Tomasicchio - Appunti Su Meccanica Del Moto Ondoso
87
1 UNIVERSITÀ DEL SALENTO Dipartimento di Ingegneria dell’Innovazione Corso di Laurea in Ingegneria Civile Appunti dal corso di COSTRUZIONI PORTUALI E COSTIERE Prof. Ing. G. R. Tomasicchio bozza 2009 LA MECCANICA DEL MOTO ONDOSO
description
tomasicchio
Transcript of Tomasicchio - Appunti Su Meccanica Del Moto Ondoso

1
UNIVERSITÀ DEL SALENTO
Dipartimento di Ingegneria dell’Innovazione
Corso di Laurea in Ingegneria Civile
Appunti dal corso di
COSTRUZIONI PORTUALI E COSTIERE Prof. Ing. G. R. Tomasicchio
bozza
2009
LA MECCANICA DEL MOTO ONDOSO

2
LA MECCANICA DEL MOTO ONDOSO
Si affronta il problema della descrizione delle caratteristiche del moto
ondoso. In particolare, ci si occupa della descrizione dell’andamento della
superficie libera, della cinematica, della variazione della pressione e della
traiettoria di una particella d’acqua al passaggio di un’onda.
Definizioni di base
altezza, H;
ampiezza: a=H/2; numero d’onda;
lunghezza, L;
profondità , h – intesa come distanza tra il fondo e il livello medio mare;
periodo T - il tempo che intercorre tra il passaggio di due creste (o due
cavi) in un punto definito;
ripidità, H/L;

3
la fase (o l’angolo di fase) è zero al passaggio della cresta dell’onda e
quindi cresce sino a 360° in un periodo; dunque, la fase in
corrispondenza del cavo d’onda è 180°;
fronte d’onda è il luogo dei punti di fase costante. La direzione di
propagazione del moto ondoso viene descritto dalle ortogonali d’onda che
sono traiettorie ortogonali ai fronti d’onda (Fig. 3 da pag 15 Svendsen);
numero d’onda: k = 2π/L;
frequenza angolare: ω = 2π/T;
celerità dell’onda: c = L/T.
Il numero d’onda, k, rappresenta la variazione della fase nell’unità di percorso
dell’onda, mentre la frequenza angolare, ω, rappresenta la variazione della
fase nell’unità di tempo.
Classificazione delle onde
In natura si presentano differenti tipi di onde che è possibile distinguere in
base al valore assunto dal periodo, T.

4
La Figura, originariamente disegnata da Munk nel 1951, mostra i tipi
predominanti di onde nei mari, i loro nomi, riferiti al loro periodo, e gli agenti
esterni che le generano.
Riassumendo, possiamo distinguere tre tipi principali di onde (Tabella I).
Tabella I.
Denominazione Periodo Esempi
Onde di gravità di breve periodo
(short waves)
T < 30 s Onde di vento (wind waves), onde di mare lungo (swells)
Onde di gravità di lungo periodo
(long waves)
30 s < T < alcune ore Onde generate dal terremoto (tsunami), onde di piena nei corsi d’acqua
Maree T > alcune ore Azione gravitazionale della luna e del sole, oscillazioni su vaste superfici idriche causate dal vento (laguna di Venezia)
A questa prima classificazione segue quella basata sul valore assunto dal
rapporto L/h ove L è la lunghezza d’onda e h è il tirante idrico. Se L/h » 1, ci si
riferisce alle long waves; se L/h non è assai maggiore di 1 ma L/h=O(1), si
parla di short waves.
Le long waves sono descritte mediante l’ipotesi di corrente gradualmente
variata per mezzo della quale si descrivono le correnti a pelo libero in moto
permanente. Come noto, sotto tale ipotesi la componente verticale
dell’accelerazione è trascurabile e la distribuzione della pressione lungo la
verticale è pressoché idrostatica. I gradienti di pressione che accelerano o
decelerano la componente orizzontale del moto tendono a determinare un
profilo uniforme lungo la verticale della componente orizzontale della velocità.
Ne deriva che la coordinata verticale può essere eliminata nella trattazione
delle onde lunghe. Le short waves, viceversa, sono assimilabili a correnti
rapidamente variabili. La Tabella II riassume le principali differenze
caratterizzanti le long e le short waves.
Tabella II. Caratteristiche del moto Moto gradualmente variato
(onda lunga)
Moto rapidamente variabile
(onda di breve periodo) Curvatura delle linee
di corrente Debole Forte
Componente verticale Trascurabile Significativa

5
dell’accelerazione Distribuzione della
pressione Pressoché idrostatica Sensibilmente non idrostatica
Profilo di velocità Quasi uniforme (escluso lo strato limite) Sensibilmente non uniforme
Resistenza al fondo Significativa Trascurabile
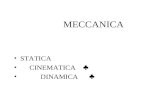
Profili di pressione (p) e di velocità (u) per onde di lungo periodo (a) e di breve periodo (b)
Nel seguito ci si riferisce alle onde gravitazionali di superficie di breve
periodo, ovvero a quelle onde caratterizzate da T < 30 s. In particolare,
seguiremo queste onde nel corso della loro propagazione dall’area di
generazione sino a riva.
Equazione fondamentale del moto a potenziale
Nel seguito si considera il moto bidimensionale nel piano xoz, con x coincidente
con la direzione di propagazione dell’onda. Come noto, l’equazione indefinita di
continuità per fluido incomprimibile è:
0
z
w
x
u (1)
Nell’ipotesi di fluido perfetto (componenti tangenziali degli sforzi ovunque nulle
e componenti normali uguali fra loro), il moto del fluido è descritto mediante la
nota equazione di Eulero
pgradAF )( (2)

6
in cui ρ è la densità del fluido, il vettore F è la forza di massa riferita all’unità
di massa, il vettore A è l’accelerazione, p è la pressione. Le componenti dell’eq.
(2) sugli assi x e z sono, rispettivamente
z
ww
x
w
t
w1
e z
uw
x
u
t
u
1
uDt
Dw
x
pF
uDt
Du
x
pF
z
x
(3)
Si ammette senz’altro che il fluido considerato sia pesante e soggetto alla sola
forza di massa che deriva dal campo gravitazionale. In tal caso si ha:
F = - g grad z e quindi la componente lungo la verticale Fz = - g = zgz /)( .
La ipotesi di irrotazionalità del moto ammette poi l’esistenza di un potenziale di
velocità, Φ. Il potenziale di velocità è caratterizzato dal fatto che la sua derivata
lungo una direzione corrisponde alla componente della velocità nella medesima
direzione. Quindi, le componenti della velocità orizzontale, u, e verticale, w,
sono così espresse:
zw
xu
e (4)
L’irrotazionalità del moto comporta l’uguaglianza x
w
z
u
che, sostituita
nell’equazione di continuità (1), determina la nota equazione di Laplace
02
2
2
2
zx (5)
o anche
02 (5a)
Essa deve risultare verificata nel dominio – h ≤ z ≤ η, -∞ < x < ∞, con η livello
della superficie d’acqua rispetto al livello medio mare calmo. Per la definizione
di potenziale della velocità, si ha tzt
w
txt
u
22
e . Le equazioni
del moto di Eulero (3) possono riscriversi nella seguente forma

7
z
ww
z
u
t
1)(
e z
w x
u
t
1
2
2
uzx
p
z
gz
uu
xx
p
(6)
Osservato che
z
w
z
ww
x
u
x
uu
22
2
1 e
2
1 (7)
le (6) possono riscriversi in forma compatta
0
2
1
e 02
1
22
22
gzp
wutz
pwu
tx
(8)
integrando si ottiene
),(
2
1
e ),(2
1
222
122
tzCgzp
wut
txCp
wut
(9)
Sottraendo la prima dalla seconda si ha ),(),( 12 txCtzCgz . Poiché g non è
funzione di x, C2 risulta funzione solo del tempo e quindi gztCC )(21 . Le (9)
si riducono alla sola equazione
)(2
12
22 tCgzp
wut
(10)
)(2 tC è una costante nell’intero dominio dello spazio per un assegnato istante t.
La scelta di )(2 tC è evidentemente arbitraria e non interviene a modificare la
soluzione. Il valore di )(2 tC può quindi essere assunto pari a zero. L’eq. (10) si
riduce alla:
(11)
02
1 22
gzp
wut

8
detta equazione del moto vario a potenziale.
Per moto permanente risulta 0t
e l’eq. (10) si riduce all’equazione di
Bernoulli.
Le condizioni al contorno
La equazione del moto vario a potenziale è una equazione alle differenze parziali
del secondo ordine. La sua soluzione richiede la definizione delle condizioni al
contorno. Queste, per il caso di un’onda bidimensionale su di un fondo rigido
ed impermeabile in assenza di correnti esterne, sono di seguito specificate:
0)(
hzzw per z = -h KBBC
z
z xxtzdt
dw )( per z = η (x,t) KFSBC
p = 0 ↔ 02
1)(
22
gzxt z per z = η (x,t) DFSBC
N.B. nella figura l’asse verticale è denominato y
A queste condizioni va aggiunta quella che deriva dal considerare un’onda
periodica e progressiva di forma costante. Questa condizione è detta di
periodicità e esprime il fatto che lungo la direzione di propagazione dell’onda,
ad un certo istante, quanto osservato in un assegnato punto è identico a

9
quanto si verifica, allo stesso istante, in un punto ad una distanza multipla
della lunghezza d’onda. Quanto detto si riassume nella relazione
x
tzLx
x
tzx
),,(
),,( (12)
con x coincidente con la direzione di propagazione dell’onda ed L lunghezza
d’onda.
Teoria dell’onda progressiva di piccola ampiezza (a/h <<1, a/L <<1)
La soluzione dell’eq. (11) per le assegnate condizioni al contorno genera un
problema non lineare. Per semplificare il procedimento, si osserva che le onde
di mare reali hanno altezze piccole rispetto alla loro lunghezza. Questa
considerazione consente di risolvere l’eq. (11) trascurandone i termini non
lineari. Pertanto, la teoria che si ottiene è detta dell’onda progressiva di piccola
ampiezza (anche teoria lineare, o di Airy, o di Stokes al 1° ordine).
I termini zz zt / e / espansi in serie di Taylor intorno a z = 0
(al l.m.m) hanno le seguenti espressioni
............2
1 2
02
2
00
zzzz tztztt (13a)
............2
1 2
02
2
00
zzzz zzzzzz (14a)
Trascurando i termini al secondo ordine, si ha
0
zz tt (13a)
0
zz zz (14a)
Riscrivendo le equazioni che descrivono il fenomeno per ipotesi di linearità, si
ha:

10
02
2
2
2
zx, - h ≤ z ≤ η, -∞ < x < ∞ (15)
0
hzz KBBC (16)
zzt e per la (14a)
0
zzt
KFSBC (17)
00
g
t z DFSBC (18)
Il termine cinetico nella (18) è trascurabile in quanto u e w sono piccoli a causa
dell’ ipotizzato modesto valore di eta. In tal modo linearizzo tutte le equazioni.
N.B. nella figura l’asse verticale è denominato y
Eliminando η dalle (17) e (18) si ottiene una ulteriore condizione al contorno
002
2
zzz
gt
(18a)

11
Relazione di dispersione lineare (per onda progressiva periodica)
Si assuma l’espressione tzxtkxzfctxkzf ,,)sin()()(sin)( .
Sostituendo l’espressione di Φ nell’eq. di Laplace si ottiene
02
2
2
2
zx 02
2
2 fk
dz
d f (19)
(eq. della corda vibrante) che ha la seguente soluzione generale:
kzkz BeAef con A e B costanti. Si ha quindi la relazione
)sin( tkxBeAe kzkz che sostituita nella espressioni delle
condizioni al contorno (16) e (18a) da
0 e 0 22 BgkAgkBeAe khkh (20)
Per ottenere soluzioni con A e B diversi da zero, deve risultare soddisfatta la
seguente condizione
0
22
h
gkgk
ee khk
(21)
(soluzione di un sistema di equazioni lineari in A e B secondo Gauss)
Il determinante risulta dato dall’espressione khgkee
eegk
khkh
khkhtanh2
Ricordato che ck , si ha
L
hgLkh
k
gc
2tanh
2tanh (21a)
che per c=L/T diventa L
hgTc
2tanh
2 , o anche
(22)
Dalla (21a) si osserva che la celerità con cui si propaga l’onda è funzione della
propria lunghezza (o del periodo) e della profondità.
L
hgTL
2tanh
2
2

12
Riscrivendo la prima delle (20) nella forma 2
D khkh BeAe , il potenziale di
velocità Φ assume la seguente espressione
)sin()(cosh)sin(2
1 )()( tkxzhkDtkxeeD zhkzhk (22a)
Utilizzando la condizione al contorno DFSBC (18), 00
g
t z, si
ottiene
)cos()cos()cosh(1
0
kxtakxtkhDgtg z
Ma per onda sinusoidale progressiva risulta )cos( kxta . La
costante D è allora
khk
a
kh
agD
sinh
1
cosh
1
Sostituendo nella (22a), l’espressione finale del potenziale di un’onda
progressiva periodica di piccola ampiezza (lineare) è la seguente
(23)
In sintesi, la determinazione dell’equazione ha richiesto le seguenti ipotesi:
Fluido non viscoso e di densità costante (incompressibile) nel campo della
gravità;
Assenza di tensione superficiale;
Fondo rigido ed impermeabile;
Onda periodica, bidimensionale che si propaga senza mutare la propria
forma;
Assenza di correnti esterne oltre a quelle indotte dall’onda;
Onde di piccola ampiezza.
L’andamento della superficie libera, , rappresenta la proiezione su di un asse di un vettore di lunghezza a che forma
con l’asse l’angolo kxt . L’andamento della superficie libera può anche essere espresso mediante la relazione
equivalente tixAkxtia exp)()(exp
)sin(cosh
)(coshtkx
kh
zhkag

13
Componenti della velocità
)( coscosh
)(cosh
2
1 1 tkxkh
zhkkHgu
(24a)
e
)( sincosh
)(sinh
2
1 1 tkxkh
zhkkHgw
(24b)
omponenti della accelerazione
)( sincosh
)(cosh
2
1tkx
kh
zhkHkg
t
uax
(25a)
)( coscosh
)(sinh
2
1tkx
kh
zhkHkg
t
waw
(25b)
Movimenti della particella di fluido
Componente orizzontale, )( sinsinh
)(cosh
2tkx
kh
zhkg
H
(26a)
Componente verticale, )( cossinh
)(sinh
2tkx
kh
zhkg
H
(26b)

14
Campo della pressione
)( coscosh
)(cosh
2tkx
kh
zhkHggzp
(27)
pressione della risposta di fattore cosh
)(coshcon
kh
zhk e
- gz pressione idrostatica.
Il fattore di risposta di pressione è inferiore ad 1 per tutti i punti al di sotto del
l.m.m.
Dalla (27) si osserva che la pressione risulta in fase con la superficie libera e
che ha ampiezza decrescente verso il fondo.

15
La profondità relativa
Già a proposito delle onde di lungo e breve periodo, si è discusso il ruolo del
parametro h/L, la cosiddetta profondità relativa: il suo valore è importante per
stabilire l’effetto del fondo sull’onda di superficie. In particolare, il valore della
dispersione di frequenza permette di definire le modalità secondo le quali
l’onda si propaga. A seconda del valore di h/L si individuano le condizioni in
Tabella IV.
Tabella IV. Acque basse
“shallow water” 0 < h/L < 1/20 kh « π/10 h/gT2 < 0.0025
Acque intermedie “transitional water”
1/20 < h/L < ½ kh = O(1) 0.0025 < h/gT2 < 0.08
Acque profonde “deep water”
½ < h/L < ∞ kh » π h/gT2 > 0.08
Per effetto dei valori asintotici assunti dalle funzioni trigonometriche in
corrispondenza delle condizioni di acque basse e di acque profonde, sono
possibili alcune semplificazioni nelle espressioni delle grandezze caratteristiche
dell’onda. La Tabella V riassume i valori asintotici delle funzioni
trigonometriche
Tabella V. Valori asintotici delle funzioni trigonometriche
Asintoti
Funzione Acque basse Acque profonde
sinh kh Kh 2
khe
cosh kh 1 2
khe
tanh kh Kh 1
Allo scopo di illustrare le semplificazioni derivanti dall’uso degli asintoti
anziché delle funzioni iperboliche, si consideri l’espressione della celerità
L
hgTc
2tanh
2 (28)
Per acque basse, tanh kh=kh e quindi si può scrivere ghc 2 . Per acque
profonde, tanh kh=1 e si può scrivere oo kgc /2 , ove il pedice o viene
comunemente assunto ad indicare la condizione d’acqua profonda.

16

17
Dalla relazione ghc 2 per acque basse, si rileva che le onde lineari in acque
basse si propagano con una celerità funzione della sola profondità,
indipendentemente dal periodo. In tal caso, l’onda si dice non dispersiva
(dispersione di frequenza nulla) e si assiste al fenomeno per cui onde con
differente periodo non si raggiungono e quindi non si hanno i gruppi d’onda.
TAB.2.2 – Tabella riassuntiva delle principali grandezze d’onda
PROFONDITÀ
RELATIVA
ACQUE BASSE
25
1
L
h
ACQUE INTERMEDIE
2
1
25
1
L
h
ACQUE
PROFONDE
2
1
L
h
Superficie libera cos2
22cos
2
H
L
t
L
xH
Celerità hgT
Lc
L
hgT
T
Lc
2tanh
2
20
gT
T
Lc
Lunghezza cThgTL
L
hgTL
2tanh
2
2
TcgT
L 0
2
0 2
Componenti
velocità
Orizzontale cos2 h
gHu )( cos
cosh
)(cosh
2
1 1 tkxkh
zhkkHgu
cos2
L
z
eT
Hu
Verticale sin1
2
h
zHw )( sin
cosh
)(sinh
2
1 1 tkxkh
zhkkHgw
sin2
L
z
eT
Hw
Componenti
accelerazione
orizzontale sin
2 h
gHax )( sin
cosh
)(cosh
2
1tkx
kh
zhkHkg
t
uax
sin222
L
z
x eT
Ha
verticale cos12
2
h
z
THay
)( coscosh
)(sinh
2
1tkx
kh
zhkHkg
t
waw
cos222
L
z
y eT
Ha
Coordinate
posizione
particella
orizzontale
sin4 h
gHT
sin)/2sinh(
/2cosh
2 Lh
LhzH
sin2
2
L
z
eH
verticale cos12
h
zH
cos)/2sinh(
/2sinh
2 Lh
LhzH
cos2
2
L
h
eH
Pressione )( zgP
gzLh
LhzgP
)/2cosh(
/2coshgzegP L
z
2

18
E’ interessante vedere la rappresentazione delle traiettorie delle particelle di
fluido per i diversi valori della profondità relativa. Questa è riportata in questa
figura.
Si osserva che in acque profonde, il moto della particella è circolare con raggio
decrescente verso il fondo e nullo per z= -L/2.
Per acque basse, la traiettoria percorsa dalla particella d’acqua è un ellisse,
con asse orizzontale costante e asse verticale che diminuisce verso il fondo,
sino ad annullarsi in prossimità dello stesso, dando luogo al fatto che in
prossimità del fondo la particella subisce la sola traslazione orizzontale.

19

20

21
L’onda stazionaria
Nello sviluppare la teoria dell’onda di piccola ampiezza, si sono linearizzate le
condizioni al contorno per le quali si integra l’equazione che governa il
fenomeno. Come risultato abbiamo che la descrizione matematica non simula
del tutto correttamente la realtà, ma ha guadagnato la possibilità di costruire
nuove soluzioni da soluzioni già ottenute mediante il principio di
sovrapposizione. Questo principio è sempre applicabile nei problemi lineari.
Si voglia descrivere la configurazione della superficie ηT prodotta da più onde
progressive. L’ipotesi di linearità permette di esprimere il potenziale di velocità
ΦT come somma dei potenziali di onde distinte
NnT ...............321 (29)
Per la superficie libera, si può scrivere
NnT ...............321 (30)
Anche per le componenti di velocità delle particelle, per le pressioni e per le
accelerazioni risulta valido il principio di sovrapposizione.
Si esamina ora il caso particolare in cui un’onda interagisce con una parete
impermeabile verticale. In tal caso l’onda incidente 1, per effetto della
riflessione, determina una onda riflessa 2 di pari ampiezza e periodo, ma
direzione opposta (Horikawa 20).
)sin(sinh
)(cosh )cos( 11 tkx
kh
zhk
k
atkxa
(37)
)sin(sinh
)(cosh )cos( 22 tkx
kh
zhk
k
atkxa
(38)
La sovrapposizione determina un’onda con andamento della superficie libera e
potenziale descritti dalle seguenti relazioni
tkxkh
zhk
kHtkxH sincos
sinh
)(cosh coscos 2121
(39)
un’onda quindi non progressiva che viene detta stazionaria o clapotis, che ha
altezza pari al doppio della altezza della singola onda componente.
L’espressione di η è il prodotto di due termini, uno indipendente da x e l’altro
indipendente da t. Quindi vi sono tempi in cui η=0 per qualsiasi valore di x
e vi sono valori delle ascisse x per i quali η=0 ad ogni istante. In particolare,

22
per 0cos kx ovvero per 2/3 ,2/ kx e così via si ha η=0. Questi punti
sono detti nodi e sono indicati nella figura.

23

24
L’onda stazionaria ha velocità le cui componenti orizzontale e verticale
sono,rispettivamente
tkxkh
zhkH
xu sinsin
sinh
)(cosh
(40)
e
tkxkh
zhkH
zw sincos
sinh
)(sinh
(41)
I valori estremi di u e w si ottengono in corrispondenza dei nodi e degli
antinodi come illustrato in figura.
Infine, è possibile determinare l’andamento delle linee di corrente che viene
espresso mediante la relazione kxzhkdx
dz
u
wcot)(tanh

25
I gruppi d’onda (wave groups)
Due treni d’onde di pari altezza e periodi leggermente differenti che si
propagano nella stessa direzione generano una serie di onde le cui ampiezze
variano gradualmente tra zero ed il valore massimo H.
L’andamento, η, della superficie libera può essere decritto dalla relazione
)cos(2
)cos(2 221121 txk
Htxk
H (42)
Onda di modulazione

26
ove
2
2
2
2
22
11
kkk
kkk
(43)
frequenza angolare.
Usando le relazioni goniometriche, η può essere espresso come
tk
xktkxH
txkktxkkH
2
1coscos
2
1cos
2
1cos 21212121
(44)
cck g
Risulta quindi che l’andamento η, composto da forme d’onda propagantisi con
celerità kc / , risulta inviluppato in una forma d’onda che si propaga con
celerità kcg / detta celerità di gruppo (o dell’inviluppo). L’energia di un
treno d’onde si propaga con la celerità di gruppo.
La figura mostra che il gruppo d’onde consiste di una serie di onde singole le
cui dimensioni crescono e poi decrescono. La curva a tratti (----) esiste solo
concettualmente e rappresenta i limiti entro cui può variare la che è
fisicamente reale. Si ottiene una celerità di gruppo relativa a un gruppo d’onda
2H
2H

27
di lunghezza k
Lg
2; se 0k , gL (quindi un treno d’onda di altezza
costante). Per dkdcg / , il valore della derivata dkd / può essere
determinato mediante la relazione di dispersione lineare khgk tanh2 .
Si può scrivere khhgkhkhgkdk
d 2sec tanh2 da cui
(45)
con n < 1.
Facendo proprio un commento del prof. Paolo Boccotti, si può dire che “la
celerità di gruppo assume un ruolo cruciale nella meccanica delle onde
generate dal vento. Infatti, le onde reali tendono a raggrupparsi
spontaneamente dando vita a gruppi composti da 3-4 onde, che avanzano con
celerità gc (questo da luogo al detto “ogni sette onde, una grande”). In quel
caso, le onde che nascono in coda al gruppo crescono fino a raggiungere un
massimo di altezza quando arrivano ad occupare la posizione centrale
dell’inviluppo, e poi vanno a morire in testa al gruppo. In pratica, poiché c >
gc le onde singole viaggiano attraverso il gruppo. Tale fenomeno avviene
proprio perché la celerità del gruppo, cioè la velocità di avanzamento
dell’inviluppo, è più piccola della celerità di ciascuna singola onda
componente.“
La (45) per acque profonde si riduce alla ccg 2
1 . Per acque basse si ha
ccg e quindi, come già osservato, si assiste al fenomeno per cui onde con
differente periodo non si raggiungono e quindi non si hanno i gruppi d’onda.
cn
kh
khc
khgk
khhgkhkhg
dk
dcg
2sinh
21
2tanh2
sec tanh 2

28
L’energia dell’onda
L’energia posseduta dalla massa d’acqua è somma di una componente
cinetica e di una potenziale.
L’energia cinetica è dovuta alla velocità di cui sono animate le particelle di
fluido; l’energia cinetica associata ad una piccola porzione di fluido avente
massa dm è
22
2222 wudxdz
wudmKd E
(46)
L’energia cinetica media per unità di superficie viene poi determinata
integrando EKd lungo la verticale e mediando lungo la lunghezza d’onda
dzdxwu
LK
Lx
x hE 2
1 22
(47)
Dalle espressioni delle componenti della velocità determinate per il caso di
onda regolare progressiva, si ha
dzdxtkxzhktkxzhkkh
gHk
LK
Lx
x h
E
22222
sinsinhcoscoshcosh
1
22
che, con le note relazioni goniometriche, si riscrive
dzdxtkxzhkkh
gHk
LK
Lx
x h
E
2cos2cosh
2
1
cosh
1
22
2
(48)
Integrando e semplificando si ottiene
2
16
1gHKE (J/m2) (49)

29
L’espressione dell’energia potenziale per unità di superficie, EP , si
determina considerandola dovuta alla posizione di porzioni di fluido al di sopra
del cavo d’onda o al di sotto della cresta d’onda. Adottando lo schema in figura
(ove si considera la porzione di fluido tra cresta e livello medio dal mare) si ha
2
16
1gHPE .
L’energia totale per unità di superficie, E, è
2
8
1gHPKE EE (J/m2) (50)
L’energia totale per onda e per unità di larghezza è LgHE 2
8
1 .
Si osserva che EP e EK non dipendono dalla profondità, h, o dalla lunghezza
d’onda, L, ma, solo dalla altezza d’onda.

30
Il flusso medio d’energia o potenza dell’onda
Una proprietà fondamentale delle onde è rappresentata dalla loro capacità di
trasmettere energia da un porzione d’acqua ad un’altra.
Si consideri un piano perpendicolare alla direzione di propagazione dell’onda e
di profondità unitaria. Il flusso medio di energia che attraversa tale superficie
nell’unità di tempo viene indicato con P. Esso rappresenta il lavoro compiuto
dall’onda nell’unità di tempo, cioè la sua potenza, e può scriversi
dzx
pdzx
ppudzPh h h
0
(51)
Utilizzando le espressioni della pressione p e di x determinate per il caso di
onda progressiva regolare di piccola ampiezza, integrando e poi mediando
rispetto al periodo si ottiene l’espressione del flusso medio d’energia che viene
trasmesso dall’onda nell’unità di tempo attraverso un piano verticale di
larghezza unitaria
gg
T
cgHcgagcnadtPT
P 222
0 8
1
2
1
2
1
1 (Watt/m) (52)
e quindi, EncEcP g . Essa rappresenta la potenza per unità di sviluppo
del fronte dell’onda cresta.
Teoria dell’onda di ampiezza finita (onda non lineare)

31
La ripidità, H/L, delle onde che si verificano in natura raggiunge un valore
massimo compreso tra 0,05 e 0,08. Il che potrebbe indurre a pensare che la
teoria lineare sia in grado di ben descrivere l’onda in tutte le sue possibili
condizioni. In realtà non è così e sono state sviluppate teorie che non
trascurano i termini non lineari presenti nelle condizioni al contorno. Queste
teorie sono dette delle onde di ampiezza finita in quanto l’altezza d’onda non è
più considerata infinitesima, ma finita se pur sempre piccola. Esse sono anche
dette teorie non lineari dell’onda.
Nel seguito si descrivono le due teorie esistenti. La prima è detta teoria di
Stokes di ordine superiore (ha la soluzione lineare o di Airy come prima
approssimazione). La seconda è detta teoria dell’onda lunga (long wave theory)
e si adotta quando la lunghezza d’onda è assai maggiore della profondità. Per
entrambe, le non linearità dell’onda introducono solo delle piccole correzioni
alla soluzione che si può ottenere trascurando le non linearità.
La Figura pone a confronto l’andamento di un’onda descritto con la teoria
lineare e l’andamento reale della superficie d’onda. Si osserva che, l’onda reale
ha una distanza della cresta (del cavo) dal medio mare maggiore (minore) che
per l’onda lineare. Un altro effetto importante dell’adozione della teoria non
lineare è che la traiettoria della particella non è più chiusa e si determina un
trasporto di massa

32

33
Fluorescent particle photographed as a wave train propagated through. Wave orbits are not closed – mass transport.

34
Teoria di Stokes di ordine superiore (onda di breve periodo)
La teoria di Stokes si adotta quando la lunghezza d’onda e la profondità sono
tali che L/h=O(1). La teoria dell’onda di Stokes di piccola ampiezza (o lineare, o
di Airy) già introdotta si basa sull’ipotesi che l’altezza d’onda è talmente piccola
che tutti i termini O(H2/L2) siano trascurabili rispetto ai termini O(H/L). A
seguito di questa ipotesi è stato possibile linearizzare le condizioni al contorno
e quindi risolvere in forma analitica esatta le equazioni del moto e di
continuità.
La teoria di Stokes di ordine superiore al primo assume per il potenziale di
velocità, Φ, e per l’andamento della superficie libera, η, le seguenti espressioni
.......21 (53)
..........21 (54)
ove gli apici (1) e (2) indicano il termine lineare e quello delle non linearità,
rispettivamente. Nella teoria di Stokes ciascuna grandezza caratteristica del
moto ondoso (potenziale, elevazione d’onda, pressione, velocità, etc…) viene
espansa in serie e si assume per ciascun termine della serie la relazione
term(n+1)=O(H/L * term(n)). Pertanto, nell’approssimazione al primo ordine (Φ(1),
η(1)) sono trascurati tutti i termini tranne quelli O(H/L). Invece, la teoria non
lineare approssimata al secondo ordine considera anche tutti i termini O(H/L *
termine della soluzione al primo ordine). Così facendo, le equazioni
approssimano l’effetto dei termini non lineari e possono essere risolte in forma
esatta. Il metodo descritto è detto delle piccole perturbazioni ed è utilizzato
anche in altre branche della scienza.
Per esempio, con riferimento ad η, il termine lineare ha espressione cos2
H e
tkx è la fase. Il termine al secondo ordine è proporzionale ad
2cos142
1cos
2
22
2
HH
e altri termini simili con 2sin . Al secondo
ordine, l’andamento, η, della superficie libera è
2coscos )2()1( (55)
O(H2/L2) si intende dire termine di ordine H2/L2.

35
ove 2
)1( H e
3
2)2(
)(sinh
)2cosh2( )(cosh
4
1
kh
khkhkH
(56)
Il profilo dell’onda di Stokes al secondo ordine, rispetto all’onda lineare
(sinusoidale), presenta delle creste più strette ed alte e dei cavi più larghi e
piatti.
I profili d’onda misurati in campo su acque profonde (L/h=O(1)) risultano ben
approssimati dalla teoria di Stokes al secondo o al terzo ordine (lo sviluppo
analitico della teoria di Stokes è stata estesa al 5° ordine). In acque più basse
l’approssimazione è insufficiente. Il rapporto tra 2 ed 1 fornisce
un’indicazione sul tipo di approssimazione da adottarsi. Per acque profonde
( kh ), si ha
L
HHk
222
1)1(
)2(
(57)
che risulta sempre piccolo per l’intervento del frangimento che limita il valore
di H/L. In acque basse ( 10/kh )si ha
3
22
3
2
23
)1(
)2(10
32
3)
2(
4
3
h
HL
h
HLHkkh
(58)
ove il parametro adimensionale 3
2
h
HLè detto numero di Ursell, UR.
Se si desidera che )1()2( 2.0 , deve risultare 203
2
h
HL. In altri termini, per
valori elevati di UR (20), la teoria di Stokes non è valida.

36

37

38
La teoria dell’onda lunga (L/h>>1)
In molti casi la lunghezza dell’onda è assai maggiore della profondità e l’altezza
d’onda rappresenta una frazione della profondità. In tal caso, il numero di
Ursell, UR ≡ HL2/h3, assume valori così elevati da rendere inapplicabile la
teoria di Stokes.
Per la formulazione della teoria dell’onda lunga si assume ancora un moto a
potenziale per effetto dell’ipotesi che la lunghezza d’onda non sia talmente
elevata da sviluppare uno strato limite troppo ampio (nello strato limite si
sviluppa vorticità e quindi decade l’ipotesi di irrotazionalità). Vanno quindi
considerate le stesse condizioni già adottate per la teoria di Stokes (Laplace e le
condizioni al contorno). La condizione nuova è che h/L << 1. Questa si
aggiunge alla condizione che l’altezza d’onda sia piccola affinché i termini non
lineari siano piccoli. Consideriamo i due parametri1:
hH / e Lh / (58a)
essendo e adimensionali e rappresentativi, rispettivamente, della non
linearità e della dispersione di frequenza.
Si osserva che risulta UR = /2.
Sono state sviluppate differenti teorie nell’ipotesi di onda lunga. La teoria da
utilizzare si sceglie sulla base del valore assunto da UR.
Se UR=O(1), la teoria dell’onda lunga si dice cnoidale (che è non lineare
anche al primo ordine d’approssimazione). Per UR=O(1), sono state
sviluppate le equazioni di Boussinesq e di Korteweg-de Vries.
Se UR << 1, l’ampiezza dell’onda e le non linearità sono molto piccoli; si
adottano le equazioni lineari dell’onda lunga.
Se UR >> 1, le non linearità predominano sul fenomeno di dispersione di
frequenza e la propagazione del moto ondoso ondoso viene descritta
mediante le cosiddette non linear shallow water equations.
1 essendo = H/h e = h/L parametri adimensionali rappresentativi, rispettivamente, della non linearità e della dispersione di frequenza, con a = ampiezza dell’onda e L = lunghezza dell’onda, risulta Ur = /2.

39
La Tabella VII, indica la teoria d’onda lunga più opportuna per differenti valori
delle predette normalizzazioni di H, L ed h ed i valori corrispondenti di UR.
Tabella VII.
L
h
h
H
UR « 1
Equazioni lineari (linear equations)
L
h
h
H
UR » 1
Equazioni non lineari per acque basse (non linear shallow water equations)
L
h
h
H
UR= O(1)
Onda cnoidale, equazioni di Boussinesq, equazioni di Korteweg - de Vries

40

41
Energia e flusso d’energia delle onde di ampiezza finita
Per onde sinusoidali si ha 222 8121 Ha .
Il contenuto d’energia (E) e il flusso di energia (P) di un’onda per unità di
superficie sono proporzionali ad 2 .
Si può osservare che all’aumentare delle non linearità il rapporto 22 / H
decresce.
Infatti, mentre per onde sinusoidali:
8
18
1
2
2
2
2
H
H
H
per onde non lineari a parità di 2 , H aumenta dunque 22 / H decresce.

42
Frangimento
La cresta di un’onda per assegnate lunghezza e profondità diviene sempre più
pronunciata al crescere dell’altezza. Si raggiunge una condizione limite quando
la superficie libera in corrispondenza della cresta non è più curva e presenta
una cuspide; Stokes ha mostrato che tale cuspide è caratterizzata da un
angolo fra le tangenti pari a 120°.
In tale condizione la velocità della particelle d’acqua in corrispondenza della
cresta risulta pari alla celerità dell’onda e si determina il valore massimo di
altezza d’onda, Hb, compatibile con gli assegnati valori di L ed h.
Diversi studi sono stati condotti allo scopo di determinare Hb in funzione di h
ed L. Miche (1944) determinò la seguente relazione valida per onde progressive
khL
H
o
b tanh14.0max
(59)
che per acque alte si riduce alla espressione 14.0max
o
b
L
H,
mentre per acque basse diventa 89.0max
b
bh
H.
Per onde stazionarie si hanno le seguenti relazioni
218.0max
o
bL
H e 37.1
max
b
bh
H (60)

43
Per onde che frangono per effetto della riduzione del fondale, si verificano
differenti tipo di frangenti. Iribarren e Nogales (1949) e Battjes (1974)
introducono il parametro di frangimento (o surf similarity parameter) il cui
valore caratterizza il tipo di frangimento dell’onda su di una scarpata. Il
parametro di frangimento è definito come
oL
H
tan (60)
ove indica la pendenza della scarpata rispetto all’orizzontale.
Nella figura seguente sono indicati i tipi di frangimento ed i corrispondenti
valori di . Quando in presenza di spiagge (dunque di strutture con pendenza
assai lieve), i tipi più comuni di frangimento sono del tipo spilling (a
defluimento) e del tipo plunging (a cascata).

44
spilling
plunging
= 1.5
plunging
= 3
collapsing
surging
= 5
= 0.2
= 0.5

45

46

47

48
Goda (2000) ha presentato la seguente relazione per la determinazione dell’indice di frangimento
bb hH /
17.0: 1115.1exp1/
3/4
00
Am
L
h
Lh
A
h
H b
bb
b (8.32)
L’uso della (8.32) è diffuso in Giappone; essa è riportata nel Rock Manual (CIRIA et al. 2007). Goda (2000) ha proposto anche la seguente relazione per la determinazione dell’indice di frangimento per l’altezza d’onda significativa, 3/1H
3/4
00
,3/1 111)(
5.1exp1/
12.0m
L
h
Lhh
H incipientb
bincipientb
b (8.33)
Sono state proposte altre numerose formule per la determinazione dell’altezza d’onda al frangimento, bH .
La Tabella 8.2 (sul libro) riassume alcune tra le più diffuse. In essa si adottano i seguenti simboli:
bh = profondità al frangimento;
m = pendenza della struttura inclinata o della spiaggia;
bk = numero d’onda al frangimento;
bb hH / = indice di frangimento;
bL = lunghezza d’onda al frangimento.

49
Processi a cui è soggetta l’onda
L’onda viene generata in mare aperto dall’interazione del vento con la
superficie marina. Come si vedrà meglio nel seguito, quando il vento ha
soffiato per un tempo sufficientemente lungo su di una superficie liquida, si
determina il mare completamente sviluppato che esce dall’area di generazione
(swell). Le altezze d’onda, le lunghezze, i periodi, la lunghezza dei fronti e le
direzioni di propagazione sembrano tutte variare irregolarmente. In effetti,
queste grandezze seguono leggi statistiche (short term statistics). Ad esempio,
come si dirà meglio nel prosieguo, le altezze d’onda in acque profonde seguono,
con buon accordo, la distribuzione di Rayleigh.

50
Sino a quando l’onda è in acque profonde, la dissipazione d’energia dell’onda è
dovuta primariamente ai piccoli frangimenti indotti dall’azione del vento (eq.
59).
In acque più basse, quando h < ½ L, le onde cominciano a “sentire” il fondo.
Le onde diventano più lente, corte e ripide. Questo processo è detto di
shoaling.
Se il fronte d’onda forma un angolo con la isobata, la sua direzione di
propagazione muta e il processo assume il nome di rifrazione. La rifrazione è
dovuta essenzialmente al fatto che l’onda si propaga a maggiore velocità sulle
profondità maggiori che su quelle minori e quindi i fronti d’onda tendono a
divenire paralleli alle isobate.

51

52

53
Quando in presenza di un ostacolo l’onda subisce anche il fenomeno della
diffrazione che consiste nella propagazione delle onde anche a tergo di
ostacoli. Se l’ostacolo è relativamente grande rispetto alla lunghezza d’onda, si
può adottare un trattazione a potenziale.
La diffrazione si manifesta con all’incurvarsi dei fronti d’onda a causa della
presenza dell’ostacolo e alla propagazione dell’energia ondosa anche in zone
protette.

54
Se l’onda che interagisce con l’ostacolo non dissipa tutta la sua energia, si
assiste al fenomeno di riflessione.
Inoltre, se l’ostacolo è permeabile, si determina la trasmissione dell’energia
ondosa. Infine, se l’ostacolo è basso, si verifica il fenomeno della tracimazione
(overtopping).
Con il ridursi della profondità, l’onda diventa sempre più asimmetrica e tende
al frangimento. Poco prima del frangimento si può osservare la presenza di una
lieve depressione della superficie libera che viene detta set-down. Invece, nella
zona dei frangenti si osserva un lieve innalzamento della quota del l.m.m. che
è detto set-up.
Quando poi l’onda incontra la struttura o la spiaggia essa risale lungo di essa
e si verifica il cosiddetto run-up (risalita) a cui, nella fase di ridiscesa dell’onda
lungo la spiaggia o l’opera, segue il run-down (riflusso).

55
Nel seguito si discutono i fenomeni di shoaling e rifrazione assumendo l’ipotesi
che l’energia dell’onda non possa attraversare le ortogonali d’onda ma che la
sua direzione coincida in ogni punto con quella del vettore celerità.
Questa ipotesi necessita dei tre presupposti qui elencati:
che le onde siano del tipo swell (fuori della loro area di generazione);
che la curvatura dei fronti d’onda sia trascurabile;
che nessuna corrente si sovrapponga al moto ondoso;
Si adotta anche l’ipotesi di assenza di onde frangenti (al fine di rispettare la
condizione di moto irrotazionale o a potenziale)

56
Lo shoaling
Nei paragrafi precedenti si è fatto riferimento al caso di fondo orizzontale. Nel
presente paragrafo, invece, si prende in esame il caso della propagazione
dell’onda su di un fondale debolmente acclive. Per tale condizione, i valori dei
vari parametri dell’onda quali la velocità di fase, la lunghezza, la velocità di
gruppo e l’energia variano gradualmente lungo la direzione di propagazione. Si
assume che le proprietà dell’onda nel corso della propagazione mutano così
lentamente che, localmente, le variazioni risultano trascurabili e si possono
adottare le relazioni desunte per il caso di fondo orizzontale.
Nel caso dello shoaling, le ortogonali d’onda sono rettilinee e perpendicolari
alle linee batimetriche. Con riferimento allo schema in figura, si considerino
noti H e T in corrispondenza della sezione A e si ipotizza la propagazione
dell’onda da A verso B lungo il profilo assegnato h(x).
Si intende determinare l’altezza dell’onda nella sezione B. Poiché il moto è
periodico nell’intero dominio, il numero di onde che attraversano le sezioni A e
B è uguale. Infatti, nessuna onda viene generata o distrutta tra le sezioni A e
B. Allora T = costante e pari al valore del periodo nella sezione A.
Il bilancio d’energia tra A e B, considerando una quantità d’energia dissipata
per unità di superficie, D, è dato dalla relazione
B
A
x
xAB DdxPP (61)
ove P è il flusso medio d’energia che attraversa il piano di superficie unitaria.
Passando alle differenze finite, la (61) assume la forma
xDPP AB (61a)

57
che è di facile integrazione per h(x) assegnato. L’espressione di P è quella
determinata per l’onda lineare mentre D può essere valutata con la seguente
espressione valida per il caso di dissipazione per attrito di fondo
3
sinh3
4
kh
aCD r
(62)
con Cr coefficiente d’attrito il cui valore in campo è tipicamente pari a 10-2.
Trascurando le dissipazioni la (61) si riduce alla espressione 0dx
Pdda cui
teP tancos e quindi tecgH g tancos8
1 2 . Se la sezione A è in acque
profonde si può quindi scrivere
osog
goB HKH
c
cH
2/1
(63)
ove Ks è il coefficiente di shoaling, definito come
2/12/1
tanh 2
khn
c
cK
g
gos (64)
e quindi funzione della profondità relativa kh. L’andamento di Ks al variare di
h/L è indicato in figura. Tale andamento è detto curva di shoaling.

58
Tale curva presenta un minimo (≈ 0.91) in acque intermedie (kh ≈ 1,20). Al
diminuire della profondità relativa, Ks cresce indefinitamente e la curva
diventa inaccurata. Infatti, all’approssimarsi della profondità relativa a zero, la
ipotesi teP tancos non è più valida in quanto al diminuire della profondità ed
al crescere dell’altezza d’onda la teoria lineare non è utilizzabile. Inoltre,
intervengono fenomeni dissipativi non più trascurabili.
Con l’approssimarsi della profondità relativa a zero, si deve considerare una
teoria non lineare. Shuto (1974) ha proposto un’approssimazione non lineare
della curva di shoaling che può essere così riassunta
50per U tancos32U
50U30per tancos
30per U
RR2/5
R7/2
R
teHh
teHh
KHH
so
(65)
ove RU è un numero di Ursell modificato definito come 2
2
RUh
gHT .

59
La rifrazione
La rifrazione consiste in una rotazione dei fronti d’onda con conseguenti
variazioni d’altezza lungo di essi. La sua trattazione può essere distinta per i
casi di batimetriche rettilinee e parallele e di batimetria irregolare. In entrambi
in casi la direzione via via assunta dalle traiettorie è determinata mediante la
legge di Snell:
2
1
2
1
sin
sin
c
c
(66)
Batimetriche rettilinee e parallele
Sebbene questo caso non sia comune, è di interesse la sua trattazione in
quanto mostra che in natura i fenomeni di shoaling e rifrazione non sono
distinti e separati. Con riferimento allo schema in figura ove a indica la
distanza fra due raggi d’onda valutata lungo la batimetrica
si può scrivere la relazione
2
2
1
1
coscos bb
ovvero 2
1
2
1
cos
cos
b
b (67)
L’ipotesi di conservazione dell’energia tra due ortogonali adiacenti (assenza di
trasmissione laterale) si traduce nella
2211 PbPb (68)
ove P indica il flusso medio d’energia nel periodo

60
kh
khcgHP
2sinh
21
16
1 2 (69)
Si ottiene quindi l’equazione
2/1
2222
22
1111
11
2
112
tanh2sinh
21
tanh2sinh
21
cos
cos
hkhk
hk
hkhk
hk
HH
(70)
Nel caso h1>L1/2 (acque profonde) la (70), trascurando il pedice 2, si riduce
alla seguente
2/1
tanh2sinh
21
cos
cos
kh
kh
khHH
oo
(71)
Si può quindi scrivere rso KKHH
ove b
bK oo
r
cos
cos è il coefficiente di rifrazione (sempre minore di 1) e
2/1
2/12
1
tanh 2tanh2sin
21
g
gos c
ckhnkh
kh
khK è il coefficiente di
shoaling con
kh
khn
2sinh
21
2
1.
L’eq. ( 71 ) può essere riscritta nella forma
b
b
khkhkd
khHH o
o 22sinhtanh
2sinh
(72)

61
Batimetria irregolare
E’ stato trattato il problema della rifrazione per il caso in cui le batimetriche
possano schematizzarsi come rette fra loro parallele. Nel seguito si adegua il
problema al caso di batimetriche ad andamento irregolare.
Si fissi un punto P nel piano orizzontale e si assumano due assi coordinati: s
coincidente con la direzione locale di propagazione dell’onda e q ortogonale ad
s. Con riferimento allo schema in Figura, un fronte d’onda che attraversi il
punto P percorre nel tempo dt un tratto di lunghezza ds .

62
Nel tempo dt il fronte d’onda subisce una variazione d’inclinazione
dq
dtdqq
cccdt
d
(73)
ove α è l’angolo tra la direzione di propagazione e l’asse x, mentre c è la celerità
dell’onda nel punto P. Osservato che cdtds , la (73) assume la forma
(73a)
che prende il nome di principio di “Fermat. Esprimendo qc
in funzione delle
derivate xc
e yc
relative agli assi fissi, si può scrivere
cossiny
c
x
c
q
c
(74)
da cui
cossin
1
y
c
x
c
cds
d (75)
Questa ultima relazione, noti la direzione di propagazione su profondità
infinita ed il periodo dell’onda, permette di ricavare l’ortogonale passante per
The path of a ray of light between two points is the path that minimizes the travel time
q
c
cds
d
1

63
un qualsiasi punto P. La (75) risolta con il metodo delle caratteristiche ed uno
schema alle differenze finite consente di tracciare le ortogonali d’onda per
incrementi s .
Costruzione grafica del piano d’onda
Solo nel caso particolare che le isobate siano rettilinee e parallele, la
direzione delle onde può essere calcolata immediatamente; in ogni altro caso è
necessario procedere al tracciamento grafico del piano d’onda. Per ogni località
occorre tracciarne diversi: anzi, per ciascuna delle direzioni dominanti,
occorrerà prepararne una serie per vari periodi per poi trarne le opportune
considerazioni sulle caratteristiche delle onde agenti sulle strutture portuali in
progetto.
Esistono differenti metodi per il tracciamento grafico del piano d’onda. Nel
seguito se ne descrivono due. Il primo è detto Metodo del fronte dell’onda. Il
secondo è detto Metodo delle ortogonali. Entrambi si basano sulla preventiva
conoscenza della batimetria. Le carte dell’I.I.M. indicano la topografia del fondo
dell’area di studio. Possono essere richieste due o più carte in differenti scale,
ma le procedure sono identiche per qualsiasi scala. Le isobate sono tracciate
sulla carta o su una carta lucida sovrapposta; per varie profondità la scelta
dell’intervallo tra varie isobate dipende dal grado di accuratezza desiderato. La
linea di costa rappresenta, in ogni caso, un utile riferimento. Nel tracciare le
isobate, le piccole irregolarità devono essere omesse (appianate), poiché le
configurazioni del fondo, che sono comparativamente piccole rispetto alla
lunghezza dell’onda, non hanno effetto sulla apprezzabilità dell’onda. La
gamma dei periodi d’onda e delle direzioni dell’onda è individuata a partire
dalla conoscenza del clima ondoso nel bacino marino considerato.
Nel primo metodo per il tracciamento del piano d’onda, il cosiddetto metodo del
fronte dell’onda (Tenani), si parte da un’onda che al largo, su profondità
superiori a Lo/2, è rettilinea e, prendendo per centro punti di questa retta, si
tracciano dei cerchi aventi per raggio la distanza percorsa dall’onda in un certo
tempo t (ad esempio un periodo T o un suo multiplo nT, nel qual caso la
distanza risulta L o un multiplo di L, tenendo conto della velocità
corrispondente alla profondità d incontrata); l’inviluppo di tali cerchi è la

64
nuova posizione della cresta o fronte dell’onda dopo il tempo t. Applicando il
procedimento per successivi tempi t, si ottiene il piano d’onda (naturalmente t
dovrà scegliersi opportunamente in relazione ai valori della profondità dei
fondali e della scala della carta: questa, in genere, non sarà mai inferiore a
1/25.000). Si suggerisce di preparare una tabella come quella sotto riportata,
in cui, fissato il valore Lo e scelti i diversi valori h delle profondità inferiori a
Lo/2, si calcoleranno i corrispondenti valori di h/Lo e quindi C/Co = L/Lo, da
cui ricavare i valori L (si potranno utilizzare le tabelle fornite dal Wiegel e dallo
SPM). Una volta tracciati i vari fronti dell’onda ai tempi t, 2t,…Nt, fino ad
incontrare la linea di frangimento, si potrà procedere speditamente al
tracciamento delle ortogonali (o raggi) ai fronti dell’onda. Come già detto, il
coefficiente di rifrazione è dato da b
bK o
r
Nel secondo metodo, il cosiddetto metodo delle ortogonali, si rappresentano,
in acque profonde, i fronti d’onda, mediante rette parallele distanti Lo l’una
dall’altra, ed i raggi, mediante ortogonali ai fronti anzidetti opportunamente
intervallate. Si viene così a determinare un reticolo limitato dal largo verso
costa dalla isobata di profondità Lo/2 (soglia a valle della quale si manifesta il
fenomeno della rifrazione). Si disegna, all’interno della fascia compresa tra la
prima delle coppie di isobate da attraversare, la batimetrica mediana; si
prolunga il generico raggio proveniente dal largo fino ad intersecare detta
mediana in un punto per il quale va poi tracciata la tangente alla mediana
stessa. Quindi si utilizza un particolare regolo graduato costruito con
materiale trasparente (Figura). Detto regolo va posizionato come appresso
illustrato. Operativamente, si fa coincidere il punto di ascissa 1 con il punto di
intersezione anzidetto, e la linea ortogonale all’asse graduato con il raggio
incidente. Quindi si fa ruotare il regolo, facendo centro nel punto di ascissa O,
finchè l’asse graduato e la tangente alla mediana si intersecano nel punto di
coordinata C1/C2 che caratterizza la striscia interessata dalla costruzione. Il
raggio rifratto ha allora la stessa nuova direzione assunta dall’ortogonale. Va
osservato che i segmenti corrispondenti al raggio incidente ed al raggio rifratto
devono avere all’incirca la medesima lunghezza.

65
Per completare la costruzione del piano d’onda, si ripete il procedimento
appena descritto applicandolo a tutte le strisce successive. In alcuni casi può
essere utile procedere al tracciamento dei raggi, non più a partire dal largo
verso la costa, bensì partendo da punti particolari, situati ad esempio lungo la
costa o lungo le opere da progettare, nei quali si intende conoscere le
caratteristiche del moto ondoso. Tale procedimento è chiamato della “rifrazione
inversa”. La scala del regolo graduato va allora utilizzata nell’ambito dei valori
reciproci C2/Cl, ovviamente minori dell’unità. Il metodo grafico illustrato
diventa scarsamente attendibile quando i raggi si dispongono secondo
direzioni prossime a quelle delle isobate. In tal caso si usa dividere la generica
striscia come appresso illustrato. La striscia sopra considerata va suddivisa, a
partire dal punto di incidenza del raggio, mediante linee di massima pendenza
in più campi, ciascuno dei quali di lunghezza Ri = m Ji (dove Ji è la minima
distanza fra le due isobate relativa al campo i-esimo ed m è un coefficiente
opportuno - Figura). Attraverso il grafico di seguito riportato (Figura), si
determina il valore in funzione dei valori C2/C1 ed R/J, essendo
l’angolo di cui ruota il raggio rispetto alla direzione di ingresso. Il punto di
rotazione è fissato al centro di ciascun campo. Determinato l’andamento dei
raggi, si può completare il piano d’onda con la rappresentazione delle linee di
cresta che, lungo ciascun tubo di flusso, sono intervallate fra loro della
lunghezza d’onda corrispondente alla zona in esame. Si calcolano, quindi, le
altezze d’onda a riva moltiplicando il valore al largo per il coefficiente di
shoaling e per quello di rifrazione.
In conclusione, è utile ricordare che la determinazione di un piano d’onda si
appoggia su un procedimento grafico rigorosamente corretto solo se le isobate
sono rettilinee. Inoltre è importante rilevare che, durante il tracciamento,
possono incrociarsi ortogonali contigue con formazione delle cosiddette
“caustiche”, in corrispondenza delle quali la concentrazione dell’energia può
dar luogo a frangimento.
Infine, è opportuno segnalare che l’introduzione di procedimenti automatici
per il tracciamento dei piani d’onda ed il ricorso al metodo della “rifrazione
inversa spettrale”, consentono risoluzioni del problema più rapide e più
attendibili. Ciononostante, la costruzione grafica detta del fronte dell’onda,

66
consistente nel seguire le varie posizioni del fronte dell’onda nel suo avanzare
verso la costa, continua ad essere preferita, perchè chiara e permette di
stimare subito ad occhio gli effetti della rifrazione.

67

68
La diffrazione
La diffrazione dell’onda è il processo mediante il quale l’energia si diffonde
lateralmente alla direzione dominante della propagazione del moto ondoso. Nel
caso un’onda incontri una struttura (naturale o artificiale), la diffrazione si
manifesta in modo che l’azione perturbatrice dell’onda si trasmetta anche nella
zona d’ombra geometrica del frangiflutti. Quindi, in realtà c’è una trasmissione
laterale di energia e le caratteristiche di agitazione nella zona d’ombra
geometrica dipendono appunto dalle modalità con cui tale trasmissione si
manifesta. La conoscenza del fenomeno è di rilievo per la valutazione di
differenti scenari progettuali di opere per la difesa della costa o di opere
portuali.

69
Lo studio della diffrazione è stato condotto da differenti autori che hanno
proposto soluzioni analitiche per casi particolari.

70
Nel seguito si descrive la soluzione analitica classica di Penny e Price (1952)
per il caso di un’onda periodica lineare che, propagandosi in un piano xoy e su
fondo orizzontale, investa ortogonalmente una parete verticale semi-infinita.
Il potenziale di velocità in assenza della parete è
)cossinsin(cosh
)(coshtkykx
kh
zhkag
(73)
ove è l’angolo tra la direzione di propagazione dell’onda e l’asse y (Figura).
Come noto, un metodo conveniente per la soluzione delle equazioni
differenziali è quello detto di separazione delle variabili. A tal fine il potenziale
assume la forma
)(),()(),,,( tTyxBzZtzyx (74)
ove )cosh()( zhzZ essendo .coscosh tkh per l’ipotesi adottata di fondale
orizzontale. La condizione di periodicità dell’onda comporta
tiettT sin)( con 1i . La (74) può essere riscritta nella forma
tie ),( )(),,,( yxBzZtzyx (75)
che, sostituita nell’equazione di Laplace, determina l’equazione di Helmholtz
L’andamento della superficie libera, , rappresenta la proiezione su di un asse di un vettore di lunghezza a che forma
con l’asse l’angolo kyt , se y è la direzione di propagazione dell’onda. L’andamento della superficie libera può
anche essere espresso mediante la relazione equivalente tikyti yAa exp)(exp )(
.

71
0),(22
2
2
2
yxBk
y
B
x
B (76)
ove B è una funzione complessa di x e y (potenziale complesso).
La parete verticale semi-infinita è posta lungo la retta y=0, ha origine nel
punto x=0 e ha spessore trascurabile rispetto alla lunghezza d’onda. Per x < 0,
deve risultare che le onde si propagano lungo y. Allora risulta
ikyaeyxB ),( condizione di onda progressiva in direzione y>0 (76a)
ove a è l’ampiezza dell’onda. L’andamento della superficie libera in assenza
della parete (l’onda incidente) è dato dalla
)(
0
cosh
cosh),(1
),,(
kyti
ti
z
ekhg
ai
ekhyxBg
i
tgtyx
(77)
In corrispondenza della parete verticale (0<x<), (y=0) la (77) deve soddisfare la
condizione di parete verticale ed impermeabile
0/ yB (78)
La soluzione della equazione (76) è espressa dalla (Sommerfeld, 1896)
'
22 2/2/
2
1),( dxeedxee
iyxB xiikyxiiky
(78a)
che soddisfa la (76) e la (78) e in cui )(42 yrL
e )(42' yrL
ove
22 yxr ; i segni di e ' sono assunti a seconda del quadrante come
mostrato nello schema in Figura.
y
x
(+ , -) (- , -)
(+ , -) (+ , +)

72
L’espressione (78a) di B(x,y) soddisfa la (76)e la (78). Essa può essere
trasformata in una forma che consente l’utilizzo degli integrali di Fresnel
uu
dxxdxx0
2
0
2 2
cos ,2
sin
(78b)
La soluzione del problema è mostrata in Figura. In essa, per il caso di onda
incidente ortogonalmente una parete semi-infinita, sono indicati i fronti d’onda
e le linee luogo dei punti di ugual livello di agitazione ondosa
Penney e Price (1952) proposero una soluzione analitica della (76) anche per il
caso più generale di un treno d’onde che investa non ortogonalmente una
parete verticale semi-infinita. In coordinate polari, la (77) assume la forma
trGtrFH
tr sin,,,cos,,,2
),,( (78)
dove
22112211 sinsincoscos,,, quBquBquAquArF (79)
22112211 coscossinsin,,, quBquBquAquArG (80)
)(2
1 ,)(1
2
1uCuSuBuCuSuA FRFRFRFR (81)

73
u
FR
u
FR dxxuCdxxuS0
2
0
2 2
cos ,2
sin
(82)
2221 2
1sin/2 ,
2
1sin/2 krukru (83)
sin ,sin 21 krqkrq (84)
L’altezza dell’onda nel generico punto di coordinate polari ,r è
22, GFHrH , mentre il coefficiente di diffrazione, Kd, è dato da
22, GFrKd (85)
Si può osservare che anche in questo caso la determinazione della diffrazione
si basa sul calcolo degli integrali di Fresnel che sono tabellati in Abramowitz e
Stegen (1965).
Naturalmente, il coefficiente di diffrazione sulla parete interna ( 0 ) assume
valori decrescenti via via che ci si allontana dall’origine (testata del molo) della
parete stessa. Sulla parete interna ( 2/ ), dK assume un massimo a circa
1/3 di lunghezza d’onda dalla testata, nel caso di attacco ortogonale alla
parete ( 0 ); ovvero a poco più di una lunghezza d’onda dalla testata, nel
caso di attacco inclinato a 45°.
Alcune soluzioni esatte o leggermente approssimate sono state ricavate per
disposizioni schematiche e semplici di opere. Tali soluzioni, riportate in grafici
di semplice uso, possono fornire un valido aiuto nel corso delle progettazioni.
A titolo di esempio, nelle pagine seguenti sono riportati alcuni grafici di
diffrazione per il caso di incidenza ortogonale o obliqua dell’onda in
corrispondenza di una parete di lunghezza semi infinita.
Per il caso di studio della diffrazione prodotta da una imboccatura fra due
pareti, la larghezza del varco è detta B ed è espressa in multipli della
lunghezza dell’onda incidente. Se la larghezza è superiore a 5 lunghezze
d’onda, si affronta separatamente lo studio della diffrazione per ciascuna delle

74
due estremità e poi se ne sovrappongono gli effetti nella zona di interferenza.
Nel seguito sono riportati alcuni grafici di diffrazione prodotta da una
imboccatura fra due pareti per il caso di incidenza ortogonale. Essi sono
applicabili se B è inferiore a 5 lunghezze d’onda. Questi stessi grafici possono
essere utilizzati nel caso di incidenza obliqua: ci si riferisce al grafico relativo
ad una larghezza immaginaria B’ del varco ottenuta proiettando la reale
larghezza B lungo la ortogonale alla direzione di propagazione.

75

76

77

78

79
Rifrazione e diffrazione combinate
Generalmente il fondale adiacente un frangiflutti verso il largo e verso terra
non è orizzontale. Pertanto, si hanno contemporaneamente rifrazione e
diffrazione. Un metodo approssimato di valutazione delle relative
trasformazioni dell’onda consiste nell’applicare la teoria della diffrazione sino a
3-4 lunghezze d’onda dall’ostacolo e, successivamente, proseguire verso il largo
costruendo il diagramma di rifrazione. La Figura riporta un schema per
l’applicazione del metodo approssimato.
Come già visto, lo studio della rifrazione assume che la variazione del fondale
sia piccola ma non trascurabile. Il modello di diffrazione ipotizza la condizione
di acque profonde o la trascurabilità della pendenza del fondo in modo che
questa ultima non influenzi l’andamento della superficie d’onda. Nel modello di
rifrazione e diffrazione combinate si assume che la pendenza del fondale sia
bassa, ma che la forma d’onda ne sia modificata. I modelli di rifrazione e
diffrazione combinate si basano sulla soluzione di un’equazione che ha la
caratteristica di ridursi alla relazione valida per la sola rifrazione quando si
trascuri la diffrazione.

80
La mild slope equation (a phase averaged model)
Si è detto che, nella propagazione verso riva, se l’onda incontra un ostacolo
(p.es. una diga frangiflutti) subisce, oltre che la rifrazione, anche la diffrazione.
Orbene, mentre lo studio della sola rifrazione assume che la variazione del
fondale sia piccola ma non trascurabile, il modello di sola diffrazione ipotizza
la condizione di acque profonde o la trascurabilità della pendenza del fondo, in
modo che questa ultima non influenzi l’andamento della superficie d’onda.
Nel modello di rifrazione e diffrazione combinate si assume che la pendenza
del fondale sia bassa, ma che la forma d’onda nella sua propagazione ne venga
modificata. I modelli di rifrazione e diffrazione combinate si basano sulla
soluzione di un’equazione che ha la caratteristica di ridursi alla relazione
valida per la sola rifrazione quando si trascuri la diffrazione. L’equazione di
rifrazione e diffrazione combinate si può scrivere (Berkhoff, 1972)
0 2 c
ccc g
g (86)
ove indica il potenziale di velocità nelle due dimensioni x ed y che definiscono
il piano, c indica la celerità dell’onda, gc indica la celerità di gruppo,
T/2 con T periodo dell’onda. Il potenziale è definito dalla relazione
),()(),,( yxzfzyx (87)
ove )(zf è il fattore di risposta della pressione2 con z coordinata verticale. La
(86) è più nota con il nome di mild slope equation ed è stata determinata per
onda periodica lineare progressiva. Essa è un’equazione differenziale di tipo
ellittico e la sua risoluzione richiede la definizione di condizioni sul contorno
dell’intero dominio di integrazione. Per acque basse, la (86) si riduce
all’equazione lineare per acque basse. Per acque profonde, o per fondale
orizzontale, la (86) si riduce alla forma più nota dell’equazione di Helmholtz (la
76) che descrive la sola diffrazione.
2
cosh
)(cosh
kh
zhkf(z)
ove Lk /2 con L la lunghezza d’onda

81
Radder (1979) propose l’approssimazione parabolica alla equazione ellittica
di Laplace (86). Tale approssimazione affranca dalla necessità di definire la
condizione al contorno in corrispondenza del limite del dominio di calcolo verso
il quale l’onda si propaga. A fine anni 80, il calcolo automatico ha permesso la
risoluzione numerica della linear mild slope equation (86) nella sua
approssimazione parabolica. In particolare, un modello di rifrazione e
diffrazione combinate assai diffuso è il REFDIF sviluppato presso il CACR
dell’Università del Delaware (Kirby and Dalrymple, 1983) che, per onda
periodica o irregolare, tiene in conto anche gli effetti di una moderata non
linearità del moto ondoso, dell’attrito al fondo, della presenza di correnti non
indotte dal moto ondoso e del frangimento.

82
Set-down e set-up
Poco prima del frangimento si determina una lieve depressione della superficie
libera che viene detta set-down. Invece, nella zona dei frangenti si osserva un
lieve innalzamento della quota del l.m.m. che è detto set-up.
Il valore del set-down può essere stimato mediante la relazione
kh
kH
2sinh8
2 (86)
per H e k calcolati alla profondità h. Il valore del set-up è dato dall’espressione
bb hhK (87)
ove b indica il set-down in corrispondenza del punto di frangimento e viene
determinato con la precedente (86), bh è la profondità al punto di frangimento,
h è la profondità al punto di interesse nella zona dei frangenti e K una costante
il cui valore è dato da
23/81
1
K (88)
con 73.0 .

83
Radiation stress (spinta dinamica o pressione di propagazione)
(introduzione da Svendsen 232 e poi short waves 83) BOCCOTTI per termini
Le onde che si propagano lungo il profilo di una spiaggia generano delle
variazioni del livello medio mare. In particolare, al largo della zona dei
frangenti si osserva una lieve depressione del livello medio mare rispetto al
livello medio mare calmo (set-down); invece, nella zona dei frangenti e verso
riva si osserva un innalzamento del livello medio mare rispetto al livello medio
mare calmo (set-up). In natura, il set-down è dell’ordine di pochi cm e quindi di
ardua osservazione; il set-up è più pronunciato. Tali variazioni del l.m.m. sono
determinate dalla presenza della cosiddetta radiation stress che fu descritta
per la prima volta da Longuet-Higgins e Stewart (1960). La radiation stress ha
le dimensioni di un flusso di quantità di moto – è dunque una forza – ed è
definita come l’eccesso di flusso di quantità di moto determinato dal
moto ondoso. Essa è equivalente ad una forza media esercitata dalle onde sul
volume d’acqua attraverso il quale si propagano. Tali forze, applicate ad un
volume d’acqua possono avere risultante non nulla se non bilanciate dai
gradienti di pressione (proporzionale alla pendenza della superficie media del
mare). In tal caso, si determinano le correnti litoranee (longshore currents) o
sistemi di circolazione costiera (nearshore circulating currents).
Nella formulazione che segue si assume il fondo debolmente acclive e
l’inesistenza di correnti.
Consideriamo un’onda sinusoidale propagantesi lungo x e il flusso della
componente orizzontale della quantità di moto attraverso il piano x = cost. Tale
forza è causata dalla pressione e dalla avvezione. Il flusso della componente
lungo x della quantità di moto che attraversa un piano x = cost. di superficie
infinitesima δyδz nell’unità di tempo per effetto della pressione è pari a pδyδz;
quello causato dall’avvezione è dato dal prodotto tra la componente lungo x
della quantità di moto per unità di volume del fluido (ρu) e la quantità di fluido
che attraversa il piano nell’unità di tempo (uδyδz). La risultante è zyup 2 .
Integrando dal fondo sino alla superficie si ha la componente lungo x del flusso
di quantità di moto istantaneo che attraversa un piano x = cost. di larghezza δy

84
h
zyup 2
Il contributo dato dall’onda al valore medio nel tempo di detta forza è detto
radiation stress ed è indicato con xxS . La sua espressione è la seguente
dzpdzupSh
oh
xx )(0
2
in cui il contributo idrostatico è dato da 200
2
1 ghdzgzdzp
hho
. In
merito al pedice xx, la prima x indica la direzione del flusso (attraverso un
piano x = cost.), la seconda x indica la componente del flusso di quantità di
moto. Per onde sinusoidali si ha
EnSxx
2
12
ove kh
khn
2sinh2
1
Estendendo la trattazione al caso in cui l’onda si propaghi con direzione
non coincidente con x, le particelle di fluido che attraversano il piano x = cost.
portano con loro non solo la componente lungo x della quantità di moto (ρu
per unità di volume) che per unità di tempo e di superficie è pari a u(ρu), ma
anche la componente lungo y della quantità di moto (ρv per unità di volume)
che per unità di tempo e di superficie è pari a u(ρv). Si può quindi definire una
componente xy della radiation stress
h
xy dzvuS )(
In accordo a quanto fatto innanzi, si può considerare un piano y = cost. e
determinare quindi le componenti yy e yx del radiation stress
22
2
1 )( ghdzvpS
hyy
h
yx dzuvS )(

85
xxS e yyS rappresentano degli sforzi normali mentre, xyS e yxS sono sforzi
tangenziali. Il tensore radiation stress, come qualsiasi tensore è simmetrico
( xyS = yxS ).
Per il caso di onda sinusoidale propagantesi in direzione non coincidente con
x, si ha
EnnSxx
2
1cos2
EnSS yxxy sincos
EnnSyy
2
1sin2
ove β è l’angolo tra direzione di propagazione dell’onda e l’asse x.

86
Metodi moderni per lo studio della propagazione dell’onda alla riva
Come indicato nella parte precedente, le onde nella propagazione verso costa possono
continuare a crescere a causa della continua azione del vento, oppure, possono perdere
energia a causa del frangimento, dell’attrito di fondo o per la percolazione. Questi effetti
non possono essere realisticamente inseriti in calcolazioni manuali. In verità, come si
desume facilmente dalle precedenti esposizioni, i metodi manuali sono tediosi e soggetti a
molte imprecisioni. Notevoli sviluppi sono stati fatti nel calcolo computerizzato della
trasformazione delle onde (cui si è accennato ai paragrafi 8.4. e 8.5). Molte di queste
procedure possono funzionare efficacemente su un personal computer, non richiedendo
un supercomputer. Pertanto, le più semplici fra esse, possono essere utilizzate senza
grande difficoltà da molti ingegneri.
Di seguito, vengono presentati tre programmi per computer che sono disponibili e in uso
presso l’U.S. Corps of Engineers. Ognuno di essi viene brevemente descritto, con
l’avvertimento che ciascuno ha le sue complicazioni e richiede qualche sforzo per usarlo
con proprietà. Si dà anche una breve descrizione delle potenzialità di questi codici.
Chiaramente, oggi sono disponibili sul mercato altri programmi per computer usabili per
gli stessi usi. L’adattabilità e l’accuratezza di ognuno di questi codici dipendono dal
problema allo studio e dal modo con il quale il codice è applicato. Con l’eccezione del caso
in cui vi sia una batimetria molto semplice, si raccomanda di usare, negli studi della
trasformazione dell’onda vicino alla riva, un codice capace di gestire le complessità
richieste, ricordando che l’approccio numerico scelto dipende dal tipo di problema da
affrontare e risolvere.
I tre modelli che più avanti vengono illustrati sono modelli statici (steady‐state). In realtà,
sono disponibili modelli per acque basse time‐dependent (Jensen et al. 1987; Demirbilek
and Webster 1992a, 1992b), ma di essi non è possibile dire qui, poiché richiedono grandi
serie di dati meteorologici e non possono essere facilmente applicati. Le caratteristiche
principali di detti tre modelli vengono di seguito illustrate:
Il (RCPWAVE) RCPWAVE è un modello statico (steady‐state) basato sull’equazione
dell’onda lineare su dolce pendenza, che include il frangimento (modello detto anche ad
una linea). Esso è applicabile su aree costiere aperte senza strutture. In pratica, si tratta di
un approccio con onda monocromatica. Ia sua applicazione va limitata a grandi zone di
costa lineare.
Il (REFDIF1) REFDIF è ancora un modello steady‐state basato su una soluzione parabolica
approssimata dell’equazione su dolce pendenza. Il modello include il frangimento
dell’onda, il wave damping e alcuni effetti non lineari. Il modello può simulare gli aspetti
della propagazione associati con semplici correnti e può includere strutture costiere.
Il (STWAVE) STWAVE è sempre un modello steady‐state di onda lineare che valuta però
l’evoluzione dello spettro direzionale nello spazio. Il modello include il frangimento,

87
l’attrito di fondo, la percolazione e l’input del vento per il trasferimento non lineare
dell’energia con lo spettro dell’onda. Esso ha due modi per trattare la diffrazione
dell’energia dell’onda e il dominio di calcolo può includere strutture semplici. I modelli
possono gestire aspetti di propagazione associati con correnti semplici.
Ognuno dei tre suddetti modelli ha considerevoli qualità e può essere una scelta
appropriata per lo studio della trasformazione dell’onda. Comunque, nessuno di essi può
essere considerato come applicabile universalmente e le risposte di tutti possono risultare
imprecise se le ipotesi fatte non sono rispettate nello sviluppo del modello. In ogni caso,
gli utenti di qualsiasi modello devono avere vera familiarità con il modello, le sue ipotesi e
limitazioni.