SISTEMI LINEARI QUADRATI: METODI ITERATIVI
54
SISTEMI LINEARI QUADRATI: METODI ITERATIVI CALCOLO NUMERICO e PROGRAMMAZIONE SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.1/54
Transcript of SISTEMI LINEARI QUADRATI: METODI ITERATIVI
SISTEMI LINEARI QUADRATI:METODI ITERATIVI
CALCOLO NUMERICO e PROGRAMMAZIONE
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.1/54
RICHIAMI di ALGEBRA LINEAREDEFINIZIONI
A ∈ Rn×n simmetrica se A = AT ;
A ∈ Cn×n Hermitiana se A = A∗, dove A∗ = (aj,i) i=1,...,nj=1,...,n
;
A ∈ Rn×n ortogonale se AT A = I;
A ∈ Cn×n (simmetrica) unitaria se A∗A = I;
A ∈ Rn×n (simmetrica) definita positiva se xT Ax > 0, ∀x 6= 0;
A ∈ Cn×n (hermitiana) definita positiva se x∗Ax > 0, ∀x 6= 0;
A diagonale dominante in senso forte[debole] se
|ai,i| >
n∑
j=1
j 6=i
|ai,j |,
|ai,i| ≥
n∑
j=1
j 6=i
|ai,j |
i = 1, . . . , n
A diagonale dominante se
|ai,i| ≥n
∑
j=1
j 6=i
|ai,j |, i = 1, . . . , n, ed ∃k : |ak,k| >
n∑
j=1
j 6=k
|ak,j |
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.2/54
RICHIAMI di ALGEBRA LINEARETEOREMASe A ∈ Rn×n è simmetrica, sono equivalenti:
1. A definita positiva;
2. gli autovalori di A sono reali e positivi;
3. i determinanti dei minori principali di A verificano: det(Ak) > 0, k = 1, . . . , n
(criterio di Sylvester).
L’algebra lineare numerica richiede spazi lineari normati
ESEMPIO: Si consideri il sistema lineare
8 1 1
1 5 −1
1 −1 5
x1
x2
x3
=
26
7
7
la cui soluzione e x = [3, 1, 1]T . Si supponga di aver ottenuto le seguenti approssimazioni della
soluzione: v = [2.9997675, 1.0002365, 1.0003005]T
z = [3.0002725, 0.9996165, 0.9995525]T
Come possiamo stabilire quale delle due grandezze e piu vicina alla soluzione del sistema?
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.3/54
Norma di vettoreDefinizione: Sia X spazio lineare e f : X → R funzionale tale che
1. f(x) ≥ 0, ∀x ∈ X, f(x) = 0 ⇔ x = 0;
2. f(x + y) ≤ f(x) + f(y), ∀x, y ∈ X;
3. f(αx) = |α|f(x), ∀α ∈ R(C), ∀x ∈ X;
X è detto spazio lineare normato (sln) e f è detta norma.In particolare per X = Rn si usano le norme p o Hölderiane:
‖x‖p := (|x1|p + |x2|p + · · · + |xn|p)1
p
‖x‖1 := |x1| + |x2| + · · · + |xn|
‖x‖2 :=√
x21 + x2
2 + · · · + x2n
‖x‖∞ := max{|x1|, |x2|, . . . , |xn|}
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.4/54
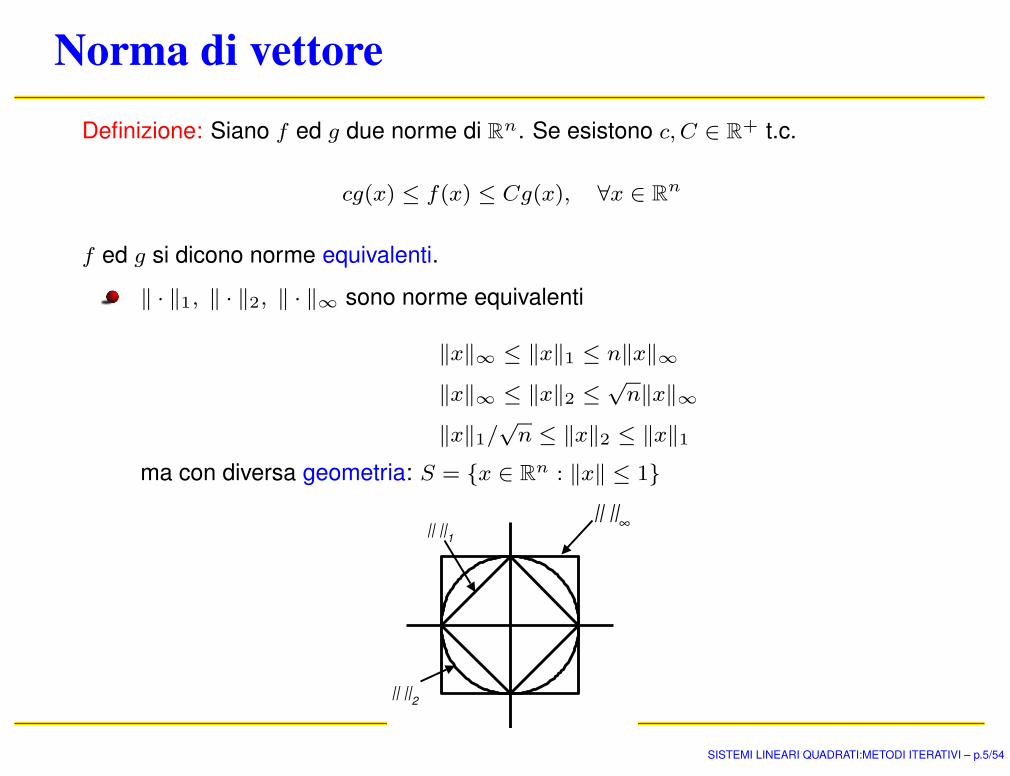
Norma di vettore
Definizione: Siano f ed g due norme di Rn. Se esistono c, C ∈ R+ t.c.
cg(x) ≤ f(x) ≤ Cg(x), ∀x ∈ Rn
f ed g si dicono norme equivalenti.
‖ · ‖1, ‖ · ‖2, ‖ · ‖∞ sono norme equivalenti
‖x‖∞ ≤ ‖x‖1 ≤ n‖x‖∞‖x‖∞ ≤ ‖x‖2 ≤
√n‖x‖∞
‖x‖1/√
n ≤ ‖x‖2 ≤ ‖x‖1
ma con diversa geometria: S = {x ∈ Rn : ‖x‖ ≤ 1}
|| ||1
|| ||2
|| ||∞
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.5/54
Norma di matrici in Rn×n
Definizione: Sia ‖ · ‖Rn una norma vettoriale. ‖ · ‖Rn×n si dice compatibile o
consistente con ‖ · ‖Rn se ∀A, B ∈ Rn×n e ∀x ∈ Rn si ha
‖Ax‖Rn ≤ ‖A‖Rn×n‖x‖Rn
‖AB‖Rn×n ≤ ‖A‖
Rn×n‖B‖Rn×n
Definizione: Sia ‖ · ‖Rn×n compatibile, si dice indotta da ‖ · ‖Rn se ∀A ∈ Rn×n
∃x ∈ Rn t.c.
‖Ax‖Rn = ‖A‖Rn×n‖x‖Rn
Definizione: Sia data ‖ · ‖Rn norma vettoriale, il funzionale ‖ · ‖ : Rn×n → R t.c.
‖A‖ := supx6=0
‖Ax‖Rn
‖x‖Rn
= max‖x‖Rn=1
‖Ax‖Rn
è una norma, norma naturale
Ogni norma naturale è indotta:sia y : ‖Ay‖ = max‖x‖=1 ‖Ax‖ ⇒ ‖Ay‖ = ‖A‖ = ‖A‖‖y‖
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.6/54
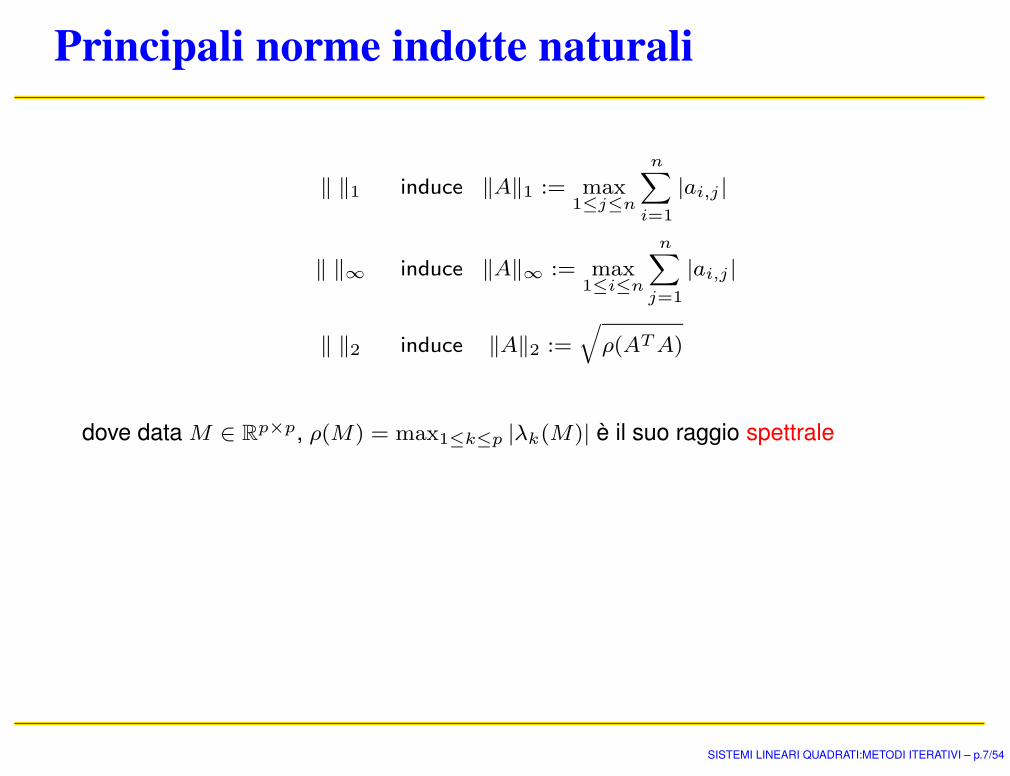
Principali norme indotte naturali
‖ ‖1 induce ‖A‖1 := max1≤j≤n
n∑
i=1
|ai,j |
‖ ‖∞ induce ‖A‖∞ := max1≤i≤n
n∑
j=1
|ai,j |
‖ ‖2 induce ‖A‖2 :=√
ρ(AT A)
dove data M ∈ Rp×p, ρ(M) = max1≤k≤p |λk(M)| è il suo raggio spettrale
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.7/54

Proprietà delle norme naturali
Sia M ∈ Rp×p
ρ(M) = inf{‖M‖ : ∀‖ · ‖ norma naturale}
ovvero ∀ε > 0, ∃‖ · ‖ norma naturale t.c ρ(M) ≤ ‖M‖ ≤ ρ(M) + ε, ne segue
∀M ∈ Rp×p, ∀‖ · ‖ norma naturale,
ρ(M) ≤ ‖M‖
Una matrice M ∈ Rp×p si dice convergente se limk→∞ Mk = 0
Teorema
M convergente ⇔ ρ(M) < 1
Invarianza della norma rispetto a trasformazioni ortogonali:
x ∈ Rn, U ∈ Rn×n ortogonale: ‖x‖2 = ‖Ux‖2
A ∈ Rm×n, U ∈ Rm×m, V ∈ Rn×n ortogonali: ‖A‖2 = ‖UAV ‖2
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.8/54
SISTEMI LINEARI QUADRATI
Sia A ∈ Rn×n, b ∈ Rn, se det A 6= 0 allora ∃!x ∈ Rn t.c.
Ax = b.
Molti modelli matematici significativi sono di tipo lineare
Sistemi lineari nascono da contesti diversi, è importante disporre di un ampiavarietà di algoritmi in modo da scegliere il più adatto al problema specifico(stabilità, occupazione di memoria, velocità)
I metodi per i sistemi lineari si dividono in due gruppi:
Metodi diretti: si basano sull’idea di trasformare il sistema attraverso unnumero finito di operazioni in un sistema equivalente di cui siaesplicitamente calcolabile la soluzione. In assenza di errori diarrotondamento forniscono la soluzione esatta.
Metodi iterativi: la soluzione è ottenuta come limite di una successione.Permettono di sfruttare la sparsità della matrice dei coeffcienti in quanto alcontrario dei metodi diretti, tale matrice non viene modificata
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.9/54
CondizionamentoDato Ax = b si vuol studiare come varia la soluzione del sistema al variare deidati(A, b).
Si studia il caso in cui solo il termine noto viene modificato. Si esprime laperturbazione sui dati con δb ∈ Rn e siano x e x + δx rispettivamente lesoluzioni di
Ax = b, A(x + δx) = b + δb
sottraendo i due sistemi
Aδx = δb ⇒ δx = A−1δb
da cui rispetto ad una norma naturale:
‖δx‖ ≤ ‖A−1‖ ‖δb‖
Poichè ‖b‖ = ‖Ax‖ ≤ ‖A‖ ‖x‖ ne segue 1/‖x‖ ≤ ‖A‖/‖b‖ e quindi
‖δx‖‖x‖ ≤ ‖A−1‖‖A‖‖δb‖
‖b‖
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.10/54
CondizionamentoConsideriamo il caso in cui la matrice A venga perturbata, si esprimeεδA ∈ Rn×n la perturbazione di A e εδb ∈ Rn quella di b (ε ∈ R positivo esufficientemente piccolo). Si risolve il sistema
(A + εδA)x(ε) = b + εδb; (1)
con x(0) = x. Se det A 6= 0 allora per ε “piccolo” det(A + εδA) 6= 0; posso ricavare
x(ε) = (A + εδA)−1(b + εδb)
funzione di ε derivabile in un intorno dell’origine.Derivando (1) rispetto a ε si ha
δAx(ε) + (A + εδA)x(ε) = δb;
per ε = 0 : δAx(0) + Ax(0) = δb da cui x(0) = A−1(δb − δAx(0)).Sviluppando in serie x(ε) = x(0) + εx(0) + O(ε2) ⇒ x(ε) − x(0) ' εx(0) da cui
‖x(ε) − x(0)‖‖x(0)‖ ' ‖εx(0)‖
‖x(0)‖ = ε‖A−1(δb − δAx(0))‖
‖x(0)‖
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.11/54
Condizionamento
‖x(ε) − x(0)‖‖x(0)‖ ≤ ε
‖A−1‖‖δb − δAx(0)‖‖x(0)‖
≤ ε‖A−1‖( ‖δb‖‖x(0)‖ + ‖δA‖
)
= ε‖A−1‖‖A‖( ‖δb‖‖A‖‖x‖ +
‖δA‖‖A‖
)
≤ ‖A−1‖‖A‖(‖εδb‖
‖b‖ +‖εδA‖‖A‖
)
≤ κ(A)
(
ε‖δb‖‖b‖ + ε
‖δA‖‖A‖
)
κ(A) := ‖A−1‖‖A‖: numero di condizionamento (‖ · ‖ qualsiasi normanaturale)
‖x(ε) − x‖‖x‖ ≤ κ(A)
(
ε‖δb‖‖b‖ + ε
‖δA‖‖A‖
)
Il rapporto tra l’errore relativo sui risultati e l’errore relativo sui dati risultaminore o uguale di κ(A)
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.12/54
Condizionamento: proprietà
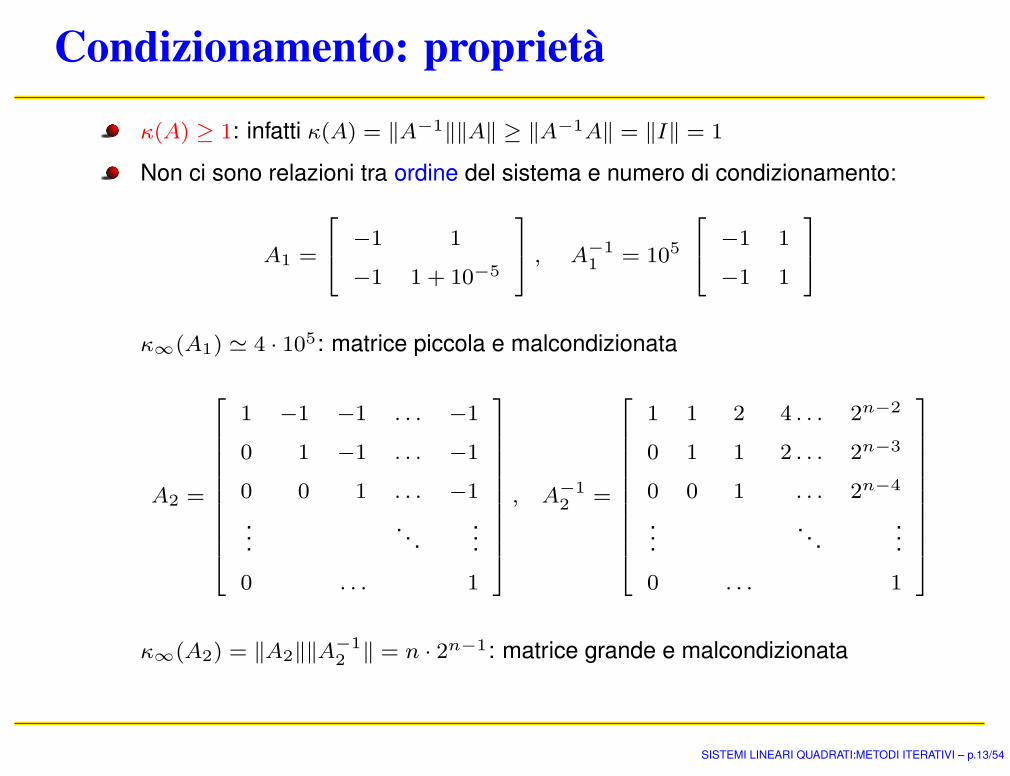
κ(A) ≥ 1: infatti κ(A) = ‖A−1‖‖A‖ ≥ ‖A−1A‖ = ‖I‖ = 1
Non ci sono relazioni tra ordine del sistema e numero di condizionamento:
A1 =
−1 1
−1 1 + 10−5
, A−11 = 105
−1 1
−1 1
κ∞(A1) ' 4 · 105: matrice piccola e malcondizionata
A2 =
1 −1 −1 . . . −1
0 1 −1 . . . −1
0 0 1 . . . −1
.... . .
...
0 . . . 1
, A−12 =
1 1 2 4 . . . 2n−2
0 1 1 2 . . . 2n−3
0 0 1 . . . 2n−4
.... . .
...
0 . . . 1
κ∞(A2) = ‖A2‖‖A−12 ‖ = n · 2n−1: matrice grande e malcondizionata
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.13/54
Condizionamento: proprietà
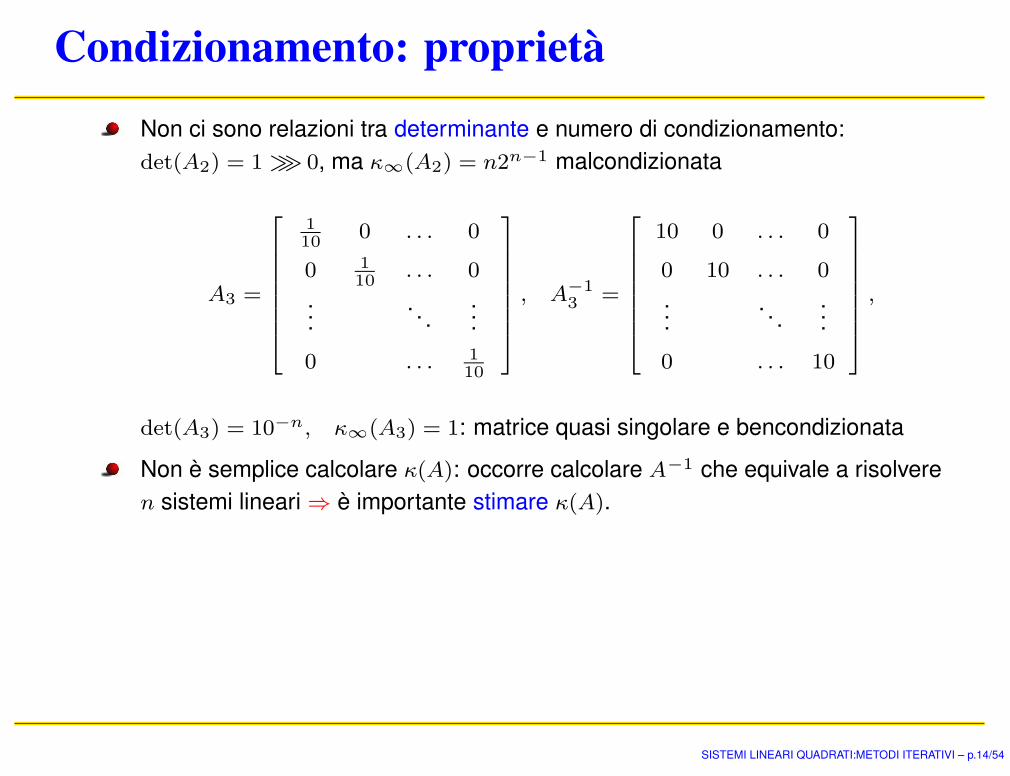
Non ci sono relazioni tra determinante e numero di condizionamento:det(A2) = 1 ≫ 0, ma κ∞(A2) = n2n−1 malcondizionata
A3 =
110
0 . . . 0
0 110
. . . 0
.... . .
...
0 . . . 110
, A−13 =
10 0 . . . 0
0 10 . . . 0
.... . .
...
0 . . . 10
,
det(A3) = 10−n, κ∞(A3) = 1: matrice quasi singolare e bencondizionata
Non è semplice calcolare κ(A): occorre calcolare A−1 che equivale a risolveren sistemi lineari ⇒ è importante stimare κ(A).
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.14/54
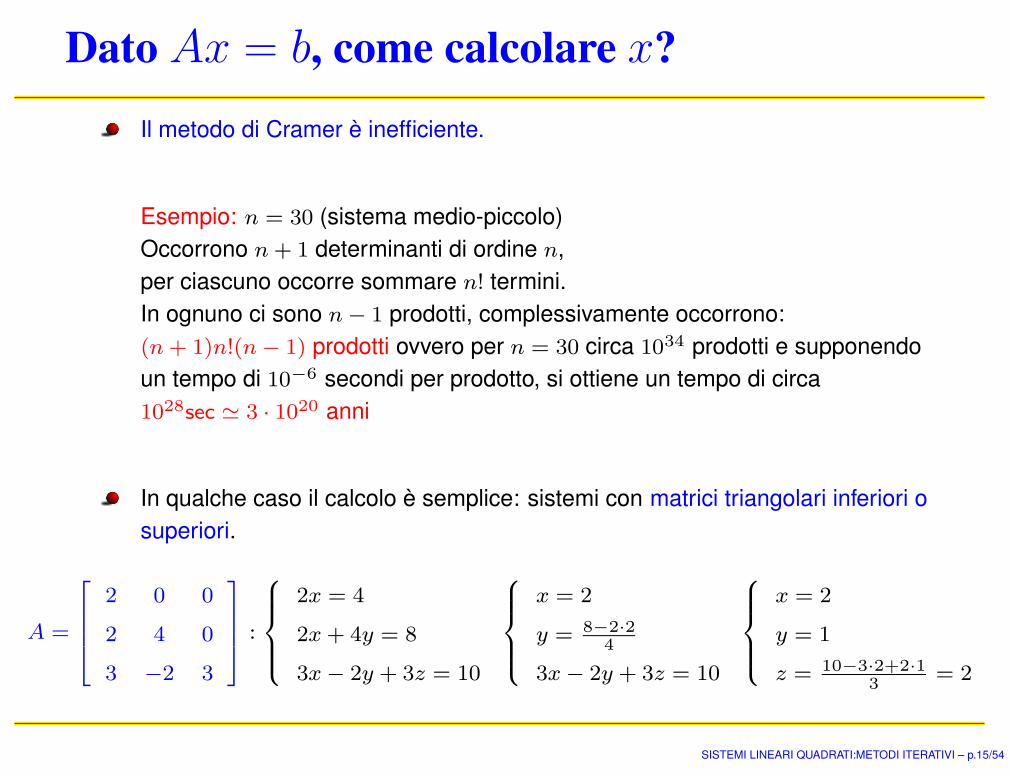
Dato Ax = b, come calcolare x?
Il metodo di Cramer è inefficiente.
Esempio: n = 30 (sistema medio-piccolo)Occorrono n + 1 determinanti di ordine n,per ciascuno occorre sommare n! termini.In ognuno ci sono n − 1 prodotti, complessivamente occorrono:(n + 1)n!(n − 1) prodotti ovvero per n = 30 circa 1034 prodotti e supponendoun tempo di 10−6 secondi per prodotto, si ottiene un tempo di circa1028sec ' 3 · 1020 anni
In qualche caso il calcolo è semplice: sistemi con matrici triangolari inferiori osuperiori.
A =
2 0 0
2 4 0
3 −2 3
:
2x = 4
2x + 4y = 8
3x − 2y + 3z = 10
x = 2
y = 8−2·24
3x − 2y + 3z = 10
x = 2
y = 1
z = 10−3·2+2·13
= 2
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.15/54
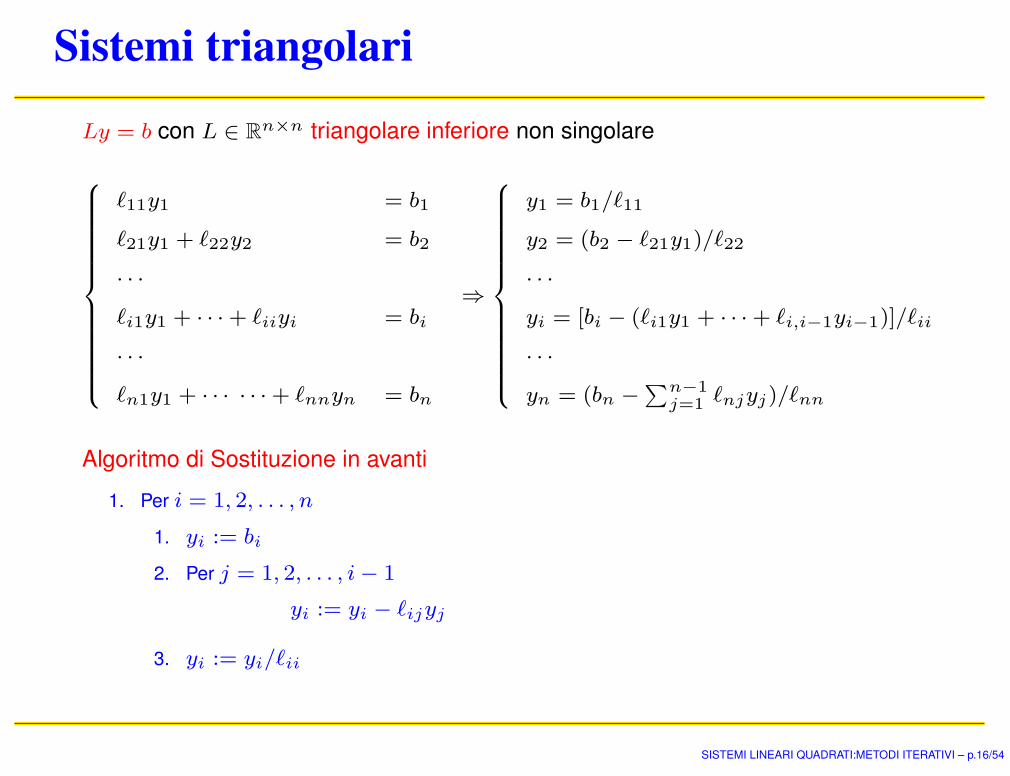
Sistemi triangolari
Ly = b con L ∈ Rn×n triangolare inferiore non singolare
`11y1 = b1
`21y1 + `22y2 = b2
· · ·`i1y1 + · · · + `iiyi = bi
· · ·`n1y1 + · · · · · · + `nnyn = bn
⇒
y1 = b1/`11
y2 = (b2 − `21y1)/`22
· · ·yi = [bi − (`i1y1 + · · · + `i,i−1yi−1)]/`ii
· · ·yn = (bn − ∑n−1
j=1 `njyj)/`nn
Algoritmo di Sostituzione in avanti
1. Per i = 1, 2, . . . , n
1. yi := bi
2. Per j = 1, 2, . . . , i − 1
yi := yi − `ijyj
3. yi := yi/`ii
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.16/54
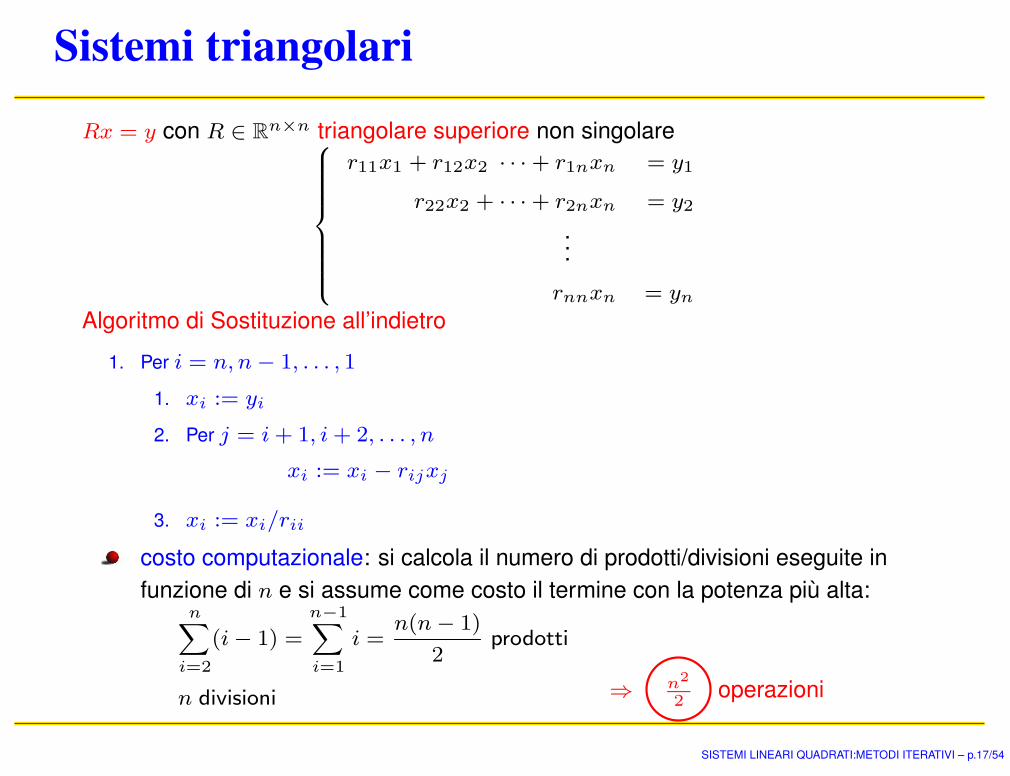
Sistemi triangolari
Rx = y con R ∈ Rn×n triangolare superiore non singolare
r11x1 + r12x2 · · · + r1nxn = y1
r22x2 + · · · + r2nxn = y2
...
rnnxn = yn
Algoritmo di Sostituzione all’indietro
1. Per i = n, n − 1, . . . , 1
1. xi := yi
2. Per j = i + 1, i + 2, . . . , n
xi := xi − rijxj
3. xi := xi/rii
costo computazionale: si calcola il numero di prodotti/divisioni eseguite infunzione di n e si assume come costo il termine con la potenza più alta:
n∑
i=2
(i − 1) =
n−1∑
i=1
i =n(n − 1)
2prodotti
n divisioni ⇒ n2
2operazioni
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.17/54
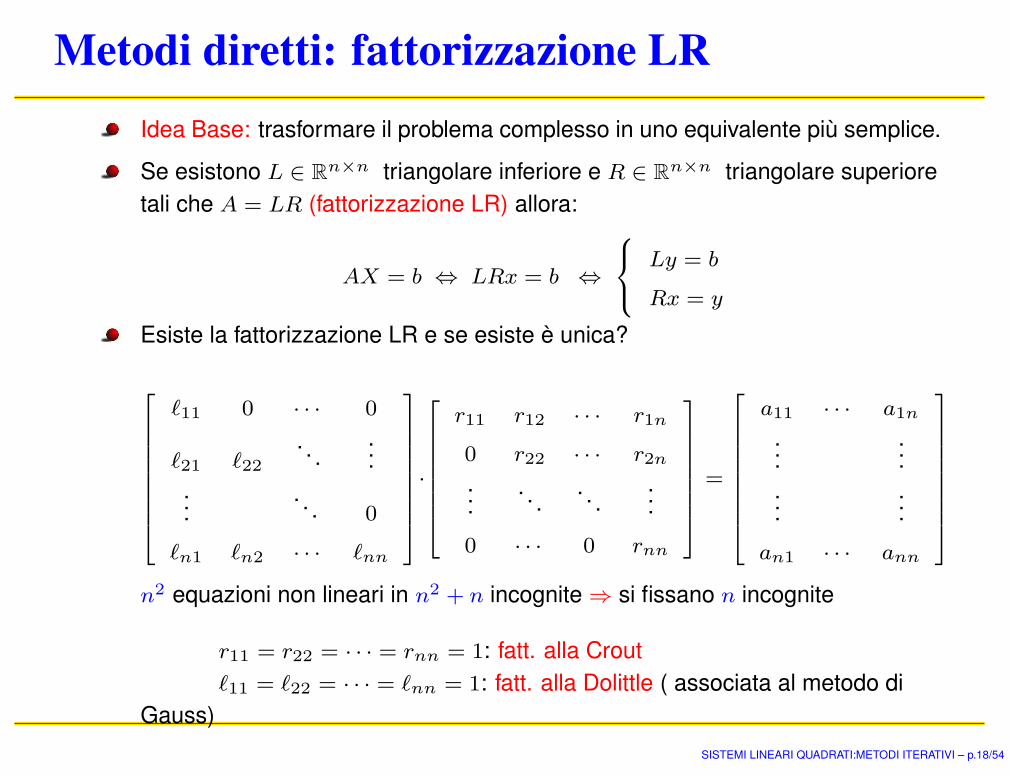
Metodi diretti: fattorizzazione LRIdea Base: trasformare il problema complesso in uno equivalente più semplice.
Se esistono L ∈ Rn×n triangolare inferiore e R ∈ Rn×n triangolare superioretali che A = LR (fattorizzazione LR) allora:
AX = b ⇔ LRx = b ⇔
Ly = b
Rx = y
Esiste la fattorizzazione LR e se esiste è unica?
`11 0 · · · 0
`21 `22. . .
......
. . . 0
`n1 `n2 · · · `nn
·
r11 r12 · · · r1n
0 r22 · · · r2n
.... . .
. . ....
0 · · · 0 rnn
=
a11 · · · a1n
......
......
an1 · · · ann
n2 equazioni non lineari in n2 + n incognite ⇒ si fissano n incognite
r11 = r22 = · · · = rnn = 1: fatt. alla Crout`11 = `22 = · · · = `nn = 1: fatt. alla Dolittle ( associata al metodo di
Gauss)SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.18/54
Metodi iterativiNei metodi diretti la presenza di eventuali elementi nulli nella matrice non puòessere sfruttata ai fini di ridurre in il costo computazionale sia l’occupazione dimemoria ( aspetti significativi per sistemi di grandi dimensioni)
infatti la trasformazione di A può introdurre un numero diverso da zero laddoveprima c’era uno zero (fill in)
I metodi iterativi sono utili per la risoluzione di sistemi lineari di grandidimensioni con matrici A sparse ( il numero degli elementi non nulli èdell’ordine di n)
Dato il sistema lineare
Ax = b, A ∈ Rn×n, b ∈ R
n
con soluzione x∗ ∈ Rn, si vuol costruire partendo, da un x(0) ∈ Rn assegnato, unasuccessione {x(k)} tale che
(1) x(k) → x∗
(2) x(k) facile e non dispendioso da costruire
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.19/54

Metodi iterativi
ESEMPIO: Assegnato x(0) ∈ Rn
METODO di JACOBI (o spostamenti simultanei)
x(k+1)i =
1
aii
bi −n
∑
j=1,j 6=i
aijx(k)j
aii 6= 0
METODO di GAUSS-SEIDEL (o spostamenti successivi)
x(k+1)i =
1
aii
bi −i−1∑
j=1,j 6=i
aijx(k+1)j −
n∑
j=i+1,j 6=i
aijx(k)j
aii 6= 0
si può notare che nella prima sommatoria si usano le componenti “nuove” delvettore
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.20/54
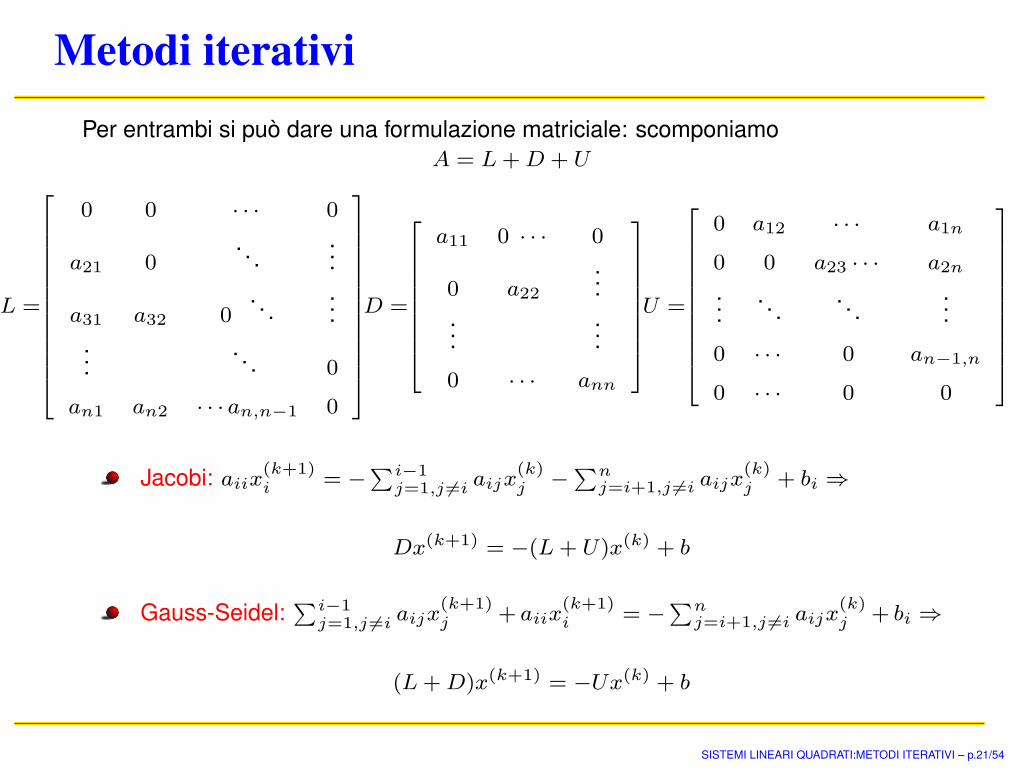
Metodi iterativiPer entrambi si può dare una formulazione matriciale: scomponiamo
A = L + D + U
L =
0 0 · · · 0
a21 0. . .
...
a31 a32 0. . .
......
. . . 0
an1 an2 · · · an,n−1 0
D =
a11 0 · · · 0
0 a22
......
...
0 · · · ann
U =
0 a12 · · · a1n
0 0 a23 · · · a2n
.... . .
. . ....
0 · · · 0 an−1,n
0 · · · 0 0
Jacobi: aiix(k+1)i = −∑i−1
j=1,j 6=iaijx
(k)j − ∑n
j=i+1,j 6=i aijx(k)j + bi ⇒
Dx(k+1) = −(L + U)x(k) + b
Gauss-Seidel:∑i−1
j=1,j 6=iaijx
(k+1)j + aiix
(k+1)i = −∑n
j=i+1,j 6=i aijx(k)j + bi ⇒
(L + D)x(k+1) = −Ux(k) + b
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.21/54
Metodi iterativiJacobi e Gauss-Seidel sono casi particolari di “splitting” di A: si cercano duematrici M ,N , con M non singolare tali che
A = M − N
da cuiAx = b ⇔ (M − N)x = b ⇔ Mx = Nx + b ⇔ x = M−1Nx + M−1b
Si ricava il procedimento iterativo
x(k+1) = M−1Nx(k) + M−1b
OSS: Non è detto che per calcolare x(k) si calcoli effettivemante l’inversa diM , in generale si risolve il sistema lineare “facile”
Mx(k+1) = Nx(k) + b
JACOBI: M = D, N = −(L + U);
GAUSS-SEIDEL: M = L + D, N = −U
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.22/54
Metodi iterativi: convergenzaDEF: Un metodo iterativo per sistemi lineari
x(k+1) = Px(k) + q, P : (matrice di iterazione)
e convergente se ∀x(0)
limk→∞
‖e(k)‖ = 0
dove e(k) = x(k) − x∗ e x∗ = Px∗ + q (x∗ soluzione esatta)
e(k) = x(k) − x∗ = Px(k−1) + q − (Px∗ + q) = P (x(k−1) − x∗) = · · ·= P k(x(0) − x∗) = P ke(0)
TEO: e(k) = x(k) − x∗ = P ke(0) converge a 0 ∈ Rn, ∀x(0) se e solo se {P k} e convergente.
COR: {e(k)} converge a 0 se e solo se ρ(P ) < 1.
COR: {e(k)} converge a 0 se vale ‖P‖ < 1 per una qualunque norma naturale ‖ ‖.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.23/54
Metodi iterativi: convergenza
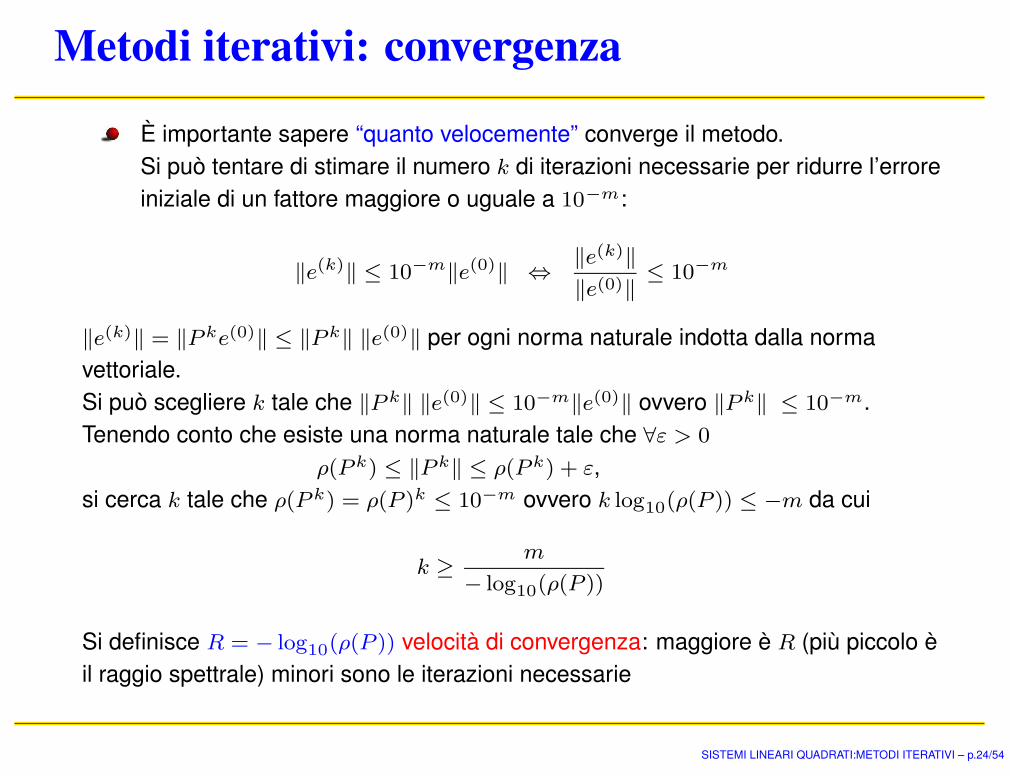
È importante sapere “quanto velocemente” converge il metodo.Si può tentare di stimare il numero k di iterazioni necessarie per ridurre l’erroreiniziale di un fattore maggiore o uguale a 10−m:
‖e(k)‖ ≤ 10−m‖e(0)‖ ⇔ ‖e(k)‖‖e(0)‖
≤ 10−m
‖e(k)‖ = ‖P ke(0)‖ ≤ ‖P k‖ ‖e(0)‖ per ogni norma naturale indotta dalla normavettoriale.Si può scegliere k tale che ‖P k‖ ‖e(0)‖ ≤ 10−m‖e(0)‖ ovvero ‖P k‖ ≤ 10−m.Tenendo conto che esiste una norma naturale tale che ∀ε > 0
ρ(P k) ≤ ‖P k‖ ≤ ρ(P k) + ε,si cerca k tale che ρ(P k) = ρ(P )k ≤ 10−m ovvero k log10(ρ(P )) ≤ −m da cui
k ≥ m
− log10(ρ(P ))
Si definisce R = − log10(ρ(P )) velocità di convergenza: maggiore è R (più piccolo èil raggio spettrale) minori sono le iterazioni necessarie
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.24/54
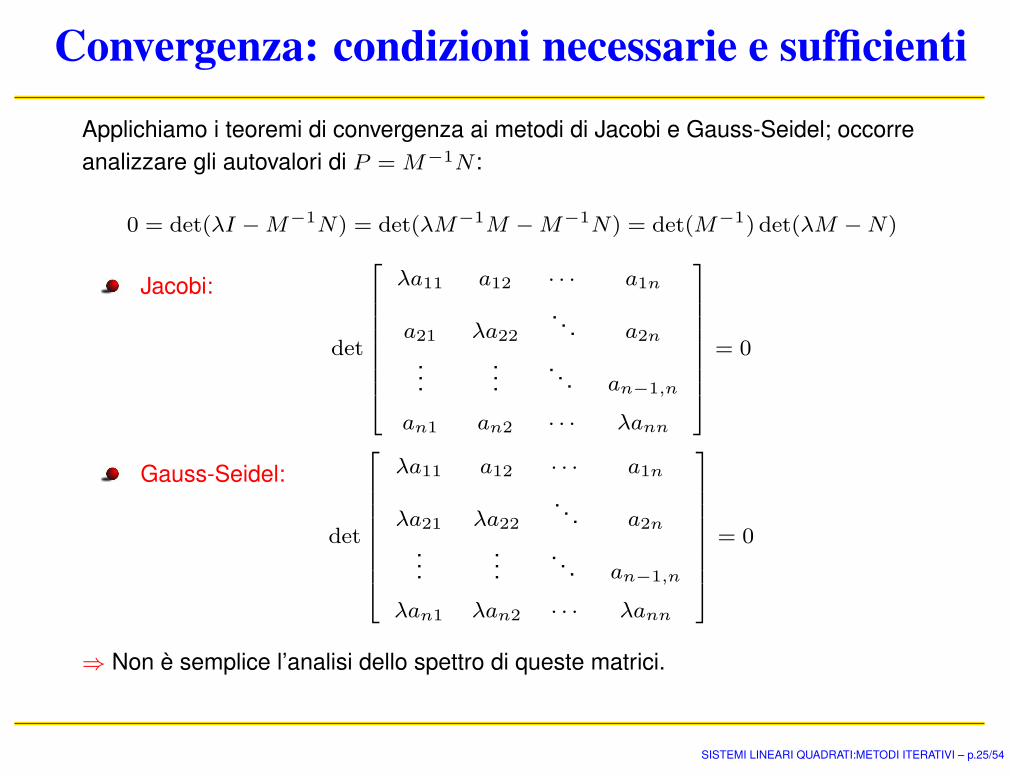
Convergenza: condizioni necessarie e sufficienti
Applichiamo i teoremi di convergenza ai metodi di Jacobi e Gauss-Seidel; occorreanalizzare gli autovalori di P = M−1N :
0 = det(λI − M−1N) = det(λM−1M − M−1N) = det(M−1) det(λM − N)
Jacobi:
det
λa11 a12 · · · a1n
a21 λa22
. . . a2n
......
. . . an−1,n
an1 an2 · · · λann
= 0
Gauss-Seidel:
det
λa11 a12 · · · a1n
λa21 λa22
. . . a2n
......
. . . an−1,n
λan1 λan2 · · · λann
= 0
⇒ Non è semplice l’analisi dello spettro di queste matrici.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.25/54
Convergenza: condizioni sufficienti
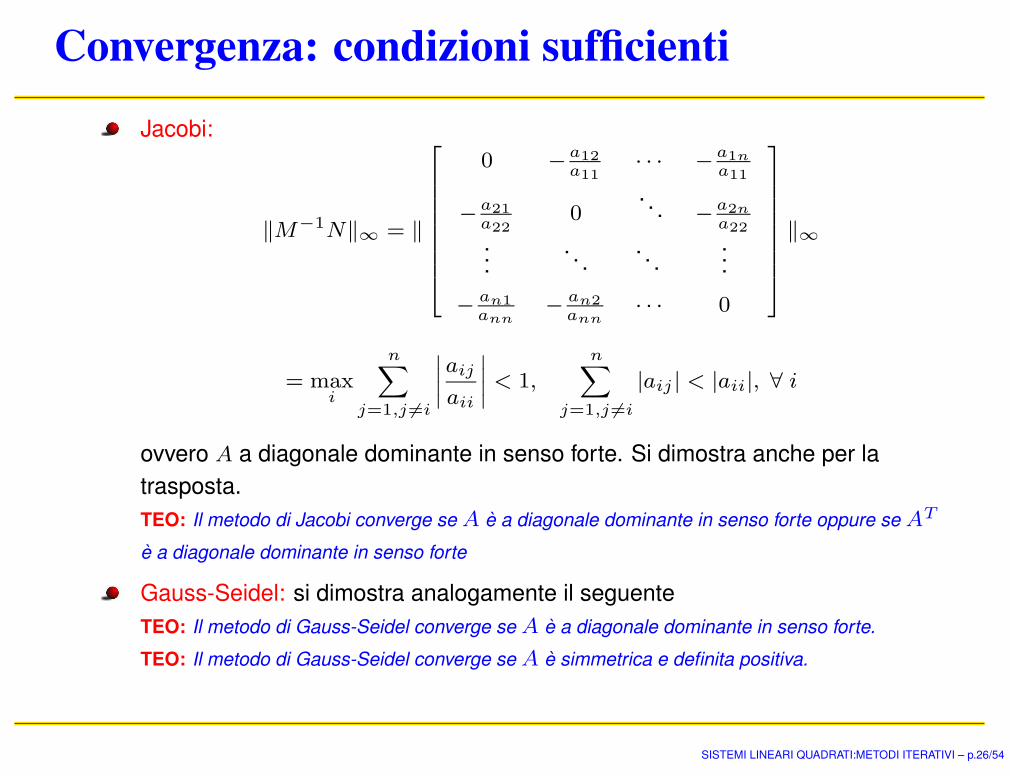
Jacobi:
‖M−1N‖∞ = ‖
0 −a12
a11
· · · −a1n
a11
−a21
a22
0. . . −a2n
a22
.... . .
. . ....
− an1
ann− an2
ann· · · 0
‖∞
= maxi
n∑
j=1,j 6=i
∣
∣
∣
∣
aij
aii
∣
∣
∣
∣
< 1,
n∑
j=1,j 6=i
|aij | < |aii|, ∀ i
ovvero A a diagonale dominante in senso forte. Si dimostra anche per latrasposta.TEO: Il metodo di Jacobi converge se A e a diagonale dominante in senso forte oppure se AT
e a diagonale dominante in senso forte
Gauss-Seidel: si dimostra analogamente il seguenteTEO: Il metodo di Gauss-Seidel converge se A e a diagonale dominante in senso forte.
TEO: Il metodo di Gauss-Seidel converge se A e simmetrica e definita positiva.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.26/54

Convergenza: condizioni necessarie
1. tr(P ) =∑n
i=1 λi: se |tr(P )| > n ⇒ ∃λi t.c. |λi| > 1
2. det(P ) = Πni=1λi: se |det(P )| > 1 ⇒ ∃λi t.c. |λi| > 1
⇒ per avere la convergenza è necessario( ma non sufficiente) che
|tr(P )| < n, |det(P )| < 1
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.27/54
Convergenza: casi particolari
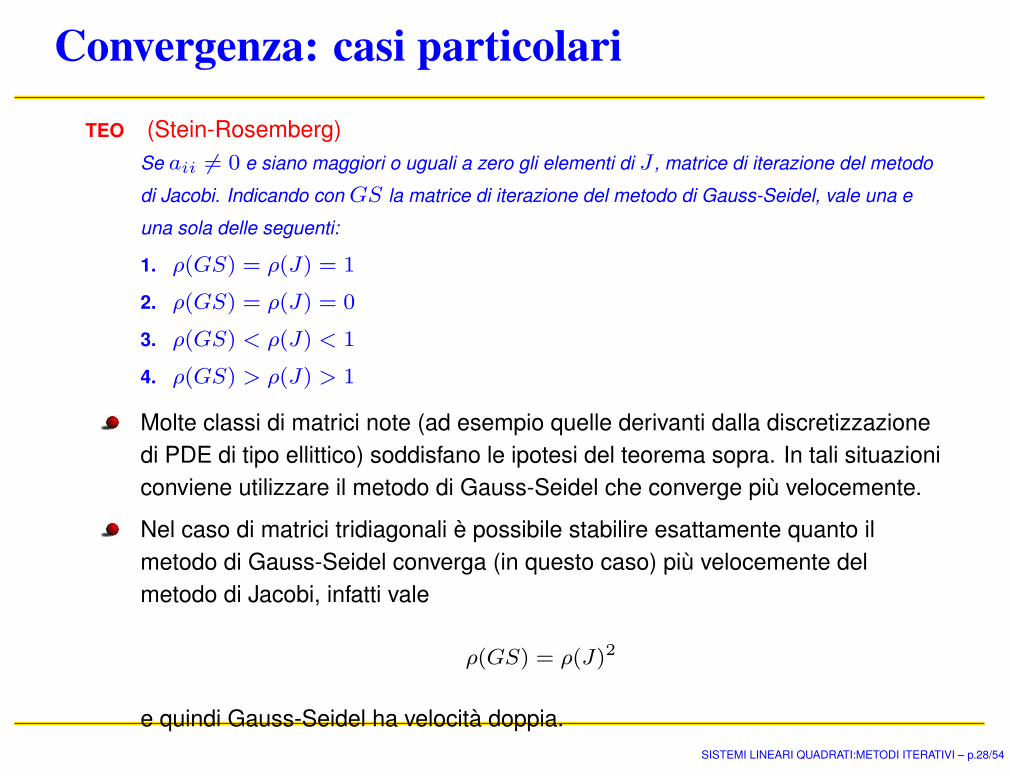
TEO (Stein-Rosemberg)Se aii 6= 0 e siano maggiori o uguali a zero gli elementi di J , matrice di iterazione del metodo
di Jacobi. Indicando con GS la matrice di iterazione del metodo di Gauss-Seidel, vale una e
una sola delle seguenti:
1. ρ(GS) = ρ(J) = 1
2. ρ(GS) = ρ(J) = 0
3. ρ(GS) < ρ(J) < 1
4. ρ(GS) > ρ(J) > 1
Molte classi di matrici note (ad esempio quelle derivanti dalla discretizzazionedi PDE di tipo ellittico) soddisfano le ipotesi del teorema sopra. In tali situazioniconviene utilizzare il metodo di Gauss-Seidel che converge più velocemente.
Nel caso di matrici tridiagonali è possibile stabilire esattamente quanto ilmetodo di Gauss-Seidel converga (in questo caso) più velocemente delmetodo di Jacobi, infatti vale
ρ(GS) = ρ(J)2
e quindi Gauss-Seidel ha velocità doppia.SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.28/54
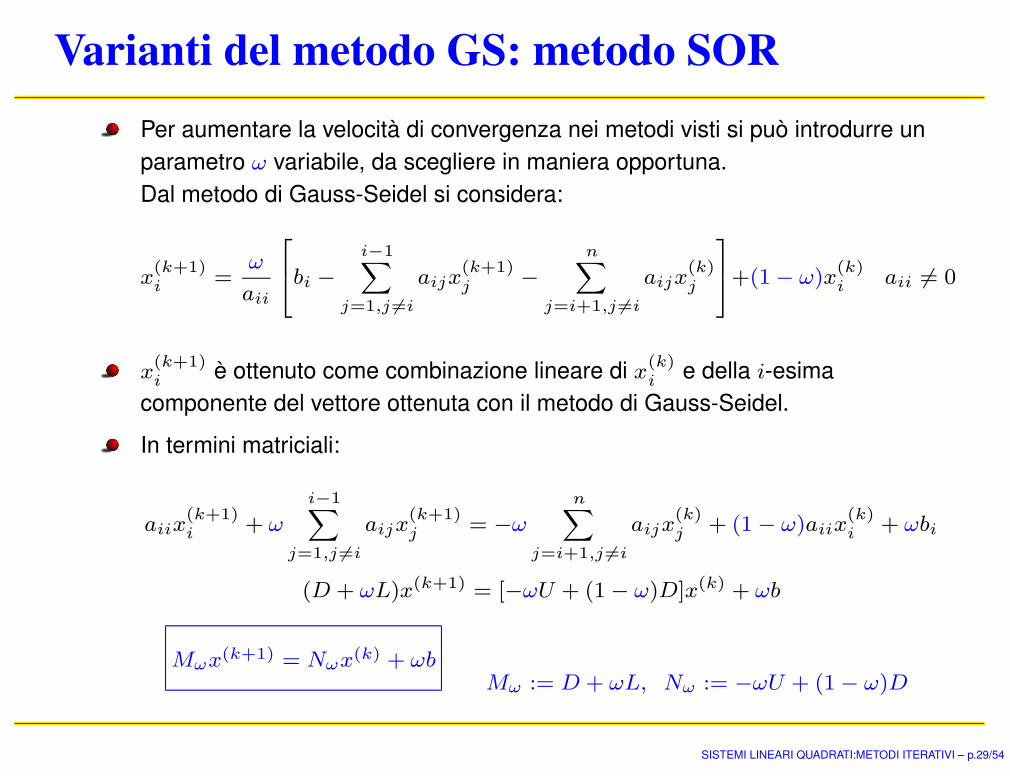
Varianti del metodo GS: metodo SORPer aumentare la velocità di convergenza nei metodi visti si può introdurre unparametro ω variabile, da scegliere in maniera opportuna.Dal metodo di Gauss-Seidel si considera:
x(k+1)i =
ω
aii
bi −i−1∑
j=1,j 6=i
aijx(k+1)j −
n∑
j=i+1,j 6=i
aijx(k)j
+(1 − ω)x(k)i aii 6= 0
x(k+1)i è ottenuto come combinazione lineare di x
(k)i e della i-esima
componente del vettore ottenuta con il metodo di Gauss-Seidel.
In termini matriciali:
aiix(k+1)i + ω
i−1∑
j=1,j 6=i
aijx(k+1)j = −ω
n∑
j=i+1,j 6=i
aijx(k)j + (1 − ω)aiix
(k)i + ωbi
(D + ωL)x(k+1) = [−ωU + (1 − ω)D]x(k) + ωb
Mωx(k+1) = Nωx(k) + ωbMω := D + ωL, Nω := −ωU + (1 − ω)D
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.29/54
Metodo SOR
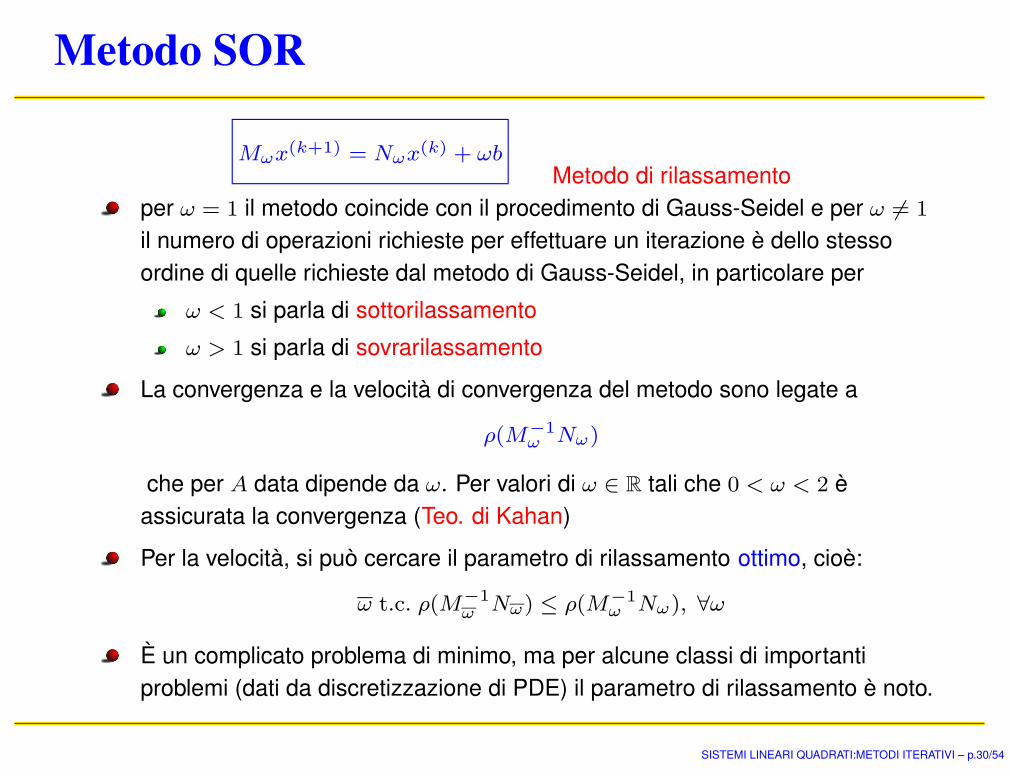
Mωx(k+1) = Nωx(k) + ωbMetodo di rilassamento
per ω = 1 il metodo coincide con il procedimento di Gauss-Seidel e per ω 6= 1
il numero di operazioni richieste per effettuare un iterazione è dello stessoordine di quelle richieste dal metodo di Gauss-Seidel, in particolare per
ω < 1 si parla di sottorilassamento
ω > 1 si parla di sovrarilassamento
La convergenza e la velocità di convergenza del metodo sono legate a
ρ(M−1ω Nω)
che per A data dipende da ω. Per valori di ω ∈ R tali che 0 < ω < 2 èassicurata la convergenza (Teo. di Kahan)
Per la velocità, si può cercare il parametro di rilassamento ottimo, cioè:
ω t.c. ρ(M−1ω Nω) ≤ ρ(M−1
ω Nω), ∀ω
È un complicato problema di minimo, ma per alcune classi di importantiproblemi (dati da discretizzazione di PDE) il parametro di rilassamento è noto.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.30/54
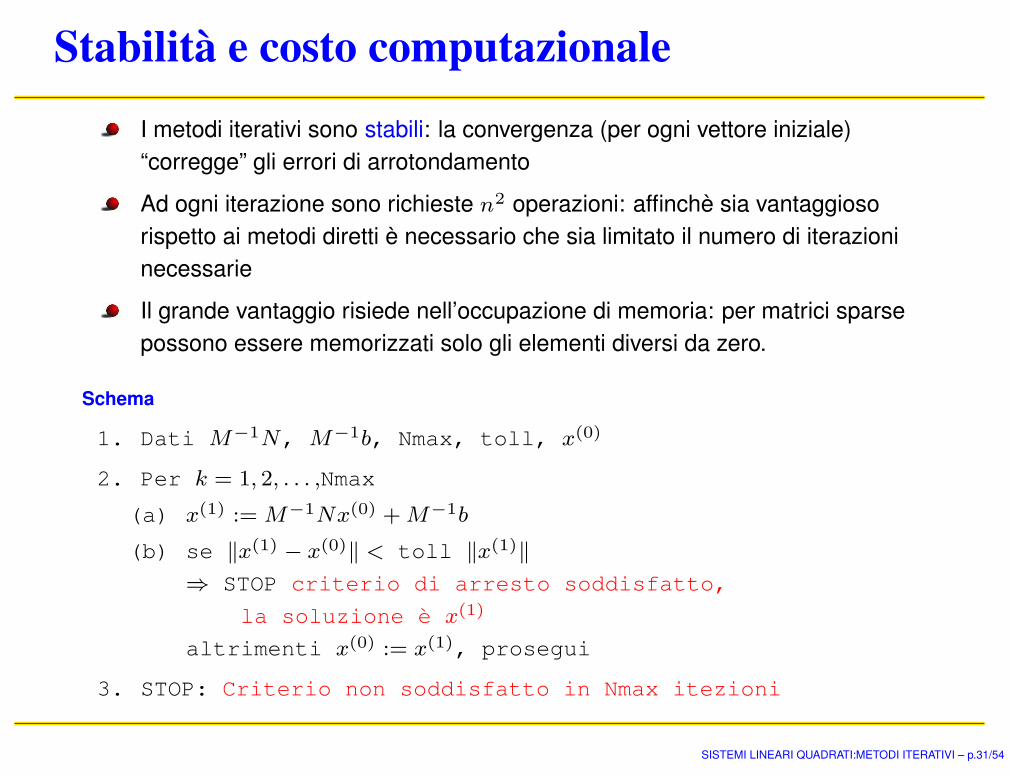
Stabilità e costo computazionale
I metodi iterativi sono stabili: la convergenza (per ogni vettore iniziale)“corregge” gli errori di arrotondamento
Ad ogni iterazione sono richieste n2 operazioni: affinchè sia vantaggiosorispetto ai metodi diretti è necessario che sia limitato il numero di iterazioninecessarie
Il grande vantaggio risiede nell’occupazione di memoria: per matrici sparsepossono essere memorizzati solo gli elementi diversi da zero.
Schema
1. Dati M−1N, M−1b, Nmax, toll, x(0)
2. Per k = 1, 2, . . . ,Nmax
(a) x(1) := M−1Nx(0) + M−1b
(b) se ‖x(1) − x(0)‖ < toll ‖x(1)‖⇒ STOP criterio di arresto soddisfatto,
la soluzione e x(1)
altrimenti x(0) := x(1), prosegui
3. STOP: Criterio non soddisfatto in Nmax itezioni
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.31/54

ESERCIZI
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.32/54
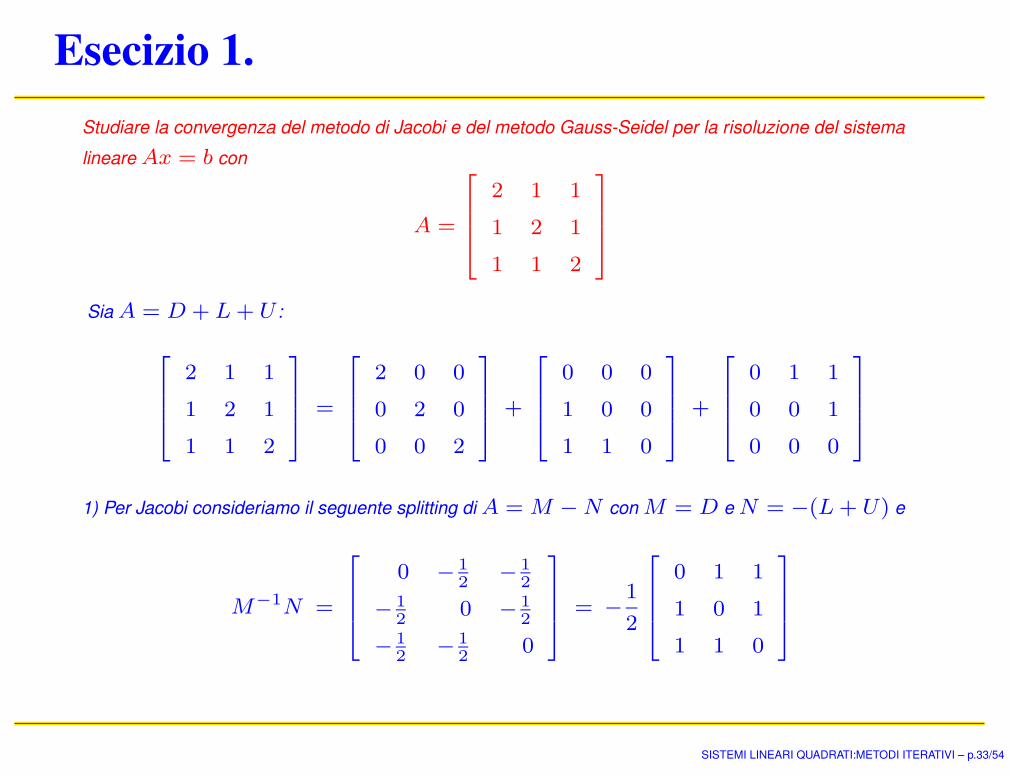
Esecizio 1.Studiare la convergenza del metodo di Jacobi e del metodo Gauss-Seidel per la risoluzione del sistema
lineare Ax = b con
A =
2 1 1
1 2 1
1 1 2
Sia A = D + L + U :
2 1 1
1 2 1
1 1 2
=
2 0 0
0 2 0
0 0 2
+
0 0 0
1 0 0
1 1 0
+
0 1 1
0 0 1
0 0 0
1) Per Jacobi consideriamo il seguente splitting di A = M − N con M = D e N = −(L + U) e
M−1N =
0 − 12
− 12
− 12
0 − 12
− 12
− 12
0
= −1
2
0 1 1
1 0 1
1 1 0
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.33/54

Esecizio 1 (segue ...)
Si cercano gli autovalori di M−1N :
det
−λ 1 1
1 −λ 1
1 1 −λ
= −λ3 +3λ+2 = λ(1−λ2)+2(λ+1) = (λ+1)(λ−λ2 +2)
dove (λ + 1)(λ − λ2 + 2) = 0 per λ = −1, 2. Quindi gli autovalori di M−1N sono − 12{−1, 2} e
il raggio spettrale
ρ(M−1N) =1
2max{1, 2} = 1 ⇒ non converge
ad esempio
x(0) =
1
1
1
, b =
0
0
0
⇒ x(1) = M−1Nx(0) = −1
2
0 1 1
1 0 1
1 1 0
1
1
1
= −
1
1
1
al passo k−esimo si ha x(k) = (−1)kx(0), quindi non converge.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.34/54
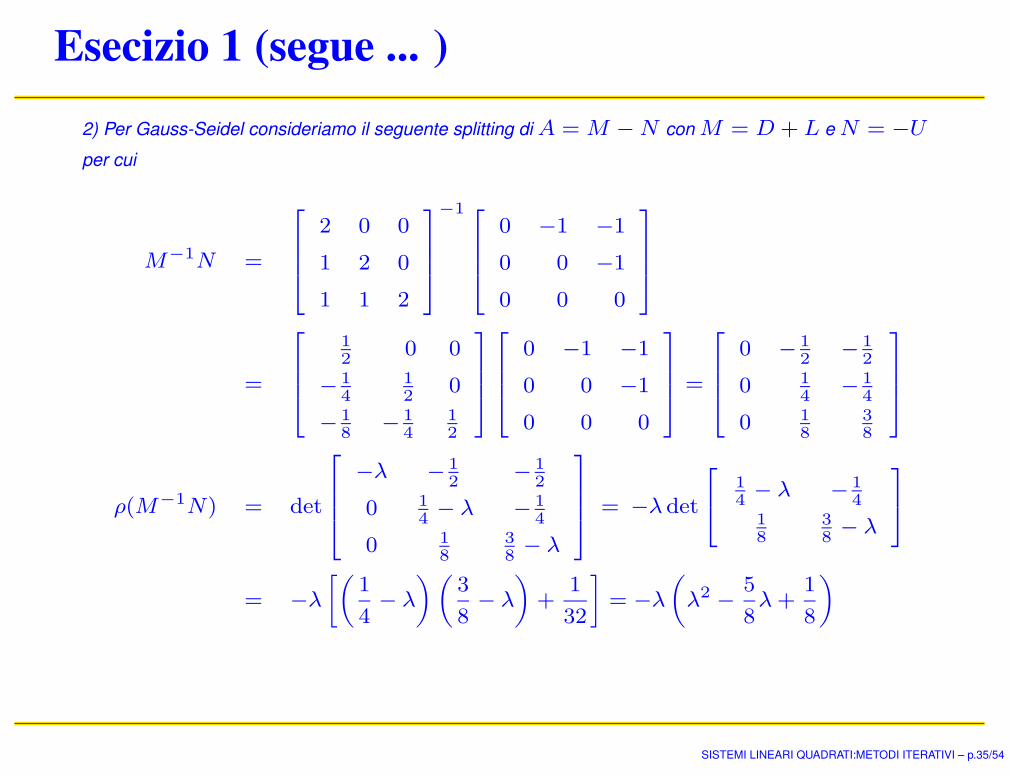
Esecizio 1 (segue ... )
2) Per Gauss-Seidel consideriamo il seguente splitting di A = M − N con M = D + L e N = −U
per cui
M−1N =
2 0 0
1 2 0
1 1 2
−1
0 −1 −1
0 0 −1
0 0 0
=
12
0 0
− 14
12
0
− 18
− 14
12
0 −1 −1
0 0 −1
0 0 0
=
0 − 12
− 12
0 14
− 14
0 18
38
ρ(M−1N) = det
−λ − 12
− 12
0 14− λ − 1
4
0 18
38− λ
= −λ det
14− λ − 1
418
38− λ
= −λ
[(
1
4− λ
) (
3
8− λ
)
+1
32
]
= −λ
(
λ2 − 5
8λ +
1
8
)
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.35/54
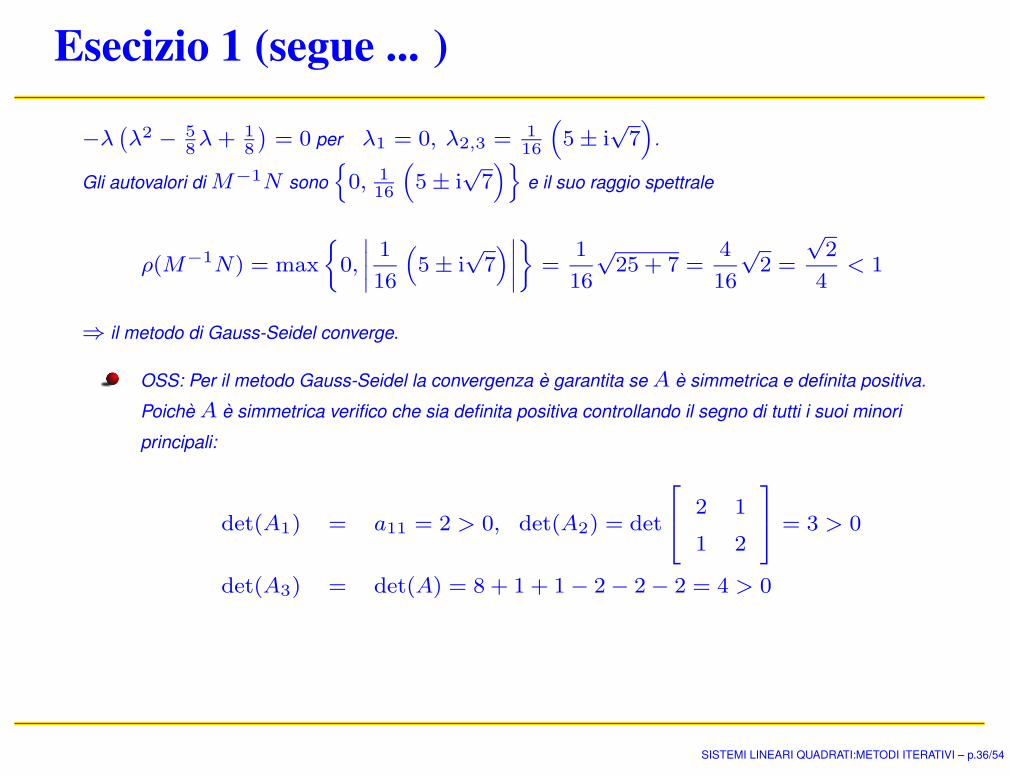
Esecizio 1 (segue ... )
−λ(
λ2 − 58λ + 1
8
)
= 0 per λ1 = 0, λ2,3 = 116
(
5 ± i√
7)
.
Gli autovalori di M−1N sono{
0, 116
(
5 ± i√
7)}
e il suo raggio spettrale
ρ(M−1N) = max
{
0,
∣
∣
∣
∣
1
16
(
5 ± i√
7)
∣
∣
∣
∣
}
=1
16
√25 + 7 =
4
16
√2 =
√2
4< 1
⇒ il metodo di Gauss-Seidel converge.
OSS: Per il metodo Gauss-Seidel la convergenza e garantita se A e simmetrica e definita positiva.
Poiche A e simmetrica verifico che sia definita positiva controllando il segno di tutti i suoi minori
principali:
det(A1) = a11 = 2 > 0, det(A2) = det
2 1
1 2
= 3 > 0
det(A3) = det(A) = 8 + 1 + 1 − 2 − 2 − 2 = 4 > 0
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.36/54
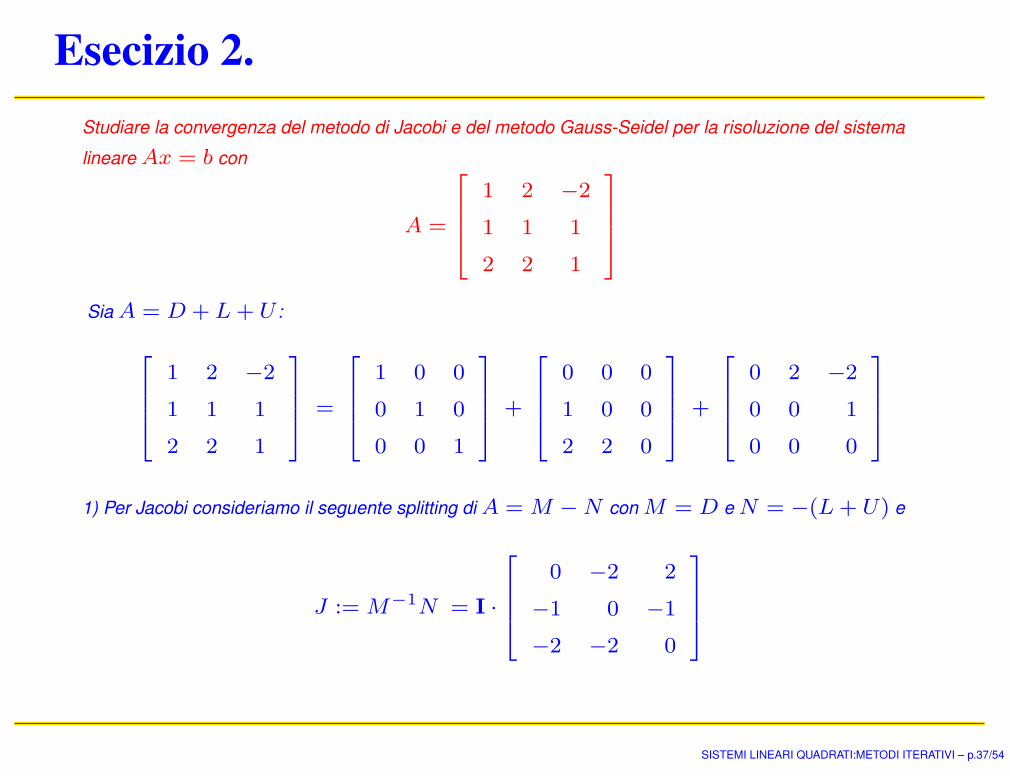
Esecizio 2.Studiare la convergenza del metodo di Jacobi e del metodo Gauss-Seidel per la risoluzione del sistema
lineare Ax = b con
A =
1 2 −2
1 1 1
2 2 1
Sia A = D + L + U :
1 2 −2
1 1 1
2 2 1
=
1 0 0
0 1 0
0 0 1
+
0 0 0
1 0 0
2 2 0
+
0 2 −2
0 0 1
0 0 0
1) Per Jacobi consideriamo il seguente splitting di A = M − N con M = D e N = −(L + U) e
J := M−1N = I ·
0 −2 2
−1 0 −1
−2 −2 0
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.37/54
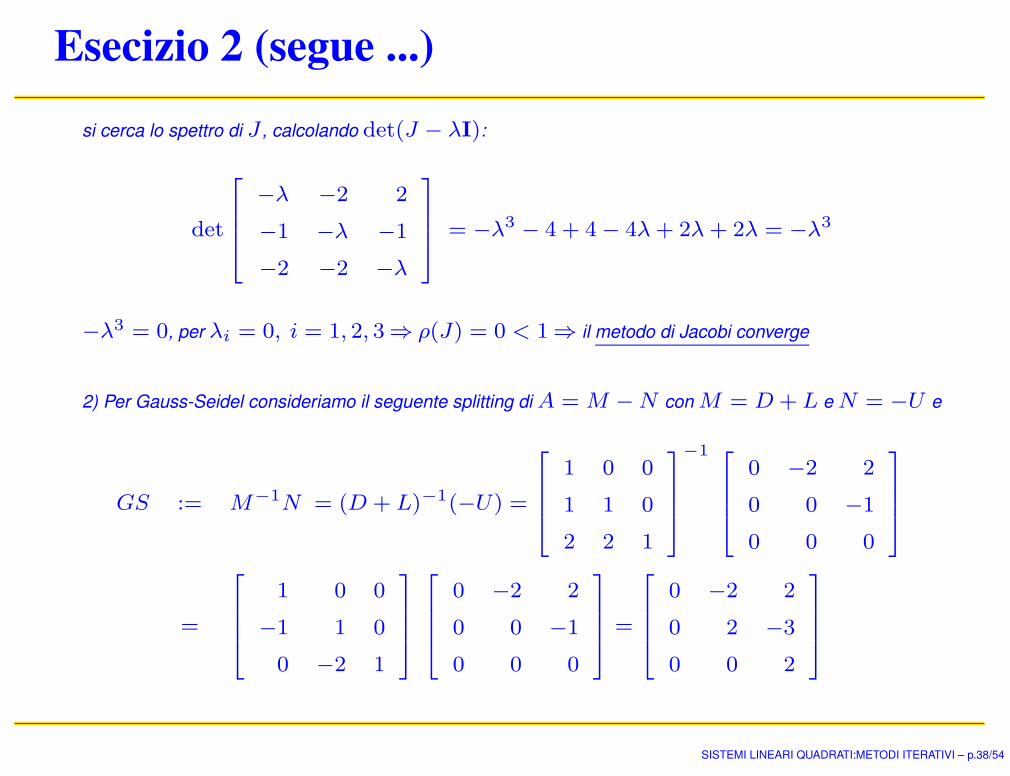
Esecizio 2 (segue ...)
si cerca lo spettro di J , calcolando det(J − λI):
det
−λ −2 2
−1 −λ −1
−2 −2 −λ
= −λ3 − 4 + 4 − 4λ + 2λ + 2λ = −λ3
−λ3 = 0, per λi = 0, i = 1, 2, 3 ⇒ ρ(J) = 0 < 1 ⇒ il metodo di Jacobi converge
2) Per Gauss-Seidel consideriamo il seguente splitting di A = M − N con M = D + L e N = −U e
GS := M−1N = (D + L)−1(−U) =
1 0 0
1 1 0
2 2 1
−1
0 −2 2
0 0 −1
0 0 0
=
1 0 0
−1 1 0
0 −2 1
0 −2 2
0 0 −1
0 0 0
=
0 −2 2
0 2 −3
0 0 2
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.38/54
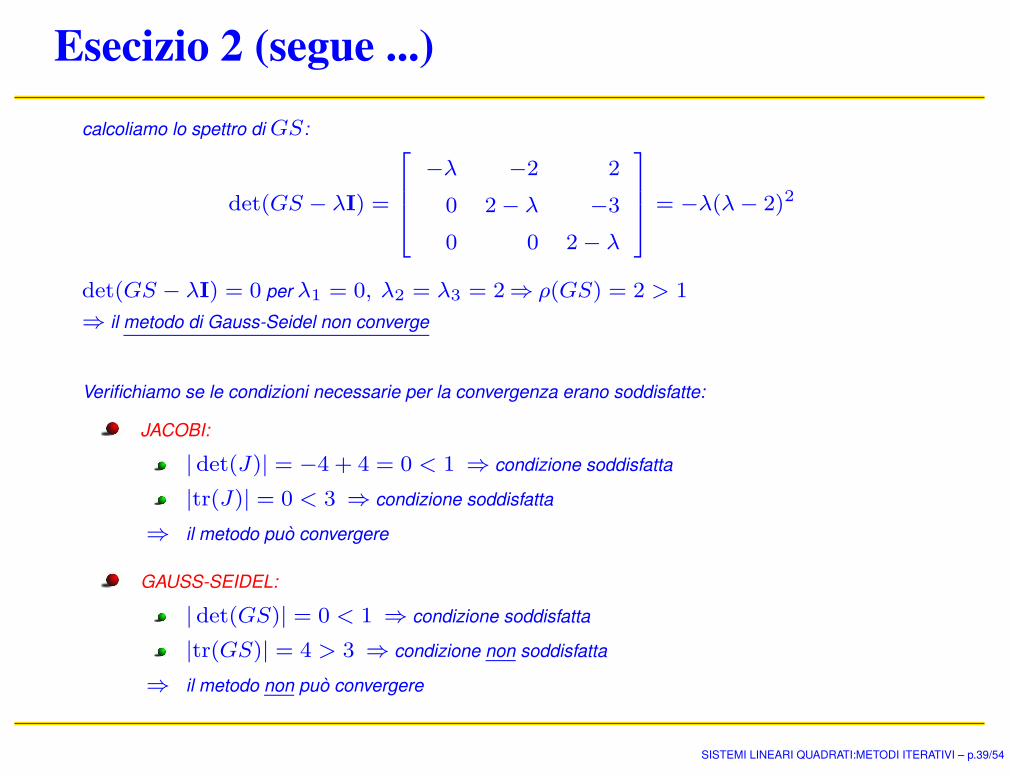
Esecizio 2 (segue ...)
calcoliamo lo spettro di GS:
det(GS − λI) =
−λ −2 2
0 2 − λ −3
0 0 2 − λ
= −λ(λ − 2)2
det(GS − λI) = 0 per λ1 = 0, λ2 = λ3 = 2 ⇒ ρ(GS) = 2 > 1
⇒ il metodo di Gauss-Seidel non converge
Verifichiamo se le condizioni necessarie per la convergenza erano soddisfatte:
JACOBI:
|det(J)| = −4 + 4 = 0 < 1 ⇒ condizione soddisfatta
|tr(J)| = 0 < 3 ⇒ condizione soddisfatta
⇒ il metodo puo convergere
GAUSS-SEIDEL:
|det(GS)| = 0 < 1 ⇒ condizione soddisfatta
|tr(GS)| = 4 > 3 ⇒ condizione non soddisfatta
⇒ il metodo non puo convergere
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.39/54
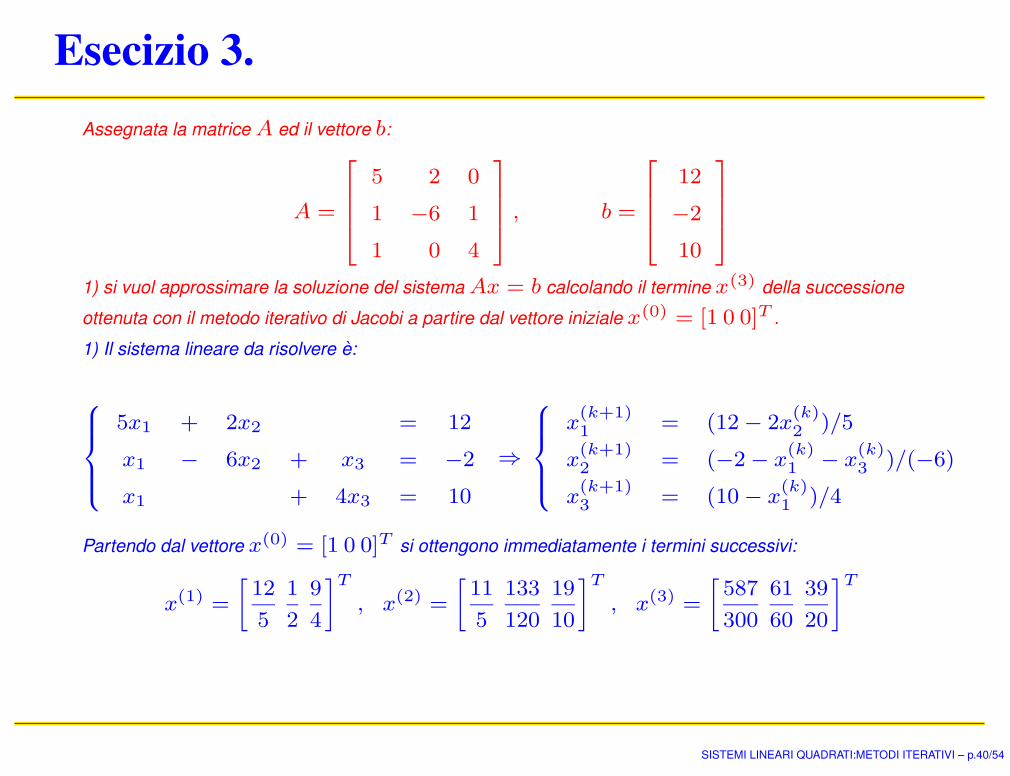
Esecizio 3.Assegnata la matrice A ed il vettore b:
A =
5 2 0
1 −6 1
1 0 4
, b =
12
−2
10
1) si vuol approssimare la soluzione del sistema Ax = b calcolando il termine x(3) della successione
ottenuta con il metodo iterativo di Jacobi a partire dal vettore iniziale x(0) = [1 0 0]T .
1) Il sistema lineare da risolvere e:
5x1 + 2x2 = 12
x1 − 6x2 + x3 = −2
x1 + 4x3 = 10
⇒
x(k+1)1 = (12 − 2x
(k)2 )/5
x(k+1)2 = (−2 − x
(k)1 − x
(k)3 )/(−6)
x(k+1)3 = (10 − x
(k)1 )/4
Partendo dal vettore x(0) = [1 0 0]T si ottengono immediatamente i termini successivi:
x(1) =
[
12
5
1
2
9
4
]T
, x(2) =
[
11
5
133
120
19
10
]T
, x(3) =
[
587
300
61
60
39
20
]T
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.40/54
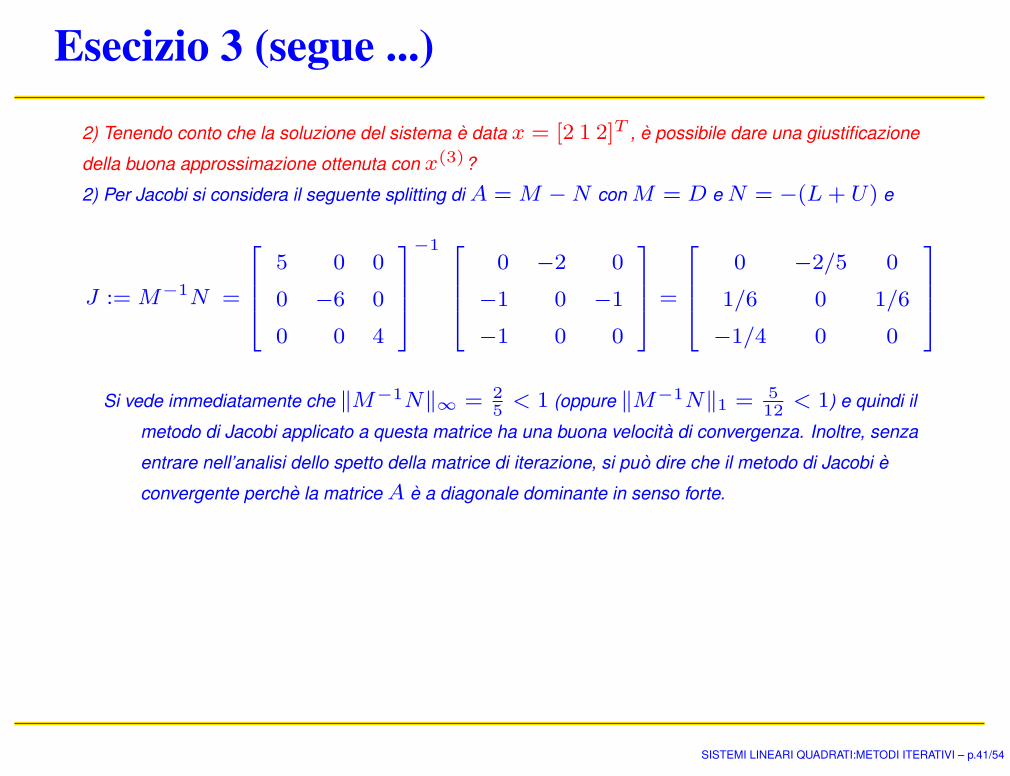
Esecizio 3 (segue ...)
2) Tenendo conto che la soluzione del sistema e data x = [2 1 2]T , e possibile dare una giustificazione
della buona approssimazione ottenuta con x(3)?
2) Per Jacobi si considera il seguente splitting di A = M − N con M = D e N = −(L + U) e
J := M−1N =
5 0 0
0 −6 0
0 0 4
−1
0 −2 0
−1 0 −1
−1 0 0
=
0 −2/5 0
1/6 0 1/6
−1/4 0 0
Si vede immediatamente che ‖M−1N‖∞ = 25
< 1 (oppure ‖M−1N‖1 = 512
< 1) e quindi il
metodo di Jacobi applicato a questa matrice ha una buona velocita di convergenza. Inoltre, senza
entrare nell’analisi dello spetto della matrice di iterazione, si puo dire che il metodo di Jacobi e
convergente perche la matrice A e a diagonale dominante in senso forte.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.41/54
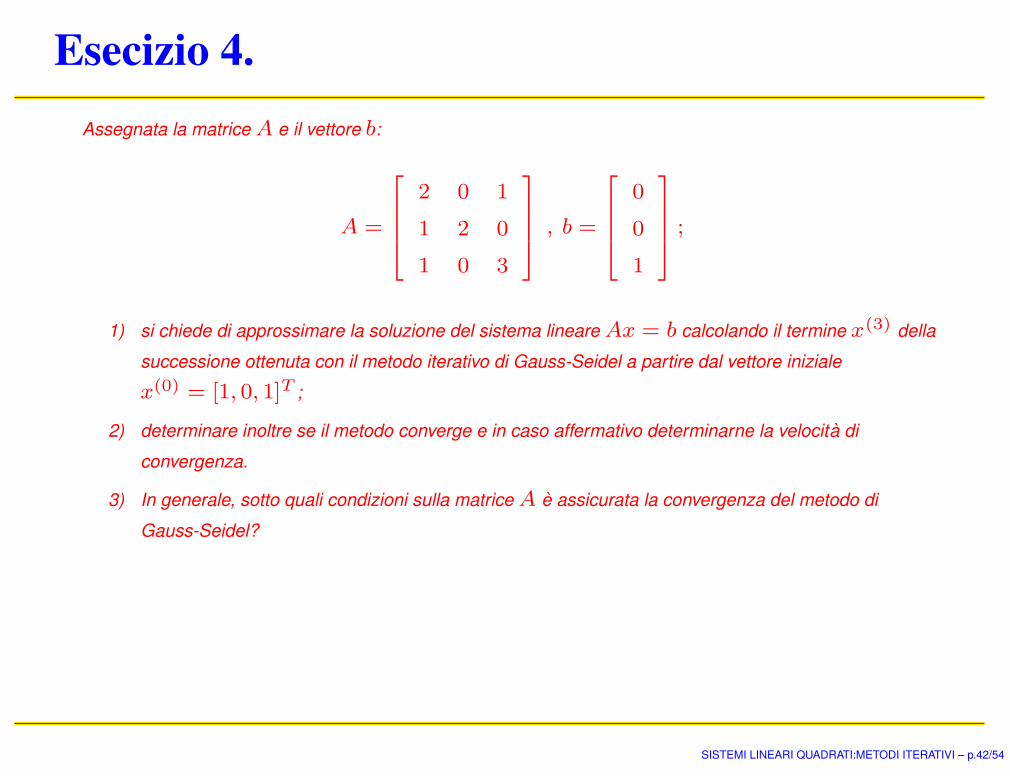
Esecizio 4.Assegnata la matrice A e il vettore b:
A =
2 0 1
1 2 0
1 0 3
, b =
0
0
1
;
1) si chiede di approssimare la soluzione del sistema lineare Ax = b calcolando il termine x(3) della
successione ottenuta con il metodo iterativo di Gauss-Seidel a partire dal vettore iniziale
x(0) = [1, 0, 1]T ;
2) determinare inoltre se il metodo converge e in caso affermativo determinarne la velocita di
convergenza.
3) In generale, sotto quali condizioni sulla matrice A e assicurata la convergenza del metodo di
Gauss-Seidel?
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.42/54
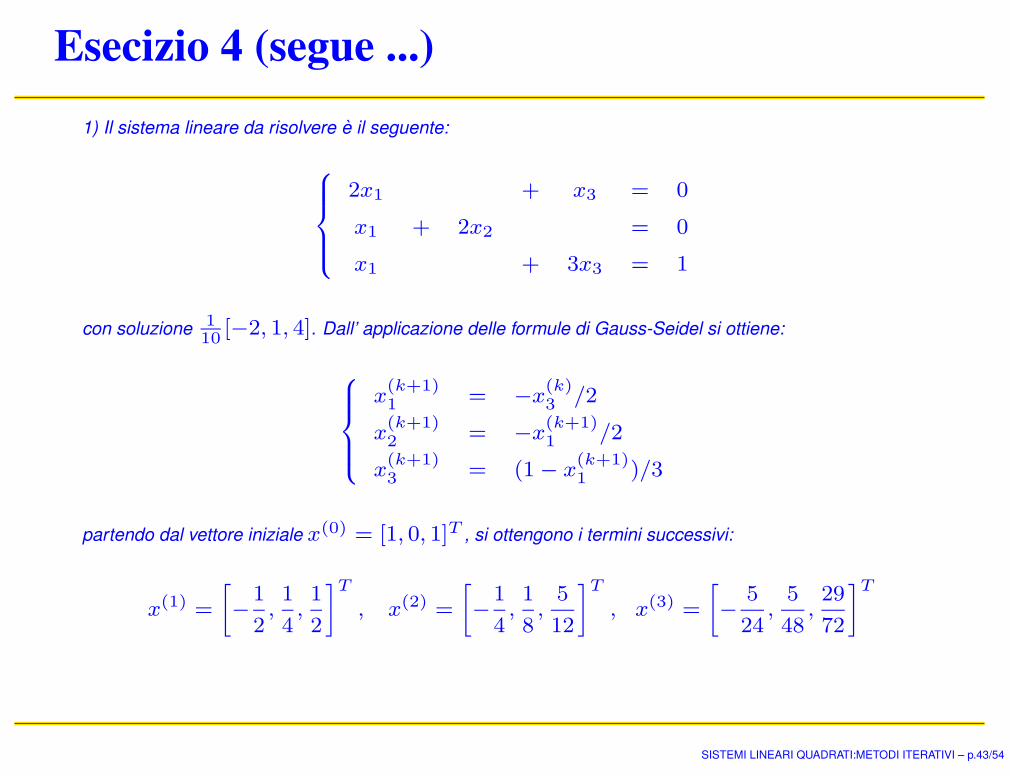
Esecizio 4 (segue ...)1) Il sistema lineare da risolvere e il seguente:
2x1 + x3 = 0
x1 + 2x2 = 0
x1 + 3x3 = 1
con soluzione 110
[−2, 1, 4]. Dall’ applicazione delle formule di Gauss-Seidel si ottiene:
x(k+1)1 = −x
(k)3 /2
x(k+1)2 = −x
(k+1)1 /2
x(k+1)3 = (1 − x
(k+1)1 )/3
partendo dal vettore iniziale x(0) = [1, 0, 1]T , si ottengono i termini successivi:
x(1) =
[
−1
2,1
4,1
2
]T
, x(2) =
[
−1
4,1
8,
5
12
]T
, x(3) =
[
− 5
24,
5
48,29
72
]T
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.43/54
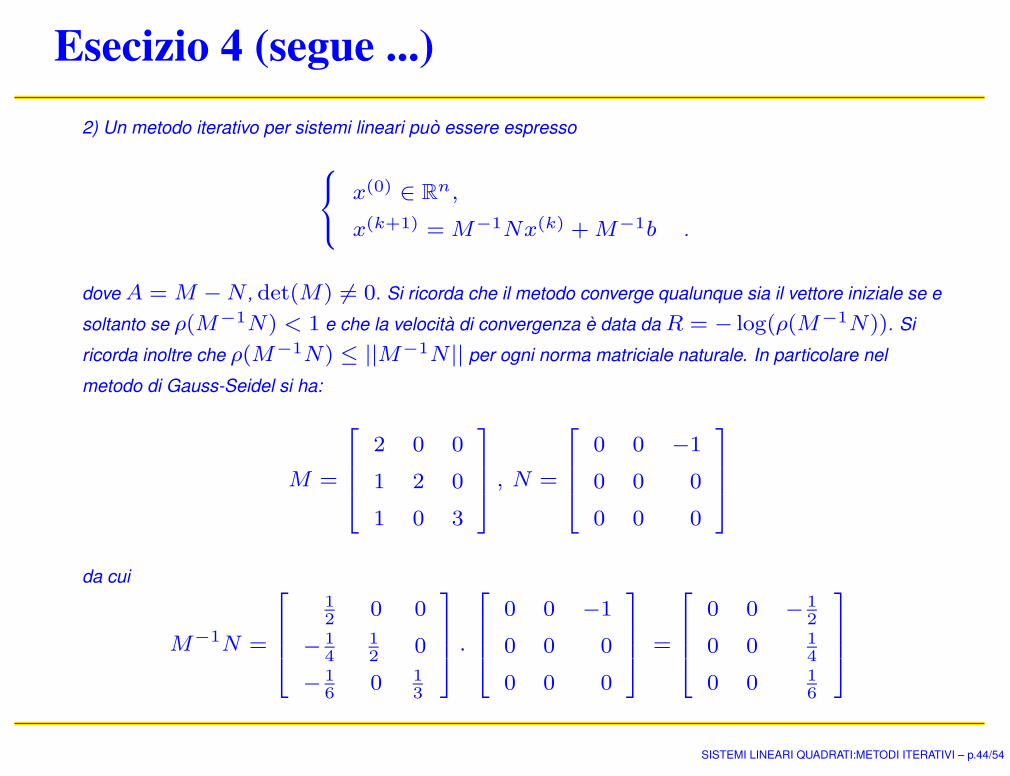
Esecizio 4 (segue ...)2) Un metodo iterativo per sistemi lineari puo essere espresso
x(0) ∈ Rn,
x(k+1) = M−1Nx(k) + M−1b .
dove A = M − N , det(M) 6= 0. Si ricorda che il metodo converge qualunque sia il vettore iniziale se e
soltanto se ρ(M−1N) < 1 e che la velocita di convergenza e data da R = − log(ρ(M−1N)). Si
ricorda inoltre che ρ(M−1N) ≤ ||M−1N || per ogni norma matriciale naturale. In particolare nel
metodo di Gauss-Seidel si ha:
M =
2 0 0
1 2 0
1 0 3
, N =
0 0 −1
0 0 0
0 0 0
da cui
M−1N =
12
0 0
− 14
12
0
− 16
0 13
.
0 0 −1
0 0 0
0 0 0
=
0 0 − 12
0 0 14
0 0 16
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.44/54
Esecizio 4 (segue ...)
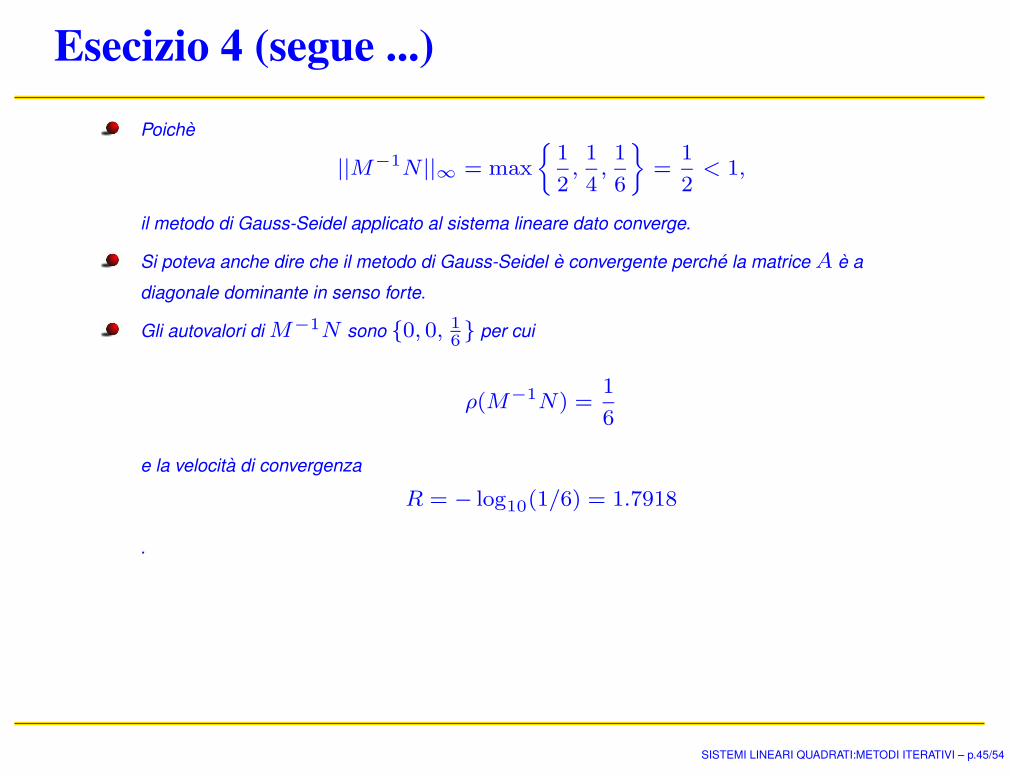
Poiche
||M−1N ||∞ = max
{
1
2,1
4,1
6
}
=1
2< 1,
il metodo di Gauss-Seidel applicato al sistema lineare dato converge.
Si poteva anche dire che il metodo di Gauss-Seidel e convergente perche la matrice A e a
diagonale dominante in senso forte.
Gli autovalori di M−1N sono {0, 0, 16} per cui
ρ(M−1N) =1
6
e la velocita di convergenza
R = − log10(1/6) = 1.7918
.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.45/54
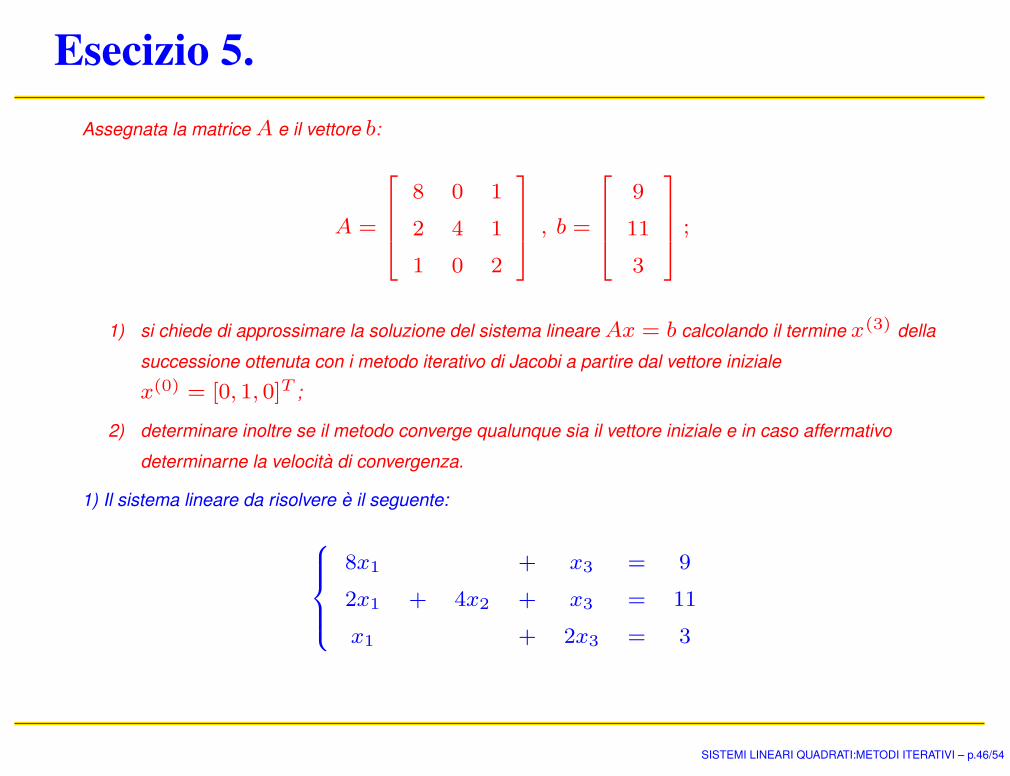
Esecizio 5.Assegnata la matrice A e il vettore b:
A =
8 0 1
2 4 1
1 0 2
, b =
9
11
3
;
1) si chiede di approssimare la soluzione del sistema lineare Ax = b calcolando il termine x(3) della
successione ottenuta con i metodo iterativo di Jacobi a partire dal vettore iniziale
x(0) = [0, 1, 0]T ;
2) determinare inoltre se il metodo converge qualunque sia il vettore iniziale e in caso affermativo
determinarne la velocita di convergenza.
1) Il sistema lineare da risolvere e il seguente:
8x1 + x3 = 9
2x1 + 4x2 + x3 = 11
x1 + 2x3 = 3
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.46/54
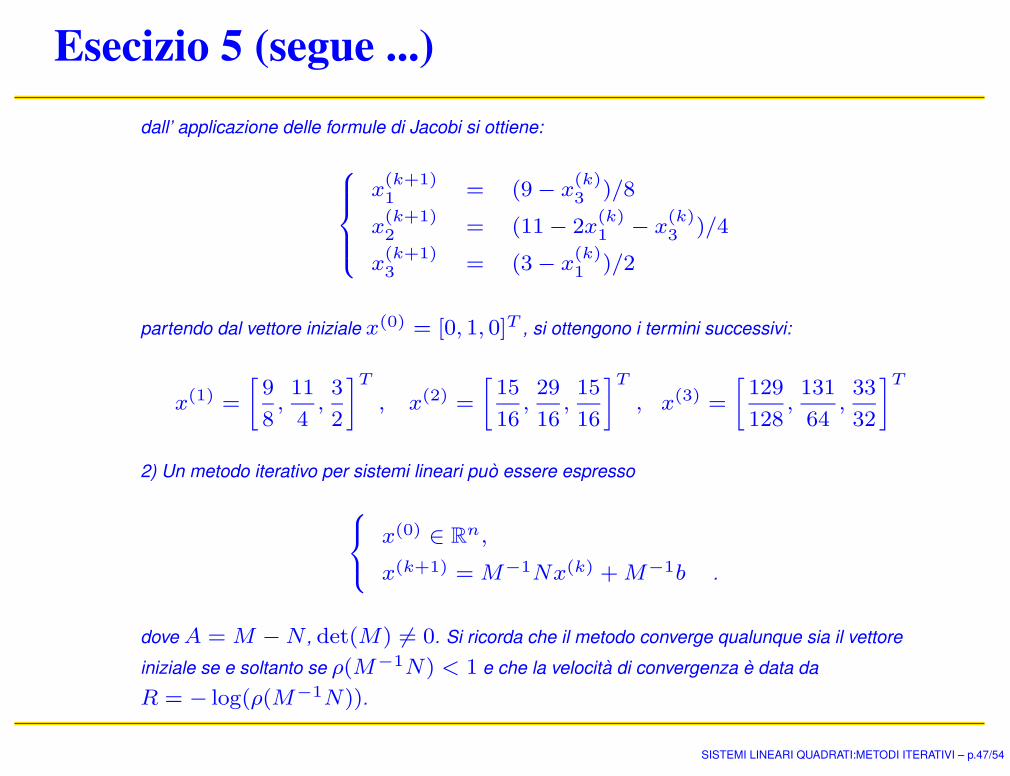
Esecizio 5 (segue ...)dall’ applicazione delle formule di Jacobi si ottiene:
x(k+1)1 = (9 − x
(k)3 )/8
x(k+1)2 = (11 − 2x
(k)1 − x
(k)3 )/4
x(k+1)3 = (3 − x
(k)1 )/2
partendo dal vettore iniziale x(0) = [0, 1, 0]T , si ottengono i termini successivi:
x(1) =
[
9
8,11
4,3
2
]T
, x(2) =
[
15
16,29
16,15
16
]T
, x(3) =
[
129
128,131
64,33
32
]T
2) Un metodo iterativo per sistemi lineari puo essere espresso
x(0) ∈ Rn,
x(k+1) = M−1Nx(k) + M−1b .
dove A = M − N , det(M) 6= 0. Si ricorda che il metodo converge qualunque sia il vettore
iniziale se e soltanto se ρ(M−1N) < 1 e che la velocita di convergenza e data da
R = − log(ρ(M−1N)).
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.47/54
Esecizio 5 (segue ...)
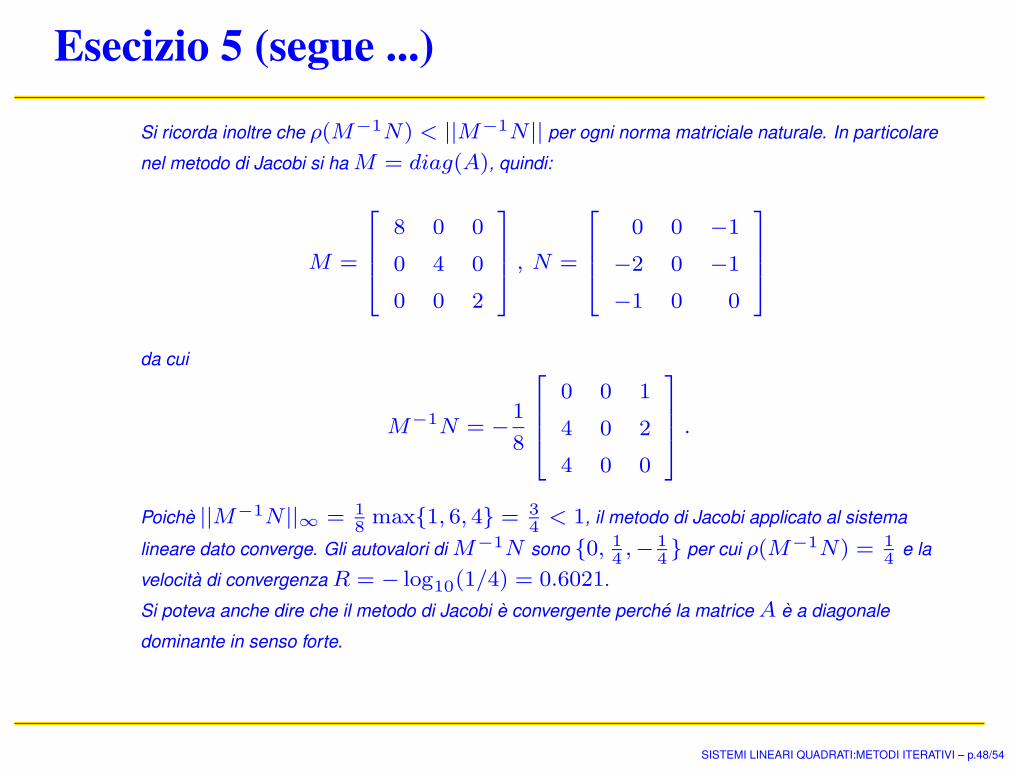
Si ricorda inoltre che ρ(M−1N) < ||M−1N || per ogni norma matriciale naturale. In particolare
nel metodo di Jacobi si ha M = diag(A), quindi:
M =
8 0 0
0 4 0
0 0 2
, N =
0 0 −1
−2 0 −1
−1 0 0
da cui
M−1N = −1
8
0 0 1
4 0 2
4 0 0
.
Poiche ||M−1N ||∞ = 18
max{1, 6, 4} = 34
< 1, il metodo di Jacobi applicato al sistema
lineare dato converge. Gli autovalori di M−1N sono {0, 14,− 1
4} per cui ρ(M−1N) = 1
4e la
velocita di convergenza R = − log10(1/4) = 0.6021.
Si poteva anche dire che il metodo di Jacobi e convergente perche la matrice A e a diagonale
dominante in senso forte.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.48/54
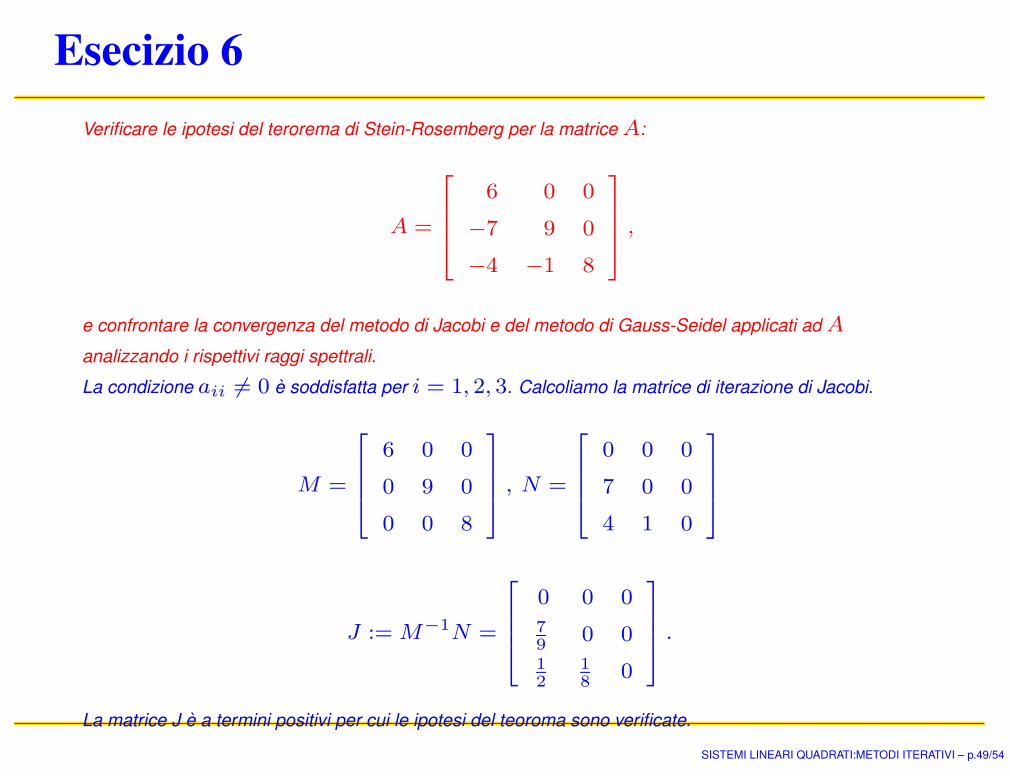
Esecizio 6Verificare le ipotesi del terorema di Stein-Rosemberg per la matrice A:
A =
6 0 0
−7 9 0
−4 −1 8
,
e confrontare la convergenza del metodo di Jacobi e del metodo di Gauss-Seidel applicati ad A
analizzando i rispettivi raggi spettrali.
La condizione aii 6= 0 e soddisfatta per i = 1, 2, 3. Calcoliamo la matrice di iterazione di Jacobi.
M =
6 0 0
0 9 0
0 0 8
, N =
0 0 0
7 0 0
4 1 0
J := M−1N =
0 0 0
79
0 0
12
18
0
.
La matrice J e a termini positivi per cui le ipotesi del teoroma sono verificate.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.49/54
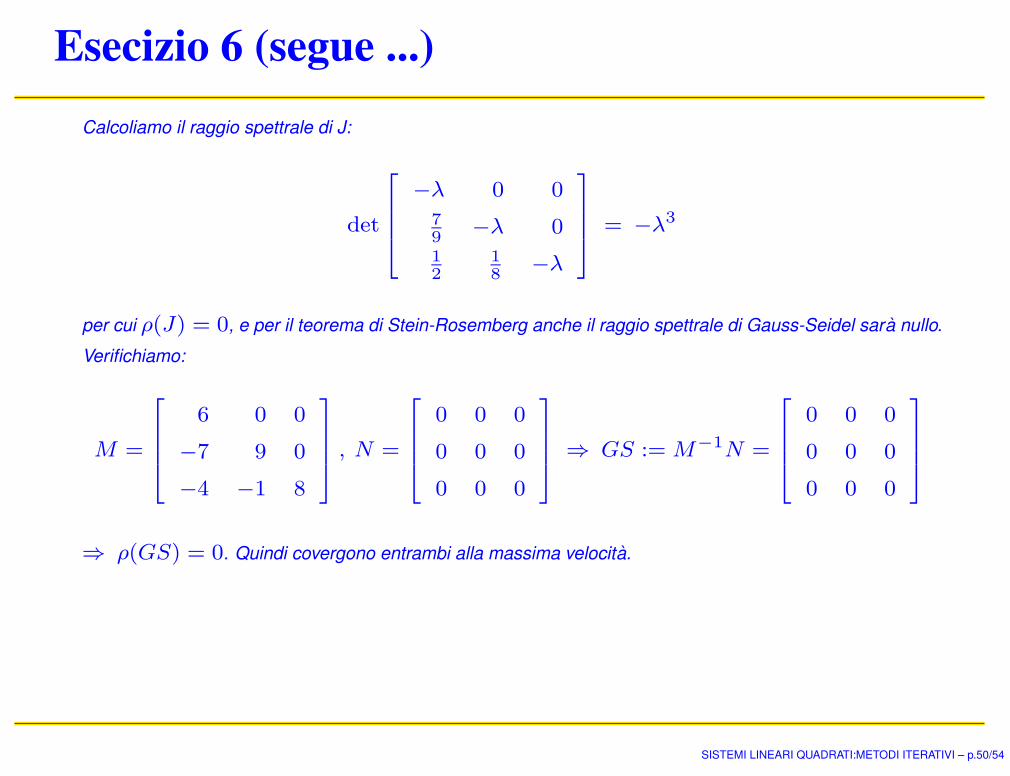
Esecizio 6 (segue ...)Calcoliamo il raggio spettrale di J:
det
−λ 0 0
79
−λ 0
12
18
−λ
= −λ3
per cui ρ(J) = 0, e per il teorema di Stein-Rosemberg anche il raggio spettrale di Gauss-Seidel sara nullo.
Verifichiamo:
M =
6 0 0
−7 9 0
−4 −1 8
, N =
0 0 0
0 0 0
0 0 0
⇒ GS := M−1N =
0 0 0
0 0 0
0 0 0
⇒ ρ(GS) = 0. Quindi covergono entrambi alla massima velocita.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.50/54

Esecizio 7Verificare le ipotesi del terorema di Stein-Rosemberg per la matrice A:
A =
9 −3 −1
−2 9 0
−2 0 9
,
e confrontare la convergenza del metodo di Jacobi e del metodo di Gauss-Seidel applicati ad A
analizzando i rispettivi raggi spettrali.
La condizione aii 6= 0 e soddisfatta per i = 1, 2, 3. Calcoliamo la matrice di iterazione di Jacobi.
M =
9 0 0
0 9 0
0 0 9
, N =
0 3 1
2 0 0
2 0 0
J := M−1N =
0 13
19
29
0 0
29
0 0
.
La matrice J e a termini positivi per cui le ipotesi del teoroma sono verificate.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.51/54

Esecizio 7 (segue ...)Calcoliamo il raggio spettrale di J:
det
−λ 13
19
29
−λ 0
29
0 −λ
= −λ3 +2
81λ +
2
27λ = λ
(
−λ2 +8
81
)
per cui gli autovalori sono λ1 = 0, λ2,3 = ± 29
√2 ' ±0.3143 ⇒ ρ(J) ' 0.3143 < 1, e per il
teorema di Stein-Rosemberg anche il raggio spettrale di Gauss-Seidel e minore 1 con
ρ(GS) < ρ(J) < 1. Verifichiamo:
M =
9 0 0
−2 9 0
−2 0 9
, N =
0 3 1
0 0 0
0 0 0
GS := M−1N =
19
0 0
281
19
0
281
0 19
0 3 1
0 0 0
0 0 0
=
0 13
19
0 227
281
0 227
281
=1
81
0 27 9
0 6 2
0 6 2
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.52/54

Esecizio 7 (segue ...)Calcoliamo il raggio spettrale di GS:
det
−λ 27 9
0 6 − λ 2
0 6 2 − λ
= −λ[(6 − λ)(2 − λ) − 12] = −λ2(λ − 8)
per cui gli autovalori sono λ1 = λ2 = 0, λ3 = 8 ⇒ ρ(GS) = 881
' 0.0988.
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.53/54
Esecizio 8Verificare le ipotesi del terorema di Stein-Rosemberg per la matrice A:
A =
1 0 0
−8 1 −2
−6 −3 6
,
e confrontare la convergenza del metodo di Jacobi e del metodo di Gauss-Seidel applicati ad A
analizzando i rispettivi raggi spettrali.
La condizione aii 6= 0 e soddisfatta per i = 1, 2, 3. Calcoliamo la matrice di iterazione di Jacobi.
J =
0 0 0
8 0 2
1 12
0
, det
−λ 0 0
8 −λ 2
1 12
−λ
= −λ3 + λ
per cui gli autovalori sono {0, 1,−1} e ρ(J) = 1 per il terorema di Stein-Rosemberg anche ρ(GS) = 1
quindi i due metodi applicati ad A non convergono
SISTEMI LINEARI QUADRATI:METODI ITERATIVI – p.54/54