Superfici
10
Coni, cilindri, super fi ci di rotazione e quadriche Sottintenderemo come al solito che nello spazio si è fissato un riferimento ortonormale R (O; i, j, k), rispetto a cui le coordinate si chiameranno (x, y, z) e tramite il quale identificheremo ogni vettore u con la terna delle sue componenti. 1. Coni Si chiama cono il luogo delle rette (generatrici) passanti per un punto V (vertice) e incidenti una linea Γ (direttrice) 1 . Il cono di vertice V e direttrice Γ è anche detto cono proiettante Γ da V . Il cono proiettante Γ da V è dunque il luogo dei punti P tali che −→ VP = s −→ VG con G ∈ Γ e s ∈ R (equazione vettoriale del cono). Cono C di vertice V (x V ,y V ,z V ) e direttrice Γ : x = x (t) y = y (t) z = z (t) , cioè Γ : G = G (t) L’equazione vettoriale −→ VP = s −→ VG con G = G (t) equivale alle equazioni parametriche scalari C : x = x V + s (x (t) − x V ) y = y V + s (y (t) − y V ) z = z V + s (z (t) − z V ) (s, t parametri), da cui si ottiene anche l’equazione cartesiana di C eliminando i parametri s, t. 1 eventualmente formata da più rami o ridotta ad un solo punto
-
Upload
andreamercuri -
Category
Documents
-
view
213 -
download
0
description
geometria
Transcript of Superfici

Coni, cilindri, superfici di rotazione e quadriche
Sottintenderemo come al solito che nello spazio si è fissato un riferimento ortonormaleR (O; i, j,k), rispetto a cui le coordinate si chiameranno (x, y, z) e tramite il qualeidentificheremo ogni vettore u con la terna delle sue componenti.
1. Coni
Si chiama cono il luogo delle rette (generatrici) passanti per un punto V (vertice)e incidenti una linea Γ (direttrice)1 .Il cono di vertice V e direttrice Γ è anche detto cono proiettante Γ da V .
Il cono proiettante Γ da V è dunqueil luogo dei punti P tali che
−→V P = s
−→V G con G ∈ Γ e s ∈ R
(equazione vettoriale del cono).
Cono C di vertice V (xV , yV , zV ) e direttrice Γ :
x = x (t)y = y (t)z = z (t)
, cioè Γ : G = G (t)
L’equazione vettoriale−→V P = s
−→V G con G = G (t) equivale alle equazioni parametriche
scalari
C :
x = xV + s (x (t)− xV )y = yV + s (y (t)− yV )z = zV + s (z (t)− zV )
(s, t parametri),
da cui si ottiene anche l’equazione cartesiana di C eliminando i parametri s, t.
1 eventualmente formata da più rami o ridotta ad un solo punto

Cono C di vertice V (xV , yV , zV ) e direttrice Γ :f (x, y, z) = 0g (x, y, z) = 0
L’equazione vettoriale−→V P = s
−→V G con G (x0, y0, z0) ∈ Γ equivale a x = xV + s (x0 − xV )
y = yV + s (y0 − yV )z = zV + s (z0 − zV )
conf (x0, y0, z0) = 0g (x0, y0, z0) = 0
e quindi l’equazione cartesiana di C si ottiene eliminando s, x0, y0, z0 dal sistemax = xV + s (x0 − xV )y = yV + s (y0 − yV )z = zV + s (z0 − zV )f (x0, y0, z0) = 0g (x0, y0, z0) = 0.
Altri richiami
• Un cono C è detto rotondo se e solo se esiste una retta a (asse del cono) taleche C è dato dalla rotazione di una sua generatrice (qualsiasi) intorno ad a.
• Se f : R3 → R è una funzione omogenea, allora la superficie di equazionecartesiana f (x, y, z) = 0 è un cono con vertice nell’origine2 (più in generale, lasuperficie f (x− x0, y − y0, z − z0) = 0 è un cono con vertice in V (x0, y0, z0)).
2. Cilindri
Si chiama cilindro il luogo delle rette (generatrici) parallele ad un vettore u eincidenti una linea Γ (direttrice)3 .Il cilindro con generatrici parallele ad u e di direttrice Γ è anche detto cilindroproiettante Γ secondo (la direzione di) u.
Il cilindro proiettante Γ secondo u è quindiil luogo dei punti P tali che
−→GP = su con G ∈ Γ e s ∈ R
(equazione vettoriale del cilindro).
2 tolto il caso in cui f (x, y, z) = 0 implichi x = y = z = 0 (ad esempio se f (x, y, z) = x2+y2+z2)3 eventualmente formata da più rami o ridotta ad un solo punto
2

Cilindro C parallelo a u = (l,m, n) di direttrice Γ :
x = x (t)y = y (t)z = z (t)
, cioè Γ : G = G (t)
L’equazione vettoriale−→GP = su con G = G (t) equivale alle equazioni parametriche
scalari
C :
x = x (t) + sly = y (t) + smz = z (t) + sn
(s, t parametri),
da cui si ottiene anche l’equazione cartesiana di C eliminando i parametri s, t.
Cilindro C parallelo a u = (l,m, n) di direttrice Γ : f (x, y, z) = 0g (x, y, z) = 0
L’equazione vettoriale−→GP = su con G (x0, y0, z0) ∈ Γ equivale a x = x0 + sly = y0 + smz = z0 + sn
conf (x0, y0, z0) = 0g (x0, y0, z0) = 0
e quindi l’equazione cartesiana di C si ottiene eliminando s, x0, y0, z0 dal sistemax = x0 + sly = y0 + smz = z0 + smf (x0, y0, z0) = 0g (x0, y0, z0) = 0.
Altri richiami
• Un cilindro C è detto rotondo se e solo se esiste una retta a (asse del cilindro)tale che C è dato dalla rotazione di una sua generatrice (qualsiasi) intorno ada.
• Se un’equazione in due tra le incognite x, y, z rappresenta una curva nel relativopiano coordinato, nello spazio essa rappresenta il cilindro proiettante tale curvasecondo la direzione normale a quel piano coordinato.
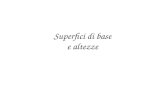
Ad esempio, l’equazione
3x2 − 2z2 = 2rappresenta il cilindro parallelo all’asse yche interseca il piano xz secondo l’iperbole
3x2 − 2z2 = 2y = 0
(direttrice del cilindro).
x4 2 0 -2 -4y 420-2-4
6
4
2
0
-2
-4
-6
3

• Eliminando il parametro da una terna di equazioni parametriche di una lineaΓ, si ottiene una rappresentazione cartesiana di Γ come intersezione di cilindriproiettanti Γ secondo due direzioni coordinate.
Ad esempio, la linea
Γ :
x = ty = t2
z = t2 − tè la parabola data dall’intersezione
Γ :y = x2
z = x2 − xdi due cilindri (quadrici parabolici).
• Eliminando un’incognita da una rappresentazione cartesiana (intersezione didue superfici) di una linea Γ, si ottiene un’altra rappresentazione cartesiana diΓ come intersezione di una delle superfici di partenza con il cilindro proiettanteΓ secondo una direzione coordinata.
Ad esempio, la circonferenza
Γ :x+ y + z = 3x2 + y2 + z2 − 2x− 2y + 1 = 0
è anche individuata da
Γ :z = 3− x− yx2 + y2 − 4x− 4y + xy + 5 = 0
(intersezione piano-cilindro).
3. Proiezioni
i) Dati un punto V ed un piano α, la proiezione da V su α di un punto P = V èl’unico punto Pα ∈ α in cui la retta V P interseca α.
ii) Dati un vettore u ed un piano α, la proiezione secondo u su α di un punto P èl’unico punto Pα ∈ α in cui la retta per P parallela ad u interseca α(se u ⊥ α, si ritrova la proiezione ortogonale di P su α).
iii) La proiezione di una figura F su un piano α è il luogo delle proiezioni dei puntidi F su α.
4

In particolare, dati un piano α ed una linea Γ, la proiezione di Γ da un puntoV su α risulta data dall’intersezione di α con il cono di vertice V e direttrice Γ,mentre la proiezione di Γ secondo un vettore u su α risulta essere l’intersezionedi α con il cilindro parallelo ad u di direttrice Γ.
4. Superfici di rotazione
Si chiama superficie di rotazione il luogo delle circonferenze (paralleli) ortogonaliad una retta a (asse), con centro su a e incidenti una linea Γ (generatrice).
Fissiamo un qualunque punto A ∈ a ed un qualunque vettore u parallelo ad a. Lasuperficie di rotazione di asse a e generatrice Γ è il luogo dei punti P tali che
−→GP · u = 0 (piano ⊥ a e passante per G)d (P,A) = d (G,A) (sfera di centro A e passante per G)
(4.1)
dove G è il generico punto di Γ (infatti, per G ∈ Γ fissato, tali equazioni fornisconola circonferenza ortogonale ad a, con centro su a e passante per G).
Casi particolari
• Curva parametrica ruotata intorno ad un asse coordinato: una rappre-sentazione parametrica della superficie ottenuta ruotando una curva parametricaΓ : G = G (t) intorno ad un asse coordinato a si ottiene dalla rappresentazioneparametrica di Γ sostituendo le due equazioni relative alle variabili del piano co-ordinato perpendicolare ad a con le equazioni parametriche della circonferenzadi quel piano con centro nell’origine e raggio d (G (t) , a) 4 .
4Ricordiamo che se G = G (x (t) , y (t) , z (t)) allora
d (G, assex) = y (t)2 + z (t)2, d (G, asse y) = x (t)2 + z (t)2, d (G, asse z) = x (t)2 + y (t)2.
5
Compaq_Proprietario

Ad esempio, la superficie di rotazione Σ di asse a : y = z = 0 (asse x) egeneratrice
Γ :
x = x (t) = t
y = y (t) = t cos t
z = z (t) = t sin t
, t ∈ [0, 10]
(si noti che Γ non è piana, ad esempio perché i 4 punti di Γ corrispondenti aivalori t = 0, π2 ,π,
3π2 del parametro non stanno sullo stesso piano) ha equazioni
parametriche
Σ :
x = x (t)
y = y (t)2 + z (t)2 cos θ
z = y (t)2+ z (t)
2sin θ
, t ∈ [0, 10] , θ ∈ [0, 2π] ,
ossia
Σ :
x = t
y = t cos θ
z = t sin θ
con t ∈ [0, 10] e θ ∈ [0, 2π] .
Volendo, possiamo ricavare una rappresentazione cartesiana di Σ eliminando iparametri t, θ. Dalle ultime due equazioni si ricava y2+z2 = t2 e quindi, usandola prima ed osservando che t ∈ [0, 10] equivale a x ∈ [0, 10], si ottiene
Σ : x2 − y2 − z2 = 0 con 0 ≤ x ≤ 10(tronco del cono x2 − y2 − z2 = 0 compreso tra i piani x = 0 e x = 10).
• Curva di un piano coordinato ruotata intorno ad un asse coordinatodi quel piano: l’equazione cartesiana della superficie ottenuta ruotando unalinea Γ che giace su piano coordinato π intorno ad un asse coordinato a che stiain quel piano si ottiene dall’equazione cartesiana che rappresenta Γ nel piano πlasciando ferma la variabile relativa all’asse coordinato di rotazione e sostituendol’altra con ±d (P, a), dove P (x, y, z) è il generico punto dello spazio 5.Ad esempio, la superficie di rotazione Σ di asse a : x = z = 0 (asse y) egeneratrice
Γ :y2 + 2 (z − 2)2 = 1x = 0
(ellisse nel piano yz, il quale contiene l’asse y)
5Si ricordi che d (P, assex) = y2 + z2, d (P, asse y) =√x2 + z2, d (P, asse z) = x2 + y2.
6

ha equazione cartesiana ottenuta da y2 +2 (z − 1)2 = 1 sostituendo la variabilez con ±√x2 + z2, ossia
y2 + 2 ± x2 + z2 − 22
= 1
y2 + 2x2 + 2z2 + 7 = ±8 x2 + z2
e quindi (elevando al quadrato per eliminare la radice)
Σ : y2 + 2x2 + 2z2 + 72 − 64 x2 + z2 = 0.
NOTABENE! Vale anche il viceversa: una superficie di equazione f (x, y, z) =0 con f che dipenda da due delle sue variabili solo attraverso la somma dei loroquadrati è una superficie di rotazione, il cui asse di rotazione è l’asse coordinatocorrispondente alla terza variabile (e quindi una generatrice si ottiene interse-cando la superficie con un qualsiasi semipiano contenente tale asse).
Ad esempio, la superficie Σ : e−x2−y2 − z = 0 è la rotazione attorno all’asse z
della curva
Γ :z = e−(x
2+y2)
x = 0
ossia
Γ :z = e−y
2
x = 0.
Esempio generale 1Determiniamo la superficie di rotazione Σ di asse a : x = y + 1, z = −1 e generatricer : x = 2t, y = t, z = −3t (retta, sghemba con a).Poiché a è parallela ad u = (1, 1, 0) e passa ad esempio per A (0,−1,−1), la
circonferenza ortogonale ad a, con centro su a e passante per il genericoG (2t, t,−3t) ∈r ha equazioni
x+ y − 3t = 0 (piano ⊥ a e passante per G)x2 + (y + 1)2 + (z + 1)2 = 14t2 − 4t+ 2 (sfera di centro A e passante per G)
7

(che sono le equazioni (4.1), di cui la seconda elevata al quadrato per comodità), lequali, al variare di t, danno la totalità dei paralleli di Σ.
Eliminando il parametro t = x+y3 si ottiene
x2 + (y + 1)2+ (z + 1)
2= 14 x+y
3
2 − 4x+y3 + 2
ossia, a conti fatti,
Σ : 5x2 + 5y2 − 9z2 + 28xy − 12x− 30y − 18z = 0
(quadrica passante per l’origine, che si può verificare essere un iperboloide ad unafalda).
Esempio generale 2Determiniamo la superficie di rotazione Σ di asse a : x−1 = z = 0 (retta per A (1, 0, 0)e parallela all’asse y) e generatrice Γ : y = x2, z = x2 − x (parabola, già presentatanell’esempio di pag.4).Vista la semplicità delle equazioni di Γ, potremmo ricavare facilmente una rapp-
resentazione parametrica di Γ (ad esempio assumendo x = t come parametro) e pro-cedere quindi come nell’esempio precedente, ossia scrivendo la totalità dei paralleli diΣ in dipendenza del parametro t e poi eliminandolo. Per illustrare il procedimentoda seguire quando non si disponesse di equazioni parametriche della generatrice, pro-cediamo comunque tramite le equazioni cartesiane di Γ.Poiché a è parallela all’asse y e passa ad esempio per A (1, 0, 0), la circonferenza
ortogonale ad a, con centro su a e passante per il generico G (x0, y0, z0) ∈ Γ haequazioni
y − y0 = 0(x− 1)2 + y2 + z2 = (x0 − 1)2 + y20 + z20
cony0 = x
20
z0 = x20 − x0
(dove il primo sistema è dato dalle equazioni (4.1), mentre il secondo esprime l’ap-partenenza di G (x0, y0, z0) a Γ tramite le equazioni di Γ), le quali, al variare dix0, y0, z0, danno la totalità dei paralleli di Σ. L’equazione di Σ si ottiene allora elim-inando x0, y0, z0 dal sistema
y − y0 = 0(x− 1)2 + y2 + z2 = (x0 − 1)2 + y20 + z20y0 = x
20
z0 = x20 − x0 .
Dalle equazioni 1, 3 e 4 si ricava y0 = y, x0 = ±√y0 = ±√y, z0 = y0 − x0 = y ∓√ye quindi, sostituendo nella seconda (ed elevando al quadrato alla fine), si ha
(x− 1)2 + y2 + z2 = (±√y − 1)2 + y2 + (y ∓√y)2
8

(x− 1)2 + y2 + z2 = y ∓ 2√y + 1 + y2 + y2 ∓ 2y√y + y(x− 1)2 + z2 = y2 + 2y + 1∓ 2√y (y + 1)(x− 1)2 + z2 = (y + 1)
2 ∓ 2√y (1 + y)(x− 1)2 + z2 − (y + 1)2 = ∓2√y (1 + y)
(x− 1)2 + z2 − (y + 1)22
= 4y (1 + y)2.
A conti fatti risulta allora
Σ : x4 + y4 + z4+
−2 x2y2 − x2z2 + y2z2 +−4 x3 + x2y + xz2 − xy2 + yz2 +−4 x2 − y2 + 2xy − 4y = 0 .
5. Quadriche
Si chiamano quadriche le superfici algebriche del 2◦ ordine, cioè le superfici che (inun riferimento ortonormaleR (O;x, y, z)) sono rappresentate da un’equazione del tipo
a11x2+ a22y
2+ a33z2+2a12xy+2a13xz+2a23yz+2a14x+2a24y+2a34z+ a44 = 0.
Ogni quadrica ammette un riferimento ortonormale R = R (O ;X,Y,Z) in cui as-sume una delle forme canoniche
αX2 + βY 2 + γZ2 + δ = 0 (simmetrica rispetto ai piani coordinati di R )αX2 + βY 2 + 2δZ = 0 (simmetrica rispetto a 2 piani coordinati di R ).
Una quadrica è non degenere (o propria) se e solo se ammette forma canonica concoefficienti tutti non nulli 6 .
6Altra condizione necessaria e sufficiente affinché una quadrica sia non degenere è che il determi-nante simmetrico associato sia non nullo, cioè
∆ =
a11 a12 a13 a14... a22 a23 a24... ... a33 a34... ... ... a44
= 0.
9

Le quadriche non degeneri in forma canonica si classificano quindi (a meno discambi di assi e/o orientamento degli stessi) in
• ellissoide immaginario:X2
a2+Y 2
b2+Z2
c2= −1
• ellissoide (di rotazione se e solo se due coefficienti sono uguali):X2
a2+Y 2
b2+Z2
c2= 1
• iperboloide a una falda (di rotazione se e solo se a = b):X2
a2+Y 2
b2− Z
2
c2= 1
• iperboloide a due falde (di rotazione se e solo se a = b):
−X2
a2− Y
2
b2+Z2
c2= 1
• paraboloide ellittico (di rotazione se e solo se a = b):X2
a2+Y 2
b2= 2Z
• paraboloide iperbolico:X2
a2− Y
2
b2= 2Z .
Iperboloide a una falda e paraboloide iperbolico sono superfici rigate.
Tra le quadriche degeneri in forma canonica, evidenziamo i seguenti casi.
• Coni quadrici: se non si riducono ad una coppia di piani o ad una retta, hannoforma canonica αX2 + βY 2 + γZ2 = 0 con α,β, γ non nulli e non concordi.Hanno vertice nell’origine O e sono simmetrici rispetto ai piani coordinati diR (e quindi anche rispetto agli assi di R ed all’orgine O ).Intersecano i piani coordinati di R in ellissi ed iperboli degeneri.
• Cilindri quadrici: se non si riducono a una coppia di piani o a una retta, hannoforma canonica con coefficienti tutti non nulli, tranne uno ed uno solo tra quellidei termini di 2◦ grado.Hanno generatrici parallele ad un asse coordinato di R e si distinguono inellittici, iperbolici e parabolici a seconda del tipo di curva in cui intersecano unqualunque piano non parallelo a tale asse.
Osserviamo infine esplicitamente che una quadrica degenere può non avere punti reali,o degenerare in un solo punto, o in una sola retta, o in una coppia di piani (incidentio paralleli, eventualmente coincidenti).
10