Geometria analitica: rette e piani -...
35
Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie ©2006 Politecnico di Torino 1 Geometria analitica: rette e piani 2 Cambiamenti di coordinate e isometrie Coordinate polari Cambiamenti di riferimento nel piano Cambiamenti di riferimento in generale Isometrie Simmetrie Isometrie nel piano Isometrie nello spazio
Transcript of Geometria analitica: rette e piani -...

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 1
Geometria analitica: rette e piani
2
Cambiamenti di coordinate e isometrie
Coordinate polariCambiamenti di riferimento nel piano Cambiamenti di riferimento in generale Isometrie Simmetrie Isometrie nel piano Isometrie nello spazio

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 2
Cambiamenti di coordinate e isometrie
4
Coordinate polari (1/3)
Sia r una retta nel piano e sia O un punto di r . Per ogni punto P ≠O del piano è definito l’angolo α ∈[0, 2π) (misurato in senso antiorario) tra la retta r e la retta per O e P. Se ρ è la lunghezza del segmento allora P è determinato univocamente da ρ e α.
OP

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 3
5
Coordinate polari (2/3)
Se P = (x, y ) ∈ , abbiamo Inoltre, se P ≠O, esiste un unico angolo α ∈[0 2π) tale che
dove n (P ) indica il normalizzato di P.
2 2 2 .x yρ = +
( ) ( )α α2 2 2 2
, cos ,senx yn P
x y x y
⎛ ⎞⎟⎜ ⎟⎜= =⎟⎜ ⎟⎜ ⎟⎜ + +⎝ ⎠
6
Coordinate polari (3/3)
Quindi \{O } è in corrispondenza biunivoca con l’insieme delle coppie (ρ, α), con ρ > 0, α ∈ [0, 2π). Se P = (x, y ) ∈ , abbiamo
(ρ, α) sono le coordinate polari di P.
Osserviamo che per ρ = 0 otteniamo (0, 0) per qualsiasi α.
2
2
cossen
xy
ρ αρ α
⎧ =⎪⎪⎨⎪ =⎪⎩

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 4
7
Esempio
Se P = (1, -1), abbiamo ρ = ,
da cui Infatti
( ) 1 1,
2 2n P
⎛ ⎞⎟⎜= − ⎟⎜ ⎟⎟⎜⎝ ⎠2
7.
4α π=
( ) 7 71, 1 2 cos , 2sen .
4 4π π
⎛ ⎞⎟⎜− = ⎟⎜ ⎟⎜⎝ ⎠
Cambiamenti di coordinate e isometrie

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 5
9
Considerazioni preliminari
Abbiamo visto che un sistema di riferimento Oxynel piano permette di identificare il piano con Considerare un altro sistema di riferimento O’x’y’significa quindi dare una “nuova” identificazione nel piano con Nelle applicazioni della geometria è spesso utile poter esprimere le “nuove” coordinate (x’ , y’ ) di un punto P in funzione delle coordinate “originarie” (x, y ).
2.
2.
10
Esempio (1/7)
Le rette ortogonali r1 : x – y = 0 e r2 : x + y – 2 = 0 definiscono 4 sistemi di riferimento possibili con origine O’ nel puntoP0 = r1 ∩ r2 = (1, 1): tali sistemi differiscono solo per l’orientamento degli assi, e quindi le possibili nuove coordinate differiranno tra loro solo per i segni.

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 6
11
Esempio (2/7)
Per fissare l’orientamento del nuovo sistema di riferimento è sufficiente indicare quale deve essere il quadrante positivo H + in tale sistema, cioè l’insieme dei punti
H + sarà espresso come intersezione di uno dei semipiani determinati da r1 con uno di quelli determinati da r2.
{ ' 0, ' 0}.H x y+ = > >
12
Esempio (3/7)
Per esempio, porre H + = {(x, y ) | x – y < 0, x + y – 2 > 0}
significa che i punti con coordinate (x’ , y’ ) positive dovranno essere quelli del quadrante in figura.
In pratica, se un punto soddisfa alle disequazioni date allora tutto il quadrante contenente quel punto le soddisfa: nel nostro caso basta verificare per (0, 3).

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 7
13
Esempio (4/7)
Dato P = (x, y ), per la definizione di sistema di riferimento le nuove coordinate (x’ , y’ ) di Psoddisferanno a
2
1
1' ( , ) 2
21
' ( , )2
x d P r x y
y d P r x y
⎧⎪⎪ = = + −⎪⎪⎪⎨⎪⎪ = = −⎪⎪⎪⎩
14
Esempio (5/7)

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 8
15
Esempio (6/7)
In base alla scelta di H + abbiamo
cioè
( )
( )
1' 2
21
'2
x x y
y x y
⎧⎪⎪ = + −⎪⎪⎪⎨⎪⎪ = − +⎪⎪⎪⎩
' 1 11 2' 1 12 0
x xy y
⎛ ⎞⎛ ⎞ ⎛ ⎞⎛ ⎞ − ⎟⎜⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎟= +⎟ ⎟ ⎟ ⎜⎜ ⎜ ⎜ ⎟⎟ ⎟ ⎟ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎟⎜−⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠
16
Esempio (7/7)
Posto
possiamo verificare che N è una matrice ortogonale di ordine 2, cioè che tNN = I2, e che
1 11 11 2 21 1 1 12
2 2
N
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎛ ⎞ ⎜ ⎟⎜⎟⎜ ⎟= =⎟ ⎜⎜ ⎟⎟ ⎜⎟ ⎟⎜−⎝ ⎠ ⎜ ⎟⎟⎜− ⎟⎜ ⎟⎜⎝ ⎠
01 1 112 .1 1 120
NP⎛ ⎞ ⎛ ⎞⎛ ⎞− ⎟⎜ ⎟ ⎟⎜ ⎜⎟ = =−⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎟ ⎟⎜ ⎜⎟⎜ −⎝ ⎠⎝ ⎠⎝ ⎠

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 9
17
Formula di cambiamento di riferimento
In generale, se Oxy e O’x’y’ sono sistemi di riferimento nel piano e P0 = (x0, y0) è il vettore di
che rappresenta O’ in Oxy, esiste una
matrice ortogonale tale che
2
(2)a b
N Oc d⎛ ⎞⎟⎜= ∈⎟⎜ ⎟⎟⎜⎝ ⎠
( )00
0
'' .
'xx a b x
X N X Pyy c d y
⎛ ⎞⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎟⎜ ⎟⎟ ⎟ ⎟ ⎜⎜ ⎜ ⎜ ⎟= = − = −⎟⎟ ⎟ ⎟⎜ ⎜⎜ ⎜ ⎜ ⎟⎟⎟ ⎟ ⎟⎜⎟ ⎟ ⎟ ⎜ ⎟⎜ ⎜ ⎜ ⎟⎜⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
Cambiamenti di coordinate e isometrie
Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 10
19
Siano datiUn sistema di riferimento Oxy nel piano.Una matrice ortogonale N di ordine 2
P0 = (x0, y0) ∈
Sistemi di riferimento e matrici ortogonali (1/3)
.a b
Nc d⎛ ⎞⎟⎜= ⎟⎜ ⎟⎟⎜⎝ ⎠
2.
20
Allora la relazione
definisce un sistema di riferimento O’x’y’ nel piano tale che O’ ha coordinate (x0, y0) in Oxye gli assi hanno in Oxy equazioni
Sistemi di riferimento e matrici ortogonali (2/3)
0
0
''
xx a b xyy c d y
⎛ ⎞⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎟⎜ ⎟⎟ ⎟ ⎟ ⎜⎜ ⎜ ⎜ ⎟= − ⎟⎟ ⎟ ⎟⎜ ⎜⎜ ⎜ ⎜ ⎟⎟⎟ ⎟ ⎟⎜⎟ ⎟ ⎟ ⎜ ⎟⎜ ⎜ ⎜ ⎟⎜⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
( ) ( )1 0 0: 0,r c x x d y y− + − =
( ) ( )2 0 0: 0.r a x x b y y− + − =

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 11
21
Poiché N ∈ O (2), le righe di N sono versori ortogonali tra loro, cioè (c, d ) = ± (-a, b ).
Questo ci dice che r1 e r2 sono le retti passanti per P0 di direzioni (a, b ) e (-b, a ) rispettivamente.
Osserviamo che le direzioni degli assi sono definite dalle righe di N. Tali righe formano una base ortonormale B di e la matrice di cambiamento di coordinate MB relativa a B è tN.
Sistemi di riferimento e matrici ortogonali (3/3)
2
22
Se posto
le equazioni in Oxy degli assi di O’x’y’ sono r1 : 2x – y – 2 = 0 e r2 : x + 2y – 1 = 0 (mentre in O’x’y’ sono ovviamente r1 : y’ = 0, r2 : x’ = 0!).
Esempio
1 21,
2 15N
⎛ ⎞⎟⎜= ⎟⎜ ⎟⎟⎜ −⎝ ⎠( )0 1,0 ,P =
' 1' 0
x xN
y y
⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎟⎜⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎟= −⎟ ⎟ ⎟⎜⎜ ⎜ ⎜ ⎟⎟ ⎟ ⎟⎜⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎟⎜⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 12
23
Siano Oxyz è un sistema di riferimento nello spazio, N ∈ O (3) una matrice ortogonale di ordine 3 e P0 = (x0, y0, z0) ∈ . Analogamente a quanto visto per il piano, la formula
definisce un nuovo sistema di riferimento O’x’y’z’nello spazio.
Cambiamenti di riferimento nello spazio (1/2)
0
0
0
'''
x x xy N y yz z z
⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎟⎜⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎟⎟ ⎟ ⎟⎜⎜ ⎜ ⎜ ⎟⎟ ⎟ ⎟⎜⎜ ⎜ ⎜ ⎟= −⎟ ⎟ ⎟⎜⎜ ⎜ ⎜ ⎟⎟ ⎟ ⎟⎜⎜ ⎜ ⎜ ⎟⎟ ⎟ ⎟⎜ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
3
24
L’origine O’ di O’x’y’z’ è il punto P0 di coordinate (x0, y0, z0) in Oxyz mentre gli assi r1, r2, r3 sono rette per P0 con direzioni le righe [N ]1, [N ]2, [N ]3
di N.
Cambiamenti di riferimento nello spazio (2/2)

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 13
25
Sia
Allora O’ = P0 = (1, -1, 0), r1 :t (1, 1, 0) + (1, -1, 0), r2 :u (-1, 1, 0) + (1, -1, 0), r3 :v (0, 0, 1) + (1, -1, 0).
Esempi (1/4)
1 10
2 2' 11 1
' 0 12 2' 0
0 0 1
x xy yz z
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎛ ⎞⎟⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎟⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎜ ⎟ ⎟⎟ ⎟ ⎟⎜⎜ ⎜ ⎜⎜ ⎟ ⎟⎟ ⎟ ⎟⎜⎜ ⎜ ⎜⎟⎜ ⎟= − − −⎟ ⎟ ⎟⎜⎜ ⎜ ⎜⎟ ⎟⎜⎟ ⎟ ⎟⎜⎟⎜ ⎜ ⎜ ⎟⎜⎟ ⎟ ⎟⎜⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎜ ⎝ ⎠⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜⎜⎝ ⎠
26
Viceversa, consideriamo le rette r1 : t (1, 1, 1) + (0, 1, 0), r2 : u (2, -1, -1) + (0, 1, 0) e r3 : v (0, 1, -1) + (0, 1, 0).Tali rette sono ortogonali e si intersecano in P0 = (0, 1, 0).
Esempi (2/4)
Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 14
27
Sia
la matrice ortogonale la cui riga [N ]i è il versore ottenuto normalizzando il vettore di direzione di ri , per i = 1, 2, 3.
Esempi (3/4)
1 1 13 3 32 1 15 5 5
1 10
2 2
N
⎛ ⎞⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎟⎜= − − ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟−⎜ ⎟⎟⎜⎜⎝ ⎠
28
Posto X = (x, y, z ) e X’ = (x’ , y’ , z’ ), X’ = N (X – P0) è un cambiamento di coordinate con O’ = P0 e assi r1, r2, r3.
Osserviamo che possiamo ottenere tutti i cambiamenti di coordinate con r1, r2, r3
come assi x’ , y’ , z’ rispettivamente cambiando segni ai versori [N ]i . Poiché per ogni direzione ci sono due possibili versi, abbiamo 6 cambiamenti di questo tipo.
Esempi (4/4)

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 15
Cambiamenti di coordinate e isometrie
30
Se N ∈ O (n) e P0 ∈ , la formula di cambiamento di coordinate definisce l’applicazione data da f (X ) = N (X – P0).
Se f1(X ) = X – P0 e f2(X ) = NX, allora f ècomposizione di f1 e f2, cioè(X ) = f2(f1(X )) = f2 o f1 (X ).
Questa considerazione ci porta a studiare più nel dettaglio le applicazioni di tipo f1 e f2.
Cambiamenti di riferimento come applicazione
n
: n nf →

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 16
31
Se P ∈ , l’applicazione tp : definita da tp (X ) = X + P si dice traslazione di P.
EsempitO è l’applicazione identica Id.
Se P = (2, -1), tP ((x, y )) = (x + 2, y - 1).
Se P = (-1, 1, -3), tP ((x, y, z )) = (x - 1, y + 1, z - 3).
Traslazioni
n n n→
32
La composizione di traslazioni è la traslazione di vettore la somma dei vettori delle traslazioni:tP o tQ = tQ o tP = tP +Q .
Le traslazioni sono invertibili con inversa la traslazione di vettore opposto:tP o t-P = t-P o tP = tO = Id e (tP)-1 = t-P .
Le traslazioni conservano le distanze in :d (tP (X ), tP (Y )) = d (X, Y ).
Proprietà delle traslazioni
n

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 17
33
Se N ∈ O (n ) è una matrice ortogonale, l’applicazione lN : definita da lN (X ) = NXsi dice applicazione ortogonale associata a N : osserviamo che per N = In , lN è l’applicazione identica Id.
Le proprietà delle applicazioni ortogonali derivano direttamente da quelle delle matrici ortogonali.
Applicazioni ortogonali
n n→
34
La composizione di applicazioni ortogonali èl’applicazione ortogonale associata al prodotto delle matrici associate: o =
Le applicazioni ortogonali sono invertibili con inversa l’applicazione associata alla matrice inversa
e
Le applicazioni ortogonali conservano le distanze in
Proprietà delle applicazioni ortogonali
2Nl 1Nl 2 1.N Nl
1 1 o o N NN Nl l l l Id− −= = 1
1( ) .N Nl l −
− =
: ( ( ), ( )) ( , ).nN Nd l X l Y d X Y=

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 18
35
Una isometria di è un’applicazione invertibile che conserva le distanze, cioè tale
che d (f (X ), f (Y )) = d (X, Y ) per ogni X, Y ∈ . Valgono le seguenti proprietà:
La composizione di isometrie è una isometria.
L’inversa di una isometria è una isometria.
Isometrie (1/2)
n
: n nf →n
36
Le traslazioni e le applicazioni ortogonali sono isometrie. Quindi, se N ∈ O (n ) e P ∈ , l’applicazione f : definita da f (X ) = tP o lN = NX + P è una isometria. Viceversa vale il seguente.
Teorema. Se f : è una isometria, allora esistono una matrice ortogonale N ∈ O (n ) e P ∈ tali che f (X ) = NX + P.
Isometrie (2/2)
n
n n→
n
n n→

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 19
37
Siano f (X ) = NX + P e g (X ) = MX + Qisometrie di .
(g o f ) (X ) = MNX + MP + Qf -1 (X ) = N -1(X – P ) = tN (X – P ) = tN X – tNP
Composizione e inverse di isometrie
n
38
Se X’ = N (X – P0) è un cambiamento di riferimento in , l’applicazione f (X ) = N (X – P0) = lN o t-P èl’isometria f (X ) = NX – NP0 = NX + P con P = -NP0.
Viceversa, una isometria f (X ) = NX + P determina il cambiamento di riferimento X’ = N (X – P0) ponendo X’ = f (X ) e P0 = NP.
Conseguenza importante: tutte le proprietà metriche di un sottoinsieme del piano o dello spazio restano invariate cambiando il sistema di riferimento.
Cambiamenti di riferimento e isometrie
n
Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 20
39
Abbiamo visto che le isometrie coincidono con i cambiamenti di riferimento. Possiamo pensare a due interpretazioni equivalenti della stesso concetto:
Con un cambiamento di riferimento, il piano o lo spazio sono identificati in due modi diversi con
Con una isometria, stabiliamo una corrispondenza biunivoca tra due “copie” di in modo che siano conservate le distanze.
Osservazione
.n
n
Cambiamenti di coordinate e isometrie

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 21
41
Se P0 ∈ , il simmetrico di un punto P ∈rispetto a P0 è il punto tale che il punto medio di P e è P0.
L’applicazione è una isometria detta simmetria centrale di centro P0.
Se E ⊂ e si dice che P0 è centro di simmetria per E e che E è simmetrico rispetto a P0.
Simmetrie centrali (1/2)
0( )P Pσ
n
0( )P Pσ
n
0: n n
Pσ →
0( ) ,P E Eσ =
n
42
Dalla definizione precedente abbiamo
Abbiamo quindi l’isometria
Esempi
Simmetrie centrali (2/2)
( ) ( )0 02 .P nX I X Pσ = − +
( )( )0012 PP P Pσ= + ( )0 02 .P P P Pσ =− +da cui
( )( ) ( )
( )( ) ( )(0,0)
(3, 1)
, , ,
, 6, 2
x y x y
x y x y
σ
σ −
= − −
= − + − −
( )( ) ( )(1, 2,0) , , 2, 4, .x y z x y zσ − = − + − − −
e

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 22
43
Se r è una retta in , il simmetrico di un punto P ∈ rispetto a r è il punto tale che, se s è la retta passante per P e , allora s ⊥ re r ∩ s è il punto medio di P e .
L’applicazione è una isometria detta simmetria assiale di asse r.Se E ⊂ e si dice che r è asse di simmetria per E e che E è simmetrico rispetto a r.
Simmetrie assiali
n
n
: n nrσ →
( )r Pσn
( )r Pσ( )r Pσ
( )r E Eσ =
44
è simmetrico rispetto a O e agli assi x = 0 e y = 0 ma non rispetto a (1, -1) e alla retta x – y = 0.
Esempio
( ){ }2 2 2, | 4 1E x y x y= ∈ + =

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 23
45
Se π è un piano in , il simmetrico P ∈rispetto a π è il punto tale che, se s è la retta per P e , allora s ⊥ π e s ∩ π è il punto medio di P e
L’applicazione è una isometria detta simmetria rispetto al piano π.
Se E ∈ e si dice che π è piano di simmetria per E e che E è simmetrico rispetto a π.
Simmetrie rispetto a un piano
3
n
πσ3 3: →
πσ ( )P
( )E Eπσ =
3
πσ ( )Pπσ ( ).P
46
Le condizioni che definiscono sono equivalenti alle seguenti:
Il punto medio di P e giace in r.
Sostituendo π a r abbiamo l’analogo per
Utilizzeremo queste condizioni per scrivere esplicitamente tali simmetrie.
Osservazione
σ ( )r P
πσ ( ).P
( ) .r P P rσ − ⊥
σ ( )r P

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 24
Cambiamenti di coordinate e isometrie
48
Ricordiamo che le matrici ortogonali 2 x 2 sono di due tipi:
per
Richiami sulle matrici ortogonali di ordine 2 (1/3)
θθ θθ θ
cos sensen cos
R⎛ ⎞− ⎟⎜= ⎟⎜ ⎟⎟⎜⎝ ⎠
θθ θθ θ
cos sensen cos
S⎛ ⎞⎟⎜= ⎟⎜ ⎟⎟⎜ −⎝ ⎠
oppure
θ π0 2 .≤ <

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 25
49
e
e
Richiami sulle matrici ortogonali di ordine 2 (2/3)
( )θ 1D R = ( ) 1.D S θ =−
0 2 01 0
, ,0 1
R I S⎛ ⎞⎟⎜= = ⎟⎜ ⎟⎟⎜ −⎝ ⎠ 2 0, , R I S Sπ π=− =−
/ 2 /20 1 0 1
, .1 0 1 0
R Sπ π
⎛ ⎞ ⎛ ⎞− ⎟ ⎟⎜ ⎜= =⎟ ⎟⎜ ⎜⎟ ⎟⎟ ⎟⎜ ⎜⎝ ⎠ ⎝ ⎠
( )θ θ1 .S S−=( ) 1
2,R R R R R R Rθ φ φ θ θ φ θ π θ−
+ −= = =
50
hanno autovalori che per sono complessi coniugati. Quindi se
l’unico vettore fisso (cioè tale che ) è O.
Le hanno autovalori ±1. Quindi l’autospaziorelativo a 1 è formato da vettori fissi.
Dato identificheremo con e le applicazioni ortogonali definite da tali matrici.
Richiami sulle matrici ortogonali di ordine 2 (3/3)
θR θθ θcos isen ie ±± =θ 0≠ θ 0≠
R X Xθ =
θS
)θ π0,2⎡∈ ⎣ θR θS

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 26
51
Per studiare il significato geometrico di usiamo le coordinate polari: sia con e . Allora
Rotazioni di centro l’origine (1/2)
θR( ) ( )α α, cos , senx y r r=
0r > )α π0,2⎡∈ ⎣
cos sen cossen cos sen
x rR
y rθθ θ αθ θ α
⎛ ⎞ ⎛ ⎞⎛ ⎞−⎟ ⎟ ⎟⎜ ⎜ ⎜= =⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜⎝ ⎠ ⎝ ⎠⎝ ⎠
( )( )
coscos cos sen sensen cos cos sen
r rsen
α θθ α θ αθ α θ α α θ
⎛ ⎞+⎛ ⎞− ⎟⎜⎟⎜ ⎟⎜=⎟⎜ ⎟⎜⎟⎟⎜ ⎟+ ⎟⎝ ⎠ ⎜ +⎝ ⎠
52
Quindi è una rotazione (in senso antiorario) di centro O e angolo .
Rotazioni di centro l’origine (2/2)
θθR

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 27
53
Per abbiamo rispettivamente
l’identità, la rotazione di un angolo retto e lasimmetria di centro l’origine.
Esempi
0, , 2πθ π=
02
, , x x x y x x
R R Ry y y x y yπ π
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞− −⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎜ ⎜ ⎜= = =⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎜ ⎜ ⎜⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎜ ⎜ ⎜−⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
54
In generale, la rotazione nel piano di centro P0 e angolo è l’isometria f che ha come solo punto fisso il punto P0. Allora f è della forma
Infatti il sistema èequivalente a . Poiché l’unico punto fisso di è O, l’unico punto fisso di f èX = P0.
Rotazioni
0 0 0 0( ) ( ) .f X R X P P R X R P Pθ θ θ= − + = − +
θ
θ 0 0( )R X P P X− + =
θ 0 0( )R X P X P− = −
θR

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 28
55
La rotazione di centro (1, 1) e angolo è
Esempio
( )( ) / 41 1 1 11 2 1, .1 1 1 12 1
x xf x y R
y yπ
⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞− − + ⎟⎜⎟ ⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎜ ⎟= + = +⎟ ⎟ ⎟ ⎟ ⎜⎜ ⎜ ⎜ ⎜ ⎟⎟ ⎟ ⎟ ⎟ ⎜⎟ ⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎜ ⎟⎜−⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠
π4
56
In la simmetria centrale di centro P0 è la rotazione di angolo π e centro P0.
Osserviamo che in questo caso, la formula delle rotazioni coincide con la formula delle simmetrie centrali, in quanto e
Simmetrie centrali nel piano
2 σ0P
( )0 0 02 .R X P P X Pπ − + =− +2R Iπ =−

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 29
57
Sia e sia la simmetria assiale di asse r . Se le condizioni
si esprimono col sistema
Esempio (1/3)
( )( ) ( )σ , ', 'r x y x y=σ r: 2 1 0r x y+ − =
( )r P P rσ − ⊥ ( )( )12 r P P rσ + ∈e
' 2'
' '2 1 0
2 2
x xy y
x x y y
λλ
⎧⎪⎪ − =⎪⎪⎪ − =⎪⎪⎨ ⎛ ⎞⎪ + +⎪ ⎟⎜ + − =⎟⎪ ⎜ ⎟⎜⎪ ⎝ ⎠⎪⎪⎪⎩
58
Quindi e
Esempio (2/3)
( )λ 14 2 2
5x y=− + −
( )
( )
1' 3 4 4
51
' 4 3 25
x x y
y x y
⎧⎪⎪ =− + −⎪⎪⎪⎨⎪⎪ =− − −⎪⎪⎪⎩

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 30
59
Ponendo
abbiamo . Osserviamo che N èortogonale con D (N ) = -1, quindi per un
Esempio (3/3)
3 41,
5 4 3N
⎛ ⎞⎟⎜=− ⎟⎜ ⎟⎟⎜ −⎝ ⎠
( )σ r X NX P= +
415 2
P⎛ ⎞⎟⎜= ⎟⎜ ⎟⎟⎜⎝ ⎠
θN S=
)θ π0 2 .⎡∈ ⎣
60
In generale la simmetria assiale nel piano di asse r è l’isometria f che ha come punti fissi tutti e soli i punti di r ed è del tipo
Le simmetrie assiali con asse passante per l’origine coincidono con le applicazioni associate alle matrici : in tal caso l’asse èl’autospazio relativo a 1.
Simmetrie assiali nel piano
( ) θ .f X S X P= +
( ) ,f X S Xθ=
θS
Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 31
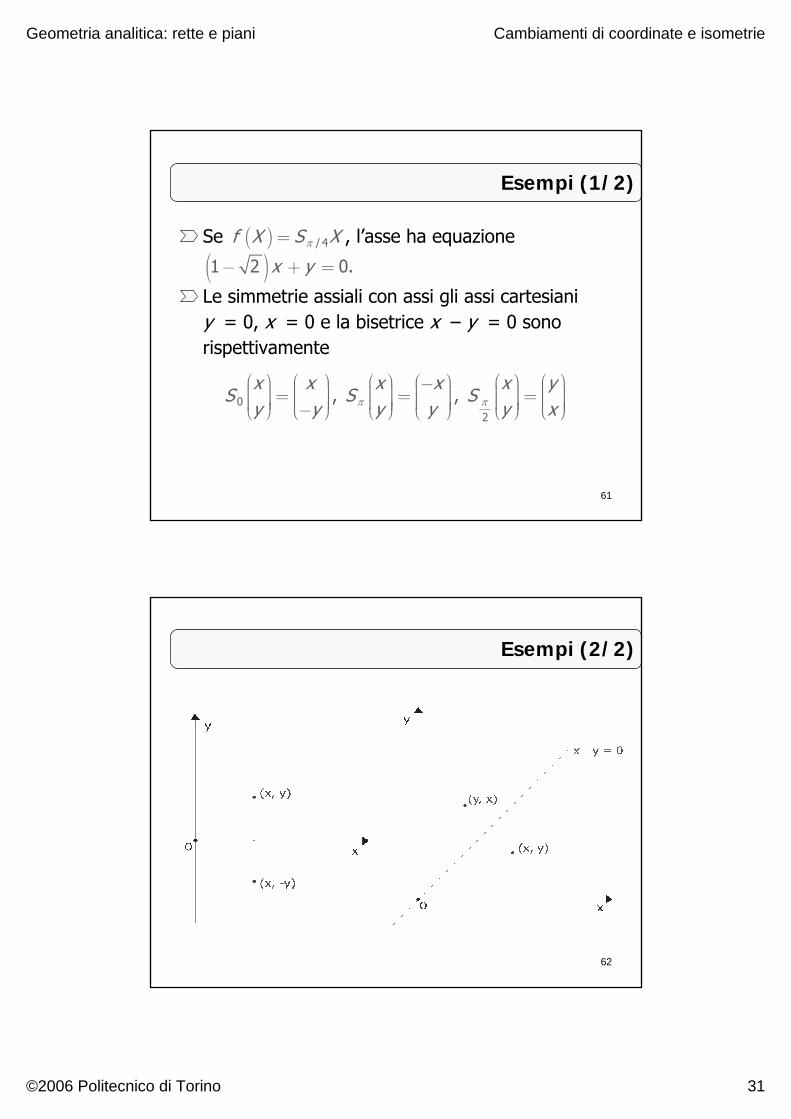
61
Se , l’asse ha equazione
Le simmetrie assiali con assi gli assi cartesiani y = 0, x = 0 e la bisetrice x – y = 0 sono rispettivamente
Esempi (1/2)
( ) π / 4f X S X=
( )1 2 0.x y− + =
02
, , x x x x x y
S S Sy y y y y xπ π
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞−⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎜ ⎜ ⎜= = =⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎜ ⎜ ⎜⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎟ ⎟ ⎟ ⎟ ⎟ ⎟⎜ ⎜ ⎜ ⎜ ⎜ ⎜−⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
62
Esempi (2/2)
Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 32
Cambiamenti di coordinate e isometrie
64
Sia una retta e . Se e se π è il piano per P ortogonale a r , consideriamo il punto ottenuto da P con una rotazione in π di centro e angolo (in senso antiorario).
L’applicazione è una isometria detta rotazione assiale di angolo e asse di rotazione r . Se e per ogni si dice che Eè una figura di rotazione con asse r .
Rotazioni assiali
3r ⊂ )θ π0 2⎡∈ ⎣3P ∈
( )θ,rR Pπ r∩ θ
θ3 3
, :rR →θ
3E ⊂ ( )θ,rR E E= θ

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 33
65
Se rz è l’asse delle z, abbiamo
Rotazione attorno agli assi coordinati (1/3)
( )( )θ θ
θ θθ θ,
cos sen 0, , sen cos 0 , .
0 0 1zr
xx
R x y z y R zy
z
⎛ ⎞⎛ ⎞− ⎟ ⎟⎜ ⎜ ⎛ ⎞⎛ ⎞⎟ ⎟⎜ ⎜ ⎟⎟ ⎟ ⎜ ⎟⎜⎜ ⎜ ⎟= =⎟ ⎟ ⎟⎜ ⎜⎜ ⎜ ⎟⎟ ⎟ ⎟⎜ ⎟⎜ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎝ ⎠⎝ ⎠⎜ ⎜⎟ ⎟⎟ ⎟⎜ ⎜⎝ ⎠⎝ ⎠
66
Infatti, se P0 = (x0, y0, z0), il piano π per P0
ortogonale all’asse delle z ha equazione e .
Il punto ottenuto con una rotazione di centro Q e angolo è allora dato da
da cui la formula per .
Rotazione attorno agli assi coordinati (2/3)
0: 0z zπ − = π 0(0,0, )Q r z= ∩ =
θ
( )θ θ θ θ0 0 0 0 0cos sen ,sen cos ,x y x y z− +
θ,rR

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 34
67
Analogamente
definiscono le rotazione attorno agli assi delle x e delle y rispettivamente.
Rotazione attorno agli assi coordinati (3/3)
θ θθ θθ θ θ θ
1 0 0 cos 0 sen0 cos sen , 0 1 00 sen cos sen 0 cos
⎛ ⎞ ⎛ ⎞−⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜− ⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜⎟ ⎟⎟ ⎟⎜ ⎜⎝ ⎠ ⎝ ⎠
68
Sia π : x – y + z – 1 = 0. Posto analogamente alle
simmetrie assiali nel piano abbiamo:
da cui
Simmetrie rispetto a un piano (1/3)
( )( ) ( )πσ , , ', ', ' ,x y z x y z=
( ) ( ) ( )
'''
1 1 1' ' ' 1 0
2 2 2
x xy yz z
x x y y z z
λλ
λ
⎧ − =⎪⎪⎪⎪ − =−⎪⎪⎪⎨ − =⎪⎪⎪⎪ + − + + + − =⎪⎪⎪⎩
( )λ 21 .
3x y z= − + − +

Geometria analitica: rette e piani Cambiamenti di coordinate e isometrie
©2006 Politecnico di Torino 35
69
Sostituendo otteniamo
Si verifica che la matrice N è ortogonale e che D (N ) = -1.
Simmetrie rispetto a un piano (2/3)
( )( )πσ1 2 2 1
1 2, , 2 1 2 1 .
3 32 2 1 1
xx y z y NX P
z
⎛ ⎞⎛ ⎞ ⎛ ⎞− ⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜= + − = +⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜−⎝ ⎠⎝ ⎠ ⎝ ⎠
70
Le simmetrie rispetto ai piani z = 0, y = 0 e x = 0 sono date rispettivamente da
Simmetrie rispetto a un piano (3/3)
1 0 00 1 0 ,0 0 1
x xy yz z
⎛ ⎞⎛ ⎞ ⎛ ⎞⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜=⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜− −⎝ ⎠⎝ ⎠ ⎝ ⎠
1 0 00 1 0 ,0 0 1
x xy yz z
⎛ ⎞⎛ ⎞ ⎛ ⎞⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜− = −⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜⎝ ⎠⎝ ⎠ ⎝ ⎠
1 0 00 1 0 .0 0 1
x xy yz z
⎛ ⎞⎛ ⎞ ⎛ ⎞− −⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜=⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎜ ⎜ ⎜⎟ ⎟ ⎟⎟ ⎟ ⎟⎜ ⎜ ⎜⎝ ⎠⎝ ⎠ ⎝ ⎠