13-circuiti-dinamici
30
Circuiti dinamici www.die.ing.unibo.it/pers/mastri/didattica.htm (versione del 7-3-2008) 2 Equazioni di un circuito dinamico lineare ● Ipotesi: Circuito lineare Numero di lati: l Numero di lati corrispondenti a componenti dinamici: l d ¨ Equazioni: LKV, LKI ¨ l equazioni lineari algebriche omogenee Componenti resistivi ¨ l − l d equazioni lineari algebriche Componenti dinamici ¨ l d equazioni differenziali lineari dt d L t k k k i ) ( v = dt d C t k k k v ) ( i = Induttori Condensatori
description
dispensa elettrotecnica
Transcript of 13-circuiti-dinamici

Circuiti dinamici
www.die.ing.unibo.it/pers/mastri/didattica.htm
(versione del 7-3-2008)
2
Equazioni di un circuito dinamico lineare
● Ipotesi:
Circuito lineare
Numero di lati: l
Numero di lati corrispondenti a componenti dinamici: ld
Equazioni:
LKV, LKI l equazioni lineari algebriche omogenee
Componenti resistivi l − ld equazioni lineari algebriche
Componenti dinamici ld equazioni differenziali lineari
dt
dLt k
kk
i)(v =
dt
dCt k
kk
v)(i =
InduttoriCondensatori

3
Stato di un circuito dinamico
● La determinazione dell’andamento della risposta di un circuito dinamico a partire da un istante iniziale t0 richiede la conoscenza
dell’andamento per t ≥ t0 delle grandezze impresse dei generatori indipendenti (ingressi)
di ld condizioni iniziali corrispondenti ai valori all’istante t0 delle grandezze che compaiono sotto il segno di derivata nelle equazioni del circuito
● Stato del circuito all’istante t = t0: insieme di informazioni che assieme all’andamento degli ingressi per t ≥ t0 consentono di determinare la risposta del circuito per t ≥ t0
● Variabili di stato: insieme di variabili mediante le quali può essere rappresentato lo stato del circuito
Esempi:tensioni dei condensatori e correnti degli induttori cariche dei condensatori e flussi degli induttori
4
Ordine di un circuito
● Ordine di un circuito: N = numero di variabili indipendenti necessarie per descrivere lo stato del circuito
corrisponde all’ordine del sistema di equazioni differenziali, cioè alla somma dei massimi ordini di derivazione delle funzioni incognite
normalmente coincide con il numero di componenti dinamici contenuti nel circuito N = ld
● In alcuni casi particolari è possibile che, a causa della struttura del circuito, le variabili di stato non siano indipendenti tra loro
in questo caso risulta N < ld
i circuiti in cui si verifica questa condizione sono dettidegeneri

5
Circuiti degeneri
● Un circuito formato da elementi R L C e generatori indipendenti èdegenere se e solo se contiene
almeno una maglia formata da generatori di tensione e condensatori (maglia di condensatori)almeno un taglio formato da generatori di corrente e induttori(taglio di induttori)
● Per i circuiti che contengono componenti multipolari, e in particolare generatori dipendenti, non si può formulare un criterio generale(occorre verificare caso per caso)
● I circuiti degeneri corrispondono a situazioni idealizzate, fisicamente non realizzabili
● L’analisi dei circuiti degeneri è più complessa dell’analisi dei circuiti non degeneri
In seguito, salvo indicazione esplicita, si farà riferimento ai soli circuiti non degeneri
6
Equazione risolvente
● Risolvendo le equazioni di un circuito dinamico lineare rispetto alla tensione o alla corrente di un lato, y(t), si ottiene un’equazione del tipo
Il secondo membro è una combinazione lineare delle tensioni e correnti impresse dai generatori indipendenti e di loro derivaterispetto al tempoI coefficienti ak dipendono dai parametri degli altri componentiL’ordine dell’equazione differenziale generalmente coincide con l’ordine del circuito (ma in casi particolari può essere inferiore)
EsempioIn questo caso l’analisi del cir-cuito richiede la risoluzione didue equazioni del primo ordinedisaccoppiate tra loro
)f()y()y()y()y(
011
1
1 ttadt
tda
dt
tda
dt
tda
N
N
NN
N
N =++++ −
−
− L

7
Risoluzione dell’equazione differenziale
● L’integrale generale dell’equazione differenziale può essere espresso nella forma: yG(t) = yH(t) + yP(t)
yH(t) = integrale generale dell’equazione omogenea associata(soluzione omogenea)
yP(t) = integrale particolare dell’equazione differenziale(soluzione particolare)
● yG(t) contiene N costanti che si determinano imponendo le N condizioni iniziali
)1(01
1)1(
000
00
yy)y( −
−
−
=== N
t
N
N
t
Ydt
dY
dt
dYt L
costanti=− )1(0
)1(00 ,,, NYYY K (i loro valori possono essere ricavati
dai valori iniziali delle variabili di stato)
8
Determinazione della soluzione omogenea
● Se le soluzioni dell’equazione caratteristica λ1, ..., λN sono distinte yH(t) è una combinazione di funzioni esponenziali del tipo
k1, ..., kN rappresentano delle costanti da determinare imponendo le condizioni iniziali
0)y()y()y()y(
011
1
1 =++++ −
−
− tadt
tda
dt
tda
dt
tda
N
N
NN
N
N L
0011
1 =+λ++λ+λ −− aaaa N
NN
N L
Equazione omogenea associata
Equazione caratteristica
0)y()y(
λ→λ→ tdt
td ii
i
tN
tH
Nekekty λλ ++= L11)(

9
Determinazione della soluzione omogenea
● Se è presente una coppia di soluzioni complesse coniugate λh = σh + jωh e λh+1 = σh − jωh
nell’espressione di yH(t) compaiono i termini
Mediante la formula di Eulero si può esprimere la combinazione delle funzioni esponenziali complesse nella forma
dove Ah e ϕh sono due costanti reali
● Se sono presenti soluzioni multiple, per ogni soluzione λh di molteplicitàm nell’espressione di yH(t) compaiono i termini
Anche in questi casi le costanti da determinare per mezzo delle condizioni iniziali sono N
tmmh
th
th
hhh etktekek λ−−
λλ +++ 11,1,0, L
tjh
tjh
hh ekek )(*)( ω−σω+σ +
)cos( hht
h teA h ϕ+ωσ
10
Determinazione della soluzione particolare
● Nei casi di interesse pratico la soluzione particolare è una funzione dello stesso tipo del termine noto f(t)
Questo avviene quando f(t) appartiene ad una classe di funzioni, F, tale che ogni combinazione lineare di funzioni appartenenti a F e di loro derivate rispetto a t è ancora una funzione della classe F
● Esempi:costante: f(t) = Fpolinomio: f(t) = cntn + L + c1t + c0funzione sinusoidale di pulsazione ω: f(t) = FM cos(ωt + ϕ)
In questi casi si assume che la soluzione particolare yP(t) sia una funzione della stessa classe e si determinano le costanti contenute nella sua espressione imponendo che yP(t) soddisfi l’equazione differenziale

11
Stabilità
● Circuito asintoticamente stabile: tutte le soluzioni dell’equazione caratteristica hanno parte reale negativa
Per t → ∞ la risposta tende ad identificarsi con la soluzione particolare
Indipendentemente dallo stato iniziale, il circuito tende a portarsi in una condizione (condizione di regime) in cui la risposta dipende solo dagli ingressi
● Circuito semplicemente stabile: l’equazione caratteristica, oltre a eventuali soluzioni con parte reale negativa, ammette soluzioni semplici con parte reale nulla
Per t → ∞ la soluzione omogenea non si annulla, ma rimane limitata
● Circuito instabile: l’equazione caratteristica, ha almeno una soluzione con parte reale positiva o una soluzione multipla con parte reale nulla
Per t → ∞ la soluzione omogenea diverge
12
Stabilità dei circuiti passivi
● Un circuito formato da componenti passivi e generatori indipendenti èstabile
Tutte le soluzioni dell’equazione caratteristica hanno parte reale ≤ 0Eventuali soluzioni con parte reale nulla sono semplici
Dimostrazione
● L’integrale generale dell’equazione omogenea associata rappresenta l’insieme delle possibili risposte del circuito con i generatori azzerati(cioè dovute all’energia accumulata nel circuito all’instante iniziale)
● Se il circuito fosse instabile, la risposta con i generatori azzerati dovrebbe divergere per t → ∞
● In queste condizioni anche le energie assorbite o erogate dai componenti tenderebbero ad infinito
● Se tutti i componenti sono passivi questo è impossibile dato che l’energia accumulata nel circuito all’istante iniziale è finita e nessun componente è in grado di generare energia

13
Analisi in continua
● Ipotesi: tutti i generatori presenti nel circuito sono costantiil circuito è asintoticamente stabile
Per t → ∞ il circuito tende ad una condizione di regime nella quale tuttele tensioni e le correnti sono costanti (regime stazionario)
● In condizioni di regime stazionarioun condensatore si comporta come un circuito apertoun induttore si comporta come un cortocircuito
La determinazione della risposta a regime può essere ricondotta allo studio di un circuito resistivo (analisi in continua)
0i
v
0v
i
==
==
dt
dL
dt
dC
LL
CC
14
Regime sinusoidale
● Ipotesi:
Tutti i generatori indipendenti presenti nel circuito sono sinusoidali con la stessa pulsazione ωIl circuito è asintoticamente stabile
Per t → ∞ il circuito tende ad una condizione di regime nella quale tutte le tensioni e le correnti sono sinusoidali con pulsazione ω (regime sinusoidale)
● La soluzione particolare di un circuito dinamico corrispondente alla condizione di regime sinusoidale può essere determinata direttamente, senza utilizzare le equazioni differenziali, mediante il metodo simbolico

15
Analisi di transitori
Interruttori
● E’ assegnato un circuito che si trova in una condizione nota
tutte le tensioni e le correnti sono note, oppure sono note tutte le informazioni necessarie per calcolarle
● In un istante t0 il circuito viene perturbato, per esempio:dall’azionamento di uno o più interruttorida una variazione istantanea di uno più ingressi
● Si vuole determinare la risposta per t > t0
16
Discontinuità
● All’istante t0 alcune tensioni o correnti nel circuito possono essere discontinue
il loro valore per t = t0 non è definito● In questo caso si definiscono i valori relativi agli istanti t0
− e t0+
)f(lim)f(
)f(lim)f(
0
0
0
0
0
0
tt
tt
tttt
tttt
>→
+
<→
−
=
=

17
Dati iniziali e condizioni iniziali
● Se è noto il comportamento del circuito per t < t0 sono noti i valori delle tensioni e delle correnti all’istante t0
− (dati iniziali)
● Per risolvere l’equazione differenziale occorrono i valori delle tensioni o delle correnti (e delle loro derivate) all’istante t0
+ (condizioni iniziali)
Occorre stabilire una relazione tra i dati iniziali e le condizioni iniziali
● Proprietà di continuità
Se la corrente di un condensatore è limitata, la tensione è una funzione continua del tempo
Se la tensione di un induttore è limitata, la corrente è una funzione continua del tempo
● Per un circuito non degenere si può dimostrare che, se le grandezze impresse dei generatori sono limitate, le tensioni e le correnti di tutti i lati sono limitate e quindi valgono le proprietà di continuità
I valori delle variabili di stato all’istante t0+ coincidono con quelli a t0
−
18
Determinazione delle condizioni iniziali
Calcolo dei valori a t0+ delle tensioni e correnti
● Studiando il circuito per t = t0− si determinano i valori per t = t0
delle variabili di stato
● All’istante t0+, essendo note le tensioni dei condensatori e le
correnti degli induttori è possibile trattare
i condensatori come generatori indipendenti di tensione
gli induttori come generatori indipendenti di corrente
In questo modo si ottiene un circuito resistivo, studiando il quale si possono determinare i valori all’istante t0
+ delle altre tensioni e correnti

19
Determinazione delle condizioni iniziali
Calcolo dei valori a t0+ delle derivate delle tensioni e correnti
● Dalle relazioni costitutive dei condensatori e degli induttori si ha
La derivata per t0+ della tensione di un condensatore è nota se è
noto il valore a t0+ della corrente
La derivata per t0+ della corrente di un induttore è nota se è noto
il valore a t0+ della tensione
L
t
dt
d
dt
dLt
C
t
dt
d
dt
dCt
L
tt
LLL
C
tt
CCC
)(vii)(v
)(ivv)(i
0
0
0
0
+
=
+
=
=⇒=
=⇒=
+
+
20
Determinazione delle condizioni iniziali
Calcolo dei valori a t0+ delle derivate delle tensioni e correnti
● Per calcolare le derivate a t0+ delle altre tensioni e correnti
si ricavano le loro espressioni in funzione delle variabili di stato
si derivano le espressioni rispetto al tempo
si inseriscono nelle espressioni i valori delle derivate delle tensioni dei condensatori e delle correnti degli induttori calcolati come visto al punto precedente
● Iterando il procedimento è possibile calcolare i valori all’istantet0
+ delle derivate di ordine superiore

21
Circuiti elementari del primo ordine
● Circuiti del primo ordine: circuiti contenenti un solo induttore o un solo condensatore
La determinazione della risposta richiede la risoluzione di un’equazione differenziale del primo ordine
Circuito RC Circuito RL
22
Circuito RC – equazione in vC
● LKI:
● LKV:
● Componenti:
● All’equazione si deve associare una condizione iniziale del tipo
)i()(i)(i ttt CR ==)(v)(v)(v ttt GCR =+
)(v)(vv
ttdt
dRC GC
C =+
dt
dCt cv
)i( =
dt
dRCtRt c
R
v)i()(v ==
0)0(v CC V= (per semplicità si assume t0 = 0)

23
Circuito RC – equazione in i
● LKI:
● LKV:
● Componenti:
● La condizione iniziale può essere determinata a partire dal valore per t = 0 della variabile di stato
)(v)(v)(v ttt GCR =+)i()(i)(i ttt CR ==
)i()(v tRtR =
∫ ′′+=t
CC tdtC
t0
)i(1
)0(v)(v
)(v)i(1
)0(v)i(0
ttdtC
tR G
t
C =′′++ ∫ dt
dCt
dt
dRC Gv
)i(i
=+
R
V
RCGCG 0)0(v)0(v)0(v
)0i(−
=−
=++
+
24
Circuito RL – equazione in iL● LKI:
● LKV:
● Componenti:
● All’equazione si deve associare una condizione iniziale del tipo
)(i)(i)(i ttt GLR =+)v()(v(v ttt LR ==
dt
d
R
L
R
tt L
R
i)v()(i ==
)(i)(ii
ttdt
d
R
LGL
L =+
0)0(i LL I=
dt
dLt L
L
i)(v =
(per semplicità si assume t0 = 0)

25
Circuito RL – equazione in v
● LKI:
● LKV:
● Componenti:
● La condizione iniziale può essere determinata a partire dal valore per t = 0 della variabile di stato
)(i)(i)(i ttt GLR =+)v()(v)(v ttt LR ==
R
ttR
)v()(i =
∫ ′′+=t
LL tdtL
t0
)v(1
)0(i)(i
)(i)v(1
)0(i)v(
0
ttdtLR
tG
t
L =′′++ ∫ dt
dLt
dt
d
R
L Gi)v(v
=+
][][ )0(i)0(i)0(i)0v( 0+++ −=−= GLGL IRR
26
Equazione differenziale
● In generale, i circuiti del primo ordine sono descritti da equazioni del tipo
● f(t) = funzione lineare della grandezza impressa del generatore
● τ = costante di tempo
circuito RC τ = RC
circuito RL τ = L/R
⎪⎩
⎪⎨⎧
=
=τ
++
0)0(
)f()y(1y
Yy
ttdt
d
][][
][
][
][
][
][]][[ T
I
Q
V
Q
I
VCR ==×=
][][
][
][
][
][
][
][
][T
VV
I
IR
L=
Φ=×
Φ=

27
Determinazione della risposta
● L’integrale generale dell’equazione può essere espresso come
yH(t) = integrale generale dell’equazione omogenea associata
yP(t) = soluzione particolare dell’equazione differenziale
● La costante k si determina imponendo che y(t) soddisfi la condizione iniziale
L’espressione della soluzione è
)(y)(y)(y ttt PHG +=
τ−
=⇒=τ
+t
H kettdt
d)(y0)y(
1y
)0()0(y)0y( 00+++ −=⇒=+= PP yYkYk
[ ] )(y)0(y)y( 0 teYt P
t
P +−= τ−+
28
Soluzione particolare - Ingresso costante
● Ingresso costante: f(t) = F
● Si cerca una soluzione particolare costante: yP(t) = YP
● Si sostituisce yP(t) nell’equazione differenziale
L’espressione della risposta è
FYFYFtdt
dPPP
P τ=⇒=τ
⇒=τ
+1
)(y1y
( ) ( ) FeFYYeYYtt
P
t
P τ+τ−=+−= τ−
τ−
00)y(

29
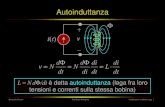
Risposta di un circuito del primo ordine
Ingresso costanteτ > 0
30
Risposta di un circuito del primo ordine
Ingresso costanteτ < 0

31
Componente transitoria e componente di regime
● Se τ > 0 il primo termine tende a zero per t → ∞componente transitoria
la componente transitoria dipende sia dall’ingresso che dallo stato iniziale
Per t → ∞ la risposta tende ad identificarsi con il secondo termine
componente di regime
la componente di regime dipende solo dall’ingresso
[ ]32144 344 21
)(y)0(y)y( 0 teYt P
t
P +−= τ−+
Componentetransitoria
Componentedi regime
32
Costante di tempo
● La costante di tempo è un indice della velocità con cui evolve il transitorio
● In un tempo pari alla costante di tempo la componente transitoria si riduce al 37% circa del suo valore iniziale
● In un tempo pari a 5τ si riduce a meno dell’1%del valore iniziale
● In un tempo pari a 7τ si riduce a meno dello0.1% del valore iniziale
In pratica si può assumere che il transitorio si esaurisca in un tempo dell’ordine di 5-7 voltela costante di tempo 0.00097τ
0.00256τ
0.00675τ
0.01834τ
0.04983τ
0.13532τ
0.3679τ1.00000
t τ− /te

33
Soluzione particolare - Ingresso sinusoidale
● Ingresso sinusoidale con pulsazione ω: f(t) = FM cos(ωt + ϕ)● Si cerca una soluzione particolare sinusoidale con pulsazione ω:
● Si sostituisce yP(t) nell’equazione differenziale
● Si applica la trasformata di Steinmetz al primo e al secondo membro dell’equazione differenziale
● Si determina il fasore di yP(t)
)cos()(y ϑ+ω= tYt Mp
FYY =τ
+ω PPj1
)f()(y1y
ttdt
dP
P =τ
+
ωτ+τ
=jp 1
FY
{ }{ } ϑ
ϕ
==
==j
MPP
jM
Yt
Ft
e)(y
e)f(
S
S
Y
F
34
Soluzione particolare - Ingresso sinusoidale
● Si antitrasforma:
● La soluzione particolare è
● Quindi la risposta completa è
[ ])arctg(cos1
)(y22
ωτ−ϕ+ωτω+
τ= t
Ft M
p
)arctg()1arg()arg()arg(1 22
ωτ−ϕ=ωτ+−==ϑτω+
τ==
FY
Y
P
MPM
FY
[ ] [ ])arctg(cos11
)arctg(cos)y(
22220 ωτ−ϕ+ωτω+
τ+⎥
⎦
⎤⎢⎣
⎡
τω+
ωτ−ϕτ−= τ
−t
Fe
FYt M
tM

35
Risposta di un circuito del primo ordine
Ingresso sinusoidaleτ > 0
36
Analisi di circuiti con un solo condensatore
● Mediante il teorema di Thévenin, è possibile ricondurre l’analisi del circuito al caso di un circuito RC elementare
L’equazione differenziale in vC è
⎪⎩
⎪⎨⎧
=τ
=τ
+
0
0
)0(v
)(v1
)(v1v
CC
CC
V
ttdt
dCReq=τ

37
Analisi di circuiti un solo condensatore
● L’espressione di vC è
● Se il generatore v0 è costante (v0(t) = V0), la soluzione particolare coincide con la tensione V0
● Nota vC(t), è possibile trattare il condensatore come un generatore indipendente di tensione
Le altre tensioni e correnti possono essere determinate risolvendo un circuito resistivo
[ ] )(v)0(v)(v 0 teVt P
t
PCC +−= τ−+ CReq=τ
[ ] 000)(v VeVVtt
CC +−= τ−
38
Analisi di circuiti con un solo induttore
● Mediante il teorema di Norton, in genere è possibile ricondurre l’analisi del circuito al caso di un circuito RL elementare
L’equazione differenziale in iL è
⎪⎩
⎪⎨⎧
=τ
=τ
+
0)0(i
)(i1
)(i1i
LL
ccLL
I
ttdt
d
eqR
L=τ

39
Analisi di circuiti un solo induttore
● L’espressione di iL è
● Se il generatore icc è costante (icc(t) = Icc), la soluzione particolare coincide con la tensione Icc
● Nota iL(t), è possibile trattare l’induttore come un generatore indipendente di corrente
Le altre tensioni e correnti possono essere determinate risolvendo un circuito resistivo
[ ] )(i)0(i)(i 0 teIt P
t
PLL +−= τ−+
eqR
L=τ
[ ] cc
t
ccLL IeIIt +−= τ−
0)(i
40
Risposte di un circuito del primo ordine
● I metodi di analisi basati sui teoremi di Thévenin e Norton, mostrano che tutte le risposte sono combinazioni
di una funzione esponenziale con la stessa costante di tempo τdi un termine dipendente dagli ingressi (risposta a regime)
● Tutte le risposte sono funzioni del tipo
come caso particolare, è possibile che per qualche risposta uno dei due addendi sia identicamente nullo
● Nei casi in cui è possibile determinare yP(t) senza utilizzare l’equazione differenziale (es. ingressi costanti o sinusoidali) è possibile formulare un metodo diretto, che non richiede l’impiego di equazioni differenziali, anche per la valutazione della risposta completa
[ ] )(y)0(y)y( 0 teYt P
t
P +−= τ−+

41
Analisi di circuiti del primo ordine – Metodo diretto
● Mediante un’analisi per t = 0− si determina il valore iniziale della variabile di stato ( vC(0) o iL(0) )
● All’istante t = 0+ si sostituisceil condensatore con un generatore di tensione pari a vC(0)l’induttore con un generatore di corrente pari a iL(0)
e studiando il circuito resistivo così ottenuto si determina Y0 = y(0+)
● Si determina la soluzione particolare yP(t)con un’analisi in continua se i generatori sono costanticon il metodo simbolico se sono sinusoidali
● Si determina la resistenza equivalente della parte resistiva del circuito con i generatori indipendenti azzerati e quindi si calcola la costante di tempo (τ = ReqC o τ = L / Req)
● Si inseriscono i risultati nell’espressione
[ ] )(y)0(y)y( 0 teYt P
t
P +−= τ−+
42
Circuiti elementari del secondo ordine
● Circuiti del secondo ordine: circuiti contenenti due bipoli dinamici
La determinazione della risposta richiede la risoluzione di un’equazione differenziale del secondo ordine
Circuito RLC serie Circuito RLC parallelo

43
Circuito RLC serie
● LKI:
● LKV:
● Componenti:
)(i)(i)(i ttt RLC ==)(v)(v)(v)(v tttt GCLR =++
dt
dCt C
C
v)(i =
dt
dRCtRt C
RR
v)(i)(v ==
)(v)(vvv
2
2
ttdt
dRC
dt
dLC GC
CC =++
2
2 vi)(v
dt
dLC
dt
dLt CL
L ==
44
Circuito RLC serie
● All’equazione si devono associare le condizioni iniziali relative al valore all’istante t = 0 della tensione vC e della sua derivata
● Quest’ultima condizione può essere ottenuta a partire dai valori iniziali delle variabili di stato
infatti si ha0
0
)0(i
)0(v
LL
CC
I
V
==
)(i)(i
v)(i
ttdt
dCt
LC
CC
=
=
C
I
CCdt
d LLC
t
C 0
0
)0(i1
)0(i1v
====

45
Circuito RLC parallelo
● LKI:
● LKV:
● Componenti:
)(v)(v)(v ttt RLC ==)(i)(i)(i)(i tttt GCLR =++
dt
dLt L
L
i)(v =
dt
d
R
L
R
tti LR
R
i)(v)( ==
)(i)(iii
2
2
ttdt
d
R
L
dt
dLC GL
LL =++
2
2 iv)(i
dt
dLC
dt
dCt LC
C ==
46
Circuito RLC parallelo
● All’equazione si devono associare le condizioni iniziali relative al valore all’istante t = 0 della corrente iL e della sua derivata
● Quest’ultima condizione può essere ottenuta a partire dai valori iniziali delle variabili di stato
infatti si ha0
0
)0(i
)0(v
LL
CC
I
V
==
)(v)(v
i)(v
ttdt
dLt
CL
LL
=
=
L
V
LLdt
d CCL
t
L 0
0
)0(v1
)0(v1i
====

47
Circuiti del secondo ordine
● I circuiti del 2° ordine sono descritti da equazioni differenziali del tipo
● α = coefficiente di smorzamento
circuito RLC serie
circuito RLC parallelo
● ω0 = pulsazione naturale
circuito RLC serie e parallelo
⎪⎪
⎩
⎪⎪
⎨
⎧
′=
=
=ω+α+
=
+
00
0
202
2
y)0y(
)f()y(y
2y
Ydt
dY
ttdt
d
dt
d
t
L
R
2=α
LC
120 =ω
RC2
1=α 0,0,0 >>> CLR
0,0 20 >ω>α
48
Risposta di un circuito del secondo ordine
● Integrale generale dell’equazione differenzialey(t) = yH(t) + yP(t)
yH(t) = integrale generale dell’equazione omogenea associata
yP(t) = soluzione particolare dell’equazione differenziale
● Per determinare yH(t) si risolve l’equazione caratteristica
● Si distinguono tre casi caratterizzati da valore positivo, nullo o negativo del discriminante
02 20
2 =ω+αλ+λ
20
2 ω−α=Δ

49
Caso sovrasmorzato
● L’equazione caratteristica ha due soluzioni reali distinte
Se α > 0, dato che αd < α , risulta λ1, λ2 ≤ 0
● Integrale generale dell’equazione omogenea associata:
● Espressione della risposta:
k1 e k2 si determinano imponendo le condizioni iniziali
2
120
221, α−
α−=α±α−=ω−α±α−=λλ d
020
2 >Δ⇒ω>α
)(y)y( 2121 tekekt p
tt ++= α−α−
ttH ekekt 21
21)(y α−α− +=
50
Risposta di un circuito del secondo ordine
Caso sovrasmorzatoIngresso costante

51
Risposta di un circuito del secondo ordine
Caso sovrasmorzatoIngresso costante
52
Smorzamento critico
● L’equazione caratteristica ha due soluzioni reali coincidenti
Anche in questo caso se α > 0, le soluzioni sono negative
● Integrale generale dell’equazione omogenea associata:
● Espressione della risposta:
k1 e k2 si determinano imponendo le condizioni iniziali
α−=λ=λ 21
020
2 =Δ⇒ω=α
)(y)y( 21 ttekekt ptt ++= α−α−
ttH tekekt α−α− += 21)(y

53
Risposta di un circuito del secondo ordine
Smorzamento criticoIngresso costante
54
Risposta di un circuito del secondo ordine
Smorzamento criticoIngresso costante

55
Caso sottosmorzato
● L’equazione ha due soluzioni complesse coniugate
● Integrale generale dell’equazione omogenea associata:
● Affinché yH(t) sia reale occorre che sia
● Si pone
djj ω±α−=α−ω±α−=λλ 22021,
020
2 <Δ⇒ω<α
tjtjH
dd ekekt )(2
)(1)(y ω−α−ω+α− +=
*12 kk =
ϕ−ϕ =⇒≥∈ϕ= jj eA
kARAeA
k2
)0,,(2 21
56
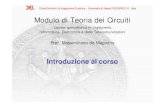
Caso sottosmorzato
● Utilizzando la formula di Eulero si ottiene
Espressione della risposta:
Anche in questo caso si devono determinare due costanti reali ( A e ϕ ) imponendo le condizioni iniziali
)(y)cos()y( ttAet pdt +ϕ+ω= α−
( )ϕ+ω=
=⎥⎦
⎤⎢⎣
⎡ +=
=⋅+⋅=
=+=
α−
ϕ+ω−ϕ+ωα−
ω−α−ϕ−ω+α−ϕ
ω−α−ω+α−
tAe
eeAe
eeA
eeA
ekekty
dt
tjtjt
tjjtjj
tjtjH
dd
dd
dd
cos
2
22
)(
)()(
)()(
)(2
)(1

57
Risposta di un circuito del secondo ordine
Caso sottosmorzatoIngresso costante
58
Caso senza perdite
● Come indica la denominazione, questo caso corrisponde all’assenza di componenti in grado di dissipare energia
00,0 20
2 <Δ⇒>ω=α
02
0 →=α⇒→L
RR 0
2
1→=α⇒∞→
RCR
RLC serie → LC serie RLC parallelo → LC parallelo

59
Caso senza perdite
● L’equazione caratteristica ha due soluzioni immaginarie coniugate
● L’integrale generale dell’equazione omogenea è una funzione sinusoidale di pulsazione ω0
non si annulla per t → ∞ ma rimane limitata
● Espressione della risposta:
021 ω±=λ=λ j
)(y)cos()y( 0 ttAt P+ϕ+ω=
00,0 20
2 <Δ⇒>ω=α
)cos()(y 0 ϕ+ω= tAtH
60
Risposta di un circuito del secondo ordine
Caso senza perditeIngresso costante