Laboratorio Calcolo e Strutture - ingaero.uniroma1.it · • Gli autovettori ... Analisi Modale ....
47
MSC Software Università di Roma - Sapienza Laboratorio Calcolo e Strutture Esercitazione n. 3- Dinamica Laboratorio Calcolo e Strutture Esercitazione n. 3 “Analisi Modale e della Risposta al Transitorio” Ing. Mauro Linari Senior Project Manager MSC Software S.r.l.
Transcript of Laboratorio Calcolo e Strutture - ingaero.uniroma1.it · • Gli autovettori ... Analisi Modale ....
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
Laboratorio Calcolo e Strutture Esercitazione n. 3
“Analisi Modale e della Risposta al Transitorio”
Ing. Mauro Linari
Senior Pro ject Manager
MSC Software S.r. l .
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
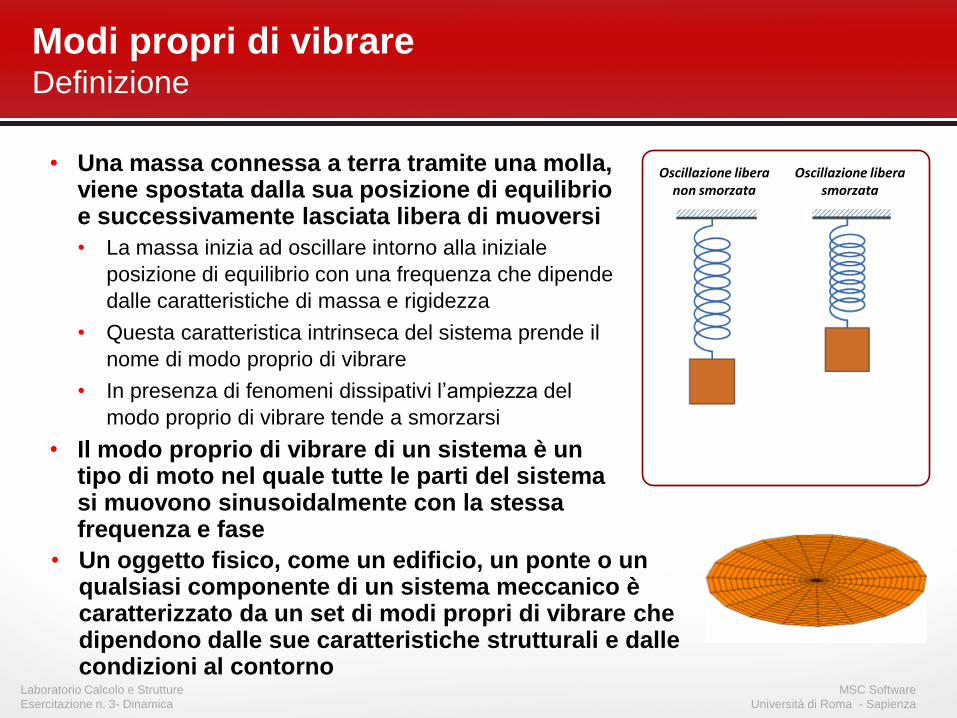
• Il modo proprio di vibrare di un sistema è un tipo di moto nel quale tutte le parti del sistema si muovono sinusoidalmente con la stessa frequenza e fase
• Una massa connessa a terra tramite una molla, viene spostata dalla sua posizione di equilibrio e successivamente lasciata libera di muoversi
• La massa inizia ad oscillare intorno alla iniziale
posizione di equilibrio con una frequenza che dipende
dalle caratteristiche di massa e rigidezza
• Questa caratteristica intrinseca del sistema prende il
nome di modo proprio di vibrare
• In presenza di fenomeni dissipativi l’ampiezza del
modo proprio di vibrare tende a smorzarsi
Oscillazione libera non smorzata
Oscillazione libera smorzata
Modi propri di vibrare Definizione
• Un oggetto fisico, come un edificio, un ponte o un qualsiasi componente di un sistema meccanico è caratterizzato da un set di modi propri di vibrare che dipendono dalle sue caratteristiche strutturali e dalle condizioni al contorno
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
• Valutare le caratteristiche dinamiche della struttura.
• Per esempio, si supponga di dover installare una macchina rotante su un’altra
struttura. Potrebbe essere necessario verificare se la frequenza della massa rotante
è prossima ad una delle frequenze naturali della struttura onde evitare eccessive
vibrazioni.
• Valutare l’amplificazione dinamica dei carichi applicati
• Utilizzare le frequenze naturali e modi normali per guidare/controllare
una successiva analisi dinamica (risposta ai transitori, analisi dello
spettro di risposta)
• Ad esempio, quale dovrebbe essere il tempo di integrazione più appropriato per le
equazioni del moto in una analisi al transitorio?
• Utilizzare le frequenze naturali ed in particolare le forme modali come
base modale per la successiva analisi dinamica
• La risposta dinamica di un sistema è data dalla somma dei contributi dei singoli modi
propri di vibrare
• Guidare l’analisi sperimentale delle strutture
• Ad esempio definire la posizione degli accelerometri
• Valutare le modifiche da apportare al progetto di una struttura
Modi propri di vibrare Perchè è utile calcolarli?
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
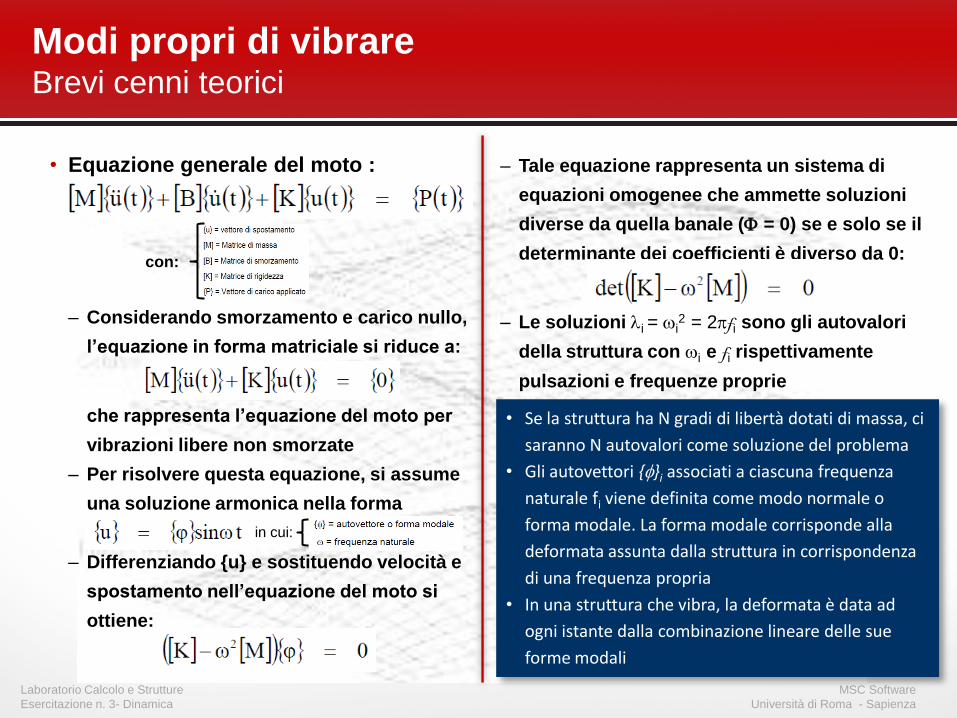
• Equazione generale del moto :
con:
‒ Considerando smorzamento e carico nullo,
l’equazione in forma matriciale si riduce a:
che rappresenta l’equazione del moto per
vibrazioni libere non smorzate
‒ Per risolvere questa equazione, si assume
una soluzione armonica nella forma
‒ Differenziando {u} e sostituendo velocità e
spostamento nell’equazione del moto si
ottiene:
in cui:
Modi propri di vibrare Brevi cenni teorici
‒ Tale equazione rappresenta un sistema di
equazioni omogenee che ammette soluzioni
diverse da quella banale ( = 0) se e solo se il
determinante dei coefficienti è diverso da 0:
‒ Le soluzioni i = i2 = 2fi sono gli autovalori
della struttura con i e fi rispettivamente
pulsazioni e frequenze proprie
• Se la struttura ha N gradi di libertà dotati di massa, ci
saranno N autovalori come soluzione del problema
• Gli autovettori {}i associati a ciascuna frequenza
naturale fi viene definita come modo normale o
forma modale. La forma modale corrisponde alla
deformata assunta dalla struttura in corrispondenza
di una frequenza propria
• In una struttura che vibra, la deformata è data ad
ogni istante dalla combinazione lineare delle sue
forme modali
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
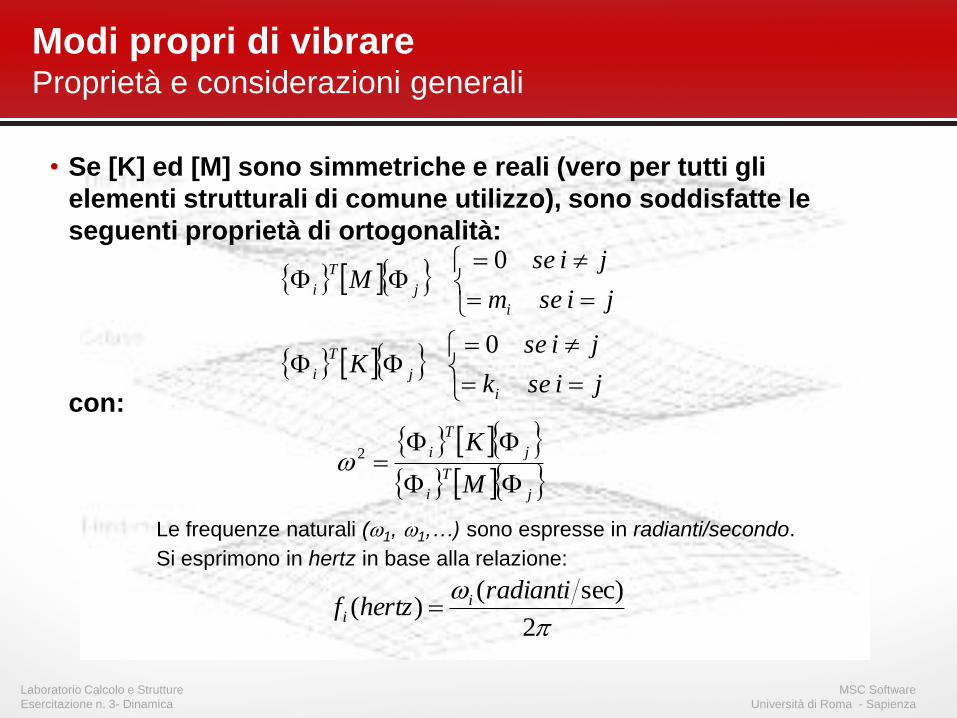
• Se [K] ed [M] sono simmetriche e reali (vero per tutti gli
elementi strutturali di comune utilizzo), sono soddisfatte le
seguenti proprietà di ortogonalità:
jisek
jiseK
jisem
jiseM
i
j
T
i
i
j
T
i
0
0
con:
j
T
i
j
T
i
M
K
2
Le frequenze naturali (1, 1,…) sono espresse in radianti/secondo.
Si esprimono in hertz in base alla relazione:
2
)sec()(
radiantihertzf i
i
Modi propri di vibrare Proprietà e considerazioni generali
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
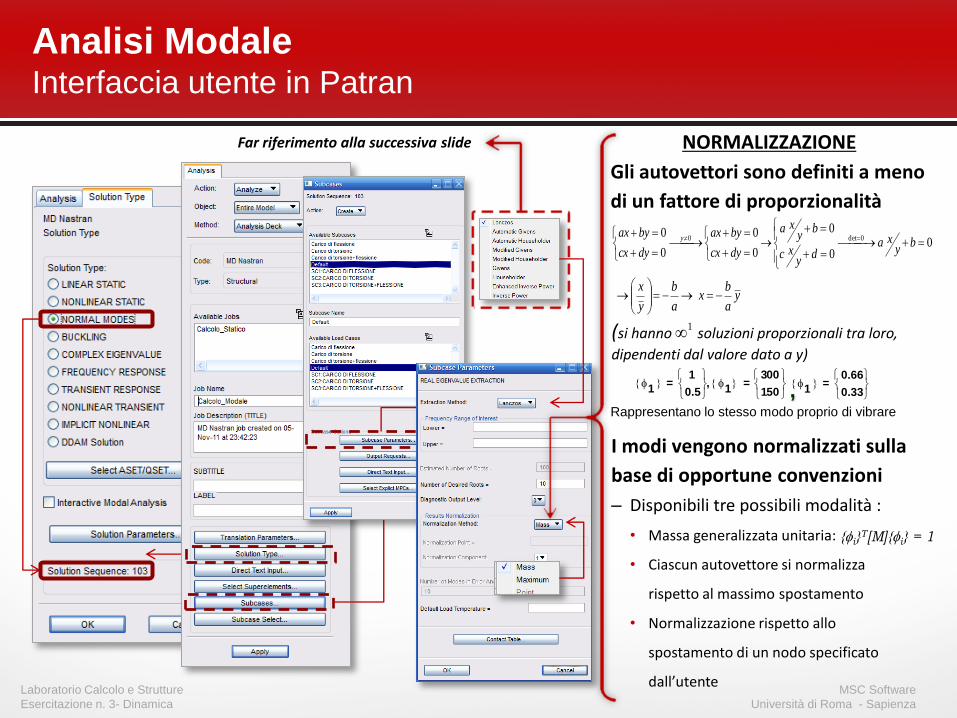
Analisi Modale Interfaccia utente in Patran
(si hanno soluzioni proporzionali tra loro,
dipendenti dal valore dato a y)
Gli autovettori sono definiti a meno
di un fattore di proporzionalità
00
0
0
0
0
00det0
b
yxa
dy
xc
by
xa
dycx
byax
dycx
byaxy
ya
bx
a
b
y
x
1
1
1
0.5
1
,300
150
= = 1
0.66
0.33
=,
Rappresentano lo stesso modo proprio di vibrare
NORMALIZZAZIONE
I modi vengono normalizzati sulla
base di opportune convenzioni
‒ Disponibili tre possibili modalità :
• Massa generalizzata unitaria:
• Ciascun autovettore si normalizza
rispetto al massimo spostamento
• Normalizzazione rispetto allo
spostamento di un nodo specificato
dall’utente
{i}T[M]{i} = 1
Far riferimento alla successiva slide
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
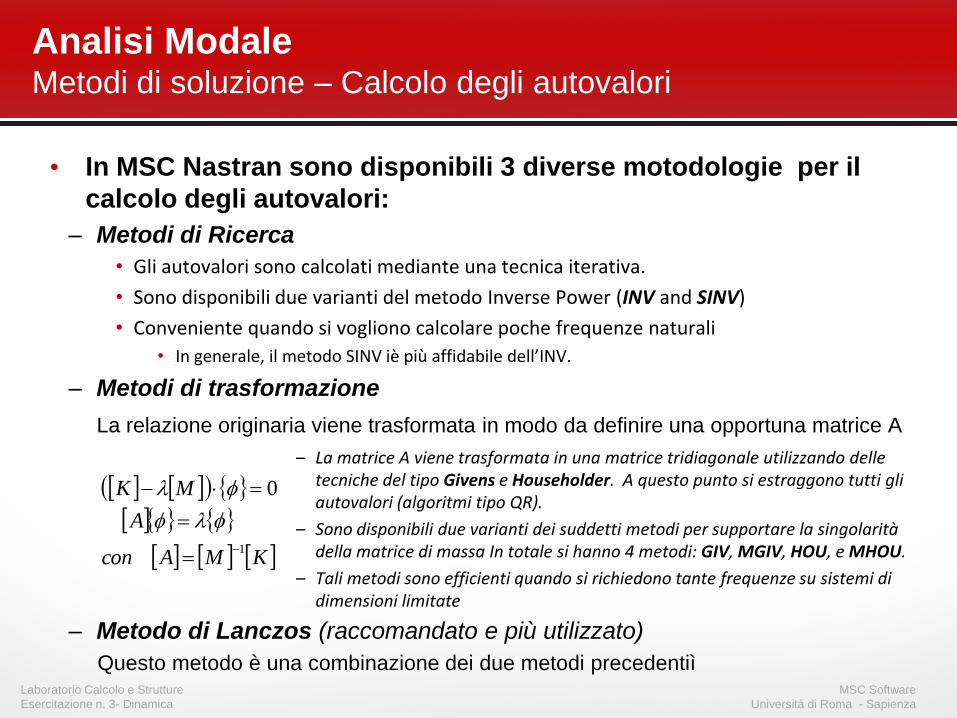
• In MSC Nastran sono disponibili 3 diverse motodologie per il
calcolo degli autovalori:
– Metodi di Ricerca
• Gli autovalori sono calcolati mediante una tecnica iterativa.
• Sono disponibili due varianti del metodo Inverse Power (INV and SINV)
• Conveniente quando si vogliono calcolare poche frequenze naturali
• In generale, il metodo SINV iè più affidabile dell’INV.
– Metodi di trasformazione
La relazione originaria viene trasformata in modo da definire una opportuna matrice A
– Metodo di Lanczos (raccomandato e più utilizzato)
Questo metodo è una combinazione dei due metodi precedentiì
Analisi Modale Metodi di soluzione – Calcolo degli autovalori
– La matrice A viene trasformata in una matrice tridiagonale utilizzando delle tecniche del tipo Givens e Householder. A questo punto si estraggono tutti gli autovalori (algoritmi tipo QR).
– Sono disponibili due varianti dei suddetti metodi per supportare la singolarità della matrice di massa In totale si hanno 4 metodi: GIV, MGIV, HOU, e MHOU.
– Tali metodi sono efficienti quando si richiedono tante frequenze su sistemi di dimensioni limitate
KMAcon
A
MK
1
0
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
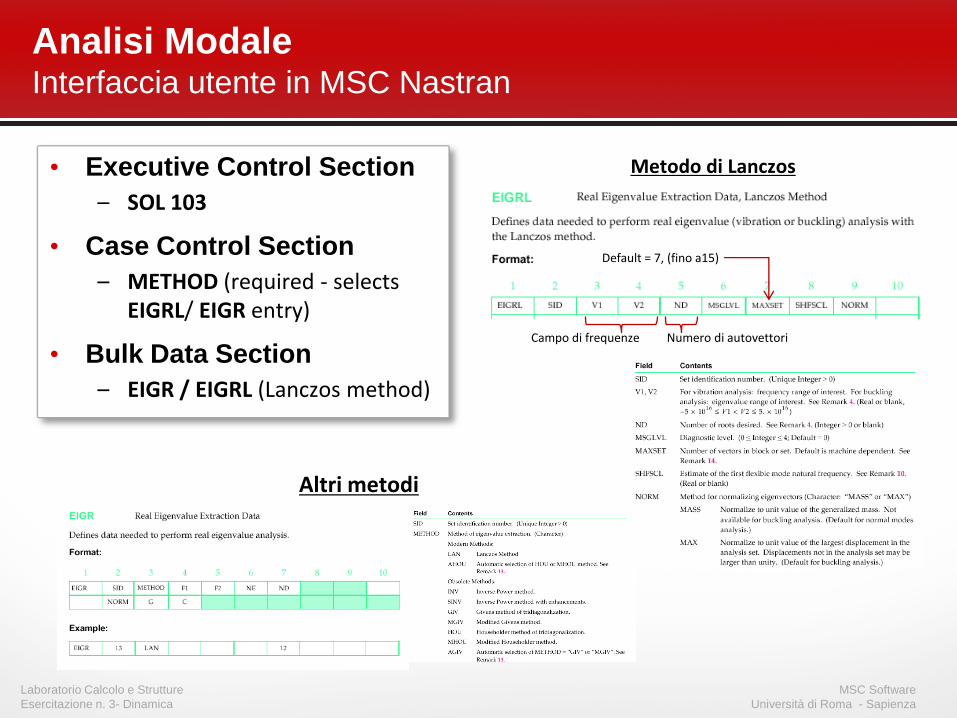
Analisi Modale Interfaccia utente in MSC Nastran
• Executive Control Section
– SOL 103
• Case Control Section
– METHOD (required - selects EIGRL/ EIGR entry)
• Bulk Data Section
– EIGR / EIGRL (Lanczos method)
Metodo di Lanczos
Altri metodi
Default = 7, (fino a15)
Campo di frequenze Numero di autovettori
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
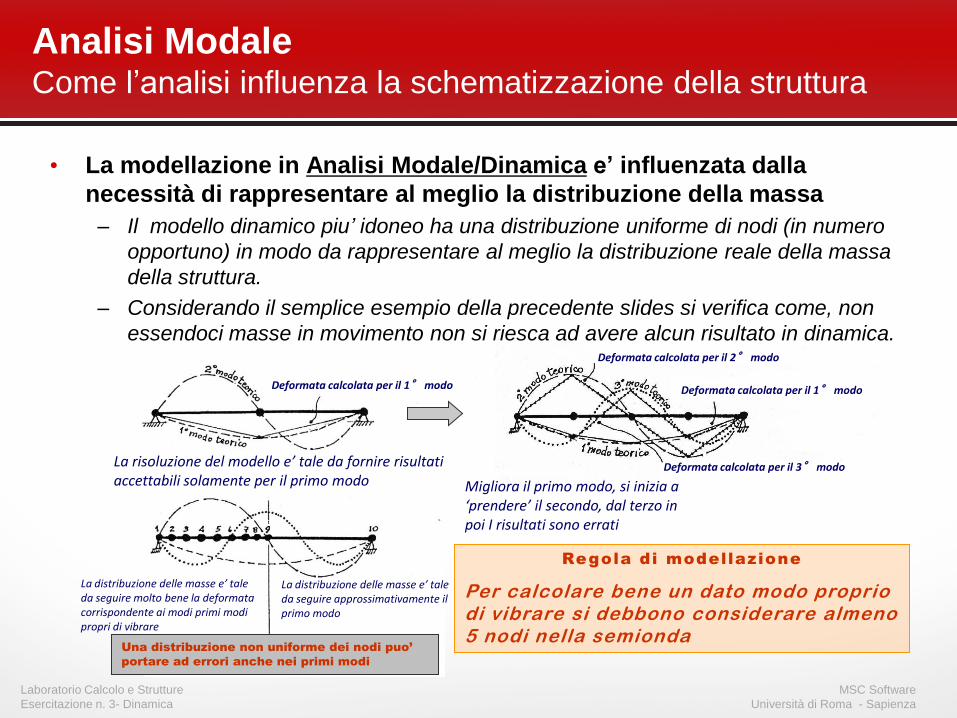
Deformata calcolata per il 1° modo
Deformata calcolata per il 2° modo
Deformata calcolata per il 1° modo
Deformata calcolata per il 3° modo La risoluzione del modello e’ tale da fornire risultati accettabili solamente per il primo modo Migliora il primo modo, si inizia a
‘prendere’ il secondo, dal terzo in poi I risultati sono errati
Regola di modellazione
Per calcolare bene un dato modo proprio di vibrare si debbono considerare almeno 5 nodi nella semionda
La distribuzione delle masse e’ tale da seguire molto bene la deformata corrispondente ai modi primi modi propri di vibrare
La distribuzione delle masse e’ tale da seguire approssimativamente il primo modo
Una distribuzione non uniforme dei nodi puo’
portare ad errori anche nei primi modi
• La modellazione in Analisi Modale/Dinamica e’ influenzata dalla
necessità di rappresentare al meglio la distribuzione della massa
– Il modello dinamico piu’ idoneo ha una distribuzione uniforme di nodi (in numero
opportuno) in modo da rappresentare al meglio la distribuzione reale della massa
della struttura.
– Considerando il semplice esempio della precedente slides si verifica come, non
essendoci masse in movimento non si riesca ad avere alcun risultato in dinamica.
Analisi Modale Come l’analisi influenza la schematizzazione della struttura
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
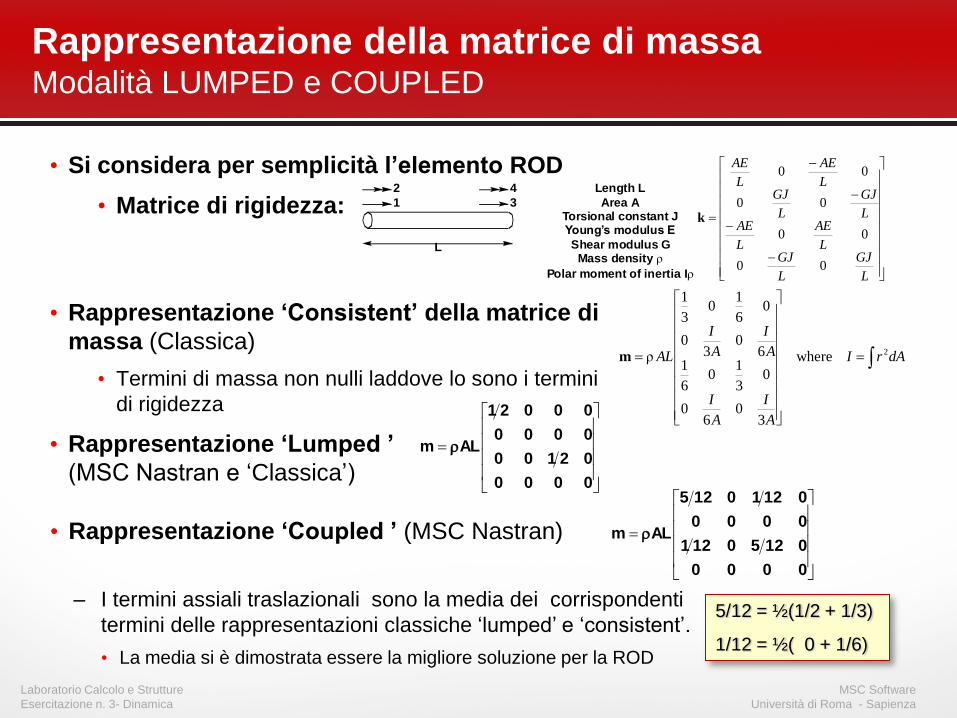
• Si considera per semplicità l’elemento ROD
• Matrice di rigidezza:
L
1
2
3
4 Length L
Area ATorsional constant JYoung’s modulus E
Shear modulus GMass density
Polar moment of inertia I
L
GJ
L
GJL
AE
L
AEL
GJ
L
GJL
AE
L
AE
00
00
00
00
k
dArI
A
I
A
I
A
I
A
I
AL 2where
30
60
03
10
6
16
03
0
06
10
3
1
ρm
0000
02100
0000
00021
ALm
0000
01250121
0000
01210125
ALm
5/12 = ½(1/2 + 1/3)
1/12 = ½( 0 + 1/6)
Rappresentazione della matrice di massa Modalità LUMPED e COUPLED
• Rappresentazione ‘Consistent’ della matrice di
massa (Classica)
• Termini di massa non nulli laddove lo sono i termini
di rigidezza
‒ I termini assiali traslazionali sono la media dei corrispondenti
termini delle rappresentazioni classiche ‘lumped’ e ‘consistent’.
• La media si è dimostrata essere la migliore soluzione per la ROD
• Rappresentazione ‘Lumped ’
(MSC Nastran e ‘Classica’)
• Rappresentazione ‘Coupled ’ (MSC Nastran)
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
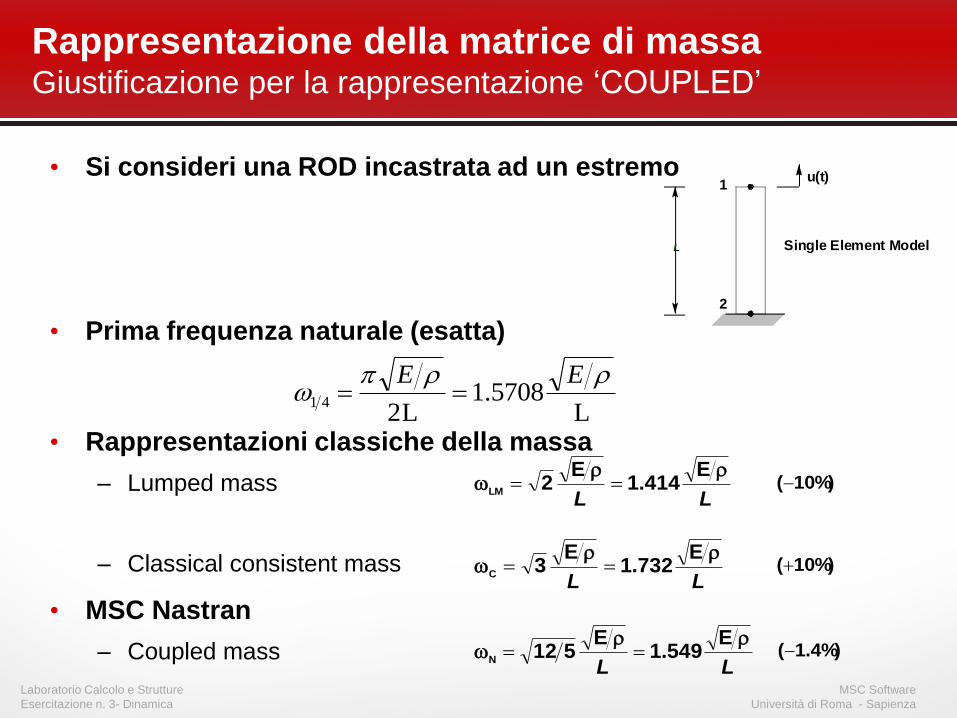
• Si consideri una ROD incastrata ad un estremo
• Prima frequenza naturale (esatta)
• Rappresentazioni classiche della massa
– Lumped mass
– Classical consistent mass
• MSC Nastran
– Coupled mass
u(t)
Single Element Model
2
1
L
L5708.1
L241
EE
LL
E414.1
E2
LM %)10(
LL
E732.1
E3
C %)10(
LL
E549.1
E512
N %)4.1(
Rappresentazione della matrice di massa Giustificazione per la rappresentazione ‘COUPLED’
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
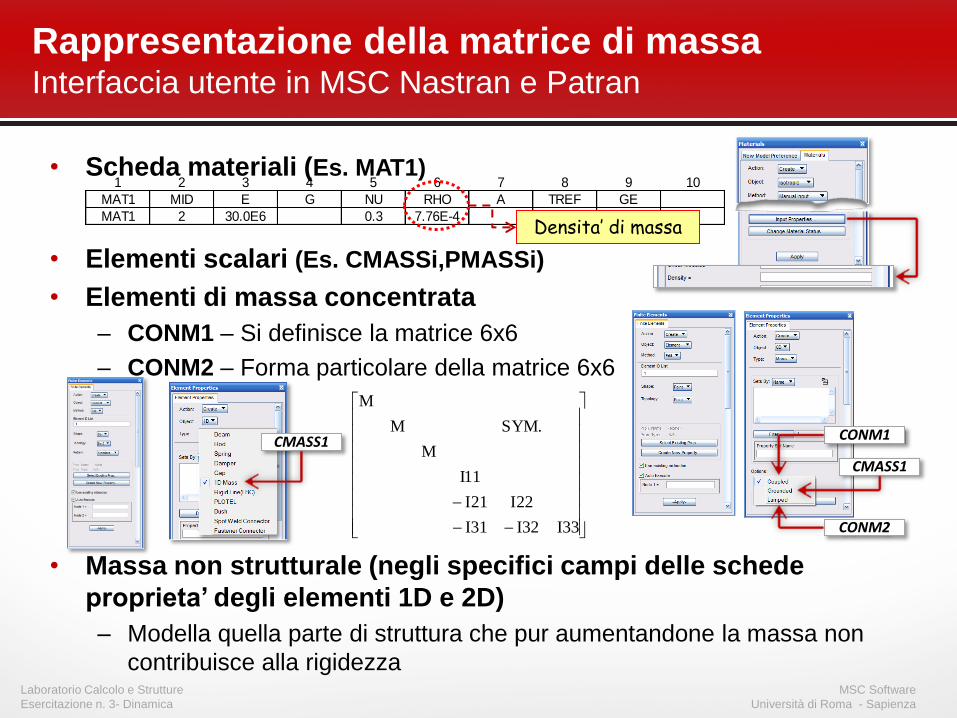
• Scheda materiali (Es. MAT1)
• Elementi scalari (Es. CMASSi,PMASSi)
• Elementi di massa concentrata
‒ CONM1 – Si definisce la matrice 6x6
‒ CONM2 – Forma particolare della matrice 6x6
• Massa non strutturale (negli specifici campi delle schede
proprieta’ degli elementi 1D e 2D)
‒ Modella quella parte di struttura che pur aumentandone la massa non
contribuisce alla rigidezza
33I32I31I
22I21I
11I
M
.SYMM
M
1 2 3 4 5 6 7 8 9 10
MAT1 MID E G NU RHO A TREF GE
MAT1 2 30.0E6 0.3 7.76E-4Densita’ di massa
Rappresentazione della matrice di massa Interfaccia utente in MSC Nastran e Patran
CONM1
CMASS1
CONM2
CMASS1
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
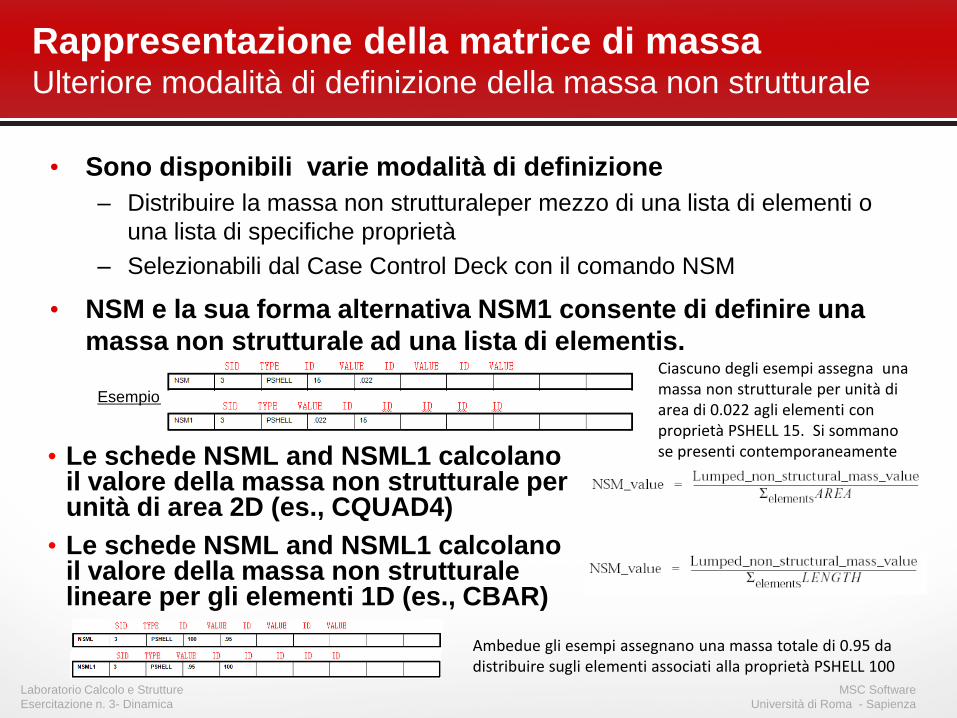
• Sono disponibili varie modalità di definizione
– Distribuire la massa non strutturaleper mezzo di una lista di elementi o
una lista di specifiche proprietà
– Selezionabili dal Case Control Deck con il comando NSM
• NSM e la sua forma alternativa NSM1 consente di definire una
massa non strutturale ad una lista di elementis.
Esempio:
Ciascuno degli esempi assegna una massa non strutturale per unità di area di 0.022 agli elementi con proprietà PSHELL 15. Si sommano se presenti contemporaneamente • Le schede NSML and NSML1 calcolano
il valore della massa non strutturale per unità di area 2D (es., CQUAD4)
• Le schede NSML and NSML1 calcolano il valore della massa non strutturale lineare per gli elementi 1D (es., CBAR)
Ambedue gli esempi assegnano una massa totale di 0.95 da distribuire sugli elementi associati alla proprietà PSHELL 100
Rappresentazione della matrice di massa Ulteriore modalità di definizione della massa non strutturale
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
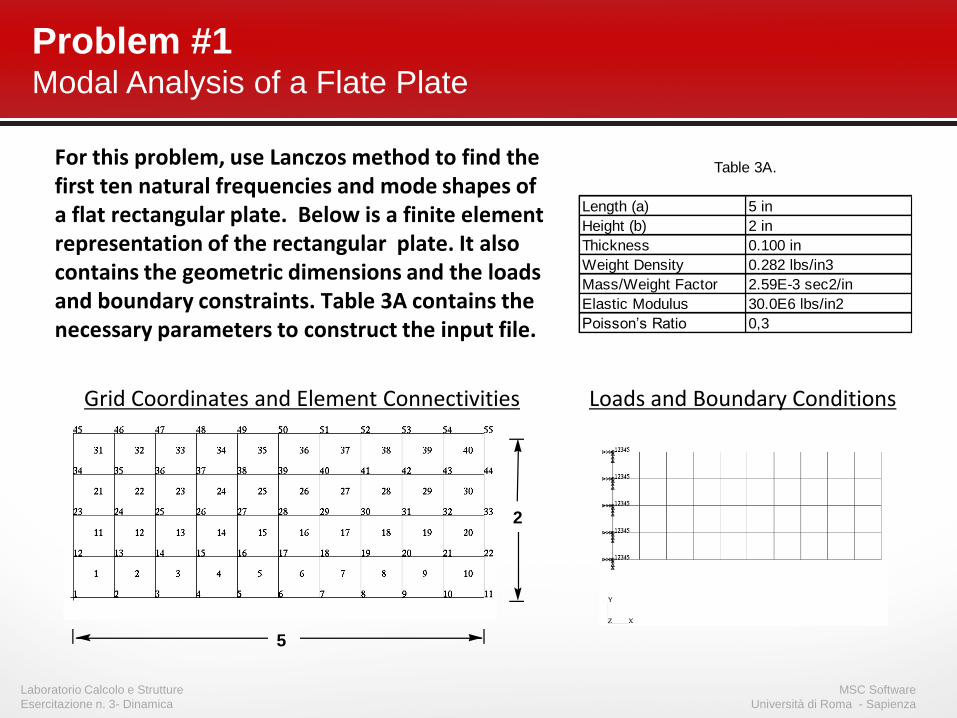
For this problem, use Lanczos method to find the first ten natural frequencies and mode shapes of a flat rectangular plate. Below is a finite element representation of the rectangular plate. It also contains the geometric dimensions and the loads and boundary constraints. Table 3A contains the necessary parameters to construct the input file.
Grid Coordinates and Element Connectivities
5
2
Problem #1 Modal Analysis of a Flate Plate
Length (a) 5 in
Height (b) 2 in
Thickness 0.100 in
Weight Density 0.282 lbs/in3
Mass/Weight Factor 2.59E-3 sec2/in
Elastic Modulus 30.0E6 lbs/in2
Poisson’s Ratio 0,3
Table 3A.
Loads and Boundary Conditions
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
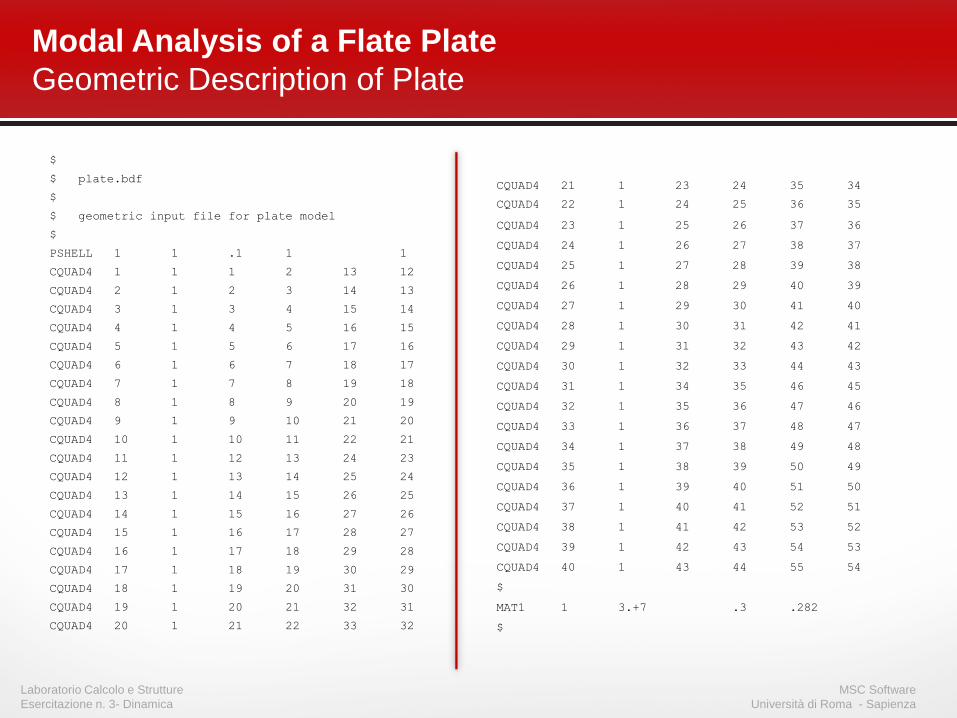
$
$ plate.bdf
$
$ geometric input file for plate model
$
PSHELL 1 1 .1 1 1
CQUAD4 1 1 1 2 13 12
CQUAD4 2 1 2 3 14 13
CQUAD4 3 1 3 4 15 14
CQUAD4 4 1 4 5 16 15
CQUAD4 5 1 5 6 17 16
CQUAD4 6 1 6 7 18 17
CQUAD4 7 1 7 8 19 18
CQUAD4 8 1 8 9 20 19
CQUAD4 9 1 9 10 21 20
CQUAD4 10 1 10 11 22 21
CQUAD4 11 1 12 13 24 23
CQUAD4 12 1 13 14 25 24
CQUAD4 13 1 14 15 26 25
CQUAD4 14 1 15 16 27 26
CQUAD4 15 1 16 17 28 27
CQUAD4 16 1 17 18 29 28
CQUAD4 17 1 18 19 30 29
CQUAD4 18 1 19 20 31 30
CQUAD4 19 1 20 21 32 31
CQUAD4 20 1 21 22 33 32
CQUAD4 21 1 23 24 35 34
CQUAD4 22 1 24 25 36 35
CQUAD4 23 1 25 26 37 36
CQUAD4 24 1 26 27 38 37
CQUAD4 25 1 27 28 39 38
CQUAD4 26 1 28 29 40 39
CQUAD4 27 1 29 30 41 40
CQUAD4 28 1 30 31 42 41
CQUAD4 29 1 31 32 43 42
CQUAD4 30 1 32 33 44 43
CQUAD4 31 1 34 35 46 45
CQUAD4 32 1 35 36 47 46
CQUAD4 33 1 36 37 48 47
CQUAD4 34 1 37 38 49 48
CQUAD4 35 1 38 39 50 49
CQUAD4 36 1 39 40 51 50
CQUAD4 37 1 40 41 52 51
CQUAD4 38 1 41 42 53 52
CQUAD4 39 1 42 43 54 53
CQUAD4 40 1 43 44 55 54
$
MAT1 1 3.+7 .3 .282
$
Modal Analysis of a Flate Plate
Geometric Description of Plate
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
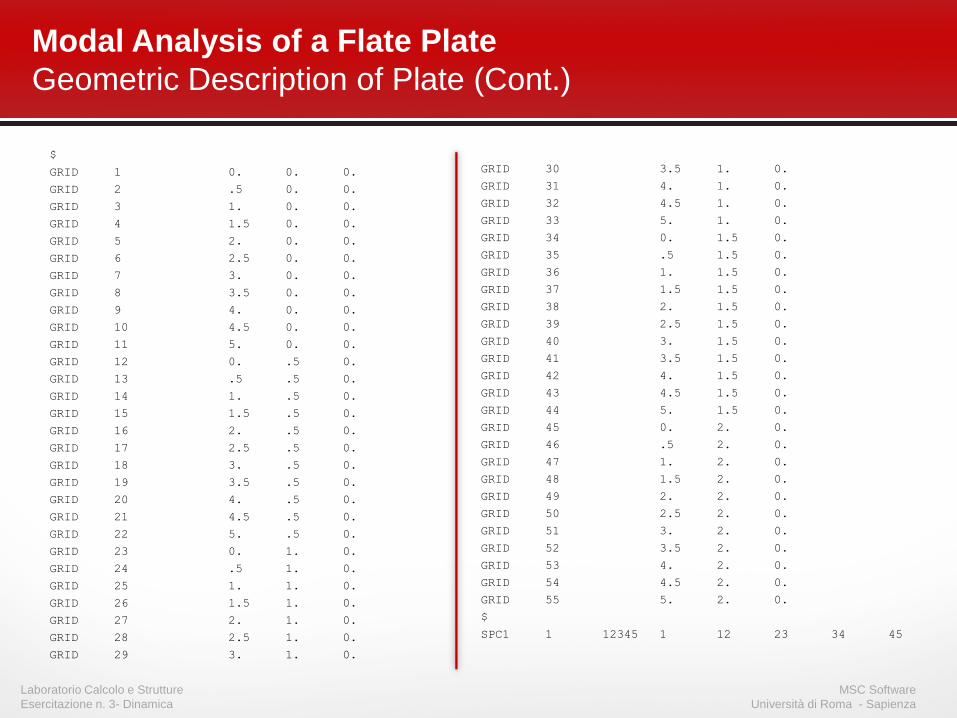
$
GRID 1 0. 0. 0.
GRID 2 .5 0. 0.
GRID 3 1. 0. 0.
GRID 4 1.5 0. 0.
GRID 5 2. 0. 0.
GRID 6 2.5 0. 0.
GRID 7 3. 0. 0.
GRID 8 3.5 0. 0.
GRID 9 4. 0. 0.
GRID 10 4.5 0. 0.
GRID 11 5. 0. 0.
GRID 12 0. .5 0.
GRID 13 .5 .5 0.
GRID 14 1. .5 0.
GRID 15 1.5 .5 0.
GRID 16 2. .5 0.
GRID 17 2.5 .5 0.
GRID 18 3. .5 0.
GRID 19 3.5 .5 0.
GRID 20 4. .5 0.
GRID 21 4.5 .5 0.
GRID 22 5. .5 0.
GRID 23 0. 1. 0.
GRID 24 .5 1. 0.
GRID 25 1. 1. 0.
GRID 26 1.5 1. 0.
GRID 27 2. 1. 0.
GRID 28 2.5 1. 0.
GRID 29 3. 1. 0.
GRID 30 3.5 1. 0.
GRID 31 4. 1. 0.
GRID 32 4.5 1. 0.
GRID 33 5. 1. 0.
GRID 34 0. 1.5 0.
GRID 35 .5 1.5 0.
GRID 36 1. 1.5 0.
GRID 37 1.5 1.5 0.
GRID 38 2. 1.5 0.
GRID 39 2.5 1.5 0.
GRID 40 3. 1.5 0.
GRID 41 3.5 1.5 0.
GRID 42 4. 1.5 0.
GRID 43 4.5 1.5 0.
GRID 44 5. 1.5 0.
GRID 45 0. 2. 0.
GRID 46 .5 2. 0.
GRID 47 1. 2. 0.
GRID 48 1.5 2. 0.
GRID 49 2. 2. 0.
GRID 50 2.5 2. 0.
GRID 51 3. 2. 0.
GRID 52 3.5 2. 0.
GRID 53 4. 2. 0.
GRID 54 4.5 2. 0.
GRID 55 5. 2. 0.
$
SPC1 1 12345 1 12 23 34 45
Modal Analysis of a Flate Plate
Geometric Description of Plate (Cont.)
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
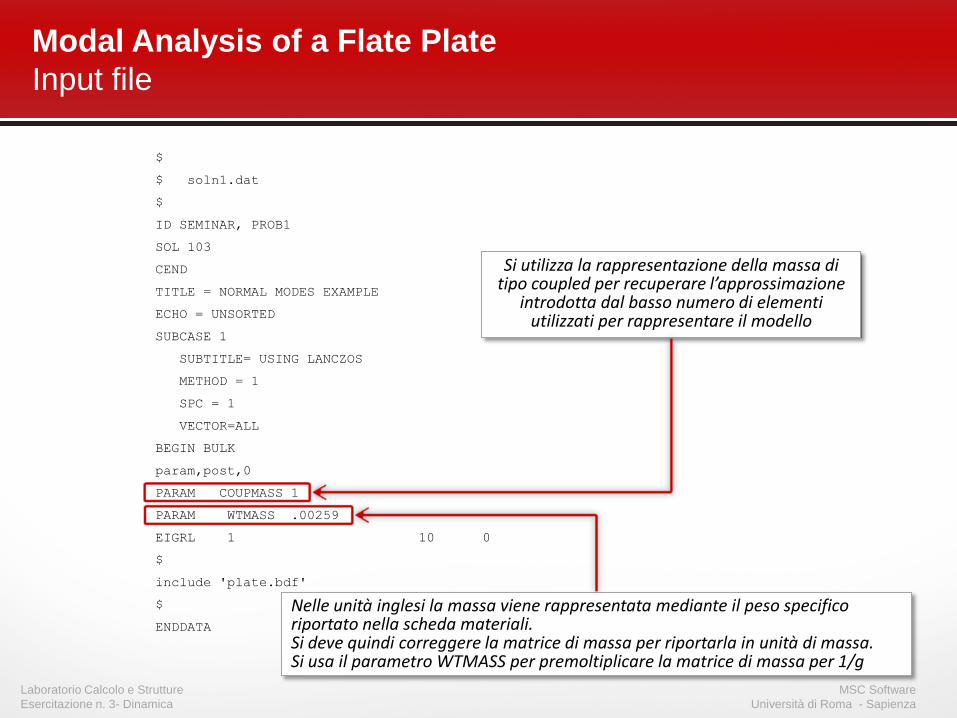
$
$ soln1.dat
$
ID SEMINAR, PROB1
SOL 103
CEND
TITLE = NORMAL MODES EXAMPLE
ECHO = UNSORTED
SUBCASE 1
SUBTITLE= USING LANCZOS
METHOD = 1
SPC = 1
VECTOR=ALL
BEGIN BULK
param,post,0
PARAM COUPMASS 1
PARAM WTMASS .00259
EIGRL 1 10 0
$
include 'plate.bdf'
$
ENDDATA
Si utilizza la rappresentazione della massa di tipo coupled per recuperare l’approssimazione
introdotta dal basso numero di elementi utilizzati per rappresentare il modello
Nelle unità inglesi la massa viene rappresentata mediante il peso specifico riportato nella scheda materiali. Si deve quindi correggere la matrice di massa per riportarla in unità di massa. Si usa il parametro WTMASS per premoltiplicare la matrice di massa per 1/g
Modal Analysis of a Flate Plate
Input file
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
Modal Analysis of a Flate Plate
Diagnostica e stampa autovalori
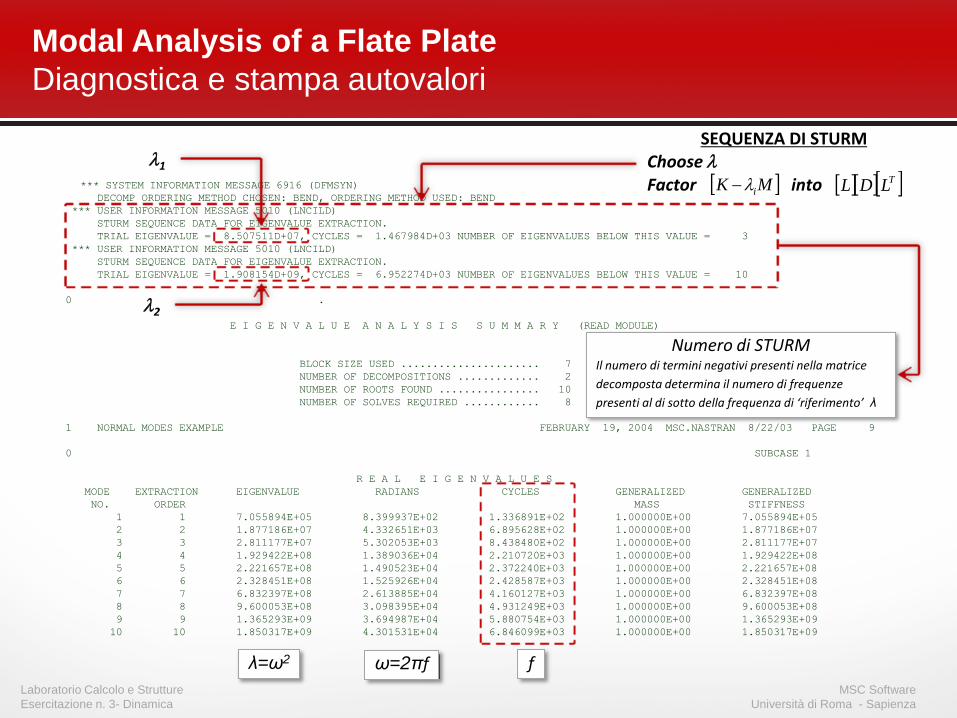
*** SYSTEM INFORMATION MESSAGE 6916 (DFMSYN)
DECOMP ORDERING METHOD CHOSEN: BEND, ORDERING METHOD USED: BEND
*** USER INFORMATION MESSAGE 5010 (LNCILD)
STURM SEQUENCE DATA FOR EIGENVALUE EXTRACTION.
TRIAL EIGENVALUE = 8.507511D+07, CYCLES = 1.467984D+03 NUMBER OF EIGENVALUES BELOW THIS VALUE = 3
*** USER INFORMATION MESSAGE 5010 (LNCILD)
STURM SEQUENCE DATA FOR EIGENVALUE EXTRACTION.
TRIAL EIGENVALUE = 1.908154D+09, CYCLES = 6.952274D+03 NUMBER OF EIGENVALUES BELOW THIS VALUE = 10
0 .
E I G E N V A L U E A N A L Y S I S S U M M A R Y (READ MODULE)
BLOCK SIZE USED ...................... 7
NUMBER OF DECOMPOSITIONS ............. 2
NUMBER OF ROOTS FOUND ................ 10
NUMBER OF SOLVES REQUIRED ............ 8
1 NORMAL MODES EXAMPLE FEBRUARY 19, 2004 MSC.NASTRAN 8/22/03 PAGE 9
0 SUBCASE 1
R E A L E I G E N V A L U E S
MODE EXTRACTION EIGENVALUE RADIANS CYCLES GENERALIZED GENERALIZED
NO. ORDER MASS STIFFNESS
1 1 7.055894E+05 8.399937E+02 1.336891E+02 1.000000E+00 7.055894E+05
2 2 1.877186E+07 4.332651E+03 6.895628E+02 1.000000E+00 1.877186E+07
3 3 2.811177E+07 5.302053E+03 8.438480E+02 1.000000E+00 2.811177E+07
4 4 1.929422E+08 1.389036E+04 2.210720E+03 1.000000E+00 1.929422E+08
5 5 2.221657E+08 1.490523E+04 2.372240E+03 1.000000E+00 2.221657E+08
6 6 2.328451E+08 1.525926E+04 2.428587E+03 1.000000E+00 2.328451E+08
7 7 6.832397E+08 2.613885E+04 4.160127E+03 1.000000E+00 6.832397E+08
8 8 9.600053E+08 3.098395E+04 4.931249E+03 1.000000E+00 9.600053E+08
9 9 1.365293E+09 3.694987E+04 5.880754E+03 1.000000E+00 1.365293E+09
10 10 1.850317E+09 4.301531E+04 6.846099E+03 1.000000E+00 1.850317E+09
f ω=2πf λ=ω2
Numero di STURM Il numero di termini negativi presenti nella matrice
decomposta determina il numero di frequenze
presenti al di sotto della frequenza di ‘riferimento’ λ
SEQUENZA DI STURM Choose Factor into MK i TLDL
1
2
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
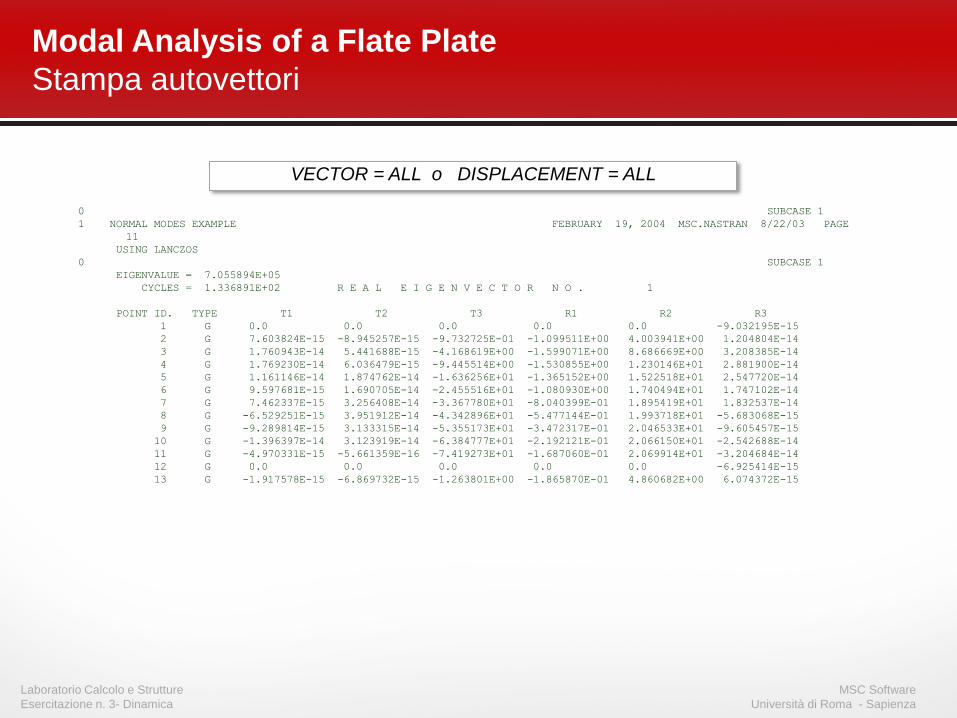
0 SUBCASE 1
1 NORMAL MODES EXAMPLE FEBRUARY 19, 2004 MSC.NASTRAN 8/22/03 PAGE
11
USING LANCZOS
0 SUBCASE 1
EIGENVALUE = 7.055894E+05
CYCLES = 1.336891E+02 R E A L E I G E N V E C T O R N O . 1
POINT ID. TYPE T1 T2 T3 R1 R2 R3
1 G 0.0 0.0 0.0 0.0 0.0 -9.032195E-15
2 G 7.603824E-15 -8.945257E-15 -9.732725E-01 -1.099511E+00 4.003941E+00 1.204804E-14
3 G 1.760943E-14 5.441688E-15 -4.168619E+00 -1.599071E+00 8.686669E+00 3.208385E-14
4 G 1.769230E-14 6.036479E-15 -9.445514E+00 -1.530855E+00 1.230146E+01 2.881900E-14
5 G 1.161146E-14 1.874762E-14 -1.636256E+01 -1.365152E+00 1.522518E+01 2.547720E-14
6 G 9.597681E-15 1.690705E-14 -2.455516E+01 -1.080930E+00 1.740494E+01 1.747102E-14
7 G 7.462337E-15 3.256408E-14 -3.367780E+01 -8.040399E-01 1.895419E+01 1.832537E-14
8 G -6.529251E-15 3.951912E-14 -4.342896E+01 -5.477144E-01 1.993718E+01 -5.683068E-15
9 G -9.289814E-15 3.133315E-14 -5.355173E+01 -3.472317E-01 2.046533E+01 -9.605457E-15
10 G -1.396397E-14 3.123919E-14 -6.384777E+01 -2.192121E-01 2.066150E+01 -2.542688E-14
11 G -4.970331E-15 -5.661359E-16 -7.419273E+01 -1.687060E-01 2.069914E+01 -3.204684E-14
12 G 0.0 0.0 0.0 0.0 0.0 -6.925414E-15
13 G -1.917578E-15 -6.869732E-15 -1.263801E+00 -1.865870E-01 4.860682E+00 6.074372E-15
Modal Analysis of a Flate Plate
Stampa autovettori
VECTOR = ALL o DISPLACEMENT = ALL
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
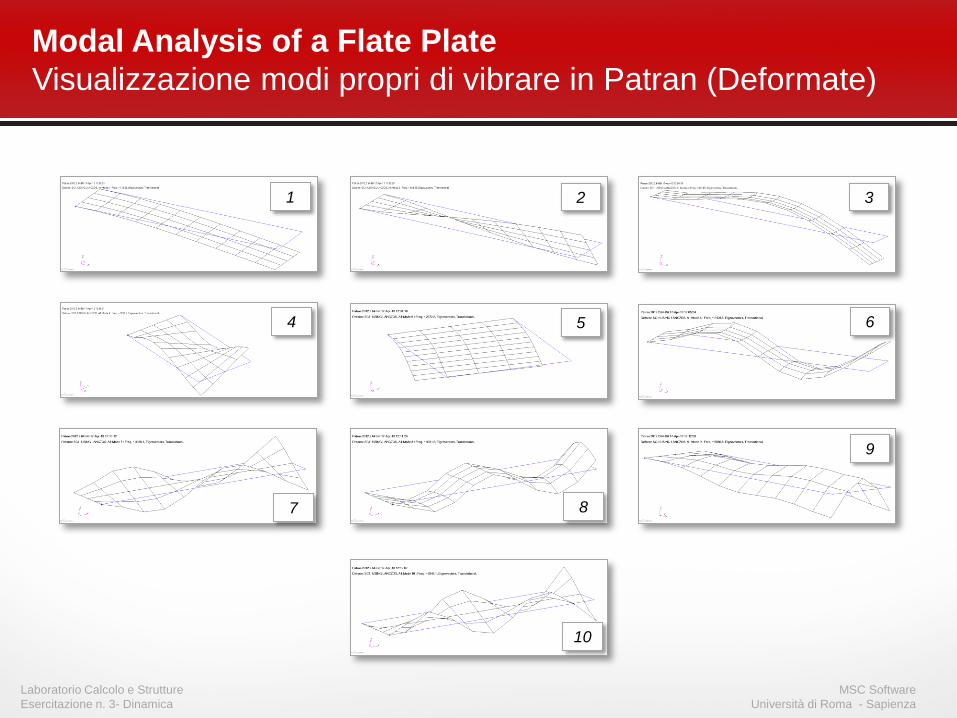
Modal Analysis of a Flate Plate
Visualizzazione modi propri di vibrare in Patran (Deformate)
1 2 3
4 5 6
7 8
9
10
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
1 2 3
4 5 6
7 8 9
10
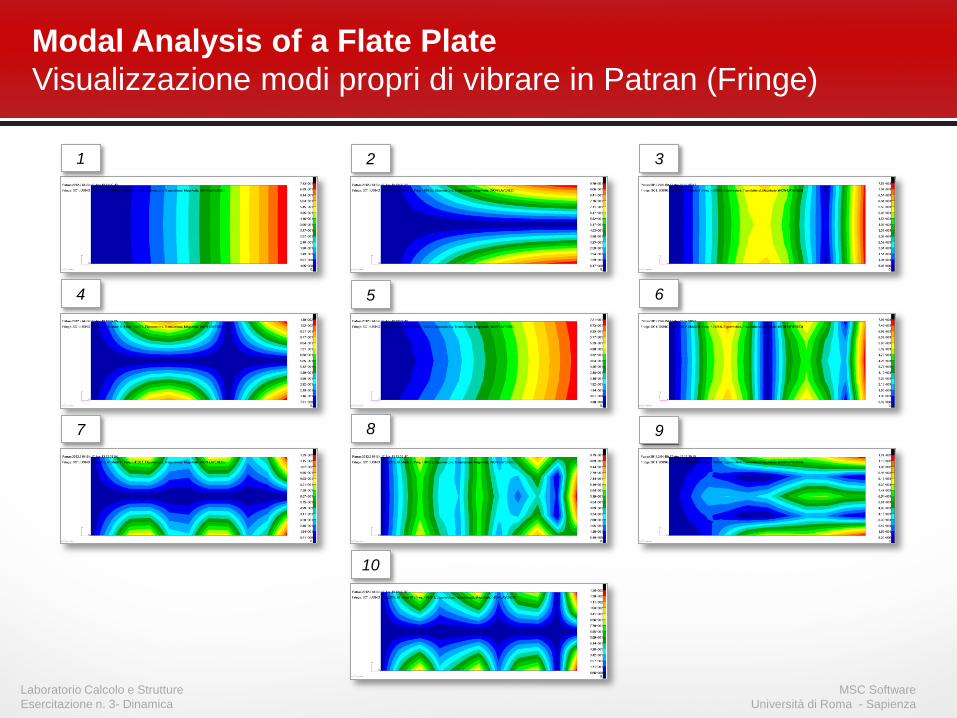
Modal Analysis of a Flate Plate
Visualizzazione modi propri di vibrare in Patran (Fringe)
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
• Calcola la risposta ad un carico variabile nel tempo
• Il carico è definito direttamente nel dominio del tempo
– Tutti carichi applicati sono noti in ciascun istante.
• Le risposte calcolate includono normalmente gli spostamenti
e le accelerazioni nodali, le forze e gli stress negli elementi
• L’analisi può essere eseguita secondo due diverse modalità:
– Metodo diretto
La soluzione si ottiene integrando nel tempo l’equazione della dinamica estesa
a tutti i gradi di libertà ‘dinamici’ della struttura
– Metodo modale
La soluzione si ottiene utilizzando una trasformazione di variabile che tenendo
conto del fatto che la risposta dinamica di un sistema è somma dei contributi
dei suoi modi propri di vibrare, espime il generico spostamento nella forma:
u = Σi ciΦi
Analisi della risposta al transitorio
Introduzione
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
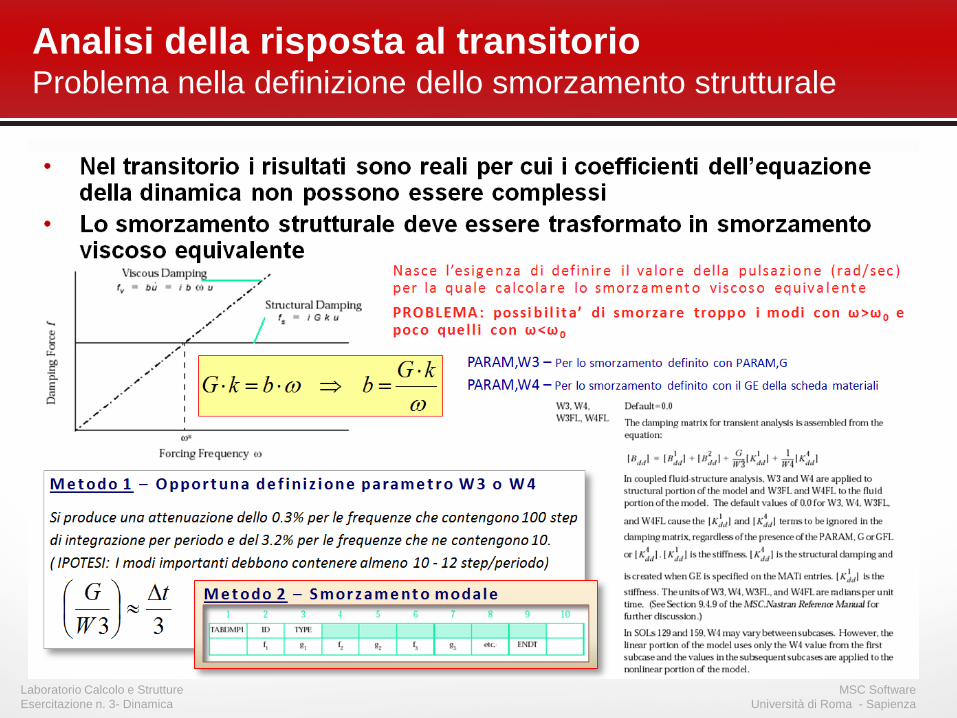
• Lo smorzamento e’, in generale, uno dei dati piu’ difficili da
definire in un calcolo dinamico
• Consente di rappresentare l’effetto dissipativo dovuto a:
‒ Fenomeni viscosi SMORZAMENTO VISCOSO
• Presenza di elementi smorzanti
‒ Fenomeni definibili genericamente come ‘ strutturali’
SMORZAMENTO STRUTTURALE
• Attrito interno al materiale
• Attriti esterni
• Forma geometrica (una superficie curva smorza piu’ di una piana)
• Connessioni (Nella zona di collegamento tra due parti della struttura si
potrebbero avere dei movimenti locali)
• Non linearita’ strutturali (Plasticita’)
Analisi della risposta al transitorio Smorzamento – Informazioni generali
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
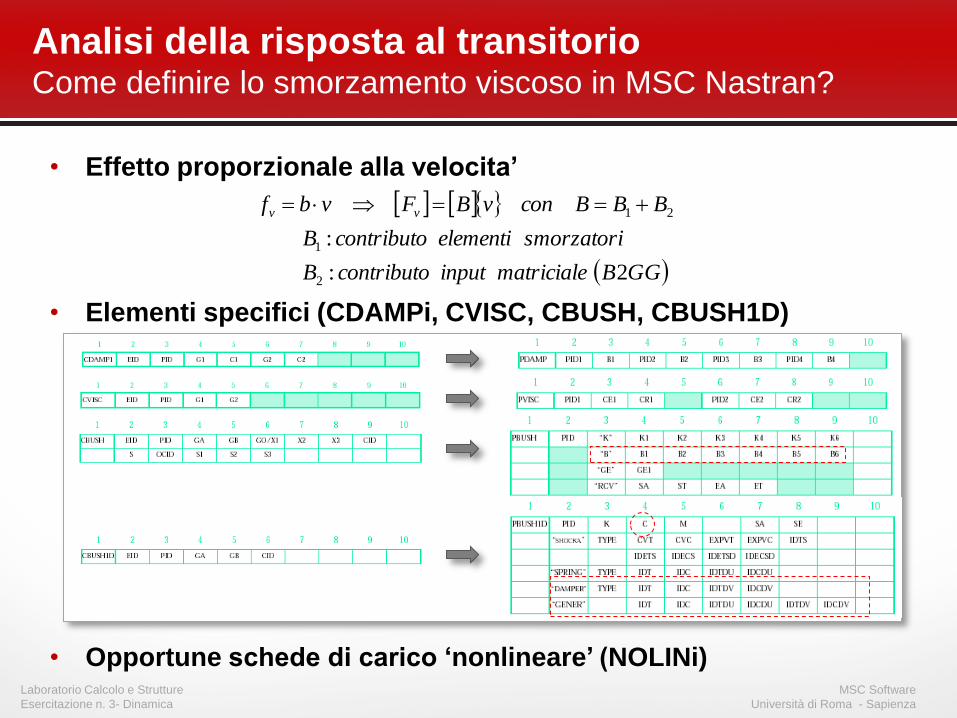
• Effetto proporzionale alla velocita’
• Elementi specifici (CDAMPi, CVISC, CBUSH, CBUSH1D)
• Opportune schede di carico ‘nonlineare’ (NOLINi)
GGBmatricialeinputcontributoB
smorzatorielementicontributoB
BBBconvBFvbf vv
2:
:
2
1
21
Analisi della risposta al transitorio Come definire lo smorzamento viscoso in MSC Nastran?
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
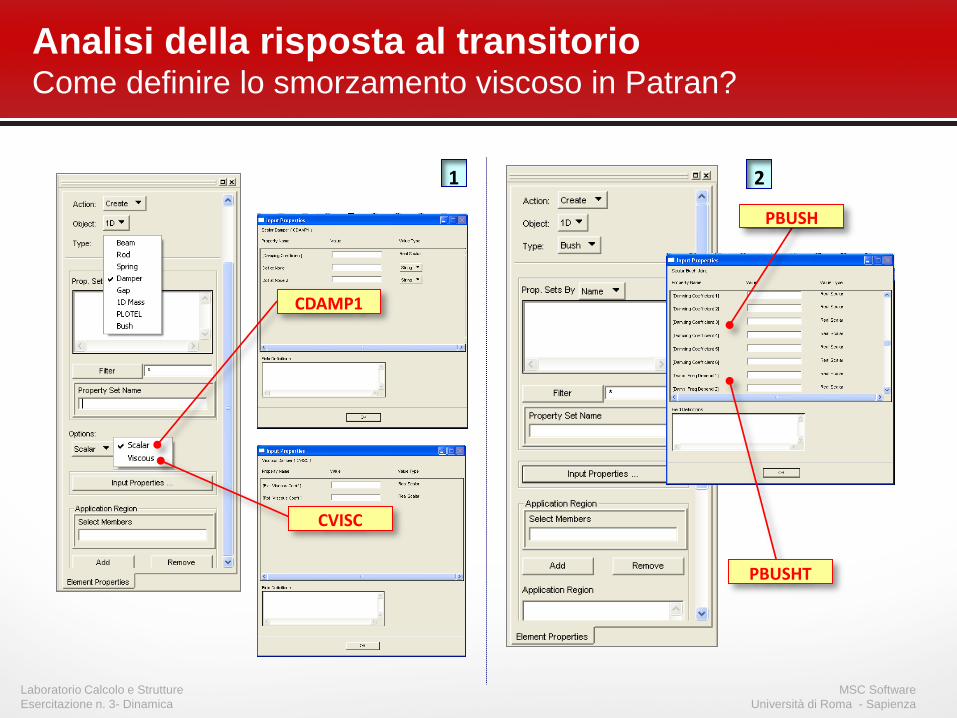
1 2
CDAMP1
CVISC
PBUSH
PBUSHT
Analisi della risposta al transitorio Come definire lo smorzamento viscoso in Patran?
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
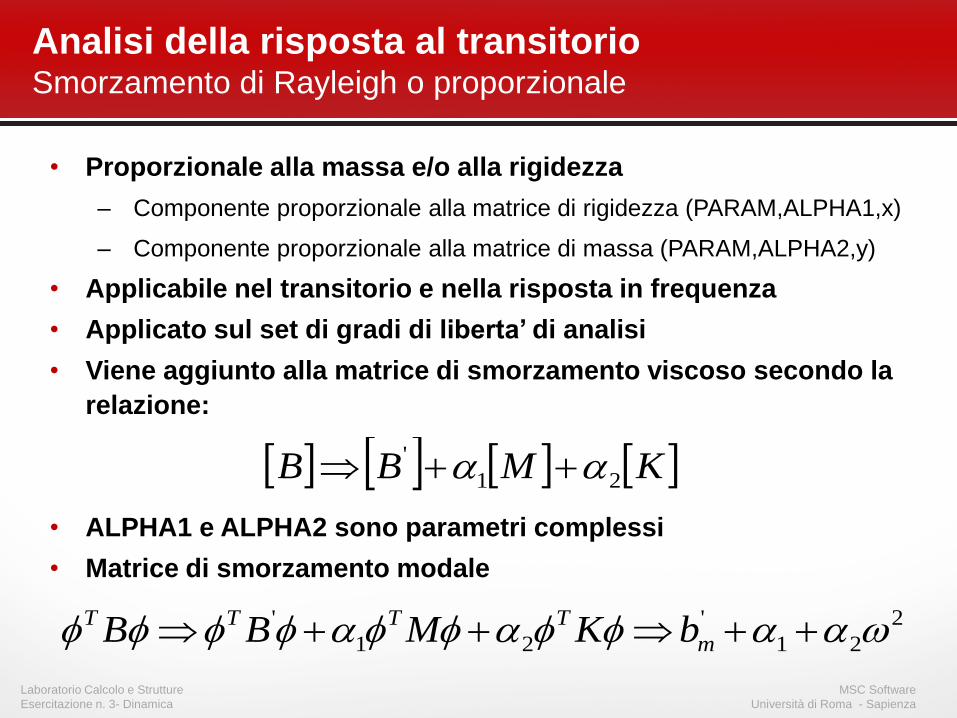
• Proporzionale alla massa e/o alla rigidezza
‒ Componente proporzionale alla matrice di rigidezza (PARAM,ALPHA1,x)
‒ Componente proporzionale alla matrice di massa (PARAM,ALPHA2,y)
• Applicabile nel transitorio e nella risposta in frequenza
• Applicato sul set di gradi di liberta’ di analisi
• Viene aggiunto alla matrice di smorzamento viscoso secondo la
relazione:
• ALPHA1 e ALPHA2 sono parametri complessi
• Matrice di smorzamento modale
2
21
'
21
' m
TTTT bKMBB
KMBB 21
'
Analisi della risposta al transitorio Smorzamento di Rayleigh o proporzionale
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
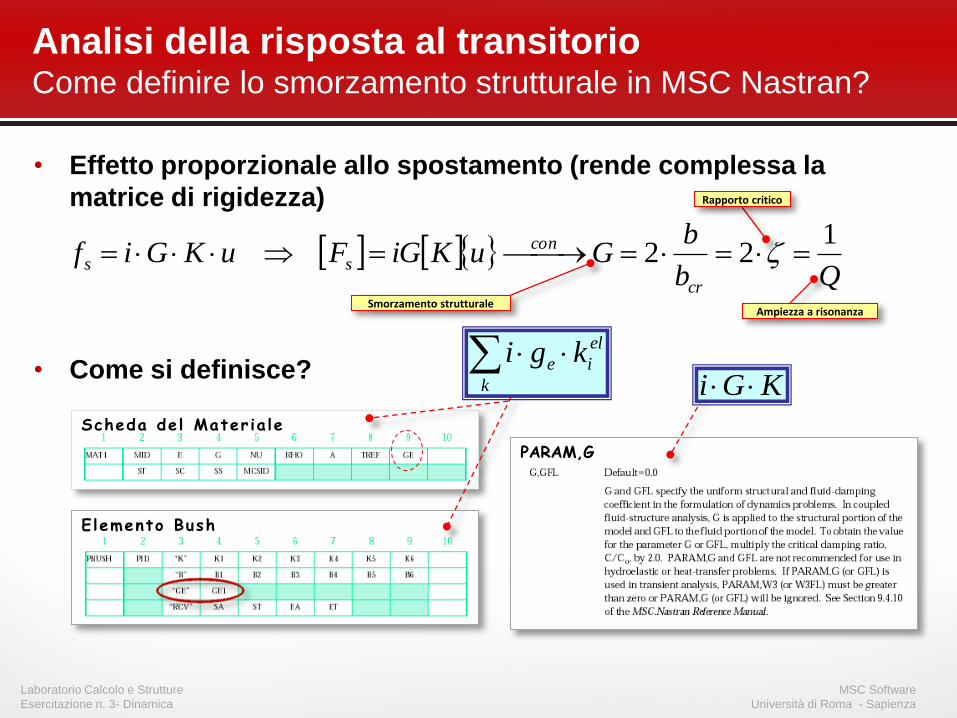
PARAM,G
Elemento Bush
Scheda del Materia le
• Effetto proporzionale allo spostamento (rende complessa la
matrice di rigidezza)
• Come si definisce?
Qb
bGuKiGFuKGif
cr
con
ss
122
Smorzamento strutturale
Rapporto critico
Ampiezza a risonanza
el
ie
k
kgi KGi
Analisi della risposta al transitorio Come definire lo smorzamento strutturale in MSC Nastran?

MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
PARAM,W4
PARAM,W3
PARAM,G
SMORZAMENTO GLOBALE
SMORZAMENTO LOCALE Opzi one ‘ Input Propert i es ’
de l l a sez i one ‘ Mater i a l s ’
1 2
3
SMORZAMENTO MODALE
Analisi della risposta al transitorio Come definire lo smorzamento strutturale in MSC Nastran?
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
Analisi della risposta al transitorio Problema nella definizione dello smorzamento strutturale
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
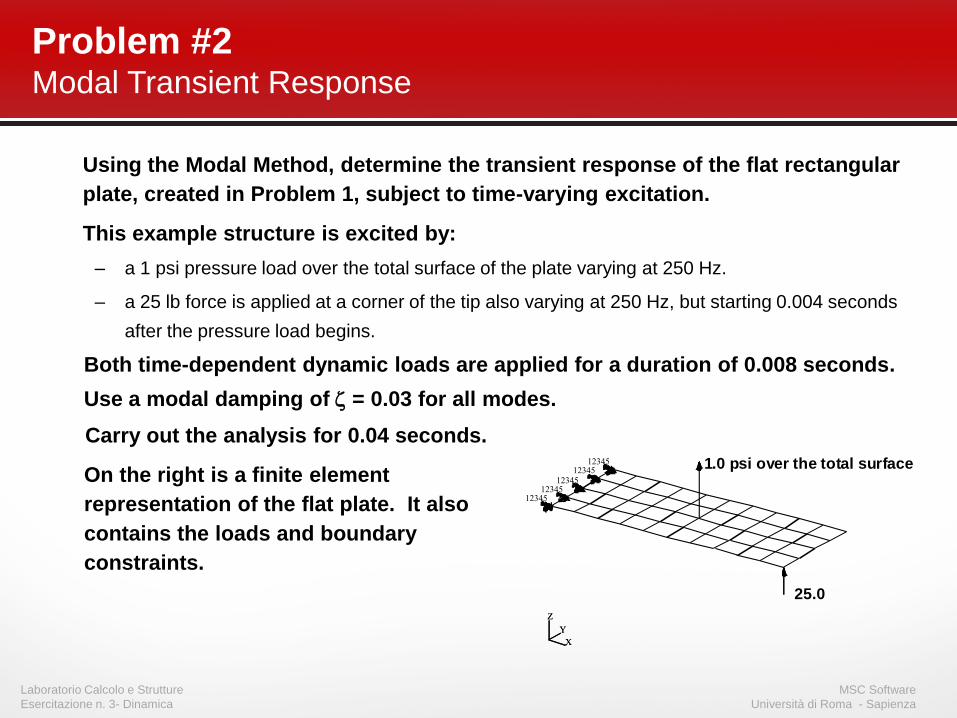
Using the Modal Method, determine the transient response of the flat rectangular
plate, created in Problem 1, subject to time-varying excitation.
This example structure is excited by:
– a 1 psi pressure load over the total surface of the plate varying at 250 Hz.
– a 25 lb force is applied at a corner of the tip also varying at 250 Hz, but starting 0.004 seconds
after the pressure load begins.
Both time-dependent dynamic loads are applied for a duration of 0.008 seconds.
Use a modal damping of = 0.03 for all modes.
X
Y
Z
12345
25.0
12345 12345
12345 12345 1.0 psi over the total surface
X
Y
Z
Problem #2 Modal Transient Response
Carry out the analysis for 0.04 seconds.
On the right is a finite element
representation of the flat plate. It also
contains the loads and boundary
constraints.
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
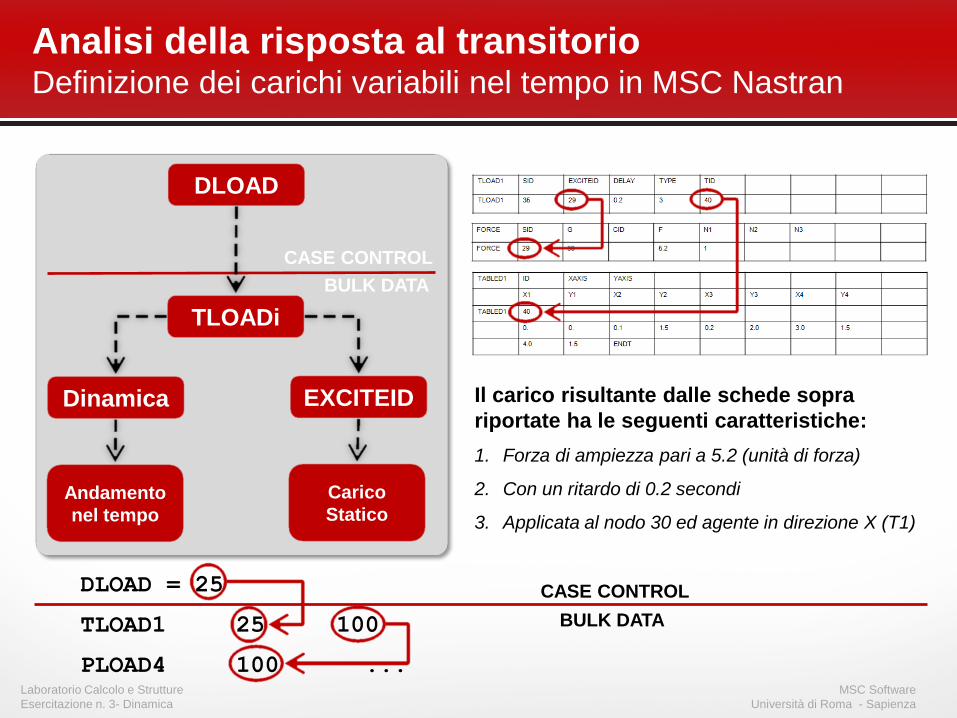
DLOAD
TLOADi
Dinamica EXCITEID
Andamento
nel tempo
Carico
Statico
Il carico risultante dalle schede sopra
riportate ha le seguenti caratteristiche:
1. Forza di ampiezza pari a 5.2 (unità di forza)
2. Con un ritardo di 0.2 secondi
3. Applicata al nodo 30 ed agente in direzione X (T1)
DLOAD = 25
TLOAD1 25 100
PLOAD4 100 ...
CASE CONTROL
BULK DATA
CASE CONTROL
BULK DATA
Analisi della risposta al transitorio Definizione dei carichi variabili nel tempo in MSC Nastran
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
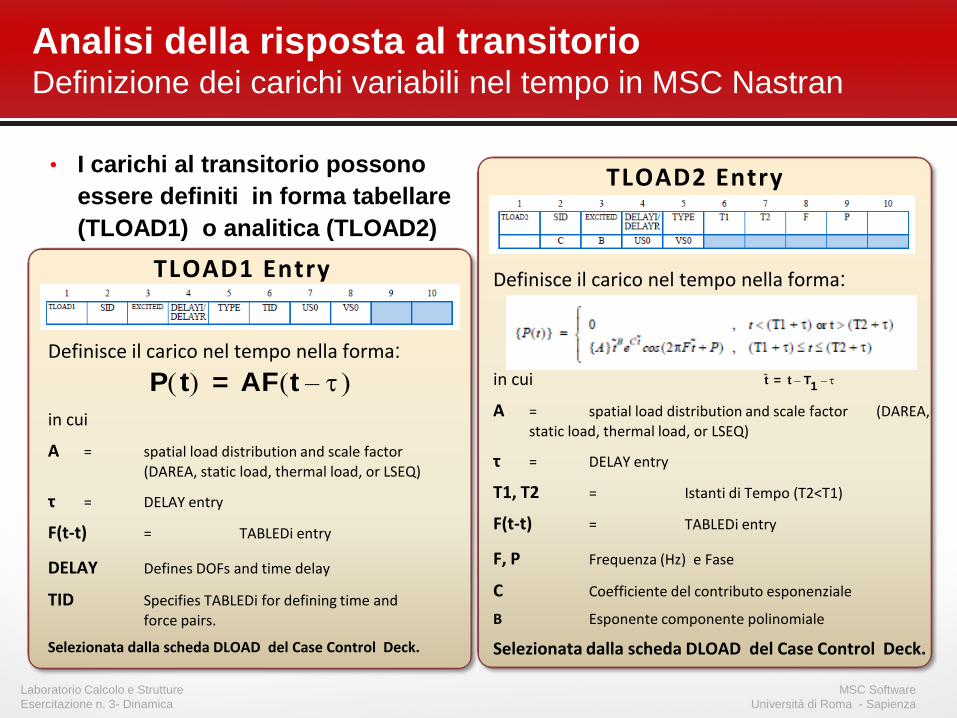
Definisce il carico nel tempo nella forma:
in cui
A = spatial load distribution and scale factor
(DAREA, static load, thermal load, or LSEQ)
τ = DELAY entry
F(t-t) = TABLEDi entry
DELAY Defines DOFs and time delay
TID Specifies TABLEDi for defining time and force pairs.
Selezionata dalla scheda DLOAD del Case Control Deck.
P t AF t – =
• I carichi al transitorio possono
essere definiti in forma tabellare
(TLOAD1) o analitica (TLOAD2)
Analisi della risposta al transitorio Definizione dei carichi variabili nel tempo in MSC Nastran
TLOAD1 Entry
TLOAD2 Entry
Definisce il carico nel tempo nella forma:
in cui
A = spatial load distribution and scale factor (DAREA, static load, thermal load, or LSEQ)
τ = DELAY entry
T1, T2 = Istanti di Tempo (T2<T1)
F(t-t) = TABLEDi entry
F, P Frequenza (Hz) e Fase
C Coefficiente del contributo esponenziale
B Esponente componente polinomiale
Selezionata dalla scheda DLOAD del Case Control Deck.
t̃ t T1
––=
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
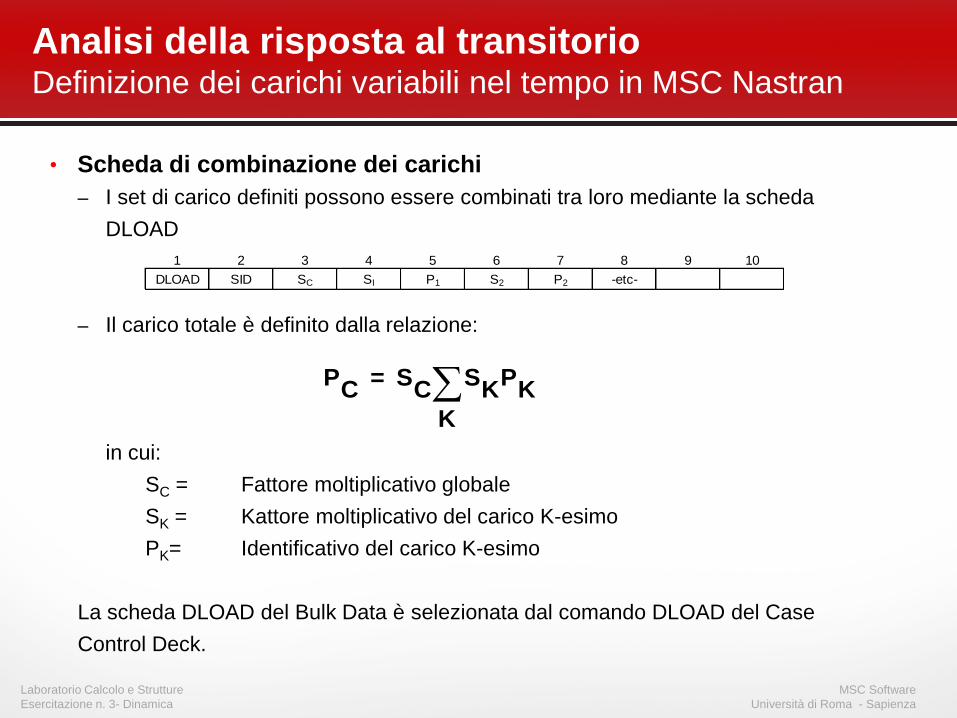
• Scheda di combinazione dei carichi
‒ I set di carico definiti possono essere combinati tra loro mediante la scheda
DLOAD
‒ Il carico totale è definito dalla relazione:
in cui:
SC = Fattore moltiplicativo globale
SK = Kattore moltiplicativo del carico K-esimo
PK= Identificativo del carico K-esimo
La scheda DLOAD del Bulk Data è selezionata dal comando DLOAD del Case
Control Deck.
1 2 3 4 5 6 7 8 9 10
DLOAD SID SC SI P1 S2 P2 -etc-
PC
SC
SK
PK
K
=
Analisi della risposta al transitorio Definizione dei carichi variabili nel tempo in MSC Nastran
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
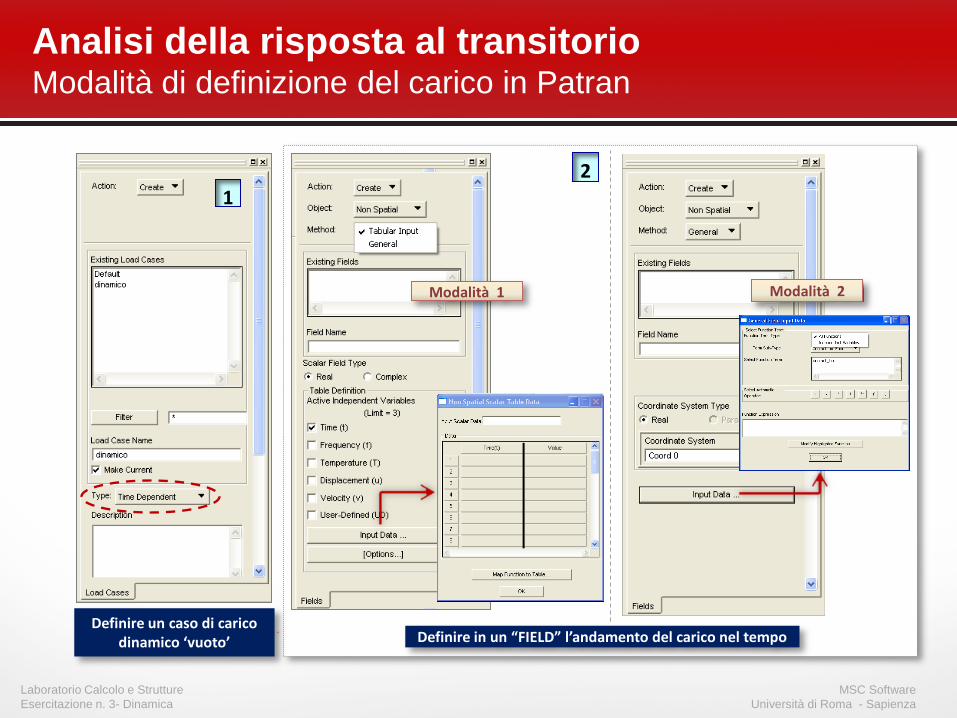
Analisi della risposta al transitorio Modalità di definizione del carico in Patran
Definire un caso di carico dinamico ‘vuoto’ Definire in un “FIELD” l’andamento del carico nel tempo
Modalità 1
1
2
Modalità 2

MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
Analisi della risposta al transitorio Modalità di definizione di un FIELD sinusoidale
Il field ‘sinusoidale_delay’ sarà definito nello stesso modo ma con:
Start Time = 0.004 End Time = 0.012
sinr(6.28*250*(‘t))
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
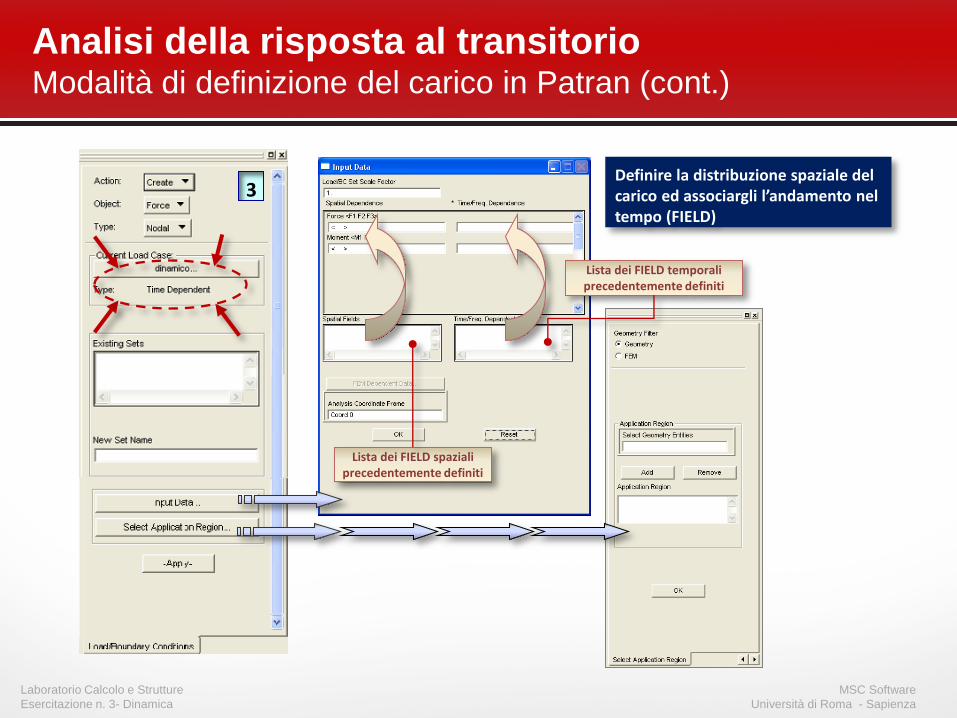
Analisi della risposta al transitorio Modalità di definizione del carico in Patran (cont.)
Definire la distribuzione spaziale del carico ed associargli l’andamento nel tempo (FIELD)
Lista dei FIELD temporali precedentemente definiti
Lista dei FIELD spaziali precedentemente definiti
3
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
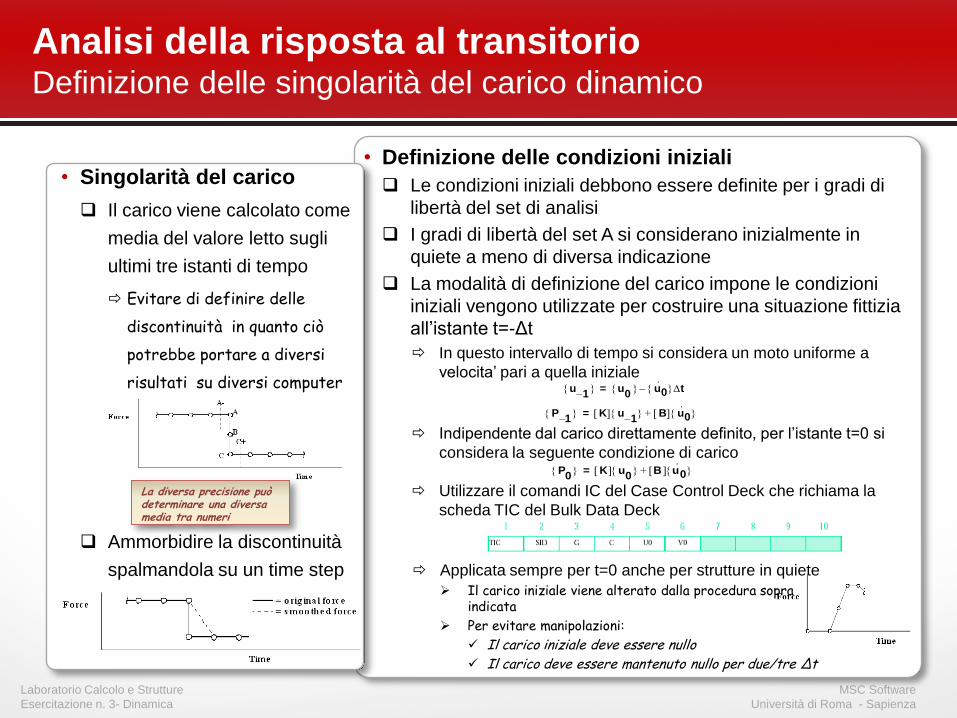
Analisi della risposta al transitorio Definizione delle singolarità del carico dinamico
Applicata sempre per t=0 anche per strutture in quiete
Il carico iniziale viene alterato dalla procedura sopra indicata
Per evitare manipolazioni:
Il carico iniziale deve essere nullo
Il carico deve essere mantenuto nullo per due/tre Δt
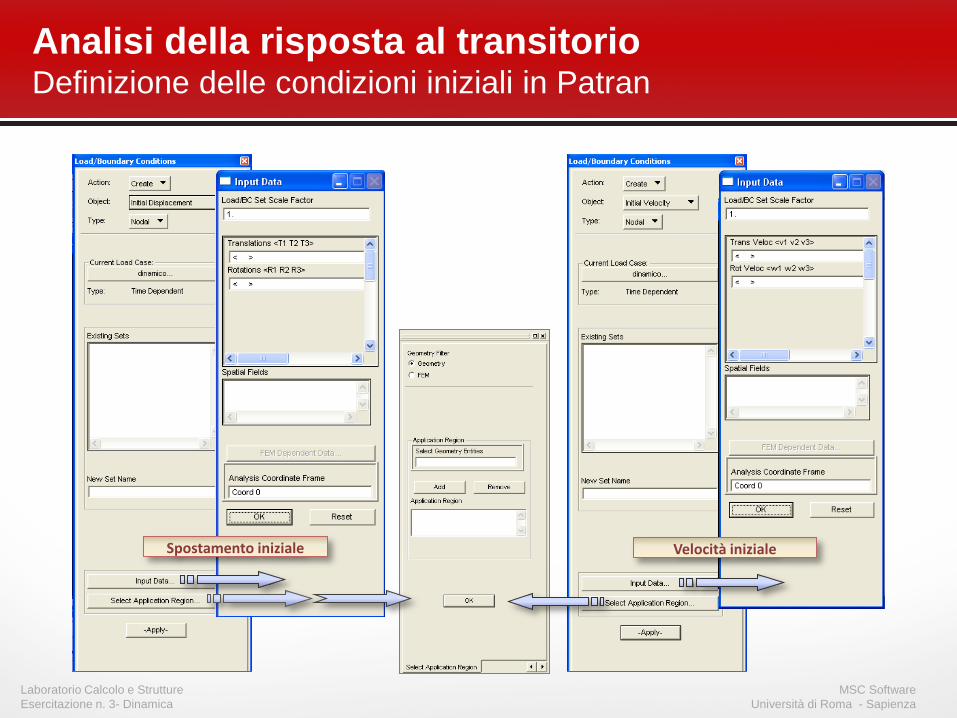
• Definizione delle condizioni iniziali
Le condizioni iniziali debbono essere definite per i gradi di
libertà del set di analisi
I gradi di libertà del set A si considerano inizialmente in
quiete a meno di diversa indicazione
La modalità di definizione del carico impone le condizioni
iniziali vengono utilizzate per costruire una situazione fittizia
all’istante t=-Δt
In questo intervallo di tempo si considera un moto uniforme a
velocita’ pari a quella iniziale
Indipendente dal carico direttamente definito, per l’istante t=0 si
considera la seguente condizione di carico
Utilizzare il comandi IC del Case Control Deck che richiama la
scheda TIC del Bulk Data Deck
u1–
u0
u·0 t–=
P1–
K u1–
B u·0 +=
P0
K u0
B u·0 +=
• Singolarità del carico
Il carico viene calcolato come
media del valore letto sugli
ultimi tre istanti di tempo
Evitare di definire delle
discontinuità in quanto ciò
potrebbe portare a diversi
risultati su diversi computer
Ammorbidire la discontinuità
spalmandola su un time step
La diversa precisione può determinare una diversa media tra numeri
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
Spostamento iniziale
Analisi della risposta al transitorio Definizione delle condizioni iniziali in Patran
Velocità iniziale
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
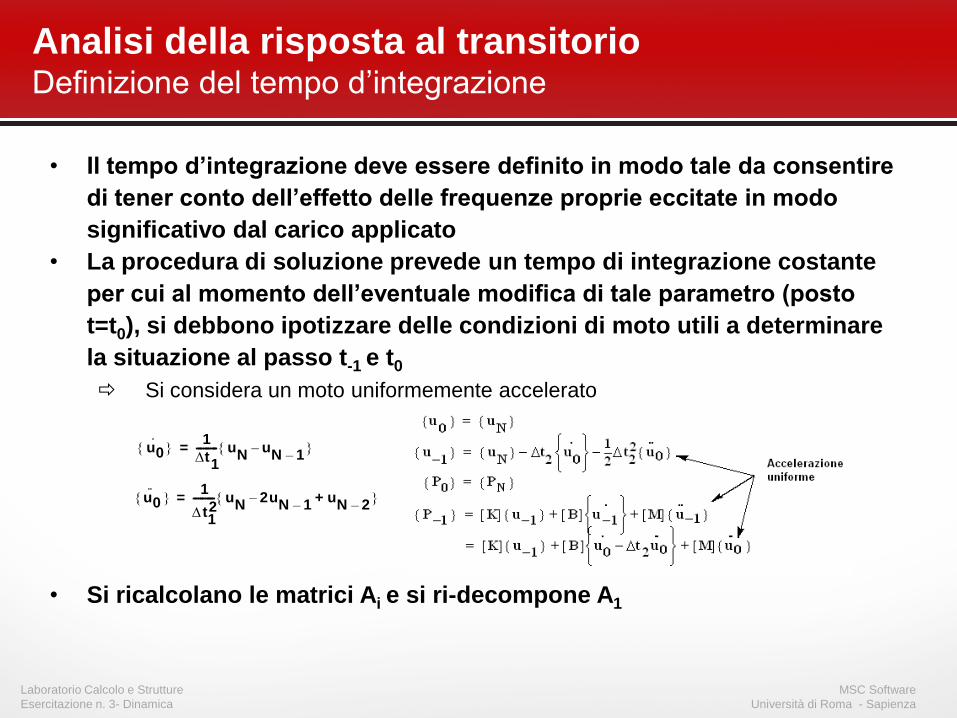
• Il tempo d’integrazione deve essere definito in modo tale da consentire
di tener conto dell’effetto delle frequenze proprie eccitate in modo
significativo dal carico applicato
• La procedura di soluzione prevede un tempo di integrazione costante
per cui al momento dell’eventuale modifica di tale parametro (posto
t=t0), si debbono ipotizzare delle condizioni di moto utili a determinare
la situazione al passo t-1 e t0
Si considera un moto uniformemente accelerato
• Si ricalcolano le matrici Ai e si ri-decompone A1
u·0
1
t1
--------- uN
uN 1–
– =
u··0
1
t12
--------- uN
2uN 1–
– uN 2–
+ =
Analisi della risposta al transitorio Definizione del tempo d’integrazione
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
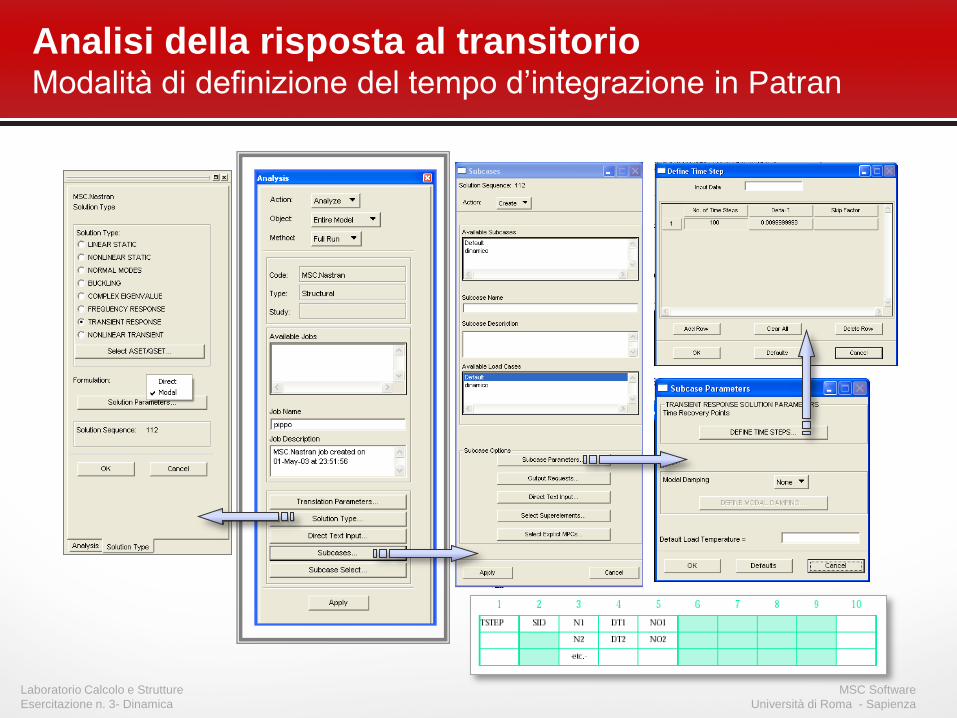
Analisi della risposta al transitorio Modalità di definizione del tempo d’integrazione in Patran
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
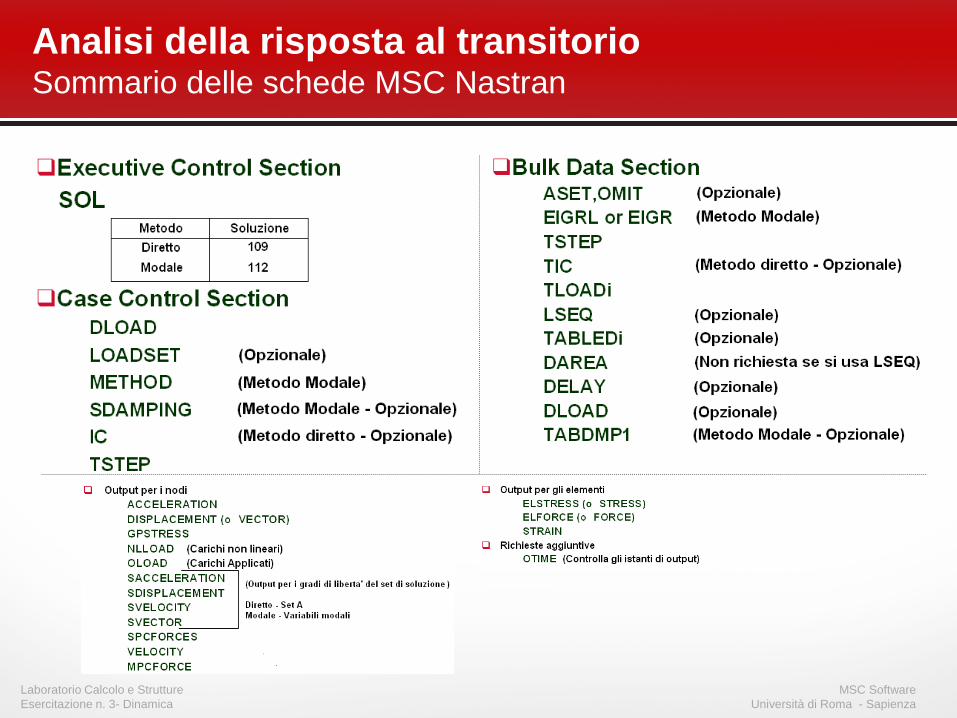
Analisi della risposta al transitorio Sommario delle schede MSC Nastran
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
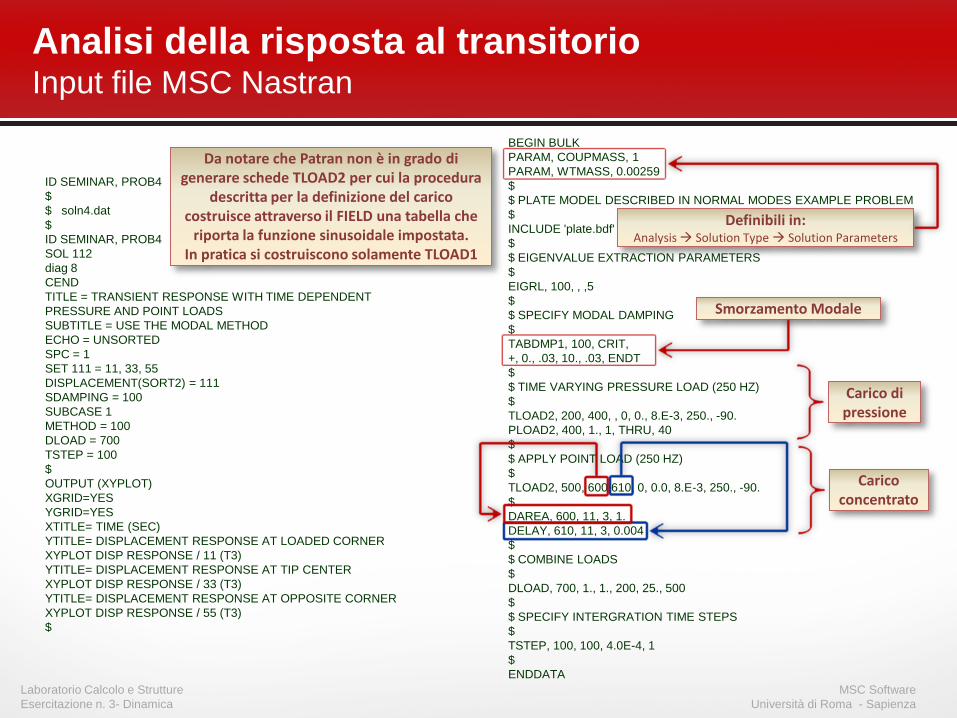
Analisi della risposta al transitorio Input file MSC Nastran
ID SEMINAR, PROB4
$
$ soln4.dat
$
ID SEMINAR, PROB4
SOL 112
diag 8
CEND
TITLE = TRANSIENT RESPONSE WITH TIME DEPENDENT
PRESSURE AND POINT LOADS
SUBTITLE = USE THE MODAL METHOD
ECHO = UNSORTED
SPC = 1
SET 111 = 11, 33, 55
DISPLACEMENT(SORT2) = 111
SDAMPING = 100
SUBCASE 1
METHOD = 100
DLOAD = 700
TSTEP = 100
$
OUTPUT (XYPLOT)
XGRID=YES
YGRID=YES
XTITLE= TIME (SEC)
YTITLE= DISPLACEMENT RESPONSE AT LOADED CORNER
XYPLOT DISP RESPONSE / 11 (T3)
YTITLE= DISPLACEMENT RESPONSE AT TIP CENTER
XYPLOT DISP RESPONSE / 33 (T3)
YTITLE= DISPLACEMENT RESPONSE AT OPPOSITE CORNER
XYPLOT DISP RESPONSE / 55 (T3)
$
BEGIN BULK
PARAM, COUPMASS, 1
PARAM, WTMASS, 0.00259
$
$ PLATE MODEL DESCRIBED IN NORMAL MODES EXAMPLE PROBLEM
$
INCLUDE 'plate.bdf'
$
$ EIGENVALUE EXTRACTION PARAMETERS
$
EIGRL, 100, , ,5
$
$ SPECIFY MODAL DAMPING
$
TABDMP1, 100, CRIT,
+, 0., .03, 10., .03, ENDT
$
$ TIME VARYING PRESSURE LOAD (250 HZ)
$
TLOAD2, 200, 400, , 0, 0., 8.E-3, 250., -90.
PLOAD2, 400, 1., 1, THRU, 40
$
$ APPLY POINT LOAD (250 HZ)
$
TLOAD2, 500, 600,610, 0, 0.0, 8.E-3, 250., -90.
$
DAREA, 600, 11, 3, 1.
DELAY, 610, 11, 3, 0.004
$
$ COMBINE LOADS
$
DLOAD, 700, 1., 1., 200, 25., 500
$
$ SPECIFY INTERGRATION TIME STEPS
$
TSTEP, 100, 100, 4.0E-4, 1
$
ENDDATA
Smorzamento Modale
Da notare che Patran non è in grado di generare schede TLOAD2 per cui la procedura
descritta per la definizione del carico costruisce attraverso il FIELD una tabella che
riporta la funzione sinusoidale impostata. In pratica si costruiscono solamente TLOAD1
Definibili in: Analysis Solution Type Solution Parameters
Carico di pressione
Carico concentrato
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
R E A L E I G E N V A L U E S
(BEFORE AUGMENTATION OF RESIDUAL VECTORS)
MODE EXTRACTION EIGENVALUE RADIANS CYCLES GENERALIZED GENERALIZED
NO. ORDER MASS STIFFNESS
1 1 7.055894E+05 8.399937E+02 1.336891E+02 1.000000E+00 7.055894E+05
2 2 1.877186E+07 4.332651E+03 6.895628E+02 1.000000E+00 1.877186E+07
3 3 2.811177E+07 5.302053E+03 8.438480E+02 1.000000E+00 2.811177E+07
4 4 1.929422E+08 1.389036E+04 2.210720E+03 1.000000E+00 1.929422E+08
5 5 2.221657E+08 1.490523E+04 2.372240E+03 1.000000E+00 2.221657E+08
R E A L E I G E N V A L U E S
(AFTER AUGMENTATION OF RESIDUAL VECTORS)
MODE EXTRACTION EIGENVALUE RADIANS CYCLES GENERALIZED GENERALIZED
NO. ORDER MASS STIFFNESS
1 1 7.055894E+05 8.399937E+02 1.336891E+02 1.000000E+00 7.055894E+05
2 2 1.877186E+07 4.332651E+03 6.895628E+02 1.000000E+00 1.877186E+07
3 3 2.811176E+07 5.302053E+03 8.438479E+02 1.000000E+00 2.811176E+07
4 4 1.929422E+08 1.389036E+04 2.210720E+03 1.000000E+00 1.929422E+08
5 5 2.221657E+08 1.490523E+04 2.372240E+03 1.000000E+00 2.221657E+08
6 6 2.351324E+08 1.533403E+04 2.440486E+03 1.000000E+00 2.351324E+08
7 7 7.974902E+08 2.823987E+04 4.494515E+03 1.000000E+00 7.974902E+08
8 8 1.453224E+09 3.812117E+04 6.067173E+03 1.000000E+00 1.453224E+09
9 9 2.625274E+09 5.123743E+04 8.154690E+03 1.000000E+00 2.625274E+09
10 10 4.154733E+09 6.445722E+04 1.025868E+04 1.000000E+00 4.154733E+09
11 11 4.205890E+09 6.485284E+04 1.032165E+04 1.000000E+00 4.205890E+09
12 12 3.216783E+10 1.793539E+05 2.854506E+04 1.000000E+00 3.216783E+10
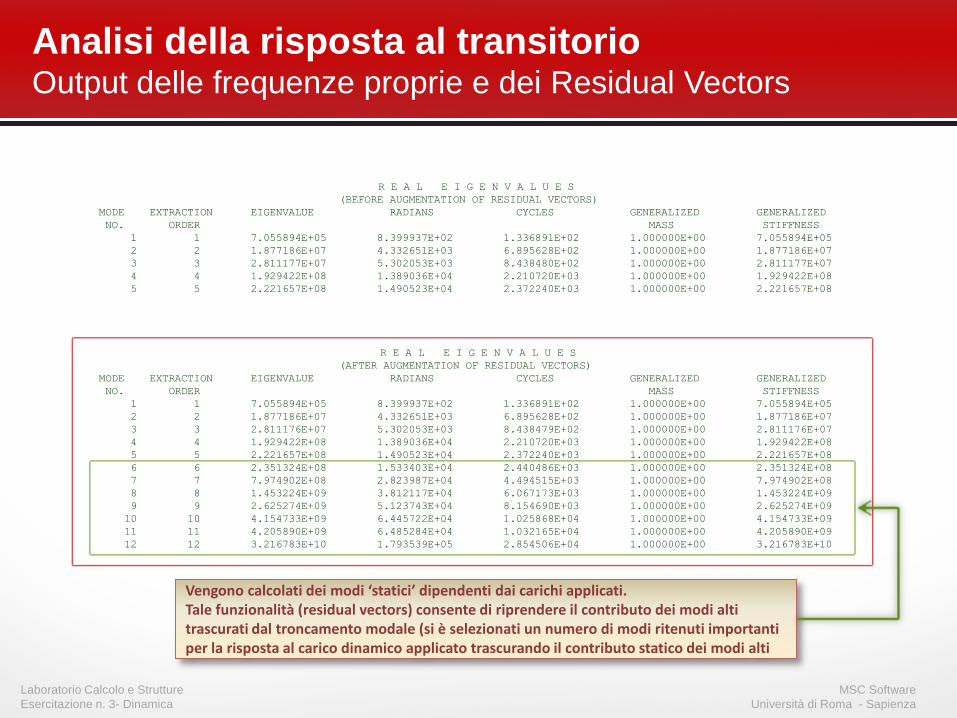
Vengono calcolati dei modi ‘statici’ dipendenti dai carichi applicati. Tale funzionalità (residual vectors) consente di riprendere il contributo dei modi alti trascurati dal troncamento modale (si è selezionati un numero di modi ritenuti importanti per la risposta al carico dinamico applicato trascurando il contributo statico dei modi alti
Analisi della risposta al transitorio Output delle frequenze proprie e dei Residual Vectors

MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
Analisi della risposta al transitorio Formato di output dei risultati
POINT-ID = 11
D I S P L A C E M E N T V E C T O R
TIME TYPE T1 T2 T3 R1 R2 R3
0.0 G 0.0 0.0 0.0 0.0 0.0 0.0
4.000000E-04 G 1.117051E-15 2.162474E-15 2.038250E-04 -3.199117E-06 2.623944E-05 2.192824E-15
8.000000E-04 G 7.217471E-15 1.425887E-14 1.980818E-03 -1.510275E-05 -2.074038E-04 1.482996E-14
1.200000E-03 G 1.936345E-14 3.928404E-14 6.911292E-03 4.029357E-07 -1.653521E-03 4.092337E-14
1.600000E-03 G 3.655002E-14 7.482046E-14 1.407448E-02 2.646134E-05 -3.815677E-03 7.801936E-14
2.000000E-03 G 5.435854E-14 1.114142E-13 2.121053E-02 4.361140E-05 -5.847335E-03 1.162720E-13
POINT-ID = 33
D I S P L A C E M E N T V E C T O R
TIME TYPE T1 T2 T3 R1 R2 R3
0.0 G 0.0 0.0 0.0 0.0 0.0 0.0
4.000000E-04 G -9.301904E-16 2.147446E-15 2.019039E-04 1.682612E-08 2.577562E-05 2.317858E-15
8.000000E-04 G -6.661062E-15 1.416836E-14 1.971792E-03 -1.131671E-09 -2.092973E-04 1.569698E-14
1.200000E-03 G -1.901651E-14 3.905672E-14 6.911632E-03 -3.483774E-08 -1.653002E-03 4.334433E-14
1.600000E-03 G -3.667159E-14 7.440212E-14 1.409060E-02 -1.660550E-08 -3.811871E-03 8.265729E-14
2.000000E-03 G -5.477616E-14 1.107944E-13 2.123710E-02 1.823268E-10 -5.841007E-03 1.231890E-13
2.400000E-03 G -6.629200E-14 1.335880E-13 2.615920E-02 1.754091E-08 -7.446125E-03 1.485559E-13
2.800000E-03 G -6.551998E-14 1.317307E-13 2.613206E-02 2.261821E-08 -7.588133E-03 1.465041E-13
POINT-ID = 55
D I S P L A C E M E N T V E C T O R
TIME TYPE T1 T2 T3 R1 R2 R3
0.0 G 0.0 0.0 0.0 0.0 0.0 0.0
4.000000E-04 G -3.448642E-15 2.437525E-15 2.038511E-04 3.216275E-06 2.622230E-05 2.837645E-15
8.000000E-04 G -2.369344E-14 1.610352E-14 1.980840E-03 1.514255E-05 -2.074704E-04 1.914086E-14
1.200000E-03 G -6.597501E-14 4.430786E-14 6.911171E-03 -5.569045E-07 -1.653289E-03 5.263890E-14
1.600000E-03 G -1.261797E-13 8.436236E-14 1.407446E-02 -2.646987E-05 -3.815674E-03 1.002550E-13
2.000000E-03 G -1.881637E-13 1.256248E-13 2.121054E-02 -4.360946E-05 -5.847338E-03 1.493821E-13
2.400000E-03 G -2.271204E-13 1.514387E-13 2.611754E-02 -6.863064E-05 -7.455783E-03 1.800641E-13
2.800000E-03 G -2.241110E-13 1.493142E-13 2.608514E-02 -7.741245E-05 -7.598883E-03 1.775290E-13
3.200000E-03 G -1.709480E-13 1.138696E-13 1.986141E-02 -5.680266E-05 -5.762664E-03 1.354259E-13
3.600000E-03 G -7.310554E-14 4.863723E-14 8.672326E-03 -2.997876E-05 -2.603049E-03 5.783071E-14 Il f
orm
ato
di o
utp
ut
di d
efau
lt p
er
i ris
ult
ati c
orr
isp
on
de
a q
ue
llo
tip
ico
di u
n d
iagr
amm
a X
Y. In
so
stan
za s
i rip
ort
a p
er
ogn
i no
do
il
risu
ltat
o p
er
tutt
i gli
ista
nti
co
nsi
de
rati
ne
ll’an
alis
i (SO
RT2
).
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
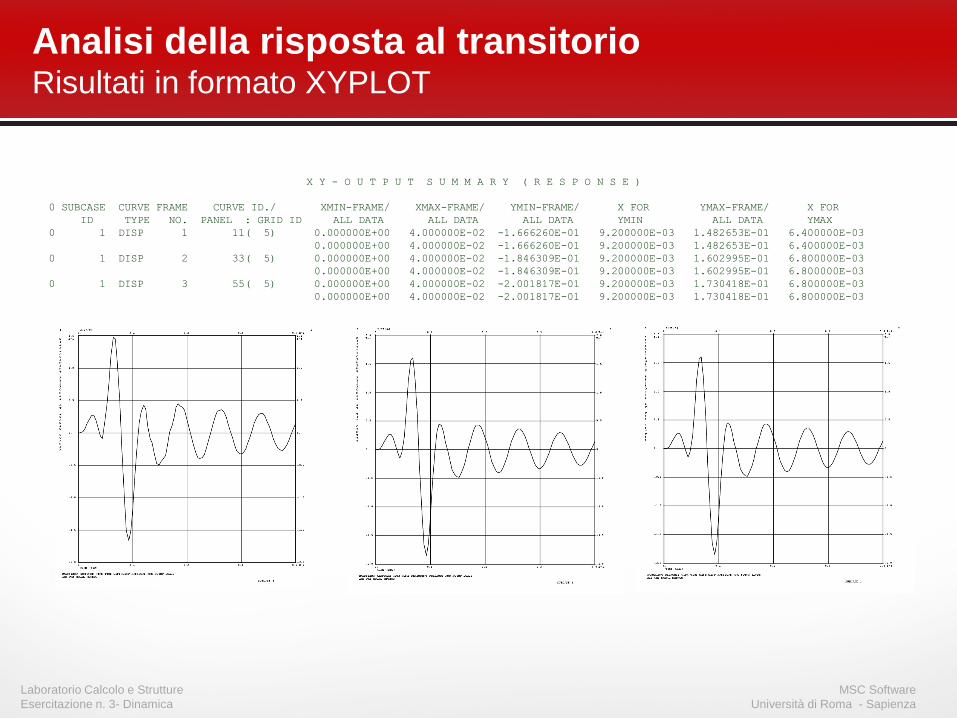
X Y - O U T P U T S U M M A R Y ( R E S P O N S E )
0 SUBCASE CURVE FRAME CURVE ID./ XMIN-FRAME/ XMAX-FRAME/ YMIN-FRAME/ X FOR YMAX-FRAME/ X FOR
ID TYPE NO. PANEL : GRID ID ALL DATA ALL DATA ALL DATA YMIN ALL DATA YMAX
0 1 DISP 1 11( 5) 0.000000E+00 4.000000E-02 -1.666260E-01 9.200000E-03 1.482653E-01 6.400000E-03
0.000000E+00 4.000000E-02 -1.666260E-01 9.200000E-03 1.482653E-01 6.400000E-03
0 1 DISP 2 33( 5) 0.000000E+00 4.000000E-02 -1.846309E-01 9.200000E-03 1.602995E-01 6.800000E-03
0.000000E+00 4.000000E-02 -1.846309E-01 9.200000E-03 1.602995E-01 6.800000E-03
0 1 DISP 3 55( 5) 0.000000E+00 4.000000E-02 -2.001817E-01 9.200000E-03 1.730418E-01 6.800000E-03
0.000000E+00 4.000000E-02 -2.001817E-01 9.200000E-03 1.730418E-01 6.800000E-03
Analisi della risposta al transitorio Risultati in formato XYPLOT
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
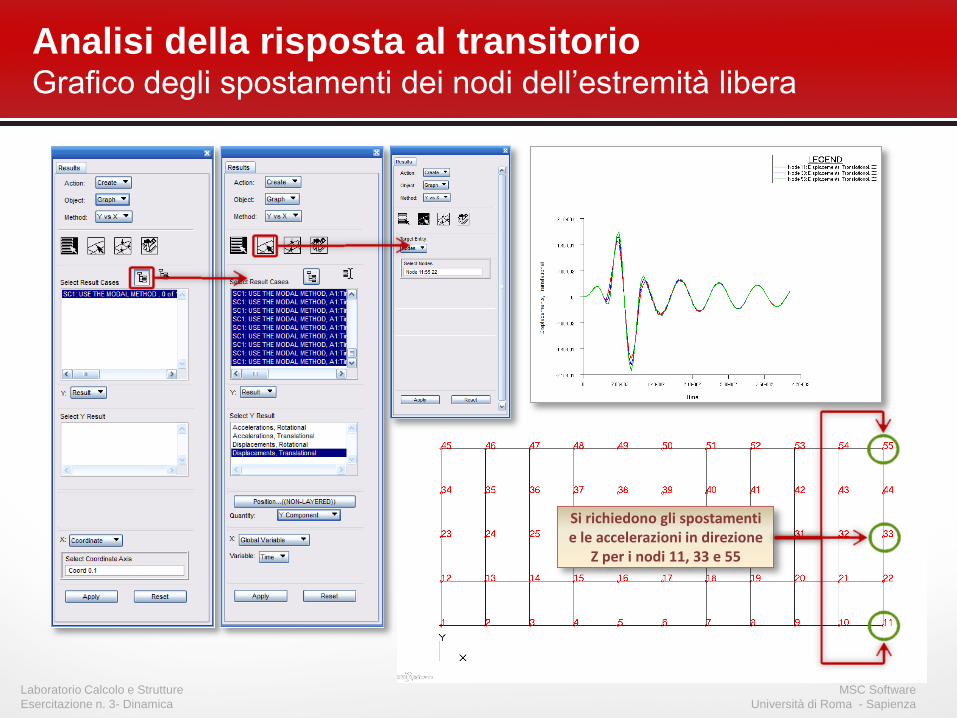
Analisi della risposta al transitorio Grafico degli spostamenti dei nodi dell’estremità libera
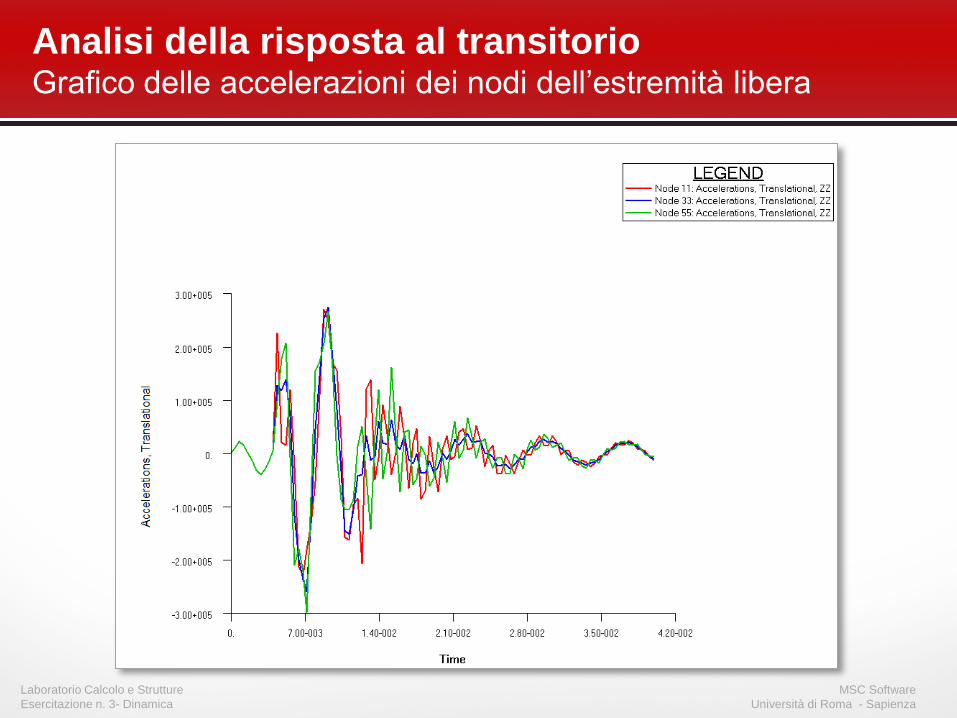
Si richiedono gli spostamenti e le accelerazioni in direzione
Z per i nodi 11, 33 e 55
MSC Software
Università di Roma - Sapienza
Laboratorio Calcolo e Strutture
Esercitazione n. 3- Dinamica
Analisi della risposta al transitorio Grafico delle accelerazioni dei nodi dell’estremità libera