
Lezione 12 Esercitazioni di Algebra e Geometria A.A....
13
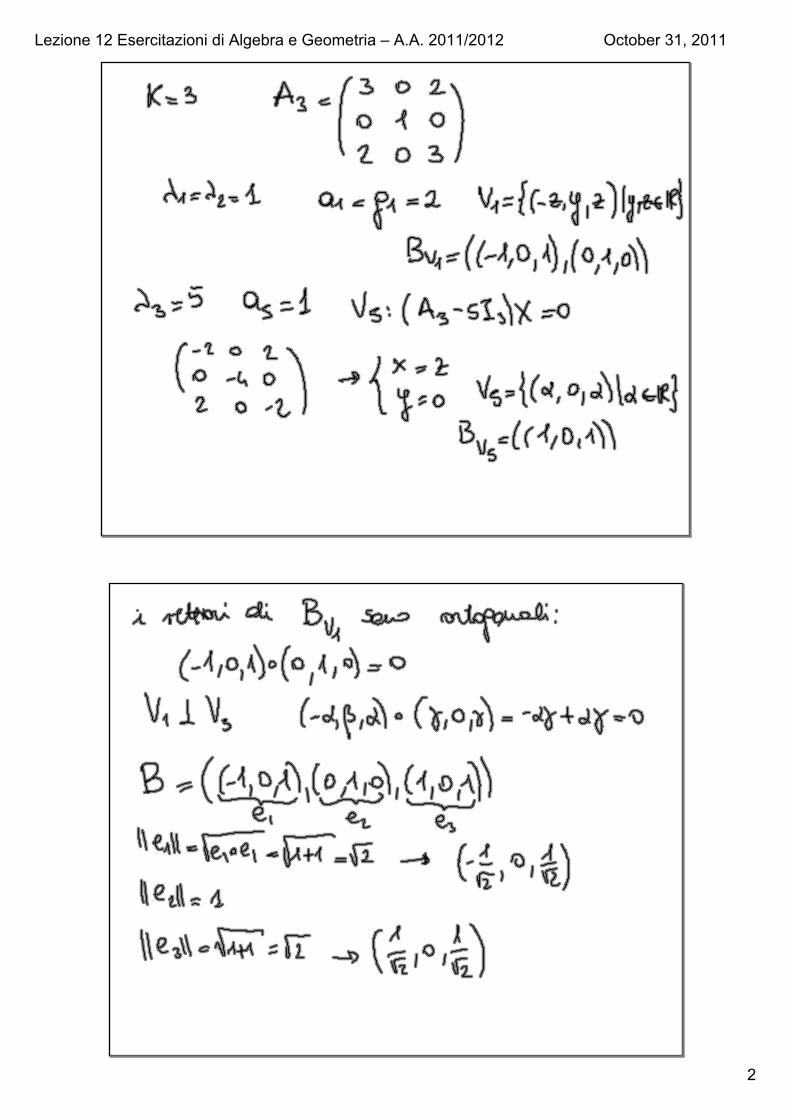
Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012 1 October 31, 2011 (Esercizio 5.7.20. del libro "Algebra Lineare 1") Esercizio 1 Sia data la matrice Si dica per quali valori di k A è diagonalizzabile. Posto k=3 si stabilisca se è possibile determinare una base ortonormale di autovettori di A rispetto al prodotto euclideo. k k 3 A=
-
Upload
duongkhanh -
Category
Documents
-
view
219 -
download
0
Transcript of Lezione 12 Esercitazioni di Algebra e Geometria A.A....

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
1
October 31, 2011
(Esercizio 5.7.20. del libro "Algebra Lineare 1")Esercizio 1Sia data la matrice
Si dica per quali valori di k A è diagonalizzabile. Posto k=3 si stabilisca se è possibile determinare una base ortonormale di autovettori di A rispetto al prodotto euclideo.
k
k
3
A =
Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
2
October 31, 2011

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
3
October 31, 2011
(Esercizio 5.7.21. del libro "Algebra Lineare 1")Esercizio 2Sia data la matrice
Si determini una base ortonormale di R (R) e una matrice P ortogonale che diagonalizza la matrice A.
3
A =

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
4
October 31, 2011

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
5
October 31, 2011

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
6
October 31, 2011
ESERCIZIO 1. Si considerino, al variare del parametro reale k, le matrici
Si determini al variare di il rango della matrice A; il rango della matrice AjB; i valori di k per cui il sistema AX = B è compatibile e, per tali valori, il numero delle soluzioni; posto k = 1 l'insieme S delle soluzioni di AX = B;

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
7
October 31, 2011

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
8
October 31, 2011
ESERCIZIO 2. In con il prodotto scalare euclideo si considerino il vettore v = (k2; 3; k2; k1) e la sequenza A =((1; 1; k3; 1); (1; 1; 0; 0); (k3; 1; 0; k2)), dove k è un parametro reale. Si determinino al variare di k una base e la dimensione di L(A); i valori di k per cui il vettore v appartiene a L(A). posto k = 2 il complemento ortogonale di A.

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
9
October 31, 2011

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
10
October 31, 2011
ESERCIZIO 3. Nello spazio vettoriale si considerino i sottospazi
dove k è un parametro reale. Si determinino una base e la dimensione di U; si determini al variare di k la dimensione di W; si determinino i valori di k per cui la somma U +W è diretta.

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
11
October 31, 2011

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
12
October 31, 2011
ESERCIZIO 4. Si consideri la matrice
dove k è un parametro reale. Si determinino, al variare di k gli autovalori di e le rispettive molteplicità algebriche e geometriche; i valori di k per cui è diagonalizzabile; posto k = 2 una matrice D diagonale simile ad e la matrice diagonalizzante P.

Lezione 12 Esercitazioni di Algebra e Geometria – A.A. 2011/2012
13
October 31, 2011


















