STABILITA’ DEI SISTEMI LINEARI - Dispense … sistemi lineari la stabilità dell’intero sistema...
15
Definizione : lo stato di un sistema è rappresentato dalla quantità e distribuzione dell’energia all’interno del sistema, ed è riassumibile col valore assunto dalle variabili di stato. Lo studio del comportamento di un sistema si effettua esaminando l’evoluzione del suo stato. Quando il sistema permane in un determinato stato, cioè le sue variabili di stato permangono nei loro valori, lo stato è definito ‘stato di equilibrio’. Introduzione STABILITA’ DEI SISTEMI LINEARI Prof. Capuzzimati Mario - ITIS “Magistri Cumacini” - Como Stabilità dei sistemi lineari Lo stato di equilibrio può essere: • instabile: • stabile: 1 Stabile se vincolato nei movimenti laterali Il disturbo temporaneo fa cambiare stato al sistema. Il disturbo temporaneo provoca variazioni limitate dello stato (temporanee o permanenti).
Transcript of STABILITA’ DEI SISTEMI LINEARI - Dispense … sistemi lineari la stabilità dell’intero sistema...

Definizione lo stato di un sistema egrave rappresentato dalla quantitagrave e distribuzione dellrsquoenergia allrsquointerno delsistema ed egrave riassumibile col valore assunto dalle variabili di statoLo studio del comportamento di un sistema si effettua esaminando lrsquoevoluzione del suo statoQuando il sistema permane in un determinato stato cioegrave le sue variabili di stato permangono nei loro valorilo stato egrave definito lsquostato di equilibriorsquoLo stato di equilibrio puograve esserebull instabilebull stabile
Introduzione
STABILITArsquo DEI SISTEMI LINEARI
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari
Definizione lo stato di un sistema egrave rappresentato dalla quantitagrave e distribuzione dellrsquoenergia allrsquointerno delsistema ed egrave riassumibile col valore assunto dalle variabili di statoLo studio del comportamento di un sistema si effettua esaminando lrsquoevoluzione del suo statoQuando il sistema permane in un determinato stato cioegrave le sue variabili di stato permangono nei loro valorilo stato egrave definito lsquostato di equilibriorsquoLo stato di equilibrio puograve esserebull instabilebull stabile
1
Stabile sevincolato neimovimentilaterali
Il disturbo temporaneo facambiare stato al sistemaIl disturbo temporaneo provoca variazioni limitate dellostato (temporanee o permanenti)
Nei controlli industriali si pretende perograve che col venir meno della perturbazione lo stato ritorni a
quello di partenza in quanto diversamente la variabile controllata verrebbe a dipendere oltre chedallrsquoingresso di controllo anche dalle perturbazioni presentatesi in passatoNei sistemi la variabile controllata deve dipendere solo dallrsquoingresso di controllo (ingresso forzante)deve cioegrave essere descritta dai soli termini della componente forzata Solo cosigrave il controllore puogravecontrollare la variabile drsquouscita del sistemaCiograve equivale a pretendere che il sistema di controllo sia caratterizzato da una risposta libera chetenda ad estinguersi in seguito alla scomparsa della perturbazioneEsempio Risposta liberache si estingue
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari
2
Sistemax(t)
t
y(t)
Comparsadel disturbo
Scomparsadel disturbo
Esempio
t
t
Rispostalibera che siestingue
Esempio
Sistemax(t)
t t
Risposta liberache si estingue
y(t)
Nei sistemi lineari la stabilitagrave dellrsquointero sistema egrave garantita dalla stabilitagrave di un singolo stato di
equilibrio in quanto se la risposta libera si estingue a partire da uno stato si estingue a partire daqualsiasi altro stato di equilibrioCiograve non egrave vero per i sistemi non lineari Per essi lo studio della stabilitagrave dellrsquointero sistema richiedelo studio della stabilitagrave di ogni singolo stato di equilibrio che in questi sistemi dipendedallrsquoampiezza del disturboEsempio
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi Non Lineari
3
Nei sistemi lineari la stabilitagrave dellrsquointero sistema egrave garantita dalla stabilitagrave di un singolo stato di
equilibrio in quanto se la risposta libera si estingue a partire da uno stato si estingue a partire daqualsiasi altro stato di equilibrioCiograve non egrave vero per i sistemi non lineari Per essi lo studio della stabilitagrave dellrsquointero sistema richiedelo studio della stabilitagrave di ogni singolo stato di equilibrio che in questi sistemi dipendedallrsquoampiezza del disturboEsempio
Regolatore di WattI primi problemi seri di stabilitagrave dei sistemi emersero con la rivoluzione industriale quando James
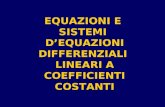
Watt cercograve di controllare la portata del vapore in relazione alla velocitagrave di rotazione della macchinaLa macchina a vapore infatti doveva funzionare a velocitagrave costante e ciograve richiedeva il controllo dellaportata del vapore Un meccanismo da inventareIn una lettera del 28 maggio 1788 Boulton descrisse a Watt il meccanismo del lift-tenter con cui neimulini a vento si regolava la distanza della pietra di macina superiore in relazione alla velocitagrave
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
4
Lift ndash tenter in un mulino avento del lsquo700 Prima dellasua introduzione il mugnaiodoveva regolare la distanza trale pietre di macinamanualmente per mezzo diuna leva
Watt intuigrave che quel meccanismo poteva essere adattato per controllare la velocitagrave della macchina avapore e costruigrave il regolatoreProf Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
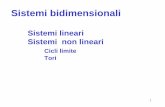
5Macchina di Watt-Boulton con reolgatore 1788
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
6
I primi regolatori di Watt funzionavano in modo soddisfacenteMa col passare dei primi decenni dellrsquo800 si osservograve un comportamento sempre meno soddisfacenteda parte dei nuovi regolatori sempre meno capaci di stabilizzare la velocitagrave e sempre piugrave inclini aprodurre pendolamenti nel valore della velocitagraveFino ad allora si era proceduto per via empirica senza mai affrontare il problema guardandolrsquoinsieme impianto + regolatoreInoltre in quei decenni furono costruiti anche altri tipi di regolatori di velocitagrave in fondo con gli stessiproblemi Come scegliere i parametri degli organi di trasmissione e del regolatore
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
7
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
8
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

Nei controlli industriali si pretende perograve che col venir meno della perturbazione lo stato ritorni a
quello di partenza in quanto diversamente la variabile controllata verrebbe a dipendere oltre chedallrsquoingresso di controllo anche dalle perturbazioni presentatesi in passatoNei sistemi la variabile controllata deve dipendere solo dallrsquoingresso di controllo (ingresso forzante)deve cioegrave essere descritta dai soli termini della componente forzata Solo cosigrave il controllore puogravecontrollare la variabile drsquouscita del sistemaCiograve equivale a pretendere che il sistema di controllo sia caratterizzato da una risposta libera chetenda ad estinguersi in seguito alla scomparsa della perturbazioneEsempio Risposta liberache si estingue
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari
2
Sistemax(t)
t
y(t)
Comparsadel disturbo
Scomparsadel disturbo
Esempio
t
t
Rispostalibera che siestingue
Esempio
Sistemax(t)
t t
Risposta liberache si estingue
y(t)
Nei sistemi lineari la stabilitagrave dellrsquointero sistema egrave garantita dalla stabilitagrave di un singolo stato di
equilibrio in quanto se la risposta libera si estingue a partire da uno stato si estingue a partire daqualsiasi altro stato di equilibrioCiograve non egrave vero per i sistemi non lineari Per essi lo studio della stabilitagrave dellrsquointero sistema richiedelo studio della stabilitagrave di ogni singolo stato di equilibrio che in questi sistemi dipendedallrsquoampiezza del disturboEsempio
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi Non Lineari
3
Nei sistemi lineari la stabilitagrave dellrsquointero sistema egrave garantita dalla stabilitagrave di un singolo stato di
equilibrio in quanto se la risposta libera si estingue a partire da uno stato si estingue a partire daqualsiasi altro stato di equilibrioCiograve non egrave vero per i sistemi non lineari Per essi lo studio della stabilitagrave dellrsquointero sistema richiedelo studio della stabilitagrave di ogni singolo stato di equilibrio che in questi sistemi dipendedallrsquoampiezza del disturboEsempio
Regolatore di WattI primi problemi seri di stabilitagrave dei sistemi emersero con la rivoluzione industriale quando James
Watt cercograve di controllare la portata del vapore in relazione alla velocitagrave di rotazione della macchinaLa macchina a vapore infatti doveva funzionare a velocitagrave costante e ciograve richiedeva il controllo dellaportata del vapore Un meccanismo da inventareIn una lettera del 28 maggio 1788 Boulton descrisse a Watt il meccanismo del lift-tenter con cui neimulini a vento si regolava la distanza della pietra di macina superiore in relazione alla velocitagrave
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
4
Lift ndash tenter in un mulino avento del lsquo700 Prima dellasua introduzione il mugnaiodoveva regolare la distanza trale pietre di macinamanualmente per mezzo diuna leva
Watt intuigrave che quel meccanismo poteva essere adattato per controllare la velocitagrave della macchina avapore e costruigrave il regolatoreProf Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
5Macchina di Watt-Boulton con reolgatore 1788
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
6
I primi regolatori di Watt funzionavano in modo soddisfacenteMa col passare dei primi decenni dellrsquo800 si osservograve un comportamento sempre meno soddisfacenteda parte dei nuovi regolatori sempre meno capaci di stabilizzare la velocitagrave e sempre piugrave inclini aprodurre pendolamenti nel valore della velocitagraveFino ad allora si era proceduto per via empirica senza mai affrontare il problema guardandolrsquoinsieme impianto + regolatoreInoltre in quei decenni furono costruiti anche altri tipi di regolatori di velocitagrave in fondo con gli stessiproblemi Come scegliere i parametri degli organi di trasmissione e del regolatore
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
7
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
8
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

Nei sistemi lineari la stabilitagrave dellrsquointero sistema egrave garantita dalla stabilitagrave di un singolo stato di
equilibrio in quanto se la risposta libera si estingue a partire da uno stato si estingue a partire daqualsiasi altro stato di equilibrioCiograve non egrave vero per i sistemi non lineari Per essi lo studio della stabilitagrave dellrsquointero sistema richiedelo studio della stabilitagrave di ogni singolo stato di equilibrio che in questi sistemi dipendedallrsquoampiezza del disturboEsempio
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi Non Lineari
3
Nei sistemi lineari la stabilitagrave dellrsquointero sistema egrave garantita dalla stabilitagrave di un singolo stato di
equilibrio in quanto se la risposta libera si estingue a partire da uno stato si estingue a partire daqualsiasi altro stato di equilibrioCiograve non egrave vero per i sistemi non lineari Per essi lo studio della stabilitagrave dellrsquointero sistema richiedelo studio della stabilitagrave di ogni singolo stato di equilibrio che in questi sistemi dipendedallrsquoampiezza del disturboEsempio
Regolatore di WattI primi problemi seri di stabilitagrave dei sistemi emersero con la rivoluzione industriale quando James
Watt cercograve di controllare la portata del vapore in relazione alla velocitagrave di rotazione della macchinaLa macchina a vapore infatti doveva funzionare a velocitagrave costante e ciograve richiedeva il controllo dellaportata del vapore Un meccanismo da inventareIn una lettera del 28 maggio 1788 Boulton descrisse a Watt il meccanismo del lift-tenter con cui neimulini a vento si regolava la distanza della pietra di macina superiore in relazione alla velocitagrave
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
4
Lift ndash tenter in un mulino avento del lsquo700 Prima dellasua introduzione il mugnaiodoveva regolare la distanza trale pietre di macinamanualmente per mezzo diuna leva
Watt intuigrave che quel meccanismo poteva essere adattato per controllare la velocitagrave della macchina avapore e costruigrave il regolatoreProf Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
5Macchina di Watt-Boulton con reolgatore 1788
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
6
I primi regolatori di Watt funzionavano in modo soddisfacenteMa col passare dei primi decenni dellrsquo800 si osservograve un comportamento sempre meno soddisfacenteda parte dei nuovi regolatori sempre meno capaci di stabilizzare la velocitagrave e sempre piugrave inclini aprodurre pendolamenti nel valore della velocitagraveFino ad allora si era proceduto per via empirica senza mai affrontare il problema guardandolrsquoinsieme impianto + regolatoreInoltre in quei decenni furono costruiti anche altri tipi di regolatori di velocitagrave in fondo con gli stessiproblemi Come scegliere i parametri degli organi di trasmissione e del regolatore
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
7
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
8
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

Regolatore di WattI primi problemi seri di stabilitagrave dei sistemi emersero con la rivoluzione industriale quando James
Watt cercograve di controllare la portata del vapore in relazione alla velocitagrave di rotazione della macchinaLa macchina a vapore infatti doveva funzionare a velocitagrave costante e ciograve richiedeva il controllo dellaportata del vapore Un meccanismo da inventareIn una lettera del 28 maggio 1788 Boulton descrisse a Watt il meccanismo del lift-tenter con cui neimulini a vento si regolava la distanza della pietra di macina superiore in relazione alla velocitagrave
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
4
Lift ndash tenter in un mulino avento del lsquo700 Prima dellasua introduzione il mugnaiodoveva regolare la distanza trale pietre di macinamanualmente per mezzo diuna leva
Watt intuigrave che quel meccanismo poteva essere adattato per controllare la velocitagrave della macchina avapore e costruigrave il regolatoreProf Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
5Macchina di Watt-Boulton con reolgatore 1788
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
6
I primi regolatori di Watt funzionavano in modo soddisfacenteMa col passare dei primi decenni dellrsquo800 si osservograve un comportamento sempre meno soddisfacenteda parte dei nuovi regolatori sempre meno capaci di stabilizzare la velocitagrave e sempre piugrave inclini aprodurre pendolamenti nel valore della velocitagraveFino ad allora si era proceduto per via empirica senza mai affrontare il problema guardandolrsquoinsieme impianto + regolatoreInoltre in quei decenni furono costruiti anche altri tipi di regolatori di velocitagrave in fondo con gli stessiproblemi Come scegliere i parametri degli organi di trasmissione e del regolatore
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
7
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
8
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

Watt intuigrave che quel meccanismo poteva essere adattato per controllare la velocitagrave della macchina avapore e costruigrave il regolatoreProf Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
5Macchina di Watt-Boulton con reolgatore 1788
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
6
I primi regolatori di Watt funzionavano in modo soddisfacenteMa col passare dei primi decenni dellrsquo800 si osservograve un comportamento sempre meno soddisfacenteda parte dei nuovi regolatori sempre meno capaci di stabilizzare la velocitagrave e sempre piugrave inclini aprodurre pendolamenti nel valore della velocitagraveFino ad allora si era proceduto per via empirica senza mai affrontare il problema guardandolrsquoinsieme impianto + regolatoreInoltre in quei decenni furono costruiti anche altri tipi di regolatori di velocitagrave in fondo con gli stessiproblemi Come scegliere i parametri degli organi di trasmissione e del regolatore
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
7
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
8
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
La macchina a vapore di Watt fu presto ulteriormente perfezionatabull Watt macchina a doppio effetto col vapore che spinge prima una faccia del pistone poi quellaoppostabull J Pichard (concorrente di Watt) sistema biella-manovella per trasformare il moto traslatorio delpistone in rotatorioCon questi miglioramenti la tecnologia del vapore penetrograve nei trasporti sia terresti che navalibull 1804 R Trevthick inaugurograve il primo viaggio di una locomotiva su rotaiabull 1819 il primo veliero munito di motore a vapore ausiliario1836 la prima nave mossa con solo motore a vaporeLa diffusione dellrsquoautomazione aveva sempre suscitato preoccupazione presso gli operai e i garzoni Spessosi verificarono isolati atti di protesta volti alla distruzione delle macchineMa nel 1811-1812 in Inghilterra la rivolta fu molto piugrave vasta Il movimento prese il nome dallrsquooperaio NedLud che sembra in un momento di rabbia aveva distrutto due telai meccanici nel 1779 Il ldquoluddismordquoaccomunograve operai manifatturieri (contro lrsquoautomatizzazione della produzione) e salariati agricoli (controtrebbiatrici automatiche)
6
I primi regolatori di Watt funzionavano in modo soddisfacenteMa col passare dei primi decenni dellrsquo800 si osservograve un comportamento sempre meno soddisfacenteda parte dei nuovi regolatori sempre meno capaci di stabilizzare la velocitagrave e sempre piugrave inclini aprodurre pendolamenti nel valore della velocitagraveFino ad allora si era proceduto per via empirica senza mai affrontare il problema guardandolrsquoinsieme impianto + regolatoreInoltre in quei decenni furono costruiti anche altri tipi di regolatori di velocitagrave in fondo con gli stessiproblemi Come scegliere i parametri degli organi di trasmissione e del regolatore
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
7
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
8
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

I primi regolatori di Watt funzionavano in modo soddisfacenteMa col passare dei primi decenni dellrsquo800 si osservograve un comportamento sempre meno soddisfacenteda parte dei nuovi regolatori sempre meno capaci di stabilizzare la velocitagrave e sempre piugrave inclini aprodurre pendolamenti nel valore della velocitagraveFino ad allora si era proceduto per via empirica senza mai affrontare il problema guardandolrsquoinsieme impianto + regolatoreInoltre in quei decenni furono costruiti anche altri tipi di regolatori di velocitagrave in fondo con gli stessiproblemi Come scegliere i parametri degli organi di trasmissione e del regolatore
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
7
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
8
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
8
Questi problemi furono indagatibull nel 1826 da J V Poncelet (1788 ndash 1867) ebull nel 1840 da G B Airy (inglese astronomo reale 1801 ndash 1892)Airy in particolare aveva applicato un regolatore ad un sistema di puntamento di un telescopio allrsquoosservatoriodi Greenwich per un controllo di velocitagrave al fine di compensare la rotazione terrestre ed estendere cosigrave il tempodi osservazione dei corpi celesti Ma in certe condizioni lrsquointero sistema diveniva sede di oscillazioni permanentiindesiderateSia Poncelet sia Airy dimostrarono che la dinamica del regolatore poteva essere descritta da equazioni
differenziali mettendo tuttavia in evidenza il fatto che era difficile risolverle e trarre informazioni utiliin fase di progettoNel 1851 Airy individuograve qualche condizione per la stabilitagrave del sistema ma lrsquoesposizione fu pocochiara e il suo lavoro fu ignoratoIntanto nel 1868 si potevano contare nella sola Inghilterra ben 75 000 regolatori con crescenti
problemi di pendolamento delle variabili controllateNel 1863 J C Maxwell (1831 - 1879) presso il Kingrsquos College di Londra fu chiamato a far parte diuna commissione incaricata di stabilire gli standards di misura di certe grandezze elettriche Eglicondusse esperimenti facendo uso di una macchina elettrica dotata di un complesso regolatore divelocitagrave e notograve le difficoltagrave di stabilizzazioneMaxwell presentograve alla Royal Society una sintesi dei suoi studi nel 1868 con lrsquoarticolo ldquoOn Governorsrdquo
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
9
Maxwell ldquoOn Governorsrdquo [Regolatore o Controllore]NB Maxwell si era giagrave interessato ai problemi di stabilitagrave studiando gli anelli di Saturno e giagraveallora lavorando con certe equazioni algebriche (biquadratiche) associate a quelledifferenziali aveva chiarito potendole risolvere che la stabilitagrave era legata al segno
delle soluzioni delle equazioni associate
Lrsquoarticolo comincia con la definizione di regolatoreldquoA governor is a part of a machine by means of which the velocity of the machine is kept nearly
uniform notwithstanding variations in the driving-power or the resistancerdquo[ Un regolatore egrave una parte della macchina per mezzo della quale la velocitagrave della macchina egravemantenuta approssimativamente costante nonostante le variazioni nella potenza del motore onella resistenza del carico ]Piugrave avanti prosegue con una indicazione di metodo
ldquoI propose at present without entering into any details of mechanism to direct the attention of
engineers and mathematicians to the dynamical theory of such governorsrdquo[ Io propongo in questo momento senza entrare nei dettagli del meccanismo di dirigerelrsquoattenzione degli ingegneri e dei matematici sulla teoria dinamica di tali regolatori ]
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
ω(t)
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
Disturbo
0aconek)t(d ta
0aconek)t(d ta
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
10
E subito dopo continualdquoIt will be seen that the motion of a machine with is governor consists in general of a uniform motion combined
with a disturbance wich may be espressed as the sum of several component motions These components may be
of four different kinds
1) The disturbance may continually increase
2) It may continually diminish
3) It may be an oscillation of continually increasing amplitude
4) It may be an oscillation of continually decreasing amplitude
The first and third cases are evidently inconsistent with the stability of the motion and the second and fourthalone are admissibile in a good governor This condition is mathematically equivalent to the condition that allthe possible roots and all the possible parts of the impossible roots of a certain equation shall be negativerdquo
t
t
NB queste formedrsquoondacorrispondono aun regolatoreinserito inretroazione soloquando la velocitagraveegrave prossima aquella desiderata
ω(t)
ω(t) 0contcosek)t(d t
0contcosek)t(d t
A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

A questo punto Maxwell confessaldquoI have not been able completely to determine these conditions for equations of a higher degree than the
third but I hope that the subject will obtain the attention of matematiciansrdquoAiry si era fermato davanti allrsquoimpossibilitagrave di risolvere le equazioni differenziali Maxwell si concentra suuna ldquocertain equationrdquo associata a quella differenziale e cerca il segno delle soluzioni senza risolverle masvolgendo calcoli con i coefficientiMaxwell scrive perograve che ha trovato un modo per conoscere il segno delle soluzioni dellrsquoequazione
caratteristica (ldquocertain equationrdquo) ma solo per equazioni fino al 3deg ordine e si augura che i matematiciprestino maggiore attenzione al problemaMaxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
11
ldquoThe actual motions corresponding to these impossible roots are not generally taken notice of by the inventors ofsuch machines who naturally confine their attention to the way in which it is designed to act and this isgenerally expressed by the real root of the equation If by altering the adjustments of the machine its governingpower is continually increased there is generally a limit at which the disturbance instead of subsiding morerapidly becomes an oscillating and jerking motion increasing in violence till it reaches the limit of action of thegovernor This takes place when the possible part of one of the impossible roots becomes positiverdquo
[I moti effettivi corrispondenti a queste radici non reali non sono genericamente presi in considerazione dagliinventori di tali macchine i quali naturalmente limitano la loro attenzione ad una modalitagrave di regime infunzione della quale la macchina viene progettata e che corrisponde in genere alla radice realedellrsquoequazione Se agendo sui comandi della macchina la potenza viene aumentata in modo continuo siincontra genericamente una soglia a cui il disturbo invece che attenuarsi piugrave rapidamente diventa un motooscillatorio e irregolare aumentando la sua forza finchegrave non raggiunge il limite di azione del regolatoreQuesto accade quando la parte reale di una delle radici non reali diventa positiva ]
Maxwell prosegue descrivendo lrsquoorigine dellrsquoinstabilitagrave non compresa dagli ingegneri
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Regolatore di Watt
12
Lo scritto di Maxwell non ebbe molta fortuna presso gli ingegneri forse per la trattazione un porsquo troppoastrattaPiugrave fortuna ebbe lo scritto quasi contemporaneo del russo J Vischnegradski giunto alle stesse conclusioni diMaxwell La traduzione del suo scritto in tedesco nel 1876 e francese nel 1877 fornigrave negli anni successivi utiliindicazioni pratiche agli ingegneri per migliorare le prestazioni dei regolatori di velocitagraveIl problema sollevato da Maxwell relativo alla ricerca di un procedimento generale per conoscere il segnodelle soluzioni dellrsquoequazione caratteristica senza risolverle fu presto risolto dal suo collega di Cambridge ilmatematico E J Routh (1831 ndash 1907) che nel 1877 pubblicograve un esteso trattato ldquoStability of motionrdquoNel 1895 alle stesse conclusioni di Routh giunse per via indipendente il matematico svizzero A Hurwitz(1859 ndash 1919) che era stato avvicinato al problema dallrsquoingegnere A B Stodola (1859 ndash 1942) suo collega alPolitecnico di Zurigo Stodola impegnato nella stabilizzazione di una turbina gli aveva mostrato il lavoro diVischnegradskiNellrsquoesposizione di Hurwitz il metodo per il calcolo del segno delle soluzioni dellrsquoequazione caratteristicaappare piugrave semplice Questo metodo egrave oggi conosciuto come metodo di Routh-HurwitzNB con Maxwell divenne chiaro il motivo per cui i nuovi regolatori funzionavano peggio di quelli vecchi ilmiglioramento della tecnologia meccanica realizzava dispositivi con meno attriti interni ed era proprio ladiminuzione degli attriti nei regolatori che facilitava lrsquoinnesco dei pendolamenti
Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

Metodo di Routh - Hurwitz
Data la seguente equazione caratteristicaCondizione necessaria ma non sufficiente affichegrave tutte le radici siano a parte reale negativa egrave che i
coefficienti abbiano tutti lo stesso segno
0asasasa 011n
1nn
n
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabella
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
13
Il metodo permette la determinazione del segno delle radici senza risolvere lrsquoequazione caratteristicasi costruisce la seguente tabellan an an-2 an-4 hellip
n-1 an-1 an-3 an-5 hellip
n-2 b1 b2 helliphellip hellip
hellip c1 hellip hellip hellip
0 hellip
1n
3nn2n1n1 a
aaaab
1n
5nn4n1n2 a
aaaab
1
21n3n11 b
baabc
Regola ad ogni variazione di segno tra i termini consecutivi della prima colonna presentano corrispondeuna radice con parte reale positiva ad ogni permanenza una radice con parte reale negativa
ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

ESEMPIO
+_ A
10
1s5s2s123
1) Verificare la stabilitagrave per A = 402) Calcolare il valore limite di A per cuiil sistema si mantiene stabileSoluzione occorre calcolare lrsquoequazione caratteristica del sistema
3 1 5
010A1s5s2s 23
1)
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
14
3 1 5
2 2 1+4
1 25 0
0 5
Non essendoci variazioni di segno nella prima colonna lesoluzioni hanno parte reale negativa e quindi il sistema egravestabile
1)
2) 3 1 5
2 2 1 + A01
1 45 - A005 0
0 1 + A01
Per la stabilitagrave non devono esserci variazioni disegno nella prima colonna
10A90A
010A10050A54
Il guadagno negativo non ha significato pratico percui A lt 90
ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A

ESEMPIO
+_ A
10
Calcolare il valore dellrsquointervallo di A percui il sistema si mantiene stabile
Soluzione equazione caratteristica del sistema
3s2s1
010A6ss2
Prof Capuzzimati Mario - ITIS ldquoMagistri Cumacinirdquo - ComoStabilitagrave dei sistemi lineari - Metodo di Routh-Hurwitz
15
Soluzione equazione caratteristica del sistema2 1 -6 + A01
1 1
0 -6 + A01
Per la stabilitagrave deve essere
NB in questo esempio il sistema complessivo egrave tanto piugrave stabile quanto maggiore egrave il guadagno La causa egraveda ricercarsi nellrsquoinstabilitagrave del blocco del ramo diretto la retroazione unita a un alto guadagno stabilizza ilsistema
010A6ss2
010A6
Da cui 60A