Corso di storia economica Patrizio Bianchi Lezione 4 – lindustria in Italia.
Upload
trinhnguyetCategory
view
215download
0
Robotica Intelligente come driver per l’industria Italianadriver per l industria Italiana
Ramiro dell’Erba- Ricercatore ENEA
INDUSTRIA 4.0L’importanza della collaborazione Imprese – Enti di ricerca per la p p pcompetitività del Paese
Verona22 marzo 2016

Chi siamo? Le origini1960
ENEAENEAFoto storiche del primoprimo teleoperatore Mascot PossedevaMascot. Possedeva già mobilità, visione e grandevisione e grande sensibilità di force-feedbackfeedback
2
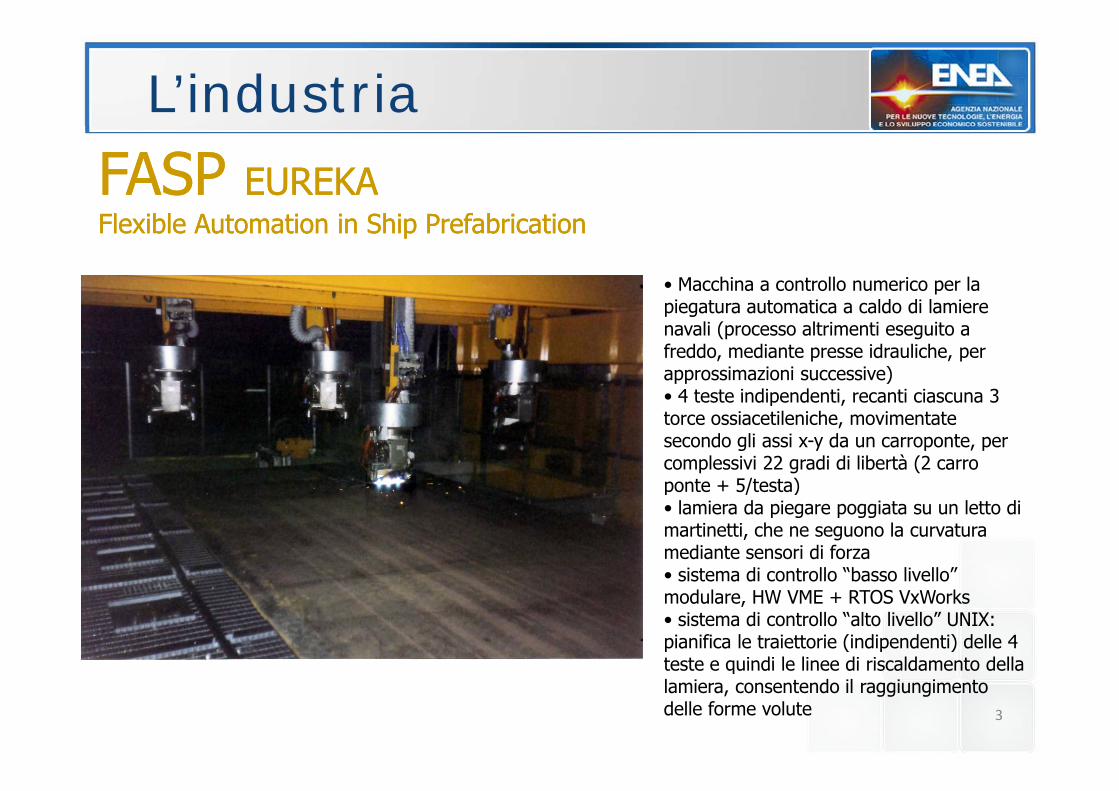
L’industriaFASP FASP EUREKAEUREKAFl iblFl ibl A t tiA t ti ii ShiShi P f b i tiP f b i tiFlexibleFlexible AutomationAutomation in in ShipShip PrefabricationPrefabrication
Piegatura lamiere
• Macchina a controllo numerico per la piegatura automatica a caldo di lamierepiegatura automatica a caldo di lamiere navali (processo altrimenti eseguito a freddo, mediante presse idrauliche, per approssimazioni successive)• 4 teste indipendenti recanti ciascuna 3• 4 teste indipendenti, recanti ciascuna 3 torce ossiacetileniche, movimentate secondo gli assi x-y da un carroponte, per complessivi 22 gradi di libertà (2 carro ponte + 5/testa)ponte + 5/testa)• lamiera da piegare poggiata su un letto di martinetti, che ne seguono la curvatura mediante sensori di forza• sistema di controllo “basso livello”• sistema di controllo basso livello modulare, HW VME + RTOS VxWorks• sistema di controllo “alto livello” UNIX: pianifica le traiettorie (indipendenti) delle 4 teste e quindi le linee di riscaldamento della
3
teste e quindi le linee di riscaldamento della lamiera, consentendo il raggiungimento delle forme volute
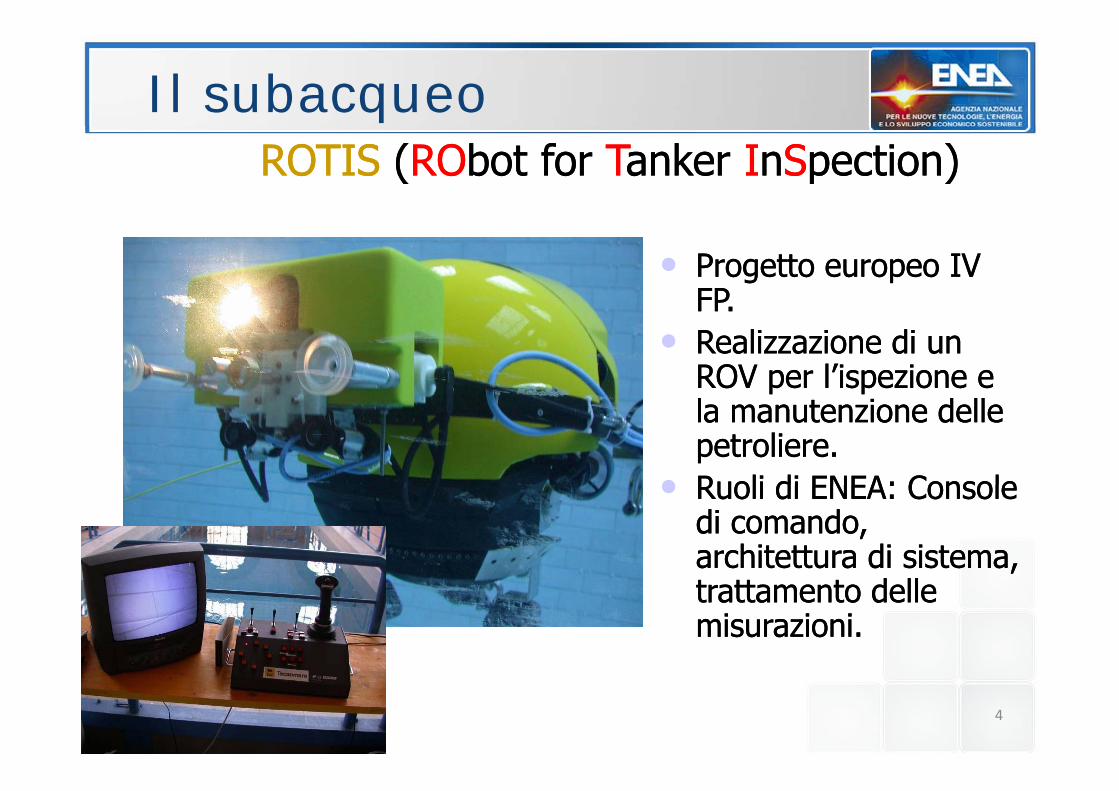
Il subacqueoROTISROTIS ((RORObot for bot for TTanker anker IInnSSpection)pection)
•• Progetto europeo IV Progetto europeo IV FPFPFP.FP.
•• Realizzazione di un Realizzazione di un ROV per l’ispezione e ROV per l’ispezione e la manutenzione delle la manutenzione delle petroliere.petroliere.
•• Ruoli di ENEA: ConsoleRuoli di ENEA: Console•• Ruoli di ENEA: Console Ruoli di ENEA: Console di comando, di comando, architettura di sistema, architettura di sistema, trattamento delle trattamento delle misurazioni.misurazioni.
4
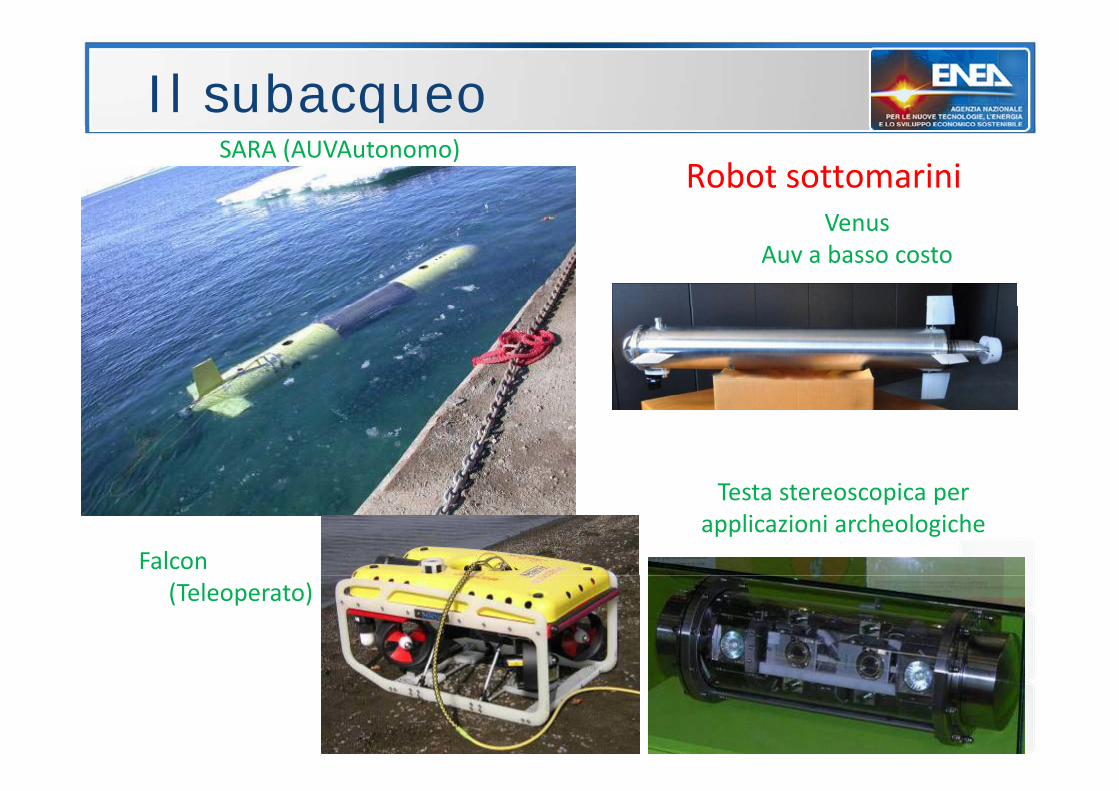
Il subacqueoRobot sottomarini
SARA (AUVAutonomo)
VVenusAuv a basso costo
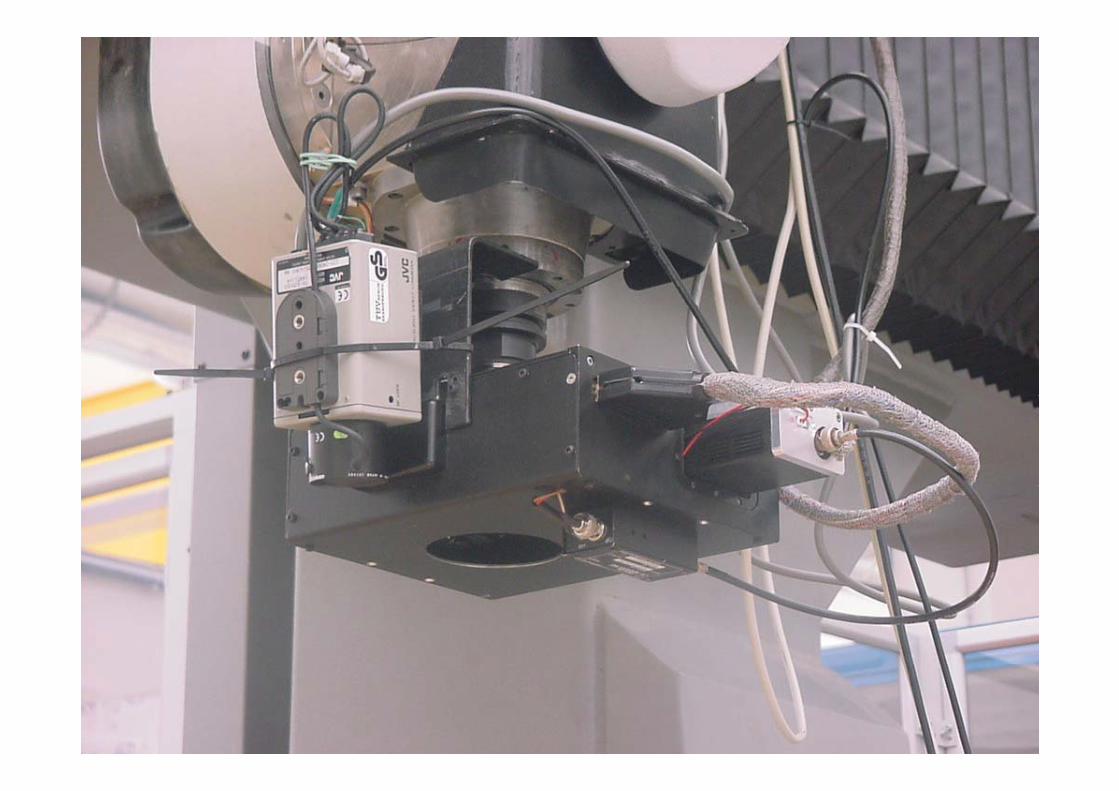
T t t iTesta stereoscopica per applicazioni archeologiche
Falcon (Teleoperato)
Il subacqueoRobot sottomarini
Modem ottico sperimentale
VVenusAuv a basso costo

L’industriaA lato una vista del dimostratore integrato, realizzato nel corso d ll’ i i ’ l i ll b idell’attivita’ svolta in collaborazione con BS e Cosmob.
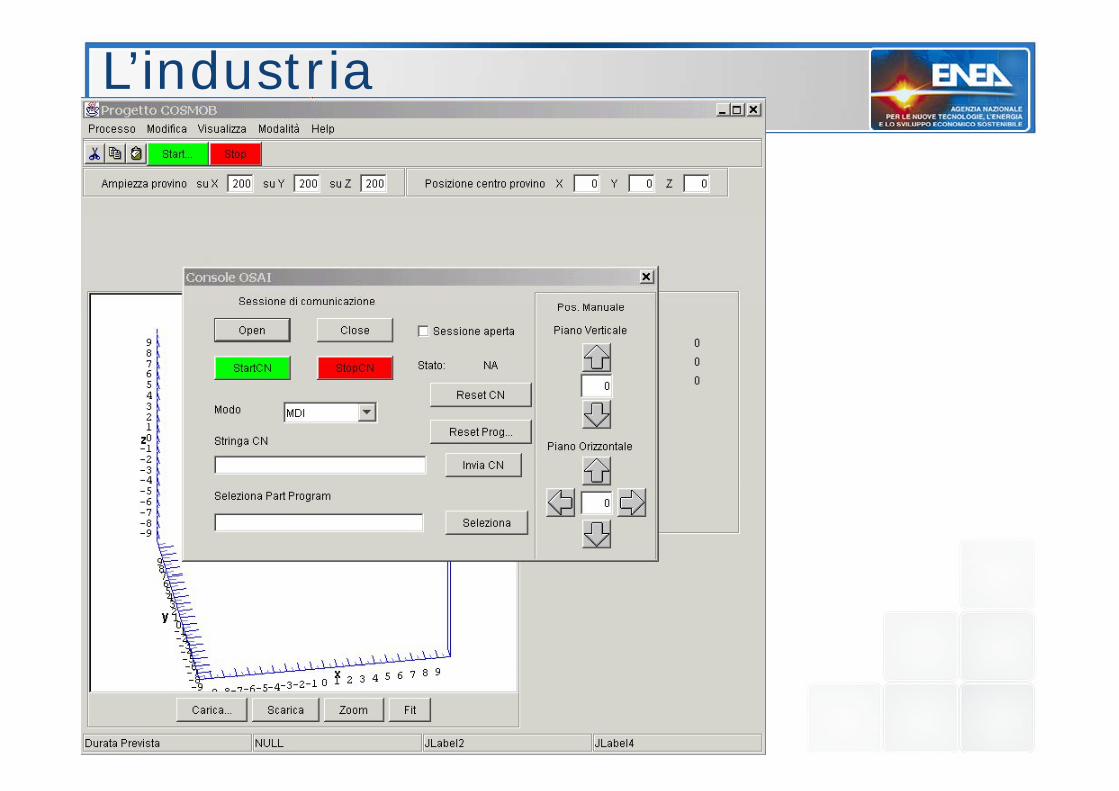
L’industria
Le PMI
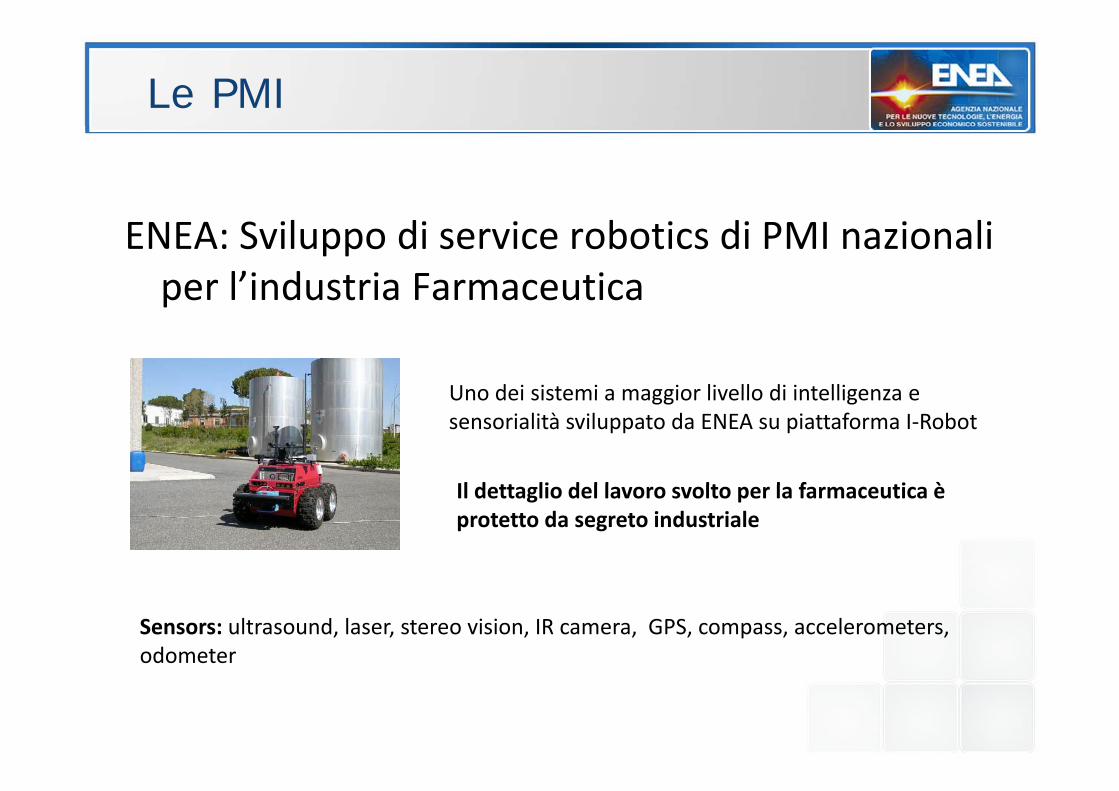
ENEA: Sviluppo di service robotics di PMI nazionali per l’industria Farmaceuticap
Uno dei sistemi a maggior livello di intelligenza eUno dei sistemi a maggior livello di intelligenza e sensorialità sviluppato da ENEA su piattaforma I‐Robot
Il d tt li d l l lt l f ti èIl dettaglio del lavoro svolto per la farmaceutica è protetto da segreto industriale
Sensors: ultrasound, laser, stereo vision, IR camera, GPS, compass, accelerometers, odometer
Beni culturali: la Realtà Aumentata
Optical see‐through displays show virtual informationOptical see through displays show virtual information
merged into the real world
Alcuni impieghi della robotica
• La robotica come strumento di produzione di prodotti finali
• La robotica come prodotto finale (entertainment, service, sanità, domestico)
• La robotica per il militare e la security
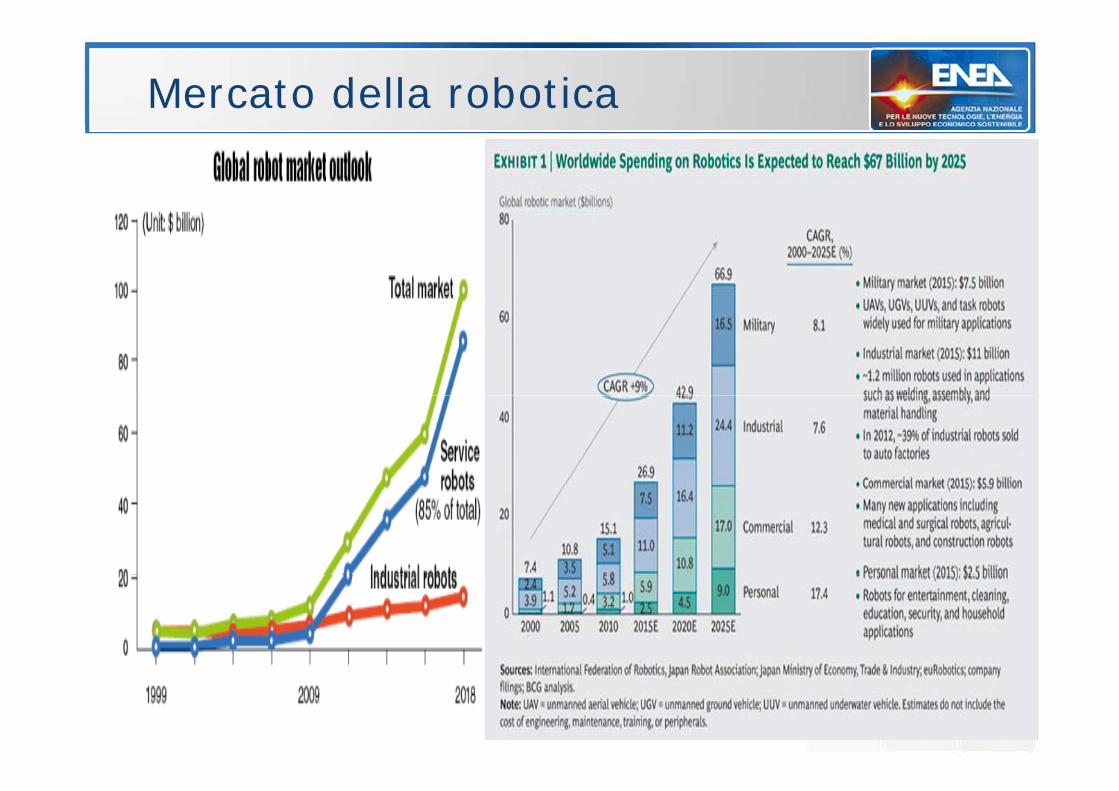
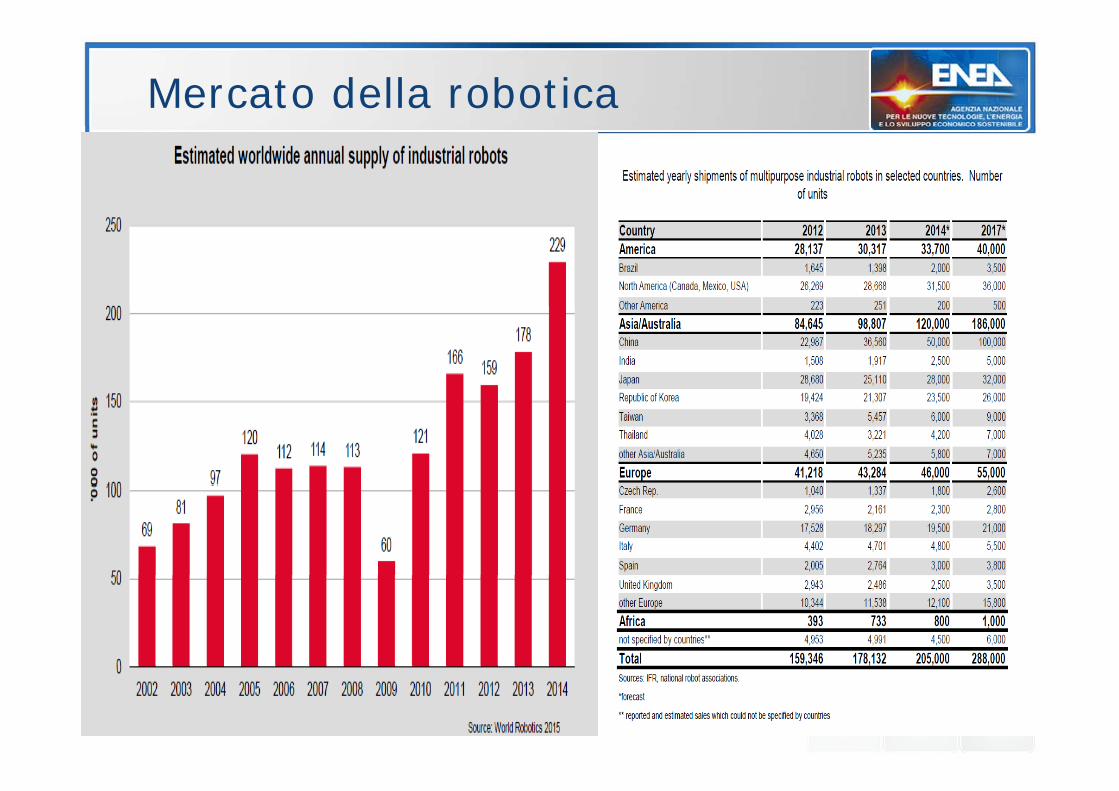
Mercato della robotica
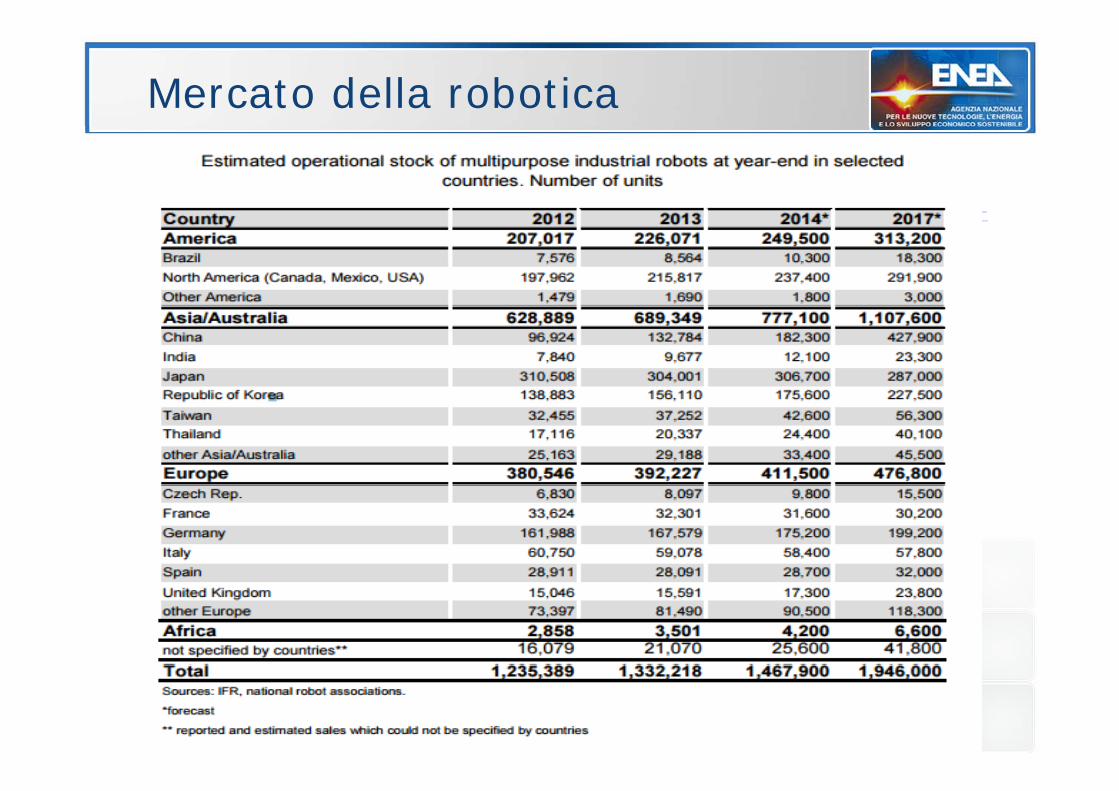
Mercato della robotica
Mercato della robotica
http://www.ifr.org/news/ifr‐press‐release/survey‐13‐million‐industrial‐robots‐to‐release/survey 13 million industrial robots toenter‐service‐by‐2018‐799/
https://www.linkedin.com/pulse/world‐robotics‐statistics‐2014‐forecasts‐2015‐2018‐released‐haegele?forceNoSplash=true
Mercato della robotica
G d it d l i i d t i l• Grande crescita del service, industriale cresce meno.
• Service diviso in professional e domestic• Service diviso in professional e domesticservice
• Attualmente 1 3 mil di robot per 11M$• Attualmente 1,3 mil di robot per 11M$ fatturato indust. e 6M$ service 21M$ di indottoindotto.
• Ci si aspetta al 2018 Prof. service 150krobot per 20 Miliardi $ (sono molto costosi)per 20 Miliardi $ (sono molto costosi)
• 35 mil utenze domestiche da 20M$ nel 2018 per 15M$ indotto p $
Strumento di produzionetrend della ricercatrend della ricerca
Incremento del mercato (e l’Italia?)Lavorare accanto all’uomoLavorare accanto all uomo
Soft robotics (sia meccanica che software)ll f ( )Intelligent Interfaces (riprogrammazione avanzata)
La Fabbrica intelligentegFlexibilityGestione autonoma dei flussiGestione autonoma dei flussiProgrammazione di fabbrica
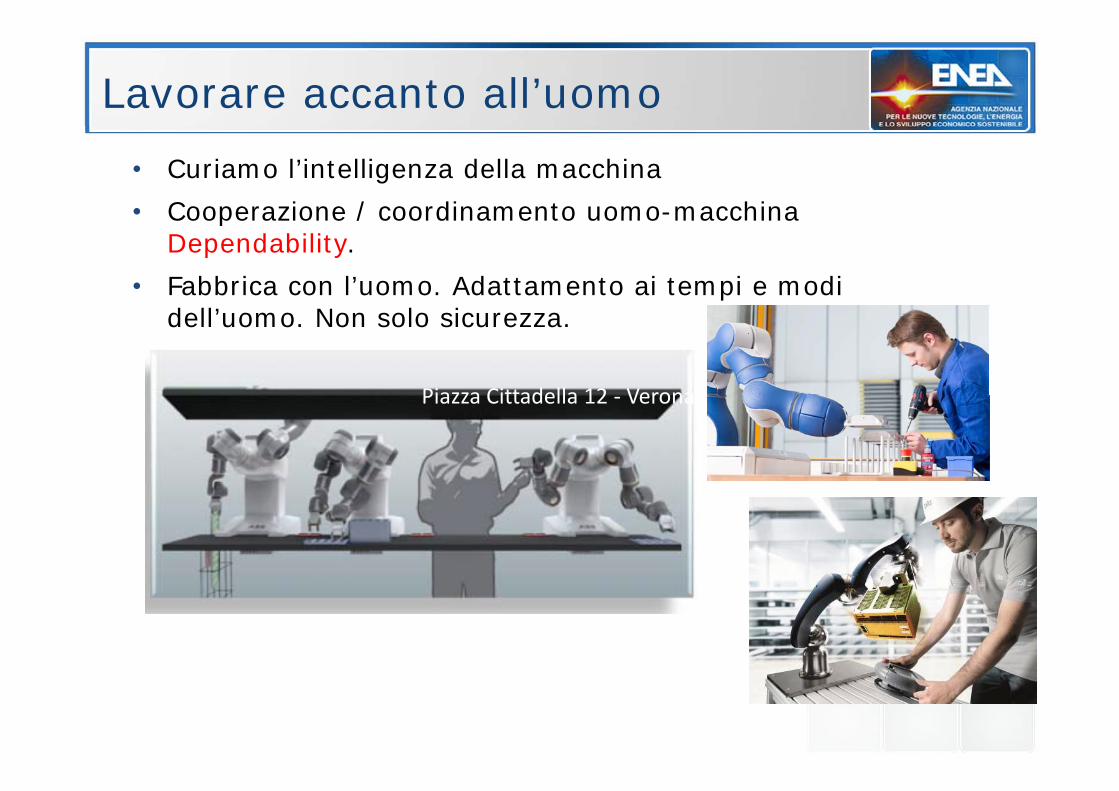
Lavorare accanto all’uomo• Curiamo l’intelligenza della macchina• Cooperazione / coordinamento uomo-macchinaCooperazione / coordinamento uomo macchina
Dependability. • Fabbrica con l’uomo. Adattamento ai tempi e modi
dell’uomo. Non solo sicurezza.
Piazza Cittadella 12 VeronaPiazza Cittadella 12 ‐ Verona

Vantaggi dell’intelligenza
Come strumento di produzione FlessibilitàFlessibilitàInterfaccia Produttività (sull’intero ciclo –programmazione –esecuzione – mobilità – multi cooperazione ‐ anche con uomo)• Fabbrica autonoma (macchine (
eterogenee)
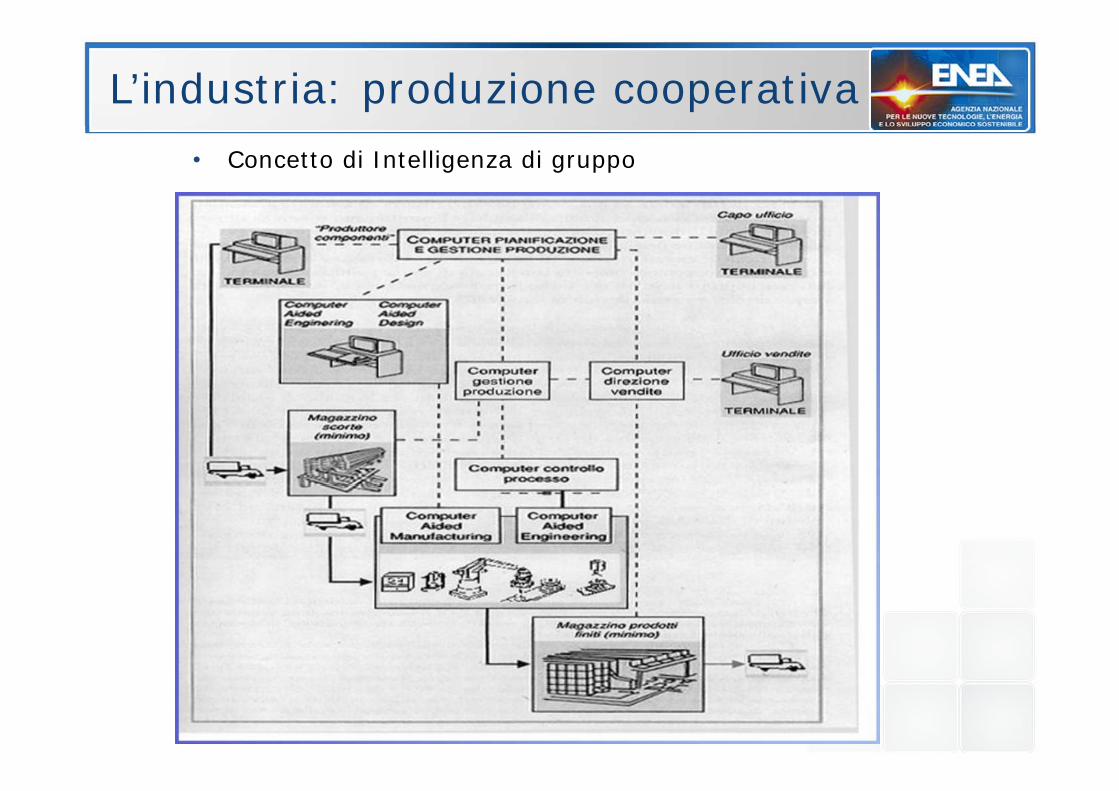
L’industria: produzione cooperativa• Concetto di Intelligenza di gruppo

La robotica come prodotto finale
Esplosione dei roomba e loro cloni (domotica)Games / Pets Fallimento? (provvisorio)Games / Pets Fallimento? (provvisorio) dell’entertainment
b ( d lService Robotics (edilizia, auto, emergencyrovers marini e terrestri, security, medicina e chirurgia)
DRONI (security safety servizioDRONI (security, safety, servizio, protezione civile, entertainment)

Vantaggi dell’intelligenzaCome prodotto finaleInteragisce meglioInteragisce meglio (dependability) – single
Si coordina meglio con altriSi coordina meglio con altri robot (dependability) –socialsocial
Prestazione più elevata in ambienti umani (poco strutturati)
Competitività della industria high‐tech nazionale (intelligence technologycome driver)
Competitività e industria high‐tech nazionale (intelligence technology come driver)
Intelligenza driver fondamentale… ma+ intelligenza= + autonomia = + conflitto+ intelligenza + autonomia + conflitto potenziale
d à dQuindi serve una maggiore capacità di prevedere e correggere – sistemi dependable, resilient, reliable
Sviluppo di algoritmi ed emulation toolsSviluppo di algoritmi ed emulation tools
Competitività e industria high‐tech nazionale (intelligence technology come driver)
’ li i d i d i di i ( i ) il dL’Italia possiede una expertise accademica e di ricerca (Univ. ENEA‐CNR) tra il secondo e il terzo posto al mondo
Tra i nomi che sono stati presidenti per anni delle maggiori società di ricerca internazionale (IEEE‐RAS, IFAC, IFR) – Bruno Siciliano, Cecilia Laschi, Paolo Dario, Arturo Baroncelli, Antonio Bicchi
Tra i recenti successi il premio a tre ricercatrici italiane di robotica come migliori alTra i recenti successi il premio a tre ricercatrici italiane di robotica come migliori al mondo nel settore (Cecilia Laschi, Barbara Mazzolai (vice pres. IIT), Barbara Caputo (univ. Sapienza)
La ricerca italiana potrebbe fornire un supporto di enorme valore ad una espansioneLa ricerca italiana potrebbe fornire un supporto di enorme valore ad una espansione dell’industria (di robotica) media e anche grande nazionale (e in generale del prodotto finale) verso prodotti di robotica ad alto valore aggiunto (intelligenza e sensorialita’)sensorialita )
Considerata la propensione nazionale ai prodotti tecnologici (consumo, vedi smartphone, tablet), il mercato italiano potrebbe essere potenzialmente molto predisposto ad accettare robot di entertainment e domesticipredisposto ad accettare robot di entertainment e domestici
Una società di robot
Quando pensiamo ad una società immaginiamo una società come quella dell’uomoQuando pensiamo ad una società immaginiamo una società come quella dell uomo, ma qualsiasi aggregazione di automi in grado di svolgere compiti con alto livello di autonomia collaborando tra loro è di fatto una società. Una RS è una struttura (eventualmente gerarchica, con regole dettate dallo scopo) di robot individuali con ( g , g p )obbiettivi specifici diversi ma obbiettivi globali comuni dettati dall’uomo. E’ necessario un comportamento dependable
Una società non ha lo stesso livello di affidabilità di una singola macchina e per una società non valgono i classici di affidabilità che valgono il singolo robot. Occorre perciò introdurre nuovi concetti anche perché i danni che deriverebbero dal blocco di una fabbrica a causa di incompatibilità casuali potrebbero essere molto elevati. Bisogna evitare comportamenti collettivi NON desiderati dovuti sia alla interazione uomo‐robot sia alla risposta della singola macchina al contesto che può variare
La Social Dependability dei robots, di cui ENEA si è occupato probabilmente come primo al mondo, cerca di rispondere a questi problemi quantitativamente
Da mucchio di macchine a una società di robot
Per passare da un mucchio di machine (guida a responsabilità umana) ad una Società ( bilità di i t l i tà di(responsabilità condivisa tra le società di macchine egli umani) servono alcuni elementi “sine qua non”
Regole di comportamento condivise
QUALITA’ Robot Intelligence Newg
CAPACITA’ Inter‐Robot Communications capability
NewRobotSociety
NECESSITA’ di cooperare e comunicare per un lavoro comune
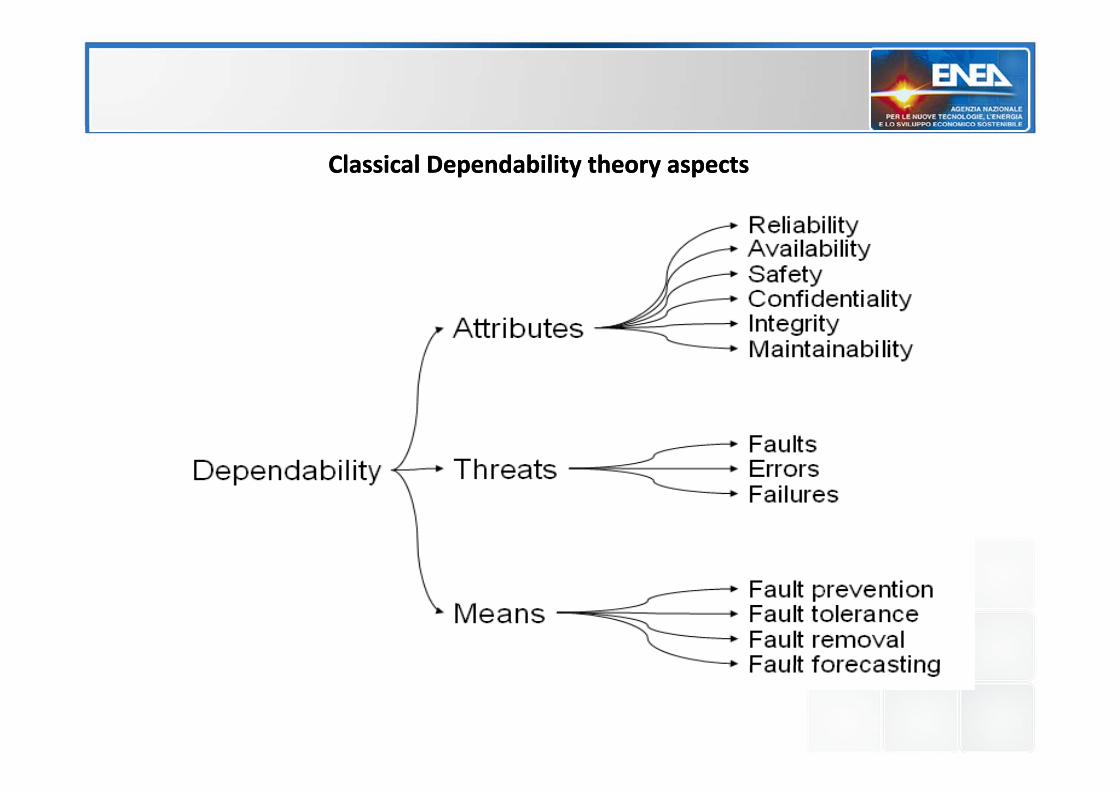
ClassicalClassical DependabilityDependability theorytheory aspectsaspects
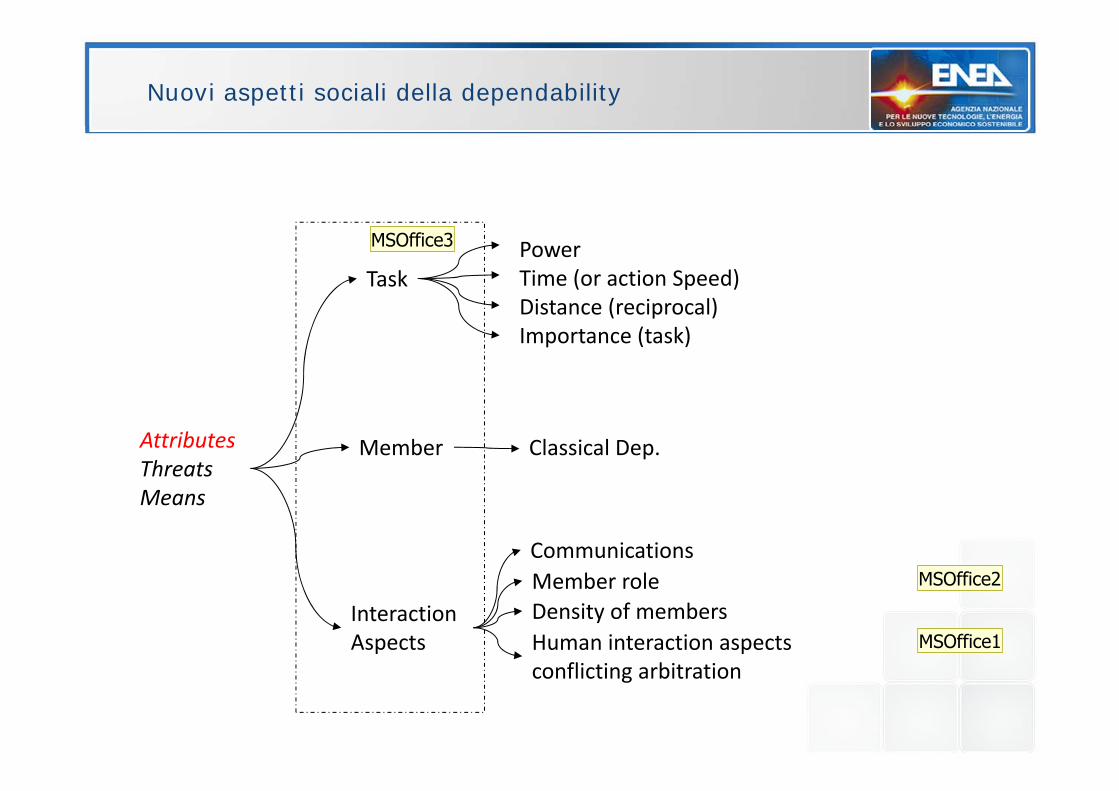
Nuovi aspetti sociali della dependability
TaskPowerTime (or action Speed)Distance (reciprocal)Distance (reciprocal)Importance (task)Social
Dependability
Member Classical Dep. AttributesThreats
CommunicationsM b l
Means
InteractionAspects Human interaction aspects
fli ti bit ti
Density of membersMember role
conflicting arbitrationMSOffice1
MSOffice2
MSOffice3
Diapositiva 29
MSOffice1 need or capability to interact not always needed – task – but a limitation in number of units simultaneously operative ; 17/04/2008
MSOffice2 need for Hyerarchical (?) or networked (?) organisations and roles ; 17/04/2008
MSOffice3 Dubbio sulla coerenza della definizione task e sulla sua chiarezza (task del membro o della societa') chiarire usare il plurale usare la parola energia? ; 30/04/2008
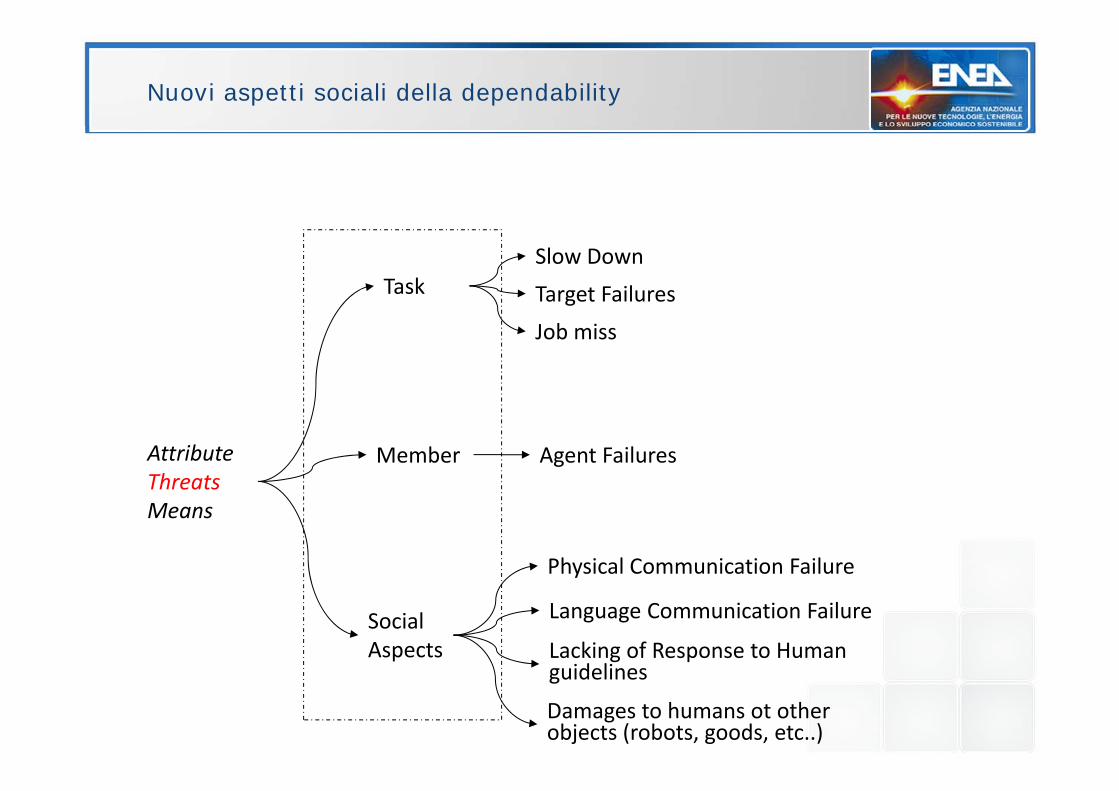
Nuovi aspetti sociali della dependability
Task Target Failures
Slow Down
SocialDependability
Job miss
Member Agent FailuresAttributesThreats
Physical Communication Failure
ThreatsMeans
Social Aspects
y
Lacking of Response to Humanid li
Language Communication Failure
guidelines
Damages to humans ot otherobjects (robots, goods, etc..)
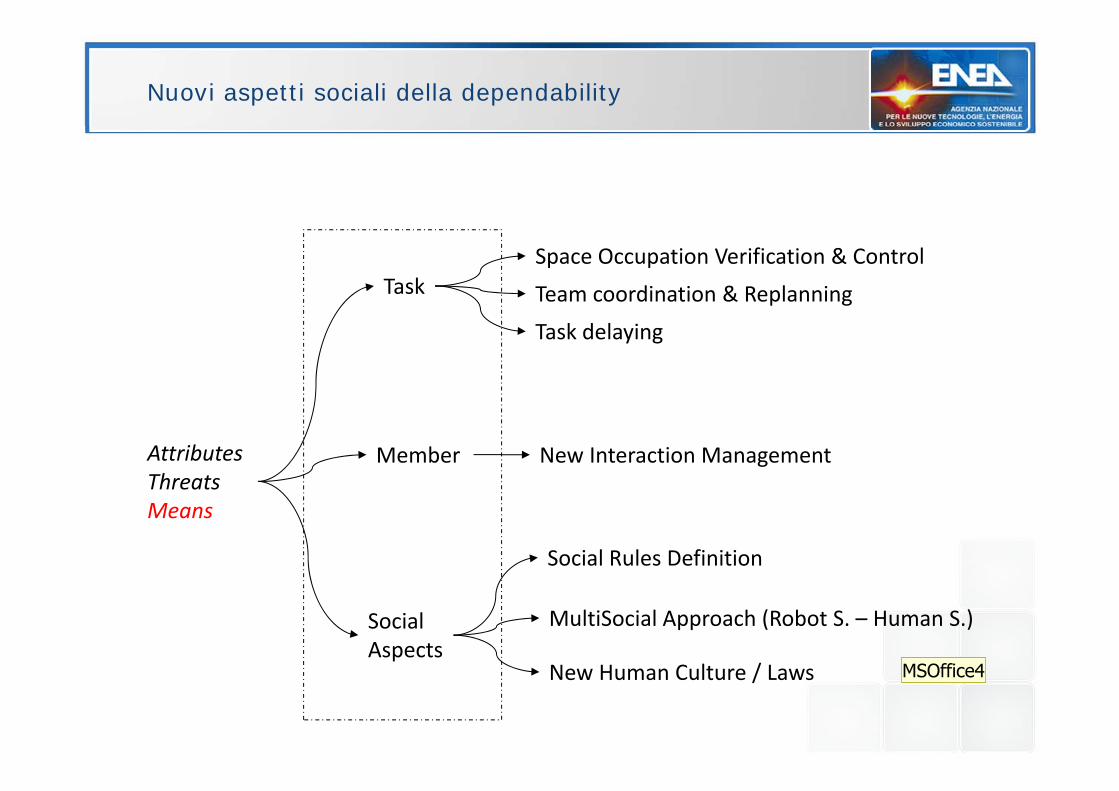
Nuovi aspetti sociali della dependability
Task Team coordination & Replanning
Space Occupation Verification & Control
Task delayingSocialDependability
Member New Interaction ManagementAttributesThreats
Social Rules Definition
ThreatsMeans
Social Aspects
N H C l / L
MultiSocial Approach (Robot S. – Human S.)
New Human Culture / Laws MSOffice4
Diapositiva 31
MSOffice4 Things cannot be in charge only to Robots and Robot Designers. In a multisocietal situation also human society must be prepared to manage the new relationship. Similar needs are already established in the working world to define rules for increasing safety of workers in complex environments were production or servicing machines share the space with humans ; 25/04/2008
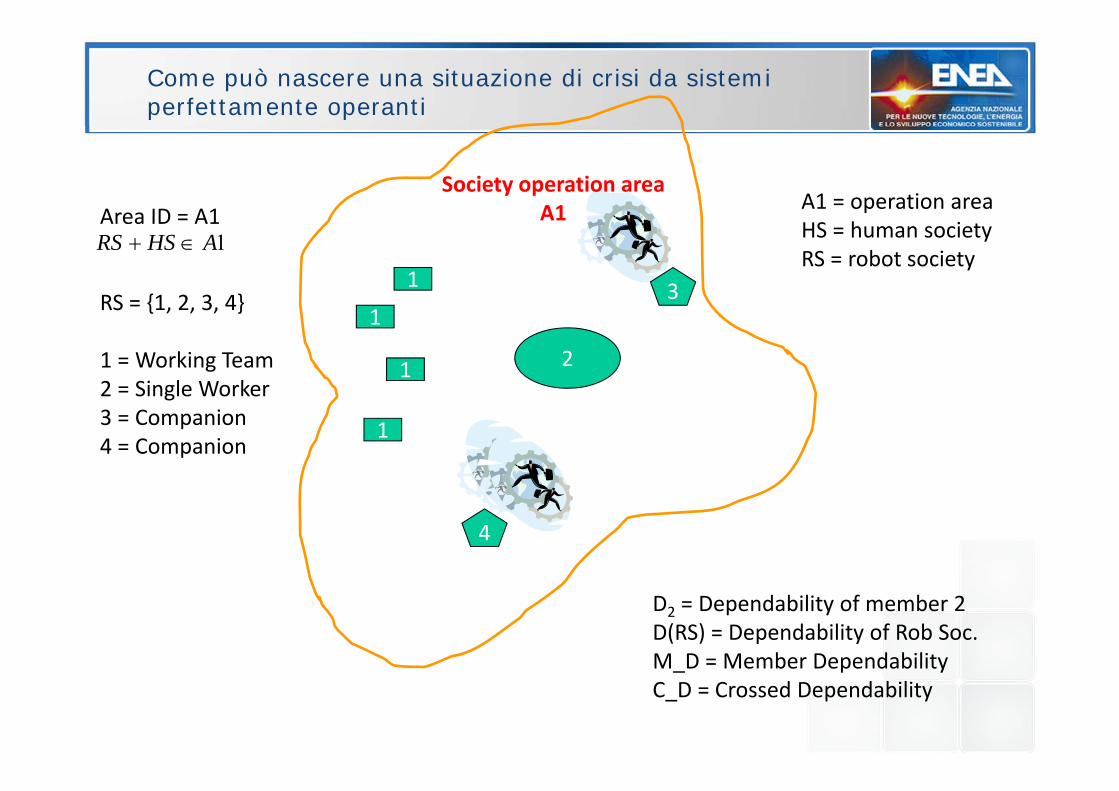
Come può nascere una situazione di crisi da sistemi perfettamente operanti
Society operation areaA1Area ID = A1
A1 = operation areaA1
1 3
Area ID = A1
RS = {1 2 3 4}
HS = human societyRS = robot society
1AHSRS
1
1 2
RS = {1, 2, 3, 4}
1 = Working Team2 = Single Worker
1
2 Single Worker3 = Companion4 = Companion
4
D2 = Dependability of member 2D(RS) = Dependability of Rob Soc.M D = Member DependabilityM_D Member DependabilityC_D = Crossed Dependability
Come può nascere una situazione di crisi da sistemi perfettamente operanti
Caso operativo.Robot che svolge funzioni di manutenzionestradale entra, se non adeguatamente inserito in un
Crisi legata apotenziali collisioni degli obiettivi differenziati dei vari robot
contesto di socialdependability/standard di comunicazione/ standard di comunicazione sociale/regole di comportamento / ecc con robot
dei vari robot(alcuni proteggono gli uomini, altri avevano compiti di servizio e cosìvia). regole di comportamento / ecc… con robot
personali (ad esempio assistenzaciechi) che si trovano ad occupare il medesimo spazio nello stesso tempo.
)Concetto di condivisione dello spazio, tempoe condivisione o no dell’obiettivo.
Gli aspetti di collision avoidance potevano essere bypassati da variecircostanze (es: necessità di supportare l’uomo, cosa che determinava unche determinava unconflitto: il robot non valutava che l’effetto della collisione potevagenerare situazioni ancora più pericolose per l’uomo che non il lasciarlo dasolo) e quindi l’incidente era possibile. Applicazione della teoria dei giochicooperativa allo spazio aereo potrebbe risolvere quelcooperativa allo spazio aereo potrebbe risolvere quel particolare problema,ma forse non altri.
Conclusioni• Il mercato, specialmente della robotica di servizio, è in netta
espansionep• L’Italia ha una tradizione di tutto rilievo sulla robotica
industriale, un po’ meno nel service ove è leggermente in dritardo
• L’Italia ha una posizione accademica di primissimo piano• Vi sono spazi di espansione immensi pari a quelli degli• Vi sono spazi di espansione immensi, pari a quelli degli
smartphone, che vanno colti• Abbiamo e dobbiamo sfruttare la possibilità p• di operareENEA, insieme ad altri, sta l d bllavorando sui problemi dell’intelligenza di gruppo cooperativa e che potrebbe darecooperativa e che potrebbe dare un apporto di tecnologia e know‐how importante su temi specifici