CONTROLLI AUTOMATICI - unipa.it Studio in t_03_2016.pdf · 1 CONTROLLI AUTOMATICI A.A. 2015/2016...
46
1 CONTROLLI AUTOMATICI A.A. 2015/2016 Introduzione al Corso Due problemi di notevole interesse ingegneristico sono quelli dell’ analisi di un generico sistema reale, naturale o artificiale, per acquisire informazioni sul suo comportamento, e della sintesi di un adatto dispositivo, denominato controllore, da connettere a tale sistema in grado di forzare l’intero sistema a comportarsi nel modo desiderato. Un sistema reale può essere definito come quell' ente che evolve nel tempo a seguito di azioni esercitate su di esso dall'esterno. In generale, esso è costituito da un insieme di componenti che interagiscono fra loro al fine di conseguire obiettivi prefissati. Alcuni esempi di sistemi reali sono i seguenti. Un insieme massa-molla-smorzatore che costituisce, ad esempio, un modello fisico di una sospensione passiva di un autoveicolo; se si inserisce anche un dispositivo in grado di generare forze meccaniche, denominato attuatore, si ottiene una sospensione attiva. Un motore che è un sistema il cui scopo è quello di imporre un movimento a un dato carico in accordo a una legge ben precisa che impone un certo andamento temporale, ad esempio, per la posizione lineare o angolare o per la velocità o per la coppia motrice. Un manipolatore robotico è un sistema i cui scopi sono quelli di manipolare oggetti o di forzare la parte terminale, l’end effector, a seguire particolari traiettorie, ad esempio, per operazioni di verniciatura di parti di autoveicoli, per operazioni nello spazio o in ambienti che l’uomo non può frequentare, come il nocciolo di un reattore nucleare. Un aeromobile. Una navicella spaziale. Una nave. Un veicolo autonomo marino o aereo. Uno scaldabagno il cui obiettivo è quello di portare la temperatura dell’acqua a un prefissato valore. Una centrale elettrica il cui obiettivo è quello di produrre energia elettrica con valori della tensione e della frequenza ben definiti. Una raffineria di petrolio. Una batteria lanciarazzi sistemata sopra un veicolo mobile, che può essere assimilata a un pendolo inverso. Analisi L'analisi ingegneristica di un sistema reale ha come obiettivo quello di migliorare e, se possibile, ottimizzare il comportamento del sistema stesso dal punto di vista dell'affidabilità e dell’efficienza. Per effettuare l’analisi di un sistema occorre, anzitutto, individuare le grandezze mediante le quali è possibile stimolare l’evoluzione del sistema, denominate grandezze di ingresso, e le grandezze il cui andamento temporale è di particolare interesse per giudicare le prestazioni del sistema, denominate grandezze di uscita.
Transcript of CONTROLLI AUTOMATICI - unipa.it Studio in t_03_2016.pdf · 1 CONTROLLI AUTOMATICI A.A. 2015/2016...

1
CONTROLLI AUTOMATICIA.A. 2015/2016
Introduzione al Corso
Due problemi di notevole interesse ingegneristico sono quelli dell’analisi di un genericosistema reale, naturale o artificiale, per acquisire informazioni sul suo comportamento, e dellasintesi di un adatto dispositivo, denominato controllore, da connettere a tale sistema in gradodi forzare l’intero sistema a comportarsi nel modo desiderato.
Un sistema reale può essere definito come quell' ente che evolve nel tempo a seguito diazioni esercitate su di esso dall'esterno. In generale, esso è costituito da un insieme dicomponenti che interagiscono fra loro al fine di conseguire obiettivi prefissati.
Alcuni esempi di sistemi reali sono i seguenti.
Un insieme massa-molla-smorzatore che costituisce, ad esempio, un modello fisico diuna sospensione passiva di un autoveicolo; se si inserisce anche un dispositivo ingrado di generare forze meccaniche, denominato attuatore, si ottiene una sospensioneattiva.
Un motore che è un sistema il cui scopo è quello di imporre un movimento a un datocarico in accordo a una legge ben precisa che impone un certo andamento temporale,ad esempio, per la posizione lineare o angolare o per la velocità o per la coppiamotrice.
Un manipolatore robotico è un sistema i cui scopi sono quelli di manipolare oggetti odi forzare la parte terminale, l’end effector, a seguire particolari traiettorie, adesempio, per operazioni di verniciatura di parti di autoveicoli, per operazioni nellospazio o in ambienti che l’uomo non può frequentare, come il nocciolo di un reattorenucleare.
Un aeromobile. Una navicella spaziale. Una nave. Un veicolo autonomo marino o aereo. Uno scaldabagno il cui obiettivo è quello di portare la temperatura dell’acqua a un
prefissato valore. Una centrale elettrica il cui obiettivo è quello di produrre energia elettrica con valori
della tensione e della frequenza ben definiti. Una raffineria di petrolio. Una batteria lanciarazzi sistemata sopra un veicolo mobile, che può essere assimilata
a un pendolo inverso.Analisi
L'analisi ingegneristica di un sistema reale ha come obiettivo quello di migliorare e, sepossibile, ottimizzare il comportamento del sistema stesso dal punto di vista dell'affidabilità edell’efficienza.
Per effettuare l’analisi di un sistema occorre, anzitutto, individuare le grandezze mediantele quali è possibile stimolare l’evoluzione del sistema, denominate grandezze di ingresso, e legrandezze il cui andamento temporale è di particolare interesse per giudicare le prestazioni delsistema, denominate grandezze di uscita.

2
Per valutare le prestazioni del sistema è, allora, possibile sollecitarlo con opportuniandamenti temporali delle grandezze di ingresso e rilevare i corrispondenti andamentitemporali delle grandezze di uscita.
Tale valutazione può essere condotta nei seguenti due modi:
a) utilizzando un approccio teorico;b) utilizzando un approccio sperimentale.
L'approccio teorico si basa sulla conoscenza di un modello matematico del sistema reale,costituito da un insieme di grandezze e dalle relazioni matematiche far tali grandezze, che siain grado di riprodurre il comportamento del sistema reale, entro prefissati margini ditolleranza, quando il modello e il sistema reale sono sollecitati con gli stessi ingressi edevolvono a partire dalle stesse condizioni iniziali.
In tali ipotesi, è possibile effettuare lo studio del sistema reale utilizzando il modellomatematico ad esso associato. Un aspetto consiste, come già detto, nella determinazione degliandamenti temporali delle grandezze di uscita corrispondenti a certi andamenti temporali dellegrandezze di ingresso, risolvendo le equazioni che costituiscono il modello stesso. L’altroaspetto, ancora più importante, riguarda la individuazione di proprietà del modello che siriflettono sulle prestazioni che il sistema reale è in grado di fornire. L’altro Tale aspetto vienesviluppato mediante esperimenti di simulazione digitale.
Per quanto concerne la determinazione della soluzione delle equazioni che costituiscono ilmodello matematico, si osservi che, in molti casi, risulta impossibile o oneroso dal punto divista computazionale, risolvere analiticamente tali equazioni per via analitica. In generale,conviene determinare un soluzione numerica delle equazioni stesse avvalendosi dell’ausilio diun computer. A tal fine occorre implementare il modello sul computer stesso. Poiché, disolito, il modello matematico che viene associato ad un sistema reale è costituito da equazionidifferenziali mentre i computer sono in grado di eseguire solamente operazioni logiche earitmetiche, l'implementazione del modello richiede l'impiego di opportuni metodi chedipendono dalla sua struttura.
La costruzione di un adeguato modello matematico può essere effettuata:
1. utilizzando tecniche di identificazione che permettono di costruire un modello delsistema a partire da dati sperimentali relativi alle grandezze di ingresso e di uscita inun certo intervallo temporale;
2. utilizzando le leggi della fisica, chimica, economia, etc. che descrivono ilcomportamento dei componenti del sistema.
In entrambi i casi risulta opportuno validare sperimentalmente il modello matematicocostruito sottoponendo, ad esempio, il modello stesso e il sistema reale agli stessi ingressi erilevando e confrontando le corrispondenti risposte.
I vantaggi dell'approccio teorico sono connessi al fatto che non è necessario disporre delsistema reale per la sua analisi che, pertanto, risulta relativamente poco costosa e priva dirischi. Inoltre, è possibile determinare anche l’andamento delle grandezze che non sonoaccessibili per la misura.
Infine, risulta di fondamentale importanza individuare delle proprietà del modello che siriflettono sul comportamento del sistema reale, e di poter verificare se tali proprietà sonosoddisfatte, o meno, senza alcuna necessità di risolvere le equazioni che costituiscono ilmodello stesso.
Gli svantaggi sono connessi al fatto che il modello matematico che può essere associato alsistema costituisce una descrizione approssimata del sistema stesso; inoltre,

3
l’implementazione del modello e il metodo impiegato per la soluzione numerica delleequazioni richiedono sempre il ricorso a certe approssimazioni.
L'approccio sperimentale consiste nell'effettuare alcune prove sperimentali sul sistemareale, sollecitandolo con opportuni andamenti temporali delle grandezze di ingresso erilevando mediante apposita strumentazione gli andamenti temporali delle grandezze di uscita.
I vantaggi di tale approccio sono connessi al fatto che i risultati ottenuti sono relativi alsistema reale e non a una sua rappresentazione matematica approssimata. Gli svantaggi sonoconnessi al fatto che è necessario disporre di un prototipo del sistema su cui eseguire gliesperimenti, il che risulta notevolmente costoso e rischioso per l'integrità del prototipo stesso.Inoltre, particolare cura deve essere posta nella scelta della strumentazione impiegata enell'interpretazione dei risultati ottenuti, poiché i dati rilevati sperimentalmente sono, ingenerale, corrotti da segnali di rumore, cioè segnali aleatori sovrapposti a quelli realiintrodotti dalla modalità con cui opera la strumentazione o da fenomeni di varia natura.
Dalle precedenti considerazioni emerge che un approccio misto teorico-sperimentalefornisce i migliori risultati. Più precisamente, il modello ottenuto utilizzando le leggi chedescrivono i componenti che costituiscono il sistema reale, viene anzitutto validatosperimentalmente su di un prototipo del sistema stesso. L’analisi viene effettuata sul modelloper via teorica, verificando anche se sono soddisfatte o meno le proprietà del modello che siriflettono sulle caratteristiche di funzionamento essenziali del sistema reale. Se il modelloviene ottenuto mediante procedimenti di identificazione, occorre ovviamente disporre di unprototipo sul quale eseguire esperimenti adeguati, rilevando le corrispondenti grandezze diingresso e di uscita, processando, poi, tali dati sperimentali in accordo all’approccio diidentificazione che si intende utilizzare.
SintesiIn generale, i sistemi reali sono solo “potenzialmente” in grado di conseguire gli obiettivi
prefissati (ovvero di comportarsi nella maniera desiderata), nel senso che il conseguimento ditali obiettivi è possibile solamente se su tali sistemi vengono esercitate adatte azionidall’esterno denominate azioni di controllo. Il controllo può esercitarsi con o senzal’intervento diretto dell’uomo; il controllo che si esercita senza l’intervanto diretto dell’uomoviene denominato controllo automatico. Le succitate azioni di controllo vengono generate dalun secondo sistema, denominato sistema controllante o controllore, che vieneopportunamente interconnesso con il sistema al quale si desidera imporre il comportamentodesiderato, denominato sistema controllato.
Esempio 1.1.1Per illustrare gli aspetti fondamentali di un problema di controllo si consideri il seguente
problema analogo a quello del controllo di un pendolo inverso. Il sistema controllato è un’astapoggiata sul palmo della mano di un uomo e il comportamento desiderato è mantenereverticale l’asta stessa muovendo solamente la mano (modalità di controllo 1); altre modalitàche potrebbero essere utilizzate sono quelle di mantenere ferma la mano (modalità dicontrollo 2) e spostarsi nello spazio circostante, oppure muovere nel contempo la mano espostarsi nello spazio circostante (modalità di controllo 3). Ovviamente, il controllo avvienecon l’intervento dell’uomo ed è quindi manuale, cioè non automatico.
E’ facile verificare che quale che sia la modalità di controllo si riesce sempre a conseguirel’obiettivo prefissato. Naturalmente, è più facile conseguire il succitato obiettivo utilizzandola terza modalità di controllo poiché non esistono vincoli sulle azioni di controllo che possonoessere esercitate sull’asta dall’uomo. E’ anche abbastanza semplice mettere in evidenza imeccanismi che portano a conseguire l’obiettivo prefissato.

4
L’uomo spostandosi in varie direzioni o spostando il palmo della mano esercita delleazioni sul sistema controllato; gli organi motori dell’uomo agiscono come attuatori.
La decisione delle azioni più idonee vengono prese dal cervello dell’uomo che agisceda controllore.
Le decisioni vengono prese sulla base delle osservazioni della posizione attualedell’asta e della sua tendenza che esprimono il comportamento effettivo del sistema esulla posizione desiderata dell’asta che esprime il comportamento desiderato o set-point. Più precisamente, le decisioni vengono elaborate a partire dal confronto fra set-point e comportamento effettivo. Il dispositivo di confronto viene denominatocomparatore.
Le osservazioni della posizione attuale dell’asta e della sua tendenza futura vengonocatturate dagli occhi che agiscono da sensori di misura e vengono trasmesse alcervello mediante il sistema nervoso.
Il risultato delle elaborazioni del controllore (il cervello), costituisce la legge dicontrollo che viene trasmessa agli organi motori dal sistema nervoso centrale. Talelegge viene elaborata a partire dai risultati del confronto fra comportamento effettivo edesiderato. L’insieme costituito dal comparatore e dal compensatore viene denominatocontrollore.
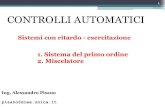
Uno schema a blocchi strutturale che evidenzia i meccanismi succitati è illustrato nella Fig.1. Lo schema a blocchi di Fig. 1 ha validità del tutto generale.
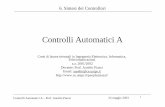
Gli obiettivi considerati nell’esempio illustrato sono analoghi a quelli che è chiamato aperseguire un pendolo inverso il cui schema è riportato nella Fig. 2. Il pendolo è incernieratoalla sommità di un carrello che è azionato da motori elettrici; il movimento del carrello chetrasporta il pendolo può avvenire solamente in una direzione e l’obiettivo che si pone è quellodi mantenere il pendolo in posizione verticale. Con riferimento allo schema di Fig. 1, valgonole seguenti considerazioni.
Fig. 1 Schema a blocchi strutturale del sistema di controllo in esame.
Le informazioni sul comportamento effettivo vengono acquisite misurando l’angoloformato dal pendolo con la direzione verticale attuale. Il sensore di misura potrebbeessere un encoder assoluto che fornisce la misura dell’angolo direttamente in formatodigitale.
Il comparatore e il compensatore possono essere realizzati, rispettivamente, medianteun amplificatore elettronico differenziale e un dispositivo elettronico di tipo analogico.
Comparatore
Compensatore
Attuatoresistema
controllato
Sensori dimisura
Set-point disturbo

5
L’attuatore è costituito dall’insieme dei motori elettrici che sono calettati sulle ruote eforzano il carrello a muoversi in una delle due direzioni ammissibili.
Fig. 2 Pendolo inverso.
Esempio 1.1.2 Si desidera mantenere costante la temperatura all’interno della cabina di unaeromobile a terra e in volo.
Il sistema reale è costituito dai dispositivi di riscaldamento-condizionamento, dalla cabinadell’aeromobile e dall’ambiente esterno. E’ ovvio che tale sistema non è in grado diconseguire l’obiettivo prefissato. Infatti, se il dispositivo di riscaldamento-condizionamentofosse mantenuto sempre in funzione nello stato di riscaldamento, la temperatura all’internodella cabina aumenterebbe fino a un certo valore massimo, mentre se il succitato dispositivofosse mantenuto sempre in funzione nello stato di condizionamento la temperatura dellacabina tenderebbe a un certo valore minimo.
Per conseguire l’obiettivo prefissato occorre interconnettere il succitato sistema con uncontrollore che decida lo stato del dispositivo di riscaldamento-condizionamento in funzionedella temperatura desiderata e di quella attuale nella cabina.
Per quanto concerne la determinazione della legge di controllo, o ciò che è lo stesso, laprogettazione o la sintesi del controllore, esistono due approcci fondamentali, l’approcciobasato su modello e quello basato su regole. Entrambi gli approcci richiedono una descrizionedel comportamento del sistema.
L’approccio basato su modello consiste nella sintesi di un controllore, o più precisamentedi un modello matematico del controllore stesso, in modo tale che l’interconnessione deimodelli del controllore e del sistema reale soddisfino determinate specifiche di progetto.
L’approccio basato su regole richiede la conoscenza di una descrizione linguistica delcomportamento del sistema. Un esempio tipico di controllori basati su regole che coinvolgonovariabili linguistiche è costituito dai controllori fuzzy.
In entrambi i due succitati approcci, dopo aver analizzato, per via torica, il comportamentodell’intero sistema, modello del controllore - modello del sistema reale, si passa alla faserealizzativa del sistema di controllo che consiste nella implementazione del modello delcontrollore su di un adatto dispositivo fisico, opportunamente interconnesso con il sistemareale, e si passa alla fase di sperimentazione sul prototipo.
Conviene, adesso, illustrare alcune notazioni sulle funzioni del tempo e una classificazionedelle grandezze che è possibile associare a un sistema reale.

6

7
Notazioni sulle funzioni del tempo
Sia T l’insieme dei valori del tempo, che può coincidere, o meno, con (, +). Unafunzione del tempo v definita su T verrà indicata con ( )v . Il valore che essa assumeall’istante generico t sarà invece indicato con ( )v t .Si consideri ora un intervallo di osservazione contenuto in T, definito come segue:
0 0 0, : ; ,t t t t t t T
e una funzione del tempo ( )v . Dicesi restrizione di ( )v nell’intervallo 0,t t , o segmento
della funzione ( )v , l’insieme delle coppie ordinate , ( )v con 0,t t . In simboli:
0 0 0, ( , ( )) : ; , , ( ) ( )t tv v v t t t t T v v .
La fig. 1 chiarisce le definizioni precedenti nel caso in cui ( )v sia scalare.
v () 0t ,tv
v (t)
t t0 t
Fig. 1
Una classe di funzioni scalari del tempo si indica con [ ( )]R v . Con [ ( )]R v t invece si indical’insieme dei valori che le funzioni ( )v assumono nei vari istanti di tempo t (codominio) e, ingenere, è un insieme indipendente dal tempo. La classe delle restrizioni delle funzioni ( )v nell’intervallo 0,t t si indica infine con 0 ,t tR .
Quanto detto può facilmente essere esteso al caso di funzioni vettoriali, definite come n–pla difunzioni scalari del tempo. Una generica funzione vettoriale si indica con ( )v e può essererappresentata mediante notazione matriciale, come segue:
1
2
( )
( )( )
( )n
v
v
v
v
Il valore che la funzione ( )v assume all’istante generico t è dato da:

8
1
2
( )
( )( )
( )n
v t
v tt
v t
v
.
Inoltre, si ha:
0 0 0, ( , ( )) : ; , , ( ) ( )t t t t t t T v v v v v .
Classificazione matematica delle grandezze
Le grandezze sono matematicamente caratterizzate dai loro valori numerici variabili, ingenere, nel tempo. Esistono sostanzialmente due criteri per classificare le grandezze: quellobasato sulla natura dei valori del tempo in cui sono definite e quello basato sulla natura deivalori che esse assumono nel tempo.In base all’insieme T dei valori del tempo, le grandezze si distinguono in:
grandezze a tempo continuo, se T coincide con l’insieme, o un sottoinsieme, deinumeri reali (cfr. fig. 2);
le grandezze a tempo discreto, se T coincide o è in corrispondenza biunivoca conl’insieme Z dei numeri interi
t tT -2 -1 0 1 2 3 4 5
TFig. 2 Fig. 3
Una grandezza a tempo discreto è costituita da una sequenza di valori assunti dallagrandezza in corrispondenza a valori discontinui del tempo, indicati usualmente con kt , con
k Z . Esse si possono rappresentare graficamente tramite diagrammi costituiti da sequenzedi punti (cfr. fig. 3).
Per gli scopi di questo corso, è importante considerare grandezze a tempo continuo, allacui classe appartengono le grandezze continue a tratti (cfr. fig. 4). In breve, si consideranocontinue quelle grandezze che, in un dato intervallo temporale di definizione, sono funzioniunivoche del tempo, salvo in un insieme numerabile di istanti, in cui la grandezza medesimarisulta discontinua.
Fig. 4 Grandezza continua a tratti.
1t 2t t

9
In base ai valori numerici, invece, le grandezze sono classificabili in: grandezze a valori continui, se esse possono assumere valori qualsiasi in un dato
intervallo di valori ammissibili; grandezze quantizzate, se possono assumere solo valori appartenenti a un insieme
finito di valori.Le grandezze quantizzate possono essere sia a tempo continuo che a tempo discreto, comeillustrato nella fig. 6.
Una grandezza a tempo continuo e a valori continui viene denominata grandezzaanalogica; una grandezza a tempo discreto e quantizzata viene denominata grandezzadigitale.
tt
a) grandezza quantizzata b) grandezza quantizzataa tempo continuo a tempo discreto
Fig. 6 Esempio di grandezza quantizzata.
Con l’avvento dei dispositivi digitali di elaborazione dell’informazione, al fine di utilizzaretali dispositivi per il trattamento delle grandezze analogiche si è reso necessario trasformaretali grandezze in formato digitale. In proposito, si noti, anzitutto, che le informazioni vengonocodificate in segnali elettrici, usualmente segnali di tensione. Ne consegue che le grandezze diinteresse in un generico sistema vengono codificate in segnali elettrici e quindi possono esseremanipolati da dispositivi elettronici.
L’obiettivo di trasformazione di un segnale analogico in formato digitale viene conseguitoin due passi successivi.
Nel primo passo il segnale viene sottoposto alla operazione di campionamento. Nelcaso ideale, tale operazione consiste nel prelevare valori del segnale (campioni) incorrispondenza a istanti discreti del tempo generalmente ugualmente spaziati di
sT (periodo di campionamento) (cf. Fig. 7).
Nel secondo passo tali campioni vengono convertiti in formato digitale (sequenza dibit) da un convertitore analogico digitale (ADC, Analog-to-Digital Converter). Poichéun ADC fornisce in uscita una configurazione precisa di bit (12, 14, 16 bit), lagrandezza digitale di uscita appare anche quantizzata.

10
a) grandezza analogica
b) grandezza campionataFig. 7 Campionamento di un segnale analogico

11
Cap. 1 Approccio basato su modello per lo studio dei sistemi reali
1.1 Introduzione
Come già detto nell’introduzione al corso, lo studio di un sistema reale verrà effettuato apartire dalla costruzione di un modello matematico del sistema stesso, validatosperimentalmente, ed effettuando lo studio del modello stesso.
Lo studio dei modelli matematici si è evoluto come segue:
sono state individuate classi generali di modelli matematici; sono stati messi a punto metodi di studio per ognuna delle classi individuate.
Tale approccio consente di effettuare lo studio dei sistemi reali prescindendo dalla loro naturafisica, chimica, etc.. Infatti, se sono noti i metodi di studio per una certa classe di modellimatematici si è in grado di effettuare lo studio di tutti quei sistemi reali che possono essererappresentati da modelli appartenenti a tale classe.
1.2 Modello matematico
Il modello matematico di un sistema reale costituisce una rappresentazione matematica delsistema stesso. Tale rappresentazione è un ente astratto, o sistema astratto, costituito da uninsieme di grandezze e dalle relazioni matematiche fra tali grandezze. Ad un sistema realepossono essere associati diversi modelli matematici dipendentemente dalla scelta dellegrandezze che in essi figurano.
Un punto di vista che si assume per associare un modello matematico ad un sistema reale èquello ingresso-uscita che consiste nella scelta, fra tutte le grandezze associate al sistema, diquelle mediante le quali è possibile stimolare l’evoluzione del sistema, denominate comedetto grandezze di ingresso, e di quelle giudicate di particolare interesse per lo studio delsistema, denominate grandezze di uscita. Le grandezze di ingresso e quelle di uscita vengonodenominate grandezze terminali.
Le grandezze di ingresso giocano il ruolo di grandezze indipendenti e vengono suddivise ingrandezze manipolabili e grandezze non manipolabili. Le grandezze manipolabili sono quellegrandezze il cui andamento temporale può essere imposto dallo sperimentatore e, quindi,consentono di guidare l’evoluzione del sistema. Le grandezze non manipolabili sono quelle ilcui andamento temporale non è noto a priori; tali grandezze stimolano l’evoluzione delsistema in maniera indesiderata e, pertanto, vengono denominate grandezze di disturbo odisturbi. Al fine di contrastare gli effetti di tali disturbi, è necessario esercitare sul sistemaopportune azioni di controllo con l’obiettivo di modificare gli ingressi manipolabili
Le grandezze di uscita sono quelle grandezze di particolare interesse per lo studio delsistema. Esse giocano il ruolo di grandezze dipendenti.
L’insieme delle grandezze di ingresso e di uscita e le relazioni matematiche fra taligrandezze costituiscono un ente astratto che appare orientato dall’ingresso verso l’uscita. Lostudio dei sistemi astratti orientati è oggetto della Teoria dei Sistemi, nell’ambito della qualeesso viene definito in maniera rigorosa.
Al fine di generalizzare il concetto di modello matematico, si assuma che il sistema realesia caratterizzato da p grandezze di ingresso e q grandezze di uscita e si indichino con
( ) e ( )j ku t y t i valori assunti all'istante t dalle funzioni che esprimono l'andamento temporale,
rispettivamente dell'ingresso j-esimo e dell'uscita k-esima. La p-pla di numeri 1( ), , ( )pu t u t

12
può essere rappresentata mediante la matrice colonna o vettoreT
1( ) ( ) ( )pt u t u t u
appartenente ad un insieme U che coincide con pR o con un suo sottoinsieme. In manieraanaloga la q-pla di numeri 1( ), , ( )qy t y t può essere rappresentata mediante la matrice
colonna o vettoreT
1( ) ( ) ( )qt y t y t y appartenente a un insieme Y che coincide conqR o con un suo sottoinsieme.Si assuma l'insieme dei valori del tempo ( , )T e siano:
( ) e ( )R R u y due insiemi costituiti, rispettivamente, di tutte le possibili funzioni
di ingresso e di uscita definiti sull’insieme dei valori del tempo T, con le quali èpossibile sollecitare il sistema astratto e che tale sistema è in grado di generare
0 0, , et t t tu y , rispettivamente, un segmento di ingresso e un segmento di uscita
nell'intervallo di osservazione 0,t t , così definiti:
0 0 0[ , ] ( , ( )) : [ , ], ( ) ( ), ,t t t t t t T u u u u
0 0 0[ , ] ( , ( )) : [ , ], ( ) ( ), ,t t t t t t T y y y y
Il modello matematico è costituito da un meccanismo, indicato sinteticamente come segue:
0 0, ,( , ) 0t t t tR u y , (1.2.1)
che permette di generare un insieme costituito da infinite coppie ingresso uscita in ungenerico intervallo di osservazione 0,t t . E’ ovvio che tali coppie corrispondono in manieraapprossimata a quelle generate dal sistema reale poiché nella costruzione di tale meccanismooccorre introdurre opportune ipotesi semplificative.
Gli insiemi ( ) e ( )R R u y vengono denominati, rispettivamente, spazio delle funzioni
di ingresso e spazio delle funzioni di uscita. Gli insiemi di tutti i segmenti diingresso 0 0, , et t t tu y , appartenenti, rispettivamente, agli insiemi eR Ru y vengono
denominati spazio dei segmenti di ingresso e spazio dei segmenti di uscita. Gli insiemi U e Ydei valori che tutte le funzioni ( )u e ( )y assumono all’istante t sono, per ipotesi,indipendenti da t e vengono denominati spazio di ingresso e spazio di uscita. Nel seguito si
supporrà che pU R e qY R .Il modello (1.2.1) si dice statico se l’uscita all’istante t dipende solamente dall’ingresso
allo stesso istante t. Il modello si dice dinamico se l’uscita all’istante t dipende dai valoripassati dell’ingresso ed, eventualmente, anche dall’ingresso all’istante t. Nel seguito sisupporrà che il modello matematico associato a un generico sistema reale sia sempre di tipodinamico.
Un modello matematico dinamico può essere rappresentato in due modi: il modellomatematico ingresso-uscita (i-u) e il modello matematico ingresso-stato-uscita (i-s-u).
1.2.1 Modello ingresso-uscita
Il modello i-u è costituito, in generale, da un sistema di equazioni differenziali che leganovariabili di ingresso e loro derivate e variabili di uscita e loro derivate. Un modello i-u si dice

13
lineare se le equazioni differenziali sono lineari, altrimenti viene detto non lineare. Unmodello i-u si dice stazionario o tempo-invariante se i coefficienti che figurano nelleequazioni differenziali sono costanti, altrimenti viene detto non stazionario o tempo-variante.
Una caratteristica del modello dinamico i-u è che la corrispondenza ingresso-uscita non èunivoca nel senso che a una generica funzione di ingresso applicata a partire dall’istante 0t
incluso possono corrispondere infinite funzioni di uscita dipendentemente dalla storia passatadel sistema fino all’istante 0t escluso, prodotta dai valori passati dell’ingresso. Si noti che 0t
viene escluso poiché si è ammesso che l'intervallo di osservazione comprenda tale istante.
Esempio 1.2.1 Si desidera mantenere costante il livello di un liquido in un serbatoio.
Fig. 1.1.1 Serbatoio.
Il sistema reale è illustrato schematicamente in Fig. 1. Se i uq q il serbatoio si riempie
totalmente; se i uq q il serbatoio si svuota completamente. La grandezza di interesse è il
livello l di liquido nel serbatoio e viene assunta come grandezza di uscita. La grandezza uq si
qualifica come disturbo poiché dipende dalle richieste dell’utenza e, quindi, non può esseremanipolata; tuttavia, essa stimola una evoluzione indesiderata del sistema. La grandezza iq
rappresenta la grandezza che consente di guidare l’evoluzione del sistema e, pertanto, siqualifica come grandezza di ingresso manipolabile.
Una relazione matematica approssimata che descrive il sistema reale è data da:
( )i uq q dt Adl
da cui si ottiene il modello matematico ingresso-uscita:
1( )i u
dlq q
dt A ,
che genera, in maniera approssimata, le coppie ingresso-uscita ( , )iq l del sistema reale in un
generico intervallo di osservazione 0[ , ]t t .
Esempio 1.2.3 Pendolo semplice
Si consideri il pendolo semplice illustrato nella Fig. 2, dove m, l, f e sono,rispettivamente, la massa concentrata alla estremità, la lunghezza del braccio, la forzaapplicata e la posizione angolare istantanea valutata rispetto alla verticale e positivamente inverso antiorario.
uq
uq
iq
iql

14
L'equazione che descrive il comportamento del sistema di Fig. 2 si ottiene dal bilanciodelle coppie all'asse di rotazione ed è data da:
2 sin( )ml b mgl fl ,
dove il termine b rappresenta la coppia di attrito viscoso. Tale equazione costituisce ilmodello matematico ingresso-uscita del sistema meccanico di Fig. 1. Essa genera tutte lepossibili coppie ingresso-uscita ( , )f del sistema stesso in un generico intervallo di
osservazione 0,t t . Il modello in questione è non lineare per la presenza del terzo termine al
primo membro che dipende da sin( ) .
m
lf
Fig. 1.1.2 Pendolo semplice
1.3 Modello matematico i-s-u
Una ulteriore forma in cui può essere rappresentato il meccanismo 0 0, ,( , ) 0t t t tR u y
nell’intervallo di osservazione 0[ ]t ,t è il modello matematico ingresso-stato-uscita.
Tale modello trae origine dalla osservazione che per i sistemi dinamici è possibile, in molticasi, definire una nuova variabile ausiliaria vettoriale, denotata con ( )x , che evolve neltempo unitamente alle variabili di ingresso e di uscita, il cui valore all'istante t,
( ) nt X C x , unitamente a quello dell'ingresso nello stesso istante t, ( )tu , consente dideterminare univocamente l'uscita all'istante t, ( )ty , in accordo alle relazioni:
1 1 1 2 1 2
2 2 1 2 1 2
1 2 1 2
( ) ( ( ), ( ), , ( ); ( ), ( ), , ( ); ),
( ) ( ( ), ( ), , ( ); ( ), ( ), , ( ); ),
( ) ( ( ), ( ), , ( ); ( ), ( ), , ( ); ),
n p
n p
q q n p
y t g x t x t x t u t u t u t t
y t g x t x t x t u t u t u t t
y t g x t x t x t u t u t u t t
che in forma matriciale diventano:
( ) ( ( ), ( ), )t t t ty g x u , (1.3.1)
dove ( )tx , ( )tu , ( )ty e ( , , ) g sono funzioni vettoriali di ordine appropriato, date da:
TT1 2 1 2( ) ( ) ( ) ( ) , ( ) ( ) ( ) ( )n pt x t x t x t t u t u t u t x u ,

15
T T1 2 1 2( ) ( ) ( ) ( ) ,q qt y t y t y t g g g y g .
Le variabili 1 2( ), ( ), , ( )nx t x t x t , nell’intervallo 0[ , ]t t , dipendono dai valori iniziali
1 0 2 0 0( ), ( ), , ( )nx t x t x t delle variabili stesse, e dai segmenti delle variabili di ingresso
0 01,[ , ) ,[ , ), ,t t p t tu u , in accordo alle equazioni:
0 0
0 0
0 0
1 1 0 1 0 0 1,[ , ) ,[ , )
2 2 0 1 0 0 1,[ , ) ,[ , )
0 1 0 0 1,[ , ) ,[ , )
( ) ( , ; ( ), , ( ); , , ),
( ) ( , ; ( ), , ( ); , , ),
( ) ( , ; ( ), , ( ); , , ),
n t t p t t
n t t p t t
n n n t t p t t
x t t t x t x t u u
x t t t x t x t u u
x t t t x t x t u u
che in forma matriciale diventano:
00 0 ,( ) ( , , , )t tt t tx x u , (1.3.2)
dove T1[ ]n è un funzione vettoriale di ordine n, e T
0 1 0 0[ ( ) ( )]nx t x tx Si osservi che ( )tx , se esiste, riassume tutta la storia passata del sistema fino all’istante t
escluso, prodotta dai valori dell’ingresso fino all’istante t escluso, ai fini della previsione deivalori dell’uscita per 0t t .
Se la variabile ( )x esiste, 0x e ( )tx vengono denominati, rispettivamente, stato iniziale e
stato all'istante t, X viene denominato spazio di stato. Le funzioni ( , , , ) e ( , , ) g vengonodenominate, rispettivamente, funzione di transizione di stato e trasformazione di uscita. Ilmodello (1.3.2) e (1.3.1) viene denominato modello i-s-u in forma esplicita.
Nella maggioranza dei casi, la funzione 00 0 ,( , , , )t tt t x u è la soluzione unica di un
sistema di equazioni differenziali del tipo:
1 1 1 2 1 2
2 2 1 2 1 2
1 2 1 2
( ) ( ( ), ( ), , ( ); ( ), ( ), , ( ); ),
( ) ( ( ), ( ), , ( ); ( ), ( ), , ( ); ),
( ) ( ( ), ( ), , ( ); ( ), ( ), , ( ); ),
n p
n p
n n n p
x t f x t x t x t u t u t u t t
x t f x t x t x t u t u t u t t
x t f x t x t x t u t u t u t t
che in forma matriciale si scrivono:
( ) ( ( ), ( ), )t t t tx f x u , (1.3.3)
La funzione vettoriale T1[ ]nf ff viene denominata funzione generatrice e le
equazioni (1.3.3) e (1.3.1) vengono denominate equazioni di stato in forma normale. Taliequazioni costituiscono un modello a tempo continuo, differenziale e proprio. Il modello(1.3.3) e (1.3.1) viene denominato modello i-s-u in forma implicita.

16
Nel seguito verrà considerato il caso in cui nX C . I modelli (1.3.3) e (1.3.1) per i qualipU R , pY R e nX C vengono denominati sistemi a stato vettore o a dimensione finita.
1.4 Proprietà del modello i-s-u.
Le funzioni ( , , ) f e ( , , ) g godono delle seguenti proprietà
Consistenza: 0 0 0 0 0( , , , ( ))t t t x u x , 0t T , 0 X x , ( ) [ ( )]R u u ;
Composizione:0 10 0 [ , ) 1 1 [ , )( , , , ) ( , , ( ), )t t t tt t t t t x u x u , 0 0 1 0, , [ , )t t t t t t , ( ) [ ( )]R u u ,
con0 11 1 0 0 [ , )( ) ( , , , )t tt t tx x u ;
Causalità: lo stato00 0 [ , )( ) ( , , , )t tt t tx x u dipende dall’ingresso nell’intervallo 0[ , )t t .
Osservazione 1.3.1
Si noti che ( )tx non dipende dall'ingresso all'istante t, poiché riassume l'evoluzione
passata del sistema fino all'istante t escluso. Inoltre, ( )tx non dipende dall’ingresso per 0t tpoiché l’evoluzione del sistema per 0t t è riassunta dallo stato iniziale 0x . Infine, ( )tx non
dipende dall'ingresso negli istanti di tempo futuri rispetto all'istante t poiché i modelli chedescrivono i sistemi reali soddisfano la proprietà di causalità, illustrata nella fig. 1.3.1, inaccordo alla quale l'uscita all'istante t non può dipendere dai valori dell'ingresso futuri a t. E'utile, però, considerare, per certe applicazioni, modelli non causali per i quali la succitataproprietà non è valida, ma tali sistemi non sono fisicamente realizzabili.
Osservazione 1.3.2
Com’è noto, condizione sufficiente affinché la succitata equazione differenziale ammettasoluzione unica è che la ( , , ) f soddisfi la condizione di Lipschitz in accordo alla quale:
( ) : ( ) , ( ) ( ( ), ( ), ) ( ( ), ( ), ) ( ) ( ) ,M t X t X t t t t t t M t t t u x z f x u f z u x z .
Conviene osservare che non è sempre possibile riassumere la storia passata di un sistemacon una n-pla di numeri. In alcuni casi occorre definire lo stato come una funzione di una opiù variabili piuttosto che una n-pla di numeri. In tali casi, la determinazione di un modello i-s-u può risultare molto complessa. Un esempio è costituito da un elemento di puro ritardodescritto dal modello i-u:
( ) ( )y t u t .
Un modello di tale tipo si ha nella descrizione matematica di un nastro trasportatore dilunghezza L che si muove a velocità costante V ( L V ) o di una linea di trasmissione disegnali. Nel caso in questione, l’uscita nell’intervallo [ , ( 1) )n n richiede la conoscenzadell’intera funzione di ingresso nell’intervallo [( 1) , )n n , piuttosto che una sempliceennupla di numeri.
L'esame delle (1.3.1) e (1.3.3) mette in luce l'esistenza di una funzione ( , , , ) tale che:

17
000 0 0 0 ,,( ) ( ( , , , ), ( ), ) ( , , , )t tt tt t t t t t t y g x u u x u . (1.3.3)
Le equazioni (1.3.2) e (1.3.3) costituiscono un modello in forma esplicita del sistema.Se le funzioni ef g non dipendono esplicitamente dal tempo il modello (1.3.2) e (1.3.1)
si dice stazionario o tempo-invariante. Se le funzioni ef g sono lineari rispetto a( ) e ( )t tx u cioè del tipo:
( ) ( ) ( ) ( )t t t t f A x B u ,( ) ( ) ( ) ( )t t t t g C x D u ,
dove ( ), ( ), ( ) e ( )t t t tA B C D sono matrici dipendenti dal tempo, rispettivamente di ordine, , en n n p q n q p , il modello risultante dato da:
( ) ( ) ( ) ( ) ( )t t t t t x A x B u , (1.3.4)( ) ( ) ( ) ( ) ( )t t t t t y C x D u , (1.3.5)
si dice lineare e non stazionario (o tempo-variante). Se le succitate matrici( ), ( ), ( ) e ( )t t t tA B C D sono indipendenti dal tempo, il modello (1.3.4)-(1.3.5) si dice
stazionario (o tempo-invariante).
Fig. 1.3.1 Principio di causalità: a) sistema causale; b) sistema non causale.Osservazione 1.3.3
Esempio 2.4 Rappresentazione con lo stato per un sistema reale costituito da un insiememassa-molla-smorzatore.
0t
0t
a)
b)
t
t
u
uy
y

18
Fig. 1.3.2 Sistema massa-molla-smorzatore
Indicando con s lo spostamento del carrello, valutato positivamente verso destra, il modellodel sistema di Fig. 1.3.2 è dato da:
m s b s k s f .
Assumendo:
1 2,x s x s ,
si ha:
1 2x x ,
2 1 21k b
x x x fm m m
.
In forma matriciale, il modello diviene:
1 1
2 2
0 1 0
1x x
uk bx x
m m m
,
dove ( ) ( )u t f t . Ponendo:
1
2
0 1 0, , 1
xk b
xm m m
x A b , 1 0T c ,
e scegliendo come uscita y s , si ottiene il modello i-s-u lineare e stazionario dato da:
u x A x b .
( ) Ty t c x .Osservazione 1.3.4
La stazionarietà di un modello comporta che le risposte nello stato e nell’uscita ad uningresso traslato di h secondi lungo l’asse dei tempi e a un arbitrario stato iniziale, sono parialle risposte corrispondenti allo stesso ingresso non traslato e allo stesso stato iniziale traslateanch’esse di h secondi lungo l’asse dei tempi, come illustrato nella fig. 1.3.2, dove hT è
l’operatore di traslazione che applicato a una funzione ( ) :f T F produce una funzione
( ) :hT f T F tale che:
molla, k
smorzatore, b
carrello, m
f

19
( ) ( )hT f t f t h .
Pertanto, per lo studio dei sistemi stazionari è possibile porre 0 0t , senza ledere la generalità.
Osservazione 1.3.5
La linearità implica il seguente principio generalizzato di sovrapposizione degli effetti:
Siano 1 1( ) e ( ) x y ( 2 2( ) e ( ) x y ) le risposte corrispondenti all’ingresso 1 2( ) ( ( )) u u e allo
stato iniziale 10 20 ( )x x . Allora, le risposte all’ingresso 1 1 2 2( ) ( )k k u u e allo stato iniziale
1 10 2 20k kx x sono date, rispettivamente, da 1 1 2 2( ) ( )k k x x e 1 1 2 2( ) ( )k k y y .
Tale principio verrà dimostrato successivamente con riferimento ai modelli lineari estazionari.
Fig. 1.3.2 Implicazione della proprietà di stazionarietà dei modelli.
Osservazione 1.3.6
Non esistono sistemi reali che possano essere rappresentati da modelli rigorosamentestazionari. Infatti, tutti i sistemi reali modificano il loro comportamento nel corso del lorofunzionamento. A titolo di esempio, tutti i sistemi realizzati mediante dispositivi elettronicimodificano le proprie caratteristiche e prestazioni con il tempo a causa dell’invecchiamentodei componenti, o delle modifiche di condizioni ambientali; un missile che viaggia nellospazio modifica il suo comportamento a causa del consumo di carburante che producevariazioni di pesi, momenti di inerzia, ecc..
Tuttavia, dal punto di vista ingegneristico e per assegnato intervallo di osservazione, se lecaratteristiche del sistema variano lentamente rispetto all’intervallo di osservazione, al sistemastesso è possibile associare un modello stazionario.
Osservazione 1.3.7
Analogamente alla proprietà di stazionarietà, non esistono sistemi reali che possano essererappresentati da modelli rigorosamente lineari. Se le escursioni delle grandezze in gioco nonsuperano determinati livelli è possibile associare al sistema reale un modello lineare.
0t
t
u y
0t h
hT u hT y
yTh

20
I vantaggi del modello i-s-u rispetto al modello i-u sono i seguenti:
1. La struttura del modello i-s-u è indipendente dal numero delle variabili di ingresso e diuscita, cioè per sistemi SISO (single input, single output) e MIMO (multi inputs, multioutputs).
2. La conseguenza di 1 è che le proprietà di tali modelli possono essere definite e studiateutilizzando le stesse metodologie.
3. Il modello i-s-u consente di studiare in modo semplice la classe di sistemi reali a strutturavariabile, che possono essere descritti da una famiglia di sottomodelli, ognuno dei qualidescrive il sistema reale in certe condizioni di funzionamento (vedi esempio suiconvertitoriDC/DC).

21
Cap. 2 Studio nel dominio del tempo di rappresentazioni lineari, stazionarie,differenziali, proprie, a dimensioni finite e a tempo continuo.
2.1 Risposte nello stato e nell’uscita.
I modelli lineari, stazionari, differenziali, propri, a dimensioni finite e a tempo continuo,come già detto, hanno la seguente struttura:
( ) ( ) ( )t t t x Ax Bu , (2.1.1)( ) ( ) ( )t t t y Cx Du , (2.1.2)
dove le matrici A, B, C e D hanno dimensioni:
: , : , : , :n n n p q n q p A B C D .
Se risulta D 0 , cioè se manca il legame diretto ingresso–uscita all’istante t, larappresentazione (2.1.1)-(2,1,2) si dice puramente dinamica o strettamente propria.
Si osservi che il modello in questione viene anche denominato sistema (astratto), e talesistema si dice puramente dinamico se risulta D 0 .
Nel seguito, per sistema si intenderà il sistema astratto, o modello matematico, chedescrive matematicamente un sistema reale.
Ci si pone, adesso, il seguente problema: determinare la risposta nello stato e nell’uscitaall’istante 0t t corrispondente allo stato iniziale 0x all’istante 0t e all’ingresso
0[ , ]t tu .
La soluzione di tale problema è data dalla seguente asserzione.
Asserzione 2.1.1 Le risposte nello stato e nell’uscita all’istante 0t t corrispondente allo stato
iniziale 0x all’istante 0t e all’ingresso0[ , ]t tu sono date da:
00
0 0 [ , ) 0 0( ) ( , , , ) ( ) ( ) ( )t
t t tt t t t t t d x x u x H u , (2.1.3)
00
0 0 [ , ] 0 0( ) ( , , , ) ( ) ( ) ( )t
t t tt t t t t t d y x u x W u , (2.1.4)
dove:
( ) , ( ) , ( ) , ( ) ( )t t t tt t t t t A A A Ae H e B Ce W Ce B D . (2.1.5)
Prova. Dalla (2.1.1), premoltiplicando per te A si ottiene:
[ ( ) ( )] ( )t te t t e t A Ax Ax Bu . (2.1.6)
Il primo membro della (2.1.6) è la derivata rispetto al tempo di ( )te t A x . Infatti, si ha (cfr.Appendice 2.1.1):
( ) ( ) ( )t t tde t e t e t
dt A A Ax x Ax .

22
Ne consegue che la (2.1.6) può essere scritta come segue:
( ) ( )t tde t e t
dt A Ax Bu . (2.1.7)
Integrando la (2.1.7) fra 0t e t, si ha:
0 0( ) ( )
t t
t t
de d e d
d
A Ax Bu ,
la cui soluzione è:
0
00( ) ( ) ( )
ttt
te t e t e d AA Ax x Bu .
Premoltiplicando per te A si ottiene:
0
0
( ) ( )0( ) ( ) ( )
tt t t
tt e t e d A Ax x Bu , (2.1.8)
che, tenendo conto delle (2.1.5) assume la forma (2.1.3).Sostituendo nella (2.1.2) la (2.1.8), si ottiene:
0
0
( ) ( )0( ) ( ) ( ) ( )
tt t t
tt e t e d t A Ay C x Bu Du . (2.1.9)
Osservando che, per la proprietà campionatrice dell’impulso, ( )tDu può essere scritto comesegue:
0( ) ( ) ( )
t
tt t d Du Du ,
la (2.1.9) diviene:
0
0
( ) ( )0( ) ( ) ( ) ( )
tt t t
tt e t e t d A Ay C x C B D u ,
che, tenendo conto delle (2.1.5), coincide con la (2.1.4).
Si noti che la conoscenza della matrice esponenziale permette il calcolo di tutte le matricidel modello esplicito. Inoltre, al fine di tenere conto di eventuali discontinuità e della presenzadi impulsi all’istante 0t nella funzione d’ingresso, il limite inferiore di entrambi gli integrali èesteso a
0t , cioè a 0t con piccolo a piacere.
La matrice ( )t viene denominata matrice di transizione di stato, mentre le matrici ( )tHe ( )tW vengono denominate, rispettivamente, matrice delle risposte impulsive nello stato e

23
matrice delle risposte impulsive nell’uscita o, più semplicemente, matrice delle risposteimpulsive.
Ponendo 0( ) 0t t t u nelle (2.1.3) e (2.1.4), si ottengono le risposte in evoluzione
libera nello stato e nell’uscita date, rispettivamente da:
00 0 [ , ) 0 0( ) ( , , , ) ( )l t tt t t t t x x 0 x , (2.1.10)
00 0 [ , ] 0 0( ) ( , , , ) ( )l t tt t t t t y x 0 x . (2.1.11)
Ponendo 0 x 0 nelle (2.1.3) e (2.1.4) si ottengono le risposte in evoluzione forzata nello
stato e nell’uscita date, rispettivamente, da:
00
0 [ , )( ) ( , , , ) ( ) ( )t
f t t tt t t t d x 0 u H u , (2.1.12)
00
0 [ , ]( ) ( , , , ) ( ) ( )t
f t t tt t t t d y 0 u W u , (2.1.13)
Osservazione (2.1.1). Le relazioni (2.1.3) e (2.1.4) mostrano che la linearità del modellomatematico implica che le due cause di evoluzione del sistema, cioè lo stato iniziale 0x e
l’ingresso 0 ,t tu danno luogo a due evoluzioni indipendenti fra loro, le risposte libera e
forzata, la cui somma determina l’evoluzione completa del sistema.
Osservazione (2.1.2). Dalle relazioni (2.1.3) e (2.1.4) si evince che la stazionarietà delmodello matematico implica che la risposta corrispondente allo stato iniziale 0x all’istante 0t
e all’ingresso 0 ,t tu si ottiene traslando di 0t la risposta corrispondente allo stato 0x
all’istante 0 e all’ingresso 0 ,ot t tT u . Infatti, con riferimento alla risposta nello stato, si ha:
0 00 [ , ) 0 00( ,0, , ) ( ) ( ) ( )
t
t t tt T t t t d x u x H u , (2.1.14)
0
0 0 00 [ , ) 0 0 0 00( ,0, , ) ( ) ( ) ( ) ,
t t
t t t tT t T t t t t t d
x u x H u (2.1.15)
Ponendo 0t la (2.1.15) diviene:
0 0 0 00
0 [ , ) 0 0 0 0 [ , )( ,0, , ) ( ) ( ) ( ) ( , , , )t
t t t t t ttT t T t t t d t t x u x H u x u . (2.1.16)
Osservazione (2.1.3). La struttura delle (2.1.3) e (2.1.4) rende immediata la verifica delprincipio generalizzato di sovrapposizione degli effetti.
2.2 Interpretazione dell matrici ( ), ( ), ( ) ( )t t t e t H W .
Per quanto concerne la matrice ( )t , assumendo 0 0t e 0 kx , dove:

24
T[0 0 1 0 0]
-esimo
k
k
, (2.2.17)
la risposta libera nello stato, lkx diviene:
( ) ( ) ( )lk k kt t t x , (2.2.18)
dove ( )k t è la k-esima colonna della matrice ( )t . Ne consegue che la k-esima colonna
della matrice ( )t è la risposta libera nello stato corrispondente allo stato iniziale k avente
componenti tutte nulle eccetto la k-esima che è pari a 1.Con riferimento alla matrice ( )tH , assumendo 0 0t , 0 x 0 e:
( ) ( )kt t u , (2.2.19)
la risposta forzata nello stato, ( )f k tx , per la proprietà campionatrice dell’impulso, è data da:
0( ) ( ) ( ) ( ) ( )
t
f k k k kt t d t t x H H h , (2.2.20)
dove ( )k th è la colonna k-esima della matrice ( )tH . Ne consegue che la colonna k-esima
della matrice ( )tH è la risposta forzata nello stato, corrispondente a un ingresso aventecomponenti tutte nulle eccetto la k-esima che è pari a un impulso di Dirac localizzatonell’origine.
Tale interpretazione giustifica la denominazione della matrce ( )tH e mette in evidenza ilseguente vincolo su ( )tH :
( ) , 0t t H 0 , (2.2.21)
che è una conseguenza della proprietà di causalità del modello con lo stato. Infatti, taleproprietà implica che l’effetto segue sempre la causa e, di conseguenza, la generica colonna k-esima di ( )tH deve risultare nulla per tempi negativi che precedono l’applicazionedell’ingresso.
In maniera del tutto analoga, la risposta libera nell’uscita corrispondente allo stato iniziale(2.2.17), ( )lk ty , e la risposta forzata nell’uscita corrispondente all’ingresso (2.2.19), ( )f k ty ,
sono date da:
( ) ( ) ( )lk k kt t t y , (2.2.21)
0( ) ( ) ( ) ( ) ( )
t
f k k k kt t d t t y W W w . (2.2.22)
Tale interpretazione mette in evidenza il vincolo su ( )tW :
( ) 0t t W 0, .

25
2.3 Trasformazioni di coordinate e forme canoniche.
2.3.1 Trasformazione di coordinate.
Com’è noto, in uno spazio vettoriale nC è possibile rappresentare geometricamente i suoi
elementi scegliendo una base 1
nt i i
B t i cui vettori , =1, ,i i nt , linearmente indipendenti,
sono elementi dello spazio vettoriale stesso. La rappresentazione geometrica di un genericoelemento ( ) nt Cx nella base tB è unica ed è data da:
1ˆ( ) ( )
n
i ii
t x t
x t ,
la quale, in forma matriciale, può essere scritta come segue:
ˆ( ) ( )t tx Tx , (2.3.1)
dove T è una matrice n n non singolare le cui colonne sono costituite dai vettori della base.
Gli elementi ˆ ( )ix t di ˆ( )tx sono le componenti di ( )tx nella base 1
ni it . Tali componenti
possono essere determinate conoscendo la base reciproca 1
nrt ti i
B r della base data,
definita dalle relazioni:
T 1,( , )
0,tj i tj i
i j
i j
r t r t , (2.3.2)
dove i simboli (*) e ( T ) indicano, rispettivamente, le operazioni di coniugazione di vettori adelementi complessi e di trasposizione. Infatti, si ha:
1 1ˆ ˆ ˆ ˆ ˆ( , ( )) ( , ( )) ( , ( )) ( , ( )) ( )( , ) ( )
n n
tj tj i i tj i i tj j j j tj j ji i
t x t x t x t x t x t
r x r t r t r t r t .
Osservazione (2.2.1) Si ricorda che se X è uno spazio vettoriale a dimensione finita, a talespazio si può associare l’operatore prodotto scalare, denotato con ( , )i jx x , con
, ni j X C x x , che soddisfa le seguenti proprietà:
( , ) 0, x x x 0 ,*( , ) ( , )i j j ix x x x ,
*( , ) ( , )i j i j x x x x ,
( , ) ( , ) ( , )i j k i j j k x x x x x x x .
Dalla seconda e dalla terza proprietà si ottiene:

26
* * * *( , ) ( , ) [ ( , )] ( , ) ( , )i j j i j i j i i j x x x x x x x x x x .
Il prodotto scalare viene calcolato mediante l’espressione *( , ) ( )Ti j i jx x x x , che soddisfa
tutte le proprietà precedentemente illustrate.
Sussiste la seguente Asserzione
Asserzione 2.3.1 Sia dato il modello (2.1.1) e (2.1.2) e si consideri la trasformazione dicoordinate nello spazio di stato (2.3.1), dove T è una matrice n n , non singolare e a elementicostanti la cui j-esima colonna è il vettore j-esimo della base scelta. In tale base, il modellomatematico è costituito dalle equazioni:
ˆ ˆˆ ˆ( ) ( ) ( )t t t x Ax Bu , (2.3.3)ˆ ˆ( ) ( ) ( )t t t y Cx Du , (2.3.4)
dove:
1 1ˆ ˆˆ ˆ, , , A T AT B T B C CT D D . (2.3.5)
Inoltre, i modelli (2.1.1) - (2.1.2) e (2.3.3) - (2.3.4) sono equivalenti, nel senso che generanole stesse coppie ingresso-uscita, e fra gli stati iniziali 0x e 0x vale la relazione invertibile
0 0ˆx Tx .
Prova. Sostituendo la (2.3.5) nelle (2.1.1) e (2.1.2), si ottiene:
ˆ ˆ( ) ( ) ( )t t t Tx ATx Bu . (2.3.6)ˆ( ) ( ) ( )t t t y CTx Du (2.3.7)
Premoltiplicando per 1T la (2.3.6), si ottiene:
1 1ˆ ˆ( ) ( ) ( )t t t x T ATx T Bu . (2.3.8)
Le (2.3.8) e (2.3.7) hanno la struttura (2.3.3) e (2.3.4) con le posizioni (2.3.5).Per mostrare che i due modelli sono equivalenti, basta osservare che il modello in forma
esplicita corrispondente alle (2.3.3) e (2.3.4) è dato da:
00
0 0 [ , ) 0 0ˆ ˆˆˆ ˆ ˆ( ) ( , , , ) ( ) ( ) ( )
t
t t tt t t t t t d x x u x H u , (2.3.9)
00
0 0 [ , ] 0 0ˆ ˆˆ ˆ ˆ( ) ( , , , ) ( ) ( ) ( )
t
t t tt t t t t t d y x u x W u , (2.3.10)
dove:

27
ˆ 2 2 1 1 1 1 2
1 2 2 1
1 1ˆ ˆˆ ( )2! 2!
1 = ( ) ,
2!
t
t
t e t t t
t t e
A
A
I A A T T T AT T ATT AT
T I A A T T T
(2.3.11)ˆ 1 1 1ˆ ˆ( ) t t tt e e e A A AH B T TT B T B , (2.3.12)
ˆ 1ˆ ˆ( ) t t tt e e e A A AC CTT T C T , (2.3.13)ˆ 1 1ˆˆ ˆ ˆ( ) ( ) ( ) ( ) ( )t t tt e t e t e t t A A AW C B D CTT TT B D C B D W . (2.3.14)
La (2.3.10) mostra che 10 0 0ˆ x x T x tale che l’uscita del modello (2.1.1) e (2.1.2)
coincide con quella del modello (2.3.3) e (2.3.4) per tutte le funzioni di ingresso. Ovviamente,vale anche il viceversa, cioè 0 0 0ˆ x x Tx tale che l’uscita del modello (2.1.1) e (2.1.2)coincide con quella del modello (2.3.3) e (2.3.4) per tutte le funzioni di ingresso. Ciò implicache la due rappresentazioni sono equivalenti.
2.3.2 Forme canoniche
Nel paragrafo precedente è stato mostrato che una trasformazione di coordinate nellospazio di stato porta a un nuovo modello con lo stato equivalente a quello di partenza ma con
matrici ˆ ˆˆ, eA B C diverse dalle matrici , eA B C del modello di partenza. Scegliendoopportunamente la base nello spazio di stato è possibile, in certe condizioni, pervenire a un
modello le cui matrici ˆ ˆˆ, eA B C aventi struttura conveniente per risolvere alcuni problemi dianalisi e sintesi. Tali modelli vengono denominati forme canoniche.
Nel caso di modelli con ingresso e uscita unidimensionali, le forme canoniche di interessesono la forma canonica di controllo, la forma canonica di osservazione e la forma canonicadiagonale.
Forma canonica di controllo. Le matrici A e b sono date da:
0 1 2 n 2 n 1
0 1 0 0 0 0
0 0 1 0 0 0
,
0 0 0 0 1 0
1a a a a a
A b
, (2.3.15)
mentre la matrice Tc è arbitraria. Gli elementi dell’ultima riga della matrice A sono icoefficienti del polinomio caratteristico ( ) della matrice A, dato da:
11 1 0( ) n n
na a a (2.3.16)
Forma canonica di osservazione. Le matrici A e c sono date da:

28
n 1
n 2
1
0
1 0 0 0 1
0 1 0 0 0
,
0 0 0 1 0
0 0 0 0 0
a
a
a
a
A c
, (2.3.17)
mentre la matrice b è arbitraria. Gli elementi della prima colonna sono i coefficienti delpolinomio caratteristico ( ) dato dalla (2.3.16).
Forma canonica diagonale.
La matrice A è data da:
1
2
n
0 0
0 0
0 0
A
, (2.3.18)
mentre le matrici b e Tc sono arbitrarie. Gli elementi della diagonale principale della matrice(2.3.18) sono gli zeri del polinomio caratteristico (2.3.16), ovvero gli autovalori della matriceA.
Osservazione 2.3.1 Come verrà illustrato nel seguito, l’esistenza di una trasformazione dicoordinate nello spazio di stato, che permetta di passare dal modello assegnato a una delleforme canoniche mostrate in precedenza, è condizionata dal soddisfacimento di ben precisecondizioni sul modello di partenza.
2.4 Analisi modale
Le espressioni (2.1.3) e (2.1.4) consentono di determinare le risposte nello stato e nell’uscitama non mettono in evidenza il modo in cui evolve il sistema. Verrà adesso mostrato chescegliendo in maniera opportuna la base nello spazio di stato è possibile individuare modielementari di evoluzione del sistema che dipendono dalla struttura del modello e quindi dallematrici A, B, C e D. Tali modi godono delle proprietà: a) le risposte libere nello stato enell’uscita possono essere espresse mediante combinazione lineare dei modi; b) le risposteforzate nello stato e nell’uscita possono essere ottenute a partire dai modi elementari stessi.
Nel seguito verrà sviluppata l’analisi modale nel caso di autovalori distinti, rimandandoquella corrispondente ad autovalori multipli che verrà sviluppata nell’ambito dello studio neldominio di s.
2.4.1 Risposta nello stato
Si ammetta che la matrice A abbia autovalori distinti. Ne consegue che il suo polinomiocaratteristico ( ) , ossia il determinante della matrice I A , è dato da:

29
1
( ) ( )n
ii
,
dove le costanti ( 1, , )i i n , cioè gli zeri del polinomio caratteristico, sono gli autovalori.
In tali condizioni, gli autovettori iv associati agli autovalori i , definiti come quei vettori non
nulli tali che:
i i iAv v , (2.4.1)
risultano linearmente indipendenti e possono quindi essere scelti come base per lo spazio distato X.Ne consegue che il generico elemento ( )tx dello spazio di stato può essere rappresentatogeometricamente come combinazione lineare degli autovettori, come segue:
1
ˆ( ) ( )n
i ii
t x t
x v , (2.4.2)
dove ˆ ( )ix t rappresenta la componente di ( )tx lungo l’autovettore iv . La (2.4.2) può essere
scritta come segue:
1
21 2
ˆˆ
ˆ( ) ( )
ˆ
n
n
x
xt t
x
x v v v Tx
, (2.4.3)
dove la matrice T data da:
1 2 nT v v v , (2.4.4)
è una matrice n n non singolare essendo gli autovettori linearmente indipendenti e:
T1 2ˆ ˆ ˆ ˆ( ) nt x x xx .
La (2.4.3) stabilisce una trasformaione di coordinate dalla base arbitraria di partenza allabase costituita dagli autovettori. La matrice T viene denominata matrice modale. Dal par.(2.3.2) è noto che il modello matematico del sistema nella nuova base è dato dalle (2.3.6) e
(2.3.7) dove le matrici ˆ ˆˆ, eA B C assumono le espressioni seguenti.
Matrice A
Per il calcolo della matrice A occorre determinare la matrice 1T . A tale proposito,ponendo:

30
T1
1
T
,
n
q
T
q
e tenendo presente la (2.4.4), si ha:
T T T1 1 1 1
11 2
T T T1
n
n
n n n n
q q v q v
T T v v v I
q q v q v
,
da cui deriva:
T 1,
0,i j
i j
i j
q v .
Ne consegue che i vettori iq coincidono con i vettori coniugati della base reciproca della base
costituita dagli autovettori. Più pecisamente, denotando con ir i vettori della base reciproca, si
ha * 1, ,i i i n r q , e quindi:*
11
*
T
Tn
r
T
r
. (2.4.5)
La matrice A , per la (2.4.5), risulta:
1 1 1 11 1 1 1
ˆn n n n A T AT T A v v T Av Av T v v ,
(2.4.6)
dove 1diag( , , , )n n .
Matrice B
Adesso, partizionando la matrice B come segue:
1 p B b b ,
si ha:
1 1 11
1
( , ) ( , )ˆ
( , ) ( , )
p
n n p
r b r b
B T B
r b r b
. (2.4.7)

31
Le (2.4.5) e (2.4.7) mostrano che la dinamica delle componenti di ( )tx lungo gli auovettori
iv è espressa dalla relazione:
1
ˆ ˆ( ) ( ) ( , ) ( )p
i i i i j jj
x t x t u t
r b , (2.4.8)
la quale mostra che le componenti del vettore di stato lungo gli autovettori evolvonoindipendentemente l’una dall’altra risultando, quindi, disaccoppiate. Tale evoluzione,corrispondente allo stato iniziale 1
0 0ˆ x T x , è descritta dalla relazione:
( )0 0
1
ˆ ˆ( ) ( , ) ( )i i
p tt ti i i j j
j
x t e x e u d
r b ,
dove 0ˆix , componente di 0x lungo iv , è data da 0 0ˆ ( , )i ix r x . Ne consegue che:
( )0 0
1
ˆ ( ) ( , ) ( , ) ( )i i
p tt ti i i j j
j
x t e e u d
r x r b . (2.4.9)
Infine, dalla (2.4.2), si ottiene:
( )0 0
1 1 1
( ) ( , ) ( , ) ( )i i
pn n tt ti i i j i j
i i j
t e e u d
x r x v r b v . (2.4.10)
Ponendo nella (2.4.10) ( )t t u 0 , si ottiene la seguente espressione della risposta liberanello stato:
01
( ) ( , )i
nt
l i ii
t e
x r x v . (2.4.11)
La (2.4.11) mette in evidenza che la risposta libera nello stato corrispondente a un genericostato iniziale 0x è una combinazione lineare di modi elementari di evoluzione del sistema dati
da itie v . I coefficienti di tale combinazione sono le componenti di 0x lungo gli autovettori
iv . Il generico coefficiente 0( , )ir x viene denominato eccitazione del modo i dovuta allo stato
iniziale.
Osservazione 2.4.1 I modi elementari di evoluzione del sistema dipendono esclusivamentedalla matrice dinamica A. Inoltre, l’eccitazione del modo i è indipendente da quella degli altrimodi e dipende solo dallo stato iniziale.
Ponendo nella (2.4.10) 0 x 0 si ottiene la seguente espressione della risposta forzata nello
stato:
( )
0 01 1 1 1
( ) ( , ) ( ) ( , ) ( )i i i
p pn nt tt tf i j i j i i j j
i j i j
t e u d e e u d
x r b v v r b , (2.4.12)

32
che mette in evidenza che i modi elementari del sistema influiscono anche sulla rispostaforzata ma in modo non lineare.
Sollecitando, adesso, il sistema con un ingresso u(t) avente componenti tutte nulle eccettola componente k-esima pari a un impulso localizzato nell’origine, si ha:
( )
01 1
( ) ( ) ( , ) ( ) ( , )i i
n nt t tf k k i k i i k i
i i
t t e d e
x h r b v r b v , (2.4.13)
dove ( )k th è la k-esima colonna della matrice ( )tH . La (2.4.13) mostra che la colonna k-
esima della matrice delle risposte impulsive nello stato è data da una combinazione lineare diquei modi elementari del sistema per i quali risulta ( , ) 0i k r b , che sono eccitati da un
impulso applicato all’ingresso k-esimo quando tutti gli altri ingressi sono nulli. Sussistono, inproposito, la seguente definizione e il seguente teorema.Definizione 2.4.1 Un modo si dice eccitabile mediante impulsi in ingresso se compare inalmeno una colonna della matrice ( )tH .
Teorema 2.4.1 Condizione necessaria e sufficiente affinché il modo i–esimo sia eccitabilemediante impulsi in ingresso è che esista almeno una colonna della matrice B tale che risulti
( , ) 0i k r b , ovvero si abbia *T 0i r B .
Osservazione 2.4.2 I vettori della base reciproca dipendono dalla matrice A e, pertanto, lacondizione di eccitabilità dei modi è una proprietà di tipo strutturale che dipende, cioè, dallastruttura del modello.
2.4.2 Risposta nell’uscita
Sostituendo la (2.4.10) nella (2.1.2), si ottiene:
( )0 0
1 1 1 1
( ) ( , ) ( , ) ( ) ( )i i
p pn n tt ti i j j i j j
i i j j
t e e u d u t
y r x r b Cv d . (2.4.14)
Ponendo nella (2.4.14) ( )t t u 0 , si ottiene la seguente espressione della risposta liberanell’uscita:
01
( ) ( , )i
nt
l i ii
t e
y r x Cv . (2.4.15)
La (2.4.15) mostra che assumendo che il modo i-esimo sia eccitato dallo stato iniziale 0x ,
esso figurerà nella risposta libera nell’uscita se i Cv 0 . Tale modo evolve lungo il vettore
iCv che può essere considerato come la proiezione di iv nello spazio di uscita.
Sussistono, in proposito, la seguente definizione e il seguente teorema.
Definizione 2.4.2 Un modo si dice osservabile attraverso l’uscita se compare nella espressionedella risposta libera nell’uscita.

33
Teorema 2.4.2 Condizione necessaria e sufficiente affinché il modo i–esimo sia osservabileattraverso l’uscita è che risulti i Cv 0 .
Osservazione 2.4.2 I vettori della base dipendono dalla matrice A e, pertanto, la condizione diosservabilità attraverso l’uscita è una proprietà di tipo strutturale che dipende, cioè, dallastruttura del modello.
Ponendo 0 x 0 nella (2.4.14), si ha la seguente espressione della risposta forzata
nell’uscita:
( )
01 1 1
( ) ( , ) ( ) ( )i
p pn t tf i j i j j j
i j j
t e u d u t
y r b Cv d
01 1 1
( , ) ( ) ( )i i
p pn tti i j j j j
i j j
e e u d u t
Cv r b d , (2.4.16)
da cui emerge che la risposta forzata nell’uscita dipende dai modi elementari del sistema inmaniera non lineare. Assumendo che l’ingresso abbia la forma ( ) ( )kt tu , la (2.4.16) si
particolarizza come segue:
1
( ) ( ) ( , ) ( )i
nt
f k k i k i ki
t t e t
y w r b Cv d , (2.4.17)
la quale mostra che la k-esima colonna della matrice delle risposte impulsive, per 0t , è unacombinazione linere di quei modi che risultano nel contempo eccitabili mediante impulsi iningresso e osservabili attraverso l’uscita. Inoltre, per 0t , tal colonna contiene un impulsonell’origine se k d 0 .
2.4.3 Interpretazione geometrica dei modi
Se la matrice dinamica ha elementi reali, i coefficienti del suo polinomio caratteristicosono reali e gli autovalori possono essere reali o, a coppie, complessi e coniugati. Si ammetta,inoltre, che anche lo stato iniziale sia reale. In queste condizioni è possibile individuare modinaturali di evoluzione corrispondenti ad autovalori reali, denominati modi aperiodici, ecombinare i modi elementari relativi alle coppie di autovalori complessi e coniugati ottenendofunzioni pseudoperiodiche, denominate modi pseudoperiodici.Per calcolare tali modi si noti che:
a) gli autovettori associati ad autovalori reali, i , sono reali;
b) gli autovettori associati ad autovalori complessi sono complessi. In particolare,l’autovettore associato al generico autovalore k k kj verrà denotato con
k ka kbj v v v , dove ka kbev v sono vettori reali;
c) se 1k k kj l’autovettore ad esso associato è dato da 1k k ka kbj v v v v ;
d) i vettori della base reciproca corrispondenti a 1 ek k v v , 1 ek k r r , sono dati da
k ka kbj r r r e 1k k ka kbj r r r r , rispettivamente, dove eka kbr r sono vettori reali.

34
Ciò premesso, si consideri la risposta libera nello stato data da:
01
( ) ( , ) i
nt
l i ii
t e
x r x v . (2.4.18)
I modi aperiodici sono dati da:
0( , ) iti ier x v .
Per determinare il generico modo pseudoperiodico, indicati con 1 ek k due autovalori
complessi e coniugati, il loro contributo al calcolo della risposta libera è dato da:
10 1 0 1( ) ( , ) ( , )k kt t
k k k k kt e e a r x v r x v ,
dove:
0 0 0 0( , ) ( , ) ( , ) ( , ) kjk ka kb ka kb kj j M e r x r r x r x r x ,
con:
2 20 0( , ) ( , )k ka kbM r x r x
0
0
( , )
( , )k b
kk a
rarctg
r
x
x
Ne consegue che:
( ) ( )( ) [ ( ) ( )]
= [cos( ) sin( ) ]
k k k k k
k
t j t j tk k ka kb ka kb
tk k k ka k k kb
t M e e j e j
C e t t
a v v v v
v v
avendo posto 2k kC M .
Se si ammette allora che, degli n autovalori della matrice A, siano reali e siano a coppiecomplessi e coniugati, si ottiene:
1 1
( ) [cos( ) sin( ) ]i kt tl i i k k k ka k k kb
i k
t R e C e t t
x v v v , (2.4.19)
È utile, a questo punto, interpretare geometricamente i modi appena presentati.
Il modo aperiodico 0( , ) iti ier x v evolve lungo una traiettoria rettilinea, adagiata
sull’autovettore iv , con legge oraria definita dalla funzione aperiodica itiR e , con
0( , )i iR r x . Tale traiettoria converge all’origine dello spazio di stato, degenera in un

35
punto o diverge, a seconda che risulti 0, 0i i e 0i , rispettivamente. La
traiettoria e la legge oraria sono illustrate nella Fig. 2.4.1.
a) traiettoria b) legge oraria
Fig. 2.4.1 Traiettoria e legge oraria relative al modo aperiodico.
Sovente, il modo aperiodico viene espresso in funzione della costante di tempo 1i iT . Il
caso di maggiore interesse è quello in cui 0i , in corrispondenza al quale 0iT e il modo
aperiodico converge a zero; esso converge a zero tanto più rapidamente quanto minore risulta
iT . Dopo un tempo pari a 4-5 volte iT , il modo si riduce a 1.8% e 0.67% del valore iniziale,
rispettivamente, e si considera estinto.
Il modo pseudoperiodico:
( )= [cos( ) sin( ) ]ktk k k k ka k k kbt C e t t a v v ,
evolve nel piano individuato dai vettori reali eka kbv v ; le componenti del modo lugo tali
vettori evolvono con leggi orarie date dalle funzioni pseudoperiodiche:
cos( ), sin( )k kt tk k k k k kC e t C e t
che assumono l’andamento illustrato nella Fig. 2.4.1. Si osserva che il modo converge a zero,diverge o oscilla in maniera persistene a seconda che k risulti minore di zero, maggiore dizero o zero, rispettivamente. Inoltre, è facile verificare che il modo converge a zero o divergetanto più rapidamente quanto più risulta elevato il modulo di k .
0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
t [s]
2k
0 0.1 0.2 0.3 0.4 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
t [s]
0k
0 0.5 1 1.5 2-10
-8
-6
-4
-2
0
2
4
6
8
10
t [s]
0.8k
Fig. 2.4.1 Leggi orarie relative al modo aperiodico 2 cos( )k tke t .
iv
0i 0i
0i
x 0
0i
0i 0i
iR
t

36
Le traiettorie del modo corrispondenti sono illustrate nella Fig. 2.4.2.
0k 0k 0k
Fig. 2.4.2 Traiettorie relative al modo pseudoperiodico
Analogamente al modo aperiodico, il modo pseudoperiodico viene di solito espresso intermini della pulsazione naturale non smorzata nk e del coefficiente di smorzamento k ,
dati da:
2 2nk k k k , (2.4.20)
kk
nk
. (2.4.21)
In termini ti questi ultimi parametri, il modo pseudoperiodico si esprime come segue:
2 2( )= [cos( 1 ) sin( 1 ) ]k nkk k
tk k nk k ka nk k kbt C e t t a v v (2.4.22)
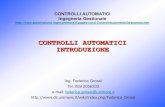
In Fig. 2.4.3 son illustrati i parametri ,k k , ek nk assumendo che
0 e (0,1)k k . A parità di nk e al crescere di k si nota una riduzione di k e un
incremento di k cui corrisponde una maggiore rapidità con cui il modo tende a zero e una
minore frequenza dell’oscillazione smorzata. In Fig. 2.4.4 sono illustrati gli andamenti dellacomponente del modo lungo kbv per k pari a 0.1 e 0.7.
vkb
k
Fig. 2.4.3
jkk
nk
sin( )k k

37
0 2 4 6 8 10-1
-0.5
0
0.5
1
t [s]
ampi
ezza
0.10.7
Fig. 2.4.4 Andamento della funzione 2sin( 1 )k nkk
tnke t per k pari a 0.1 e 0.7.
2.4.4 Autovalori di A multipli
Il caso di autovalori multipli sarà trattato successivamente, nell’ambito dello studio deisistemi LTI nel dominio di s.
2.5 Risposte canoniche
Le risposta impulsiva sono particolari risposte forzate nell’uscita corrispondenti aparticolari ingressi, detti ingressi canonici, la cui conoscenza, unitamente a quella di ungenerico ingresso, consente di determinare la risposta forzata nell’uscita corrispondenteall’ingresso stesso.
Considerando per semplicità sistemi unidimensionali, ossia a un solo ingresso e una solauscita, l’espressione della risposta forzata nell’uscita è data da (cfr. (2.1.4)):
0( ) = ( ) ( )
t
fy t w t u d , (2.5.1)
dove ( )w t denota la risposta impulsiva che, come detto, è la risposta forzata nell’uscitacorrispondente a un ingresso costituito da un impulso di Dirac. La (2.5.1) mostra che larisposta impulsiva è una risposta canonica poiché permette di calcolare la risposta forzatanell’uscita corrispondente all’ingresso ( )u t .
Si può dimostrare che i segnali ottenuti integrando ripetutamente l’impulso di Dirac, datida:
( 1) 1( ) = ( )k
kt
t tk ! , (2.5.2)

38
sono segnali canonici. Questi segnali, a differenza dell’impulso, sono realizzabili fisicamenteo approssimabili con segnali reali.
A titolo di esempio verrà considerata la risposta indiciale.
2.5.1 Risposta indiciale
La risposta indiciale è la risposta forzata nell’uscita corrispondente a un gradino unitario ilcui andamento è illustrato in fig. 2.5.1. Tale risposta, denotata con 1( )w t , è data da (cfr.
(2.5.1)):
1 10 0( ) = ( ) ( ) ( )
t tw t w t d w d , (2.5.3)
poiché 1( ) = 1 per 0 e0
10(t ) ( )w d
è un infinitesimo rispetto a0
( )tw d .
Fig. 2.5.1 Segnale a gradino unitario localizzato nell’origine.
La (2.5.3) mette in luce che la risposta impulsiva è la derivata della risposta indiciale. Neconsegue che la (2.5.1) può essere scritta come segue:
110 0
( ) ( )( ) = ( ) ( )
( )
t t
fd w t d u
y t u d w t dd t d
, (2.5.4)
che mostra che è una risposta canonica poiché la sua conoscenza e quella dell’ingressopermettono di determinare univocamente la risposta forzata nell’uscita corrispondenteall’ingresso. La derivata dell’ingresso che figura nella (2.5.4) va considerata “nel senso delledistribuzioni”, il che implica che eventuali discontinuità nell’ingresso devono essereconsiderate esplicitamente.
Esempio 2.5.1
Si consideri la funzione d’ingresso mostrata in fig. 2.5.2, avente una discontinuità nell’origine. Inaccordo alla fig. 2.5.2, essa si può scomporre come segue:
Fig. 2.5.2
( )u t 1(0 ) ( )u t 1( )u t
t
1( )t

39
1 1( ) = (0 ) ( ) + ( )u t u t u t .
La sua derivata è data da:
1( ) ( )= (0 ) ( ) +
d u t d u tu t
d t d t .
Ne consegue che la risposta forzata nell’uscita risulta:
11 10 0
( ) ( )( ) ( ) ( ) (0 ) ( ) +
t t
fd u d u t
y t w t d w t u t dd d t
=
+1
1 10
( )(0 ) ( ) + ( )
t d u tu w t w t d
d t
.
2.6 Linearizzazione
Si consideri il seguente modello non lineare e tempo-invariante:
( ) ( ( ), ( ))t t tx f x u , (2.6.1)( ) ( ( ), ( ))t t ty g x u . (2.6.2)
Nell’ipotesi che esista il punto di equilibrio x corrispondente all’ingresso costante u , cosìdefinito:
( , )0 f x u , (2.6.3)
e che si desideri studiare il comportamento del sistema nell’intorno del succitato punto diequilibrio, è possibile linearizzare il modello non lineare (2.6.1)-(2.6.2) nell’intorno di esso eapplicare le metodologie di studio per sistemi lineari allo studio del sistema linearizzato.
Il sistema linearizzato corrispondente al sistema non lineare (2.6.1)-(2.6.2), si ottiene comesegue. Si assuma:
( ) ( )t t x x x , (2.6.4)( ) ( )t t u u u , (2.6.5)( ) ( )t t y y y . (2.6.6)
dove ( , )y g x u , e ( )t x , ( )t u e ( )t y sono piccole variazioni dello stato, dell’ingresso edell’uscita nell’intorno di un punto di funzionamento del sistema caratterizzato da ( )t x x ,
( )t u u e ( )t y y .
Dalla (2.6.1), considerando la (2.6.4) e sviluppando le funzioni ( , )f x u e ( , )g x u in seriedi Taylor, si ha:

40
( ) ( , ) ( , )ft O
x x x xu u u u
f fx f x u x x u u x u
x u , (2.6.7)
( ) ( , ) ( , )gt O
x x x xu u u u
g gy y g x u x x u u x u
x u, (2.6.8)
dove ( , )fO x u e ( , )gO x u sono infinitesimi di ordine superiore rispetto a x e u .
Trascurando tali infinitesimi, tenendo conto della (2.6.3) e ponendo:
( , )
x xu u
fA x u
x, ( , )
x xu u
fB x u
u, ( , )
x xu u
gC x u x x
x, ( , )
x xu u
gD x u
u,
il modello linearizzato risultante è dato da:
( ) ( , ) ( , )t x A x u x B x u u , (2.6.9)( ) ( , ) ( , )t y C x u x D x u u . (2.6.10)

41
APPENDICE A
Integrale di convoluzione
Siano 1 2( ) e ( )f f due generiche funzioni del tempo definite su (, +). Si definisceconvoluzione delle due funzioni, o integrale di convoluzione, la funzione del tempo data da:
1 2 1 2 ( ) ( )f f f f t d
(A.1)
Se l’integrale esiste, esso si calcola moltiplicando la funzione 1f per la funzione 2f traslata
di t e ribaltata di rispetto all’asse verticale (cfr. Fig. A.1). L’integrale di convoluzione godedelle seguenti proprietà:
1 2 1 2 2 1 1 2( ) ( ) ( ) ( )f f f f t d f f f t f d
, (A.2)
( ) ( )1 1 2 2 1 22 1( ) [ ( )] [ ( )] ( )
( )
k kk k
k k
d df f f f t d f f f f t d
d t d
(A.3)
Se le due funzioni 1f e 2f sono nulle per tempi negativi, si ha:
1 2 1 2 1 20 ( ) ( ) ( ) ( )
tf f f f t d f f t d
(A.4)
Impulso di Dirac
La definizione rigorosa dell’impulso di Dirac è data nell’ambito delle funzionigeneralizzate. In questa sede conviene definire l’impulso di Dirac di area unitaria elocalizzato all’istante 0t come quell’ente matematico tale che:
0 0( ) 0t t t t , (A.5)
0( ) 1t t dt
. (A.6)
L’impulso di Dirac si rappresenta come indicato nella Fig. A.2.
Fig. A.2 Rappresentazione grafica di 0( )t t .t0

42
Esso non è un segnale fisicamente realizzabile in laboratorio; infatti, ha durata infinitesimae ampiezza infinitamente grande. Un segnale che può essere generato in laboratorio inmaniera approssimata è l’impulso rettangolare di area unitaria, 0( , )t t , di Fig. A.3, dato
da:
1 0 1 00
( ) ( ( ))( , )
t t t tt t
. (A.7)
Fig. A.3 Impulso rettangolare 0( , )t t .
Com’è facile verificare dall’esame della Fig. A.3, si ha:
0 00
lim ( , ) ( )t t t t
. (A.8)
Poiché il limite a primo membro della A.8 è il limite del rapporto incrementale della funzionea gradino localizzata all’istante 0t (cfr. A.7) al tendere dell’incremento a zero, risulta:
1 0 1 00 1 0 0
0 0
( ) ( ( ))lim ( , ) lim ( ) ( )
t t t t dt t t t t t
dt
, (A.9)
la quale mostra che l’impulso è la derivata della funzione a gradino. Nell’ambito dell’analisiclassica tale derivata è definita a pari a zero 0t t . Grazie alla definizione dell’impulso diDirac la succitata derivata esiste t e coincide con l’impulso stesso. Naturalmente, si ha:
1 0 0( ) ( )t
t t t d . (A.10)
Fig. A.4 Limite dell’impulso rettangolare di Fig. 3 al tendere di a zero.t0 t0+
1/
t0 t0+
t0 t0+
1/
0t
1 01
( )t t
1 01
( ( ))t t
t
t
t0( , )t t

43
Generalizzando la (A.9), data la funzione discontinua di Fig. A.5 a), decomponendola nellasomma delle due funzioni di Fig. A.5 b) e c), si ha:
01 0 1 0( ) ( ) [ ( ) ( )] ( )f t f t f t f t t t ,
(1)(1)0 0 01( ) ( ) [ ( ) ( )] ( )f t f t f t f t t t .
Fig. A.5
Integrando la (A.10), si ha:
2 0 1 0 0( ) ( ) ( )t t t
t t t d t d , (A.11)
che è la funzione a rampa lineare localizzata all’istante 0t ; integrando la (A.11) si ottiene una
funzione la rampa parabolica:
3 0 1 0 0( ) ( ) ( )t t t t t
t t t d t d , (A.12)
Le funzioni a gradino, a rampa lineare e a rampa parabolica sono illustrate nella Fig. A.6,assumendo 0 0t .
Adesso, data una funzione ( )f t continua all’istante 0t , per la (A.5), si ha:
0 0 0( ) ( ) ( ) ( )f t t t f t t t ,
da cui, per la (A.6), si ottiene:
( )f t
0t
t
t
t1( )f t
0 0 1 0[ ( ) ( )] ( )f t f t t t

44
0 0 0 0 0 0( ) ( ) ( ) ( ) ( ) ( ) ( )f t t t dt f t t t dt f t t t dt f t
, (A.13)
che esprime la proprietà campionatrice dell’impulso. Tale proprietà vale anche se i limiti diintegrazione sono finiti, purché contengano l’istante 0t . Inoltre, essa vale anche per la
convoluzione di una funzione ( )f t continua in t e della funzione generalizzata ( )t . Infatti,si ha:
( ) ( ) ( ) ( ) ( ) ( ) ( )f f t d f t d f t d f t
(A.14)
a) b) c)
Fig. A.6 a) segnale a gradino; b) segnale a rampa lineare; c) segnale a rampa parabolica.
Oltre alla funzione a gradino a gradino, anche la funzione di Gauss data da:
20
0 2
1 ( )( , ) exp
22
t tt t
, (A.15)
soddisfa la (A.8) e può essere utilizzata per definire l’impulso di Dirac (cfr. Fig. A.7). Ilvantaggio di tale funzione è connesso al fatto che a partire dalle sue derivate e facendotendere a zero è possibile definire le derivete successive dell’impulso, come illustrato nellaFig. A.8.
Fig. A.7 Funzione di Gauss al diminuire di .

45
fig. 22 k (t t0) = k0
k
) t(td
d
(t t0).
a)IMPULSO
b)DOPPIETTA
c)TRIPLETTA
a) b)
Fig. A.8 a) funzione d Gauss e sue derivate prima e seconda; b) impulso e sue derivateprima e seconda.
Matrice esponenziale
Com’è noto, data una funzione esponenziale te con scalare, si ha:
2 2 3 3
0
1 1 1 11
2! 3! ! !t k k k k
k
e t t t t tk k
. (A.16)
In modo analogo, data una matrice A n n ad elementi costanti, si definisce matriceesponenziale la seguente serie:
2 2 3 3
0
1 1 1 1
2! 3! ! !t k k k k
k
e t t t t tk k
A I A A A A A , (A.17)
che risulta convergente per tutti i t finiti. La matrice esponenziale soddisfa le proprietà:
1. det( ) 0,te t A ;
2. 1 2 1 2(1 2) , ,t t t te e e t t A A A ;
3. 1( )t te e A A ;
4. 2 3 2 11 1
2! ( 1)!t k k t td
e t t t e edt k
A A AA A A A A A

46
5. ( )t t te e e A B A B , se AB BA .