Controlli Automatici LA - Automazione LA... · Controlli Automatici LA Analisi dei sistemi dinamici...
64
Controlli Automatici LA Analisi dei sistemi dinamici lineari Funzione di trasferimento stabilita dei sistemi lineari proprietà generali della risposta al gradino Prof. Carlo Rossi DEIS-Università di Bologna Tel. 051 2093020 Email: [email protected] URL: www-lar.deis.unibo.it/~crossi
Transcript of Controlli Automatici LA - Automazione LA... · Controlli Automatici LA Analisi dei sistemi dinamici...

Controlli Automatici LA Analisi dei sistemi dinamici lineari
Funzione di trasferimento stabilita dei sistemi lineari
proprietà generali della risposta al gradino
Prof. Carlo Rossi DEIS-Università di Bologna
Tel. 051 2093020 Email: [email protected]
URL: www-lar.deis.unibo.it/~crossi

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 2
Indice 1. Funzione di trasferimento 2. Antitrasformata di Laplace 3. Stabilità dei sistemi lineari 4. Proprietà generali della risposta al gradino unitario 5. Riferimenti bibliografici

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 3
Trasformata di Laplace Ai fini del controllo è interessante sapere come il
sistema risponde nel tempo a sollecitazioni esterne non volendo ricorrere a costosi e talora pericolosi
esperimenti si può basare l'indagine sull'uso di un modello bisogna risolvere le equazioni differenziali che lo compongono
cosa complicata
Metodo alternativo Uso della Trasformata di Laplace
la trasformata di Laplace consente di trasformare una equazione differenziale in una corrispondente equazione algebrica detta funzione di trasferimento (f.d.t.) l'analisi della f.d.t. consente di ricavare le stesse informazioni
dell'analisi diretta della equazione differenziale informazioni importanti sulla risposta del sistema a sollecitazioni
esterne si possono ricavare dallo studio delle radici di polinomi associati alla f.d.t. operazione assai più facile

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 4
Trasformata di Laplace Trasformata di Laplace di equazioni integro
/differenziali - un esempio proprietà utilizzate
linearità si trasformano i singoli addendi
teoremi della trasformata della derivata e dell'integrale
se l'ingresso è applicato all'istante t=0 si separano le variabili e si raccolgono i termini comuni
condizione iniziale

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 5
Trasformata di Laplace Trasformata di Laplace di equazioni integro
/differenziali - un esempio continua
risolvendo per Y(s) si ha
la funzione
è detta Funzione di Trasferimento (f.d.t.)
trasformata della risposta libera
trasformata della risposta forzata

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 6
Trasformata di Laplace Trasformata di Laplace di equazioni integro
/differenziali - un esempio se il sistema è inizialmente in quiete ⇒ y(0) = 0
equazione algebrica
metodo alternativo per lo studio di equazioni differenziali lineari
equivalenti dal punto di vista
informativo

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 7
Funzione di Trasferimento Da equazione differenziale a Funzione di
trasferimento y(t) è l'uscita; u(t) è l'ingresso ai coefficienti; an≠0 n = ordine dell'equazione differenziale n ≥ m ⇒ fisica realizzabilità
risposta forzata risposta libera
equazione algebrica
condizioni iniziali

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 8
Funzione di trasferimento Dalla Rappresentazione di stato alla Funzione di
trasferimento
qualunque sia il punto di partenza equazione differenziale di ordine n sistema di n equazioni di primo grado (forma di stato)
la funzione di Trasferimento (f.d.t.) è un modello equivalete del sistema dinamico a meno di possibili cancellazioni tra radici del numeratore (zeri) e radici del denominatore (poli) della f.d.t.
se ci sono cancellazioni il contenuto informativo della f.d.t. è inferiore a quello delle altre rappresentazioni differenziali non cattura dinamiche che non hanno effetto sulla relazione
ingresso uscita
x t( )= Ax t( )+ Bu t( )y t( )= Cx t( )+ Du t( )
⎧⎨⎪⎪⎪
⎩⎪⎪⎪
Y s( )= G s( )U s( )
G s( )= CAdj sI− A( )det sI− A( )
B + D
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 9
Funzione di trasferimento Dalla rappresentazione di Stato alla funzione di
trasferimento (f.d.t.) sistemi lineari stazionari SISO
poiché le variabili di stato, ingresso, uscita ( x(t), u(t), y(t)) sono segnali corrispondenti a grandezze fisiche si possono definire le loro trasformate di Laplace
x t( )= Ax t( )+ Bu t( )y t( )= Cx t( )+ Du t( )
sX s( )− x 0( )= AX s( )+ BU s( )Y s( )= CX s( )+ DU s( )
utilizzando le proprietà di linearità della trasformata di Laplace e ricordando che
L
dx t( )dt
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥= sX s( )− x0
X s( ) := L x t( )⎡⎣⎢⎤⎦⎥
Y s( ) := L y t( )⎡⎣⎢⎤⎦⎥
U s( ) := L u t( )⎡⎣⎢⎤⎦⎥
trasformate dei segnali
Il modello in forma di stato diventa

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 10
Funzione di trasferimento Dalla rappresentazione di Stato alla funzione di
trasferimento (f.d.t.)
sI− A( ) X s( )= BU s( )+ x 0( )Y s( )= CX s( )+ DU s( )
⎧⎨⎪⎪⎪
⎩⎪⎪⎪
X s( )= sI− A( )−1BU s( )+ sI− A( )−1
x 0( )Y s( )= C sI− A( )−1
B + D⎡⎣⎢
⎤⎦⎥U s( )+ C sI− A( )−1
x 0( )
⎧
⎨
⎪⎪⎪⎪
⎩⎪⎪⎪⎪
stato
uscita
G s( ) := C sI− A( )−1B + D
sX s( )− x 0( )= AX s( )+ BU s( )Y s( )= CX s( )+ DU s( )
⎧⎨⎪⎪⎪
⎩⎪⎪⎪
evoluzione forzata evoluzione libera
funzione di trasferimento
Y s( )= G s( )U s( )+ C sI− A( )−1x 0( )
trasformata dell'uscita in funzione della trasformata dell'ingresso e dello stato iniziale

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 11
Funzione di trasferimento Esempio
Sistema SISO del 2° ordine con condizione iniziale nulla (x(0) = 0)
A =
a11 a12
a21 a22
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟ B =
b1
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟ C = c1 c2( )
G s( ) := C sI− A( )−1B + D
sI− A( )=
s−a11 −a12
−a21 s−a22
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
1 solo ingresso 1 sola uscita 1 solo ingresso 1 sola uscita
sI− A( )−1
=
s−a22 a12
a21 s−a11
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
s2− a11 + a22( )s + a22a11−a12a21
determinante di A
aggiunta di A

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 12
Funzione di trasferimento Esempio
funzione di trasferimento
A =
a11 a12
a21 a22
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟ B =
b1
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
G s( ) := C sI− A( )−1B + D
sI− A( )−1=
s−a22
s2− a11 + a22( )s−a12a21
a12
s2− a11 + a22( )s−a12a21
a21
s2− a11 + a22( )s−a12a21
s−a11
s2− a11 + a22( )s−a12a21
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
sI− A( )−1=
p11n−1
detn
p12n−1
detn
p21n−1
detn
p22n−1
detn
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
piin-1 → polinomio generico di grado n-1
detn → determinante di (sI-A) di grado n n → dimensione del vettore di stato (matrice A)
In generale

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 13
Funzione di trasferimento Esempio
funzione di trasferimento – caso con D = 0
A =
a11 a12
a21 a22
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟ B =
b1
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
sI− A( )−1=
p11n−1
detn
p12n−1
detn
p21n−1
detn
p22n−1
detn
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
C sI− A( )−1B = c1 c2( )
p11n−1
detn
p12n−1
detn
p21n−1
detn
p22n−1
detn
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
b1
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
C sI− A( )−1
B =b1 c1 p11
n−1 + c2 p21n−1( )+ b2 c1 p12
n−1 + c2 p22n−1( )
detn
combinazione lineare di polinomi di grado n-1 grado n-1 grado n-1

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 14
Funzione di trasferimento Esempio
funzione di trasferimento – caso con D ≠ 0
A =
a11 a12
a21 a22
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟ B =
b1
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
G s( ) := C sI− A( )−1B + D
G s( ) := C sI− A( )−1
B + D =b1 c1 p11
n−1 + c2 p21n−1( )+ b2 c1 p12
n−1 + c2 p22n−1( )
detn + d
G s( )=
b1 c1 p11n−1 + c2 p21
n−1( )+ b2 c1 p12n−1 + c2 p22
n−1( )+ d detn
detn
grado n
In generale: la G(s) ha denominatore di grado n (dimensione del vettore di stato)
se D = 0 la G(s) ha numeratore con grado ≤ n-1 se D ≠ 0 la G(s) ha numeratore con grado = n

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 15
Funzione di trasferimento Struttura della f.d.t.
matrice i cui termini sono funzioni razionali in s numeratore di grado < n (matrice aggiunta) denominatore di grado n (determinante) (n=deg(A))
grado = n grado = n
grado < n grado = n
combinazione lineare dei termini di (sI-A)-1

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 16
Funzione di trasferimento la f.d.t. rappresenta il legame tra la trasformata di Laplace
dell'ingresso (la causa forzante) e quella dell'uscita (l'effetto)
la f.d.t. è una funzione razionale fratta (rapporto di polinomi)
le proprietà della risposta dipendono essenzialmente dalle radici del polinomio a denominatore poli del sistema
anche le radici del polinomio a numeratore influenzano la risposta zeri del sistema
la maggior parte dei sistemi fisici ha funzione di trasferimento senza zeri, ma molto spesso nel progetto del regolatore ci farà comodo inserire degli zeri
L'influenza degli zeri sulla risposta andrà quindi attentamente valutata

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 17
Funzione di trasferimento Funzione di trasferimento e rappresentazione a
blocchi
G(s) X(s) Y(s)
G(s) si dice propria se m≤n G(s) si dice strettamente propria se m<n

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 18
Rappresentazioni fattorizzate e parametri della f.d.t. i polinomi a numeratore e denominatore possono sempre
essere scritti in forma fattorizzata prodotto delle radici
Funzione di trasferimento
radici nulle
radici reali
radici complesse coniugate
Im(s)
Re(s)

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 19
Rappresentazioni fattorizzate e parametri della f.d.t. passaggio dalla formulazione generica a quella standard
per polinomi del 2° ordine la formulazione standard dei termini di 2° ordine delle f.d.t. è
comoda perchè, come vedremo, i coefficienti δ e ωn hanno un preciso significato fisico
Funzione di trasferimento
si eguagliano i coefficienti dei termini
corrispondenti
si risolve il sistema
forma generica
forma standard nei controlli

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 20
relazione tra la posizione dei poli dei termini di 2° grado e le pulsazioni naturali (αni , ωni) ed i coefficienti di smorzamento (ςi , δi)
Funzione di trasferimento
2 reali coincidenti
G s( ) = ρ
sg
s + zk( ) s2 + 2ζ iα nis +α ni2( )i∏k∏
s + pk( ) s2 + 2δ iω nis +ω ni2( )i∏k∏
δi = 0 ωni
−ωni
δi < 0
δi =1 0 < δi <1
−δiωni
ωni 1−δi2
acos δi( )
δi =−1

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 21
Funzione di trasferimento Rappresentazioni fattorizzate e parametri della f.d.t.
G s( )=
ρsg
s + zk( ) s2 + 2ζiαnis +αn12( )i∏k∏
s + pk( ) s2 + 2δiωnis +ωni2( )i∏k∏
G s( )=
µsg
1+Tks( ) 1+ 2ζis / αni + s2 / αn12( )i∏k∏
1+ τks( ) 1+ 2δis / ωni + s2 / ωni2( )i∏k∏
alternative
I polinomi elementari
hanno i termini noti
unitari

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 22
Funzione di trasferimento Rappresentazione e parametri della f.d.t.
esempio
f.d.t. in forma fattorizzata
f.d.t. in forma fattorizzata normalizzata
radici
i termini noti dei fattori sono unitari

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 23
Funzione di trasferimento Rappresentazione non fattorizzata della f.d.t.
m ≤ n
D s( )= det sI− A( )i poli (radici del denominatore) della f.d.t. coincidono con gli autovalori della matrice di stato A a meno di eventuali cancellazioni con zeri (radici del numeratore) dello stesso valore
Se non ci sono cancellazioni poli/zeri, la rappresentazione di stato e la funzione di trasferimento hanno identico contenuto informativo.
In presenza di cancellazioni, alcune informazioni che si riferiscono al comportamento interno del sistema e che non hanno effetto sulla relazione ingresso/uscita, vanno perse nella f.d.t..

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 24
Funzione di trasferimento Calcolo dell'andamento temporale dell'uscita
utilizzando la trasformata di Laplace a partire dall'ingresso e dallo stato iniziale
per la proprietà di linearità della antitrasformata di Laplace le antitrasformate dei due termini (la risposta libera e quella forzata) possono essere calcolate separatamente
se stiamo considerando il modello di un sistema fisico U(s) è certamente una funzione razionale fratta
trasformata di una funzione reale del tempo il prodotto di due funzioni razionali fratte (G(s) e U(s)) è
una funzione razionale fratta per il calcolo di y(t) occorre antitrasformare due funzioni razionali
fratte, corrispondenti ciascuna al rapporto di due polinomi
funzioni razionali fratte con lo stesso denominatore

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 25
Antitrasformata di Laplace Formulazioni alternative della f.d.t.
se m < n si può ottenere una ulteriore formulazione detta sviluppo in fratti semplici o di Heaviside
semplifica enormemente l'antitrasformazione se m = n, dividendo i due polinomi di pari grado si ha
forma fattorizzata
G s( )= Ks + zi( )
i=1
m
∏
s + pi( )i=1
n
∏
forma polinomiale
sviluppo in fratti semplici o di Heaviside
G s( )=Ki
s + pii=1
n
∑
con grado di N'(s) = n-1

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 26
Antitrasformata di Laplace Osservazioni
l'andamento esponenziale è governato dalla posizione delle radici del polinomio a denominatore poli della f.d.t. (autovalori di A) per la risposta libera poli della f.d.t. (autovalori di A) + radici del denominatore di U(s)
per la risposta forzata gli zeri della f.d.t. e le condizioni iniziali (in generale il
numeratore della funziona razionale fratta) non influenzano gli andamenti degli esponenziali ma solo i coefficienti della combinazione lineare (residui)

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 27
Antitrasformata di Laplace
K1 =
5 −1( )+ 3
−1+ 2( ) −1+ 3( )=−1
Ki = s− pi( )N s( )D s( )
s= pi
K2 =
5 −2( )+ 3−2+1( ) −2+ 3( )
= 7
K3 =
5 −3( )+ 3−3+1( ) −3+ 2( )
=−6
Esempio
g t( )=−e−t + 7e−2t −6e−3t

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 28
Antitrasformata di Laplace Calcolo della risposta in presenza dell'ingresso
Y s( ) = N1i s( )
s − pGi( )rii=1
n1
∏ ∗N2i s( )
s − pUi( )ri+
i=n1+1
n2
∏N3i s( )
s − pGi( )rii=1
n1
∏Dinamiche
proprie Contributo ingresso
Condizioni iniziali
Governato dalle radici del denominatore
di U(s)
Governate dai poli della f.d.t.
Modi del sistema: dinamiche indipendenti dall'ingresso
G(s) U(s) Y(s)
funzioni razionali fratte con lo stesso denominatore

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 29
Antitrasformata di Laplace La risposta forzata di un sistema lineare si ottiene
combinando linearmente le risposte forzate dei suoi sottosistemi elementari del 1° e del 2° ordine
Comando uscita sistema
Importanza dello studio delle risposte dei sistemi elementari
Comando uscita
Sottosistema 1
Σ Sottosistema 2
Sottosistema 3
Sottosistema 4
………………...

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 30
Antitrasformata di Laplace Deduzione della risposta y(t) al gradino unitario u(t)
di un sistema dinamico lineare stazionario
Y s( )= ρs + zi( )
i=1
m
∏
s + pi( )i=1
n
∏
1s
Y s( ) = ρKi
s + pii=1
n
∑ +Kn+1
s⎛
⎝⎜⎞
⎠⎟
y t( )= ρ Kn+1 + Kie
−pit
i=0
n
∑⎛
⎝⎜⎜⎜
⎞
⎠⎟⎟⎟⎟
trasformata del gradino unitario
costante modello differenziale
f.d.t. fattorizzata f.d.t. in fratti semplici
risposta
ai
d i y t( )dti
i=0
n
∑ = bi
d ix t( )dti
i=0
m
∑

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 31
Antitrasformata di Laplace Effetto dell'ingresso nella risposta forzata
nello sviluppo in fratti semplici l'ingresso contribuisce con termini aggiuntivi (detti modi dell'ingresso) che si aggiungono ai modi naturali del sistema
ci sono casi particolari, ma significativi, in cui la presenza dell'ingresso non si manifesta semplicemente con termini additivi ma modifica le proprietà strutturali della risposta
sovra-eccitazione della risonanza non produce effetti sull'uscita
proprietà bloccanti degli zeri

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 32
Antitrasformata di Laplace Effetto dell'ingresso nella risposta forzata
caso di sistema risonante coppia di poli immaginari puri
Re
Im
Modi propri esponenziale decrescente
sinusoidale persistente
2rad/s
impulso
U(s)=1
stiamo considerando un sistema risonante ⇒ ad es. massa/molla senza attrito
se eccitato, continua ad oscillare all'infinito
ωs = 2rad/s

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 33
Antitrasformata di Laplace Effetto dell'ingresso nella risposta forzata
caso di sistema risonante eccitazione della risonanza
Re
Im
1° caso: ωi ≠ 2rad/s
Modi propri Modo forzato
seno pulsazione ωi = 10
10rad/s
2rad/s
esponenziale decrescente
sinusoidali persistenti
modo proprio
modo forzato

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 34
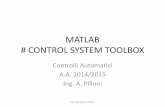
Antitrasformata di Laplace Effetto dell'ingresso nella risposta forzata
caso di sistema risonante sovra-eccitazione della risonanza
Re
Im
2° caso: ωi = 2rad/s
y t( ) = 25L−1 s +1
s2 + 22( )2s + .3( )
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
y t( ) = k0e−.3t + k1 sin 2t +ϕ1( ) + k2t sin 2t +ϕ2( )
Modi propri Modo forzato
seno pulsazione ωi = 2
esponenziale decrescente
sinusoidale persistente
sinusoidale crescente
A fronte di un ingresso limitato l'uscita è illimitata

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 35
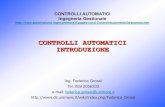
Antitrasformata di Laplace Proprietà bloccante degli zeri
caso di sistema con una coppia di zeri immaginari puri applichiamo in ingresso una sinusoide di pulsazione ωi
Re
Im
1° caso: ωi ≠ 2 rad/s
Modi propri Modo forzato sinusoidale persistente

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 36
Antitrasformata di Laplace Proprietà bloccante degli zeri
caso di sistema con una coppia di zeri immaginari puri applichiamo in ingresso una sinusoide di pulsazione ωi
Re
Im
2° caso: ωi = 2 rad/s
Modi propri I modi forzanti sono coincidenti con gli zeri della f.d.t.. ⇒ non hanno effetto sull'uscita

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 37
Stabilità dei sistemi lineari Stabilità interna
effetto che perturbazioni sullo stato iniziale hanno sulla traiettoria dello stato
Stabilità esterna effetto che perturbazioni sull’ingresso hanno sulla traiettoria di
uscita
G(s)

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 38
Stabilità dei sistemi lineari Stabilità interna
Data un certa traiettoria “nominale” (stato iniziale e ingresso), una perturbazione dello stato iniziale può produrre una traiettoria perturbata che rimane sempre prossima a quella
nominale stabilità semplice
una traiettoria perturbata che rimane sempre prossima a quella nominale e tende asintoticamente ad essa stabilità asintotica
una traiettoria perturbata che diverge da quella nominale instabilità
The image cannot be displayed. Your
The image cannot be displayed. Your
+
-
The image cannot be displayed. Your

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 39
Stabilità dei sistemi lineari Le definizioni di stabilità enunciate per sistemi generici,
possono essere specializzate, per i sistemi lineari, al caso in cui l'ingresso è identicamente nullo e la traiettoria di riferimento è il punto di equilibrio x = 0 se il sistema ha determinate proprietà di stabilità in assenza di
ingresso e per perturbazioni rispetto allo stato iniziale nullo mantiene le stesse proprietà con ingresso e stato iniziale
diversi da zero
M s( )= sI− A( )−1
traiettoria nominale
x t( )= L−1 M s( )BU s( )( )+L−1 M s( )x 0( )( )+L−1 M s( )δx 0( )( )traiettoria perturbata
x t( )− x t( ) = L−1 M s( )δx 0( )( )
Lo stato iniziale nominale x(0) non entra nella determinazione dell'errore
Infatti sia

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 40
Stabilità dei sistemi lineari Stabilità interna
M s( )= sI− A( )−1
=adj sI− A( )det sI− A( )
x t( )− x t( ) = L−1 M s( )δx 0( )( )la norma dell'errore è una combinazione lineare di segnali con decadimento esponenziale governato dalla parte reale degli autovalori della matrice di stato
Il sistema è internamente:
• asintoticamente stabile se tutti gli autovalori di A hanno parte reale negativa
• semplicemente stabile se tutti gli autovalori di A hanno parte reale non positiva, ed eventuali autovalori a parte reale nulla sono semplici
• instabile se almeno un autovalore di A ha parte reale positiva, o almeno un autovalore a parte reale nulla è multiplo

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 41
Stabilità dei sistemi lineari Osservazione 1
l'asintotica stabilità interna implica: la stabilità asintotica della traiettoria di uscita (per una
perturbazione dello stato iniziale) le traiettorie di uscita sono una combinazione lineare di quelle
dello stato la limitatezza delle traiettorie dello stato/uscita a fronte di ingressi
limitati Stabilità BIBS (bounded-input bounded-state) Stabilità BIBO (bounded-input bounded-output)
converge a zero Stato o uscita
Sistema int. stabile

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 42
Stabilità dei sistemi lineari Osservazione 1
verifica
U s( )=
* s( )D s( )
* s( )det sI− A)( )
* s( )
det sI− A)( )
* s( )det sI− A)( )
* s( )
det sI− A)( )
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
* s( )D s( )⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
* s( )D s( )
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
=
* s( )det sI− A)D s( )( )
* s( )det sI− A)D s( )( )
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
qualunque numeratore
l'antirasformata di ciascun elemento del vettore di stato è la somma di termini elementari associati agli autovettori di A (esponenzialmente stabili)
ed alle radici di D(s) limitate

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 43
Stabilità dei sistemi lineari Osservazione 2
se il sistema è "solo" internamente semplicemente stabile la stabilità BIBS (BIBO) non è più garantita ingressi limitati ma "risonanti con gli autovalori di A a parte reale
nulla genera traiettorie instabili solo i sistemi dinamici lineari possiedono la proprietà che
asintotica stabilità del sistema in assenza di ingresso implica la stabilità BIBS
per i sistemi non lineari non è sempre vero esempio
x =−x + xu u≡→ x =−x
u≡ 2→ x = x
⎧⎨⎪⎪
⎩⎪⎪
asintoticamente stabile
instabile

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 44
Stabilità dei sistemi lineari Stabilità esterna
si cerca di caratterizzare le proprietà Ingresso-Uscita di un sistema a fronte di una perturbazione del segnale di ingresso (proprietà della funzione di trasferimento)
data una traiettoria nominale del sistema (ovvero un certo stato iniziale e una certa funzione di ingresso) l’obiettivo è caratterizzare l’effetto di una perturbazione impulsiva sul segnale di ingresso.
The image cannot be displayed. Your
The image cannot be displayed. Your computer may not have enough memory to open
The image cannot be displayed. Your
+
+
- The image cannot be displayed. Your computer may not have enough memory to open
The image cannot be displayed. Your +

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 45
Stabilità dei sistemi lineari Stabilità esterna
per sistemi lineari si può considerare il punto di equilibrio x(0) = 0 e u ≡ 0
la stabilità esterna si può quindi verificare analizzando la risposta ad un impulso
un sistema dinamico lineare con f.d.t. G(s) è esternamente asintoticamente stabile
se tutti i poli di G(s) hanno parte reale negativa semplicemente stabile
se tutti i poli di G(s) hanno parte reale non positiva ed eventuali poli a parte reale nulla sono semplici
instabile se esiste almeno un polo di G(s) a parte reale positiva o a parte
reale nulla ma multiplo
L δu t( )( )δ y t( )= L−1 G s( )δ( )= L−1 G s( )( )δstabilità esterna

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 46
Stabilità dei sistemi lineari Stabilità esterna/stabilità interna
i poli di G(s) sono un sottoinsieme degli autovalori di A in G(s) ci possono essere cancellazioni polo/zero
la stabilità interna (semplice o asintotica) implica la stabilità esterna (semplice o asintotica) il contrario può non esser vero se in G(s) ci sono state
cancellazioni di poli instabili in caso di cancellazione di poli instabili
nel sistema ci sono moti "interni" instabili che non sono visibili dall'"esterno" (uscita)

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 47
Stabilità dei sistemi lineari Stabilità esterna/stabilità interna
Stabilità BIBS Stabilità BIBO
Stabilità interna
Traiettorie di stato
Stabilità esterna
Traiettorie di uscita
Perturbazioni limitate
dell’ingresso
Perturbazioni impulsive
dello stato/ingresso

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 48
Proprietà generali della risposta al gradino unitario Valore a regime
valore assunto dall'uscita per t → ∞
y(∞) = 0 se g = - 1 zero nell'origine
y(∞) = ∞ se g = 1 polo nell'origine
Applicando il teorema del valore finale
y ∞( ) = lims→0
s µsg
1+Tis( ) 1+ 2ζ is /αni + s2 /αn1
2( )i∏i∏1+ τ is( ) 1+ 2δ is /ωni + s
2 /ωni2( )i∏i∏
⎛
⎝⎜
⎞
⎠⎟1s
y(∞) = µ se g = 0
limt→∞
y t( )Se il esiste
il teorema non si applica a sistemi instabili • f.d.t. con poli a parte reale positiva • f.d.t. con poli a parte reale nulla ma multipli

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 49
y ∞( )= lim
s→0s a
s + b⎛
⎝⎜⎜⎜
⎞
⎠⎟⎟⎟⎟1s
=ab
y ∞( )= lim
s→0s as
s + b⎛
⎝⎜⎜⎜
⎞
⎠⎟⎟⎟⎟1s
= 0
Proprietà generali della risposta al gradino unitario Valore assunto a regime dall'uscita per ingresso a
gradino unitario esempi
y ∞( ) = lims→0
s as
⎛⎝⎜
⎞⎠⎟1s= ∞
non c'è valore di regime
teorema del valore finale

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 50
Proprietà generali della risposta al gradino unitario Valore dell'uscita in corrispondenza della
discontinuità unitaria dell'ingresso
y 0+( )= lims→∞
sbis
i
i=0
m
∑
aisi
i=0
n
∑
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
1s
Dalla f.d.t. (teorema del valore iniziale)
Ricordando il teorema della derivata (con condizioni iniziali nulle) il procedimento si può estendere al calcolo delle derivate
y 0+( )= lim
s→∞s sG s( )1
s⎛
⎝⎜⎜⎜
⎞
⎠⎟⎟⎟⎟
.
.

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 51
Proprietà generali della risposta al gradino unitario Valore dell'uscita in corrispondenza della
discontinuità unitaria dell'ingresso
y 0+( )= lim
s→∞s a
s + b1s
= 0
y 0+( )= lim
s→∞s s a
s + b1s
⎛
⎝⎜⎜⎜
⎞
⎠⎟⎟⎟⎟= a La derivata prima dell'uscita
è discontinua in t = 0
L'uscita è continua in t = 0
Sistema del primo ordine senza zeri
condizione iniziale

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 52
Proprietà generali della risposta al gradino unitario Uscita di un sistema in corrispondenza di una
discontinuità unitaria dell'ingresso
y 0+( )= lim
s→∞s as
s + b1s
= a
y 0+( )= lim
s→∞s s sa
s + b1s
⎛
⎝⎜⎜⎜
⎞
⎠⎟⎟⎟⎟=∞
Sistema del primo ordine con zero nell'origine
La derivata prima dell'uscita è infinita in t = 0
L'uscita è discontinua in t = 0
condizione iniziale

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 53
Proprietà generali della risposta al gradino unitario Uscita di un sistema in corrispondenza di una
discontinuità unitaria dell'ingresso
y 0+( )= lim
s→∞s a
s2 + bs + c1s
= 0
y 0+( )= lim
s→∞s s a
s2 + bs + c1s
⎛
⎝⎜⎜⎜
⎞
⎠⎟⎟⎟⎟= 0
y 0+( )= lim
s→∞s s s a
s2 + bs + c1s
⎛
⎝⎜⎜⎜
⎞
⎠⎟⎟⎟⎟
⎛
⎝⎜⎜⎜⎜
⎞
⎠⎟⎟⎟⎟= a discontinua
continue
Sistema del secondo ordine senza zeri
direttamente dalla f.d.t usando il teorema del valore iniziale
condizione iniziale

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 54
Proprietà generali della risposta al gradino unitario Valore assunto dall'uscita a regime
Analisi dell'equazione differenziale
Analisi della f.d.t.

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 55
Proprietà generali della risposta al gradino unitario Valore assunto dall'uscita a regime
Analisi dell'equazione differenziale
Analisi della f.d.t.

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 56
Proprietà generali della risposta al gradino unitario Valore assunto dall'uscita a regime
Analisi dell'equazione differenziale
Analisi della f.d.t.
non c'è valore di regime

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 57
Proprietà generali della risposta al gradino unitario Valore dell'uscita in corrispondenza della
discontinuità dell'ingresso
si integra tante volte quante servono per ottenere la derivata
desiderata dell'uscita (n volte per ottenere l'uscita)
Si guarda l'ingresso: • se compare direttamente, la derivata di y sarà discontinua • se compare sotto integrale, la derivata di y è continua
dnydt n
= − aidyi
dt ii=0
n−1
∑ + bidixdt ii=0
m
∑Analisi dell'equazione differenziale

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 58
Proprietà generali della risposta al gradino unitario Valore dell'uscita in corrispondenza della
discontinuità dell'ingresso
y 0( ) = lims→∞
sbis
i
i=0
m
∑
aisi
i=0
n
∑
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟
1s
Analisi della f.d.t. (teorema del valore iniziale)
= 0 se m < n
= bman
se m = n
Ricordando il teorema della derivata (con condizioni iniziali nulle) il procedimento si può estendere al calcolo delle derivate
y 0( ) = lim
s→∞s sY s( )( )
.
.

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 59
Proprietà generali della risposta al gradino unitario Valore dell'uscita in corrispondenza della
discontinuità dell'ingresso
G s( ) = as + b
y = −b ydt0
t
∫ + a xdt0
t
∫
dydt
= −by + ax per t = 0
per t = 0
y 0( ) = lims→∞
s as + b
1s= 0
y 0( ) = lims→∞
s s as + b
1s
⎛⎝⎜
⎞⎠⎟ = a
Teorema del valore iniziale y 0( ) = lims→∞
sY s( )
y 0( ) = lim
s→∞s sY s( )( )

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 60
Proprietà generali della risposta al gradino unitario Uscita di un sistema in corrispondenza di una
discontinuità unitaria dell'ingresso
G s( ) = ass + b
dydt
= −by + a dxdt
y = −b ydt0
t
∫ + ax per t = 0
y 0( ) = lims→∞
s ass + b
1s= a
y 0( ) = lims→∞
s s sas + b
1s
⎛⎝⎜
⎞⎠⎟ = ∞
Teorema del valore iniziale y 0( ) = lims→∞
sY s( )
y 0( ) = lim
s→∞s sY s( )( )

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 61
Proprietà generali della risposta al gradino unitario Uscita di un sistema in corrispondenza di una
discontinuità dell'ingresso dall'equazione differenziale
G s( ) = as2 + bs + c
dydt
= −by − c ydt0
t
∫ + a x0
t
∫
d 2ydt 2
= −b dydt
− cy + ax
y = −b y0
t
∫ − c ydtt∫∫ + a xdt
t∫∫
per t = 0
per t = 0
per t = 0

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 62
Proprietà generali della risposta al gradino unitario Uscita di un sistema in corrispondenza di una
discontinuità dell'ingresso dalla G(s)
G s( ) = as2 + bs + c
y 0( ) = lims→∞
s as2 + bs + c
1s= 0
y 0( ) = lims→∞
s s as2 + bs + c
1s
⎛⎝⎜
⎞⎠⎟ = 0
y 0( ) = lims→∞
s s s as2 + bs + c
1s
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟= a
Teorema del valore iniziale y 0( ) = lims→∞
sY s( )
y 0( ) = lim
s→∞s sY s( )( )
y 0( ) = lim
s→∞s s2Y s( )( )

Prof. Carlo Rossi – Controlli Automatici LA Laplace e strumenti collegati 63
Riferimenti bibliografici Per approfondimenti
Boltzern, Scattolini, Schiavoni "Fondamenti di Controlli Automatici", McGraw-Hill, II edizione Capitolo 3, 4, 5, appendice B
Marro "Controlli Automatici", Zanichelli, V edizione, Capitolo 1, 2

Controlli Automatici Analisi dei sistemi dinamici lineari
Funzione di trasferimento stabilita dei sistemi lineari
proprietà generali della risposta al gradino Fine
Prof. Carlo Rossi DEIS-Università di Bologna
Tel. 051 2093020 Email: [email protected]
URL: www-lar.deis.unibo.it/~crossi