U S Corso di Laurea in Fisica - Istituto Nazionale di ... 1.3 Algebra dei tensori Il prossimo passo...
78
Università degli Studi di Perugia Corso di Laurea in Fisica Buchi Neri Laureando: Stefano Speziali Relatore: Prof. Gianluca Grignani A.A. 2012/2013
Transcript of U S Corso di Laurea in Fisica - Istituto Nazionale di ... 1.3 Algebra dei tensori Il prossimo passo...
Università degli Studi di Perugia
Corso di Laurea in Fisica
Buchi Neri
Laureando:Stefano Speziali
Relatore:Prof. Gianluca Grignani
A.A. 2012/2013

Alla mia famiglia.

“Sottile è il Signore..”
Albert Einstein
SommarioNel presente lavoro vengono esposti i risultati fondamentali della teoria della
gravitazione su scala relativistica e, in particolare, si studiano una classe di oggettiprevisti dalla teoria stessa: i buchi neri. Dapprima si studiano quei buchi neri che sonodotati solamente di massa. Si generalizzano poi i risultati al caso di buchi neri cheposseggono anche una carica e un momento angolare.

Indice
1 Richiami di Relatività Generale 11.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Vettori e tensori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Algebra dei tensori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4 Derivata covariante e tensore di curvatura . . . . . . . . . . . . . . . . . 61.5 Metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.6 Simmetrie e derivata di Lie . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Equazioni di campo di Einstein 162.1 Il campo gravitazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2 Tensore energia impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.3 Equazioni di Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Buco Nero di Schwarzschild 213.1 Soluzione di Schwarzschild . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Collasso gravitazionale di un corpo sferico . . . . . . . . . . . . . . . . . 243.3 Buchi neri e buchi bianchi . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.4 Coordinate di Kruskal-Szekeres . . . . . . . . . . . . . . . . . . . . . . . . 283.5 Singolarità e completezza geodetica . . . . . . . . . . . . . . . . . . . . . 303.6 Massima estensione analitica . . . . . . . . . . . . . . . . . . . . . . . . . 313.7 Ipersuperfici nulle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.8 Orizzonti di Killing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Gravità superficiale sulla sfera di Schwarzschild . . . . . . . . . . . . . . 34Normalizzazione della gravità superficiale . . . . . . . . . . . . . . . . . 35
3.9 Spaziotempo di Rindler . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.10 Accelerazione sull’orizzonte . . . . . . . . . . . . . . . . . . . . . . . . . . 373.11 Diagrammi di Carter-Penrose . . . . . . . . . . . . . . . . . . . . . . . . . 383.12 Singolarità nude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Buchi Neri Carichi 454.1 Soluzione di Reissner-Nordstrom . . . . . . . . . . . . . . . . . . . . . . . 454.2 Singolarità nude in RN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.3 Coordinate di Kruskal in RN . . . . . . . . . . . . . . . . . . . . . . . . . 48
Collasso a simmetria sferica di un buco nero carico . . . . . . . . . . . . 524.4 Buchi Neri estremi di RN . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
v

5 Buchi Neri Rotanti 555.1 Teoremi di unicità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.2 Soluzione di Kerr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.3 Singolarità nude nella metrica di Kerr . . . . . . . . . . . . . . . . . . . . 58
Struttura Causale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.4 Coordinate di EF in Kerr e buchi neri estremi . . . . . . . . . . . . . . . 61
Velocità angolare dell’orizzonte . . . . . . . . . . . . . . . . . . . . . . . . 63Buchi neri estremi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.5 Ergosfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 645.6 Processo Penrose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
A Esempi svolti 66A.1 Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66A.2 Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68

Notazioni
In questo lavoro adotteremo il sistema di unità naturale.
c 2.998 ×108 ms velocità della luce
h 6.626 ×10−34 J · s costante di Planck
h 1.054 ×10−34 J · s costante di Planck ridotta
e -1.602 ×10−19 C carica dell’elettrone
me 9.109 ×10−31 kg massa dell’elettrone
G 6.677 ×10−11 m3
kg·s2 costante di gravitazione universale
vii

Capitolo 1
Richiami di Relatività Generale
1.1 Introduzione
La teoria Speciale della Relatività ha due limitazioni: in primo luogo, privilegiauna categoria particolare di sistemi di riferimento, quelli inerziali; in secondoluogo, non descrive i fenomeni gravitazionali. In particolare la gravità di Newtonnon è compatibile con il nuovo principio di relatività di Einstein per duemotivi: il primo è che, secondo la relatività speciale, nessuna informazione puòviaggiare più veloce della luce, mentre invece secondo la teoria di Newton laforza di gravità ha effetto istantaneo; il secondo è che la legge di gravitazioneuniversale non è invariante rispetto alle trasformazioni di Lorentz, cioè la forzadi gravità non rispetta il nuovo principio di relatività.
È necessaria quindi un’estensione della teoria che, da un lato, non discriminitra osservatori inerziali e osservatori accelerati, dall’altro, incorpori la gravità.Una tale estensione avvenne ad opera dello stesso Einstein in un articolo del1916, in cui veniva presentata la teoria Generale della Relatività.
Le due limitazioni della relatività speciale sono in realtà collegate: non èpossibile, infatti, descrivere gli effetti della gravità senza prendere in considera-zione sistemi di riferimento non inerziali. Uno degli elementi essenziali dellateoria è l’equivalenza fra massa inerziale e massa gravitazionale, che fa si che tutti icorpi cadano con la stessa accelerazione. L’altro elemento peculiare della teoriaè la nuova concezione tra geometria e fisica: la natura dello spaziotempo è parteintegrante della soluzione del problema del moto. Diceva a tal proposito JohnA. Wheeler: “Lo spaziotempo dice alla materia come muoversi; la materia dice allospaziotempo come curvarsi.”
Possiamo riassumere, quindi, le idee e i princìpi che sono alla base dellateoria della relatività generale nei seguenti 4 punti:
1
Capitolo 1. Richiami di Relatività Generale
1. Principio di equivalenza. Secondo questo principio la massa inerziale di uncorpo può essere sempre scelta in modo da uguagliare la corrispondentemassa gravitazionale. In tutti gli esperimenti svolti fino ad ora il rapportotra massa gravitazionale di un corpo, cioè la massa che compare nell’e-spressione della forza di Newton, e la sua massa inerziale, cioè la massache compare nella seconda legge di Newton, è costante (entro l’erroresperimentale) e indipendente dal corpo stesso. Ciò implica che nessunesperimento locale è in grado di distinguere un moto di caduta libera inun campo gravitazionale da un moto uniformemente accelerato in assenzadel campo. In modo analogo nessun esperimento locale può distinguerelo stato di quiete in un campo gravitazionale costante da quello che siosserverebbe in un sistema in moto uniformemente accelerato in assenzadel campo.
2. Principio di covarianza. Nella teoria speciale della relatività tutti gli osser-vatori inerziali sono equivalenti. Nella teoria generale questo fatto vieneesteso a tutti i tipi di osservatori. Le leggi della fisica hanno quindi lastessa forma per tutti gli osservatori, inerziali e non inerziali.
3. Principio di corrispondenza. In presenza di campi gravitazionali deboli enel limite di basse velocità (rispetto a quella della luce), la teoria generaledeve fornire dei risultati che sono approssimabili dalla teoria della gravitàdi Newton. In assenza di campo gravitazionale le predizioni della teoriagenerale devono essere in linea con quelli della relatività speciale.
4. Principio di minimo accoppiamento gravitazionale. Questo principio affermache nel passaggio dalla teoria speciale a quella generale non bisognaaggiungere nessun termine che tenga conto, in forma esplicita, dellacurvatura dello spaziotempo.
In base a quanto appena detto, è necessario, a questo punto, introdurregli elementi essenziali necessari a sviluppare la geometria quadridimensionalein una forma valida in coordinate arbitrarie. Il linguaggio che più si presta aquesto scopo è quello della geometria differenziale e, in particolare, quello deitensori.
1.2 Vettori e tensori
Una varietà differenziabile quadridimensionaleM è essenzialmente uno spaziotopologico ricoperto da sistemi locali di coordinate (carte) che associano ad
2

Capitolo 1. Richiami di Relatività Generale
ogni suo punto (o evento) una quaterna xµ = (x0, x1, x2, x3), in modo tale chenella regione di sovrapposizione di due di queste carte l’applicazione che fapassare dall’una all’altra sia differenziabile. In particolare, nella regione disovrapposizione di due carte, i differenti sistemi di coordinate sono collegatida una trasformazione generale di coordinate (GCT) x′µ(x). Solo oggetti con buoneproprietà di trasformazione sotto GCT possono essere definiti su una varietà.Questi oggetti sono i tensori.
Un campo vettoriale controvariante (o tensore di tipo (1, 0) o semplicemente“vettore”) ξ(x) = ξµ(x)∂µ è definito in ogni punto di una varietà differenziabiledalla sua azione su una funzione f
ξ : f → ξ f = ξµ∂µ f (1.2.1)
che definisce un’altra funzione. Questi oggetti generano uno spazio vettorialequadridimensionale lineare in ogni punto della varietà chiamato spazio tangenteT (1,0)
p (M). Le funzioni ξµ(x) sono le componenti del vettore rispetto alla basecoordinata ∂µ.
Un campo vettoriale covariante (o tensore di tipo (0, 1) o “1-forma differen-ziale”) è un elemento dello spazio duale (a volte chiamato spazio cotangente)T (0,1)
p (M) e, quindi, un funzionale lineare dello spazio tangente che trasformavettori in funzioni. Gli elementi della base duale della base coordinata dei vettoricontrovarianti sono, in genere, denotati con dxµ e, per definizione,
〈dxµ|∂ν〉 ≡ δµν (1.2.2)
che implica che l’azione di una forma ω = ωµdxµ su un vettore ξ(x) = ξµ(x)∂µ
dia come risultato la funzione
〈ω|ξ〉 = ωµξµ (1.2.3)
Sotto GCT vettori e forme trasformano come trasformano le funzioni, cioèξ ′(x′) = ξ(x(x′)) etc., che implica che le loro componenti, rispetto alla basecoordinata associata, trasformano in accordo con le leggi
ξ ′ρ(x′) =∂x′ρ
∂xµ ξµ(x(x′)) (1.2.4)
eω′ρ(x′) =
∂xµ
∂x′ρωµ(x(x′)) . (1.2.5)
3

Capitolo 1. Richiami di Relatività Generale
Più in generale un tensore di tipo (q,r) può essere definito come un elementodello spazio T (q,r)
p (M) dato dal prodotto tensoriale di q copie dello spaziotangente e r copie dello spazio cotangente. Le sue componenti trasformano inaccordo con la legge
T′µ1...µqν1...νr
(x′) =∂x′µ1
∂xρ1 . . .∂x′µq
∂xρq
∂xσ1
∂x′ν1. . .
∂xσr
∂x′νrTρ1...ρq
σ1...σq(x(x′)) . (1.2.6)
Consideriamo ora una curva γ(λ) inM, cioè una mappa da un intervalloreale inM. Si definisce vettore tangente alla curva γ(λ) nel punto γ(λ0) il vettore( d
dλ )γ(λ0). Da quanto detto sopra, il vettore tangente a una curva può esserepensato come l’operatore che mappa ogni funzione f , definita in un intorno diγ(λ0), in d f
dλ (γ(λ0));d fdλ (γ(λ)) è la derivata di f nella direzione di γ(λ) rispetto
al parametro λ. Esplicitamente si ha( d fdλ
)γ(λ)
= limη→0
1η f (γ(λ + η))− f (γ(λ)) (1.2.7)
Se si utilizza un sistema di coordinate locali in un intorno di γ(λ0)
d fdλ
(γ(λ0)
)=
dxµ
dλ(λ0)∂µ f (γ(λ0)) (1.2.8)
Dall’ultima relazione, in particolare, si vede che il vettore tangente a una curvapuò essere sempre scritto, rispetto a una base coordinata, come( d
dλ
)γ(λ)
=dxµ
dλ∂µ , (1.2.9)
dove le dxµ
dλ sono le componenti del vettore. Approfondiremo in seguito il ruolodelle curve e, in particolare, delle geodetiche (curve con un ruolo speciale) inrelatività generale.
1.3 Algebra dei tensori
Il prossimo passo nel costruire equazioni che siano invarianti sotto GCTè quello di stabilire quale sia l’algebra dei tensori, cioè come questi possanoessere combinati per dare altri tensori. In particolare si definiscono
4

Capitolo 1. Richiami di Relatività Generale
1. Combinazione Lineare. Una combinazione lineare di tensori dello stesso tipodà, come risultato, ancora un tensore dello stesso tipo. Infatti presi duetensori di tipo (1,1), A e B, con componenti rispetto alla base coordinataAµ
ν e Bµν , si può definire il tensore T, sempre di tipo (1,1) con componenti
Tµν , in base alla relazione
Tµν = aAµ
ν + bBµν , (1.3.1)
dove a e b sono scalari; si dimostra facilmente che le componenti di Ttrasformano in accordo con la legge
T′µν =∂x′µ
∂xρ
∂xσ
∂x′νTρ
σ .
2. Prodotto Diretto. È possibile anche moltiplicare due tensori tramite prodottodiretto (o tensoriale). Moltiplicando un tensore di tipo (q,r) e un tensore ditipo (l,m) si ottiene un tensore di tipo (q+l,r+m). Se riprendiamo i tensoridell’esempio precedente possiamo formare un nuovo tensore, R, che hacomponenti date dalla relazione
Rµν
ρ = AµνBρ .
Anche in questo caso è possibile dimostrare che le componenti di Rtrasformano in accordo con la regola generale (1.2.6).
3. Contrazione. La contrazione di un tensore T di tipo (q,r), con componen-ti Tµ1...µq
ν1...νr, rispetto al primo indice controvariante e il primo indice
covariante è un tensore di tipo (q-1,r-1) le cui componenti sono date daTµ1...µq
µ1...νr. In generale è possibile contrarre un tensore su una qualsiasi
coppia di indici controvarianti e covarianti.
Queste tre operazioni possono anche essere combinate in vari modi.
Si definisce parte simmetrica di un tensore T di tipo (2,0) il tensore TS cheha per componenti
T(µν) =12!Tµν + Tνµ . (1.3.2)
In modo simile, la parte antisimmetrica, TA del tensore T ha per componenti
T[µν] =12!Tµν − Tνµ . (1.3.3)
5

Capitolo 1. Richiami di Relatività Generale
In generale, le componenti della parte simmetrica o antisimmetrica di un tensoreT verranno denotati con una parentesi tonda o una parentesi quadra intornoagli indici. Così
Tµ1...µq(ν1...νr)
=
1r!somma su tutte le permutazioni degli indici ν1 . . . νr (Tµ1...µq
ν1...νr)
(1.3.4)
e
Tµ1...µq[ν1...νr]
=
1r!somma alternante su tutte le permutazioni degli indici ν1 . . . νr (Tµ1...µq
ν1...νr) .
(1.3.5)Un tensore è detto simmetrico, rispetto a un insieme di indici controvarianti
o covarianti, se è uguale alla sua parte simmetrizzata su questi indici; è dettoantisimmetrico se è uguale alla sua parte antisimmetrizzata. Per esempio, untensore T di tipo (0,2) è simmetrico se T(µν) = Tµν (e quindi T[µν] = 0).
1.4 Derivata covariante e tensore di curvatura
Il calcolo tensoriale su una varietà generica presenta un’importante differen-za rispetto al calcolo tensoriale nello spazio di Minkowski. Infatti, le derivatedelle componenti Tµ1...µq
ν1...νrdi un tensore T generico, non costituiscono più
le componenti di un tensore. Per vedere ciò, prendiamo in considerazione uncampo vettoriale ξ e le sue componenti ξµ(x). Le leggi di trasformazione delleξµ(x) sono date dalla (1.2.4). Derivando quest’ultima rispetto a x′λ si ottiene
∂ξ ′ρ
∂x′λ=
∂x′ρ
∂xµ
∂xσ
∂x′λ∂ξµ
∂xσ+
∂2x′ρ
∂xσ∂xµ
∂xσ
∂x′λξµ . (1.4.1)
Il primo termine del membro di destra è quello che ci aspetteremmo se le∂ξρ
∂xλ fossero le componenti di un tensore, mentre il secondo termine è quelloche delude le nostre aspettative. È necessario estendere la nozione di derivata.Definiamo, quindi, la derivata covariante di un campo vettoriale, la quantità
∇µξν = ∂µξν + Γνµρξρ , (1.4.2)
dove Γ è la connessione affine ed è aggiunta alla derivata parziale in modo che laderivata covariante di un tensore trasformi effettivamente come un tensore.
6

Capitolo 1. Richiami di Relatività Generale
Il fatto che le∇µξν siano effettivamente le componenti di un tensore permettedi stabilire quale siano le leggi di trasformazione della connessione. Partendo,infatti, dall’uguaglianza Γν
µρξρ =∇µξν − ∂µξν, è facile vedere che Γ trasformain accordo con
Γ′νµρ =∂x′ν
∂xη
∂xσ
∂x′ρ∂xτ
∂x′µΓη
τσ −∂2x′ν
∂xτ∂xσ
∂xσ
∂x′ρ∂xτ
∂x′µ, (1.4.3)
in particolare si vede che neanche la connessione trasforma come un tensore.
Possiamo inoltre definire la derivata covariante di una 1-forma seguendo unragionamento analogo a quello precedente. In particolare
∇µων = ∂µων − Γλµνωλ . (1.4.4)
È ovvio che queste definizioni possono essere estese a tensori generici. Laderivata covariante rispetto a xρ di un tensore generico T...
... è uguale a ∂T......
xρ ,più, per ogni indice controvariante µ, un termine dato da Γµ
νρ volte T con µ
sostituito da ν, meno, per ogni indice covariante λ, un termine dato da Γκλρ
volte T con λ sostituito da κ. Per esempio,
∇ρTµσλ =
∂Tµσλ
∂xρ + ΓµρνTνσ
λ + ΓσρνTµν
λ − ΓκλρTµσ
κ . (1.4.5)
Fino a questo momento non è stata fatta nessuna ipotesi sulla connessione.D’ora in avanti, invece, richiederemo che essa sia simmetrica, cioè
Γµρν = Γµ
νρ . (1.4.6)
In questo contesto le Γ sono anche chiamati simboli di Christoffel.
La combinazione della derivata covariante con le proprietà algebriche de-finite nella sezione 3 dà risultati simili a quelli della derivazione ordinaria. Inparticolare la derivata covariante è un operatore lineare, soddisfa la regola diLeibniz per il prodotto (diretto) di tensori e, inoltre, commuta con la contrazione.
Consideriamo ora una curva γ(λ) inM e sia V il suo vettore tangente inogni punto. Se T è un campo tensoriale di tipo (q,r) definito lungo la curvaγ(λ), si definisce derivata covariante di T lungo γ(λ) la quantità
DTµ1...µqν1...νr
dλ= Vρ ∇ρTµ1...µq
ν1...νr. (1.4.7)
7

Capitolo 1. Richiami di Relatività Generale
Se si utilizza un sistema di coordinate locali, in modo che la curva γ(λ) sia de-scritta da equazioni del tipo xµ = xµ(λ), allora Vρ = dxρ
dλ e l’equazione precedentesi riscrive come
DTµ1...µqν1...νr
dλ=
dxρ
dλ∇ρTµ1...µq
ν1...νr. (1.4.8)
Il tensore T è detto essere trasportato parallelamente lungo γ seDTµ1...µq
ν1...νrdλ = 0.
Data una curva γ(λ) con estremi p e s, la teoria delle soluzioni delle equazionidifferenziali ordinarie ci dice che esiste un unico tensore in s ottenuto traspor-tando parallelamente un dato tensore in p lungo γ. Il trasporto parallelo lungoγ, quindi, è una mappa lineare da T (q,r)
p (M) a T (q,r)s (M) che preserva tutti i
prodotti tensoriali e contrazioni.Un caso particolare si ottiene considerando la derivata covariante del vettore
tangente stesso lungo γ. La curva γ è detta geodetica se DVρ
dλ è parallelo a Vρ,cioè se esiste una funzione f (anche nulla) tale che
DVρ
dλ= f Vρ . (1.4.9)
Anticipiamo il fatto che l’equazione (1.4.9) corrisponde all’equazione del motoper una particella di massa m che si muove su γ.
Consideriamo ora il seguente fatto: se si trasporta parallelamente un vettoreξ definito inizialmente in p lungo la curva γ che termina ancora in p si ottieneun vettore ξ ′ in p che, in generale, sarà diverso da ξ; se si sceglie una curvadifferente γ′, il nuovo vettore che si ottiene in p è in generale diverso da ξ eξ ′. Ciò è dovuto sostanzialmente al fatto che le derivate covarianti, in genere,non commutano. Il tensore di curvatura di Riemann dà una misura di questa noncommutatività. Il tensore di Riemann, R, è un tensore di tipo (1,3) e può esseredefinito dalla relazione
Rµνρσξν =∇ρ∇σξµ −∇σ∇ρξµ . (1.4.10)
che vale per ogni campo vettoriale ξ. Valutando esplicitamente il membro didestra si trova che
Rµνρσ = Γµ
νσ, ρ − Γµνρ, σ + Γµ
ηρΓηνσ − Γµ
ησΓηνρ . (1.4.11)
Da questa definizione di evince che il tensore di Riemann ha le seguentisimmetrie
Rµνρσ = −Rµ
νσρ (1.4.12)
8

Capitolo 1. Richiami di Relatività Generale
eRµ
[νρσ] = 0. (1.4.13)
Con un calcolo un po’ più elaborato, invece, si verifica che il tensore di Riemannsoddisfa l’identità di Bianchi
Rµν[ρσ;λ] = 0, (1.4.14)
dove Rµνρσ;λ ≡∇λRµ
νρσ.
Un’altra proprietà importante del tensore di Riemann è che il trasportoparallelo è localmente integrabile (cioè ξ ′ è uguale a ξ per ogni punto p di M)solo se Rµ
νρσ = 0 in ogni punto di M; in questo caso la connessione è dettaessere piatta.
Contraendo il tensore di curvatura, si può definire il tensore di Ricci cometensore di tipo (0,2) con componenti
Rµν = Rλµλν . (1.4.15)
Il tensore di Ricci, come si vedrà nel prossimo capitolo, gioca un ruolofondamentale nelle equazioni di campo di Einstein.
1.5 Metrica
Per andare avanti nella costruzione del formalismo della relatività generaleabbiamo bisogno di introdurre una struttura sulla varietà: la metrica, cioè unprodotto interno per i vettori dello spazio tangente (simmetrico e bilineare)che associ una funzione g(ξ,ε) ad ogni coppia di vettori ξ e ε. Tutto ciò èequivalente a definire un tensore g, di tipo (0,2), simmetrico rispetto alle suecomponenti covarianti gµν = g(µν) :
ξ · ε ≡ g(ξ,ε) = gµνξµεν (1.5.1)
Il quadrato della norma di un vettore è semplicemente il prodotto del vettorecon se stesso, ξ2 = ξ · ξ. La metrica è richiesta essere non singolare, cioè
g ≡ det(gµν) 6= 0 (1.5.2)
e, in virtù del Principio di equivalenza, localmente diagonalizzabile; deve, cioè,
9

Capitolo 1. Richiami di Relatività Generale
essere sempre possibile trovare un sistema di coordinate per cui
gµν = ηµν ≡ diag(−1,+1,+1,+1) (1.5.3)
In 4 dimensioni si ha che
sign(g) =g|g| = −1 (1.5.4)
La metrica può anche essere utilizzata per stabilire una corrispondenza tralo spazio tangente e il suo duale, cioè tra vettori e 1-forme: ad ogni vettoreξµ associamo una 1-forma ωµ la cui azione su un qualsiasi altro vettore ηµ èil prodotto di ξ e η, ω(η) = gµνξµην. Ciò implica la relazione tra componentiων = ξµgµν . È consuetudine indicare questa 1-forme con ξµ e la trasformazioneda vettori a 1-forme si ottiene “abbassando” l’indice. La metrica inversa puòessere usata come metrica nello spazio cotangente. Le sue componenti sonole componenti della matrice inversa di gµν e vengono denotati con indici alti.L’operazione di “innalzamento” può essere definita in modo simile e la consi-stenza dell’operazione è garantita dal fatto che il duale del duale è lo spaziovettoriale di partenza. La generalizzazione delle operazioni di “innalzamento”e “abbassamento” per tensori generici è ovvia.
Con la metrica è possibile anche definire la lunghezza di una curva γ, xµ(λ),grazie all’integrale
s =∫
γdλ√|gµν xµ xν| , (1.5.5)
dove il punto indica la derivata rispetto a λ. In relatività si è soliti indicare ilquadrato dell’elemento di “distanza” con
ds2 = gµνdxµdxν . (1.5.6)
La segnatura di una metrica in p è il numero di autovalori positivi dellamatrice gµν in p, meno il numero di autovalori negativi della stessa matrice.Una metrica con segnatura 2, ovunque su M, è detta Lorentziana. Con unametrica Lorentziana tutti i vettori possono essere divisi in tre classi: vettori ditipo tempo, tipo luce (o nulli) e tipo spazio a seconda che il quadrato della normadel vettore sia, rispettivamente, negativo, nullo o positivo.
Le equazioni che governano il moto della materia devono essere tali che,presi due punti (o eventi) p e q diM, è possibile mandare un segnale da p a q se
10

Capitolo 1. Richiami di Relatività Generale
e solo se, questi, possono essere uniti da una curva il cui vettore tangente (nonnullo) è di tipo tempo o luce. Una tale curva è detta essere di tipo tempo o nullo,rispettivamente. Per una particella di massa m, che si muove su γ, definiamoil tempo proprio (cioè il tempo che misura un orologio solidale con la particellastessa) la quantità
dτ =√−ds2 . (1.5.7)
Finora abbiamo parlato della connessione e della metrica come struttureindipendenti e separate dalla varietà. Nella teoria standard della gravitazione lametrica e la connessione non sono, in realtà, indipendenti. Infatti si assume chela derivata covariante della metrica sia sempre nulla
gµν;ρ = 0. (1.5.8)
Non è difficile vedere che la (1.5.8) implica
Γµνρ =
12
gµσ(
gσν,ρ + gρσ,ν − gνρ,σ). (1.5.9)
Così, la connessione e, quindi, tutte le quantità definite nella sezione precedente,sono completamente determinate dalla metrica. In particolare, scegliendo unsistema di coordinate locali per cui gµν si riduca alla forma diagonale (1.5.3), inun intorno sufficientemente piccolo di un punto p della varietà, la connessionerisulta identicamente nulla e l’equazione delle geodetiche (1.4.9) si riduce (conuna ridefinizione del parametro λ in modo che la f che compare nell’equazionesi annulli) ad essere, semplicemente, l’equazione
dVµ
dλ= 0 , (1.5.10)
che corrisponde all’equazione di un moto rettilineo uniforme nello spazio diMinkowski (V è la quadrivelocità della particella). Ciò è in linea con il Principiodi Equivalenza, il quale afferma che, localmente, è possibile scegliere un sistemadi coordinate tale da annullare gli effetti della gravità e in cui le leggi del motosiano quelle della relatività ristretta.
In ultima analisi definiamo il tensore di Riemann completamente covariantein base alla relazione
Rµνρσ ≡ gµλ Rλνρσ (1.5.11)
che gode della simmetriaR(µν)ρσ = 0 (1.5.12)
11

Capitolo 1. Richiami di Relatività Generale
come si verifica facilmente dalle relazioni (1.4.11) e (1.5.11). Invece dalle (1.4.12),(1.4.13) e (1.5.12) si trova che il tensore di Riemann è simmetrico rispetto allecoppie di indici µν e ρσ, cioè
Rµνρσ = Rρσµν (1.5.13)
Quest’ultima relazione implica che il tensore di Ricci sia simmetrico
Rµν = Rνµ. (1.5.14)
1.6 Simmetrie e derivata di Lie
Sia k un campo vettoriale sulla varietàM e φλ un gruppo di diffeomorfismiad un parametro generato da k. In particolare risulta che
dφλdλ
∣∣∣λ′= k(φλ′(p)
)φ0(p) = p
(1.6.1)
con p punto della varietà. Possiamo utilizzare φ∗λ per trascinare un campotensoriale Tµ1...µq
ν1...νrgenerico sulla varietà. Il confronto tra Tµ1...µq
ν1...νre
φ∗−λTµ1...µqν1...νr
, per piccoli valori del parametro λ, dà luogo alla derivata di Lie.Si definisce, infatti, derivata di Lie del campo Tµ1...µq
ν1...νrlungo k, la quantità
Lk Tµ1...µqν1...νr
∣∣∣p= lim
λ→0
1λφ∗−λ Tµ1...µq
ν1...νr
∣∣∣p− Tµ1...µq
ν1...νr
∣∣∣p (1.6.2)
Segue immediatamente dalla sua definizione che la derivata di Lie è una mappalineare fra tensori dello stesso tipo e che segue la regola di Leibnitz per ilprodotto (diretto) fra tensori. Inoltre, siccome k è il vettore tangente alla curvaintegrale di φλ, per una generica funzione abbiamo che
Lk f = k f = kµ∂µ f (1.6.3)
Per analizzare l’azione di Lk su un campo tensoriale arbitrario è utile intro-durre un sistema di coordinate suM in cui il parametro λ è scelto come unodelle coordinate. Prendiamo ad esempio λ = x0, così che k = ∂0
(= ∂
∂x0
). L’a-
zione di φ−λ allora corrisponde alla trasformazione di coordinate x0→ x0 + λ,mentre x1, x2, x3 rimangono fissate. Conseguentemente, la derivata di Lie di
12

Capitolo 1. Richiami di Relatività Generale
Tµ1...µqν1...νr
, in un sistema di coordinate adattate a k, è data da
LkTµ1...µqν1...νr
=∂Tµ1...µq
ν1...νr
∂x0 (1.6.4)
Per un campo vettoriale, quindi,
Lkξµ =∂ξµ
∂x0 (1.6.5)
Calcolando il commutatore fra k e ξ, in base coordinata, si trova che
[k,ξ]µ =
∂ξµ
∂x0 (1.6.6)
Quindi, [k,ξ]µ = Lkξµ (1.6.7)
in un sistema di coordinate adattate a k. Tuttavia, entrambe queste quantità sonodefinite indipendentemente dal sistema di coordinate, per cui concludiamo chela relazione (1.6.7) vale sempre.
A partire dalla (1.6.7) e dalle proprietà della derivata di Lie non è difficiledimostrare che per una 1-forma ων vale
Lkων = kµ ∂ων
∂xµ + ωµ∂kµ
∂xν(1.6.8)
Infine, per un tensore generico
LkTµ1···µqν1···νr =
∂Tµ1···µqν1···νr
∂xσkσ − Tλ µ2···µq
ν1···νr
∂kµ1
∂xλ− · · ·
− Tµ1···µq−1 λν1···νr
∂kµq
∂xλ+ Tµ1···µq
η···νr
∂kη
∂xν1
+ · · ·+ Tµ1···µqν1···η
∂kη
∂xνr.
(1.6.9)
Vediamo come la derivata di Lie possa essere utilizzata per trovare le sim-metrie di un sistema. Sia γ una curva di tipo tempo con estremi a e b. L’azioneper una particella di massa m che si muove su γ(λ) è
S = −m∫ b
adτ , (1.6.10)
13
Capitolo 1. Richiami di Relatività Generale
dove τ è il tempo proprio su γ. Grazie a (1.5.6) e a (1.5.7) riscriviamo l’azionecome
S = −m∫ λb
λadλ√−gµν xµ xν . (1.6.11)
L’equazione del moto della particella si ottiene imponendo che l’azione (1.6.11)abbia un valore estremale, cioè
δS = 0. (1.6.12)
Un semplice calcolo mostra che l’equazione del moto è proprio la (1.4.9), chepuò essere riscritta come
d2xµ
dλ2 + Γµνρ
dxν
dλ
dxρ
dλ= f
dxµ
dλ, (1.6.13)
con f in questo caso determinata da
f =dln| dτ
dλ |dλ
. (1.6.14)
Definiamo un’azione equivalente a (1.6.11)
S =12
∫ λb
λadλ[e−1(λ)gµν xµ xν −m2e(λ)
], (1.6.15)
dove e(λ) è una nuova funzione indipendente. Imponendo che δSδe = 0 si trova
chee =
1m
√−gµν xµ xν =
1m
dτ
dλ. (1.6.16)
Imponendo, invece, che δSδx = 0 si trova che l’equazione del moto è
Dxµ
dλ=(e−1e
)xµ , (1.6.17)
analoga alla (1.4.9). Una naturale scelta per il parametro λ è quella per cui laf nella (1.4.9) o, equivalentemente, il termine di destra dell’equazione (1.6.17)siano nulli. Una tale scelta implica che il parametro λ, che descrive la curva γ,sia proporzionale, a meno di una costante, al tempo proprio τ
λ ∝ τ + costante . (1.6.18)
Una tale parametrizzazione, per la curva γ, è chiamata parametrizzazione affine.
14

Capitolo 1. Richiami di Relatività Generale
Il vantaggio di considerare l’azione della particella nella forma (1.6.15) è chepossiamo prendere il limite m→ 0 per particelle di massa nulla. In questo casosi trova che ds2 = 0, mentre la (1.6.17) resta invariata.
Consideriamo ora la trasformazione
xµ→ xµ + αkµ(x),(e→ e
). (1.6.19)
Allora, al primo ordine in α,
S→ S +α
2
∫ λb
λadλe−1Lkgµν xµ xν , (1.6.20)
doveLkgµν = kηgµν,η + kη
,µgην + kη,νgηµ . (1.6.21)
L’azione risulta, quindi, invariante, al primo ordine in α, se Lkgµν = 0. Uncampo vettoriale k con queste proprietà è detto campo vettoriale di Killing o,semplicemente, vettore di Killing.
In particolare, k, è associato ad una simmetria dell’azione della particella e,quindi, ad una carica conservata. Non è difficile verificare che questa carica è
Q = k · p = kµ pµ , (1.6.22)
dove pµ è il quadrimpulso della particella
pµ = mdxµ
dτ(1.6.23)
Per ogni campo vettoriale k, è sempre possibile scegliere un sistema dicoordinate per cui
k =∂
∂ζ, (1.6.24)
dove ζ è una delle coordinate. In tali coordinate
Lkgµν =∂gµν
∂ζ. (1.6.25)
Dall’ultima relazione si vede che k è un vettore di Killing se la metrica èindipendente da ζ. Ad esempio, per la metrica di Schwarzschild (vedi più
avanti),∂gµν
∂t = 0. Per cui un possibile vettore di Killing è k = ∂∂t e la quantità
conservata associata è l’energia della particella.
15

Capitolo 2
Equazioni di campo di Einstein
Nel capitolo precedente abbiamo visto come sia la connessione che il tensoredi Riemann possano essere definiti in funzione della metrica dello spaziotempo.Inoltre, anche l’equazione del moto in relatività tiene conto della connessione equindi della metrica. Sembra quindi che la vera variabile dinamica da determi-nare sia la metrica stessa. Ci proponiamo, in questo capitolo, di determinarequali siano le equazioni che permettono di ricavarne la forma esplicita. Taliequazioni sono proprio le equazioni di campo di Einstein.
2.1 Il campo gravitazionale
Prima di procedere con il cercare equazioni che permettano di determinarela metrica dello spaziotempo, identifichiamo il campo gravitazionale. Partia-mo dall’equazione delle geodetiche (1.6.13) e scegliamo, come parametro chedescrive la curva, il cammino proprio s, definito in (1.5.5)
d2xµ
ds2 + Γµνρ
dxν
dsdxρ
ds= 0, (2.1.1)
che, come si è detto, descrive il moto dei corpi in relatività. Il campo gravitazio-nale non può che essere contenuto nelle Γ, che sono, a loro volta, le derivatedella metrica. Viene naturale quindi identificare il campo gravitazionale con lametrica gµν : questo costituisce uno degli aspetti peculiari della teoria.
Per rendere la cosa più quantitativa, cominciamo col dire che, in genere, gµν
differisce di poco dalla metrica nello spazio di Minkowski. Poniamo quindi
gµν = ηµν + hµν , con |hµν | 1. (2.1.2)
16

Capitolo 2. Equazioni di campo di Einstein
Il campo gravitazionale, in genere, è un campo quasi statico; si ha quindi
∂hµν
∂x0 ' 0. (2.1.3)
Nel caso di basse velocità, rispetto a quella della luce nel vuoto, le componentidxi
ds (i = 1, 2, 3) risultano trascurabili rispetto a dx0
ds . Fatte queste ipotesi la (2.1.1)diventa
d2xi
ds2 = −Γi00 . (2.1.4)
Sotto le ipotesi fatte, il simbolo di Christoffel può essere scritto come
Γi00 ' −
12
∂h00∂xi
. (2.1.5)
Combinando la (2.1.4) e (2.1.5) si ha che
d2xi
ds2 =12
∂h00∂xi
. (2.1.6)
D’altra parte, in virtù del Principio di Corrispondenza, sappiamo che l’equazio-ne del moto è ben approssimata da quella di Newton
d2xi
dt2 = −∂Φ∂xi
. (2.1.7)
Nel limite non relativistico, inoltre, possiamo porre ds ' −dt e, confrontando la(2.1.6) e la (2.1.7), si trova
h00 = −2Φ , (2.1.8)
e quindig00 ' −1− 2Φ . (2.1.9)
Sostituendo l’espressione del potenziale Newtoniano generato da una distribu-zione di massa M con simmetria sferica, Φ = −M
r , si ha che
g00 = −1 +2M
r, (2.1.10)
Nel SI si avrebbe: g00 = −1 + 2GMc2r , dove G è la costante di gravitazione universale.
17

Capitolo 2. Equazioni di campo di Einstein
2.2 Tensore energia impulso
Dobbiamo, a questo punto tenere a mente un importante fatto: il campogravitazionale non è generato solo da materia, ma anche da qualunque distribu-zione di energia e impulso. Ad esempio il campo elettromagnetico trasportaenergia e impulso e, quindi, incurva lo spaziotempo: esso stesso è sorgente digravità. È necessario tenere conto di questo fatto nelle equazioni di campo cheandremo a ricavare. A questo scopo introduciamo il tensore energia impulso Tµν .
Consideriamo un sistema fisico il cui integrale d’azione ha la forma1
Sm =∫
d4x√−g Λ , (2.2.1)
dove Λ è la densità di lagrangiana del sistema. Il principio variazionale di Ha-milton stabilisce che il “moto” di un sistema fisico, fra due istanti dello spaziodelle configurazioni, è tale che l’azione sia stazionaria in corrispondenza della“traiettoria del moto” per piccole perturbazioni dello stesso. Tuttavia noi nonsiamo interessati alle “equazioni del moto” del sistema fisico. È sufficientequindi scrivere soltanto i termini legati alle variazioni delle gµν . Riportiamosolamente il risultato finale tralasciando i calcoli2:
δSm = −12
∫d4x√−g Tµνδgµν , (2.2.2)
dove Tµν è il tensore energia impulso dato da
Tµν = − 2√−g
[∂(√−g Λ
)∂gµν − ∂λ
∂(√−g Λ
)∂gµν
,λ
]. (2.2.3)
Risulta chiaro, dunque, che il tensore energia impulso è simmetrico. Il tensoreenergia impulso gode di un’altra importante proprietà, e cioè che
Tµν;ν = 0. (2.2.4)
In presenza di un campo elettromagnetico si ha che Λ è data da
Λ = − 116π
Fµν Fρσ gµρ gνσ , (2.2.5)
1Con d4x√−g indichiamo l’elemento di volume invariante.
2Una derivazione dei risultati che seguono può essere trovata in Landau & Lifschitz, Teoriadei campi, Editori Riuniti university press.
18

Capitolo 2. Equazioni di campo di Einstein
dove Fµν è il tensore del campo elettromagnetico. L’espressione (2.2.3) deltensore energia impulso ci permette di calcolare il tensore energia impulso delcampo elettromagnetico. Dopo semplici passaggi si trova
Tµν =1
4π
(Fµρ Fν
ρ − 14
Fρσ Fρσ gµν
). (2.2.6)
2.3 Equazioni di Einstein
Prima di passare alla deduzione delle equazioni del campo gravitazionaledefiniamo l’azione del campo gravitazionale. Questa, detta anche azione diHilbert-Einstein, è data dalla formula
Sg =1
16π
∫d4x√−g R , (2.3.1)
dove R è la curvatura scalare di Ricci, ottenuta contraendo la metrica con il tensoredi Ricci (1.4.15)
R ≡ gµν Rµν . (2.3.2)
Possiamo passare ora alla deduzione delle equazioni del campo gravitazionale.Queste equazioni si ricavano dal principio di minima azione δ
(Sg + Sm
)= 0.
Facendo variare Sg rispetto alle gµν si trova, dopo alcuni passaggi, che
δSg =1
16π
∫d4x√−g(
Rµν −12
gµν R)
δgµν , (2.3.3)
mentre la variazione di Sm è data dalla (2.2.2). Dal principio di minima azionesi ha quindi
116π
∫d4x√−g(
Rµν −12
gµν R− 8πTµν
)δgµν = 0 (2.3.4)
e quindi, tenendo conto che le δgµν sono arbitrarie,
Rµν −12
gµν R = 8πTµν . (2.3.5)
Queste sono le equazioni del campo gravitazionale, equazioni fondamentalidella teoria della relatività generale. Sono anche dette equazioni di campo di
19

Capitolo 2. Equazioni di campo di Einstein
Einstein. Il tensore Gµν definito da
Gµν = Rµν −12
gµν R (2.3.6)
è detto tensore di Einstein.
Contraendo le equazioni (2.3.5) con la metrica si trova
R = −8πT , (2.3.7)
dove T = gµν Tµν è la traccia del tensore T. Ne esce che le equazioni di campopossono essere scritte anche nella forma
Rµν = 8π(
Tµν −12
gµν T)
. (2.3.8)
Le equazioni di Einstein non sono lineari e quindi il principio di sovrapposizionenon vale per i campi gravitazionali. In generale le equazioni possono esserelinearizzate solo per campi deboli (vedi all’inizio di questo capitolo).
Nel vuoto si ha che Tµν = 0, per cui le equazioni si riducono a
Rµν = 0. (2.3.9)
Ciò non significa che lo spaziotempo sia piatto. Per affermare una cosa delgenere abbiamo bisogno di una condizione più forte e cioè che Rµνρσ = 0.
La proprietà cruciale che caratterizza il tensore di Einstein è l’identità
Gµν;ν = 0. (2.3.10)
Essa segue direttamente dall’identità di Bianchi (1.4.14). Di conseguenza, inbase alle equazioni di campo (2.3.5), anche il tensore energia impulso devesoddisfare un’identità simile. Si ritrova così l’equazione (2.2.4). L’equazione(2.2.4) esprime la conservazione dell’energia e dell’impulso e contiene in sé leequazioni del moto del sistema fisico. Quindi le equazioni del campo gravita-zionale contengono implicitamente le equazioni della materia stessa che generaquesto campo. Da ciò risulta che la distribuzione e il moto della materia stessache genera il campo devono essere determinati contemporaneamente al campomedesimo.
20
Capitolo 3
Buco Nero di Schwarzschild
In questo capitolo deriveremo una delle soluzioni esatte delle equazioni diEinstein: la soluzione di Schwarzschild. La soluzione di Schwarzschild nel vuotodescrive lo spaziotempo attorno ad una massa sferica, non rotante, e privadi carica elettrica. Storicamente è la prima ad essere stata trovata. Con essaè stato possibile calcolare l’angolo di precessione dell’orbita di Mercurio e ladeflessione della luce in prossimità del Sole: questi furono i fatti che diederoforte sostegno alla teoria di Einstein. Inoltre, come vedremo approfonditamentein seguito, essa è in grado di prevedere l’esistenza dei buchi neri.
3.1 Soluzione di Schwarzschild
Consideriamo un campo gravitazionale a simmetria sferica. Un campo delgenere può essere generato da qualsiasi distribuzione a simmetria centrale dellamassa; in particolare è necessario che non solo la distribuzione della materia siaa simmetria a centrale, ma anche il moto della materia: la velocità in ogni puntodeve essere radiale. Se scegliamo un sistema di coordinate “sferiche” (r,θ,φ) laforma più generale dell’intervallo è
ds2 = h(r, t)dr2 + k(r, t)(
sin2 θdφ2 + dθ2)+ l(r, t)dt2 + a(r, t)dr dt , (3.1.1)
dove a, h, k, l sono funzioni del “raggio vettore” r e del “tempo” t.Eseguiamo a questo punto una trasformazione di coordinate che non alteri
la simmetria sferica di ds2, trasformiamo cioè le coordinate r e t attraverso leformule
r = f1(r′, t′), t = f2(r′, t′) (3.1.2)
21

Capitolo 3. Buco Nero di Schwarzschild
( f1 e f2 sono funzioni delle nuove coordinate r′ e t′), in modo che a(r, t) siannulli e che k(r, t) sia uguale a r2. Una tale scelta per la coordinata r implicache la lunghezza di una circonferenza centrata nell’origine delle coordinate sia2πr. Riscriviamo le grandezze h e l in forma esponenziale, rispettivamente comeeλ e −eν, dove λ e ν sono funzioni di r e t. Si ottiene quindi per ds2 l’espressione
ds2 = −eνdt2 + eλdr2 + r2(dθ2 + sin2 θ dφ2) . (3.1.3)
Se, quindi, le coordinate xµ sono rappresentate dalle coordinate (t,r,θ,φ) lecomponenti non nulle della metrica sono
gtt = −eν , grr = eλ , gθθ = r2 , gφφ = r2 sin2 θ . (3.1.4)
Inoltre le componenti della metrica inversa sono
gtt = −e−ν , grr = e−λ , gθθ = r−2 , gφφ = r−2 sin−2 θ . (3.1.5)
Con l’aiuto della formula (1.5.9) possiamo calcolarci le Γ. Si ottiene (l’apiceindica la derivazione rispetto ad r e il punto la derivazione rispetto a t).
Γrrr =
λ′2 , Γt
rt =ν′2 , Γθ
φφ = −sinθcosθ ,
Γtrr =
λ2 eλ−ν , Γr
θθ = −re−λ , Γrtt =
ν′2 eν−λ ,
Γrrt =
λ2 , Γr
φφ = −r sin2 θe−λ .
(3.1.6)
Tutte le altre componenti delle Γ (tranne quelle che si ottengono dalla simmetriadella connessione, ovvero permutando gli indici bassi) sono nulle.
Per scrivere (e risolvere) le equazioni di Einstein dovremmo ora calcolare lecomponenti del tensore di Ricci. Grazie alle formule (1.4.15) e (1.4.11) otteniamo,per le componenti miste e dopo un po’ di calcoli
8πTrr = −e−λ
(ν′
r+
1r2
)+
1r2 , (3.1.7)
8πTθθ = 8πTφ
φ = −12
e−λ
(ν′′ +
ν′2
2+
ν′ − λ′
r− ν′λ′
2
)+
12
e−ν
(λ +
λ2
2− λν
2
),
(3.1.8)
22

Capitolo 3. Buco Nero di Schwarzschild
8πTtt = −e−λ
(1r2 −
λ′
r
)+
1r2 , (3.1.9)
8πTrt = −e−λ λ
r. (3.1.10)
(le altre equazioni nelle equazioni di Einstein si annullano identicamente).Cerchiamo ora la soluzione per il campo al di fuori delle masse che lo generano,poniamo cioè il tensore energia impulso uguale a zero. Si ottengono quindi leequazioni
− e−λ
(ν′
r+
1r2
)+
1r2 = 0, (3.1.11)
− e−λ
(1r2 −
λ′
r
)+
1r2 = 0, (3.1.12)
λ = 0. (3.1.13)
Omettiamo l’equazione (3.1.8) perché non è indipendente dalle altre tre.Dalla (3.1.13) si vede che λ non dipende dal tempo. Sommando (3.1.11) e
(3.1.12), troviamo λ′ + ν′ = 0, cioè
λ + ν = f (t) , (3.1.14)
dove f (t) è una funzione solo di t. Senza perdita di generalità si può porref (t) = 0: ciò non altera la forma dell’intervallo (3.1.3). Da ciò si vede che uncampo gravitazionale a simmetria centrale nel vuoto è automaticamente statico.
L’equazione (3.1.12) si integra facilmente e dà
e−λ = eν = 1 +costante
r. (3.1.15)
All’infinito (r→ ∞) si ha e−λ = eν = 1, cioè la metrica diventa minkowskianalontano dal corpo che genera il campo. La costante si esprime facilmente infunzione della massa che genera il campo sfruttando il limite di campo debole(2.1.10). In particolare si trova che costante = 2M e l’intervallo assume la forma
ds2 = −(
1− 2Mr
)dt2 +
(1− 2M
r
)−1
dr2 + r2(sin2 θdφ2 + dθ2) , (3.1.16)
r = 2M è detto raggio di Schwarzschild ed è caratteristico di ogni corpo.Questa è la soluzione trovata da Karl Schwarzschild nel 1916, pochi mesi
dopo la pubblicazione della teoria della relatività generale.
23

Capitolo 3. Buco Nero di Schwarzschild
3.2 Collasso gravitazionale di un corpo sferico
Nella metrica di Schwarzschild (3.1.16), gtt si annulla e grr diverge per r =2M (raggio si Schwarzschild). Potremmo essere portati a pensare che la metricaha una singolarità per r = 2M e che quindi non possano esistere corpi conraggio inferiore al proprio raggio di Schwarzschild. Tuttavia queste conclusionesarebbero errate.
Per precisare il carattere della metrica spaziotemporale vicino a r = 2M,studiamo il problema del collasso di un corpo sferico (una stella ad esempio)e vediamo cosa succede per r→ 2M. Per fare ciò ci riconduciamo al problemadi una particella di “prova” che cade liberamente (trascurando le forze dipressione) nel campo della massa M. La metrica al di fuori della stella è lametrica di Schwarzschild (3.1.16) e, per continuità, anche sulla superficie. Ser = r(t) sulla superficie abbiamo
ds2 = −[(
1− 2Mr
)−(
1− 2Mr
)−1
r2]
dt2 + r2dΩ2 , (3.2.1)
dove r = drdt e dΩ2 = sin2 θdφ2 + dθ2 (metrica 2-sfera di raggio unitario). Per un
moto puramente radiale dΩ2 = 0; inoltre ds2 = −dτ2. Si ha quindi
1 =
[(1− 2M
r
)−(
1− 2Mr
)−1
r2](
dtdτ
)2
. (3.2.2)
Notiamo ora che ∂∂t è un vettore di Killing per la metrica di Schwarzschild e la
carica conservata corrispondente è l’energia della particella (vedi (1.6.22)) datada
ε = −gttdtdτ
(energia per unità di massa) (3.2.3)
per cui possiamo riscrivere la (3.2.2) come
1 =
[(1− 2M
r
)−(
1− 2Mr
)−1
r2](
1− 2Mr
)−2
ε2 (3.2.4)
o
r2 =1ε2
(1− 2M
r
)2(2Mr− 1 + ε2
). (3.2.5)
Immaginiamo che il collasso avvenga con velocità radiale iniziale nulla; quindir = 0 per r = rmax. Allora r decresce avvicinandosi a r = 2M asintoticamente pert→∞. Infatti integrando la (3.2.5) si ottiene che il tempo del collasso (per un
24
Capitolo 3. Buco Nero di Schwarzschild
osservatore lontano) è dato da
t =∫ rmax
r
εdr(1− 2M
r
)√2M
r − 1 + ε2. (3.2.6)
(rmax =
2M1−ε2
). Questo integrale diverge per r→ 2M come −2M ln(r− 2M) e
quindi la legge asintotica con cui r tende a 2M è
r− 2M = costante e−t
2M . (3.2.7)
Si vede così che lo stadio finale di avvicinamento di un corpo in collasso alraggio di Schwarzschild avviene secondo una legge esponenziale con un tempocaratteristico molto piccolo ∼ 2M (nel SI 2GM
c3 ).D’altra parte dal punto di vista di un osservatore sulla superficie della stella,
l’avvicinamento avviene in un intervallo di tempo (proprio) finito. Infatti
ddt
=
(dtdτ
)−1 ddτ
=1ε2
(1− 2M
r
)d
dτ. (3.2.8)
Possiamo riscrivere, quindi, la (3.2.5) come(drdτ
)2
=
(2M
r− 1 + ε2
). (3.2.9)
Una semplice quadratura permette di vedere che il tempo proprio del collassoè dato da
τ =∫ rmax
r
dr√2M
r −2Mrmax
. (3.2.10)
Questo integrale converge per r→ 2M. Raggiunto in tempo proprio il raggio diSchwarzschild il corpo corpo continuerà a comprimersi e tutte le sue particelleraggiungeranno il centro in un intervallo di tempo (proprio) finito. Infatti,integrando la (3.2.10) per r→ 0, si ottiene che l’intervallo di caduta è dato da
τ =πM
(1− ε)32
. (3.2.11)
Non accade, quindi, nulla di speciale in r = 2M. Ciò suggerisce di studiarela natura dello spaziotempo vicino ad r = 2M in un sistema di coordinate in“caduta” con il corpo. È, inoltre, conveniente scegliere particelle senza massa.
25

Capitolo 3. Buco Nero di Schwarzschild
Per geodetiche radiali nulle nello spaziotempo di Schwarzschild si ha che
dt2 =dr2(
1− 2Mr
)2 ≡ (dr∗)2 , (3.2.12)
dove
r∗ = r + 2M ln(
r− 2M2M
), per r > 2M (3.2.13)
è la coordinata radiale di Regge-Wheeler. Per r che varia tra 2M e ∞ si ha che r∗
varia da −∞ e ∞. Dalla (3.2.12) si ha che
d(t± r∗) = 0, (3.2.14)
per geodetiche radiali nulle. Si può introdurre quindi la coordinata entrante nulladi Eddington-Finkelstein definita da
v = t + r∗ , −∞ < v < ∞ . (3.2.15)
Possiamo riscrivere, a questo punto, la metrica nelle coordinate entranti diEddington-Finkelstein (v,r,θ,φ)
ds2 =
(1− 2M
r
)(− dt2 + dr∗2
)+ r2dΩ2
= −(
1− 2Mr
)dv2 + 2drdv + r2dΩ2 . (3.2.16)
Si noti che v è inizialmente definita solo per r > 2M, ma può essere continuataanaliticamente per tutti i valori di r. Inoltre, a causa del termine misto, è imme-diato verificare come la metrica sia regolare per r = 2M, per cui la singolaritàdi Schwarzschild è effettivamente di tipo coordinato.
Oltre a dimostrare la non singolarità fisica del raggio di Schwarszchild, lametrica di Eddington-Finkelstein è molto adatta per capire come mai nientepossa allontanarsi dal campo gravitazionale della sorgente una volta passata lasfera si Schwarzschild. È possibile, infatti, riscrivere la metrica in questo modo
2drdv = −[− ds2 +
(2M
r− 1)
dv2 + r2dΩ2]
. (3.2.17)
In particolare si vede che 2drdv ≤ 0 quando ds2 ≤ 0, cioè per particelle che si
26

Capitolo 3. Buco Nero di Schwarzschild
muovono su geodetiche di tipo tempo o luce, e per r ≤ 2M, cioè dentro allasfera si Schwarzschild. Inoltre, il segno di dv non può essere arbitrario, poichése consideriamo il moto dal passato verso il futuro si ha dv > 0, dato che v erastata definita come v = t + r∗, per cui se il tempo t aumenta anche il “tempo” vdeve aumentare. Da quanto detto si evince che deve essere necessariamente
dr ≤ 0 per r ≤ 2M . (3.2.18)
Il segno d’uguaglianza vale solamente quando r = 2M, dΩ = 0 e ds2 = 0 (geo-detiche radiali entranti nulle). Quindi niente può allontanarsi dal campo gravi-tazionale della sorgente una volta oltrepassata la sfera si Schwarzschild. Unatale superficie è detta orizzonte degli eventi.
3.3 Buchi neri e buchi bianchi
Abbiamo visto come nessun segnale possa scappare dalla superficie di unastella una volta che questa abbia passato (durante il collasso) la regione r = 2M.La stella è collassata in un buco nero. Abbiamo anche visto che per un osservatoreesterno, la superficie delle stella non raggiunge mai effettivamente la sfera diSchwarzschild, ma per r→ 2M il redshift della luce che lascia la superficiecresce esponenzialmente e la stella scompare dalla vista in un tempo ∼ MG
c3 .L’ipersuperficie r = 2M agisce come una membrana unidirezionale: tutto
può entrare, ma niente può uscire. Vediamo ora che succede se al posto di vintroduciamo la coordinata uscente nulla di Eddington-Finkelstein u, definita come
u = t− r∗ , −∞ < u < ∞ (3.3.1)
anch’essa definita inizialmente fuori dalla sfera di Schwarzschild, ma prolun-gabile analiticamente all’interno. Possiamo, quindi, riscrivere la metrica nellecoordinate di Eddington-Finkelstein uscenti (u,r,θ,φ)
ds2 = −(
1− 2Mr
)du2 − 2drdu + r2dΩ2 . (3.3.2)
È importante sottolineare che la regione r < 2M nelle coordinate di Eddington-Finkelstein uscenti non è la stessa delle coordinate di Eddington-Finkelsteinentranti. Infatti nella regione all’interno della sfera di Schwarzschild la metricadescrive un comportamento esattamente opposto a quello visto prima. Per
27

Capitolo 3. Buco Nero di Schwarzschild
vedere ciò riscriviamo la metrica (3.3.2) nel seguente modo
2drdu = −ds2 +
(2M
r− 1)
du2 + r2dΩ2 . (3.3.3)
Nella regione r ≤ 2M risulta
drdu ≥ 0, per ds2 ≤ 0. (3.3.4)
Dato che deve essere du ≥ 0 per linee d’universo dirette verso il “futuro”, deveanche essere dr ≥ 0. Il segno d’uguaglianza vale solo nel caso in cui r = 2M,dΩ = 0 e ds2 = 0. In questo caso una stella con una superficie di raggio r < 2Mdeve per forza espandersi attraverso la regione r = 2M. A questa soluzionesoluzione viene dato il nome di buco bianco, l’inverso temporale del buco nero.Entrambe le soluzioni di buco nero e buco bianco sono previste dalla relativitàgenerale essendo le equazioni di Einstein invarianti rispetto alla riflessionetemporale. Tuttavia i buchi bianchi richiedono condizioni iniziali estremamenteimprobabili, per questo si è portati a pensare che solo la soluzione di buco nerosia realizzabile.
3.4 Coordinate di Kruskal-Szekeres
La regione r > 2M è coperta sia dalle coordinate entranti che uscenti diEddington-Finkelstein. Possiamo quindi riscrivere la metrica di Schwarzschildin termini delle coordinate (u,v,θ,φ)
ds2 = −(
1− 2Mr
)dudv + r2dΩ2 . (3.4.1)
Introduciamo ora nuove coordinate (U,V) definite (per r > 2M) da
U = −e−u
4M , V = ev
4M (3.4.2)
in termini delle quali la metrica diventa
ds2 = −32M3
re−
r2M dUdV + r2dΩ2 , (3.4.3)
28

Capitolo 3. Buco Nero di Schwarzschild
dove r(U,V) è data implicitamente da UV = er∗2M o anche
UV = −(
r− 2M2M
)e
r2M . (3.4.4)
La metrica (3.4.3) è quindi la metrica di Schwarzschild riscritta nelle coordinateKruskal-Szekeres (U,V,θ,φ). Inizialmente la metrica è definita per U < 0 e V > 0,ma può essere estesa analiticamente in modo che risulti U > 0 e V < 0. Dalla(3.4.4) si vede che r = 2M corrisponde a UV = 0, cioè lungo gli assi U e V. Lasingolarità in r = 0 (che è una vera singolarità dello spaziotempo) si ha quandoUV = 1, per cui essa non sarà un punto, ma due archi di iperbole.
È conveniente disegnare le linee con U e V costanti (geodetiche radiali nulleentranti o uscenti) a 45 gradi, in modo che il diagramma spaziotempo sia
Ci sono in tutto quattro regioni nello spaziotempo di Kruskal, dipendentidal segno di U e V. Le regioni I e II sono anche ricoperte dalle coordinate diEddington-Finkelstein entranti. Queste sono le uniche regioni rilevanti per ilcollasso gravitazionale; infatti le regioni III e IV corrispondono alle soluzioni dibuco bianco.
29
Capitolo 3. Buco Nero di Schwarzschild
3.5 Singolarità e completezza geodetica
Una singolarità della metrica è un punto in cui il determinante o il suoinverso si annullano. D’altra parte una singolarità può essere dovuta ad unacattiva scelta del sistema di coordinate: abbiamo visto, infatti, che la singo-larità nell’orizzonte degli eventi nella metrica di Schwarzschild è proprio diquesto tipo. Questo tipo di singolarità è quindi rimovibili, come dimostratoad esempio introducendo le coordinate di Eddington-Finkelstein o quelle diKruskal-Szekeres.
In generale se non esiste un sistema di coordinate per cui la singolarità siarimovibile allora questa costituisce una vera singolarità dello spaziotempo. Ognisingolarità per cui qualche scalare di curvatura, costruito a partire dal tensoremetrico, diverge è una singolarità dello spaziotempo. Una tale singolarità èchiamata anche singolarità di curvatura. La singolarità in r = 0 nello spaziotempodi Schwarzschild ne è un esempio. Tuttavia non tutte le singolarità irrimovibilisono singolarità di curvatura.
Potremmo pensare, quindi, di “tagliare” la regione di spaziotempo conte-nente la singolarità non rimovibile e non doverci più preoccupare di questa.Tuttavia rimarrebbe il problema equivalente di capire cosa fare con delle curveche raggiungono la frontiera della regione tagliata. Notiamo dapprima cheil problema non sussiste se la regione si trova ad infinito, cioè ad un valoreinfinito del parametro affine della curva che raggiunge una tale regione. D’altraparte l’impossibilità di continuare tutte le curve per tutti i valori del relativoparametro affine può essere presa come il carattere che definisce uno spaziotemposingolare. Parleremo, infatti, di un spaziotempo singolare come di uno spaziogeodeticamente incompleto.
Possiamo quindi dare la seguente
Definizione 3.5.1. Uno spaziotempo è non singolare se e solo se tutte le geodetichepossono essere estese per tutti i valori del proprio parametro affine, cambiando coordinatese necessario.
Nel caso della soluzione di Schwarzschild nel vuoto, una particella che simuove su una geodetica radiale entrante raggiungerà la singolarità coordinatar = 2M per un valore finito del parametro affine, ma, come abbiamo visto, questageodetica può essere continuata nella regione II con un opportuno cambio dicoordinate. La sua continuazione incontra, quindi, la singolarità di curvaturain r = 0. Tagliare una qualsiasi regione contenente r = 0, pertanto, conduce aun’incompletezza della geodetica.
30

Capitolo 3. Buco Nero di Schwarzschild
3.6 Massima estensione analitica
Ogni volta che incontriamo una singolarità, per un valore finito del parame-tro affine lungo una qualche geodetica, dovremmo cercare di capire se questa èrimovibile o meno. In caso affermativo, e con un opportuno cambio di coordi-nate, possiamo costruire la massima estensione analitica di un dato spaziotempoin cui ogni geodetica che non termina su una singolarità irremovibile può essere estesaad ogni valore del suo parametro affine. Lo spaziotempo di Kruskal rappresenta,quindi, la massima estensione analitica dello spaziotempo di Schwarzschild:non è infatti possibile trovare altre regioni per continuazione analitica.
3.7 Ipersuperfici nulle
Sia S(x) una funzione liscia delle coordinate xµ dello spaziotempo. Conside-riamo una famiglia di ipersuperfici S = costante. I campi vettoriali normali alleipersuperfici sono dati dalla formula
l = f (x)(
gµν∂νS)∂µ , (3.7.1)
dove f è un’arbitraria funzione non nulla. Se l2 = 0 per una particolare ipersu-perficie, N , allora N è detta essere una ipersuperficie nulla.
Esempio. Facciamo un esempio di ipersuperficie nulla nello spaziotempo diSchwarzschild in coordinate di Eddington-Finkelstein (v,r,θ,φ). Consideriamo,a tal proposito, la famiglia di ipersuperfici S = r− 2M. Il vettore normale è datoda
l = f (r)[(
1− 2Mr
)∂S∂r
∂
∂r+
∂S∂r
∂
∂v+
∂S∂v
∂
∂r
]= f (r)
[(1− 2M
r
)∂
∂r+
∂
∂v
], (3.7.2)
mentre
l2 = f 2 gµν∂µS∂νS
= f 2 grr =
(1− 2M
r
)f 2 . (3.7.3)
Dall’ultima relazione si vede, in particolare, che r = 2M è un’ipersuperficie
31

Capitolo 3. Buco Nero di Schwarzschild
nulla e che
l∣∣∣r=2M
= f∂
∂v. (3.7.4)
Consideriamo ora alcune proprietà delle ipersuperfici nulle. Sia N un’iper-superficie nulla con vettore normale l. Un vettore t, tangente a N , è un vettoreper cui t · l = 0; ma, siccome N è nulla, l · l = 0 e quindi l è esso stesso tangentead N . Con ciò
lµ =dxµ
dλ(3.7.5)
per qualche curva di tipo nullo su N .
Proposizione 3.7.1. Le curve xµ(λ) sono geodetiche.
Dimostrazione. Consideriamo
lν∇νlµ =(
lρ∂ρ f)
gµν∂νS + f gµν lρ∇ρ∂νS
=
(d ln f
dλ
)lµ + f lρ∇µ
(f−1lρ
)=
(d ln f
dλ
)lµ +
12
gµν∂νl2 −(
gµν∂ν ln f)
l2 . (3.7.6)
Nonostante l2∣∣∣N= 0 non necessariamente deve essere che ∂µl2
∣∣∣N= 0, a meno
che l’intera famiglia S = costante non sia nulla. Dobbiamo però considerare che,siccome l2 è costante su N , allora tµ∂µl2 = 0 per ogni vettore t tangente ad N .In questo modo
∂µl2∣∣∣N
∝ lµ (3.7.7)
e, pertanto,
lν∇νlµ∣∣∣N
∝ lµ , (3.7.8)
cioè xµ(λ) è una geodetica con vettore tangente l. La funzione f può esserescelta in modo che lν∇νlµ = 0, ovvero in modo che λ sia un parametro affine
Definizione 3.7.1. le geodetiche nulle xµ(λ) con parametro affine λ, per cui ivettori tangenti dxµ
dλ sono normali all’ipersuperficie N , sono le generatrici di N .
Esempio. U = 0 è un’ipersuperficie nulla nello spaziotempo di Kruskal. I
32

Capitolo 3. Buco Nero di Schwarzschild
vettori normali alle ipersuperfici U = costante sono
l = − f r32M3 e
r2M
∂
∂V(3.7.9)
l∣∣∣N= − f e
16M2∂
∂V, siccome r = 2M su N (3.7.10)
È facile vedere che l2 ≡ 0, per cui sia l2 che ∂µl2 si annullano su N ; ciò èdovuto al fatto che le ipersuperfici U = costante sono nulle per ogni valoredella costante, non solo zero. In particolare si ha che lν∇µlµ = 0 se f è costante.Scegliamo, quindi, f = −16M2e−1. Si ha allora che
l =∂
∂V(3.7.11)
è normale ad U = 0 e V è un parametro affine per le generatrici di questa ipersuperficienulla.
3.8 Orizzonti di Killing
Definizione 3.8.1. Un’ipersuperficie nulla N è un orizzonte di Killing del campovettoriale di Killing ξ se, su N , ξ è normale a N .
Sia l il vettore normale ad N definito in modo che lν∇νlµ = 0 (parametriz-zazione affine). Allora, siccome su N
ξ = f l (3.8.1)
per una qualche funzione f , è facile verificare che
ξν∇νξµ = κξµ , (3.8.2)
dove κ = ξµ∂µ ln | f | è chiamata gravità superficiale. Un’altra relazione utile per ilcalcolo di κ su N è
κ2 = −12(∇µξν
)(∇µξν
). (3.8.3)
Per un campo vettoriale di Killing ξ non è difficile verificare la seguenterelazione
∇ρ∇µξν = Rνµρσξσ . (3.8.4)
33
Capitolo 3. Buco Nero di Schwarzschild
Sfruttando, infine, questa relazione possiamo dimostrare la seguente
Proposizione 3.8.1. κ è costante sulle orbite di ξ.
Dimostrazione. Sia t un vettore tangente a N . Allora dalla (3.8.3) si ha che
tν∂νκ2 = −(∇µξν
)tρ∇ρ∇µξν
= −(∇µξν
)tρRνµρ
σξσ (3.8.5)
Ora, dato che il vettore di Killing ξ oltre ad essere normale ad N è anchetangente, possiamo scegliere il vettore t = ξ. Così facendo si trova che
ξν∂νκ2 = −(∇µξν
)Rνµρσξρξσ = 0 (3.8.6)
L’ultima uguaglianza nella (3.8.6) segue dalle proprietà di simmetria del tensoredi Riemann.
Si trova così che κ è costante su orbite di ξ.
Gravità superficiale sulla sfera di Schwarzschild
Abbiamo visto come la metrica di Schwarzschild possa essere espressa nellecoordinate di Eddington-Finkelstein entranti. In particolare, questa è data da
ds2 = −(
1− 2Mr
)dv2 + 2drdv + r2dΩ2 (3.8.7)
e ammette vettore di Killing k = ∂∂v . Come abbiamo già visto, k, risulta essere
normale all’ipersuperficie nulla r = 2M; questo fa si che la sfera di Schwarzschildsia effettivamente un orizzonte di Killing. Un calcolo diretto inoltre ci permettedi trovare la gravità superficiale sull’orizzonte
kν∇νkµ =1
4Mkµ . (3.8.8)
Risulta, quindi, che la gravità superficiale per Schwarzschild è κ = 14M ( c4
4GM nelSI).
34

Capitolo 3. Buco Nero di Schwarzschild
Normalizzazione della gravità superficiale
Se N è un orizzonte di Killing di ξ con gravità superficiale κ, allora, questo,è anche orizzonte di Killing di cξ con gravità superficiale c2κ per ogni costantec. Quindi la gravità superficiale non è una proprietà solo di N , ma dipendeanche dalla normalizzazione di ξ.
Non esiste una naturale normalizzazione di ξ su N , dato che ξ2 = 0 su N .Tuttavia in uno spaziotempo asintoticamente piatto esiste una naturale norma-lizzazione ad infinito. Ad esempio per il campo vettoriale di Killing generatoredelle traslazioni temporali, k, possiamo scegliere una normalizzazione di questoin modo che
k2→−1, per r→∞ . (3.8.9)
Questa condizione, quindi, fissa k e di conseguenza κ, a meno di un segno. Ilsegno può essere scelto in modo che k sia “diretto verso il futuro”.
3.9 Spaziotempo di Rindler
Ritorniamo alla soluzione di Schwarzschild (3.1.16)
ds2 = −(
1− 2Mr
)dt2 +
(1− 2M
r
)−1
dr2 + r2(sin2 θdφ2 + dθ2) . (3.9.1)
Poniamo
r− 2M =x2
4M. (3.9.2)
Da ciò abbiamo che
1− 2Mr
=(κx)2
1 + (κx)2 . (3.9.3)
dove κ = 14M . Osserviamo, inoltre, che per x ' 0
1− 2Mr' (κx)2 (3.9.4)
e, quindi,dr2 = (κx)2dx2 . (3.9.5)
Quindi, per r ' 2M, si trova facilmente che
ds2 ' −(κx)2dt2 + dx2 +1
4MdΩ2 . (3.9.6)
35

Capitolo 3. Buco Nero di Schwarzschild
La somma dei primi due termini del membro di destra della (3.9.6) può essereconsiderata come la metrica di uno spazio bidimensionale, che chiameremospaziotempo di Rindler bidimensionale, mentre invece l’ultimo termine corrispondealla metrica di una 2-sfera di raggio 1
2κ . Possiamo quindi andare a studiarelo spaziotempo vicino l’orizzonte di Killing in r = 2M studiando la metricabidimensionale dello spaziotempo di Rindler
ds2 = −(κx)2dt2 + dx2 , (3.9.7)
definita inizialmente in x > 0. Questa metrica è singolare per x = 0, ma que-sta, ovviamente, è semplicemente una singolarità coordinata. Per vederlointroduciamo un sistema di coordinate del tipo di Kruskal visto sopra.
U′ = −xe−κt , V′ = xeκt (3.9.8)
in termini delle quali la metrica di Rindler diventa
ds2 = −dU′dV′ . (3.9.9)
Poniamo oraU′ = T − X , V′ = T + X . (3.9.10)
Si trova, infine,ds2 = −dT2 + dX2 . (3.9.11)
Si trova quindi che lo spaziotempo di Rindler non è altro che lo spaziotempodi Minkowski bidimensionale in coordinate inusuali. Inoltre le coordinate diRindler con x > 0 coprono solo la regione U′ < 0 e V′ > 0 dello spazio diMinkowski.
36

Capitolo 3. Buco Nero di Schwarzschild
Non è difficile vedere dalla (3.9.9) che le linee U′ = 0 e V′ = 0 sono curvenulle. Inoltre il campo vettoriale di killing che avevamo trovato per la metricadi Schwarzschild, ∂
∂t , nelle coordinate U′ e V′ diventa
k = κ(
V′∂
∂V′−U′
∂
∂U′)
. (3.9.12)
È facile verificare che k∣∣∣U′=0
è normale all’ipersuperficie U′ = 0. Ciò, in
particolare, dimostra che U′ = 0 è un orizzonte di Killing.
3.10 Accelerazione sull’orizzonte
Proposizione 3.10.1. L’accelerazione propria di una particella in x = a−1 nellospaziotempo di Rindler è costante ed uguale ad a.
Dimostrazione. Una particella che si muove su un’orbita di tipo tempo Xµ(τ) diun campo vettoriale di Killing ξ ha quadrivelocità data da
uµ =ξµ(− ξ2
) 12
, (3.10.1)
dato che u ∝ ξ e u · u = −1. La sua quadriaccelerazione, invece, è data da
aµ =Duµ
dτ
=ξν∇νξµ
−ξ2 +
(ξν∂νξ2)ξµ
2(ξ2)2 . (3.10.2)
Osserviamo ora che ξν∂νξ2 = 2ξµξν∇µξν = 0 per un campo vettoriale di Killing.Da ciò abbiamo che
aµ =ξν∇νξµ
−ξ2 (3.10.3)
e l’accelerazione propria è il modulo di aµ, |a|.Nello spaziotempo di Rindler possiamo porre ξ = k. Troviamo quindi che
aµ∂µ =1
U′∂
∂V′+
1V′
∂
∂U′(3.10.4)
37
Capitolo 3. Buco Nero di Schwarzschild
e che
|a| ≡(
gµν aµaν) 1
2 =(− 1
U′V′) 1
2
=1x
(3.10.5)
Quindi per x = a−1 costante abbiamo |a| = a, cioè le orbite di k nello spazio-tempo di Rindler sono linee di universo con accelerazione propria costante.L’accelerazione cresce asintoticamente per x→ 0, così che che l’orizzonte diKilling in x = 0 è chiamato orizzonte d’accelerazione.
Nonostante l’accelerazione propria di una linea d’universo con x = costantediverge per x→ 0, l’accelerazione misurata da un altro osservatore rimane finita.Siccome
dτ2 = (κx)2dt2 , (3.10.6)
in x = a−1 costante, l’accelerazione misurata da un osservatore il cui tempoproprio è t è data da (dτ
dt
)1x= (κx)
1x= κ , (3.10.7)
che rimane finita per x→ 0. Un osservatore che misura un tempo t non è altroche un osservatore lontano nello spaziotempo di Schwarzschild. Da quantoappena detto deduciamo che la gravità superficiale, κ, è la forza per unità di massache deve esercitare un osservatore a infinito per tenere una particella ferma sull’orizzonte.Questo giustifica il termine “gravità superficiale” per κ.
3.11 Diagrammi di Carter-Penrose
Un buco nero è una “regione dello spaziotempo da cui nessun segnale puòscappare ad infinito” (Penrose). Questa definizione non è del tutto soddisfacente,nel senso che “infinito” non fa parte della struttura dello spaziotempo. Tuttuaviala “definizione” riguarda la struttura causale dello spaziotempo che rimaneinvariata dopo compattificazione conforme
ds2→ ds2 = Λ2(r, t)ds2 , Λ 6= 0. (3.11.1)
Possiamo scegliere Λ in modo che tutti i punti ad infinito nella metrica originalesi trovino ora per un valore finito del parametro affine nella nuova metrica.
38

Capitolo 3. Buco Nero di Schwarzschild
Perché questo avvenga dobbiamo scegliere Λ tale che
Λ(r, t)→ 0 per|r| →∞ e/o |t| →∞ . (3.11.2)
In questo caso “infinito” può essere identificato nei punti (r, t) per cui Λ(r, t) = 0.Questi punti non fanno parte dello spaziotempo originale, ma possono essereaggiunti ad esso per dare una compattificazione conforme dello spaziotempo.
Esempio 1. Nello spaziotempo di Minkowski abbiamo la seguente espres-sione per la metrica
ds2 = −dt2 + dr2 + r2dΩ2 . (3.11.3)
Poniamo u = t− r
v = t + r
→ ds2 = −dudv +
(u− v)2
4dΩ2 . (3.11.4)
Poniamo ora, invece,u = tanU − π
2 < U < π2
v = tanV − π2 < V < π
2
con V ≥ U , poiché r ≥ 0 (3.11.5)
In queste coordinate
ds2 =(
2 cosU cos V)−2[
− 4dUdV + sin2(
U − V)
dΩ2]
. (3.11.6)
Per avvicinarci a “infinito” in questa metrica dobbiamo prendere |U| → π2 o
|V| → π2 . Scegliendo, quindi,
Λ = 2 cosU cos V (3.11.7)
portiamo questi punti ad un valore finito del parametro affine nella nuovametrica
ds2 = Λds2 = −4dUdV + sin2(
U − V)
dΩ2 . (3.11.8)
Possiamo ora aggiungere “questi punti ad infinito”. Tenendo in conto dellarestrizione V > V, questi punti sono
U = −π2
V = π2
⇔
u→−∞
v→∞
⇔
r→∞
t finito
infinito spaziale, i0
39

Capitolo 3. Buco Nero di Schwarzschild
U = ±π
2
V = ±π2
⇔
u→±∞
v→±∞
⇔
t→±∞
r finito
infinito temporale, i±
U = −π
2
|V| = π2
⇔
u→−∞
vfinito
⇔
r→∞
t→−∞
r + t finito
I−
|U| 6= −π
2
V = π2
⇔
ufinito
v→∞
⇔
r→∞
t→∞
r− t finito
I+
Lo spaziotempo di Minkowski è, quindi, incorporato nel nuovo spaziotempocon metrica ds2 con frontiera in Λ = 0.
Introduciamo ora due nuove coordinate, τ e χ, definite da
τ = V + U , χ = V − U . (3.11.9)
In tali coordinate riscriviamo la metrica ds2 come
ds2 = Λds2 = −dτ2 + dχ2 + sin2 χdΩ2 (3.11.10)
Λ = cosτ + cosχ . (3.11.11)
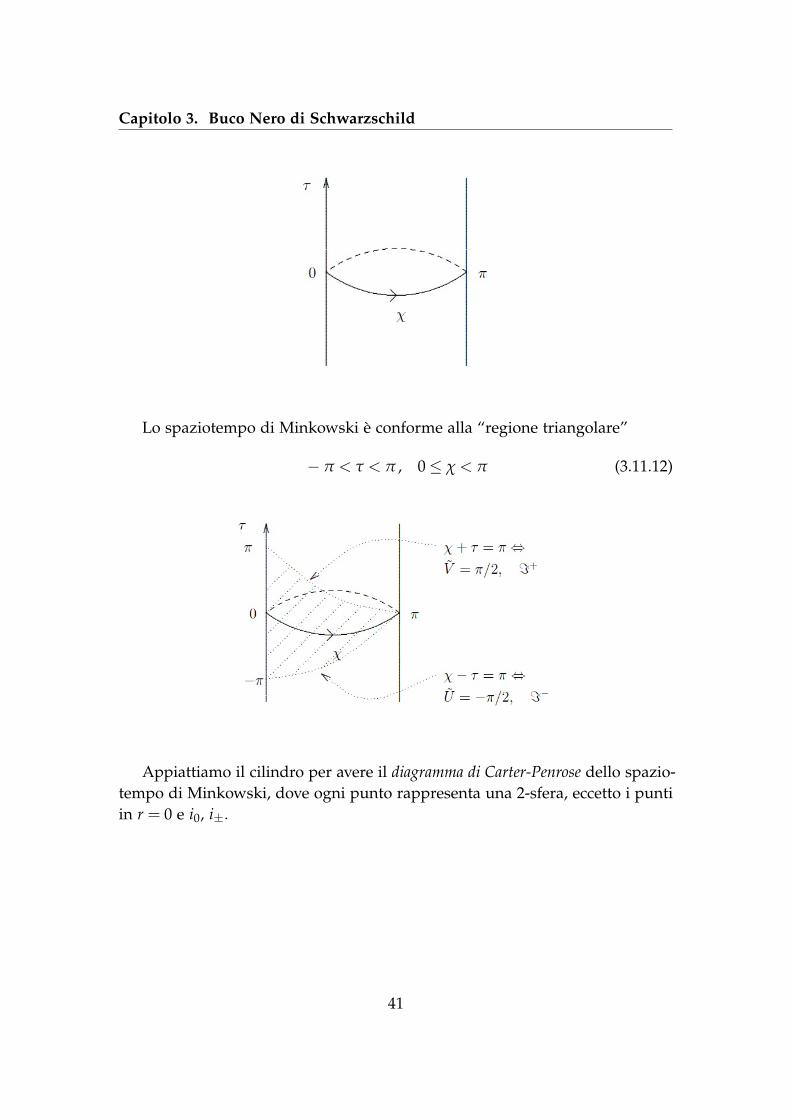
χ è una variabile angolare definita sempre a meno di 2π. Se non ci sono altrerestrizioni sul campo di variabilità di τ e χ, allora la metrica ds2 è quelladell’universo statico di Einstein(E.S.U.), con topologia R(tempo) × S3 (spazio).
La 2-sfera con χ costante (χ 6= 0,π) ha raggio |sinχ|. Se rappresentiamo ogni2-sfera con χ costante come un punto l’E.S.U può essere disegnato come uncilindro.
40
Capitolo 3. Buco Nero di Schwarzschild
Lo spaziotempo di Minkowski è conforme alla “regione triangolare”
− π < τ < π , 0≤ χ < π (3.11.12)
Appiattiamo il cilindro per avere il diagramma di Carter-Penrose dello spazio-tempo di Minkowski, dove ogni punto rappresenta una 2-sfera, eccetto i puntiin r = 0 e i0, i±.
41

Capitolo 3. Buco Nero di Schwarzschild
3.12 Singolarità nude
La singolarità in r = 0 che si presenta nel collasso a simmetria sferica ènascosta, cioè nessun segnale da essa può uscire per raggiungere la regioneI+. Questo in generale non è vero, invece, per lo spaziotempo di Kruskaldal momento che un segnale da r = 0 nella soluzione di buco bianco puòraggiungere la regione I+. In quest’ultimo caso la singolarità è detta esserenuda.
Un altro esempio di singolarità nuda si ottiene ponendo M < 0 nellasoluzione di Schwarzschild
ds2 = −(
1 +2|M|
r
)dt2 +
(1 +
2|M|r
)−1dr2 + r2
(sin2 θdφ2 + dθ2
). (3.12.1)
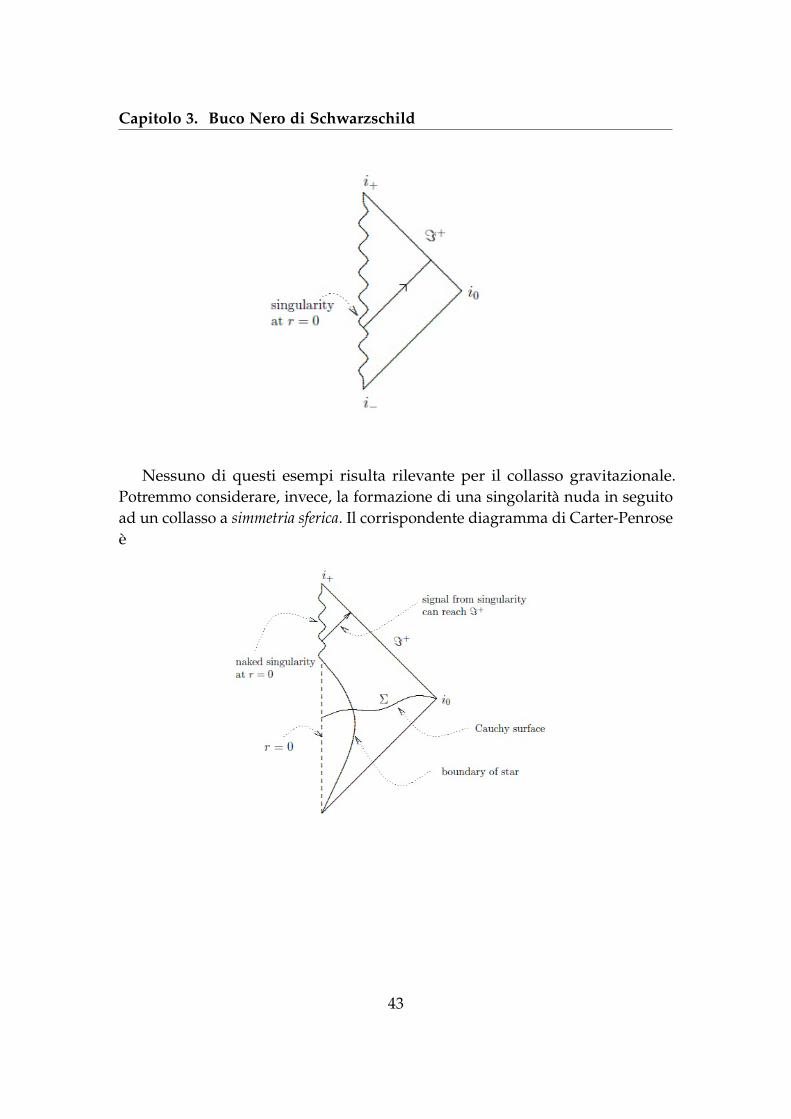
Questa particolare soluzione risolve le equazioni di Einstein per cui a priorinon dovremmo escluderla. Il diagramma di Carter-Penrose corrispondente è ilseguente:
42
Capitolo 3. Buco Nero di Schwarzschild
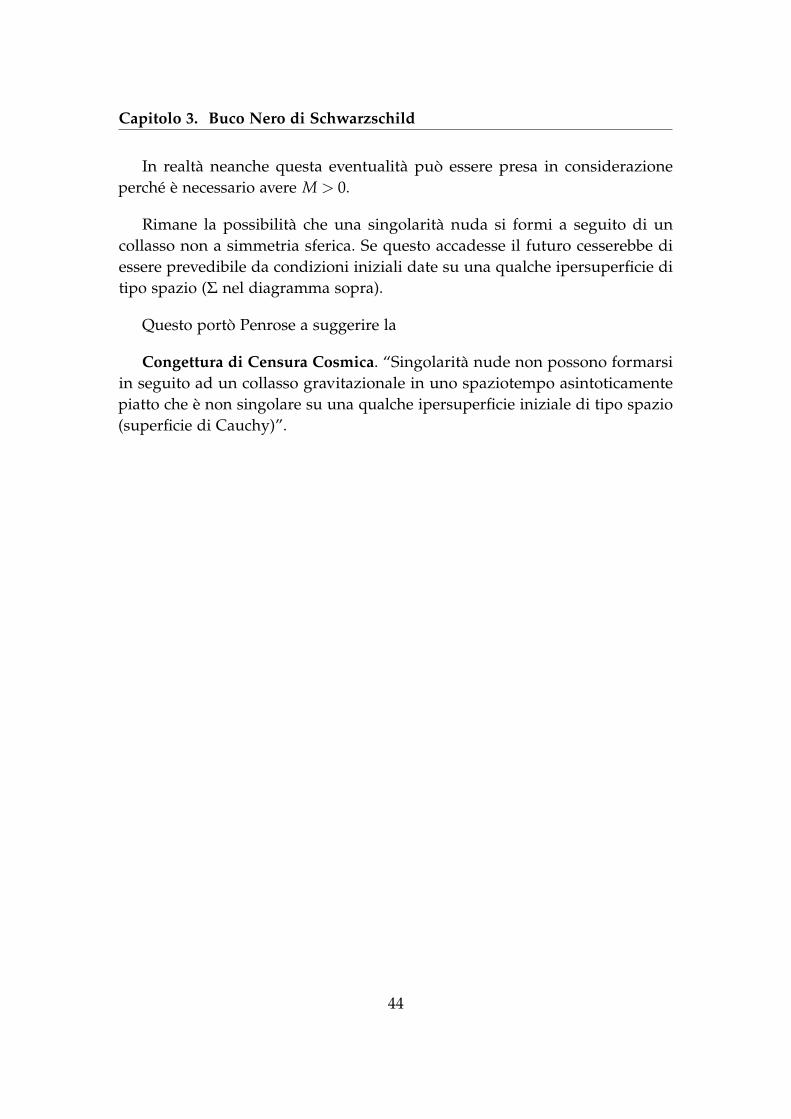
Nessuno di questi esempi risulta rilevante per il collasso gravitazionale.Potremmo considerare, invece, la formazione di una singolarità nuda in seguitoad un collasso a simmetria sferica. Il corrispondente diagramma di Carter-Penroseè
43
Capitolo 3. Buco Nero di Schwarzschild
In realtà neanche questa eventualità può essere presa in considerazioneperché è necessario avere M > 0.
Rimane la possibilità che una singolarità nuda si formi a seguito di uncollasso non a simmetria sferica. Se questo accadesse il futuro cesserebbe diessere prevedibile da condizioni iniziali date su una qualche ipersuperficie ditipo spazio (Σ nel diagramma sopra).
Questo portò Penrose a suggerire la
Congettura di Censura Cosmica. “Singolarità nude non possono formarsiin seguito ad un collasso gravitazionale in uno spaziotempo asintoticamentepiatto che è non singolare su una qualche ipersuperficie iniziale di tipo spazio(superficie di Cauchy)”.
44

Capitolo 4
Buchi Neri Carichi
In questo capitolo generalizzeremo la soluzione di Schwarzschild al caso dibuchi neri massivi e carichi e ne studieremo le relative implicazioni.
4.1 Soluzione di Reissner-Nordstrom
Consideriamo l’azione di Einstein-Maxwell
S =1
16πG
∫d4x
√−g[R− Fµν Fµν
]. (4.1.1)
L’inusuale normalizzazione del termine di Maxwell implica che l’intensitàdella forza di Coulomb che si esercita tra due cariche Q1 e Q2 separate da unadistanza r (grande) in uno spazio piatto è
G|Q1||Q2|r
. (4.1.2)
Le equazioni di Einstein-Maxwell nel vuoto sono (cfr. (2.2.6) e (2.3.5))
Gµν = 2(
Fµλ Fνλ − 1
4gµν Fρσ Fρσ
)(4.1.3)
∇µFµν = 0, (4.1.4)
Queste equazioni ammettono soluzione a simmetria sferica. Tale soluzione è la
45

Capitolo 4. Buchi Neri Carichi
soluzione di Reissner-Nordstrom (che generalizza la soluzione di Schwarzschild)
ds2 = −(
1− 2Mr
+Q2
r2
)dt2 +
(1− 2M
r+
Q2
r2
)−1
dr2 + r2(sin2 θdφ2 + dθ2) .
(4.1.5)
A =Qr
dt ,(
Fµν = ∂µ Aν − ∂ν Aµ
). (4.1.6)
Il parametro Q è la carica del buco nero.La metrica di Reissner-Nordstrom può anche essere scritta come
ds2 = −∆r2 dt2 +
r2
∆dr2 + r2dΩ2 , (4.1.7)
dove∆ = r2 − 2Mr + Q2 = (r− r−)(r− r+) (4.1.8)
con r±, non necessariamente reali, dati da
r± = M±√
M2 −Q2 . (4.1.9)
In generale si devono considerare tre casi. A questo problema sono dedicate letre prossime sezioni.
4.2 Singolarità nude in RN
Come primo caso consideriamo quello per cui M < Q.
∆ non ha radici reali e quindi non esiste un orizzonte. La singolarità inr = 0 risulta essere nuda. Questo caso è simile al caso già citato in cui M < 0nella metrica di Schwarzschild. In accordo con la congettura di censura cosmicaun caso simile non può verificarsi in seguito ad un collasso gravitazionale. Aconferma di quanto abbiamo appena detto, consideriamo il caso di un gusciodi materia con carica Q e raggio R nella teoria Newtoniana della gravitazioneincorporando però:
1. equivalenza della massa inerziale con l’energia totale, dalla relativitàspeciale,
2. equivalenza fra massa inerziale e massa gravitazionale, dalla relativitàgenerale.
46

Capitolo 4. Buchi Neri Carichi
M = M0 +GQ2
R− GM2
R. (4.2.1)
Tale legge esprime sostanzialmente il difetto di massa per un oggetto carico.Infatti il primo termine corrisponde all’energia totale, il secondo è la massa ariposo dell’oggetto, mentre il terzo e il quarto sono rispettivamente l’energiapotenziale Coulombiana e gravitazionale.
Questa è un’equazione quadratica in M. L’unica soluzione sensata dell’equa-zione è
M(R) =1
2G
[(R2 + 4GM0R + 4G2Q2
) 12 − R
]. (4.2.2)
Il guscio subirà il collasso solo se M decresce con R. Calcoliamo quindi
dMdR
=G(M2 −Q2)
2MGR + R2 . (4.2.3)
Dall’ultima relazione si vede che il collasso avviene solo se M > |Q|, come ciaspettavamo.
Vediamo ora cosa succede ad M se facciamo il limite R→ 0. Facendo talelimite nella (4.2.2) si ottiene che
M→ |Q| , indipendentemente da M0 . (4.2.4)
La relatività generale risolve, dunque, il problema della self-energia infinitanell’elettromagnetismo classico per una particella puntiforme. Una particellapuntiforme diventa un buco nero estremo di Reissner-Nordstrom (caso (iii)).
Osservazione L’elettrone ha M |Q|, dato che l’attrazione gravitazionaleè nettamente inferiore alla repulsione elettrostatica. Tuttavia l’elettrone è unoggetto intrinsecamente quantistico, dato che la sua lunghezza Compton èmolto maggiore del suo raggio di Schwarzschild. I limiti di applicabilità dellarelatività generale prevedono, invece, che
Lunghezza ComptonRaggio di Schwarzschild
=h/Mc
MG/c2 =hc
M2G 1, (4.2.5)
cioè
M( hc
G
) 12 ≡ Mp (Massa di Planck) . (4.2.6)
L’ultima relazione è in generale soddisfatta da ogni oggetto macroscopico, ma
47

Capitolo 4. Buchi Neri Carichi
non da particelle elementari.
4.3 Coordinate di Kruskal in RN
Come secondo caso consideriamo quello per cui M > |Q|.
∆ si annulla in r = r+ e in r = r− reali. La metrica risulta quindi singolare,ma, come vedremo fra breve, queste sono singolarità coordinate. Per vederequanto abbiamo detto procediamo esattamente come nel caso di r = 2M nellametrica di Schwarzschild. Definiamo la coordinata r∗ in base a
dr∗ =r2
∆dr =
dr
1− 2Mr + Q2
r2
. (4.3.1)
In particolare, risulta che
r∗ = r +1
2κ+ln(|r− r+|
r+
)+
12κ−
ln(|r− r−|
r−
), (4.3.2)
dove κ± è dato da
κ± =r± − r∓
2r2±
. (4.3.3)
Introduciamo ora le coordinate radiali nulle u, v come prima
v = t + r∗ , u = t− r∗ . (4.3.4)
La metrica di Reissner-Nordstrom può essere, quindi, riscritta nelle coordinatedi Eddington-Finkelstein entranti (v,r,θ,φ)
ds2 = −∆r2 dv2 + 2dvdr + r2dΩ2 . (4.3.5)
Queste coordinate sono non singolari ovunque eccetto per r = 0. Quindi lesingolarità che si incontrano per ∆ = 0 nella metrica di Reissner-Nordstrom sonosingolarità coordinate. Le ipersuperfici che si trovano imponendo r = costantesono nulle quando grr = ∆
r2 = 0, cioè quando ∆ = 0. Questo, in particolare mostracome r = r± siano ipersuperfici nulle, N±.
Proposizione 4.3.1. Le ipersuperfici nulle N± della metrica di Reissner-Nordstromsono orizzonti di Killing del campo vettoriale di Killing ∂
∂v (estensione di ∂∂t in coordinate
48

Capitolo 4. Buchi Neri Carichi
di Reissner-Nordstrom) con gravità superficiale κ±.
Dimostrazione. I vettori normali a N± sono
l± = f±(
grr ∂
∂r+ gvr ∂
∂v
)= f±
∂
∂v(4.3.6)
(notare che grr = 0 su N± e gvr = 1) per qualche funzione arbitraria f± chepossiamo scegliere in modo che lν
±∇νlµ± = 0, cioè tale che l sia tangente a
qualche curva parametrizzata in modo affine. In particolare si vede che
∂
∂v= f−1± l± . (4.3.7)
L’ultima relazione mostra come N± siano orizzonti di Killing di ∂∂v . Quest’ulti-
mo, infatti, è un campo vettoriale di Killing perché la metrica in coordinate diEddington-Finkelstein è indipendente da v.
Dimostriamo ora che la gravità superficiale su N± è data proprio da κ±. Atal proposito calcoliamo
kν∇νkr = Γrvv = −
12
grr gvv ,r = 0, su N± (4.3.8)
kν∇νkv = Γvvv = −
12
gvr gvv ,r =1
2r2∂∆∂r
=1
2r2±(r± − r∓) su N±
= κ± . (4.3.9)
Quindi, in particolare,kν∇νkµ = κ±kµ (4.3.10)
Siccome k = ∂∂t in coordinate statiche si ha che k2→−1 per r→∞. Possiamo
quindi identificare κ± con la gravità superficiale di N±.
Introduciamo ora un nuovo insieme di coordinate definito dalle equazioni
U± = −e−κ±u , V = eκ±v . (4.3.11)
49

Capitolo 4. Buchi Neri Carichi
Scegliendo dapprima i segni superiori, l’espressione della metrica in questecoordinate è
ds2 = −r+r−κ2+
e−2κ+r
r2
( r−r− r−
)( κ+κ−−1
)dU+dV+ + r2dΩ2 , (4.3.12)
dove r è dato implicitamente in funzione di U+ e V+ dalla formula
U+V+ = −e2κ+r(r− r+
r+
)(r− r−r−
)( κ+κ−
). (4.3.13)
La metrica espressa in queste coordinate copre quattro regioni della massimaestensione analitica della metrica di Reissner-Nordstrom,
Questo sistema di coordinate non copre la regione r ≤ r− dal momento chela metrica ha una singolarità in r = r−, e, inoltre, risulta che il prodotto U+V+
in tale regione non è più reale.Tuttavia possiamo introdurre un sistema di coordinate in cui la suddetta
regione non risulti singolari. Consideriamo, quindi, il sistema di coordinatadefinito dalla (4.3.11), scegliendo, stavolta, i segni inferiori. La metrica, riscrittain queste coordinate, diventa dunque
ds2 = −r+r−κ2−
e−2κ−r
r2
( r+r+ − r
)( κ−κ+−1)
dU−dV− + r2dΩ2 . (4.3.14)
50

Capitolo 4. Buchi Neri Carichi
In questo caso, invece, la dipendenza di r da U−V− è data implicitamente da
U−V− = −e−2κ−r(r− − r
r−
)(r+ − rr+
)( κ−κ+
). (4.3.15)
Questa metrica copre quattro regioni intorno a U− = 0 e V− = 0.
La regione II è la stessa regione II coperta dalle coordinate (U+,V+). Lealtre regioni, invece, sono nuove. Le regioni V e VI contengono la singolarità inr = 0, che è di tipo tempo: la normale a r = costante è di tipo spazio per ∆ > 0,come ad esempio in r < r−.
Sappiamo che la regione II del diagramma è connessa con uno spaziotempoesterno nel passato (le regioni I, III, IV) e, quindi, per invarianza per riflessionetemporale, la regione III’ deve essere connessa ad un’altra regione esterna(regioni I’, II’ e IV’).
51

Capitolo 4. Buchi Neri Carichi
Le regioni I’ e IV’ costituiscono un nuovo spaziotempo esterno asintotica-mente piatto. Continuando in questo modo si possono trovare infinite regionidel genere.
Collasso a simmetria sferica di un buco nero carico
Consideriamo una “palla di polvere” (senza pressione) sferica per cui ogniparticella di polvere ha un rapporto carica/massa dato da
γ =QM
, |γ| < 1 (4.3.16)
dove Q è la carica elettrica totale e M la massa totale. La metrica fuori dallapalla di polvere è quella di Reissner-Nordstrom con M > Q.
La traiettoria di una particella sulla superficie è la stessa di una particella,con rapporto massa/carica dato proprio da γ, che cade radialmente verso ilcentro nello spaziotempo di Reissner-Nordstrom. La traiettoria, in generale, nonseguirà un moto geodetico a causa della repulsione elettrostatica. Non è difficilevedere che la traiettoria di un punto sulla superficie obbedisce all’equazione1
(drdτ
)2
= ε2 −Ve f f , (4.3.17)
dove
Ve f f = 1− (1− εγ2)2M
r+ (1− γ2)
Q2
r2 (4.3.18)
1vedi Problema 2 in Appendice
52

Capitolo 4. Buchi Neri Carichi
r0 =1− γ2
1− εγ2Q2
M=
γ2(1− γ2)
1− εγ2 M . (4.3.19)
Il collasso viene quindi arrestato dalla repulsione elettrostatica. Tutte le curvedi tipo tempo che entrano nella regione r < r+ sono costrette a entrare nellaregione r < r−, cosi che il “rimbalzo” avvenga nella regione V. La particelladi polvere quindi entra nella regione III’, esplode come un buco bianco nellaregione I’ e può così ricominciare il collasso.
Tutto ciò è illustrato nel seguente diagramma di Carter-Penrose
L’esistenza di “tunnel” che permettono di raggiungere altri “universi” èalquanto bizzarra. Dobbiamo, infatti, considerare che l’esistenza di questi tunneldipende in modo molto sensibile dalle simmetrie assunte nello spaziotempo
53

Capitolo 4. Buchi Neri Carichi
di Reissner-Nordstrom, staticità e simmetria sferica. Queste simmetrie nonrisultano essere esatte nella realtà e ogni piccola perturbazione ha un effettodrammatico nella struttura interna del buco nero. I tunnel sono instabili e noncompaiono nella realtà fisica.
4.4 Buchi Neri estremi di RN
Come terzo e ultimo caso consideriamo quello per cui M = Q. Un corposiffatto è chiamato buco nero estremo di Reissner-Nordstrom. In questo casol’espressione della metrica è data da
ds2 = −(
1− Mr
)2dt2 +
dr2(1− M
r)2 + r2dΩ2 . (4.4.1)
In questa metrica si incontra una singolarità in r = M che, come vedremo, è unasingolarità dovuta al sistema di coordinate. Introduciamo quindi la coordinatadi Regge-Wheeler
r∗ = r + 2M ln∣∣∣∣r−M
M
∣∣∣∣− M2
r−M(4.4.2)
che implica la seguente relazione per i differenziali
dr∗ =dr
1− Mr
. (4.4.3)
Introduciamo le coordinate entranti di Eddington-Finkelstein come sopra.L’espressione dell’intervallo diventa, quindi,
ds2 = −(
1− Mr
)2dv2 + 2dvdr + r2dΩ2 . (4.4.4)
Questa metrica è non singolare sull’ipersuperficie nulla r = M. Seguendo unragionamento analogo a quello visto prima, si può dimostrare che r = M è unorizzonte di Killing del campo vettoriale di Killing ∂
∂v con gravità superficialenulla.
È importante notare che, siccome k è un vettore di tipo nullo su r = M, madi tipo tempo altrove, la regione II scompare e la regione I porta direttamentealla regione V.
54
Capitolo 5
Buchi Neri Rotanti
In questo capitolo ci proponiamo di studiare quei buchi neri che, oltre allamassa e alla carica, posseggono anche un momento angolare. In particolarestudieremo la soluzione di Kerr e le relative implicazioni.
5.1 Teoremi di unicità
Definizione 5.1.1. Uno spaziotempo asintoticamente piatto è stazionario se esolo se esiste un campo vettoriale di Killing, k, che è di tipo tempo a ∞.
Osservazione 5.1.1. In generale, è possibile normalizzare k in modo che a infinitok→−1.
Fuori da un possibile orizzonte k = ∂∂t , dove t è il tempo coordinata. La
forma generale dell’intervallo di uno spaziotempo stazionario, quindi, assumela forma
ds2 = gtt(~x)dt2 + 2gti(~x)dtdxi + gij(~x)dxidxj . (5.1.1)
Uno spaziotempo stazionario, inoltre, è detto statico se è invariante per inversio-ne temporale. Questo equivale a richiedere che gti = 0. La metrica, in questocaso, diventa
ds2 = gtt(~x)dt2 + gij(~x)dxidxj . (5.1.2)
Definizione 5.1.2. Uno spaziotempo asintoticamente piatto è detto essere simme-trico rispetto a un asse se esiste un campo vettoriale di Killing m (campo vettorialedi Killing “assiale”) che è di tipo spazio a ∞ e le cui orbite sono chiuse.
55

Capitolo 5. Buchi Neri Rotanti
Possiamo scegliere un sistema di coordinate tale che
m =∂
∂φ(5.1.3)
dove φ è una coordinata che ha un intervallo di variabilità di 2π, in modoche m2
r2 → 1 per r → ∞. Così, come per k, esiste una naturale scelta per lanormalizzazione per un campo vettoriale di Killing assiale in uno spaziotempoasintoticamente piatto.
Teorema 5.1.1 (Birkhoff). Il teorema di Birkhoff afferma che ogni soluzione di vuotoa simmetria sferica è statica.
Osservazione 5.1.2. Il fatto che ogni soluzione di vuoto a simmetria sferica siastatica implica effettivamente che sia di Schwarzschild.
Osservazione 5.1.3. Una generalizzazione di questo teorema ad un sistemadi Einstein-Maxwell mostra che l’unica soluzione a simmetria sferica sia diReissner-Nordstrom.
Supponiamo ora di sapere solamente che la metrica esterna ad una stella siastatica. Sfortunatamente non sappiamo ancora se si tratta di uno spaziotempo asimmetria sferica. Per questo problema esiste però un teorema,
Teorema 5.1.2 (Israel). Il teorema di Israel afferma che ogni spaziotempo asintotica-mente piatto, statico e nel vuoto, che è non singolare al di fuori e su un orizzonte deglieventi, è di Schwarzschild.
Tuttavia riveste un ruolo ben più importante il seguente teorema
Teorema 5.1.3 (Carter-Robinson). Uno spaziotempo stazionario asintoticamentepiatto e simmetrico rispetto a un asse nel vuoto che è non singolare al di fuori e su unorizzonte degli eventi fa parte della famiglia a due parametri di Kerr. I parametri sonola massa M e il momento angolare J.
L’assunzione della simmetria rispetto a un asse è stata mostrata esserenon necessaria. Per cui risulta, effettivamente, che la stazionarietà implica lasimmetria assiale di una soluzione (Hawking, Wald).
Questi tre teoremi possono essere generalizzati per le equazioni di vuoto diEinstein-Maxwell. Il risultato è che lo spaziotempo di un buco nero stazionariopuò dipende solo da tre parametri: si dice che il buco nero faccia parte della
56

Capitolo 5. Buchi Neri Rotanti
famiglia a tre parametri di Kerr-Newman. In coordinate di Boyer-Lindquist (BL)la metrica di Kerr-Newman è
ds2 = − (∆− a2 sin2 θ)
Σdt2 − 2a sin2 θ
(r2 + a2 − ∆)Σ
dtdφ
+
((r2 + a2)2 − ∆a2 sin2 θ
Σ
)sin2 θ dφ2 +
Σ∆
dr2 + Σ dθ2 ,(5.1.4)
doveΣ = r2 + a2 cos2 θ (5.1.5)
∆ = r2 − 2Mr + a2 + e2 . (5.1.6)
I tre parametri sono M, a ed e. Il parametro a è legato al momento angolaredalla relazione
a =J
M, (5.1.7)
dove J è il momento angolare totale, mentre
e =√
Q2 + P2 , (5.1.8)
dove Q e P sono le cariche di monopolo elettrica e magnetica, rispettivamente.La 1-forma di Maxwell, invece, è data da
A =Qr(dt− asin2 θdφ
)− Pcosθ
[adt− (r2 + a2)dφ
]Σ
. (5.1.9)
Osservazione 5.1.4. Quando a = 0 la soluzione di Kerr-Newman si riduce allasoluzione di Reissner-Nordstrom.
Osservazione 5.1.5. Facendo l’inversione φ→ −φ cambia anche il segno di a,possiamo quindi scegliere a ≥ 0 senza perdita di generalità.
Osservazione 5.1.6. La soluzione di Kerr-Newman ha le isometrie discrete t→−te φ→−φ.
5.2 Soluzione di Kerr
La soluzione di Kerr si ottiene dalla soluzione di Kerr-Newman ponendo e = 0.In particolare risulta che
∆ = r2 − 2Mr + a2 , (5.2.1)
57

Capitolo 5. Buchi Neri Rotanti
mentre la Σ rimane invariata.
La metrica di Kerr, in coordinate di Boyer-Lindquist ha singolarità coordinatein
1. θ = 0
2. ∆ = 0.
Riscriviamo ∆ come∆ = (r− r+)(r− r−) , (5.2.2)
dover± = M±
√M2 − a2 . (5.2.3)
Anche in questo caso dobbiamo considerare tre casi che saranno presentati nelleprossime sezioni.
5.3 Singolarità nude nella metrica di Kerr
Consideriamo dapprima il caso M2 < a2.
∆ non ha radici reali e quindi non ci sono singolarità per r = r±. La metricaha ancora una singolarità di coordinate in θ = 0. Più significativa invece è lasingolarità in Σ = 0 che, invece, è una vera singolarità dello spaziotempo. Talesingolarità si trova per i valori di r e θ dati da
r = 0, θ =π
2. (5.3.1)
La natura di questa singolarità può essere discussa introducendo le coordinatedi Kerr-Schild (t, x,y,z) (che, inoltre, rimuovono la singolarità in θ = 0). Questesono definite da
t =∫ (
dt +r2 + a2
∆dr)− r (5.3.2)
x + iy = (r + ia)sinθ exp[i∫ (
dφ +a∆
dr)]
(5.3.3)
z = r cosθ (5.3.4)
che implicano che r = r(x,y,z) sia data implicitamente da
r4 − (x2 + y2 + z2 − a2)r2 − a2z2 = 0. (5.3.5)
58

Capitolo 5. Buchi Neri Rotanti
In queste coordinate la metrica assume la forma
ds2 = −dt2 + dx2 + dy2 + dz2
+2Mr3
r4 + a2z2
[r(xdx + ydy)− a(xdy− ydx)r2 + a2 +
zdzr
+ dt]2
;(5.3.6)
quest’ultima mostra chiaramente che lo spaziotempo è piatto quando M = 0
Le superfici con t e r costanti sono ellissoidi confocali che degenerano perr = 0 nel disco z = 0, x2 + y2 ≤ a2.
La regione del grafico con θ = π2 corrisponde al contorno del disco x2 + y2 =
a2. Si vede così che la singolarità di curvatura si presenta sul bordo del disco.In generale r non deve essere necessariamente maggiore di zero. Lo spa-
ziotempo può essere continuato analiticamente attraverso il disco in un’ altraregione asintoticamente piatta con r < 0.
Struttura Causale
Dal momento che il sistema gode di simmetria assiale abbiamo bisogno di undiagramma tridimensionale per studiare la struttura causale dello spaziotempo.Tuttavia le sottovarietà con θ = 0, π
2 sono totalmente geodetiche, cioè se unageodetica è inizialmente tangente alla sottovarietà essa rimarrà tale durantetutto il moto. Possiamo così dare i diagrammi di Carter-Penrose per questesottovarietà.
59

Capitolo 5. Buchi Neri Rotanti
Per θ = π2 ogni punto del diagramma rappresenta un cerchio (si ha infatti
che 0≤ φ < 2π). Ogni geodetica radiale entrante urterà la singolarità ad anelloin r = 0, che è chiaramente nuda.
Per θ = 0, invece, si considerano solo geodetiche sull’asse di simmetria.Geodetiche radiali nulle passano attraverso il disco in r = 0 e finiscono nellaregione r < 0. Possiamo riassumere i due diagrammi in uno solo
Tuttavia lo spaziotempo risulta non avere senso fisico. Consideriamo, infatti,
60

Capitolo 5. Buchi Neri Rotanti
la norma del campo vettoriale di Killing m = ∂∂φ
m2 = gφφ = a2 sin2 θ
(1 +
r2
a2
)+
Ma2
r
(2sin4 θ
1 + a2
r2 cos2 θ
). (5.3.7)
Poniamo ora ra = δ (piccolo) e consideriamo θ = π
2 + δ. Risulta allora
m2 = a2 +Maδ
+O(δ) , per δ 1
< 0 per piccoli valori negativi di δ
Si vede così che m diventa un vettore di tipo tempo vicino alla singolarità adanello nella regione r < 0; inoltre le orbite di m sono chiuse. Lo spaziotempo cosìcostruito ammette curve di tipo tempo chiuse. In generale ciò non è possibileperché si violerebbe il principio di causalità.
Tuttavia dobbiamo ricordarci che stiamo considerando uno spaziotempo consingolarità nuda e, in virtù del principio di censura cosmica, una tale eventualitànon può verificarsi a seguito di un collasso gravitazionale.
5.4 Coordinate di EF in Kerr e buchi neri estremi
Consideriamo ora il caso M2 > a2.
Sotto questa condizione si ha ancora una singolarità ad anello, però lametrica (espressa in coordinate BL) è singolare in r = r+ e r = r−. Queste, comevedremo, sono singolarità dovute alla scelta del sistema di coordinate.
Introduciamo le coordinate v e χ definite rispetto alle vecchie variabili da
dv = dt +r2 − a2
∆dr (5.4.1)
dχ = dφ +a∆
dr . (5.4.2)
Si può, quindi, riscrivere la metrica di Kerr nelle coordinate (v,r,θ,χ), analoghe
61

Capitolo 5. Buchi Neri Rotanti
alle coordinate di Eddington-Finkelstein per la metrica si Schwarzschild
ds2 = −∆− a2 sin2 θ
Σdv2 + 2dv dr− 2asin2 θ(r2 + a2 − ∆)
Σdvdχ
− 2asin2 θ dχ dr +
[(r2 + a2)2 − ∆a2 sin2 θ
]Σ
sin2 θdχ2 + Σdθ2 .
(5.4.3)
La metrica è ora non singolare in ∆ = 0. Questo dimostra che le singolarità inr = r± della metrica, scritta in coordinate di BL, sono singolarità coordinate.
Proposizione 5.4.1. Le ipersuperfici r = r± sono orizzonti di Killing dei campivettoriali di Killing
ξ± = k +( a
r2± + a2
)m , (5.4.4)
con gravità superficiale data da
κ± =r± − r∓
2(r2± + a2)
(5.4.5)
Dimostrazione. Siano N± le ipersuperfici r = r±. I vettori normali, valutati suN±, sono
l± = f±gµr ∂µ , per qualche funzione non nulla f±
= −(
r2± + a2
r2± + a2 cos2 θ
)f±
(∂
∂v+
ar2± + a2
∂
∂χ
)
In particolare risulta che
ξ± =∂
∂v+
ar2± + a2
∂
∂χ. (5.4.6)
Per prima cosa notiamo che
l2± ∝
(gvv +
2ar2+a2 gvχ + a2
r2+a2 gχχ
)∣∣∣∆=0
= 0 (5.4.7)
per cui N± sono ipersuperfici nulle. Dato che ξ±
∣∣∣N±
∝ l±, tali ipersuperfici sono
effettivamente orizzonti di Killing di ξ±.
Rimane da calcolare ξν±∇νξµ. Calcolando tale prodotto si trova l’espressione
per κ±.
62

Capitolo 5. Buchi Neri Rotanti
Questi risultati possono essere utilizzati per trovare coordinate del tipodi Kruskal e ottenere la massima estensione analitica della metrica di Kerr-Newman. Anche in questo caso si ha un reticolo infinito di regioni isometriche.
Velocità angolare dell’orizzonte
L’orizzonte degli eventi è un orizzonte di Killing di
ξ = k + ΩHm , (5.4.8)
doveΩH =
ar2+ + a2
=J
2M[M2 +
√M4 − J2
] . (5.4.9)
In coordinate per cui k = ∂∂t e m = ∂
∂φ si ha che
ξµ∂µ(φ−ΩHt) = 0, (5.4.10)
cioè φ = ΩHt + costante su orbite di ξ, mentre φ rimane costante su orbite di k.
Le particelle che si muovono su orbite di ξ ruotano con velocità angolareΩH relativamente a particelle statiche, quelle sulle orbite di k, e quindi relativead un sistema stazionario a infinito. Siccome le geodetiche nulle generatricidell’orizzonte seguono le orbite di ξ si ha che il buco nero ruota con velocitàangolare ΩH.
Buchi neri estremi
Prendiamo ora il caso di M2 = a2.
Questa soluzione è chiamata buco nero estremo di Kerr. In questo caso si ha unorizzonte di Killing in r = M con gravità superficiale κ = 0 e campo vettorialedi Killing
ξ = k + ΩHm , ΩH =a
2M. (5.4.11)
63

Capitolo 5. Buchi Neri Rotanti
5.5 Ergosfera
Nonostante k sia un vettore di tipo tempo a infinito non è necessario che siatale ovunque al di fuori dell’orizzonte. Nello spaziotempo di Kerr
k2 = gtt = −∆− a2 sin2 θ
Σ= −
(1− 2Mr
r2 + a2 cos2 θ
)(5.5.1)
e, quindi, k è di tipo di tempo se
r2 + a2 cos2 θ − 2Mr > 0. (5.5.2)
Per M2 > a2 l’ultima relazione implica che, perché k sia di tipo tempo, deveessere
r > M +√
M2 − a2 cos2 θ . (5.5.3)
La frontiera di quest’ultima regione, cioè l’ipersuperficie
r = M +√
M2 − a2 cos2 θ , (5.5.4)
è chiamata ergosfera. L’ergosfera si incontra con l’orizzonte degli eventi quandoθ = 0 o π, per tutti i restanti valori di θ giace completamente fuori. Quindi kdiventa un vettore di tipo spazio in una certa regione al di fuori dell’orizzonte.Questa regione è chiamata ergoregione.
64

Capitolo 5. Buchi Neri Rotanti
5.6 Processo Penrose
Supponiamo di avere una particella che si avvicini ad un buco nero di Kerrlungo una geodetica. Chiameremo p il suo quadrimpulso. Possiamo identificarel’energia della particella come una costante del moto data da
E = −p · k . (5.6.1)
Supponiamo ora che la particella decada in altre due particelle, una delle qualifinisce nel buco nero mentre l’altra, invece, scappa a infinito.
Dalla conservazione dell’energia si ha che
E2 = E− E1 , (5.6.2)
dove E1 e E2 sono, rispettivamente, l’energia della prima e della seconda par-ticella ottenute dal decadimento. Normalmente si ha che E1 > 0, in modo cheE2 < E, ma, dato che l’energia della prima particella è data da
E1 = −p1 · k , (5.6.3)
non necessariamente si ha che E1 > 0, dal momento che che nella ergoregione kè di tipo spazio. Quindi, se il decadimento avviene nella ergoregione, dobbiamonecessariamente avere E2 > E. È stata quindi estratta energia dal buco nero. Ilprocesso di estrazione di energia dal buco nero è chiamato processo Penrose.
65
Appendice A
Esempi svolti
A.1 Problema 1
Trovare i raggi delle orbite circolari per una particella nel campo di un buconero di Schwarzschild.
Svolgimento
Risolviamo il problema non partendo dall’equazione del moto (2.1.1), mautilizzando la teoria di Hamilton-Jacobi. In relatività ristretta l’equazione diHamilton-Jacobi per una particella di massa m è data da
gµν ∂S∂xµ
∂S∂xν
+ m2 = 0, (A.1.1)
dove S è l’azione della particella. In virtù del Principio di minimo accoppiamentogravitazionale l’equazione rimane tale anche in relatività generale e, in questocaso, la metrica è quella di Schwarzschild.
Innanzitutto sappiamo che il problema è a simmetria centrale e, come tale,avviene su un piano. Scegliamo per semplicità il piano θ = π
2 . L’equazionediventa(
1− 2Mr
)−1(∂S∂t
)2
−(
1− 2Mr
)(∂S∂r
)2
− 1r2
(∂S∂φ
)2
−m2 = 0. (A.1.2)
Scegliamo l’azione della forma
S = −Et + Lφ + Sr(r) , (A.1.3)
66

Appendice A. Esempi svolti
dove E e L sono costanti del moto che corrispondono all’energia e al momentoangolare della particella. Sostituendo quest’ultima nell’equazione di Hamilton-Jacobi si trova che
Sr(r) =∫ [
E2(
1− 2Mr
)−2
−(
m2 +L2
r2
)(1− 2M
r
)−1] 1
2
dr . (A.1.4)
La dipendenza r = r(t) si trova, secondo le regole generali della teoria diHamilton-Jacobi, ponendo ∂S
∂E = costante. Da ciò si trova
t =EM
∫ (1− 2M
r
)−1[
E2
M2 −(
1 +L2
m2r2
)(1− 2M
r
)]− 12
dr (A.1.5)
o, in forma differenziale,(1− 2M
r
)−1 drdt
=1E
[E2 −m2
(1 +
L2
m2r2
)(1− 2M
r
)] 12
. (A.1.6)
Definiamo l’“energia potenziale efficace” V(r) la funzione
V(r) = m[(
1 +L2
m2r2
)(1− 2M
r
)] 12
, (A.1.7)
(1− 2M
r
)−1 drdt
=1E
[E2 −V2(r)
] 12
. (A.1.8)
La condizione E > V(r) definisce quindi le regioni ammissibili del moto come inmeccanica non relativistica. Le orbite circolari si trovano imponendo V′(r) = 0e E = V(r).
La prima di queste due condizioni dà
r1,2
2M=
L2
4m2M2
[1±
√1− 12m2M2
L2
]. (A.1.9)
Studiando il segno di V′(r) si trova che il segno superiore in r1,2 si riferiscealle orbite circolari stabili (minimo di V(r)). In particolare risulta che l’orbita
67

Appendice A. Esempi svolti
circolare stabile più vicina al centro è quella per cui
r = 6M , L =√
12mM , E =
√89
m . (A.1.10)
A.2 Problema 2
L’azione per una particella di massa m e carica q è
S =∫
dλ
[12
e−1xµ xνgµν(x)− 12
m2e− qxµ Aµ(x)]
, (A.2.1)
dove Aµ(x) è il quadripotenziale del campo elettromagnetico. Si può mostrareche se
Lξ Aµ = ξν∂ν Aµ + (∂µξν)Aν = 0 (A.2.2)
per un campo vettoriale di Killing ξ, allora S è invariante, al primo ordine inξ, sotto la trasformazione xµ→ xµ + αξµ(x). Verificare che la la corrispondentecarica di Noether associata
− ξµ(muµ − qAµ) , (A.2.3)
dove uµ è la quadrivelocità della particella, è una costante del moto. Verificare,inoltre, per la soluzione di Reissner-Nordstrom nel vuoto, con massa totale M ecarica totale Q, che Lξ A = 0 per k = ∂
∂t e, quindi dedurre, per m 6= 0, che(1− 2M
r+
Q2
r
)dtdτ
= ε− qm
Qr
, (A.2.4)
dove τ è il tempo proprio della particella e ε è l’energia per unità di massa.Mostrare che la traiettoria r(t) di una particella massiva con momento angolarenullo soddisfa(
drdτ
)2
= (ε2 − 1) +(
1− εqQ
mM
)2M
r+
(q2
r2 − 1)
Q2
r2 . (A.2.5)
Svolgimento
Abbiamo visto che per un problema del genere le equazioni di Einstein-
68

Appendice A. Esempi svolti
Maxwell sono, nel vuoto,
Gµν = 2(
Fµλ Fνλ − 1
4gµν Fρσ Fρσ
), (A.2.6)
∇µFµν = 0, (A.2.7)
che ammettono soluzione data dalle (4.1.5), (4.1.6). Inoltre la particella risentedella forza di Lorentz
mDuµ
dλ= qFµνuν . (A.2.8)
Definendo la carica di Noether CN
CN = −ξµ(muµ − qAµ) (A.2.9)
si ha chedCN
dλ= 0, (A.2.10)
in virtù delle (A.2.2), (A.2.8) e delle proprietà di simmetria dei vettori di Killing.Il quadripotenziale del campo elettromagnetico di RN è dato da
A =Qr
dt . (A.2.11)
Non è difficile vedere che, per k = ∂∂t ,
Lk Aµ =∂Aµ
∂t= 0. (A.2.12)
Dall’ultima relazione si ha che la carica di Noether, associata a k, è data da
CN = m(
1− 2Mr
+Q2
r2
)dtdτ
+qQr
, (A.2.13)
mentre, lontano dal buco nero, la stessa relazione dà
CN = mε . (A.2.14)
Per cui risulta che (1− 2M
r+
Q2
r
)dtdτ
= ε− qm
Qr
. (A.2.15)
69

Appendice A. Esempi svolti
Partendo, ora, dalla metrica (4.1.5) si ha che per un moto puramente radiale
ds2 = −dτ2 = −(
1− 2Mr
+Q2
r2
)dt2 +
(1− 2M
r+
Q2
r2
)−1dr2 . (A.2.16)
Ponendo ora r = r(t) si ha, dopo semplici passaggi,
r2 =
(1− 2M
r+
Q2
r
)2[1−
(1− 2M
r+
Q2
r
)(ε− qQ
mr
)−2]. (A.2.17)
Effettuando ora il cambio di variabili
drdt
=drdτ
dτ
dt(A.2.18)
si trova (drdτ
)2
=
(ε− qQ
mr
)2
−(
1− 2Mr
+Q2
r2
), (A.2.19)
che, rimescolata, dà(drdτ
)2
= (ε2 − 1) +(
1− εqQ
mM
)2M
r+
(q2
r2 − 1)
Q2
r2 . (A.2.20)
70

Bibliografia
[1] S.W. Hawking e G.F.R. Ellis: The large scale structure of space-time,Cambridge University Press, 117-124, 256-289,308-323;
[2] P.K. Townsend: Black Holes lecture notes, DAMPT, University of Cambridge,11-90;
[3] L.D. Landau e E.M. Lifschitz: Fisica Teorica, Vol.2, Teoria dei campi, EditoriRiuniti university press, 296-429;
[4] T.Ortìn: Gravity and strings, Cambridge University Press, 187- 212;
[5] S.Weinberg: Gravitation and cosmology: principles and applications of thegeneral theory of relativity, John Wiley and Sons, 1-248;
[6] E. Poisson: A Relativist’s Toolkit: The Mathematics of Black-Hole Mechanics,Cambridge University Press, 163-205;
[7] V. Barone: Relatività. Principi e applicazioni, Bollati e Boringhieri, 463-509 ;
[8] R.M. Wald: General Relativity, The University of Chicago Press, 298-329,437-444;
[9] H. Goldstein, C. Poole, J. Safko: Meccanica classica, Zanichelli, 263-314 .
71