Relazione di fine tirocinio scolastico mediante il ... · È stata fatta un’analisi agli...
27
1 Università degli Studi Roma Tre Dipartimento di Ingegneria Corso di laurea in Ingegneria Civile per la Protezione dai Rischi Naturali Relazione di fine tirocinio “Modellazione e analisi non lineare di un edificio scolastico mediante il software MIDAS GEN” Relatore: Candidato: Prof. Fabrizio Paolacci Carmine Ditella Matricola: 464971 Anno Accademico 2017/2018
Transcript of Relazione di fine tirocinio scolastico mediante il ... · È stata fatta un’analisi agli...

1
Università degli Studi Roma Tre
Dipartimento di Ingegneria
Corso di laurea in Ingegneria Civile per la Protezione dai Rischi Naturali
Relazione di fine tirocinio
“Modellazione e analisi non lineare di un edificio
scolastico mediante il software MIDAS GEN”
Relatore: Candidato:
Prof. Fabrizio Paolacci Carmine Ditella
Matricola:
464971
Anno Accademico 2017/2018

2
Indice
1 Premessa ............................................................................................................................. 3
2 Descrizione dell’edificio ...................................................................................................... 4
3 Valutazione dello stato di fatto........................................................................................... 6
4 Modellazione dell’edificio su MIDAS GEN .......................................................................... 8
4.1 Ipotesi .......................................................................................................................... 8
4.2 Elementi ....................................................................................................................... 9
4.3 Definizione dei materiali ............................................................................................ 10
4.4 Design armature ........................................................................................................ 11
4.5 Definizione dei Vincoli alla base ................................................................................ 13
5 Definizione dei carichi ....................................................................................................... 13
5.1 Carichi statici.............................................................................................................. 13
5.2 Spettri di Risposta ...................................................................................................... 14
6 Analisi Modale ................................................................................................................... 15
7 Analisi statica non lineare (Pushover)............................................................................... 16
7.1 La Curva di capacità ................................................................................................... 23
7.2 Verifiche duttili degli elementi e determinazione della PGA di capacità .................. 27

3
1 Premessa
La seguente relazione descrive le attività effettuate ai fini dello svolgimento del tirocinio
formativo, nel periodo tra marzo -maggio 2018.
Il lavoro svolto era finalizzato all’apprendimento e all’utilizzo del software di calcolo Midas-
Gen 2018.
La prima fase del tirocinio è stata dedicata all’interpretazione delle prove in situ effettuate da
alcuni colleghi presso l’istituto scolastico “G. Matteotti” con sede in Cave (RM). Da queste
prove sono stati estrapolati i dati relativi alle caratteristiche meccaniche dei materiali e, per
mezzo di rilievi geometrici e documentazione fornita dall’amministrazione comunale del
comune di Cave, si è definita la geometria della struttura in esame.
Lo step successivo è stato quello di interagire con il software MIDAS, per poter infine calcolare
la curva di capacità della struttura. I risultati ottenuti da queste attività sono propedeutiche al
lavoro di tesi, il cui obiettivo è la classificazione sismica del Corpo 3 (di seguito inquadrato)
ante e post intervento.

4
2 Descrizione dell’edificio
L’edificio oggetto di valutazione della vulnerabilità sismica è l’istituto G. Matteotti ubicato in
via Giacomo Matteotti 11, Cave (RM) avente struttura intelaiata in cemento armato ordinario.
Realizzato negli anni ’60, l’edificio è costituito da 5 corpi uniti tra loro mediante dei giunti. La
struttura, che poggia su un terreno a quote variabili, è composta da due piani fuori terra, in
cui si può trovare la scuola elementare, un piano entro terra, in cui si trova l’asilo nido; le
altezze medie
interpiano sono pari a 2.95 m e la copertura è di tipo a padiglione. L’altimetria media
dell’edificio può essere assunta pari a 400 m s.l.m.
Figura 1: Istituto G. Matteotti Cave dal satellite
Nelle figure seguenti si riporta la planimetria dell’edificio.

5
Figura 2:Planimetria piano terra e primo piano.
Come si può notare dalle figure precedenti l’intera struttura presenta evidenti caratteristiche
di irregolarità in pianta. Come si evince dai successivi prospetti, poiché il fabbricato poggia su
un terreno a quote variabili, la struttura presenta inoltre caratteristiche di irregolarità in
altezza.

6
3 Valutazione dello stato di fatto
In prima analisi sono state verificate le congruenze tra i dati reperiti nei sopralluoghi effettuati
da alcuni colleghi la documentazione ricevuta dall’amministrazione comunale.
La documentazione fornita è la seguente:
• Elaborati grafici dell’adeguamento copertura (gennaio 2017)
• Relazione di calcolo strutturale (2009)
• Schede di sintesi dei corpi strutturali (2009)
• Tavola inquadramento dell’area e rilievo architettonico (2009)
La documentazione non comprende il progetto esecutivo dell’epoca, pertanto fornisce
informazioni incomplete e non attendibili riguardo alcuni aspetti strutturali come:
• La classe di calcestruzzo: riportata nelle schede di sintesi del 2009 dopo un’indagine
sclerometrica, essa necessita ulteriori verifiche per accertare il suo valore;
• Le caratteristiche geometriche strutturali: risultano esserci delle incongruenze tra
l’elaborato grafico dell’adeguamento copertura (2017) e la tavola inquadramento
dell’area e rilievo architettonico (2009);
• La collocazione dei giunti tecnici: alcuni di essi sono assenti negli elaborati grafici;
• Le armature di pilastri e travi: negli elaborati non sono presenti informazioni relativi
ad esse;
• L’orditura dei solai: è riportata solo in alcune zone dell’edificio;
Nonostante le numerose lacune, è stato possibile rilevare gli aspetti principali relativi alla
geometria della struttura, tali caratteristiche sono state verificate in situ durante il primo
sopralluogo. Inoltre, si è provveduto all’individuazione visiva dei diversi corpi, uniti con dei
giunti tecnici, che compongono l’edificio.
Dalla analisi visiva dei giunti è stata confermata la presenza di 5 corpi, come riportato nelle
schede di sintesi.
Si illustra di seguito la divisione individuata:

7
Figura 3: Divisione dell'edificio in corpi di fabbrica.
Per le finalità del presente studio si è deciso di analizzare e modellare nel dettaglio il Corpo
n°3.

8
4 Modellazione dell’edificio su MIDAS GEN
La fase di calcolo viene svolta attraverso l’ausilio di un
software di calcolo strutturale. MIDAS Gen 2018 è un
codice di calcolo ad elementi finiti di tipo “general
pourpose” cioè un software che è stato pensato per
l’applicazione del metodo agli elementi finiti per una
vasta tipologia di problemi, disponendo di una ampia
libreria di elementi finiti, di tipologie di materiale e avendo implementato all’interno un’ampia
gamma di analisi. Il software MIDAS Gen 2018 è un programma commerciale e, come tale,
possiede una qualità superiore nella gestione grafica sia per il pre-processamento, che per il
post-processamento. L’utilizzo del software risulta agevolato anche dal Tree menu, il quale
mostra in maniera schematica i passi da seguire per definire qualsiasi caso di studio.
Figura 4: Menù ad albero di Midas Gen 2018.
4.1 Ipotesi
Nella schematizzazione dell’edificio sono state introdotte alcune ipotesi, ossia:
• trascurare gli elementi non strutturali: vengono considerati come non strutturali (e
perciò non vengono modellati) le tramezze interne, le tamponature esterne con
un’alta percentuale di foratura;
• considerare ciascun impalcato come infinitamente rigido nel proprio piano; questo
può considerarsi vero qualora la rigidezza flessionale dell’impalcato sia infinitamente
più grande di quella degli elementi portanti verticali;

9
• considerare la struttura incastrata al piede e trascurando le interazioni col terreno; tale
ipotesi è accettabile se la rigidezza degli elementi di fondazione è maggiore di quella
di travi e pilastri, cosa facilmente verificabile nel caso di elementi verticali molto snelli.
4.2 Elementi
La struttura portante dell’edificio è costituita da pilastri, travi e tamponature considerate, per
il caso in esame, “resistenti. Gli elementi che compongono il telaio in cemento armato
vengono rappresentati con elementi beam, in grado di reagire alle sollecitazioni assiali,
flettenti e di taglio. I pilastri e le travi sono stati considerati in asse. Per quanto riguarda i
pannelli di tamponatura, questi sono stati modellati
attraverso elementi beam aventi rigidezza flessionale e a taglio nulla (si è fatto anche il
confronto con
4elementi truss).
Figura 5: Modello Struttura Corpo 3.
10
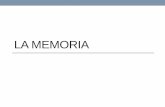
4.3 Definizione dei materiali
I materiali implementati nel software, ricavati dai dati provenienti da indagini in situ e
documentazione fornita dall’amministrazione sono i seguenti:
• Calcestruzzo: C12/15
• Acciaio armatura: UNI FeB32k
• Tamponatura: Muratura in mattoni semipieni
Figura 6: Definizione dei materiali.
11
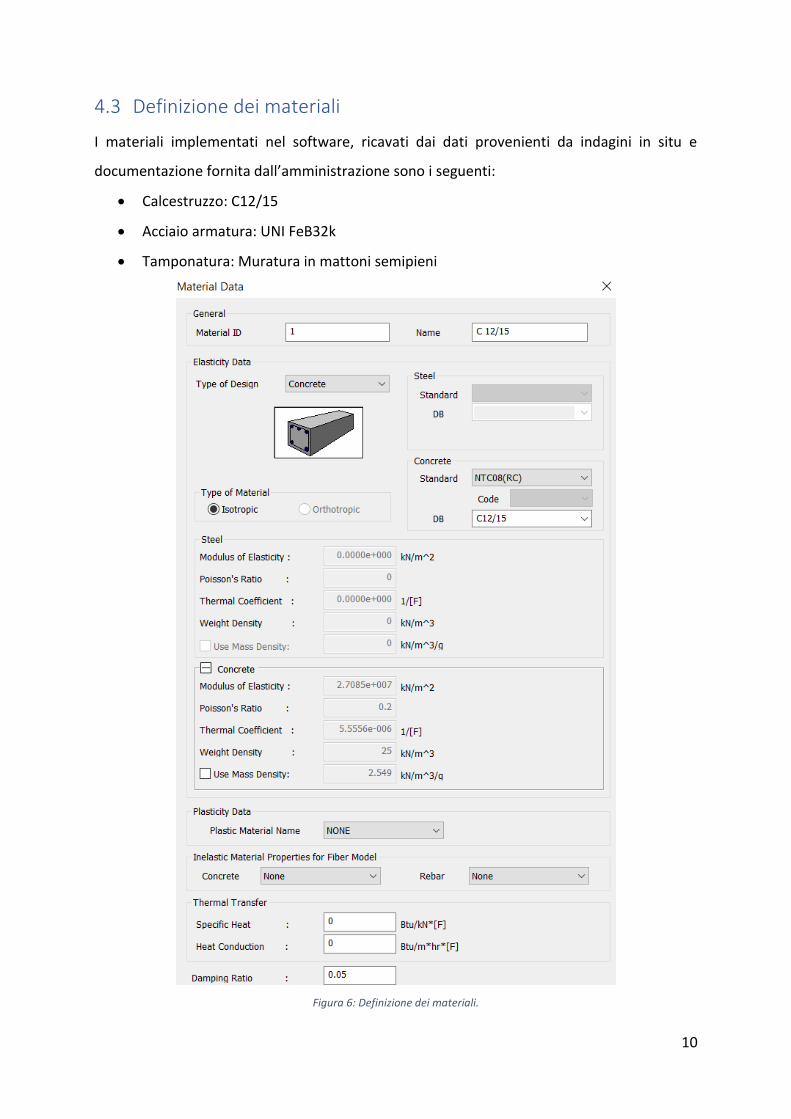
Figura 7: Definizione standards armature.
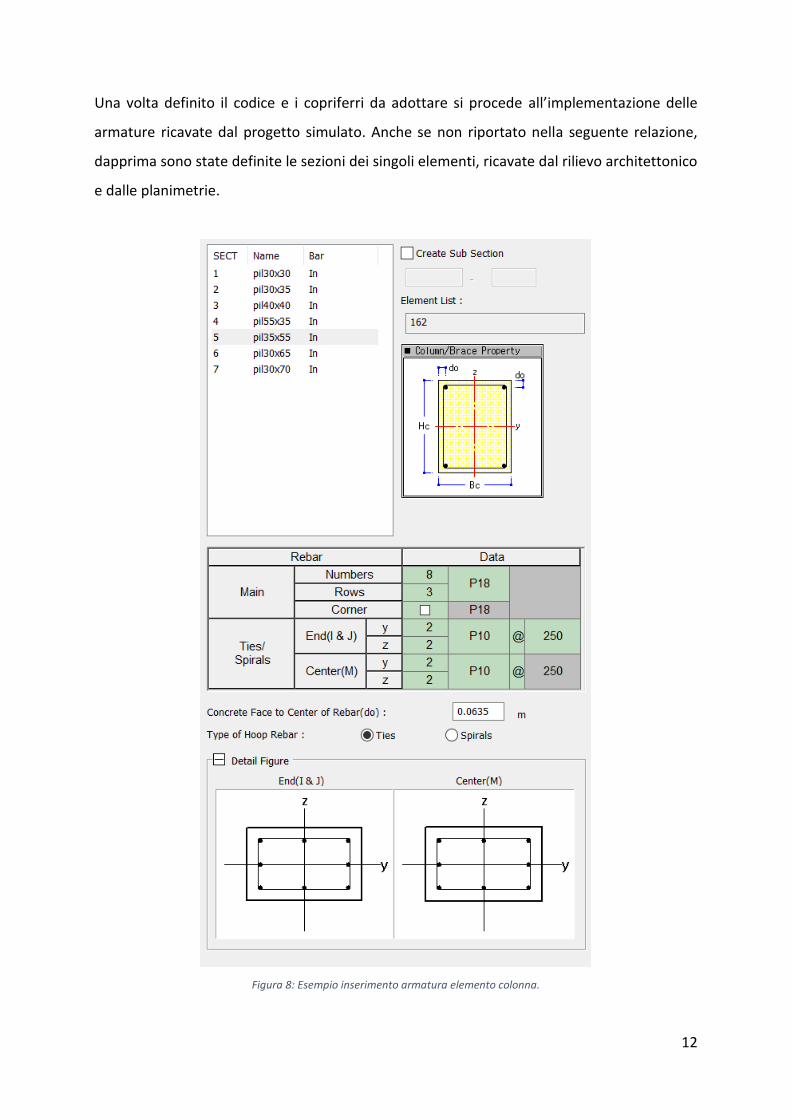
4.4 Design armature
Il design delle armature viene compiuto dopo aver definito le membrature, orizzontali e
verticali, e le specifiche necessarie per un progetto ottimale.
Il primo passo per la generazione delle armature è la definizione dei diametri e dei passi da
utilizzare nel design. Diametri e passi vanno identificati per elementi beam, column, wall e
brace.
Inoltre, in input va inserito il copriferro scelto, in funzione della classe di esposizione in cui si
trova il fabbricato. Il valore inserito in input deve tener conto anche del diametro della barra
di armatura, in quanto tale valore è misurato a partire dal centro della barra, e non dalla
superficie esterna.
12
Una volta definito il codice e i copriferri da adottare si procede all’implementazione delle
armature ricavate dal progetto simulato. Anche se non riportato nella seguente relazione,
dapprima sono state definite le sezioni dei singoli elementi, ricavate dal rilievo architettonico
e dalle planimetrie.
Figura 8: Esempio inserimento armatura elemento colonna.

13
4.5 Definizione dei Vincoli alla base
Il vincolo sovrastruttura-fondazione, è stato considerato come incastro perfetto.
Figura 9: Boundary – Define support.
5 Definizione dei carichi
5.1 Carichi statici
Conclusasi la modellazione geometrica e la definizione dei materiali, si passa alla definizione
dei carichi statici agenti, calcolati secondo Normativa. Una volta definiti i carichi, si è
proceduto all’assegnazione.
Figura 10: Definizione dei carichi statici.
14
Figura 11: Carichi di piano.
Figura 12: Peso tamponatura.
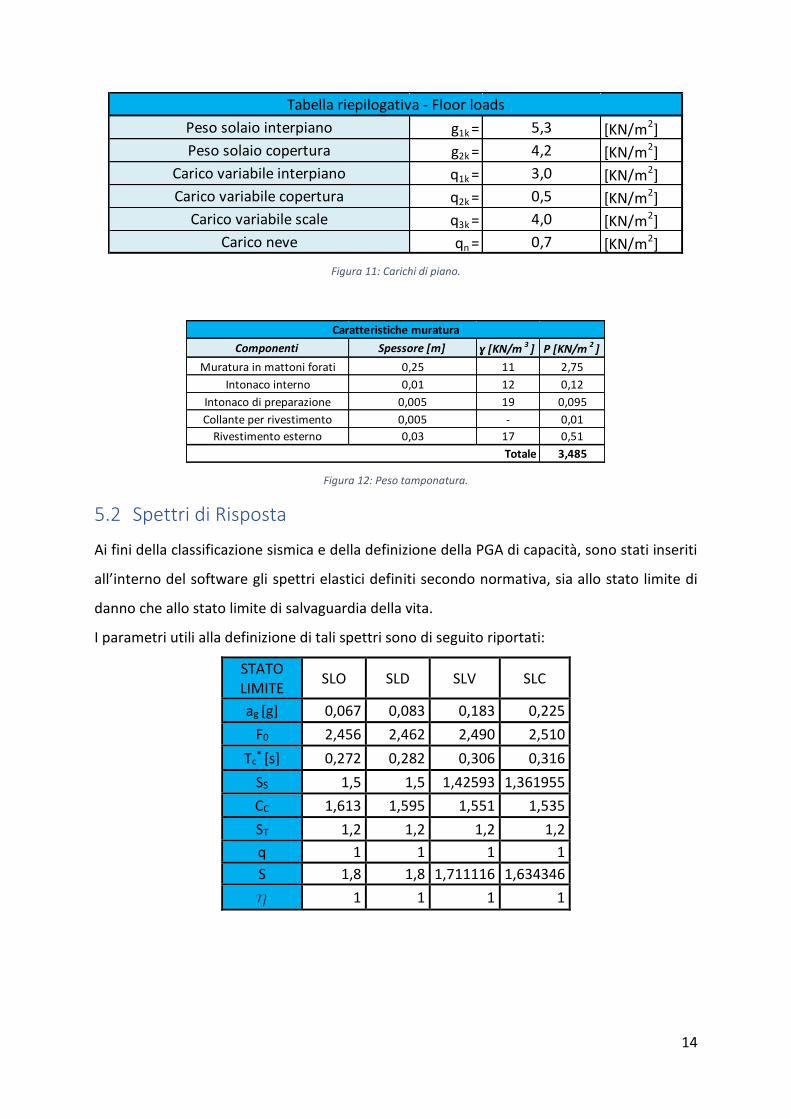
5.2 Spettri di Risposta
Ai fini della classificazione sismica e della definizione della PGA di capacità, sono stati inseriti
all’interno del software gli spettri elastici definiti secondo normativa, sia allo stato limite di
danno che allo stato limite di salvaguardia della vita.
I parametri utili alla definizione di tali spettri sono di seguito riportati:
STATO LIMITE
SLO SLD SLV SLC
ag [g] 0,067 0,083 0,183 0,225
F0 2,456 2,462 2,490 2,510
Tc* [s] 0,272 0,282 0,306 0,316
SS 1,5 1,5 1,42593 1,361955
CC 1,613 1,595 1,551 1,535
ST 1,2 1,2 1,2 1,2
q 1 1 1 1
S 1,8 1,8 1,711116 1,634346
h 1 1 1 1
Peso solaio interpiano g1k = 5,3 [KN/m2]
Peso solaio copertura g2k = 4,2 [KN/m2]
Carico variabile interpiano q1k = 3,0 [KN/m2]
Carico variabile copertura q2k = 0,5 [KN/m2]
Carico variabile scale q3k = 4,0 [KN/m2]
Carico neve qn = 0,7 [KN/m2]
Tabella riepilogativa - Floor loads
Componenti Spessore [m] ɣ [KN/m 3 ] P [KN/m 2 ]
Muratura in mattoni forati 0,25 11 2,75
Intonaco interno 0,01 12 0,12
Intonaco di preparazione 0,005 19 0,095
Collante per rivestimento 0,005 - 0,01
Rivestimento esterno 0,03 17 0,51
3,485
Caratteristiche muratura
Totale

15
Figura 13: Inserimento spettri elastici su Midas.
6 Analisi Modale
Naturalmente alla base del calcolo pushover stà l’analisi dinamica della struttura con la quale
determinare i suoi modi propri di vibrare. In particolare in questo caso è importante che i modi
siano tra di loro disaccoppiati e ben delineati in senso traslazionale nelle due direzioni in modo
da poter applicare il metodo. Se ci sono dei modi torsionali come primo modo allora l’analisi
non si può applicare. Almeno il 75% della massa deve essere eccitata nella direzione che poi
considero nell’analisi pushover (vedi punto 7.3.4 di normativa).
È stata fatta un’analisi agli autovettori con il metodo di Lacnzos.
Figura 14: Definizione parametri analisi modale.
16
7 Analisi statica non lineare (Pushover)
Questa procedura nasce principalmente per valutare le prestazioni antisismiche di una
struttura esistente andando a valutare le risorse plastiche alle quali l’edificio è in grado di
attingere una volta superato il limite elastico. Lo scopo è quello di sapere a quale cinematismo
di collasso l’edificio andrà incontro nel caso di crollo sismico. Dunque, il metodo prevede prima
l’applicazione dei carichi verticali che rappresentano uno scenario pre-sisma, successivamente
si procede con la spinta orizzontale, definita opportunamente secondo Normativa, in combo
con la combinazione sismica dei carichi verticali.
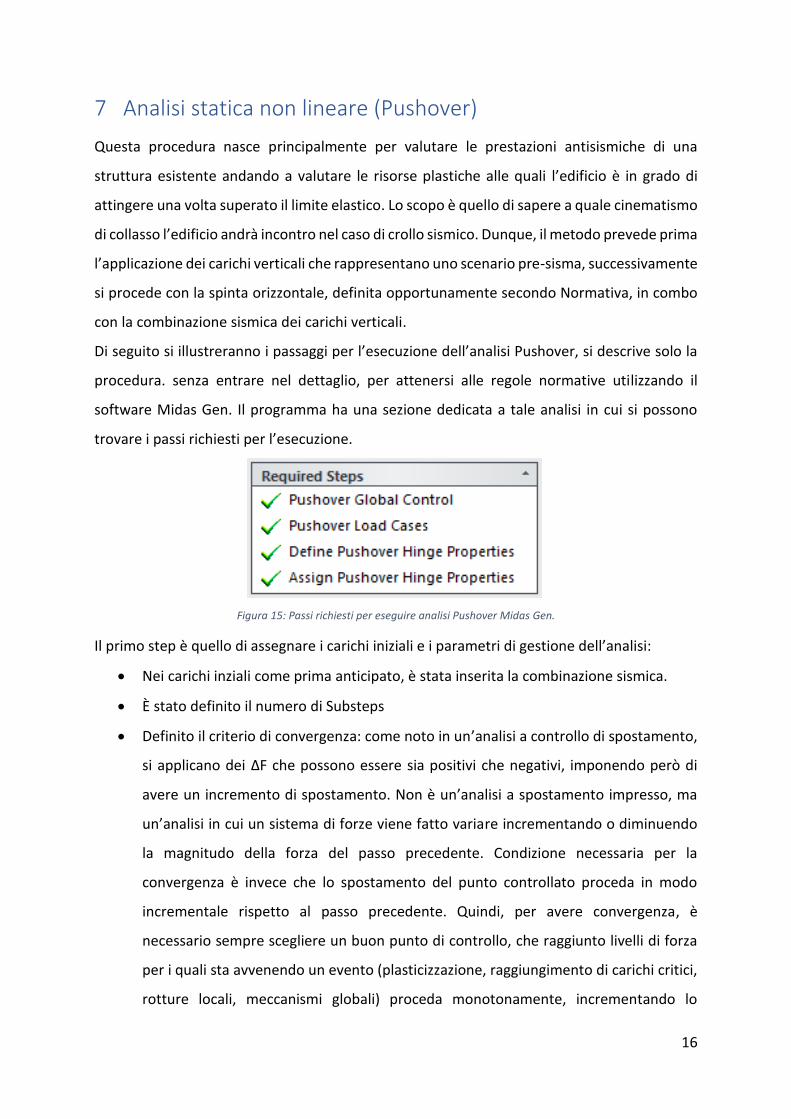
Di seguito si illustreranno i passaggi per l’esecuzione dell’analisi Pushover, si descrive solo la
procedura. senza entrare nel dettaglio, per attenersi alle regole normative utilizzando il
software Midas Gen. Il programma ha una sezione dedicata a tale analisi in cui si possono
trovare i passi richiesti per l’esecuzione.
Figura 15: Passi richiesti per eseguire analisi Pushover Midas Gen.
Il primo step è quello di assegnare i carichi iniziali e i parametri di gestione dell’analisi:
• Nei carichi inziali come prima anticipato, è stata inserita la combinazione sismica.
• È stato definito il numero di Substeps
• Definito il criterio di convergenza: come noto in un’analisi a controllo di spostamento,
si applicano dei ΔF che possono essere sia positivi che negativi, imponendo però di
avere un incremento di spostamento. Non è un’analisi a spostamento impresso, ma
un’analisi in cui un sistema di forze viene fatto variare incrementando o diminuendo
la magnitudo della forza del passo precedente. Condizione necessaria per la
convergenza è invece che lo spostamento del punto controllato proceda in modo
incrementale rispetto al passo precedente. Quindi, per avere convergenza, è
necessario sempre scegliere un buon punto di controllo, che raggiunto livelli di forza
per i quali sta avvenendo un evento (plasticizzazione, raggiungimento di carichi critici,
rotture locali, meccanismi globali) proceda monotonamente, incrementando lo

17
spostamento nella direzione e nel verso dei passi precedenti. In questo tipo di analisi,
si possono percorrere rami discendenti.
Figura 16: Controllo globale analisi Pushover Midas Gen.
Successivamente si definiscono dei casi di carico, assegnando:
• il n° di passi di suddivisione della spinta
• il criterio di controllo che può essere per spostamento o per carico
• il nodo di controllo scelto in copertura in prossimità del baricentro di piano
• il sistema di spinta

18
Per il caso in esame si esamina il sistema di spinta proporzionale alle masse di piano, detto
Uniform Acceleration.
Figura 17: Casi di carico analisi Pushover MidasGen
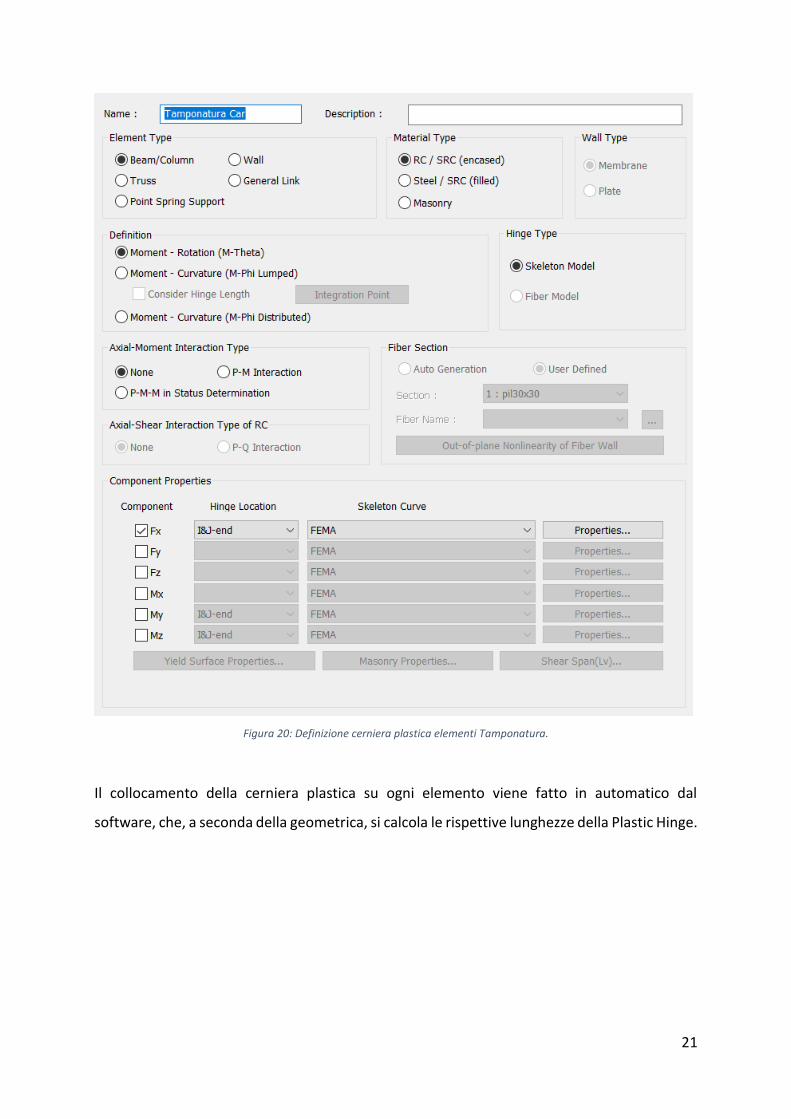
Successivamente vengono definite le non linearità del singolo elemento mediante la
caratterizzazione delle cerniere plastiche. Per le proprietà della cerniera plastica, il software
le calcola in automatico, facendo riferimento all’EC8. È stato però necessario intervenire sulla

19
definizione delle cerniere plastiche riguardanti gli elementi biella, simboleggianti la
tamponatura, andando a definire un comportamento di resistenza a sola compressione.
Figura 18: Definizione cerneira plastica elementi trave.

20
Figura 19: Definizione cerniera plastica elementi colonna.
21
Figura 20: Definizione cerniera plastica elementi Tamponatura.
Il collocamento della cerniera plastica su ogni elemento viene fatto in automatico dal
software, che, a seconda della geometrica, si calcola le rispettive lunghezze della Plastic Hinge.

22
Infine, si può procedere con l’assegnazione delle proprietà delle cerniere plastiche con i
rispettivi elementi.
Figura 21: Simbologia Plastic Hinges.
Una volta definiti tutti i parametri è stato possibile avviare l’analisi di PushOver.

23
7.1 La Curva di capacità
Dopo aver eseguito tutti i passaggi richiesti, si può procedere con la lettura della curva di
capacità che rappresenta la storia di danneggiamento della struttura. Nella curva suddetta
possiamo osservare 3 tratti distinti:
• Tratto della curva rettilineo ad esplicare il comportamento elastico della struttura
• A valle della formazione della prima cerniera plastica, inizia il ramo plastico della curva.
• Tratto discendente della curva, a sottolineare la formazione di un cinematismo di
collasso della struttura.
Queste tre fasi possono essere caratterizzate da un passaggio graduale o repentino a seconda
delle risorse duttili della struttura.
Nel caso in esame, il caso di carico è stato quello di applicare una spinta proporzionale alle
masse di piano. La denominazione dell’analisi è Acceleration X.
Figura 22: Curva di capacità con forze proporzionali al primo modo di vibrare.

24
Il metodo per confrontare la domanda con la capacità a cui si fa riferimento è quello descritto
nell’Eurocodice 8, al quale la normativa italiana consente di far rifermento e che a sua volta si
basa sul metodo N2. Tale metodo si basa sull’assunzione di base che un sistema MDOF possa
essere correlato alla risposta di un sistema equivalente SDOF.
Scelto un punto rappresentativo della struttura, generalmente coincidente con il baricentro
dell’ultimo piano dell’edificio, le forze sono scalate, mantenendo invariati i rapporti relativi fra
le stesse, in modo da far crescere monotonamente lo spostamento orizzontale del punto di
controllo fino ad un valore “sufficiente”, tale che, una volta calcolata la domanda in
spostamento, questa sia compresa nella curva di pushover così ottenuta.
L’analisi richiede poi che al sistema strutturale reale sia associato un sistema strutturale
equivalente ad un grado di libertà.
La forza F* e lo spostamento d* del sistema equivalente sono legati alle corrispondenti
grandezze Fb e db del sistema reale MDOF dalle relazioni:
Il passaggio dal sistema reale MDOF al sistema SDOF è caratterizzato dal fattore di
partecipazione modale Γ:
Essendo:
• φ: forma del modo principale di vibrare normalizzato ponendo dc= 1
• M: matrice delle masse del sistema reale
• T: vettore di trascinamento corrispondente alla direzione del sisma considerata
Figura 23: Bilinearizzazione della curva di capacità.

25
Alla curva di capacità del sistema equivalente occorre sostituire una curva bilineare avente un
primo tratto elastico ed un secondo tratto perfettamente plastico.
Si approssima quindi la curva caratteristica forza-spostamento (F* - d*) del sistema
equivalente con una bilineare definita in base al criterio di uguaglianza delle aree; tale
approssimazione permette di individuare un ramo elastico con pendenza k*.
Definita la resistenza massima del sistema strutturale reale ed Fbu* = Fbu / Γ la resistenza
massima del sistema equivalente, il tratto elastico si individua imponendone il passaggio per
il punto 0,6 ∗ Fbu* della curva di capacità del sistema equivalente, la forza di plasticizzazione
Fy* si individua imponendo l’uguaglianza delle aree sottese dalla curva bilineare e dalla curva
di capacità per lo spostamento massimo du* corrispondente ad una riduzione di resistenza ≤
0,15 Fbu*.
Il periodo proprio elastico del sistema bilineare è pari a:
Dove
• m∗ = φT M τ
• k* è la rigidezza del tratto elastico della bilineare
Se il sistema SDOF ha periodo proprio T* sufficientemente elevato (in particolare nelle norme
si richiede T* > TC), il massimo spostamento raggiunto dal sistema anelastico è pari a quello
di un sistema elastico con pari periodo, cioè:
Essendo il valore dello spostamento spettrale derivante da uno spettro di risposta elastico in
corrispondenza del periodo T*.
Se invece il sistema SDOF ha periodo proprio T* < TC, la risposta in spostamento del sistema
anelastico è maggiore di quella del corrispondente sistema elastico e risulta:
Essendo:

26
il rapporto tra la forza di risposta elastica e la forza di snervamento del sistema equivalente.
Se q∗ ≤ 1 allora si ha:
Figura 24:Valutazione dello spostamento ultimo.
Noto d∗ è possibile calcolare lo spostamento effettivo del punto di controllo del sistema MDOF
semplicemente invertendo:
essendo d*e,max lo spostamento massimo richiesto dall’evento sismico di progetto al sistema
reale MDOF. In questo modo è possibile convertire la risposta del sistema equivalente in
quella dell’edificio reale.
Nota la domanda di spostamento ∗ si può operare il confronto con lo spostamento disponibile
e verificare la prestazione strutturale. La verifica consiste nel controllare che lo spostamento
massimo disponibile sia superiore a quello richiesto ovvero:
Oppure:
Una volta noto lo spostamento del punto di controllo si conosce dall’analisi la configurazione
deformata ed è quindi possibile eseguire la verifica dell’edificio, in particolare controllando la
compatibilità degli spostamenti in quegli elementi che presentano un comportamento duttile
e delle resistenze in quegli elementi che hanno un comportamento fragile.

27
7.2 Verifiche duttili degli elementi e determinazione della PGA di
capacità
Si procede infine al calcolo della domanda per mezzo degli spettri di progetto caricati
precedentemente nella sezione Response Spectrum.
Con gli spettri scelti, il software MIDAS calcola, per i vari stati limite, la deformata della
struttura e dei singoli elementi.
Per trovare l’accelerazione di capacità si agisce in maniera iterativa scalando lo spettro di
domanda fino al soddisfacimento di tutte le verifiche duttili e fragili della struttura. Quando
con un determinato valore di domanda scalata si soddisfano tutte le rotazioni alla corda di
capacità (verifiche duttili) di tutti gli elementi, allora si è trovato lo spettro di capacità.