione verso i finecorsa (posi-zione 1 o 2).
Dopo ca. 20-30 corse si osserva un miglioramento spontaneodel lavoro dell’attuatore (assestamento). Dopo il rilevamentodelle posizioni intermedie e finali, eseguire sempre 20-30 ciclidi traslazione.

4. Messa in funzione
4-35Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.4.5 Rilevamento delle posizione intermedie
Di seguito si illustrano le modalità di teach-in delle posizioniintermedie con pressione di alimentazione inserita.
Se si desiderano rilevare le posizioni intermedie con pres-sione di alimentazione disinserita (vedi par. 4.3.6), si deveprocedere nello stesso modo. Premendo il tasto� o� lamassa non si muove da sola, ma deve essere portata manual-mente nella posizione intermedia richiesta. Premere comun-que il tasto� o� nella posizione corrispondente.
Presupposto L’attuatore deve essere pronto per il funzionamento. Sulleuscite da POS1 a POS4 deve essere posto un segnale logico0. Quando si esegue la procedura di teach-in con i tasti delCMPX deve essere posto il segnale logico 0 all’uscitaDISABLE_KEYS e sul CPX-MMI non deve essere attivo ilForce_Mode. In funzione della variante, inserire o scollegarela pressione di alimentazione.
Per rilevare una posizione intermedia con la pressione di ali-mentazione inserita, procedere nel modo seguente:
1. Premere brevemente il tasto� o�. Lampeggia il nu-mero della posizione da rilevare (ad es. 3).
Il numero della posizione lampeggia.
2. Se non si desidera rilevare la posizione intermedia visua-lizzata, premere brevemente il tasto Esc. La proceduraviene annullata. Ripetere quindi il passo 1. Lampeggia ilnumero della posizione da rilevare immediatamente suc-cessiva.
4. Messa in funzione
4-36 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
AvvertenzaElevate forze di accelerazione degli attuatori collegati! Mo-vimenti involontari possono provocare collisioni con rischiodi gravi lesioni. Assicurarsi che:
• nessuno possa accedere al campo di influenza degliattuatori per l’azionamento e di altri attuatori collegati.
• sia possibile accedere all’area di traslazione della massaspostata solo se il sistema è stato depressurizzato,
3. Se si desidera rilevare la posizione intermedia visualiz-zata, tenere premuto il tasto� o� per tutto il tempo ditraslazione della massa. La massa si sposta nella dire-zione corrispondente.
4. Rilasciare il tasto nel momento in cui la massa si devefermare. La massa si ferma sotto controllo nella posizioneattuale.
5. Ripetere i punti 3 e 4 finché la massa spostata non rag-giunge la posizione richiesta.
Il numero della posizione lampeggia.
6. Una volta raggiunta la posizione richiesta, confermare conEnter (> 2 s ), per memorizzarla. La posizione attuale vienememorizzata come posizione intermedia. L’ingressoMC_POS3 oppure MC_POS4 porta il segnale logico 1.
Nessun lampeggio.
7. Per rilevare la posizione intermedia successiva, ripetere lesuddette operazioni partendo dal punto 1.
Precisione di ripetibilità Per quanto riguarda il raggiungimento delle posizioni inter-medie, la ripetibilità dipende dal tipo di attuatore e dalla lun-ghezza del sistema di misura. ± 0,25 % della lunghezza delsistema di misura, ma almeno ± 2 mm.

4. Messa in funzione
4-37Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Per garantire un buon posizionamento con la precisione diripetibilità indicata, attenersi alle indicazioni qui di seguitoriportate.
– La posizione intermedia e quella finale dell’attuatoredevono essere distanziate tra loro di almeno il 10 % dellacorsa complessiva del cilindro oppure dell’intero angolodi oscillazione, per garantire un cuscinetto d’aria suffi-ciente.
– I percorsi tra le posizioni rilevate non dovrebbero essereinferiori al 3 % della corsa complessiva del cilindro odell’intero angolo di oscillazione.Nel caso di attuatori lineari e cilindri, i tratti di traslazionedovrebbero avere una lunghezza minima di 20 mm.
– Se le posizioni intermedie 3 e 4 si trovano nella stessaposizione, e se si effettua la traslazione verso una diqueste posizioni intermedie (ad es. verso la posizione 3),al suo raggiungimento viene impostato solo l’ingressocorrispondente al comando (ad es. MC_POS3). L’uscitadell’altra posizione intermedia viene impostata solo incaso di superamento per 50 ms (funzionamento delsensore).
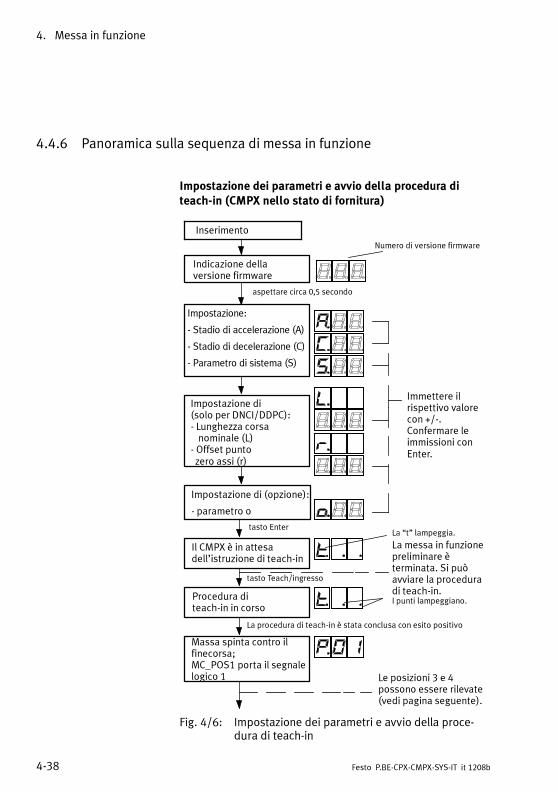
4. Messa in funzione
4-38 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.4.6 Panoramica sulla sequenza di messa in funzione
Impostazione dei parametri e avvio della procedura diteach-in (CMPX nello stato di fornitura)
Inserimento
Impostazione di(solo per DNCI/DDPC):- Lunghezza corsanominale (L)
- Offset puntozero assi (r)
Impostazione:
- Stadio di accelerazione (A)
- Stadio di decelerazione (C)
- Parametro di sistema (S)
Immettere ilrispettivo valorecon +/-.Confermare leimmissioni conEnter.
Il CMPX è in attesadell’istruzione di teach-in
La messa in funzionepreliminare èterminata. Si puòavviare la proceduradi teach-in.Procedura di
teach-in in corso
La procedura di teach-in è stata conclusa con esito positivo
Massa spinta contro ilfinecorsa;MC_POS1 porta il segnalelogico 1 Le posizioni 3 e 4
possono essere rilevate(vedi pagina seguente).
La “t” lampeggia.
I punti lampeggiano.
tasto Enter
tasto Teach/ingresso
Numero di versione firmware
Indicazione dellaversione firmware
aspettare circa 0,5 secondo
Impostazione di (opzione):
- parametro o
Fig. 4/6: Impostazione dei parametri e avvio della proce-dura di teach-in
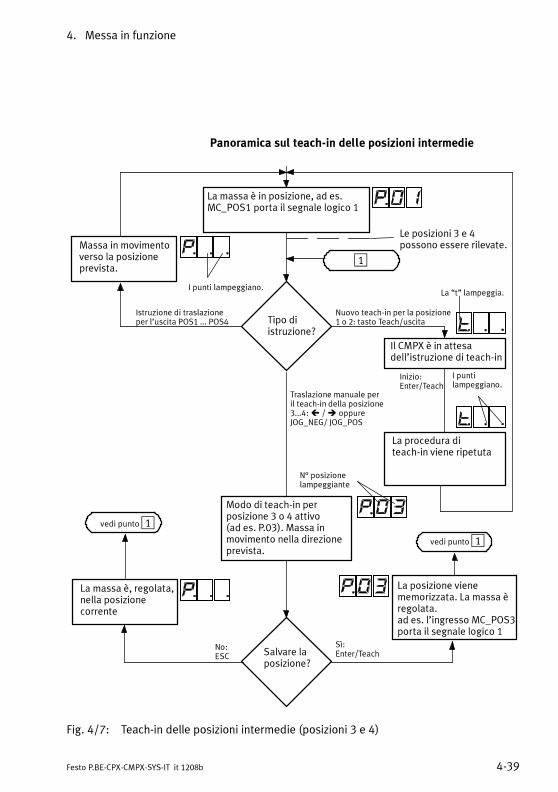
4. Messa in funzione
4-39Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Panoramica sul teach-in delle posizioni intermedie
Tipo diistruzione?
La massa è in posizione, ad es.MC_POS1 porta il segnale logico 1
Le posizioni 3 e 4possono essere rilevate.
Traslazione manuale peril teach-in della posizione3...4:� /� oppureJOG_NEG/ JOG_POS
Nuovo teach-in per la posizione1 o 2: tasto Teach/uscita
Il CMPX è in attesadell’istruzione di teach-in
Istruzione di traslazioneper l’uscita POS1 ... POS4
Massa in movimentoverso la posizioneprevista.
Modo di teach-in perposizione 3 o 4 attivo(ad es. P.03). Massa inmovimento nella direzioneprevista.
Salvare laposizione?
Sì:Enter/Teach
No:ESC
La massa è, regolata,nella posizionecorrente
La posizione vienememorizzata. La massa èregolata.ad es. l’ingresso MC_POS3porta il segnale logico 1
N° posizionelampeggiante
vedi punto1
vedi punto1
1
I puntilampeggiano.
I punti lampeggiano.La “t” lampeggia.
La procedura diteach-in viene ripetuta
Inizio:Enter/Teach
Fig. 4/7: Teach-in delle posizioni intermedie (posizioni 3 e 4)
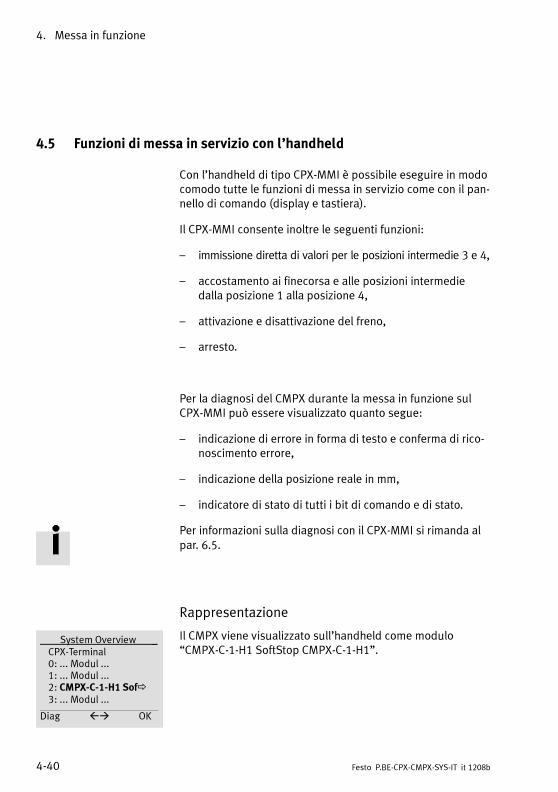
4. Messa in funzione
4-40 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.5 Funzioni di messa in servizio con l’handheld
Con l’handheld di tipo CPX-MMI è possibile eseguire in modocomodo tutte le funzioni di messa in servizio come con il pan-nello di comando (display e tastiera).
Il CPX-MMI consente inoltre le seguenti funzioni:
– immissione diretta di valori per le posizioni intermedie 3 e 4,
– accostamento ai finecorsa e alle posizioni intermediedalla posizione 1 alla posizione 4,
– attivazione e disattivazione del freno,
– arresto.
Per la diagnosi del CMPX durante la messa in funzione sulCPX-MMI può essere visualizzato quanto segue:
– indicazione di errore in forma di testo e conferma di rico-noscimento errore,
– indicazione della posizione reale in mm,
– indicatore di stato di tutti i bit di comando e di stato.
Per informazioni sulla diagnosi con il CPX-MMI si rimanda alpar. 6.5.
Rappresentazione
Il CMPX viene visualizzato sull’handheld come modulo“CMPX-C-1-H1 SoftStop CMPX-C-1-H1”.
System Overview _CPX-Terminal0: ... Modul ...1: ... Modul ...2: CMPX-C-1-H1 Sof�3: ... Modul ...
_____________________________________________________
Diag �� OK
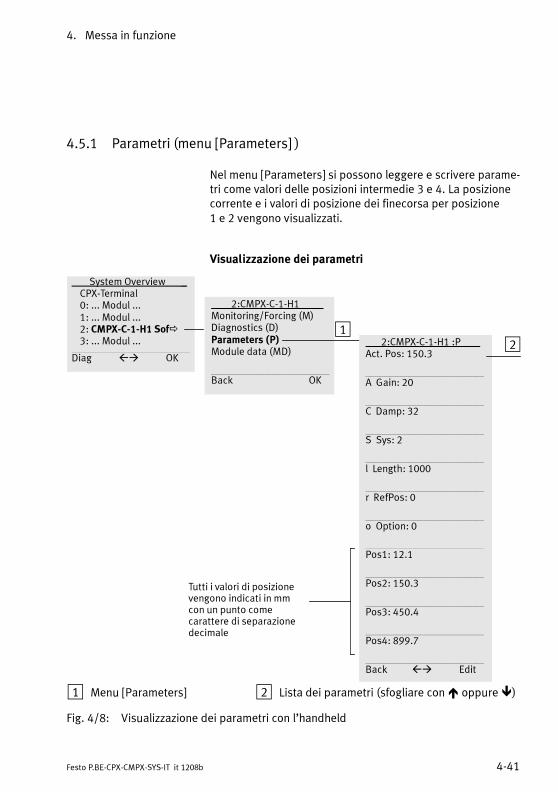
4. Messa in funzione
4-41Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.5.1 Parametri (menu [Parameters] )
Nel menu [Parameters] si possono leggere e scrivere parame-tri come valori delle posizioni intermedie 3 e 4. La posizionecorrente e i valori di posizione dei finecorsa per posizione1 e 2 vengono visualizzati.
Visualizzazione dei parametri
System Overview _CPX-Terminal0: ... Modul ...1: ... Modul ...2: CMPX-C-1-H1 Sof�3: ... Modul ...
_____________________________________________________
Diag �� OK
1
2:CMPX-C-1-H1 _Monitoring/Forcing (M)Diagnostics (D)Parameters (P)Module data (MD)
_____________________________________________________
Back OK
2:CMPX-C-1-H1 :P _Act. Pos: 150.3
_____________________________________________________
A Gain: 20
_____________________________________________________
C Damp: 32
_____________________________________________________
S Sys: 2
_____________________________________________________
l Length: 1000
_____________________________________________________
r RefPos: 0
_____________________________________________________
o Option: 0
_____________________________________________________
Pos1: 12.1
_____________________________________________________
Pos2: 150.3
_____________________________________________________
Pos3: 450.4
_____________________________________________________
Pos4: 899.7
_____________________________________________________
Back �� Edit
2
Tutti i valori di posizionevengono indicati in mmcon un punto comecarattere di separazionedecimale
1 Menu [Parameters] 2 Lista dei parametri (sfogliare con� oppure�)
Fig. 4/8: Visualizzazione dei parametri con l’handheld

4. Messa in funzione
4-42 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
I valori di posizione vengono visualizzati con la risoluzione di0,1 mm. Il valore di default della lunghezza per il potenziome-tro è 1000 (Z 100,0 mm). Questo valore può essere corretto inqualsiasi lunghezza di potenziometro nel caso del sistema dimisura con potenziometro mediante l’MMI o lo scaricamentodi parametri (non mediante tastiera). Le indicazioni della posi-zione (Pos1, Pos2, Pos3, Pos4) si modificano di conseguenza.
L’immissione di una lunghezza sbagliata per il potenziometronon influenza la funzione.
Modifica dei parametri
È possibile selezionare parametri modificabili (cornice). Sipuò quindi modificare il parametro selezionato con “Edit”.
Per questa operazione è necessario l’accesso per scritturaper l’handheld che viene richiesto. Informazioni sull’attiva-zione e la disattivazione dell’accesso per scrittura sono ripor-tate nella descrizione dell’handheld CPX-MMI.
Con un “Handheld write access” attivato si può modificare ilparametro selezionato con il tasto� o�.
Confermare il valore impostato con “Set”.
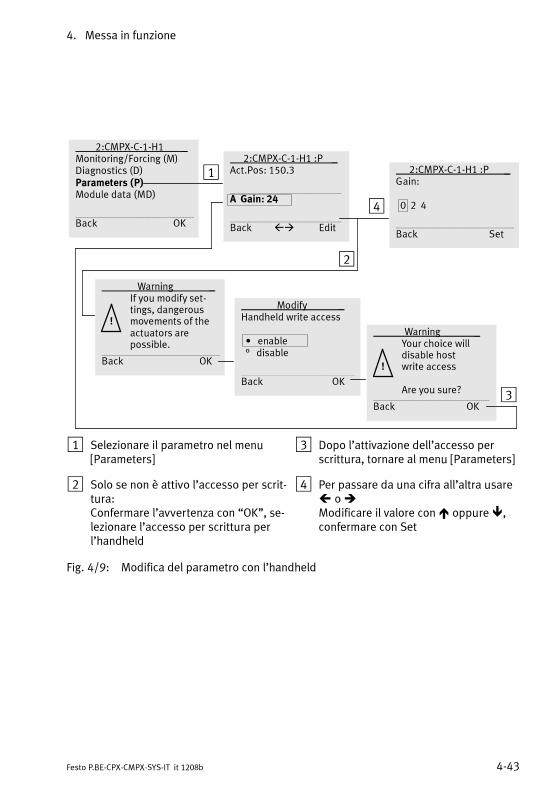
4. Messa in funzione
4-43Festo P.BE-CPX-CMPX-SYS-IT it 1208b
2:CMPX-C-1-H1 :P _Act.Pos: 150.3
__________________________________________________
A Gain: 24
__________________________________________________
Back �� Edit
1
2
Warning _If you modify set-tings, dangerous
! movements of theactuators arepossible.
_____________________________________________________
Back OK
Modify _Handheld write access
• enable° disable
___________________________________________________
Back OK
Warning _Your choice willdisable host
! write access
Are you sure?____________________________________________________
Back OK
4
3
2:CMPX-C-1-H1 :P _Gain:
0 2 4
_____________________________________________________
Back Set
2:CMPX-C-1-H1 _Monitoring/Forcing (M)Diagnostics (D)Parameters (P)Module data (MD)
_____________________________________________________
Back OK
1 Selezionare il parametro nel menu[Parameters]
2 Solo se non è attivo l’accesso per scrit-tura:Confermare l’avvertenza con “OK”, se-lezionare l’accesso per scrittura perl’handheld
3 Dopo l’attivazione dell’accesso perscrittura, tornare al menu [Parameters]
4 Per passare da una cifra all’altra usare� o�Modificare il valore con� oppure�,confermare con Set
Fig. 4/9: Modifica del parametro con l’handheld

4. Messa in funzione
4-44 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.5.2 Stato di segnale del CMPX (menu [Monitoring/Forcing] )
Nel menu [Monitoring/Forcing] è possibile ottenere la visua-lizzazione degli stati di segnale dei bit di ingresso/uscita(stati dei dati di processo) del CMPX.
System Overview _CPX-Terminal0: ... Modul ...1: ... Modul ...2: CMPX-C-1-H1 Sof�3: ... Modul ...
_____________________________________________________
Diag �� OK
12:CMPX-C-1-H1 _Monitoring/Forcing (M)Diagnostics (D)Parameters (P)Module data (MD)
_____________________________________________________
Back OK
2:CMPX-C-1-H1 :M _Process state
I: MC Pos1 °I: MC Pos2 °I: MC Pos3 °I: MC Pos4 °I: Stop °I: Ready •I: Fault °I: Teach active °I: Brake °
O: Pos1 °O: Pos2 °O: Pos3 °O: Pos4 °O: Stop °O: Jog neg °O: Jog pos °O: Reset fault °O: Retain Pos3 °O: Retain Pos4 °O: Teach °O: Brake °O: Disable Keys °
_____________________________________________________
Back Force mode
2
Stato dei bit dicomando e di stato:
° : segnale logico 0• : segnale logico 1
1 Menu [Monitoring/Forcing] 2 Stato dei bit di ingresso/uscita del CMPX(sfogliare con� oppure�)
Fig. 4/10: Display dei bit di ingresso/uscita con l’handheld
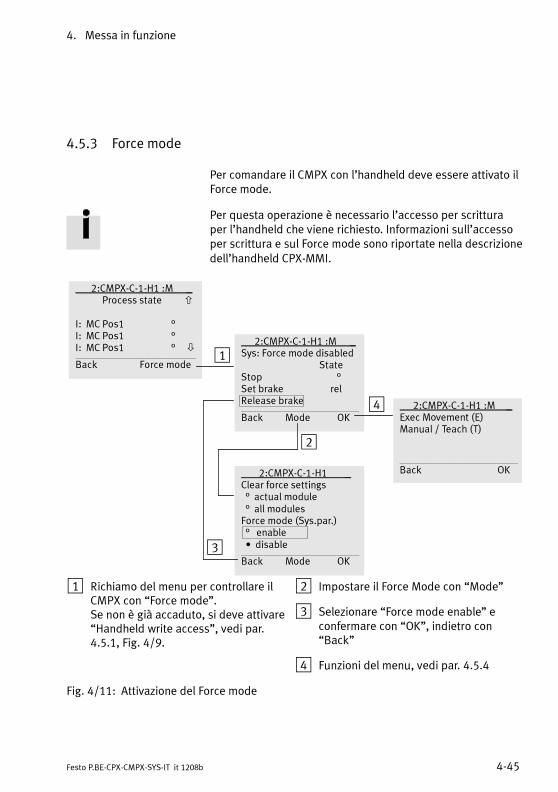
4. Messa in funzione
4-45Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.5.3 Force mode
Per comandare il CMPX con l’handheld deve essere attivato ilForce mode.
Per questa operazione è necessario l’accesso per scritturaper l’handheld che viene richiesto. Informazioni sull’accessoper scrittura e sul Force mode sono riportate nella descrizionedell’handheld CPX-MMI.
2:CMPX-C-1-H1 _Clear force settings° actual module° all modulesForce mode (Sys.par.)° enable• disable
_____________________________________________________
Back Mode OK
2:CMPX-C-1-H1 :M _Sys: Force mode disabled
StateStop °Set brake relRelease brake_____________________________________________________
Back Mode OK
2:CMPX-C-1-H1 :M _Process state �
I: MC Pos1 °I: MC Pos1 °I: MC Pos1 ° �______________________________________________________
Back Force mode1
4 2:CMPX-C-1-H1 :M _Exec Movement (E)Manual / Teach (T)
_____________________________________________________
Back OK
2
3
1 Richiamo del menu per controllare ilCMPX con “Force mode”.Se non è già accaduto, si deve attivare“Handheld write access”, vedi par.4.5.1, Fig. 4/9.
2 Impostare il Force Mode con “Mode”
3 Selezionare “Force mode enable” econfermare con “OK”, indietro con“Back”
4 Funzioni del menu, vedi par. 4.5.4
Fig. 4/11: Attivazione del Force mode
4. Messa in funzione
4-46 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Quando il Force Mode è attivo vengono impostati il control-byte 1 su 0x00 e il controlbyte 2 su 0x80 (la tastiera del CMPXè bloccata).
Anche quando si esce dal menu [Exec. Movement] (ExecuteMovement, Esegui il movimento) e [Manual/Teach] (Trasla-zione manuale/programmazione mediante “teach-in”) il con-trolbyte1 viene impostato su 0x00 e il controlbyte2 viene im-postato su 0x80.
In altre parole:
– Nessuna traslazione
– BRAKE = 0, freno non attivato(24 V, freno disinserito)
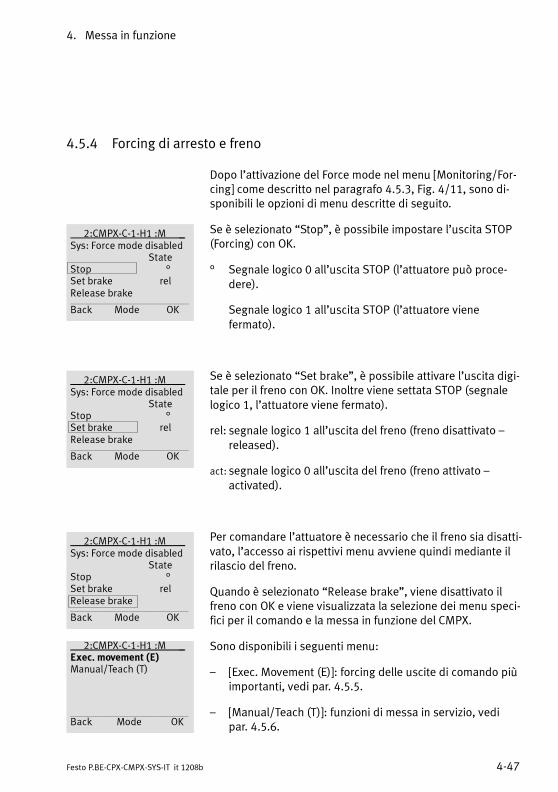
4. Messa in funzione
4-47Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.5.4 Forcing di arresto e freno
Dopo l’attivazione del Force mode nel menu [Monitoring/For-cing] come descritto nel paragrafo 4.5.3, Fig. 4/11, sono di-sponibili le opzioni di menu descritte di seguito.
Se è selezionato “Stop”, è possibile impostare l’uscita STOP(Forcing) con OK.
° Segnale logico 0 all’uscita STOP (l’attuatore può proce-dere).
Segnale logico 1 all’uscita STOP (l’attuatore vienefermato).
Se è selezionato “Set brake”, è possibile attivare l’uscita digi-tale per il freno con OK. Inoltre viene settata STOP (segnalelogico 1, l’attuatore viene fermato).
rel: segnale logico 1 all’uscita del freno (freno disattivato –released).
act: segnale logico 0 all’uscita del freno (freno attivato –activated).
Per comandare l’attuatore è necessario che il freno sia disatti-vato, l’accesso ai rispettivi menu avviene quindi mediante ilrilascio del freno.
Quando è selezionato “Release brake”, viene disattivato ilfreno con OK e viene visualizzata la selezione dei menu speci-fici per il comando e la messa in funzione del CMPX.
Sono disponibili i seguenti menu:
– [Exec. Movement (E)]: forcing delle uscite di comando piùimportanti, vedi par. 4.5.5.
– [Manual/Teach (T)]: funzioni di messa in servizio, vedipar. 4.5.6.
2:CMPX-C-1-H1 :M _Sys: Force mode disabled
StateStop °Set brake relRelease brake_____________________________________________________
Back Mode OK
2:CMPX-C-1-H1 :M _Sys: Force mode disabled
StateStop °Set brake relRelease brake_____________________________________________________
Back Mode OK
2:CMPX-C-1-H1 :M _Sys: Force mode disabled
StateStop °Set brake relRelease brake_____________________________________________________
Back Mode OK
2:CMPX-C-1-H1 :M _Exec. movement (E)Manual/Teach (T)
_____________________________________________________
Back Mode OK

4. Messa in funzione
4-48 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.5.5 Comando (menu [Exec. Movement] )
Con il Force Mode attivato è possibile emettere istruzioni di tra-slazione con il menu [Monitoring/Forcing] [Exec. movement].
A questo scopo sono necessari l’accesso per scrittura e ForceMode per l’handheld. Per informazioni sull’accesso per scritturae sul Force Mode vedi descrizione dell’handheld CPX-MMI.
Se necessario attivare il Force Mode con “Mode” nel menu[Monitoring/Forcing] (vedi par. 4.5.3)
1
2
2:CMPX-C-1-H1 :M _Exec. movement (E)Manual/Teach (T)
_____________________________________________________
Back OK
3
Stato dei bit di stato:– MC_POS1– MC_POS2– MC_POS3– MC_POS4– STOP° : segnale logico 0: segnale logico 1
Viene segnalato ilraggiungimento dellaposizione (MC_POS...) ol’inattività dell’asse dopol’arresto:
• : posizione raggiunta /attuatore fermato
2:CMPX-C-1-H1 :E _Sys: Force mode disabled
StatePos1 °Pos2 •Pos3 °Pos4 °Stop °
_____________________________________________________
Back Set
2:CMPX-C-1-H1 :E _Sys: Force mode enabled
StatePos1 °Pos2 •Pos3 °Pos4 °Stop °
_____________________________________________________
Back Set
1 Se appare Force mode disabled:solo display dei bit di stato
2 Se appare Force mode enabled:settare le uscite di comando
3 Selezionare l’uscita e impostarla con“Set”:l’istruzione viene eseguita.
Fig. 4/12: Comando (menu [Exec. Movement] )

4. Messa in funzione
4-49Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.5.6 Traslazione manuale/programmazione mediante “teach-in”(Menu [Manual/Teach] )
Con il Force mode attivato è possibile la traslazione “manuale”dell’attuatore con il menu [Monitoring/Forcing] [Manual/Teach].Si può inoltre avviare una procedura di teach-in o accettare laposizione corrente come posizione intermedia 3 o 4.
A questo scopo sono necessari l’accesso per scrittura e Forcemode per l’handheld. Per ulteriori informazioni sull’accessoper scrittura e sul Force mode vedi descrizione dell’handheldCPX-MMI.
Se necessario attivare il Force Mode con “Mode” nel menu[Monitoring/Forcing] (vedi par. 4.5.3)
2:CMPX-C-1-H1 :T _Sys: Force mode enabledSet° Jog neg° Jog pos
Retain Pos3Retain Pos4Start teach
_____________________________________________________
Back Set
2:CMPX-C-1-H1 :T _
Teach mode active
_____________________________________________________
_
Back Stop
2
2:CMPX-C-1-H1 :M _Exec. movement (E)Manual/Teach (T)
_____________________________________________________
Back Mode OK
• : JOG_NEG/JOG_POSsettato
2:CMPX-C-1-H1 :T _Sys: Force mode disabledSet° Jog neg° Jog pos
Retain Pos3Retain Pos4Start teach
_____________________________________________________
Back Set
1
43
1 Se appare Force mode disabled:solo display (nessuna funzione)
2 Se appare Force mode enabled:la funzione può essere eseguita
3 Selezionare la funzione e impostarlacon “Set”:l’istruzione viene eseguita.(vedi Tab. 4/5)
4 Display per la procedura di teach-in
Fig. 4/13: Traslazione manuale / programmazione mediante “teach-in”(Menu [Manual/Teach] )
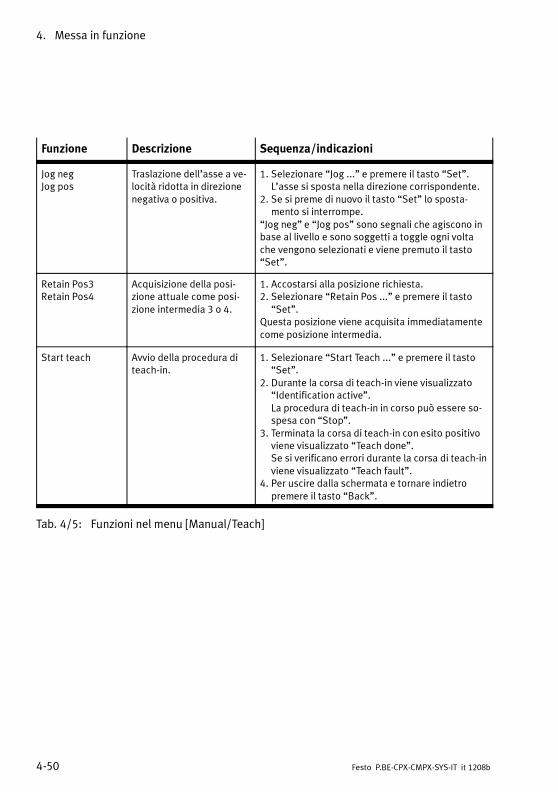
4. Messa in funzione
4-50 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Funzione Descrizione Sequenza/indicazioni
Jog negJog pos
Traslazione dell’asse a ve-locità ridotta in direzionenegativa o positiva.
1. Selezionare “Jog ...” e premere il tasto “Set”.L’asse si sposta nella direzione corrispondente.
2. Se si preme di nuovo il tasto “Set” lo sposta-mento si interrompe.
“Jog neg” e “Jog pos” sono segnali che agiscono inbase al livello e sono soggetti a toggle ogni voltache vengono selezionati e viene premuto il tasto“Set”.
Retain Pos3Retain Pos4
Acquisizione della posi-zione attuale come posi-zione intermedia 3 o 4.
1. Accostarsi alla posizione richiesta.2. Selezionare “Retain Pos ...” e premere il tasto
“Set”.Questa posizione viene acquisita immediatamentecome posizione intermedia.
Start teach Avvio della procedura diteach-in.
1. Selezionare “Start Teach ...” e premere il tasto“Set”.
2. Durante la corsa di teach-in viene visualizzato“Identification active”.La procedura di teach-in in corso può essere so-spesa con “Stop”.
3. Terminata la corsa di teach-in con esito positivoviene visualizzato “Teach done”.Se si verificano errori durante la corsa di teach-inviene visualizzato “Teach fault”.
4. Per uscire dalla schermata e tornare indietropremere il tasto “Back”.
Tab. 4/5: Funzioni nel menu [Manual/Teach]
4. Messa in funzione
4-51Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.6 Indicazioni per l’esercizio
4.6.1 Indicazioni generali per l’esercizio
AvvertenzaElevate forze di accelerazione degli attuatori collegati! Movi-menti involontari possono provocare collisioni con rischio digravi lesioni.
• Inserimento:Inserire sempre prima l’alimentazione di tensione, quindil’alimentazione di aria compressa.
• Disinserimento:Prima di eseguire lavori di montaggio, installazione e ma-nutenzione, disinserire l’alimentazione dell’aria compressae della tensione contemporaneamente o nel seguente or-dine:1. alimentazione dell’aria compressa2. alimentazione di tensione dell’elettronica/dei sensori3. alimentazione della tensione di carico alle uscite/valvole
NotaIl superamento dei valori limite ammessi di carichi, mo-menti d’inerzia di massa, frequenze di oscillazione, ecc.può causare danni. Accertarsi di rispettare i valori limiteindicati per l’attuatore utilizzato (vedi istruzioni per l’usodel tipo corrispondente).
NotaAllo scopo di evitare danni dovuti al raggiungimento deifinecorsa senza decelerazione:
• Dopo aver spostato le battute fisse o sostituito compo-nenti e tubi flessibili, ripetere la procedura di teach-in.
• Rispettare i carichi ammessi.
4. Messa in funzione
4-52 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Istruzioni di traslazione Dopo l’inserimento della tensione d’esercizio si deve atten-dere finché l’ingresso READY non fornisce un segnale logico1. Dopodiché si può eseguire l’istruzione di traslazione corri-spondente con un fronte positivo sulle uscite POS1 ... POS4,vedi par. 5.3, Tab. 5/5.
Corsa di riferimento dopoPOWER ON
Solo per trasduttori di posizione incrementali:Quando viene reinserita la tensione d’esercizio del CMPX ilnesso tra valore di misura e posizione corrente va perso.Perciò eseguire sempre una corsa di riferimento dopo unnuovo inserimento della tensione. La corsa di riferimentopuò essere eseguita verso il finecorsa per la posizione 1 o laposizione 2.
Avvio della corsadi riferimento
Dopo l’inserimento dell’alimentazione di tensione, la corsadi riferimento viene avviata mediante un’istruzione di trasla-zione verso la posizione 1 o 2.
Altre istruzioni di traslazione non sono ammissibili dopo l’in-serimento dell’alimentazione di tensione e determinano l’er-rore E.10 (non è stata eseguita nessuna corsa di riferimento).
Sequenza della corsadi riferimento
Se al momento dell’avvio della corsa di riferimento l’attua-tore è già nella posizione del finecorsa desiderata:Non è possibile un movimento verso tale posizione. Vieneeseguita brevemente una ventilazione in direzione oppostaper controllare se l’alimentazione di aria compressa mancao se l’attuatore è già presso il finecorsa.
L’attuatore esegue un breve movimento di compensazione indirezione opposta.
Se al momento dell’avvio della corsa di riferimento l’attuatorenon è ancora nella posizione del finecorsa desiderata:L’attuatore si sposta lentamente verso tale posizione.
Durante la corsa di riferimento appare il messaggio “rEF”.La corsa di riferimento è terminata se la massa spostata vienepremuta contro il relativo finecorsa (posizione 1 o 2) e l’uscitaassegnata (MC_POS1 o MC_POS2) porta il segnale logico 1.

4. Messa in funzione
4-53Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.6.2 La prima istruzione di traslazione
Nel momento in cui riceve la prima istruzione di traslazione ilCMPX verifica se la massa si sposta nella direzione richiesta.Se la massa si sposta nella direzione sbagliata, il CMPX dia-gnostica un collegamento difettoso dell’impianto e segnalal’errore E.13 (direzione di movimento errata). Il CMPX reagi-sce nel modo seguente:
– la spola della valvola proporzionale di controllo portataviene spostato nella posizione centrale (flusso bloccato),
– l’uscita FAULT porta il segnale logico 1,
– non vengono più accettate istruzioni di traslazione.
Questa funzione di sicurezza permette di evitare danni dovutiad attacchi scambiati.
In caso di collegamento errato dell’impianto:
• Disinserire la tensione d’esercizio e correggere il collega-mento.
Se, all’inserzione della tensione d’esercizio, la massa spo-stata si trova già presso un finecorsa, viene generata un’istru-zione di traslazione in questa posizione, spingendovi controla massa. Anche se l’attuatore esce dalla posizione del fine-corsa invece di mantenerla, il CMPX diagnostica un collega-mento scorretto dell’impianto e segnala un errore. Questomalfunzionamento potrebbe però essere dovuto anche alleseguenti cause:
– l’alimentazione di aria compressa è ancora disinserita,L’attuatore è stato spostato manualmente, è uscito dallaposizione del finecorsa per effetto di forze esterne oppuresi muove autonomamente (ad es. in caso di posizione dimontaggio verticale),
– a causa di un’alimentazione di aria troppo rapida dell’im-pianto, l’attuatore esce per breve tempo dalla posizionedel finecorsa (formazione asimmetrica della pressionenelle camere del cilindro).

4. Messa in funzione
4-54 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Per evitare simili cause, procedere nel modo seguente:
• Alimentare tutto l’impianto lentamente con aria (ad es.con una valvola di inserimento progressivo tipo HEL-...o HEM-...). I movimenti degli attuatori risulteranno quindicontrollati.
• Una volta inserita la tensione d’esercizio, assicurarsi chela massa spostata non esca dalla posizione del finecorsané spingendola manualmente né in automatico, ad es.servendosi di un’unità di serraggio.
4. Messa in funzione
4-55Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4.6.3 Traslazione manuale
Con il pannello di comando
Presupposto L’attuatore deve essere pronto per il funzionamento. Sulleuscite POS1 ... POS4 deve essere posto un segnale logico 0.All’uscita DISABLE_KEYS deve essere posto il segnale logico0 e sul CPX-MMI non deve essere attivo il Force_Mode.
La massa spostata può essere traslata manualmente tramitei tasti� o�.
Tasto Descrizione
�/– Riduzione del valore della posizione (la massa si avvi-cina lentamente allo zero del sistema di misura)
+/� Aumento del valore della posizione (la massa si allon-tana lentamente dallo zero del sistema di misura)
Per traslare la massa manualmente:
• Tenere premuto il tasto corrispondente (� o�) per tuttoil tempo di traslazione della massa.
• Rilasciare il tasto per arrestare la massa.
Il numero della posizione lampeggiante indica che è possibilememorizzare la posizione attuale come posizione intermediapremendo il tasto Enter (vedi par. 4.4.5).
Con l’handheld
Con il Force mode attivato: Menu [Monitoring/Forcing][Manual/Teach], funzione “Jog neg” e “Jog pos” (vedipar. 4.5.6).

4. Messa in funzione
4-56 Festo P.BE-CPX-CMPX-SYS-IT it 1208b

Messa in funzione e comando con nodo bus CPX o
CPX-FEC
5-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Capitolo 5
Messa in funzione e comando con nodo bus CPX o CPX-FEC
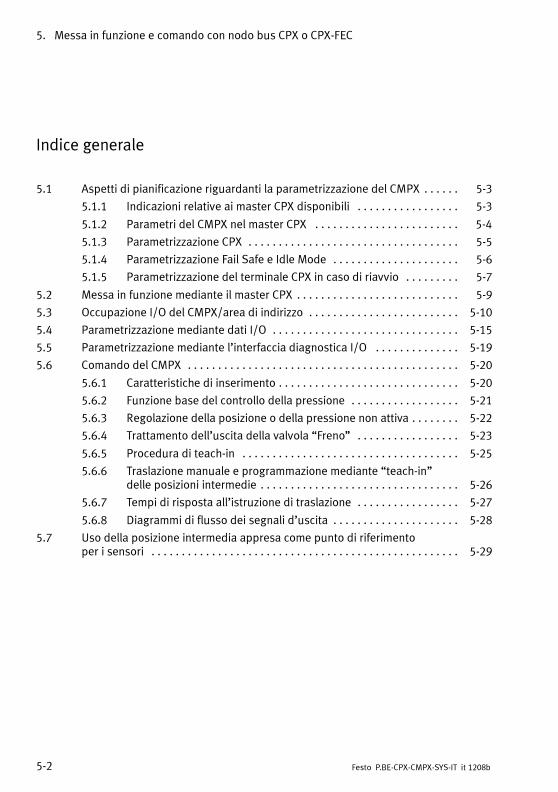
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
5.1 Aspetti di pianificazione riguardanti la parametrizzazione del CMPX 5-3. . . . . .
5.1.1 Indicazioni relative ai master CPX disponibili 5-3. . . . . . . . . . . . . . . . .
5.1.2 Parametri del CMPX nel master CPX 5-4. . . . . . . . . . . . . . . . . . . . . . . .
5.1.3 Parametrizzazione CPX 5-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.4 Parametrizzazione Fail Safe e Idle Mode 5-6. . . . . . . . . . . . . . . . . . . . .
5.1.5 Parametrizzazione del terminale CPX in caso di riavvio 5-7. . . . . . . . .
5.2 Messa in funzione mediante il master CPX 5-9. . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Occupazione I/O del CMPX/area di indirizzo 5-10. . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Parametrizzazione mediante dati I/O 5-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Parametrizzazione mediante l’interfaccia diagnostica I/O 5-19. . . . . . . . . . . . . .
5.6 Comando del CMPX 5-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.1 Caratteristiche di inserimento 5-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.2 Funzione base del controllo della pressione 5-21. . . . . . . . . . . . . . . . . .
5.6.3 Regolazione della posizione o della pressione non attiva 5-22. . . . . . . .
5.6.4 Trattamento dell’uscita della valvola “Freno” 5-23. . . . . . . . . . . . . . . . .
5.6.5 Procedura di teach-in 5-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.6 Traslazione manuale e programmazione mediante “teach-in”delle posizioni intermedie 5-26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.7 Tempi di risposta all’istruzione di traslazione 5-27. . . . . . . . . . . . . . . . .
5.6.8 Diagrammi di flusso dei segnali d’uscita 5-28. . . . . . . . . . . . . . . . . . . . .
5.7 Uso della posizione intermedia appresa come punto di riferimentoper i sensori 5-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.1 Aspetti di pianificazione riguardanti la parametrizzazione del CMPX
5.1.1 Indicazioni relative ai master CPX disponibili
La Tab. 5/1 mostra un quadro riassuntivo dei master CPXdisponibili (CPX-FEC oppure nodo bus CPX) con l’idoneitàall’esercizio CMPX (versione luglio 2012).
Nodo bus/FEC Supporto/esercizio Descrizione speciale
CPX-CEC adatto non compreso
CPX-FEC adatto Appendice B.1
CPX-FB6 (Interbus) adatto non compreso
CPX-FB11 (DeviceNet) adatto Appendice B.3
CPX-FB13 (PROFIBUS-DP) adatto Appendice B.2
CPX-FB14 (CANopen) adatto non compreso
CPX-FB23 (CC-Link) adatto non compreso
CPX-FB32 (EtherNet/IP) adatto non compreso
CPX-FB33 (PROFINET, M12) adatto non compreso
CPX-FB34 (PROFINET, RJ45) adatto non compreso
CPX-FB35 (PROFINET, SCRJ) adatto non compreso
CPX-FB38 (EtherCat) adatto non compreso
CPX-SF34, CPX-SF35(PCWORX, PROFINET)
adatto non compreso
Tab. 5/1: Indicazioni nodo bus CPX/CPX-FEC
Si trovano indicazioni generali per la parametrizzazione nelladescrizione del nodo bus CPX o sul CPX-FEC utilizzato.
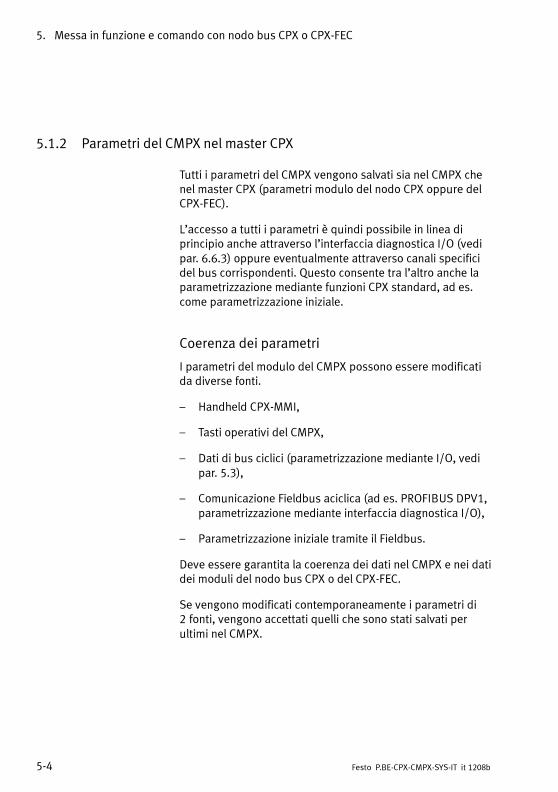
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.1.2 Parametri del CMPX nel master CPX
Tutti i parametri del CMPX vengono salvati sia nel CMPX chenel master CPX (parametri modulo del nodo CPX oppure delCPX-FEC).
L’accesso a tutti i parametri è quindi possibile in linea diprincipio anche attraverso l’interfaccia diagnostica I/O (vedipar. 6.6.3) oppure eventualmente attraverso canali specificidel bus corrispondenti. Questo consente tra l’altro anche laparametrizzazione mediante funzioni CPX standard, ad es.come parametrizzazione iniziale.
Coerenza dei parametri
I parametri del modulo del CMPX possono essere modificatida diverse fonti.
– Handheld CPX-MMI,
– Tasti operativi del CMPX,
– Dati di bus ciclici (parametrizzazione mediante I/O, vedipar. 5.3),
– Comunicazione Fieldbus aciclica (ad es. PROFIBUS DPV1,parametrizzazione mediante interfaccia diagnostica I/O),
– Parametrizzazione iniziale tramite il Fieldbus.
Deve essere garantita la coerenza dei dati nel CMPX e nei datidei moduli del nodo bus CPX o del CPX-FEC.
Se vengono modificati contemporaneamente i parametri di2 fonti, vengono accettati quelli che sono stati salvati perultimi nel CMPX.
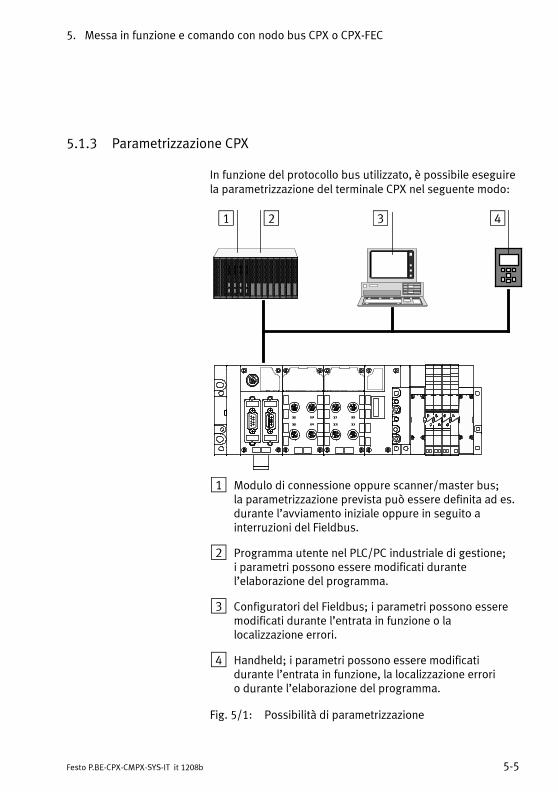
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.1.3 Parametrizzazione CPX
In funzione del protocollo bus utilizzato, è possibile eseguirela parametrizzazione del terminale CPX nel seguente modo:
1 2 3 4
1 Modulo di connessione oppure scanner/master bus;la parametrizzazione prevista può essere definita ad es.durante l’avviamento iniziale oppure in seguito ainterruzioni del Fieldbus.
2 Programma utente nel PLC/PC industriale di gestione;i parametri possono essere modificati durantel’elaborazione del programma.
3 Configuratori del Fieldbus; i parametri possono esseremodificati durante l’entrata in funzione o lalocalizzazione errori.
4 Handheld; i parametri possono essere modificatidurante l’entrata in funzione, la localizzazione errorio durante l’elaborazione del programma.
Fig. 5/1: Possibilità di parametrizzazione

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.1.4 Parametrizzazione Fail Safe e Idle Mode
Controllare in funzione della propria applicazione e delmaster CPX utilizzato se è necessaria una parametrizzazioneFail Safe oppure Idle Mode.
La parametrizzazione Fail Safe oppure Idle Mode consente laproduzione di stati di I/O definiti in caso di guasto del bus oquando il PLC passa allo stato ’Stop’.Nel caso del CMPX questo avviene di norma con l’orienta-mento a byte.
Per il CMPX viene stabilito il comportamento nell’Idle Mode oFail Safe mediante la definizione dello stato dei Controllbyte(byte di ingresso di CMPX, dati di uscita del modulo, “Canale0 e 1”).
Per informazioni basilari circa la parametrizzazione FailSafe o Idle Mode si rimanda alla descrizione del sistemaCPX P.BE-CPX-SYS-... nell’appendice “Intervento su stati disegnale”.
Le funzioni supportate sono menzionate nella descrizione delnodo bus CPX o del CPX-FEC utilizzato.Nelle appendici B.1 (CPX-FEC), B.2 (CPX-FB13) e B.3(CPX-FB11) viene fornito un esempio.
Parametrizzazioni Fail Safe e Idle Mode opportune
Comportamento in caso di er-rore/ guasto del bus
Segnali dicomando
Controlbyte 1) Valore(decimale)
Si deve fermare l’attuatore e atti-vare il freno. 2)
STOP = 1BRAKE = 1tutti gli altri = 0
Controlbyte 1 = 00010000Controlbyte 2 = 00001000tutti gli altri = 00000000
1680
L’attuatore deve muoversi in dire-zione positiva portandosi nel fine-corsa (posizione 2)
POS2 = 1tutti gli altri = 0
Controlbyte 1 = 00000010Controlbyte 2 = 00000000tutti gli altri = 00000000
200
1) L’occupazione dei dati di uscita del modulo è riportata nel par. 5.3.2) Poiché i segnali vengono settati contemporaneamente, l’asse è in genere ancora in movimento
quando viene attivato il freno. Assicurarsi che il freno utilizzato sia adatto allo scopo.
Tab. 5/2: Esempi di parametrizzazioni Fail Safe e Idle Mode
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.1.5 Parametrizzazione del terminale CPX in caso di riavvio
La parametrizzazione del terminale CPX prevista durantel’avviamento iniziale o in seguito a interruzioni nel Fieldbusdovrebbe essere effettuata attraverso il modulo di connes-sione o lo scanner/master bus, a condizione che tali proce-dure siano previste dal protocollo Fieldbus utilizzato. Ciòconsente di assicurare che, in seguito alla sostituzione di unterminale CPX, anche il nuovo terminale funzioni con le stesseimpostazioni dei parametri.
Con il parametro “start del sistema” (vedi descrizione delsistema CPX, par. B.2.2.) è possibile influire sul comporta-mento di avviamento.
Attenersi alle indicazioni per la sostituzione di componentifornite nel par. A.3.
Start del sistema con parametrizzazione Default
Si raccomanda di selezionare l’opzione “start del sistema conparametrazione default e struttura CPX corrente”. La parame-trizzazione prevista può quindi essere impostata durantel’avviamento iniziale o in seguito a interruzioni nel fieldbusad es. attraverso il modulo di connessione o lo scanner/ma-ster bus (a seconda del fieldbus utilizzato).
AttenzioneCon l’opzione “start del sistema con parametrazionedefault” è indispensabile, che i parametri modificati delCMPX nella parametrizzazione di avviamento siano ese-guiti nel master Fieldbus o nel comando principale!
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Start del sistema con parametrizzazione memorizzata
Se all’avviamento del sistema il LED M del master CPX emanaluce fissa, ciò significa che è impostata l’opzione “start delsistema con parametrazione e struttura CPX memorizzate”.
AttenzioneNella maggior parte dei moduli CPX, quando viene sosti-tuito un modulo, con “Start del sistema con parametra-zione memorizzata” viene automaticamente realizzata laparametrizzazione memorizzata nel terminale CPX.
In caso di sostituzione di un CMPX questo non avviene,vedi par. 5.1.2). In questo caso si deve assolutamente ef-fettuare la parametrizzazione corretta come è avvenuto nelcorso della prima messa in funzione.
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-9Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.2 Messa in funzione mediante il master CPX
La messa in funzione mediante il master CPX prevedei seguenti passi operativi:
1. Se non è già stato eseguito:Controllare la struttura del sistema Soft Stop con i compo-nenti utilizzati sulla linea assi (vedi par. 4.2.1).
2. Controllare l’alimentazione di tensione del terminale CPX,inserire l’alimentazione di tensione (vedi par. 4.2.2).
NotaLasciare l’alimentazione dell’aria compressa inizialmentedisinserita. In tal modo si impediscono movimenti acciden-tali degli attuatori collegati.
3. Configurare il nodo bus CPX oppure il CPX-FEC (vedipar. 5.1.3).
4. Impostare i parametri del CMPX:
– Mediante il software di configurazione oppure la para-metrizzazione all’avviamento: vedi appendice B.
– Mediante i dati I/O: vedi par. 5.3 e 5.4.
5. Inserire l’alimentazione dell’aria compressa.
6. Eseguire una procedura di teach-in, vedi par. 5.6.5
7. Se necessario, rilevare le posizioni intermedie medianteteach-in, vedi par. 5.6.6.
Dopo la messa in funzione del sistema Soft Stop
8. Controllare l’unità di comando del sistema Soft Stop conCMPX (vedi par. 5.6).
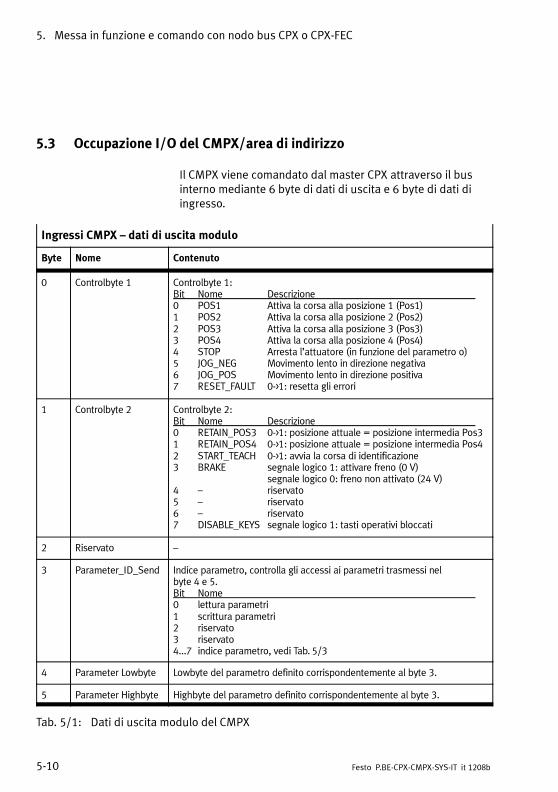
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-10 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.3 Occupazione I/O del CMPX/area di indirizzo
Il CMPX viene comandato dal master CPX attraverso il businterno mediante 6 byte di dati di uscita e 6 byte di dati diingresso.
Ingressi CMPX – dati di uscita modulo
Byte Nome Contenuto
0 Controlbyte 1 Controlbyte 1:Bit Nome Descrizione0 POS1 Attiva la corsa alla posizione 1 (Pos1)1 POS2 Attiva la corsa alla posizione 2 (Pos2)2 POS3 Attiva la corsa alla posizione 3 (Pos3)3 POS4 Attiva la corsa alla posizione 4 (Pos4)4 STOP Arresta l’attuatore (in funzione del parametro o)5 JOG_NEG Movimento lento in direzione negativa6 JOG_POS Movimento lento in direzione positiva7 RESET_FAULT 0->1: resetta gli errori
1 Controlbyte 2 Controlbyte 2:Bit Nome Descrizione0 RETAIN_POS3 0->1: posizione attuale = posizione intermedia Pos31 RETAIN_POS4 0->1: posizione attuale = posizione intermedia Pos42 START_TEACH 0->1: avvia la corsa di identificazione3 BRAKE segnale logico 1: attivare freno (0 V)
segnale logico 0: freno non attivato (24 V)4 – riservato5 – riservato6 – riservato7 DISABLE_KEYS segnale logico 1: tasti operativi bloccati
2 Riservato –
3 Parameter_ID_Send Indice parametro, controlla gli accessi ai parametri trasmessi nelbyte 4 e 5.Bit Nome0 lettura parametri1 scrittura parametri2 riservato3 riservato4...7 indice parametro, vedi Tab. 5/3
4 Parameter Lowbyte Lowbyte del parametro definito corrispondentemente al byte 3.
5 Parameter Highbyte Highbyte del parametro definito corrispondentemente al byte 3.
Tab. 5/1: Dati di uscita modulo del CMPX

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-11Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Uscite CMPX – dati di ingresso modulo
Byte Nome Contenuto
0 Statusbyte 1 Statusbyte 1:Bit Nome Descrizione0 MC_POS1 segnale di conferma posizione 1 (Pos1) raggiunta1 MC_POS2 segnale di conferma posizione 2 (Pos2) raggiunta2 MC_POS3 segnale di conferma posizione 3 (Pos3) raggiunta3 MC_POS4 segnale di conferma posizione 4 (Pos4) raggiunta4 ACK_STOP segnale di conferma Stop5 READY pronto per istruzione di posizionamento6 FAULT è presente un errore7 TEACH_ACTIVE procedura di teach-in in corso
1 Statusbyte 2 Statusbyte 2:Bit Nome Descrizione0 – riservato1 – riservato2 – riservato3 STATUS_BRAKE segnale di conferma freno:
1: freno attivato0: freno non attivato
4 STATUS_AIR segnale di conferma aria compressa(vedi par. 5.6.2):1: somma pressione camera valvola ≥ valore limite0: somma pressione camera valvola < valore limite
5 LOADVOLTAGE tensione di carico presente = 16 – riservato7 REF_DONE corsa di riferimento eseguita = 1 (solo DNCI)
2 Statusbyte 3 Numero di errore del CMPX, ved par. 6.2.3, Tab. 6/2.
3 Parameter_ID_Receive
Segnale di conferma del parametro, comunica lo stato dell’accesso alparametro.Bit Nome0 parametro trasmesso / valido1 istruzione parametro non eseguibile 1)
2 riservato3 riservato4...7 indice parametro, vedi Tab. 5/3
4 Parameter Lowbyte Lowbyte del parametro trasmesso / letto.
5 Parameter Highbyte Highbyte del parametro trasmesso / letto.
1) Quando non è possibile eseguire l’istruzione del parametro nei byte 4 e 5 viene trasmesso invece delvalore del parametro un numero di errore del parametro, vedi Tab. 5/4. Il CMPX non passa allo stato dierrore se l’accesso al parametro non riesce.
Tab. 5/2: Dati di ingresso modulo del CMPX

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-12 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice del parametro (bit 4 ... 7 di Parameter_ID_Send)
Valore Descrizione
0 Posizione reale (solo lettura)
1 A Accelerazione
2 C Decelerazione
3 S Parametro del sistema
4 L Lunghezza (agisce solo nei sistemi di misura incrementali digitali) [1 inc = 1 mm]
5 r Punto di riferimento (agisce solo nei sistemi di misura incrementali digitali) [1 inc = 1 mm]
6 o Parametro opzioni
7 Posizione 1 (solo lettura) [1 inc = 0,1 mm]
8 Posizione 2 (solo lettura) [1 inc = 0,1 mm]
9 Posizione 3 [1 inc = 0,1 mm]
10 Posizione 4 [1 inc = 0,1 mm]
11 Tipo di sistema di misura (solo lettura)
12 Tipo di valvola (solo lettura)
13 ... 15 Riservato
Tab. 5/3: Parameter_ID_Send
Errore Accesso al parametro non eseguibile, perché
1 Indice non ammesso (parametro non definito)
2 Valore limite superato
3 Valore non modificabile
4 Lo stato di esercizio impedisce l’esecuzionedell’istruzione
5 Bit 0 e 1 di Parameter_ID_Send (lettura e scrittura) sonoimpostati contemporaneamente.
Tab. 5/4: Numeri di errore parametro

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-13Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Trattamento dei segnali in Controlbyte 1 e 2
Nome delsegnale
Con azionamento afronte
Con azionamentoa livello
Univocità 1) Agiscesempre 2)
POS1 x x
POS2 x x
POS3 x x
POS4 x x
STOP x x
JOG_NEG x x 3) x
JOG_POS x x 3) x
RESET_FAULT x In stato di errore
RETAIN_POS3 1) x x
RETAIN_POS4 1) x x
START_TEACH x x
BRAKE x x x
DISABLE_KEYS x x
1) Univocità: scatta solo quando non è presente nessun altro segnale di ingresso (segnale ditraslazione). RETAIN_POS3 / RETAIN_POS4 possono essere azionati anchequando è attivo JOG_NEG oppure JOG_POS. In questo caso il movimento vieneinterrotto e viene acquisita la posizione.Procedere solo con un nuovo fronte Low-High di JOG_NEG/JOG_POS.
2) Agisce sempre: sempre attivo, indipendentemente dallo stato di esercizio e dal livello di altrisegnali di ingresso.
3) JOG_POS/NEG: il movimento viene avviato con un fronte positivo. L’attuatore trasla finché è pre-sente un segnale logico 1. In presenza di un segnale logico 0 l’attuatore vienearrestato.
Tab. 5/5: Panoramica del trattamento dei segnali di uscita
Se un’operazione, ad es. la traslazione per l’apprendimentodi una posizione intermedia, è stato avviata con i tasti, deveanche essere conclusa con i tasti. Tutti i segnali di uscita delnodo bus CPX o nel CPX-FEC (ad eccezione di “STOP” che èsempre attivo) rimangono bloccati.Questo garantisce l’univocità del comando.
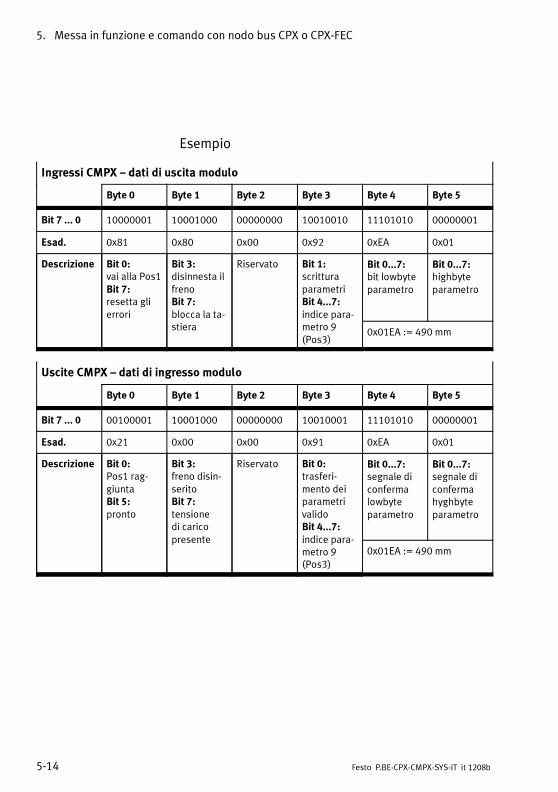
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-14 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Esempio
Ingressi CMPX – dati di uscita modulo
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5
Bit 7 ... 0 10000001 10001000 00000000 10010010 11101010 00000001
Esad. 0x81 0x80 0x00 0x92 0xEA 0x01
Descrizione Bit 0:vai alla Pos1Bit 7:resetta glierrori
Bit 3:disinnesta ilfrenoBit 7:blocca la ta-stiera
Riservato Bit 1:scritturaparametriBit 4...7:indice para-metro 9(Pos3)
Bit 0...7:bit lowbyteparametro
Bit 0...7:highbyteparametro
0x01EA := 490 mm
Uscite CMPX – dati di ingresso modulo
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5
Bit 7 ... 0 00100001 10001000 00000000 10010001 11101010 00000001
Esad. 0x21 0x00 0x00 0x91 0xEA 0x01
Descrizione Bit 0:Pos1 rag-giuntaBit 5:pronto
Bit 3:freno disin-seritoBit 7:tensionedi caricopresente
Riservato Bit 0:trasferi-mento deiparametrivalidoBit 4...7:indice para-metro 9(Pos3)
Bit 0...7:segnale diconfermalowbyteparametro
Bit 0...7:segnale diconfermahyghbyteparametro
0x01EA := 490 mm
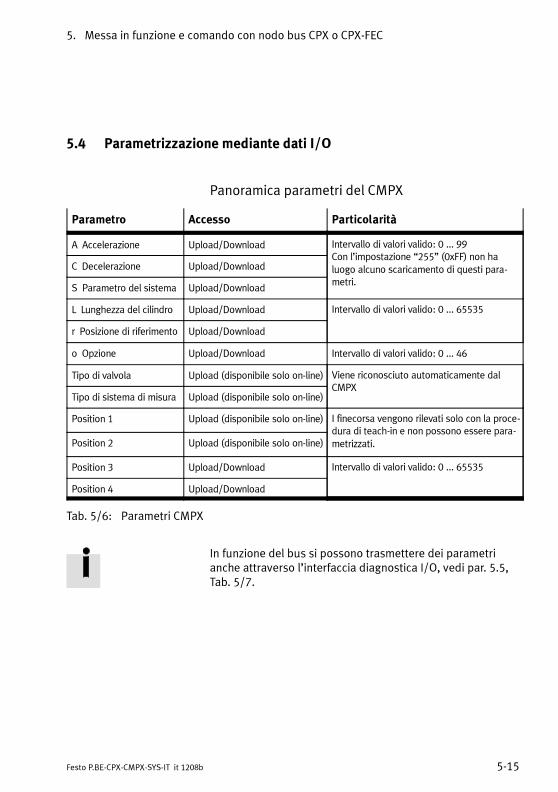
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-15Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.4 Parametrizzazione mediante dati I/O
Panoramica parametri del CMPX
Parametro Accesso Particolarità
A Accelerazione Upload/Download Intervallo di valori valido: 0 ... 99Con l’impostazione “255” (0xFF) non haluogo alcuno scaricamento di questi para-metri.
C Decelerazione Upload/Download
S Parametro del sistema Upload/Download
L Lunghezza del cilindro Upload/Download Intervallo di valori valido: 0 ... 65535
r Posizione di riferimento Upload/Download
o Opzione Upload/Download Intervallo di valori valido: 0 ... 46
Tipo di valvola Upload (disponibile solo on-line) Viene riconosciuto automaticamente dalCMPX
Tipo di sistema di misura Upload (disponibile solo on-line)
Position 1 Upload (disponibile solo on-line) I finecorsa vengono rilevati solo con la proce-dura di teach-in e non possono essere para-metrizzati.Position 2 Upload (disponibile solo on-line)
Position 3 Upload/Download Intervallo di valori valido: 0 ... 65535
Position 4 Upload/Download
Tab. 5/6: Parametri CMPX
In funzione del bus si possono trasmettere dei parametrianche attraverso l’interfaccia diagnostica I/O, vedi par. 5.5,Tab. 5/7.
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-16 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Regole per la parametrizzazione
– “Scrittura parametri” presenta l’azionamento a fronte.Il nuovo parametro viene accettato con il fronte.“Lettura parametri” presenta l’azionamento a livello.Il valore viene aggiornato ciclicamente, finché è presenteil segnale logico “1” (ad es. per la lettura della posizionereale).
– I parametri A, C, S, L, r, o sono scrivibili, se il controllernon si trova nello stato “Identificazione” (procedura diteach-in), corsa di riferimento oppure in esercizio Jog(“traslazione manuale”, Jog_neg, Jog_pos).
Nello stato “Identificazione” viene impostato nel byte“Parameter_ID_Receive” il bit B1 “istruzione parametronon eseguibile”.
– I parametri Pos3 / Pos4 possono essere scritti sempre(anche durante il movimento dell’attuatore), tranne chedurante l’esercizio Jog (traslazione “manuale”, JOG_NEG,JOG_POS).
– In caso di scrittura della posizione 3/4 mediante ilFieldbus viene salvato nel modulo CMPX (ritentivo)solo il primo valore trasmesso dopo l’inserimento.Tutti i valori trasmessi successivamente dal nodo busCPX o da CPX-FEC per le posizioni 3 e 4 sono subitoattivi, ma non vengono salvati nella memoria ritentiva.Dopo un disinserimento e un reinserimento dell’alimenta-zione di tensione vengono ripristinati gli ultimi valori me-morizzati in locazione ritentiva.
NotaPer la parametrizzazione attenersi alle indicazioni riportatenel par. 5.1.2.
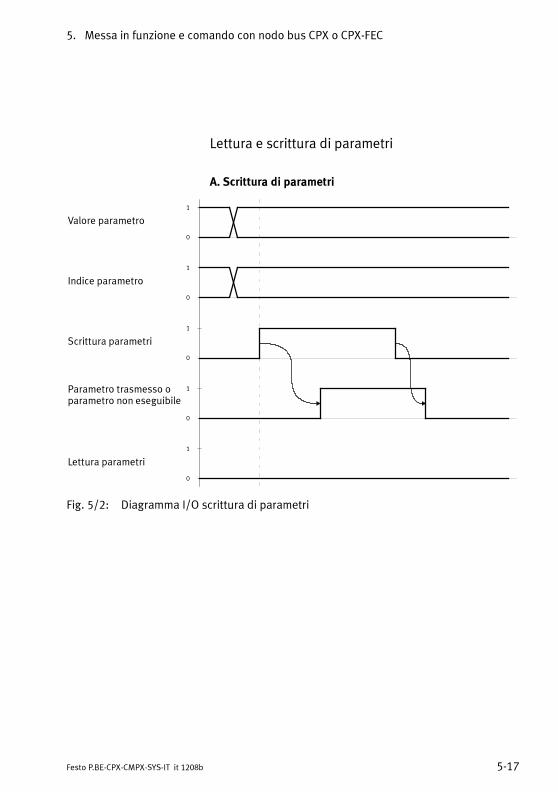
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-17Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Lettura e scrittura di parametri
A. Scrittura di parametri
Valore parametro1
0
1
0
1
0
Indice parametro1
0
Scrittura parametri
Parametro trasmesso oparametro non eseguibile
1
0
Lettura parametri
Fig. 5/2: Diagramma I/O scrittura di parametri

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-18 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B. Lettura di parametri
Valore parametro1
0
1
0
1
0
Indice parametro1
0
Scrittura parametri
Parametro trasmesso oparametro non eseguibile
1
0
Lettura parametri
Fig. 5/3: Diagramma I/O lettura di parametri
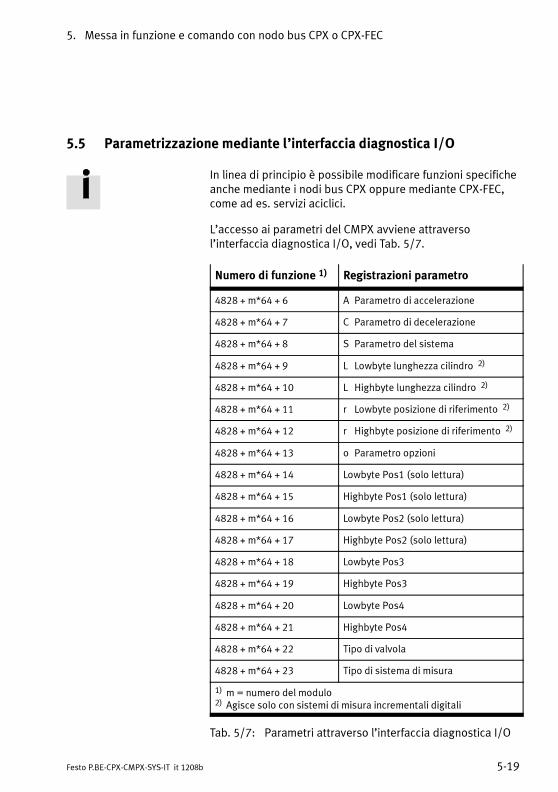
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-19Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.5 Parametrizzazione mediante l’interfaccia diagnostica I/O
In linea di principio è possibile modificare funzioni specificheanche mediante i nodi bus CPX oppure mediante CPX-FEC,come ad es. servizi aciclici.
L’accesso ai parametri del CMPX avviene attraversol’interfaccia diagnostica I/O, vedi Tab. 5/7.
Numero di funzione 1) Registrazioni parametro
4828 + m*64 + 6 A Parametro di accelerazione
4828 + m*64 + 7 C Parametro di decelerazione
4828 + m*64 + 8 S Parametro del sistema
4828 + m*64 + 9 L Lowbyte lunghezza cilindro 2)
4828 + m*64 + 10 L Highbyte lunghezza cilindro 2)
4828 + m*64 + 11 r Lowbyte posizione di riferimento 2)
4828 + m*64 + 12 r Highbyte posizione di riferimento 2)
4828 + m*64 + 13 o Parametro opzioni
4828 + m*64 + 14 Lowbyte Pos1 (solo lettura)
4828 + m*64 + 15 Highbyte Pos1 (solo lettura)
4828 + m*64 + 16 Lowbyte Pos2 (solo lettura)
4828 + m*64 + 17 Highbyte Pos2 (solo lettura)
4828 + m*64 + 18 Lowbyte Pos3
4828 + m*64 + 19 Highbyte Pos3
4828 + m*64 + 20 Lowbyte Pos4
4828 + m*64 + 21 Highbyte Pos4
4828 + m*64 + 22 Tipo di valvola
4828 + m*64 + 23 Tipo di sistema di misura
1) m= numero del modulo2) Agisce solo con sistemi di misura incrementali digitali
Tab. 5/7: Parametri attraverso l’interfaccia diagnostica I/O
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-20 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.6 Comando del CMPX
AvvertenzaDurante la messa in funzione e il funzionamento, il caricopuò muoversi alla massima velocità e accelerazione. Assi-curarsi che:
– sia possibile accedere all’area di traslazione della massaspostata solo se il sistema è stato depressurizzato,
– l’intera area di traslazione sia libera da contorni di di-sturbo.
5.6.1 Caratteristiche di inserimento
1. La tensione d’esercizio e la tensione di carico esternavengono inserite contemporaneamente.
2. READY viene attivato quando la fase di avviamento a regimedel CMPX e del CPX è conclusa. Se è presente un errore,questo viene visualizzato e READY non viene attivato.
3. Lo scambio dei dati con il PLC è possibile solo in seguitoalla conclusione della fase di avviamento a regime del PLCe all’emissione del primo segnale di READY da parte delCMPX o alla segnalazione di un errore da parte del CMPX.
4. Si consiglia di inserire l’alimentazione dell’aria compressasolo dopo l’emissione del segnale di READY.
5. L’uscita del freno sulla valvola rimane attiva (=0) finoall’emissione del segnale di READY e viene modificatacon la prima istruzione di traslazione dell’uscita delfreno corrispondentemente al bit del freno BRAKE.
6. Se l’asse si trova nell’area di tolleranza della posizione1 o 2, è attivato STATUS_AIR e non è attivato STOP, vieneavviato il regolatore e spinto l’asse nella posizione corri-spondente (posizione 1 o 2).
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-21Festo P.BE-CPX-CMPX-SYS-IT it 1208b
7. Se non si è verificato alcun errore la posizione reale vieneacquisita come posizione nominale e l’asse si trova nellaposizione attuale con la regolazione attivata.
Nel caso di DNCI valgono le seguenti eccezioni:È sempre necessaria una prima istruzione di traslazione(corsa di riferimento alla posizione 1 o 2) affinché l’asse passiad un esercizio regolato. Il segnale di stop non agisce comeprima istruzione di traslazione.
5.6.2 Funzione base del controllo della pressione
Con i sensori di pressione della VPWP viene tenuta sotto con-trollo la pressione. Tale monitoraggio viene attivato gradual-mente dopo l’inserimento con il segnale di READY. Si attuanole seguenti differenziazioni del caso:
– Con il segnale Ready vengono monitorate le pressioninelle camere della VPWP e segnalate come STATUS_AIR(byte di stato 2, bit 4). Fintanto che la somma delle pres-sioni < 2,4 bar, Status_Air = 0.Se la somma delle pressioni > 2,4 bar, viene postoSTATUS_AIR = 1. STATUS_AIR ha una funzione di co-mando al momento dell’inserimento, vedi par. 5.6.1.
– Controllare se la pressione d’esercizio < 1,2 bar (errore E.50).L’errore E.50 viene emesso quando in entrambe le camereviene misurata contemporaneamente una pressione< 1,2 bar.Durante la fase di formazione della pressione all’accensionel’errore E.50 non viene emesso, a meno che la prima istru-zione di traslazione non sia già stata avviata.
– Durante l’identificazione (corsa di “teach-in”) ha luogo uncontrollo costante della presenza dell’errore E.50 o E.56.
– Se la corsa di “teach-in” è riuscita, durante un’istruzionedi traslazione (corsa di riferimento, posizione 1 ... posi-zione 4, attivazione o annullamento di Stop, programma-zione mediante “teach-in” della posizione 3 o 4) non haluogo il monitoraggio dell’errore E.56.
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-22 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.6.3 Regolazione della posizione o della pressione non attiva
Nei seguenti stati non ha luogo alcuna regolazione della posi-zione o della pressione:
– Con tutti gli errori tranne che con il gruppo di errori 2x,
– Dopo la conferma di un errore tranne che con il gruppodi errori 2x,
– All’accensione, quando non è disponibile l’aria compressa(< 2,4 bar),
– All’accensione, quando l’asse non ha eseguito alcunacorsa di identificazione,
– All’accensione, quando non è ancora stato definito alcunriferimento per l’asse (solo per il sistema di misura incre-mentale digitale, ad es. DNCI),
– Quando è necessaria una nuova programmazione me-diante “teach-in” (identificazione) a causa di una modificadi parametri.
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-23Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.6.4 Trattamento dell’uscita della valvola “Freno”
Il freno può essere attivato o disattivato solo mediante BRAKE(Controlbyte 2, bit 3). Il CMPX non inserisce né disinseriscemai automaticamente il freno.
In questo campo si opera una distinzione tra stato senza er-rori e determinati stati di errore.
Stato senza errori
Attivazione del freno
A: il regolatore è attivato e l’asse è regolato:con l’attivazione di BRAKE l’uscita di commutazione sullavalvola viene riportata immediatamente a 0 V (il freno èattivo immediatamente).
B: il regolatore è attivato e l’asse esegue ancora un’istru-zione di traslazione; in altri termini esso si muove e nonè presente alcun’unità di frenatura/unità di serraggio:con l’attivazione di BRAKE l’uscita di commutazione sullavalvola viene riportata a 0 V. Il CMPX avvia immediata-mente una rampa di decelerazione.
NotaAssicurarsi che l’unità di frenatura/unità di serraggio am-mettano questo stato di esercizio.
C: il regolatore non è attivo:con l’attivazione di BRAKE l’uscita di commutazione sullavalvola viene riportata a 0 V (il freno è attivo immediata-mente). Il regolatore non cambia stato.
Se è attivato BRAKE e viene definita un’istruzione per il movi-mento dell’asse (ammesso che non ci siano errori), l’imposta-zione non si attiva, ma viene emesso il segnale di errore E.18“unità di serraggio ancora attivata, istruzione di traslazioneimpossibile”.

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-24 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Disattivazione del freno
a: il regolatore è attivato, l’asse si trova nello stato A (vedi“Attivazione del freno”), la posizione attuale si trova nelcampo di tolleranza ricavato internamente:dopo un intervallo di smorzamento di circa 1 s il frenoviene disattivato.
c: il regolatore non è attivo:con il reset di BRAKE l’uscita di commutazione sulla val-vola viene riportata immediatamente a 24 V (il freno vieneimmediatamente disattivato).
Avvertenza: Con l’impostazione di STOP è possibile portarel’asse da uno stato non regolato a uno stato regolato e ilsuccessivo disinserimento del freno avviene soltanto con unmovimento minimo dell’asse.
STATUS_BRAKE (bit 4 nel byte di stato 2) manda un segnaledi conferma dello stato dell’uscita del freno.
Anomalia della comunicazione con il sistema(Sono attivi gli errori 43, 60, 69, 71, 80, 89)
In questi casi è possibile disinserire l’alimentazione della ten-sione di carico della VPWP attivando BRAKE.
Dopo la conferma dell’errore la tensione di carico viene rein-serita.

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-25Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.6.5 Procedura di teach-in
Presupposto L’attuatore deve essere pronto per il funzionamento. Sulleuscite POS1 ... POS4 deve essere posto un segnale logico 0.Sul CPX-MMI non deve essere attivo il Force_Mode.
Un fronte positivo all’uscita START_TEACH permette diavviare la procedura di teach-in.Mentre la procedura di teach-in è in corso l’ingressoTEACH_ACTIVE fornisce il segnale logico 1, l’uscita READY ilsegnale logico 0.
La procedura di teach-in può essere sospesa in qualsiasimomento con un fronte positivo all’uscita STOP.
Alla conclusione della procedura di teach-in l’ingressoTEACH_ACTIVE porta il segnale logico 0, l’uscita READY ilsegnale logico 1.

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-26 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.6.6 Traslazione manuale e programmazione mediante “teach-in” delleposizioni intermedie
Presupposto L’attuatore deve essere pronto per il funzionamento. Sulleuscite POS1 ... POS4 deve essere posto un segnale logico 0.Sul CPX-MMI non deve essere attivo il Force_Mode.
Con le uscite JOG_NEG e JOG_POS la massa spostata puòessere traslata “manualmente”.
Uscita Descrizione
JOG_NEG Riduzione del valore della posizione (la massa si avvi-cina lentamente allo zero del sistema di misura)
JOG_POS Aumento del valore della posizione (la massa si allon-tana lentamente dallo zero del sistema di misura)
Per traslare la massa manualmente:
• Attivare l’uscita corrispondente (JOG_NEG o JOG_POS),fintanto che la massa deve essere traslata (è necessarioil fronte positivo all’avviamento).
• Azzerare l’uscita per arrestare la massa.
La posizione attuale può essere memorizzata con unfronte positivo ad una delle uscite RETAIN_POS3 oppureRETAIN_POS4 come posizione intermedia (vedi par. 4.4.5).
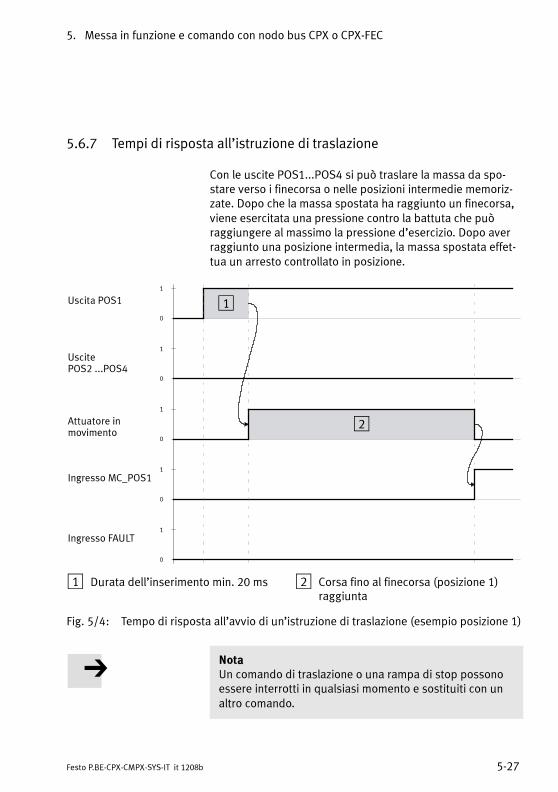
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-27Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.6.7 Tempi di risposta all’istruzione di traslazione
Con le uscite POS1...POS4 si può traslare la massa da spo-stare verso i finecorsa o nelle posizioni intermedie memoriz-zate. Dopo che la massa spostata ha raggiunto un finecorsa,viene esercitata una pressione contro la battuta che puòraggiungere al massimo la pressione d’esercizio. Dopo averraggiunto una posizione intermedia, la massa spostata effet-tua un arresto controllato in posizione.
Ingresso MC_POS11
0
Ingresso FAULT1
0
1
0
1
0
1
0
Uscita POS1
UscitePOS2 ...POS4
Attuatore inmovimento
1
2
1 Durata dell’inserimento min. 20 ms 2 Corsa fino al finecorsa (posizione 1)raggiunta
Fig. 5/4: Tempo di risposta all’avvio di un’istruzione di traslazione (esempio posizione 1)
NotaUn comando di traslazione o una rampa di stop possonoessere interrotti in qualsiasi momento e sostituiti con unaltro comando.

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-28 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.6.8 Diagrammi di flusso dei segnali d’uscita
Caso 1: Start/Stop attuatore
POS1
l’attuatore si ferma
1
0
STOP1
0
l’attuatore si muove(nuovo fronte)
l’attuatore si ferma
Caso 2: Stop in caso di errore/conferma errore
POS1
Reset errori
1
0
RESET_FAULT1
0
l’attuatore si muove(nuovo fronte)
un errore è presente
l’attuatore si ferma
Caso 3: Errore dovuto a più istruzioni contemporanee
POS1
Errore record di posizionamento E.20:“Nessuna istruzione univoca”
1
0
POS21
0
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-29Festo P.BE-CPX-CMPX-SYS-IT it 1208b
5.7 Uso della posizione intermedia appresa come punto di riferimentoper i sensori
Le posizioni intermedie apprese trovano applicazione anchecome punti di riferimento per i sensori, poiché l’ingresso cor-rispondente (MC_POS3, MC_POS4) porta il segnale logico 1per 50 ms al superamento delle posizioni intermedie.
NotaPer gestire il CMPX direttamente con il “segnale dei sen-sori”, tenere presente quanto segue:
– La distanza fra la posizione intermedia rilevata e il fine-corsa meccanico deve essere sufficientemente grandeperché la procedura di frenata viene avviata solo dopol’identificazione del segnale.
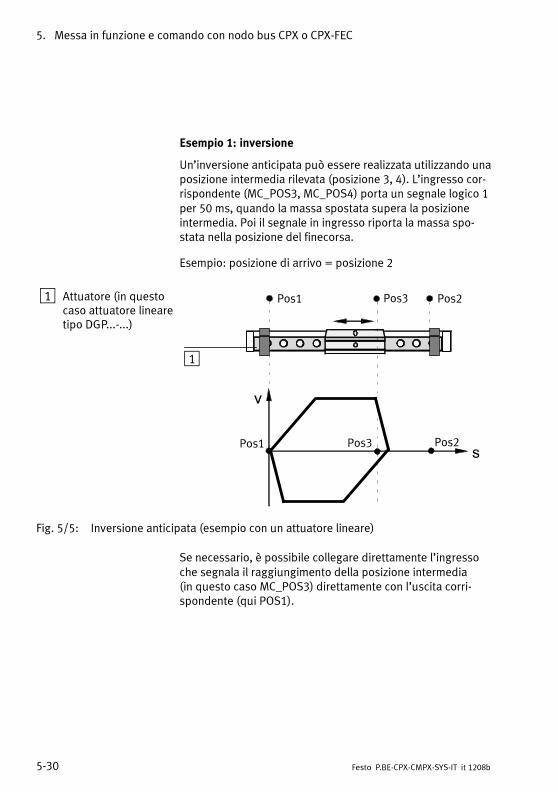
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-30 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Esempio 1: inversione
Un’inversione anticipata può essere realizzata utilizzando unaposizione intermedia rilevata (posizione 3, 4). L’ingresso cor-rispondente (MC_POS3, MC_POS4) porta un segnale logico 1per 50 ms, quando la massa spostata supera la posizioneintermedia. Poi il segnale in ingresso riporta la massa spo-stata nella posizione del finecorsa.
Esempio: posizione di arrivo = posizione 2
1 Attuatore (in questocaso attuatore linearetipo DGP...-...)
1
Pos1 Pos3 Pos2
Pos1 Pos3 Pos2
Fig. 5/5: Inversione anticipata (esempio con un attuatore lineare)
Se necessario, è possibile collegare direttamente l’ingressoche segnala il raggiungimento della posizione intermedia(in questo caso MC_POS3) direttamente con l’uscita corri-spondente (qui POS1).
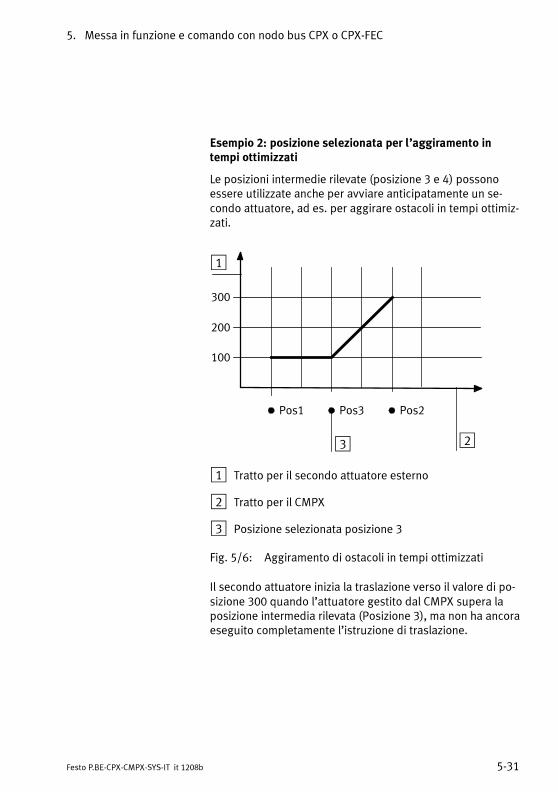
5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-31Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Esempio 2: posizione selezionata per l’aggiramento intempi ottimizzati
Le posizioni intermedie rilevate (posizione 3 e 4) possonoessere utilizzate anche per avviare anticipatamente un se-condo attuatore, ad es. per aggirare ostacoli in tempi ottimiz-zati.
100
200
300
1
23
Pos1 Pos2Pos3
1 Tratto per il secondo attuatore esterno
2 Tratto per il CMPX
3 Posizione selezionata posizione 3
Fig. 5/6: Aggiramento di ostacoli in tempi ottimizzati
Il secondo attuatore inizia la traslazione verso il valore di po-sizione 300 quando l’attuatore gestito dal CMPX supera laposizione intermedia rilevata (Posizione 3), ma non ha ancoraeseguito completamente l’istruzione di traslazione.

5. Messa in funzione e comando con nodo bus CPX o CPX-FEC
5-32 Festo P.BE-CPX-CMPX-SYS-IT it 1208b

Diagnosi, trattamento degli errori e ottimizzazione
6-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Capitolo 6
Diagnosi, trattamento degli errori e ottimizzazione

6. Diagnosi, trattamento degli errori e ottimizzazione
6-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
6.1 Panoramica delle possibilità diagnostiche 6-3. . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Errori del CMPX 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Reazione in caso d’errore 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.2 Reset di errori 6-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.3 Numeri di errore del CMPX 6-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Diagnosi tramite LED 6-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Stato di esercizio normale 6-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 LED specifici di CMPX 6-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.3 LED sulla VPWP 6-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.4 LED sull’interfaccia sensori 6-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.5 LED sul sistema di misura (solo DGCI) 6-17. . . . . . . . . . . . . . . . . . . . . . .
6.4 Diagnosi mediante display/display a 7 segmenti 6-18. . . . . . . . . . . . . . . . . . . . .
6.4.1 Versione del firmware 6-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.2 Indicatore di stato 6-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Funzioni diagnostiche con l’handheld 6-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.1 Indicazione di errore e reset dell’errore (menu [Diagnostics] ) 6-20. . . .
6.5.2 Informazioni sul CMPX (menu [Module Data] ) 6-21. . . . . . . . . . . . . . . .
6.6 Diagnosi attraverso il nodo bus CPX o il CPX-FEC 6-22. . . . . . . . . . . . . . . . . . . . .
6.6.1 Dati di ingresso e di uscita dei moduli 6-22. . . . . . . . . . . . . . . . . . . . . . .
6.6.2 Bit di stato del terminale CPX 6-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.3 Interfaccia diagnostica I/O e memoria di diagnosi 6-24. . . . . . . . . . . . .
6.7 Eliminazione dei guasti del sistema 6-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.1 Anomalie di funzionamento 6-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.8 Ottimizzazione 6-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.8.1 Ottimizzazione del posizionamento 6-29. . . . . . . . . . . . . . . . . . . . . . . . .
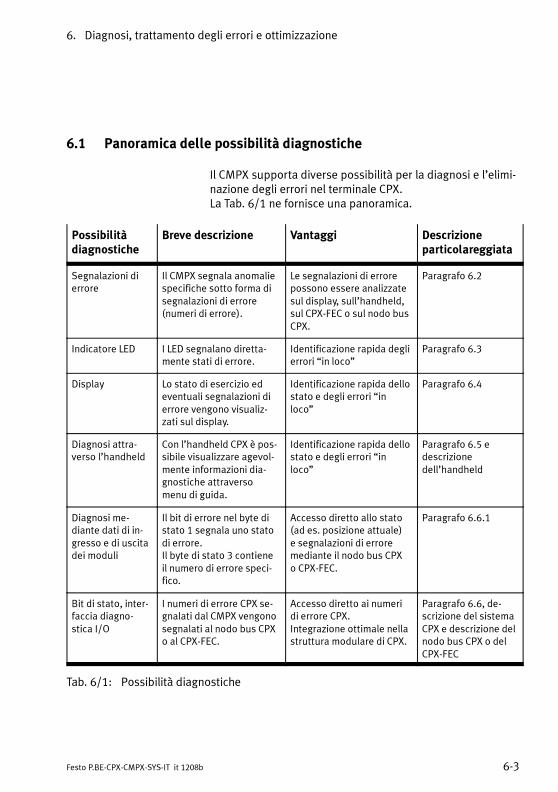
6. Diagnosi, trattamento degli errori e ottimizzazione
6-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.1 Panoramica delle possibilità diagnostiche
Il CMPX supporta diverse possibilità per la diagnosi e l’elimi-nazione degli errori nel terminale CPX.La Tab. 6/1 ne fornisce una panoramica.
Possibilitàdiagnostiche
Breve descrizione Vantaggi Descrizioneparticolareggiata
Segnalazioni dierrore
Il CMPX segnala anomaliespecifiche sotto forma disegnalazioni di errore(numeri di errore).
Le segnalazioni di errorepossono essere analizzatesul display, sull’handheld,sul CPX-FEC o sul nodo busCPX.
Paragrafo 6.2
Indicatore LED I LED segnalano diretta-mente stati di errore.
Identificazione rapida deglierrori “in loco”
Paragrafo 6.3
Display Lo stato di esercizio edeventuali segnalazioni dierrore vengono visualiz-zati sul display.
Identificazione rapida dellostato e degli errori “inloco”
Paragrafo 6.4
Diagnosi attra-verso l’handheld
Con l’handheld CPX è pos-sibile visualizzare agevol-mente informazioni dia-gnostiche attraversomenu di guida.
Identificazione rapida dellostato e degli errori “inloco”
Paragrafo 6.5 edescrizionedell’handheld
Diagnosi me-diante dati di in-gresso e di uscitadei moduli
Il bit di errore nel byte distato 1 segnala uno statodi errore.Il byte di stato 3 contieneil numero di errore speci-fico.
Accesso diretto allo stato(ad es. posizione attuale)e segnalazioni di erroremediante il nodo bus CPXo CPX-FEC.
Paragrafo 6.6.1
Bit di stato, inter-faccia diagno-stica I/O
I numeri di errore CPX se-gnalati dal CMPX vengonosegnalati al nodo bus CPXo al CPX-FEC.
Accesso diretto ai numeridi errore CPX.Integrazione ottimale nellastruttura modulare di CPX.
Paragrafo 6.6, de-scrizione del sistemaCPX e descrizione delnodo bus CPX o delCPX-FEC
Tab. 6/1: Possibilità diagnostiche
6. Diagnosi, trattamento degli errori e ottimizzazione
6-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.2 Errori del CMPX
Il CMPX supporta un trattamento e una valutazione deglierrori dettagliata.Per una lista degli errori si rimanda al paragrafo 6.2.3,Tab. 6/2.
6.2.1 Reazione in caso d’errore
Se si verifica un errore, il CMPX visualizza un numero dierrore e poi reagisce nel modo seguente:
– l’attuatore è sotto controllo o non sotto controllo aseconda della classe di errore,
– l’ingresso Fault porta il segnale logico 1,
– l’ingresso Ready porta il segnale logico 0,
– non vengono più accettate istruzioni di traslazione,
– l’uscita del freno non viene influenzata.
A seconda dell’errore si verifica la seguente reazione:
Errore record di posizionamento (gruppo di errori 20)
– il regolatore non viene disinserito, quindi l’attuatore ri-mane sotto controllo. L’alimentazione della tensione dicarico per la valvola non viene interrotta.Se l’attuatore si muove quando si verifica l’errore, vienefermato mediante una rampa di decelerazione.
– dopo la conferma di riconoscimento errore l’attuatore siferma sotto controllo nella posizione attuale.
6. Diagnosi, trattamento degli errori e ottimizzazione
6-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Tutti gli altri errori (gruppi di errore 10 e 30 ... 80)
– il regolatore viene disattivato (spola della valvola in posi-zione centrale elettrica – flusso bloccato). L’alimentazionedella tensione di carico non viene interrotta.
– dopo la conferma di riconoscimento errore l’attuatorerimane non regolato.
– in caso di errori di comunicazione è possibile che la val-vola non possa più essere interrogata. Anche in questocaso la tensione di carico non viene interrotta. Trascorso iltempo di timeout, la valvola torna automaticamente nellaposizione centrale meccanica. In fase di inizializzazionedella valvola dopo l’attivazione dell’alimentazione vienerispettato un intervallo di timeout di 5 ms.
6.2.2 Reset di errori
È possibile resettare gli errori dopo l’eliminazione della lorocausa.
Per eliminare l’errore:
– resettare l’errore con l’uscita RESET_FAULT
oppure
– resettare l’errore con l’handheld (selezionare CPX-MMI,menu [Diagnostics], tasto [Reset Fault] ).
oppure
– disinserire e reinserire la tensione d’esercizio.
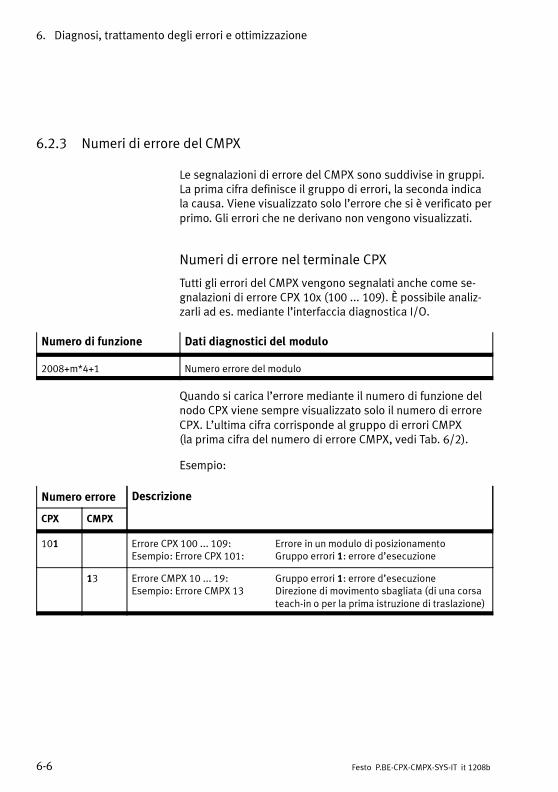
6. Diagnosi, trattamento degli errori e ottimizzazione
6-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.2.3 Numeri di errore del CMPX
Le segnalazioni di errore del CMPX sono suddivise in gruppi.La prima cifra definisce il gruppo di errori, la seconda indicala causa. Viene visualizzato solo l’errore che si è verificato perprimo. Gli errori che ne derivano non vengono visualizzati.
Numeri di errore nel terminale CPX
Tutti gli errori del CMPX vengono segnalati anche come se-gnalazioni di errore CPX 10x (100 ... 109). È possibile analiz-zarli ad es. mediante l’interfaccia diagnostica I/O.
Numero di funzione Dati diagnostici del modulo
2008+m*4+1 Numero errore del modulo
Quando si carica l’errore mediante il numero di funzione delnodo CPX viene sempre visualizzato solo il numero di erroreCPX. L’ultima cifra corrisponde al gruppo di errori CMPX(la prima cifra del numero di errore CMPX, vedi Tab. 6/2).
Esempio:
Numero errore Descrizione
CPX CMPX
101 Errore CPX 100 ... 109: Errore in un modulo di posizionamentoEsempio: Errore CPX 101: Gruppo errori 1: errore d’esecuzione
13 Errore CMPX 10 ... 19: Gruppo errori 1: errore d’esecuzioneEsempio: Errore CMPX 13 Direzione di movimento sbagliata (di una corsa
teach-in o per la prima istruzione di traslazione)

6. Diagnosi, trattamento degli errori e ottimizzazione
6-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Numero errore Descrizione Trattamento degli errori
CPX CMPX
100 Errore di configurazione (handheld: [Configuration error] )
01 La configurazione nominale si discosta daquella effettiva(handheld: [Actual configuration not thesame as nominal configuration] )
• Controllare o correggere la configura-zione dell’occupazione di linea sullaconnessione assi oppure
• Acquisire i dati della configurazionereale con un nuova procedura diteach-in.
02 Tipo di valvola sconosciuto(handheld: [Unknown type of valve] )
• Disinserire e reinserire l’alimenta-zione di tensione.
• Sostituire la valvola.
04 Tipo di sistema di misura sconosciuto(handheld: [Unknown type of measuringsystem] )
• Disinserire e reinserire l’alimenta-zione di tensione.
• Sostituire il sistema di misura.
101 Errore d’esecuzione (handheld: [Execution error] )
10 Attuatore senza riferimento definito(handheld: [Drive is not referenced] )
Per il sistema di misura incrementale:• Eseguire la corsa di riferimento.
12 Errore di offset durante l’identificazionestatica (rigidità della battuta fissa insuffi-ciente)(handheld: [Offset error during static identi-fication – stiffness of the mechanical end-stop is too low] )
Rigidità insufficiente della battuta fissa:• Assicurare la rigidità delle battute
fisse.• Ripetere la procedura di teach-in a
pressione più bassa (e poi impostaredi nuovo la pressione normale).
13 Direzione di movimento sbagliata(durante la corsa teach-in o la prima istru-zione di traslazione)(handheld: [Incorrect direction of movement(during teach procedure or during the1st drive command)] )
• Controllare se la tubazione è colle-gata male ed eventualmente correg-gerla.
Per il sistema di misura incrementale:• Controllare il sensore.Il monitoraggio viene disattivato non ap-pena viene eseguito un movimento nellaposizione di destinazione con esito posi-tivo.
14 Arresto con inversione della direzione nonconsentita durante la prima istruzione ditraslazione(handheld: [Stop with non-permitted rever-sal of movement during the 1st drive com-mand] )
L’attuatore non è sotto controllo.L’identificazione della direzione di movi-mento resta attiva:• Attivare l’arresto con inversione di
movimento solo dopo la prima corsa.
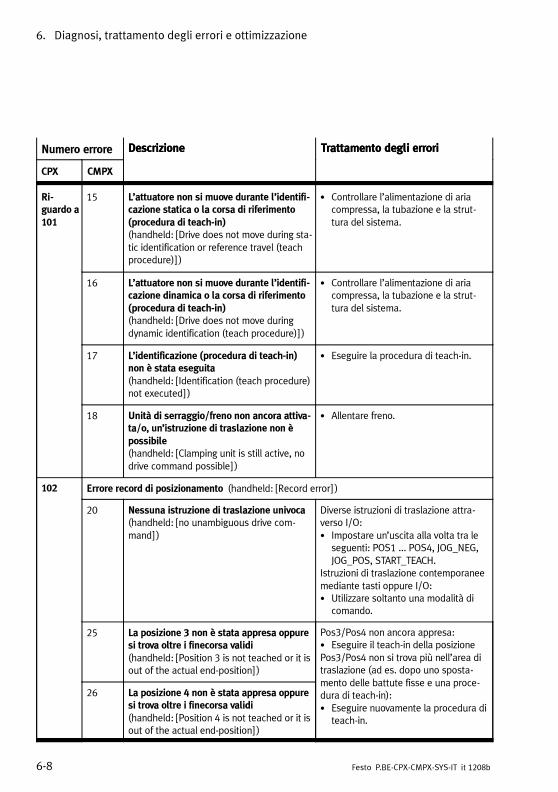
6. Diagnosi, trattamento degli errori e ottimizzazione
6-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Numero errore Trattamento degli erroriDescrizione
CPX
Trattamento degli erroriDescrizione
CMPX
Ri-guardo a101
15 L’attuatore non si muove durante l’identifi-cazione statica o la corsa di riferimento(procedura di teach-in)(handheld: [Drive does not move during sta-tic identification or reference travel (teachprocedure)] )
• Controllare l’alimentazione di ariacompressa, la tubazione e la strut-tura del sistema.
16 L’attuatore non si muove durante l’identifi-cazione dinamica o la corsa di riferimento(procedura di teach-in)(handheld: [Drive does not move duringdynamic identification (teach procedure)] )
• Controllare l’alimentazione di ariacompressa, la tubazione e la strut-tura del sistema.
17 L’identificazione (procedura di teach-in)non è stata eseguita(handheld: [Identification (teach procedure)not executed] )
• Eseguire la procedura di teach-in.
18 Unità di serraggio/freno non ancora attiva-ta/o, un’istruzione di traslazione non èpossibile(handheld: [Clamping unit is still active, nodrive command possible] )
• Allentare freno.
102 Errore record di posizionamento (handheld: [Record error] )
20 Nessuna istruzione di traslazione univoca(handheld: [no unambiguous drive com-mand] )
Diverse istruzioni di traslazione attra-verso I/O:• Impostare un’uscita alla volta tra le
seguenti: POS1 ... POS4, JOG_NEG,JOG_POS, START_TEACH.
Istruzioni di traslazione contemporaneemediante tasti oppure I/O:• Utilizzare soltanto una modalità di
comando.
25 La posizione 3 non è stata appresa oppuresi trova oltre i finecorsa validi(handheld: [Position 3 is not teached or it isout of the actual end-position] )
Pos3/Pos4 non ancora appresa:• Eseguire il teach-in della posizionePos3/Pos4 non si trova più nell’area ditraslazione (ad es. dopo uno sposta-mento delle battute fisse e una proce-dura di teach-in):• Eseguire nuovamente la procedura di
teach-in.
26 La posizione 4 non è stata appresa oppuresi trova oltre i finecorsa validi(handheld: [Position 4 is not teached or it isout of the actual end-position] )
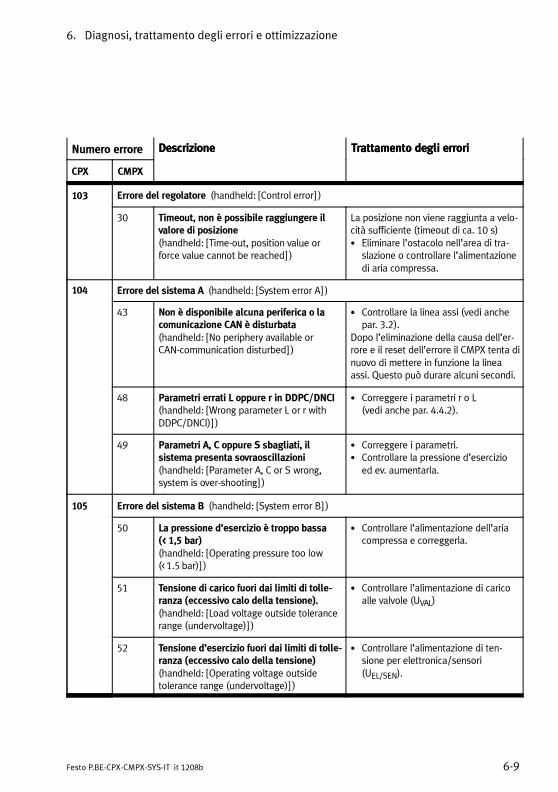
6. Diagnosi, trattamento degli errori e ottimizzazione
6-9Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Numero errore Trattamento degli erroriDescrizione
CPX
Trattamento degli erroriDescrizione
CMPX
103 Errore del regolatore (handheld: [Control error] )
30 Timeout, non è possibile raggiungere ilvalore di posizione(handheld: [Time-out, position value orforce value cannot be reached] )
La posizione non viene raggiunta a velo-cità sufficiente (timeout di ca. 10 s)• Eliminare l’ostacolo nell’area di tra-
slazione o controllare l’alimentazionedi aria compressa.
104 Errore del sistema A (handheld: [System error A] )
43 Non è disponibile alcuna periferica o lacomunicazione CAN è disturbata(handheld: [No periphery available orCAN-communication disturbed] )
• Controllare la linea assi (vedi anchepar. 3.2).
Dopo l’eliminazione della causa dell’er-rore e il reset dell’errore il CMPX tenta dinuovo di mettere in funzione la lineaassi. Questo può durare alcuni secondi.
48 Parametri errati L oppure r in DDPC/DNCI(handheld: [Wrong parameter L or r withDDPC/DNCI)] )
• Correggere i parametri r o L(vedi anche par. 4.4.2).
49 Parametri A, C oppure S sbagliati, ilsistema presenta sovraoscillazioni(handheld: [Parameter A, C or S wrong,system is over-shooting] )
• Correggere i parametri.• Controllare la pressione d’esercizio
ed ev. aumentarla.
105 Errore del sistema B (handheld: [System error B] )
50 La pressione d’esercizio è troppo bassa(< 1,5 bar)(handheld: [Operating pressure too low(<1.5 bar)] )
• Controllare l’alimentazione dell’ariacompressa e correggerla.
51 Tensione di carico fuori dai limiti di tolle-ranza (eccessivo calo della tensione).(handheld: [Load voltage outside tolerancerange (undervoltage)] )
• Controllare l’alimentazione di caricoalle valvole (UVAL)
52 Tensione d’esercizio fuori dai limiti di tolle-ranza (eccessivo calo della tensione)(handheld: [Operating voltage outsidetolerance range (undervoltage)] )
• Controllare l’alimentazione di ten-sione per elettronica/sensori(UEL/SEN).
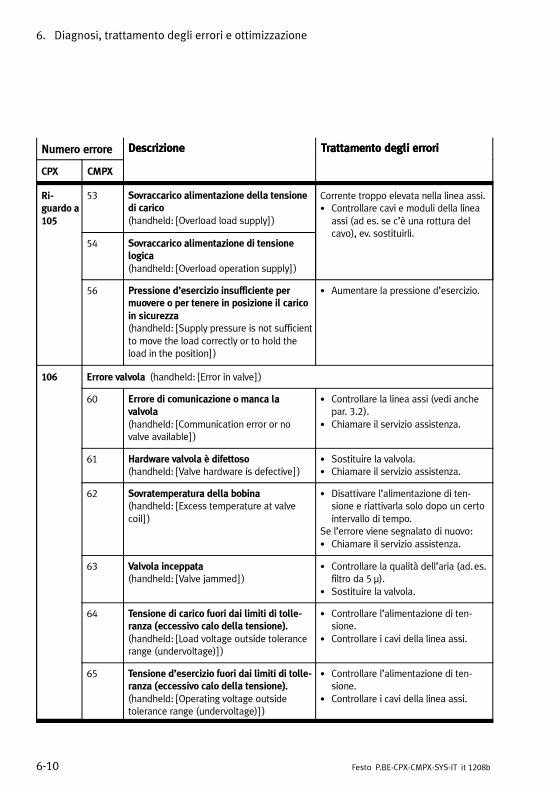
6. Diagnosi, trattamento degli errori e ottimizzazione
6-10 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Numero errore Trattamento degli erroriDescrizione
CPX
Trattamento degli erroriDescrizione
CMPX
Ri-guardo a105
53 Sovraccarico alimentazione della tensionedi carico(handheld: [Overload load supply] )
Corrente troppo elevata nella linea assi.• Controllare cavi e moduli della linea
assi (ad es. se c’è una rottura delcavo), ev. sostituirli.
54 Sovraccarico alimentazione di tensionelogica(handheld: [Overload operation supply] )
56 Pressione d’esercizio insufficiente permuovere o per tenere in posizione il caricoin sicurezza(handheld: [Supply pressure is not sufficientto move the load correctly or to hold theload in the position] )
• Aumentare la pressione d’esercizio.
106 Errore valvola (handheld: [Error in valve] )
60 Errore di comunicazione o manca lavalvola(handheld: [Communication error or novalve available] )
• Controllare la linea assi (vedi anchepar. 3.2).
• Chiamare il servizio assistenza.
61 Hardware valvola è difettoso(handheld: [Valve hardware is defective] )
• Sostituire la valvola.• Chiamare il servizio assistenza.
62 Sovratemperatura della bobina(handheld: [Excess temperature at valvecoil] )
• Disattivare l’alimentazione di ten-sione e riattivarla solo dopo un certointervallo di tempo.
Se l’errore viene segnalato di nuovo:• Chiamare il servizio assistenza.
63 Valvola inceppata(handheld: [Valve jammed] )
• Controllare la qualità dell’aria (ad.es.filtro da 5 μ).
• Sostituire la valvola.
64 Tensione di carico fuori dai limiti di tolle-ranza (eccessivo calo della tensione).(handheld: [Load voltage outside tolerancerange (undervoltage)] )
• Controllare l’alimentazione di ten-sione.
• Controllare i cavi della linea assi.
65 Tensione d’esercizio fuori dai limiti di tolle-ranza (eccessivo calo della tensione).(handheld: [Operating voltage outsidetolerance range (undervoltage)] )
• Controllare l’alimentazione di ten-sione.
• Controllare i cavi della linea assi.
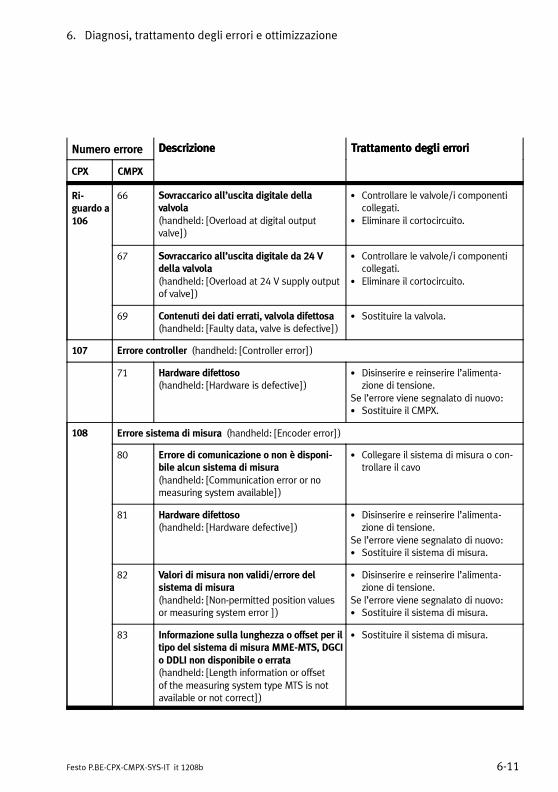
6. Diagnosi, trattamento degli errori e ottimizzazione
6-11Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Numero errore Trattamento degli erroriDescrizione
CPX
Trattamento degli erroriDescrizione
CMPX
Ri-guardo a106
66 Sovraccarico all’uscita digitale dellavalvola(handheld: [Overload at digital outputvalve] )
• Controllare le valvole/i componenticollegati.
• Eliminare il cortocircuito.
67 Sovraccarico all’uscita digitale da 24 Vdella valvola(handheld: [Overload at 24 V supply outputof valve] )
• Controllare le valvole/i componenticollegati.
• Eliminare il cortocircuito.
69 Contenuti dei dati errati, valvola difettosa(handheld: [Faulty data, valve is defective] )
• Sostituire la valvola.
107 Errore controller (handheld: [Controller error] )
71 Hardware difettoso(handheld: [Hardware is defective] )
• Disinserire e reinserire l’alimenta-zione di tensione.
Se l’errore viene segnalato di nuovo:• Sostituire il CMPX.
108 Errore sistema di misura (handheld: [Encoder error] )
80 Errore di comunicazione o non è disponi-bile alcun sistema di misura(handheld: [Communication error or nomeasuring system available] )
• Collegare il sistema di misura o con-trollare il cavo
81 Hardware difettoso(handheld: [Hardware defective] )
• Disinserire e reinserire l’alimenta-zione di tensione.
Se l’errore viene segnalato di nuovo:• Sostituire il sistema di misura.
82 Valori di misura non validi/errore delsistema di misura(handheld: [Non-permitted position valuesor measuring system error ] )
• Disinserire e reinserire l’alimenta-zione di tensione.
Se l’errore viene segnalato di nuovo:• Sostituire il sistema di misura.
83 Informazione sulla lunghezza o offset per iltipo del sistema di misura MME-MTS, DGCIo DDLI non disponibile o errata(handheld: [Length information or offsetof the measuring system type MTS is notavailable or not correct] )
• Sostituire il sistema di misura.
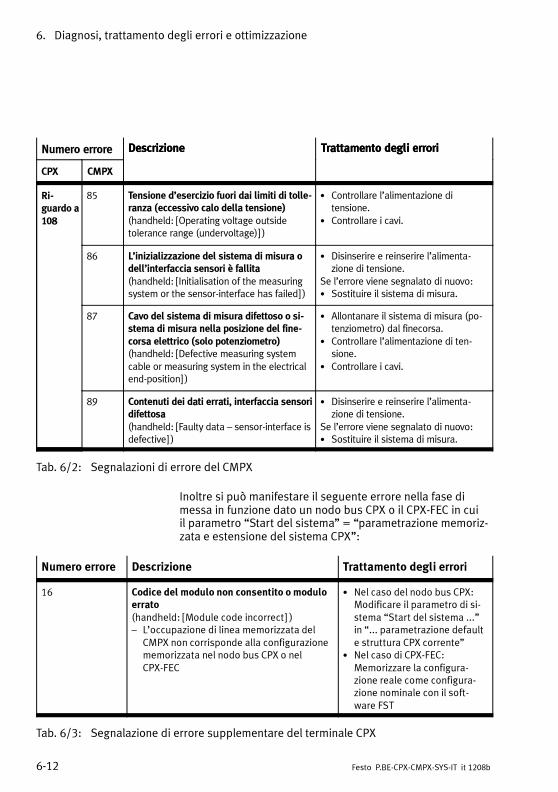
6. Diagnosi, trattamento degli errori e ottimizzazione
6-12 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Numero errore Trattamento degli erroriDescrizione
CPX
Trattamento degli erroriDescrizione
CMPX
Ri-guardo a108
85 Tensione d’esercizio fuori dai limiti di tolle-ranza (eccessivo calo della tensione)(handheld: [Operating voltage outsidetolerance range (undervoltage)] )
• Controllare l’alimentazione ditensione.
• Controllare i cavi.
86 L’inizializzazione del sistema di misura odell’interfaccia sensori è fallita(handheld: [Initialisation of the measuringsystem or the sensor-interface has failed] )
• Disinserire e reinserire l’alimenta-zione di tensione.
Se l’errore viene segnalato di nuovo:• Sostituire il sistema di misura.
87 Cavo del sistema di misura difettoso o si-stema di misura nella posizione del fine-corsa elettrico (solo potenziometro)(handheld: [Defective measuring systemcable or measuring system in the electricalend-position] )
• Allontanare il sistema di misura (po-tenziometro) dal finecorsa.
• Controllare l’alimentazione di ten-sione.
• Controllare i cavi.
89 Contenuti dei dati errati, interfaccia sensoridifettosa(handheld: [Faulty data – sensor-interface isdefective] )
• Disinserire e reinserire l’alimenta-zione di tensione.
Se l’errore viene segnalato di nuovo:• Sostituire il sistema di misura.
Tab. 6/2: Segnalazioni di errore del CMPX
Inoltre si può manifestare il seguente errore nella fase dimessa in funzione dato un nodo bus CPX o il CPX-FEC in cuiil parametro “Start del sistema” = “parametrazione memoriz-zata e estensione del sistema CPX”:
Numero errore Descrizione Trattamento degli errori
16 Codice del modulo non consentito o moduloerrato(handheld: [Module code incorrect] )– L’occupazione di linea memorizzata del
CMPX non corrisponde alla configurazionememorizzata nel nodo bus CPX o nelCPX-FEC
• Nel caso del nodo bus CPX:Modificare il parametro di si-stema “Start del sistema ...”in “... parametrazione defaulte struttura CPX corrente”
• Nel caso di CPX-FEC:Memorizzare la configura-zione reale come configura-zione nominale con il soft-ware FST
Tab. 6/3: Segnalazione di errore supplementare del terminale CPX
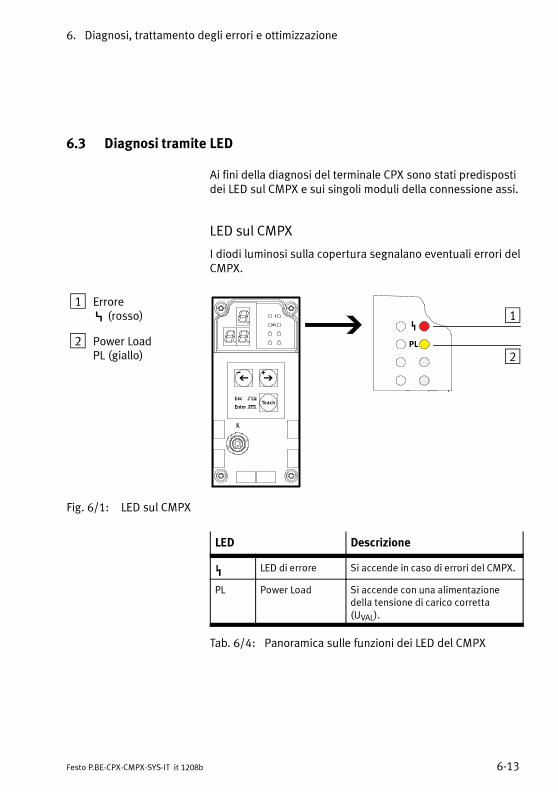
6. Diagnosi, trattamento degli errori e ottimizzazione
6-13Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.3 Diagnosi tramite LED
Ai fini della diagnosi del terminale CPX sono stati predispostidei LED sul CMPX e sui singoli moduli della connessione assi.
LED sul CMPX
I diodi luminosi sulla copertura segnalano eventuali errori delCMPX.
1 ErroreP (rosso)
2 Power LoadPL (giallo)
PL
1
2
Fig. 6/1: LED sul CMPX
LED Descrizione
LED di errore Si accende in caso di errori del CMPX.
PL Power Load Si accende con una alimentazionedella tensione di carico corretta(UVAL).
Tab. 6/4: Panoramica sulle funzioni dei LED del CMPX

6. Diagnosi, trattamento degli errori e ottimizzazione
6-14 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.3.1 Stato di esercizio normale
Indicatore LED Stato di esercizio
PL
Il LED di errorerosso è spento:– nessun erroreIl LED PL giallo siaccende:– L’alimentazione
della tensione dicarico per le val-vole è presente
normale
Tab. 6/5: Indicatore LED – stato di esercizio normale
6.3.2 LED specifici di CMPX
(errore) – Errore CMPX
LED (rosso) Sequenza Stato
LED spento
ON
OFF
Nessun errore.
LED acceso
ON
OFF
Segnalazione di errore del CMPX
PL (Power Load) – Alimentazione della tensione di carico valvole
LED (giallo) Sequenza Stato
LED acceso
ON
OFF
L’alimentazione della tensione di carico 24 V per le valvole è presente
LED spento
ON
OFF
Eccessivo calo della tensione dell’alimentazione di carico alle valvole(UVAL) oppure manca l’alimentazione di carico.
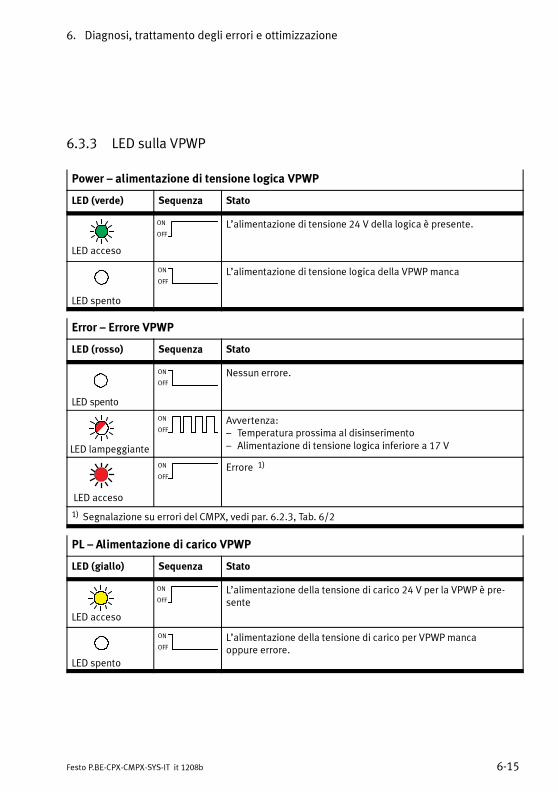
6. Diagnosi, trattamento degli errori e ottimizzazione
6-15Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.3.3 LED sulla VPWP
Power – alimentazione di tensione logica VPWP
LED (verde) Sequenza Stato
LED acceso
ON
OFF
L’alimentazione di tensione 24 V della logica è presente.
LED spento
ON
OFF
L’alimentazione di tensione logica della VPWP manca
Error – Errore VPWP
LED (rosso) Sequenza Stato
LED spento
ON
OFF
Nessun errore.
LED lampeggiante
ON
OFF
Avvertenza:– Temperatura prossima al disinserimento– Alimentazione di tensione logica inferiore a 17 V
LED acceso
ON
OFF
Errore 1)
1) Segnalazione su errori del CMPX, vedi par. 6.2.3, Tab. 6/2
PL – Alimentazione di carico VPWP
LED (giallo) Sequenza Stato
LED acceso
ON
OFF
L’alimentazione della tensione di carico 24 V per la VPWP è pre-sente
LED spento
ON
OFF
L’alimentazione della tensione di carico per VPWP mancaoppure errore.
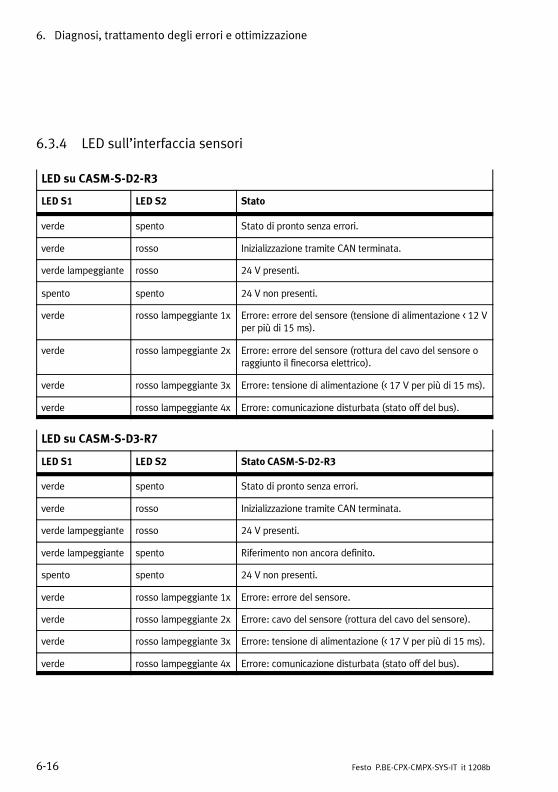
6. Diagnosi, trattamento degli errori e ottimizzazione
6-16 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.3.4 LED sull’interfaccia sensori
LED su CASM-S-D2-R3
LED S1 LED S2 Stato
verde spento Stato di pronto senza errori.
verde rosso Inizializzazione tramite CAN terminata.
verde lampeggiante rosso 24 V presenti.
spento spento 24 V non presenti.
verde rosso lampeggiante 1x Errore: errore del sensore (tensione di alimentazione < 12 Vper più di 15 ms).
verde rosso lampeggiante 2x Errore: errore del sensore (rottura del cavo del sensore oraggiunto il finecorsa elettrico).
verde rosso lampeggiante 3x Errore: tensione di alimentazione (< 17 V per più di 15 ms).
verde rosso lampeggiante 4x Errore: comunicazione disturbata (stato off del bus).
LED su CASM-S-D3-R7
LED S1 LED S2 Stato CASM-S-D2-R3
verde spento Stato di pronto senza errori.
verde rosso Inizializzazione tramite CAN terminata.
verde lampeggiante rosso 24 V presenti.
verde lampeggiante spento Riferimento non ancora definito.
spento spento 24 V non presenti.
verde rosso lampeggiante 1x Errore: errore del sensore.
verde rosso lampeggiante 2x Errore: cavo del sensore (rottura del cavo del sensore).
verde rosso lampeggiante 3x Errore: tensione di alimentazione (< 17 V per più di 15 ms).
verde rosso lampeggiante 4x Errore: comunicazione disturbata (stato off del bus).

6. Diagnosi, trattamento degli errori e ottimizzazione
6-17Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.3.5 LED sul sistema di misura (solo DGCI)
LED sul sistema di misura DGCI
LED Power LED Error Stato
verde spento Nessun errore (stato di esercizio normale)
spento spento Nessun’alimentazione di tensione
spento rosso Errore: inizializzazione tramite CAN fallita.
verde rosso Errore: magnete non identificato o numero di magneti errato
verde lampeggiante rosso lampeggiante Errore: tensione di esercizio al di fuori del campo indicato
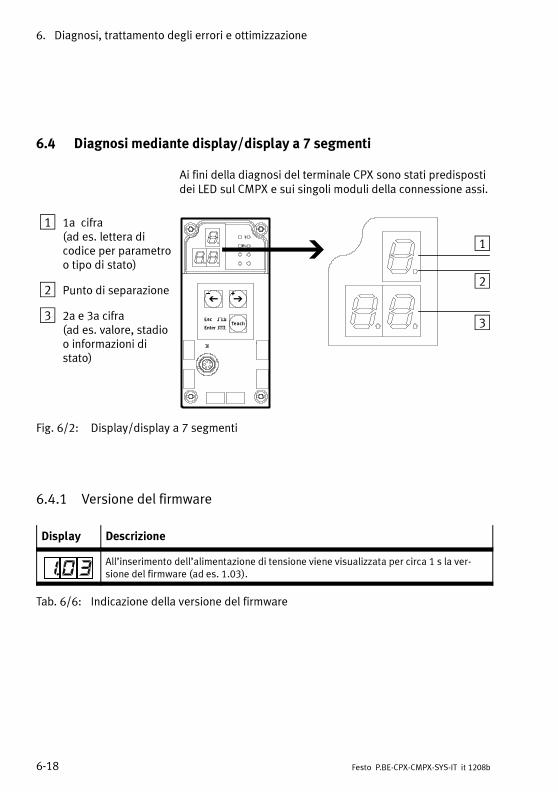
6. Diagnosi, trattamento degli errori e ottimizzazione
6-18 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.4 Diagnosi mediante display/display a 7 segmenti
Ai fini della diagnosi del terminale CPX sono stati predispostidei LED sul CMPX e sui singoli moduli della connessione assi.
1 1a cifra(ad es. lettera dicodice per parametroo tipo di stato)
2 Punto di separazione
3 2a e 3a cifra(ad es. valore, stadioo informazioni distato)
1
2
3
Fig. 6/2: Display/display a 7 segmenti
6.4.1 Versione del firmware
Display Descrizione
All’inserimento dell’alimentazione di tensione viene visualizzata per circa 1 s la ver-sione del firmware (ad es. 1.03).
Tab. 6/6: Indicazione della versione del firmware
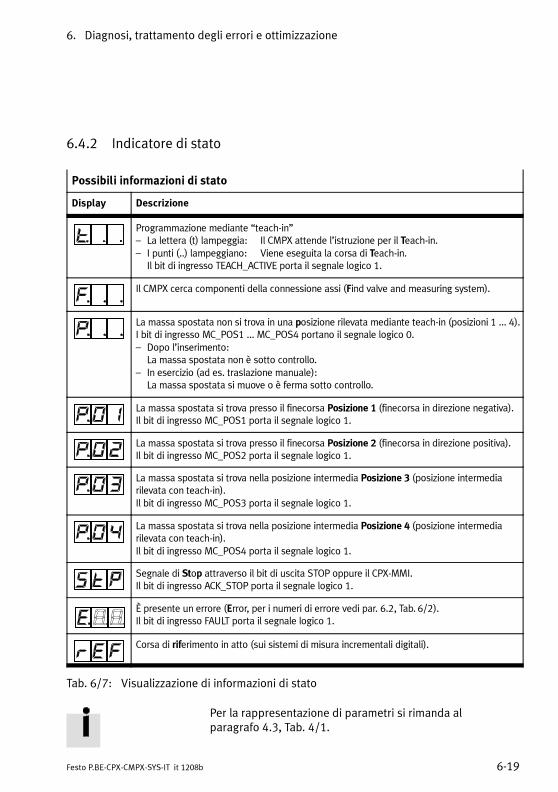
6. Diagnosi, trattamento degli errori e ottimizzazione
6-19Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.4.2 Indicatore di stato
Possibili informazioni di stato
Display Descrizione
Programmazione mediante “teach-in”– La lettera (t) lampeggia: Il CMPX attende l’istruzione per il Teach-in.– I punti (..) lampeggiano: Viene eseguita la corsa di Teach-in.
Il bit di ingresso TEACH_ACTIVE porta il segnale logico 1.
Il CMPX cerca componenti della connessione assi (Find valve and measuring system).
La massa spostata non si trova in una posizione rilevata mediante teach-in (posizioni 1 ... 4).I bit di ingresso MC_POS1 ... MC_POS4 portano il segnale logico 0.– Dopo l’inserimento:
La massa spostata non è sotto controllo.– In esercizio (ad es. traslazione manuale):
La massa spostata si muove o è ferma sotto controllo.
La massa spostata si trova presso il finecorsa Posizione 1 (finecorsa in direzione negativa).Il bit di ingresso MC_POS1 porta il segnale logico 1.
La massa spostata si trova presso il finecorsa Posizione 2 (finecorsa in direzione positiva).Il bit di ingresso MC_POS2 porta il segnale logico 1.
La massa spostata si trova nella posizione intermedia Posizione 3 (posizione intermediarilevata con teach-in).Il bit di ingresso MC_POS3 porta il segnale logico 1.
La massa spostata si trova nella posizione intermedia Posizione 4 (posizione intermediarilevata con teach-in).Il bit di ingresso MC_POS4 porta il segnale logico 1.
Segnale di Stop attraverso il bit di uscita STOP oppure il CPX-MMI.Il bit di ingresso ACK_STOP porta il segnale logico 1.
È presente un errore (Error, per i numeri di errore vedi par. 6.2, Tab. 6/2).Il bit di ingresso FAULT porta il segnale logico 1.
Corsa di riferimento in atto (sui sistemi di misura incrementali digitali).
Tab. 6/7: Visualizzazione di informazioni di stato
Per la rappresentazione di parametri si rimanda alparagrafo 4.3, Tab. 4/1.
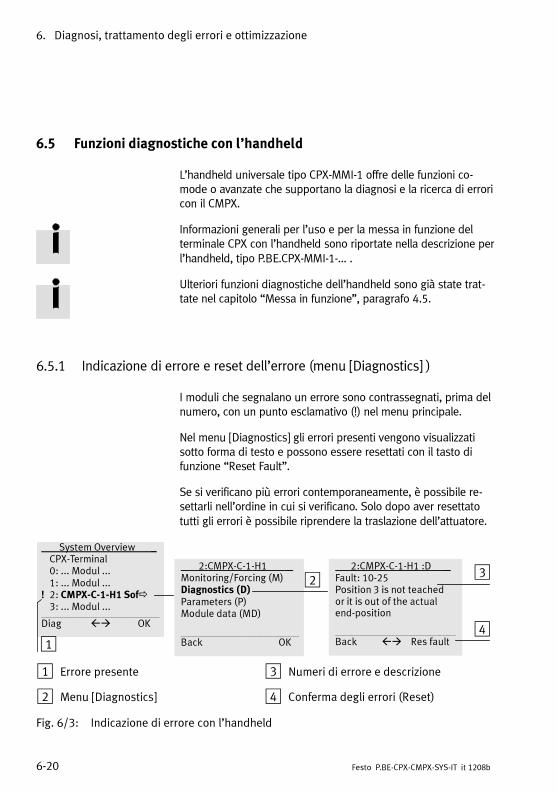
6. Diagnosi, trattamento degli errori e ottimizzazione
6-20 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.5 Funzioni diagnostiche con l’handheld
L’handheld universale tipo CPX-MMI-1 offre delle funzioni co-mode o avanzate che supportano la diagnosi e la ricerca di erroricon il CMPX.
Informazioni generali per l’uso e per la messa in funzione delterminale CPX con l’handheld sono riportate nella descrizione perl’handheld, tipo P.BE.CPX-MMI-1-... .
Ulteriori funzioni diagnostiche dell’handheld sono già state trat-tate nel capitolo “Messa in funzione”, paragrafo 4.5.
6.5.1 Indicazione di errore e reset dell’errore (menu [Diagnostics] )
I moduli che segnalano un errore sono contrassegnati, prima delnumero, con un punto esclamativo (!) nel menu principale.
Nel menu [Diagnostics] gli errori presenti vengono visualizzatisotto forma di testo e possono essere resettati con il tasto difunzione “Reset Fault”.
Se si verificano più errori contemporaneamente, è possibile re-settarli nell’ordine in cui si verificano. Solo dopo aver resettatotutti gli errori è possibile riprendere la traslazione dell’attuatore.
System Overview _CPX-Terminal0: ... Modul ...1: ... Modul ...
! 2: CMPX-C-1-H1 Sof�3: ... Modul ...
_____________________________________________________
Diag �� OK
1
2:CMPX-C-1-H1 _Monitoring/Forcing (M)Diagnostics (D)Parameters (P)Module data (MD)
_____________________________________________________
Back OK
2:CMPX-C-1-H1 :D _Fault: 10-25Position 3 is not teachedor it is out of the actualend-position
______________________________________________________
Back �� Res fault
23
4
1 Errore presente
2 Menu [Diagnostics]
3 Numeri di errore e descrizione
4 Conferma degli errori (Reset)
Fig. 6/3: Indicazione di errore con l’handheld
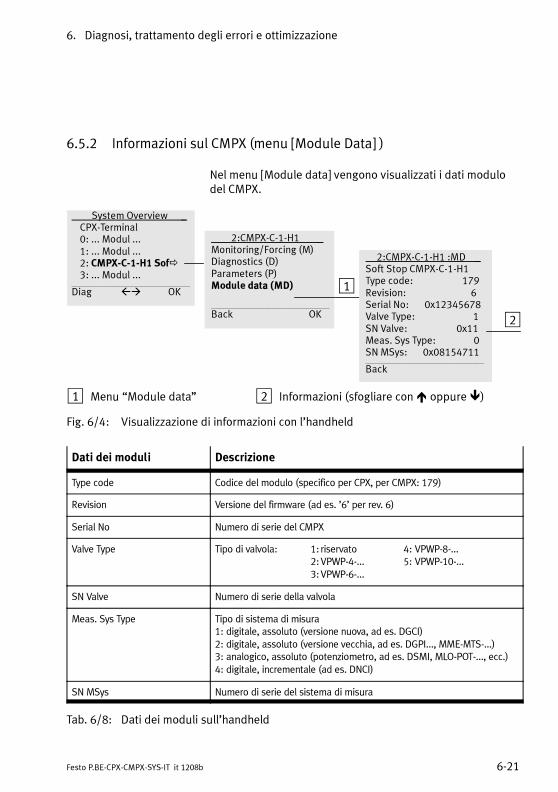
6. Diagnosi, trattamento degli errori e ottimizzazione
6-21Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.5.2 Informazioni sul CMPX (menu [Module Data] )
Nel menu [Module data] vengono visualizzati i dati modulodel CMPX.
System Overview _CPX-Terminal0: ... Modul ...1: ... Modul ...2: CMPX-C-1-H1 Sof�3: ... Modul ...
_____________________________________________________
Diag �� OK 1
2:CMPX-C-1-H1 _Monitoring/Forcing (M)Diagnostics (D)Parameters (P)Module data (MD)
_____________________________________________________
Back OK
2:CMPX-C-1-H1 :MD _Soft Stop CMPX-C-1-H1Type code: 179Revision: 6Serial No: 0x12345678Valve Type: 1SN Valve: 0x11Meas. Sys Type: 0SN MSys: 0x08154711_____________________________________________________
Back
2
1 Menu “Module data” 2 Informazioni (sfogliare con� oppure�)
Fig. 6/4: Visualizzazione di informazioni con l’handheld
Dati dei moduli Descrizione
Type code Codice del modulo (specifico per CPX, per CMPX: 179)
Revision Versione del firmware (ad es. ’6’ per rev. 6)
Serial No Numero di serie del CMPX
Valve Type Tipo di valvola: 1: riservato 4: VPWP-8-...2:VPWP-4-... 5: VPWP-10-...3:VPWP-6-...
SN Valve Numero di serie della valvola
Meas. Sys Type Tipo di sistema di misura1: digitale, assoluto (versione nuova, ad es. DGCI)2: digitale, assoluto (versione vecchia, ad es. DGPI..., MME-MTS-...)3: analogico, assoluto (potenziometro, ad es. DSMI, MLO-POT-..., ecc.)4: digitale, incrementale (ad es. DNCI)
SN MSys Numero di serie del sistema di misura
Tab. 6/8: Dati dei moduli sull’handheld
6. Diagnosi, trattamento degli errori e ottimizzazione
6-22 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.6 Diagnosi attraverso il nodo bus CPX o il CPX-FEC
Le anomalie del CMPX o dei moduli CP collegati vengonosegnalate come segnalazioni di errore CPX al nodo bus CPXo al CPX-FEC. I seguenti paragrafi trattano le particolarità dellarappresentazione per le specifiche possibilità di diagnosi CPX.
– Dati modulo I/O (vedi par. 6.6.1),
– Bit di stato (vedi par. 6.6.2)
– Memoria di diagnosi (interfaccia diagnostica I/O, vedipar. 6.6.3).
6.6.1 Dati di ingresso e di uscita dei moduli
Mediante i dati modulo I/O (vedi par. 5.3) sono disponibili fral’altro anche le seguenti informazioni diagnostiche.
Errori
Un errore è presente L’ingresso FAULT (bit 6 del byte di stato 1) mostra che è pre-sente un errore. Con l’uscita RESET_FAULT (bit 7 del Con-trollbyte 1) è possibile resettare l’errore.
Numero errore Il numero di errore di un errore presente viene reso disponi-bile nel secondo byte di ingresso (byte di stato 3).
Stato
POS1 ... POS4 Se l’attuatore si trovi presso uno dei finecorsa o in una delleposizioni intermedie viene segnalato mediante le uscite daMC_POS1 a MC_POS4.
Posizione reale La posizione reale attuale può essere letta con l’ausilio deltrasferimento dei parametri nel byte I/O 3 ... 5 (lettura/scrit-tura parametri), vedi paragrafo 5.4.
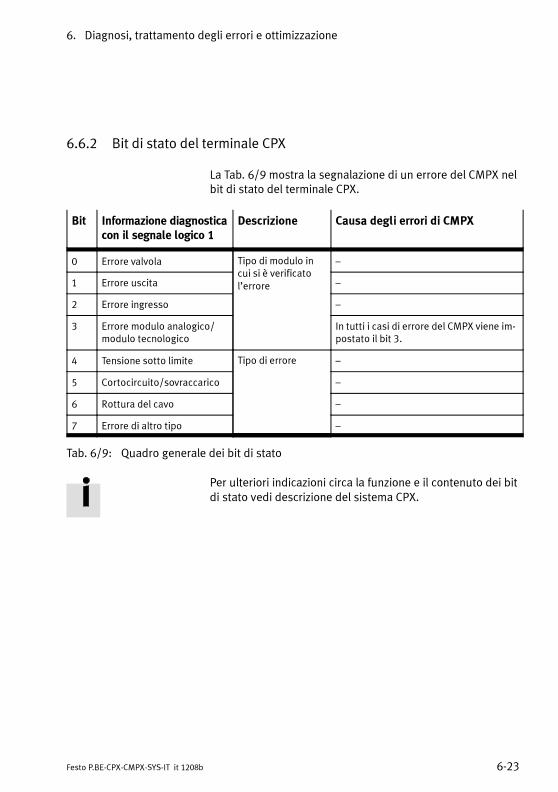
6. Diagnosi, trattamento degli errori e ottimizzazione
6-23Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.6.2 Bit di stato del terminale CPX
La Tab. 6/9 mostra la segnalazione di un errore del CMPX nelbit di stato del terminale CPX.
Bit Informazione diagnosticacon il segnale logico 1
Descrizione Causa degli errori di CMPX
0 Errore valvola Tipo di modulo incui si è verificatol’errore
–
1 Errore uscita –
2 Errore ingresso –
3 Errore modulo analogico/modulo tecnologico
In tutti i casi di errore del CMPX viene im-postato il bit 3.
4 Tensione sotto limite Tipo di errore –
5 Cortocircuito/sovraccarico –
6 Rottura del cavo –
7 Errore di altro tipo –
Tab. 6/9: Quadro generale dei bit di stato
Per ulteriori indicazioni circa la funzione e il contenuto dei bitdi stato vedi descrizione del sistema CPX.
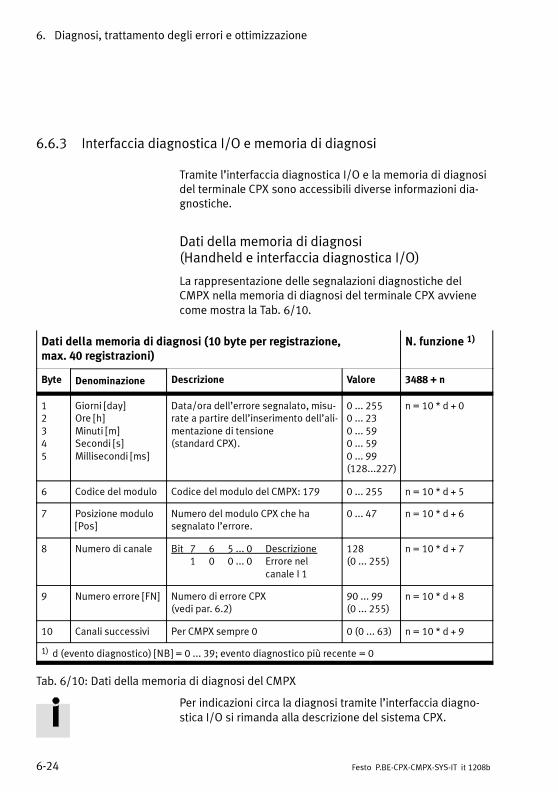
6. Diagnosi, trattamento degli errori e ottimizzazione
6-24 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.6.3 Interfaccia diagnostica I/O e memoria di diagnosi
Tramite l’interfaccia diagnostica I/O e la memoria di diagnosidel terminale CPX sono accessibili diverse informazioni dia-gnostiche.
Dati della memoria di diagnosi(Handheld e interfaccia diagnostica I/O)
La rappresentazione delle segnalazioni diagnostiche delCMPX nella memoria di diagnosi del terminale CPX avvienecome mostra la Tab. 6/10.
Dati della memoria di diagnosi (10 byte per registrazione,max. 40 registrazioni)
N. funzione 1)
Byte Denominazione Descrizione Valore 3488 + n
12345
Giorni [day]Ore [h]Minuti [m]Secondi [s]Millisecondi [ms]
Data/ora dell’errore segnalato, misu-rate a partire dell’inserimento dell’ali-mentazione di tensione(standard CPX).
0 ... 2550 ... 230 ... 590 ... 590 ... 99(128...227)
n = 10 * d + 0
6 Codice del modulo Codice del modulo del CMPX: 179 0 ... 255 n = 10 * d + 5
7 Posizione modulo[Pos]
Numero del modulo CPX che hasegnalato l’errore.
0 ... 47 n = 10 * d + 6
8 Numero di canale Bit 7 6 5 ... 0 Descrizione1 0 0 ... 0 Errore nel
canale I 1
128(0 ... 255)
n = 10 * d + 7
9 Numero errore [FN] Numero di errore CPX(vedi par. 6.2)
90 ... 99(0 ... 255)
n = 10 * d + 8
10 Canali successivi Per CMPX sempre 0 0 (0 ... 63) n = 10 * d + 9
1) d (evento diagnostico) [NB] = 0 ... 39; evento diagnostico più recente = 0
Tab. 6/10: Dati della memoria di diagnosi del CMPX
Per indicazioni circa la diagnosi tramite l’interfaccia diagno-stica I/O si rimanda alla descrizione del sistema CPX.

6. Diagnosi, trattamento degli errori e ottimizzazione
6-25Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Esempio di registrazione nella memoria di diagnosi perl’errore E.80
Dati della memoria di diagnosi Valore
Byte Denominazione Descrizione Dec Esad. Bin
12345
Giorni [day]Ore [h]Minuti [m]Secondi [s]Millisecondi [ms]
L’errore 22,66 ms è stato segnalatodopo l’inserzione dell'alimentazione ditensione (viene posto il bit 7 nel byte 5quando si tratta della prima registra-zione dopo l’inserimento).
0d0d0d22d194d
00h00h00h16hC2h
00000000b00000000b00000000b00010110b11000010b
6 Codice del modulo Codice del modulo del CMPX: 179 179d B3h 10110011b
7 Posizione modulo[Pos]
Il CMPX è qui il modulo CPX n. 2. 2d 02h 00000010b
8 Numero di canale Bit 7 6 5 ... 0 Descrizione1 0 0 ... 0 Errore nel canale
d’ingresso
128d 81h 10000001b
9 Numero errore [FN] Numero di errore CPX: 108 108d 6Ch 01101100b
10 Canali successivi Per CMPX sempre 0 0d 00h 00000000b
Tab. 6/11: Esempio di registrazione nella memoria di diagnosi
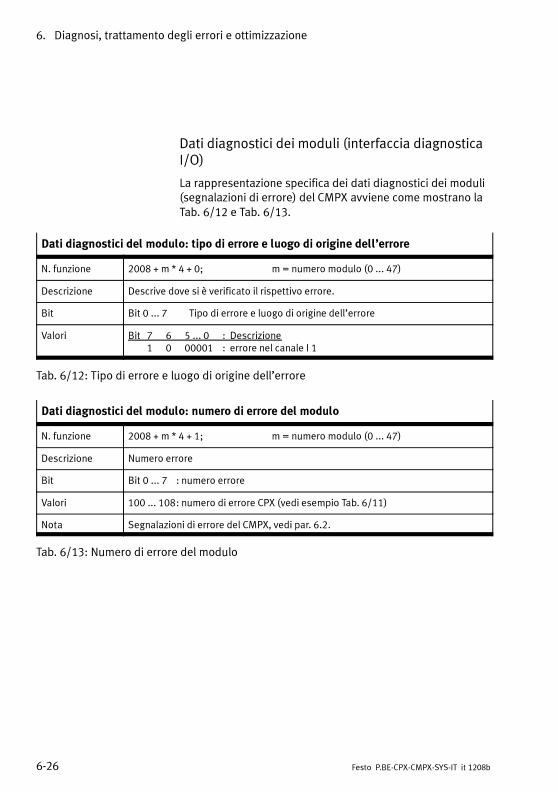
6. Diagnosi, trattamento degli errori e ottimizzazione
6-26 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Dati diagnostici dei moduli (interfaccia diagnosticaI/O)
La rappresentazione specifica dei dati diagnostici dei moduli(segnalazioni di errore) del CMPX avviene come mostrano laTab. 6/12 e Tab. 6/13.
Dati diagnostici del modulo: tipo di errore e luogo di origine dell’errore
N. funzione 2008 + m * 4 + 0; m = numero modulo (0 ... 47)
Descrizione Descrive dove si è verificato il rispettivo errore.
Bit Bit 0 ... 7 Tipo di errore e luogo di origine dell’errore
Valori Bit 7 6 5 ... 0 : Descrizione1 0 00001 : errore nel canale I 1
Tab. 6/12: Tipo di errore e luogo di origine dell’errore
Dati diagnostici del modulo: numero di errore del modulo
N. funzione 2008 + m * 4 + 1; m = numero modulo (0 ... 47)
Descrizione Numero errore
Bit Bit 0 ... 7 : numero errore
Valori 100 ... 108: numero di errore CPX (vedi esempio Tab. 6/11)
Nota Segnalazioni di errore del CMPX, vedi par. 6.2.
Tab. 6/13: Numero di errore del modulo
6. Diagnosi, trattamento degli errori e ottimizzazione
6-27Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Parametri del CMPX
I parametri del CMPX sono accessibili anche attraverso l’inter-faccia diagnostica I/O, vedi par. 5.5, Tab. 5/7.
Altre informazioni
Codice del modulo
N. funzione: 16 + m*16 + 0:Codice del modulo: 179
Codice di revisione
N. funzione: 16 + m*16 + 13Indica lo stato di edizione (versione) del modulo: 0 ... 255corrispondente a quanto riporta la targhetta di identificazionedel modulo
Numero di serie
N. funzione: 784 + m*4 + 0784 + m*4 + 1784 + m*4 + 2784 + m*4 + 3
Numero di serie del modulo.Byte 0: lower Nibble = anno, higher Nibble = mese della serie.Byte 1 ... 3: ogni nibble contiene una cifra del numero di serie(in codice BCD).
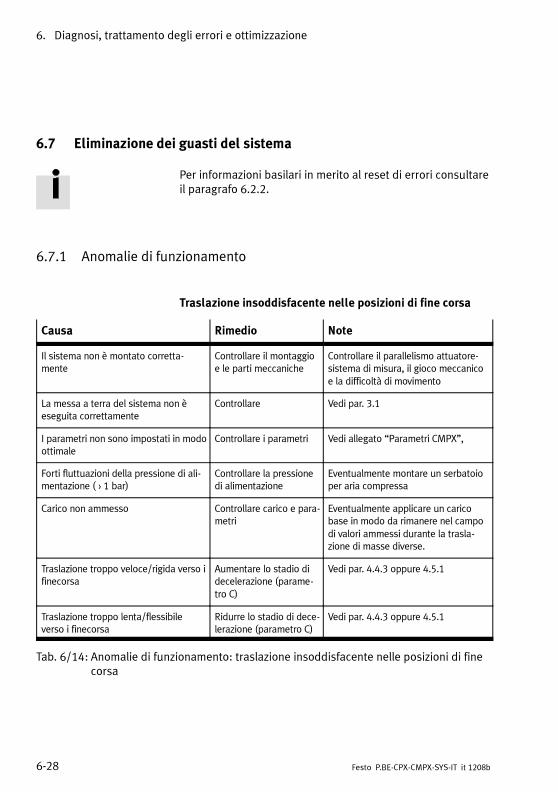
6. Diagnosi, trattamento degli errori e ottimizzazione
6-28 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.7 Eliminazione dei guasti del sistema
Per informazioni basilari in merito al reset di errori consultareil paragrafo 6.2.2.
6.7.1 Anomalie di funzionamento
Traslazione insoddisfacente nelle posizioni di fine corsa
Causa Rimedio Note
Il sistema non è montato corretta-mente
Controllare il montaggioe le parti meccaniche
Controllare il parallelismo attuatore-sistema di misura, il gioco meccanicoe la difficoltà di movimento
La messa a terra del sistema non èeseguita correttamente
Controllare Vedi par. 3.1
I parametri non sono impostati in modoottimale
Controllare i parametri Vedi allegato “Parametri CMPX”,
Forti fluttuazioni della pressione di ali-mentazione ( › 1 bar)
Controllare la pressionedi alimentazione
Eventualmente montare un serbatoioper aria compressa
Carico non ammesso Controllare carico e para-metri
Eventualmente applicare un caricobase in modo da rimanere nel campodi valori ammessi durante la trasla-zione di masse diverse.
Traslazione troppo veloce/rigida verso ifinecorsa
Aumentare lo stadio didecelerazione (parame-tro C)
Vedi par. 4.4.3 oppure 4.5.1
Traslazione troppo lenta/flessibileverso i finecorsa
Ridurre lo stadio di dece-lerazione (parametro C)
Vedi par. 4.4.3 oppure 4.5.1
Tab. 6/14: Anomalie di funzionamento: traslazione insoddisfacente nelle posizioni di finecorsa
6. Diagnosi, trattamento degli errori e ottimizzazione
6-29Festo P.BE-CPX-CMPX-SYS-IT it 1208b
6.8 Ottimizzazione
6.8.1 Ottimizzazione del posizionamento
Dopo la procedura di teach-in dopo ca. 20-30 corse, si osservaun miglioramento spontaneo del lavoro dell’attuatore (assesta-mento). Se il lavoro dell’attuatore non dovesse corrispondere airequisiti richiesti anche dopo tale operazione, procedere nelmodo seguente:
– Controllare i parametri A, C e S (vedi allegato “ParametriCMPX”).
– Controllare se i collegamenti meccaniciAttuatore – massa spostata,Attuatore – sistema di misura,Attuatore – telaio della macchinasono senza gioco.
– Controllare se l’installazione dei componenti pneumatici sod-disfa i requisiti riportati nel par. 2.6. Fare attenzione soprat-tutto alla stabilità della pressione di alimentazione, alle lun-ghezze, ai diametri e ai raccordi a vite corretti dei tubi.
– Controllare le opzioni impostate (parametro o). Le opzioniseguenti influenzano il lavoro dell’attuatore (vedi par. 4.3.3):
– Assestamento continuo ON/OFF,
– Traslazione flessibile nelle posizioni di fine corsa ON/OFF.
Se la massa spostata dovesse comunque muoversi con eccessivarigidità verso i finecorsa, o se dovesse decelerare eccessivamenteprima di raggiungerli, è possibile ottimizzare il lavoro dell’attua-tore aumentando o riducendo lo stadio di decelerazione e/o ac-celerazione.

6. Diagnosi, trattamento degli errori e ottimizzazione
6-30 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Stadio parametri regolatore Display
Stadio di accelerazione (Amplification stage)
Stadio di decelerazione (Cushioning stage)
AvvertenzaParametri errati possono danneggiare in modo irreparabilele battute fisse e l’attuatore.
Impostare quindi i parametri con la massima attenzione.
Quando si modificano i parametri, per motivi di sicurezzavengono cancellati i valori di assestamento e le posizioni deifinecorsa memorizzati. In seguito è necessario ripetere laprocedura di teach-in. Le posizioni intermedie rilevate in fasedi teach-in rimangono invariate.
Alla consegna tutti i parametri sono azzerati. Per ulterioriindicazioni sui parametri vedi allegato “Parametri CMPX”.
Stadio di decelerazione(Cushioning stage)
La modulazione della decelerazione contribuisce a ottimiz-zare la qualità della traslazione durante l’accostamento aifinecorsa (stadio inferiore = minore decelerazione).
Impostazione Descrizione
Eccessiva La traslazione viene fortemente decelerata.Il tempo di traslazione si allunga.
Insufficiente Si produce una sovraoscillazione eccessiva e, diconseguenza, un avvicinamento troppo rigido aifinecorsa.
Ottimale La fase di frenata (alimentazione di aria compressasul lato opposto) viene avviata con sufficiente anti-cipo. Vibrazioni ridotte durante l’avvicinamento aifinecorsa.
Stadio di accelerazione(Amplification stage)
In genere si consiglia di non modificare lo stadio di accelera-zione (stadio inferiore = accelerazione ridotta).

6. Diagnosi, trattamento degli errori e ottimizzazione
6-31Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Procedura di ottimizzazione (esempio con il pannello dicomando)
NotaSe, dopo aver ripetuto la procedura di teach-in dei fine-corsa, le posizioni intermedie (Pos3 e Pos4) precedente-mente rilevate dovessero risultare all’esterno dell’area ditraslazione, le istruzioni di traslazione verso tali posizionivengono ignorate e appare l’errore E.25 oppure E.26. Unavolta spostati e rilevati nuovamente i finecorsa, le istru-zioni di traslazione verso le posizioni intermedie vengonoeseguite non appena queste ultime rientrano nell’area ditraslazione ammessa.
Presupposto Sulle uscite da POS1 a POS4 deve essere posto un segnalelogico 0. Il carico massimo ed eventualmente le battute fissedevono essere montati correttamente.
1. Controllare innanzitutto quale stadio di decelerazionesi consiglia per i componenti in uso (vedi allegato“Parametri CMPX”).
2. Accertarsi che l’attuatore sia fermo.
AttenzioneAttivando il modo di modifica, la spola della valvola siporta sulla posizione centrale. Durante la traslazione, lamassa può raggiungere uno dei finecorsa senza decelera-zione.
Accertarsi che l’attuatore si sia fermato prima di attivare ilmodo di modifica.
3. Per attivare il modo di modifica, premere tutti e 3 i tastidel CMPX contemporaneamente (a questo fine è necessa-rio che l’uscita DISABLE_KEYS sia 0). Così facendo si at-tiva il modo di modifica. Il CMPX visualizza lo stadio diaccelerazione impostato, ad es.:
(A.02)
6. Diagnosi, trattamento degli errori e ottimizzazione
6-32 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
4. Con i tasti +/- aumentare o ridurre il valore di uno stadioin base alle caratteristiche di traslazione dell’attuatore.Per acquisire il valore, tenere premuto il tasto Enter perpiù di 2 secondi (> 2 s). Viene quindi visualizzato lo stadiodi decelerazione.
(C.04)
5. Con i tasti +/- aumentare o ridurre il valore di uno stadioin base alle caratteristiche di traslazione dell’attuatore.Per acquisire il valore, tenere premuto il tasto Enter perpiù di 2 secondi (> 2 s). Viene quindi visualizzato il para-metro del sistema.
(S.01)
6. Controllare ed eventualmente correggere l’impostazionecorrente. Per acquisire il valore, tenere premuto il tastoEnter per più di 2 secondi (> 2 s). Viene quindi visualizzatoil parametro successivo.
7. Controllare e correggere gli altri parametri:
– Sui sistemi di misura digitali, incrementali:- lunghezza corsa nominale (L)- offset punto zero assi (r)
– Su tutti i tipi:- parametro o (opzioni)
Un volta confermato il parametro o, il CMPX mostra diessere pronto ad eseguire la procedura di teach-in.
La “t” lampeggia.
6. Diagnosi, trattamento degli errori e ottimizzazione
6-33Festo P.BE-CPX-CMPX-SYS-IT it 1208b
NotaCon la seguente funzione, la massa spostata si muoveprima lentamente, poi con la massima velocità e accelera-zione. Assicurarsi che:
– sia possibile accedere all’area di traslazione della massaspostata solo se il sistema è stato depressurizzato,
– l’intera area di traslazione sia sgombra.
Per la programmazione mediante “teach-in” con il pannello dicomando all’uscita Disable_Keys deve essere posto il segnalelogico 0.
8. Tenere premuto il tasto Teach per almeno 2 secondi.Poi il CMPX esegue la procedura di teach-in. La massaspostata si muove prima lentamente, poi acquista velo-cità. Il display visualizza quanto segue:
I punti lampeggiano uniformemente.
La procedura di teach-in può richiedere alcuni minuti, infunzione dell’attuatore utilizzato. Tale operazione è conclusaquando l’attuatore si trova presso il finecorsa della posizione1. Il display visualizza quanto segue:
(Posizione 1)
L’ingresso POS1 porta il segnale logico 1. L’attuatore è orapronto per il funzionamento. Le posizioni intermedie (posi-zione 3 e 4) possono essere rilevate.
9. Controllare il lavoro dell’attuatore. Ripetere i punti 2 - 8 seil lavoro dell’attuatore non corrisponde ancora ai requisiti.

6. Diagnosi, trattamento degli errori e ottimizzazione
6-34 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Per intervenire sui tempi di traslazione:
• Aumentare o ridurre la pressione di alimentazione all’in-terno del campo ammesso.
• Installare strozzatori di scarico nelle apposite linee dellavalvola proporzionale di controllo portata.
NotaAssicurarsi che gli strozzatori di scarico siano completa-mente aperti durante la procedura di teach-in.
In caso di fluttuazioni della pressione superiori a 1 bar, instal-lare un serbatoio per aria compressa a monte della valvolaproporzionale di controllo portata (vedi par. 2.6). Attenersialle indicazioni generali per l’installazione!

Appendice tecnica
A-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Appendice A
Appendice tecnica
A. Appendice tecnica
A-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
A.1 Dati tecnici CMPX A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Accessori A-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.1 Componenti di un sistema Soft Stop A-5. . . . . . . . . . . . . . . . . . . . . . . .
A.2.2 Attuatori supportati A-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Sostituzione di componenti A-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4 Collegamenti pneumatici supplementari A-10. . . . . . . . . . . . . . . . . . . . . . . . . . . .
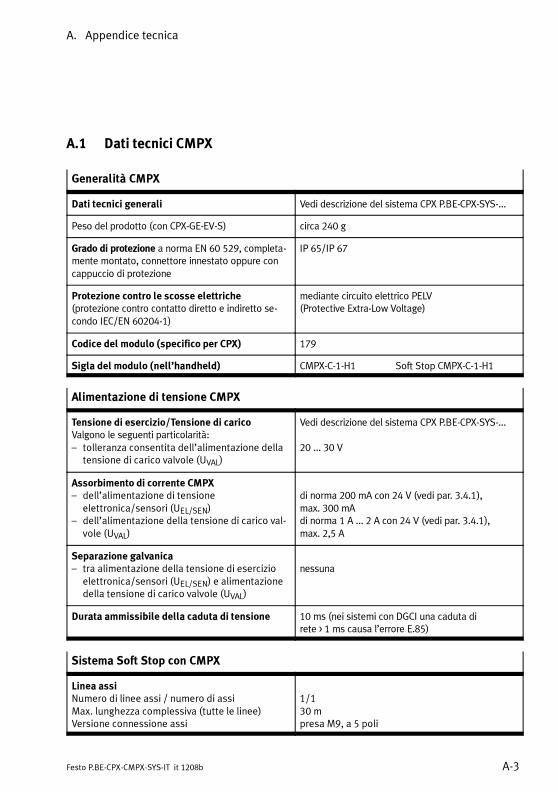
A. Appendice tecnica
A-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
A.1 Dati tecnici CMPX
Generalità CMPX
Dati tecnici generali Vedi descrizione del sistema CPX P.BE-CPX-SYS-...
Peso del prodotto (con CPX-GE-EV-S) circa 240 g
Grado di protezione a norma EN 60 529, completa-mente montato, connettore innestato oppure concappuccio di protezione
IP 65/IP 67
Protezione contro le scosse elettriche(protezione contro contatto diretto e indiretto se-condo IEC/EN 60204-1)
mediante circuito elettrico PELV(Protective Extra-Low Voltage)
Codice del modulo (specifico per CPX) 179
Sigla del modulo (nell’handheld) CMPX-C-1-H1 Soft Stop CMPX-C-1-H1
Alimentazione di tensione CMPX
Tensione di esercizio/Tensione di caricoValgono le seguenti particolarità:– tolleranza consentita dell’alimentazione della
tensione di carico valvole (UVAL)
Vedi descrizione del sistema CPX P.BE-CPX-SYS-...
20 ... 30 V
Assorbimento di corrente CMPX– dell’alimentazione di tensione
elettronica/sensori (UEL/SEN)– dell’alimentazione della tensione di carico val-
vole (UVAL)
di norma 200 mA con 24 V (vedi par. 3.4.1),max. 300 mAdi norma 1 A ... 2 A con 24 V (vedi par. 3.4.1),max. 2,5 A
Separazione galvanica– tra alimentazione della tensione di esercizio
elettronica/sensori (UEL/SEN) e alimentazionedella tensione di carico valvole (UVAL)
nessuna
Durata ammissibile della caduta di tensione 10 ms (nei sistemi con DGCI una caduta direte > 1 ms causa l’errore E.85)
Sistema Soft Stop con CMPX
Linea assiNumero di linee assi / numero di assiMax. lunghezza complessiva (tutte le linee)Versione connessione assi
1/130 mpresa M9, a 5 poli

A. Appendice tecnica
A-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
A.2 Accessori
Accessori necessari e utili per il CMPX:� www.festo.com/catalogue� cmpx
Per informazioni su attuatori e altri moduli da collegare allalinea assi e sui relativi accessori consultare i paragrafi A.2.1 eA.2.2 nonché la documentazione relativa ai moduli utilizzati.Informazioni circa gli accessori per il terminale CPX sono ri-portate nella descrizione del sistema CPX oppure in quella deimoduli CPX utilizzati.
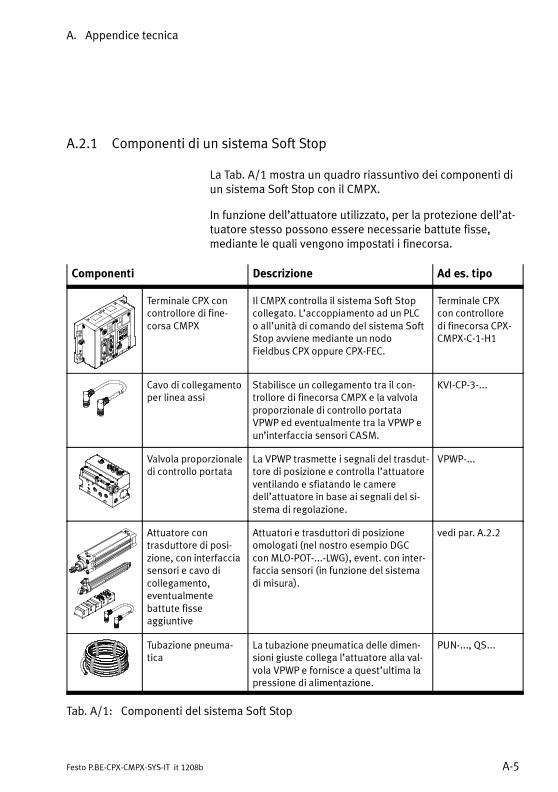
A. Appendice tecnica
A-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
A.2.1 Componenti di un sistema Soft Stop
La Tab. A/1 mostra un quadro riassuntivo dei componenti diun sistema Soft Stop con il CMPX.
In funzione dell’attuatore utilizzato, per la protezione dell’at-tuatore stesso possono essere necessarie battute fisse,mediante le quali vengono impostati i finecorsa.
Componenti Descrizione Ad es. tipo
Terminale CPX concontrollore di fine-corsa CMPX
Il CMPX controlla il sistema Soft Stopcollegato. L’accoppiamento ad un PLCo all’unità di comando del sistema SoftStop avviene mediante un nodoFieldbus CPX oppure CPX-FEC.
Terminale CPXcon controlloredi finecorsa CPX-CMPX-C-1-H1
Cavo di collegamentoper linea assi
Stabilisce un collegamento tra il con-trollore di finecorsa CMPX e la valvolaproporzionale di controllo portataVPWP ed eventualmente tra la VPWP eun’interfaccia sensori CASM.
KVI-CP-3-...
Valvola proporzionaledi controllo portata
La VPWP trasmette i segnali del trasdut-tore di posizione e controlla l’attuatoreventilando e sfiatando le cameredell’attuatore in base ai segnali del si-stema di regolazione.
VPWP-...
Attuatore contrasduttore di posi-zione, con interfacciasensori e cavo dicollegamento,eventualmentebattute fisseaggiuntive
Attuatori e trasduttori di posizioneomologati (nel nostro esempio DGCconMLO-POT-...-LWG), event. con inter-faccia sensori (in funzione del sistemadi misura).
vedi par. A.2.2
Tubazione pneuma-tica
La tubazione pneumatica delle dimen-sioni giuste collega l’attuatore alla val-vola VPWP e fornisce a quest’ultima lapressione di alimentazione.
PUN-..., QS...
Tab. A/1: Componenti del sistema Soft Stop
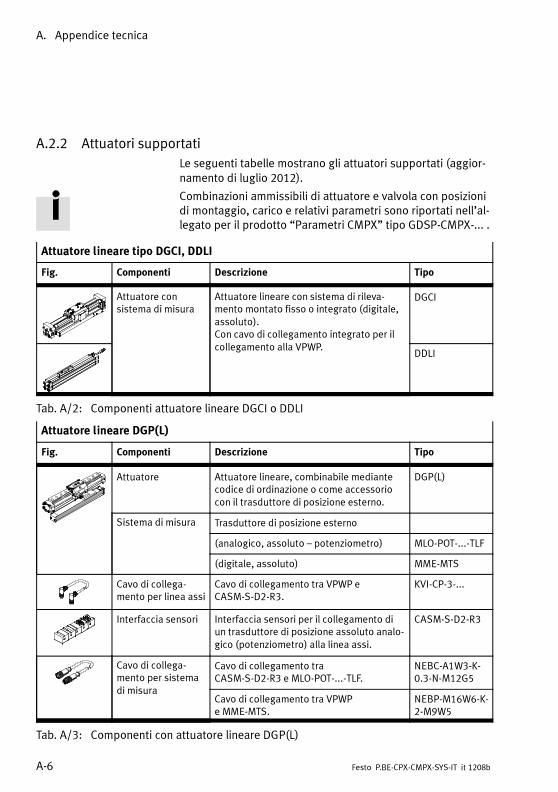
A. Appendice tecnica
A-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
A.2.2 Attuatori supportati
Le seguenti tabelle mostrano gli attuatori supportati (aggior-namento di luglio 2012).
Combinazioni ammissibili di attuatore e valvola con posizionidi montaggio, carico e relativi parametri sono riportati nell’al-legato per il prodotto “Parametri CMPX” tipo GDSP-CMPX-... .
Attuatore lineare tipo DGCI, DDLI
Fig. Componenti Descrizione Tipo
Attuatore consistema di misura
Attuatore lineare con sistema di rileva-mento montato fisso o integrato (digitale,assoluto).Con cavo di collegamento integrato per ilcollegamento alla VPWP.
DGCI
DDLI
Tab. A/2: Componenti attuatore lineare DGCI o DDLI
Attuatore lineare DGP(L)
Fig. Componenti Descrizione Tipo
Attuatore Attuatore lineare, combinabile mediantecodice di ordinazione o come accessoriocon il trasduttore di posizione esterno.
DGP(L)
Sistema di misura Trasduttore di posizione esterno
(analogico, assoluto – potenziometro) MLO-POT-...-TLF
(digitale, assoluto) MME-MTS
Cavo di collega-mento per linea assi
Cavo di collegamento tra VPWP eCASM-S-D2-R3.
KVI-CP-3-...
Interfaccia sensori Interfaccia sensori per il collegamento diun trasduttore di posizione assoluto analo-gico (potenziometro) alla linea assi.
CASM-S-D2-R3
Cavo di collega-mento per sistemadi misura
Cavo di collegamento traCASM-S-D2-R3 e MLO-POT-...-TLF.
NEBC-A1W3-K-0.3-N-M12G5
Cavo di collegamento tra VPWPe MME-MTS.
NEBP-M16W6-K-2-M9W5
Tab. A/3: Componenti con attuatore lineare DGP(L)
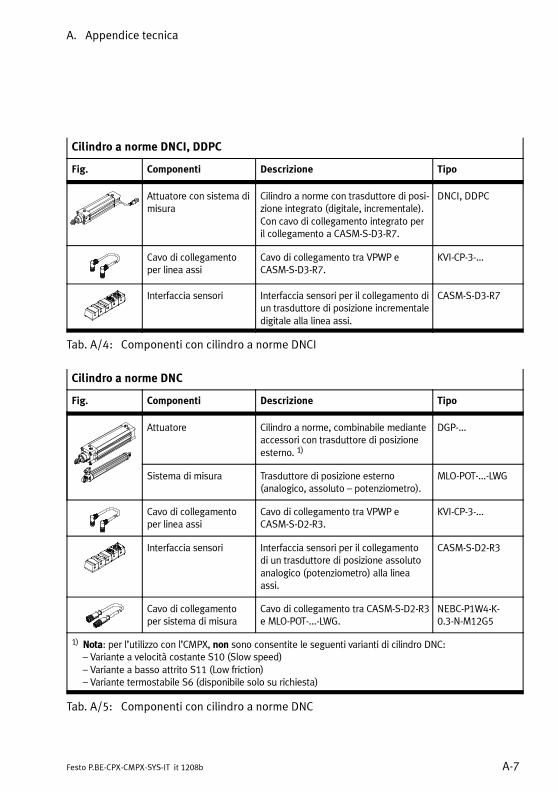
A. Appendice tecnica
A-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Cilindro a norme DNCI, DDPC
Fig. Componenti Descrizione Tipo
Attuatore con sistema dimisura
Cilindro a norme con trasduttore di posi-zione integrato (digitale, incrementale).Con cavo di collegamento integrato peril collegamento a CASM-S-D3-R7.
DNCI, DDPC
Cavo di collegamentoper linea assi
Cavo di collegamento tra VPWP eCASM-S-D3-R7.
KVI-CP-3-...
Interfaccia sensori Interfaccia sensori per il collegamento diun trasduttore di posizione incrementaledigitale alla linea assi.
CASM-S-D3-R7
Tab. A/4: Componenti con cilindro a norme DNCI
Cilindro a norme DNC
Fig. Componenti Descrizione Tipo
Attuatore Cilindro a norme, combinabile medianteaccessori con trasduttore di posizioneesterno. 1)
DGP-...
Sistema di misura Trasduttore di posizione esterno(analogico, assoluto – potenziometro).
MLO-POT-...-LWG
Cavo di collegamentoper linea assi
Cavo di collegamento tra VPWP eCASM-S-D2-R3.
KVI-CP-3-...
Interfaccia sensori Interfaccia sensori per il collegamentodi un trasduttore di posizione assolutoanalogico (potenziometro) alla lineaassi.
CASM-S-D2-R3
Cavo di collegamentoper sistema di misura
Cavo di collegamento tra CASM-S-D2-R3e MLO-POT-...-LWG.
NEBC-P1W4-K-0.3-N-M12G5
1) Nota: per l’utilizzo con l’CMPX, non sono consentite le seguenti varianti di cilindro DNC:– Variante a velocità costante S10 (Slow speed)– Variante a basso attrito S11 (Low friction)– Variante termostabile S6 (disponibile solo su richiesta)
Tab. A/5: Componenti con cilindro a norme DNC
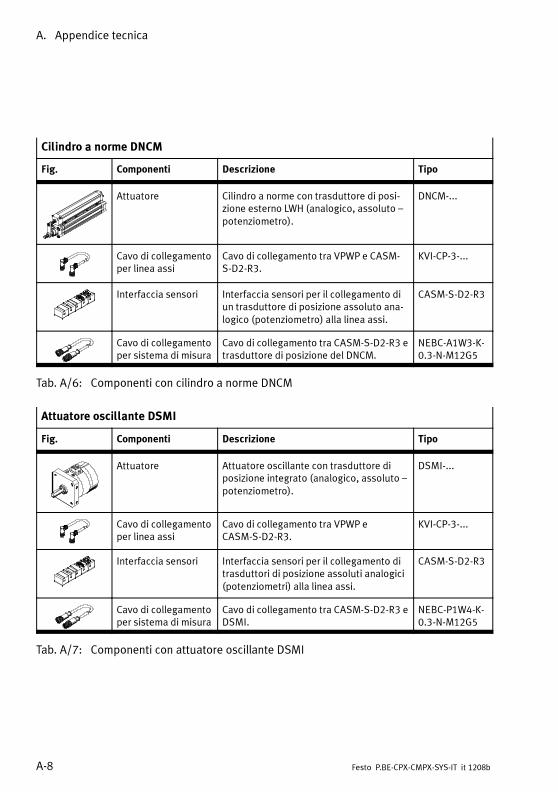
A. Appendice tecnica
A-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Cilindro a norme DNCM
Fig. Componenti Descrizione Tipo
Attuatore Cilindro a norme con trasduttore di posi-zione esterno LWH (analogico, assoluto –potenziometro).
DNCM-...
Cavo di collegamentoper linea assi
Cavo di collegamento tra VPWP e CASM-S-D2-R3.
KVI-CP-3-...
Interfaccia sensori Interfaccia sensori per il collegamento diun trasduttore di posizione assoluto ana-logico (potenziometro) alla linea assi.
CASM-S-D2-R3
Cavo di collegamentoper sistema di misura
Cavo di collegamento tra CASM-S-D2-R3 etrasduttore di posizione del DNCM.
NEBC-A1W3-K-0.3-N-M12G5
Tab. A/6: Componenti con cilindro a norme DNCM
Attuatore oscillante DSMI
Fig. Componenti Descrizione Tipo
Attuatore Attuatore oscillante con trasduttore diposizione integrato (analogico, assoluto –potenziometro).
DSMI-...
Cavo di collegamentoper linea assi
Cavo di collegamento tra VPWP eCASM-S-D2-R3.
KVI-CP-3-...
Interfaccia sensori Interfaccia sensori per il collegamento ditrasduttori di posizione assoluti analogici(potenziometri) alla linea assi.
CASM-S-D2-R3
Cavo di collegamentoper sistema di misura
Cavo di collegamento tra CASM-S-D2-R3 eDSMI.
NEBC-P1W4-K-0.3-N-M12G5
Tab. A/7: Componenti con attuatore oscillante DSMI

A. Appendice tecnica
A-9Festo P.BE-CPX-CMPX-SYS-IT it 1208b
A.3 Sostituzione di componenti
Attenersi alle indicazioni della Tab. A/8 per sostituire i compo-nenti.
Sostituzione Descrizione
... di un CMPX o delterminale CPX
• Parametrizzazione:I parametri del CMPX devono essere impostati di nuovo.Questa operazione può essere eseguita manualmente oppure inmodo automatico mediante il master bus, quando i parametrisono stati eseguiti nel master o nel programma di configurazione,vedi appendice B.
• Procedura di teach-in:I finecorsa Pos1 e Pos2 dipendono dai singoli componenti e nonpossono essere parametrizzati. In caso di sostituzione è quindinecessario eseguire sempre la procedura di teach-in.
• Posizioni intermedie:Le posizioni intermedie Pos3 e Pos4 devono essere “apprese” dinuovo. Se non vengono sostituiti l’attuatore e il sistema di misuraè eventualmente possibile parametrizzare le posizioni intermediePos3 e Pos.4, cfr. parametrizzazione.
... di attuatore, sistema dimisura o VPWP e modifichealla tubazione.
• Parametrizzazione:La parametrizzazione rimane invariata in caso di sostituzione dicomponenti identici.
• Procedura di teach-in:Le caratteristiche specifiche dell’attuatore, del sistema di misurao della valvola collegati non sono parametri. In seguito a unasostituzione è quindi necessario ripetere la procedura di teach-in.In linea generale si raccomanda di farlo anche dopo che sonostate apportate modifiche alla tubazione!
• Posizioni intermedie:Le posizioni intermedie 3 e 4 possono essere parametrizzateautomaticamente dal nodo bus master.Tenere tuttavia presente che il sistema di riferimento può cam-biare a causa della sostituzione dell’attuatore o del sistema dimisura!
... altri componenti È possibile sostituire componenti elettrici identici senza modifiche.
Tab. A/8: Sostituzione di componenti
A. Appendice tecnica
A-10 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
A.4 Collegamenti pneumatici supplementari
Per portare il sistema in uno stato specifico in determinaticasi di impiego, sono necessari determinati collegamentipneumatici supplementari.
NotaQuando si disinserisce la tensione d’esercizio del CMPX, lavalvola proporzionale di controllo portata VPWP assume laposizione centrale. In caso di pressione di alimentazioneinserita può verificarsi che, per effetto dell’asimmetriadella curva caratteristica pressione/tensione della valvolaproporzionale di controllo portata, l’attuatore si spostilentamente verso uno dei finecorsa.
Altre informazioni
L’opuscolo “Guida alla tecnica di sicurezza” (“Guide To SafetyTechnology”) contiene informazioni dettagliate sui seguentiargomenti:
– Direttive e norme
– Direttiva macchine e EN ISO 13849-1
– Termine “rischio” e definizione
– Valutazione del rischio
– Procedura conforme alle direttive per la costruzionesicura (ai sensi della EN ISO 12100)
– Architettura dei sistemi di comando (ai sensi dellaEN ISO 13849-1)
– Modi operativi e funzioni di sicurezza
– Esempi di schema
– Prodotti Festo
– Assistenza
Si può richiedere l’opuscolo “Guida alla tecnica di sicurezza”(“Guide To Safety Technology”):� www.festo.com

Configurazione con nodo bus CPX o CPX-FEC
B-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Appendice B
Configurazione con nodo bus CPX o CPX-FEC

B. Configurazione con nodo bus CPX o CPX-FEC
B-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice generale
B.1 CPX-FEC B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Configurazione B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.2 Parametrizzazione del CMPX B-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Memorizzazione della configurazione realecome configurazione nominale B-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.4 Occupazione degli indirizzi B-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.5 Diagnosi B-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 CPX-FB13 (PROFIBUS-DP) B-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.1 Informazioni generali per la configurazione B-14. . . . . . . . . . . . . . . . . . .
B.2.2 Configurazione con STEP 7 B-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.3 Parametrizzazione B-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.4 Indirizzamento B-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 CPX-FB11 (DeviceNet) B-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.1 Configurazione delle caratteristiche degli utenti DeviceNet (EDS) B-24.
B.3.2 Parametrizzazione (esempio RSNetworx) B-26. . . . . . . . . . . . . . . . . . . .
B.3.3 Indirizzamento B-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B. Configurazione con nodo bus CPX o CPX-FEC
B-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.1 CPX-FEC
Per informazioni generali sulla configurazione con SFT consul-tare la descrizione del CPX-FEC (tipo P.BE-CPX-FEC-...). Perinformazioni particolareggiate relative all’impiego del soft-ware FST consultare il manuale FST (tipo P.BE-FST-..).
B.1.1 Configurazione
Per configurare il terminale CPX con CPX-FEC, utilizzarei Festo Software Tool (FST 4.1 o superiore) con il configura-tore hardware.
Per la configurazione del CMPX, questo deve essere conte-nuto nel catalogo del configuratore CPX (terminale CPX/Moduli tecnologici / CPX-CMPX...). È possibile che sia neces-sario un aggiornamento del software FST (CPX configurationupdate):
– � www.festo.com� Downloads� Immettere il terminedi ricerca: FST
AttenzioneSe un terminale CPX da configurare è collegato con il PC:testare progetti e programmi, prima senza attuatori attivio aria compressa.Così si evitano danni durante la fase di test.
Moduli I/O/Configurazione CPX
Per realizzare la configurazione esistono sempre le seguentimodalità:
– Comparazione fra nominale-reale nel modo editor
– Passaggio al modo operativo per esercizio On-line
– Configurazione manuale con il configuratore hardware

B. Configurazione con nodo bus CPX o CPX-FEC
B-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Le prime due modalità richiedono il collegamento e ladisponibilità all’esercizio del terminale CPX. La configurazionehardware con il CMPX viene identificata automaticamente.
Con la configurazione manuale è possibile configurare ilCMPX senza collegarlo al terminale CPX, almeno nella faseiniziale.
12
1 Configurazione con “drag & drop” 2 Moduli configurati nella tabella diconfigurazione
Fig. B/1: Configurazione manuale del terminale CPX nel configuratore hardware
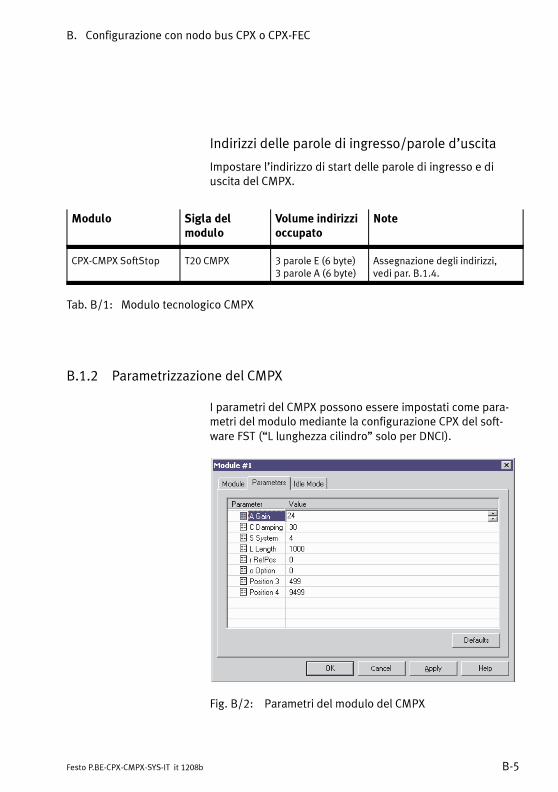
B. Configurazione con nodo bus CPX o CPX-FEC
B-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indirizzi delle parole di ingresso/parole d’uscita
Impostare l’indirizzo di start delle parole di ingresso e diuscita del CMPX.
Modulo Sigla delmodulo
Volume indirizzioccupato
Note
CPX-CMPX SoftStop T20 CMPX 3 parole E (6 byte)3 parole A (6 byte)
Assegnazione degli indirizzi,vedi par. B.1.4.
Tab. B/1: Modulo tecnologico CMPX
B.1.2 Parametrizzazione del CMPX
I parametri del CMPX possono essere impostati come para-metri del modulo mediante la configurazione CPX del soft-ware FST (“L lunghezza cilindro” solo per DNCI).
Fig. B/2: Parametri del modulo del CMPX
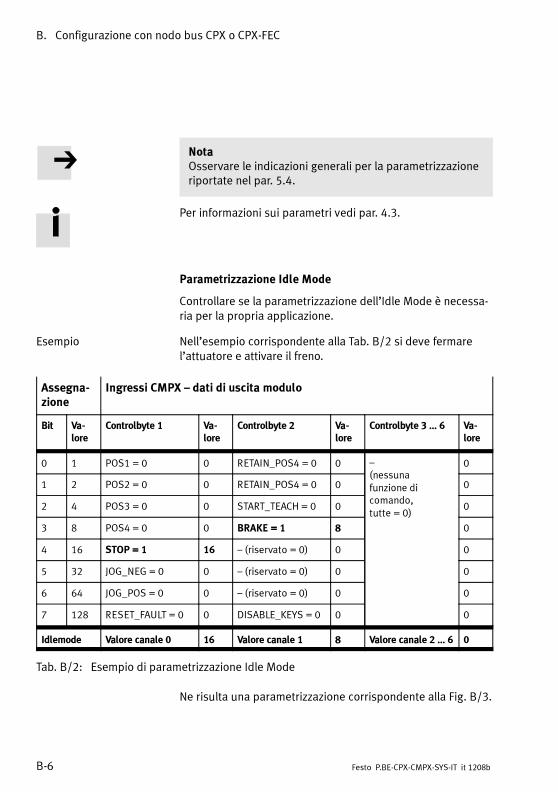
B. Configurazione con nodo bus CPX o CPX-FEC
B-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
NotaOsservare le indicazioni generali per la parametrizzazioneriportate nel par. 5.4.
Per informazioni sui parametri vedi par. 4.3.
Parametrizzazione Idle Mode
Controllare se la parametrizzazione dell’Idle Mode è necessa-ria per la propria applicazione.
Esempio Nell’esempio corrispondente alla Tab. B/2 si deve fermarel’attuatore e attivare il freno.
Assegna-zione
Ingressi CMPX – dati di uscita modulo
Bit Va-lore
Controlbyte 1 Va-lore
Controlbyte 2 Va-lore
Controlbyte 3 ... 6 Va-lore
0 1 POS1 = 0 0 RETAIN_POS4 = 0 0 –(nessunafunzione dicomando,tutte = 0)
0
1 2 POS2 = 0 0 RETAIN_POS4 = 0 0 0
2 4 POS3 = 0 0 START_TEACH = 0 0 0
3 8 POS4 = 0 0 BRAKE = 1 8 0
4 16 STOP = 1 16 – (riservato = 0) 0 0
5 32 JOG_NEG = 0 0 – (riservato = 0) 0 0
6 64 JOG_POS = 0 0 – (riservato = 0) 0 0
7 128 RESET_FAULT = 0 0 DISABLE_KEYS = 0 0 0
Idlemode Valore canale 0 16 Valore canale 1 8 Valore canale 2 ... 6 0
Tab. B/2: Esempio di parametrizzazione Idle Mode
Ne risulta una parametrizzazione corrispondente alla Fig. B/3.
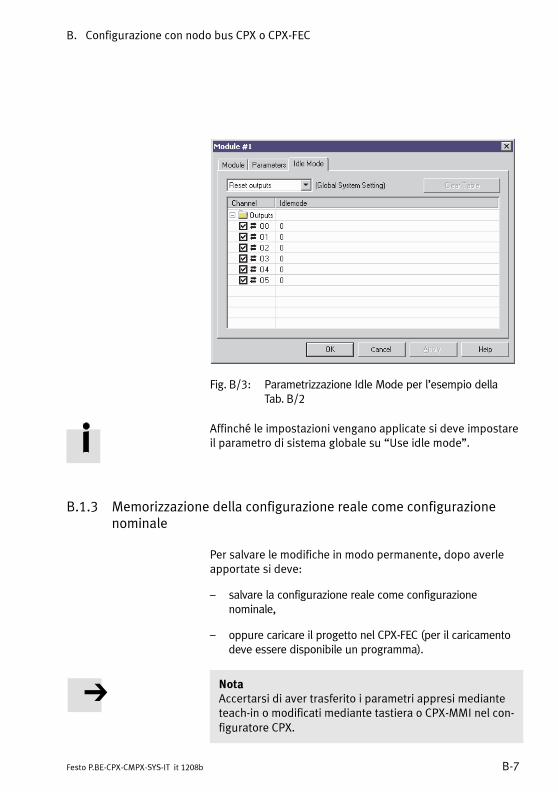
B. Configurazione con nodo bus CPX o CPX-FEC
B-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Fig. B/3: Parametrizzazione Idle Mode per l’esempio dellaTab. B/2
Affinché le impostazioni vengano applicate si deve impostareil parametro di sistema globale su “Use idle mode”.
B.1.3 Memorizzazione della configurazione reale come configurazionenominale
Per salvare le modifiche in modo permanente, dopo averleapportate si deve:
– salvare la configurazione reale come configurazionenominale,
– oppure caricare il progetto nel CPX-FEC (per il caricamentodeve essere disponibile un programma).
NotaAccertarsi di aver trasferito i parametri appresi medianteteach-in o modificati mediante tastiera o CPX-MMI nel con-figuratore CPX.
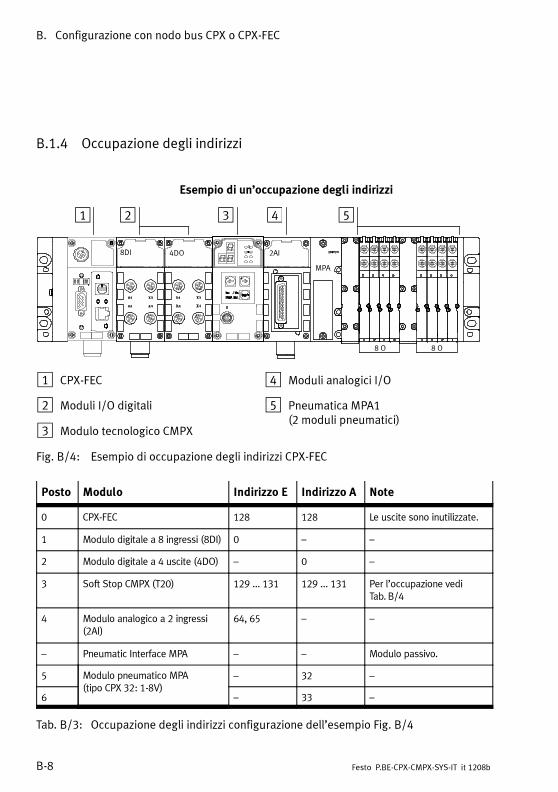
B. Configurazione con nodo bus CPX o CPX-FEC
B-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.1.4 Occupazione degli indirizzi
Esempio di un’occupazione degli indirizzi
8DI 2AI4DO
8 O 8 O
1
MPA
2 4 53
1 CPX-FEC
2 Moduli I/O digitali
3 Modulo tecnologico CMPX
4 Moduli analogici I/O
5 Pneumatica MPA1(2 moduli pneumatici)
Fig. B/4: Esempio di occupazione degli indirizzi CPX-FEC
Posto Modulo Indirizzo E Indirizzo A Note
0 CPX-FEC 128 128 Le uscite sono inutilizzate.
1 Modulo digitale a 8 ingressi (8DI) 0 – –
2 Modulo digitale a 4 uscite (4DO) – 0 –
3 Soft Stop CMPX (T20) 129 ... 131 129 ... 131 Per l’occupazione vediTab. B/4
4 Modulo analogico a 2 ingressi(2AI)
64, 65 – –
– Pneumatic Interface MPA – – Modulo passivo.
5 Modulo pneumatico MPA(tipo CPX 32: 1-8V)
– 32 –
6 – 33 –
Tab. B/3: Occupazione degli indirizzi configurazione dell’esempio Fig. B/4
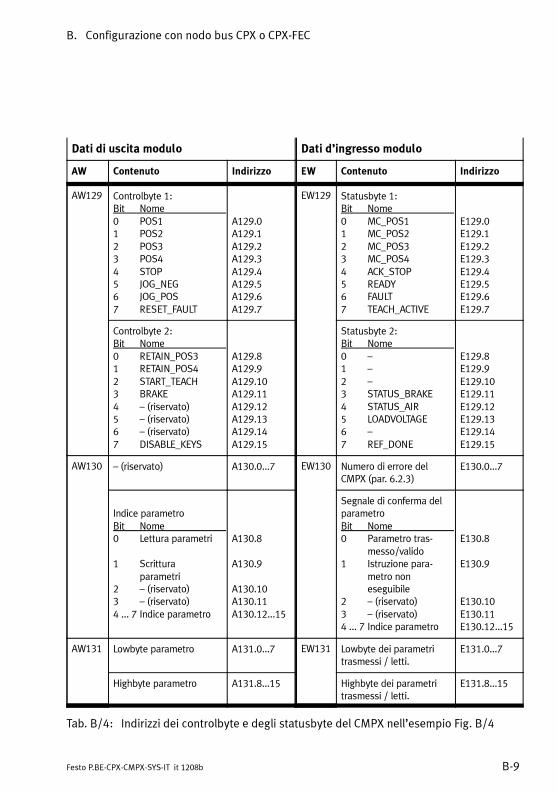
B. Configurazione con nodo bus CPX o CPX-FEC
B-9Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Dati di uscita modulo Dati d’ingresso modulo
AW Contenuto Indirizzo EW Contenuto Indirizzo
AW129 Controlbyte 1:Bit Nome0 POS11 POS22 POS33 POS44 STOP5 JOG_NEG6 JOG_POS7 RESET_FAULT
A129.0A129.1A129.2A129.3A129.4A129.5A129.6A129.7
EW129 Statusbyte 1:Bit Nome0 MC_POS11 MC_POS22 MC_POS33 MC_POS44 ACK_STOP5 READY6 FAULT7 TEACH_ACTIVE
E129.0E129.1E129.2E129.3E129.4E129.5E129.6E129.7
Controlbyte 2:Bit Nome0 RETAIN_POS31 RETAIN_POS42 START_TEACH3 BRAKE4 – (riservato)5 – (riservato)6 – (riservato)7 DISABLE_KEYS
A129.8A129.9A129.10A129.11A129.12A129.13A129.14A129.15
Statusbyte 2:Bit Nome0 –1 –2 –3 STATUS_BRAKE4 STATUS_AIR5 LOADVOLTAGE6 –7 REF_DONE
E129.8E129.9E129.10E129.11E129.12E129.13E129.14E129.15
AW130 – (riservato) A130.0...7 EW130 Numero di errore delCMPX (par. 6.2.3)
E130.0...7
Indice parametroBit Nome0 Lettura parametri
1 Scritturaparametri
2 – (riservato)3 – (riservato)4 ... 7 Indice parametro
A130.8
A130.9
A130.10A130.11A130.12...15
Segnale di conferma delparametroBit Nome0 Parametro tras-
messo/valido1 Istruzione para-
metro noneseguibile
2 – (riservato)3 – (riservato)4 ... 7 Indice parametro
E130.8
E130.9
E130.10E130.11E130.12...15
AW131 Lowbyte parametro A131.0...7 EW131 Lowbyte dei parametritrasmessi / letti.
E131.0...7
Highbyte parametro A131.8...15 Highbyte dei parametritrasmessi / letti.
E131.8...15
Tab. B/4: Indirizzi dei controlbyte e degli statusbyte del CMPX nell’esempio Fig. B/4
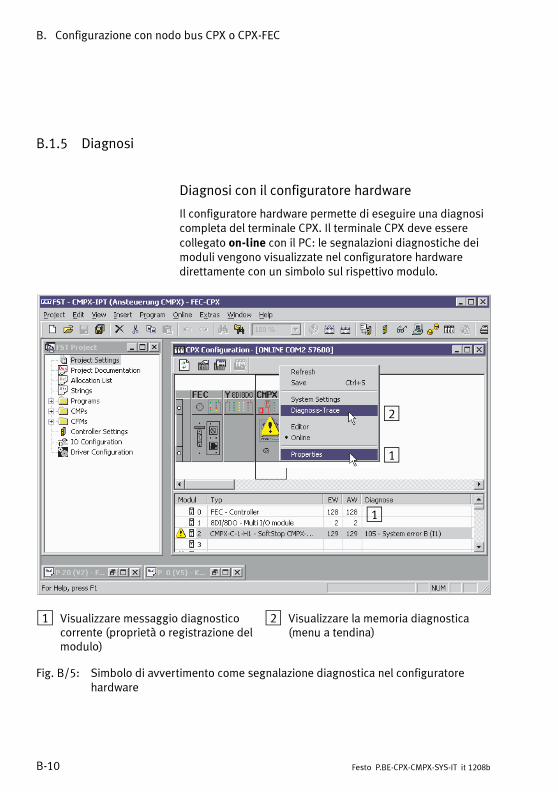
B. Configurazione con nodo bus CPX o CPX-FEC
B-10 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.1.5 Diagnosi
Diagnosi con il configuratore hardware
Il configuratore hardware permette di eseguire una diagnosicompleta del terminale CPX. Il terminale CPX deve esserecollegato on-line con il PC: le segnalazioni diagnostiche deimoduli vengono visualizzate nel configuratore hardwaredirettamente con un simbolo sul rispettivo modulo.
1
2
1
1 Visualizzare messaggio diagnosticocorrente (proprietà o registrazione delmodulo)
2 Visualizzare la memoria diagnostica(menu a tendina)
Fig. B/5: Simbolo di avvertimento come segnalazione diagnostica nel configuratorehardware

B. Configurazione con nodo bus CPX o CPX-FEC
B-11Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Visualizzazione della segnalazione diagnostica corrente
• Segnalazione diagnostica nel configuratore hardware.
• Attivare la visualizzazione della finestra di dialogo“Module...”, scheda “Diagnosis”, facendo un doppioclic o selezionandola dal menu a tendina [Properties].
Fig. B/6: Segnalazione diagnostica nella finestra Properties
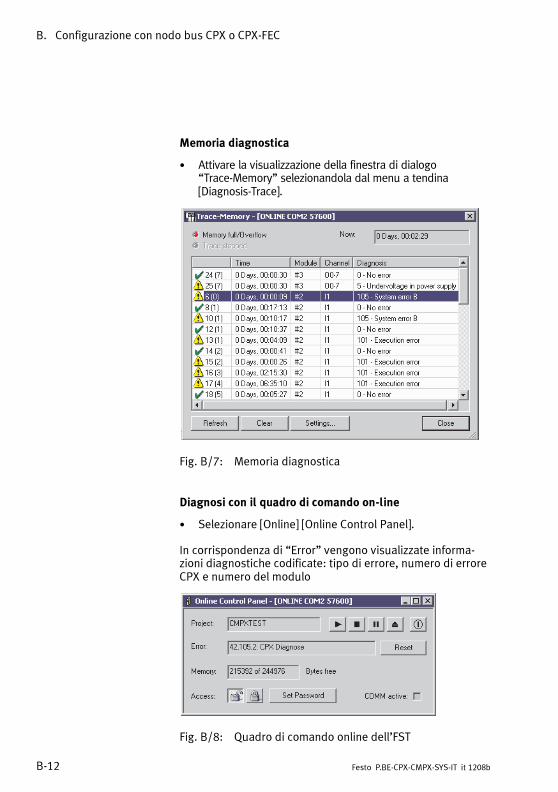
B. Configurazione con nodo bus CPX o CPX-FEC
B-12 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Memoria diagnostica
• Attivare la visualizzazione della finestra di dialogo“Trace-Memory” selezionandola dal menu a tendina[Diagnosis-Trace].
Fig. B/7: Memoria diagnostica
Diagnosi con il quadro di comando on-line
• Selezionare [Online] [Online Control Panel].
In corrispondenza di “Error” vengono visualizzate informa-zioni diagnostiche codificate: tipo di errore, numero di erroreCPX e numero del modulo
Fig. B/8: Quadro di comando online dell’FST
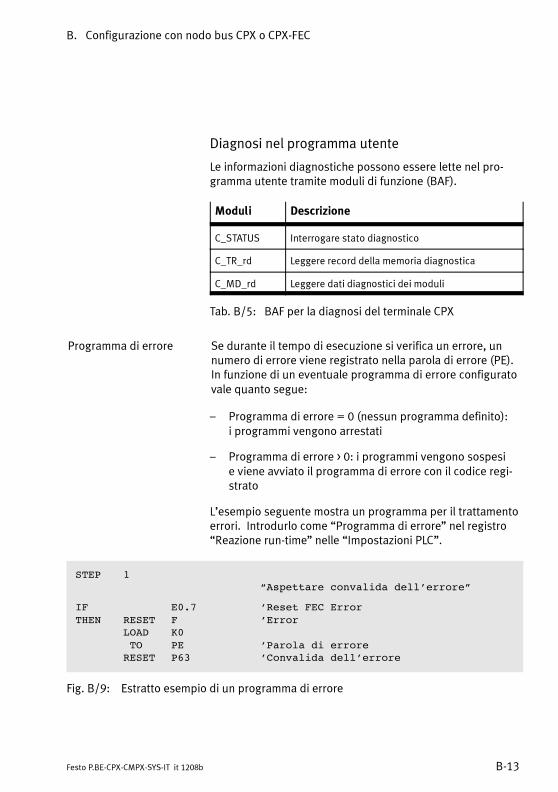
B. Configurazione con nodo bus CPX o CPX-FEC
B-13Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Diagnosi nel programma utente
Le informazioni diagnostiche possono essere lette nel pro-gramma utente tramite moduli di funzione (BAF).
Moduli Descrizione
C_STATUS Interrogare stato diagnostico
C_TR_rd Leggere record della memoria diagnostica
C_MD_rd Leggere dati diagnostici dei moduli
Tab. B/5: BAF per la diagnosi del terminale CPX
Programma di errore Se durante il tempo di esecuzione si verifica un errore, unnumero di errore viene registrato nella parola di errore (PE).In funzione di un eventuale programma di errore configuratovale quanto segue:
– Programma di errore = 0 (nessun programma definito):i programmi vengono arrestati
– Programma di errore > 0: i programmi vengono sospesie viene avviato il programma di errore con il codice regi-strato
L’esempio seguente mostra un programma per il trattamentoerrori. Introdurlo come “Programma di errore” nel registro“Reazione run-time” nelle “Impostazioni PLC”.
STEP 1
“Aspettare convalida dell’errore”
IF E0.7 ’Reset FEC Error
THEN RESET F ’Error
LOAD K0
TO PE ’Parola di errore
RESET P63 ’Convalida dell’errore
Fig. B/9: Estratto esempio di un programma di errore
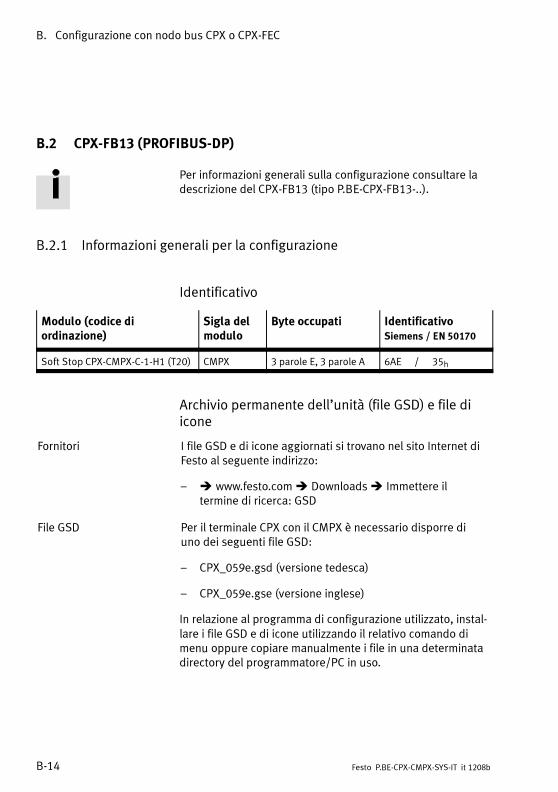
B. Configurazione con nodo bus CPX o CPX-FEC
B-14 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.2 CPX-FB13 (PROFIBUS-DP)
Per informazioni generali sulla configurazione consultare ladescrizione del CPX-FB13 (tipo P.BE-CPX-FB13-..).
B.2.1 Informazioni generali per la configurazione
Identificativo
Modulo (codice diordinazione)
Sigla delmodulo
Byte occupati IdentificativoSiemens / EN 50170
Soft Stop CPX-CMPX-C-1-H1 (T20) CMPX 3 parole E, 3 parole A 6AE / 35h
Archivio permanente dell’unità (file GSD) e file diicone
Fornitori I file GSD e di icone aggiornati si trovano nel sito Internet diFesto al seguente indirizzo:
– � www.festo.com� Downloads� Immettere iltermine di ricerca: GSD
File GSD Per il terminale CPX con il CMPX è necessario disporre diuno dei seguenti file GSD:
– CPX_059e.gsd (versione tedesca)
– CPX_059e.gse (versione inglese)
In relazione al programma di configurazione utilizzato, instal-lare i file GSD e di icone utilizzando il relativo comando dimenu oppure copiare manualmente i file in una determinatadirectory del programmatore/PC in uso.
B. Configurazione con nodo bus CPX o CPX-FEC
B-15Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Parametrizzazione
A causa della parametrizzazione iniziale è necessaria partico-lare cautela nella gestione dei parametri. Osservare le indica-zioni riportate nel par. B.2.3.
B.2.2 Configurazione con STEP 7
La descrizione che segue fa riferimento alla versionesoftware V 5.3.
Prima di procedere alla configurazione, è necessario avere instal-lato un archivio permanente dell’unità corrispondente (file GSD).
Per la configurazione procedere nel modo seguente (vediFig. B/10):
1. Inserire un sistema master DP1 e il terminale CPX2secondo la descrizione di CPX-FB13.
2. Inserire i moduli del sistema CPX nella tabella di configura-zione.All’interno del catalogo hardware aprire il modulo “FestoCPX-Terminal” (cartella \PROFIBUS DP\Additional FieldDevices\Valves\...).3 .Per il CMPX sono possibili due registrazioni:
Registrazione Descrizione
CPX-CMPX-C-1-H1 [6DI/6DO] CMPX con 6 byte I / 6 byte O, senza parametri Fail Safe(occupa 21 byte di dati di parametrizzazione) 1)
CPX-CMPX-C-1-H1 [6DI/6DO Fails.] CMPX con 6 byte I / 6 byte O, con parametri Fail Safe(occupa 29 byte di dati di parametrizzazione) 1)
1) Il numero massimo dei dati di parametrizzazione del terminale CPX è limitato a 234 byte.
3. Assegnare rispettivamente l’indirizzo iniziale nella finestra“Properties - DP-Slave”4.
In tal modo sono concluse la selezione della stazione e laconfigurazione.
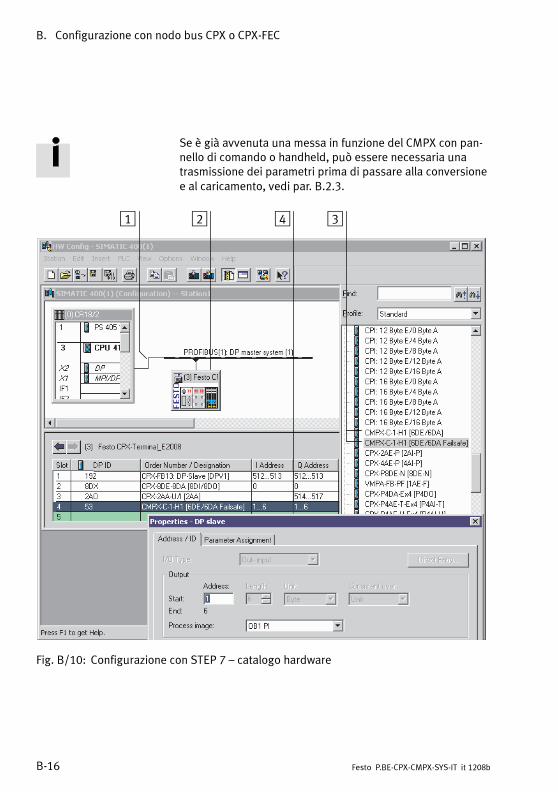
B. Configurazione con nodo bus CPX o CPX-FEC
B-16 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Se è già avvenuta una messa in funzione del CMPX con pan-nello di comando o handheld, può essere necessaria unatrasmissione dei parametri prima di passare alla conversionee al caricamento, vedi par. B.2.3.
1 2 34
Fig. B/10: Configurazione con STEP 7 – catalogo hardware
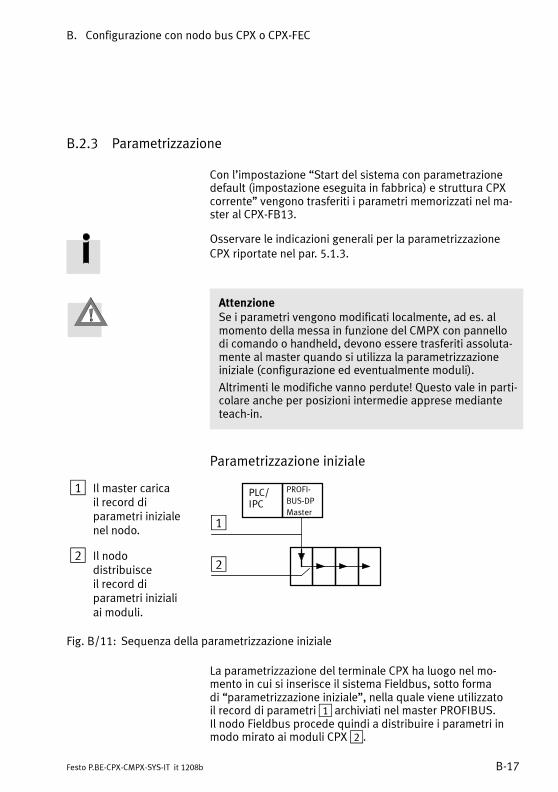
B. Configurazione con nodo bus CPX o CPX-FEC
B-17Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.2.3 Parametrizzazione
Con l’impostazione “Start del sistema con parametrazionedefault (impostazione eseguita in fabbrica) e struttura CPXcorrente” vengono trasferiti i parametri memorizzati nel ma-ster al CPX-FB13.
Osservare le indicazioni generali per la parametrizzazioneCPX riportate nel par. 5.1.3.
AttenzioneSe i parametri vengono modificati localmente, ad es. almomento della messa in funzione del CMPX con pannellodi comando o handheld, devono essere trasferiti assoluta-mente al master quando si utilizza la parametrizzazioneiniziale (configurazione ed eventualmente moduli).
Altrimenti le modifiche vanno perdute! Questo vale in parti-colare anche per posizioni intermedie apprese medianteteach-in.
Parametrizzazione iniziale
1 Il master caricail record diparametri inizialenel nodo.
2 Il nododistribuisceil record diparametri inizialiai moduli.
PLC/IPC
PROFI-
BUS-DP
Master
1
2
Fig. B/11: Sequenza della parametrizzazione iniziale
La parametrizzazione del terminale CPX ha luogo nel mo-mento in cui si inserisce il sistema Fieldbus, sotto formadi “parametrizzazione iniziale”, nella quale viene utilizzatoil record di parametri1 archiviati nel master PROFIBUS.Il nodo Fieldbus procede quindi a distribuire i parametri inmodo mirato ai moduli CPX2.
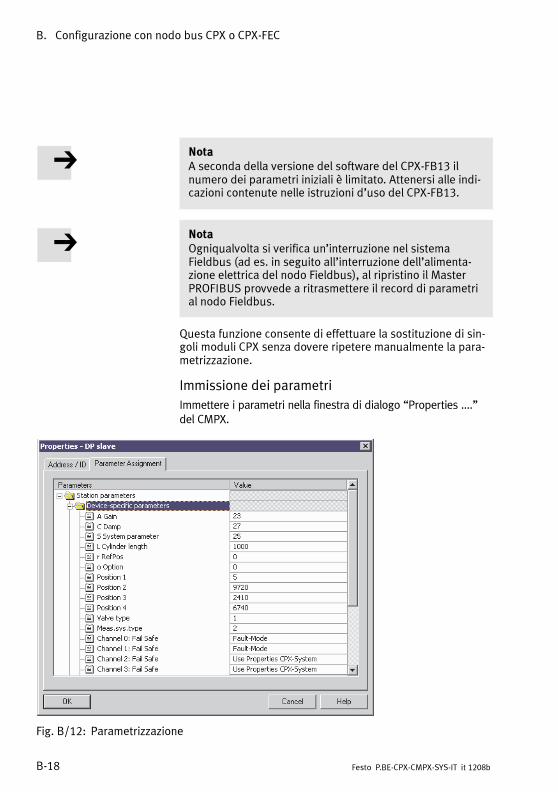
B. Configurazione con nodo bus CPX o CPX-FEC
B-18 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
NotaA seconda della versione del software del CPX-FB13 ilnumero dei parametri iniziali è limitato. Attenersi alle indi-cazioni contenute nelle istruzioni d’uso del CPX-FB13.
NotaOgniqualvolta si verifica un’interruzione nel sistemaFieldbus (ad es. in seguito all’interruzione dell’alimenta-zione elettrica del nodo Fieldbus), al ripristino il MasterPROFIBUS provvede a ritrasmettere il record di parametrial nodo Fieldbus.
Questa funzione consente di effettuare la sostituzione di sin-goli moduli CPX senza dovere ripetere manualmente la para-metrizzazione.
Immissione dei parametri
Immettere i parametri nella finestra di dialogo “Properties ....”del CMPX.
Fig. B/12: Parametrizzazione
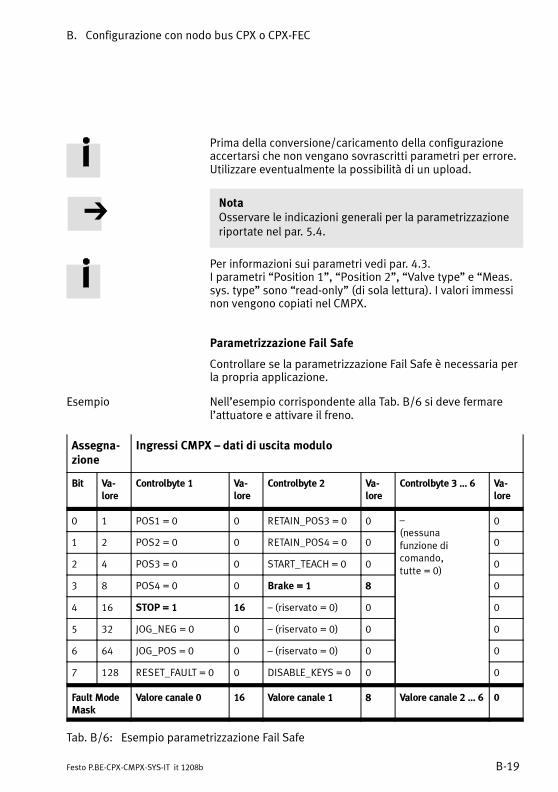
B. Configurazione con nodo bus CPX o CPX-FEC
B-19Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Prima della conversione/caricamento della configurazioneaccertarsi che non vengano sovrascritti parametri per errore.Utilizzare eventualmente la possibilità di un upload.
NotaOsservare le indicazioni generali per la parametrizzazioneriportate nel par. 5.4.
Per informazioni sui parametri vedi par. 4.3.I parametri “Position 1”, “Position 2”, “Valve type” e “Meas.sys. type” sono “read-only” (di sola lettura). I valori immessinon vengono copiati nel CMPX.
Parametrizzazione Fail Safe
Controllare se la parametrizzazione Fail Safe è necessaria perla propria applicazione.
Esempio Nell’esempio corrispondente alla Tab. B/6 si deve fermarel’attuatore e attivare il freno.
Assegna-zione
Ingressi CMPX – dati di uscita modulo
Bit Va-lore
Controlbyte 1 Va-lore
Controlbyte 2 Va-lore
Controlbyte 3 ... 6 Va-lore
0 1 POS1 = 0 0 RETAIN_POS3 = 0 0 –(nessunafunzione dicomando,tutte = 0)
0
1 2 POS2 = 0 0 RETAIN_POS4 = 0 0 0
2 4 POS3 = 0 0 START_TEACH = 0 0 0
3 8 POS4 = 0 0 Brake = 1 8 0
4 16 STOP = 1 16 – (riservato = 0) 0 0
5 32 JOG_NEG = 0 0 – (riservato = 0) 0 0
6 64 JOG_POS = 0 0 – (riservato = 0) 0 0
7 128 RESET_FAULT = 0 0 DISABLE_KEYS = 0 0 0
Fault ModeMask
Valore canale 0 16 Valore canale 1 8 Valore canale 2 ... 6 0
Tab. B/6: Esempio parametrizzazione Fail Safe
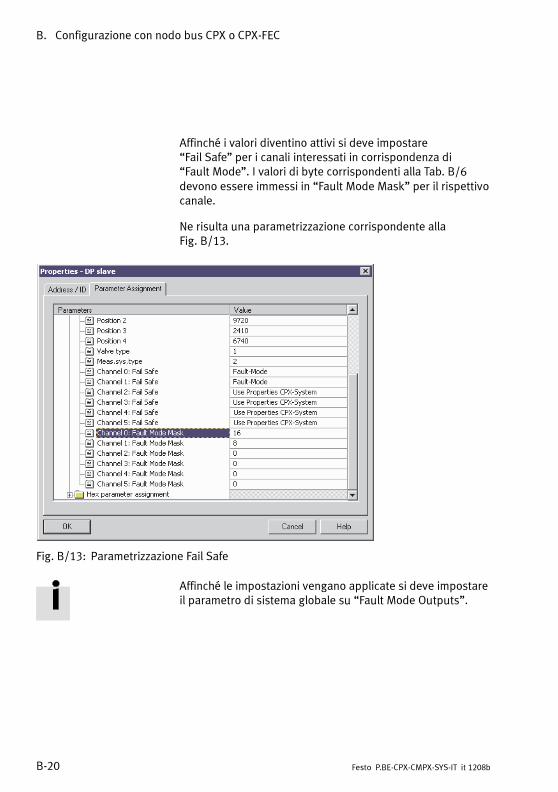
B. Configurazione con nodo bus CPX o CPX-FEC
B-20 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Affinché i valori diventino attivi si deve impostare“Fail Safe” per i canali interessati in corrispondenza di“Fault Mode”. I valori di byte corrispondenti alla Tab. B/6devono essere immessi in “Fault Mode Mask” per il rispettivocanale.
Ne risulta una parametrizzazione corrispondente allaFig. B/13.
Fig. B/13: Parametrizzazione Fail Safe
Affinché le impostazioni vengano applicate si deve impostareil parametro di sistema globale su “Fault Mode Outputs”.
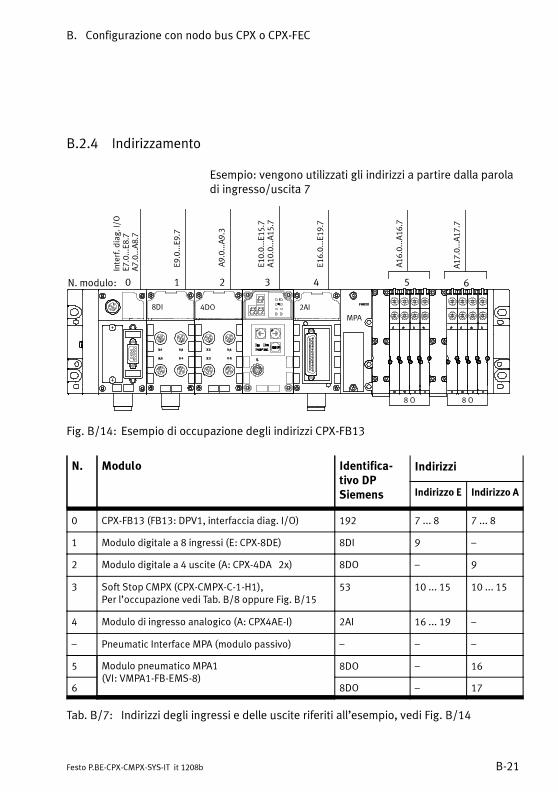
B. Configurazione con nodo bus CPX o CPX-FEC
B-21Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.2.4 Indirizzamento
Esempio: vengono utilizzati gli indirizzi a partire dalla paroladi ingresso/uscita 7
8DI 2AI4DO
8 O 8 O
MPA
1 2 3 4 5 6N. modulo: 0
Interf.diag.I/O
E7.0...E8.7
A7.0...A8.7
E9.0...E9.7
A9.0...A9.3
E10.0...E15.7
A10.0...A15.7
E16.0...E19.7
A16.0...A16.7
A17.0...A17.7
Fig. B/14: Esempio di occupazione degli indirizzi CPX-FB13
N. Modulo Identifica-tivo DPSiemens
Indirizzi
Indirizzo E Indirizzo A
0 CPX-FB13 (FB13: DPV1, interfaccia diag. I/O) 192 7 ... 8 7 ... 8
1 Modulo digitale a 8 ingressi (E: CPX-8DE) 8DI 9 –
2 Modulo digitale a 4 uscite (A: CPX-4DA 2x) 8DO – 9
3 Soft Stop CMPX (CPX-CMPX-C-1-H1),Per l’occupazione vedi Tab. B/8 oppure Fig. B/15
53 10 ... 15 10 ... 15
4 Modulo di ingresso analogico (A: CPX4AE-I) 2AI 16 ... 19 –
– Pneumatic Interface MPA (modulo passivo) – – –
5 Modulo pneumatico MPA1(VI: VMPA1-FB-EMS-8)
8DO – 16
6 8DO – 17
Tab. B/7: Indirizzi degli ingressi e delle uscite riferiti all’esempio, vedi Fig. B/14

B. Configurazione con nodo bus CPX o CPX-FEC
B-22 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Dati di uscita modulo Dati d’ingresso modulo
AB Contenuto Indirizzo EB Contenuto Indirizzo
AB10 Controlbyte 1:Bit Nome0 POS11 POS22 POS33 POS44 STOP5 JOG_NEG6 JOG_POS7 RESET_FAULT
A10.0A10.1A10.2A10.3A10.4A10.5A10.6A10.7
EB10 Statusbyte 1:Bit Nome0 MC_POS11 MC_POS22 MC_POS33 MC_POS44 ACK_STOP5 READY6 FAULT7 TEACH_ACTIVE
E10.0E10.1E10.2E10.3E10.4E10.5E10.6E10.7
AB11 Controlbyte 2:Bit Nome0 RETAIN_POS31 RETAIN_POS42 START_TEACH3 BRAKE4 – (riservato)5 – (riservato)6 – (riservato)7 DISABLE_KEYS
A11.0A11.1A11.2A11.3A11.4A11.5A11.6A11.7
EB11 Statusbyte 2:Bit Nome0 –1 –2 –3 STATUS_BRAKE4 STATUS_AIR5 LOADVOLTAGE6 –7 REF_DONE
E11.0E11.1E11.2E11.3E11.4E11.5E11.6E11.7
AB12 – (riservato) A12.0...7 EB12 Numero di errore delCMPX (par. 6.2.3)
E12.0...7
AB13Indice parametroBit Nome0 Lettura parametri
1 Scritturaparametri
2 – (riservato)3 – (riservato)4....7 Indice parametro
A13.0
A13.1
A13.2A13.3A13.4...7
EB13 Segnale di conferma delparametroBit Nome0 Parametro tras-
messo/valido1 Istruzione para-
metro noneseguibile
2 – (riservato)3 – (riservato)4....7 Indice parametro
E13.0
E13.1
E13.2E13.3E13.4...7
AB14 Lowbyte parametro A14.0...7 EB14 Lowbyte dei parametritrasmessi/letti.
E14.0...7
AB15 Highbyte parametro A15.0...7 EB15 Highbyte dei parametritrasmessi/letti.
E15.0...7
Tab. B/8: Indirizzi dei controlbyte e degli statusbyte del CMPX nell’esempio Fig. B/14
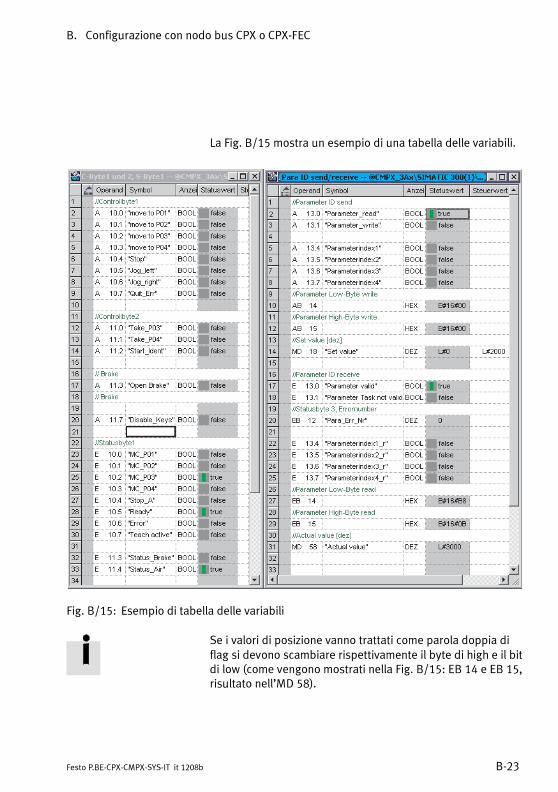
B. Configurazione con nodo bus CPX o CPX-FEC
B-23Festo P.BE-CPX-CMPX-SYS-IT it 1208b
La Fig. B/15 mostra un esempio di una tabella delle variabili.
Fig. B/15: Esempio di tabella delle variabili
Se i valori di posizione vanno trattati come parola doppia diflag si devono scambiare rispettivamente il byte di high e il bitdi low (come vengono mostrati nella Fig. B/15: EB 14 e EB 15,risultato nell’MD 58).
B. Configurazione con nodo bus CPX o CPX-FEC
B-24 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.3 CPX-FB11 (DeviceNet)
Per informazioni generali sulla configurazione consultare ladescrizione del CPX-FB11 (tipo P.BE-CPX-FB11-...).
B.3.1 Configurazione delle caratteristiche degli utenti DeviceNet (EDS)
Nel caso in cui venga messo in funzione per la prima volta unnuovo utente DeviceNet, è necessario comunicare al pro-gramma di configurazione utilizzato determinate caratteristi-che relative all’utente.
Le caratteristiche dei vari utenti vengono solitamente gestitedal programma di configurazione in una lista o libreria ad es.nella libreria EDS (EDS sta per electronic data sheets).
Se si utilizza il CMPX si possono utilizzare le seguenti moda-lità:
– Installare file EDS: EDS modulare.La parametrizzazione di moduli tecnologici come il CMPXviene supportata solo con l’EDS modulare.
– Registrare le caratteristiche degli utenti manualmente(non è possibile alcuna impostazione con parametro).
Attenersi alle informazioni contenute nella descrizione delCPX-FB11.
Fornitore di file EDS
Fornitore Le versioni aggiornate dei file EDS, dei file di immagini (icon)e delle informazioni relative ai file EDS si trovano al seguenteindirizzo Internet:
– � www.festo.com� Downloads� Immettere il terminedi ricerca: EDS
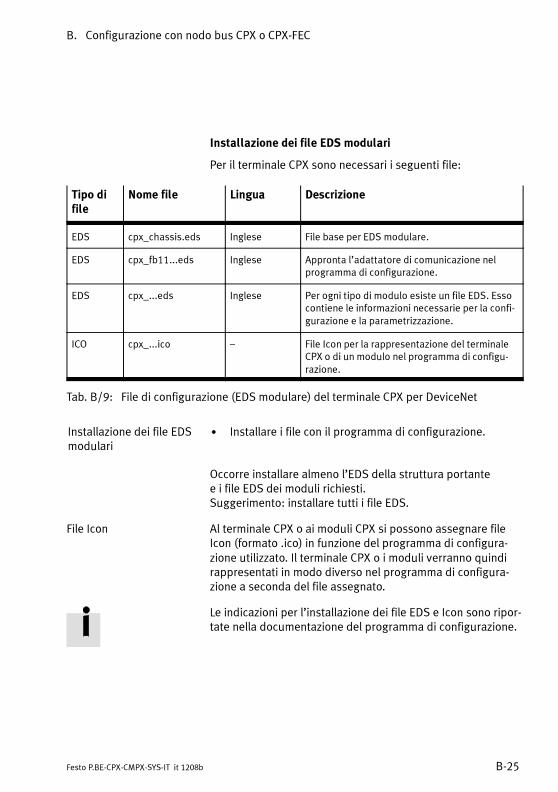
B. Configurazione con nodo bus CPX o CPX-FEC
B-25Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Installazione dei file EDS modulari
Per il terminale CPX sono necessari i seguenti file:
Tipo difile
Nome file Lingua Descrizione
EDS cpx_chassis.eds Inglese File base per EDS modulare.
EDS cpx_fb11...eds Inglese Appronta l’adattatore di comunicazione nelprogramma di configurazione.
EDS cpx_...eds Inglese Per ogni tipo di modulo esiste un file EDS. Essocontiene le informazioni necessarie per la confi-gurazione e la parametrizzazione.
ICO cpx_...ico – File Icon per la rappresentazione del terminaleCPX o di un modulo nel programma di configu-razione.
Tab. B/9: File di configurazione (EDS modulare) del terminale CPX per DeviceNet
Installazione dei file EDSmodulari
• Installare i file con il programma di configurazione.
Occorre installare almeno l’EDS della struttura portantee i file EDS dei moduli richiesti.Suggerimento: installare tutti i file EDS.
File Icon Al terminale CPX o ai moduli CPX si possono assegnare fileIcon (formato .ico) in funzione del programma di configura-zione utilizzato. Il terminale CPX o i moduli verranno quindirappresentati in modo diverso nel programma di configura-zione a seconda del file assegnato.
Le indicazioni per l’installazione dei file EDS e Icon sono ripor-tate nella documentazione del programma di configurazione.
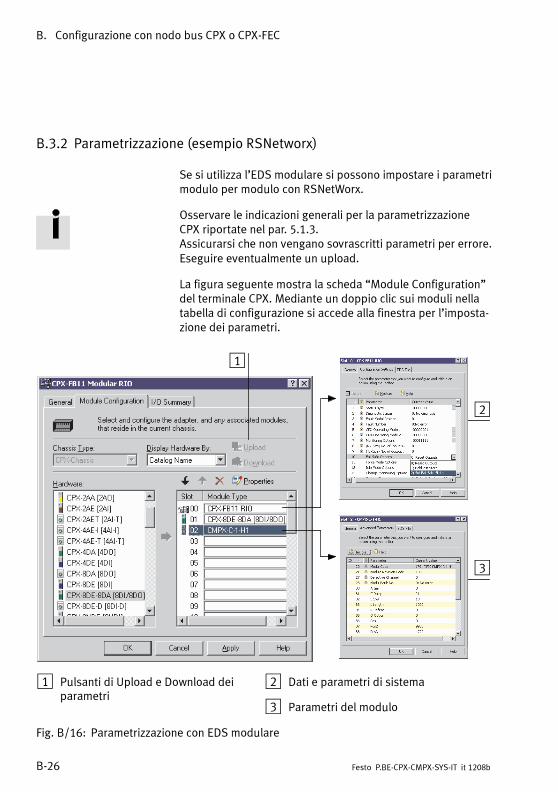
B. Configurazione con nodo bus CPX o CPX-FEC
B-26 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.3.2 Parametrizzazione (esempio RSNetworx)
Se si utilizza l’EDS modulare si possono impostare i parametrimodulo per modulo con RSNetWorx.
Osservare le indicazioni generali per la parametrizzazioneCPX riportate nel par. 5.1.3.Assicurarsi che non vengano sovrascritti parametri per errore.Eseguire eventualmente un upload.
La figura seguente mostra la scheda “Module Configuration”del terminale CPX. Mediante un doppio clic sui moduli nellatabella di configurazione si accede alla finestra per l’imposta-zione dei parametri.
1
2
3
1 Pulsanti di Upload e Download deiparametri
2 Dati e parametri di sistema
3 Parametri del modulo
Fig. B/16: Parametrizzazione con EDS modulare
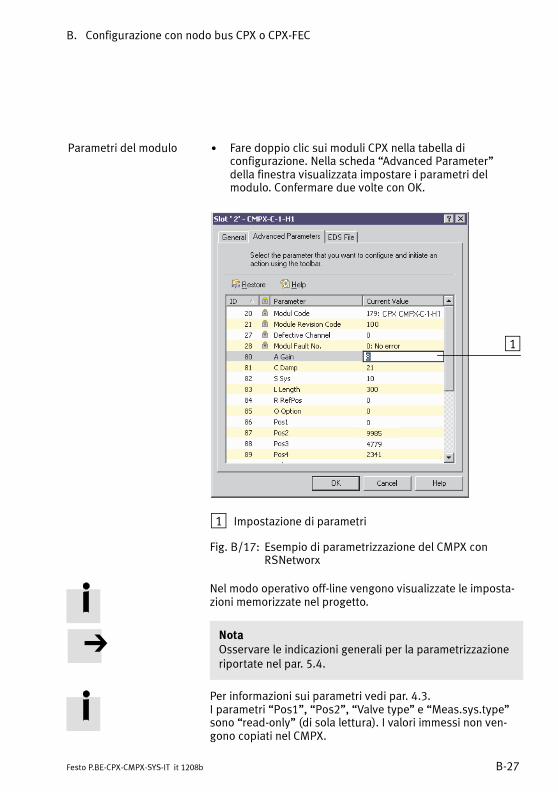
B. Configurazione con nodo bus CPX o CPX-FEC
B-27Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Parametri del modulo • Fare doppio clic sui moduli CPX nella tabella diconfigurazione. Nella scheda “Advanced Parameter”della finestra visualizzata impostare i parametri delmodulo. Confermare due volte con OK.
1
1 Impostazione di parametri
Fig. B/17: Esempio di parametrizzazione del CMPX conRSNetworx
Nel modo operativo off-line vengono visualizzate le imposta-zioni memorizzate nel progetto.
NotaOsservare le indicazioni generali per la parametrizzazioneriportate nel par. 5.4.
Per informazioni sui parametri vedi par. 4.3.I parametri “Pos1”, “Pos2”, “Valve type” e “Meas.sys.type”sono “read-only” (di sola lettura). I valori immessi non ven-gono copiati nel CMPX.
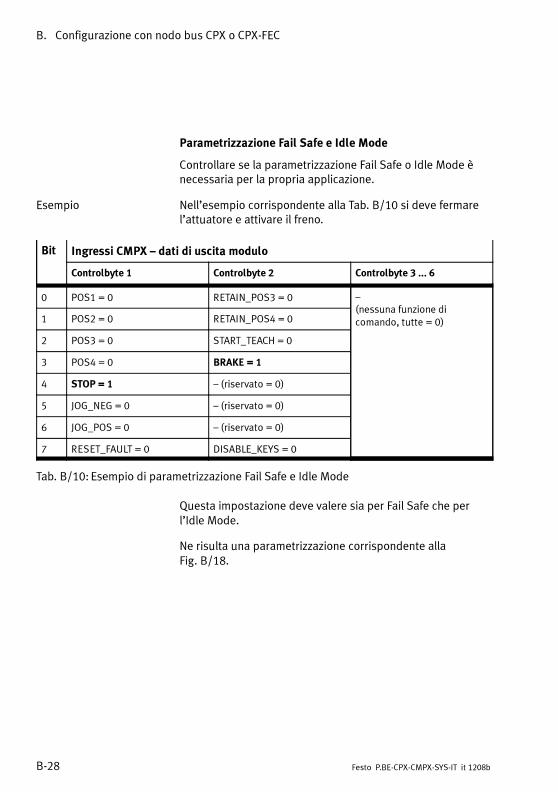
B. Configurazione con nodo bus CPX o CPX-FEC
B-28 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Parametrizzazione Fail Safe e Idle Mode
Controllare se la parametrizzazione Fail Safe o Idle Mode ènecessaria per la propria applicazione.
Esempio Nell’esempio corrispondente alla Tab. B/10 si deve fermarel’attuatore e attivare il freno.
Bit Ingressi CMPX – dati di uscita modulo
Controlbyte 1 Controlbyte 2 Controlbyte 3 ... 6
0 POS1 = 0 RETAIN_POS3 = 0 –(nessuna funzione dicomando, tutte = 0)1 POS2 = 0 RETAIN_POS4 = 0
2 POS3 = 0 START_TEACH = 0
3 POS4 = 0 BRAKE = 1
4 STOP = 1 – (riservato = 0)
5 JOG_NEG = 0 – (riservato = 0)
6 JOG_POS = 0 – (riservato = 0)
7 RESET_FAULT = 0 DISABLE_KEYS = 0
Tab. B/10: Esempio di parametrizzazione Fail Safe e Idle Mode
Questa impostazione deve valere sia per Fail Safe che perl’Idle Mode.
Ne risulta una parametrizzazione corrispondente allaFig. B/18.
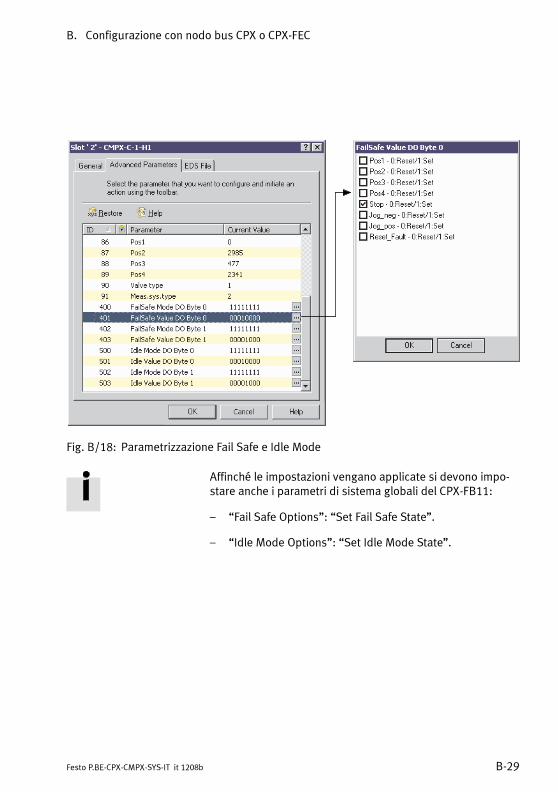
B. Configurazione con nodo bus CPX o CPX-FEC
B-29Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Fig. B/18: Parametrizzazione Fail Safe e Idle Mode
Affinché le impostazioni vengano applicate si devono impo-stare anche i parametri di sistema globali del CPX-FB11:
– “Fail Safe Options”: “Set Fail Safe State”.
– “Idle Mode Options”: “Set Idle Mode State”.
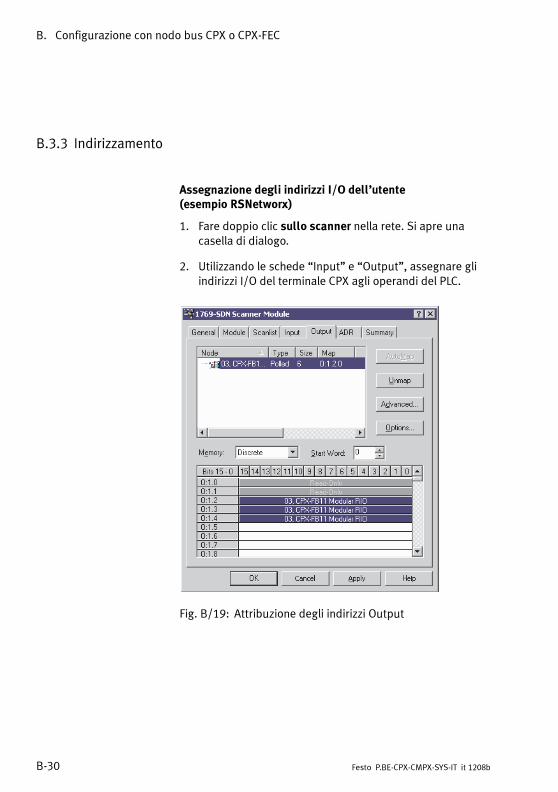
B. Configurazione con nodo bus CPX o CPX-FEC
B-30 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
B.3.3 Indirizzamento
Assegnazione degli indirizzi I/O dell’utente(esempio RSNetworx)
1. Fare doppio clic sullo scanner nella rete. Si apre unacasella di dialogo.
2. Utilizzando le schede “Input” e “Output”, assegnare gliindirizzi I/O del terminale CPX agli operandi del PLC.
Fig. B/19: Attribuzione degli indirizzi Output
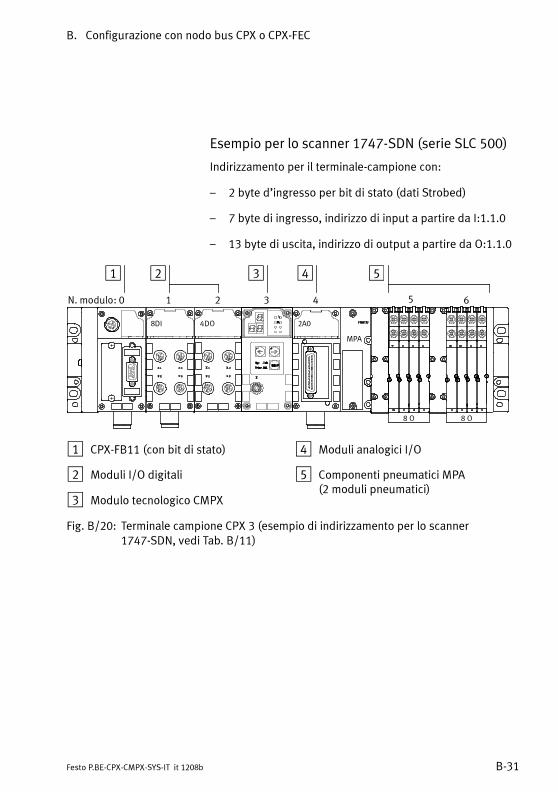
B. Configurazione con nodo bus CPX o CPX-FEC
B-31Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Esempio per lo scanner 1747-SDN (serie SLC 500)
Indirizzamento per il terminale-campione con:
– 2 byte d’ingresso per bit di stato (dati Strobed)
– 7 byte di ingresso, indirizzo di input a partire da I:1.1.0
– 13 byte di uscita, indirizzo di output a partire da O:1.1.0
8DI 2A04DO
8 O 8 O
1
MPA
2 4 53
N. modulo: 0 1 2 3 4 5 6
1 CPX-FB11 (con bit di stato)
2 Moduli I/O digitali
3 Modulo tecnologico CMPX
4 Moduli analogici I/O
5 Componenti pneumatici MPA(2 moduli pneumatici)
Fig. B/20: Terminale campione CPX 3 (esempio di indirizzamento per lo scanner1747-SDN, vedi Tab. B/11)

B. Configurazione con nodo bus CPX o CPX-FEC
B-32 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
N. modulo Modulo Indirizzamento
Indirizzo E Indirizzo A
0 Nodo fieldbusCPX-FB11
I:1.1.0 ... I:1.1.15(per bit di stato)
–
1 Modulo digitale a 8 ingressiCPX-8DE
I:1.7.0 ... I:1.7.7 –
2 Modulo digitale a 4 usciteCPX-4DA
– O:1.4.0 ... O:1.4.3
3 SoftStopCPX-CMPX-C-1-H1
I:1.4.0 ... I:1.4.15I:1.5.0 ... I:1.5.15I:1.6.0 ... I:1.6.15
O:1.1.0 ... O:1.1.15O:1.2.0 ... O:1.2.15O:1.3.0 ... O:1.3.15
4 Modulo analogico a 2 ingressiCPX-2AE
O:1.2.0 ... O:1.2.15O:1.3.0 ... O:1.3.15
–
5 Modulo pneumatico MPA1 – O:1.4.8 ... O:1.4.15
6 Modulo pneumatico MPA1 – O:1.5.0 ... O:1.5.7
Tab. B/11: Esempio di indirizzamento dello scanner 1747-SDN

B. Configurazione con nodo bus CPX o CPX-FEC
B-33Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Dati di uscita modulo Dati d’ingresso modulo
OW Contenuto Indirizzo IW Contenuto Indirizzo
OW:1.4 Controlbyte 1:Bit Nome0 POS11 POS22 POS33 POS44 STOP5 JOG_NEG6 JOG_POS7 RESET_FAULT
O:1.4.0O:1.4.1O:1.4.2O:1.4.3O:1.4.4O:1.4.5O:1.4.6O:1.4.7
IW:1.1 Statusbyte 1:Bit Nome0 MC_POS11 MC_POS22 MC_POS33 MC_POS44 ACK_STOP5 READY6 FAULT7 TEACH_ACTIVE
I:1.1.0I:1.1.1I:1.1.2I:1.1.3I:1.1.4I:1.1.5I:1.1.6I:1.1.7
Controlbyte 2:Bit Nome0 RETAIN_POS31 RETAIN_POS42 START_TEACH3 BRAKE4 – (riservato)5 – (riservato)6 – (riservato)7 DISABLE_KEYS
O:1.4.8O:1.4.9O:1.4.10O:1.4.11O:1.4.12O:1.4.13O:1.4.14O:1.4.15
Statusbyte 2:Bit Nome0 –1 –2 –3 STATUS_BRAKE4 STATUS_AIR5 LOADVOLTAGE6 –7 REF_DONE
I:1.1.8I:1.1.9I:1.1.10I:1.1.11I:1.1.12I:1.1.13I:1.1.14I:1.1.15
OW:1.5 – (riservato) O:1.5.0...7 IW:1.2 Numero di errore delCMPX (par. 6.2.3)
I:1.2.0...7
Indice parametroBit Nome0 Lettura parametri
1 Scritturaparametri
2 – (riservato)3 – (riservato)4....7 Indice parametro
O:1.5.8
O:1.5.9
O:1.5.10O:1.5.11O:1.5.12...15
Segnale di conferma delparametroBit Nome0 Parametro tras-
messo/valido1 Istruzione para-
metro noneseguibile
2 – (riservato)3 – (riservato)4....7 Indice parametro
I:1.2.8
I:1.2.9
I:1.2.10I:1.2.11I:1.2.12...15
OW:1.6 Lowbyte parametro O:1.6.0...7 IW:1.3 Lowbyte dei parametritrasmessi/letti.
I:1.3.0...7
Highbyte parametro O:1.6.8...15 Highbyte dei parametritrasmessi/letti.
I:1.3.8...15
Tab. B/12: Indirizzi dei controlbyte e degli statusbyte del CMPX nell’esempio Fig. B/20
B. Configurazione con nodo bus CPX o CPX-FEC
B-34 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indice analitico
C-1Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Appendice C
Indice analitico
C. Indice analitico
C-2 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
C. Indice analitico
C-3Festo P.BE-CPX-CMPX-SYS-IT it 1208b
A
Abbreviazioni, Specifiche del prodotto XIX. . . . . . . . . . . . . . . .
Aggiramento in tempi ottimizzati 5-31. . . . . . . . . . . . . . . . . . .
Alimentazione di tensione 3-12. . . . . . . . . . . . . . . . . . . . . . . . .
Anomalie di funzionamento 6-28. . . . . . . . . . . . . . . . . . . . . . . .
Arresto 4-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Assestamento 4-14, 4-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Assistenza XII, XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Assoluto (trasduttore di posizione) XX. . . . . . . . . . . . . . . . . .
Assorbimento di corrente 3-13. . . . . . . . . . . . . . . . . . . . . . . . .
Attivazione del modo di modifica 4-29. . . . . . . . . . . . . . . . . . .
Attuatore XIX, 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Attuatori A-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Avvertenza per la sicurezza X. . . . . . . . . . . . . . . . . . . . . . . . . . .
Avvio della corsa di riferimento 4-52. . . . . . . . . . . . . . . . . . . . .
B
Battute fisse 2-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit di stato 6-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C
Caratteristiche di inserimentoAlla conclusione della messa in funzione 4-10. . . . . . . . . . .Dopo le fasi preliminari di messa in funzione(a tavolino) 4-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Carico 2-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

C. Indice analitico
C-4 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
CMPXArea di indirizzo 5-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Compiti del CMPX 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Elementi di connessione e segnalazione 1-3. . . . . . . . . . . . .Funzionamento 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Possibilità di messa in funzione, parametrizzazionee programmazione mediante ”teach-in” 1-8. . . . . . . . . . .
Control Interface XIX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controllo dei tempi di posizionamento 4-14, 4-15. . . . . . . . . .
Corsa di riferimento dopo POWER ON 4-21, 4-52. . . . . . . . . .
CPX-MMI 6-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D
Dati diagnostici del moduloNumero del primo canale interessato da errore 6-26. . . . . .Numero di errore del modulo 6-26. . . . . . . . . . . . . . . . . . . .
Dati tecnici A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Definizione del riferimento nel corsodella procedura di teach-in 4-21. . . . . . . . . . . . . . . . . . . . . .
DiagnosiCon il configuratore hardware B-10. . . . . . . . . . . . . . . . . . . .Con l’handheld 6-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Nel programma utente B-13. . . . . . . . . . . . . . . . . . . . . . . . . .
Disinserimento della tensione di carico 3-18. . . . . . . . . . . . . .
E
ErroriNumeri di errore 6-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Panoramica 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Reazione 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Reset 6-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Esecuzione di una nuova procedura di teach-in 4-33. . . . . . . .
C. Indice analitico
C-5Festo P.BE-CPX-CMPX-SYS-IT it 1208b
F
Fail Safe 5-6, B-19, B-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
File EDS modulari B-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
File GSD B-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Filtro-riduttore 2-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
G
Gioco del giunto 2-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Gruppo di destinazione XII. . . . . . . . . . . . . . . . . . . . . . . . . . . .
H
HandheldFunzioni diagnostiche 6-20. . . . . . . . . . . . . . . . . . . . . . . . . .Memoria di diagnosi 6-24, 6-26. . . . . . . . . . . . . . . . . . . . . . .
I
Identificazione 4-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Identificazione dinamica 4-18. . . . . . . . . . . . . . . . . . . . . . . . . .
Identificazione statica 4-18. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Idle mode 5-6, B-6, B-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Impiego conforme all’utilizzo previsto IX. . . . . . . . . . . . . . . . .
Incrementale (trasduttore di posizione) XX. . . . . . . . . . . . . . .
Indicazioni nel testo XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice analitico
C-6 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
Indicazioni per l’installazioneAlimentazione dell’aria compressa 2-22. . . . . . . . . . . . . . . .Attuatore con alimentazione pneumaticaunilaterale 2-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Carico 2-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Filtro-riduttore 2-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Riallestimento di impianti 2-27. . . . . . . . . . . . . . . . . . . . . . .Rubi pneumatici e raccordi filettati 2-28. . . . . . . . . . . . . . . .Serbatoio per aria compressa 2-24. . . . . . . . . . . . . . . . . . . .Sistema di misura esterno: tipo MLO-POT-... 2-15. . . . . . . .Valvola proporzionale di controllo portata 2-24. . . . . . . . . .
Indicazioni per l’utilizzatore XIV. . . . . . . . . . . . . . . . . . . . . . . .
Indicazioni relative alla descrizione XVI. . . . . . . . . . . . . . . . . .
Informazioni di stato 6-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interfaccia diagnostica I/O, Memoria di diagnosi 6-24, 6-26.
Inversione 5-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
L
LED 6-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Linea assi XIX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
M
Memoria di diagnosi 6-24, 6-26. . . . . . . . . . . . . . . . . . . . . . . .
Memoria diagnostica B-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Messa in funzioneOperazioni preliminari per la messa in funzione 4-32. . . . .Preliminari alla procedura di teach-in 4-19. . . . . . . . . . . . . .
MMI 6-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modifica dei parametri 4-29. . . . . . . . . . . . . . . . . . . . . . . . . . . .
MontaggioAttuatore 2-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Battute fisse 2-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice analitico
C-7Festo P.BE-CPX-CMPX-SYS-IT it 1208b
N
Nodo bus CPX / CPX-FEC XIII. . . . . . . . . . . . . . . . . . . . . . . . . . .
O
Opzioni 4-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OttimizzazioneIntervento sui tempi di traslazione 6-34. . . . . . . . . . . . . . . .Procedura di ottimizzazione 6-31. . . . . . . . . . . . . . . . . . . . .
Ottimizzazione del comportamento dell’attuatore 6-29. . . . .
P
Parametri 4-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Coerenza 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parametro di sistema XIX, 4-12. . . . . . . . . . . . . . . . . . . . . . . . .
Pittogrammi XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Possibilità diagnostiche, panoramica 6-3. . . . . . . . . . . . . . . . .
Precisione di ripetibilità 4-36. . . . . . . . . . . . . . . . . . . . . . . . . . .
Principio di alimentazione elettricaDisinserimento della tensione di carico 3-18. . . . . . . . . . . .Formazione di zone di tensione 3-14. . . . . . . . . . . . . . . . . . .
Procedura di teach-in XX, 4-18. . . . . . . . . . . . . . . . . . . . . . . . . .
Punti di riferimento 4-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
R
Reset di errori 6-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ripristino dello stato di fornitura 4-30. . . . . . . . . . . . . . . . . . .
C. Indice analitico
C-8 Festo P.BE-CPX-CMPX-SYS-IT it 1208b
S
Segnale logico 0 XX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Segnale logico 1 XX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Serbatoio per aria compressa 2-24. . . . . . . . . . . . . . . . . . . . . .
Sistema di misura 2-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema Soft StopAttuatori supportati A-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . .Componenti A-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Possibilità di messa in funzione, parametrizzazionee programmazione mediante “teach-in” 1-8. . . . . . . . . . .
Struttura 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Stadio di accelerazione XX, 4-12, 6-30. . . . . . . . . . . . . . . . . . .
Stadio di decelerazione XX, 4-12, 6-30. . . . . . . . . . . . . . . . . . .
Stop, Comportamento in caso di arresto 4-16. . . . . . . . . . . . .
T
Teach-in delle posizione intermedie 4-39. . . . . . . . . . . . . . . . .
Tempi di risposta all’istruzione di traslazione 5-27. . . . . . . . .
Trasduttore di posizione 2-14. . . . . . . . . . . . . . . . . . . . . . . . . .Assoluto XX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Incrementale XX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tubi pneumatici 2-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Z
Zone di tensione 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .









![Festo A5 1spaltig · 8022610 CPX-FVDA-P2. Modulo di uscita. 8022610. 2018-10b [8093498] Descrizione](https://static.fdocumenti.com/doc/165x107/6028e4d337a961764d06ddbb/festo-a5-1spaltig-8022610-cpx-fvda-p2-modulo-di-uscita-8022610-2018-10b-8093498.jpg)

![Terminale CPX Connessione elettrica CPX-CTEL-2-M12-5POL-LK€¦ · Connessione elettrica CPX-CTEL-2-M12-5POL-LK Descrizione della parte elettronica 8034119 1405NH [8034127] Terminale](https://static.fdocumenti.com/doc/165x107/5ffd6c028f2c9703ff27d87b/terminale-cpx-connessione-elettrica-cpx-ctel-2-m12-5pol-lk-connessione-elettrica.jpg)




