Analisi Modale dei Sistemi Lineari a Tempo Continuo.ppt ... · ANALISI MODALE DEI SISTEMI LINEARI A...
25
Teoria dei Sistemi - A.A. 2003/2004 Cristian Secchi Pag. 1 ANALISI MODALE DEI SISTEMI ANALISI MODALE DEI SISTEMI LINEARI A TEMPO CONTINUO LINEARI A TEMPO CONTINUO Dr. Cristian Secchi ARScontrol Lab Università di Modena e Reggio Emilia Il Il movimento movimento di di un un sistema sistema LTI LTI ⎩ ⎨ ⎧ + = + = ) ( ) ( ) ( ) ( ) ( ) ( t Du t Cx t y t Bu t Ax t x & τ τ τ ∫ − + = t t A At d Bu e x e t x 0 ) ( 0 ) ( ) ( Formula di Lagrange Analisi Modale -- 2 Cristian Secchi Controllo di Sistemi Robotici L L + + + + + = ! ! 2 2 2 n t A t A At I e n n At
Transcript of Analisi Modale dei Sistemi Lineari a Tempo Continuo.ppt ... · ANALISI MODALE DEI SISTEMI LINEARI A...

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 1
ANALISI MODALE DEI SISTEMI ANALISI MODALE DEI SISTEMI LINEARI A TEMPO CONTINUOLINEARI A TEMPO CONTINUO
Dr. Cristian SecchiARScontrol Lab
Università di Modena e Reggio Emilia
Il Il movimentomovimento didi un un sistemasistema LTILTI
⎩⎨⎧
+=+=
)()()()()()(tDutCxtytButAxtx&
τττ∫ −+=t
tAAt dBuexetx0
)(0 )()(Formula di Lagrange
Analisi Modale -- 2Cristian Secchi Controllo di Sistemi Robotici
LL +++++=!!2
22
ntAtAAtIe
nnAt

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 2
AnalisiAnalisi ModaleModale
• Il termine eAt ha un ruolo cruciale sia per la determinazione del movimento libero che di quello forzato
• L’obiettivo dell’analisi modale per un sistema lineare tempo invariante (LTI) è quello di scoprire qual è e da cosa dipende l’andamento del termine eAt ,
• Un’analisi accurata della struttura di tale termine porta una conoscenza profonda delle dinamiche intrinseche del sistema e di come tali dinamiche si combinano nella risposta libera e nella
Analisi Modale -- 3
risposta forzata
Cristian Secchi Controllo di Sistemi Robotici
I modi del sistemaI modi del sistema
Si consideri il sistema autonomo
)()( tAxtx =&
Il cui stato iniziale sia x(0)=x0
Il movimento (libero) del sistema è dato da:
)( xetx At=
Analisi Modale -- 4Cristian Secchi Controllo di Sistemi Robotici
0)( xetx =
Le funzioni elementari del tempo t che compaiono all’interno della matrice eAt prendono il nome di modi del sistema in esame.

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 3
Forma canonica di JordanForma canonica di Jordan
I modi di un sistema possono essere facilmente evidenziati tramite un cambio di base nello spazio degli stati che trasformi la matrice A nella corrispondente forma canonica di Jordan.
Sia A una matrice di stato n x n di un sistema LTI e siano λ λ gliSia A una matrice di stato n x n di un sistema LTI e siano λ1, …, λh gli autovalori distinti di A e siano r1, …, rh le loro rispettive molteplicità algebriche. Il polinomio caratteristico può cioè essere decomposto scritto come:
Analisi Modale -- 5Cristian Secchi
Esiste sempre una matrice quadrata di dimensione n non singolare T che porta la matrice A nella sua forma canonica di Jordan
xTx = ATTA 1−=
Forma canonica di JordanForma canonica di Jordan
La forma canonica di Jordan della matrice A è:
⎥⎥⎥⎤
⎢⎢⎢⎡
== − JJ
ATTA0000
2
1
1
MMMM
L
L
ad ogni autovalore distinto λi corrisponde un blocco di Jordan di dimensione ri:
dim Ji=ri
⎥⎥
⎦⎢⎢
⎣ hJ000MMMM
Analisi Modale -- 6Cristian Secchi
i ii=1,…,h

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 4
Forma canonica di JordanForma canonica di Jordan
Ogni blocco di Jordan è una matrice diagonale a blocchi ed è formato da qi miniblocchi di Jordan:
d i li h di i
Analisi Modale -- 7Cristian Secchi
ognuno dei quali ha dimensione νi,j e:
• Si determinano i qi autovettori distinti associati all’autovalore λirisolvendo:
Procedura per determinare la matrice TProcedura per determinare la matrice T
0)( , =− jii vAIλ iqj ,,1K=
• Nel caso in cui si abbia qi<ri è necessario procedere, per ogni autovettori vi,j, alla determinazione della corrispondente catena vi,j
(k)
di autovettori generalizzati k=1,…,νi,j .Tali catene si determinano risolvendo “iterativamente” tale sistema:
, j iqj
⎪⎧ ==− ,
)1(,
)2(,)( jijijii vvvAIλ
Analisi Modale -- 8Cristian Secchi
⎪⎪
⎩
⎪⎪
⎨
=−
=−
− )(,
)(,
)2(,
)3(,
,,,
1,,)(
)(
)(
jijijijii
jijii
jijijii
vvAI
vvAI
ννλ
λ
M

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 5
• La matrice T ha come colonne le catene di autovettori generalizzati
Procedura per determinare la matrice TProcedura per determinare la matrice T
]|,,,|[ )(,
)2(,
)1(,
, LKL jijijiji vvvT ν=
Analisi Modale -- 9Cristian Secchi
Proprietà dell’esponenziale di matriceProprietà dell’esponenziale di matrice
L’esponenziale di matrice gode delle seguenti utili proprietà:
• Sia T una matrice non singolare; allora:
• L’esponenziale di una matrice diagonale a blocchi è una matrice diagonale a blocchi in cui ciascun blocco è l’esponenziale del blocco della matrice di partenza:
Analisi Modale -- 10Cristian Secchi

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 6
Movimento libero di sistemi LTIMovimento libero di sistemi LTI
Dato il sistema autonomo
)()( tAxtx =&
e la trasformazione:
per cui la matrice di stato nelle nuove coordinate è in forma di Jordan
)()( tAxtx =
xTx =
Analisi Modale -- 11Cristian Secchi
per cui la matrice di stato nelle nuove coordinate è in forma di Jordan, abbiamo che il movimento libero x(t) è dato da:
01
0)( xTTexetx tAAt −==
Movimento libero di sistemi LTIMovimento libero di sistemi LTI
Siccome è in forma canonica di Jordan
0000
0000
2
12
1
ee
tJ
tJt
JJ
⎥⎥⎥⎥⎤
⎢⎢⎢⎢⎡
⎥⎥⎤
⎢⎢⎡ L
MMMM
L
L
quindi, per calcolare il movimento libero, è sufficiente saper calcolare l’esponenziale del generico miniblocco di Jordan di dimensione ν
⎞⎛λ 0001
01
01000
000
00)(
2
xT
e
eTxTTetx
tJ
J
h
h −−⎥⎥⎦⎢
⎢⎣
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
==MMMM
L
Analisi Modale -- 12Cristian Secchi
NIJ +=
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
= λ
λλ
λλ
λ
00001000
000000100001
L
L
MMMMMM
L
L
L

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 7
• La matrice N, che ha tutti gli elementi nulli tranne quelli nella sopradiagonale che valgono 1, è una matrice nilpotente di ordine ν
Movimento libero di sistemi LTIMovimento libero di sistemi LTI
0=νN Ndim=ν
• L’esponenziale di un miniblocco di Jordan si calcola come:
NttNtIttNIJt Ieeeeee λλλ === + )(
∑∑−∞
==1ν
λλ nn
tnn
t NteNte
Analisi Modale -- 13Cristian Secchi
∑∑== 00 !! nn
Nn
eNn
e
⎥⎦
⎤⎢⎣
⎡−
++++= −−
11
22
)!1(!2ν
νλ
νNtNttNIe t L
Movimento libero di sistemi LTIMovimento libero di sistemi LTI
⎟⎟⎞
⎜⎜⎛
−−
−−
)!1()!2(!3!21
1232
Ltttttνν
νν
⎟⎟⎟⎟⎟⎟⎟⎟
⎜⎜⎜⎜⎜⎜⎜⎜
−=
−
100)!2(!2
10
)()(22
MMMMMMM
MML
ML
t
tttee tJt ν
ν
λ
Analisi Modale -- 14Cristian Secchi
⎟⎟
⎠⎜⎜
⎝ 10000010000
L
L t

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 8
Movimento libero di sistemi LTIMovimento libero di sistemi LTI
All’espressione “quasi diagonale” che caratterizza la forma canonica di Jordan, si giunge sempre, anche nel caso vi siano autovalori complessi coniugati. In questo caso, però, i blocchi della forma di Jordan contengono dei termini complessi e, pertanto, il loro utilizzo risulta molto g p , p ,poco intuitivo nell’analisi dei sistemi LTI e del loro movimento.
Per ovviare questo inconveniente, nel caso di autovalori complessi coniugati, si applica una trasformazione nello spazio degli stati che porta la matrice in forma di Jordan ad avere sulla diagonale principale dei blocchi reali di dimensione 2.
Analisi Modale -- 15Cristian Secchi
Si consideri, ad esempio, una matrice A di dimensione 6 caratterizzata da una coppia di autovalori complessi coniugati λ1,2=σ±jω di molteplicità 3. Siano v1, v2, v3 gli autovettori associati a un autovalore e e v1
*, v2*,v3
* gli autovettori complessi coniugati associati al suo complesso coniugato.
Movimento libero di sistemi LTIMovimento libero di sistemi LTI
Applicando la trasformazione di coordinate:
xTx = [ ]*3
*2
*1321 vvvvvvT =
Si ottiene la forma di Jordan della matrice A:
Analisi Modale -- 16Cristian Secchi
Si ottengono cioè due blocchi di Jordan ciascuno costituito da un solo miniblocco di dimensione 3

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 9
Movimento libero di sistemi LTIMovimento libero di sistemi LTI
Si indichi con vi,R e vi,I rispettivamente la parte reale e la parte complessa dell’autovettore complesso i-esimo (i=1,2,3). Utilizzando la seguente trasformazione di coordinate:
è possibile trasformare la matrice A nelle seguente forma canonica “reale” di Jordan:
xTx ~~ =
xTx ~~= [ ]IRIRIR vvvvvvT ,3,3,2,2,1,1~ =
Analisi Modale -- 17Cristian Secchi
Movimento libero di sistemi LTIMovimento libero di sistemi LTI
In tal modo è possibile esprimere il movimento libero di sistemi LTI come combinazione lineare di soli termini reali. Infatti:
occorre però dare una formula per l’esponenziale della matrice
E’ possibile mostrare che, nell’esempio considerato:
Analisi Modale -- 18Cristian Secchi

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 10
Modi di un sistemaModi di un sistema
Le funzioni del tempo t che compaiono che compaiono nella matrice eJit
sono detti modi del sistema relativi all’autovalore associato a Ji
Analisi Modale -- 19Cristian Secchi
Le funzioni del tempo t che compaiono nelle matrici eJit, i=1,…, h, cioè nella matrice sono dette modi del sistema.
Combinazione dei modi di un sistemaCombinazione dei modi di un sistema
Il movimento libero può pertanto essere decomposto in h sotto-movimenti liberi:
Analisi Modale -- 20Cristian Secchi

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 11
Combinazione dei modi di un sistemaCombinazione dei modi di un sistema
Il movimento di un sistema libero è la combinazione lineare dei modi del sistema. I coefficienti con cui i modi sono combinati sono dati da:
1) Lo stato iniziale1) Lo stato iniziale
2) La matrice T
Lo studio dell’andamento dei modi di un sistema ci consente di legare il tipo di andamento del movimento libero agli autovalori della matrice di
’ b l l l b d l
)()( txTtx =
Analisi Modale -- 21Cristian Secchi
stato. E’ pertanto possibile caratterizzare il movimento libero del sistema dal semplice studio degli autovalori della matrice di stato e della loro molteplicità.
Analisi modale Analisi modale –– Autovalori reali distintiAutovalori reali distinti
Nel caso in cui gli autovalori della matrice di stato siano tutti reali e distinti, necessariamente la forma di Jordan è una matrice diagonale:
La matrice di transizione dello stato è, quindi:
Analisi Modale -- 22Cristian Secchi

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 12
Analisi modale Analisi modale –– Autovalori reali distintiAutovalori reali distinti
I modi del sistema sono dati dalle seguenti funzioni:
5.0=λ 0=λ 5.0−=λ
Analisi Modale -- 23Cristian Secchi
Analisi modale Analisi modale –– Autovalori complessi distintiAutovalori complessi distinti
Nel caso in cui gli autovalori della matrice di stato siano complessi coniugati e distinti, del tipo λi=σi ± ωi la matrice di transizione dello stato:
Analisi Modale -- 24Cristian Secchi
I modi del sistema sono dati dalle seguenti funzioni:

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 13
Analisi modale Analisi modale –– Autovalori complessi distintiAutovalori complessi distinti
eσtcos(ωt) dove λ1,2=0.5 ± 2j
x
Analisi Modale -- 25Cristian Secchi Controllo di Sistemi Robotici
x
Analisi modale Analisi modale –– Autovalori complessi distintiAutovalori complessi distinti
eσtcos(ωt) dove λ1,2=± 2j
x
x
Analisi Modale -- 26Cristian Secchi Controllo di Sistemi Robotici

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 14
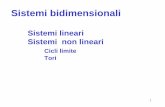
Analisi modale Analisi modale –– Autovalori complessi distintiAutovalori complessi distinti
eσtcos(ωt) dove λ1,2=-0.5 ±2j
x
Analisi Modale -- 27Cristian Secchi Controllo di Sistemi Robotici
x
Analisi modale Analisi modale –– Autovalori reali multipliAutovalori reali multipli
Nel caso di autovalori multipli, la matrice di transizione dello stato è data da:
dove:
Analisi Modale -- 28Cristian Secchi

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 15
Analisi modale Analisi modale –– Autovalori reali multipliAutovalori reali multipli
In questo caso i modi del sistema sono:
Analisi Modale -- 29Cristian Secchi
Analisi modale Analisi modale –– Autovalori reali multipliAutovalori reali multipli
Si consideri, ad esempio, il sistema in forma di Jordan con autovalore λ di molteplicità 2:
Il movimento libero del sistema è dato da:
Analisi Modale -- 30Cristian Secchi
Analizziamo i due modi del sistema:

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 16
Analisi modale Analisi modale –– Autovalori reali multipliAutovalori reali multipli
Autovalore doppio λ=0 modi m1 e m2
Autovalore doppio λ=-0.5 modi m1 e m2
Analisi Modale -- 31Cristian Secchi Controllo di Sistemi Robotici
Analisi modale Analisi modale –– Autovalori complessi multipliAutovalori complessi multipli
Analogamente al caso di autovalori complessi coniugati multipli, i modi associati agli autovalori complessi coniugati multipli del tipo σ ± jωsono:
Analisi Modale -- 32Cristian Secchi
Dove ν è la dimensione del miniblocco di Jordan associato alla coppia di autovalori complessi coniugati.

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 17
Analisi modale Analisi modale –– Autovalori complessi multipliAutovalori complessi multipli
Consideriamo un sistema con una coppia di autovalori complessi coniugati σ ± jω doppia. I modi relativi alla coppia sono
Analisi Modale -- 33Cristian Secchi
Analizziamo l’andamento della coppia di modi m1(t) e m3(t). L’andamento dell’altra coppia di modi è analogo.
Analisi modale Analisi modale –– Autovalori complessi multipliAutovalori complessi multipli
Autovalore doppio λ=-0.5 ± 2j modi m1 e m3
Autovalore doppio λ=±2j modi m1 e m3
Analisi Modale -- 34Cristian Secchi Controllo di Sistemi Robotici

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 18
Analisi modale Analisi modale
In un generico sistema LTI possono essere presenti tutti i tipi di autovalori analizzati finora. Pertanto, il movimento libero del sistema è dato, in generale, dalla combinazione lineare di tutti i tipi di modi visti finora.
Analisi Modale -- 35Cristian Secchi
Carattere di convergenza dei modiCarattere di convergenza dei modi
Consideriamo un sistema LTI. Diremo che un modo m(t), definito per t¸0 è:
• convergente se:g
• limitato, ma non convergente se esiste un numero reale 0<M<1 tale che 8 t ¸ 0 si abbia:
Analisi Modale -- 36Cristian Secchi
• non limitato (o divergente) se:

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 19
Carattere di convergenza dei modiCarattere di convergenza dei modi
Dall’analisi modale fatta, segue la seguente:
Proposizione: I modi del sistema sono:
• convergenti se e solo se tutti gli autovalori di A hanno parte reale negativa• limitati se e solo se gli autovalori di A hanno parte reale negativa o nulla e quelli a parte reale nulla sono associati a miniblocchi di Jordan di dimensione 1
è
Analisi Modale -- 37Cristian Secchi
• non limitati se almeno un autovalore di A è a parte reale positiva oppure a parte reale nulla ma associato a un miniblocco di Jordan di dimensione maggiore di 1.
• I modi sono una proprietà intrinseca del sistema
• Il loro andamento può essere dedotto da una semplice analisi degli
ConsiderazioniConsiderazioni
autovalori della matrice di stato
• Dai modi del sistema dipende sia l’andamento del movimento libero che il transitorio del movimento forzato
• Nel caso di sistemi SISO rappresentati da funzioni di trasferimento i poli sono un sottoinsieme degli autovalori del sistema e, pertanto, il
Analisi Modale -- 38
poli sono un sottoinsieme degli autovalori del sistema e, pertanto, il tipo di transitorio della risposta può essere dedotto dalla posizione e dalla molteplicità dei poli
Cristian Secchi

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 20
EsempioEsempio
Dato il sistema: A
Calcolare l’uscita libera del sistema a partire dallo stato iniziale
C
Analisi Modale -- 39Cristian Secchi
p
EsempioEsempio
L’uscita libera è data da:
Per poter calcolare l’esponenziale di matrice, porto la matrice di stato nella forma canonica di Jordan. Gli autovalori della matrice di stato sono le soluzioni di:
Analisi Modale -- 40Cristian Secchi

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 21
EsempioEsempio
Gli autovettori corrispondenti a λ1=1 si determinano risolvendo:
0)( 1 =− vAIλ 0011011
=⎥⎥⎤
⎢⎢⎡−
−v)( 1
000 ⎥⎥⎦⎢
⎢⎣
Si ottengono due autovettori linearmente indipendenti:
⎥⎤
⎢⎡1
⎥⎤
⎢⎡0
Analisi Modale -- 41Cristian Secchi
⎥⎥⎥
⎦⎢⎢⎢
⎣
=011v
⎥⎥⎥
⎦⎢⎢⎢
⎣
=102v
EsempioEsempio
Gli autovettori corrispondenti a λ2=-1 si determinano risolvendo:
0)( 2 =− vAIλ 0011011
=⎥⎥⎤
⎢⎢⎡
−−−−
v)( 2
200 ⎥⎥⎦⎢
⎢⎣ −
Si ottiene un autovalore:
⎥⎥⎤
⎢⎢⎡−= 11
3v
Analisi Modale -- 42Cristian Secchi
⎥⎥⎦⎢
⎢⎣ 0
13v

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 22
EsempioEsempio
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−==010101
101
321 vvvT
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=−
0505010005.05.0
1T⎥⎦⎢⎣ 010 ⎥⎦⎢⎣ − 05.05.0
Facendo il cambio di variabile:
xTx =
Analisi Modale -- 43Cristian Secchi
Le matrici A e C vengono trasformate in:
xTx
EsempioEsempio
Forma canonica di Jordan di A
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡== −
100010001
1ATTA
Il movimento libero del sistema è dato da:
⎥⎦⎢⎣ −100
[ ]012== CTC
Analisi Modale -- 44Cristian Secchi
01
0)()( xTTexTetxTtx tAtA −===

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 23
EsempioEsempio
Utilizzando i dati del problema:
e
Analisi Modale -- 45Cristian Secchi
EsempioEsempio
E quindi l’uscita libera vale:
Analisi Modale -- 46Cristian Secchi

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 24
ConclusioniConclusioni
• L’analisi modale consente di ricavare le dinamiche fondamentali di un sistema LTI da una semplice analisi degli autovalori
• La forma canonica di Jordan consente di calcolare agevolmente quali sono i modi di un sistema
• Partendo dalla conoscenza dei modi del sistema è possibile capire quale sarà il transitorio di un movimento oppure il movimento libero
Analisi Modale -- 47Cristian Secchi Controllo di Sistemi Robotici
ANALISI MODALE DEI SISTEMI ANALISI MODALE DEI SISTEMI LINEARI A TEMPO CONTINUOLINEARI A TEMPO CONTINUO
Dr. Cristian SecchiARScontrol Lab
Università di Modena e Reggio Emilia

Teoria dei Sistemi - A.A. 2003/2004
Cristian Secchi Pag. 25
EsempioEsempio
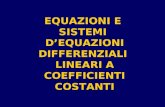
Si consideri un sistema massa-molla-smorzatore
k m
x1 x2u
y
b
Analisi Modale -- 49Cristian Secchi
y
EsempioEsempio
Scegliendo come variabili di stato per descrivere il sistema la posizione della massa (x1)e la sua velocità (x2), il sistema è descritto da:
Analisi Modale -- 50Cristian Secchi