Geometria analitica nel piano -...
46
3 Geometria analitica nel piano 3.0 Scopi del capitolo Nel Capitolo 2 abbiamo identificato l’insieme dei numeri reali R con i punti di una retta. Ora stabiliamo una corrispondenza biunivoca fra i punti P del piano e le coppie ordinate di numeri reali [a, b]. Più precisamente, diremo che un sistema di riferimento cartesiano nel piano è costituito da due assi come in Figura 3.1. Questa terminologia rappresenta un omaggio al grande matematico e filosofo francese René De- scartes (Cartesio) che, intorno alla metà del secolo XVII, introdusse questi sistemi di riferimento e li applicò allo studio di vari problemi geometrici. Per i nostri scopi possiamo assumere che gli assi siano ortogonali fra loro e orientati come nella Figura 3.1. Tradizionalmente, l’asse orizzontale è indicato come asse x, mentre quello verticale come asse y . Il numero reale a, corrispondente alla proiezione ortogonale di P sull’asse x, è detto ascissa di P , mentre b (corrispondente alla proiezione ortogona- le di P sull’asse y ) si chiama ordinata di P . La coppia ordinata di numeri reali [a, b] rappresenta le coordinate cartesiane di P (in seguito, le chiame-
Transcript of Geometria analitica nel piano -...
3Geometria analitica nelpiano3.0 Scopi del capitolo
Nel Capitolo 2 abbiamo identificato l’insieme dei numeri reali R con ipunti di una retta. Ora stabiliamo una corrispondenza biunivoca fra ipunti P del piano e le coppie ordinate di numeri reali [a, b].Più precisamente, diremo che un sistema di riferimento cartesiano nelpiano è costituito da due assi come in Figura 3.1. Questa terminologiarappresenta un omaggio al grande matematico e filosofo francese René De-scartes (Cartesio) che, intorno alla metà del secolo XVII, introdusse questisistemi di riferimento e li applicò allo studio di vari problemi geometrici.Per i nostri scopi possiamo assumere che gli assi siano ortogonali fra loroe orientati come nella Figura 3.1. Tradizionalmente, l’asse orizzontale èindicato come asse x, mentre quello verticale come asse y.Il numero reale a, corrispondente alla proiezione ortogonale di P sull’assex, è detto ascissa di P , mentre b (corrispondente alla proiezione ortogona-le di P sull’asse y) si chiama ordinata di P . La coppia ordinata di numerireali [a, b] rappresenta le coordinate cartesiane di P (in seguito, le chiame-

3.0 Scopi del capitolo 77
x
yIII
III IV
O
Pb
a
Figura 3.1 – Sistema di riferimento cartesiano per il piano.
remo semplicemente coordinate di P ). L’origine O è il punto di coordinate[0, 0]. Useremo la scrittura R2 per denotare il piano munito di un sistemadi riferimento cartesiano come in Figura 3.1 (si noti che, dal punto di vistastrettamente insiemistico, R2 corrisponde al prodotto cartesiano R×R).Si può anche notare che il piano risulta suddiviso in quattro quadranti,tradizionalmente chiamati I, II, III e IV, come indicato nella Figura 3.1(anche, rispettivamente, primo quadrante, secondo quadrante etc.). Adesempio, il primo quadrante corrisponde all’insieme
I ={
[x, y] ∈ R2 : x, y ≥ 0}
.
Notiamo anche che, su ciascuno dei due assi, è fissata un’unità di misura:quando la necessità di realizzare una data figura lo renderà opportuno,useremo un’unità di misura sull’asse y diversa rispetto a quella fissata sul-l’asse x.
La geometria analitica consiste nello studio delle proprietà geometrichedelle varie figure attraverso l’uso delle coordinate. In questo capitoloimpareremo i primi concetti fondamentali che ci consentiranno, in par-ticolare, di descrivere rette, circonferenze e parabole attraverso opportuneequazioni. Gli argomenti di questo capitolo rivestono un ruolo centrale nelnostro lavoro. In particolare, forniscono strumenti chiave per approfondi-re sia la geometria classica introdotta nel Capitolo 1, sia lo studio delle

78 Geometria analitica nel piano
funzioni che abbiamo iniziato nel Capitolo 2: più precisamente, nel §3.2illustreremo il concetto di grafico di una funzione. Infine, va detto che lostudio critico e consapevole della geometria analitica costituisce, a nostroavviso, una delle migliori palestre per allenare la mente al ragionamentomatematico.
3.1 Equazioni di circonferenze e rette
Al fine di acquisire maggiore confidenza con l’uso delle coordinate svolgia-mo un paio di semplici esercizi preliminari.
◃ Esercizio 3.1. Siano P0 = [x0, y0] e P1 = [x1, y1] due punti di R2.
(i) Esprimere la distanza tra P0 e P1 in funzione delle loro coordinate.
(ii) Esplicitare le coordinate del punto medio M del segmento P0 P1 infunzione delle coordinate di P0 e di P1.
Soluzione. Possiamo avvalerci della rappresentazione grafica in Figura 3.2,
x
y
P0
M
P1
y0
yM
y1
x0 xM x1
x1−x0
y 1−y 0
Q1
Q2
Q3
Figura 3.2 – Lunghezza di un segmento e coordinate del punto medio.
da cui deduciamo:(i) Applicando il Teorema di Pitagora al triangolo rettangolo △P0 Q1 P1 siottiene:
dist(P0, P1) =√
(x1 − x0)2 + (y1 − y0)2 . (3.1.1)

3.1 Equazioni di circonferenze e rette 79
(ii) Dalla congruenza dei triangoli △P0 Q3 M e △M Q2 P1 deduciamo che xM èequidistante da x0 e x1, per cui l’ascissa xM vale:
xM = (x0 + x1)/2 .
Ragionando in modo simile per l’ordinata yM si ricava
M = [xM , yM ] =[x0 + x1
2,y0 + y1
2
]
. (3.1.2)
▹
Osservazione 3.1. Nell’Esercizio 3.1 abbiamo dato una risposta a domandedi chiara natura geometrica utilizzando le coordinate. Questo fornisce unaprima idea del metodo di lavoro proprio della geometria analitica.
◃ Esercizio 3.2. Siano P0 = [2, 2] e P1 = [5, 6]. Calcolare la distanza traP0 e P1, e il punto medio M del segmento P0 P1.
Soluzione. Applicando (3.1.1) e (3.1.2), si trova
dist(P0, P1) = 5 , M =[7
2, 4]
.
▹
Affrontiamo ora un primo problema significativo: descrivere una circon-ferenza mediante l’uso delle coordinate. Per fissare le idee, supponiamodi dover descrivere la circonferenza γ avente centro C = [x0, y0] e raggioR > 0 assegnati. Geometricamente, secondo la Definizione 1.1, possiamoscrivere
γ ={
P ∈ R2 : dist(P,C) = R}
. (3.1.3)
Ora, indichiamo con P = [x, y] il generico punto di R2. Usando la formula(3.1.1) che fornisce la distanza fra due punti, è immediato constatare chela (3.1.3) equivale a
γ ={
[x, y] ∈ R2 :√
(x− x0)2 + (y − y0)2 = R}
. (3.1.4)
A parole, ciò vuol dire che i punti di γ sono esattamente quei punti di R2
che soddisfano la condizione√
(x− x0)2 + (y − y0)2 = R . (3.1.5)
80 Geometria analitica nel piano
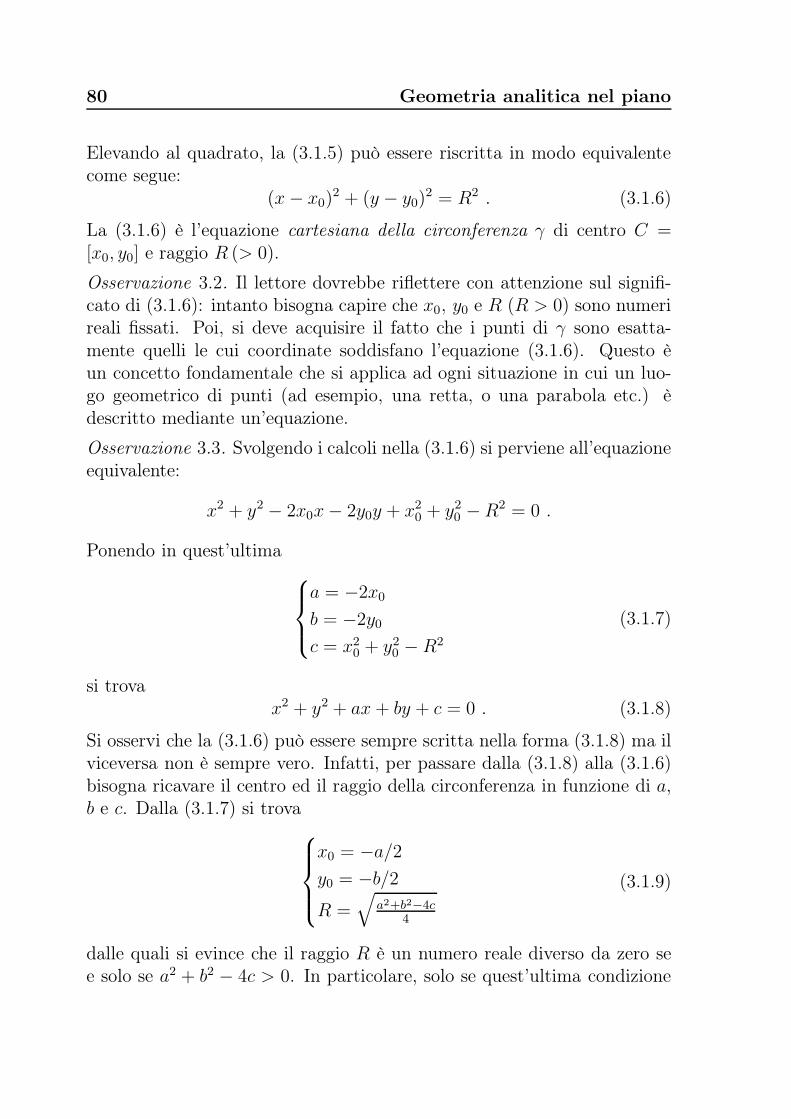
Elevando al quadrato, la (3.1.5) può essere riscritta in modo equivalentecome segue:
(x− x0)2 + (y − y0)
2 = R2 . (3.1.6)
La (3.1.6) è l’equazione cartesiana della circonferenza γ di centro C =[x0, y0] e raggio R (> 0).
Osservazione 3.2. Il lettore dovrebbe riflettere con attenzione sul signifi-cato di (3.1.6): intanto bisogna capire che x0, y0 e R (R > 0) sono numerireali fissati. Poi, si deve acquisire il fatto che i punti di γ sono esatta-mente quelli le cui coordinate soddisfano l’equazione (3.1.6). Questo èun concetto fondamentale che si applica ad ogni situazione in cui un luo-go geometrico di punti (ad esempio, una retta, o una parabola etc.) èdescritto mediante un’equazione.
Osservazione 3.3. Svolgendo i calcoli nella (3.1.6) si perviene all’equazioneequivalente:
x2 + y2 − 2x0x− 2y0y + x20 + y20 −R2 = 0 .
Ponendo in quest’ultima⎧
⎪
⎨
⎪
⎩
a = −2x0
b = −2y0c = x2
0 + y20 − R2
(3.1.7)
si trovax2 + y2 + ax+ by + c = 0 . (3.1.8)
Si osservi che la (3.1.6) può essere sempre scritta nella forma (3.1.8) ma ilviceversa non è sempre vero. Infatti, per passare dalla (3.1.8) alla (3.1.6)bisogna ricavare il centro ed il raggio della circonferenza in funzione di a,b e c. Dalla (3.1.7) si trova
⎧
⎪
⎪
⎨
⎪
⎪
⎩
x0 = −a/2
y0 = −b/2
R =√
a2+b2−4c4
(3.1.9)
dalle quali si evince che il raggio R è un numero reale diverso da zero see solo se a2 + b2 − 4c > 0. In particolare, solo se quest’ultima condizione

3.1 Equazioni di circonferenze e rette 81
è soddisfatta la (3.1.8) descrive una circonferenza (se a2 + b2 − 4ac = 0 ,allora la (3.1.8) rappresenta un solo punto; se invece a2 + b2 − 4ac < 0 ,allora la (3.1.8) non è verificata da alcun punto del piano cartesiano).
◃ Esercizio 3.3. (i) Scrivere l’equazione della circonferenza γ di cen-tro C = [3, 1] e raggio 5.
(ii) Siano P1 = [1, 3], P2 = [2, 4], P3 = [0, 5]: stabilire quale fra questi 3punti appartiene a γ.
Soluzione. (i) Applicando la (3.1.6) troviamo che l’equazione di γ è:
(x− 3)2 + (y − 1)2 = 25 . (3.1.10)
(ii) Sostituendo le coordinate di P1 nel membro a sinistra dell’equazione (3.1.10)abbiamo:
(1− 3)2 + (3− 1)2 = 8 ̸= 25 ,
per cui le coordinate di P1 non soddisfano la (3.1.10) e quindi P1 ̸∈ γ. Proce-dendo in modo simile per P2 si ottiene
(2− 3)2 + (4− 1)2 = 10 ̸= 25 ,
per cui anche P2 ̸∈ γ. Infine, lo stesso tipo di verifica per P3 fornisce
(0− 3)2 + (5− 1)2 = 25 ,
per cui si conclude che P3 ∈ γ.▹
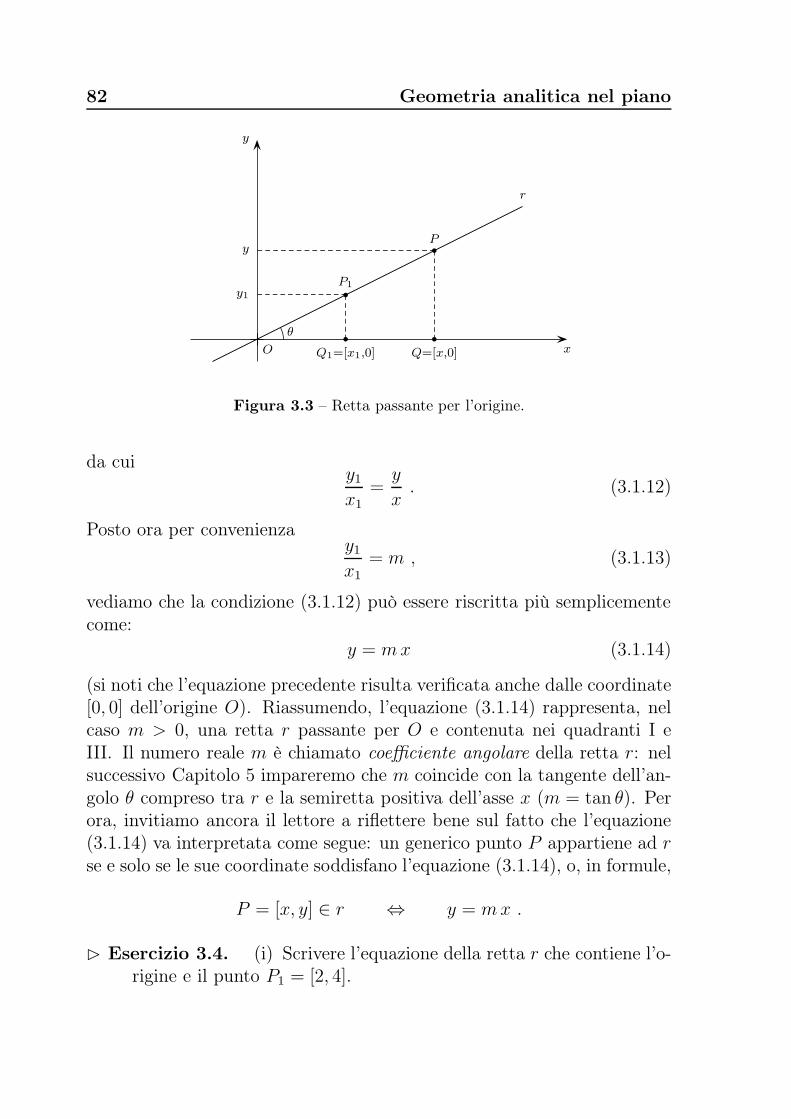
Adesso procediamo per arrivare a descrivere le rette in R2 mediante op-portune equazioni. Con riferimento alla Figura 3.3, iniziamo a trattareil caso di una retta r passante per l’origine O, non parallela ad un assecartesiano e contenuta nei quadranti I e III.Una tale retta è univocamente individuata dalla assegnazione di un puntoP1 = [x1, y1] ∈ r, P1 ̸= O. Come in Figura 3.3, sia P = [x, y] un genericopunto di r nel primo quadrante, e siano poi Q1 e Q rispettivamente leproiezioni ortogonali di P1 e P sull’asse x (per semplicità, trattiamo il casoin cui P1 e P si trovano nel primo quadrante: le osservazioni necessarieper trattare i rimanenti casi sono lasciate al lettore). Dalla similitudinedei due triangoli △OP1Q1 e △OPQ segue che:
y1 : x1 = y : x , (3.1.11)
82 Geometria analitica nel piano
x
y
P1
P
O
y1
y
Q1=[x1,0] Q=[x,0]
r
θ
Figura 3.3 – Retta passante per l’origine.
da cuiy1x1
=y
x. (3.1.12)
Posto ora per convenienzay1x1
= m , (3.1.13)
vediamo che la condizione (3.1.12) può essere riscritta più semplicementecome:
y = mx (3.1.14)
(si noti che l’equazione precedente risulta verificata anche dalle coordinate[0, 0] dell’origine O). Riassumendo, l’equazione (3.1.14) rappresenta, nelcaso m > 0, una retta r passante per O e contenuta nei quadranti I eIII. Il numero reale m è chiamato coefficiente angolare della retta r: nelsuccessivo Capitolo 5 impareremo che m coincide con la tangente dell’an-golo θ compreso tra r e la semiretta positiva dell’asse x (m = tan θ). Perora, invitiamo ancora il lettore a riflettere bene sul fatto che l’equazione(3.1.14) va interpretata come segue: un generico punto P appartiene ad rse e solo se le sue coordinate soddisfano l’equazione (3.1.14), o, in formule,
P = [x, y] ∈ r ⇔ y = mx .
◃ Esercizio 3.4. (i) Scrivere l’equazione della retta r che contiene l’o-rigine e il punto P1 = [2, 4].

3.1 Equazioni di circonferenze e rette 83
(ii) Siano P2 = [3, 2] e P3 = [1, 2]. Stabilire se questi due punti appar-tengono a r.
Soluzione. (i) In questo caso
m =4
2= 2 ,
per cui l’equazione di r èr : y = 2x .
(ii) Il lettore non dovrebbe avere difficoltà a verificare che P2 ̸∈ r, mentre P3 ∈ r.▹
Ora un ragionamento perfettamente analogo a quello illustrato sopra con-sente di arrivare a descrivere una retta passante per l’origine, e contenutanei quadranti II e IV, ancora con (3.1.14), ma con m < 0. Pertanto sipuò affermare, riassumendo questa discussione, che una generica retta rpassante per l’origine, diversa dall’asse y, si rappresenta con l’equazione
y = mx , dove m ∈ R (3.1.15)
(si noti che, nel caso in cui m = 0, r coincide con l’asse x). Dal ra-gionamento precedente abbiamo dovuto escludere l’asse y, perché questocorrisponderebbe alla situazione (non accettabile) in cui x1 = 0 in (3.1.12).Osservando che i punti dell’asse y sono tutti e solo quelli che hanno la pri-ma coordinata (ascissa) nulla, il lettore non dovrebbe avere dubbi sul fattoche l’equazione dell’asse y è semplicemente:
x = 0 . (3.1.16)
◃ Esercizio 3.5. Sia r la retta di equazione y = 3x. Scrivere l’equazionedella retta r′ che contiene il punto P ′ = [1, 5] ed è parallela a r.
Soluzione. Aiutiamoci costruendo una visualizzazione grafica del problema,come in Figura 3.4. Nella figura si può osservare che i punti di r′ si ottengonoda quelli di r mediante un’opportuna traslazione verticale: in pratica, incremen-tando di un’opportuna quantità fissa il valore dell’ordinata (y) dei punti di r.Indicando con b (∈ R) questa quantità, deduciamo che l’equazione che governal’appartenenza a r′ è:
y = 3x+ b . (3.1.17)

84 Geometria analitica nel piano
Ora, per calcolare il valore di b, è sufficiente imporre che le coordinate di P ′
soddisfino la (3.1.17). Otteniamo
5 = 3 · 1 + b ,
da cui si ricava subito b = 2. In conclusione, l’equazione di r′ è:
r′ : y = 3x+ 2 .
x
y
P ′
5
3
1O
r′ r
b
Figura 3.4 – Rette parallele e traslazioni verticali.
▹
Generalizzando il contenuto dell’esercizio precedente possiamo affermareche
y = mx+ b m, b ∈ R (3.1.18)
rappresenta l’equazione di una generica retta di R2, non parallela all’assey, ed è anche chiamata equazione esplicita della retta.
Osservazione 3.4. L’Esercizio 3.5 ci permette di concludere che due rettesono parallele se e solo se hanno lo stesso coefficiente angolare.
Per acquisire una maggiore familiarità con questi importanti concetti svol-giamo ora alcuni esercizi illustrativi.
◃ Esercizio 3.6. Sia P = [2, 3].

3.1 Equazioni di circonferenze e rette 85
(i) Scrivere l’equazione della retta r1 passante per P e parallela all’assex;
(ii) Scrivere l’equazione della retta r2 passante per P e parallela all’assey.
Soluzione. Le rette richieste sono rappresentate nella Figura 3.5: in particola-re, vediamo che la condizione che esprime l’appartenenza di un generico puntoP a r1 è semplicemente che l’ordinata di P sia uguale a 3. Pertanto l’equazionedi r1 è y = 3. Analogamente, si ottiene l’equazione di r2: x = 2.
x
y
P
r2
r1
2
3
Figura 3.5 – Rette parallele agli assi.
▹
◃ Esercizio 3.7. Siano P1 = [2, 1] e P2 = [3, 3]. Determinare l’equazionedella retta r che contiene P1 e P2.
Soluzione. Per risolvere questo esercizio possiamo procedere in due modidistinti: per via puramente algebrica, oppure ragionando geometricamente.Risoluzione per via algebrica: grazie a quanto ottenuto in (3.1.18), possiamoaffermare che l’equazione di r è della forma:
r : y = mx+ b ,
dove i coefficienti incogniti m e b possono essere determinati imponendo chele coordinate dei due punti P1 e P2 soddisfino l’equazione della retta r. Piùprecisamente, l’appartenenza di P1 a r equivale alla condizione:
1 = m · 2 + b , (3.1.19)
mentre l’appartenenza di P2 a r corrisponde a:
3 = m · 3 + b . (3.1.20)

86 Geometria analitica nel piano
Sottolineiamo che i coefficienti incogniti m e b devono soddisfare entrambe leequazioni (3.1.19) e (3.1.20). In questi casi si utilizza la simbologia seguente:
{
1 = m · 2 + b3 = m · 3 + b
(3.1.21)
e si dice che (3.1.21) è un sistema di equazioni nelle due incognite m e b. Ingenerale, lo studio dei sistemi di equazioni è alquanto complesso; ma, nella nostrasemplice situazione, è invece facile pervenire alla sua soluzione mediante sempliciconsiderazioni algebriche. Infatti possiamo ricavare, dalla prima equazione in(3.1.21),
b = 1− 2m . (3.1.22)
Sostituendo questa informazione nella seconda equazione di (3.1.21) deduciamoche:
3 = 3m+ (1− 2m) ,
da cui ricaviamo immediatamente
m = 2 . (3.1.23)
Usando (3.1.23) in (3.1.22) concludiamo che
b = 1− 2 · 2 ,
da cuib = −3 . (3.1.24)
Ne segue che l’equazione della retta r richiesta è:
r : y = 2x− 3 . (3.1.25)
A titolo di verifica ulteriore, il lettore può controllare sia il fatto che le coordinatedi P1 e P2 soddisfano (3.1.25), sia la validità di entrambe le equazioni in (3.1.21)quando b = −3 e m = 2.Risoluzione per via geometrica: visualizziamo la situazione attraverso laFigura 3.6 dove abbiamo tracciato la retta r′ parallela alla retta r e passanteper l’origine. Le rette r′ e r sono parallele per costruzione, quindi, per l’Os-servazione 3.4, hanno lo stesso coefficiente angolare m. Sfruttando la simili-tudine dei triangoli △OP ∗Q∗ e △P1P2Q in Figura 3.6, grazie alla costruzione(3.1.11)–(3.1.14) possiamo dedurre che
m =P ∗Q∗
OQ∗ =P2Q
P1Q=
(3− 1)
(3− 2)= 2 .

3.1 Equazioni di circonferenze e rette 87
Poi, dato che r deve contenere P1 = [2, 1],si ricava:
r : y = 2x− 3 = 2(x− 2) + 1 , (3.1.26)
risultato che coincide con (3.1.25).
x
y
P1Q
P2
P ∗
Q∗ 2 3
1
3
r′ r
O
Figura 3.6 – Equazione di una retta passante per due punti assegnati.
▹
A margine dell’esercizio precedente proponiamo una breve riflessione sulmetodo di lavoro: è importante, quando si studia un problema matemati-co, abituarsi ad usare tutte le conoscenze a propria disposizione, confron-tando fra loro risultati eventualmente ottenuti mediante procedimenti di-versi, anche cercando di controllarne la coerenza; ciò favorisce una miglioreassimilazione dei metodi impiegati ed aiuta ad elaborare utili relazioni tratutte le nozioni utilizzate.Detto questo, il lettore è ora invitato a procedere autonomamente adun importante sforzo di rielaborazione dei contenuti dell’Esercizio 3.7: ilrisultato finale deve essere la soluzione completa dell’esercizio successivo.
◃ Esercizio 3.8. Siano P1 = [x1, y1] e P2 = [x2, y2] due generici punti diR2, (P1 ̸= P2).
(i) Determinare l’equazione della retta r che contiene P1 e P2.
(ii) Determinare l’equazione della generica retta r che contiene P1.

88 Geometria analitica nel piano
Soluzione. (i) Caso x1 ̸= x2:
m =y2 − y1x2 − x1
(3.1.27)
e
r : y =
[
y2 − y1x2 − x1
]
(x− x1) + y1 . (3.1.28)
Caso x1 = x2 (retta parallela all’asse y):
r : x = x1 . (3.1.29)
(ii) La generica retta passante per P1 (non parallela all’asse y) è:
r : y = m(x− x1) + y1 , dove m ∈ R . (3.1.30)
La retta r passante per P1 e parallela all’asse y è invece la (3.1.29).▹
Anche l’esercizio seguente è molto importante.
◃ Esercizio 3.9. Siano
r : y = mx+ b e r′ : y = m′x+ b′
due rette e supponiamo che esse siano perpendicolari fra loro, con m ̸= 0.Determinare la relazione tra i loro coefficienti angolari m e m′.
Soluzione. Dato che rette parallele hanno uguale coefficiente angolare non èrestrittivo supporre1 che il punto di intersezione tra r e r′ sia l’origine O. Quindipossiamo semplicemente limitarci a studiare il caso:
r : y = mx e r′ : y = m′x .
Facendo riferimento alla Figura 3.7, vediamo che
θ = θ′ , (3.1.31)
in quanto entrambi complementari dello stesso angolo α. Ora, scegliendo duepunti P1 = [x1, y1] ∈ r, P ′
1 = [x′1, y′1] ∈ r′ come in Figura 3.7, dalla (3.1.31)
deduciamo che i due triangoli
△OP1Q1 e △OP ′1Q
′1
1Basta traslare le due rette in modo che il loro punto di intersezione coincida conl’origine.

3.1 Equazioni di circonferenze e rette 89
sono simili. Ne segue chey1x1
=−x′1y′1
. (3.1.32)
D’altra parte:
m =y1x1
; m′ =y′1x′1
. (3.1.33)
Quindi la (3.1.32) può essere riscritta nel modo seguente:
m = − 1
m′
(
oppure m′ = − 1
m
)
, (3.1.34)
che fornisce la relazione richiesta.
x
y
P ′1
P1Q′
1
Q1
rr′
αθ
θ′
O
Figura 3.7 – Rette perpendicolari: legame tra i rispettivi coefficienti angolari.
▹
◃ Esercizio 3.10. Siano P = [−3, 2] e r la retta di equazione
y = 2x+ 5 .
Determinare l’equazione della retta r′ passante per P e perpendicolare ar.
Soluzione. In virtù della (3.1.34) possiamo subito dire che il coefficienteangolare m′ di r′ è dato da:
m′ = − 1
m= − 1
2.

90 Geometria analitica nel piano
Quindi l’equazione di r′ è della forma:
r′ : y = − 1
2x+ b .
Ora il valore di b può essere agevolmente calcolato imponendo il passaggio di r′
per P . Si ottiene
2 = − 1
2· (−3) + b ,
da cui si ricava b = 1/2 e quindi
r′ : y = − 1
2x+
1
2.
▹
Osservazione 3.5. Un analisi attenta delle (3.1.28)–(3.1.29) mostra chel’equazione di una retta può essere riscritta come
ax+ by + c = 0 , (3.1.35)
con a, b, c ∈ R e a, b non entrambi nulli. La (3.1.35) prende il nome diequazione implicita della retta.
Per completare questo quadro introduttivo allo studio delle rette nel pianocartesiano, inseriamo ora un esercizio in cui siamo costretti ad anticipa-re la definizione di valore assoluto (si veda il §3.2) ed alcune proprietàdella funzione radice quadrata (si veda il Capitolo 4): rimandare eventual-mente la lettura di questo esercizio ad una fase successiva non pregiudicacomunque la comprensione del resto del presente capitolo.
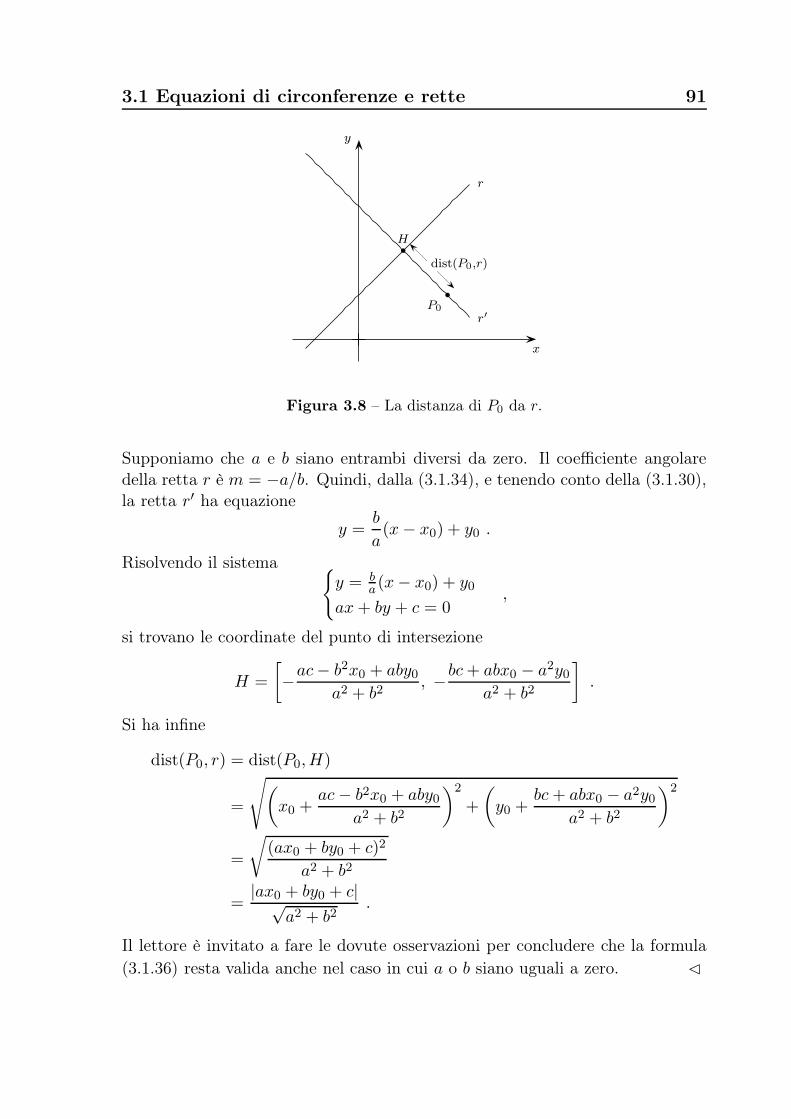
◃ Esercizio 3.11 (*). Sia P0 = [x0, y0] e sia r la retta di equazioneax+ by + c = 0. Mostrare che la distanza di P0 dalla retta r è data da
dist(P0, r) =|ax0 + by0 + c|√
a2 + b2, (3.1.36)
dove con |ax0 + by0 + c| si è indicato il valore assoluto della quantitàax0 + by0 + c secondo la definizione che daremo nella (3.2.11).
Soluzione. Sia r′ la retta per P0 ortogonale alla retta r. Chiamata con Hl’intersezione di r e r′, si ha che dist(P0, r) = dist(P0,H) (si veda la Figura 3.8).
3.1 Equazioni di circonferenze e rette 91
x
y
dist(P0,r)
P0
H
r′
r
Figura 3.8 – La distanza di P0 da r.
Supponiamo che a e b siano entrambi diversi da zero. Il coefficiente angolaredella retta r è m = −a/b. Quindi, dalla (3.1.34), e tenendo conto della (3.1.30),la retta r′ ha equazione
y =b
a(x− x0) + y0 .
Risolvendo il sistema{
y = ba(x− x0) + y0
ax+ by + c = 0,
si trovano le coordinate del punto di intersezione
H =
[
−ac− b2x0 + aby0a2 + b2
, −bc+ abx0 − a2y0a2 + b2
]
.
Si ha infine
dist(P0, r) = dist(P0,H)
=
√
(
x0 +ac− b2x0 + aby0
a2 + b2
)2
+
(
y0 +bc+ abx0 − a2y0
a2 + b2
)2
=
√
(ax0 + by0 + c)2
a2 + b2
=|ax0 + by0 + c|√
a2 + b2.
Il lettore è invitato a fare le dovute osservazioni per concludere che la formula(3.1.36) resta valida anche nel caso in cui a o b siano uguali a zero. ▹

92 Geometria analitica nel piano
◃ Esercizio 3.12. Calcolare la distanza del punto P0 = [1, 2] dalla rettar di equazione y = x− 1.
Soluzione. Per primo riscriviamo l’equazione della retta nella forma implicita(3.1.35):
x− y − 1 = 0 .
Adesso, utilizzando la (3.1.36), si trova
dist(P0, r) =|1− 2− 1|√
12 + (−1)2=
2√2.
▹
3.2 Grafici di funzioni nel piano cartesiano
In questo paragrafo per prima cosa stabiliamo un collegamento direttotra la geometria analitica e lo studio di funzioni che abbiamo iniziatonel Capitolo 2. Poi, acquisiremo maggiore padronanza dei vari concettiintrodotti attraverso lo studio di simmetrie e traslazioni.
Definizione 3.1. Siano A, B ⊆ R. Data una funzione f : A → B, il suografico è il sottoinsieme Γf di R2 definito da:
Γf ={
[x, f(x)] ∈ R2 : x ∈ A}
. (3.2.1)
◃ Esercizio 3.13. Sia f : R → R la funzione definita da:
f(x) = x− 1 , ∀ x ∈ R .
Disegnare il grafico di f .
Soluzione. Per definizione
Γf ={
[x, x− 1] ∈ R2 : x ∈ R
}
. (3.2.2)
La (3.2.2) ci dice che, per i punti del grafico, il legame fra l’ordinata e l’ascissaè espresso dall’equazione:
y = x− 1 , x ∈ R . (3.2.3)
Ne segue che Γf è la retta in Figura 3.9.▹

3.2 Grafici di funzioni nel piano cartesiano 93
x
y
x0
f(x0)
−1
1O
Figura 3.9 – Grafico della funzione dell’Esercizio 3.13.
Osservazione 3.6. Il lettore deve riflettere bene sul legame tra una fun-zione ed il suo grafico. In particolare, osservando ancora la Figura 3.9,si può ragionare nel modo seguente: preso un punto x0 nel dominio dif , si tracci la retta verticale che lo contiene. Questa retta incontrerà ilgrafico Γf necessariamente in un unico punto, la cui ordinata rappresentaprecisamente il valore f(x0).
In realtà, il procedimento descritto nell’Esercizio 3.13 ha validità più ge-nerale: in particolare, consente di affermare che ogni funzione f : R → Rdel tipo:
f(x) = mx+ b , ∀ x ∈ R , (3.2.4)
con m e b numeri reali assegnati, ha come grafico la retta di equazione
y = mx+ b .
Se m ̸= 0, una funzione come in (3.2.4) viene chiamata polinomio di pri-mo grado. Nel Capitolo 4 riprenderemo in modo più sistematico lo studiodei cosiddetti polinomi: per il momento ci limitiamo a introdurre anchei polinomi di secondo grado, in quanto i loro grafici (chiamati parabole,vedi (3.2.6) sotto) rientrano naturalmente all’interno del nostro quadrointroduttivo allo studio della geometria analitica.
Un polinomio di 2o grado è una funzione f : R → R definita da:
f(x) = ax2 + bx+ c , ∀ x ∈ R , (3.2.5)

94 Geometria analitica nel piano
dove a, b, c sono tre numeri reali fissati, con a ̸= 0.
Ragionando come nel precedente Esercizio 3.13, possiamo concludere cheil grafico del polinomio di 2o grado (3.2.5) è il luogo di punti (chiamatoparabola) del piano R2 definito dall’equazione:
y = ax2 + bx+ c , x ∈ R , (a ̸= 0) . (3.2.6)
Descriviamo ora il procedimento operativo che illustra come si rappresen-ta graficamente una parabola del tipo (3.2.6). Per non creare fratture nelflusso dell’esposizione, preferiamo infatti rinviare al Capitolo 4 le giusti-ficazioni di alcune proprietà algebriche delle equazioni di secondo gradodi cui faremo uso già in questa sede. In ogni caso, aggiungiamo che illettore potrebbe trarre beneficio da un riesame di questa parte successivoallo studio del Capitolo 4.
Operativamente, per disegnare una parabola si presentano vari casi chedipendono sia dal segno di a che dal segno del cosiddetto discriminante∆ = b2 − 4ac.
(i) Caso ∆ > 0, a > 0. In questa situazione l’equazione di 2o grado
ax2 + bx+ c = 0 (3.2.7)
ammette due soluzioni in R, date da:
x1 =−b−
√∆
2a, x2 =
−b+√∆
2a. (3.2.8)
Le x1, x2 sono anche chiamate radici del polinomio di 2o grado.
Proprietà 3.1. Notiamo, anticipando un argomento che tratteremo nelCapitolo 4, che se a ̸= 0 e ∆ > 0, sussiste la seguente fattorizzazione delpolinomio di 2o grado:
ax2 + bx+ c = a(x− x1)(x− x2) (3.2.9)
con x1, x2 date dalla (3.2.8) (per il momento, il lettore potrebbe verificarecome esercizio la validità della (3.2.9)).

3.2 Grafici di funzioni nel piano cartesiano 95
In virtù della fattorizzazione (3.2.9), è evidente che, nel Caso (i), lafunzione (3.2.5) è:
⎧
⎨
⎩
positiva se x < x1 oppure x > x2
negativa se x1 < x < x2
nulla se x = x1 oppure x = x2 .
Questa osservazione dovrebbe rendere plausibile per il lettore il fatto che,in questa situazione, la parabola abbia un andamento grafico del tiporiportato in Figura 3.10a: in questa figura, l’ascissa del cosiddetto verticeV è data, per ragioni di simmetria, dal punto medio tra le radici, cioè
x1 + x2
2= − b
2a.
Quindi il vertice V ha coordinate date da:
V =[
− b
2a,− b2
4a+ c]
=[
− b
2a,−∆
4a
]
. (3.2.10)
Si noti anche che il segno delle radici potrebbe essere diverso rispetto aquello scelto nella Figura 3.10a: ad esempio, potrebbero essere entrambenegative, oppure una positiva e l’altra negativa.
(ii) Caso ∆ = 0, a > 0. In questo caso
x1 = x2 = − b
2a
x
y
V=[− b2a ,−
∆4a ]
x2x1
O
(a)
x
y
V=[x1,0]O
(b)
x
y
V
O
(c)
Figura 3.10 – Grafico della parabola nel caso a > 0: (a) ∆ > 0; (b) ∆ = 0; (c)∆ < 0.

96 Geometria analitica nel piano
e vale ancora la fattorizzazione (3.2.9) (con x1 = x2). Quindi la parabola èal di sopra dell’asse x, ad esso tangente nel vertice V di coordinate [x1, 0].Il grafico è riportato in Figura 3.10b.
(iii) Caso ∆ < 0, a > 0. In questo caso la (3.2.7) non ha soluzioni nelcampo dei numeri reali e dunque la parabola (si veda la Figura 3.10c) sitrova interamente al di sopra dell’asse x. Le coordinate di V sono ancoradate da (3.2.10).
Nei tre corrispondenti casi con a < 0 la concavità della parabola è rivoltaverso il basso. I dettagli delle tre rappresentazioni grafiche associate sonolasciati al lettore.
◃ Esercizio 3.14. Tracciare il grafico di f : R → R definita da
f(x) = −x2 − 2x+ 3 , ∀ x ∈ R .
Soluzione. La soluzione è in Figura 3.11. In questo caso a = −1 < 0, quindi
x
y
V4
3
−1
−3 1
O
Figura 3.11 – Grafico della funzione dell’Esercizio 3.14.
la concavità della parabola è rivolta verso il basso. Si noti che il grafico intersecal’asse x nei due punti di ascissa rispettivamente −3 e 1. Inoltre, f(0) = 3 e ilvertice V ha coordinate [−1, 4].
▹
Osservazione 3.7. Nel Capitolo 2 abbiamo introdotto i concetti di fun-zione iniettiva, surgettiva e bigettiva. Possiamo notare che la funzione

3.2 Grafici di funzioni nel piano cartesiano 97
dell’Esercizio 3.13 è sia iniettiva, sia surgettiva, per cui è bigettiva. Piùgeneralmente, lo stesso è vero per ogni polinomio di primo grado.Invece, le funzioni di secondo grado (3.2.5) non sono né iniettive, né sur-gettive. Per rendersi conto di questa affermazione, il lettore è invitato asoffermarsi sul seguente procedimento grafico. Consideriamo il grafico diuna funzione di tipo (3.2.5), come in Figura 3.12 (in essa, a < 0, ma nelcaso a > 0 il ragionamento risulta del tutto analogo). Tracciamo due retteorizzontali
y = ci , i = 1, 2 ,
con c1 > Vy e c2 < Vy (con Vy abbiamo indicato l’ordinata del vertice V ).Si può notare che l’intersezione tra la retta y = c1 e il grafico della funzionenon contiene punti con coordinate reali, quindi, come sottoinsieme di R×R, è l’insieme vuoto ∅. Il lettore dovrebbe riconoscere che ciò è equivalenteall’asserzione che la funzione non è surgettiva. Invece, l’intersezione tra laretta y = c2 e il grafico della funzione è costituita da due punti distinti, diascissa xa e xb rispettivamente: allora abbiamo f(xa) = f(xb) = c2, cosache ci consente di concludere che la funzione non è iniettiva.Per completezza, il lettore dovrebbe anche notare che la bigettività deipolinomi di primo grado corrisponde alla proprietà che tutte le retteorizzontali ne intersecano il grafico in un unico punto.
x
y
y=c1
y=c2
VVy
Vx
xa xb
O
Figura 3.12 – Studio di iniettività e surgettività per funzioni polinomiali di 2o
grado.

98 Geometria analitica nel piano
Introduciamo ora una funzione che risulta di grandissima utilità in svariatesituazioni. Iniziamo dicendo che la scrittura |x| (si legge valore assolutodi x) significa quanto segue:
|x| ={
x se x ∈ R, x ≥ 0−x se x ∈ R, x < 0 .
(3.2.11)
Risulta quindi naturale definire la funzione valore assoluto f : R → Rponendo
f(x) = |x| , ∀ x ∈ R . (3.2.12)
◃ Esercizio 3.15. Disegnare il grafico della funzione valore assolutodefinita in (3.2.11)–(3.2.12).
x
y
f(x)=|x|
(a)
x
y
f(x)=|x+1|
−1
1
(b)
Figura 3.13 – (a) Grafico della funzione f(x) = |x|. (b) Grafico della funzionef(x) = |x+ 1|.
Soluzione. In corrispondenza degli x ≥ 0 il grafico coincide con la bisettricedel primo quadrante, cioè la semiretta
y = x , x ≥ 0 .
Invece, per gli x < 0, il grafico è dato da
y = −x , x < 0 .
Mettendo insieme queste osservazioni si arriva facilmente al grafico di Figu-ra 3.13a.
▹

3.2 Grafici di funzioni nel piano cartesiano 99
◃ Esercizio 3.16. Tracciare il grafico della funzione f : R → R definitada
f(x) = |x+ 1| , ∀ x ∈ R .
Soluzione. Abbiamo
|x+ 1| ={
x+ 1 se x+ 1 ≥ 0−(x+ 1) se x+ 1 < 0 ,
(3.2.13)
che, per maggiore chiarezza, riscriviamo come:
f(x) =
{
x+ 1 se x ≥ −1−x− 1 se x < −1 .
(3.2.14)
Quindi il grafico di f coincide con la retta y = x + 1 se x ≥ −1, mentre perx < −1 si deve usare y = −x− 1. Il risultato complessivo è nella Figura 3.13b.
▹
In molti casi è utile notare la presenza di eventuali simmetrie delle funzioni.
Definizione 3.2. Sia f : R → R. Diremo che f è una funzione pari se:
f(x) = f(−x) , ∀ x ∈ R . (3.2.15)
♦ Esempio 3.1. La funzione valore assoluto che abbiamo definito in(3.2.11)–(3.2.12) è pari.
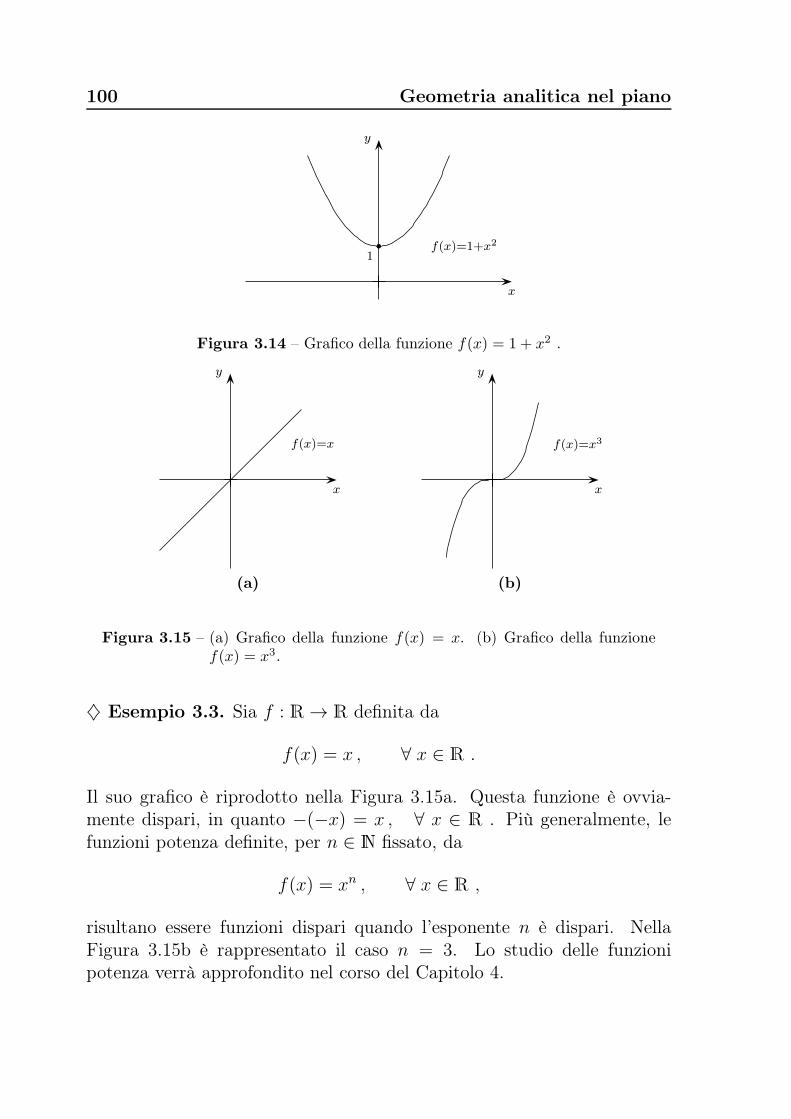
♦ Esempio 3.2. La funzione f : R → R definita da
f(x) = 1 + x2 , ∀ x ∈ R
è pari. Il suo grafico è la parabola in Figura 3.14.
Osservazione 3.8. Se f è una funzione pari, allora il suo grafico risulta sim-metrico rispetto all’asse y (il lettore è invitato a trovare autonomamentela giustificazione di questa asserzione). In altre parole, se si conosce ilgrafico di f per x > 0 (o per x < 0) lo si può completare per riflessionespeculare rispetto all’asse y (cioè, ribaltando la figura attorno all’asse y).
A titolo di esempio, si osservino le Figure 3.13a e 3.14.
Definizione 3.3. Sia f : R → R . Diremo che f è una funzione disparise:
f(x) = −f(−x) , ∀ x ∈ R . (3.2.16)
100 Geometria analitica nel piano
x
y
1f(x)=1+x2
Figura 3.14 – Grafico della funzione f(x) = 1 + x2 .
x
y
f(x)=x
(a)
x
y
f(x)=x3
(b)
Figura 3.15 – (a) Grafico della funzione f(x) = x. (b) Grafico della funzionef(x) = x3.
♦ Esempio 3.3. Sia f : R → R definita da
f(x) = x , ∀ x ∈ R .
Il suo grafico è riprodotto nella Figura 3.15a. Questa funzione è ovvia-mente dispari, in quanto −(−x) = x , ∀ x ∈ R . Più generalmente, lefunzioni potenza definite, per n ∈ N fissato, da
f(x) = xn , ∀ x ∈ R ,
risultano essere funzioni dispari quando l’esponente n è dispari. NellaFigura 3.15b è rappresentato il caso n = 3. Lo studio delle funzionipotenza verrà approfondito nel corso del Capitolo 4.
3.2 Grafici di funzioni nel piano cartesiano 101
Osservazione 3.9. Se f è una funzione dispari, allora il suo grafico risultasimmetrico rispetto all’origine O. In altre parole, se si conosce il grafico dif per x > 0 (o per x < 0) lo si può completare per doppia riflessione spe-culare rispetto all’asse y e all’asse x (cioè, ribaltando due volte l’immaginerispettivamente attorno agli assi y e x).
A titolo di esempio, si possono osservare le Figure 3.15a e 3.15b.
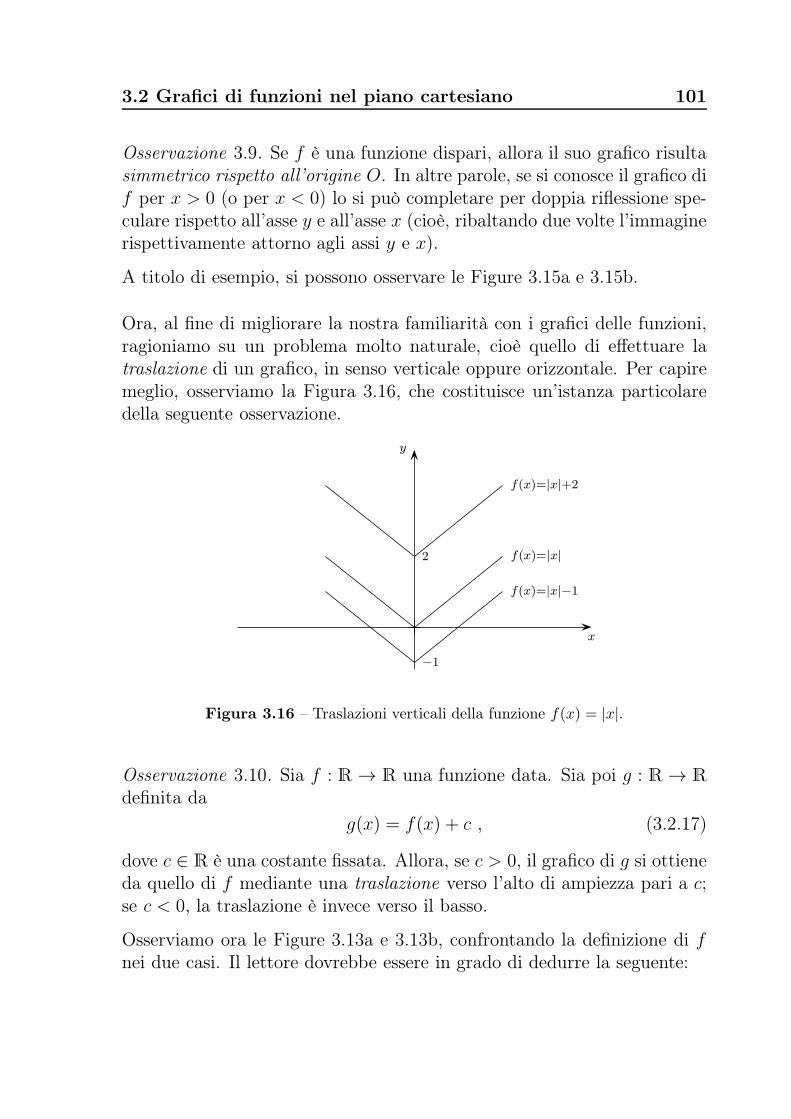
Ora, al fine di migliorare la nostra familiarità con i grafici delle funzioni,ragioniamo su un problema molto naturale, cioè quello di effettuare latraslazione di un grafico, in senso verticale oppure orizzontale. Per capiremeglio, osserviamo la Figura 3.16, che costituisce un’istanza particolaredella seguente osservazione.
x
y
f(x)=|x|−1
f(x)=|x|2
−1
f(x)=|x|+2
Figura 3.16 – Traslazioni verticali della funzione f(x) = |x|.
Osservazione 3.10. Sia f : R → R una funzione data. Sia poi g : R → Rdefinita da
g(x) = f(x) + c , (3.2.17)
dove c ∈ R è una costante fissata. Allora, se c > 0, il grafico di g si ottieneda quello di f mediante una traslazione verso l’alto di ampiezza pari a c;se c < 0, la traslazione è invece verso il basso.
Osserviamo ora le Figure 3.13a e 3.13b, confrontando la definizione di fnei due casi. Il lettore dovrebbe essere in grado di dedurre la seguente:

102 Geometria analitica nel piano
Osservazione 3.11. Sia f : R → R una funzione data. Sia poi g : R → Rdefinita da
g(x) = f(x+ c) , (3.2.18)
dove c ∈ R è una costante fissata. Allora il grafico di g si ottiene da quellodi f mediante una traslazione orizzontale di ampiezza pari a |c|, versosinistra se c > 0, verso destra se c < 0.
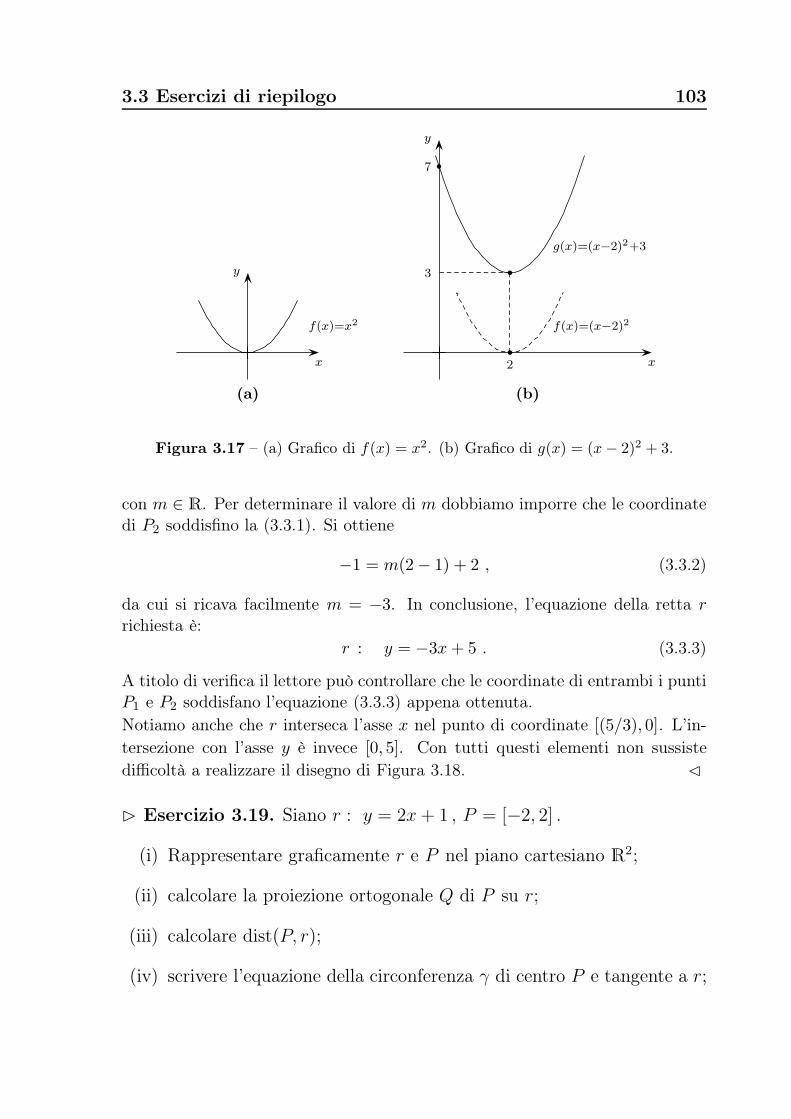
◃ Esercizio 3.17. Sia g : R → R la funzione definita da
g(x) = (x− 2)2 + 3 . (3.2.19)
Disegnare il grafico della funzione g.
Soluzione. Per uno svolgimento rapido e qualitativamente accettabile possia-mo partire dal fatto che il grafico di
f(x) = x2 , x ∈ R ,
è quello di Figura 3.17a. Poi si osserva che il grafico di g si ricava operan-do una traslazione verso destra pari a 2, ed una verso l’alto pari a 3. Datoche g(0)=7, si ottiene il risultato di Figura 3.17b. Alternativamente, avremmopotuto sviluppare la definizione di g ricavando
g(x) = x2 − 4x+ 7 , ∀ x ∈ R .
A questo punto si poteva applicare il metodo di studio delle parabole illustratoin precedenza, cosa che avrebbe condotto ancora alla Figura 3.17b.
▹
3.3 Esercizi di riepilogo
◃ Esercizio 3.18. Siano P1 = [1, 2], P2 = [2,−1]. Scrivere l’equazionedella retta r che contiene P1 e P2, e disegnarla.
Soluzione. Usando la (3.1.30) possiamo dire che tutte le rette passanti per P1
(eccetto quella parallela all’asse y) hanno equazione del tipo
y = m(x− 1) + 2 , (3.3.1)
3.3 Esercizi di riepilogo 103
x
y
f(x)=x2
(a)
x
y
2
3
7
f(x)=(x−2)2
g(x)=(x−2)2+3
(b)
Figura 3.17 – (a) Grafico di f(x) = x2. (b) Grafico di g(x) = (x− 2)2 + 3.
con m ∈ R. Per determinare il valore di m dobbiamo imporre che le coordinatedi P2 soddisfino la (3.3.1). Si ottiene
−1 = m(2− 1) + 2 , (3.3.2)
da cui si ricava facilmente m = −3. In conclusione, l’equazione della retta rrichiesta è:
r : y = −3x+ 5 . (3.3.3)
A titolo di verifica il lettore può controllare che le coordinate di entrambi i puntiP1 e P2 soddisfano l’equazione (3.3.3) appena ottenuta.Notiamo anche che r interseca l’asse x nel punto di coordinate [(5/3), 0]. L’in-tersezione con l’asse y è invece [0, 5]. Con tutti questi elementi non sussistedifficoltà a realizzare il disegno di Figura 3.18. ▹
◃ Esercizio 3.19. Siano r : y = 2x+ 1 , P = [−2, 2] .
(i) Rappresentare graficamente r e P nel piano cartesiano R2;
(ii) calcolare la proiezione ortogonale Q di P su r;
(iii) calcolare dist(P, r);
(iv) scrivere l’equazione della circonferenza γ di centro P e tangente a r;

104 Geometria analitica nel piano
x
y
1
2
2
−1
5
P1
P2
Figura 3.18 – La retta y = −3x+ 5 dell’Esercizio 3.18.
(v) determinare il punto P ′ simmetrico di P rispetto a r.
Soluzione. (i) Per disegnare r è sufficiente determinare due punti che appar-tengono a r. Ad esempio, l’intersezione di r con l’asse x è [−(1/2), 0], mentrequella con l’asse y è [0, 1]. Si perviene quindi alla retta in Figura 3.19.
x
y
2
−2
2
− 12
P
P ′
Q=[0,1]
r
r′
γ
Figura 3.19 – Illustrazione dell’Esercizio 3.19.
(ii) Q = r ∩ r′, dove r′ è la retta passante per P e ortogonale a r. Poiché rha coefficiente angolare m = 2, deduciamo da (3.1.34) che r′ ha coefficienteangolare m′ = (−1/2). Unendo questa informazione al fatto che r′ passa per P ,

3.3 Esercizi di riepilogo 105
ricaviamo facilmente:
r′ : y = −1
2(x+ 2) + 2 ,
che, eseguendo i calcoli, equivale a:
r′ : y = −1
2x+ 1 . (3.3.4)
Ora possiamo concludere che le coordinate di Q vengono determinate imponendoche esse soddisfino sia l’equazione di r, sia quella di r′. Utilizzando ancora lasimbologia introdotta in (3.1.21), ciò equivale a dire che le coordinate di Q siricavano risolvendo il seguente sistema:
⎧
⎨
⎩
y = 2x+ 1
y = −12 x+ 1 .
(3.3.5)
Ora il lettore è invitato a determinare autonomamente, mediante considerazio-ni algebriche elementari, la soluzione del sistema (3.3.5): il risultato è Q = [0, 1].
(iii) dist(P, r) = dist(P,Q) =√
(−2− 0)2 + (2− 1)2 =√5 .
(iv) Grazie alla (3.1.6), con centro C = P e raggio R = dist(P, r) =√5,
perveniamo all’equazione della circonferenza γ richiesta:
γ : (x+ 2)2 + (y − 2)2 = 5 . (3.3.6)
(v) Il simmetrico P ′ = [x′, y′] di P rispetto ad r si può ottenere imponendo cheQ sia il punto medio del segmento PP ′. In formule
[
x′ + (−2)
2,y′ + 2
2
]
= [0, 1] ovvero [x′, y′] = [2, 0] .
Si noti che il fatto che Q e P ′ coincidano con le intersezioni di r′ con gli assi èpuramente casuale.
▹
◃ Esercizio 3.20. Determinare per quali valori di b ∈ R, la retta r diequazione y = b risulta secante, tangente o esterna alla circonferenza γ diequazione x2 + y2 − 2x = 0.

106 Geometria analitica nel piano
Soluzione. Determiniamo dapprima il centro ed il raggio della circonferenza.Dalle (3.1.9) si ricava
C = [1, 0] , R = 1 .
Adesso, la retta r risulta tangente alla circonferenza quando dist(C, r) = R = 1,ovvero, quando
|b| = 1 .
Segue che la retta r è secante alla circonferenza quando −1 < b < 1, tangentequando b = ±1 ed esterna quando b < −1 o b > 1. La visualizzazione graficadella soluzione è mostrata in Figura 3.20. ▹
x
y
b=1.5
b=1
b=−1
b=−1.5
γ
C=[1,0]
Figura 3.20 – Illustrazione dell’Esercizio 3.20.
◃ Esercizio 3.21. Disegnare il grafico di f : R → R definita da
f(x) = |x− 1|− |x| , ∀ x ∈ R . (3.3.7)
Soluzione. Osserviamo preliminarmente che
|x| ={
x se x ≥ 0−x se x < 0
e |x− 1| ={
x− 1 se x ≥ 1−x+ 1 se x < 1 .
(3.3.8)
Ora, mediante una breve riflessione, deduciamo che:
f(x) =
⎧
⎨
⎩
(−x+ 1)− (−x) se x < 0(−x+ 1)− x se 0 ≤ x < 1(x− 1)− x se x ≥ 1 .
(3.3.9)
Svolgendo i calcoli in (3.3.9) otteniamo:
f(x) =
⎧
⎨
⎩
1 se x < 0−2x+ 1 se 0 ≤ x < 1−1 se x ≥ 1 .
(3.3.10)

3.3 Esercizi di riepilogo 107
x
y
1
−1
1
(a)
x
y
2
−1
(b)
Figura 3.21 – (a) Grafico della funzione f(x) = |x − 1| − |x|. (b) Grafico dig(x) = f(x+ 1) + 1, con f(x) definita dalla (3.3.7).
Quindi il grafico della funzione è quello di Figura 3.21a.▹
◃ Esercizio 3.22. Sia f : R → R la funzione dell’Esercizio 3.21. Dise-gnare il grafico di g : R → R definita da
g(x) = f(x+ 1) + 1 , ∀ x ∈ R .
Soluzione. Si può partire dal grafico di Figura 3.21a, fare una traslazione versol’alto di ampiezza 1 e poi una traslazione a sinistra, ancora di ampiezza 1. Siottiene il grafico di Figura 3.21b.Alternativamente, si può esplicitare
g(x) = |(x+ 1)− 1|− |x+ 1|+ 1 = |x|− |x+ 1|+ 1
e poi studiare direttamente g.▹
◃ Esercizio 3.23 (*). Sia P = [2, 4]. Si consideri la parabola di equazione
y = x2 + x− 2 . (3.3.11)
(i) Disegnare la parabola, verificando che essa contiene P ;
(ii) determinare l’equazione della retta r che è tangente alla parabola inP .
108 Geometria analitica nel piano
Soluzione. (i) L’equazione
x2 + x− 2 = 0
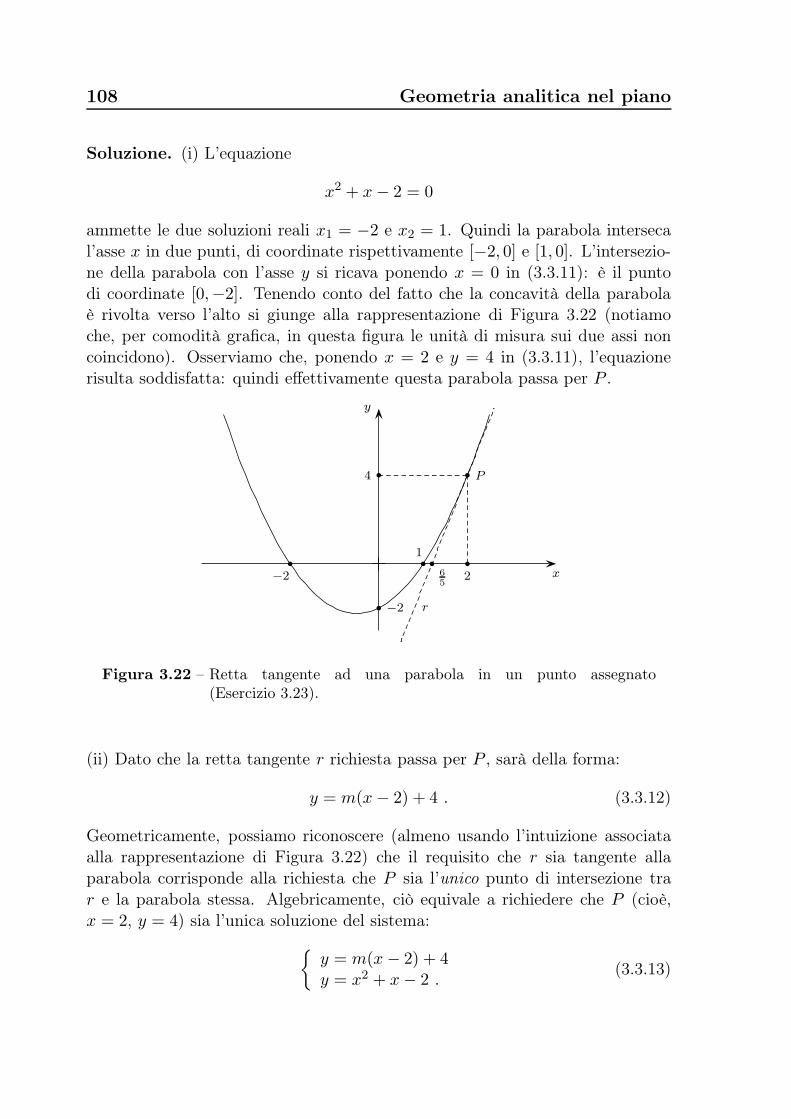
ammette le due soluzioni reali x1 = −2 e x2 = 1. Quindi la parabola intersecal’asse x in due punti, di coordinate rispettivamente [−2, 0] e [1, 0]. L’intersezio-ne della parabola con l’asse y si ricava ponendo x = 0 in (3.3.11): è il puntodi coordinate [0,−2]. Tenendo conto del fatto che la concavità della parabolaè rivolta verso l’alto si giunge alla rappresentazione di Figura 3.22 (notiamoche, per comodità grafica, in questa figura le unità di misura sui due assi noncoincidono). Osserviamo che, ponendo x = 2 e y = 4 in (3.3.11), l’equazionerisulta soddisfatta: quindi effettivamente questa parabola passa per P .
x
y
4
−2
−2
1
65
2
P
r
Figura 3.22 – Retta tangente ad una parabola in un punto assegnato(Esercizio 3.23).
(ii) Dato che la retta tangente r richiesta passa per P , sarà della forma:
y = m(x− 2) + 4 . (3.3.12)
Geometricamente, possiamo riconoscere (almeno usando l’intuizione associataalla rappresentazione di Figura 3.22) che il requisito che r sia tangente allaparabola corrisponde alla richiesta che P sia l’unico punto di intersezione trar e la parabola stessa. Algebricamente, ciò equivale a richiedere che P (cioè,x = 2, y = 4) sia l’unica soluzione del sistema:
{
y = m(x− 2) + 4y = x2 + x− 2 .
(3.3.13)

3.3 Esercizi di riepilogo 109
Studiamo questo sistema: uguagliando le due espressioni che esso impone pery, ricaviamo:
x2 + x− 2 = m(x− 2) + 4 ,
che, sviluppando i calcoli, equivale a:
x2 + (1−m)x+ (2m− 6) = 0 . (3.3.14)
Questa è un’equazione di tipo (3.2.7), con a = 1, b = (1 −m) e c = (2m − 6).Quindi la condizione che (3.3.14) ammetta un’unica soluzione equivale al fattoche il suo discriminante
∆ = b2 − 4ac
si annulli. Esplicitando questa richiesta otteniamo
(1−m)2 − 4(2m− 6) = 0 ,
che eseguendo i calcoli diventa:
m2 − 10m+ 25 = 0 ovvero (m− 5)2 = 0 . (3.3.15)
Quindi m = 5 e l’equazione della retta tangente r richiesta è
r : y = 5(x− 2) + 4 ovvero y = 5x− 6 . (3.3.16)
▹
◃ Esercizio 3.24. Si consideri il seguente sottoinsieme di R2:
A ={
[x, y] ∈ R2 : y ≥ x+ 1}
. (3.3.17)
Rappresentare graficamente A.
Soluzione. Sappiamo bene che l’equazione
y = x+ 1
rappresenta una retta r in R2. Ad A appartengono non solo i punti di questaretta, ma anche tutti quei punti che stanno verticalmente sopra un punto dir. In parole più semplici, A altro non è che il semi-piano avente r come bordoinferiore (si veda la Figura 3.23).
▹

110 Geometria analitica nel piano
x
y
y=x+1
Figura 3.23 – Illustrazione dell’Esercizio 3.24.
◃ Esercizio 3.25. Si consideri il seguente sottoinsieme di R2:
A ={
[x, y] ∈ R2 : 1 ≤ x ≤ 3 e − 2x ≤ y ≤ x+ 1}
. (3.3.18)
Rappresentare graficamente A.
Soluzione. I punti di A hanno ascissa compresa tra 1 e 3 e sono compresi trala retta r1, di equazione y = −2x, e la retta r2, di equazione y = x + 1. Larappresentazione grafica di A è in Figura 3.24.
▹
x
y
31
y=x+1
y=−2x
Figura 3.24 – Illustrazione dell’Esercizio 3.25.

3.3 Esercizi di riepilogo 111
In un modo simile a quello dell’esercizio precedente, possiamo descrivereuna regione del piano compresa tra i grafici di due funzioni. Più preci-samente, siano f(x) e g(x) due funzioni definite su un comune intervalloa ≤ x ≤ b e tali che:
f(x) ≤ g(x) , ∀ x t. c. a ≤ x ≤ b .
Allora la regione del piano compresa tra i grafici di f(x) e g(x) è l’insiemeseguente:
A ={
[x, y] ∈ R2 : a ≤ x ≤ b e f(x) ≤ y ≤ g(x)}
. (3.3.19)
A titolo di esempio, si veda la Figura 3.25.
x
y
a b
y=g(x)
y=f(x)
Figura 3.25 – Rappresentazione geometrica della regione A definita dalla(3.3.19).
◃ Esercizio 3.26. Determinare per quali x ∈ R è soddisfatta la seguentedisequazione:
x2 − x− 6 < 0 . (3.3.20)
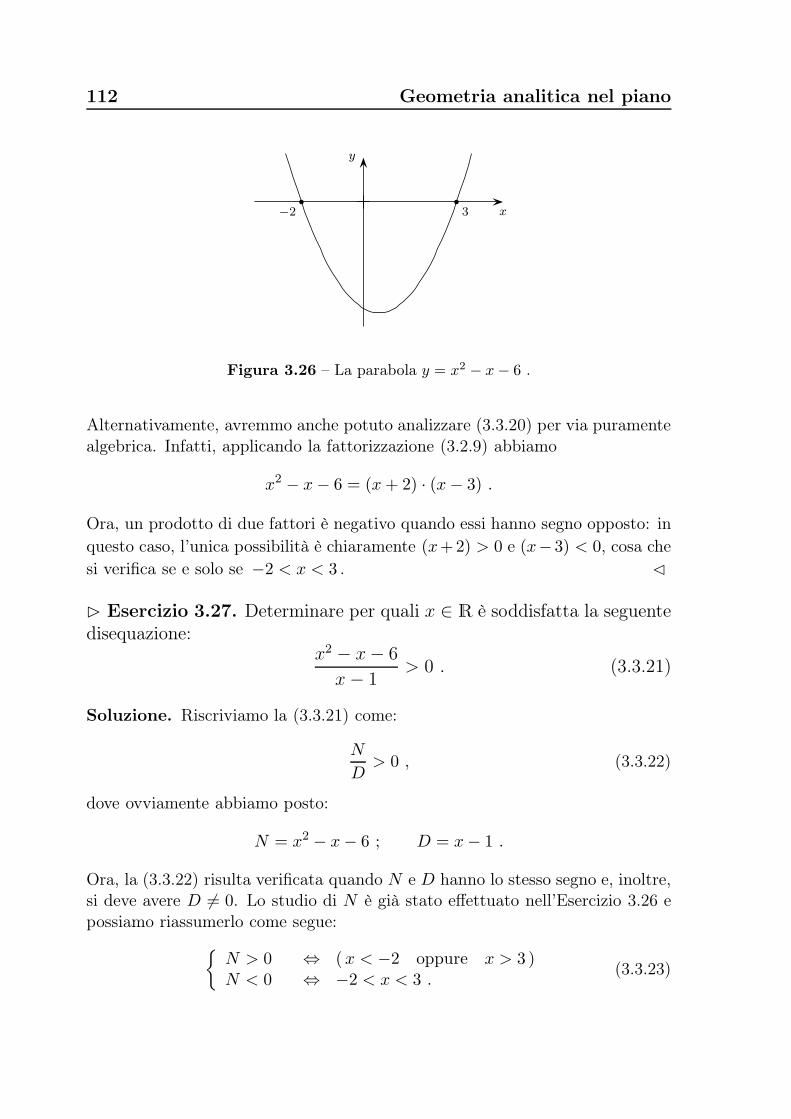
Soluzione. L’equazione x2−x−6 = 0 ha come soluzioni i due valori x1 = −2,x2 = 3. Quindi la parabola y = x2−x−6 , che ha concavità verso l’alto, intersecal’asse x nei due punti di ascissa rispettivamente −2 e 3, come possiamo vederenella Figura 3.26. Ne segue che la quantità x2 − x − 6 assume valori negativiprecisamente quando −2 < x < 3. In conclusione l’insieme delle soluzioni di(3.3.20) è:
A = {x ∈ R : −2 < x < 3} .
112 Geometria analitica nel piano
x
y
−2 3
Figura 3.26 – La parabola y = x2 − x− 6 .
Alternativamente, avremmo anche potuto analizzare (3.3.20) per via puramentealgebrica. Infatti, applicando la fattorizzazione (3.2.9) abbiamo
x2 − x− 6 = (x+ 2) · (x− 3) .
Ora, un prodotto di due fattori è negativo quando essi hanno segno opposto: inquesto caso, l’unica possibilità è chiaramente (x+2) > 0 e (x−3) < 0, cosa chesi verifica se e solo se −2 < x < 3 . ▹
◃ Esercizio 3.27. Determinare per quali x ∈ R è soddisfatta la seguentedisequazione:
x2 − x− 6
x− 1> 0 . (3.3.21)
Soluzione. Riscriviamo la (3.3.21) come:
N
D> 0 , (3.3.22)
dove ovviamente abbiamo posto:
N = x2 − x− 6 ; D = x− 1 .
Ora, la (3.3.22) risulta verificata quando N e D hanno lo stesso segno e, inoltre,si deve avere D ̸= 0. Lo studio di N è già stato effettuato nell’Esercizio 3.26 epossiamo riassumerlo come segue:
{
N > 0 ⇔ (x < −2 oppure x > 3 )N < 0 ⇔ −2 < x < 3 .
(3.3.23)

3.3 Esercizi di riepilogo 113
Invece per D:{
D > 0 ⇔ x > 1D < 0 ⇔ x < 1 .
(3.3.24)
Adesso trasferiamo le informazioni (3.3.23) e (3.3.24) nella Figura 3.27: le ascissedove N è linea unita sono quelle per cui N > 0, quelle per cui N è lineatratteggiata corrispondono invece a N < 0; lo stesso vale per D.
x
D
N
ND
− + + − +
31−2
Figura 3.27 – Rappresentazione del segno di N , D e N/D.
Dall’esame della rappresentazione di Figura 3.27 vediamo che N e D sono en-trambi positivi per x > 3, mentre sono entrambi negativi per −2 < x < 1. Inconclusione, l’insieme delle soluzioni di (3.3.21) è:
{x ∈ R : −2 < x < 1} ∪ {x ∈ R : x > 3} .
▹
◃ Esercizio 3.28. Determinare per quali x ∈ R è soddisfatta la seguentedisequazione:
|x+ 2| ≤ 3 . (3.3.25)
Soluzione. Sappiamo che
|x+ 2| ={
x+ 2 se x ≥ −2−x− 2 se x < −2 .
(3.3.26)
Quindi la (3.3.25) equivale all’unione delle soluzioni dei due seguenti sistemi:{
x+ 2 ≤ 3
x ≥ −2∪
{
−x− 2 ≤ 3
x < −2
ovvero:

114 Geometria analitica nel piano
{
x ≤ 1
x ≥ −2∪
{
x ≥ −5
x < −2 .
Il primo sistema risulta soddisfato in A = {x ∈ R ; −2 ≤ x ≤ 1}, mentre ilsecondo in B = {x ∈ R : −5 ≤ x < −2}. L’insieme delle soluzioni delladisequazione iniziale è quindi:
A ∪B = {x ∈ R : −5 ≤ x ≤ 1} .
▹
Osservazione 3.12. Ragionando come nell’Esercizio 3.28, il lettore è invi-tato a verificare la seguente equivalenza:
|x− ℓ| ≤ ε ⇔ ℓ− ε ≤ x ≤ ℓ+ ϵ , (3.3.27)
valida ∀ ℓ, ε ∈ R (si noti che la (3.3.27) ammette soluzioni solo se ε ≥ 0).
3.4 Coniche in forma canonica (*)
In generale, per conica in R2 si intende il luogo dei punti di R2 chesoddisfano un’equazione polinomiale di secondo grado del tipo
ax2 + bxy + cy2 + dx+ ey + f = 0 , (3.4.1)
dove a, b, c, d, e, f ∈ R e i coefficienti a, b, e c non sono tutti nulli. In realtà,senza qualche ulteriore ipotesi sui coefficienti, la (3.4.1) comprende anchei cosiddetti casi degeneri. Ad esempio, il luogo dei punti che soddisfano
xy = 0 (3.4.2)
non è altro che l’unione dei due assi. Più generalmente, le coniche dege-neri sono costituite da una coppia di rette, che possono essere incidenti,coincidenti oppure parallele e distinte.Invece i casi geometricamente significativi, cioè le coniche non degeneri,sono essenzialmente tre: ellisse, iperbole e parabola. Più specificamente,uno studio avanzato delle equazioni di tipo (3.4.1), coinvolgente argomentinon solo puramente geometrici, ma anche inerenti alla cosiddetta algebra

3.4 Coniche in forma canonica (*) 115
lineare, consente essenzialmente di ricondurre (mediante opportune rota-zioni e traslazioni del sistema di assi cartesiani di partenza) lo studio delleconiche alle situazioni che descriveremo in questo paragrafo e che, per que-sta ragione, vengono appunto dette forme canoniche di ellissi, iperboli eparabole.
Ellisse in forma canonica
L’equazione di tipo (3.4.1) che la definisce viene tradizionalmente scrittanel modo seguente:
γ :x2
a2+
y2
b2= 1 , a, b > 0 . (3.4.3)
L’ellisse γ è rappresentata, nel caso a > b, in Figura 3.28. Il punto F1
x
y
b
−b
a−a
F1F2
P
γ
Figura 3.28 – L’ellisse in forma canonica.
ha coordinate F1 = [√a2 − b2, 0], e F2 = −F1. I punti F1 e F2 vengono
chiamati fuochi dell’ellisse γ. Il loro interesse risiede nel fatto che è possi-bile verificare che l’ellisse γ, definita dalla (3.4.3), coincide con il seguenteluogo di punti:
γ ={
P ∈ R2 : dist(P, F1) + dist(P, F2) = 2a}
. (3.4.4)

116 Geometria analitica nel piano
La verifica che la (3.4.3) e la (3.4.4) rappresentano la stessa figura geo-metrica consiste nel controllare che, indicando con P = [x, y] il genericopunto di R2, allora la condizione
dist(P, F1) + dist(P, F2) = 2a (3.4.5)
equivale all’equazione (3.4.3). Per non spezzare il flusso dell’esposizionerimandiamo all’Esercizio 3.29 la dimostrazione dell’equivalenza tra (3.4.3)e (3.4.5).
Iperbole in forma canonica
Questa conica è definita dalla seguente equazione:
γ :x2
a2− y2
b2= 1 , a, b > 0 . (3.4.6)
L’iperbole γ è rappresentata nella Figura 3.29. I due fuochi dell’iperbo-
x
y
y= baxy=− b
ax
a−a F1F2
P
Figura 3.29 – L’iperbole in forma canonica.
le hanno coordinate F1 = [√a2 + b2, 0] , F2 = −F1. Si può notare che
l’iperbole γ è formata da due componenti disgiunte (dette rami), unanel semipiano x ≥ a , l’altra, speculare rispetto all’asse y, nella regionex ≤ −a .

3.4 Coniche in forma canonica (*) 117
Si può anche intuire, attraverso l’osservazione della Figura 3.29, che i ramidi γ si avvicinano alle due rette y = ± (b/a) x quando x diventa infinita-mente grande: precisare in modo matematicamente soddisfacente questoconcetto di avvicinamento richiederebbe l’uso della nozione di limite, cosache va al di là dei nostri obiettivi.In modo analogo a quanto visto per l’ellisse, possiamo dare una carat-terizzazione geometrica dell’iperbole γ in termini di distanze dai suoifuochi:
γ ={
P ∈ R2 : |dist(P, F1)− dist(P, F2)| = 2a}
. (3.4.7)
L’equivalenza tra (3.4.6) e (3.4.7) è una verifica molto simile a quelladell’Esercizio 3.29 e perciò è lasciata al lettore.
Parabola in forma canonica
Nel §3.2 abbiamo imparato a tracciare il grafico di una parabola. Ora inve-ce presentiamo una caratterizzazione geometrica della parabola in analogiacon (3.4.4) e (3.4.7).L’equazione della parabola in forma canonica può essere scritta comesegue:
γ : 2p y = x2 , p > 0 . (3.4.8)
Facciamo riferimento alla Figura 3.30. Abbiamo un fuoco F = [0, (p/2)]
x
y
F
P
r
Figura 3.30 – La parabola in forma canonica.
e una retta r di equazione y = −(p/2), che chiameremo direttrice dellaparabola. Ora affermiamo che per la parabola γ si ha:
γ ={
P ∈ R2 : dist(P, F ) = dist(P, r)}
. (3.4.9)
118 Geometria analitica nel piano
Vediamo in dettaglio come si mostra l’equivalenza tra le due caratteriz-zazioni (3.4.8), (3.4.9), in quanto questo semplice esercizio può guidarenella comprensione dell’Esercizio 3.29. Per il generico P ∈ R2, scriviamoP = [x, y]. Dalle (3.1.1) e (3.1.36) si trova
dist(P, r) =∣
∣
∣y +
p
2
∣
∣
∣, dist(P, F ) =
√
x2 + (y − p
2)2 .
Quindi l’equazione in (3.4.9) (dist(P, F ) = dist(P, r)) diventa
∣
∣
∣y +
p
2
∣
∣
∣=
√
x2 + (y − p
2)2 . (3.4.10)
Elevando entrambi i membri al quadrato si ha
y2 + yp+(p
2
)2= x2 + y2 − yp+
(p
2
)2,
da cui è facile ricavare la (3.4.8).
◃ Esercizio 3.29 (*). Verificare l’equivalenza di (3.4.3) e (3.4.5).
Soluzione. Posto P = [x, y] e usando l’espressione esplicita di F1 e F2 abbiamo:
dist(P,F1) =
√
(x−√
a2 − b2)2 + y2 (3.4.11)
dist(P,F2) =
√
(x+√
a2 − b2)2 + y2 . (3.4.12)
Usando le (3.4.11)–(3.4.12), la (3.4.5) diventa√
(x−√
a2 − b2)2 + y2 +
√
(x+√
a2 − b2)2 + y2 = 2a . (3.4.13)
Ora, elevando al quadrato e isolando a destra il radicale rimasto, si ha:
(x−√
a2 − b2)2 + y2 + (x+√
a2 − b2)2 + y2 − 4a2 (3.4.14)
= 2
√
(x−√
a2 − b2)2 + y2√
(x+√
a2 − b2)2 + y2 .
Conviene adesso svolgere i calcoli in (3.4.14) per ottenere che essa equivale a
2x2 + 2y2 − 2a2 − 2b2 = 2
√
(x−√
a2 − b2)2 + y2√
(x+√
a2 − b2)2 + y2 .
3.5 Esercizi proposti 119
Ora, dividendo entrambi i membri per 2 ed elevando poi al quadrato si ha:
(x2 + y2 − a2 − b2)2 = [(x−√
a2 − b2)2 + y2] [(x+√
a2 − b2)2 + y2] . (3.4.15)
Sviluppando ulteriormente i calcoli si ottiene
x4 + y4 + a4 + b4 + 2x2y2 − 2a2x2 − 2b2x2 − 2a2y2 − 2b2y2 + 2a2b2 (3.4.16)
= [x2 + a2 − b2 + y2 − 2x√
a2 − b2] [x2 + a2 − b2 + y2 + 2x√
a2 − b2] .
Adesso si può notare che il membro a destra della (3.4.16) ha la forma
(A−B)(A+B) ,
conA = x2 + a2 − b2 + y2 e B = 2x
√
a2 − b2 .
Quindi, sostituendolo con A2 −B2 e effettuando le risultanti semplificazioni, la(3.4.16) diventa
4x2b2 + 4y2a2 = 4a2b2 . (3.4.17)
Dividendo per 4a2b2 si ottiene infine la (3.4.3).▹
Abbiamo ritenuto opportuno proporre un esercizio come il precedente per-ché siamo convinti che, oltre alle capacità di ragionamento logico, il lettoredovrebbe, in parallelo, sviluppare l’abilità di eseguire e portare a terminecalcoli anche lunghi. A tal fine, si suggerisce di svolgere sempre i passaggicon ordine, senza perdere di vista né il calcolo che si compie al momento,né l’obiettivo finale che si vuole ottenere.
3.5 Esercizi proposti
◃ Esercizio 3.30. Scrivere l’equazione della retta r che passa per il puntoP = [1,−2] ed è perpendicolare alla retta passante per l’origine e Q =[1, 2].
◃ Esercizio 3.31. Sia C = [2,−1]. Scrivere l’equazione della circonferen-za γ che ha centro in C ed è tangente alla bisettrice del secondo e quartoquadrante.

120 Geometria analitica nel piano
◃ Esercizio 3.32. Siano γ la circonferenza di equazione x2+(y−2)2 = 1e P = [0,−1] . Determinare l’equazione delle due rette r1 e r2 che passanoper P e sono tangenti alla circonferenza γ.
◃ Esercizio 3.33. Si considerino le due rette parallele r1 e r2 di equazionerispettivamente y = x + 1 e y = x − 1. Determinare l’equazione dellagenerica circonferenza tangente ad entrambe le rette.
◃ Esercizio 3.34. Determinare per quali valori di b ∈ R la retta r diequazione y = x + b risulta tangente alla circonferenza γ di equazionex2 + y2 = 1.
◃ Esercizio 3.35. Determinare per quali valori di m ∈ R la retta r diequazione y = mx + 2 risulta tangente alla circonferenza γ di equazionex2 + y2 = 1.
◃ Esercizio 3.36. Determinare per quali valori di x ∈ R risulta verificatale seguente disequazione:
|x+ 5| ≤ 2x− 2 .
◃ Esercizio 3.37. Determinare per quali valori di x ∈ R risulta verificatale seguente disequazione:
|x|+ x+ 5 ≤ |2x− 1| .
◃ Esercizio 3.38. Determinare per quali valori di x ∈ R risulta verificatale seguente disequazione:
1
x+
1
x+ 1≥ 2 .
3.6 Commenti e note bibliografiche
Come già accennato nell’introduzione, Cartesio introdusse le basi dellageometria analitica nel 1637, in un saggio intitolato Geometria che fuincluso nel suo celeberrimo Discorso sul metodo. Questo lavoro fu fon-damentale per varie ragioni. Innanzitutto, fornì uno strumento essenzia-le che consentì poi a Newton e Leibnitz di procedere allo sviluppo delle
3.6 Commenti e note bibliografiche 121
basi del cosiddetto calcolo differenziale che, senza dubbio, costituisce lefondamenta di tutto il sapere scientifico moderno (si veda [17]).Poi, in un’ottica leggermente diversa, va sottolineato che l’uso delle coor-dinate cartesiane fu all’origine della nascita delle cosiddette geometrie noneuclidee (geometria proiettiva, descrittiva etc: si vedano, ad esempio, [10]e [15]).
Per concludere questo capitolo riteniamo importante evidenziare che, peruno studio più avanzato e profondo della geometria analitica, è indispen-sabile avvalersi degli strumenti offerti dalla teoria dei vettori e, più ge-neralmente, dall’algebra lineare. Il lettore beneficierà di questi modernistrumenti quando affronterà questi argomenti all’interno di corsi offertidalle Facoltà scientifiche universitarie. In questa sede, ci limitiamo invecea citare alcuni testi per possibili approfondimenti in queste direzioni: [4],[5], [23] e [24].