Capitolo III: Geometria analitica nel piano -...
18
Liceo Lugano 1, 2011-2012 2E (Luca Rovelli) Capitolo III: Geometria analitica nel piano 1. Vettori e coordinate cartesiane Grazie all’introduzione degli assi cartesiani Ox e Oy, il piano geometrico viene iden- tificato con il piano cartesiano R 2 = {(x, y)|x, y ∈ R} . Ad ogni punto P del piano corrisponde esattamente una coppia ordinata di numeri reali (x P ,y P ) (rispettivamente l’ascissa e l’ordinata di P ). Per indicare il punto P di coordinate x P ,y P si scrive sem- plicemente P (x P ,y P ). Sia O(0, 0) l’origine degli assi cartesiani, e siano I (1, 0) e J (0, 1). Allora n -→ OI, -→ OJ o ` e una base ortonormata di V 2 (la base standard): ~ i := -→ OI = 1 0 , ~ j := -→ OJ = 0 1 . Per il punto P (x P ,y P ) ∈ R 2 vale -→ OP = x P · ~ i + y P · ~ j = x P y P . Il vettore -→ OP ∈ V 2 ` e detto vettore luogo del punto P ∈ R 2 . Conoscere le componenti del vettore luogo di un punto P equivale a conoscere le coordinate di P . Questo approccio, che sfrutta le propriet`a dei vettori, permette una trattazione elegante e sintetica della geometria analitica. Risolviamo ora alcuni problemi elementari della geometria analitica con l’aiuto dei vettori: a) Dati i punti A(x A ,y A ) e B(x B ,y B ), scrivi il vettore -→ AB in componenti: Otteniamo immediatamente -→ AB = --→ OB - -→ OA = x B y B - x A y A cio` e -→ AB = x B - x A y B - y A Geometria analitica (V0.2) 56 LiLu1, 2E (Luca Rovelli)
Transcript of Capitolo III: Geometria analitica nel piano -...

Liceo Lugano 1, 2011-2012 2E (Luca Rovelli)
Capitolo III:Geometria analitica nel piano
1. Vettori e coordinate cartesiane
Grazie all’introduzione degli assi cartesiani Ox e Oy, il piano geometrico viene iden-tificato con il piano cartesiano R2 = {(x, y)|x, y ∈ R} . Ad ogni punto P del pianocorrisponde esattamente una coppia ordinata di numeri reali (xP , yP ) (rispettivamentel’ascissa e l’ordinata di P ). Per indicare il punto P di coordinate xP , yP si scrive sem-plicemente P (xP , yP ).
Sia O(0, 0) l’origine degli assi cartesiani, e siano I(1, 0) e J(0, 1). Allora{−→OI,−→OJ}
e una
base ortonormata di V2 (la base standard):
~i :=−→OI =
(10
), ~j :=
−→OJ =
(01
).
Per il punto P (xP , yP ) ∈ R2 vale
−→OP = xP ·~i+ yP ·~j =
(xPyP
).
Il vettore−→OP ∈ V2 e detto vettore luogo
del punto P ∈ R2.
Conoscere le componenti del vettore luogo di un punto P equivale a conoscere le coordinatedi P . Questo approccio, che sfrutta le proprieta dei vettori, permette una trattazioneelegante e sintetica della geometria analitica.
Risolviamo ora alcuni problemi elementari della geometria analitica con l’aiuto deivettori:
a) Dati i punti A(xA, yA) e B(xB, yB), scrivi il vettore−→AB in componenti:
Otteniamo immediatamente
−→AB =
−−→OB −
−→OA =
(xByB
)−(xAyA
)
cioe−→AB =
(xB − xAyB − yA
)
Geometria analitica (V0.2) 56 LiLu1, 2E (Luca Rovelli)
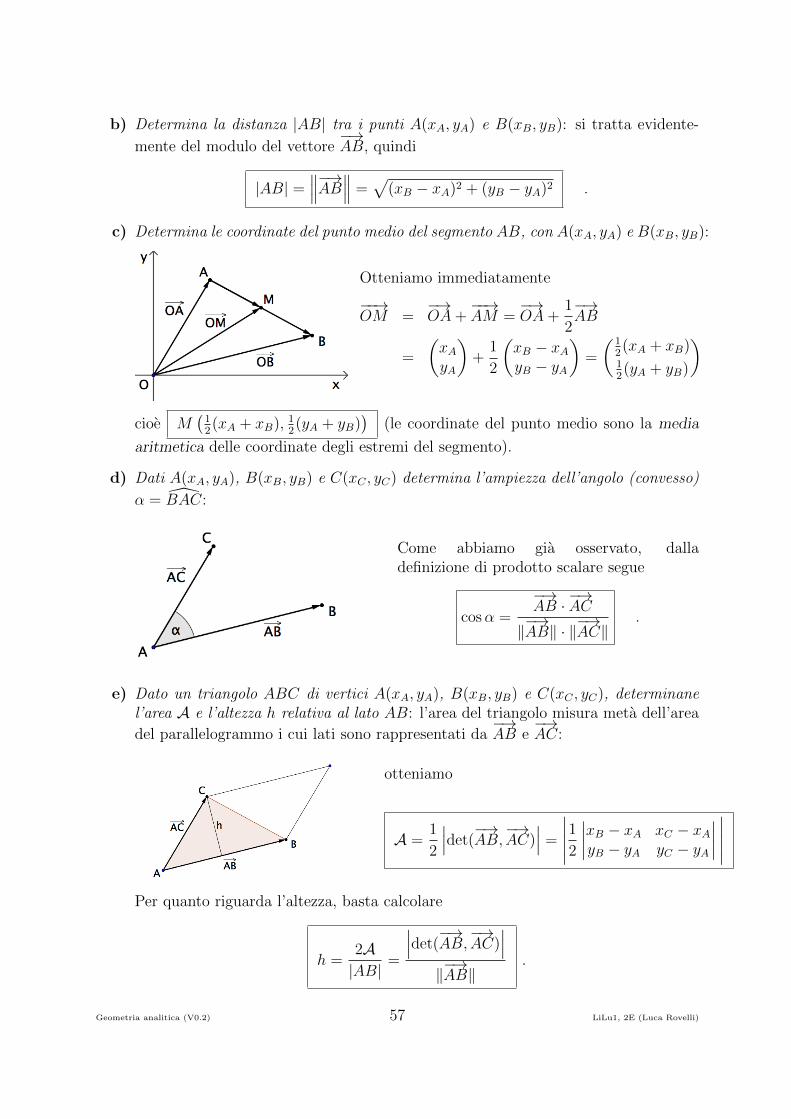
b) Determina la distanza |AB| tra i punti A(xA, yA) e B(xB, yB): si tratta evidente-
mente del modulo del vettore−→AB, quindi
|AB| =∥∥∥−→AB∥∥∥ =
√(xB − xA)2 + (yB − yA)2 .
c) Determina le coordinate del punto medio del segmento AB, con A(xA, yA) e B(xB, yB):
Otteniamo immediatamente
−−→OM =
−→OA+
−−→AM =
−→OA+
1
2
−→AB
=
(xAyA
)+
1
2
(xB − xAyB − yA
)=
(12(xA + xB)
12(yA + yB)
)
cioe M(12(xA + xB), 1
2(yA + yB)
)(le coordinate del punto medio sono la media
aritmetica delle coordinate degli estremi del segmento).
d) Dati A(xA, yA), B(xB, yB) e C(xC , yC) determina l’ampiezza dell’angolo (convesso)
α = BAC:
Come abbiamo gia osservato, dalladefinizione di prodotto scalare segue
cosα =
−→AB ·
−→AC
‖−→AB‖ · ‖
−→AC‖
.
e) Dato un triangolo ABC di vertici A(xA, yA), B(xB, yB) e C(xC , yC), determinanel’area A e l’altezza h relativa al lato AB: l’area del triangolo misura meta dell’area
del parallelogrammo i cui lati sono rappresentati da−→AB e
−→AC:
otteniamo
A =1
2
∣∣∣det(−→AB,−→AC)
∣∣∣ =
∣∣∣∣∣12∣∣∣∣xB − xA xC − xAyB − yA yC − yA
∣∣∣∣∣∣∣∣∣
Per quanto riguarda l’altezza, basta calcolare
h =2A|AB|
=
∣∣∣det(−→AB,−→AC)
∣∣∣‖−→AB‖
.
Geometria analitica (V0.2) 57 LiLu1, 2E (Luca Rovelli)

2. La retta nel piano cartesiano
Una retta r nel piano e determinata in modo univoco da un punto P0(x0, y0) su di essa e
da un vettore ~v =(v1v2
)parallelo ad essa (un vettore direttore) di r.
P (x, y) giace su r
⇐⇒−−→P0P e ~v sono collineari
⇐⇒ ∃λ ∈ R :−−→P0P = λ · ~v
⇐⇒ ∃λ ∈ R :−→OP −
−−→OP0 = λ · ~v
⇐⇒ ∃λ ∈ R :−→OP =
−−→OP0 + λ · ~v
L’equazione vettoriale
r :−→OP =
−−→OP0 + λ · ~v oppure, in componenti, r :
(xy
)=
(x0y0
)+ λ ·
(v1v2
)e l’equazione parametrica (vettoriale) della retta r. Al variare del parametro λ,−−→OP0 + λ · ~v percorre i vettori luogo di tutti i punti sulla retta r. Quindi, variando λnell’espressione in componenti si ottengono le coordinate P (x, y) di tutti i punti sullaretta r.
Scrivendo separatamente le componenti dei vettori, si ricavano le equazioni parametriche(numeriche) della retta:
r :
{x = x0 + λ · v1y = y0 + λ · v2
Esempi:
1) Determina un’equazione parametrica della retta r passante per A(4, 5) e parallela al
vettore ~v =(
3−2
).
Con P0 = A, possiamo scrivere immediatamente
r :
(xy
)︸︷︷︸−−→OP
=
(45
)︸︷︷︸−→OA
+λ ·(
3−2
)︸ ︷︷ ︸
~v
oppure r :
{x = 4 + 3λ
y = 5− 2λ.
2) Determina un’equazione parametrica della retta s passante per A(−1, 2) e B(5, 6).
Possiamo scegliere P0 = A e ~v =−→AB =
(64
), e quindi
s :
(xy
)=
(−12
)+ λ ·
(64
)oppure s :
{x = −1 + 6λ
y = 2 + 4λ.
Geometria analitica (V0.2) 58 LiLu1, 2E (Luca Rovelli)

Osservazione: l’equazione parametrica di una retta non e unica: in essa compaiono lecoordinate di un punto P0 ∈ r qualsiasi e le componenti di un vettore ~v ‖ r qualsiasi.
Ad esempio: nell’es. 2) avremmo potuto scegliere P0 = B(5, 6) e dimezzare il vettore−→AB (per semplificare la scrittura):
s :
(xy
)=
(56
)︸︷︷︸−−→OB
+λ ·(
32
)︸︷︷︸12
−→AB
e un’altra parametrizzazione possibile della retta s (si chiama parametrizzazione la sceltadi un’equazione parametrica).
Eliminando con le consuete tecniche algebriche il parametro λ dal sistema di equazioni{x = x0 + λ · v1y = y0 + λ · v2
si ottiene l’equazione cartesiana di una retta, nella forma esplicita
y = mx+ q
(cioe come grafico di una funzione affine) oppure nella forma implicita
ax+ by + c = 0 .
Esempi (v. sopra):
1) r :
{x = 4 + 3λ (I)
y = 5− 2λ (II); da 2 · (I) + 3 · (II) otteniamo 2x+ 3y = 8 + 15 , e
r : 2x+ 3y − 23 = 0 (implicita) risp. r : y = −2
3x+
23
3(esplicita) .
2)
{x = −1 + 6λ
y = 2 + 4λ; confrontando λ = 1
6(x+ 1) = 1
4(y − 2) ricaviamo
4x+ 4 = 6y − 12 ⇐⇒ 4x− 6y + 16 = 0 ;
dividendo per 2, infine,
r : 2x− 3y + 8 = 0 (implicita) risp. r : y =2
3x+
8
3(esplicita) .
Osservazioni:
(i) L’equazione implicita di una retta non e unica (lo e soltanto ”a meno di una costantemoltiplicativa”): ad esempio, abbiamo appena notato che 4x − 6y + 16 = 0 e2x− 3y + 8 = 0 definiscono la stessa retta.
Geometria analitica (V0.2) 59 LiLu1, 2E (Luca Rovelli)

(ii) Per contro, l’equazione esplicita e unica, ma essa non esiste sempre: in particolare,una retta verticale puo essere descritta soltanto da un’equazione parametrica o daun’equazione cartesiana implicita (in quanto essa non rappresenta il grafico di unafunzione!).
Consideriamo ad esempio la retta verticale per P0(5, 5); con ~v =(01
)vale
r :
(xy
)=
(55
)+ λ ·
(01
)risp.
{x = 5
y = 5 + λ;
ricaviamo immediatamente x − 5 = 0 quale equazione implicita, ma nessunarelazione del tipo y = mx+ q.
Per scrivere l’equazione parametrica di una retta data con l’equazione cartesiana, e utilericordare il significato geometrico dei parametri m (pendenza, o coefficiente angolare) e q(ordinata all’origine):
Con P0(0, q) e ~v =
(1m
)ricaviamo
r :
(xy
)=
(0q
)+ λ ·
(1m
)risp. r :
{x = λ
y = q + λ ·m
(ovvero, scegliamo x quale parametro).
Ad esempio, per la retta r : y = −2x+ 7 utilizziamo P0(0, 7) e ~v =(
1−2
), ricavando
r :
(xy
)=
(07
)+ λ ·
(1−2
).
Osservazione: le tre equazioni viste per descrivere una retta nel piano contengono in-formazioni geometriche diverse, e quindi si prestano di volta in volta alla risoluzione diproblemi geometrici diversi:
• l’equazione parametrica−→OP =
−−→OP0+λ~v contiene le coordinate di un punto P (x0, y0)
giacente sulla retta e le componenti di un vettore ~v =(v1v2
)ad essa collineare; tale
equazione esprime le coordinate dei punti della retta in funzione del parametro1, erappresenta una funzione
R −→ R2
λ 7−→ P (λ) = P (x0 + λ v1 , y0 + λ v2 ) ;
1in generale, una funzione ”continua” R→ R2 rappresenta la parametrizzazione di una curva nel piano
Geometria analitica (V0.2) 60 LiLu1, 2E (Luca Rovelli)

• l’equazione cartesiana esplicita y = mx + q descrive la retta come grafico di unafunzione affine f : R → R; e facile mostrare che m = tanα ove α e l’angoloorientato che la retta forma con l’asse delle ascisse, e q = f(0) e l’ordinata del puntod’intersezione della retta con l’asse Oy;
• l’equazione cartesiana implicita, invece, contiene le componenti del cosiddetto vet-tore normale alla retta:
Lemma 1 (Vettore normale ad una retta)
Il vettore ~n =(ab
)e perpendicolare alla retta di equazione cartesiana
r : ax+ by + c = 0 .
Dimostrazione: nella forma implicita, la retta ha equazione r : y = −abx − c
b;
pertanto, come abbiamo gia visto, essa ha la direzione del vettore ~v =(
1−a
b
).
Il vettore ~n e perpendicolare a r se vale ~n · ~v = 0; verifichiamolo dunque esplicita-mente:
~n · ~v =
(1−a
b
)·(ab
)= a+ b ·
(−ab
)= 0 �
3. Intersezione di 2 rette
Se le due rette r e s sono date per mezzo delle equazioni parametriche
r :
(xy
)︸︷︷︸−−→OP
=
(x0y0
)︸ ︷︷ ︸−−→OP0
+λ ·(v1v2
)︸ ︷︷ ︸
~v
risp. s :
(xy
)︸︷︷︸−−→OP
=
(x′0y′0
)︸ ︷︷ ︸−−→OQ0
+µ ·(w1
w2
)︸ ︷︷ ︸
~v′
nel punto d’intersezione P = r ∩ s deve valere−−→OP0 + λ~v =
−−→OQ0 + µ~w;
uguagliando quindi le equazioni parame-triche, ci si riconduce al sistema di equazioni{
x0 + λ v1 = x′0 + µw1
y0 + λ v2 = y′0 + µw2
(1)
con incognite i parametri λ e µ .
Nota che occorre utilizzare due parametri diversi per le due rette! (Perche?)
Geometria analitica (V0.2) 61 LiLu1, 2E (Luca Rovelli)

Esempio: intersechiamo le rette
r :
(xy
)=
(12
)+ λ ·
(1−1
)e s :
(xy
)=
(−4−3
)+ µ ·
(41
);
risolviamo quindi il sistema{1 + λ = −4 + 4µ
2− λ = −3 + µ⇐⇒
{λ− 4µ = −5
λ+ µ = 5;
dalla differenza delle due equazioni risulta −5µ = −10 ⇐⇒ µ = 2 e λ = 5 − µ = 3.Quindi, S = {(3, 2)} e si ottengono le coordinate di P = r ∩ s sostituendo λ = 3 nelleequazioni parametriche di r :
P (1 + λ, 2− λ) = P (4,−1) ,
oppure sostituendo µ = 2 nelle equazioni parametriche di s :
P (−4 + 4µ,−3 + µ) = P (4,−1) .
Osservazione: risolvendo il sistema (1), possono presentarsi tre casi:
• S = {(λ, µ)} : il sistema ha una sola soluzione, e le rette sono incidenti (v. sopra);
• S = ∅ : il sistema non ha soluzioni, e le rette sono parallele;
• S contiene un’infinita di elementi: le due equazioni del sistema sono equivalenti, ele due rette coincidono (si tratta cioe di due diverse parametrizzazioni della stessaretta).
Se, invece, le due rette r e s sono date per mezzo delle equazioni cartesiane (nella forma
implicita o esplicita), le coordinate del punto d’intersezione sono le soluzioni di un (sem-plice) sistema di equazioni:
P (x, y) ∈ r ∩ s ⇐⇒
{ax+ by + c = 0
a′x+ b′y + c′ = 0⇐⇒
{y = mx+ q
y = m′x+ q′.
Geometria analitica (V0.2) 62 LiLu1, 2E (Luca Rovelli)

Esempio: e facile mostrare (ed e un utile esercizio!) che le equazioni cartesiane esplicitedelle rette r e s intersecate sopra sono
r : y = −x+ 3 e y =1
4x− 2 ;
risolviamo il sistema:{y = −x+ 3
y = 14x− 2
⇒ −x+ 3 =1
4x− 2 ⇒ −5
4x = −5 ⇒ x = 4
e quindi y = −4 + 3 = −1. Il punto d’intersezione e quindi P (4,−1).
4. Parallelismo, ortogonalita, angoli
L’intuizione geometrica vettoriale puo essere applicata in modo molto efficace se due rettesono date mediante le equazioni parametriche
r :−→OP =
−−→OP0 + λ~v e s :
−→OP =
−−→OP ′0 + µ~w .
• Parallelismo : chiaramente,
r ‖ s ⇐⇒ i vettori direttori ~v e ~w sono collineari .
Esempio: le rette
r :
(xy
)=
(17
)+ λ ·
(3−2
)e s :
(xy
)=
(−1−1
)+ λ ·
(−3
2
1
)sono parallele, perche
(3−2
)= −2 ·
(− 3
21
).
La coincidenza di due rette puo essere considerata come un caso particolare diparallelismo: per verificare che r = s, si puo verificare che P0 ∈ s oppure cheQ0 ∈ r. Ad esempio, e facile verificare che
r :
(xy
)=
(17
)+ λ ·
(3−2
)e s :
(xy
)=
(45
)+ λ ·
(−3
2
1
)sono coincidenti.
• Ortogonalita : vale
r ⊥ s ⇐⇒ ~v ⊥ ~w ⇐⇒ ~v · ~w = 0 .
Esempio: le rette
r :
(xy
)=
(12
)+ λ ·
(74
)e s :
(xy
)=
(−53
)+ λ ·
(−47
)sono ortogonali, perche
(74
)·(−47
)= 7 · (−4) + 4 · 7 = 0 .
Geometria analitica (V0.2) 63 LiLu1, 2E (Luca Rovelli)

• Angolo acuto α tra due rette: si tratta dell’angolo acuto tra le direzioni ~v e ~w; valequindi
cosα =|~v · ~w|‖~v‖ · ‖~w‖
;
il valore assoluto al numeratore garantisce che cosα ∈ [0, 1] ⇐⇒ α ∈ [0◦, 90◦] .
Esempio: determiniamo l’ampiezza dell’angolo acuto tra le rette r e s dell’ esempioa pag. 62:
|~v · ~w|‖~v‖ · ‖~w‖
=
∣∣∣∣( 1−1
)·(
41
)∣∣∣∣∥∥∥∥( 1−1
)∥∥∥∥ · ∥∥∥∥(41
)∥∥∥∥ =|4− 1|√2 ·√
17=
3√34
e α = arccos(
3√34
)∼= 59, 04◦ .
Supponiamo ora che le rette siano date mediante le equazioni cartesiane esplicite
r : y = mx+ q e s : y = m′x+ q′ .
Ricordando quanto visto a pagina 60, possiamo scrivere
r :
(xy
)=
(0q
)+ λ ·
(1m
)risp. s :
(xy
)=
(0q′
)+ λ ·
(1m′
),
e quindi fare nuovamente riferimento all’interpretazione vettoriale della geometria anali-tica.
• Parallelismo : vale
r ‖ s ⇐⇒(
1m
)‖(
1m′
)⇐⇒ m = m′;
com’era gia noto, due rette sono parallele se possiedono la stessa pendenza.
Esempio: le rette
r : y = πx+ 3e2 e s : y = πx−√
2
sono parallele.
• Ortogonalita : vale
r ⊥ s ⇐⇒(1m
)⊥(
1m′
)⇐⇒
(1m
)·(
1m′
)= 1+mm′ = 0 ⇐⇒ m·m′ = −1
(anche qui si tratta di una condizione gia nota).
Esempio: le rette
r : y =3
4x+ 2 e s : y = −4
3x+ 8
sono ortogonali.
Geometria analitica (V0.2) 64 LiLu1, 2E (Luca Rovelli)

• Angolo acuto α tra due rette: possiamo procedere in due modi.
◦ Come sopra, calcoliamo
cosα =|~v · ~w|‖~v‖ · ‖~w‖
con ~v =
(1m
)e ~w =
(1m′
).
◦ Oppure, ricordando che m = tanϕ e m′ = tanϕ′ ove ϕ e ϕ′ sono gli angoliformati dalle rette r e s con l’orizzontale, sfruttiamo la formula di sottrazioneper la tangente:
tanα = tan(ϕ−ϕ′) =tanϕ− tanϕ′
1 + tanϕ · tanϕ′
Con il valore assoluto garantiamo inoltre che l’angolo sia acuto:
tanα =
∣∣∣∣ m−m′1 +mm′
∣∣∣∣ .
Esempio: determiniamo nuovamente l’ampiezza dell’angolo acuto tra le rette r e sdell’ esempio a pag. 62;
tanα =
∣∣∣∣∣ −1− 14
1 + 1 ·(−1
4
)∣∣∣∣∣ =5
4· 4
3=
5
3
e α = arctan(53
) ∼= 59, 04◦ .
Accenniamo, infine, al caso in cui le rette sono date mediante le equazioni cartesiane implicite
r : ax+ by + c = 0 e s : a′x+ b′y + c′ = 0 .
Ricordando (vedi Lemma 1, pag. 61) che i rispettivi vettori normali sono ~n =(ab
)e
~n′ =(a′
b′
)possiamo affermare quanto segue:
• Parallelismo : due rette sono parellele se e soltanto se le rispettive direzioni normalisono parallele; quindi, r ‖ s ⇐⇒ ~n e ~n′ sono collineari.
• Ortogonalita : due rette sono ortogonali se e soltanto se le rispettive direzioni nor-mali sono ortogonali; quindi, r ⊥ s ⇐⇒ ~n ⊥ ~n′ ⇐⇒ ~n · ~n′ = 0 .
• Angolo acuto α tra due rette: si tratta dell’angolo tra le direzioni di ~n e ~n′; vale
quindi cosα = |~n·~n′|‖~n‖·‖~n′‖ .
Geometria analitica (V0.2) 65 LiLu1, 2E (Luca Rovelli)

5. La distanza tra un punto e una retta
Definizione 1 (Distanza)Siano r una retta e P un punto del piano. Allora, la distanza tra P e r, denotata
dist(P, r), e la distanza minima tra P e un punto di r :
dist(P, r) = minQ∈r|PQ| .
Osservazione: sia Q il punto sulla retta r aventedistanza minima da P ; allora e facile intuire che ilsegmento PQ e perpendicolare a r. Quindi, per de-terminare d = dist(P, r) potremmo ricavare dapprimaun’equazione per la retta s con P ∈ s e s ⊥ r, de-terminare le coordinate di Q = r ∩ s e infine calcolared = |PQ|.
Esempio: determiniamo dist(P, r), con P (10, 4) e r : y = 32x+ 2 .
Il coefficiente angolare della retta passante per P e perpendicolare a r e pari a −23; da
P ∈ s segue
−2
3· 10 + q = 4 ⇒ q = 4 +
20
3=
32
3;
intersechiamo quindi r con s : y = −23x+ 32
3:
3
2x+2 = −2
3x+
32
3⇐⇒ 13
6x =
26
3⇐⇒ x =
��>2
26
���1
3
· ���2
6
��>1
13= 4 ⇐⇒ y =
3
2· 4+2 = 8 .
Vale quindi r ∩ s = Q(4, 8), e
dist(P, r) = |PQ| =√
(4− 10)2 + (8− 4)2 =√
36 + 16 =√
52 = 2√
13 .
Cerchiamo ora di trovare una formula per la distanza tra retta e punto.
Se la retta e data mediante l’ equazione parametrica
r :−→OP =
−−→OP0 + λ~v ,
la distanza dist(P, r) corrisponde all’altezza del paral-
lelogrammo di lati equivalenti a ~v e−−→P0P , e puo essere
quindi calcolata come rapporto tra area e base dellostesso:
dist(P, r) =
∣∣∣det(~v ,−−→P0P )
∣∣∣‖~v‖
.
Geometria analitica (V0.2) 66 LiLu1, 2E (Luca Rovelli)

Esempio: l’equazione parametrica r :(xy
)=
(25
)+ λ ·
(23
)descrive la stessa retta
dell’esempio precedente; calcoliamo nuovamente d = dist(P, r), con P (10, 4) .
Ricaviamo
d =
∣∣∣∣∣det(~v ,−−→P0P )
‖~v‖
∣∣∣∣∣ =
∣∣∣∣∣∣∣∣∣∣∣∣2 10− 23 4− 5
∣∣∣∣∥∥∥∥(23
)∥∥∥∥∣∣∣∣∣∣∣∣ =
∣∣∣∣2 · (−1)− 3 · 8√22 + 32
∣∣∣∣ =26√13
= 2√
13 .
Se la retta e data mediante l’ equazione cartesiana implicita , la formula per la distanzasi rivela particolarmente semplice; difatti vale il
Teorema 2Siano
r : ax+ by + c = 0 e P (xP , yP ) ;
allora vale
dist(P, r) =|axP + byP + c|√
a2 + b2.
Dimostrazione: riscriviamo l’equazione in forma parametrica, ricordando quanto vistoa pag. 60:
r : ax+ by + c = 0 ⇐⇒ r : −abx− c
b⇒
(xy
)=
(0− c
b
)+ λ ·
(b−a
).
Con P0(0,− cb) e−−→P0P =
(xP
yP + cb
)vale quindi
dist(P, r) =
∣∣∣det(~v , −−→P0P )∣∣∣
‖~v‖=
∣∣∣∣∣∣∣∣∣∣∣∣ b xP−a yP + c
b
∣∣∣∣√b2 + (−a)2
∣∣∣∣∣∣∣∣ =∣∣b(yP + c
b)− (−a)xP∣∣
√a2 + b2
=|axP + byP + c|√
a2 + b2�
Esempio: calcoliamo nuovamente dist(P, r), con P (10, 4) e r : y = 32x+ 2 .
L’equazione implicita della retta in questione puo essere scritta come segue:
r : y =3
2x+ 2 ⇐⇒ r :
3
2x− y + 2 = 0 ⇐⇒ r = 3x− 2y + 4 = 0
e quindi vale
dist(P, r) =|3 · 10− 2 · 4 + 4|√
32 + 22=
26√13
= 2√
13 .
Geometria analitica (V0.2) 67 LiLu1, 2E (Luca Rovelli)

6. La circonferenza
Ricorda: la circonferenza C di raggio r e centro C e il luogo geometrico dei punti Pdel piano tali che |CP | = r.
Dalla definizione geometrica ricaviamo immediatamente l’equazione cartesiana di unacirconferenza:
siano r > 0 e C(xC , yC); allora vale
P (x, y) ∈ C⇐⇒ |CP | = r
⇐⇒√
(x− xC)2 + (y − yC)2 = r
⇐⇒ C : (x− xC)2 + (y − yC)2 = r2 .
Osservazione: se C coincide con l’origine degli assi cartesiani l’equazione ha la formax2 + y2 = r2; per r = 1 si ottiene la circonferenza trigonometrica.
Esempi:
1) Determina l’equazione cartesiana della circonferenza di raggio 7 e centro C(5, 4).
Si tratta, evidentemente, di
C : (x− 5)2 + (y − 4)2 = 49 .
2) Determina l’equazione cartesiana della circonferenza di centro C(−2, 3) passanteper il punto P (1, 1).
Il raggio e pari a |CP | =√
(1− (−2))2 + (1− 3)2 =√
32 + 22 =√
13, e quindi vale
C : (x+ 2)2 + (y − 3)2 = 13 .
Sciogliendo le parentesi, l’equazione cartesiana della circonferenza puo anche essere scrittanella cosiddetta forma generale
C : x2 + y2 + ax+ by + c = 0 .
Negli esempi visti sopra vale
1) (x− 5)2 + (y − 4)2 = 49 ⇐⇒ x2 − 10x+ 25 + y2 − 8y + 16 = 49
⇐⇒ C : x2 + y2 − 10x− 8y − 8 = 0 ;
2) (x+ 2)2 + (y − 3)2 = 13 ⇐⇒ x2 + 4x+ 4 + y2 − 6y + 9 = 13
⇐⇒ C : x2 + y2 + 4x− 6y = 0 (che particolarita ha questa circonferenza?).
Geometria analitica (V0.2) 68 LiLu1, 2E (Luca Rovelli)

Viceversa, completando i quadrati, e possibile passare dalla seconda alla prima forma, equindi ricavare centro e raggio di una circonferenza data mediante l’equazione generale.
Esempi: ricava il centro C e il raggio r della circonferenza data.
1) C : x2 + y2 + 14x− 15 = 0; otteniamo
(x+ 7)2 − 49 + y2 − 15 = 0 ⇐⇒ (x+ 7)2 + (y − 0)2 = 82 ;
centro: C(−7, 0), raggio: r = 8 unita.
2) C : x2 + y2 + 2x+ 12y + 1 = 0; otteniamo
(x+ 1)2 − 1 + (y + 6)2 − 36 + 1 = 0 ⇐⇒ (x+ 1)2 + (y + 6)2 = 62 ;
centro: C(−1,−6), raggio: r = 6 unita.
Una circonferenza di raggio r e centro C(xC , yC) puo anche essere espressa mediante
un’equazione parametrica: ricordando che, al variare di ϕ, il vettore ~v(ϕ) =
(cosϕsinϕ
)descrive i punti sulla circonferenza unitaria,
il punto P (x, y) giace sulla circonferenza se per uncerto ϕ ∈ R vale
⇐⇒−→OP =
−→OC + r · ~v(ϕ)
⇐⇒ C :
(xy
)=
(xCyC
)+
(r cosϕr sinϕ
)
⇐⇒ C :
{x = xC + r cosϕ
y = yC + r sinϕ.
Esempi: per le circonferenze studiate sopra, le equazioni parametriche sono
1) C :
(xy
)=
(−70
)+
(8 cosϕ8 sinϕ
)oppure C :
{x = −7 + 8 cosϕ
y = 8 sinϕ;
2) C :
(xy
)=
(−1−6
)+
(6 cosϕ6 sinϕ
)oppure C :
{x = −1 + 6 cosϕ
y = −6 + 6 sinϕ.
Geometria analitica (V0.2) 69 LiLu1, 2E (Luca Rovelli)

7. Rette e circonferenze
Per studiare la posizione reciproca di una retta e di una circonferenza conviene far usodelle equazioni cartesiane; cio conduce ad un sistema del tipo{
x2 + y2 + ax+ by + c = 0
y = mx+ q
che puo immediatamente essere ricondotto, mediante sostituzione, ad un’equazione quadra-tica in x.
Esempi: studia la posizione reciproca della retta r e della circonferenza C.
1)
{C : x2 + x2 − 6x− 8y + 9 = 0
r : y = 12x+ 1
2
.
Sostituendo, ricaviamo
x2+
(1
2x+
1
2
)2
−6x−8
(1
2x+
1
2
)+9 = 0 ⇐⇒ . . . ⇐⇒ 5x2−38x+21 = 0
e le due soluzioni sono
x1 =38−
√382 − 20 · 2110
=3
5, x2 =
38 + 32
10= 7 .
Vi sono quindi due punti d’intersezione:
P1
(3
5,4
5
)e P2(7, 4) .
2)
{C : (x+ 2)2 + (y − 4)2 = 9
r : y = 12x+ 1
.
Sostituendo, ricaviamo
(x+ 2)2 +
(1
2x+ 1− 4
)2
= 9 ⇐⇒ . . . ⇐⇒ 5x2 + 4x+ 16 = 0
Calcoliamo il discriminante:
∆ = 42 − 4 · 5 · 16 < 0 ;
l’equazione non ha soluzioni, e pertanto non visono punti d’intersezione.
Geometria analitica (V0.2) 70 LiLu1, 2E (Luca Rovelli)

3)
{C : x2 + y2 − 2x− 4y + 3 = 0
r : y = x− 1.
Sostituendo, ricaviamo
x2 + (x− 1)2 − 2x− 4(x− 1) + 3 = 0 ⇐⇒ . . . ⇐⇒ x2 − 4x+ 4 = 0
Dal momento che
∆ = (−4)2 − 4 · 1 · 4 = 0 ,
l’equazione ha l’unica soluzione
x =−(−4)
2= 2
e quindi retta e circonferenza hanno il solo punto
P (2, 1)
in comune, e sono pertanto tangenti.
Osservazione: come mostrano gli esempi, la posizione reciproca della retta r e della cir-conferenza C si rispecchia nel valore del discriminante dell’equazione quadratica ottenutasostituendo l’equazione cartesiana esplicita di r nell’equazione cartesiana di C:
• ∆ > 0 ⇒ C ∩ r = {P1, P2} (due punti d’intersezione);
• ∆ = 0 ⇒ C ∩ r = {P} (r e C sono tangenti);
• ∆ < 0 ⇒ C ∩ r = ∅ (nessuna intersezione).
La condizione di tangenza ∆ = 0 puo essere sfruttata per determinare l’equazione carte-siana delle rette tangenti ad una circonferenza C passanti per un dato punto P (xP , yP ).
Esempi: dati C e P , ricava le tangenti a C passanti per P .
1) C : x2 + y2 − 2x− 6y + 2 = 0 , P (7, 5) .
Innanzitutto, il fatto che P ∈ r permette di eliminare un parametro dall’equazionecartesiana y = mx+ q della retta:
5 = m · 7 + q ⇒ q = 5− 7m e quindi y = mx+ 5− 7m = m(x− 7) + 5 ;
sostituiamo nell’equazione di C :
x2 + (m(x− 7) + 5)2 − 2x− 6(m(x− 7) + 5) + 2 = 0
⇐⇒ x2 +m2(x− 7)2 + 10m(x− 7) + 25− 2x− 6mx+ 42m− 30 + 2 = 0
⇐⇒ x2 +m2x2 − 14m2x+ 49m2 + 10mx− 70m+ 25− 2x− 6mx+ 42m− 30 + 2 = 0
⇐⇒ (1 +m2)x2 + (−14m2 + 4m− 2)x+ (49m2 − 28m− 3) = 0 .
Geometria analitica (V0.2) 71 LiLu1, 2E (Luca Rovelli)

Calcoliamo il discriminante:
∆ = (−14m2+4m−2)2−4·(1+m2)·(49m2−28m−3) = . . . = −112m2+96m+16 ;
la condizione ∆ = 0 conduce all’equazione quadratica in m
−112m2 + 96m+ 16 = 0 ⇐⇒ 7m2 − 6m− 1 = 0
le cui soluzioni sono m1 = −17
e m2 = 1. Ci sono quindi due rette tangenti, le cuiordinate all’origine sono q1 = 5− 7m1 = 6 e q2 = 5− 7m2 = −2.
Le tangenti a C in P sono quindi
r1 : y = −1
7x+6 e r2 : y = x−2 .
2) C : x2 + y2 − 4x− 4y + 3 = 0 , P (4, 3) .
Come sopra, eliminiamo q da y = mx+ q:
3 = m · 4 + q ⇒ q = 3− 4m e quindi y = mx+ 3− 4m = m(x− 4) + 3 ;
sostituiamo nell’equazione di C :
x2 + (m(x− 4) + 3)2 − 4x− 4(m(x− 4) + 3) + 3 = 0
⇐⇒ (1 +m2)x2 + (−8m2 + 2m− 4)x+ (16m2 − 8m) = 0 .
Calcoliamo il discriminante:
∆ = (−8m2+2m−4)2−4·(1+m2)·(16m2−8m) = . . . = 4m2+16m+16 = 4(m+2)2 ;
la condizione ∆ = 0 conduce immediatamente a m = −2. Vi e quindi una sola rettatangente, la cui ordinata all’origine e q = 3− 4m = 11 .
La tangente a C in P e quindi
r : y = −2x+ 11 .
Essa e unica dal momento che P ∈ C !
Geometria analitica (V0.2) 72 LiLu1, 2E (Luca Rovelli)

Osservazione: se P0(x0, y0) ∈ C (condizione verificabile immediatamente sostituendo lecoordinate di P0 nell’equazione cartesiana di C), allora per un punto P (x, y) sulla rettatangente a C in P0 vale
−−→P0C ⊥
−−→P0P ⇐⇒
(xC − x0yC − y0
)·(x− x0y − y0
)= 0
ove C(xC , yC) e il centro della circonferenza. Ciopermette di ricavare immediatamente l’equazionecartesiana di r !
Esempio: C : x2 + y2 − 4x− 4y + 3 = 0 , P0(4, 3) (v. pagina precedente).
Innanzitutto verifichiamo che P0 ∈ C:
42 + 32 − 4 · 4− 4 · 3 + 3 = 16 + 9− 16− 12 + 3 = 0 ;
determiniamo il centro C:
x2+y2−4x−4y+3 = (x−2)2+(y−2)2−4−4+3 = 0 ⇐⇒ (x−2)2+(y−2) = 5 .
Ora, con C(2, 2), procediamo come sopra:(xC − x0yC − y0
)·(x− 4y − 3
)= 0 ⇐⇒
(2− 42− 3
)·(x− 4y − 3
)= 0 ⇐⇒ −2(x− 4)− (y − 3) = 0
da cui segue −2x+ 8− y + 3 = 0 e quindi r : y = −2x+ 11 .
Geometria analitica (V0.2) 73 LiLu1, 2E (Luca Rovelli)