Capitolo II: Geometria analitica nello spazio -...
25
Liceo Lugano 1, 2011-2012 3N (Luca Rovelli) Capitolo II: Geometria analitica nello spazio 1. Convenzioni e idee fondamentali Grazie all’introduzione degli assi cartesiani Ox, Oy e Oz , lo spazio tridimensionale viene identificato con lo spazio cartesiano R 3 = {(x, y, z )|x, y, z ∈ R} . Ad ogni punto P dello spazio corrisponde esattamente una terna ordinata di numeri reali (x P ,y P ,z P ) (l’ascissa, l’ordinata e la quota di P ). Per indicare il punto P di coordinate x P ,y P ,z P scriveremo semplicemente P (x P ,y P ,z P ). Sia O(0, 0, 0) l’origine degli assi cartesiani, e siano I (1, 0, 0), J (0, 1, 0) e K (0, 0, 1). Allora n -→ OI, -→ OJ, --→ OK o ` e una base ortonormata orientata positivamente di V 3 (la base standard): ~ i := -→ OI = 1 0 0 , ~ j := -→ OJ = 0 1 0 , ~ k := --→ OK = 0 0 1 . x y z ~ i ~ j ~ k --→ OP P (x P ,y P ,z P ) x P y P z P Per il punto P (x P ,y P ,z P ) ∈ R 3 vale -→ OP = x P · ~ i + y P · ~ j + z P · ~ k = x P y P z P . Il vettore -→ OP ∈ V 3 ` e detto vettore luogo del punto P ∈ R 3 . Conoscere le componenti del vettore luogo di un punto P equivale a conoscere le coordinate di P . Questo approccio, che sfrutta le propriet`a dei vettori, permette una trattazione elegante e sintetica della geometria analitica. Geometria analitica (V1.0) 23 LiLu1, 3N (Luca Rovelli)
Transcript of Capitolo II: Geometria analitica nello spazio -...

Liceo Lugano 1, 2011-2012 3N (Luca Rovelli)
Capitolo II:Geometria analitica nello spazio
1. Convenzioni e idee fondamentali
Grazie all’introduzione degli assi cartesiani Ox, Oy e Oz, lo spazio tridimensionale vieneidentificato con lo spazio cartesiano
R3 = {(x, y, z)|x, y, z ∈ R} .
Ad ogni punto P dello spazio corrisponde esattamente una terna ordinata di numeri reali(xP , yP , zP ) (l’ascissa, l’ordinata e la quota di P ). Per indicare il punto P di coordinatexP , yP , zP scriveremo semplicemente P (xP , yP , zP ).
Sia O(0, 0, 0) l’origine degli assi cartesiani, e siano I(1, 0, 0), J(0, 1, 0) e K(0, 0, 1). Allora{−→OI,−→OJ,−−→OK
}e una base ortonormata orientata positivamente di V3 (la base standard):
~i :=−→OI =
100
, ~j :=−→OJ =
010
, ~k :=−−→OK =
001
.
x
y
z
~i ~j
~k −−→OP
P (xP , yP , zP )
xP
yP
zP Per il punto P (xP , yP , zP ) ∈ R3 vale
−→OP = xP ·~i+ yP ·~j + zP · ~k =
xPyPzP
.
Il vettore−→OP ∈ V3 e detto vettore luogo
del punto P ∈ R3.
Conoscere le componenti del vettore luogo di un punto P equivale a conoscere le coordinatedi P . Questo approccio, che sfrutta le proprieta dei vettori, permette una trattazioneelegante e sintetica della geometria analitica.
Geometria analitica (V1.0) 23 LiLu1, 3N (Luca Rovelli)

Risolviamo ora alcuni problemi elementari della geometria analitica con l’aiuto deivettori:
a) Dati i punti A(xA, yA, zA) e B(xB, yB, zB), scrivi il vettore−→AB in componenti:
Otteniamo immediatamente
−→AB =
−−→OB −
−→OA =
xByBzB
−xAyAzA
cioe−→AB =
xB − xAyB − yAzB − zA
.
b) Determina le coordinate del punto medio del segmento AB, con A(xA, yA, zA) eB(xB, yB, zB):
Otteniamo immediatamente
−−→OM =
−→OA+
−−→AM =
−→OA+
1
2
−→AB
=
xAyAzA
+1
2
xB − xAyB − yAzB − zA
=
12(xA + xB)
12(yA + yB)
12(zA + zB)
cioe M
(12(xA + xB), 1
2(yA + yB), 1
2(zA + zB)
)(le coordinate del punto medio sono
la media aritmetica delle coordinate degli estremi del segmento).
c) Determina la distanza |AB| tra i punti A(xA, yA, zA) e B(xB, yB, zB): si tratta evi-
dentemente del modulo del vettore−→AB, quindi
|AB| =∥∥∥−→AB∥∥∥ =
√(xB − xA)2 + (yB − yA)2 + (zB − zA)2 .
d) Dati A(xA, yA, zA), B(xB, yB, zB) e C(xC , yC , zC) determina l’ampiezza dell’angolo
(convesso) α = BAC:
Come abbiamo gia osservato, dalladefinizione di prodotto scalare segue
cosα =
−→AB ·
−→AC
‖−→AB‖ · ‖
−→AC‖
.
Geometria analitica (V1.0) 24 LiLu1, 3N (Luca Rovelli)
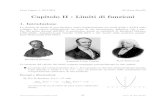
e) Determina l’area A di un triangolo ABC, dati i vertici A(xA, yA, zA), B(xB, yB, zB)e C(xC , yC , zC): l’area del triangolo misura meta dell’area di un parallelogrammo i
cui lati rappresentano−→AB e
−→AC:
A
A
BC
otteniamo
A =1
2
∥∥∥−→AB ×−→AC∥∥∥ .
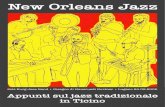
f) Determina il volume V e l’altezza h di un tetraedro ABCD: il volume e pari a 16
del volume del parallelepipedo di spigoli−→AB,−→AC,−−→AD, l’altezza (relativa alla base
ABC) e uguale all’altezza di tale parallelepipedo:
V =1
6
∣∣∣[−→AB,−→AC,−−→AD]∣∣∣ , h =
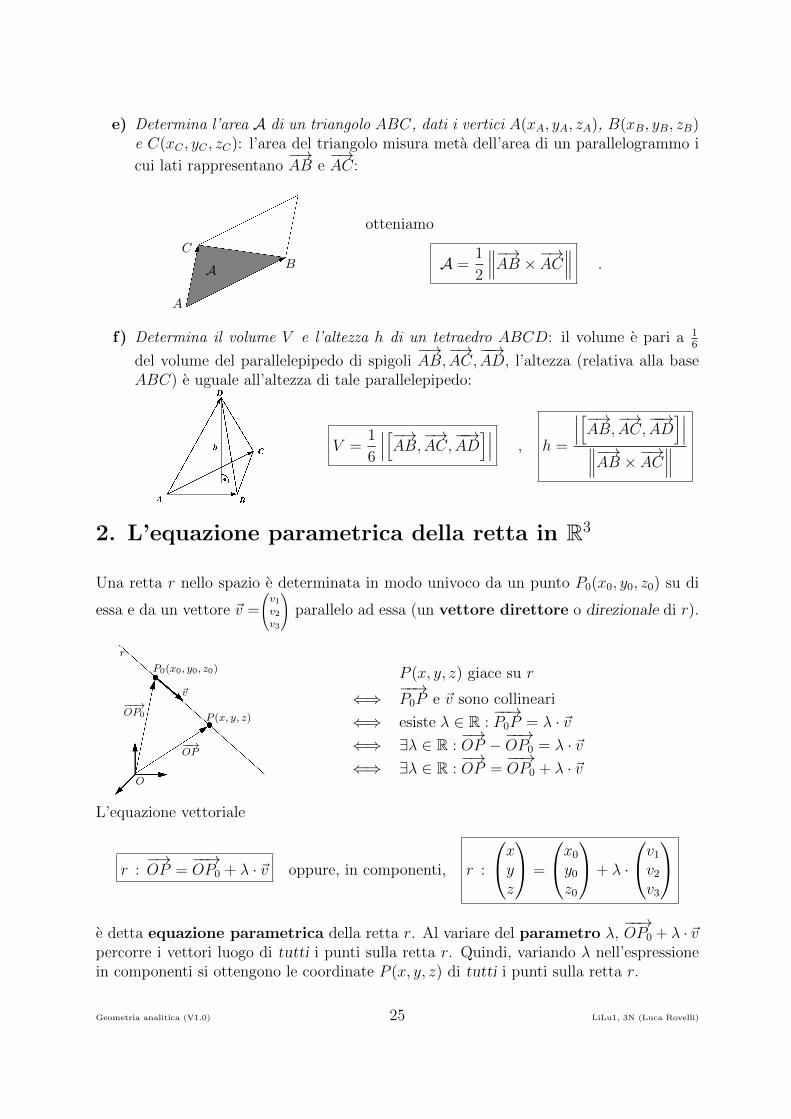
∣∣∣[−→AB,−→AC,−−→AD]∣∣∣∥∥∥−→AB ×−→AC∥∥∥2. L’equazione parametrica della retta in R3
Una retta r nello spazio e determinata in modo univoco da un punto P0(x0, y0, z0) su di
essa e da un vettore ~v =
v1v2v3
parallelo ad essa (un vettore direttore o direzionale di r).
r
P0(x0, y0, z0)
P (x, y, z)
~v
O
−−→OP0
−−→OP
P (x, y, z) giace su r
⇐⇒−−→P0P e ~v sono collineari
⇐⇒ esiste λ ∈ R :−−→P0P = λ · ~v
⇐⇒ ∃λ ∈ R :−→OP −
−−→OP0 = λ · ~v
⇐⇒ ∃λ ∈ R :−→OP =
−−→OP0 + λ · ~v
L’equazione vettoriale
r :−→OP =
−−→OP0 + λ · ~v oppure, in componenti, r :
xyz
=
x0y0z0
+ λ ·
v1v2v3
e detta equazione parametrica della retta r. Al variare del parametro λ,
−−→OP0 + λ · ~v
percorre i vettori luogo di tutti i punti sulla retta r. Quindi, variando λ nell’espressionein componenti si ottengono le coordinate P (x, y, z) di tutti i punti sulla retta r.
Geometria analitica (V1.0) 25 LiLu1, 3N (Luca Rovelli)

Un altro modo per descrivere la retta e il seguente:
r :
x = x0 + λ · v1y = y0 + λ · v2z = z0 + λ · v3
(le equazioni parametriche della retta r).
Osservazione: in R3 non e possibile eliminare il parametro λ dal sistema per ottenere unasola equazione in x, y, z. Quindi, nello spazio tridimensionale una retta non puo esseredescritta da un’unica equazione: saremo costretti ad operare con le equazioni parame-triche.
Esempi:
1) Determina un’equazione parametrica della retta r passante per A(−1, 2, 3) e parallela
al vettore ~v =
53−8
.
Possiamo scrivere immediatamente
r :
xyz
︸ ︷︷ ︸−−→OP
=
−123
︸ ︷︷ ︸−→OA
+λ ·
53−8
︸ ︷︷ ︸
~v
oppure r :
x = −1 + 5λ
y = 2 + 3λ
z = 3− 8λ
.
Osservazione: come abbiamo notato sopra, ogni scelta del parametro λ fornisce un puntodella retta; ad es. per λ = 2 si ottiene il punto P (−1+2·5, 2+2·3, 3+2·(−8)) = (9, 8,−13)e per λ = 0 si ottiene il punto A.
2) Determina un’equazione parametrica della retta s passante per A(2,−1, 3) e B(4, 5,−1).
Possiamo scegliere P0 = A(2,−1, 3) e ~v =−→AB =
26−4
, e quindi
s :
xyz
=
2−13
+ λ ·
26−4
oppure s :
x = 2 + 2λ
y = −1 + 6λ
z = 3− 4λ
.
Osservazione: l’equazione parametrica di una retta non e unica: in essa compaiono lecoordinate di un punto P0 ∈ r qualsiasi e le componenti di un vettore ~v ‖ r qualsiasi.
Ad esempio: nell’es. 2) avremmo potuto scegliere P0 = B(4, 5,−1) e dimezzare il vettore−→AB ottenendo una differente parametrizzazione della retta:
s :
xyz
=
45−1
︸ ︷︷ ︸−−→OB
+λ ·
13−2
︸ ︷︷ ︸
12
−→AB
.
Geometria analitica (V1.0) 26 LiLu1, 3N (Luca Rovelli)

Data una retta r :−→OP =
−−→OP0 + λ · ~v e un punto A(xA, yA, zA), e facile verificare se A
giace su r:
• dal punto di vista geometrico: e sufficiente controllare se i vettori ~v e−−→P0A sono
collineari;
• dal punto di vista algebrico: e sufficiente controllare se il sistema di equazionixAyAzA
=
x0y0z0
+ λ ·
v1v2v3
di tre equazioni nell’unica incognita λ e risolvibile oppure no (cioe se, isolando λnelle tre equazioni, non si ottengono contraddizioni).
Esempio: siano P (−5,−1, 6), Q(5, 4, 5) e s :
xyz
=
123
+ λ ·
42−2
.
Verifica che P ∈ s e Q 6∈ s.
Per quanto riguarda P :−5−16
=
123
+ λ ·
42−2
⇐⇒
−5 = 1 + 4λ
−1 = 2 + 2λ
6 = 3− 2λ
⇐⇒
λ = 1
4(−5− 1) = −32
λ = −12(−1− 2) = −3
2
λ = −12(6− 3) = −3
2
e quindi P ∈ s; per quanto riguarda, invece, Q:−5−16
=
123
+ λ ·
42−2
⇐⇒
5 = 1 + 4λ
4 = 2 + 2λ
5 = 3− 2λ
⇐⇒
λ = 1
λ = 1
λ = −1
e quindi Q 6∈ s.
Come abbiamo gia notato, l’equazione parametrica di una retta riduce la conoscenza di unpunto su di essa alla conoscenza del corrispondente valore del parametro λ. Cio permettea volte di riformulare un problema geometrico come un’equazione in λ.
Esempio: dati il punto Q(3, 9, 4) e la retta
r :
xyz
=
−103
+ λ ·
221
determina le coordinate di un punto P ∈ r tale che
−→PQ ⊥ r.
Geometria analitica (V1.0) 27 LiLu1, 3N (Luca Rovelli)

Sia ~v =
221
il vettore direttore di r; allora la condizione si traduce nella relazione
~v ·−→PQ = 0; dal momento che vale P (−1 + 2λ, 2λ, 3 + λ) otteniamo
−→PQ =
3− (−1 + 2λ)9− 2λ
4− (3 + λ)
=
4− 2λ9− 2λ1− λ
e quindi la condizione conduce a2
21
·4− 2λ
9− 2λ1− λ
= 0 ⇐⇒ 8− 4λ+ 18− 4λ+ 1− λ = 0 ⇐⇒ 9λ = 27
e quindi deve valere λ = 3, da cui si ricava
P (−1 + 2 · 3, 2 · 3, 3 + 3) = P (5, 6, 6) .
3. La posizione reciproca di due rette
Due rette in R3
r :−→OP =
−−→OP0 + λ · ~v e s :
−→OP =
−−→OP1 + µ · ~w
possono essere tra loro coincidenti, parallele, incidenti oppure sghembe.
• Se i vettori direttori ~v e ~w sono collineari, allora r e s sono coincidenti oppureparallele:
– le due rette coincidono (”sono la stessa retta”) se P0 giace su s oppure P1 giacesu r (ricorda che l’equazione parametrica di una retta non e unica, e quindidue equazioni parametriche diverse possono anche descrivere la stessa retta!),
– in caso contrario, quindi se P0 6∈ s oppure P1 6∈ r, le rette sono parallele.
Rette coincidenti Rette parallele
Geometria analitica (V1.0) 28 LiLu1, 3N (Luca Rovelli)

• Se ~v e ~w non sono collineari, le rette sono incidenti oppure sghembe. Per determinarela posizione reciproca di r e s possiamo studiare il sistema di tre equazioni
−−→OP0 + λ · ~v =
−−→OP1 + µ · ~w cioe, in componenti
x0 + λ · v1 = x1 + µ · w1
y0 + λ · v2 = y1 + µ · w2
z0 + λ · v3 = z1 + µ · w3
in due incognite λ, µ, con P0(x0, y0, z0), P1(x1, y1, z1), ~v =
v1v2v3
e ~w =
w1
w2
w3
;
– se il sistema possiede una una sola soluzione (λ0, µ0), le rette si intersecanoin un punto I, le cui coordinate possono essere ricavate sostituendo λ = λ0nell’equazione parametrica di r oppure µ = µ0 nell’equazione parametrica di s:
I(x0 +λ0 · v1, y0 +λ0 · v2, z0 +λ0 · v3) = I(x1 +µ0 ·w1, y1 +µ0 ·w2, z1 +µ0 ·w3);
– se il sistema non possiede soluzioni, cioe ad esempio se la soluzione (λ0, µ0)ricavata dalle prime due equazioni non soddisfa la terza, le rette non hannopunti in comune e pertanto sono sghembe.
Rette incidenti Rette sghembe
Esempi: studia la posizione reciproca delle rette r e s:
1) r :
xyz
=
2−25
+ λ ·
1−11
, s :
xyz
=
−301
+ µ ·
211
Dal momento che i vettori direttori non sono collineari, le rette sono incidenti oppuresghembe. Risolviamo quindi il sistema di equazioni
2 + λ = −3 + 2µ
−2− λ = µ
5 + λ = 1 + µ
⇐⇒
λ− 2µ = −5
−λ− µ = 2
λ− µ = −4
Sommando le prime 2 equazioni otteniamo −3µ = −3, µ = 1 e dalla secondaλ = −µ − 2 = −3. Dal momento che la soluzione (−3, 1) soddisfa anche la terzaequazione, il sistema e determinato, con S = {(−3, 1)}. Le rette sono incidenti nelpunto
I(2 + (−3),−2− (−3), 5 + (−3)) = I(−1, 1, 2) .
Geometria analitica (V1.0) 29 LiLu1, 3N (Luca Rovelli)

2) r :
xyz
=
213
+ λ ·
1−3−2
, s :
xyz
=
345
+ µ ·
−264
I vettori direttori sono collineari; pertanto, le rette sono parallele oppure coincidenti.Controlliamo se il punto P0(2, 1, 3) giace su s, risolvendo il sistema
2 = 3− 2µ
1 = 4 + 6µ
3 = 5 + 4µ
⇐⇒
µ = 1
2
µ = −12
µ = −12
Evidentemente, il sistema non ha soluzioni e quindi le rette r e s sono parallele.
3) r :
xyz
=
−451
+ λ ·
311
, s :
xyz
=
203
+ µ ·
131
Le due rette sono sghembe (verifica: per esercizio).
4. Angoli, proiezioni e distanze
Angolo tra due rette: l’angolo acuto tra due rette incidenti e definito in manieraevidente. L’angolo tra due rette sghembe r e s e definito come l’angolo tra r e una(qualsiasi) retta s′ parallela a s con r e s′ incidenti.
Rette incidenti Rette sghembe
In entrambi i casi, quindi, l’angolo tra due rette
r :−→OP =
−−→OP0 + λ · ~v e s :
−→OP =
−−→OP1 + µ · ~w :
e l’angolo acuto α tra le direzioni di ~v e ~w.Grazie alla formula per l’angolo tra due vettori ricaviamo immediatamente
cosα =|~v · ~w|‖~v‖ · ‖~w‖
Il valore assoluto garantisce che si tratti dell’angolo acuto: in effetti, per l’angolo supple-mentare ad α vale cos(π − α) = − cosα e quindi | cos(π − α)| = cosα.
In particolare, le due rette sono perpendicolari se e soltanto se ~v · ~w = 0.
Geometria analitica (V1.0) 30 LiLu1, 3N (Luca Rovelli)

Proiezione ortogonale: data una retta r :−→OP =
−−→OP0+λ~v e un punto Q(xQ, yQ, zQ) 6∈ r,
la proiezione ortogonale Q′ di Q su r e il punto Q′ ∈ r avente distanza minima da Q.
Dal momento che vale ~v ⊥−−→Q′Q, e chiaro che ~v ·
−−→Q′Q = 0.
Dato che Q′ ∈ r, deve valere−−→P0Q
′ = λ · ~v per un certoλ. Inoltre osserviamo che
−−→Q′Q =
−−→P0Q−
−−→P0Q
′ =−−→P0Q− λ · ~v .
Dalla condizione ~v ·−−→Q′Q = 0 otteniamo un’equazione per λ:
~v ·(−−→P0Q− λ · ~v
)= 0 ⇐⇒ ~v ·
−−→P0Q− λ~v · ~v︸︷︷︸
‖~v‖2= 0 ⇐⇒ λ‖~v‖2 = ~v ·
−−→P0Q
da cui ricaviamo λ =~v ·−−→P0Q
‖~v‖2. Infine sostituiamo tale valore di λ nell’equazione para-
metrica di r per ricavare le coordinate di Q′:
−−→OQ′ =
−−→OP0 +
~v ·−−→P0Q
‖~v‖2· ~v .
Esempio: determina le coordinate della proiezione ortogonale di Q(3, 2, 3) sulla retta di
equazione parametrica r :
xyz
=
123
+ λ
111
.
Con la formula appena dimostrata otteniamo
−−→OQ′ =
−−→OP0 +
~v ·−−→P0Q
‖~v‖2· ~v =
123
+
111
·3− 1
2− 23− 3
12 + 12 + 12
·
111
=
123
+2
3
111
=
5383113
e quindi Q′
(53, 83, 11
3
).
Distanza punto-retta: la distanza tra un punto Q ∈ R3 e una retta r :−→OP =
−−→OP0 +λ~v
e la distanza minima tra Q e un punto di r:
dist(Q, r) = min {|QP | | P ∈ r} .
Vediamo due modi per calcolarla:
Geometria analitica (V1.0) 31 LiLu1, 3N (Luca Rovelli)

Primo modo: la distanza tra Q e r e la distanza tra Q e la sua proiezione ortogonale Q′
su r. Conoscendo Q′, il calcolo e quindi immediato:
dist(Q, r) = |QQ′| =∥∥∥−−→QQ′∥∥∥ .
Esempio: determina la distanza tra la retta r :
xyz
=
123
+ λ
111
e il punto
Q(3, 2, 3).
Abbiamo gia ricavato le coordinate della proiezione ortogonale: Q′(53, 83, 11
3
)(v. sopra).
Quindi vale
dist(Q, r) =∥∥∥−−→QQ′∥∥∥ =
∥∥∥∥∥∥ 5
3− 3
83− 2
113− 3
∥∥∥∥∥∥ =
∥∥∥∥∥∥2
3
−211
∥∥∥∥∥∥ =2
3
√4 + 1 + 1 =
2
3
√6 .
Secondo modo: si tratta dell’altezza del parallelogrammo avente lati ~v e−−→P0Q rispetto
alla base ~v:
L’area di tale parallelogrammo misura ‖~v ×−−→P0Q‖.
Quindi
dist(Q, r) =‖~v ×
−−→P0Q‖‖~v‖
.
Esempio: (v. sopra) r :
xyz
=
123
+ λ
111
, Q(3, 2, 3).
Calcoliamo
dist(Q, r) =‖~v ×
−−→P0Q‖‖~v‖
=
∥∥∥∥∥∥1
11
×3− 1
2− 23− 3
∥∥∥∥∥∥∥∥∥∥∥∥1
11
∥∥∥∥∥∥=
∥∥∥∥∥∥ 0
2−2
∥∥∥∥∥∥∥∥∥∥∥∥1
11
∥∥∥∥∥∥=
√8√3
=2
3
√6 .
Geometria analitica (V1.0) 32 LiLu1, 3N (Luca Rovelli)

Distanza tra due rette r e s: si tratta della distanza minima tra un punto di r e unpunto di s, cioe
dist(r, s) = min {|PQ| | P ∈ r,Q ∈ s} .
Osservazione: se r ‖ s, dist(r, s) e la distanza tra r e un punto qualsiasi di s (oppuretra s e un punto qualsiasi di r).
Supponiamo ora che r :−→OP =
−−→OP0 + λ~v e s :
−→OP =
−−→OP1 + µ~w non siano parallele.
Allora, dist(r, s) e uguale alla distanza tra il piano parallelo a r e contenente s e il pianoparallelo a s contenente r. Si tratta dell’altezza del parallelepipedo avente spigoli ~v, ~w e−−→P0P1 rispetto alla faccia avente ~v e ~w come lati.
La distanza d e pari al quoziente tra il volume el’area di base del parallelepipedo:
dist(r, s) =
∣∣∣[−−→P0P1, ~v, ~w]∣∣∣
‖~v × ~w‖.
5. L’equazione parametrica del piano in R3
Un piano α nello spazio tridimensionale e determinato in maniera univoca da un punto
P0(x0, y0, z0) su di esso e da due vettori ~v =
v1v2v3
e ~w =
w1
w2
w3
non collineari ad esso paralleli.
α
P0(x0, y0, z0)
P (x, y, z)
~v
~w
O(0, 0, 0)
−−→OP0
−−→OP
P (x, y, z) giace sul piano α
⇐⇒−−→P0P , ~v e ~w sono complanari
⇐⇒ ∃λ, µ ∈ R :−−→P0P = λ · ~v + µ · ~w
⇐⇒ ∃λ, µ ∈ R :−→OP −
−−→OP0 = λ · ~v + µ · ~w
⇐⇒ ∃λ, µ ∈ R :−→OP =
−−→OP0 + λ · ~v + µ · ~w
L’equazione
α :−→OP =
−−→OP0 + λ · ~v + µ · ~w risp. α :
xyz
=
x0y0z0
+ λ ·
v1v2v3
+ µ ·
w1
w2
w3
e l’equazione parametrica (vettoriale) del piano α. Al variare dei parametri λ e µ,−−→OP0 + λ · ~v + µ · ~w percorre i vettori luogo di tutti i punti di α. Quindi, variando λ eµ nell’espressione in componenti si ottengono le coordinate P (x, y, z) di tutti i punti sulpiano α.
Geometria analitica (V1.0) 33 LiLu1, 3N (Luca Rovelli)

Un altro modo per descrivere il piano e il seguente:
α :
x = x0 + λ · v1 + µ · w1
y = y0 + λ · v2 + µ · w2
z = z0 + λ · v3 + µ · w3
(le equazioni parametriche del piano α).
Esempio: determina l’equazione parametrica del piano passante per i punti A(3, 0, 6),B(6,−6,−4) e C(8, 4, 8).
Possiamo scegliere P0 = A, ~v =−→AB =
3−6−10
e ~w =−→AC =
542
, ottenendo
α :
xyz
︸ ︷︷ ︸−−→OP
=
306
︸ ︷︷ ︸−−→OP0
+λ ·
3−6−10
︸ ︷︷ ︸
~v
+µ ·
542
︸ ︷︷ ︸
~w
oppure α :
x = 3 + 3λ+ 5µ
y = −6λ+ 4µ
z = 6− 10λ+ 2µ
.
Osservazioni:
(i) Come abbiamo menzionato in precedenza, ogni scelta dei parametri λ e µ fornisceun punto del piano. Nell’esempio appena svolto, con λ = 1 e µ = −1 ricaviamo ilpunto
P (3 + 3 · 1 + 5 · (−1),−6 · 1 + 4 · (−1), 6− 10 · 1 + 2 · (−1)) = P (1,−10,−6)
del piano α.
(ii) come gia per la retta, l’equazione parametrica di un piano non e unica, dal momentoche la sua forma dipende dalla scelta di P0, ~v e ~w.
6. L’equazione cartesiana del piano in R3
Eliminando i parametri λ e µ dal sistema di equazioni
α :
x = x0 + λ · v1 + µ · w1
y = y0 + λ · v2 + µ · w2
z = z0 + λ · v3 + µ · w3
si ottiene una sola equazione in x, y, z che puo essere scritta nella forma
α : ax+ by + cz + d = 0
con a, b, c, d ∈ R, l’equazione cartesiana del piano.
Geometria analitica (V1.0) 34 LiLu1, 3N (Luca Rovelli)

Esempio: determina l’equazione cartesiana del piano passante per i punti A(3, 0, 6),B(6,−6,−4) e C(8, 4, 8).Abbiamo gia ricavato le equazioni parametriche di α (v. pag 34):
α :
x = 3 + 3λ+ 5µ
y = −6λ+ 4µ
z = 6− 10λ+ 2µ
;
dalla prima equazione ricaviamo λ = 13(x−3−5µ). Sostituendo nelle 2 equazioni rimanenti
otteniamo {y = −2x+ 6 + 14µ
z = 16− 103x+ 56
3µ
⇐⇒
{µ = 1
14(2x+ y − 6)
µ = 356
(103x+ z − 16
)e uguagliando le due espressioni per µ:
1
14(2x+ y − 6) =
3
56
(10
3x+ z − 16
)⇐⇒ 2x− 4y + 3z − 24 = 0 .
L’equazione cartesiana cercata e quindi α : 2x− 4y + 3z − 24 = 0.
Osservazione: l’equazione cartesiana rappresenta una condizione per l’appartenenza diun punto P (x, y, z) al piano. Ad esempio, il punto P (1,−10,−6) (prodotto a pag. 34)giace nel piano α studiato sopra perche le sue coordinate soddisfano l’equazione cartesiana:
2 · 1− 4 · (−10) + 3 · (−6) + 24 = 2 + 40− 18− 24 = 0 ,
mentre il punto P (1, 2, 3) non giace in α:
2 · 1− 4 · 2 + 3 · 3− 24 = 2− 8 + 9− 24 = −21 6= 0 .
Un altro modo per ricavare l’equazione cartesiana di un piano α conoscendo un punto
P0(x0, y0, z0) su di esso e due vettori non collineari ~v =
v1v2v3
e ~w =
w1
w2
w3
ad esso paralleli
e il seguente: sappiamo che
P (x, y, z) giace sul piano α
⇐⇒−−→P0P , ~v e ~w sono linearmente dipendenti
⇐⇒[−−→P0P ,~v, ~w
]= 0
⇐⇒
∣∣∣∣∣∣x− x0 v1 w1
y − y0 v2 w2
z − z0 v3 w3
∣∣∣∣∣∣ = 0 .
L’equazione cartesiana del piano α puo quindi essere ricavata con l’aiuto di un determi-nante:
α :
∣∣∣∣∣∣x− x0 v1 w1
y − y0 v2 w2
z − z0 v3 w3
∣∣∣∣∣∣ = 0 .
Geometria analitica (V1.0) 35 LiLu1, 3N (Luca Rovelli)

Esempio (v. sopra): determina l’equazione cartesiana del piano passante per il punto
A(3, 0, 6), e parallelo ai vettori ~v =
3−6−10
e ~w =
542
.
Calcoliamo il determinante:∣∣∣∣∣∣x− x0 v1 w1
y − y0 v2 w2
z − z0 v3 w3
∣∣∣∣∣∣ =
∣∣∣∣∣∣x− 3 3 5y − 0 −6 4z − 6 −10 2
∣∣∣∣∣∣ = . . . = 28x− 56y + 42z − 336 .
L’equazione cartesiana cercata puo essere scritta nella forma
α : 28x− 56y + 42z − 336 = 0
oppure, dividendo per 14,
α : 2x− 4y + 3z − 24 = 0 .
Osservazione: dati 3 punti A(xA, yA, zA), B(xB, yB, zB), C(xC , yC , zC) giacenti su unpiano α, l’equazione cartesiana α : ax+ by + cz + d = 0 puo anche essere ottenuta graziea considerazioni puramente algebriche: sapendo che le coordinate dei 3 punti devono sod-disfare l’equazione, e che a, b, c, d sono determinati a meno di una costante moltiplicativa1,possiamo porre ad esempio d = −1 e ottenere un sistema di equazioni in a, b, c
xA · a+ yA · b+ zA · c = 1
xB · a+ yB · b+ zB · c = 1
xC · a+ yC · b+ zC · c = 1
Esempio (v. sopra): siano A(3, 0, 6), B(6,−6,−4) e C(8, 4, 8).Otteniamo il sistema di equazioni
3a+ 6c = 1
6a− 6b− 4c = 1
8a+ 4b+ 8c = 1
la cui soluzione e (a, b, c) =(
112,−1
6, 18
).
L’equazione cartesiana ottenuta e α : 112x − 1
6y + 1
8z − 1 = 0. Moltiplicando per 24
otteniamo di nuovoα : 2x− 4y + 3z − 24 = 0 .
1cioe: moltiplicando entrambi i termini dell’equazione per una costante non nulla, essa rimane validaper i medesimi punti
Geometria analitica (V1.0) 36 LiLu1, 3N (Luca Rovelli)

7. La direzione normale ad un piano
Un piano α in R3 puo anche essere determinato in modo univoco da un punto su di essoe da una direzione perpendicolare (o normale) ad α. Per ricavare l’equazione cartesiana
di α si procede come segue: siano P0(x0, y0, z0) ∈ α e ~n =
abc
⊥ α;
α
P0(x0, y0, z0)P (x, y, z)
~n
O(0, 0, 0)
P (x, y, z) giace sul piano α
⇐⇒ ~n ⊥−−→P0P , cioe ~n ·
−−→P0P = 0
⇐⇒
abc
·x− x0y − y0z − z0
= 0
⇐⇒ ax+ by + cz−(ax0 + by0 + cz0)︸ ︷︷ ︸d
= 0
Ponendo d := −(ax0 + by0 + cz0) = −~n ·−−→OP0, otteniamo un’equazione cartesiana
α : ax+ by + cz + d = 0 .
Esempio: determina un’equazione cartesiana del piano α passante per P (−1, 0, 3) e per-
pendicolare a ~n =
112
.
Possiamo scrivere immediatamente
α :
112
·x+ 1y − 0z − 3
= 0 cioe α : x+ y + 2z − 5 = 0 .
Applicazioni del vettore normale:
a) Ogni vettore collineare a ~n =
abc
e perpendicolare al piano α : ax+ by+ cz+ d = 0.
b) Angolo acuto ∠(α, β) tra due piani α e β:
Il disegno in sezione mostra che l’angoloacuto φ = ∠(α, β) e uguale all’angolo acutotra i rispettivi vettori normali ~nα e ~nβ; valequindi
cosφ =|~nα · ~nβ|‖~nα‖ · ‖~nβ‖
Esempio: determina l’angolo acuto tra i piani α : 2x−y+3 = 0 e β : x+y−6z = 0.
I vettori normali sono ~nα =
2−10
e ~nβ =
11−6
. Vale quindi
cosφ =|~nα · ~nβ|‖~nα‖ · ‖~nβ‖
=|2− 1|√5 ·√
38=
1√190
, φ = arccos
(1√190
)∼= 85, 84◦ .
Geometria analitica (V1.0) 37 LiLu1, 3N (Luca Rovelli)

c) Condizione di parallelismo tra due piani
α : ax+ by + cz + d = 0 e β : a′x+ b′y + c′z + d′ = 0 :
i piani sono paralleli se e soltanto se i rispettivi vettori normali ~nα e ~nβ sonocollineari, cioe se esiste k ∈ R con
a′ = k · a , b′ = k · b , c′ = k · c .
Nota che, se inoltre vale d′ = k · d, le equazioni di α e β sono equivalenti e quindi ipiani α e β coincidono.
Esempio: i piani
α :1
2x+
1
3y − 1
6z + 3 = 0 e β : 3x+ 2y − z + 5 = 0
sono paralleli, mentre i piani
γ :1
2x− 1
2y +
1
4z + 3 = 0 e δ : 2x− 2y + z + 12 = 0
sono coincidenti.
d) Angolo acuto ∠(α, r) tra una retta r e un piano α:
Il disegno in sezione mostra che l’angoloacuto ψ = ∠(α, r) e complementareall’angolo acuto φ = ∠(~n, r) tra la retta re il vettore ~n normale ad α, cioe
∠(α, r) + ∠(~n, r) = 90◦ .
Esempio: determina l’angolo acuto tra la retta r :
xyz
= λ
1−23
e il piano α :
2x+ 3y − z = 0.
Calcoliamo immediatamente l’angolo tra r e il vettore normale a α:
∠(~n, r) = arccos|~v · ~n|‖~v‖ · ‖~n‖
= arccos
∣∣∣∣∣∣ 1−23
· 2
3−1
∣∣∣∣∣∣√
14 ·√
14= arccos
1
2= 60◦
ed otteniamo quindi ∠(α, r) = 90◦ − ∠(~n, r) = 30◦.
Geometria analitica (V1.0) 38 LiLu1, 3N (Luca Rovelli)

e) Un ulteriore modo per determinare l’equazione cartesiana di un piano α conoscendo
un punto P0(x0, y0, z0) su di esso e due vettori non collineari ~v =
v1v2v3
e ~w =
w1
w2
w3
ad
esso paralleli: α e il piano passante per P0 e perpendicolare al vettore ~n = ~v × ~w.
Esempio: (v. pag. 36): determina l’equazione cartesiana del piano passante per il
punto A(3, 0, 6), e parallelo ai vettori ~v =
3−6−10
e ~w =
542
.
Calcoliamo
~n = ~v × ~w =
3−6−10
×5
42
=
28−5642
= 14
2−43
.
Quindi
~n ·−→AP = 0 ⇐⇒
2−43
·x− 3
yz − 6
= 0 ⇐⇒ 2x− 4y + 3z − 24 = 0 .
L’equazione del piano e α : 2x− 4y + 3z − 24 = 0.
f) Distanza punto-piano: dati un punto P (xP , yP , zP ) e un piano
α :−→OP =
−−→OP0 + λ~v + µ~w ,
possiamo sfruttare il fatto che la distanza dist(P, α) e pari all’altezza di un paral-
lelepipedo di spigoli ~v, ~w e−−→P0P .
La distanza puo pertanto essere ot-tenuta come quoziente tra volume earea di base:
h = dist(P, α) =
∣∣∣[−−→P0P ,~v, ~w]∣∣∣
‖~v × ~w‖ ~v
~w
P0
P
h
α
Dalla definizione di prodotto misto, tenendo conto del fatto che ~n = ~v× ~w e normalead α, ricaviamo∣∣∣[−−→P0P ,~v, ~w
]∣∣∣‖~v × ~w‖
=
∣∣∣−−→P0P · (~v × ~w)∣∣∣
‖~v × ~w‖=
∣∣∣−−→P0P · ~n∣∣∣
‖~n‖=
∣∣∣(−−→OP −−−→OP0
)· ~n∣∣∣
‖~n‖=
∣∣∣−−→OP · ~n−−−→OP0 · ~n∣∣∣
‖~n‖.
Come abbiamo gia notato (pag. 37), se l’equazione cartesiana del piano e data da
α : ax+ by + cz + d = 0 vale ~n =
abc
,−−→OP0 · ~n = −d e
−→OP · ~n =
xPyPzP
·abc
= axP + byP + czP .
Geometria analitica (V1.0) 39 LiLu1, 3N (Luca Rovelli)

Abbiamo quindi dimostrato che la distanza tra il punto P (xP , yP , zP ) e il pianoα : ax+ by + cz + d = 0 e data dalla formula
dist(P, α) =|a · xP + b · yP + c · zP + d|√
a2 + b2 + c2.
Esempio: determina dist(A,α) con A(5, 1,−1) e α : x− 2y − 2z + 4 = 0.
Ricaviamo immediatamente
dist(A,α) =|5− 2 · 1− 2 · (−1) + 4|√
12 + (−2)2 + (−2)2=
9
3= 3 .
8. Intersezione tra 2 piani
Sianoα : ax+ by + cz + d = 0 e β : a′x+ b′y + c′z + d′ = 0
due piani in R3. Nel paragrafo precedente (pag. 38) abbiamo gia chiarito a quali condizioniα e β sono paralleli oppure coincidenti. Supponiamo ora che α e β non siano ne paralleli,ne coincidenti. Allora la loro intersezione e una retta r = α∩β; per ricavarne un’equazioneparametrica e sufficiente conoscere due punti dell’intersezione.
Per ricavare un punto dell’intersezione α ∩ β e sufficiente scegliere a caso il valore di unadelle tre variabili x, y, z, ottenendo un sistema di equazioni per le altre due2.
Esempio: determina la retta d’intersezione dei piani
α : x− 2y + 2z − 1 = 0 e β : 2x− 3y − z + 2 = 0 .
Dapprima scelgo z = 0, vado cioe alla ricerca del punto di quota 0 su r (la prima tracciadi r); ottengo il sistema {
x− 2y − 1 = 0
2x− 3y + 2 = 0
Sottraendo la II equazione dal doppio della I ottengo −y − 4 = 0, e quindi y = −4,x = 2y + 1 = −7. Il primo punto e quindi Q(−7,−4, 0).
Analogamente, scegliendo x = 1 ricavo il punto R(1, 1, 1). Un’equazione della retta
r = QR = α ∩ β e r :−→OP =
−→OQ+ λ ·
−→QR, cioe
r :
xyz
=
111
+ λ ·
851
.
2geometricamente, cio significa intersecare i 2 piani con un terzo piano parallelo a Oxy, Oxz oppureOyz
Geometria analitica (V1.0) 40 LiLu1, 3N (Luca Rovelli)

Osservazione: la retta r = α ∩ β e ortogonale ai vettori normali ~nα e ~nβ. Quindi,~nα × ~nβ e un vettore direttore per r; anche questo fatto puo essere sfruttato per ricavareun’equazione per r.
Esempio. (v. sopra) con ~nα =
1−22
e ~nβ =
2−3−1
otteniamo
~v = ~nα × ~nβ =
1−22
× 2−3−1
=
851
;
conoscendo inoltre un punto di r (ricavabile come sopra) possiamo scrivere un’equazioneparametrica.
9. Intersezione retta/piano
Siano α un piano e r una retta, dati come segue:
α : ax+ by + cz + d = 0 risp. r :
xyz
=
x0y0z0
+ λ ·
v1v2v3
.
Sostituendo le tre equazioni x = x0 + λ · v1y = y0 + λ · v2z = z0 + λ · v3
nell’equazione di α si ottiene un’equazione nell’incognita λ; sia S l’insieme delle suesoluzioni;
• se S = ∅, nessun valore di λ permette di produrre un punto di α con l’equazioneparametrica di r e pertanto r ∩ α = ∅ : la retta r e il piano α sono paralleli (cioe:r giace su un piano parallelo a α).
• se S = R, cioe r ∩ α = r, l’equazione parametrica di r produce un punto di α perogni valore di λ. La retta r giace quindi nel piano α.
• se S = {λ0} per un certo λ0 ∈ R, vale r ∩ α = {P0} dove P0 e il punto su rcorrispondente a λ0 (cioe il punto ottenuto sostituendo λ = λ0 nell’equazione di r).
r ‖ α r ⊆ α
r ∩ α = {P0}
Geometria analitica (V1.0) 41 LiLu1, 3N (Luca Rovelli)

Esempio: determina α ∩ r, con
α : 2x− 2y − z + 17 = 0 risp. r :
xyz
=
763
+ λ ·
2−1−2
.
Sostituendo, ottengo l’equazione
2(7 + 2λ)− 2(6− λ)− (3− 2λ) + 17 = 0 ⇐⇒ 8λ+ 16 = 0 ⇐⇒ λ = −2 ;
quindi S = {−2} e il punto d’intersezione e
P0(7 + 2 · (−2), 6 + (−1) · (−2), 3 + (−2) · (−2)) = P0(3, 8, 7) .
10. L’equazione cartesiana della sfera
Una sfera S nello spazio tridimensionale R3 e definita univocamente dal suo centroC(xC , yC , zC) e dalla misura r > 0 del suo raggio.
C(xC , yC , zC)
P (x, y, z)S
r P (x, y, z) giace sulla sfera S di centro C e raggio r
⇐⇒ |CP | = r
⇐⇒ |CP |2 = r2
⇐⇒ (x− xC)2 + (y − yC)2 + (z − zC)2 = r2
L’equazione
S : (x− xC)2 + (y − yC)2 + (z − zC)2 = R2 (1)
e l’equazione cartesiana della sfera S. Essa puo anche essere riscritta nella forma
S : x2 + y2 + z2 + ax+ by + cz + d = 0 (2)
con a, b, c ∈ R.
Esempio: determina l’equazione cartesiana della sfera S con C(1,−3, 5) e r = 7.
OtteniamoS : (x− 1)2 + (y + 3)2 + (z − 5)2 = 49 ,
oppure ancheS : x2 + y2 + z2 − 2x+ 6y − 10z − 14 = 0 .
Se la sfera e descritta da un’equazione del tipo (2), e sempre possibile determinarne centroe raggio: il completamento dei quadrati permette infatti di risalire ad un’equazione deltipo (1), in cui C e r sono immediatamente leggibili.
Geometria analitica (V1.0) 42 LiLu1, 3N (Luca Rovelli)

Esempio: determina centro e raggio della sfera di equazione
x2 + y2 + z2 − 2x+ 8y − 4z − 4 = 0 .
Completando il quadrato otteniamo
x2 − 2x+ y2 + 8y + z2 − 4z − 4 = 0
⇐⇒ (x− 1)2 − 1 + (y + 4)2 − 16 + (z − 2)2 − 4− 4 = 0
⇐⇒ (x− 1)2 + (y + 4)2 + (z − 2)2 = 25
Quindi: centro C(1,−4, 2), raggio r = 5.
11. Il piano tangente ad una sfera
Sia S una sfera di centro C, e P0(x0, y0, z0) un punto della sfera. Allora, il piano tangente
alla sfera nel punto P0 e il piano per P0 perpendicolare al vettore−−→CP0:
P (x, y, z) giace sul piano α tangente a S in P0
⇐⇒ CP0 ⊥ P0P
⇐⇒−−→CP0 ·
−−→P0P = 0
In altre parole, ~n =−−→CP0 e il vettore normale al piano tangente.
Esempio: determina un’equazione cartesiana del piano tangente alla sfera S di centroC(1,−2, 3) e raggio r = 3 nel punto P0(3, 0, z) con z minimo.
Determiniamo innanzitutto l’equazione cartesiana della sfera:
S : (x− 1)2 + (x+ 2)2 + (x− 3)2 = 9 ,
e ricaviamo la quota di P0: con x = 3 e y = 0 otteniamo
(3− 1)2 + (0 + 2)2 + (z − 3)2 = 9 ⇐⇒ (z − 3)2 = 1 ⇐⇒ z − 3 = ±1
e quindi z = 4 oppure z = 2; dato che z dev’essere minimo, e quest’ultima la quotacercata: P0(3, 0, 2). Ricaviamo l’equazione del piano tangente α:
−−→CP0 ·
−−→P0P = 0 ⇐⇒
3− 10 + 22− 3
·x− 3y − 0z − 2
= 0 ⇐⇒ 2(x− 3) + 2y − (z − 2) = 0
e quindi l’equazione cartesiana cercata e α : 2x+ 2y − z − 4 = 0.
Geometria analitica (V1.0) 43 LiLu1, 3N (Luca Rovelli)

12. Intersezioni
Intersezione sfera/retta: siano
S : x2 + y2 + z2 + ax+ by + cz + d = 0 e r :
x = x0 + λ · v1y = y0 + λ · v2z = z0 + λ · v3
una sfera risp. una retta in R3. Sostituendo le equazioni parametriche della rettanell’equazione della sfera otteniamo un’equazione quadratica per λ, le cui soluzioni cipermettono di ricavare i punti d’intersezione.
Esempio: determina i punti d’intersezione tra la retta
r :
xyz
=
457
+ λ ·
325
e la sfera S di centro O e raggio
√14.
L’equazione della sfera e S : x2 + y2 + z2 = 14; sostituendo, ricaviamo l’equazione
(4+3λ)2+(5+2λ)2+(7+5λ)2 = 14 ⇐⇒ λ2+3λ+2 = 0 ⇐⇒ (λ+2)(λ+1) = 0
le cui soluzioni sono λ = −2 e λ = −1, a cui corrispondono i punti d’intersezioneI1(−2, 1,−3) e I2(1, 3, 2).
Osservazione: il discriminante ∆ dell’equazione quadratica permette di stabilire se laretta interseca la sfera in 2 punti (2 soluzioni, ∆ > 0), e tangente (∆ = 0) oppure noninterseca la sfera (∆ < 0).
Intersezione sfera/piano: siano
S : x2 + y2 + z2 + ax+ by + cz + d = 0 e α : Ax+By + Cz +D = 0
una sfera (raggio R, centro C) risp. un piano in R3. Sia inoltre d = dist(C, α) la distanzatra il punto C e il piano α. Per la posizione reciproca di S e α ci sono tre possibilita:
• se d > R , la sfera S e il piano α non si intersecano;
• se d = R , il piano α e tangente alla sfera nel punto P , che puo essere ottenutointersecando α con la retta perpendicolare ad α passante per C.
• se d < R , l’intersezione S ∩ α e una circonferenza di raggio r =√R2 − d2, il
cui centro C0 puo essere ottenuto intersecando α con la retta perpendicolare ad αpassante per C.
Geometria analitica (V1.0) 44 LiLu1, 3N (Luca Rovelli)

Disegno in sezione della situazione:
Esempi: studia la posizione reciproca della sfera
S : x2 + y2 + z2 − 4x− 4y − 4z − 88 = 0
e del piano α, con
1) α : 3x+ 4y + 36 = 0 ;
2) α : 8x+ 5y + 4z − 139 = 0 ;
3) α : x+ y + 2z − 26 = 0 .
Determiniamo dapprima centro e raggio della sfera:
x2 + y2 + z2 − 4x− 4y − 4z − 88 = 0
⇐⇒ (x− 2)2 − 4 + (y − 2)2 − 4 + (z − 2)2 − 4− 88 = 0
⇐⇒ (x− 2)2 + (y − 2)2 + (z − 2)2 = 102
quindi: raggio R = 10, centro C(2, 2, 2).
1) Determiniamo la distanza tra C e il piano α: d =|3 · 2 + 4 · 2 + 36|√
32 + 42=
50
5= 10 .
Quindi: d = R, e il piano e tangente alla sfera. Determiniamo il punto di tangenzaintersecando α con la retta
t :
xyz
=
222
+ λ
340
passante per C e perpendicolare ad α. Sostituendo nell’equazione di α ricaviamo
3(2 + 3λ) + 4(2 + 4λ) + 36 = 0 ⇐⇒ 25λ+ 50 = 0 ⇐⇒ λ = −2 .
Sostituendo λ = −2 nell’equazione parametrica di r, concludiamo che la sfera S eil piano α sono tangenti nel punto P (−4,−6, 2).
Geometria analitica (V1.0) 45 LiLu1, 3N (Luca Rovelli)

2) Determiniamo la distanza tra C e α: d =|8 · 2 + 5 · 2 + 4 · 2− 139|√
82 + 52 + 42=√
105 .
Quindi: d > R, e il piano e la sfera non si intersecano.
3) Determiniamo la distanza tra C e α: d =|2 + 2 + 2 · 2− 26|√
12 + 12 + 22= 3√
6 . Quindi:
d < R, e il piano e la sfera si intersecano in una circonferenza. Il raggio di talecirconferenza misura r =
√R2 − d2 =
√100− 54 =
√46 unita. Determiniamo il
centro C0 intersecando α con la retta
t :
xyz
=
222
+ λ
112
passante per C e perpendicolare ad α. Sostituendo nell’equazione di α ricaviamo
(2 + λ) + (2 + λ) + 2(2 + 2λ)− 26 = 0 ⇐⇒ 6λ− 18 = 0 ⇐⇒ λ = 3 .
Sostituendo λ = 3 nell’equazione parametrica di r concludiamo che la sfera S e ilpiano α si intersecano in una circonferenza di centro C0(5, 5, 8) e raggio r =
√46
unita.
Intersezione sfera/sfera: siano
S1 : x2 + y2 + z2 + a1x+ b1y + c1z + d1 = 0
S2 : x2 + y2 + z2 + a2x+ b2y + c2z + d2 = 0
due sfere in R3 di raggio r1 risp. r2. Sia d = |C1C2| la distanza tra i centri C1 di S1 e C2
di S2. Per la posizione reciproca di S1 e S2 ci sono le seguenti possibilita:
• se d > r1 + r2 , le sfere non si intersecano, e sono esterne una all’altra;
• se d = r1 + r2 , le sfere sono tangenti esternamente; per determinare il punto ditangenza si puo intersecare una delle due sfere con la retta C1C2;
• se |r1 − r2| < d < r1 + r2 , le sfere si intersecano in una circonferenza; per deter-
minarne centro e raggio possiamo procedere come segue: sottraendo un’equazionedall’altra si ottiene l’equazione cartesiana
α : (a1 − a2)x+ (b1 − b2)y + (c1 − c2)z + (d1 − d2) = 0
del piano contenente tale circonferenza; a questo punto si puo intersecare α con S1oppure S2;
• se d = |r1 − r2| , le sfere sono tangenti internamente; per determinare il punto di
tangenza si puo (come sopra) intersecare una delle due sfere con la retta C1C2;
• se d < |r1 − r2| , le sfere sono una interna all’altra.
Geometria analitica (V1.0) 46 LiLu1, 3N (Luca Rovelli)

Disegno in sezione della situazione:
d < |r1 − r2|d = |r1 − r2||r1 − r2| < d < r1 + r2d = r1 + r2d > r1 + r2
Esempi: studia la posizione reciproca delle sfere S1 e S2:
1) S1 : x2 + y2 + z2 − 4x+ 6y − 23 = 0, S2 : x2 + y2 + z2 − 2x+ 2z − 2 = 0;
2) S1 : x2 +y2 +z2−14x−14y−24z+172 = 0, S2 : x2 +y2 +z2−4x−4y−4z−88 = 0.
Soluzioni:
1) Determiniamo i centri e i raggi: completando i quadrati ricaviamo
S1 : (x− 2)2 + (y + 3)2 + (z − 0)2 = 62
S2 : (x− 1)2 + (y − 0)2 + (z + 1)2 = 22
Quindi: centri C1(2,−3, 0) e C2(1, 0,−1), raggi r1 = 6, r2 = 4. La distanza tra i 2centri e pari a
d =√
(1− 2)2 + (0 + 3)2 + (−1− 0)2 =√
11
e quindi vale√
11 = d < |r1 − r2| = 4: la sfera S2 e interna alla sfera S1.
2) Determiniamo i centri e i raggi: completando i quadrati ricaviamo
S1 : (x− 7)2 + (y − 7)2 + (z − 12)2 = 70
S2 : (x− 2)2 + (y − 2)2 + (z − 2)2 = 102
Quindi: centri C1(7, 7, 12) e C2(2, 2, 2), raggi r1 =√
70, r2 = 10. La distanza tra i2 centri e pari a
d =√
(7− 2)2 + (7− 2)2 + (12− 2)2 = 5√
6
e quindi vale |r1 − r2|︸ ︷︷ ︸10−√70
< d︸︷︷︸5√6
< r1 + r2︸ ︷︷ ︸10+√70
: le sfere si intersecano quindi in una circon-
ferenza. Calcolando la differenza tra le equazioni delle sfere ricaviamo l’equazionecartesiana del piano contenente l’intersezione:
(x2 + y2 + z2 − 14x− 14y − 24z + 172)− (x2 + y2 + z2 − 4x− 4y − 4z − 88) = 0
⇐⇒ −10x− 10y − 20z + 260 = 0 ⇐⇒ x+ y + 2z − 26 = 0
Quindi il piano cercato e α : x + y + 2z − 26 = 0. Abbiamo gia intersecato talepiano con la sfera S2 in precedenza (pag. 46), ottenendo una circonferenza di centroC0(5, 5, 8) e raggio r =
√46.
Geometria analitica (V1.0) 47 LiLu1, 3N (Luca Rovelli)