
Capitolo I: Complementi di geometria...
19
Liceo Lugano 1, 2012-2013 3E (Luca Rovelli) Capitolo I: Complementi di geometria vettoriale 1. Vettori geometrici in V 3 Dal momento che i concetti fondamentali sono gi` a stati approfonditi nel piano, ci limi- tiamo a fornire un rapido elenco delle nozioni pi` u importanti. Una coppia ordinata (P, Q) di punti dello spazio determina un segmento orientato dello spazio, indicato con -→ PQ. Di un segmento orientato -→ PQ si definiscono il modulo k -→ PQk (la distanza tra i punti P e Q), la direzione (cio` e la direzione della retta PQ) e il senso o verso (“dal punto P verso il punto Q”). Se P = Q, il segmento orientato -→ PP ` e un segmento nullo. Due segmenti orientati -→ PQ e -→ RS sono detti equipollenti se possiedono lo stesso modulo (sono cio` e isometrici), la stessa direzione (sono collineari) e lo stesso verso (sono equi- orientati). In questo caso, scriveremo semplicemente -→ PQ = -→ RS . L’insieme (o, meglio, la classe) di tutti i segmenti orientati equipollenti ad un dato segmento ` e un vettore geometrico dello spazio. Indichiamo i vettori geometrici con lettere minuscole (~u, ~v, ~ w ecc.) e con V 3 l’insieme dei vettori geometrici dello spazio. La classe contenente tutti i segmenti nulli ` e detta vettore nullo, e si indica con ~o. Un segmento orientato -→ PQ nella classe ~v ` e un rappresentante del vettore geometrico ~v. In questo caso, scriveremo semplicemente ~v = -→ PQ. Il modulo di un vettore ~v ` e il modulo di un suo rappresentante (qualsiasi!); direzione e verso si definiscono in maniera analoga. Geometria vettoriale 2, corso normale (V0.4) 1 LiLu1, 3E (Luca Rovelli)
Transcript of Capitolo I: Complementi di geometria...
Liceo Lugano 1, 2012-2013 3E (Luca Rovelli)
Capitolo I:Complementi di geometria vettoriale
1. Vettori geometrici in V3
Dal momento che i concetti fondamentali sono gia stati approfonditi nel piano, ci limi-tiamo a fornire un rapido elenco delle nozioni piu importanti.
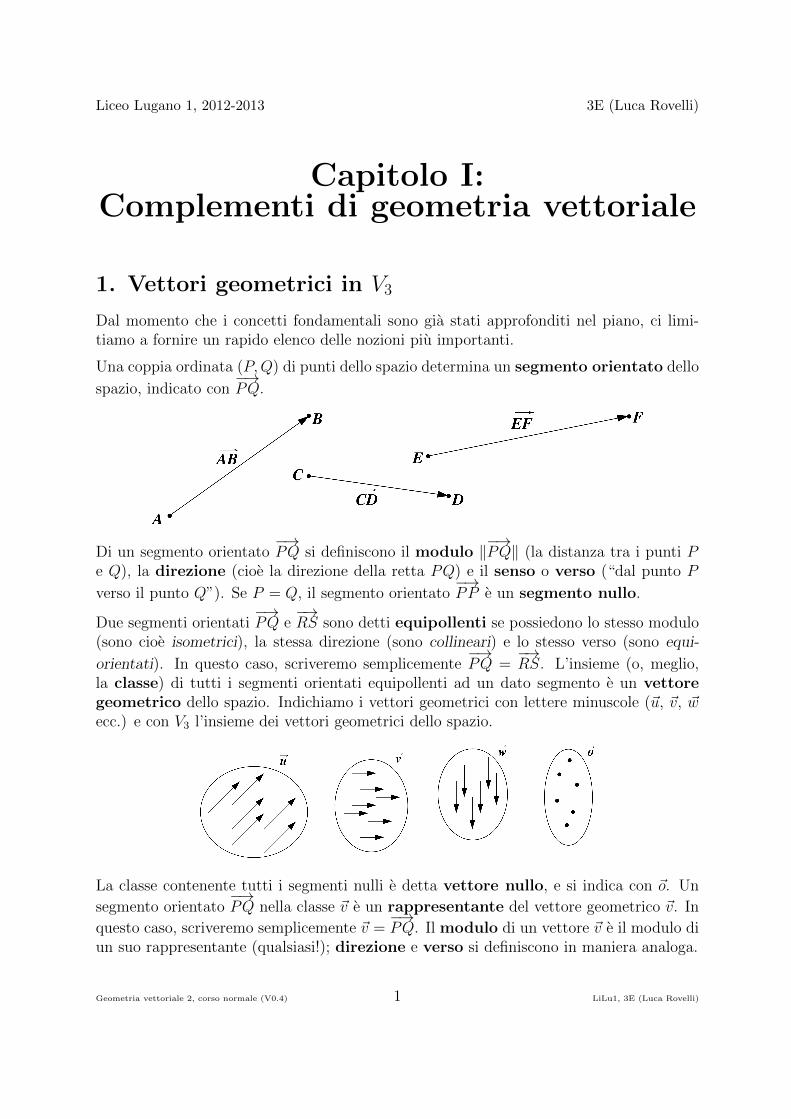
Una coppia ordinata (P,Q) di punti dello spazio determina un segmento orientato dello
spazio, indicato con−→PQ.
Di un segmento orientato−→PQ si definiscono il modulo ‖
−→PQ‖ (la distanza tra i punti P
e Q), la direzione (cioe la direzione della retta PQ) e il senso o verso (“dal punto P
verso il punto Q”). Se P = Q, il segmento orientato−→PP e un segmento nullo.
Due segmenti orientati−→PQ e
−→RS sono detti equipollenti se possiedono lo stesso modulo
(sono cioe isometrici), la stessa direzione (sono collineari) e lo stesso verso (sono equi-
orientati). In questo caso, scriveremo semplicemente−→PQ =
−→RS. L’insieme (o, meglio,
la classe) di tutti i segmenti orientati equipollenti ad un dato segmento e un vettoregeometrico dello spazio. Indichiamo i vettori geometrici con lettere minuscole (~u, ~v, ~wecc.) e con V3 l’insieme dei vettori geometrici dello spazio.
La classe contenente tutti i segmenti nulli e detta vettore nullo, e si indica con ~o. Un
segmento orientato−→PQ nella classe ~v e un rappresentante del vettore geometrico ~v. In
questo caso, scriveremo semplicemente ~v =−→PQ. Il modulo di un vettore ~v e il modulo di
un suo rappresentante (qualsiasi!); direzione e verso si definiscono in maniera analoga.
Geometria vettoriale 2, corso normale (V0.4) 1 LiLu1, 3E (Luca Rovelli)

L’ addizione vettoriale di due vettori ~u e ~v si definiscetramite la “regola della poligonale”: si scelgono innanzi-
tutto due rappresentanti−→AB = ~u e
−−→BC = ~v, e si
definisce ~u+ ~v =−→AC.
Per sommare piu vettori si procede in maniera analoga:
Se si ottiene una poligonale chiusa, allora la somma e il vettore nullo:
~a+~b+ ~c+ ~d+ ~e = ~o
L’addizione vettoriale possiede le seguenti proprieta algebriche:
(A1) E associativa: (~a+~b) + ~c = ~a+ (~b+ ~c) ∀~a,~b,~c ∈ V3
(A2) esiste l’elemento neutro, il vettore nullo ~o: ~a+ ~o = ~o+ ~a = ~a ∀~a ∈ V3;
(A3) esiste l’elemento simmetrico: ∀ ~a ∈ V3 ∃ (−~a) ∈ V3 con ~a+ (−~a) = (−~a) +~a = ~o
(se ~a =−→PQ, allora si sceglie (−~a) =
−→QP );
(A4) e commutativa: ~a+~b = ~b+ ~a ∀~a,~b ∈ V3
Dal punto di vista algebrico, l’addizione in V3 si comporta quindi come l’addizione in R:si dice che (V3, + ) ha la struttura di gruppo abeliano (o gruppo commutativo).
L’esistenza dell’elemento simmetrico permette di definire anche la sottrazione vettoria-le, tramite ~a−~b := ~a+ (−~b).
Geometria vettoriale 2, corso normale (V0.4) 2 LiLu1, 3E (Luca Rovelli)

La moltiplicazione λ ·~v (o semplicemente λ~v) di un vettore ~v con un numero reale λ ∈ R(o “moltiplicazione scalare”) si definisce come segue: λ · ~o = ~o , 0 · ~v = ~o
e per ~v 6= ~o, λ 6= 0 :
• (modulo) ‖λ~v‖ = |λ| · ‖~v‖;
• (direzione) λ~v ha la direzione di ~v;
• (verso)
{se λ > 0, λ~v ha il verso di ~v
se λ < 0, λ~v ha verso opposto a ~v
Proprieta algebriche:
(M1) 1 · ~v = ~v ∀~v ∈ V3;
(M2) (λµ) · ~v = λ · (µ~v) ∀λ, µ ∈ R, ∀~v ∈ V3;
(M3) (λ+ µ) · ~v = λ~v + µ~v ∀λ, µ ∈ R, ∀~v ∈ V3;
(M4) λ(~v + ~w) = λ~v + λ~w ∀λ ∈ R, ∀~v, ~w ∈ V3.Le proprieta (A1)-(A4) e (M1)-(M4) si riassumono dicendo che (V3, + , · ) e uno spaziovettoriale reale. Esse permettono in particolare di calcolare con i vettori senza doverricorrere all’interpretazione geometrica.
2. Dipendenza e indipendenza lineare
Siano ~v1, ~v2, . . . ~vn ∈ V3 e λ1, λ2, . . . λn ∈ R. Ricorda che il vettore
~v = λ1~v1 + λ2~v2 + . . .+ λn~vn
e una combinazione lineare dei vettori ~v1, ~v2, . . . ~vn.
Il seguente concetto e di importanza fondamentale nel campo della matematica noto comealgebra lineare:
Definizione 1 (Dipendenza lineare)I vettori ~v1, ~v2, . . . ~vn sono detti linearmente dipendenti se esistono λ1, λ2, . . . λn ∈R non tutti nulli tali che
λ1~v1 + λ2~v2 + . . .+ λn~vn = ~o ,
cioe se esiste una combinazione lineare nulla di ~v1, ~v2, . . . ~vn con coefficienti non tuttinulli.
Osservazione: supponendo ad esempio λ1 6= 0, possiamo “isolare” ~v1 e scrivere
~v1 =
(−λ2λ1
)· ~v2 +
(−λ3λ1
)· ~v3 + . . .+
(−λnλ1
)· ~vn .
Possiamo cioe scrivere ~v1 come combinazione lineare di ~v2, . . . , ~vn: n vettori ~v1, ~v2, . . . ~vnsono quindi linearmente dipendenti se e soltanto se (almeno) uno di essi e esprimibilecome combinazione lineare degli altri.
Geometria vettoriale 2, corso normale (V0.4) 3 LiLu1, 3E (Luca Rovelli)

Definizione 2 (Indipendenza lineare)I vettori ~v1, ~v2, . . . ~vn sono detti linearmente indipendenti se essi non sono linear-mente dipendenti, cioe se dall’affermazione
λ1~v1 + λ2~v2 + . . .+ λn~vn = ~o
segue λ1 = λ2 = . . . = λn = 0 (l’unico modo per scrivere il vettore nullo comecombinazione lineare e porre tutti i coefficienti uguali a zero).
Valgono le seguenti affermazioni:
(i) Se uno dei vettori ~v1, ~v2, . . . ~vn e nullo, allora ~v1, ~v2, . . . ~vn sono linearmente dipen-denti. Infatti, supponendo ad es. che valga ~v1 = ~o,
1 · ~v1 + 0 · ~v2 + . . .+ 0 · ~vn = ~o
e una combinazione lineare nulla a coefficienti non tutti nulli!
(ii) Due vettori non nulli sono linearmente dipendenti ⇐⇒ essi sono collineari, cioerappresentabili su una stessa retta. Infatti vale
~v2 = λ · ~v1 ⇐⇒ λ · ~v1 + (−1) · ~v2 = ~o .
(iii) Tre vettori non nulli sono linearmente dipendenti ⇐⇒ essi sono complanari, cioerappresentabili su uno stesso piano;
(iv) Tre o piu vettori di V2 oppure quattro o piu vettori di V3 sono sempre linearmentedipendenti.
Il Teorema seguente, di cui tralasciamo la dimostrazione, riveste un’importanza fonda-mentale nell’ambito dell’algebra lineare.
Teorema 1 (Scomposizione di un vettore)Sia {~v1, ~v2, . . . , ~vn} un sistema massimo di vettori linearmente indipendenti (cioe taleche l’aggiunta di un ulteriore vettore li rende dipendenti) di uno spazio vettorialeV . Allora ogni vettore ~v ∈ V e esprimibile in un unico modo come combinazionelineare
~v = λ1~v1 + λ2~v2 + . . .+ λn~vn con λ1, λ2, . . . , λn ∈ R.
Nel caso particolare V = V3 segue immediatamente il
Corollario 2 (Scomposizione di un vettore in V3)
Siano ~a, ~b e ~c tre vettori non complanari di V3. Allora ogni vettore ~v ∈ V3 eesprimibile in un unico modo come combinazione lineare
~v = λ~a+ µ~b+ ν~c con λ, µ, ν ∈ R.
Geometria vettoriale 2, corso normale (V0.4) 4 LiLu1, 3E (Luca Rovelli)

Illustrazione: si tratta di un analogo tridimensionale della regola del parallelogrammo;basta notare che ogni vettore ~v si lascia rappresentare come diagonale di un parallelepipedodi spigoli collineari ad ~a, ~b e ~c :
λ~a~a
µ~b
~b
ν~c
~c
~v = λ~a+ µ~b+ ν~c
Definizione 3 (Base)Un sistema massimo {~v1, ~v2, . . . , ~vn} di vettori linearmente indipendenti di uno spaziovettoriale V costituisce una base di V .
Osservazioni:
(i) Ogni elemento di uno spazio vettoriale V e quindi esprimibile in modo univococome combinazione lineare degli elementi di una sua base, che rappresenta quindi unsistema minimo di generatori (cioe tale che la rimozione di un vettore non permettepiu di generare l’intero spazio V ).
(ii) Una base di V2 e costituita da una coppia {~a,~b} di vettori non collineari, e una base
di V3 e costituita da una terna {~a,~b,~c} di vettori non complanari.
(iii) In algebra lineare, la dimensione dim(V ) di uno spazio vettoriale e pari al numerodi elementi di una sua base. Vale quindi
dim(V2) = 2 e dim(V3) = 3 .
Tale definizione1 rende rigoroso il concetto intuitivo di dimensione come “numerodi gradi di liberta”.
1per la quale, a dire il vero, occorrerebbe mostrare che ogni base ha lo stesso numero di elementi
Geometria vettoriale 2, corso normale (V0.4) 5 LiLu1, 3E (Luca Rovelli)
3. Vettori aritmetici dello spazio
Definizione 4 (Base ortonormata)
Una base {~i,~j,~k} di V3 e detta base ortonormata orientata positivamente sevale quanto segue:
(i) ‖~i‖ = ‖~j‖ = ‖~k‖ = 1;
(ii) ~i ⊥ ~j, ~i ⊥ ~k, ~j ⊥ ~k;
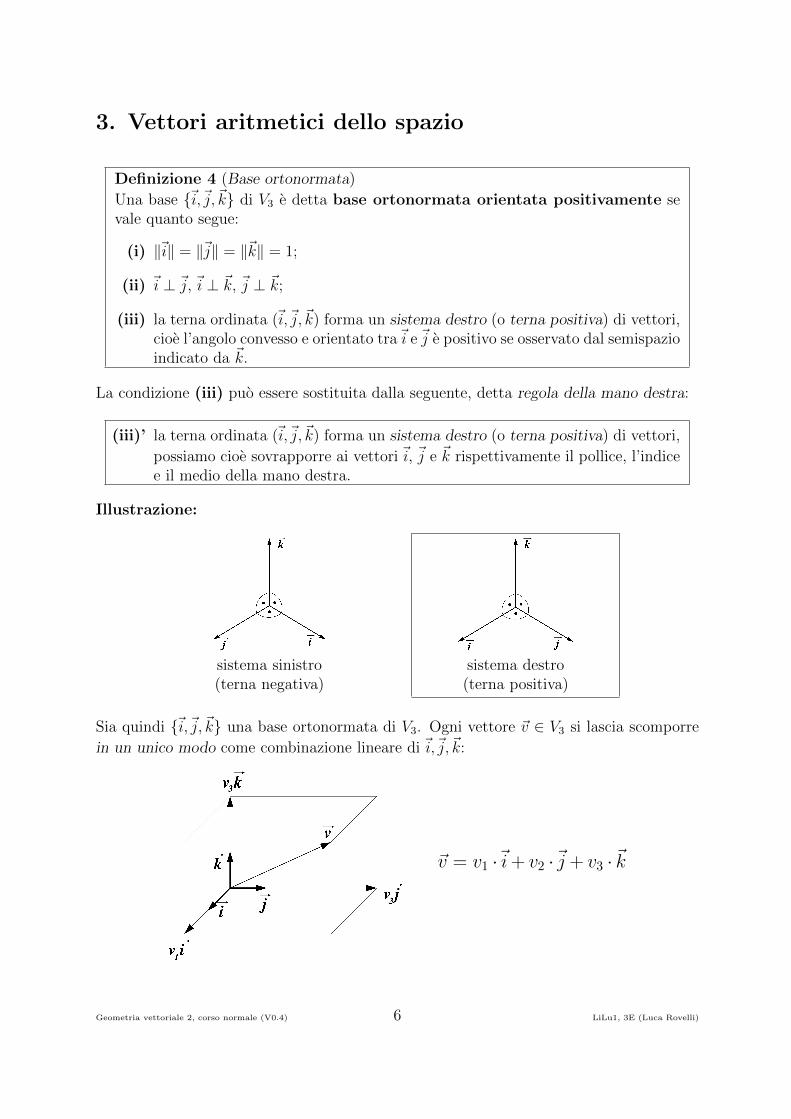
(iii) la terna ordinata (~i,~j,~k) forma un sistema destro (o terna positiva) di vettori,cioe l’angolo convesso e orientato tra~i e ~j e positivo se osservato dal semispazioindicato da ~k.
La condizione (iii) puo essere sostituita dalla seguente, detta regola della mano destra:
(iii)’ la terna ordinata (~i,~j,~k) forma un sistema destro (o terna positiva) di vettori,
possiamo cioe sovrapporre ai vettori ~i, ~j e ~k rispettivamente il pollice, l’indicee il medio della mano destra.
Illustrazione:
sistema sinistro(terna negativa)
sistema destro(terna positiva)
Sia quindi {~i,~j,~k} una base ortonormata di V3. Ogni vettore ~v ∈ V3 si lascia scomporre
in un unico modo come combinazione lineare di ~i,~j,~k:
~v = v1 ·~i+ v2 ·~j + v3 ·~k
Geometria vettoriale 2, corso normale (V0.4) 6 LiLu1, 3E (Luca Rovelli)

Il vettore ~v e determinato in maniera univoca dai numeri reali v1, v2, v3. In particolare,la“legge”
~v = v1 ·~i+ v2 ·~j + v3 · ~k 7−→ ~v =
v1v2v3
permette di identificare l’insieme V3 dei vettori geometrici con l’insieme dei vettori arit-metici dello spazio (che indichiamo con lo stesso simbolo V3):
V3 =
xyz
∣∣∣∣∣∣ x, y, z ∈ R
.
E facile mostrare che l’insieme dei vettori aritmetici munito dell’addizione vettorialev1v2v3
+
w1
w2
w3
:=
v1 + w1
v2 + w2
v3 + w3
e della moltiplicazione con un numero reale
λ ·
v1v2v3
:=
λv1λv2λv3
possiede una struttura di spazio vettoriale, compatibile con le corrispondenti operazionitra i vettori geometrici.
Applicazioni:
a) Condizione di collinearita tra 2 vettori ~v =
v1v2v3
e ~w =
w1
w2
w3
:
~v ‖ ~w ⇐⇒
∃ λ ∈ R conw1
w2
w3
= λ ·
v1v2v3
⇐⇒
∃ λ ∈ R conw1 = λv1
w2 = λv2
w3 = λv3
Esempio: i vettori
~v =
−√203
e ~w =
20
−3√
2
sono collineari, dal momento che vale ~w = −
√2 · ~v.
Geometria vettoriale 2, corso normale (V0.4) 7 LiLu1, 3E (Luca Rovelli)

b) Condizione di complanarita tra 3 vettori ~u =
u1u2u3
, ~v =
v1v2v3
e ~w =
w1
w2
w3
:
~u,~v, ~wsono
complanari
}⇐⇒
∃ λ, µ ∈ R con
λ
u1u2u3
+µ
v1v2v3
=
w1
w2
w3
⇐⇒
∃ λ, µ ∈ R conλu1 + µv1 = w1
λu2 + µv2 = w2
λu3 + µv3 = w3
I tre vettori sono quindi complanari (cioe linearmente dipendenti) se e soltanto se ilsistema di 3 equazioni
λu1 + µv1 = w1
λu2 + µv2 = w2
λu3 + µv3 = w3
nelle 2 incognite λ, µ possiede (almeno) una soluzione2.
Esempio: i vettori ~u =
332
, ~v =
−121
e ~w =
−2−34
sono complanari?
Occorre stabilire se il sistema
λ
332
+ µ
−121
=
−2−34
⇐⇒
3λ− µ = −2
3λ+ 2µ = −3
2λ+ µ = 4
possiede o meno soluzioni; un modo conveniente di procedere e la risoluzione delsistema “parziale” formato da due delle equazioni e la successiva verifica nella terza.
In questo caso, sottraendo la prima equazione dalla seconda otteniamo
3µ = −1 quindi µ = −1
3e λ =
1
3(µ− 2) = −7
9;
sostituendo λ = −79
e µ = −13
nella terza equazione abbiamo
2λ+ µ = −14
9− 1
3= −17
96= 4 .
Di conseguenza, il sistema non possiede soluzioni e i vettori ~u, ~v e ~w non sonocomplanari. Essi formano quindi una base di V3.
2piu tardi impareremo a studiare la dipendenza lineare di tre vettori in modo piu efficiente grazie aldeterminante
Geometria vettoriale 2, corso normale (V0.4) 8 LiLu1, 3E (Luca Rovelli)

c) Scomposizione di un vettore ~a =
a1a2a3
come combinazione lineare di tre vettori
(non complanari) ~u =
u1u2u3
, ~v =
v1v2v3
e ~w =
w1
w2
w3
: dobbiamo ricavare tre
numeri reali λ, µ, ν tali che
~a = λ~u+ µ~v + ν ~w ,
ovveroa1a2a3
= λ
u1u2u3
+ µ
v1v2v3
+ ν
w1
w2
w3
⇐⇒
λu1 + µv1 + νw1 = a1
λu2 + µv2 + νw2 = a2
λu3 + µv3 + νw3 = a3
Si tratta di un sistema di 3 equazioni nelle 3 incognite λ, µ, ν; se i vettori ~u,~v e ~wformano una base di V3 esiste sempre una e una sola soluzione.
Esempio: scrivi il vettore ~a =
4−919
come combinazione lineare dei vettori ~u, ~v e
~w dell’esempio in b).
Dal momento che {~u, ~w, ~w} e una base di V3 (v. sopra) l’esercizio possiede certa-mente un’unica soluzione. Risolviamo quindi il sistema 4
−919
= λ
332
+ µ
−121
+ ν
−2−34
⇐⇒
3λ− µ− 2ν = 4
3λ+ 2µ− 3ν = −9
2λ+ µ+ 4ν = 19
Dalla prima equazione ricaviamo µ = 3λ− 2ν − 4; sostituendo nella seconda e nellaterza {
3λ+ 2(3λ− 2ν − 4)− 3ν = −9
2λ+ 3λ− 2ν − 4 + 4ν = 19⇐⇒
{9λ− 7ν = −1
5λ+ 2ν = 23
Dalla seconda equazione ricaviamo ν = −52λ+ 23
2, e sostituendo nella prima
9λ+35
2λ− 161
2= −1 ⇐⇒ 53λ− 161 = −2 ⇐⇒ 53λ = 159 ⇐⇒ λ = 3
e quindi, sostituendo a ritroso,
ν = −5
2· 3 +
23
2= 4 e µ = 3 · 3− 2 · 4− 4 = −3 .
Vale quindi, com’e facile verificare,
~a = 3~u− 3~v + 4~w .
Geometria vettoriale 2, corso normale (V0.4) 9 LiLu1, 3E (Luca Rovelli)

4. Il prodotto scalare nello spazio
Definizione 5 (Prodotto scalare)Siano ~v, ~w due vettori geometrici di V3; il loro prodotto scalare ~v · ~w e il numeroreale definito come segue:
• se ~v = ~o oppure ~w = ~o, allora ~v · ~w = 0 ;
• se ~v 6= ~o e ~w 6= ~o, allora si definisce
~v · ~w = ‖~v‖ · ‖~w‖ · cosα ,
dove α e l’angolo (solitamente positivo e convesso) tra due rappresentanti di~v e ~w uscenti da uno stesso punto.
Osservazione: dal momento che vale cos(α) = cos(−α) = cos(2π − α), la condizione “αpositivo e convesso” puo anche essere tralasciata.
Illustrazione: sia ~w‖ la proiezione ortogonale di ~w su ~v; allora
‖~w‖ · cosα = ±‖~w‖‖ ;
~v~v
~w~w
αα
~w‖~w‖
in particolare, vale ~v · ~w = ‖~v‖ · ‖~w‖‖ se α e acuto e ~v · ~w = −‖~v‖ · ‖~w‖‖ se α e ottuso.
Analogamente a quanto visto in V2, il prodotto scalare di due vettori aritmetici possiedeuna semplice espressione:
Teorema 3 (Prodotto scalare di 2 vettori aritmetici)v1v2v3
·w1
w2
w3
= v1w1 + v2w2 + v3w3 .
Applicazioni:
a) Modulo di un vettore aritmetico: dal momento che ~v ·~v = ‖~v‖ · ‖~v‖ · cos 0◦︸ ︷︷ ︸1
= ‖~v‖2,
‖~v‖ =
∥∥∥∥∥∥v1v2v3
∥∥∥∥∥∥ =√~v · ~v =
√v21 + v22 + v23 .
Geometria vettoriale 2, corso normale (V0.4) 10 LiLu1, 3E (Luca Rovelli)

Ad esempio, per il vettore ~v =
148
vale ‖~v‖ =√
12 + 42 + 82 =√
81 = 9 .
b) Angolo tra 2 vettori aritmetici: dalla definizione ricaviamo immediatamente
cosα =~v · ~w‖~v‖ · ‖~w‖
=v1w1 + v2w2 + v3w3√
v21 + v22 + v23 ·√w2
1 + w22 + w2
3
.
Ad esempio, per i vettori ~v =
148
e ~w =
236
vale
α = arccos1 · 2 + 4 · 3 + 8 · 6√
12 + 42 + 82 ·√
22 + 32 + 62= arccos
62
9 · 7∼= 10◦13′20′′ .
c) Condizione di ortogonalita: se due vettori ~v e ~w sono ortogonali, allora vale~v · ~w = ‖~v‖ · ‖~w‖ · cos 90◦︸ ︷︷ ︸
0
, cioe
~v ⊥ ~w ⇐⇒ ~v · ~w = 0 ⇐⇒ v1w1 + v2w2 + v3w3 = 0 .
Ad esempio, e facile mostrare che
123
⊥ 7−2−1
.
5. Il prodotto vettoriale
Introduciamo una nuova operazione tra vettori di V3, fondamentale per le applicazionigeometriche.
Definizione 6 (Prodotto vettoriale)Siano ~v e ~w due vettori in V3. Il loro prodotto vettoriale ~v × ~w (leggi “~v cross~w”) e il vettore in V3 che soddisfa le seguenti condizioni:
• se ~v = ~o oppure ~w = ~o, allora ~v × ~w = ~o ;
• siano ~v 6= ~o e ~w 6= ~o; allora
1) (modulo) ‖~v × ~w‖ = ‖~v‖ · ‖~w‖ · | sinα| ove α e l’angolo tra ~v e ~w;
2) (direzione) ~v × ~w ⊥ ~v e ~v × ~w ⊥ ~w ;
3) (verso) la terna ordinata (~v, ~w,~v × ~w) e una terna positiva .
Geometria vettoriale 2, corso normale (V0.4) 11 LiLu1, 3E (Luca Rovelli)

In altre parole:
1) il modulo di ~v × ~w e uguale all’area di un parallelogrammo avente lati equipollentia ~v e ~w ;
2) ~v × ~w e perpendicolare a un piano parallelo a due rappresentanti di ~v e ~w ;
3) i vettori ~v, ~w,~v × ~w (considerati in questo ordine) soddisfano la “regola della manodestra”: ~v ↔ pollice, ~w ↔ indice, ~v × ~w ↔ medio (della mano destra!).
Illustrazione:
~v~w
~v × ~w
α A
1) ‖~v× ~w‖ = ‖~v‖ · ‖~w‖ · | sinα| = A
2) ~v × ~w ⊥ ~v , ~v × ~w ⊥ ~w
3) (~v, ~w,~v× ~w) e una terna positiva.
Proprieta del prodotto vettoriale:
(i) ~v × ~w = −~w × ~v ∀ ~v, ~w ∈ V3 (il prodotto vettoriale e cioe anticommutativo).
~v ~w
~v × ~w
~w × ~v
Dimostrazione: i vettori ~v× ~w e ~w×~v hanno la stessadirezione e lo stesso modulo, ma versi opposti: dal mo-mento che le terne (~v, ~w,~v × ~w) e (~w,~v, ~w × ~v) sonoentrambe positive, deve valere ~w × ~v = −~v × ~w �
(ii) Due vettori ~v e ~w sono collineari ⇐⇒ ~v × ~w = ~o.
Dimostrazione: Sia α = ∠(~v, ~w); allora vale
~v ‖ ~w ⇐⇒ α = 0 oppure α = π ⇐⇒ ‖~v × ~w‖ =
{‖~v‖ · ‖~w‖ · sin 0
‖~v‖ · ‖~w‖ · sin π
⇐⇒ ‖~v × ~w‖ = 0 ⇐⇒ ~v × ~w = ~o �
(iii) Per due vettori non nulli e ortogonali ~v e ~w, vale
‖~v × ~w‖ = ‖~v‖ · ‖~w‖ · sin(±π
2
)= ±‖~v‖ · ‖~w‖ .
Per il calcolo del prodotto vettoriale di due vettori aritmetici vale il
Teorema 4 (Prodotto vettoriale di 2 vettori aritmetici)Siano ~v, ~w ∈ V3; allora
~v × ~w =
v1v2v3
×w1
w2
w3
=
v2w3 − v3w2
−v1w3 + v3w1
v1w2 − v2w1
.
Geometria vettoriale 2, corso normale (V0.4) 12 LiLu1, 3E (Luca Rovelli)

Dimostrazione (parziale): sia ~z =
v2w3 − v3w2
−v1w3 + v3w1
v1w2 − v2w1
; verifichiamo 1) e 2).
1) Occorre verificare che ~v · ~z = ~w · ~z = 0:
• ~v · ~z =
v1v2v3
· v2w3 − v3w2
−v1w3 + v3w1
v1w2 − v2w1
= v1v2w3 − v1v3w2 − v1v2w3 + v2v3w1 + v1v3w2 − v2v3w1 = 0 ;
• ~w · ~z = 0 si dimostra analogamente.
2) Dal momento che vale ‖~v‖ ≥ 0, ‖~w‖ ≥ 0 e ‖~z‖ ≥ 0,
‖~z‖ = ‖~v‖ · ‖~w‖ · | sin α| ⇐⇒ ‖~z‖2 = ‖~v‖2 · ‖~w‖2 · sin2 α︸ ︷︷ ︸1−cos2 α
.
Dobbiamo verificare quest’ultima uguaglianza: in componenti, il termine a sinistradiventa
‖~z‖2 = (v2w3 − v3w2)2 + (−v1w3 + v3w1)
2 + (v1w2 − v2w1)2
mentre il termine a destra diventa
‖~v‖2 · ‖~w‖2 · (1− cos2 α) = ‖~v‖2 · ‖~w‖2 − ‖~v‖2 · ‖~w‖2 · cos2 α = ‖~v‖2 · ‖~w‖2 − (~v · ~w)2
= (v21 + v22 + v23)(w21 + w2
2 + w23)− (v1w1 + v2w2 + v3w3)
2 .
Ora non resta che confrontare le due espressioni ottenute (si tratta di un semplice,ma tedioso, esercizio di calcolo letterale) �
Utilizzando l’abbreviazione
∣∣∣∣ a bc d
∣∣∣∣ = ad − bc (determinante di ordine 2), la formula
diventa
~v × ~w =
v1v2v3
×w1
w2
w3
=
+
∣∣∣∣ v2 w2
v3 w3
∣∣∣∣−∣∣∣∣ v1 w1
v3 w3
∣∣∣∣+
∣∣∣∣ v1 w1
v2 w2
∣∣∣∣
.
Esempi: siano ~u =
123
, ~v =
1−12
, ~w =
−213
. Calcola
~u× ~v , ~v × ~w , ~u× (~v × ~w) , (~u× ~v)× ~w .
Geometria vettoriale 2, corso normale (V0.4) 13 LiLu1, 3E (Luca Rovelli)

Per il primo prodotto vale
~u× ~v =
123
× 1−12
=
+
∣∣∣∣ 2 −13 2
∣∣∣∣−∣∣∣∣ 1 1
3 2
∣∣∣∣+
∣∣∣∣ 1 12 −1
∣∣∣∣
=
2 · 2− 3 · (−1)−1 · 2 + 3 · 1
1 · (−1)− 2 · 1
=
71−3
.
Analogamente:
~v × ~w =
−5−7−1
, ~u× (~v × ~w) =
19−14
3
, (~u× ~v)× ~w =
6−15
9
.
Osservazione: come mostra l’esempio, in generale vale ~u × (~v × ~w) 6= (~u × ~v) × ~w. Ilprodotto vettoriale non soddisfa la proprieta associativa; non ha quindi senso scriveresemplicemente ~u× ~v × ~w.
Applicazioni:
a) Direzione ortogonale a due vettori ~v =
v1v2v3
e ~w =
w1
w2
w3
.
Risulta immediatamente chiaro che qualsiasi vettore collineare a ~v × ~w soddisfaquesta condizione.
Esempio: se ~v =
123
e ~w =
1−12
, possiamo utilizzare ~v × ~w =
71−3
.
b) Area A(~v, ~w) del parallelogrammo definito da ~v e ~w.
E chiaro che vale, per definizione, A(~v, ~w) = ‖~v × ~w‖.Esempio: siano ~v e ~w come sopra; allora vale
A(~v, ~w) = ‖~v × ~w‖ =
∥∥∥∥∥∥ 7
1−3
∥∥∥∥∥∥ =√
49 + 1 + 9 =√
59 .
c) Siano ora ~a =
(a1a2
)e ~b =
(b1b2
)due vettori in V2. Per ricavare l’area A(~a,~b)
possiamo procedere come segue: innanzitutto “immergiamo” V2 in V3 identificando
V2 con l’insieme (il sottospazio) dei vettori della forma
xy0
; identifichiamo quindi
Geometria vettoriale 2, corso normale (V0.4) 14 LiLu1, 3E (Luca Rovelli)

~a e ~b rispettivamente con ~a′ =
a1a20
e ~b′ =
b1b20
e calcoliamo
A(~a,~b) = A(~a′,~b′) =
∥∥∥∥∥∥a1a2
0
×b1b2
0
∥∥∥∥∥∥ =
∥∥∥∥∥∥∥∥
00∣∣∣∣ a1 b1
a2 b2
∣∣∣∣∥∥∥∥∥∥∥∥ =
∣∣∣∣∣∣∣∣∣ a1 b1a2 b2
∣∣∣∣∣∣∣∣∣ = |a1b2 − a2b1|
(cfr. con il programma di II Liceo).
6. Il prodotto misto
Definizione 7 (Prodotto misto)Siano ~u,~v, ~w tre vettori di V3. Il loro prodotto misto [~u,~v, ~w] e il numero reale
[~u,~v, ~w] := (~u× ~v) · ~w .
Interpretazione geometrica: innanzitutto notiamo che
[~u,~v, ~w] = (~u× ~v) · ~w = ‖~u× ~v‖ · ‖~w‖ · cosα
ove α e l’angolo convesso e positivo tra ~u× ~v e ~w.
~u
~v
~whh
~u× ~v
α
A
Nota che ‖~w‖ · cosα = ±h, dove h e l’altezzadel parallelepipedo avente ~u, ~v e ~w comespigoli, e ‖~u × ~v‖ = A(~u, ~w) e l’area del pa-rallelogrammo avente per lati ~u e ~v. Notainoltre che vale cosα > 0 se e soltanto se αe acuto, cioe se (~u,~v, ~w) e una terna positiva(soddisfa cioe la “regola della mano destra”).
Sia V(~u,~v, ~w) il volume del parallelepipedo avente ~u, ~v e ~w come spigoli; otteniamo
‖~u× ~v‖ · ‖~w‖ · cosα = ±A · h .
Quindi
•∣∣ [~u,~v, ~w]
∣∣ = V(~u,~v, ~w) e il volume del parallelepipedo;
• [~u,~v, ~w] > 0 ⇐⇒ (~u,~v, ~w) e una terna positiva.
In altre parole: [~u,~v, ~w] = ±V(~u,~v, ~w) e il volume orientato di un parallelepipedo deter-minato da ~u, ~v e ~w.
Geometria vettoriale 2, corso normale (V0.4) 15 LiLu1, 3E (Luca Rovelli)

Proprieta del prodotto misto:
(i) Scambiando due vettori di una terna, il suo segno si inverte ma il volume non cambia;vale quindi
[~u,~v, ~w] = − [~v, ~u, ~w] = − [~u, ~w,~v] = − [~w,~v, ~u] .
Permutando ciclicamente i vettori di una terna, non cambiano ne il volume, nel’orientamento:
[~u,~v, ~w] = [~v, ~w, ~u] = [~w, ~u,~v] .
(ii) Vale anche [~u,~v, ~w] = ~u · (~v × ~w).
Dimostrazione:
[~u,~v, ~w] = [~v, ~w, ~u] = (~v × ~w) · ~u = ~u · (~v × ~w) �
(iii) Tre vettori ~u,~v, ~w sono linearmente dipendenti ⇐⇒ [~u,~v, ~w] = 0.
Dimostrazione:
~u,~v, ~w sono lin. dip. ⇐⇒ ~u,~v, ~w sono complanari ⇐⇒ V(~u,~v, ~w) = 0
⇐⇒ [~u,~v, ~w] = 0 �
In particolare, se (almeno) due dei vettori ~u,~v, ~w coincidono, il loro prodotto vetto-riale e nullo.
Per il prodotto misto di tre vettori aritmetici ~u =
u1u2u3
, ~v =
v1v2v3
e ~w =
w1
w2
w3
si utilizza la notazione
[~u,~v, ~w] =
∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ .
Tale numero e anche detto determinante dei vettori ~u,~v, ~w (si parla di determinante diordine 3). Invece di [~u,~v, ~w] si scrive anche det(~u,~v, ~w).
Per il calcolo del determinante, sfruttiamo ad es. l’osservazione (ii):
[~u,~v, ~w] = ~u·(~v×~w) =
u1u2u3
·
+
∣∣∣∣ v2 w2
v3 w3
∣∣∣∣−∣∣∣∣ v1 w1
v3 w3
∣∣∣∣+
∣∣∣∣ v1 w1
v2 w2
∣∣∣∣
= u1·
∣∣∣∣ v2 w2
v3 w3
∣∣∣∣−u2·∣∣∣∣ v1 w1
v3 w3
∣∣∣∣+u3·∣∣∣∣ v1 w1
v2 w2
∣∣∣∣
(si tratta dello “sviluppo di Laplace del determinante rispetto alla prima colonna”).
Geometria vettoriale 2, corso normale (V0.4) 16 LiLu1, 3E (Luca Rovelli)

Esempio: calcola [~u,~v, ~w] con ~u =
−125
, ~v =
31−2
, ~w =
158
.
Soluzione:
[~u,~v, ~w] =
∣∣∣∣∣∣−1 3 12 1 55 −2 8
∣∣∣∣∣∣ = (−1) ·∣∣∣∣ 1 5−2 8
∣∣∣∣− 2 ·∣∣∣∣ 3 1−2 8
∣∣∣∣+ 5 ·∣∣∣∣ 3 1
1 5
∣∣∣∣= (−1) · 18− 2 · 26 + 5 · 14
= −18− 52 + 70 = 0 .
Un’altra formula utile per il calcolo di un determinante di ordine 3 e la seguente:
Teorema 5 (Regola di Sarrus)∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ = u1v2w3 + v1w2u3 + w1u2v3 − u3v2w1 − v3w2u1 − w3u2v1 .
Dimostrazione: semplice verifica.Schema mnemonico:
u1 v1 w1
u2 v2 w2
u3 v3 w3
u1 v1
u2 v2
u3 v3
−u3v 2w 1
−v3w 2u 1
−w3u 2v 1
+u1 v2w
3
+v1w
2 u3
+w1 u2 v3
Esempio: calcoliamo di nuovo il determinante dell’es. precedente.∣∣∣∣∣∣−1 3 12 1 55 −2 8
∣∣∣∣∣∣ = (−1) · 1 · 8 + 3 · 5 · 5 + 1 · 2 · (−2)− 5 · 1 · 1− (−2) · 5 · (−1)− 8 · 2 · 3
= −8 + 75− 4− 5− 10− 48 = 0 .
Applicazioni del prodotto misto:
a) Volume V(~u,~v, ~w) del parallelepipedo avente ~u, ~v, ~w quali spigoli: come abbiamogia notato,
V(~u,~v, ~w) =∣∣ [~u,~v, ~w]
∣∣Geometria vettoriale 2, corso normale (V0.4) 17 LiLu1, 3E (Luca Rovelli)

b) Altezza h del parallelepipedo avente ~u, ~v, ~w quali spigoli (relativa alla faccia ~u, ~v):
Dal momento che vale∣∣ [~u,~v, ~w]∣∣ = ‖~u× ~v‖ · ‖~w‖ · | cosα|︸ ︷︷ ︸
h
,
otteniamo
h =
∣∣ [~u,~v, ~w]∣∣
‖~u× ~v‖
c) dall’osservazione (iii) a pagina 16 segue che il determinante permette una verificaimmediata della dipendenza (o dell’indipendenza) lineare:
Teorema 6 (Criterio per la dipendenza lineare)u1u2u3
,
v1v2v3
,
w1
w2
w3
sono linearmente dipendenti ⇐⇒
∣∣∣∣∣∣u1 v1 w1
u2 v2 w2
u3 v3 w3
∣∣∣∣∣∣ = 0 .
7. La regola di Cramer
Consideriamo un sistema di equazionia1x+ b1y + c1z = d1
a2x+ b2y + c2z = d2
a3x+ b3y + c3z = d3
.
e riscriviamolo nella forma vettoriale x · ~a+ y ·~b+ z · ~c = ~d , con
~a =
a1a2a3
, ~b =
b1b2b3
, ~c =
c1c2c3
, ~d =
d1d2d3
.
Sia
D = [~a,~b,~c] =
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ 6= 0 .
Per quanto visto nei paragrafi precedenti, sappiamo gia che il sistema possiede un’unicasoluzione per ogni scelta di ~d se e soltanto se {~a,~b,~c} e una base di V3, e che cio eequivalente a D 6= 0. In questo caso, grazie al determinante e possibile esprimere x, y ez per mezzo di formule nei coefficienti del sistema.
Geometria vettoriale 2, corso normale (V0.4) 18 LiLu1, 3E (Luca Rovelli)

Teorema 7 (La regola di Cramer)Se vale
D = [~a,~b,~c] =
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ 6= 0 ,
il sistema possiede l’unica soluzione (x, y, z), con
x =D1
D, y =
D2
D, z =
D3
D,
dove
D1 = [~d,~b,~c] =
∣∣∣∣∣∣d1 b1 c1d2 b2 c2d3 b3 c3
∣∣∣∣∣∣ , D2 = [~a, ~d,~c] =
∣∣∣∣∣∣a1 d1 c1a2 d2 c2a3 d3 c3
∣∣∣∣∣∣ , D3 = [~a,~b, ~d] =
∣∣∣∣∣∣∣a1 b1 d1a2 b2 d2a3 b3 d3
∣∣∣∣∣∣∣ .Dimostrazione: tralasciata.
Osservazione: se d1 = d2 = d3 = 0 (cioe se il sistema e omogeneo) e D 6= 0, valeD1 = D2 = D3 = 0 e l’unica soluzione del sistema e (x, y, z) = (0, 0, 0), in accordo conla definizione di indipendenza lineare (“l’unico modo di esprimere ~o come combinazione
lineare di ~a, ~b e ~c e per mezzo di coefficienti nulli”).
Esempio: risolviamo il sistema di equazioni3x− y − 2z = −14
3x+ 2y − 3z = −9
2x− y + 4z = 11
Calcoliamo dapprima
D =
∣∣∣∣∣∣3 −1 −23 2 −32 −1 4
∣∣∣∣∣∣ = 47 ;
dal momento che D 6= 0, il sistema ha certamente una soluzione. Con
D1 =
∣∣∣∣∣∣−14 −1 −2−9 2 −311 −1 4
∣∣∣∣∣∣ = −47 , D2 =
∣∣∣∣∣∣3 −14 −23 −9 −32 11 4
∣∣∣∣∣∣ = 141 , D3 =
∣∣∣∣∣∣3 −1 −143 2 −92 −1 11
∣∣∣∣∣∣ = 188
otteniamo x =−47
47= −1, y =
141
47= 3, z =
188
47= 4 , S = {(−1, 3, 4)}.
Geometria vettoriale 2, corso normale (V0.4) 19 LiLu1, 3E (Luca Rovelli)


















