Analisi Modale
36
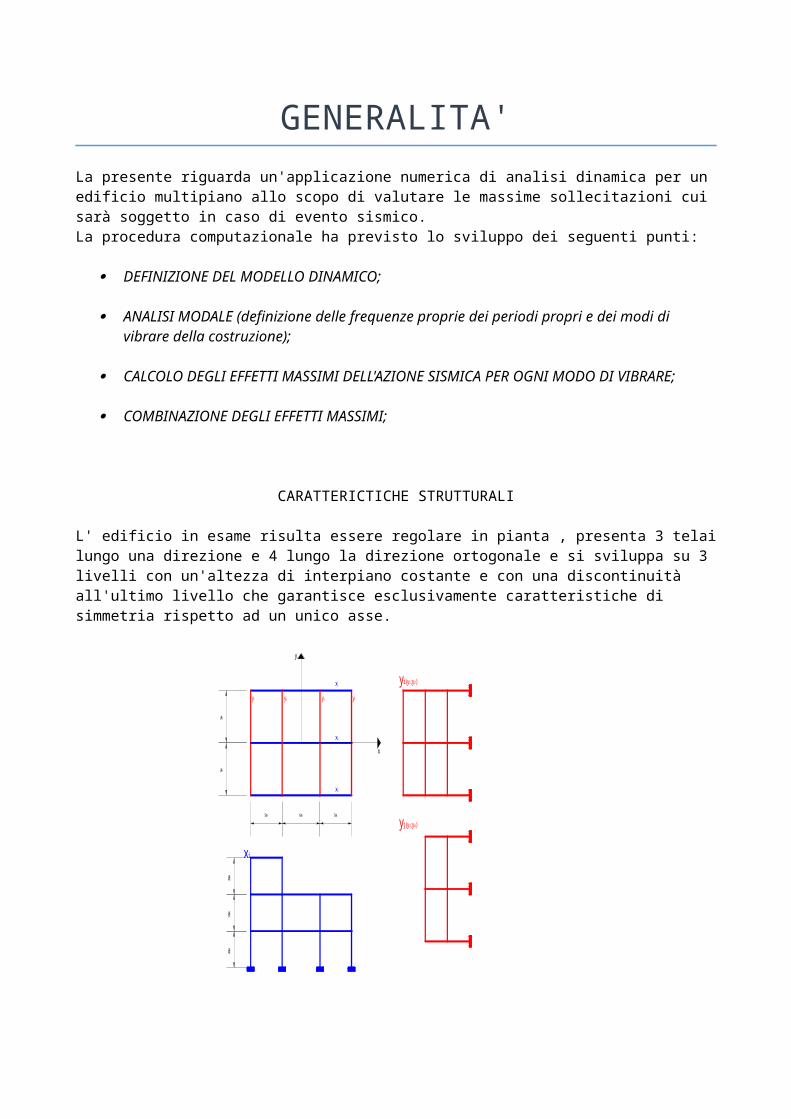
GENERALITA' La presente riguarda un'applicazione numerica di analisi dinamica per un edificio multipiano allo scopo di valutare le massime sollecitazioni cui sarà soggetto in caso di evento sismico. La procedura computazionale ha previsto lo sviluppo dei seguenti punti: DEFINIZIONE DEL MODELLO DINAMICO; ANALISI MODALE (definizione delle frequenze proprie dei periodi propri e dei modi di vibrare della costruzione); CALCOLO DEGLI EFFETTI MASSIMI DELL'AZIONE SISMICA PER OGNI MODO DI VIBRARE; COMBINAZIONE DEGLI EFFETTI MASSIMI; CARATTERICTICHE STRUTTURALI L' edificio in esame risulta essere regolare in pianta , presenta 3 telai lungo una direzione e 4 lungo la direzione ortogonale e si sviluppa su 3 livelli con un'altezza di interpiano costante e con una discontinuità all'ultimo livello che garantisce esclusivamente caratteristiche di simmetria rispetto ad un unico asse. x y 5m 6m 5m 5m 5m y1 y2 y3 y4 x1 x2 x3 x i y i (y1;y2) y j (y3;y4) 3.5m 3.5m 3.5m
-
Upload
salvatore-iolli -
Category
Documents
-
view
402 -
download
5
Transcript of Analisi Modale
GENERALITA'La presente riguarda un'applicazione numerica di analisi dinamica per un edificio multipiano allo scopo di valutare le massime sollecitazioni cui sarà soggetto in caso di evento sismico.La procedura computazionale ha previsto lo sviluppo dei seguenti punti:
DEFINIZIONE DEL MODELLO DINAMICO;
ANALISI MODALE (definizione delle frequenze proprie dei periodi propri e dei modi di vibrare della costruzione);
CALCOLO DEGLI EFFETTI MASSIMI DELL'AZIONE SISMICA PER OGNI MODO DI VIBRARE;
COMBINAZIONE DEGLI EFFETTI MASSIMI;
CARATTERICTICHE STRUTTURALI
L' edificio in esame risulta essere regolare in pianta , presenta 3 telai lungo una direzione e 4 lungo la direzione ortogonale e si sviluppa su 3 livelli con un'altezza di interpiano costante e con una discontinuità all'ultimo livello che garantisce esclusivamente caratteristiche di simmetria rispetto ad un unico asse.
x
y
5m 6m 5m
5m5m
y1 y2 y3 y4
x1
x2
x3
xi
yi (y1;y2)
yj (y3;y4)
3.5m
3.5m
3.5m
Dimensioni dei pilastri [m]:
P1= pilastri primo piano 0.5×0.5
P2= pilastri secondo piano 0.4×0.4
P3=pilastri terzo piano 0.3×0.3
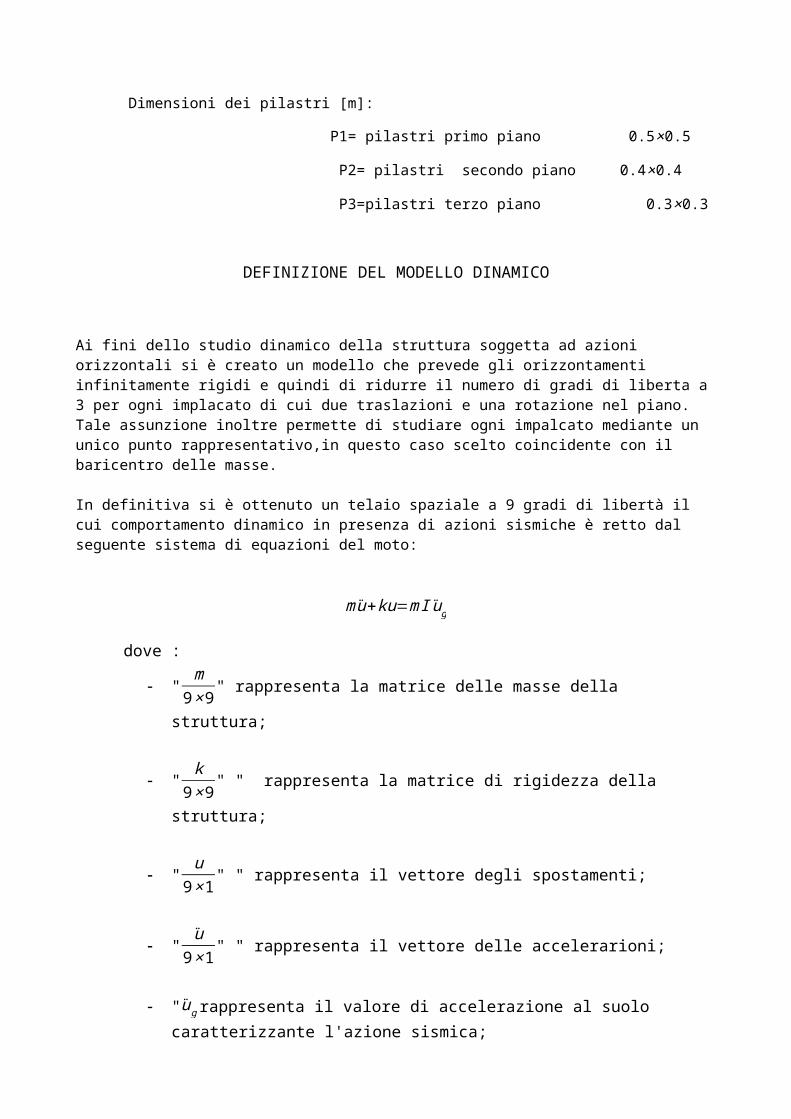
DEFINIZIONE DEL MODELLO DINAMICO
Ai fini dello studio dinamico della struttura soggetta ad azioni orizzontali si è creato un modello che prevede gli orizzontamenti infinitamente rigidi e quindi di ridurre il numero di gradi di liberta a 3 per ogni implacato di cui due traslazioni e una rotazione nel piano.Tale assunzione inoltre permette di studiare ogni impalcato mediante un unico punto rappresentativo,in questo caso scelto coincidente con il baricentro delle masse.
In definitiva si è ottenuto un telaio spaziale a 9 gradi di libertà il cui comportamento dinamico in presenza di azioni sismiche è retto dal seguente sistema di equazioni del moto:
m u+ku=m I ug
dove :
"m
9 ×9" rappresenta la matrice delle masse della struttura;
"k
9 ×9" " rappresenta la matrice di rigidezza della struttura;
"u
9 ×1" " rappresenta il vettore degli spostamenti;
"u
9 ×1" " rappresenta il vettore delle accelerarioni;
"ug rappresenta il valore di accelerazione al suolo caratterizzante l'azione sismica;
"I
9 ×1" " rappresenta un vettore direzionale dell'azione simica di componenti unitarie
utilizzato per rendere il valore scalare di ug conforme al prodotto con la matrice delle masse;
Avendo scelto di eseguire la trattazione di tale problema adottando come parametri cinematici gli spostamenti assoluti la matrice delle masse del sistema è risultata essere diagonale mentre quella di rigidezza piena e per definizione positiva e simmetria.
Di seguito si riporta la procedura utilizzata per determinazione delle suddette matrici.
MATRICE DELLE MASSE
Avendo scelto di organizzare il vettore degli spostamenti come segue:
La matrice delle masse è una matrice 9×9 diagonale dove le componenti non nulle rappresentano le masse degli impalcati traslazionali e rotazionali.
Le masse traslazionali lungo le due direzioni ortogonali sono uguali e sono state calcolate considerando una massa per unita di superficie di:
M =1000 Kg
m2
per quanto attiene alle masse rotazionali queste sono state calcolate come segue:
mi∅=mi× ρ2
dove:ui= spostamento lungo x dell' i-esimo impalcato;v i= spostamento lungo y dell' i-esimo impalcato;∅ i= spostamento lungo ∅ dell' i-esimo impalcato;
dove:
mi x= massa traslazionale lungo x dell' i-esimo impalcato;
mi y= massa traslazionale lungo ydell' i-esimo impalcato;
mi∅= massa traslazionale lungo ∅ dell' i-esimo impalcato;
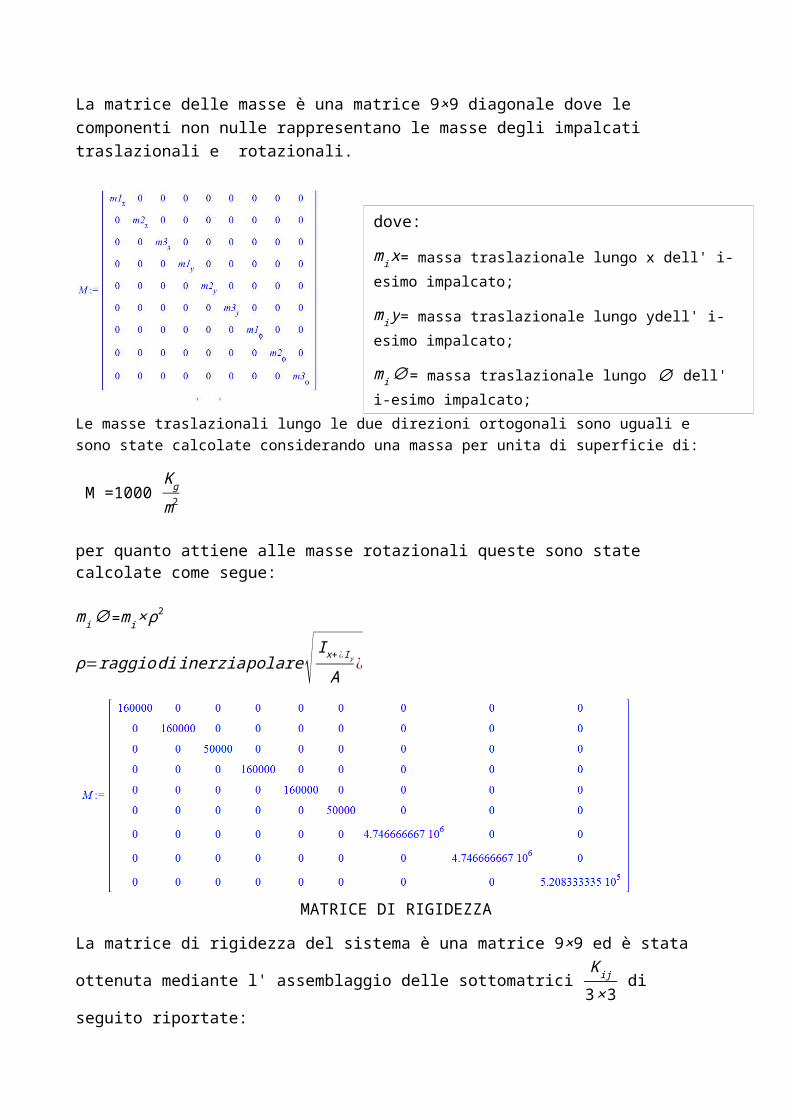
ρ=raggio di inerzia polare √ I x+¿ I y
A¿
MATRICE DI RIGIDEZZA
La matrice di rigidezza del sistema è una matrice 9×9 ed è stata ottenuta mediante l' assemblaggio
delle sottomatrici K ij
3× 3 di seguito riportate:
K ij
3× 3= rappresenta gli enti forza che nascono lungo i telai in direzione i per effetto di spostamenti
unitari dei telai in direzione j;
K xx
3× 3 = ∑
i
n
kxi;
dove k xi è la matrice di rigidezza del telaio X i che per le ipotesi fatte può essere considerato un telaio SHEAR-TYPE ed è stata ricavata mediante il metodo diretto che prevede l'utilizzo di vincoli ausiliari e consente di ricavare la stessa per colonna.
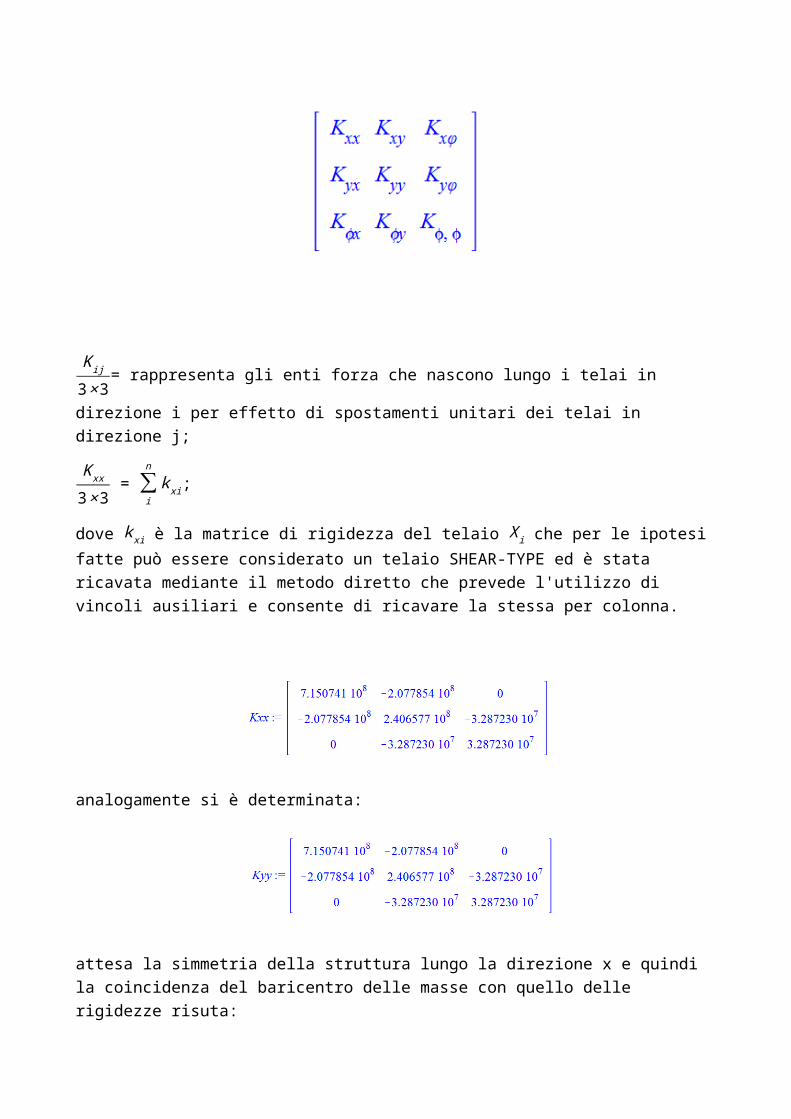
analogamente si è determinata:
attesa la simmetria della struttura lungo la direzione x e quindi la coincidenza del baricentro delle masse con quello delle rigidezze risuta:
K xy
3× 3=
K yxT
3× 3=0
K x∅
3× 3=
K∅ xT
3 ×3=0
Per quanto concerne alla valutazione delle matrici:
K y∅
3× 3 = ∑
i
ni
k yi D xi+∑j
m j
k yj D xj=K∅ y
T
3 ×3
K∅ ∅
3× 3 = ∑
i
ni
D xi k yi D xi+∑j
m j
D xJ k yj Dxj+ ∑i
n
kxi d y i2
sono state create delle matrici D xi
3× 3 che rappresentano la variazione in altezza delle distanze
calcolate lungo la direzione x dei telai y i dal baricentro degli impalcati:
K y∅
3× 3=

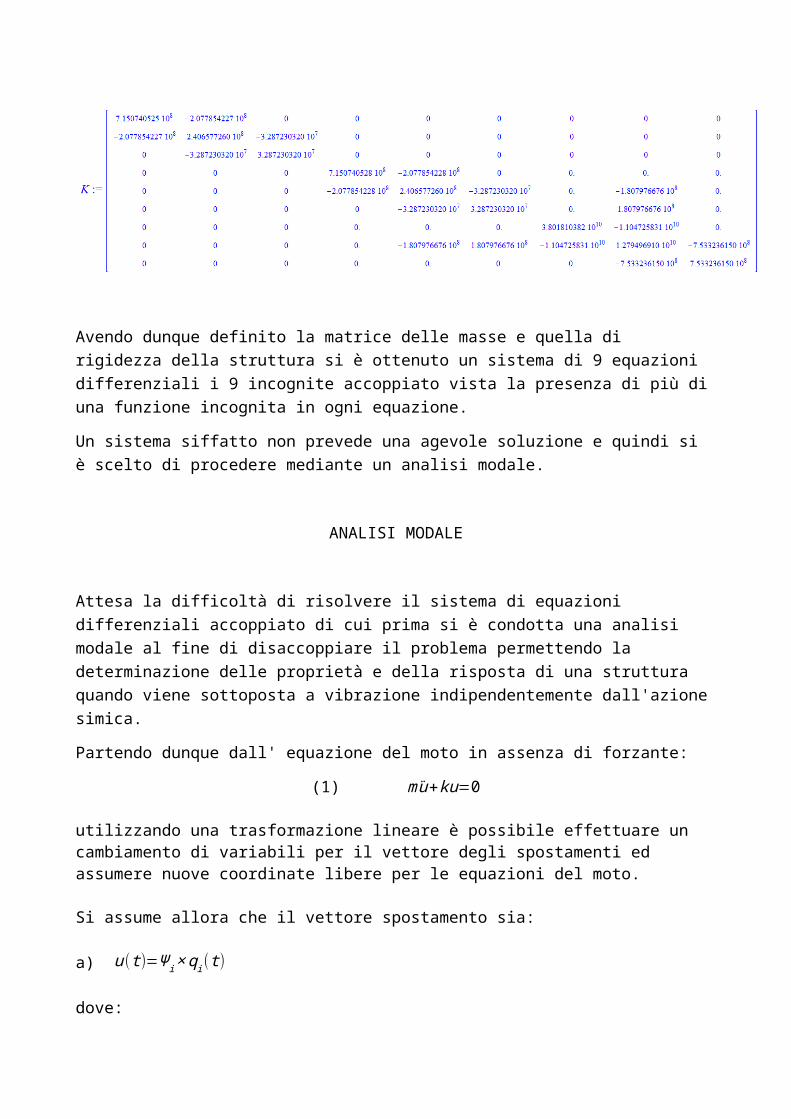
In seguito all' assemblaggio si e ottenuta la matrice di rigidezza globale della struttura:
Avendo dunque definito la matrice delle masse e quella di rigidezza della struttura si è ottenuto un sistema di 9 equazioni differenziali i 9 incognite accoppiato vista la presenza di più di una funzione incognita in ogni equazione.
Un sistema siffatto non prevede una agevole soluzione e quindi si è scelto di procedere mediante un analisi modale.
ANALISI MODALE
Attesa la difficoltà di risolvere il sistema di equazioni differenziali accoppiato di cui prima si è condotta una analisi modale al fine di disaccoppiare il problema permettendo la determinazione delle proprietà e della risposta di una struttura quando viene sottoposta a vibrazione indipendentemente dall'azione simica.
Partendo dunque dall' equazione del moto in assenza di forzante:
(1) m u+ku=0
utilizzando una trasformazione lineare è possibile effettuare un cambiamento di variabili per il vettore degli spostamenti ed assumere nuove coordinate libere per le equazioni del moto.
Si assume allora che il vettore spostamento sia:
a) u(t )=Ψ i ×q i(t)
dove:
K∅ ∅
3× 3=¿
Ψ i = vettore di scalari che rappresenta la distribuzione spaziale degli spostamenti;
q i(t) = funzione scalare del tempo che dovendo rappresentare il moto di oscillazioni libere in assenza di smorzamento e una funzione armonica del tipo:
q i(t) =C isin (ω¿¿ i t+φ)¿
Con tale posizione vengono assegnate le caratteristiche vettoriali del vettore spostamento a Ψ i e la dipendenza dal tempo a alla funzione scalare q i(t) disaccoppiando dunque la dipendenza dal tempo dalla distribuzione spaziale degli spostamenti.
Sostituendo nella equazione del moto la (a) si ottiene:
(2) ¿+ k)Ψ i=0
un sistema di equazioni omogeneo nelle incognite Ψ j i con j=1... n (GDL) che ammette sicuramente soluzione banale ( Ψ j i=0) .Per ottenere una soluzione diversa da quella banale è necessario imporre che la matrice dei coefficienti sia singolare:
(3) det [−m ωi2+ k]¿0
Sviluppando la (3) si ottiene un'equazione caratteristica nelle incognite ωi2.
Attesa la positività della matrice di rigidezza e di quella delle masse le radici dell' equazione caratteristica risultano essere sicuramente reali e positive che rappresentano gli AUTOVALORI del problema.
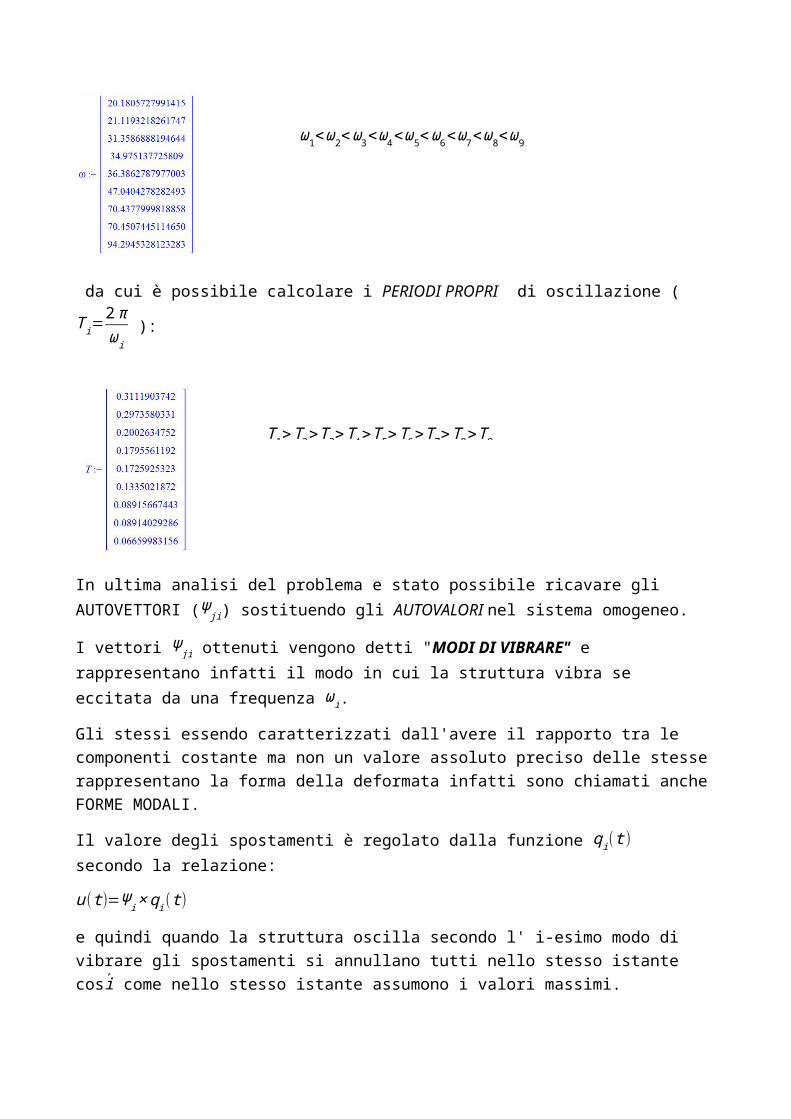
E stato allora possibile ricavare le ωi che rappresentano le FREQUENZE PROPRIE di vibrazione della struttura:
da cui è possibile calcolare i PERIODI PROPRI di oscillazione (T i=2 πωi
):
ω1<ω2<ω3<ω4<ω5<ω6<ω7<ω8<ω9
In ultima analisi del problema e stato possibile ricavare gli AUTOVETTORI (Ψ ji) sostituendo gli AUTOVALORI nel sistema omogeneo.
I vettori Ψ ji ottenuti vengono detti "MODI DI VIBRARE" e rappresentano infatti il modo in cui la struttura vibra se eccitata da una frequenza ωi.
Gli stessi essendo caratterizzati dall'avere il rapporto tra le componenti costante ma non un valore assoluto preciso delle stesse rappresentano la forma della deformata infatti sono chiamati anche FORME MODALI.
Il valore degli spostamenti è regolato dalla funzione q i(t) secondo la relazione:
u(t )=Ψ i ×q i(t)
e quindi quando la struttura oscilla secondo l' i-esimo modo di vibrare gli spostamenti si annullano tutti nello stesso istante cos i come nello stesso istante assumono i valori massimi.
Le q i(t) sono dette anche coordinate principali perchè nell'oscillazione del sistema secondo
l' i-esimo modo di vibrare risulta diversa da 0 la sola coordinata i-esima.
Questo risultato è di fondamentale importanza ai fini dello studio dinamico di una struttura perchè una qualsiasi deformata della struttura può essere vista come combinazione delle deformate modali.
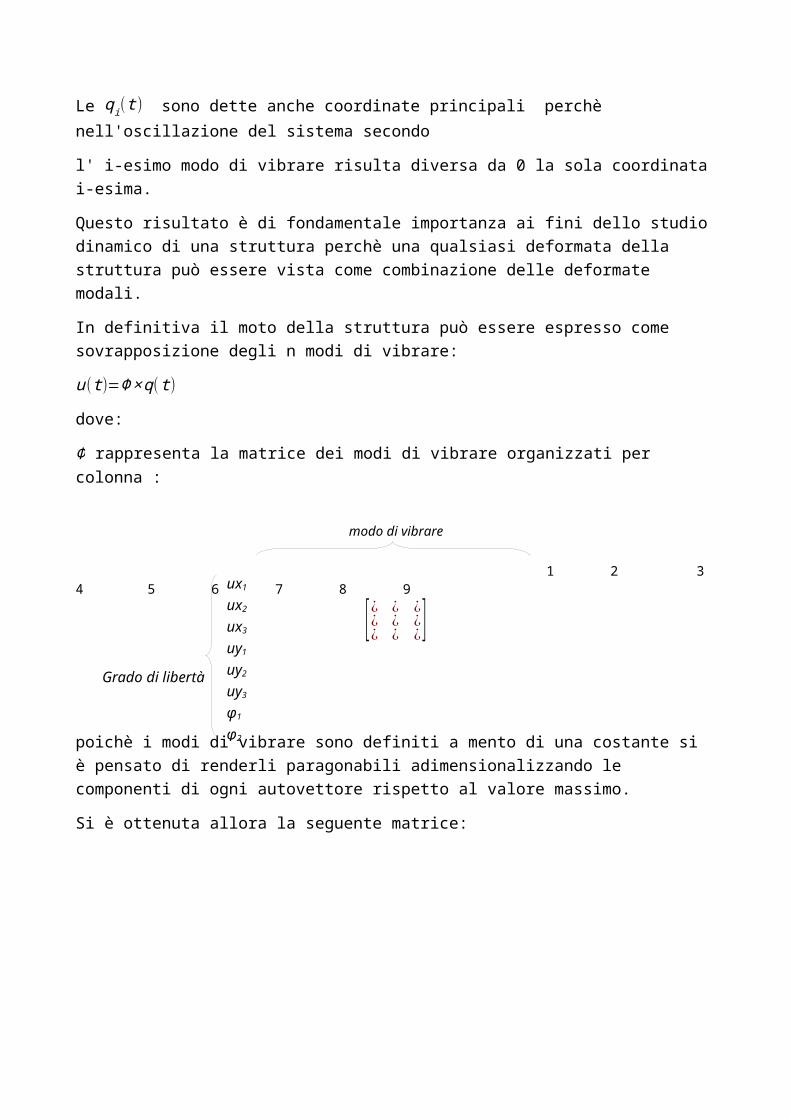
In definitiva il moto della struttura può essere espresso come sovrapposizione degli n modi di vibrare:
u(t )=Φ× q(t )
dove:
Φ rappresenta la matrice dei modi di vibrare organizzati per colonna :
modo di vibrare
1 2 3 4 5 6 7 8 9
[¿ ¿ ¿¿ ¿ ¿¿ ¿ ¿]
T 1>T 2>T 3>T 4>T5>T 6>T 7>T 8>T 9
ux1
ux2
ux3
uy1
uy2
uy3
φ1
φ2
φ3
Grado di libertà
poichè i modi di vibrare sono definiti a mento di una costante si è pensato di renderli paragonabili adimensionalizzando le componenti di ogni autovettore rispetto al valore massimo.
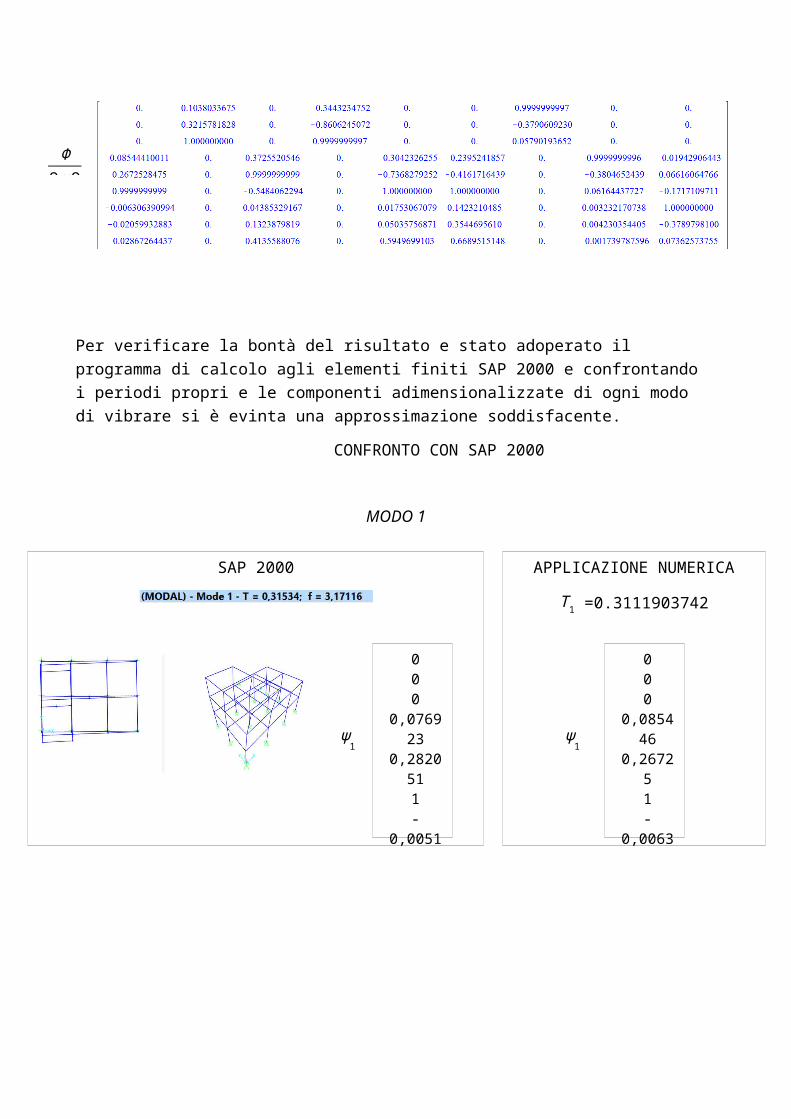
Si è ottenuta allora la seguente matrice:
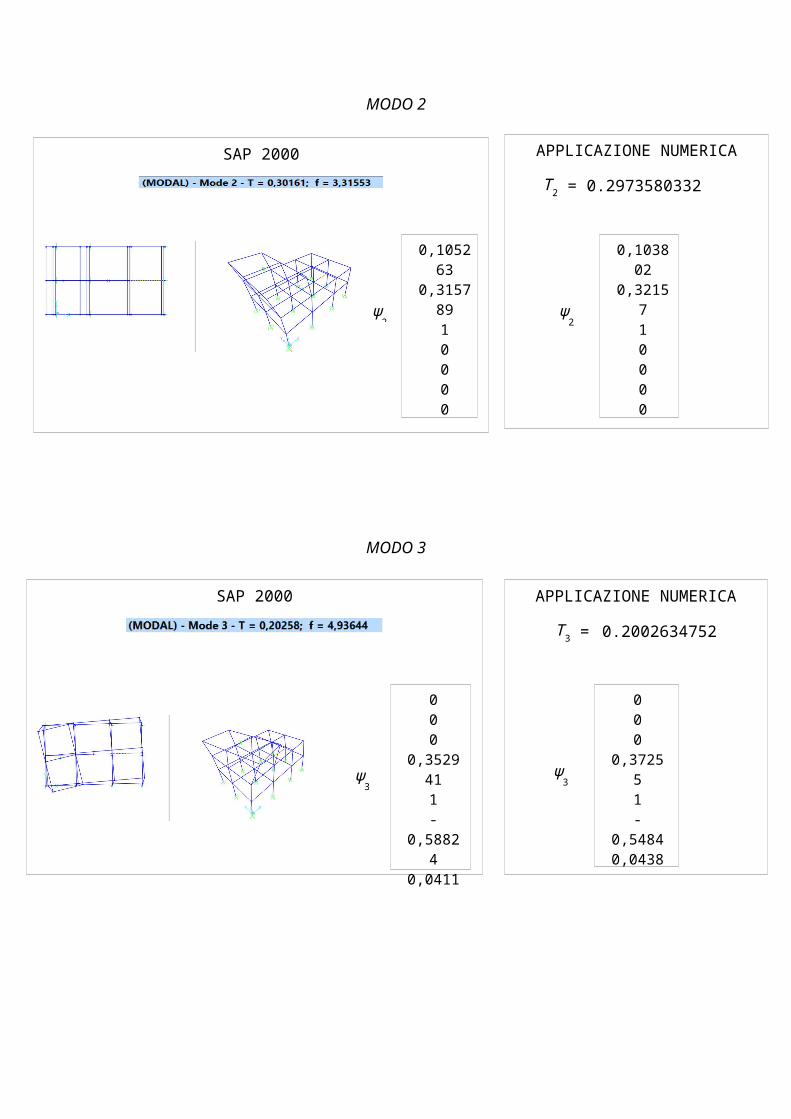
Per verificare la bontà del risultato e stato adoperato il programma di calcolo agli elementi finiti SAP 2000 e confrontando i periodi propri e le componenti adimensionalizzate di ogni modo di vibrare si è evinta una approssimazione soddisfacente.
CONFRONTO CON SAP 2000
MODO 1
Φ9 ×9
SAP 2000 APPLICAZIONE NUMERICA
T 1 =0.3111903742
Ψ1=
000
0,0769230,282051
1-0,00513-0,02051-0,02821
Ψ 1
=
000
0,0854460,26725
1-0,00631-0,0206
-0,02867
Ψ 1
MODO 2
MODO 3
SAP 2000 APPLICAZIONE NUMERICA
T 2 = 0.2973580332
0,1052630,315789
1000000
0,1038020,32157
1000000
Ψ 2 Ψ 2
SAP 2000
000
0,3529411
-0,588240,0411760,1235290,358824
Ψ 3
APPLICAZIONE NUMERICA
T 3 = 0.2002634752
000
0,372551
-0,54840,0438550,135110,41356
Ψ 3
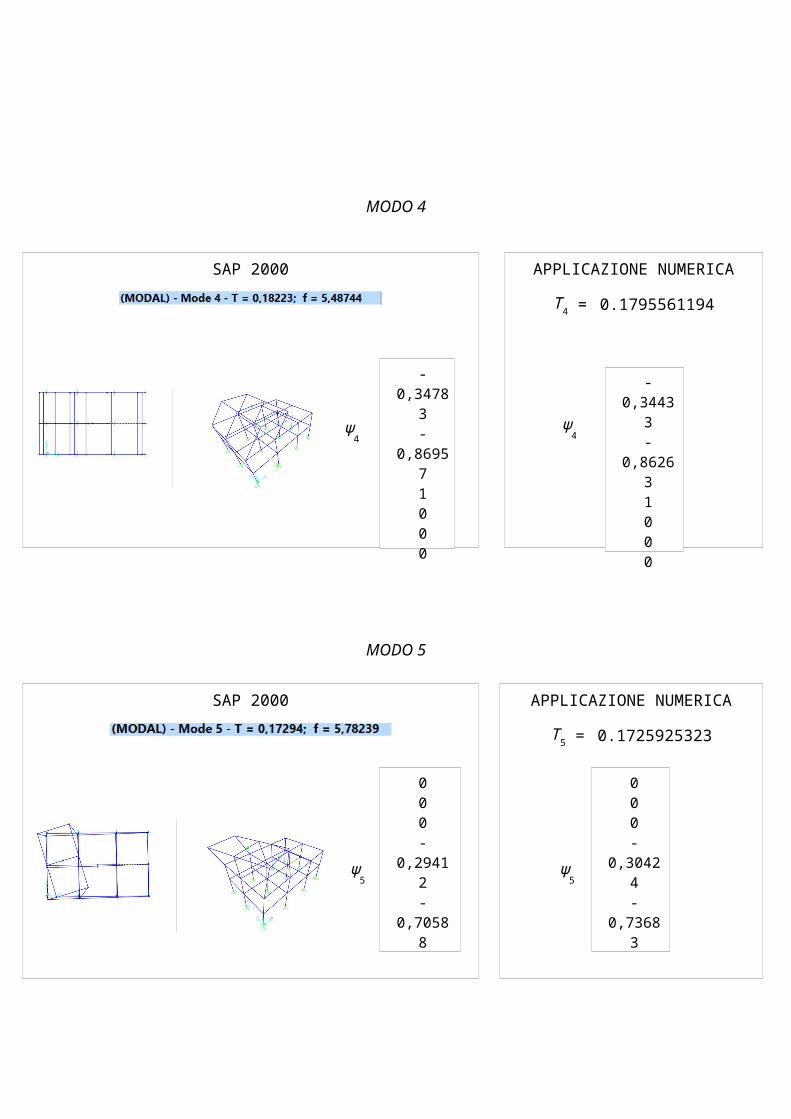
MODO 4
MODO 5
SAP 2000 APPLICAZIONE NUMERICA
T 4 = 0.1795561194
-0,34783-0,86957
1000000
-0,34433-0,86263
1000000
Ψ 4Ψ 4
SAP 2000 APPLICAZIONE NUMERICA
T 5 = 0.1725925323
000
-0,29412-0,70588
10,2352940,0647060,594118
000
-0,30424-0,73683
10,1753
0,050360,59497
Ψ 5Ψ 5
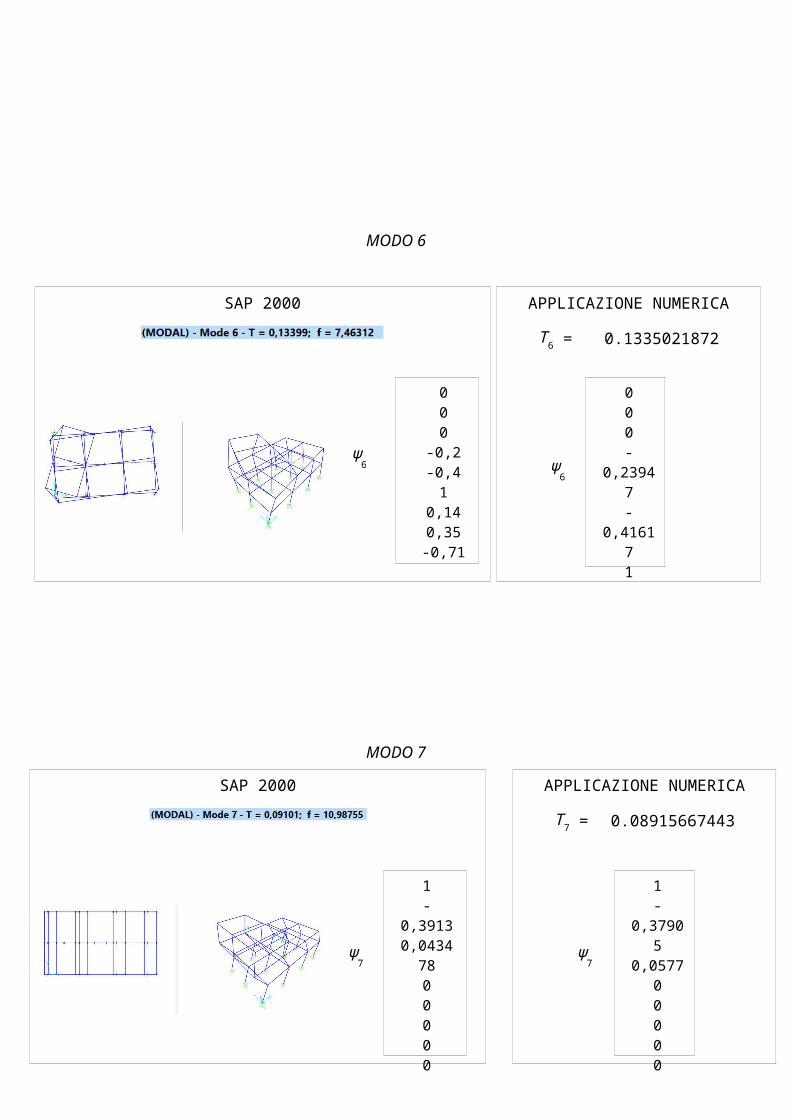
MODO 6
MODO 7
SAP 2000
000
-0,2-0,4
10,140,35-0,71
Ψ 6
APPLICAZIONE NUMERICA
T 6 = 0.1335021872
000
-0,23947-0,41617
10,142320,354470,66895
Ψ 6
SAP 2000 APPLICAZIONE NUMERICA
T 7 = 0.08915667443
1-0,3913
0,043478000000
1-0,379050,0577
000000
Ψ 7 Ψ 7
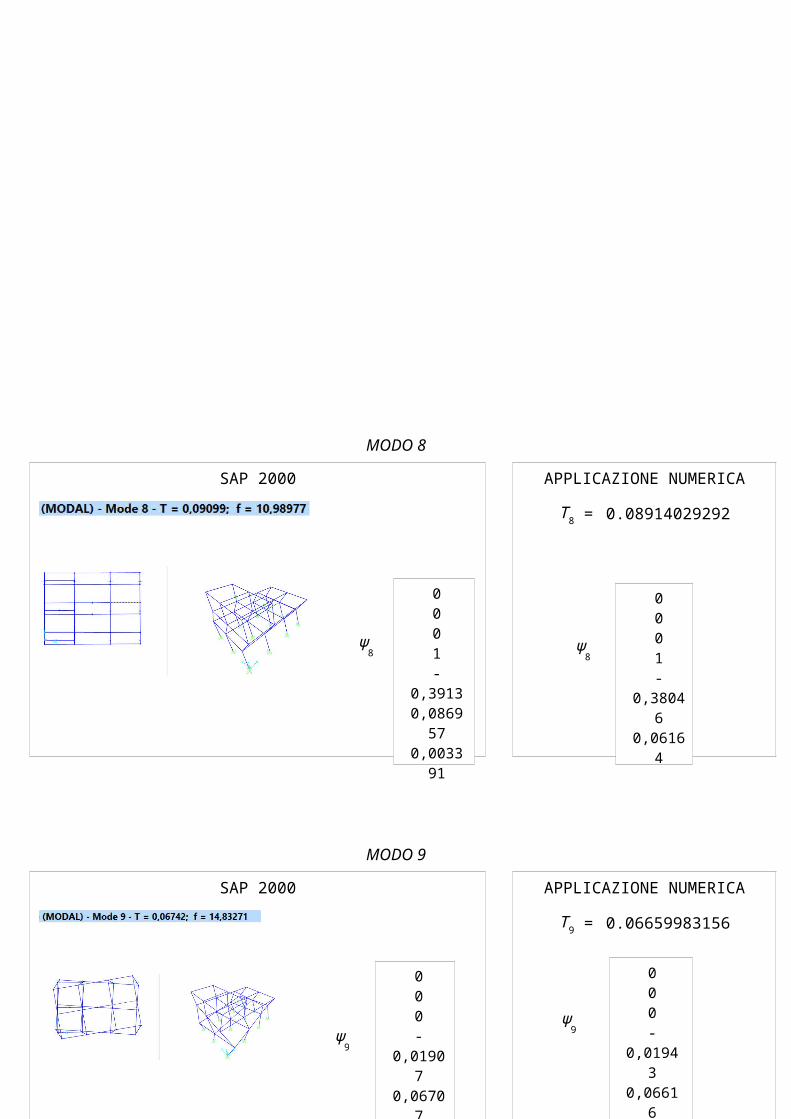
MODO 8
MODO 9
SAP 2000 APPLICAZIONE NUMERICA
T 8 = 0.08914029292
0001
-0,39130,0869570,0033910,004348-0,00204
0001
-0,380460,06164
0,0032270,004231-0,00174
Ψ 8 Ψ 8
SAP 2000 APPLICAZIONE NUMERICA
T 9 = 0.06659983156
000
-0,019070,06707-0,17442
1-0,372090,069767
000
-0,019430,06616-0,17171
1-0,378970,073624
Ψ 9
Ψ 9
DISACCOPPIAMENTO DELLE EQUAZIONI DEL MOTO
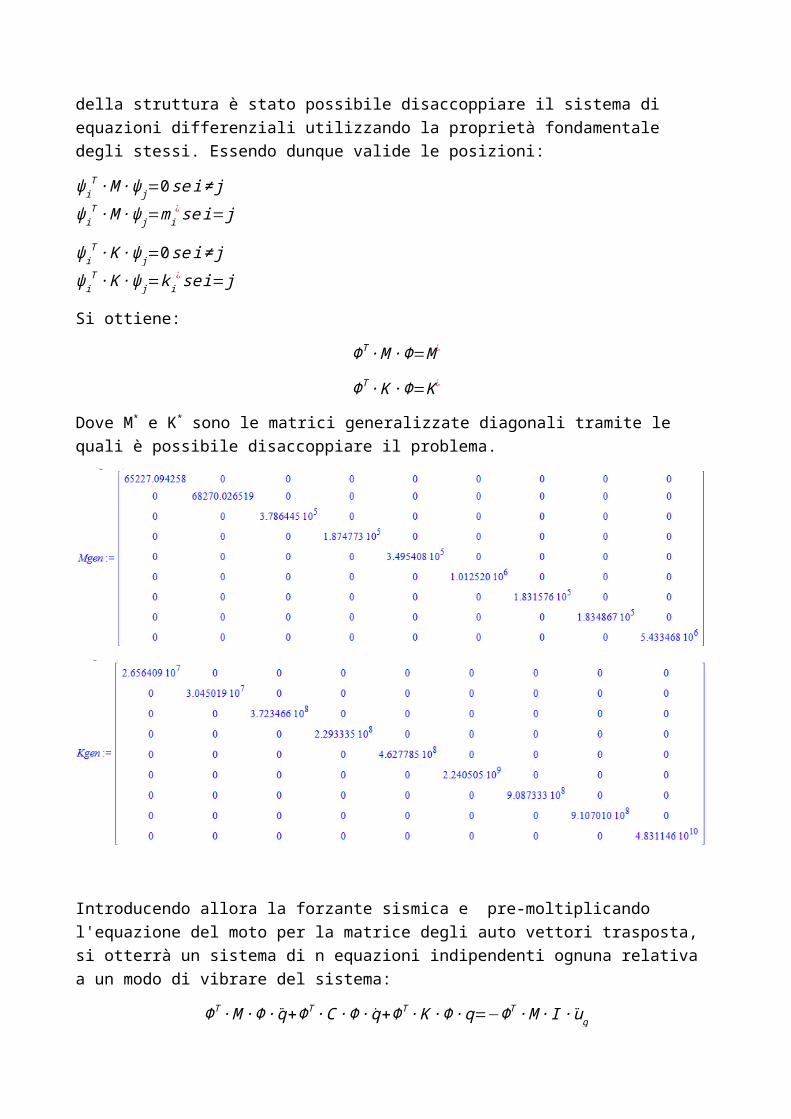
Avendo definito gli autovettori del sistema rappresentanti la distribuzione spaziale degli spostamenti ossia i modi di vibrare della struttura è stato possibile disaccoppiare il sistema di equazioni differenziali utilizzando la proprietà fondamentale degli stessi. Essendo dunque valide le posizioni:
ψ iT ∙ M ∙ψ j=0 se i ≠ j ψ i
T ∙ M ∙ψ j=mi¿ se i= j
ψ iT ∙ K ∙ ψ j=0 se i ≠ j ψ i
T ∙ K ∙ ψ j=k i¿se i= j
Si ottiene:
ΦT ∙M ∙Φ=M ¿
ΦT ∙K ∙Φ=K ¿
Dove M* e K* sono le matrici generalizzate diagonali tramite le quali è possibile disaccoppiare il problema.
Introducendo allora la forzante sismica e pre-moltiplicando l'equazione del moto per la matrice degli auto vettori trasposta, si otterrà un sistema di n equazioni indipendenti ognuna relativa a un modo di vibrare del sistema:
ΦT ∙M ∙Φ∙ q+ΦT ∙ C ∙Φ∙ q+ΦT ∙ K ∙ Φ∙ q=−ΦT ∙ M ∙ I ∙ ug
Si otterrà dunque per l'i-esimo modo di vibrare la seguente equazione:
mi¿ ∙ qi+c i
¿ ∙ qi+k i¿ ∙ qi=−ψ i
T ∙ M ∙ I ∙ ug
Si è passati dunque da un sistema da n GDL ad n sistemi ad 1 GDL.
Adimensionalizzando rispetto alla massa generalizzata otterremo:
q i+2ν i¿ωi ∙ qi+ωi
2 ∙ qi=−ψ i
T ∙ M ∙ I
mi¿ ∙ug
Il termine ψ i
T ∙M ∙ I
mi¿ rappresenta il coefficiente di partecipazione modale ci.
I modi infatti non partecipano con la stessa intensità nella combinazione che determina ladeformazione effettiva e le relative spinte. I modi di vibrare a più basa pulsazione (periodo piùalto) ha un peso maggiore delle altre vibrazioni e vengono detti fondamentali. In definitiva coefficiente di partecipazione modale c i tiene conto dell’influenza del modo i-esimo, di pulsazione w i , alla determinazione effettiva dello spostamento e alla spinta sismica in una determinata direzione R .La deformazione effettiva infatti sarà combinazione lineare delle deformazioni ottenute dai vari modi di vibrare ed il peso sarà rappresentato proprio dai coefficienti di partecipazione c i.
Il fattore di partecipazione è espresso dalla relazione:

c i=ψ i
T ∙ M ∙R
mi¿
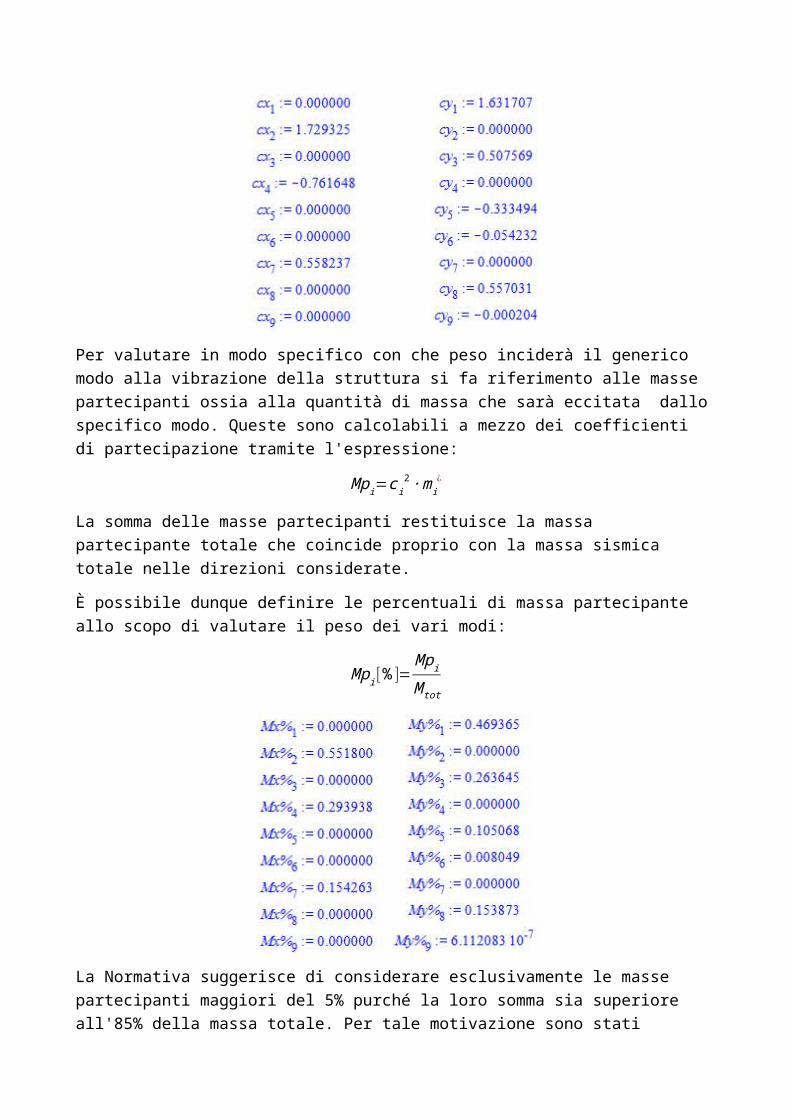
Dove con R è indicato il vettore direzione. Sono state dunque definite le due direzioni principali a mezzo di Rx = {1,1,1,0,0,0,0,0,0} e Ry = {0,0,0,1,1,1,0,0,0} individuando dunque i coefficienti di partecipazione che concorrono in tali direzioni:
Per valutare in modo specifico con che peso inciderà il generico modo alla vibrazione della struttura si fa riferimento alle masse partecipanti ossia alla quantità di massa che sarà eccitata dallo specifico modo. Queste sono calcolabili a mezzo dei coefficienti di partecipazione tramite l'espressione:
Mpi=c i2 ∙mi
¿
La somma delle masse partecipanti restituisce la massa partecipante totale che coincide proprio con la massa sismica totale nelle direzioni considerate.
È possibile dunque definire le percentuali di massa partecipante allo scopo di valutare il peso dei vari modi:
Mpi[%]=Mpi
M tot
La Normativa suggerisce di considerare esclusivamente le masse partecipanti maggiori del 5% purché la loro somma sia superiore all'85% della massa totale. Per tale motivazione sono stati
considerati i modi 2, 4 e 7 per l'azione sismica lungo la direzione X e i modi 1,3,5 e 8 per il sisma lungo Y.
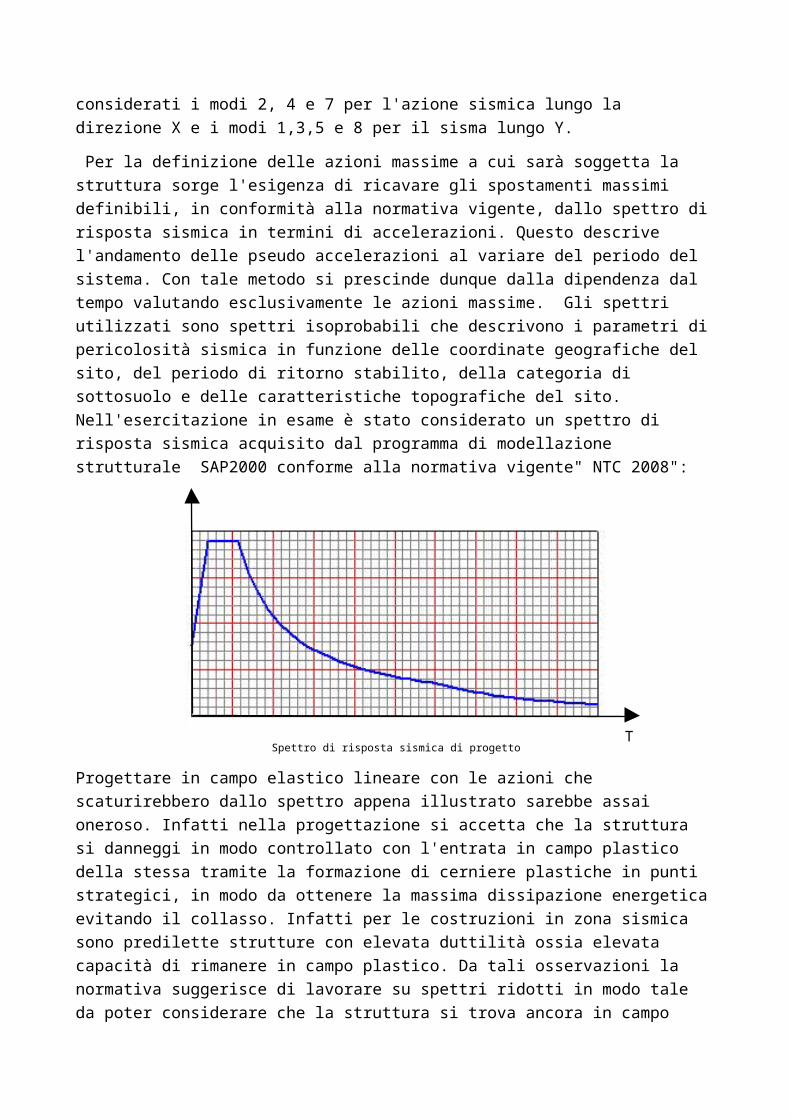
Per la definizione delle azioni massime a cui sarà soggetta la struttura sorge l'esigenza di ricavare gli spostamenti massimi definibili, in conformità alla normativa vigente, dallo spettro di risposta sismica in termini di accelerazioni. Questo descrive l'andamento delle pseudo accelerazioni al variare del periodo del sistema. Con tale metodo si prescinde dunque dalla dipendenza dal tempo valutando esclusivamente le azioni massime. Gli spettri utilizzati sono spettri isoprobabili che descrivono i parametri di pericolosità sismica in funzione delle coordinate geografiche del sito, del periodo di ritorno stabilito, della categoria di sottosuolo e delle caratteristiche topografiche del sito. Nell'esercitazione in esame è stato considerato un spettro di risposta sismica acquisito dal programma di modellazione strutturale SAP2000 conforme alla normativa vigente" NTC 2008":
Spettro di risposta sismica di progetto
Progettare in campo elastico lineare con le azioni che scaturirebbero dallo spettro appena illustrato sarebbe assai oneroso. Infatti nella progettazione si accetta che la struttura si danneggi in modo controllato con l'entrata in campo plastico della stessa tramite la formazione di cerniere plastiche in punti strategici, in modo da ottenere la massima dissipazione energetica evitando il collasso. Infatti per le costruzioni in zona sismica sono predilette strutture con elevata duttilità ossia elevata capacità di rimanere in campo plastico. Da tali osservazioni la normativa suggerisce di lavorare su spettri ridotti in modo tale da poter considerare che la struttura si trova ancora in campo elastico-lineare, dovendo però garantire la duttilità necessaria al superamento dell'evento di progetto.
Lo spettro sarà ridotto tramite il coefficiente di struttura q valutato in funzione delle direttive dettate dalle NTC 2008.
q=K ∙ q0
Dove:
q0 = valore massimo del fattore di struttura funzione del grado di iperstaticità e della duttilità attesa della stessa
K R = fattore riduttivo che tiene conto della regolarità in altezza della struttura (0,8 - 1)
Di seguito sono riportate le tabelle adottate per la valutazione del coefficiente di struttura.
Sa
T
È stato inoltre definito un fattore riduttivo K R =0,8 in quanto la struttura considerata non si presenta regolare in altezza. Il coefficiente di struttura sarà dunque:
q=K R ∙q0=0,8 ∙ 4,5 ∙ 1,3=4,7
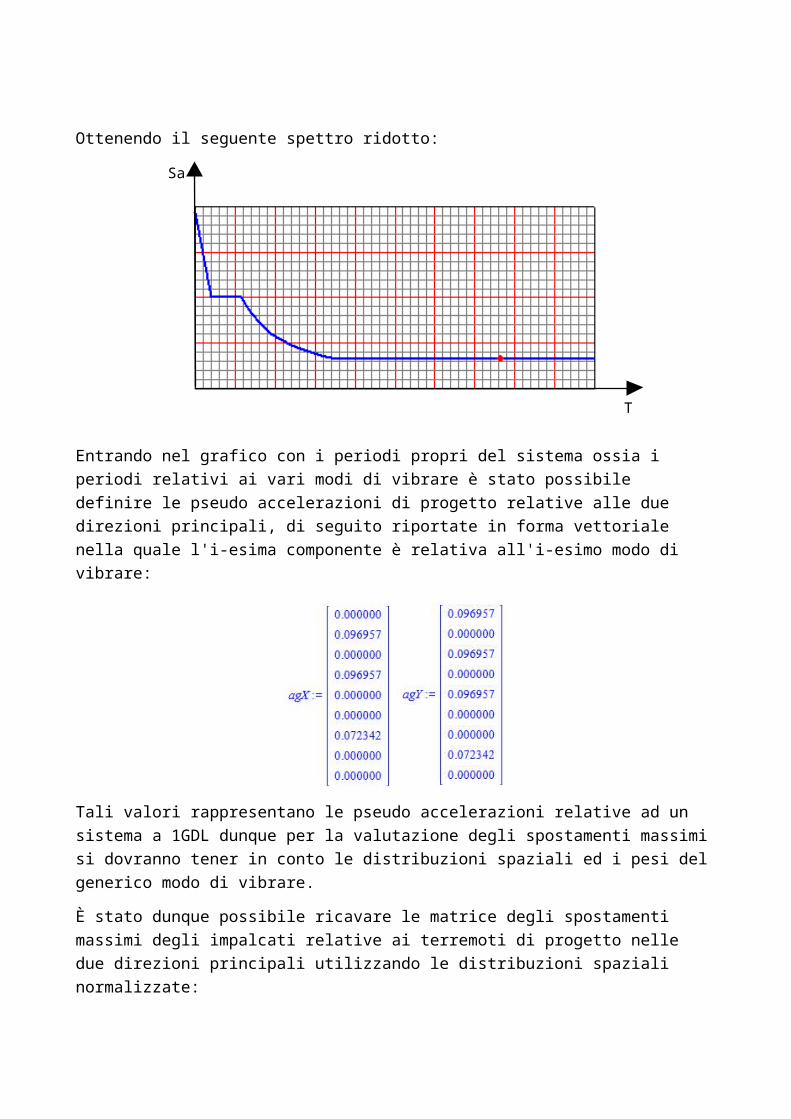
Ottenendo il seguente spettro ridotto:
Entrando nel grafico con i periodi propri del sistema ossia i periodi relativi ai vari modi di vibrare è stato possibile definire le pseudo accelerazioni di progetto relative alle due direzioni principali, di seguito riportate in forma vettoriale nella quale l'i-esima componente è relativa all'i-esimo modo di vibrare:
T
Sa
Tali valori rappresentano le pseudo accelerazioni relative ad un sistema a 1GDL dunque per la valutazione degli spostamenti massimi si dovranno tener in conto le distribuzioni spaziali ed i pesi del generico modo di vibrare.
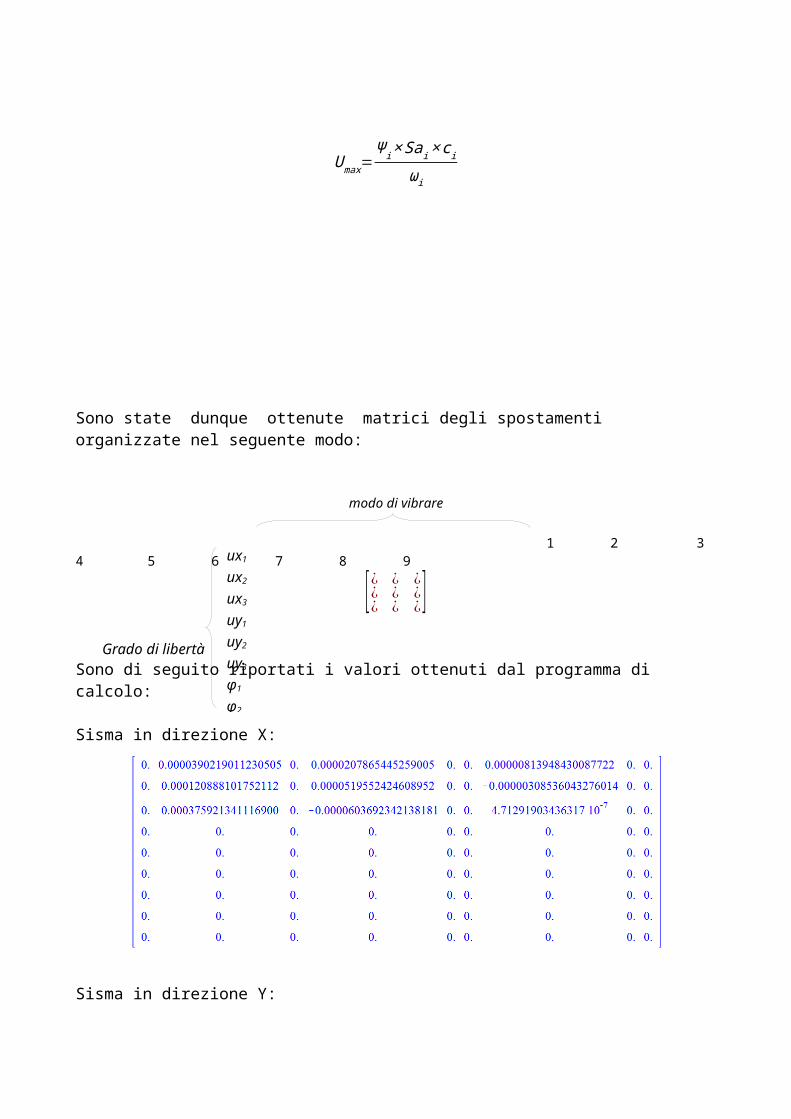
È stato dunque possibile ricavare le matrice degli spostamenti massimi degli impalcati relative ai terremoti di progetto nelle due direzioni principali utilizzando le distribuzioni spaziali normalizzate:
Umax=Ψ i× Sa i× ci
ωi
Sono state dunque ottenute matrici degli spostamenti organizzate nel seguente modo:
modo di vibrare
1 2 3 4 5 6 7 8 9
[¿ ¿ ¿¿ ¿ ¿¿ ¿ ¿]
Sono di seguito riportati i valori ottenuti dal programma di calcolo:
Sisma in direzione X:
ux1
ux2
ux3
uy1
uy2
uy3
φ1
φ2
φ3
Grado di libertà
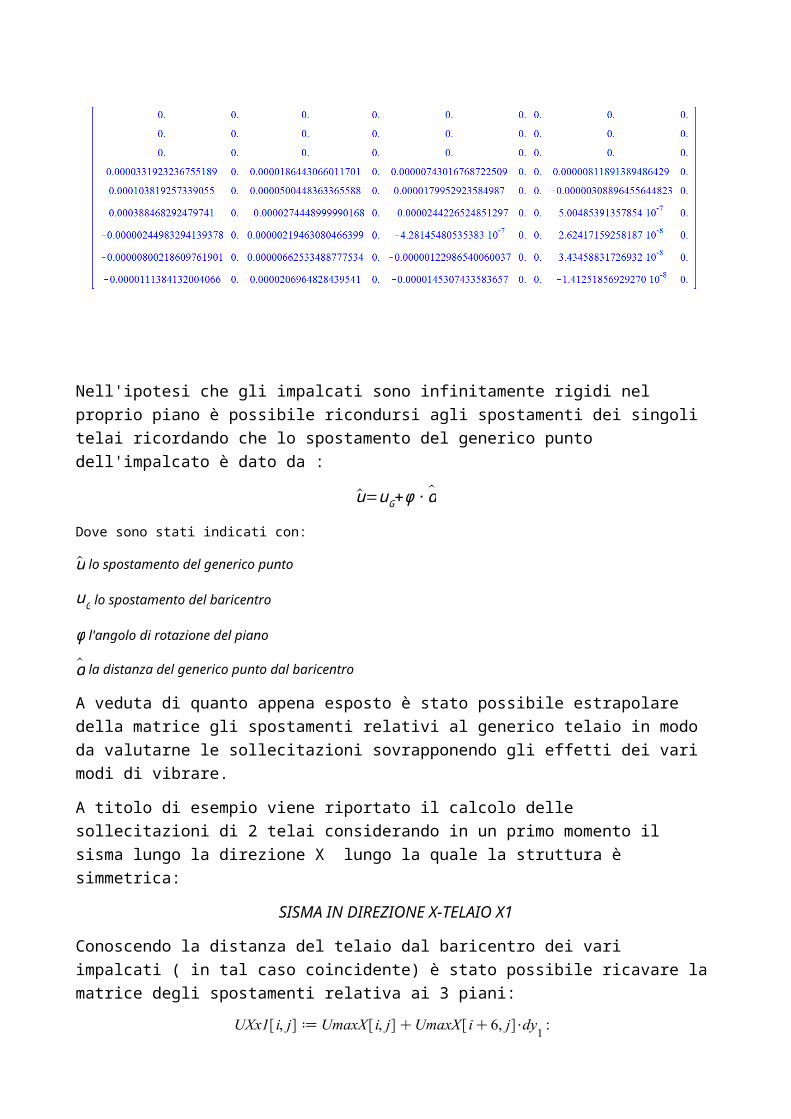
Sisma in direzione Y:
Nell'ipotesi che gli impalcati sono infinitamente rigidi nel proprio piano è possibile ricondursi agli spostamenti dei singoli telai ricordando che lo spostamento del generico punto dell'impalcato è dato da :
u=uG+φ ∙ d
Dove sono stati indicati con:
u lo spostamento del generico punto
uG lo spostamento del baricentro
φ l'angolo di rotazione del piano
d la distanza del generico punto dal baricentro
A veduta di quanto appena esposto è stato possibile estrapolare della matrice gli spostamenti relativi al generico telaio in modo da valutarne le sollecitazioni sovrapponendo gli effetti dei vari modi di vibrare.
A titolo di esempio viene riportato il calcolo delle sollecitazioni di 2 telai considerando in un primo momento il sisma lungo la direzione X lungo la quale la struttura è simmetrica:
SISMA IN DIREZIONE X-TELAIO X1
Conoscendo la distanza del telaio dal baricentro dei vari impalcati ( in tal caso coincidente) è stato possibile ricavare la matrice degli spostamenti relativa ai 3 piani:
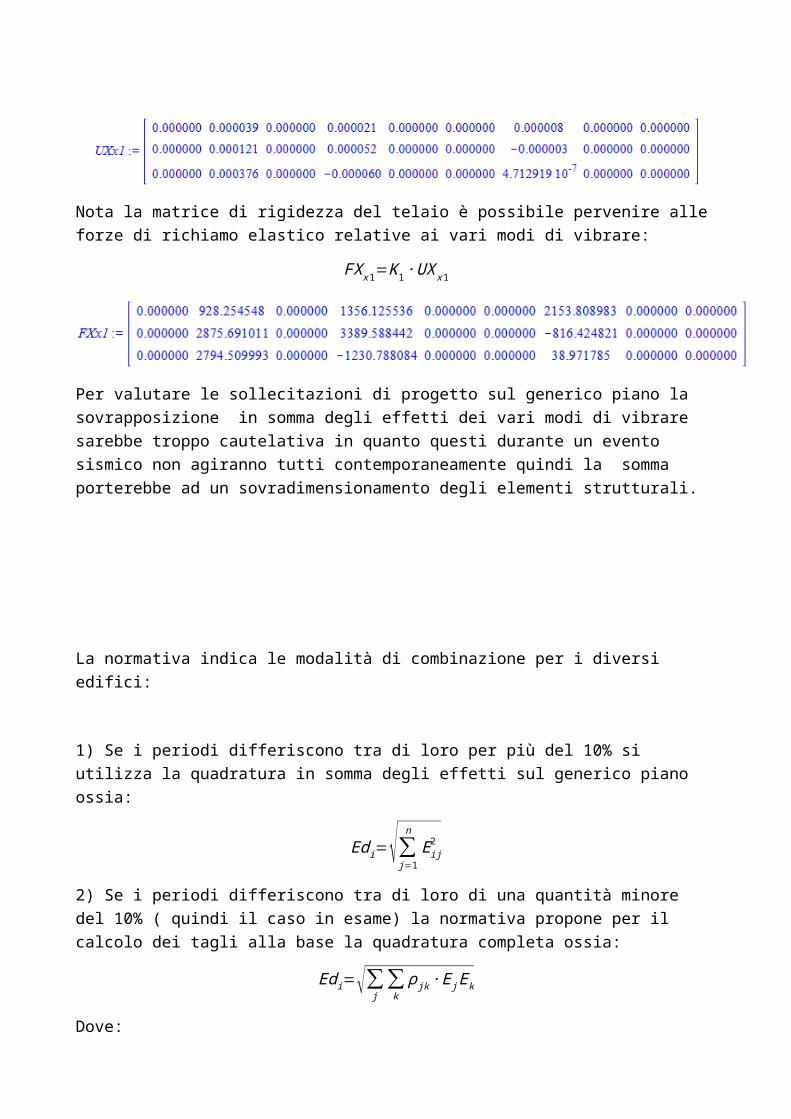
Nota la matrice di rigidezza del telaio è possibile pervenire alle forze di richiamo elastico relative ai vari modi di vibrare:
FX x 1=K1 ∙UX x 1
Per valutare le sollecitazioni di progetto sul generico piano la sovrapposizione in somma degli effetti dei vari modi di vibrare sarebbe troppo cautelativa in quanto questi durante un evento sismico non agiranno tutti contemporaneamente quindi la somma porterebbe ad un sovradimensionamento degli elementi strutturali.
La normativa indica le modalità di combinazione per i diversi edifici:
1) Se i periodi differiscono tra di loro per più del 10% si utilizza la quadratura in somma degli effetti sul generico piano ossia:
Ed i=√∑j=1
n
Eij2
2) Se i periodi differiscono tra di loro di una quantità minore del 10% ( quindi il caso in esame) la normativa propone per il calcolo dei tagli alla base la quadratura completa ossia:
Ed i=√∑j∑
k
ρ jk ∙E j Ek
Dove:
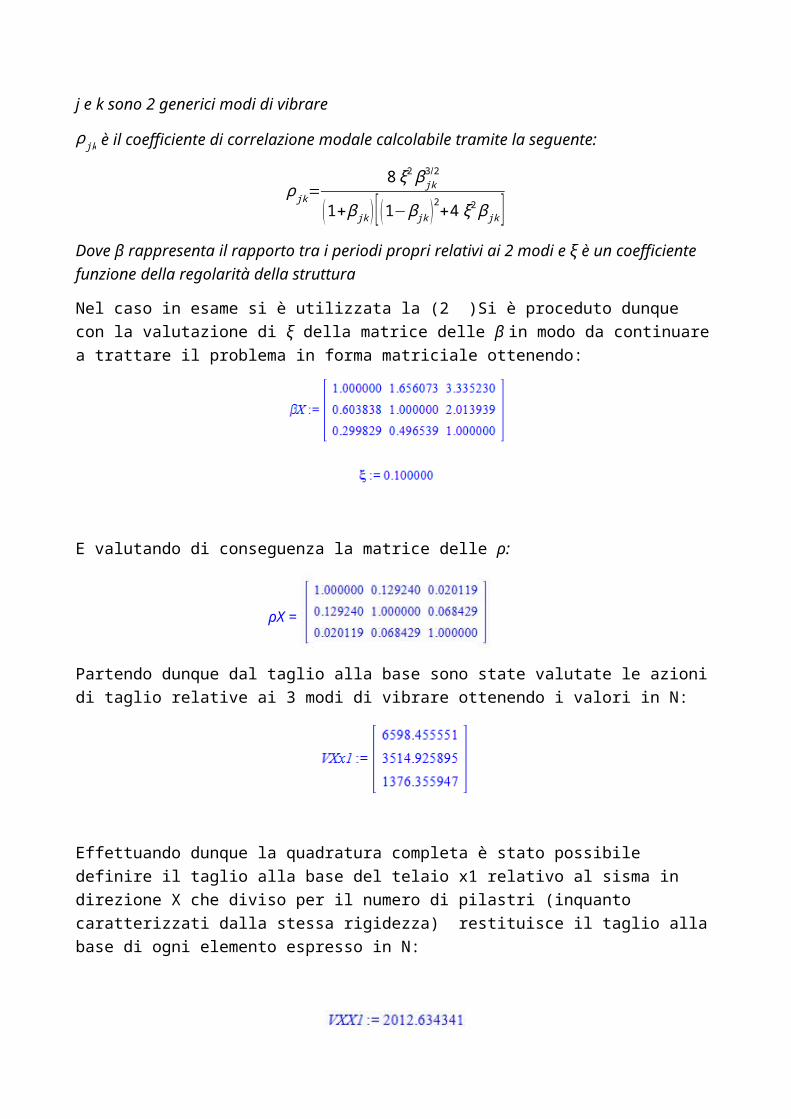
j e k sono 2 generici modi di vibrare
ρ jk è il coefficiente di correlazione modale calcolabile tramite la seguente:
ρ jk=8ξ2 β jk
3/2
(1+β jk ) [ (1−β jk )2+4ξ2 β jk ]Dove β rappresenta il rapporto tra i periodi propri relativi ai 2 modi e ξ è un coefficiente funzione della regolarità della struttura
Nel caso in esame si è utilizzata la (2 )Si è proceduto dunque con la valutazione di ξ della matrice delle β in modo da continuare a trattare il problema in forma matriciale ottenendo:
E valutando di conseguenza la matrice delle ρ:
Partendo dunque dal taglio alla base sono state valutate le azioni di taglio relative ai 3 modi di vibrare ottenendo i valori in N:
Effettuando dunque la quadratura completa è stato possibile definire il taglio alla base del telaio x1 relativo al sisma in direzione X che diviso per il numero di pilastri (inquanto caratterizzati dalla stessa rigidezza) restituisce il taglio alla base di ogni elemento espresso in N:
Di conseguenza è stato valutato il momento flettente come
M=V ∙h2[ N ∙m ]
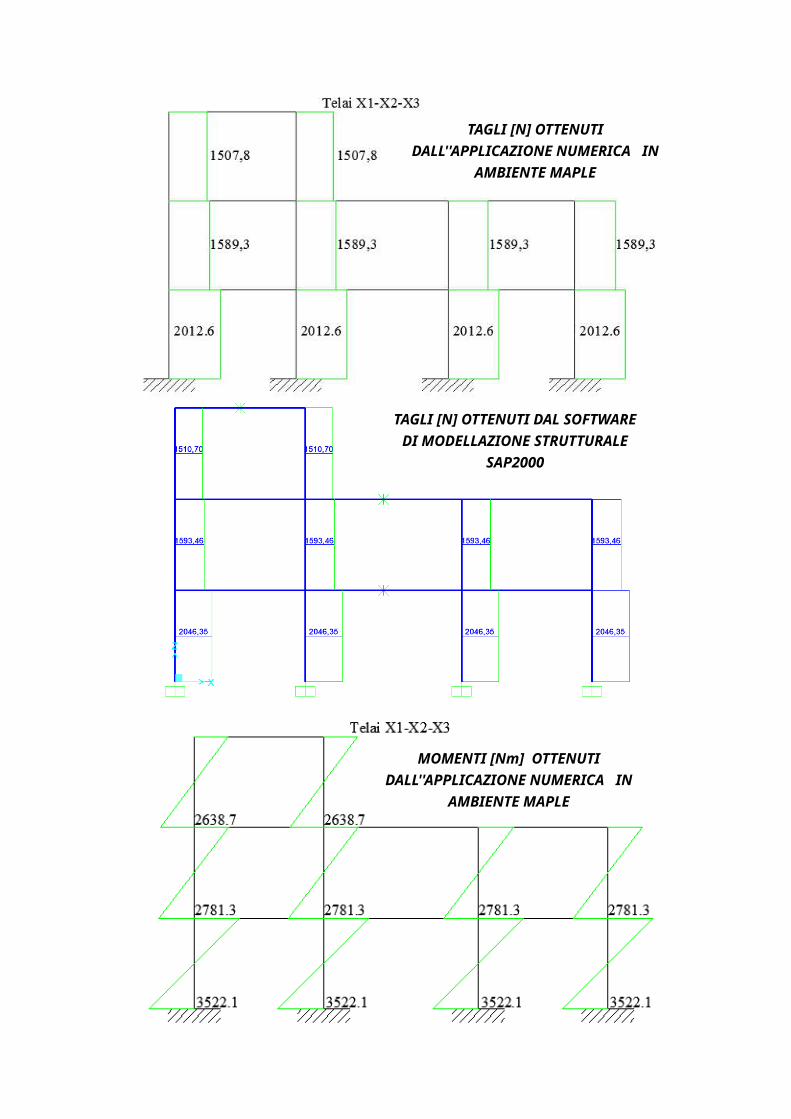
Eseguendo ciclicamente analoghi passaggi per gli altri piani sono stati ottenuti i tagli alla base di ogni pilastro. È da far notare che essendo i tre telai caratterizzati dalla stessa rigidezza ed essendo la struttura simmetrica lungo la direzione di azione del sisma i tagli relativi ai 3 telai saranno i
ρX =
medesimi. Per verificare la bontà dei calcoli vengono di seguito messi a confronto con i risultati ottenuti dal software di progettazione strutturale SAP2000:
TAGLI [N] OTTENUTI DALL''APPLICAZIONE NUMERICA
IN AMBIENTE MAPLE
TAGLI [N] OTTENUTI DAL SOFTWARE DI MODELLAZIONE STRUTTURALE
SAP2000
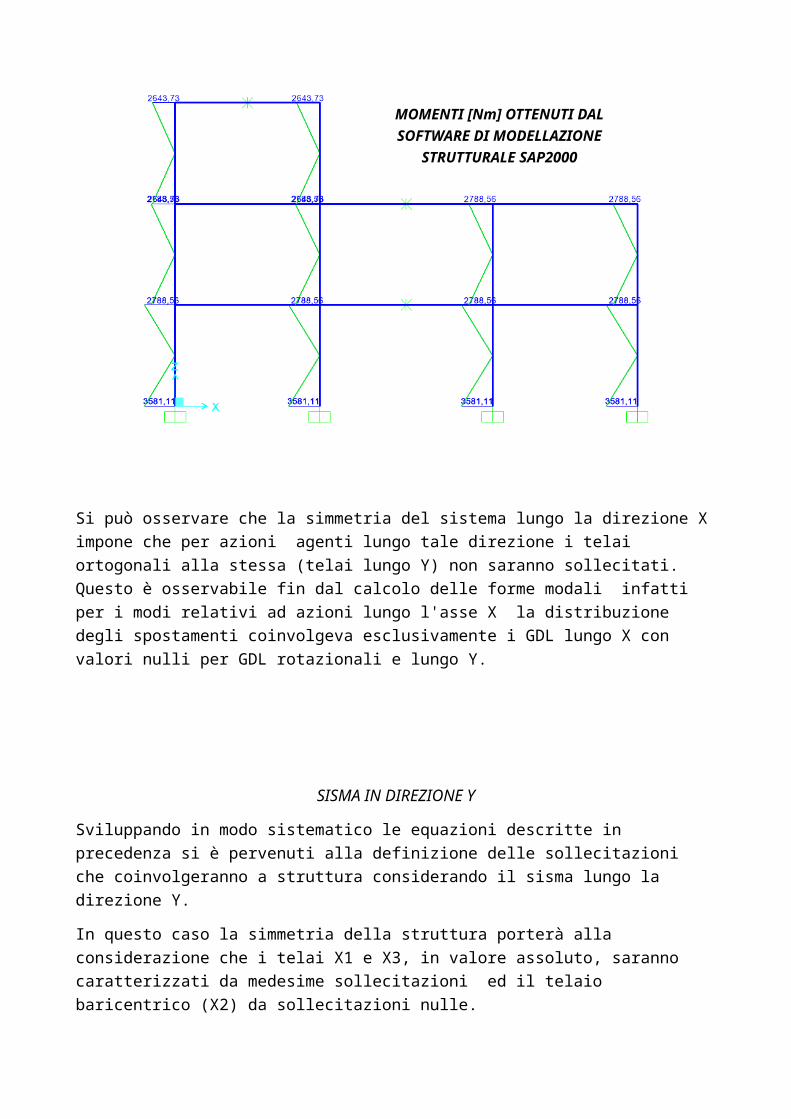
Si può osservare che la simmetria del sistema lungo la direzione X impone che per azioni agenti lungo tale direzione i telai ortogonali alla stessa (telai lungo Y) non saranno sollecitati. Questo è osservabile fin dal calcolo delle forme modali infatti per i modi relativi ad azioni lungo l'asse X la distribuzione degli spostamenti coinvolgeva esclusivamente i GDL lungo X con valori nulli per GDL rotazionali e lungo Y.
MOMENTI [Nm] OTTENUTI DALL''APPLICAZIONE NUMERICA
IN AMBIENTE MAPLE
MOMENTI [Nm] OTTENUTI DAL SOFTWARE DI MODELLAZIONE
STRUTTURALE SAP2000
SISMA IN DIREZIONE Y
Sviluppando in modo sistematico le equazioni descritte in precedenza si è pervenuti alla definizione delle sollecitazioni che coinvolgeranno a struttura considerando il sisma lungo la direzione Y.
In questo caso la simmetria della struttura porterà alla considerazione che i telai X1 e X3, in valore assoluto, saranno caratterizzati da medesime sollecitazioni ed il telaio baricentrico (X2) da sollecitazioni nulle.
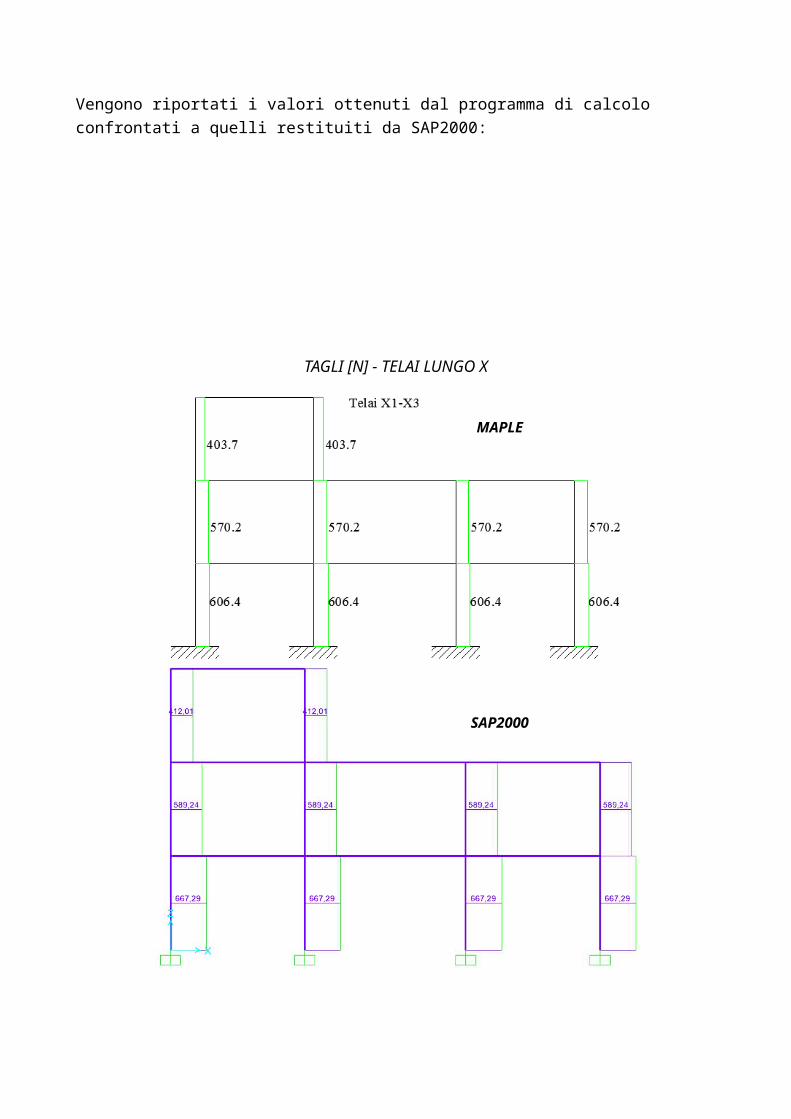
Vengono riportati i valori ottenuti dal programma di calcolo confrontati a quelli restituiti da SAP2000:
TAGLI [N] - TELAI LUNGO X
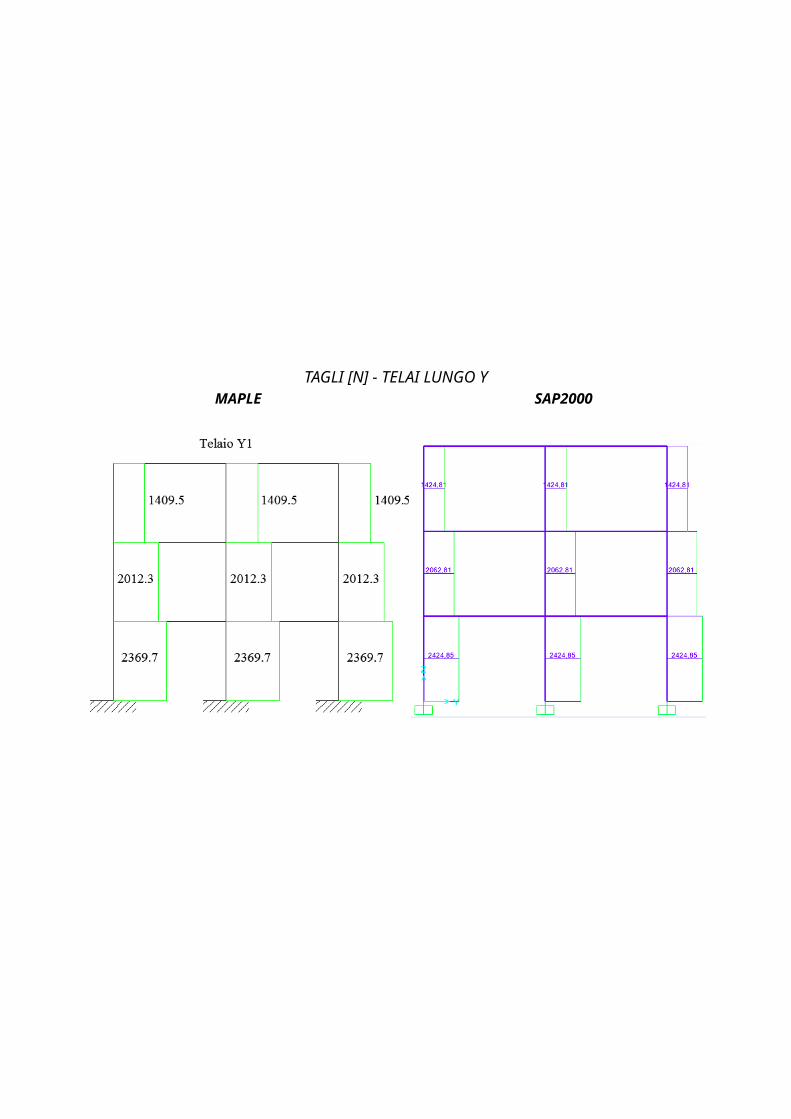
TAGLI [N] - TELAI LUNGO Y
MAPLE
SAP2000
SAP2000MAPLE
MOMENTI [Nm] - TELAI LUNGO X
Telai X1,X3
SAP2000 MAPLE
PIANO M [Nm]1 1061,22 997,93 706,5
TELAI X1,X3
MOMENTI [Nm] - TELAI LUNGO Y
Telaio Y1
Telaio Y2
SAP2000 MAPLE
PIANO M [Nm]1 4147,02 3521,53 2466,6
TELAO Y1
SAP2000 MAPLE
PIANO M [Nm]1 3567,92 2871,43 2347,8
TELAO Y2
Telaio Y3
Telaio Y4
SAP2000 MAPLE
PIANO M [Nm]1 3216,02 2357,1
TELAO Y3
SAP2000 MAPLE
PIANO M [Nm]1 3290,92 2360,2
TELAO Y4