
Geometria analitica: curve e superficicorsiadistanza.polito.it/on-line/Geometria/pdf/U5_L3.pdf ·...
29
Geometria analitica: curve e superfici Sfere e circonferenze ©2006 Politecnico di Torino 1 Geometria analitica: curve e superfici 2 Sfere e circonferenze Sfere Coordinate sferiche e sfere in forma parametrica Sfere, rette e piani Circonferenze nello spazio Circonferenze in forma parametrica
Transcript of Geometria analitica: curve e superficicorsiadistanza.polito.it/on-line/Geometria/pdf/U5_L3.pdf ·...
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 1
Geometria analitica: curve e superfici
2
Sfere e circonferenze
Sfere Coordinate sferiche e sfere in forma parametricaSfere, rette e pianiCirconferenze nello spazioCirconferenze in forma parametrica

Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 2
Sfere e circonferenze
4
Sfere come luoghi geometrici
Ricordiamo che, dati un punto P0 nello spazio e un numero reale R > 0, la sfera S (P0, R ) di centro P0 e raggio R è il luogo dei punti la cui distanza da P0 è R.

Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 3
5
Equazione della sfera (1/3)
Fissato un sistema di riferimento, se P0 = (x0, y0, z0) ∈ e R > 0, abbiamo l’equazione di S (P0, R ) riferita a centro e raggio:
3
( ) ( ) ( ) ( )2 2 2 20 0 0 0, : − + − + − =S P R x x y y z z R
6
Equazione della sfera (2/3)
La sfera di centro O = (0, 0, 0) e raggio 1 ha equazione x 2 + y 2 + z 2 = 1 (sfera unitaria).
La sfera di centro (-1, 2, 3) e raggio 3 ha equazione (x + 1)2 + (y – 2)2 + (z – 3)2 = 9.

Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 4
7
Equazione della sfera (3/3)
Sviluppando i quadrati nell’equazione della sfera e ponendo a = -2x0, b = -2y0, c = -2z0, d = otteniamo
Nell’esempio precedente abbiamo
2 2 2 20 0 0+ + −x y z R
( ) 2 2 20 , : 0.+ + + + + + =S P R x y z ax by cz d
( )( ) 2 2 21,2,3 ,3 : 2 4 6 5 0.− + + + − − + =S x y z x y z
8
Sfere come luoghi di zeri (1/4)
Viceversa consideriamo l’insiemedefinito da un’equazione del tipo
con . A meno di dividere per λ possiamo assumere che
( ) 3= ⊂E Z f
( ) 2 2 2, 0.= + + + + + + =f x y x y z ax by cz dλ λ λ
0≠λ1.=λ
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 5
9
Sfere come luoghi di zeri (2/4)
Per completamento dei quadrati abbiamo
2 22
2 4⎛ ⎞⎟⎜+ = + −⎟⎜ ⎟⎜⎝ ⎠
a ax ax x
2 22
2 4⎛ ⎞⎟⎜+ = + −⎟⎜ ⎟⎜⎝ ⎠
b by by y
2 22 .
2 4⎛ ⎞⎟⎜+ = + −⎟⎜ ⎟⎜⎝ ⎠
c cz cz z
10
Sfere come luoghi di zeri (3/4)
Posto e0 0 0, , 2 2 2
=− =− =−a b cx y z
2 2 2
4+ +
= −a b ch d
( ) ( ) ( )2 2 20 0 0: 0.− + − + − − =E x x y y z z h

Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 6
11
Sfere come luoghi di zeri (4/4)
Abbiamo tre casi:
Se a 2 + b 2 + c 2 > 4d, allora h > 0 e, posto E è la sfera di centro P0 = (x0, y0, z0) e
raggio R ;
Se a 2 + b 2 + c 2 = 4d, allora h = 0 e E è il punto P0 = (x0, y0, z0);
Se a 2 + b 2 + c 2 < 4d, allora h < 0 e E = ∅.
,=R h
12
Esempio
Consideriamo la famiglia di insiemi Ek definita da
Poiché
Ek è una sfera di centro (-1, 2, 3) e raggio se k < 14, coincide col punto (-1, 2, 3) se k = 14 ed è vuoto se k > 14.
2 2 2: 2 4 6 0.+ + + − − + =kE x y z x y z k
14 − k
( ) ( ) ( )2 2 2: 1 2 3 14 0.+ + − + − + − =kE x y z k
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 7
Sfere e circonferenze
14
Coordinate sferiche
In consideriamo il seguente cambiamento di coordinate
con
La sfera S (O, R ) : x 2 + y 2 + z 2 = R 2 in coordinate sferiche ha equazione ρ = R.
3
sen cossen sencos
⎧ =⎪⎪⎪⎪ =⎨⎪⎪ =⎪⎪⎩
xyz
ρ ϕ θρ ϕ θρ ϕ
0, 0 e 0 2 .> ≤ ≤ ≤ ≤ρ ϕ π θ π
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 8
15
Parametrizzazione della sfera (1/3)
La sfera
S (P0, R ) : (x - x0)2 + (y - y0)2 + (z - z0)2 = R 2
di centro P0 = (x0, y0, z0) è l’immagine di S (O, R ) tramite la traslazione
( )0 0.= +Pt X X P
16
Parametrizzazione della sfera (2/3)
Abbiamo la parametrizzazione di S (P0, R)
Le coordinate ϕ e θ si dicono rispettivamente latitudine e longitudine.
( )0
0
0
sen cos, sen sen ,
cos
⎧ = +⎪⎪⎪⎪= = +⎨⎪⎪ = +⎪⎪⎩
x R xP y R y
z R z
ϕ θϕ θ ϕ θ
ϕ0 , 0 2 .≤ ≤ ≤ ≤ϕ π θ π
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 9
17
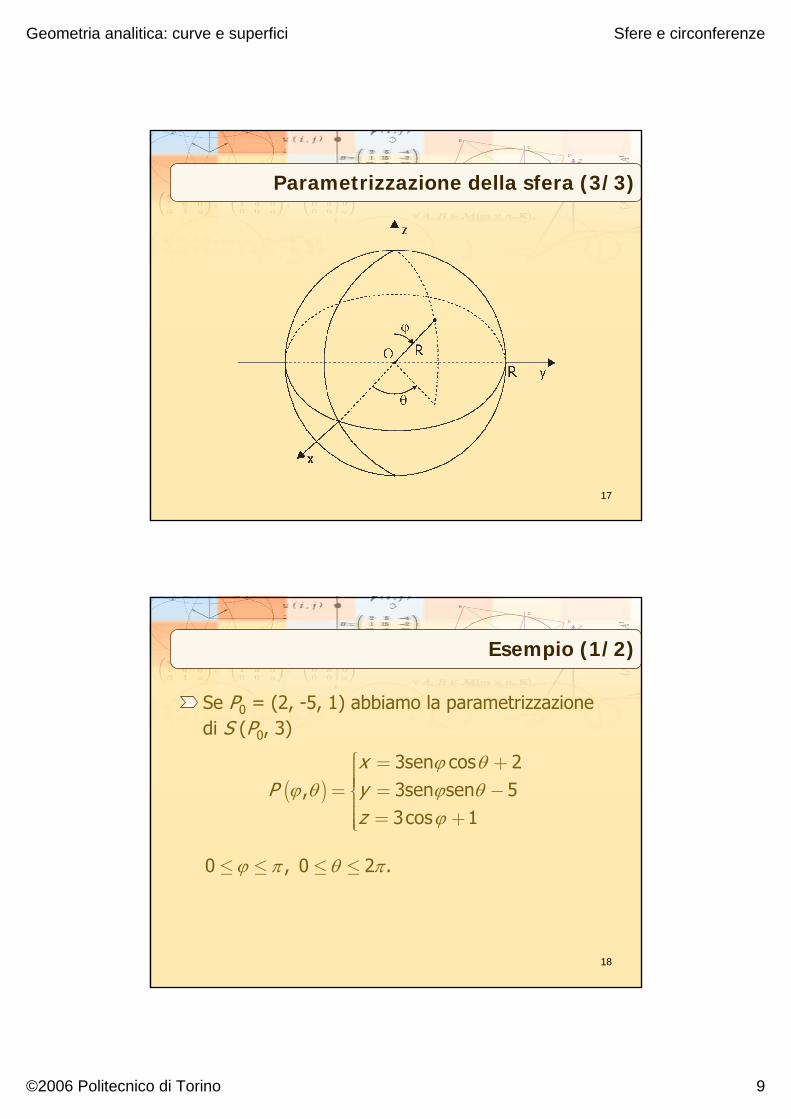
Parametrizzazione della sfera (3/3)
18
Esempio (1/2)
Se P0 = (2, -5, 1) abbiamo la parametrizzazionedi S (P0, 3)
( )3sen cos 2
, 3sen sen 53cos 1
xP y
z
ϕ θϕ θ ϕ θ
ϕ
⎧ = +⎪⎪⎪⎪= = −⎨⎪⎪ = +⎪⎪⎩
0 , 0 2 .≤ ≤ ≤ ≤ϕ π θ π
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 10
19
Esempio (2/2)
Se S : x 2 + y 2 + z 2 = 1, le seguenti sono parametrizzazioni della semisfera S + = S ∩ {z ≥ 0}:
( )1
sen cos, sen sen , 0 , 0 2 ,
2cos
⎧ =⎪⎪⎪⎪= = ≤ ≤ ≤ ≤⎨⎪⎪ =⎪⎪⎩
xP y
z
ϕ θπϕ θ ϕ θ ϕ θ π
ϕ
( ) 2 22
2 2
, , 1.
1
⎧⎪ =⎪⎪⎪= = + ≤⎨⎪⎪⎪ = − −⎪⎩
x tP t u y u t u
z t u
Sfere e circonferenze
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 11
21
Intersezione tra sfere e piani (1/4)
Se S è la sfera di centro P0 e raggio R e Πè un piano, esiste un sistema di riferimento Oxyztale che Π : z = 0 e P0 = (0, 0, z0) con z0 ≥ 0.
Poiché i cambiamenti di riferimento sono isometrie, abbiamo z0 = d (P0, Π).
22
Intersezione tra sfere e piani (2/4)
In tale sistema di riferimento S ha equazione
Quindi S ∩ Π è l’insieme delle soluzioni del sistema
2 2 2 20
0
⎧⎪ + = −⎪⎨⎪ =⎪⎩
x y R zz
( )22 2 20: .+ + − =S x y z z R
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 12
23
Intersezione tra sfere e piani (3/4)
Abbiamo tre casi:
Se z0 > R, S ∩ Π = ∅;
Se z0 = R, S ∩ Π = {(0, 0, R )} è un punto;
Se z0 < R, S ∩ Π = C è la circonferenza contenuta nel piano z = 0 di centro O e raggio .2 2
0−R z
24
Intersezione tra sfere e piani (4/4)
Dati una sfera S = S (P0, R ), un piano Π e posto d = d (P0, Π) si ha:
Se d > R, Π è esterno a S ;
Se d = R, allora S ∩ Π è un punto P e Π ètangente a S in P ;
Se d < R, allora S ∩ Π è la circonferenza C di centro pΠ (P0) (proiezione di P0 su Π) e raggio
in Π.2 2−R d
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 13
25
Piano tangente
Se S = S (P0, R ) è una sfera e P ∈ S, il piano tangente tgp (S ) a S in P è il piano passante per P con direzione ortogonale a P – P0.
Infatti in questo caso d (P, Π) = d (P, P0) = R, quindi P = pΠ (P0) e d (Q, P0) > R se Q ∈ Π e Q ≠ P. Dunque S ∩ Π = {P }.
26
Esempio
Se S : x 2 + y 2 + z 2 – 2x + 4y – 6z + 3 = 0, Sha centro P0 = (1, -2, 3) e P = (2, -1, 0) ∈ S.Poiché P – P0 = (1, 1, -3),
( ) : 3 1 0.+ − − =Ptg S x y z
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 14
27
Intersezione di sfere (1/4)
Se S1 : x 2 + y 2 + z 2 + a1x + b1y + c1z + d1 = 0 e S2 : x 2 + y 2 + z 2 + a2x + b2y + c2z + d2 = 0 sono sfere,
2 2 21 1 1 1
1 2 2 2 22 2 2 2
0:
0
⎧⎪ + + + + + + =⎪∩ ⎨⎪ + + + + + + =⎪⎩
x y z a x b y c z dS S
x y z a x b y c z d
28
Intersezione di sfere (2/4)
Sottraendo la prima equazione alla seconda abbiamo il sistema equivalente
Il piano
si dice piano radicale di S1 e S2.
( ) ( ) ( )
2 2 21 1 1 1
2 1 2 1 2 1 2 1
0
0
⎧⎪ + + + + + + =⎪⎨⎪ − + − + − + − =⎪⎩
x y z a x b y c z da a x b b y c c z d d
( ) ( ) ( )2 1 2 1 2 1 2 1 0− + − + − + − =a a x b b y c c z d d
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 15
29
Intersezione di sfere (3/4)
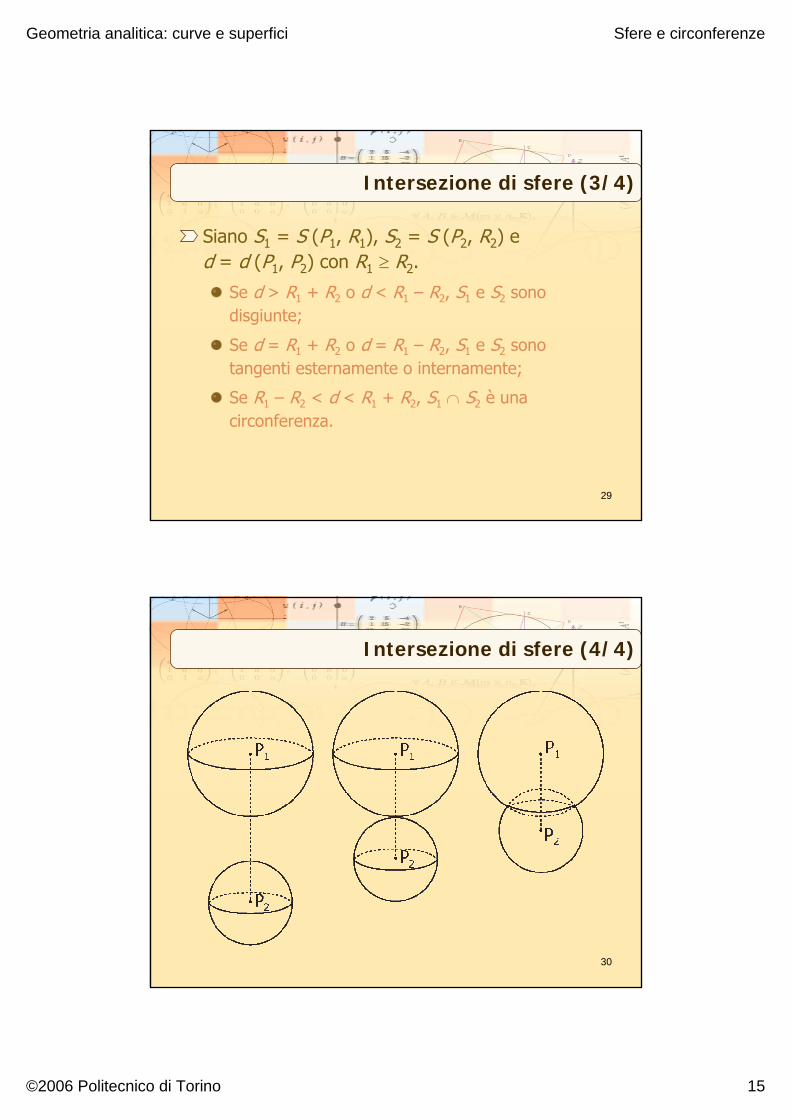
Siano S1 = S (P1, R1), S2 = S (P2, R2) e d = d (P1, P2) con R1 ≥ R2.
Se d > R1 + R2 o d < R1 – R2, S1 e S2 sono disgiunte;
Se d = R1 + R2 o d = R1 – R2, S1 e S2 sono tangenti esternamente o internamente;
Se R1 – R2 < d < R1 + R2, S1 ∩ S2 è una circonferenza.
30
Intersezione di sfere (4/4)
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 16
31
Esempio (1/2)
S1 : x 2 + y 2 + z 2 – 2x + 4y – 6z – 2 = 0 e S2 : x 2 + y 2 + z 2 – 2x + 2y – 4z – 3 = 0, sono le sfere di centri P1 = (1, -2, 3), P2 = (1, -1, 2) e raggi R1 = 4 e R2 = 3 rispettivamente.Quindi R1 – R2 = 1 < d (P1, P2) = < R1 + R2 = 7 e S1 ∩ S2 è una circonferenza C.
2
32
Esempio (2/2)
Il piano radicale di S1 e S2 è Π: 2y – 2z + 1 = 0, da cui
Osserviamo che si può studiare S1 ∩ S2 tramite questa rappresentazione.
2 2 2 2 4 6 2 0:
2 2 1 0
⎧⎪ + + − + − − =⎪⎨⎪ − + =⎪⎩
x y z x y zCy z
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 17
33
Intersezione tra sfere e rette (1/2)
Se S = S (P0, R ) è una sfera e r è una retta, possiamo ragionare come nel caso dei piani.
Se d (P0, r ) > R allora S ∩ r = ∅ e r èesterna a S ;
Se d (P0, r ) = R allora S ∩ r è un punto P e rè tangente a S in P ;
Se d (P0, r ) < R allora S ∩ r sono due punti e rè secante S.
34
Intersezione tra sfere e rette (2/2)
Osserviamo che una retta r passante per P ètangente a S se e solo se r ⊆ tgP (S ).
Per determinare i punti di intersezione quando esistono, conviene parametrizzare la retta e sostituire nell’equazione di S.
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 18
35
Esempio
Siano S : x 2 + y 2 + z 2 + 2x – 2z – 1 = 0 e
Sostituendo otteniamo 3t 2 – 3 = 0, da cui t = ± 1 e S ∩ r = {(0, 1, 2), (-2, -1, 0)}.
1:
1
⎧ = −⎪⎪⎪⎪ =⎨⎪⎪ = +⎪⎪⎩
x tr y t
z t
Sfere e circonferenze
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 19
37
Circonferenze in forma cartesiana (1/4)
Sia S : x 2 + y 2 + z 2 + ax + by + cz + d = 0 la sfera di raggio R e centro P0. Sia Π : αx + βy + γz + δ = 0 un piano tale che d0 = d (P0, Π) < R.
Quindi S ∩ Π è la circonferenza C di centro Q0 = pΠ (P0) e raggio in Π.2 2
0= −r R d
38
Circonferenze in forma cartesiana (2/4)
Il sistema
rappresenta la circonferenza C in forma cartesiana.
2 2 2 00
⎧⎪ + + + + + + =⎪⎨⎪ + + + =⎪⎩
x y z ax by cz dx y zα β γ δ
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 20
39
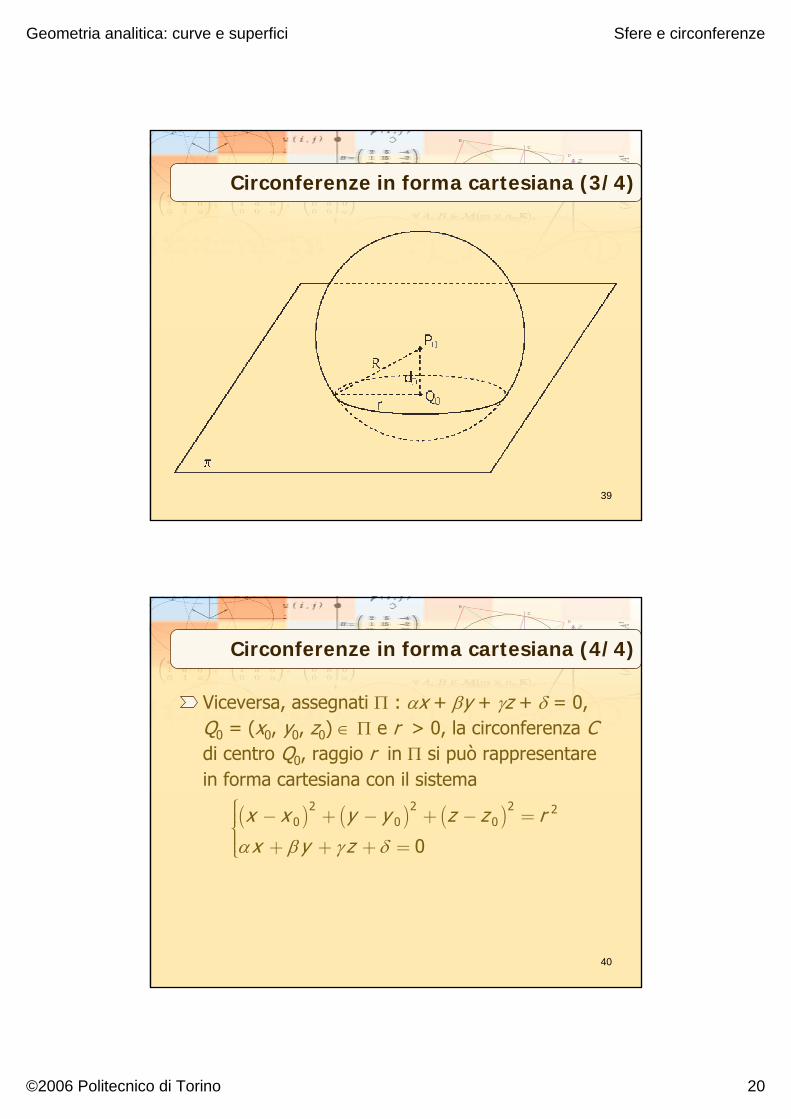
Circonferenze in forma cartesiana (3/4)
40
Circonferenze in forma cartesiana (4/4)
Viceversa, assegnati Π : αx + βy + γz + δ = 0, Q0 = (x0, y0, z0) ∈ Π e r > 0, la circonferenza Cdi centro Q0, raggio r in Π si può rappresentare in forma cartesiana con il sistema
( ) ( ) ( )2 2 2 20 0 0
0
⎧⎪ − + − + − =⎪⎨⎪ + + + =⎪⎩
x x y y z z r
x y zα β γ δ
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 21
41
Cerchi massimi
Se S è la sfera di centro P0 e raggio R e se Π èun piano tale che P0 ∈ Π, la circonferenza C = S ∩ Π si dice cerchio massimo di S in Π.
È immediato che C ha centro P0 e raggio R.
42
Esempio (1/3)
S : x 2 + y 2 + z 2 + 2x – 2y – 2 = 0 è la sfera di centro P0 = (-1, 1, 0) e raggio R = 2. Se Π : 2x – 2y + z + 1 = 0, allora d0 = d (P0, Π) = 1 < R e C = S ∩ Π è una circonferenza in Π di equazioni
2 2 2 2 2 2 0:
2 2 1 0
⎧⎪ + + + − − =⎪⎨⎪ − + + =⎪⎩
x y z x yCx y z
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 22
43
Esempio (2/3)
Il raggio di C è
Se s : t (2, -2, 1) + (-1, 1, 0) è la retta ortogonale a Π per P0, il centro di C è
2 20 1.= − =r R d
01 1 1
, , .3 3 3
⎛ ⎞⎟⎜∏= ∩ = − ⎟⎜ ⎟⎜⎝ ⎠Q s
44
Esempio (3/3)
Viceversa, la circonferenza C di centro
e raggio r = 1
in Π : 2x – 2y + z + 1 = 0 si può rappresentarecome cerchio massimo in Π della sfera con stessi centro e raggio:
2 2 21 1 11
: 3 3 32 2 1 0
⎧⎪⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎪ ⎟ ⎟ ⎟⎜ ⎜ ⎜⎪ + + − + − =⎟ ⎟ ⎟⎪⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎨⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎪⎪⎪ − + + =⎪⎩
x y zC
x y z
01 1 1
, ,3 3 3
⎛ ⎞⎟⎜= − ⎟⎜ ⎟⎜⎝ ⎠Q
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 23
45
Circonferenza per tre punti
Se P0, P1, P2 sono punti non allineati, esiste una sola circonferenza C passante per tali punti. Per i = 1, 2 siano:
Π il piano per P0, P1, P2;
Mi il punto medio tra P0 e Pi ;
Πi il piano per Mi con direzione ortogonale Pi – P0.
Allora C è la circonferenza di centro Q0 = Π ∩ Π1 ∩ Π2 e raggio R = d (P0, Q0) in Π.
46
Esempio (1/2)
Se P0 = (1, 1, -2), P1 = (1, -1, 0), P2 = (-1, 3, -2), allora
Π : x + y + z = 0;
P1 – P0 = (0, -2, 2) e P2 – P0 = (-2, 2, 0);
M1 = (1, 0, -1) e M2 = (0, 2, -2).
Quindi Π1 : y – z – 1 = 0 e Π2 : x – y + 2 = 0.

Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 24
47
Esempio (2/2)
Si verifica che
Q0 = Π ∩ Π1 ∩ Π2 = (-1, 1, 0) e
Quindi
2 2 .=R
( ) ( )2 2 21 1 8:
0.
x y zCx y z
⎧⎪ + + − + =⎪⎨⎪ + + =⎪⎩
48
Retta tangente a una circonferenza
Se C = S ∩ Π è una circonferenza e se P ∈ C, allora la retta tgP (C ) tangente a C in P èl’intersezione del piano Π con il piano tangente tgP (S ) alla sfera S in P.

Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 25
49
Esempio
Se
e
P ∈ C e tgP (S ) : x – y – z – 2 = 0, quindi
2 2 2 2 2 0:
0
⎧⎪ + + − − =⎪⎨⎪ + + =⎪⎩
x y z zCx y z
( )1, 1,0 ,= −P
( )2 0
:0.P
x y ztg C
x y z⎧ − − − =⎪⎪⎨⎪ + + =⎪⎩
Sfere e circonferenze
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 26
51
Circonferenze in forma parametrica (1/5)
Sia C ⊂ una circonferenza di centro O e raggio R nel piano Π. Poiché O ∈ Π, abbiamo Π : ax + by + cz = 0, quindi Π è un sottospazio vettoriale di di dimensione 2.
Allora esiste una base ortonormale di Π, cioè una base {X1, X2} tale che e
3
1 2 1= =X X
3
1 2 0.⋅ =X X
52
Circonferenze in forma parametrica (2/5)
Se X ∈ Π, esistono unici c1, c2 ∈ tali che X = c1X1 + c2X2. Abbiamo
( ) ( )21 1 2 2 1 1 2 2
2 22 2 2 21 1 2 2 1 2 1 2 1 22
= + ⋅ + =
+ + ⋅ = +
X c X c X c X c X
c X c X c c X X c c

Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 27
53
Circonferenze in forma parametrica (3/5)
Si ha che X ∈C se e solo se X ∈ Π equindi se e solo se
Pertanto X ∈ C se e solo seper
2 2 2 21 2= + =X c c R
1 2cos sen = +X R X R Xθ θ
2 2,X R=
)0 2 .⎡∈ ⎣θ π
54
Circonferenze in forma parametrica (4/5)
In generale, se C è la circonferenza nel piano Π di centro P0 e raggio R, siano
Π0 il piano parallelo a Π e raggio R e passante per O ;
C0 la circonferenza di centro O e raggio R in Π0;
{X1, X2} una base ortonormale di Π0.
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 28
55
Circonferenze in forma parametrica (5/5)
Se è la traslazione di P0, vale
Quindi abbiamo la parametrizzazione di C
( ) 1 2 0cos sen ,= + +P R X R X Pθ θ θ 0, 2 .⎡ ⎤∈ ⎣ ⎦θ π
( )0 0= +Pt X X P
( )0 0 .=Pt C C
56
Esempio (1/2)
Sia C la circonferenza di centro P0 = (1, -1, 1) e raggio R = 3 in Π : x + y + z - 1 = 0.
Una base ortonormale di Π0 : x + y + z = 0 è
( ) ( )1 21 1
1, 1,0 , 1,1, 2 .2 6
⎧ ⎫⎪ ⎪⎪ ⎪= − = −⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭X X
Geometria analitica: curve e superfici Sfere e circonferenze
©2006 Politecnico di Torino 29
57
Esempio (2/2)
Abbiamo la parametrizzazione
( )
3 3cos sen 1
22
3 3: cos sen 1
22
6 sen 1
⎧⎪⎪ = + +⎪⎪⎪⎪⎪⎪⎪= =− + −⎨⎪⎪⎪⎪⎪⎪⎪ +=−⎪⎪⎩
x
C P y
z
θ θ
θ θ θ
θ


















