Modelli Matematici per la Meccanica
136
Appunti per il corso di Modelli Matematici per la Meccanica Daniele Andreucci Dipartimento di Metodi e Modelli Matematici Universit`a di Roma LaSapienza via Antonio Scarpa 16 00161 Roma, Italy [email protected] a.a. 2009–2010 versione definitiva
-
Upload
massimo-moroni -
Category
Documents
-
view
42 -
download
1
description
Appunti per il corso diModelli Matematici per la MeccanicaDaniele AndreucciDipartimento di Metodi e Modelli MatematiciUniversità di Roma La Sapienza
Transcript of Modelli Matematici per la Meccanica

Appunti per il corso di
Modelli Matematici per la Meccanica
Daniele Andreucci
Dipartimento di Metodi e Modelli Matematici
Universita di Roma La Sapienza
via Antonio Scarpa 16 00161 Roma, Italy
a.a. 2009–2010
versione definitiva

mmm 20091220 15.03c©2009 Daniele AndreucciTutti i diritti riservati–All rights reserved

Introduzione
Questa e la versione definitiva degli Appunti per il corso di Modelli Mate-matici per la Meccanica, tenuto per il Corso di Laurea in Ingegneria Aero-spaziale dell’Universita La Sapienza di Roma, anno accademico 2009/2010.Eventuali correzioni a questa versione definitiva verranno segna-
late in una Errata Corrige, che apparira sul sito del corso.
Programma d’esame
Il programma consiste, con riferimento ai presenti Appunti, di:
• Capitolo 1, tutto, ad eccezione di: Definizione 1.14, Proposizione 1.16,Teorema 1.20, Teorema 1.21, Teorema 1.25, Sottosezione 1.5.1.
• Capitolo 2, tutto.• Capitolo 3, tutto, ad eccezione della Sottosezione 3.3.1.• Capitolo 4, tutto, ad eccezione delle dimostrazioni della Sezione 4.5, e
del Teorema 4.31, che tuttavia puo (a scelta) sostituire il Teorema 4.36.• Capitolo 5, tutto.• Capitolo 6, tutto, ad eccezione del Lemma 6.6 e delle dimostrazioni
della Sezione 6.5.• Capitolo 7, tutto, ad eccezione della Sezione 7.3.• Capitolo 8, tutto, ad eccezione della dimostrazione del Lemma 8.3.• Capitolo 9, tutto, ad eccezione della Proposizione 9.4 e della Sottose-
zione 9.2.2.
Formano come e ovvio parte del programma anche le tecniche di risoluzionedegli esercizi, che vengono resi disponibili sul sito del corso.
Le Appendici contengono risultati che possono venire usati nel corso, ma nonne fanno parte in senso proprio (prerequisiti, complementi tecnici, alcunirisultati di calcoli complicati).
iii


Indice
Introduzione iii
Parte 1. Cenni alla stabilita dell’equilibrio 1
Capitolo 1. Equazioni differenziali 31.1. Esistenza, unicita e dipendenza continua. 31.2. Punti di equilibrio 51.3. I teoremi di stabilita di Liapounov 61.4. Il caso dei sistemi di secondo ordine 91.5. Rappresentazioni nel piano delle fasi 11
Parte 2. Come descrivere il moto 15
Capitolo 2. Cambiamento di sistemi di riferimento 172.1. Cambiamenti di base dipendenti dal tempo 172.2. Cinematica relativa 202.3. Passaggi da una base mobile all’altra 222.4. Ricostruzione di una terna mobile a partire dalla velocita
angolare 242.5. L’asse istantaneo di moto 25
Capitolo 3. Curve nello spazio 293.1. Il triedro principale 293.2. Le formule di Frenet–Serret 303.3. Il triedro principale come terna di riferimento mobile 313.4. Scomposizione di velocita e accelerazione 34
Capitolo 4. Corpi rigidi 354.1. Sistemi rigidi 354.2. Quantita meccaniche nei rigidi 414.3. Il tensore d’inerzia 434.4. Scomposizione del tensore d’inerzia. Assi principali. 454.5. Ricerca degli assi principali 51
Capitolo 5. Vincoli. Coordinate lagrangiane 555.1. Coordinate locali canoniche per un corpo rigido non degenere 555.2. Coordinate locali canoniche per un corpo rigido degenere 575.3. Vincoli olonomi 585.4. Coordinate lagrangiane 605.5. Sistemi vincolati a un piano 62
Parte 3. Come determinare il moto 65
v

vi DANIELE ANDREUCCI
Capitolo 6. Quantita meccaniche in coordinate lagrangiane 676.1. Cinematica 676.2. Distribuzioni di masse 696.3. Distribuzioni di forze 696.4. L’ipotesi dei lavori virtuali 716.5. Forze conservative 75
Capitolo 7. Equazioni di Lagrange 797.1. Le equazioni di Lagrange 797.2. Proprieta dell’energia cinetica 807.3. Condizioni iniziali 837.4. Il caso conservativo. La funzione lagrangiana 847.5. Piccole oscillazioni 867.6. Funzioni lagrangiane diverse che conducono alle stesse equazioni
di Lagrange 89
Capitolo 8. Moti di precessione 938.1. La seconda equazione cardinale 938.2. Le equazioni di Eulero 958.3. Le precessioni per inerzia 958.4. Precessioni con attrito 100
Capitolo 9. Applicazioni delle equazioni di Lagrange 1039.1. Moti in campi centrali 1039.2. Sistemi di riferimento mobili. Le forze fittizie. 106
Parte 4. Appendici 111
Appendice A. Algebra lineare 113A.1. Prodotti tra vettori 113A.2. Cambiamenti di base 114A.3. Angoli e perpendicolarita 117A.4. Forme quadratiche 118
Appendice B. Complementi 121B.1. Due punti nel piano 121B.2. Le equazioni delle poloidi 123
Appendice C. Simboli e notazione usati nel testo 129C.1. Simboli usati nel testo 129

Parte 1
Cenni alla stabilita dell’equilibrio


CAPITOLO 1
Equazioni differenziali
1.1. Esistenza, unicita e dipendenza continua.
Consideriamo un sistema di equazioni differenziali ordinarie (e.d.o.)
y = F (y, t) , (1.1)
ove Ω e un aperto di RN , I e un intervallo aperto di R,
F ∈ C(Ω × I) . (1.2)
Supporremo sempre che valga la condizione di Lipschitz
|F (y1, t) − F (y2, t)| ≤ CK |y1 − y2| , (1.3)
per ogni scelta di (yi, t) ∈ K × I, per una costante fissata CK > 0, per ogniK ⊂ Ω arbitrario insieme compatto.In particolare considereremo il problema di Cauchy per (1.1):
y = F (y, t) , (1.4)
y(t0) = y0 . (1.5)
Ricordiamo la definizione di soluzione di (1.4)–(1.5).
Definizione 1.1. Una funzione
ϕ : J → RN , t0 ∈ J ⊂ I , ϕ(J) ⊂ Ω , ϕ ∈ C1(J) , (1.6)
ove J e un intervallo, si dice soluzione di (1.4)–(1.5) se valgono
ϕ(t) = F (ϕ(t), t) , t ∈ J , (1.7)
ϕ(t0) = y0 . (1.8)
Definizione 1.2. Una soluzione di (1.4)–(1.5), definita su un intervalloJ , si dice massimale se ogni altra soluzione di (1.4)–(1.5) ha intervallo didefinizione contenuto in J .
1.1.1. Riduzione di un sistema del secondo ordine al primo. Con-sidereremo anche sistemi del secondo ordine
z = f(z, z, t) , (1.9)
e i relativi problemi ai valori iniziali
z = f(z, z, t) , (1.10)
z(t0) = z0 , (1.11)
z(t0) = z0 . (1.12)
3

4 DANIELE ANDREUCCI
In molti casi sara possibile limitarsi a trattare in modo esplicito solo il casodel sistema del primo ordine, perche il sistema del secondo ordine si riducea quello del primo con il cambiamento di variabili
y := (z, z) ∈ R2N , (1.13)
e introducendo la nuova funzione costitutiva
F (y, t) :=(y2,f(y1,y2, t)
), (1.14)
ove si denotay = (y1,y2) , y1 ,y2 ∈ RN . (1.15)
In questo modo il problema (1.10)–(1.12) si riduce a
y = F (y, t) , (1.16)
y(t0) = (z0, z0) . (1.17)
Nel seguito, le definizioni si intendono estese a sistemi del secondo ordine inquanto si applicano ai sistemi del primo ordine cui essi si riducono con latrasformazione (1.13), (1.14).
Definizione 1.3. Si dice che la soluzione di (1.4)–(1.5) dipende con conti-nuita dai dati iniziali se, fissati ad arbitrio un intervallo limitato (α, β) ovela soluzione ϕ e definita, e un ε > 0, esiste un δ > 0 tale che se |y0− y0| < δe |t0 − t0| < δ, allora la soluzione ϕ di
˙ϕ = F (ϕ, t) , ϕ(t0) = y0 , (1.18)
e definita almeno in (α+ ε, β − ε) e soddisfa
|ϕ(t) − ϕ(t)| < ε , α+ ε < t < β − ε . (1.19)
Teorema 1.4. Sotto le ipotesi (1.2), (1.3), il problema (1.4)–(1.5) ha unaunica soluzione massimale ϕ.Tale soluzione dipende con continuita dai dati iniziali.
Esercizio 1.5. Dimostrare che se si ammettesse la scelta di un intervallo(α, β) illimitato nella Definizione 1.3, allora la soluzione di
y = y ,
y(t0) = y0 ,
non soddisferebbe questa nuova Definizione.
Definizione 1.6. Il sistema (1.1) si dice autonomo se F non dipende dat.
Osservazione 1.7. Il valore di t0, nella formulazione del problema ai va-lori iniziali (1.4)–(1.5), e in sostanza ininfluente, se il sistema e autonomo.Infatti, la soluzione ϕ di
˙ϕ = F (ϕ) , ϕ(t0) = y0 (1.20)
e data daϕ(t) = ϕ(t− t0 + t0) , t ∈ J − t0 + t0 ,
ove ϕ e la soluzione di (1.4)–(1.5).

1.2. PUNTI DI EQUILIBRIO 5
Osservazione 1.8. In particolare, se la soluzione ϕ del problema ai valoriiniziali (1.4)–(1.5), che supponiamo autonomo, soddisfa per un T > 0
ϕ(T + t0) = ϕ(t0) ,
segue dall’Osservazione 1.7, e dall’unicita di soluzioni, che
ϕ(T + t) = ϕ(t) , t ∈ R ,
ossia che ϕ e periodica con periodo T .
Esercizio 1.9. Dimostrare che se N = 1 e l’equazione differenziale e auto-noma e del primo ordine, le uniche soluzioni periodiche sono quelle costan-ti.
1.2. Punti di equilibrio
Definizione 1.10. Un punto yeq ∈ Ω si dice di equilibrio per il sistemaautonomo
y = F (y) , (1.21)
se e solo seF (yeq) = 0 . (1.22)
Osservazione 1.11. La Definizione 1.10 e motivata dal fatto che, se yeq edi equilibrio, il problema di Cauchy (1.21), (1.5) ha come soluzione quellacostante
ϕ(t) = yeq , t ∈ R . (1.23)
Questa soluzione e l’unica (massimale) sotto le ipotesi del Teorema 1.4.
Lemma 1.12. Se ϕ e una soluzione del sistema autonomo (1.21), definitasu (α, β), e
limt→β−
ϕ(t) = yeq , ϕ(t) 6= yeq per qualche t, (1.24)
allora β = ∞.
Dimostrazione. Se per assurdo fosse β < ∞, potremmo definire la fun-zione
ϕ(t) =
ϕ(t) , α < t < β ,
yeq , β ≤ t <∞ .
E facile verificare che ϕ e una soluzione di classe C1((α,∞)) del problema
y = F (y) , y(β) = yeq ,
mentre per il teorema di unicita di soluzioni, l’unica soluzione deve esserequella costante.
Definizione 1.13. Il punto di equilibrio yeq si dice stabile se:per ogni ε > 0 esiste un δ > 0 tale che, se
|y0 − yeq| < δ ,
allora l’unica soluzione massimale di (1.21), (1.5), risulta definita (almeno)su [t0,∞), e soddisfa
∣∣ϕ(t) − yeq
∣∣ < ε , t0 < t <∞ . (1.25)
Altrimenti, il punto di equilibrio si dice instabile.

6 DANIELE ANDREUCCI
Definizione 1.14. Un punto di equilibrio si dice asintoticamente stabile see stabile, e se inoltre esiste un σ > 0 tale che se |y0 − yeq| < σ allora lasoluzione di (1.21), (1.5) soddisfa
limt→∞
ϕ(t) = yeq . (1.26)
Osservazione 1.15. La definizione di equilibrio asintotico richiede quindiche la soluzione ϕ si avvicini per tempi grandi al punto di equilibrio; questoesclude che il moto possa essere periodico. L’equilibrio asintotico e spessocollegato a fenomeni dissipativi come l’attrito.
Un collegamento interessante tra equilibrio stabile ed equilibrio asintotico edato dal seguente risultato.
Proposizione 1.16. Sia yeq un punto di equilibrio stabile, e sia ϕ unasoluzione di (1.21) che abbia yeq come punto di accumulazione, ossia taleche
ϕ(tn) → yeq , n→ ∞ , (1.27)
per una successione tn → ∞. Allora tutta la soluzione converge a yeq, ossia
limt→∞
ϕ(t) = yeq . (1.28)
Dimostrazione. Dobbiamo dimostrare che per ogni ε > 0 esiste un t taleche ∣∣ϕ(t) − yeq
∣∣ ≤ ε , t ≥ t .
Basta scegliere, per la Definizione 1.13, t = tn, con n scelto in modo che∣∣ϕ(tn) − yeq
∣∣ < δ ,
ove δ > 0 e appunto scelto in corrispondenza di ε in modo che valga la(1.25).
1.3. I teoremi di stabilita di Liapounov
Consideriamo in questa Sezione il sistema
y = F (y) , F (yeq) = 0 . (1.29)
Definizione 1.17. Una funzione W a valori reali si dice funzione di Liapou-nov per (1.29) in yeq, se valgono, per una sfera aperta B ⊂ RN di centroyeq:
(1) W ∈ C(B) ∩ C1(B \ yeq);(2) W (y) > 0 per y ∈ B \ yeq; W (yeq) = 0;(3) ∇W (y) · F (y) ≤ 0 per y ∈ B \ yeq.
Osservazione 1.18. In sostanza quindi la funzione di Liapounov e unafunzione con un minimo isolato in yeq, e che non cresce lungo le soluzioni ϕdel sistema autonomo:
d
dtW
(ϕ(t)
)= ∇W
(ϕ(t)
)· F
(ϕ(t)
)≤ 0 . (1.30)

1.3. I TEOREMI DI STABILITA DI LIAPOUNOV 7
La (1.30) e la conseguenza della terza proprieta nella Definizione 1.17 cheviene davvero usata, e che potrebbe percio sostituirla nella definizione stessa.
Teorema 1.19. Se il sistema (1.29) ammette una funzione di Liapounov inyeq, allora yeq e un punto di equilibrio stabile.
Dimostrazione. Fissiamo ε > 0; possiamo supporre che
Bε(yeq) ⊂ B . (1.31)
Dobbiamo dimostrare che esiste un δ > 0 che soddisfi la Definizione 1.13.Definiamo
m = min∂Bε(yeq)
W > 0 .
Per la continuita di W in yeq, possiamo trovare un δ > 0 tale che
0 ≤W (y) ≤ m
2,
∣∣y − yeq
∣∣ ≤ δ .
Questo e il δ che soddisfa la (1.13): se |y0 − yeq| < δ, deve valere∣∣ϕ(t) − yeq
∣∣ < ε , t > t0 .
Infatti se invece fosse per qualche t > t0∣∣ϕ(t) − yeq
∣∣ = ε ,
per definizione di m, e per l’Osservazione 1.18 si avrebbe
m ≤W(ϕ(t)
)≤W
(ϕ(t0)
)= W (y0) ≤
m
2,
assurdo.
Teorema 1.20. Se il sistema (1.29) ammette una funzione di Liapounov inyeq, e se inoltre
∇W (y) · F (y) < 0 , y ∈ B \ yeq , (1.32)
allora yeq e un punto di equilibrio asintoticamente stabile.
Dimostrazione. La stabilita di yeq segue dal Teorema 1.19.Dimostriamo che vale anche la (1.26), per σ = δ, con δ scelto come nelladefinizione di stabilita, in corrispondenza di un ε > 0 qualunque tale chevalga la (1.31). Sia dunque ϕ una soluzione che soddisfa
∣∣ϕ(t0) − yeq
∣∣ < σ .
Dobbiamo dimostrare che
limt→∞
ϕ(t) = yeq . (1.33)
Se vale ϕ(tn) → yeq per una successione tn → ∞, allora per la Proposizio-ne 1.16, vale anche la (1.33).Nel caso contrario, la curva ϕ(t), per t ≥ t0, sarebbe separata da yeq dauna distanza positiva η, cioe
ϕ(t) ∈ K := Bε(yeq) \Bη(yeq) , t ≥ t0 . (1.34)

8 DANIELE ANDREUCCI
Poiche K e un compatto, e la funzione ∇W · F e continua in K, ammette-rebbe un massimo
maxy∈K
∇W (y) · F (y) = −γ < 0 ,
per la (1.32). Dunque si avrebbe per ogni t > t0
W(ϕ(t)
)−W
(ϕ(t0)
)=
t∫
t0
dW(ϕ(τ)
)
dτdτ
=
t∫
t0
∇W(ϕ(t0)
)· F (ϕ(t0)
)dτ ≤ −γ(t− t0) → −∞ ,
per t→ ∞. Questo conduce all’assurdo ricercato e conclude la dimostrazio-ne.
Il risultato seguente, di dimostrazione meno immediata, garantisce perol’asintotica stabilita sotto ipotesi piu generali di quelle del Teorema 1.20.
Teorema 1.21. Assumiamo che il sistema (1.29) ammetta una funzione diLiapounov W in yeq, che sia strettamente decrescente su tutte le soluzionicontenute in B, diverse dalla costante yeq; ossia assumiamo che per ϕ 6= yeq
W(ϕ(t1)
)> W
(ϕ(t2)
), per ogni t1 < t2. (1.35)
Allora yeq e un punto di equilibrio asintoticamente stabile.
Dimostrazione. Intanto si possono svolgere le medesime considerazionigia viste all’inizio della Dimostrazione del Teorema 1.20, fino alla (1.34).Dimostreremo che la (1.34) conduce a un assurdo. Infatti, in questo caso lacurva ϕ(t) ha un punto di accumulazione y, con
η ≤∣∣y − yeq
∣∣ ≤ ε .
Sia tn una successione tale che ϕ(tn) → y. Per il Teorema 1.4 di dipendenzacontinua dai dati iniziali, la successione di funzioni ϕ(· + tn) converge allasoluzione ϕ di
y = F (y) , y(0) = y ,
su un intervallo opportuno [0, s]. Si noti che, per l’ipotesi che W sia stret-tamente decrescente sulle soluzioni,
W(ϕ(s)
)< W
(ϕ(0)
)= W (y) . (1.36)
In particolare quindi, per n opportuno e fissato, e per ogni t > s + tn, siavra anche, per continuita, e di nuovo per l’ipotesi di stretta monotonia,
W(ϕ(t)
)< W
(ϕ(s+ tn)
)< W (y) , (1.37)
e quindi
W (y) = limn→∞
W(ϕ(tn)
)≤W
(ϕ(s + tn)
)< W (y) ,
assurdo.

1.4. IL CASO DEI SISTEMI DI SECONDO ORDINE 9
1.4. Il caso dei sistemi di secondo ordine
Consideriamo in questa Sezione un sistema del secondo ordine, come nellaSottosezione 1.1.1, pero autonomo:
z = f(z, z) , (1.38)
z(t0) = z0 , (1.39)
z(t0) = z0 . (1.40)
Come gia mostrato, mediante la trasformazione di variabili
y = (y1,y2) := (z, z) ∈ R2N , (1.41)
questo problema puo essere trasformato nel problema del primo ordine
y = F (y) :=(y2,f(y1,y2)
), (1.42)
y(t0) = (z0, z0) . (1.43)
Quindi un punto di equilibrio zeq ∈ RN per (1.38) corrisponde al pun-
to (zeq, 0) ∈ R2N di equilibrio per (1.42). Riportiamo per convenienzale definizioni di equilibrio stabile e asintoticamente stabile tradotte nellaterminologia dei sistemi del secondo ordine.
Definizione 1.22. Il punto di equilibrio zeq si dice stabile se:per ogni ε > 0 esiste un δ > 0 tale che, se
|z0 − zeq| + |z0| < δ , (1.44)
allora l’unica soluzione massimale ψ di (1.38)–(1.40), risulta definita (alme-no) su [t0,∞), e soddisfa
|ψ(t) − zeq| + |ψ(t)| < ε , t0 < t <∞ . (1.45)
Altrimenti, il punto di equilibrio si dice instabile.
Definizione 1.23. Un punto di equilibrio si dice asintoticamente stabile see stabile, e se inoltre esiste un σ > 0 tale che se
|z0 − zeq| + |z0| < σ , (1.46)
allora la soluzione ψ di (1.38)–(1.40) soddisfa
limt→∞
ψ(t) = zeq , limt→∞
ψ(t) = 0 . (1.47)
Teorema 1.24. Supponiamo che f non dipenda da z, e che per y1 ∈ Ω1 ⊂RN aperto,
f(y1) = ∇U(y1) , (1.48)
ove U ∈ C1(Ω1). Supponiamo anche che U abbia un massimo isolato inzeq ∈ Ω1. Allora zeq e un punto di equilibrio stabile per (1.38).
Dimostrazione. E chiaro che zeq e un punto di equilibrio, perche
f(zeq) = ∇U(zeq) = 0 .
Dimostriamo poi che
W (y1,y2) = −U(y1) + U(zeq) +1
2y2
2 , (1.49)

10 DANIELE ANDREUCCI
e una funzione di Liapounov in zeq. Le richieste di regolarita e positivitasono soddisfatte per y1 ∈ B ⊂ Ω1, B sfera opportuna, per le ipotesi su U :
W (y1,y2) ≥1
2y2
2 > 0 , y2 6= 0 ,
W (y1,y2) ≥ −U(y1) + U(zeq) > 0 , y1 6= zeq .
Infine
∇W (y) · F (y) = −∇U(y1) · y2 + y2 · f(y1) = 0 ,
per l’ipotesi (1.48).
Teorema 1.25. Supponiamo che per (y1,y2) ∈ Ω1 ×Ω2 ⊂ R2N aperto,
f(y1,y2) = ∇U(y1) + a(y2) , (1.50)
ove U ∈ C1(Ω1), a ∈ C1(Ω2). Supponiamo anche che U abbia un unicopunto critico zeq ∈ Ω1, e che esso sia un massimo isolato. Inoltre sia0 ∈ Ω2, e valga
a(y2) · y2 < 0 , y2 6= 0 . (1.51)
Allora zeq e un punto di equilibrio asintoticamente stabile per (1.38).
Dimostrazione. Il punto zeq e l’unico punto di equilibrio in Ω1; infatti da(1.51) segue subito che
a(0) = 0 .
Per il Teorema 1.21, bastera dimostrare che la funzione W definita in (1.49)e una funzione di Liapounov, strettamente decrescente sulle soluzioni diversedall’equilibrio.La regolarita e positivita della W si dimostrano come nel Teorema 1.24.Inoltre
d
dtW
(ψ(t), ψ(t)
)= −∇U
(ψ(t)
)· ψ(t) + ψ(t) · ψ(t)
= ψ(t) · a(ψ(t)
)< 0 ,
(1.52)
ove nell’ultima disuguaglianza abbiamo assunto ψ(t) 6= 0.Dunque, per t1 < t2 possiamo scrivere
W(ψ(t2), ψ(t2)
)−W
(ψ(t1), ψ(t1)
)=
t2∫
t1
ψ(t) · a(ψ(t)
)dt .
Pertanto, se nell’intervallo [t1, t2] esiste almeno un t tale che ψ(t) 6= 0, la
(1.35) resta dimostrata. Se viceversa, su tale intervallo la ψ(t) si annullaidenticamente, questo implica che per t1 < t < t2
ψ(t) = z , ψ(t) = f(z, 0) = 0 .
Questo pero implica che z = zeq, ossia che l’unica soluzione su cui W non estrettamente decrescente e l’unico equilibrio.Abbiamo verificato quindi tutte le ipotesi del Teorema 1.21, e ne seguel’asintotica stabilita.

1.5. RAPPRESENTAZIONI NEL PIANO DELLE FASI 11
1.5. Rappresentazioni nel piano delle fasi
La curva
ϕ(t) | t ∈ J ⊂ RN ,
ove ϕ e una soluzione massimale di (1.4) definita nell’intervallo J , si diceorbita del sistema differenziale.Noi saremo interessati soprattutto al caso dei sistemi differenziali autonomi
y = F (y) . (1.53)
Teorema 1.26. Se un’orbita del sistema autonomo (1.53) si autointerseca,cioe se
ϕ(t1) = ϕ(t2)
per due diversi istanti t1, t2 ∈ J , allora corrisponde a una soluzione perio-dica.
Dimostrazione. Basta prendere nell’Osservazione 1.8
t0 = t1 , T = t2 − t1 ,
se per esempio t2 > t1.
Teorema 1.27. Se due orbite del sistema autonomo (1.53) si intersecano,allora coincidono.
Dimostrazione. Siano ϕ1 e ϕ2 le due soluzioni corrispondenti alle dueorbite γ1 e γ2 che si intersecano nel punto
ϕ1(t1) = ϕ2(t2) .
Per l’Osservazione 1.7, le due funzioni
t 7→ ϕ1(t) , t 7→ ϕ2(t+ t2 − t1) ,
sono soluzioni dello stesso problema di Cauchy, con istante iniziale t1 e datoiniziale ϕ1(t1). Dunque, per il teorema di unicita di soluzioni si ha
ϕ1(t) = ϕ2(t+ t2 − t1) ,
per ogni t nell’intervallo di definizione di ϕ1. Quindi γ1 ⊂ γ2.Ragionando in modo simmetrico si conclude γ2 ⊂ γ1 e si conclude la dimo-strazione.
Esercizio 1.28. Dare esempi di orbite in dimensione N = 1.
Esercizio 1.29. Dimostrare con controesempi espliciti che i Teoremi 1.26 e1.27 non valgono per i sistemi non autonomi.
Nel caso di sistemi differenziali con due incognite scalari, ossia nel caso incui N = 2 nella notazione precedente, l’orbita e una curva piana.In questo caso si ricade partendo da un’equazione autonoma del secondoordine
mx = F (x) , (1.54)
e riconducendola a un sistema del primo ordine, come nella Sottosezio-ne 1.1.1. In questo contesto, e tradizionale indicare le coordinate cartesianenel piano in cui si tracciano le orbite con (x, p), con p che corrisponde a x.

12 DANIELE ANDREUCCI
In particolare, definiamo il potenziale
U(x) =
x∫
x0
F (s) ds ,
ove x0 e fissato ad arbitrio nel dominio della F .
Proposizione 1.30. Se ϕ e una soluzione di (1.54), la funzione
E(t) := −U(ϕ(t)
)+
1
2mϕ(t)2 (1.55)
si mantiene costante nell’intervallo di definizione di ϕ.
La E si dice energia.
Dimostrazione. Deriviamo in t
E(t) = −U ′(ϕ(t)
)ϕ(t) +mϕ(t)ϕ(t) = ϕ(t)
[mϕ(t) − F
(ϕ(t)
)]= 0 .
Per la Proposizione 1.30, sulle orbite di (1.54) deve valere
− U(x) +1
2mp2 = E , (1.56)
ove E indica il valore costante assunto da E sull’orbita in questione. Si notiche tale valore varia al variare dell’orbita. Risolvendo la (1.56) in p si ottiene
p = ±√
2
m
[E + U(x)
]. (1.57)
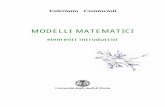
u u
−2π −π π 2π
x
p
Figura 1.1. Le orbite di 2x = − sinx. Sono disegnate leorbite corrispondenti a E = 0.5, E = 1, E = 2, e i punti diequilibrio stabili e instabili.
L’ambiguita di segno nella (1.57) merita una discussione. Sia dunque (x0, p0)un punto del piano per cui passa un’orbita γ. Questa e unica per il Teore-ma 1.27. Si hanno i casi seguenti:

1.5. RAPPRESENTAZIONI NEL PIANO DELLE FASI 13
• p0 > 0: in questo caso γ e contenuta, almeno in un intorno di (x0, p0)nel semipiano p > 0, e quindi nella (1.57) va preso il segno positivo,almeno in questo intorno. Tale scelta va mantenuta nell’intervallo oveil termine all’interno della radice in (1.57) si mantiene positivo.
• p0 < 0: caso simmetrico del precedente: qui va scelto il segno negativo,in tutto l’intervallo ove il termine all’interno della radice in (1.57) simantiene positivo.
• p0 = 0∗ F (x0) = 0: l’orbita corrisponde a un punto di equilibrio per il
sistema, e coincide quindi con il punto (x0, 0).∗ F (x0) 6= 0: l’orbita passa per il punto (x0, 0), ma ha un ramo inp > 0, e uno in p < 0, che si ottengono prendendo i segni opportuniin (1.57).
Osservazione 1.31. I punti di equilibrio corrispondono a orbite degeneri,cioe puntiformi, nel piano (x, p). Sia (x0, 0) una di queste. Se un’altra orbita(ϕ, ϕ) soddisfa
(ϕ(t), ϕ(t)) → (x, p) , t→ β ,
allora β = ∞, o β = −∞, per il Lemma 1.12.E chiaro che se esiste un orbita che si allontana da (x0, 0) il punto non puoessere di equilibrio stabile.
1.5.1. Tempi come integrali. Alcune proprieta cinematiche del moto so-no esprimibili in termini delle proprieta geometriche delle orbite nel pianodelle fasi. Per esempio vale il seguente risultato.
Teorema 1.32. Sia ϕ una soluzione di (1.54), tale che ϕ > 0 nell’intervallo[t1, t2]. Allora, se ϕ(ti) = xi, vale
t2 − t1 =
x2∫
x1
1√2m
[E + U(x)
] dx . (1.58)
Dimostrazione. In un intervallo di tempi in cui ϕ > 0 la funzione ϕ(t) einvertibile, ossia si puo scrivere
t = τ(x) ,
condτ
dx(x) =
1
ϕ(τ(x))=
1√2m
[E + U(x)
] .
La (1.58) segue subito integrando su (x1, x2).
Nel caso ϕ < 0 vale un risultato simmetrico a (1.58).
Esercizio 1.33. Usare il Teorema 1.32 per dimostrare che:
(1) se F (x0) = 0, il tempo che un’orbita impiega a raggiungere (x0, 0) einfinito;
(2) se F (x0) 6= 0, il tempo che un’orbita impiega a raggiungere (x0, 0) efinito.


Parte 2
Come descrivere il moto


CAPITOLO 2
Cambiamento di sistemi di riferimento
2.1. Cambiamenti di base dipendenti dal tempo
Definizione 2.1. Si dice terna (di riferimento) mobile nell’intervallo I ⊂ Runa terna M = (u1,u2,u3) con
ui : I → R3 , ui ∈ C1(I) ,
e tale che
(u1(t),u2(t),u3(t))
sia una base ortonormale in R3 per ogni fissato t ∈ I.
Sia
f : I → R3 , f ∈ C1(I) . (2.1)
Si ha
f(t) =
3∑
i=1
fi(t)ui(t) , t ∈ I , (2.2)
con
fi(t) = f(t) · ui(t) , i = 1 , 2 , 3 , t ∈ I ,
cosicche le funzioni fi sono in C1(I).
Definizione 2.2. Sia f come in (2.1)–(2.2). Si definisce derivata di frelativa a M la funzione vettoriale
[df
dt
]
M
(t) =3∑
i=1
dfi
dt(t)ui(t) , t ∈ I .
Sia g ∈ C1(I), e sia f : I → R3 come in (2.1)–(2.2). Allora[
d
dt(gf )
]
M
(t) =dg
dt(t)f (t) + g(t)
[df
dt
]
M
(t) , (2.3)
per t ∈ I. Quindi, definendo per le funzioni scalari g ∈ C1(I)[dg
dt
]
M
(t) =dg
dt(t) , t ∈ I , (2.4)
la (2.3) implica che per la derivata relativa vale l’usuale regola di Leibniz.Le proprieta di linearita rispetto alla somma e al prodotto per costanti realisono di immediata verifica.
17

18 DANIELE ANDREUCCI
Seguono[
d
dt(f 1 · f2)
]
M
=
[df1
dt
]
M
· f2 + f1 ·[df2
dt
]
M
,
[d
dt(f1 ∧ f2)
]
M
=
[df1
dt
]
M
∧ f2 + f1 ∧[df2
dt
]
M
.
Teorema 2.3. Esiste una unica funzione vettoriale
ω : I → R3 , ω ∈ C(I) , (2.5)
tale che per ogni f ∈ C1(I), f : I → R3, valga
df
dt(t) =
[df
dt
]
M
(t) + ω(t) ∧ f(t) , t ∈ I . (2.6)
Per dimostrare questo teorema useremo il seguente lemma, che e in realtaun caso particolare del teorema stesso.
Lemma 2.4. Esiste una unica funzione vettoriale
ω : I → R3 , ω ∈ C(I) ,
tale che per i = 1, 2, 3,
dui
dt(t) = ω(t) ∧ ui(t) , t ∈ I . (2.7)
Dimostrazione. Supponiamo che ω con le proprieta richieste esista, edenotiamola come
ω(t) =
3∑
i=1
ωi(t)ui(t) . (2.8)
Imponiamo ora che valga la (2.7) per i = 1:
du1
dt(t) = ω3(t)u2(t) − ω2(t)u3(t) ,
da cui
ω2(t) = −du1
dt(t) · u3(t) =
du3
dt(t) · u1(t) , (2.9)
ω3(t) =du1
dt(t) · u2(t) = −du2
dt(t) · u1(t) . (2.10)
Resta da determinare ω1. Imponiamo dunque la (2.7) per i = 2:
du2
dt(t) = −ω3(t)u1(t) + ω1(t)u3(t) ,
che permette di ottenere
ω1(t) =du2
dt(t) · u3(t) = −du3
dt(t) · u2(t) , (2.11)
oltre che di ritrovare la (2.10).Quindi, se ω con le proprieta richieste esiste, deve avere la forma (2.8) conle componenti ωi individuate dalle (2.9)–(2.11). Questo dimostra l’unicita.Per dimostrare l’esistenza, basta verificare che ω cosı definita soddisfa la(2.7): un calcolo elementare che si riduce in sostanza ai passaggi gia svolti.

2.1. CAMBIAMENTI DI BASE DIPENDENTI DAL TEMPO 19
Dimostrazione del Teorema 2.3. Sia f come nell’enunciato, e ω comenel Lemma 2.4. Allora
df
dt(t) =
d
dt
3∑
i=1
fi(t)ui(t) =3∑
i=1
dfi
dt(t)ui(t) + fi(t)
dui
dt(t)
=
[df
dt
]
M
(t) +3∑
i=1
fi(t)ω(t) ∧ ui(t)
=
[df
dt
]
M
(t) + ω(t) ∧3∑
i=1
fi(t)ui(t) =
[df
dt
]
M
(t) + ω(t) ∧ f(t) .
Percio la (2.6) e soddisfatta.Infine la funzione ω e unica, perche se vale la (2.6), allora vale anche la (2.7),e si puo quindi applicare il risultato di unicita del Lemma 2.4.
Definizione 2.5. La funzione ω tale che valga la (2.6) si dice velocitaangolare di M.
Osservazione 2.6. Segue subito dalle (2.9)–(2.11) che se ui ∈ Ck(I), i = 1,2, 3, ove k ∈N , k ≥ 2, allora ω ∈ Ck−1(I). In particolare, in questa ipotesi,vale per ogni t ∈ I,
dω
dt(t) =
[dω
dt
]
M
(t) + ω(t) ∧ ω(t) =
[dω
dt
]
M
(t) . (2.12)
Lo stesso ragionamento mostra che ω ha direzione costante nel sistema fissose e solo se ha direzione costante in S.
Esempio 2.7. (Rotazione) Nel caso in cui
u1(t) = cos θ(t)e1 + sin θ(t)e2 ,
u2(t) = − sin θ(t)e1 + cos θ(t)e2 ,
u3(t) = e3 ,
con θ ∈ C1(I), si ha applicando le (2.9)–(2.11) che
ω(t) = θ(t)u3(t) = θ(t)e3 . (2.13)
Definizione 2.8. Una funzione vettoriale f : I → R3 si dice solidale conM se esistono tre costanti λi ∈ R, i = 1, 2, 3, tali che
f(t) =
3∑
i=1
λiui(t) , t ∈ I .
Corollario 2.9. Sia f ∈ C1(I). Allora f e solidale con M se e solo se
df
dt(t) = ω(t) ∧ f(t) , t ∈ I , (2.14)
ossia se e solo se [df
dt
]
M
(t) = 0 , t ∈ I . (2.15)
Dimostrazione. Ovvia.

20 DANIELE ANDREUCCI
2.2. Cinematica relativa
Definizione 2.10. Un sistema di riferimento mobile e una coppia
S = (XO,M) , (2.16)
ove XO e un moto, ed M una terna mobile.
Noi interpretiamo la coppia (XO,M) come un sistema cartesiano di riferi-mento mobile: il moto XO e quello dell’origine O(t), e la terna mobile M equella dei versori dei tre assi. Scriveremo anche S = (O,M).Nel seguito si denota
vO(t) =dXO
dt(t) , aO(t) =
d2XO
dt2(t) . (2.17)
Definizione 2.11. Sia X : I → R3 un moto. Si definisce velocita relativadi X nel sistema di riferimento mobile S (2.16) la funzione vettoriale
vS(t) =
[d
dt(X −XO)
]
M
(t) . (2.18)
Definizione 2.12. Sia X : I → R3 un moto. Si definisce accelerazionerelativa diX nel sistema di riferimento mobile S (2.16) la funzione vettoriale
aS(t) =
[d
dtvS
]
M
(t) . (2.19)
Osservazione 2.13. Se denotiamo
X(t) −XO(t) =
3∑
h=1
λh(t)uh(t) ,
risulta
vS(t) =
3∑
h=1
λh(t)uh(t) , aS(t) =
3∑
h=1
λh(t)uh(t) .
Teorema 2.14. Sia X : I → R3 un moto. Vale allora in I
v =dX
dt= vO + ω ∧ [X −XO] + vS , (2.20)
ove si e usata la notazione delle Definizioni 2.10 e 2.11.
Dimostrazione. Si ha
v =d
dt[XO +X −XO] = vO +
d
dt[X −XO]
= vO +
[d
dt(X −XO)
]
M
+ω ∧ [X −XO] = vO + vS +ω ∧ [X −XO] ,
ove si e applicato anche il Teorema 2.3.
Definizione 2.15. Il moto X : I → R3 si dice solidale con S se il vettoreX −XO e solidale con M.

2.2. CINEMATICA RELATIVA 21
Segue subito
Corollario 2.16. Sia il moto X : I → R3 solidale con S. Allora in Ivalgono vS = 0 e
v = vO + ω ∧ [X −XO] . (2.21)
Definizione 2.17. La funzione vt : I → R3
vt = vO + ω ∧ [X −XO] (2.22)
si dice velocita di trascinamento.
Con la notazione (2.22) la (2.20) si scrive come
v(t) = vt(t) + vS(t) , t ∈ I . (2.23)
Osservazione 2.18. La vt dipende solo da vO, ω e dalla posizione rela-tiva X(t) − XO(t). Per questo si puo introdurre il campo di velocita ditrascinamento come la funzione definita in R3 × I da
V t(x, t) = vO(t) + ω(t) ∧ [x−XO(t)] . (2.24)
Valevt(t) = V t(X(t), t) .
Teorema 2.19. (Coriolis) Sia X : I → R3 un moto. Vale allora in I
a =d2X
dt2= aO +
dω
dt∧ [X −XO] + ω ∧
[ω ∧ [X −XO]
]
+ 2ω ∧ vS+ aS .
(2.25)
ove si e usata la notazione delle Definizioni 2.10, 2.11 e 2.12.
Dimostrazione. Si ha per il Teorema 2.14
a =d
dt
[vO + ω ∧ [X −XO] + vS
]
= aO +dω
dt∧ [X −XO] + ω ∧ d
dt[X −XO] +
dvSdt
(per (2.6):)
= aO +dω
dt∧ [X −XO] + ω ∧ [v − vO] + aS + ω ∧ vS
(per (2.21):)
= aO +dω
dt∧ [X −XO] + ω ∧
[ω ∧ [X −XO]
]+ 2ω ∧ vS + aS .
Definizione 2.20. La funzione at : I → R3
at = aO +dω
dt∧ [X −XO] + ω ∧
[ω ∧ [X −XO]
](2.26)
si dice accelerazione di trascinamento, e la ac : I → R3
ac = 2ω ∧ vS (2.27)
si dice accelerazione di Coriolis.

22 DANIELE ANDREUCCI
Con le notazioni (2.26) e (2.27), la (2.25) si scrive
a(t) = at(t) + ac(t) + aS(t) , t ∈ I . (2.28)
Osservazione 2.21. Se un moto X e solidale, allora ac = 0, aS = 0 in I.Valgono per at considerazioni simili a quelle dell’Osservazione 2.18.
Definizione 2.22. Sia S = (XO,M) un sistema di riferimento mobile.Se esiste un moto solidale con S che e costante nel sistema di riferimentofisso, cioe se S mantiene un punto fisso, il moto di S si dice una precessione.Se ω ≡ 0, il moto di S si dice una traslazione.Se ω mantiene direzione costante, il moto di S si dice una rotazione. Seinoltre anche il modulo di ω e costante, il moto si dice una rotazione uniformeo costante.
2.3. Passaggi da una base mobile all’altra
In questa Sezione mostriamo come le formule trovate sopra per il passaggioda un sistema di riferimento fisso a un sistema di riferimento mobile in realtavalgano anche per il passaggio tra sistemi di riferimento mobili.
2.3.1. Al posto del sistema di riferimento fisso possiamo conside-
rarne uno mobile, I. Usando le proprieta della derivata relativa, possiamoripetere tutti gli argomenti della Sezione 2.1, sostituendo all’usuale derivatain t la derivata relativa a una terna mobile N = (w1,w2,w3).Indichiamo con ωNM la velocita angolare di M relativa alla terna N .Valgono allora, in particolare la
[dui
dt
]
N
(t) = ωNM(t) ∧ ui(t) , t ∈ I , (analoga di (2.7)) (2.29)
e piu in generale l’analoga di (2.6)[df
dt
]
N
(t) =
[df
dt
]
M
(t) + ωNM(t) ∧ f(t) , t ∈ I . (2.30)
In modo piu esplicito: esiste una unica funzione vettoriale ωNM tale chevalgano le (2.29), (2.30).La Definizione 2.8 e indipendente dalle considerazioni che stiamo svolgendo;il Corollario 2.9 infine continua a valere se la (2.14) viene sostituita dalla
[df
dt
]
N
(t) = ωNM(t) ∧ f(t) , t ∈ I . (2.31)
2.3.2. Al posto del sistema di riferimento fisso possiamo conside-
rarne uno mobile, II. Anche i risultati di cinematica relativa dimostratinella Sezione 2.2 possono essere estesi al caso in cui il sistema di riferimento‘di partenza’ sia mobile.Introduciamo quindi il sistema di riferimento mobile Σ = (XΩ,N ), e defi-niamo
[vO]Σ (t) =
[d
dt(XO −XΩ)
]
N
(t) , [aO]Σ (t) =
[d
dt[vO]Σ
]
N
(t) ;
(2.32)

2.3. PASSAGGI DA UNA BASE MOBILE ALL’ALTRA 23
queste non sono altro che la velocita relativa e l’accelerazione relativa diXO
in Σ, come definite nelle Definizioni 2.11 e 2.12. Si noti che le (2.17) sonoora casi particolari delle (2.32).Per un moto X : I → R3 valgono allora l’analoga di (2.20)
vΣ = [vO]Σ +ωNM ∧ [X −XO] + vS , (2.33)
e l’analoga di (2.25)
aΣ = [aO]Σ +
[dωNM
dt
]
N
∧ [X −XO] + ωNM ∧[ωNM ∧ [X −XO]
]
+ 2ωNM ∧ vS+ aS .
(2.34)
2.3.3. Inversione dei ruoli. Dalla (2.30) segue subito che
0 =
[dwi
dt
]
N
=
[dwi
dt
]
M
+ ωNM ∧wi ,
da cui [dwi
dt
]
M
= −ωNM ∧wi , i = 1 , 2 , 3 .
Ne segue per l’unicita della funzione ωMN che
ωMN = −ωNM . (2.35)
2.3.4. Composizione di velocita angolari.
Teorema 2.23. Siano M, N , P tre terne mobili, come in Definizione 2.1.Allora
ωPN = ωPM + ωMN . (2.36)
Dimostrazione. Scriviamo per M = (ui), N = (wi),
wi(t) =3∑
h=1
bih(t)uh(t) .
Allora, per ogni i = 1, 2, 3:
[dwi
dt
]
P
=
3∑
h=1
dbihdtuh + bih
[duh
dt
]
P
(per le definizioni di derivata relativa e di velocita angolare)
=
[dwi
dt
]
M
+
3∑
h=1
bihωPM ∧ uh
= ωMN ∧wi + ωPM ∧wi = (ωPM + ωMN ) ∧wi .
La tesi segue per l’unicita di ωPN nel senso del Lemma 2.4.

24 DANIELE ANDREUCCI
2.4. Ricostruzione di una terna mobile a partire dalla velocita
angolare
Teorema 2.24. Sia M = (ui) una terna mobile, come in Definizione 2.1,e sia t0 ∈ I un istante fissato. Allora, assegnato un vettore f ∈ C(I), e unabase ortonormale positiva in R3
w01 ,w
02 ,w
03 ,
esiste un’unica terna mobile N = (wi) tale che
ωMN = f , in I,(w1(t0),w2(t0),w3(t0)
)=
(w0
1,w02,w
03
). (2.37)
Dimostrazione. Definiamo la terna di vettori (wi) come la soluzione delsistema di e.d.o. [
dwi
dt
]
M
(t) = f(t) ∧wi(t) , (2.38)
con i = 1, 2, 3. Questo e un sistema di 9 e.d.o. scalari nelle 9 incognitecostituite dalle componentidei tre vettori incogniti wi nella base (ui).Dato che (2.38) e un sistema lineare a coefficienti continui in I, la soluzione
(w1(t),w2(t),w3(t)
),
risulta definita per ogni t ∈ I, ed e unica e di classe C1(I).Va dimostrato che e una base ortonormale positiva per ogni t ∈ I. Intanto,si ha per ogni coppia (i, j):
dwi ·wj
dt=
[dwi ·wj
dt
]
M
=
[dwi
dt
]
M
·wj +wi ·[dwj
dt
]
M
= f ∧wi ·wj +wi · f ∧wj = 0 ,
in tutto I, per il Lemma A.6. Dato che all’istante iniziale t0
wi(t0) ·wj(t0) = δij ,
per la scelta dei dati iniziali, segue che
wi(t) ·wj(t) = δij , per ogni t ∈ I.
Percio la soluzione (wi(t)) e una base ortonormale per ogni t ∈ I.Sia A(t), t ∈ I la matrice di cambiamento di base tra (ui(t)) e (wi(t)). LaA risulta una funzione continua su I, e percio anche il suo determinante econtinuo su I. Dato che all’istante t0 vale
detA(t0) = 1 ,
per l’ipotesi che il dato iniziale sia una base positiva, e dato che
|det A(t)| = 1 ,
per ogni t ∈ I, in quanto sappiamo gia che le due basi (ui(t)) e (wi(t)) sonoentrambe ortonormali (vedi il Teorema A.15), ne segue per continuita che
det A(t) = 1 ,
per ogni t ∈ I, e quindi (wi(t)) e positiva per ogni t ∈ I.

2.5. L’ASSE ISTANTANEO DI MOTO 25
Corollario 2.25. Siano M = (ui), t0 ∈ I, e
w01 ,w
02 ,w
03 ,
come nel Teorema 2.24. Sia invece, con maggiore generalita, f ∈ C (I×R9),e localmente lipschitziana nelle ultime nove variabili.Allora esiste un’unica terna mobile N = (wi) tale che
ωMN (t) = f(t,w1(t),w2(t),w3(t)
), t ∈ I,
(w1(t0),w2(t0),w3(t0)
)=
(w0
1,w02,w
03
).
(2.39)
Dimostrazione. Il sistema differenziale (2.38) in genere non e, quandof sia inteso dipendente anche dalle incognite wi (come facciamo nel casopresente), un sistema lineare a cui si possa applicare il teorema di esistenzaglobale per sistemi di e.d.o..Si puo tuttavia applicare il teorema di esistenza locale, e dimostrare, ragio-nando proprio come nel Teorema 2.24, l’esistenza di una soluzione massimale(wi) definita in un intervallo J ⊂ I. Notiamo in modo specifico che la (wi(t))risulta essere una terna ortonormale per ogni t ∈ J .Per dimostrare che J = I ricordiamo che si puo avere J & I solo se pert → inf J+, oppure per t → supJ−, la curva integrale si avvicina allafrontiera dell’insieme di definizione dell’equazione differenziale, insieme chenel nostro caso e I × R9, oppure diviene illimitata. La prima alternativadunque e esclusa: la frontiera e proprio
∂I ×R9 = inf I, sup I ×R9 .
La seconda alternativa risulta anche esclusa, perche il modulo della curvaintegrale si mantiene limitato per tutti i tempi di esistenza: ciascuna wi
soddisfa|wi(t)| = 1 , per ogni t ∈ J ,
come abbiamo appena stabilito.Quindi J = I e la dimostrazione e conclusa.
2.5. L’asse istantaneo di moto
Notazione. Qui S = (O,M) e un sistema di riferimento mobile, e ω : I →R3 e la corrispondente velocita angolare, che supponiamo non si annulli maiin I.Usiamo la scomposizione, per ogni f ∈ R3,
f = [f ]⊥ + [f ]‖ , (2.40)
ove [f ]⊥ denota la componente di f perpendicolare a ω, e [f ]‖ denota quella
parallela.
Teorema 2.26. Sia ω(t) 6= 0 per un fissato t ∈ I. Il luogo dei punti x ∈ R3
ove |V t(x, t)| e minimo e la retta di equazione
x = γ(t) + λω(t) , λ ∈ R , (2.41)
ove
γ(t) =XO(t) +1
|ω(t)|2ω(t) ∧ [vO(t)]⊥ .
Inoltre su tale retta V t(x, t) risulta costante e parallela a ω(t).

26 DANIELE ANDREUCCI
Dimostrazione. Si ha per definizione (vedi la (2.24))
V t(x, t) = [vO]‖ + [vO]⊥ + ω(t) ∧ [x−XO] . (2.42)
La (2.42) mette in evidenza che la componente di V t(x, t) parallela a ω(t)e indipendente da x. Quindi |V t(·, t)| sara minimo nei punti ove si annullala componente di V t(x, t) perpendicolare a ω(t), e solo in quelli, ammessoche essi esistano.Dobbiamo cioe risolvere l’equazione
[vO]⊥ + ω(t) ∧ [x−XO] = 0 , (2.43)
da cui segue
−ω(t) ∧[ω(t) ∧ [x−XO]
]= ω(t) ∧ [vO(t)]⊥ =: f .
Per il Lemma A.18,
f = |ω(t)|2 [x−XO(t)]⊥ ,
e quindi, per un λ = λ(x) ∈ R opportuno,
x = XO(t) +f
|ω(t)|2 + λω(t) . (2.44)
che e la (2.41).Viceversa, sia soddisfatta in x la (2.41), ossia la (2.44). Allora, usando ladefinizione di f e ancora il Lemma A.18 si vede che vale la (2.43), e quindiche la componente di V t(x, t) perpendicolare a ω(t) si annulla.
Definizione 2.27. La retta definita da (2.41) si dice asse istantaneo di moto.Nel caso in cui [vO(t)]‖ = 0, la retta si dice asse d’istantanea rotazione.
Introduciamo le due superfici rigate (cioe formate dall’unione di rette)
Σ =ξ ∈ R3 | x =
3∑
i=1
ξiei soddisfi (2.41) per qualche t ∈ I e λ ∈ R,
ΣSm =
ξ ∈ R3 | x =
3∑
i=1
ξiui(t) soddisfi (2.41) per qualche t ∈ I e λ ∈ R.
Definizione 2.28. La Σ [la ΣSm] si dice rigata fissa [mobile] del moto di
S.
Con un certo abuso di notazione, si chiama ancora rigata mobile la superficiemobile
Σm(t) =X(t) = XO(t) +
3∑
i=1
ξiui(t) | ξ ∈ ΣSm
.
In modo forse piu intuitivo la rigata fissa [mobile] si puo descrivere comel’unione delle posizioni dell’asse istantaneo di moto nel sistema fisso [mobile].

2.5. L’ASSE ISTANTANEO DI MOTO 27
2.5.1. Moti rigidi piani.
Definizione 2.29. Il moto di S si dice moto rigido piano se e solo se ωmantiene direzione costante, e [vO(t)]‖ = 0 per ogni t ∈ I.
Nei moti rigidi piani l’asse d’istantanea rotazione mantiene direzione co-stante, e su di esso i punti hanno velocita di trascinamento nulla; l’asse simantiene costante se e solo se il moto e una rotazione. Le rigate del motoquindi sono superfici cilindriche (ossia rigate formate da rette tutte paralleletra di loro).Per di piu, dalla (2.24) segue subito che, fissata una retta parallela a ω(t),tutti i suoi punti x hanno uguale velocita di trascinamento V t(x, t). Neimoti piani, la direzione di ω si mantiene costante, dunque per descrivere ilcampo delle velocita di trascinamento, ossia il moto di S, basta conoscerlosu un fissato piano Π ortogonale a ω.Supponiamo nel seguito per chiarezza che ω sia parallelo a e3 = u3(t) perogni t ∈ I, e indichiamo con (yi) [(zi)] le coordinate nel sistema fisso [mobile].Tutti i punti hanno velocita parallela nulla in ogni istante: dunque se i duepiani fisso y3 = c1 e mobile z3 = c2 sono sovrapposti all’istante t, sarannosovrapposti per ogni altro istante.
Definizione 2.30. Siano y3 = c1 e z3 = c2 due piani—fisso e mobile—sovrapposti come sopra. La curva intersezione di Σ con il piano y3 = c1 sidice base, e quella intersezione di ΣS con il piano z3 = c2 si dice rulletta.
Esempio 2.31. Consideriamo il moto di un sistema S con
XO(t) = v0te1 , M come nell’Esempio 2.7 con θ(t) = ωt,
ove v0 e ω sono costanti positive. Si ha ω(t) = ωu3, e dunque il moto epiano.Il campo di velocita di trascinamento quindi e dato da
V t(x, t) = [vO(t)]⊥ + ω ∧ (x−XO(t)) = (v0 − ωy2)e1 + ω(y1 − v0t)e2 .
Qui le yi denotano le coordinate nel sistema fisso. Percio l’asse d’istantanearotazione ha equazioni, nel sistema fisso,
y1 = v0t , y2 =v0ω.
La rigata fissa e percio il piano y2 = v0/ω, e la base e la curva
y2 =v0ω, y3 = 0 .
Esprimendo le coordinate zi nel sistema mobile in funzione delle yi si ottiene
z1 = (y1 − v0t) cosωt+ y2 sinωt ,
z2 = −(y1 − v0t) sinωt+ y2 cosωt ,
z3 = y3 .
Le equazioni dell’asse di moto sono dunque nel sistema mobile
z1 =v0ω
sinωt , z2 =v0ω
cosωt .

28 DANIELE ANDREUCCI
Percio la rigata mobile ΣSm e il cilindro circolare retto di centro l’origine e
raggio v0/ω:
ΣSm =
(zi) | z2
1 + z22 =
v20
ω2
.
La rulletta e la circonferenza
(y1 − v0t)2 + y2
2 =v20
ω2.
Ben poche cose di Omega sono piacevoli.
ROBERT SHECKLEY, Gli orrori di Omega

CAPITOLO 3
Curve nello spazio
3.1. Il triedro principale
Consideriamo una curva regolare γ data da
Ψ : I → R3 , Ψ ∈ C2(I) , Ψ(t) 6= 0 , per ogni t ∈ I,
ove I e un intervallo di R. Un’ascissa curvilinea su γ e data da
s(t) =
t∫
t0
|Ψ (τ)|dτ , t ∈ I ,
ove t0 ∈ I e fissato. Poiche
s(t) = |Ψ (t)| > 0 , in I,
la funzione t 7→ s(t) ha inversa t = t(s), e possiamo parametrizzare γmediante s:
ψ(s) = Ψ (t(s)) .
In particolare il vettore tangente
T (s) :=dψ
ds(s) = ψ′(s)
ha modulo unitario:
|T (s)| = |ψ′(s)| =
∣∣∣∣Ψ (t(s))dt
ds(s)
∣∣∣∣ =|Ψ(t(s))|s(t(s))
= 1 .
Definiamo la curvatura
k(s) = |T ′(s)| .Se
T ′(s) 6= 0 ,
il che per il momento assumiamo, allora
T ′(s) = k(s)N (s) ,
ove si e definito anche
N (s) =T ′(s)
|T ′(s)| . (3.1)
Il versore N prende il nome di normale principale. Si noti infatti che
T (s) · T ′(s) =1
2
d
ds|T (s)|2 = 0 .
Si introduce quindi un terzo vettore, la binormale B, come
B(s) = T (s) ∧N (s) .
29

30 DANIELE ANDREUCCI
Definizione 3.1. Il triedro principale o terna intrinseca di γ in s e la baseortonormale positiva in R3
T (s) = (T (s),N (s),B(s)) =: (h1(s),h2(s),h3(s)) .
Nei punti ove T ′(s) = 0 i vettori N (s) e B(s) non sono definiti.Ove k(s) > 0, si definisce il raggio di curvatura come
ρk(s) =1
k(s). (3.2)
3.2. Le formule di Frenet–Serret
Ipotesi 3.2. In questa Sezione assumiamo che T , N , B ∈ C1(I) (il che egarantito da Ψ ∈ C3(I)). Assumiamo inoltre che T ′(s) 6= 0, salvo esplicitaindicazione contraria.
Proposizione 3.3. (Formule di Frenet-Serret) Valgono
T ′(s) = k(s)N (s) , (3.3)
N ′(s) = − k(s)T (s) − τ(s)B(s) , (3.4)
B′(s) = τ(s)N (s) . (3.5)
Si noti che la (3.5) e la definizione della torsione τ(s).
Dimostrazione. Dato che T e una base ortonormale, deve essere
h′i(s) · hj(s) = −hi(s) · h′
j(s) , i , j = 1 , 2 , 3 , (3.6)
e in particolare
h′i(s) · hi(s) = 0 . (3.7)
La (3.5) segue allora dalla (3.3), che e nota dalla definizione di N . Infine la(3.4) segue dalle altre due formule.
I prossimi risultati illustrano il significato geometrico degli scalari curvaturae torsione.
Proposizione 3.4. Se k(s) = 0 per ogni α < s < β, la curva
ψ(s) | α < s < βe un segmento di retta.
Dimostrazione. In questo caso si ha T ′(s) = 0 in α < s < β. Dunque,fissato s0 ∈ (α, β) si ha
ψ(s) = ψ(s0) +
s∫
s0
T (σ) dσ = ψ(s0) + (s− s0)T (s0) , α < s < β ,
che prova la tesi.
Proposizione 3.5. Sia k(s) > 0 per ogni α < s < β. Allora la curva
ψ(s) | α < s < βgiace su un piano se e solo se τ(s) = 0 per ogni α < s < β.

3.3. IL TRIEDRO PRINCIPALE COME TERNA DI RIFERIMENTO MOBILE 31
Dimostrazione. A) La curva sia contenuta nel piano per ψ(s0) di normalef , ove s0 ∈ (α, β) e fissato. Allora per ogni s, s+ h ∈ (α, β) vale
ψ(s + h) −ψ(s)
h· f = 0 ,
e prendendo il limite h→ 0, si ha
T (s) · f = 0 .
Nello stesso modoT (s + h) − T (s)
h· f = 0 ,
cosı che, prendendo il limite h→ 0, si ha
N (s) · f = 0 .
Quindi T (s) e N(s) risultano ortogonali a f per ogni α < s < β, e percio
B(s) = f , α < s < β , oppure B(s) = −f , α < s < β .
Dunque B′(s) = 0, α < s < β.B) Viceversa, sia τ(s) = 0, α < s < β. Allora
B(s) = B(s0) , α < s < β ,
per un s0 ∈ (α, β) fissato. Consideriamo il piano per ψ(s0) normale a B(s0),e mostriamo che contiene la curva. Infatti
[ψ(s) −ψ(s0)
]·B(s0) =
s∫
s0
T (σ) dσ ·B(s0)
=
s∫
s0
T (σ) ·B(s0) dσ =
s∫
s0
T (σ) ·B(σ) dσ = 0 .
3.3. Il triedro principale come terna di riferimento mobile
Consideriamo T come terna di riferimento mobile, nel senso della Definizio-ne 2.1, parametrizzata dal tempo t secondo la funzione
t 7→ (T (s(t)),N (s(t)),B(s(t))) .
La velocita angolare ω di T , nel senso della Definizione 2.5 risulta essere,secondo le (2.9)–(2.11), e secondo le formule di Frenet–Serret (3.3)–(3.5),
ω(t) = s(t)[− τ(s(t))T (s(t)) + k(s(t))B(s(t))
]. (3.8)
3.3.1. Ricostruzione di una curva a partire da curvatura e torsione.
Teorema 3.6. Date due funzioni k, τ ∈ C (I), con k(s) > 0 per ogni s ∈ I,esiste una curva tale che k e τ ne sono rispettivamente curvatura e torsione.Tale curva risulta essere di classe C2(I), con T , N , B ∈ C1(I).

32 DANIELE ANDREUCCI
Dimostrazione. A) Scegliamo in (3.8)
s(t) = t , t ∈ I ,
cosicche possiamo applicare il Corollario 2.25, M coincidente con la basestandard di R3, e ω assegnata come in (3.8) con s = t. Ne segue l’esistenzadi una unica terna mobile di classe C1(I)
T (s) = (u1(s),u2(s),u3(s)),
tale che
ω(s) = −τ(s)u1(s) + k(s)u3(s) . (3.9)
B) Definiamo per integrazione la curva γ che ammetta tale terna come ternaintrinseca: fissato s0 ∈ I poniamo
ψ(s) =
s∫
s0
u1(z) dz , s ∈ I . (3.10)
Resta da mostrare che T e in effetti terna intrinseca per γ. E chiaro che se davvero un’ascissa curvilinea su γ, poiche
|ψ′| = |u1| = 1 .
Pertanto
T (s) = ψ′(s) = u1(s) , s ∈ I . (3.11)
Per definizione di N poi si ha
N (s) =T ′(s)
|T ′(s)| =ω(s) ∧ u1(s)
|ω(s) ∧ u1(s)|=
k(s)u2(s)
|k(s)u2(s)|= u2(s) . (3.12)
Per definizione di B:
B(s) = T (s) ∧N(s) = u1(s) ∧ u2(s) = u3(s) . (3.13)
C) Infine, mostriamo che k e τ sono in effetti curvatura e torsione di γ.La (3.9), la (3.12) e la prima delle formule di Frenet-Serret (3.3) mostranoche k e la curvatura della γ. Per trovarne la torsione, osserviamo che, perla (3.9),
B′(s) = ω(s) ∧B(s) = −τ(s)T (s) ∧B(s) = τ(s)N (s) ,
il che prova che τ e la torsione di γ quando si ricordi l’ultima delle formuledi Frenet-Serret (3.5).
Teorema 3.7. Siano ψ1, ψ2 ∈ C2(I) due curve (parametrizzate dall’ascis-sa curvilinea), con uguali curvatura e torsione (e con i vettori della ternaintrinseca di classe C1(I)).Allora le due curve coincidono a meno di una rotazione e una traslazione.
Dimostrazione. Denotiamo con
Ti = (T i,N i,Bi) ,
la terna intrinseca relativa a ψi, i = 1, 2.Fissiamo s0 ∈ I. Dato che le due terne intrinseche T1(s0) e T2(s0) sono duebasi ortonormali positive, esiste una matrice di rotazione A tale che
AT 1(s0) = T 2(s0) , AN 1(s0) = N2(s0) , AB1(s0) = B2(s0) . (3.14)

3.3. IL TRIEDRO PRINCIPALE COME TERNA DI RIFERIMENTO MOBILE 33
Per di piu per le formule di Frenet-Serret,
d
ds
[AT 1(s)
]= AT ′
1(s) =k(s)[AN 1(s)
],
d
ds
[AN 1(s)
]= AN ′
1(s)= − k(s)[AT 1(s)
]− τ(s)
[AB1(s)
],
d
ds
[AB1(s)
]= AB′
1(s)=τ(s)[AN1(s)
].
(3.15)
Dunque le due funzioni vettoriali
(T 2,N 2,B2) (AT 1,AN 1,AB1) ,
risolvono il medesimo problema di Cauchy (3.14)–(3.15), e devono quindicoincidere.In particolare
ψ2(s) −ψ2(s0) =
s∫
s0
ψ′2(z) dz =
s∫
s0
Aψ′1(z) dz
= A
s∫
s0
ψ′1(z) dz = A
(ψ1(s) −ψ1(s0)
),
e infine, per ogni s ∈ I,ψ2(s) = Aψ1(s) +
(ψ2(s0) − Aψ1(s0)
).
Osservazione 3.8. Un’applicazione delle definizioni della Sezione 3.2 mostra che assumerela curva in C2(I) non e in genere sufficiente a garantire che i versori del triedro principalesiano di classe C1(I).Invece, il Teorema 3.6 garantisce l’esistenza di una curva di classe C2(I), con curvature etorsione assegnate, che pero ha i versori del triedro principale di classe C1(I).Costruiamo qui un esempio esplicito di una curva come questa. Consideriamo
Ψ (t) =“
t,t2
2+
|t|3
6, 0
”
, t ∈ R .
Si hadΨ
dt=
“
1, t +t|t|
2, 0
”
, −∞ < t < ∞ ,
da cui si ricava per l’ascissa curvilinea s
s = σ(t) =
tZ
0
r
1 +“
z +z|z|
2
”2
dz =
tZ
0
r
1 + z2 + |z|3 +z4
4dz .
Quindi σ ∈ C3(R).Invertendo la funzione σ si ottiene
t = ϑ(s) , ϑ′(s) =
1
σ(ϑ(s))=
1q
1 + ϑ(s)2 + |ϑ(s)|3 + ϑ(s)4
4
,
con ϑ ∈ C3(R). Percio la curva, parametrizzata dall’ascissa curvilinea, e data da
ψ(s) =“
ϑ(s),ϑ(s)2
2+
|ϑ(s)|3
6, 0
”
, s ∈ R , (3.16)
e
T (s) = ϑ′(s)
“
1, ϑ(s) +ϑ(s)|ϑ(s)|
2, 0
”
. (3.17)

34 DANIELE ANDREUCCI
Quindi calcoli immediati danno
N (s) = ϑ′(s)
“
− ϑ(s) −ϑ(s)|ϑ(s)|
2, 1, 0
”
, (3.18)
B(s) = (0, 0, 1) , (3.19)
ek(s) = ϑ
′(s)3(1 + |ϑ(s)|) , τ (s) = 0 , −∞ < s < ∞ . (3.20)
Da (3.16) (e da ϑ′(0) = 1 6= 0) segue che ψ ∈ C2(R) \ C3(R).Inoltre per (3.20) la curvatura e solo continua (e neppure derivabile su tutto R).D’altronde da (3.17)–(3.19) risulta che i versori T , N , B sono di classe C1(R).Per il Teorema 3.7 quindi la (3.16) da l’unica curva (a meno di rotazioni e traslazioni) cheha curvatura e torsione prescritte dalla (3.20).
Esercizio 3.9. Si consideri la curva C1((−πR, πR))
ψ(s) =
(R cos
s
R,R sin
s
R, 0) , 0 ≤ s < πR ,
(2R−R cos
s
R,R sin
s
R, 0) , − πR < s < 0 ,
se ne calcoli (ove possibile) il triedro principale, curvatura e torsione, e sispieghi perche essa non si ottiene come una delle curve la cui esistenza eimplicata dal Teorema 3.6.
3.4. Scomposizione di velocita e accelerazione
Consideriamo un moto X, vincolato alla curva ψ regolare come nella Sezio-ne 3.1. Si ha cioe
X(t) = ψ(s(t)) , t ∈ J . (3.21)
Il moto, essendo fissata percio la traiettoria
s 7→ ψ(s) , s ∈ I ,
risulta determinato dalla legge oraria
t 7→ s(t) , t ∈ J .In particolare velocita e accelerazione si ottengono come:
v(t) =dX
dt(t) = ψ′s = sT , (3.22)
a(t) =dv
dt(t) = sT + s
(T ′s
)= sT + ks2N . (3.23)
Si noti che:
• v e diretta come T ;• a ha componente nulla lungo B;• a ha componente non negativa lungo N .

CAPITOLO 4
Corpi rigidi
4.1. Sistemi rigidi
4.1.1. Corpo rigido non degenere.
Definizione 4.1. Una terna (C, ρ,S) si dice corpo rigido (non degenere) se:1) S = (XO,M) e un sistema di riferimento mobile nel senso della Defini-zione 2.10, con M = (uh).C ⊂ R3 e un sottoinsieme chiuso e limitato, detto immagine o supporto delcorpo rigido, o, per brevita, corpo rigido. I moti
X (t;λ) = XO(t) +
3∑
h=1
λhuh(t) , λ ∈ C , (4.1)
si dicono moti dei punti del corpo rigido.2) La densita ρ e una funzione integrabile e positiva
ρ : C → (0,∞) ,
con integrale strettamente positivo.3) C contiene tre punti non allineati.Il sistema di riferimento mobile S si dice sistema di riferimento solidale conil corpo rigido, e la sua velocita angolare si dice anche velocita angolare delcorpo rigido.Infine si definisce spazio delle coordinate solidali con il corpo rigido
Λ∗ = R3 ,
e le λ ∈ R3 si dicono appunto coordinate solidali.
L’integrabilita di ρ va intesa in senso opportuno, vedi l’Osservazione 4.10.
4.1.2. Asta rigida, o corpo rigido degenere rettilineo. La parte 3)della Definizione 4.1 non e soddisfatta nei casi, peraltro di notevole interesse,dell’asta rigida e del singolo punto materiale.
Definizione 4.2. Una terna (C, ρ,S0) si dice corpo rigido degenere rettili-neo, o asta rigida, se:1) S0 = (XO,u) e una coppia formata da un moto XO e da un versoremobile u.C ⊂ R e un sottoinsieme chiuso e limitato, detto immagine o supportodell’asta rigida, o, per brevita, asta rigida. I moti
X (t;λ) = XO(t) + λu(t) , λ ∈ C , (4.2)
si dicono moti dei punti dell’asta rigida.2) La densita ρ e una funzione integrabile e positiva
ρ : C → (0,∞) ,
35

36 DANIELE ANDREUCCI
con integrale strettamente positivo.3) C contiene almeno due punti distinti.Si dice velocita angolare dell’asta il vettore ω perpendicolare a u tale che
du
dt= ω ∧ u .
Infine si definisce spazio delle coordinate solidali con il corpo rigido
Λ∗ = R ,
e le λ ∈ R si dicono appunto coordinate solidali.
Osservazione 4.3. Si noti che, assegnata un’asta rigida, si possono trovareinfiniti sistemi di riferimento mobili tali che u sia per ciascuno un vettoresolidale, e che ciascuno di tali sistemi abbia una differente velocita angolare.Questi sistemi di riferimento mobile si dicono talvolta solidali con l’asta; sinoti che, in questo senso, la velocita angolare di un sistema solidale con ilrigido non e definita in modo univoco, a differenza del caso del rigido nondegenere.Lo scopo dell’introduzione di ω e quello di sopprimere la componente dirotazione lungo l’asta, che non ha senso nel caso di un corpo rigido rettilineo.Questa ‘velocita angolare minimale’ e invece definita in modo univoco (vediil Lemma 4.4).Comunque nel seguito riprenderemo a indicare con la lettera ω la velocitaangolare dell’asta.
Lemma 4.4. Assegnato un versore u ∈ C1(I), esiste un’unica funzione ω ∈C (I) tale che
ω(t) · u(t) = 0 , t ∈ I , (4.3)
edu
dt(t) = ω(t) ∧ u(t) , t ∈ I . (4.4)
Dimostrazione. Se ω come nell’enunciato esiste, deve essere, per il Lem-ma A.18,
ω = u ∧ (ω ∧ u) = u ∧ du
dt, (4.5)
che dimostra l’unicita di ω.Ancora dal Lemma A.18, e dal fatto che
u · du
dt= 0
segue che la ω definita nella (4.5) soddisfa i requisiti dell’enunciato.
Esempio 4.5. Un’asta rigida AB di lunghezza L e vincolata ad avere l’e-stremo A nell’origine O del sistema di riferimento fisso; l’estremo B descrivecon legge oraria s(t) la curva
ψ(s) =3∑
i=1
ψi(s)ei , s ∈ (α, β) ,
ove s e l’ascissa curvilinea. Troviamo la velocita angolare ω dell’asta.

4.1. SISTEMI RIGIDI 37
In questo caso XO(t) = 0 per ogni t, C = [0, L], e il versore u e dato da
u(t) =1
Lψ(s(t)) , u(t) =
s(t)
Lψ′(s(t)) .
Dunque, secondo la (4.5),
ω(t) =s(t)
L2ψ(s(t)) ∧ψ′(s(t)) .
Nel caso particolare in cui
ψ(s) = R coss
Re1 +R sin
s
Re2 + he3 ,
ove h ∈ [0, L) e fissato, e R =√L2 − h2, si ha per esempio
ω(t) =s(t)
L2
[− h cos
s(t)
Re1 − h sin
s(t)
Re2 +Re3
].
Definizione 4.6. Nei due casi del corpo rigido non degenere, e dell’astarigida, si definiscono moti solidali con il corpo rigido i moti della forma(4.1), o rispettivamente (4.2), con λ ∈ Λ∗.
Osservazione 4.7. La velocita v e l’accelerazione a di ciascuno dei motisolidali con il corpo rigido si ottengono come derivate del moto, come eovvio:
v(t;λ) =∂X
∂t(t;λ) , a(t;λ) =
∂2X
∂t2(t;λ) ,
per ciascun λ fissato.
4.1.3. Punto materiale, o corpo rigido degenere puntiforme.
Definizione 4.8. Una terna (XO, C, ρ) si dice corpo rigido degenere pun-tiforme, o punto materiale, se:1) XO e un moto, detto moto del punto materiale.C = 0 ⊂ R e detto immagine o supporto del punto materiale, o, perbrevita, punto materiale.2) La densita ρ e una funzione integrabile e positiva
ρ : C → (0,∞) ,
ossia una costante positiva.Infine si pone per convenzione uguale al vettore nullo ω = 0 la velocitaangolare del punto e si definisce
Λ∗ = 0 .
Osservazione 4.9. La definizione data sopra di punto materiale puo sem-brare (e in effetti e) artificiosa, ma e utile per introdurre un linguaggio chepermette di enunciare risultati relativi a tutti e tre i casi di corpi rigidiintrodotti, quello di corpo rigido non degenere, e i due casi degeneri. Nelseguito, se non specificato altrimenti, il termine corpo rigido, e la notazioneabbreviata (C, ρ) si riferira a uno dei tre casi precedenti.

38 DANIELE ANDREUCCI
4.1.4. Parametrizzazione dei corpi rigidi. Useremo spesso una para-metrizzazione del corpo rigido, nella forma
C = Λ(D) = λ(s) | s ∈ D ,ove D e un insieme di parametri che conserva traccia della dimensione delsistema rigido; nel seguito considereremo solo i casi seguenti:
D.1 D un insieme finito;D.2 D un intervallo chiuso di R;D.3 D un dominio compatto regolare di R2;D.4 D un dominio compatto regolare di R3.
La funzione s 7→ λ si assume soddisfare le usuali condizioni di regolarita, ein particolare la biunivocita.Si noti che il caso dell’asta rigida corrisponde a 4.D.1 o a 4.D.2 (ma nonviceversa: questi due casi possono corrispondere a corpi rigidi non degeneri).
Osservazione 4.10. L’integrabilita di ρ va intesa nel senso opportuno,associato alla dimensione di D.Per esempio, nel caso 4.D.2 la ρ deve essere integrabile nel senso degli in-tegrali di curva, nel caso 4.D.3 nel senso degli integrali di superficie, e nelcaso 4.D.4 nel senso degli integrali di volume.Infine, nel caso 4.D.1 l’integrale si riduce a una somma finita. Uniformeremocomunque sempre la simbologia come in
∫
Λ(D)
ρ(λ) dµ(λ) , (4.6)
per indicare tutti questi casi.
Osservazione 4.11. La misura di integrazione sul rigido
dµ(λ) ,
puo essere estesa anche fuori di Λ(D), su tutto lo spazio delle coordinatesolidali Λ∗, a valori nulli. Nel seguito stipuleremo sempre questa convenzio-ne, salvo diverso avviso. In questo modo integrali come (per esempio) (4.6),(4.7) o (4.16) possono essere calcolati come estesi al dominio di integrazionecostituito da
• Λ∗ = R3 nel caso del corpo rigido non degenere;• Λ∗ = R nel caso dell’asta rigida;• Λ∗ = 0 nel caso del punto (in questo caso l’integrale si riduce a un
unico addendo).
Si noti anche che, per esempio nel primo caso, il corpo rigido puo esserecostituito da un numero finito (almeno tre) di punti isolati, e l’integralepuo quindi ridursi a una somma finita, o essere costituito da una curva, el’integrale puo quindi ridursi a un integrale curvilineo.
4.1.5. Esempi. In tutti gli esempi seguenti prendiamo come intervallotemporale I = (0,∞), e denotiamo con α, β, R e L costanti positive.4.D.1) Caso D = insieme finito: tre punti a distanze fisse.Sia D = 1, 2, 3. Il sistema di riferimento solidale S = (O,M) sia dato da
XO(t) = R(cosαt, sinαt, 0) , M = (ui) ,

4.1. SISTEMI RIGIDI 39
con
u1(t) = cos βte1 + sin βte2 ,
u2(t) = − sin βte1 + cosβte2 ,
u3(t) = e3 .
Sia poi
C = λ(1), λ(2), λ(3) ,ove
λ(1) = (0, 0, 0) , λ(2) = (L, 0, L) , λ(3) = (L, 0, 0) ,
cosicche
X (t;λ(1)) = R(cosαt, sinαt, 0) ,
X (t;λ(2)) = XO(t) + L(cos βt, sin βt, 1) ,
X (t;λ(3)) = XO(t) + L(cos βt, sin βt, 0) .
4.D.2) Caso D ⊂ R: asta rigida.Sia D = [−L,L].Introduciamo il sistema di riferimento mobile dato da
XO(t) = (αt2, βt, 0) , M = (ui) ,
con
u1(t) = αν(t)t2e1 + βν(t)te2 ,
u2(t) = −βν(t)te1 + αν(t)t2e2 ,
u3(t) = e3 ,
ove
ν(t) = (α2t4 + β2t2)−12 .
Sia poi
C = λ(s) | −L ≤ s ≤ L ,ove
λ(s) = (s, 0, 0) ,
cosicche per ogni fissato s
X (t;λ(s)) −XO(t) = su1(t) .
Ossia
X (t;λ(s)) = (αt2, βt, 0) + ν(t)(αt2, βt, 0)s .
Nella notazione della Definizione 4.2 il versore u coincide quindi con u1, eil sistema rigido solidale con l’insieme dei moti
X (t; (λ1, 0, 0)) = XO(t) + λ1u1(t) , λ1 ∈ R .
4.D.3) Caso D ⊂ R2: disco, giacente su un piano coordinato solidale.Sia
D = s = (s1, s2) | s21 + s22 ≤ R2 .Il sistema di riferimento solidale S = (O,M) sia dato da
XO(t) = (0, 0, L cos αt) , M = (ui) ,

40 DANIELE ANDREUCCI
con
u1(t) = cosβt2e1 + sin βt2e3 ,
u2(t) = e2 ,
u3(t) = − sinβt2e1 + cosβt2e3 .
Sia poi
C = λ(s) | s ∈ D ,ove
λ(s) = (s1, s2, 0) ,
cosicche per ogni fissato s
X (t;λ(s)) −XO(t) = s1u1(t) + s2u2(t) ,
ossia
X (t;λ(s)) = (s1 cos βt2, s2, L cosαt+ s1 sin βt2) .
4.D.4) Caso D ⊂ R3: cilindro circolare, con asse giacente su un assecoordinato solidale.Sia
D = s = (s1, s2, s3) | s21 + s22 ≤ R2 , 0 ≤ s3 ≤ L .Il sistema di riferimento solidale S = (O,M) sia dato da
XO(t) = (0, 0,−αt) , M = (ui) ,
con
u1(t) = cos βte1 − sin βte2 ,
u2(t) = sin βte1 + cos βte2 ,
u3(t) = e3 .
Sia poi
C = λ(s) | s ∈ D ,ove
λ(s) = (s1, s2, s3) ,
cosicche per ogni fissato s
X (t;λ(s)) −XO(t) = s1u1(t) + s2u2(t) + s3u3(t) ,
ossia
X (t;λ(s)) = (s1 cos βt+ s2 sinβt,−s1 sin βt+ s2 cos βt, s3 − αt) .
Esercizio 4.12. Secondo la nostra definizione formale, un insieme di moti erigido se viene a priori identificato come associato a un sistema di riferimento(quindi detto solidale).Per decidere se un generico assegnato insieme di moti puo essere descrittocome rigido nel senso sopra, e utile saperlo descrivere in termini geometricielementari; per esempio il moto del caso 4.D.4 e quello di un cilindro chetrasla lungo il proprio asse, ruotando allo stesso tempo intorno a esso.Dare un’analoga descrizione degli altri casi.

4.2. QUANTITA MECCANICHE NEI RIGIDI 41
Esempio 4.13. Vogliamo descrivere come sistema rigido il moto di una calot-ta emisferica di raggio R, che ruota intorno all’asse fisso x3, a essa tangentenel suo polo, o vertice, O, assunto fisso anch’esso.Scegliamo O come origine del sistema di riferimento solidale, cosicche nelsistema solidale la parametrizzazione potra essere
λ1(s) = R cos s1 sin s2 ,
λ2(s) = R sin s1 sin s2 −R ,
λ3(s) = R cos s2 ,
(s1, s2) ∈ D = [0, π] × [0, π] .
Dobbiamo ora descrivere il moto della terna solidale. La nostra scelta dellaparametrizzazione solidale implica che e3 dovra appartenere al piano dellatangente a Λ(D) in O, ossia dovra essere ortogonale a u2. Scegliamo persemplicita u3 = e3.Se l’angolo descritto nella rotazione e pari ad α(t), t ≥ 0, con α(0) = 0, siavra
u1(t) = cosα(t)e1 + sinα(t)e2 ,
u2(t) = − sinα(t)e1 + cosα(t)e2 ,
u3(t) = e3 .
I moti del corpo rigido saranno allora
X (t;λ(s)) =(λ1(s) cosα(t)−λ2(s) sinα(t), λ1(s) sinα(t)+λ2(s) cosα(t), λ3(s)+x3O
),
ove (0, 0, x3O) sono le coordinate di O nel sistema di riferimento fisso.
4.2. Quantita meccaniche nei rigidi
La massa del rigido si calcola come
m =
∫
Λ(D)
ρ(λ) dµ(λ) . (4.7)
La quantita di moto e definita da
Q(t) =
∫
Λ(D)
∂X
∂t(t;λ)ρ(λ) dµ(λ) , (4.8)
e il momento delle quantita di moto (di polo P ) da
JP (t) =
∫
Λ(D)
(X (t;λ) −XP (t)
)∧ ∂X
∂t(t;λ)ρ(λ) dµ(λ) . (4.9)
L’energia cinetica e data da
T (t) =1
2
∫
Λ(D)
∣∣∣∣∂X
∂t(t;λ)
∣∣∣∣2
ρ(λ) dµ(λ) , (4.10)
e infine il moto del centro di massa da
XG(t) =1
m
∫
Λ(D)
X (t;λ)ρ(λ) dµ(λ) . (4.11)

42 DANIELE ANDREUCCI
Esempio 4.14. Troviamo l’energia cinetica di una circonferenza materialeche ruota intorno all’asse fisso a essa ortogonale, passante per il suo centro,che a sua volta si muove lungo tale asse.In questo caso D = [0, 2π], e i moti del sistema sono dati da
X (t;λ(s)) =(R cos(s+ α(t)), R sin(s+ α(t)), β(t)
). (4.12)
La densita si assume uniforme, ρ(λ(s)) = ρ0, 0 ≤ s ≤ 2π. Qui R, ρ0 sonocostanti positive, e α, β ∈ C2(R).Secondo la (4.10) (e la definizione di integrale curvilineo) si ha
T (t) =1
2
2π∫
0
∣∣∣∣∂X
∂t(t;λ(s))
∣∣∣∣2
ρ0
∣∣∣∣∂
∂sX (t;λ(s))
∣∣∣∣ ds
=1
2
2π∫
0
(R2α(t)2 + β(t)2
)ρ0R ds = π
(R2α(t)2 + β(t)2
)ρ0R . (4.13)
Esempio 4.15. Troviamo il momento delle quantita di moto della superficiemateriale
x3 = βx1x2 , 0 ≤ x21 + x2
2 ≤ R2 , (4.14)
che ruota intorno all’asse fisso x3 con moto uniforme.In questo caso D = s21 + s22 ≤ R2, e i moti del sistema sono dati da
X (t;λ(s)) =(s1 cosαt+ s2 sinαt,
− s1 sinαt+ s2 cosαt,
βs1s2).
(4.15)
La densita si assume uniforme, ρ(λ(s)) = ρ0, s ∈ D. Qui R, α, β, ρ0
sono costanti positive. Dalla definizione (4.9) si ha, prendendo P = O, oveO e l’origine comune al sistema di riferimento fisso e a quello solidale, edenotando
Xh =∂Xh
∂t, h = 1 , 2 , 3 ,

4.3. IL TENSORE D’INERZIA 43
che
JO(t) =
∫
Λ(D)
X (t;λ) ∧ ∂X
∂t(t;λ)ρ(λ) dµ(λ)
=
∫
D
− X2X3e1 + X1X3e2 + (X1X2 − X1X2)e3
× ρ0
√1 + |∇(s1,s2)X3|2 ds1 ds2
(usando qui argomenti di simmetria, e disparita dell’integrando)
= e3ρ0
∫
D
(X1X2 − X1X2)√
1 + β2(s21 + s22) ds1 ds2
= −e3ρ0α
∫
D
(s21 + s22)√
1 + β2(s21 + s22) ds1 ds2
= −ρ0α2π
3β2
(1 + β2R2)
32R2 − 2
5β2(1 + β2R2)
52 +
2
5β2
e3 .
4.3. Il tensore d’inerzia
Notazione. In questa Sezione ω e la velocita angolare del corpo rigido(C, ρ).
Definizione 4.16. L’operatore lineare σ : R3 → R3 definito da
σv = −∫
Λ(D)
(X (t;λ)−XP (t)
)∧
[(X (t;λ)−XP (t)
)∧v
]ρ(λ) dµ(λ) , (4.16)
per ogni v ∈ R3, si dice tensore d’inerzia di polo XP .
Per brevita la notazione σ non contiene riferimenti ne a t ne a XP , nono-stante il tensore d’inerzia dipenda da entrambi.
Teorema 4.17. Se JP denota il momento delle quantita di moto definitonella (4.9), si ha
JP (t) = σω(t)
+m(XG(t) −XP (t)
)∧
[dXO
dt(t) + ω(t) ∧
(XP (t) −XO(t)
)]. (4.17)
Qui O denota l’origine del sistema di riferimento solidale S.

44 DANIELE ANDREUCCI
Dimostrazione. Dalla definizione (4.9) e dalla formula per le velocita dimoti solidali (2.21) si ha:
JP (t) =
∫
Λ(D)
(X (t;λ) −XP (t)
)∧
[dXO
dt(t) + ω(t) ∧
(X (t;λ) −XO(t)
)]
× ρ(λ) dµ(λ)
=
∫
Λ(D)
(X (t;λ) −XP (t)
)∧
[ω(t) ∧
(X (t;λ) −XP (t)
)]ρ(λ) dµ(λ)
+
∫
Λ(D)
(X (t;λ) −XP (t)
)∧
[dXO
dt(t) + ω(t) ∧
(XP (t) −XO(t)
)]
× ρ(λ) dµ(λ)
= σω(t) +m(XG(t) −XP
)∧
[dXO
dt(t) + ω(t) ∧
(XP (t) −XO(t)
)].
Corollario 4.18. Se il moto XP e solidale con il rigido, allora
JP (t) = σω(t) +m(XG(t) −XP (t)
)∧ dXP
dt(t) . (4.18)
Se inoltre, in particolare,
dXP
dt(t) = 0 , (4.19)
oppure
XP (t) =XG(t) , (4.20)
allora
JP (t) = σω(t) . (4.21)
Teorema 4.19. Se T denota l’energia cinetica definita nella (4.10), e se σdenota il tensore d’inerzia di polo XO, si ha
T (t) =1
2σω(t) · ω(t)
+1
2m
∣∣∣∣dXO
dt(t)
∣∣∣∣2
+mdXO
dt(t) · ω(t) ∧
(XG(t) −XO(t)
). (4.22)

4.4. SCOMPOSIZIONE DEL TENSORE D’INERZIA. ASSI PRINCIPALI. 45
Dimostrazione. Dalla definizione (4.10) e dalla formula per le velocita dimoti solidali (2.21) si ha:
T (t) =1
2
∫
Λ(D)
∣∣∣∣∂X
∂t(t;λ)
∣∣∣∣2
ρ(λ) dµ(λ)
=1
2
∫
Λ(D)
∣∣∣∣dXO
dt(t)
∣∣∣∣2
ρ(λ) dµ(λ)
+
∫
Λ(D)
dXO
dt(t) · ω(t) ∧
(X (t;λ) −XO(t)
)ρ(λ) dµ(λ)
+1
2
∫
Λ(D)
∣∣ω(t) ∧(X (t;λ) −XO(t)
)∣∣2 ρ(λ) dµ(λ) ,
da cui la tesi, ricordando che per la (A.3) vale
ω(t) ∧(X (t;λ) −XO(t)
)· ω(t) ∧
(X (t;λ) −XO(t)
)
= −ω(t) ·(X (t;λ) −XO(t)
)∧
[(X (t;λ) −XO(t)
)∧ ω(t)
].
Corollario 4.20. SeXG(t) =XO(t) , (4.23)
allora
T (t) =1
2σω(t) · ω(t) +
1
2m
∣∣∣∣dXO
dt(t)
∣∣∣∣2
. (4.24)
Se invecedXO
dt(t) = 0 , (4.25)
allora
T (t) =1
2σω(t) · ω(t) . (4.26)
Osservazione 4.21. La (4.24) e una versione, nel caso dei corpi rigidi, delteorema di Konig, il quale asserisce che l’energia cinetica di un corpo e datadal secondo termine del membro di destra della (4.24) (‘energia cinetica delcentro di massa’), sommata all’energia cinetica relativa del corpo nel sistemadi riferimento con origine in G e assi paralleli a quelli fissi. Quest’ultima nelcaso dei rigidi si scrive appunto come il primo termine del membro di destradella (4.24).
4.4. Scomposizione del tensore d’inerzia. Assi principali.
Notazione. Qui indicheremo con O il polo per σ.
Come tutte le applicazioni lineari di R3 in se stesso, la σ e esprimibile, unavolta scelta una base ortonormale M = (uh) di R3, come una matrice
σM =
σ11 σ12 σ13
σ21 σ22 σ23
σ31 σ32 σ33
, (4.27)

46 DANIELE ANDREUCCI
ove
σhk = σuk · uh , h , k = 1 , 2 , 3 .
Iniziamo con l’identificare gli elementi σhk, mostrando che coincidono coni cosiddetti momenti d’inerzia e deviatori del corpo rigido, di cui diamo ladefinizione.
Definizione 4.22. Sia u un vettore unitario. Allora si chiama momentod’inerzia del corpo rigido (C, ρ) rispetto alla retta r per O di direzione u laquantita
Iuu =
∫
Λ(D)
dist(X (t;λ), r)2ρ(λ) dµ(λ) . (4.28)
Definizione 4.23. Siano u e v due vettori unitari, tra di loro ortogonali.Allora si chiama momento deviatore del corpo rigido (C, ρ) rispetto ai duepiani per O di normali u e v la quantita
Iuv = −∫
Λ(D)
[[X (t;λ) −XO(t)] · u
] [[X (t;λ) −XO(t)] · v
]ρ(λ) dµ(λ) .
(4.29)
Osservazione 4.24. Il momento deviatore in sostanza e dato dall’integraledel prodotto delle distanze (con segno) dai piani normali ai due versoriassegnati. Quindi puo assumere in genere valori positivi, negativi o nulli.Invece il momento d’inerzia assume sempre valore non negativo, e in realtasi annulla se e solo se tutti i punti del corpo rigido giacciono su r (casodell’asta rigida).
Osservazione 4.25. La (4.28) si puo anche riscrivere come
Iuu =
∫
Λ(D)
|[X (t;λ) −XO(t)] ∧ u|2 ρ(λ) dµ(λ) . (4.30)
Si noti che Iuu e Iuv dipendono in genere dal tempo t, sia perche i motiX (t;λ) e XO(t) sono funzioni di t, sia perche non abbiamo affatto esclusoche i versori u e v siano anch’essi mobili.Infatti saremo interessati soprattutto a quest’ultimo caso, a causa del se-guente risultato.
Proposizione 4.26. Se XO e u, v sono solidali con il rigido, i momentiIuu e Iuv sono costanti nel tempo.
Dimostrazione. L’enunciato segue subito dalle (4.29) e (4.30), quando sicompia l’osservazione elementare che, se a1 e a2 sono vettori solidali conuna medesima terna mobile M, le quantita
a1 · a2 , |a1 ∧ a2|sono costanti nel tempo, come segue subito dalla Definizione 2.8.

4.4. SCOMPOSIZIONE DEL TENSORE D’INERZIA. ASSI PRINCIPALI. 47
Nel prossimo Teorema si prescinde comunque da ogni assunzione sulla soli-dalita di O e u, v.
Teorema 4.27. Se u e un vettore unitario, allora
σu · u = Iuu . (4.31)
Se u e v sono due vettori unitari ortogonali tra di loro, allora
σu · v = Iuv . (4.32)
Dimostrazione. Per la definizione (4.16) di σ si ha, invocando anche ilLemma A.6
σu · u = −∫
Λ(D)
[X (t;λ) −XO(t)] ∧[[X (t;λ) −XO(t)] ∧ u
]· uρ(λ) dµ(λ)
=
∫
Λ(D)
∣∣[X (t;λ) −XO(t)]∧ u
∣∣2 ρ(λ) dµ(λ) = Iuu .
Ancora dalla definizione (4.16) e dal Lemma A.18 segue che
σu · v = −∫
Λ(D)
[X (t;λ) −XO(t)] ∧[[X (t;λ) −XO(t)] ∧ u
]· vρ(λ) dµ(λ)
= −∫
Λ(D)
[[X (t;λ) −XO(t)] · u
][X (t;λ) −XO(t)]
− |X (t;λ) −XO(t)|2 u· vρ(λ) dµ(λ) = Iuv ,
ricordando che u e v sono ortogonali.
Nel seguito, fissata una terna M = (uh), denoteremo
Ihk = Iuhuk.
Come immediata conseguenza del Teorema 4.27 si ha
Corollario 4.28. La matrice che rappresenta σ in M e simmetrica esoddisfa
σM =
I11 I12 I13I12 I22 I23I13 I23 I33
. (4.33)
Il seguente risultato e centrale nella meccanica dei rigidi.
Teorema 4.29. La forma quadratica definita da σ e semidefinita positiva,ed e anzi definita positiva se il corpo rigido non e composto di soli puntiallineati su una retta.
Dimostrazione. Sia v un qualunque vettore diR3, non nullo, e denotiamo
u =v
|v| .
Allora
σv · v = Iuu|v|2 ≥ 0 .

48 DANIELE ANDREUCCI
La disuguaglianza e stretta se i punti di (C, ρ) non sono tutti allineati sullaretta per O parallela a u, come gia osservato.
La forma quadratica definita da σ, nella base M, si scrive come
σv · v = σMx · x =
3∑
h,k=1
Ihkxhxk , se v =
3∑
h=1
xhuh . (4.34)
Ricordiamo il seguente risultato, noto dall’algebra lineare:
Lemma 4.30. Sia A una matrice N×N simmetrica reale. Esiste allora unamatrice invertibile reale N ×N B tale che B−1 = Bt e che
BtAB
e una matrice diagonale.
Teorema 4.31. Sia XO un moto solidale con il rigido. Esiste (almeno)una terna solidale M = (uh) tale che la matrice σM e diagonale, ossia
σM =
I11 0 00 I22 00 0 I33
. (4.35)
Dimostrazione. Iniziamo con lo scomporre σ in una qualunque terna so-lidale ortonormale N = (wh); la relativa matrice σN e simmetrica, comevisto nel Corollario 4.28. Quindi esiste una matrice B = (bij) come nelLemma 4.30 tale che
BtσNB = diag(α1, α2, α3) ,
per tre numeri reali opportuni αh. Si noti che B e gli αh sono costanti neltempo perche σN e costante nel tempo (vedi la Proposizione 4.26).Definiamo poi
uh =3∑
i=1
bihwi , h = 1 , 2 , 3 .
In altri termini, le componenti di ciascun uh nella base N formano unacolonna di B: e noto, ma comunque verifichiamolo, che anche M = (uh) eortonormale. Infatti (se (eh) denota la base standard in R3)
uh · uk = Beh · Bek = (Bek)tBeh = ek
tBtBeh = ekteh = δhk .
E poi ovvio per definizione che M e solidale.Resta da dimostrare che la matrice σM e diagonale. Calcoliamone l’elementodi posizione hk:
σuh · uk = σNBeh · Bek = (Bek)tσNBeh = ek
tBtσNBeh
= ekt diag(α1, α2, α3)eh = αhδhk .
E quindi dimostrata la (4.35) con Ihh = αh.
Definizione 4.32. Una terna M tale che valga la (4.35) si dice principaled’inerzia in O.Piu in generale, un versore v tale che
Ivu = 0
per ogni u normale a v si dice principale.

4.4. SCOMPOSIZIONE DEL TENSORE D’INERZIA. ASSI PRINCIPALI. 49
Ricordiamo che un vettore v 6= 0 si dice autovettore per σ con autovaloreC ∈ R se
σv = Cv .
Si verifica che C ∈ R e un autovalore se e solo se
det(σM − CI) = 0 . (4.36)
Segue subito dalla Definizione 4.32
Corollario 4.33. Un versore e principale se e solo se e un autovettore diσ.
Quindi, dal Teorema 4.31 si ha
Corollario 4.34. Fissiamo O solidale. La σ ha tre autovalori reali coin-cidenti con i momenti Ihh relativi a una terna principale d’inerzia in O. Gliautovettori corrispondenti sono i versori della terna medesima.
La (4.34) diviene, se M e principale,
σMx · x = I11x21 + I22x
22 + I33x
23 . (4.37)
4.4.1. Proprieta di estremo degli assi principali. Se
u =
3∑
h=1
αhuh ,
ove (uh) e una terna principale, e αh ∈ R, allora da (4.37) segue, introdu-
cendo il vettore colonna (αh) = (α1, α2, α3)t
Iuu = σu · u = σM(αh) · (αh) =3∑
h=1
Ihhα2h . (4.38)
Proposizione 4.35. Vale per ogni versore u, se (uh) e una terna principale,
min1≤h≤3
Ihh ≤ Iuu ≤ max1≤h≤3
Ihh . (4.39)
Se I11 = I22, allora
Iuu = I11 = I22 , per ogni u = α1u1 + α2u2. (4.40)
Se poi I11 = I22 = I33, allora Iuu = I11 per ogni u.
Dimostrazione. Ovvia per la (4.38), e per
α21 + α2
2 + α23 = 1 .
Il Lemma 4.30 e il Teorema 4.31 possono essere sostituiti, in vista del Corollario 4.33, dalseguente risultato, che ha il vantaggio di porre in luce piu diretta le proprieta di massimoe minimo della terna principale.
Teorema 4.36. Se A = (aij) e una matrice reale simmetrica 3× 3, allora esiste una base
ortonormale in R3 formata di autovettori di A.
Tra i corrispondenti autovalori si trovano il massimo e il minimo della forma quadratica
xtAx , |x| = 1 .

50 DANIELE ANDREUCCI
Dimostrazione. Consideriamo la funzione
f(x) =xtAx
|x|2∈ C
∞`
R3 \ 0
´
.
Poiche per ogni scalare γ 6= 0 si ha f(γx) = f(x), in particolare vale
f(x) = f“ x
|x|
”
, x 6= 0 ,
e quindi f assume tutti i suoi valori sulla sfera
S = x ∈ R3 | |x| = 1 .
Dunque f ha minimo [rispettivamente massimo] assoluto in R3 \ 0, assunto in x1 ∈ S
[rispettivamente in x2 ∈ S]. In questi punti deve quindi annullarsi il gradiente ∇ f , che sitrova calcolando
∂f
∂xi
=2
|x|4
h
|x|23
X
h=1
aihxh − xi
3X
h,k=1
ahkxhxk
i
, i = 1, 2, 3 ,
come segue dal Teorema A.20. Dunque si ha
∇ f(x) =2
|x|4
h
|x|2Ax − (xtAx)x
i
.
In particolare quindi, visto che |xi| = 1, si ha per i = 1, 2,
Axi = Cixi , Ci := xitAxi . (4.41)
Dunque x1 e x2 sono autovettori di A.Distinguiamo poi due casi:A) Se vale la disuguaglianza stretta
C1 = min f < max f = C2 , (4.42)
per il Teorema A.21 x1 e x2 sono ortonormali. Consideriamo poi il terzo versore ortonor-male
x3 = x1 ∧ x2 ,
cosicche (xh) risulta una terna ortonormale positiva. Resta solo da dimostrare che anchex3 e un autovettore di A.Valgono, per la simmetria di A,
xitAx3 = x3
tAxi = Cix3
txi = 0 , i = 1, 2 .
Dunque Ax3 risulta ortogonale sia a x1 che a x2, e percio deve essere diretto lungo x3:
Ax3 = C3x3 ,
per C3 ∈ R opportuno.B) Se invece vale l’uguaglianza
C1 = min f = max f = C2 , (4.43)
allora la f e costante. Quindi tutti i punti di S sono di massimo e di minimo, tutti sonoautovettori, ed e senz’altro possibile scegliere una terna ortonormale positiva di autovettoridi A.
Osservazione 4.37. Con riferimento alla notazione della dimostrazione del Teorema 4.36,nel caso min f < max f anche x3 ha un significato per la ricerca dei minimi e dei massimidi f . Infatti x3 e il punto ove la f , ristretta alla circonferenza
Σ = S ∩ x · x2 = 0 ,
raggiunge il massimo. Dimostriamo questo fatto.Σ puo essere descritta come
x = x1 cos ϕ + x3 sin ϕ , ϕ ∈ R .
Dunque per x ∈ Σ
f(x) = (x1 cos ϕ + x3 sin ϕ)tA(x1 cos ϕ + x3 sin ϕ)
= C1 cos2 ϕ + C3 sin2ϕ =: g(ϕ) .

4.5. RICERCA DEGLI ASSI PRINCIPALI 51
Derivando in ϕdg
dϕ= 2(C3 − C1) sin ϕ cos ϕ .
I punti di estremo si ottengono percio come
ϕ = nπ , f(x) = f(x1) ,
ϕ =π
2+ nπ , f(x) = f(x3) ,
al variare di n ∈ Z . Dunque, visto che f(x1) = min f , deve essere
f(x3) = maxΣ
f .
4.5. Ricerca degli assi principali
Notazione. Denotiamo con un apice il punto in cui si calcola la quantita:per esempio IG
uu e un momento d’inerzia calcolato nel centro di massa G.
Definizione 4.38. Un corpo rigido (C, ρ,S) si dice avere un piano solidaledi simmetria materiale ortogonale Π se la funzione densita ρ e simmetricarispetto a Π, ossia se, data l’equazione del piano
λ · ν = λ0 · ν ,con ν versore normale e λ0 ∈ R3 fissato, vale per ogni λ ∈ Λ∗
ρ(λ) = ρ(λ′) , per λ′ = λ− 2(λ− λ0) · ν ν . (4.44)
Teorema 4.39. Se il corpo rigido ha un piano solidale di simmetria mate-riale ortogonale Π, in ogni punto di Π l’asse ortogonale a Π e principaled’inerzia.
Dimostrazione. Si tratta di dimostrare che
Iνu = 0
per ogni versore u normale a ν. Introduciamo la notazione
Σ+ = λ | λ · ν > λ0 · ν , Σ− = λ | λ · ν < λ0 · ν ,
Σ0 = λ | λ · ν = λ0 · ν = Π .
Allora si ha per definizione
Iνu = −
Z
Λ(D)
[(λ − λ0) · ν] [(λ − λ0) · u] ρ(λ) dµ(λ)
= −
Z
Σ+
. . . −
Z
Σ−
. . . −
Z
Σ0
. . . .
Vale anzituttoZ
Σ0
[(λ − λ0) · ν ] [(λ − λ0) · u] ρ(λ) dµ(λ) = 0 .
Osserviamo che, con la notazione λ′ introdotta in (4.44) si ha
λ′ ∈ Σ+ ⇐⇒ λ ∈ Σ− .
Per la simmetria di λ e λ′ valgono le
(λ − λ0) · ν = −(λ′ − λ0) · ν , (λ − λ0) · u = (λ′ − λ0) · u .

52 DANIELE ANDREUCCI
DunqueZ
Σ−
[(λ − λ0) · ν ] [(λ − λ0) · u] ρ(λ) dµ(λ)
=
Z
Σ−
[−(λ′ − λ0) · ν] [(λ′ − λ0) · u] ρ(λ) dµ(λ)
= −
Z
Σ+
[(λ′ − λ0) · ν ] [(λ′ − λ0) · u] ρ(λ) dµ(λ′)
= −
Z
Σ+
[(λ′ − λ0) · ν ] [(λ′ − λ0) · u] ρ(λ′) dµ(λ′) .
Quindi Iνu = 0.
Esercizio 4.40. (Simmetrie di rotazione) Sia (C, ρ,S) un rigido con unasimmetria materiale di rotazione intorno all’asse solidale r. Allora in ciascunpunto di r l’asse r stesso e principale. Gli altri due assi possono essere sceltiad arbitrio, e i due corrispondenti momenti d’inerzia sono uguali.
Proposizione 4.41. Se (C, ρ,S) e un corpo rigido piano, ossia se C e con-tenuto in un piano solidale, allora in un punto P qualsiasi di questo pianol’asse normale al piano e principale.Inoltre, fissata una terna principale che contiene questo asse, il momentod’inerzia relativo a tale asse e la somma dei momenti relativi agli altri dueassi.
Dimostrazione. La prima parte dell’enunciato segue subito dal Teorema 4.39: infatti ilpiano che contiene C e di simmetria materiale ortogonale.Possiamo poi supporre che la normale al piano sia u3, e di denotare con u1, u2 gli altridue vettori della terna principale. Supponiamo anche che il punto P coincida con l’originedel sistema di riferimento solidale. Allora
I33 =
Z
Λ(D)
(λ21 + λ
22)ρ(λ) dµ(λ) =
Z
Λ(D)
λ21ρ(λ) dµ(λ) +
Z
Λ(D)
λ22ρ(λ) dµ(λ) = I11 + I22 ,
visto cheZ
Λ(D)
λ23ρ(λ) dµ(λ) = 0 .
Teorema 4.42. Se P appartiene a uno degli assi di una terna principale diinerzia nel centro di massa, una terna principale in P si trova per traslazionedi quella nel centro di massa.In altri termini: Se (ui) e una terna principale d’inerzia nel centro di massaG, che prendiamo coincidente con O, e se λP e tale che
λP = τuj ,
per opportuni τ ∈ R e j ∈ 1, 2, 3, allora la (ui) e principale anche in λP .
Dimostrazione. Supponiamo per definitezza j = 1. Dobbiamo allora dimostrare che
IP12 = I
P13 = 0 .

4.5. RICERCA DEGLI ASSI PRINCIPALI 53
Si ha
IP12 =
Z
Λ(D)
(λ1 − τ )λ2ρ(λ) dµ(λ)
=
Z
Λ(D)
λ1λ2ρ(λ) dµ(λ) −
Z
Λ(D)
τλ2ρ(λ) dµ(λ)
= IG12 − τλ
G2 = 0 .
Teorema 4.43. (Huygens) Se IPuu denota il momento d’inerzia relativo al
polo P , solidale con il rigido, allora
IPuu = IG
uu +md2 ,
ove G e il centro di massa del rigido, m la sua massa e
d =∣∣∣−−→GP ∧ u
∣∣∣la distanza tra gli assi paralleli a u passanti per P e G rispettivamente.
Dimostrazione. Possiamo supporre che il sistema di riferimento solidale S abbia originein G, e che in tale sistema P abbia coordinate λP . Dunque
IPuu =
Z
Λ(D)
˛
˛
˛(λ − λP ) ∧ u
˛
˛
˛
2
ρ(λ) dµ(λ)
=
Z
Λ(D)
˛
˛
˛(λ ∧ u) − (λP ∧ u)˛
˛
˛
2
ρ(λ) dµ(λ)
=
Z
Λ(D)
|λ ∧ u|2 ρ(λ) dµ(λ) − 2
Z
Λ(D)
(λ ∧ u) · (λP ∧ u)ρ(λ) dµ(λ)
+
Z
Λ(D)
˛
˛
˛λP ∧ u
˛
˛
˛
2
ρ(λ) dµ(λ)
= IGuu + md
2.
InfattiZ
Λ(D)
(λ ∧ u) · (λP ∧ u)ρ(λ) dµ(λ) =
Z
Λ(D)
λρ(λ) dµ(λ) ∧ u · (λP ∧ u) = 0 ,
perche per ipotesi λG = 0.


CAPITOLO 5
Vincoli. Coordinate lagrangiane
5.1. Coordinate locali canoniche per un corpo rigido non
degenere
E chiaro dalla Definizione 4.1 che per definire la posizione di un corpo ri-gido non degenere in R3 sono necessarie in genere sei coordinate, che noiscegliamo come
• le tre coordinate cartesiane xhO dell’origine O di S;• le tre coordinate necessarie a specificare la posizione della terna mobileM = (uh).
5.1.1. Coordinate canoniche di M. Sono possibili varie scelte di coor-dinate per stabilire la posizione di M. Per convenzione ci riferiremo allaseguente come canonica.Consideriamo due moti solidali
X (t;λ′) , X (t;λ′′) , (5.1)
con λ′, λ′′ scelti in modo tale che questi due punti, insieme con XO(t),formino una terna di punti non allineati.Si puo verificare (vedi sotto per i dettagli) che le componenti di u1, u2, u3,nella base (eh) si possono esprimere in termini delle tre coordinate
(ζ1, ζ2, ζ3) ∈ R×R×R ,
individuate da
X (t;λ′) = ζ1e1 + ζ2e2 + ζ ′e3 , X (t;λ′′) = ζ3e1 + ζ ′′e2 + ζ ′′′e3 . (5.2)
Si noti che questa scelta di coordinate, come del resto ogni altra possibile,non e valida per alcune posizioni di M; si vedano sotto i particolari.
Dettagli tecnici: Costruiamo qui una terna solidale e insieme ne troviamo le coordinatecanoniche; comunque e chiaro che, trovate le coordinate di una terna solidale, quelle di unaqualunque altra terna solidale si ottengono dalle prime mediante una rotazione costantenel tempo.Scegliamo ζ1, ζ2 come in (5.2). Si noti che ζ′ risulta allora funzione delle 5 coordinatexhO, ζ1, ζ2, in virtu del fatto che le distanze
L′ :=
˛
˛XO(t) −X (t;λ′)˛
˛ , L′′ :=
˛
˛XO(t) −X (t; λ′′)˛
˛ ,
si mantengono costanti. Cioe vale
ζ′ = x3O +
p
(L′)2 − (x1O − ζ1)2 − (x2O − ζ2)2 ,
ove la scelta della radice positive esprime una limitazione sulle posizioni ammesse per M.Anche la lunghezza α del vettore
fu2 =ˆ
X (t; λ′) −XO(t)˜
∧ˆ
X (t;λ′′) −XO(t)˜
55

56 DANIELE ANDREUCCI
si mantiene costante; si noti che α > 0 per l’ipotesi che i tre punti siano non allineati.Poniamo allora
u3 =1
L′
ˆ
X (t; λ′) −XO(t)˜
, (5.3)
u2 =1
αfu2 . (5.4)
E ovvio che u2 e u3 sono ortonormali. Mostriamo che si possono esprimere in funzionedelle xhO, ζh.Introduciamo per brevita la notazione
ηj =ζj − xjO
L′. j = 1 , 2 . (5.5)
Allora, la posizione di u3 viene individuata dai due parametri
(η1, η2) ∈ B1 := (z1, z2) ∈ R2 | z
21 + z
22 < 1 , (5.6)
cosicche
u3 = η1e1 + η2e2 +q
1 − η21 − η2
2e3 . (5.7)
La posizione di u2 viene percio individuata dalle 5 coordinate (xhO), ζ1, ζ2, e, in principio,dalle 3 coordinate di X (t; λ′′). Tuttavia devono valere
(ζ3 − x1O)2 + (ζ′′ − x2O)2 + (ζ′′′ − x3O)2 = (L′′)2 ,
(ζ1 − ζ3)2 + (ζ2 − ζ
′′)2 + (ζ′ − ζ′′′)2 = d
2,
ove
d :=˛
˛X (t; λ′) −X (t; λ′′)˛
˛ > 0 .
Questo sistema permette di ricavare ζ′′ e ζ′′′ in funzione delle xhO, ζh. Resta quindidimostrato che anche la posizione di u2 viene individuata dalle medesime 6 coordinate.Infine
u1 = u2 ∧ u3 . (5.8)
Si noti che alcune posizioni restano escluse da questa scelta, per esempio quelle ove u3·e3 ≤
0. Le posizioni ove u3 · e3 < 0 si ottengono cambiando il segno della terza componente
di u3 nella (5.7), mentre quelle limite ove u3 · e3 = 0 richiedono una diversa scelta della
parametrizzazione. Considerazioni analoghe valgono anche per u1 e u2, perche, in modo
analogo a quanto fatto per la ζ′, anche nella determinazione di ζ′′ e di ζ′′′ va scelto il
segno di certe radici quadrate.
5.1.2. Un’altra scelta di coordinate di M. Iniziamo con il determinare la posizionedi u3, ossia la posizione di un punto sulla sfera di raggio 1 di R3. Come e noto, questaviene individuata da due angoli
− π < ϑ1 < π , 0 < ϑ2 < π , (5.9)
mediante la
u3 = cos ϑ1 sin ϑ2e1 + sin ϑ1 sin ϑ2e2 + cos ϑ2e3 . (5.10)
Il vettore u1 appartiene alla circonferenza massima γ ortogonale a u3, che e parametrizzatadall’angolo ϑ3, con
− π < ϑ3 < π , (5.11)
secondo laΨ (ϑ3) = cos ϑ3w1 + sin ϑ3w2 , (5.12)
ove w1, w2 costituiscono una base nel piano ortogonale a u3. Prendiamo
w1 = cos ϑ1 cos ϑ2e1 + sin ϑ1 cos ϑ2e2 − sin ϑ2e3 , (5.13)
w2 = u3 ∧w1 = − sin ϑ1e1 + cos ϑ1e2 . (5.14)
Dunque, per un valore opportuno di ϑ3,
u1 = (cos ϑ1 cos ϑ2 cos ϑ3 − sin ϑ1 sin ϑ3)e1
+ (sin ϑ1 cos ϑ2 cos ϑ3 + cos ϑ1 sin ϑ3)e2
− sin ϑ2 cos ϑ3e3 ,
(5.15)

5.2. COORDINATE LOCALI CANONICHE PER UN CORPO RIGIDO DEGENERE 57
e
u2 = u3 ∧ u1 = −(cos ϑ1 cos ϑ2 sin ϑ3 + sin ϑ1 cos ϑ3)e1
+ (− sin ϑ1 cos ϑ2 sin ϑ3 + cos ϑ1 cos ϑ3)e2
+ sin ϑ2 sin ϑ3e3 .
(5.16)
La scelta degli angoli ϑh indicata sopra e valida con l’eccezione di alcune posizioni dellaterna M, ossia di quelle che corrisponderebbero ai valori limite
ϑ1 = ±π , ϑ2 = 0 , ϑ2 = π , ϑ3 = ±π .
Volendo descrivere il moto di M in un intorno di tali posizioni occorre una diversa scelta
di coordinate.
Definizione 5.1. I parametri
(x1O, x2O, x3O, ζ1, ζ2, ζ3)
si dicono coordinate locali canoniche del sistema rigido solidale con S.
5.1.3. Rappresentazione del moto di S in coordinate locali. De-notiamo con uh la funzione che esprime uh in termini delle coordinatelocali.Un qualunque moto solidale con S puo essere rappresentato, per un λ =(λh) ∈ R3 fissato in modo opportuno, da
X (t;λ) = XO(t) +
3∑
h=1
λhuh(t)
=3∑
j=1
xjO(t) +
3∑
h=1
λhuh(x1O(t), . . . , ζ3(t)) · ej
ej . (5.17)
Il membro di destra della (5.17) dipende da t solo mediante le xhO, ζh.Infatti i prodotti uh · ej sono calcolati usando le (5.4), (5.7), e (5.8).Se si usano invece altre scelte di coordinate, per esempio, le (5.10), (5.15),(5.16), queste possono essere sostituite nella (5.17), ottenendo X (t;λ) infunzione di xhO, ϑh.
5.2. Coordinate locali canoniche per un corpo rigido degenere
E chiaro dalla Definizione 4.2 che per definire la posizione di un’asta rigidain R3 sono necessarie in genere cinque coordinate, che noi scegliamo come
• le tre coordinate cartesiane xhO del punto O;• le due coordinate necessarie a specificare la posizione del versore mobileu.
5.2.1. Coordinate canoniche di u. Consideriamo un moto
X (t;λ′) , (5.18)
con λ′ ∈ R scelto in modo tale che
X (t;λ′) −XO(t) = Lu(t) , (5.19)
per una costante L > 0.

58 DANIELE ANDREUCCI
Definiamo poi le coordinate locali ζ1, ζ2 come in (5.2). Allora la posizionedi u, e quindi tutti i moti solidali con l’asta, si possono esprimere in terminidelle cinque coordinate locali xhO e ζh.Denotiamo con u la funzione che esprime u in termini delle coordinate locali.Un qualunque moto solidale con l’asta puo essere rappresentato, per unλ ∈ R fissato in modo opportuno, da
X (t;λ) = XO(t) + λu(t)
=3∑
j=1
xjO(t) + λu(x1O(t), . . . , ζ2(t)) · ej
ej . (5.20)
Il membro di destra della (5.20) dipende da t solo mediante le xhO, ζh.
Infine, dalla Definizione 4.8 segue subito che per definire la posizione di unpunto inR3 sono necessarie in genere tre coordinate, che noi scegliamo come
• le tre coordinate cartesiane xhO del punto O.
Il moto del punto puo essere quindi rappresentato da
X (t; 0) = XO(t) =
3∑
j=1
xjO(t)ej . (5.21)
Il membro di destra della (5.21) dipende da t solo mediante le xhO.
Osservazione 5.2. Se il corpo rigido non e un punto materiale, nella sceltadelle coordinate locali il moto X (t;λ′), e anche il moto X (t;λ′′) nel casodel corpo rigido non degenere, possono in principio essere scelti ad arbitrio,una volta soddisfatte le condizioni enunciate sopra, tra tutti i moti solidalicon il rigido stesso.Nel seguito tuttavia supporremo sempre che questi moti siano scelti in modoche λ′, λ′′ ∈ Λ(D).Questo garantisce che le coordinate locali canoniche siano coordinate car-tesiane di moti solidali di punti in Λ(D), ossia di punti ove la densita epositiva: ρ(λ′), ρ(λ′′) > 0.Questo fatto e poi ovvio nel caso del punto materiale.
5.3. Vincoli olonomi
Consideriamo un sistema di n ≥ 1 corpi rigidi
(Ci, ρi) | i = 1 , . . . , n . (5.22)
La posizione di questi corpi, cioe la configurazione del sistema, viene indivi-duata dalle nc coordinate locali (vedi le Sezioni 5.2 e 5.1)
ξ := (ξ1, . . . , ξnc) ∈ Ξ ,
ove l’aperto Ξ e ottenuto come prodotto cartesiano degli aperti di definizionedelle coordinate locali di ciascun (Ci, ρi), e, come e evidente,
nc = 6 × numero dei rigidi non degeneri
+5 × numero delle aste rigide
+3 × numero dei punti materiali.
Infine sia I l’intervallo aperto di R in cui varia il tempo t.

5.3. VINCOLI OLONOMI 59
Notazione. Nel seguito indichiamo con l’indice (o con l’apice) i una qua-lunque quantita riferita al corpo rigido (Ci, ρi).
Definizione 5.3. Un insieme di vincoli olonomi per il sistema (5.22) e unsistema di equazioni
fj(ξ, t) = 0 , j = 1 , . . . ,m , (5.23)
con m < nc, ove, per ogni j, fj ∈ CK(Ξ × I), K ≥ 2. Inoltre assumiamoche l’insieme delle configurazioni ammissibili
Ξf (t) = ξ ∈ Ξ | vale (5.23) (5.24)
sia non vuoto per ogni t ∈ I, e che la matrice iacobiana
(∂fj
∂ξk
)(ξ, t) =
∂f1
∂ξ1. . . . . . ∂f1
∂ξnc
. . . . . . . . . . . . . . . . . . . .∂fm
∂ξ1. . . . . . ∂fm
∂ξnc
(5.25)
abbia caratteristica massima, cioe uguale a m, in ogni punto di Ξf (t), perogni t ∈ I.
Definizione 5.4. Il vincolo fj si dice fisso se non dipende dal tempo, ossiase
∂fj
∂t(ξ, t) = 0 ,
per ogni (ξ, t) ∈ Ξ × I.In caso contrario si dice mobile.
5.3.1. Coordinate indipendenti. Possiamo assumere senza perdita digeneralita che il minore della matrice iacobiana con determinante diverso da0 sia quello relativo alle ultime m coordinate:
det
∂f1
∂ξnc−m+1. . . ∂f1
∂ξnc
. . . . . . . . . . . . . . . . . . . .∂fm
∂ξnc−m+1. . . ∂fm
∂ξnc
6= 0 .
Il teorema del Dini garantisce allora, sotto le ipotesi della Definizione 5.3,che le prime
ℓ := nc −m
coordinate ξk, ossia leξ1 , . . . , ξℓ ,
siano coordinate indipendenti, cioe siano tali che le soluzioni di (5.23) pos-sano essere descritte in termini solo di queste, almeno localmente.Vale a dire, per ogni ξ0 ∈ Ξf (t0) esistono un δ > 0 e funzioni gj tali che
ξ′ ∈ Ξf (t′) ∩ |ξ − ξ0| < δ , |t′ − t0| < δ ,
se e solo se
ξ′ℓ+1 = gℓ+1(ξ′1, . . . , ξ
′ℓ, t
′) ,
. . .
ξ′nc= gnc(ξ
′1, . . . , ξ
′ℓ, t
′) ,
congj ∈ CK
(Ξδ × (t0 − δ, t0 + δ)
),

60 DANIELE ANDREUCCI
con Ξδ ⊂ Rℓ aperto opportuno. Si noti che la scelta di (ξ′1, . . . , ξ′ℓ) ∈ Ξδ e
arbitraria.
Definizione 5.5. Il numero ℓ ≥ 1 si dice numero dei gradi di liberta delsistema a vincoli olonomi (Ci, ρi).
Osservazione 5.6. Se tutti i vincoli sono fissi le gj non dipendono da t.
Osservazione 5.7. Il moto del sistema (Ci, ρi) risulta quindi descritto inmodo completo quando siano note le ℓ coordinate indipendenti come funzionidel tempo.
Esercizio 5.8. Un punto e vincolato a stare sull’intersezione del piano x3 =a, a ∈ R, e del paraboloide x3 = x1x2. Si discuta l’olonomia dei vincoli.
5.4. Coordinate lagrangiane
Conviene spesso usare nella descrizione del moto del sistema olonomo uninsieme di coordinate diverso da quello delle coordinate locali indipendentiintrodotto nella Sezione 5.3.Sia
q = (q1, . . . , qℓ) ∈ Q ,
con Q aperto di Rℓ.Consideriamo una parametrizzazione
ξj = ξlj (q, t) , j = 1 , . . . , nc . (5.26)
Si assume che le
(ξlj (·, t)) : Q→ Ξf (t)
soddisfino
(1) la (5.26) e iniettiva (e quindi una corrispondenza biunivoca tra Q e lasua immagine);
(2) ξlj ∈ CK(Q× I);
(3) la matrice iacobiana completa, ossia la
(∂ξlj∂qh
)=
∂ξl1
∂q1. . .
∂ξl1
∂qℓ
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .∂ξl
nc
∂q1. . .
∂ξlnc
∂qℓ
ha caratteristica massima, pari a ℓ, per ogni q ∈ Q, t ∈ I.
Definizione 5.9. Con la notazione introdotta sopra, le funzioni
ξj = ξlj (q, t) , j = 1 , . . . , nc , (5.27)
si dicono la rappresentazione lagrangiana del moto.Le qh si dicono anche coordinate lagrangiane.
Osservazione 5.10. Nello stesso spirito dell’Osservazione 5.6, supporremosempre che se tutti i vincoli sono fissi le ξlj non dipendano da t.

5.4. COORDINATE LAGRANGIANE 61
Esempio 5.11. Un cilindro retto di raggio R e altezza L e vincolato ad avere il centro C
sulla circonferenza
γ :
(
x21 + x
22 = a
2,
x3 = 0 ;
qui R, L, a sono costanti positive, e le xi denotano le coordinate nel sistema fisso (O, ei).Inoltre e vincolato ad avere l’asse parallelo a e3.A) Coordinate locali per il corpo rigido. Seguendo la Sottosezione 5.1.1, introduciamo leseguenti coordinate:
ξ1 = x1C , ξ2 = x2C , ξ3 = x3C , ξ4 = x1A , ξ5 = x2A , ξ6 = x1B ,
ove A e il centro della base superiore del cilindro, e B un punto solidale scelto sullacirconferenza equatoriale del cilindro. Questa scelta di coordinate locali e valida per ogni
posizione di C, e per−→CA · e3 > 0,
−−→CB · e2 > 0.
Si noti che la scelta delle coordinate locali e indipendente dai vincoli.B) In queste coordinate, i vincoli si esprimono come:
f1(ξ) = ξ21 + ξ
22 − a
2,
f2(ξ) = ξ3 ,
f3(ξ) = ξ4 − ξ1 ,
f4(ξ) = ξ5 − ξ2 .
Le f1 = 0, f2 = 0 impongono che C appartenga alla γ, mentre le f3 = 0, f4 = 0 impongono
che−→CA sia parallelo a e3.
Calcoliamo la matrice iacobiana0
B
B
@
2ξ1 2ξ2 0 0 0 00 0 1 0 0 0−1 0 0 1 0 00 −1 0 0 1 0
1
C
C
A
.
E chiaro che il minore formato dalle colonne di posto 1, 3, 4, 5 e non singolare, se ξ1 6= 0. Sepoi ξ1 = 0, deve essere ξ2 6= 0 per f1 = 0, e quindi risulta non singolare il minore formatodalle colonne di posto 2, 3, 4, 5. La caratteristica della matrice iacobiana pertanto esempre massima, e il vincolo e olonomo.C) Coordinate indipendenti. Restringiamoci a un aperto diRnc = R6 ove ξ2 > 0. Dunquele (ξ1, ξ6) sono le coordinate indipendenti, e il sistema di vincoli fj = 0, j = 1, 2, 3, 4, sipuo risolvere (almeno localmente) nelle ξ2, ξ3, ξ4, ξ5, come
ξ2 = g2(ξ1, ξ6) =q
a2 − ξ21 ,
ξ3 = g3(ξ1, ξ6) = 0 ,
ξ4 = g4(ξ1, ξ6) = ξ1 ,
ξ5 = g5(ξ1, ξ6) =q
a2 − ξ21 .
Si noti che la scelta delle coordinate indipendenti e conseguente all’imposizione dei vincoli.D) Coordinate lagrangiane. Consideriamo le due coordinate:
ϕ = angoloe1
−−→OC; θ = angolo
e1
−−→CB.
La rappresentazione lagrangiana sara
ξl1 = a cos ϕ , ξ
l2 = a sin ϕ , ξ
l3 = 0 , ξ
l4 = a cos ϕ , ξ
l5 = a sin ϕ ,
ξl6 = a cos ϕ + R cos θ .
(5.28)
Prendiamo anche
(ϕ, θ) ∈ Q := (−π, π) × (0, π) .
La matrice iacobiana (qui rappresentata in forma trasposta)„
−a sin ϕ a cos ϕ 0 −a sin ϕ a cos ϕ −a sin ϕ
0 0 0 0 0 −R sin θ
«

62 DANIELE ANDREUCCI
ha caratteristica massima, pari a ℓ = 2, in ogni (ϕ, θ) ∈ Q. La (5.28) e iniettiva, esoprattutto, porta Q nell’insieme delle configurazioni ammissibili Ξf (t).
5.5. Sistemi vincolati a un piano
Consideriamo il caso di un sistema di n punti Pi vincolati a stare sullo stessopiano costante, per esempio
x3 = 0 .
Se i vincoli sono in tutto m si avra allora
n ≤ m < nc = 3n .
Infatti tra i vincoli appariranno almeno:
ξ3i = 0 , i = 1, . . . , n , (5.29)
oveXi(t) = ξ3i−2e1 + ξ3i−1e2 + ξ3ie3 .
Supponiamo per definitezza che i vincoli in (5.29) siano i primi n.Si puo supporre inoltre che gli altri eventuali vincoli fj non contengano leξ3i, che sono costanti, ossia si assume che
∂fj
∂ξ3i
= 0 , n < j ≤ m. (5.30)
Allora le righe 1 ≤ i ≤ n della matrice iacobiana (5.25) sono ciascuna nullacon l’eccezione dell’elemento di posto 3i, che vale 1. Le colonne di posto 3iavranno solo questo elemento diverso da 0.Risulta quindi chiaro che la caratteristica della matrice iacobiana e massimase e solo se lo e quella della matrice ridotta ottenuta cancellando le righecorrispondenti ai vincoli (5.29) e le colonne corrispondenti alle coordinateξ3i. In sostanza, dal punto di vista della parametrizzazione lagrangiana, ivincoli (5.29) si possono considerare in modo implicito, rappresentando ilmoto in uno spazio a due dimensioni
X i(t) = ξ3i−2e1 + ξ3i−1e2 . (5.31)
Nel caso particolare in cui m = n, cioe non ci sono altri vincoli oltre a quelliin (5.29), i moti Xi in (5.31) sono liberi.
Esempio 5.12. Consideriamo un punto P vincolato al piano x3 = 0. Nel sen-so specificato sopra, possiamo considerare questo come un moto piano libero.Come coordinate lagrangiane possiamo scegliere le coordinate cartesiane, oanche quelle polari. Sviluppiamo quest’ultima scelta:
x1 = r cosϕ , x2 = r sinϕ ,
con(r, ϕ) ∈ Q = (0,∞) × (−π, π) .
Vale∂(x1, x2)
∂(r, ϕ)=
(cosϕ −r sinϕsinϕ r cosϕ
),
che ha determinante pari a r > 0.Definiamo
u(ϕ) = (cosϕ, sinϕ) , τ (ϕ) = (− sinϕ, cosϕ) .

5.5. SISTEMI VINCOLATI A UN PIANO 63
Il versore u si dice versore radiale, e τ si dice versore trasversale. Si notiche
du
dϕ= τ ,
dτ
dϕ= −u .
DunqueX (t) = r(t)u
(ϕ(t)
), (5.32)
e la velocita e data da
v(t) = r(t)u(ϕ(t)
)+ r(t)ϕ(t)τ
(ϕ(t)
). (5.33)
Il primo termine a destra nella (5.33) si dice velocita radiale, e il secondovelocita trasversale. L’accelerazione si ottiene derivando v come
a(t) = [r(t) − r(t)ϕ(t)2]u(ϕ(t)
)+ [2r(t)ϕ(t) + r(t)ϕ(t)]τ
(ϕ(t)
). (5.34)
Come gia fatto per la velocita si definiscono le accelerazioni radiale e tra-sversale.Per esempio si ha per l’energia cinetica, assegnata la massa M ,
T (t) =1
2M
[r(t)2 + r(t)2ϕ(t)2
].
Esempio 5.13. Consideriamo un sistema formato da due punti vincolati alpiano x3 = 0, con coordinate cartesiane
P1 = (ξ1, ξ2) , P2 = (ξ4, ξ5) ,
sottoposti ai vincoli
ξ21 + ξ22 = R2 , (5.35)
(ξ4 − ξ1)2 + ξ22 = L2 , (5.36)
ξ5 = 0 . (5.37)
Dunque P1 e vincolato alla circonferenza di raggio R > 0, e centro nell’o-rigine, P2 e vincolato all’asse x, e i due punti sono a distanza fissa L >0.E chiaro che l’insieme delle configurazioni ammissibili Ξf e non vuoto perogni scelta di R e L. Tuttavia, se e solo se R = L, in certe configura-zioni i vincoli non sono olonomi: si veda la Figura 5.1. I dettagli sononell’Appendice B.
Esercizio 5.14. Discutere la corrispondenza tra le configurazioni del siste-ma e le curve nella Figura 5.1.

64 DANIELE ANDREUCCI
A)
ξ1 ξ2
ξ4
B)
ξ1 ξ2
ξ4
C)
ξ1 ξ2
ξ4
Figura 5.1. Il cilindro retto ha equazione (5.35); quello obli-quo ha equazione (5.36). Ξf e dato dall’intersezione dei duecilindri.A) R > L, R/L = 1, 1: Ξf e formato da due curve regolari.B) R = L: Ξf e formato da quattro curve regolari, e da duepunti in vicinanza dei quali Ξf non e una curva regolare.C) R < L, R/L = 0, 9: Ξf e formato da due curve regolari.

Parte 3
Come determinare il moto


CAPITOLO 6
Quantita meccaniche in coordinate lagrangiane
Notazione. Consideriamo un sistema (Ci, ρi) di corpi rigidi, come in(5.22).L’indice i ∈ 1 , . . . , n e riservato nel seguito a denotare quantita associateall’i-esimo corpo rigido.In particolare Λ∗
i denotera lo spazio delle coordinate solidali con l’i-esimocorpo rigido (che coincide con R3 nel caso di un corpo rigido non degenere,con R nel caso dell’asta, con 0 nel caso del punto).
6.1. Cinematica
Abbiamo visto nel Capitolo 5 che le posizioni di un sistema vincolato dirigidi sono in corrispondenza biunivoca con le ℓ-ple di coordinate localiindipendenti, o, in modo equivalente, con le coordinate lagrangiane q.In altre parole, la configurazione del sistema (Ci, ρi) all’istante t ∈ I erappresentata in modo univoco da un punto ξ(t) ∈ Ξf (t), ossia da un puntoq(t) ∈ Q.
Definizione 6.1. La funzione q : I → Q si dice moto lagrangiano, o, perbrevita, moto.Le funzioni
Xli : Q× I × Λ∗
i → R3
che si ottengono sostituendo alle ξj le funzioni ξlj nella (5.17) (o nella (5.20),
o nella (5.21)) si dicono ancora la rappresentazione lagrangiana del moto,come gia le ξlj stesse.
Secondo la Definizione 6.1
Xli = Xl
i (q, t;λ) , (6.1)
e, una volta assegnato un moto q, le
Xli (q(t), t;λ) ,
definiscono tutti i moti solidali con uno dei rigidi che compongono il sistemaolonomo.
Osservazione 6.2. Se tutti i vincoli sono fissi, le Xli non dipendono in
modo esplicito da t (cioe dipendono da t solo attraverso le qh). Quindi inquesto caso,
∂Xli
∂t(q, t;λ) = 0 , per ogni q ∈ Q, t ∈ I, λ ∈ Λ∗
i . (6.2)
Infatti la dipendenza esplicita da t in (6.1) si ha solo attraverso le gj in(5.27) (e vedi anche le Osservazioni 5.6 e 5.10).
67

68 DANIELE ANDREUCCI
Lemma 6.3. Vale
d
dtXl
i (q(t), t;λ) = vli (q(t), q(t), t;λ) , (6.3)
ove la funzione
vli : Q×Rℓ × I × Λ∗
i → R3 ,
risulta definita da
vli (q,p, t;λ) =
ℓ∑
h=1
∂Xli
∂qh(q, t;λ)ph +
∂Xli
∂t(q, t;λ) . (6.4)
Dimostrazione. La (6.3) segue in modo diretto dal teorema di derivazionedi funzione composta.
La funzione vli si dice anche velocita in coordinate lagrangiane.
Osservazione 6.4. Se tutti i vincoli sono fissi la (6.3) si riduce a
d
dtXl
i (q(t);λ) =ℓ∑
h=1
∂Xli
∂qh(q(t);λ)qh(t) (6.5)
(vedi (6.2)).Si noti che nella (6.5), con abuso di notazione, abbiamo omesso la dipendenzaesplicita da t delle Xl
i (che appunto sarebbe solo formale) .
Osservazione 6.5. Nella (6.4), le variabili ph sono indipendenti dalle qh.Tuttavia, nel seguito, si scegliera molto spesso, assegnata una funzione t 7→q(t),
q = q(t) , p = q(t) .
Per questo motivo si introduce nella notazione la convenzione
∂
∂qh=
∂
∂ph
. (6.6)
Lemma 6.6. Vale
d
dtvl
i (q(t), q(t), t;λ) = ali (q(t), q(t), q(t), t;λ) , (6.7)
ove la funzione
ali : Q×Rℓ ×Rℓ × I × Λ∗
i → R3 ,
risulta definita da
ali (q,p, r, t;λ) =
ℓ∑
h,k=1
∂2Xli
∂qh∂qk(q, t;λ)phpk +
ℓ∑
h=1
∂Xli
∂qh(q, t;λ)rh
+ 2
ℓ∑
h=1
∂2Xli
∂qh∂t(q, t;λ)ph +
∂2Xli
∂t2(q, t;λ) .
(6.8)
Dimostrazione. Come sopra, la (6.7) segue dal teorema di derivazione difunzioni composte.

6.3. DISTRIBUZIONI DI FORZE 69
6.2. Distribuzioni di masse
La distribuzione di massa di ciascun rigido verra indicata con
ρi(λ) dµi(λ) . (6.9)
Ricordando la convenzione nell’Osservazione 4.11, poniamo la
Definizione 6.7. La funzione
T l(q,p, t) =1
2
n∑
i=1
∫
Λ∗
i
|vli (q,p, t;λ)|2 ρi(λ) dµi(λ) (6.10)
e detta l’energia cinetica in coordinate lagrangiane del sistema.
6.3. Distribuzioni di forze
Definizione 6.8. Introduciamo una distribuzione di forze dF i per ciascunrigido (Ci, ρi),
dF i(ξ1 . . . , ξnc , ξ1, . . . , ξnc , t;λi) , (6.11)
ovedF i : Rnc ×Rnc × I × Λ∗
i → R3 .
Chiamiamo distribuzione di forze in coordinate lagrangiane agenti sul rigido(Ci, ρi) la
dF li(q,p, t;λ
i) = dF i(ξl1(q, t), . . . , ξ
lnc
(q, t),
ℓ∑
h=1
∂ξl1∂qh
(q, t)ph +∂ξl1∂t
(q, t), . . . ,ℓ∑
h=1
∂ξlnc
∂qh(q, t)ph +
∂ξlnc
∂t(q, t), t;λi) ,
(6.12)
condF l
i : Q×Rℓ × I × Λ∗i → R3 .
Saremo interessati soprattutto alle dF li. Si noti che esse dipendono dalle
coordinate λ di ciascun punto solidale con il moto (pensato come punto diapplicazione della forza), dalla configurazione e dall’atto di moto dell’interosistema (Ci, ρi)n
i=1, mediante le q, q = p, oltre che dal tempo t in modoanche esplicito.Nel seguito considereremo solo i casi seguenti:
F.1 forze concentrate in punti isolati;F.2 forze concentrate su curve;F.3 forze concentrate su superfici;F.4 forze distribuite in domini di R3.
Esempio 6.9. 6.F.1, 6.F.2. Asta omogenea soggetta al peso e a una forzaapplicata a una estremita.In questo caso la rappresentazione lagrangiana del moto e
Xl(ϕ;λ(s)) = (s cosϕ, s sinϕ, 0) ,
con s ∈ D = [0, L] e ϕ ∈ (−π, π) coordinata lagrangiana. La parametrizza-zione nel senso della Sottosezione 4.1.4 e
λ(s) = s , s ∈ D .

70 DANIELE ANDREUCCI
Si tratta dunque di un’asta di lunghezza L vincolata a muoversi nel pianofisso x3 = 0 con un estremo nell’origine O. La densita sia data dalla costanteρ0 = m/L, con m massa dell’asta. Con la notazione della Definizione 4.2,possiamo scegliere
XO(t) = 0 , u(t) = cosϕe1 + sinϕe2 . (6.13)
L’asta quindi ha la direzione di u. Il peso, che assumiamo diretto come e2,agisce come
dF lpeso(ϕ, ϕ, t;λ) = ρ0ge2 dµ(λ) .
La forza applicata all’estremo s = L sara data dalla
dF lL = ke3 ∧ uδ(L,0,0)(λ) dλ , (6.14)
ove con δ(L,0,0) indichiamo la massa di Dirac nel punto solidale (L, 0, 0). Sitratta quindi di una forza sempre ortogonale all’asta.Calcoliamo la risultante delle forze date:
F =
∫
Λ∗
dF l
peso + dF lL
=
∫
R
ρ0ge2 dµ(λ) +
∫
R
ke3 ∧ uδ(L,0,0)(λ)
= mge2 + ke3 ∧ u .
Esempio 6.10. 6.F.3. Disco soggetto a forze tangenziali.In questo caso la rappresentazione lagrangiana e
Xl(ϕ;λ(s)) = (s1 cosϕ− s2 sinϕ, s1 sinϕ+ s2 cosϕ, 0) ,
con
s = (s1, s2) ∈ D = s | s21 + s22 ≤ R2 ,e ϕ ∈ (−π, π) coordinata lagrangiana. La parametrizzazione nel senso dellaSottosezione 4.1.4 e
λ(s) = (s1, s2, 0) , s ∈ D .
Si tratta dunque di un disco di raggio R > 0 vincolato a muoversi nel pianofisso x3 = 0, con il centro nell’origine O. Il sistema di riferimento solidale Se (O,uh), con
u1 = cosϕe1 + sinϕe2 ,
u2 = − sinϕe1 + cosϕe2 ,
u3 = e3 .
(6.15)
La forza, se e applicata in un punto, sara per esempio data proprio dalla(6.14). Si noti che puo risultare 0 < L ≤ R, o anche L > R.In alternativa, volendo rappresentare una distribuzione continua di forze suldisco, per esempio proporzionale in modulo alla distanza dal centro, si avra
dF l = kχD(λ1, λ2)δλ3=0u3 ∧Xl dλ1 dλ2 dλ3 ,
ove χD e la funzione caratteristica dell’insieme D.

6.4. L’IPOTESI DEI LAVORI VIRTUALI 71
Calcoliamo il momento di quest’ultima distribuzione di forze, con polo O:
M =
∫
Λ∗
Xl ∧ dF l
=
∫
D
ks1u1 + s2u2 ∧ u3 ∧ [s1u1 + s2u2]ds1 ds2
=
∫
D
k(s21 + s22)u3 ds1 ds2
=π
2kR4u3 .
Esempio 6.11. 6.F.3, 6.F.4. Cubo soggetto al peso e a forze applicate suuna faccia.In questo caso la rappresentazione lagrangiana dei moti solidali con il corporigido e
Xl(ϕ, z;λ(s)) = (s1 cosϕ− s2 sinϕ, s1 sinϕ+ s2 cosϕ, s3 + z) ,
con
s = (s1, s2, s3) ∈ D = [0, L]3 ,
e ϕ ∈ (−π, π), z ∈ R coordinate lagrangiane. La parametrizzazione nelsenso della Sottosezione 4.1.4 e
λ(s) = (s1, s2, s3) , s ∈ D .
Si tratta dunque di un cubo di spigolo L vincolato ad avere uno spigolosull’asse fisso x3, libero di scorrere su di esso, oltre che di ruotare intornoall’asse medesimo. Il sistema di riferimento solidale S e (A,uh), con
XA = ze3 ,
e (uh) come in (6.15). La densita sia data dalla funzione
ρ(λ) = αλ21 ,
con α > 0 costante. Il peso, che assumiamo diretto come −u3, agisce come
dF lpeso(ϕ, ϕ, z, z, t;λ) = −αλ2
1ge3 dµ(λ) .
La distribuzione superficiale di forze sulla faccia λ3 = 0 sia, per β > 0costante,
dF lsup(ϕ, ϕ, z, z, t;λ) = β|z|u1δλ3=0χD(λ) dλ ,
che quindi risulta in pratica una misura di superficie sulla faccia stessa.
6.4. L’ipotesi dei lavori virtuali
Nel caso di sistemi olonomi ‘semplici’, come per esempio un punto vincolatoa una curva, o a una superficie, e facile tradurre nel modello matematicol’idea di vincolo liscio (nel senso di privo di attrito). Si richiede cioe che lareazione vincolare fvin sia perpendicolare al vincolo stesso.Se P e vincolato alla curva γ con terna intrinseca (T ,N ,B) si richiedera
fvin = (fvin ·N )N + (fvin ·B)B , (6.16)

72 DANIELE ANDREUCCI
mentre se P e vincolato alla superficie S di normale ν si richiedera
fvin = (fvin · ν)ν . (6.17)
Nel caso di vincoli piu complessi un approccio diretto ed esplicito di questotipo diviene impraticabile. Si noti anche che le reazioni vincolari non sonoin genere note come funzioni di (x,v, t), ma vanno determinate insieme almoto.Cerchiamo di astrarre dai prossimi esempi una caratteristica dei vincoli lisciutilizzabile per assiomatizzarli.
Esempio 6.12. Un punto P di massa m e vincolato alla curva
γ = ψ(s) | s ∈ J ,
ed e sottoposto alla forza
F (x,v, t) = α1(x,v, t)T + α2(x,v, t)N + α3(x,v, t)B ,
oltre che alla reazione vincolare fvin, che soddisfa la (6.16). Proiettandol’equazione di moto sulla terna intrinseca, si ha (si ricordi che a = sT +s2kN )
ms = α1(x,v, t) , (6.18)
ms2k(s) = α2(x,v, t) + fvin ·N , (6.19)
0 = α3(x,v, t) + fvin ·B . (6.20)
Le funzioni αj possono essere subito espresse come funzioni di s, s, t. Quindila (6.18) e una e.d.o. del secondo ordine nell’incognita s, che, in generale,ha un’unica soluzione che soddisfa le opportune condizioni iniziali.Poi si sostituiranno s = s(t), s = s(t) nelle (6.19)–(6.20), determinando cosıanche fvin.
Esempio 6.13. Un punto P di massa m e vincolato alla superficie sferica
S = Ψ(ϕ, θ) = R(cosϕ sin θ, sinϕ sin θ, cos θ) | ϕ ∈ (−π, π) , θ ∈ (0, π) ,
ed e sottoposto alla forza
F (x,v, t) = α1(x,v, t)T ϕ + α2(x,v, t)T θ + α3(x,v, t)ν ,
oltre che alla reazione vincolare fvin, che soddisfa la (6.17). Qui i due vettori
T ϕ = (− sinϕ, cosϕ, 0) =
∂Ψ∂ϕ∥∥∥∂Ψ∂ϕ
∥∥∥,
T θ = (cosϕ cos θ, sinϕ cos θ,− sin θ) =∂Ψ∂θ∥∥∂Ψ∂θ
∥∥ ,
costituiscono una base ortonormale del piano tangente a S. Scegliamo anchela normale
ν =1
RΨ .

6.4. L’IPOTESI DEI LAVORI VIRTUALI 73
Si verifica mediante derivazione elementare che velocita e accelerazione di Psono date da
v = R sin θϕT ϕ +RθT θ , (6.21)
a = R(2ϕθ cos θ + ϕ sin θ)T ϕ +R(θ − ϕ2 sin θ cos θ)T θ (6.22)
+R(−ϕ2 sin2 θ − θ2)ν .
Proiettando l’equazione di moto sulla terna (T ϕ,T θ,ν), si ha
mR(2ϕθ cos θ + ϕ sin θ) = α1(x,v, t) , (6.23)
mR(θ − ϕ2 sin θ cos θ) = α2(x,v, t) , (6.24)
mR(−ϕ2 sin2 θ − θ2) = α3(x,v, t) + fvin · ν . (6.25)
Di nuovo, gli αj sono esprimibili in funzione di ϕ, θ, ϕ, θ e t, mediante le(6.21) e (6.22). Quindi (6.23)–(6.24) costituiscono un sistema di due equa-zioni in due incognite ϕ, θ che puo in principio essere risolto. Sostituendopoi nella (6.25) si ottiene la fvin.
Osservazione 6.14. Il punto essenziale in entrambi gli esempi 6.12 e 6.13e che nella (6.18), e rispettivamente nelle (6.23)–(6.24), non sono presenticomponenti di fvin. Questo permette di risolvere il problema come indicatosopra.A sua volta questo fatto chiave e conseguenza dell’ipotesi che il vincolo sialiscio.
Esprimiamo questa proprieta fondamentale ancora in un altro modo.Nell’Esempio 6.12 si puo scegliere s come coordinata lagrangiana, ponendo
Xl(s, t;λ) = ψ(s) ,
per cui
(6.16) ⇔ fvin · ∂Xl
∂s= fvin · T = 0 .
Nell’Esempio 6.13 si possono scegliere ϕ, θ come coordinate lagrangiane,ponendo
Xl(ϕ, θ, t;λ) = Ψ (ϕ, θ) ,
per cui
(6.17) ⇔ fvin · ∂Xl
∂ϕ= 0 , fvin · ∂X
l
∂θ= 0 .
Le espressioni come
fvin · ∂Xl
∂s= (ma− F ) · ∂X
l
∂s,
nell’Esempio 6.12, e
fvin · ∂Xl
∂ϕ= (ma− F ) · ∂X
l
∂ϕ,
fvin · ∂Xl
∂θ= (ma− F ) · ∂X
l
∂θ,
nell’Esempio 6.13, si dicono lavori virtuali della reazione vincolare.Nel caso generale poniamo dunque la seguente Definizione.

74 DANIELE ANDREUCCI
Definizione 6.15. Un moto q ∈ C2(I) del sistema vincolato (Ci, ρi) sidice soddisfare l’ipotesi dei lavori virtuali se, per ogni h ∈ 1 , . . . , ℓ, vale
n∑
i=1
∫
Λ∗
i
[al
i (q, q, q, t;λ)ρi(λ) dµi(λ) − dF li(q, q, t;λ)
]
· ∂Xli
∂qh(q, t;λ) = 0 , (6.26)
per ogni t ∈ I (nella (6.26) si denota per brevita q = q(t), q = q(t),q = q(t)).
Esempio 6.16. Consideriamo due punti P1 (di massa m1) e P2 (di massam2) sottoposti al vincolo
x3P1 = x3P2 , (6.27)
e alle forzedF l
1 = αe1 + βe3dµ(λ) , dF l2 = 0 , (6.28)
con α, β ∈ R. Scegliamo come coordinate lagrangiane
x1P1 , x2P1 , x1P2 , x2P2 , x3P1 .
Imporre l’ipotesi dei lavori virtuali (6.26) per le prime quattro coordinateconduce, come e facile verificare, alle
m1x1P1 = α , m1x2P1 = 0 , (6.29)
m2x1P2 = 0 , m2x2P2 = 0 . (6.30)
Invece, imponendo la (6.26) per la quinta coordinata x3P1 si ha
(m1x3P1 − β) + (m2x3P1 − 0) = 0 , ossia (m1 +m2)x3P1 = β . (6.31)
Si noti anche che l’ipotesi dei lavori virtuali—da sola—ha condotto alle(6.29)–(6.31), che sono sufficienti a determinare il moto dei due punti.Scriviamo poi le equazioni di moto (in modo non lagrangiano)
m1a1 = αe1 + βe3 + fvin1 , m2a2 = fvin2 . (6.32)
Confrontando le (6.29)–(6.31) con le (6.32), si ottengono le reazioni vincolaricome
fvin1 = (m1x3P1 − β)e3 = −m2x3P1e3 , fvin2 = −fvin1 .
Tuttavia, l’approccio lagrangiano evita del tutto di considerare in modoesplicito le reazioni vincolari, se si stipula l’ipotesi dei lavori virtuali (cioeche i vincoli siano lisci).
La Definizione 6.15 ci conduce a considerare le quantita introdotte di seguito.
Definizione 6.17. Se dF li e una distribuzione di forze per (Ci, ρi), allora
si definiscono le componenti lagrangiane delle forze come
F lh (q,p, t) =
n∑
i=1
∫
Λ∗
i
∂Xli
∂qh(q, t;λ) · dF l
i(q,p, t;λ) , (6.33)
per ogni h = 1, . . . ℓ. Le F lh risultano funzioni di q ∈ Q, p ∈ Rℓ, t ∈ I.

6.5. FORZE CONSERVATIVE 75
6.5. Forze conservative
Definizione 6.18. Il sistema di componenti lagrangiane delle forze F lhℓ
h=1
si dice conservativo se esiste una funzione Ul ∈ C1(Q× I) tale che
F lh(q,p, t) =
∂Ul
∂qh(q, t) , h = 1 , . . . , ℓ . (6.34)
La funzione Ul si dice potenziale lagrangiano.
In particolare quindi in un sistema conservativo, le F lh non dipendono dalle
q.Consideriamo un esempio significativo.
Esempio 6.19. Il sistema e costituito da due aste rigide C1 e C2, vincolateentrambe al piano fisso x3 = 0, con un estremo nell’origine, parametrizzatein coordinate cartesiane ϕ, θ ∈ (−π, π) da
Xl1(ϕ;λ1(s)) = s cosϕe1 + s sinϕe2 , 0 ≤ s ≤ R1 ,
Xl2(θ;λ
2(σ)) = σ cos θe1 + σ sin θe2 , 0 ≤ σ ≤ R2 .
Ciascun punto di C1 e attratto da ciascun punto di C2 con una forza
−k(Xl
1 −Xl2
),
e viceversa. Qui k > 0 e una costante.Calcoliamo la distribuzione di forze dF l
1. Si ha per λ1 ∈ [0, R1]
dF l1(ϕ, θ;λ
1) = −k∫
Λ∗
2
(Xl
1 −Xl2
)χC2
= k
R2∫
0
[(σ cos θ − s cosϕ)e1 + (σ sin θ − s sinϕ)e2
]dσ
= R2k
[(R2
2cos θ − s cosϕ
)e1 +
(R2
2sin θ − s sinϕ
)e2
].
Nello stesso modo si ottiene
dF l2(ϕ, θ;λ
2) = R1k
[(R1
2cosϕ− σ cos θ
)e1 +
(R1
2sinϕ− σ sin θ
)e2
].
Per esempio si calcola il momento (rispetto all’origine) delle forze su C1∫
Λ∗
1
Xl1 ∧ dF l
1 =k
4R2
1R22 sin(θ − ϕ)e3 .
Introducendo la distribuzione di potenziale
dU(x1,x2;λ1, λ2) = −k
2(x1 − x2)
2χ[0,R1](λ1)χ[0,R2](λ
2) ,
si vede subito che
∇x1 dU(x1,x2;λ1, λ2) = −k(x1 − x2)χ[0,R1](λ
1)χ[0,R2](λ2) ,
cosicche
dF l1(ϕ, θ;λ
1) =
∫
Λ∗
2
∇x1 dU(Xl
1(ϕ;λ1),Xl2(θ;λ
2);λ1, λ2)dλ2 .

76 DANIELE ANDREUCCI
Esercizio 6.20. Determinare le dimensioni fisiche della costante k nell’E-sempio 6.19.
L’idea nell’Esempio 6.19 puo essere generalizzata: la conservativita del si-stema delle componenti lagrangiane delle forze vale se le forze dF i sonoconservative nel senso seguente.
Definizione 6.21. Un sistema di forze dF ini=1 si dice conservativo se
esiste una distribuzione di potenziale
dU(x1, . . . ,xn;λ1, . . . , λn) , xi ∈ R3 , λi ∈ Λ∗i , (6.35)
tale che per ogni i = 1, . . . , n,
dF i(ξ1, . . . , ξnc ;λi) =
∫
Λ∗
1
. . .
∫
Λ∗n
∇xidU
(X1(t;λ
1), . . . ,Xn(t;λn);λ1, . . . , λn)dλi , (6.36)
ove l’integrale e calcolato nelle variabili di integrazione λj , j 6= i; questo eindicato dalla notazione
dλi = dλ1 . . . dλi−1 dλi+1 . . . dλn .
Le componenti lagrangiane delle forze si calcolano infine come derivate del-l’integrale di dU nella corrispondente coordinata lagrangiana, un po’ comela distribuzione dF i e stata ottenuta nella (6.36) come gradiente dell’inte-grale di dU nelle coordinate cartesiane corrispondenti. Tuttavia, nel casodelle componenti lagrangiane, si dovra integrare su tutte le coordinate λi,come risulta dalla Definizione 6.17.
Teorema 6.22. Se il sistema di forze dF ini=1 e conservativo nel senso del-
la Definizione 6.21, il sistema di componenti lagrangiane delle forze F lhℓ
h=1e conservativo nel senso della Definizione 6.18, e i rispettivi potenziali sonocollegati da
Ul(q, t) =
∫
Λ∗
1
. . .
∫
Λ∗
n
dU(Xl
1(q, t;λ1), . . . ,Xl
n(q, t;λn);λ1, . . . , λn), (6.37)
ove l’integrale e calcolato in tutte le variabili λj , j = 1, . . . , n.

6.5. FORZE CONSERVATIVE 77
Dimostrazione. Calcoliamo∂Ul
∂qh=
∫
Λ∗
1
. . .
∫
Λ∗
n
∂
∂qhdU
(Xl
1(q, t;λ1), . . . ,Xl
n(q, t;λn);λ1, . . . , λn)
=
∫
Λ∗
1
. . .
∫
Λ∗n
n∑
i=1
∇xidU · ∂X
li
∂qh(q, t;λi)
=n∑
i=1
∫
Λ∗
i
∫
Λ∗
1
. . .
∫
Λ∗
n
∇xidU dλi
· ∂X
li
∂qh(q, t;λi)
=n∑
i=1
∫
Λ∗
i
dF i(ξl1(q, t), . . . ξ
lnc
(q, t);λi) · ∂Xli
∂qh(q, t;λi)
=
n∑
i=1
∫
Λ∗
i
dF li(q, t;λ) · ∂X
li
∂qh(q, t;λ)
= F lh(q, t) .
Osservazione 6.23. Nelle ipotesi del Teorema 6.22, e se i vincoli sono fissi,il potenziale Ul non dipende in modo esplicito dal tempo t, perche non nedipendono i moti Xl
i .
Esempio 6.24. Tornando all’Esempio 6.19, si calcola
F lϕ(ϕ, θ) =
∫
Λ∗
1
∂Xl1
∂ϕ(ϕ, θ;λ1) · dF l
1(ϕ, θ;λ1)
+
∫
Λ∗
2
∂Xl2
∂ϕ(ϕ, θ;λ2) · dF l
2(ϕ, θ;λ2) =
k
4R2
1R22 sin(θ − ϕ) ,
e infatti
∂
∂ϕ
[− k
2
∫
Λ∗
1
∫
Λ∗
2
(Xl1(ϕ;λ1) −Xl
2(ϕ;λ2))2χ[0,R1](λ1)χ[0,R2](λ
2) dλ1 dλ2
]
=∂
∂ϕ
[− k
2
R31R2 +R1R
32
3+k
4R2
1R22 cos(θ − ϕ)
]
=k
4R2
1R22 sin(θ − ϕ) .


CAPITOLO 7
Equazioni di Lagrange
7.1. Le equazioni di Lagrange
Notazione. In questa Sezione consideriamo un sistema di corpi rigidi sog-getto a vincoli olonomi
(Ci, ρi) | i = 1 , . . . , n ,
ciascuno dei quali e sottoposto alla distribuzione di forze dF i.
Teorema 7.1. Se e soddisfatta l’ipotesi dei lavori virtuali, vale per ognih ∈ 1 , . . . , ℓ
d
dt
[∂T l
∂qh(q(t), q(t), t)
]− ∂T l
∂qh(q(t), q(t), t) = F l
h (q(t), q(t), t) , (7.1)
ove T l e l’energia cinetica data dalla (6.10), mentre F lh e definita dalla
(6.33).
Dimostrazione. A) Per l’ipotesi dei lavori virtuali, e per il Lemma 6.6, siha, per ogni h ∈ 1 , . . . , ℓ fissato,
n∑
i=1
∫
Λ∗
i
[ d
dtvl
i (q(t), q(t), t;λ)]· ∂X
li
∂qh(q(t), t;λ)ρi(λ) dµi(λ)
=
n∑
i=1
∫
Λ∗
i
dF li(q(t), q(t), t;λ) · ∂X
li
∂qh(q(t), t;λ) = F l
h (q(t), q(t), t) . (7.2)
B) Il membro di sinistra della (7.2) si puo riscrivere, usando la regola diLeibniz, come
d
dt
[ n∑
i=1
∫
Λ∗
i
vli (q(t), q(t), t;λ) · ∂X
li
∂qh(q(t), t;λ)ρi(λ) dµi(λ)
]
−n∑
i=1
∫
Λ∗
i
vli (q(t), q(t), t;λ) · d
dt
[∂Xli
∂qh(q(t), t;λ)
]ρi(λ) dµi(λ)
=: J1 − J2 .
(7.3)
79

80 DANIELE ANDREUCCI
C) Ricordando la (6.4), si ha
J1 =d
dt
[ n∑
i=1
∫
Λ∗
i
vli (q(t), q(t), t;λ) · ∂v
li
∂qh(q(t), q(t), t;λ)ρi(λ) dµi(λ)
]
=d
dt
[ ∂
∂qh
n∑
i=1
1
2
∫
Λ∗
i
|vli (q(t), q(t), t;λ)|2 ρi(λ) dµi(λ)
]
=d
dt
[∂T l
∂qh(q(t), q(t), t)
].
(7.4)
Infine
J2 =
n∑
i=1
∫
Λ∗
i
vli (q(t), q(t), t;λ) ·
[ ℓ∑
k=1
∂2Xli
∂qh∂qkqk(t) +
∂2Xli
∂qh∂t
]ρi(λ) dµi(λ)
=
n∑
i=1
∫
Λ∗
i
vli (q(t), q(t), t;λ) · ∂
∂qh
[ ℓ∑
k=1
∂Xli
∂qkqk(t) +
∂Xli
∂t
]ρi(λ) dµi(λ) ,
ove le derivate parziali di Xli in parentesi [. . . ] si intendono calcolate in
(q(t), t;λ).A causa della (6.4) si ha dunque
J2 =
n∑
i=1
∫
Λ∗
i
vli (q(t), q(t), t;λ) · ∂v
li
∂qh(q(t), q(t), t;λ)ρi(λ) dµi(λ)
=∂
∂qh
1
2
n∑
i=1
∫
Λ∗
i
|vli (q(t), q(t), t;λ)|2 ρi(λ) dµi(λ)
=∂T l
∂qh(q(t), q(t), t) .
(7.5)
Raccogliendo le (7.2)–(7.5) si ottiene la tesi (7.1).
7.2. Proprieta dell’energia cinetica
Teorema 7.2. Vale
T l(q,p, t) = T l1 (q,p, t) + T l
2 (q,p, t) ; (7.6)
qui T l2 e la forma quadratica
1
2
ℓ∑
h,k=1
ahk(q, t)phpk , (7.7)
ove
ahk(q, t) :=
n∑
i=1
∫
Λ∗
i
∂Xli
∂qh(q, t;λ)
∂Xli
∂qk(q, t;λ)ρi(λ) dµi(λ) . (7.8)
Invece T l1 e un polinomio di primo grado nelle ph (a coefficienti dipendenti
da q e t).

7.2. PROPRIETA DELL’ENERGIA CINETICA 81
In particolare, se tutti i vincoli sono fissi, T l1 si annulla identicamente,
e le ahk non dipendono da t in modo esplicito (ossia, ne dipendono soloattraverso q).
Dimostrazione. Dalle definizioni (6.10) e (6.4) si ha
T l(q,p, t) =1
2
n∑
i=1
∫
Λ∗
i
∣∣∣∣∣
ℓ∑
h=1
∂Xli
∂qh(q, t;λ)ph +
∂Xli
∂t(q, t;λ)
∣∣∣∣∣
2
ρi(λ) dµi(λ)
=1
2
n∑
i=1
∫
Λ∗
i
ℓ∑
h,k=1
∂Xli
∂qh(q, t;λ)
∂Xli
∂qk(q, t;λ)phpk
+ 2
ℓ∑
h=1
∂Xli
∂qh(q, t;λ)
∂Xli
∂t(q, t;λ)ph
+[∂Xl
i
∂t(q, t;λ)
]2ρi(λ) dµi(λ) ,
(7.9)
da cui segue subito la tesi.
Teorema 7.3. (Teorema fondamentale della meccanica lagran-giana) La matrice (ahk) e simmetrica e definita positiva.
Dimostrazione. La simmetria ahk = akh e una conseguenza immediatadella definizione (7.8).Poi, dato che
T l2 (q,p, t) =
1
2
n∑
i=1
∫
Λ∗
i
∣∣∣∣∣
ℓ∑
h=1
∂Xli
∂qh(q, t;λ)ph
∣∣∣∣∣
2
ρi(λ) dµi(λ) , (7.10)
come segue da (7.9), e ovvio che la matrice (ahk) e almeno semidefinitapositiva.Supponiamo che
T l2 (q,p, t) = 0 , (7.11)
per qualche valore (q,p, t). Dalla (7.10) segue allora che gli integrandilı presenti devono essere nulli, almeno sul dominio Λ(Di), dove la misurad’integrazione non e nulla (si ricordi l’Osservazione 4.11).In particolare, poiche ρi > 0 su Λ(Di),
ℓ∑
h=1
∂Xli
∂qh(q, t;λ)ph = 0 , (7.12)
per ogni i = 1, . . . , n, e per ogni λ ∈ Λ(Di) ⊂ Λ∗i .
Ricordiamo dalle Sezioni 5.1 e 5.2 che, sia nel caso del corpo rigido nondegenere, che in quelli dell’asta rigida e del punto materiale, le coordinatelocali sono scelte tra le coordinate cartesiane di punti in Λ(Di): si vedal’Osservazione 5.2.Quindi tutte le nc coordinate locali del sistema vincolato (ξj) appaiono nelle(7.12), come componenti scalari cartesiane di opportuni moti Xl
i . Piu inparticolare, appaiono le loro derivate nelle qh.

82 DANIELE ANDREUCCI
Raccogliendo tutte le nc equazioni scalari cosı ottenute, si ha il sistemalineare nelle ℓ incognite ph,
ℓ∑
h=1
∂ξj∂qh
(q, t)ph = 0 , j = 1, . . . , nc . (7.13)
La matrice dei coefficienti del sistema e la matrice iacobiana(∂ξj∂qh
)j=1,...,nc ; h=1,...,ℓ
(q, t) , (7.14)
che ha caratteristica massima (pari a ℓ). Quindi l’unica soluzione del sistemalineare omogeneo (7.13) e quella nulla
p = 0 .
Resta cosı dimostrato che T l2 = 0 implica p = 0, e quindi la positivita della
forma quadratica.
Corollario 7.4. Il sistema di equazioni differenziali (7.1), h = 1, . . . , ℓ,si puo scrivere nella forma normale
q = f(q, q, t) . (7.15)
Se i vincoli sono tutti fissi, si ha piu in particolare
q = A(q(t))−1F (q, q, t) + g(q(t), q(t)) , (7.16)
ove F = (F lh ), A = (ahk), e ciascun elemento del vettore g e una forma
quadratica nelle q.
Dimostrazione. Osserviamo che ciascuna delle (7.1) si puo scrivere come
d
dt
[ ℓ∑
k=1
ahk(q(t), t)qk(t) +∂T l
1
∂qh(q(t), t)
]= fh(q(t), q(t), t) , (7.17)
ove si definisce
fh(q(t), q(t), t) :=∂T l
∂qh(q(t), q(t), t) + F l
h(q(t), q(t), t) .
E essenziale che il termine∂T l
1
∂qh(q(t), t)
non dipenda dalle q; questo e vero perche T l1 e lineare nelle q. Infatti allora
le (7.17) si riscrivono come
ℓ∑
k=1
ahk(q(t), t)qk
= −ℓ∑
k=1
d
dt
[ahk(q(t), t)
]qk −
d
dt
[∂T l1
∂qh(q(t), t)
]+ fh(q(t), q(t), t) . (7.18)
Il termine di destra nella (7.18) dipende solo da q, q, t. D’altra parte, datoche la matrice (ahk) e definita positiva, ha determinante diverso da zero,e quindi le (7.18) costituiscono un sistema lineare nelle incognite q, la cuimatrice dei coefficienti e non singolare. Per la regola di Cramer, segue subitola (7.15).

7.3. CONDIZIONI INIZIALI 83
Se infine i vincoli sono tutti fissi, T l1 = 0, e dalla definizione delle fh segue
che
ℓ∑
k=1
ahk(q(t))qk
=
ℓ∑
k,j=1
[∂akj
∂qh(q(t)) − ∂ahk
∂qj(q(t))
]qj qk + F l
h(q(t), q(t), t) . (7.19)
Risolvendo le (7.19) rispetto a q segue la (7.16).
Dai teoremi elementari sulle e.d.o. si ha allora
Corollario 7.5. Se la f di (7.15) e continua in tutte le variabili e di classeC1 in (q, q), il problema di Cauchy per (7.15) ha un’unica soluzione locale.
Le ipotesi di regolarita del Corollario 7.5 sono verificate se per esempio leXl
j e le F lh sono di classe C3.
Osservazione 7.6. Il fatto che il sistema delle equazioni di Lagrange possaessere normalizzato implica che si possono definire per il sistema, appuntoin tale forma normalizzata, i concetti di punti di equilibrio e di stabilita vistinel Capitolo 1.
7.3. Condizioni iniziali
Nel formalismo lagrangiano le condizioni iniziali per le equazioni di moto,ossia per il sistema (7.15), si riducono con estrema immediatezza a
q(0) = q0 ∈ Q , q(0) = q0 ∈ Rℓ . (7.20)
Questo (che e uno dei vantaggi dell’uso delle coordinate lagrangiane) avvieneperche la parametrizzazione lagrangiana tiene conto per costruzione di tuttii vincoli.I valori iniziali espressi in coordinate locali ξ(0) e ξ(0) invece non possonoessere scelti in modo indipendente.
Osservazione 7.7. Se infatti torniamo alla descrizione del sistema vin-colato della Sezione 5.3, e deriviamo in t le (5.23), otteniamo per ognij ∈ 1, . . . ,m
∇ξ fj(ξ(t), t) · ξ(t) +∂fj
∂t(ξ(t), t) =
nc∑
k=1
∂fj
∂ξk(ξ(t), t)ξk(t) +
∂fj
∂t(ξ(t), t) = 0 . (7.21)
Queste equazioni costituiscono, anche per t = 0, un sistema lineare (in generenon omogeneo) di m equazioni nelle nc incognite scalari ξk, la cui matrice deicoefficienti coincide con la matrice iacobiana del sistema di vincoli fj (vedila Definizione 5.3). Quindi la sua caratteristica e massima e uguale a m. Lospazio delle soluzioni del sistema ha pertanto dimensione nc −m = ℓ.

84 DANIELE ANDREUCCI
Usando la parametrizzazione lagrangiana denotiamo
F =(∂fj
∂ξk
), G =
(∂ξlj∂qh
).
Allora vale
ξ(t) = G(t)q(t) +∂ξl
∂t, (7.22)
cosicche il sistema (7.21) si puo riscrivere come
F ξ = FGq + F∂ξl
∂t= −
(∂fj
∂t
), (7.23)
che e sempre soddisfatto perche per ogni j ∈ 1, . . . ,mfj
(ξl(q(t), t), t
)= 0 , t ∈ I .
7.4. Il caso conservativo. La funzione lagrangiana
Definizione 7.8. Se il sistema di componenti lagrangiane delle forze F lhℓ
h=1e conservativo, nel senso della Definizione 6.18, si definisce funzione lagran-giana del sistema (Ci, ρi)n
i=1 la funzione L definita da
L(q,p, t) := T l(q,p, t) + Ul(q, t) . (7.24)
Qui q ∈ Q, q ∈ Rℓ, t ∈ I.
Teorema 7.9. Se il sistema di componenti lagrangiane delle forze F lhℓ
h=1e conservativo, le equazioni di Lagrange (7.1) si possono riscrivere come
d
dt
[ ∂L∂qh
(q, q, t)]− ∂L∂qh
(q, q, t) = 0 , (7.25)
per h = 1, . . . , ℓ.
Dimostrazione. Basta partire dalle (7.1), usare la definizione di L, eosservare che
∂L∂qh
(q, q, t) =∂T l
∂qh(q, q, t) . (7.26)
Osservazione 7.10. Se i vincoli sono fissi, e le forze sono conservative, laL non dipende esplicitamente dal tempo, ossia
∂L∂t
(q, q, t) = 0 ,
per ogni q ∈ Q, q ∈ Rℓ, t ∈ I. Questo segue dall’Osservazione 6.23 e dalTeorema 7.2.
7.4.1. Conservazione dell’energia.
Definizione 7.11. Definiamo la funzione hamiltoniana
H(q,p, t) =ℓ∑
h=1
∂L∂qh
(q,p, t)ph − L(q,p, t) , (7.27)
per q ∈ Q, p ∈ Rℓ, t ∈ I.

7.4. IL CASO CONSERVATIVO. LA FUNZIONE LAGRANGIANA 85
Lemma 7.12. Se q ∈ C2(I) e una soluzione delle equazioni di Lagrange,allora
d
dtH(q, q, t) = −∂L
∂t(q, q, t) , t ∈ I . (7.28)
Nella (7.28) e sottintesa la dipendenza di q e q da t.Si osservi in particolare che la derivata in (7.28) non dipende da q.
Dimostrazione. Si calcola, usando le (7.25),
d
dtH =
ℓ∑
h=1
d
dt
[ ∂L∂qh
]qh +
∂L∂qh
qh − ∂L∂qh
qh − ∂L∂qh
qh
− ∂L∂t
=ℓ∑
h=1
∂L∂qh
qh − ∂L∂qh
qh
− ∂L∂t
= −∂L∂t
.
Vediamo come, nel caso dei vincoli fissi, la (7.28) implichi la conservazionedell’energia.
Proposizione 7.13. Assumiamo che le forze dF ini=1 siano conservative
e che i vincoli siano fissi. Allora H non dipende esplicitamente dal tempo, e
H(q,p) = T l(q,p) − Ul(q) . (7.29)
Dimostrazione. Intanto osserviamo che, essendo i vincoli fissi, ne T l neL dipendono esplicitamente dal tempo, per l’Osservazione 7.10. Poi, dalladefinizione (7.27) segue
H =
ℓ∑
h=1
∂L∂qh
ph − L =
ℓ∑
h=1
∂T l
∂qhph − T l − Ul
=ℓ∑
h,k=1
ahk(q)phpk −1
2
ℓ∑
h,k=1
ahk(q)phpk − Ul
=1
2
ℓ∑
h,k=1
ahk(q)phpk − Ul = T l − Ul .
Teorema 7.14. Assumiamo che le forze dF ini=1 siano conservative e che
i vincoli siano fissi. Sia q ∈ C2(I) una soluzione delle equazioni di Lagrange.Allora esiste una costante E tale che
T l(q(t), q(t)) − Ul(q(t)) = E , t ∈ I . (7.30)
Dimostrazione. Per la Proposizione 7.13, e per il Lemma 7.12, si ha
d
dt
[T l − Ul
]=
d
dtH = −∂L
∂t= 0 , t ∈ I .

86 DANIELE ANDREUCCI
7.4.2. Stabilita dell’equilibrio.
Teorema 7.15. Assumiamo che le forze dF ini=1 siano conservative, che
i vincoli siano fissi, che qeq ∈ Q sia un punto di massimo isolato per Ul.Allora qeq e un punto di equilibrio stabile.
Dimostrazione. Richiamata l’Osservazione 7.6, notiamo che dalla (7.16)segue che, in vista della
(F lh (qeq)) = ∇Ul(qeq) = 0 ,
il punto qeq e in effetti di equilibrio.La funzione
W = H + Ul(qeq)
e una funzione di Liapounov per il sistema delle equazioni di Lagrange, nelsenso della Definizione 1.17, ove si ricordi anche l’Osservazione 1.18. Infattila regolarita segue dalle ipotesi generali stipulate. La positivita segue dalfatto che Ul(q) < Ul(qeq) per ogni q 6= qeq in un intorno opportuno di qeq,oltre che dal Teorema 7.3 (vedi anche la dimostrazione del Teorema 1.24).Infine la proprieta di monotonia lungo le soluzioni del sistema differenzialee implicata dal Teorema 7.14.Dunque si applica il Teorema 1.19 e se ne deduce la stabilita cercata.
7.4.3. Le coordinate cicliche e i relativi integrali primi.
Definizione 7.16. Una coordinata lagrangiana qh si dice ciclica se
∂L∂qh
(q,p, t) = 0 , (7.31)
per ogni valore di q ∈ Q, p ∈ Rℓ, t ∈ I.
Proposizione 7.17. Se qh e una coordinata ciclica, allora vale l’integraleprimo del moto:
∂L∂qh
(q(t), q(t), t) =∂L∂qh
(q(0), q(0), 0) , t ∈ I . (7.32)
Dimostrazione. Ovvia per le equazioni di Lagrange (7.25).
7.5. Piccole oscillazioni
Notazione. Supponiamo qui che i vincoli siano tutti fissi e che il sistemadi forze dF in
i=1 sia conservativo nel senso della Definizione 6.21.
Sia qeq ∈ Q un punto di equilibrio stabile, ove
∇Ul(qeq) = 0 , (7.33)
D2Ul(qeq) sia definita negativa. (7.34)
Allora il potenziale Ul in un intorno di qeq si puo approssimare con il suopolinomio di Taylor di secondo grado
U∗(q) = Ul(qeq) +1
2(q − qeq)
tD2Ul(qeq)(q − qeq)
= Ul(qeq) +1
2
ℓ∑
h,k=1
∂2Ul
∂qh∂qk(qeq)(qh − qeqh)(qk − qeqk) .
(7.35)

7.5. PICCOLE OSCILLAZIONI 87
A sua volta l’energia cinetica si puo approssimare con
T ∗(q) = T l(qeq, q) =1
2
ℓ∑
h,k=1
ahk(qeq)qhqk . (7.36)
Nel seguito assumeremo cheqeq = 0 ,
eUl(qeq) = 0 ,
il che si puo sempre ottenere con ovvie traslazioni. Avremo quindi
U∗(q) =1
2qtD2Ul(0)q =
1
2
ℓ∑
h,k=1
∂2Ul
∂qh∂qk(0)qhqk , (7.37)
T ∗(q) =1
2qtAq =
1
2
ℓ∑
h,k=1
ahk(0)qhqk , (7.38)
dove abbiamo posto appunto A = (ahk(0)).
Definizione 7.18. Si definisce lagrangiana ridotta la funzione
L∗(q, q) = T ∗(q) + U∗(q) , q , q ∈ Rℓ . (7.39)
Si definiscono piccole oscillazioni i moti relativi alla lagrangiana ridotta,ossia le soluzioni delle
d
dt
∂L∗
∂qh− ∂L∗
∂qh= 0 , h = 1, . . . , ℓ , (7.40)
che si dicono equazioni delle piccole oscillazioni.
Osservazione 7.19. Il sistema differenziale (7.40), ricordando le (7.37),(7.38), si puo riscrivere come
ℓ∑
k=1
[ahk qk − Uhkqk
]= 0 , (7.41)
ove si sottintende ahk = ahk(0) e si e posto
Uhk =∂2Ul
∂qh∂qk(0) , U = (Uhk) .
Si tratta dunque di un sistema lineare del secondo ordine a coefficienticostanti. In forma vettoriale
Aq − Uq = 0 . (7.42)
Teorema 7.20. Esistono coordinate lagrangiane λ ∈ Rℓ tali che in questecoordinate le (7.40) assumono la forma
λh + ω2hλh = 0 , h = 1, . . . , ℓ , (7.43)
per opportuni reali ωh > 0, e la L∗ assume la forma
L∗(λ, λ) =1
2
ℓ∑
h=1
[λ2
h − ω2hλ
2h
]. (7.44)

88 DANIELE ANDREUCCI
Dimostrazione. E chiaro che la (7.43) segue dalla (7.44), quindi basteradimostrare quest’ultima, il che si riduce a diagonalizzare due forme quadra-tiche con il medesimo cambiamento di variabili.A) Diagonalizziamo A. Essendo questa una matrice simmetrica, per ilLemma 4.30 esiste una matrice B con
BBt = BtB = I ,
tale che
BtAB = diag(α1, . . . , αℓ) .
Gli scalari αh devono essere positivi, perche A e definita positiva: per h ∈1, . . . , ℓ
αh = eht(BtAB)eh = (Beh)tA(Beh) > 0 .
B) Normalizziamo T ∗. Definiamo nuove (provvisorie) coordinate µ ∈ Rℓ,mediante la
q = BNµ ,
con
N = diag( 1√
α1, . . . ,
1√αℓ
).
Allora
1
2qtAq =
1
2µtN tBtABN µ =
1
2µtN diag(α1, . . . , αℓ)N µ =
1
2µtIµ =
1
2|µ|2 . (7.45)
C) Diagonalizziamo D2Ul(0). Nelle coordinate µ la U∗ diviene
1
2µtN tBtD2Ul(0)BNµ =:
1
2µtDµ . (7.46)
Si verifica subito che D e simmetrica, perche D2Ul(0) lo e:
Dt = (N tBtD2Ul(0)BN )t= N tBtD2Ul(0)
tBN = D .
Si puo quindi ancora invocare il Lemma 4.30 per trovare una matrice C taleche
CCt = CtC = I ,
e che
CtDC = diag(β1, . . . , βℓ) .
Gli scalari βh devono essere negativi, perche D2Ul(0) e definita negativa:per h ∈ 1, . . . , ℓ
βh = eht(CtDC)eh = eh
tCtN tBtD2Ul(0)BNCeh =
(BNCeh)tD2Ul(0)(BNCeh) < 0 .
Possiamo quindi scrivere
βh = −ω2h ,
con ωh > 0.D) Cambiamento finale di coordinate. Le nuove coordinate lagrangianesaranno date da
µ = Cλ ,

7.6. LAGRANGIANE EQUIVALENTI 89
ossia
λ = Ctµ = CtN−1Btq .
In queste coordinate la U∗ e data da (vedi la (7.46))
1
2λtCtDCλ =
1
2λt diag(−ω2
1, . . . ,−ω2ℓ )λ = −1
2
ℓ∑
h=1
ω2hλ
2h .
Inoltre, per la (7.45), la T ∗ diviene
1
2|µ|2 =
1
2µtµ =
1
2λ
tCtCλ =
1
2λ
tIλ =
1
2|λ|2 .
Definizione 7.21. Le coordinate λh si dicono coordinate normali. Le ωh/2πsi dicono frequenze normali.
Osservazione 7.22. Le frequenze normali si possono determinare anchesenza operare di fatto le trasformazioni di coordinate viste nella dimostra-zione del Teorema 7.20.Cerchiamo soluzioni del sistema (7.40) che abbiano frequenza ω/2π, ossiache abbiano la forma
q(t) = x cos(ωt) (7.47)
per un’opportuna scelta del vettore costante x ∈ Rℓ, x 6= 0. Una sostitu-zione diretta di quest’espressione nella (7.42) conduce a
−(ω2A + U)x cos(ωt) = 0 ,
che, a causa della x 6= 0, puo valere solo se
det(ω2A + U) = 0 . (7.48)
La (7.48) ha per soluzioni i quadrati delle ωh, h = 1, . . . , ℓ.
Esercizio 7.23. Determinare la relazione tra i vettori x nella (7.47) e la ma-trice che opera il cambiamento di coordinate da λ a q, ossia, nella notazionedella dimostrazione del Teorema 7.20, la BNC.
7.6. Funzioni lagrangiane diverse che conducono alle stesse
equazioni di Lagrange
E possibile che due funzioni lagrangiane diverse conducano alle stesse equa-zioni di moto.
Teorema 7.24. Se le due funzioni lagrangiane L1 e L2 soddisfano
L2(q, q, t) = L1(q, q, t) +d
dtF (q, t) , (7.49)
con F ∈ C2(Rℓ+1), allora conducono alle stesse equazioni di Lagrange.
Dimostrazione. Anzitutto si noti che la (7.49) si puo riscrivere come
L2 = L1 +
ℓ∑
k=1
∂F
∂qkqk +
∂F
∂t.

90 DANIELE ANDREUCCI
Si ha quindi per h = 1, . . . , ℓ:
d
dt
[ ∂
∂qh(L2 − L1)
]− ∂
∂qh(L2 − L1) =
d
dt
[ ∂F∂qh
]−
ℓ∑
k=1
∂2F
∂qk∂qhqk − ∂2F
∂t∂qh= 0 .
Esempio 7.25. Sia (O,ei) il sistema di riferimento fisso, e sia−−→OP = x1e1 + x3e3 ,
ove P e un punto di massa m. P e vincolato a una circonferenza di raggioR e centro A, giacente sul piano x2 = 0.A sua volta, A e vincolato ad appartenere all’asse x3, ma e mobile su taleasse, con moto −→
OA = −ct2e3 ,
con c costante positiva.Su P agisce la forza peso
−mge3 .
Scriviamo le equazioni di Lagrange di P .A) Prima usiamo il sistema di riferimento fisso. Scegliamo come coordinata
lagrangiana l’angolo ϕ tra−→AP e e1. Indichiamo anche
z(t) = −ct2 .Dunque −−→
OP = (R cosϕ, 0, z(t) +R sinϕ) .
Dato che le forze sono conservative con potenziale
U = −mgx3 ,
si puo scrivere
L1 =1
2m|v|2 −mgx3 .
Mav = (−Rϕ sinϕ, 0, z(t) +Rϕ cosϕ) ,
e pertanto
|v|2 = z(t)2 +R2ϕ2 + 2Rz(t)ϕ cosϕ .
Percio
L1 =1
2m
[z(t)2 +R2ϕ2 + 2Rz(t)ϕ cosϕ
]−mgz(t) −mgR sinϕ .
Il sistema ha un grado di liberta, quindi le equazioni di Lagrange si riduconoalla
d
dtm
[R2ϕ+Rz(t) cosϕ
]+mRz(t)ϕ sinϕ+mgR cosϕ = 0 .
B) Ricalcoliamo la lagrangiana nel sistema di riferimento mobile S = (A,ei).La coordinata lagrangiana e ancora la ϕ come sopra. Si ha
−→AP = (R cosϕ, 0, R sinϕ) ,

7.6. LAGRANGIANE EQUIVALENTI 91
e quindi
TS =1
2mR2ϕ2 .
Sul punto agiscono il peso e la forza di trascinamento
F t = −maA = 2ce3 .
Quindi il potenziale delle forze applicate a P e
US = m(2c − g)x3 .
Pertanto la lagrangiana risulta ora
L2 =1
2mR2ϕ2 +m(2c− g)R sinϕ .
Si noti che
L2 − L1 = −1
2m(z(t)2 + 2Rz(t)ϕ cosϕ) +mgz(t) + 2mcR sinϕ
= −1
2mz(t)2 +mgz(t) −mR(z(t)ϕ cosϕ+ z(t) sinϕ)
=d
dt
t∫
0
− 1
2mz(τ)2 +mgz(τ)
dτ +
d
dtmR
[z(t) sinϕ
],
e quindi le due lagrangiane differiscono per una derivata totale nel tempo,come nel Teorema 7.24.


CAPITOLO 8
Moti di precessione
Notazione. In questo capitolo consideriamo un corpo rigido non degenere(C, ρ), con un punto fisso O.Il punto fisso O verra assunto sia come origine del sistema di riferimentofisso che di quello solidale; ossia assumeremo
XO(t) = 0 , per ogni t.
Salvo indicazione contraria, si assumera O come polo per il tensore d’inerziaσ, e per i momenti delle quantita di moto e delle forze.Le coordinate lagrangiane q = (q1, q2, q3) saranno quindi (localmente) incorrispondenza biunivoca con le posizioni della terna ortonormale solidale(uh); denotiamo le corrispondenti funzioni Q→ R3 come
q 7→ ulh(q) .
8.1. La seconda equazione cardinale
Definizione 8.1. Il momento delle forze applicate al rigido e
M ext(q(t), q(t), t) =
∫
R3
Xl(q(t);λ) ∧ dF l(q(t), q(t), t;λ) . (8.1)
Stabiliamo il risultato principale di questo Capitolo.
Teorema 8.2. Se e verificata l’ipotesi dei lavori virtuali (6.26), allora valeper ogni t ∈ I
dJO
dt(t) = M ext(q(t), q(t), t) . (8.2)
Dimostrazione. Fissiamo t ∈ I; anche q(t) e q(t) risultano quindi fissati.La tesi consiste nell’ultima uguaglianza in
dJO
dt(t) =
d
dt
∫
R3
Xl ∧ vlρ(λ) dλ =
∫
R3
Xl ∧ alρ(λ) dλ =
∫
R3
Xl ∧ dF l .
Qui e nel resto della dimostrazione omettiamo per semplicita gli argomentiq, q, . . . .L’informazione che abbiamo a disposizione consiste nelle tre condizioni sca-lari dell’ipotesi dei lavori virtuali (6.26), che possono essere riscritte in modoequivalente come
3∑
h=1
∫
R3
al · ∂Xl
∂qhµhρ(λ) dλ =
3∑
h=1
∫
R3
dF l · ∂Xl
∂qhµh , (8.3)
93

94 DANIELE ANDREUCCI
ove (µh) ∈ R3 puo essere scelto ad arbitrio. Per il Lemma 8.3, ove si prendeq0 = q(t), fissato un qualunque g, si puo scegliere un (µh) ∈ R3 tale che
g ∧Xl(q(t);λ) =
3∑
h=1
∂Xl
∂qh(q(t);λ)µh .
Si noti che g e (µh) sono indipendenti da λ. Quindi per la (8.3)∫
R3
al · g ∧Xlρ(λ) dλ =
∫
R3
dF l · g ∧Xl .
Per il Lemma A.6 questo implica∫
R3
Xl ∧ alρ(λ) dλ · g =
∫
R3
Xl ∧ dF l · g ,
e infine per l’arbitrarieta di g,∫
R3
Xl ∧ alρ(λ) dλ =
∫
R3
Xl ∧ dF l .
La (8.2) e nota come seconda equazione cardinale.
Lemma 8.3. Sia q0 ∈ Q fissato. Per ogni g ∈ R3 esiste (µ1, µ2, µ3) ∈ R3
tale che3∑
h=1
∂Xl
∂qh(q0;λ)µh = g ∧Xl(q0;λ) , per ogni λ ∈ R3. (8.4)
Il Lemma 8.3 e stabilito qui per comodita di riferimento, ma e in realta ovvioper i risultati del Capitolo 2.
Dimostrazione. Per il Teorema 2.24 il sistema
duh
dτ(τ) = g ∧ uh(τ) , τ ∈ R ,
uh(0) = ulh(q0) ,
ha un’unica soluzione uh. Indichiamo con q(τ) le coordinate lagrangianecorrispondenti alla posizione di (uh(τ)), cosicche
ulh(q(τ)) = uh(τ) , q(0) = q0 .
Ne segue che
d
dτXl(q(τ);λ) =
d
dτ
3∑
h=1
λhulh(q(τ))
=
3∑
h=1
λhg ∧ ulh(q(τ)) = g ∧Xl(q(τ);λ) . (8.5)
D’altronde
d
dτXl(q(τ);λ) =
3∑
h=1
∂Xl
∂qh(q(τ);λ)
dqhdτ
(τ) . (8.6)

8.3. LE PRECESSIONI PER INERZIA 95
La tesi segue subito da (8.5) e (8.6), ponendovi τ = 0 e quindi
µh =dqhdτ
(0) .
8.2. Le equazioni di Eulero
Dal Teorema 8.2 e dalla (4.21) segue subito
Corollario 8.4. Vale per ogni precessione
σω + ω ∧ σω = M ext . (8.7)
In forma scalare, assumendo che la terna (uh) sia principale d’inerzia, eponendo
ωh = ω · uh , M exth = M ext · uh ,
la (8.7) diviene
I11ω1 = (I22 − I33)ω2ω3 +M ext1 , (8.8)
I22ω2 = (I33 − I11)ω1ω3 +M ext2 , (8.9)
I33ω3 = (I11 − I22)ω1ω2 +M ext3 . (8.10)
La (8.7), e le (8.8)—(8.10), si dicono equazioni di Eulero.
Osservazione 8.5. Dalla definizione di ω segue subito che ω si puo espri-mere in funzione delle q e q. La stessa cosa vale per le M ext
h . Quindi, ingenere, il sistema (8.8)—(8.10) e un sistema del secondo ordine nelle q (peril quale si puo dimostrare un teorema di esistenza e unicita di soluzioni, unavolta prescritti i dati iniziali q(0) e q(0)).Tuttavia, in alcuni casi risulta possibile e conveniente considerarlo un siste-ma del primo ordine nelle ωh.
8.3. Le precessioni per inerzia
Definizione 8.6. Una precessione si dice per inerzia se
M ext(q(t), q(t), t) = 0 , per ogni t. (8.11)
Osservazione 8.7. Nel caso delle precessioni per inerzia le equazioni diEulero (8.8)—(8.10) prendono la forma
I11ω1 = (I22 − I33)ω2ω3 , (8.12)
I22ω2 = (I33 − I11)ω1ω3 , (8.13)
I33ω3 = (I11 − I22)ω1ω2 . (8.14)
Questo e un sistema del primo ordine nelle ωh, che si puo risolvere in modounico una volta prescritte le condizioni iniziali ωh(0).
Teorema 8.8. In una precessione per inerzia valgono i due integrali primidel moto:
JO(t) = σω(t) = JO(0) , (8.15)
T (t) =1
2σω(t) · ω(t) = T (0) , (8.16)

96 DANIELE ANDREUCCI
per ogni t.
Dimostrazione. A) La (8.15) segue subito dalla (8.2) e dalla (8.11).B) Si ha per ogni t
dT
dt=
d
dt
1
2σω · ω =
d
dt
1
2
3∑
h=1
Ihhω2h =
3∑
h=1
Ihhωhωh .
Moltiplichiamo poi ciascuna delle (8.12), (8.13), (8.14) per la corrispondenteωh e sommiamo le tre equazioni cosı ottenute. Si ha
3∑
h=1
Ihhωhωh =(I22 − I33) + (I33 − I11) + (I11 − I22)
ω1ω2ω3 = 0 .
Segue la (8.16).
Definizione 8.9. L’insieme ESc dei punti λ = (λh) ∈ R3 che soddisfano
1
2
3∑
h=1
Ihhλ2h = c2 , (8.17)
ove c > 0 e una costante positiva fissata ad arbitrio, si dice ellissoide d’inerziasolidale.
Definizione 8.10. La superficie (mobile)
Ec(t) =X (t;λ) =
3∑
h=1
λhuh(t) | λ ∈ ESc
, (8.18)
si dice ellissoide d’inerzia del corpo rigido (C, ρ), di centro O.
Osservazione 8.11. ESc si puo considerare come l’immagine di Ec nel siste-
ma di riferimento solidale.
Osservazione 8.12. Dalla Definizione 8.10 l’ellissoide d’inerzia Ec(t) risultasubito essere una superficie composta di punti solidali con (C, ρ). La suaequazione nelle coordinate del sistema di riferimento fisso contiene pertantodei coefficienti dipendenti dal tempo. Infatti, sia
x =
3∑
h=1
xheh =
3∑
h=1
λhuh ,
con le λh come in (8.18). Allora, all’istante t, si ha
1
2σx · x =
1
2
3∑
h,k=1
Ihk(t)xhxk
=1
2
3∑
h,k=1
σuh · ukλhλk =1
2
3∑
h=1
Ihhλ2h = c2 , (8.19)
ove (Ihk(t)) e la matrice che rappresenta σ nella base fissa (eh) all’istante t.La (8.19) e l’equazione dell’ellissoide nel sistema di riferimento fisso.
Lemma 8.13. In ciascun punto x ∈ Ec(t) la direzione normale all’ellissoidee data da σx.

8.3. LE PRECESSIONI PER INERZIA 97
Dimostrazione. Basta osservare che Ec(t) e una superficie di livello dellafunzione
F (x) =1
2
3∑
h,k=1
Ihk(t)xhxk ,
il cui gradiente e (vedi il Teorema A.20)
∇F (x) =
3∑
k=1
∂F
∂xk
ek =
3∑
k=1
[ 3∑
h=1
Ihk(t)xh
]ek = σx .
Teorema 8.14. (Moto alla Poinsot) In una precessione per inerzial’ellissoide d’inerzia Ec(t) si muove mantenendosi tangente a un piano fissoΠ.Il moto e di rotolamento puro, ossia il punto di contatto ha velocita nulla.
L’ultima affermazione del Teorema 8.14 in termini piu dettagliati si puo riformulare come:per ogni t, il moto X (·; λ) tale che X (t; λ) e il punto di contatto, soddisfa
∂X
∂t(t; λ) = 0 .
Dimostrazione. Possiamo supporre com’e ovvio che il moto non si riducaalla quiete, ossia che T (t) > 0.Ricordiamo che JO e un vettore costante, per l’integrale primo del moto(8.15). Cerchiamo il piano fisso Π tra quelli di equazione
x · JO = µ ,
con µ costante da determinare (in dipendenza, tra l’altro, di c).Se Ec(t) deve essere tangente a Π, nel punto di contatto x0(t) deve valere
σx0(t) = τ(t)JO ,
con τ(t) ∈ R da determinare. La relazione (si veda la (4.21))
σω(t) = JO ,
insieme con la non singolarita della σ, implica che
x0(t) = τ(t)ω(t) . (8.20)
Resta da imporre che x0(t) appartenga sia a Ec(t) che a Π. Intanto x0(t) ∈Ec(t) se e solo se
c2 =1
2σx0(t) · x0(t) =
1
2σ[τ(t)ω(t)] · [τ(t)ω(t)]
= τ(t)21
2σω(t) · ω(t) = τ(t)2T (t) = τ(t)2T (0) ,
per l’integrale primo (8.16). Percio τ(t) e in realta costante e vale
τ(t) =c√T (0)
.
Avendo cosı determinato x0(t) in modo univoco, resta da vedere se x0(t) ∈Π, il che equivale a
x0(t) · JO = µ ,

98 DANIELE ANDREUCCI
e puo essere ottenuto scegliendo
µ = τ(t)ω(t) · σω(t) = 2c√T (0)
T (0) = 2c√T (0) .
Si noti che µ e quindi Π sono in effetti costanti in t.Infine dobbiamo dimostrare che il punto solidale che occupa la posizione dicontatto x0(t) nell’istante t, ha velocita nulla in tale istante. Questa velocitae data dalla velocita di trascinamento
ω(t) ∧ x0(t) = ω(t) ∧ τ(t)ω(t) = 0 .
Osservazione 8.15. In genere il punto di contatto tra Ec(t) e il piano fissonon e costante ne nel sistema di riferimento solidale, ne in quello fisso. Inaltri termini, posto
x0(t) =
3∑
h=1
xh0(t)eh =
3∑
h=1
λh0(t)uh(t) , (8.21)
ne le xh0, ne le λh0 risultano costanti. Questo fatto del resto e ovvio per(8.20).Si noti che
3∑
h=1
xh0(t)eh | t ∈ I
(8.22)
e una curva che giace su Π, mentre(λ10(t), λ20(t), λ30(t)) | t ∈ I
(8.23)
e una curva che giace su ESc . Si veda anche la Figura 8.1.
Definizione 8.16. La curva in (8.22) si dice erpoloide, mentre quella in(8.23) si dice poloide.
Esercizio 8.17. Stabilire in quale verso vengono percorse le poloidi dellaFigura 8.1.
Esercizio 8.18. Mostrare, usando le equazioni di Eulero, che nel caso del-l’ellissoide sferico I11 = I22 = I33, tutte le poloidi (e tutte le erpoloidi) siriducono a punti.
8.3.1. Equazioni in coordinate delle poloidi. Le coordinate solidali(λh0) delle poloidi soddisfano, per i due integrali primi nel Teorema 8.8, eper le definizioni nella dimostrazione del Teorema 8.14, le
I211λ
210 + I2
22λ220 + I2
33λ230 = c2
|JO|2T (0)
, (8.24)
I11λ210 + I22λ
220 + I33λ
230 = 2c2 . (8.25)
La (8.25) in particolare esprime l’appartenenza di (λh0) a ESc .
Esercizio 8.19. Si dimostri usando le (8.24)–(8.25) che, nel caso dell’ellis-soide di rotazione I11 = I22 < I33, tutte le poloidi sono circonferenze con ilcentro sull’asse di rotazione, a eccezione dei due vertici posti su tale asse.

8.3. LE PRECESSIONI PER INERZIA 99
λ1
λ2
λ3
b
b
u
u
b
b
Figura 8.1. Alcune poloidi disegnate nel caso dell’ellissoidenon di rotazione avente semiassi nei rapporti a1 = 2a2 = 4a3.Si notino le 4 poloidi limite che dividono le poloidi che circon-dano l’asse minimo da quelle che circondano l’asse massimo.Sono segnati anche i vertici dell’ellissoide, corrisponden-ti a rotazioni uniformi, stabili (vertici sull’asse minimo emassimo) e instabili (vertici sull’asse medio).
8.3.2. Rotazioni per inerzia.
Teorema 8.20. Tra le precessioni per inerzia ci sono le rotazioni uniformiintorno agli assi principali d’inerzia.Queste sono le uniche rotazioni per inerzia.
Dimostrazione. La prima parte dell’enunciato segue subito dalle (8.12)–(8.14).Per dimostrare la seconda parte, osserviamo che se
ω(t) = ω(t)u ,
con u versore costante, dall’integrale primo (8.16) segue
ω(t)21
2σu · u = T (0) .
Inoltre σu · u e costante, come segue dalla Proposizione 4.26, visto che u eanche solidale:
0 =du
dt=
[du
dt
]
M
+ ω ∧ u =
[du
dt
]
M
.

100 DANIELE ANDREUCCI
Percio ω(t) e costante, ossia la rotazione e uniforme.Notiamo poi che se esistono due componenti di ω in M diverse da zero, icorrispondenti momenti d’inerzia devono essere uguali. Siano per esempioω1 e ω2; si ha dalla (8.14)
I11 = I22 .
Questo significa che tutte le direzioni nel piano (u1,u2) sono principali(perche sono tutte autovettori di σ).Distinguiamo tre casi:A) Due componenti di ω in M si annullano: non resta niente da dimostrare.B) Una sola componente di ω in M si annulla: per esempio ω3 = 0. Allora ωappartiene al piano (u1,u2) e, per l’osservazione precedente, e una direzioneprincipale.C) Nessuna componente di ω in M si annulla: ragionando come sopra segueche
I11 = I22 = I33 .
Dunque tutte le direzioni sono principali, e la tesi e ancora dimostrata.
8.4. Precessioni con attrito
La presenza di un momento dovuto all’attrito altera il quadro della stabilitadelle rotazioni intorno agli assi principali.Consideriamo per semplicita il caso di un rigido con ellissoide ES
c di rotazioneintorno all’asse u3, ossia tale che
I11 = I22 .
Nel caso di una precessione per inerzia dunque, le poloidi, a parte quelledegeneri corrispondenti alle rotazioni, sono le circonferenze
ESc ∩ λ3 = costante 6= 0 .
Le rotazioni intorno a u3 risultano percio stabili, a prescindere dal valoredel parametro
β =I33I11
,
che invece risultera discriminante nel caso con attrito.Per definizione un momento di attrito ha la forma
−kω ,ove k > 0 e costante. Le equazioni di Eulero divengono
ω1 = (1 − β)ω2ω3 −ω1
τ, (8.26)
ω2 = (β − 1)ω1ω3 −ω2
τ, (8.27)
ω3 = −ω3
τβ, (8.28)
ove si e definito
τ =I11k.

8.4. PRECESSIONI CON ATTRITO 101
Il sistema puo essere risolto in modo esplicito, ma limitiamoci a ottenere quile informazioni necessarie. Scrivendo la condizione iniziale per ω come
ω(0) =
3∑
h=1
ωh0uh ,
la (8.28) da
ω3(t) = ω30e− t
τβ , t > 0 . (8.29)
Moltiplicando poi la (8.26) per ω1, la (8.27) per ω2, e sommando le ugua-glianze ottenute, si ha
d
dt(ω2
1 + ω22) = −2
τ(ω2
1 + ω22) ,
che da
ω1(t)2 + ω2(t)
2 = (ω210 + ω2
20)e−2 t
τ . (8.30)
Consideriamo ora il coseno direttore di ω lungo u3, ossia
α3(t) =ω3(t)
|ω(t)| .
Si ricordi che α3 ≃ 0 implica che ω e quasi ortogonale a u3, mentre |α3| ≃ 1implica che ω e quasi parallelo a u3.Dalle (8.29), (8.30) segue attraverso un calcolo esplicito che
α3(t)2 =
ω230
ω230 + (ω2
10 + ω220)e
2tτβ
(1−β), t > 0 . (8.31)
Assumiamo per definitezza che
ω30 6= 0 , ω210 + ω2
20 > 0 .
Allora la (8.31) implica che per t→ ∞α3(t) → 0 se β < 1, ossia I33 < I11;
|α3(t)| → 1 se β > 1, ossia I33 > I11.
In altri termini: se all’istante iniziale il rigido non e posto in rotazioneintorno a un asse principale, per t → ∞ la direzione della velocita angolaretende a diventare ortogonale a u3 se questo versore corrisponde all’assemassimo dell’ellissoide, e invece tende a diventare parallela a u3 se questoversore corrisponde all’asse minimo dell’ellissoide. Si noti la differenza con ilcaso delle precessioni per inerzia gia richiamato sopra, dove α3 si mantienecostante nel tempo.Questa differenza ha ovvie conseguenze anche dal punto di vista della stabi-lita. Piu in dettaglio, e chiaro che l’unico punto di equilibrio del sistema delprimo ordine (8.26)–(8.28) e ω = 0. Tuttavia l’argomento sopra puo essereinterpretato nel senso che la rotazione intorno a u3 e stabile se e solo sequesto versore corrisponde all’asse minimo dell’ellissoide d’inerzia. Poichein ogni caso ω(t) → 0 per t → ∞, questo concetto di stabilita va inteso nelsenso che il versore di ω(t) tende a u3, o a −u3.

102 DANIELE ANDREUCCI
Esercizio 8.21. Con una opportuna trasformazione esponenziale ωi = eγtωi,e usando successivamente l’integrale primo (8.30), si pervenga alla soluzionedi (8.26)–(8.27) (ove si e sostituito (8.28))
ω1(t) = Ae−tτ sin
[δ +B(1 − e
− tτβ )
], (8.32)
ω2(t) = Ae−tτ cos
[δ +B(1 − e
− tτβ )
], (8.33)
oveB = (1 − β)ω30τβ ,
e A e δ sono scelti in modo che valga
ω1(0) = A sin δ = ω10 , ω2(0) = A cos δ = ω20 .
Se ne ricavi la direzione limite di ω(t) nel caso β < 1.

CAPITOLO 9
Applicazioni delle equazioni di Lagrange
9.1. Moti in campi centrali
Notazione. Sia (O,ei) un sistema di riferimento fisso. Consideriamo quiil moto di un punto materiale P di massa m, soggetto a un campo di forzeposizionali
F (x) = F (|x|) x|x| , x 6= 0 , (9.1)
con F ∈ C1(R3 \ 0). Assumeremo sempre−−→OP 6= 0.
E noto che il campo di forze F risulta essere conservativo in R3 \ 0, conpotenziale
U(x) =
|x|∫
r
F (ρ) dρ , (9.2)
ove r > 0 e un valore fissato ad arbitrio.
Definizione 9.1. Il campo di forze in (9.1) si dice centrale, con centrol’origine 0 ∈ R3.
Visto il ruolo privilegiato che le (9.1), (9.2) assegnano alla distanza dall’o-rigine O, conviene introdurre come coordinate lagrangiane per il moto di Ple coordinate sferiche
(r, ϕ, θ) ∈ (0,∞) × (−π, π) × (0, π) ,
in modo che −−→OP = (r cosϕ sin θ, r sinϕ sin θ, r cos θ) . (9.3)
La velocita v del punto si ottiene subito per derivazione, scomposta nellacomponente radiale e nelle due tangenti (alla sfera di raggio r):
v =rx
|x|+ rϕ sin θ(− sinϕ, cosϕ, 0)
+ rθ(cosϕ cos θ, sinϕ cos θ,− sin θ) .
(9.4)
In questo modo si ha
T l =1
2m|vl|2 =
1
2m
(r2 + r2ϕ2 sin2 θ + r2θ2
), (9.5)
e quindi
L =1
2m
(r2 + r2ϕ2 sin2 θ + r2θ2
)+
r∫
r
F (ρ) dρ . (9.6)
103

104 DANIELE ANDREUCCI
Le equazioni di Lagrange quindi sono
d
dt
[mr
]−m
(rϕ2 sin2 θ + rθ2
)− F (r) = 0 , (9.7)
d
dt
[mr2ϕ sin2 θ
]= 0 , (9.8)
d
dt
[r2θ
]−m
(r2ϕ2 sin θ cos θ
)= 0 . (9.9)
La (9.8) mostra come la coordinata ϕ sia ciclica, e valga quindi l’integraleprimo del moto
r(t)2ϕ(t) sin2 θ(t) = r(0)2ϕ(0) sin2 θ(0) =: c , t > 0 . (9.10)
Teorema 9.2. Il moto di P nel campo centrale di forze (9.1) si svolge sulpiano fisso passante per O e normale al vettore
−−→OP (0) ∧ v(0) ,
se i due vettori−−→OP e v all’istante iniziale t = 0 non sono paralleli.
Se invece sono paralleli, il moto di P si svolge sulla retta per O parallela a−−→OP (0).
Dimostrazione. La scelta delle coordinate lagrangiane puo essere fatta inmodo che all’istante iniziale si abbia
θ(0) =π
2, θ(0) = 0 . (9.11)
Infatti, in particolare, la seconda condizione vale se il piano θ = π/2 contienev(0).La (9.9), con le due condizioni iniziali in (9.11), ammette sempre la soluzionecostante
θ(t) =π
2, t > 0 . (9.12)
E importante osservare che questo vale per ogni possibile scelta delle funzionir(t) e ϕ(t) nella (9.9). Quindi, per il teorema di unicita, relativo al problemadi Cauchy (9.9), (9.11), la soluzione (r, ϕ, θ) del sistema lagrangiano (9.7)–(9.9) ha come terza componente la funzione costante in (9.12). Questosignifica che il moto si svolge sul piano θ = π/2.
Se i due vettori−−→OP (0) e v(0) non sono paralleli, non c’e altro da dimostrare.
Se invece sono paralleli, l’espressione (9.4) della velocita implica che ϕ(0) =
0, perche il secondo termine a destra nella (9.4) e ortogonale a−−→OP (0). Dalla
(9.10) segue quindi che
ϕ(t) = 0 , t > 0 ,
ossia che, oltre a θ, anche ϕ si mantiene costante. Il moto si svolge dunquesulla retta per O e la posizione iniziale di P .
Proposizione 9.3. Nel caso in cui−−→OP (0) e v(0) non siano paralleli, la
traiettoria del punto P nel piano θ = π/2 puo essere espressa come unacurva nella forma
r = R(ϕ) , (9.13)
almeno in un intervallo 0 ≤ t < t.

9.1. MOTI IN CAMPI CENTRALI 105
Dimostrazione. Basta osservare che la (9.10) implica che ϕ non si annullamai nelle ipotesi stipulate; quindi e possibile ottenere la funzione inversat = τ(ϕ), e quindi ricavare r come funzione di ϕ mediante la τ :
R(ϕ) = r(τ(ϕ)) .
La τ e definita, al piu, nell’intervallo (−π, π) di variazione della ϕ, e quindila rappresentazione (9.13) e solo locale, come indicato nell’enunciato.
La seguente Proposizione mostra come un campo di forze radiale sia conser-vativo solo se vale la (9.1).
Proposizione 9.4. Un campo di forze
F (x) = g(x)x
|x| , x ∈ R3 \ 0 , (9.14)
con g ∈ C1(R3 \ 0) e conservativo se e solo se vale g(x) = F (|x|), peruna opportuna F ∈ C1(R3 \ 0).Dimostrazione. A) Se vale g(x) = F (|x|), il potenziale di F e statoindicato nella (9.2).B) Viceversa, assumiamo che esista un potenziale U ∈ C1(R3 \ 0) per Fcome in (9.14). Dati due punti qualunque x1 e x2 con
|x1| = |x2| > 0 ,
si ha
U(x2) − U(x1) =
∫
γ
∇U · T ds =
∫
γ
F · T ds = 0 ,
ove γ e una qualunque curva regolare che giaccia sulla sfera di centro l’originedi raggio |x1| = |x2|, e che congiunga i due punti. Infatti il versore tangentea γ, indicato con T , risulta allora tangente a questa sfera, e percio ortogonalea F che per ipotesi ha sempre direzione radiale.Dunque U e costante su ciascuna sfera di centro l’origine; percio dipendesolo da |x| e il suo gradiente F ha direzione radiale, e modulo dipendentesolo da |x|.
9.1.1. La velocita areolare.
Definizione 9.5. Sia (r(t), ϕ(t)) la rappresentazione nelle usuali coordinatepolari di un moto piano. La quantita
1
2r(t)2ϕ(t)
prende il nome di velocita areolare.
La motivazione geometrica della Definizione 9.5 e data dal seguente Lemma.
Lemma 9.6. Assumiamo che la traiettoria di un moto nel piano (x1, x2) siarappresentabile come in (9.13), per 0 < t < t, e che in particolare ϕ(t) > 0per 0 < t < t. Definiamo anche il settore polare
S(t) =(x1, x2) | 0 < r < R(ϕ) , ϕ ∈ (ϕ(0), ϕ(t))
. (9.15)
Vale allorad
dtarea(S(t)) =
1
2r(t)2ϕ(t) , 0 < t < t . (9.16)

106 DANIELE ANDREUCCI
Dimostrazione. Basta osservare che nelle ipotesi poste nell’enunciato
area(S(t)) =
ϕ(t)∫
ϕ(0)
dϕ
R(ϕ)∫
0
ρdρ =
ϕ(t)∫
ϕ(0)
1
2R(ϕ)2 dϕ , (9.17)
e derivare in t.
Se vale ϕ < 0, si dimostra in sostanza lo stesso risultato, con ϕ sostituito da|ϕ| in (9.16).
E chiaro che S(t) e la parte di piano spazzata dal raggio vettore del motonell’intervallo di tempo (0, t).
Teorema 9.7. (II legge di Keplero) Il moto di P , soggetto al campo diforze centrali in (9.1), ha velocita areolare costante.
Dimostrazione. L’integrale primo (9.10), sostituito nella definizione divelocita areolare, implica subito la tesi.
9.1.2. La formula di Binet.
Teorema 9.8. (Formula di Binet) La funzione R introdotta nella Pro-posizione 9.3 soddisfa
−mc2( 1
R
)2[ d2
dϕ2
( 1
R
)+
1
R
]= F (R) . (9.18)
Dimostrazione. Dalla (9.10) si ha
r(t) =dR
dϕ(ϕ(t))ϕ(t) =
dR
dϕ(ϕ(t))
c
R(ϕ(t))2. (9.19)
Quindi
r(t) =d
dt
(dR
dϕ(ϕ(t))
c
R(ϕ(t))2
)=
d
dϕ
[dR
dϕ
c
R2
](ϕ(t)
)ϕ(t)
=d
dϕ
[dR
dϕ
c
R2
](ϕ(t)
) c
R(ϕ(t))2=
c2
R(ϕ(t))2d
dϕ
[− d
dϕ
1
R
](ϕ(t)
). (9.20)
La tesi segue sostituendo la (9.20), e ancora la (9.10), nella (9.7).
9.2. Sistemi di riferimento mobili. Le forze fittizie.
Consideriamo un sistema di corpi rigidi come nella Sezione 7.1.Nelle ipotesi del Teorema 7.1, ossia in sostanza se vale l’ipotesi dei lavorivirtuali, si ricavano le equazioni di Lagrange (7.1).Qui esaminiamo le conseguenze su queste equazioni di un cambiamento disistema di riferimento.
Notazione. Introduciamo dunque un sistema di riferimento mobile S =(XO,uh). Si noti in particolare che questo nuovo sistema di riferimento elo stesso per tutti i corpi rigidi del sistema olonomo, ossia non dipende da i.Supponiamo inoltre che sia XO che la velocita angolare ω della terna (uh)siano assegnate come funzioni del tempo.

9.2. SISTEMI DI RIFERIMENTO MOBILI. LE FORZE FITTIZIE. 107
E chiaro che per le velocita e accelerazioni relative a S si possono ottenererappresentazioni analoghe a quelle della Sezione 6.1. Tuttavia e facile intuireche le equazioni di moto devono essere diverse nel sistema di riferimento fissoe in quello mobile.
Teorema 9.9. Vale per ogni h ∈ 1 , . . . , ℓd
dt
[∂T lS
∂qh(q(t), q(t), t)
]− ∂T l
S
∂qh(q(t), q(t), t) = F l
hS(q(t), q(t), t) , (9.21)
ove T lS e l’energia cinetica in S, mentre F l
hS e definita dalla
F lhS =
n∑
i=1
∫
Λ∗
i
∂Xli
∂qh·[dF l
i − altiρi(λ) dµi(λ) − al
ciρi(λ) dµi(λ)]. (9.22)
Qui alti e al
ci indicano le accelerazioni di trascinamento e di Coriolis in S.
Dimostrazione. Secondo la (2.28) si ha, per ogni i = 1, . . . , n,
ali = al
ti + alci + al
S i . (9.23)
Usando l’ipotesi dei lavori virtuali (6.26) si ottiene dunque, sostituendo la(9.23),
n∑
i=1
∫
Λ∗
i
dF li ·∂Xl
i
∂qh=
n∑
i=1
∫
Λ∗
i
aliρi(λ) · ∂X
li
∂qhdµi(λ)
=
n∑
i=1
∫
Λ∗
i
[al
ti + alci + al
S i
]ρi(λ) · ∂X
li
∂qhdµi(λ) ,
da cui le (9.21) seguono secondo la stessa dimostrazione del Teorema 7.1.
Osservazione 9.10. Nella (9.22) gli argomenti delle varie funzioni sonostati omessi per semplicita, ma e bene notare in modo esplicito che nelleipotesi stabilite all’inizio della Sezione anche le al
ti e alci, oltre che le dF l
i,risultano funzioni di (q, q, t) (e non di q), il che giustifica la notazione in(9.21). Si veda infatti la Definizione 2.20.
9.2.1. Casi in cui l’accelerazione di Coriolis da contributo nullo
alle equazioni di Lagrange.
9.2.1.1. Moto relativo funzione di una sola coordinata lagrangiana. E il casoin cui
Xli (q, t;λ
i) = XO(t) +
3∑
j=1
yij(q;λ
i)uj(t) , q ∈ Q ⊂ R . (9.24)
Nella (9.21) si ha
alci ·
∂Xli
∂q= 2[ω ∧ vl
S i] ·∂Xl
i
∂q. (9.25)
D’altronde,
vlS i =
3∑
j=1
d
dt
[yi
j(q;λi)
]uj(t) = q
3∑
j=1
∂yij
∂q(q;λi)uj(t) = q
∂Xli
∂q(q, t;λi) ,

108 DANIELE ANDREUCCI
e quindi vlS i
e∂Xl
i
∂qsono paralleli. Ne segue dalla (9.25) che
alci ·
∂Xli
∂q= 0 .
Esempio 9.11. Punto vincolato a una curva solidale con S.Sia γ una curva solidale con S, parametrizzata da
ψ(s, t) = XO(t) +
3∑
j=1
ψj(s)uj(t) , s ∈ J .
Se il punto P e vincolato a γ, si puo usare s come coordinata lagrangiana,cosicche
Xl(s, t) = ψ(s, t) .
Come gia visto,
vlS = s(t)
∂Xl
∂s,
e
alc ·
∂Xl
∂s= 2[ω ∧ vl
S ] · ∂Xl
∂s= 2s(t)
[ω ∧ ∂Xl
∂s
]· ∂X
l
∂s= 0 .
9.2.1.2. Piano ruotante intorno a un asse che giace sul piano medesimo.Supponiamo qui che
ω(t) = ω(t)u3(t) , u3(t) = e3 , t ∈ I ,
e che O sia fisso, coincidente con l’origine del sistema di riferimento fisso.Dunque il moto di S e una rotazione (non uniforme, in genere) intornoall’asse fisso per O parallelo a e3. Sia Π(t) il piano passante per O e normalea u1(t); quindi Π(t) ruota intorno all’asse (solidale con S) passante per Oe parallelo a u3, che giace su Π(t).Supponiamo che i rigidi giacciano su Π(t), cosicche per ogni i = 1, . . . , n,
Xli (q, t;λ
i) = yi2(q;λ
i)u2(t) + yi3(q;λ
i)u3(t) . (9.26)
Quindi per h = 1, . . . , ℓ,
∂Xli
∂qh=∂yi
2
∂qhu2 +
∂yi3
∂qhu3 ,
e
vlS i =
3∑
j=2
[ ℓ∑
h=1
∂yij
∂qhqh
]uj .
Si noti che, come prevedibile,∂Xl
i
∂qh
e vlS i
giacciono su Π(t) e quindi sono
ortogonali a u1(t).Percio, per h = 1, . . . , ℓ e per ogni i = 1, . . . , n,
alci ·
∂Xli
∂qh= 2[ω ∧ vl
S i] ·∂Xl
i
∂qh= −2ω(t)
[ ℓ∑
k=1
∂yi2
∂qkqk
]u1 ·
∂Xli
∂qh= 0 .

9.2. SISTEMI DI RIFERIMENTO MOBILI. LE FORZE FITTIZIE. 109
9.2.2. Moto su una sfera in un sistema di riferimento ruotante.
Consideriamo un punto P di massa m vincolato alla superficie sferica diraggio R > 0 e centro l’origine del sistema di riferimento fisso. Sul puntonon sono applicate forze.Questo e un caso particolare dell’Esempio 6.13, in cui prendiamo F = 0.
Osservazione 9.12. Con la notazione dell’Esempio 6.13, si puo sempreassumere, scegliendo opportunamente le coordinate lagrangiane ϕ, θ, che lecondizioni iniziali siano
ϕ(0) = ϕ0 ∈ (−π, π) , θ(0) =π
2, ϕ(0) = ϕ0 ∈ R , θ(0) = 0 . (9.27)
Le (6.23)–(6.24) allora implicano subito che il moto si riduce a un motocircolare uniforme sulla circonferenza (massima) θ = π/2, o alla quiete.
Qui vogliamo scrivere le equazioni di moto in un sistema di riferimentoruotante S = (O,uh), ove
u1(t) = cos(ωt)e1 + sin(ωt)e2 ,
u2(t) = − sin(ωt)e1 + cos(ωt)e2 ,
u3(t) = e3 ,
con ω > 0 costante, e O coincidente con l’origine del sistema di riferimentofisso (e quindi con il centro della sfera). La velocita angolare di S e
ω(t) = ωe3 = ωu3(t) .
Il moto sara
Xl(ϕ, θ, t) = R cosϕ sin θu1(t) +R sinϕ sin θu2(t) +R cos θu3(t) , (9.28)
secondo l’usuale parametrizzazione di una superficie sferica con
ϕ ∈ (−π, π) , θ ∈ (0, π) .
Tuttavia le coordinate lagrangiane ϕ, θ hanno qui un significato diverso daquello che avevano sopra (nella notazione dell’Esempio 6.13): infatti per ϕ,θ costanti, il punto risulta fermo non nel sistema di riferimento fisso, mainvece in quello mobile S.Inoltre, ora le curve di livello θ = costante (i ‘paralleli’) non sono piu scelteortogonali a una direzione arbitraria (il che aveva condotto alla possibilitadi scrivere la (9.27)), ma piuttosto ortogonali alla direzione (fissata) di ω,cioe dell’asse di rotazione.Scriviamo le equazioni di Lagrange in S; la velocita e data da
vS = ϕ∂Xl
∂ϕ+ θ
∂Xl
∂θ, (9.29)
ove
∂Xl
∂ϕ= −R sinϕ sin θu1(t) +R cosϕ sin θu2(t) ,
∂Xl
∂θ= R cosϕ cos θu1(t) +R sinϕ cos θu2(t) −R sin θu3(t) .
Si noti che∂Xl
∂ϕ· ∂X
l
∂θ= 0 .

110 DANIELE ANDREUCCI
Dunque un conto diretto da
TS =1
2m|vS |2 =
1
2mR2[ϕ2 sin2 θ + θ2] . (9.30)
Restano da valutare le componenti lagrangiane delle forze, che si riducononel caso presente a quelle delle forze fittizie, secondo la (9.22).Di nuovo, calcoli diretti danno
F c = −2m[ωu3 ∧
(ϕ∂Xl
∂ϕ+ θ
∂Xl
∂θ
)]
= 2mωR[(ϕ cosϕ sin θ + θ sinϕ cos θ)u1
+ (ϕ sinϕ sin θ − θ cosϕ cos θ)u2
],
(9.31)
da cui
F c ·∂Xl
∂ϕ= −mωR2θ sin(2θ) , (9.32)
F c ·∂Xl
∂θ= mωR2ϕ sin(2θ) . (9.33)
Inoltre, visto che
F t = −mω ∧ [ω ∧Xl] = mω2R sin θ[cosϕu1 + sinϕu2] , (9.34)
si ha
F t · ∂Xl
∂ϕ= 0 , (9.35)
F t · ∂Xl
∂θ=
1
2mω2R2 sin(2θ) . (9.36)
Si verifica quindi che le equazioni di Lagrange sono
ϕ sin2 θ = −θ(ϕ+ ω) sin(2θ) , (9.37)
θ =1
2(ϕ+ ω)2 sin(2θ) . (9.38)
Esercizio 9.13. Si verifichi che nel caso la sfera ruoti intorno all’asse e3 convelocita angolare ω, e quindi S si possa considerare solidale con la sfera, leequazioni di moto rimangono invariate, sia nel sistema di riferimento fisso,che in quello mobile.In particolare, rimane valida l’Osservazione 9.12: se il punto e fermo all’i-stante iniziale (nel sistema di riferimento fisso) rimane in quiete.
Esercizio 9.14. (Moti su paralleli) Si dimostri che i moti con θ = θ0costante sono possibili per ogni valore di θ0 ∈ (0, π), e si riducono a moticircolari uniformi.Tuttavia la loro velocita e arbitraria solo per un particolare valore di θ0.
Esercizio 9.15. (Moti su meridiani) Si dimostri che ϕ puo mantenersicostante solo se anche θ rimane costante, e assume un particolare valore.Si noti anche come questa impossibilita dei moti lungo meridiani sia dovutaalla presenza della forza di Coriolis.
Esercizio 9.16. (Ritorno al sistema fisso) Si interpretino i moti trovatinegli Esercizi 9.14 e 9.15 nel sistema di riferimento fisso.

Parte 4
Appendici


APPENDICE A
Algebra lineare
A.1. Prodotti tra vettori
Notazione. Per ogni vettore f ∈ R3 indichiamo con fi le sue componentiscalari, ossia scriviamo
f = (f1, f2, f3) .
Definizione A.1. Il prodotto scalare tra due vettori f e g e
f · g =3∑
i=1
figi . (A.1)
Definizione A.2. Il prodotto vettoriale tra due vettori f e g e
f ∧ g = (f2g3 − f3g2, f3g1 − f1g3, f1g2 − f2g1) . (A.2)
Osservazione A.3. Si verifica subito che i prodotti scalare e vettorialegodono delle proprieta di linearita
f · (γ1f1 + γ2f2) = γ1f · f1 + γ2f · f2 ,
f ∧ (γ1f1 + γ2f2) = γ1f ∧ f1 + γ2f ∧ f2 ,
per ogni f , f1, f2 ∈ R3, e per ogni γ1, γ2 ∈ R.Inoltre il prodotto scalare e simmetrico
f1 · f2 = f2 · f1 ,
mentre il prodotto vettoriale e antisimmetrico
f1 ∧ f2 = −f2 ∧ f1 .
In particolare se f1 e f2 sono paralleli, allora
f1 ∧ f2 = 0 .
Definizione A.4. Il numero reale
f · g ∧ h (A.3)
si chiama prodotto triplo di f , g, h.
113

114 DANIELE ANDREUCCI
Osservazione A.5. Segue subito dalle definizioni che
f · g ∧ h = det
f1 f2 f3
g1 g2 g3h1 h2 h3
. (A.4)
Lemma A.6. Vale
f · g ∧ h = −g · f ∧ h . (A.5)
Dimostrazione. Per (A.4)
f · g ∧ h = det
f1 f2 f3
g1 g2 g3h1 h2 h3
= − det
g1 g2 g3f1 f2 f3
h1 h2 h3
= −g · f ∧ h .
Definizione A.7. Due vettori f e g si dicono ortogonali (o perpendicolari)se
f · g = 0 .
Lemma A.8. Siano f1, f2 ∈ R3. Allora f1 ∧ f2 risulta ortogonale a f1 ea f2.
Dimostrazione. Da (A.5) segue subito che
f1 · f1 ∧ f2 = 0 ,
da cui la tesi per la Definizione A.7.
Definizione A.9. Una base (ui) si dice ortonormale se valgono le
ui · uj = δij , i , j = 1 , 2 , 3 .
A.2. Cambiamenti di base
Notazione. Siano (u1,u2,u3) e (w1,w2,w3) due basi ortonormali in R3.Introduciamo le due matrici reali 3×3 A = (aij) e B = (bij) di cambiamentodi base, definite da
ui =
3∑
h=1
aihwh , wi =
3∑
h=1
bihuh , i = 1 , 2 , 3 .
Teorema A.10. Valgono le
A−1 = At = B . (A.6)
Dimostrazione. Si ha per ogni i
wi =
3∑
h=1
bihuh =
3∑
h=1
3∑
k=1
bihahkwk ,

A.2. CAMBIAMENTI DI BASE 115
da cui, per le proprieta delle basi vettoriali, si ha per ogni coppia (i, k),
δik =3∑
h=1
bihahk = (BA)ik ,
il che significa BA = id. Nello stesso modo da
ui =3∑
h=1
aihwh =3∑
h=1
3∑
k=1
aihbhkuk ,
segue che
δik =3∑
h=1
aihbhk = (AB)ik ,
il che significa AB = id. Quindi A−1 = B.Infine per ogni coppia (i, j)
δij = ui · uj =
3∑
h=1
3∑
k=1
aihajkwh ·wk =
3∑
h=1
aihajh = (AAt)ij ,
e dunque AAt = id, ossia B = At.
Osservazione A.11. Per l’ortonormalita delle due basi (ui) e (wj), vale
aij = ui ·wj .
Quindi ciascuna colonna della matrice A e formata dalle componenti delcorrispondente vettore wj nella base (ui). Ciascuna riga, invece, e formatadalle componenti del corrispondente vettore ui nella base (wj).
Osservazione A.12. Sia f ∈ R3, con
f =
3∑
i=1
λiui =
3∑
i=1
µiwi . (A.7)
Allora λ1
λ2
λ3
= A
µ1
µ2
µ3
. (A.8)
Teorema A.13. Sia (zi) una base ortonormale, e definiamo la matrice C
come
C = (cij) , wi =3∑
h=1
cihzh . (A.9)
Allora la matrice di cambiamento di base tra (ui) e (zi) e il prodotto AC,ossia per i = 1, 2, 3,
ui =3∑
h=1
(AC)ihzh . (A.10)
Dimostrazione. Segue subito dalle definizioni.

116 DANIELE ANDREUCCI
Definizione A.14. Una base ortonormale M = (ui) si dice positiva se lamatrice di cambiamento di base M tra (ui) e la base standard (ei) hadeterminante positivo.
In particolare
M = (ui · ej) =
u11 u12 u13
u21 u22 u23
u31 u32 u33
(A.11)
se per i = 1, 2, 3,
ui = (ui1, ui2, ui3) =3∑
j=1
uijej . (A.12)
Teorema A.15. La matrice A soddisfa
|detA| = 1 . (A.13)
Se poi M = (ui) e N = (wi) sono entrambe positive, allora
detA = 1 . (A.14)
Dimostrazione. Vale per la regola di Binet, e per la (A.6)
1 = det id = detAAt = det A detAt = (det A)2 .
Se poi entrambe le basi sono positive, per il Teorema A.13 si ha (qui M eN sono definite come nella Definizione A.14)
A = MN t ,
da cuidetA = det M det N t = det M det N > 0 .
Il prossimo Lemma mostra come i prodotti scalare e vettoriale si possanocalcolare anche usando le componenti in una base ortonormale positiva.
Lemma A.16. Sia (ui) una base ortonormale positiva, e sia
f =
3∑
i=1
λiui , g =
3∑
i=1
µiui . (A.15)
Allora valgono
f · g =
3∑
i=1
λiµi , (A.16)
e
f ∧ g = (λ2µ3 − λ3µ2)u1 + (λ3µ1 − λ1µ3)u2 + (λ1µ2 − λ2µ1)u3 . (A.17)
Dimostrazione. La (A.16) segue subito dalle definizioni di prodotto sca-lare e di base ortonormale, oltre che dall’Osservazione A.3.Anche la (A.17) segue in modo analogo, una volta che si siano stabilite le
u1 ∧ u2 = u3 , u2 ∧ u3 = u1 , u3 ∧ u1 = u2 . (A.18)
Si sa, per il Lemma A.8, che u1 ∧ u2 = γu3, per qualche γ ∈ R. Ma
γ = u1 ∧ u2 · u3 = detM = 1 ,

A.3. ANGOLI E PERPENDICOLARITA 117
per (A.14) applicata al caso in cui (wi) e la base standard. Le altre duerelazioni in (A.18) si dimostrano in modo simile.
Corollario A.17. Se f1 e f2 sono due vettori ortogonali, allora
|f1 ∧ f2| = |f1| |f2| . (A.19)
Dimostrazione. Se uno dei due vettori f i e nullo, non c’e niente da dimo-strare.Altrimenti, si puo scegliere una base ortonormale positiva (ui) in modo chef i sia parallelo a ui, i = 1, 2. Quindi, per (A.18), e per la linearita delprodotto vettoriale,
f1 ∧ f2 = |f1| |f2|u1 ∧ u2 = |f1| |f2|u3 ,
da cui la tesi.
A.3. Angoli e perpendicolarita
Lemma A.18. Siano f , g ∈ R3, con |f | = 1. Denotiamo
[g]‖ = (f · g)f , [g]⊥ = g − [g]‖ ,
le componenti vettoriali di g rispettivamente parallela e perpendicolare a f .Allora
f ∧ (f ∧ g) = − [g]⊥ . (A.20)
Dimostrazione. Se [g]⊥ = 0 non c’e niente da dimostrare. Altrimenti,osserviamo che
h = f ∧ g = f ∧ [g]⊥e un vettore diverso da quello nullo, e che f , [g]⊥ e h sono a due a dueortogonali.Visto che
f ∧ (f ∧ g) = f ∧ he ortogonale sia a f che a h, deve essere
f ∧ (f ∧ g) = γ [g]⊥ ,
per qualche γ ∈ R. Quindi
γ|[g]⊥|2 = [g]⊥ · f ∧ (f ∧ [g]⊥) = − [g]⊥ · (f ∧ [g]⊥) ∧ f= (f ∧ [g]⊥) · [g]⊥ ∧ f = −(f ∧ [g]⊥) · f ∧ [g]⊥ = − |f ∧ [g]⊥|2 .
Per il Corollario A.17, segue che γ = −1, e la dimostrazione e completata.
Osservazione A.19. Siano f e g due vettori di modulo unitario. Supponia-mo per il momento che, con la notazione del Lemma A.18, si abbia [g]⊥ 6= 0.Allora si puo costruire una (unica) base ortonormale positiva
(f ,[g]⊥|[g]⊥|
,u) ,
ove e chiaro che u e parallelo a f ∧ g = f ∧ [g]⊥:
f ∧ g = ε |f ∧ g|u , (A.21)
con ε ∈ −1, 1.

118 DANIELE ANDREUCCI
Allora per il Corollario A.17,
|f ∧ g|2 = |f ∧ [g]⊥|2 = |f ∧ (f ∧ [g]⊥)|2 = |[g]⊥|2
= |g|2 −∣∣∣[g]‖
∣∣∣2
= 1 − (f · g)2 . (A.22)
Dunque i due numeri reali
x = f · g , y = ε |f ∧ g| ,soddisfano x2 + y2 = 1. E noto allora che esiste un unico angolo θ ∈ [0, 2π)tale che
x = cos θ , y = sin θ . (A.23)
Se poi [g]⊥ = 0, allora, definendo x e y come sopra,
x ∈ −1, 1 , y = 0 ,
per cui le (A.23) continuano a valere per una scelta (unica) di θ ∈ [0, 2π)tra θ = 0 e θ = π.L’angolo θ si chiama l’angolo formato dai due vettori f e g.
A.4. Forme quadratiche
L’espressione
J(x) =N∑
h,k=1
ahkxhxk , (A.24)
si dice forma quadratica in x = (x1, . . . , xN ), con matrice A = (ahk).Supponiamo sempre la simmetria di A, cioe
A = At , (A.25)
ovvero
ahk = akh , h , k = 1 , . . . , N .
Si noti che si puo scrivere
J(x) = Ax · x = xtAx . (A.26)
Teorema A.20. (Eulero) Se vale la (A.25), allora per ogni i ∈ 1, . . . , Nsi ha
∂J
∂xi
(x) = 2N∑
h=1
aihxh . (A.27)
Dimostrazione. Si puo scrivere
J(x) = aiix2i + 2
∑
h 6=i
aihxixh +∑
h,k 6=i
ahkxhxk ,
da cui
∂J
∂xi
(x) = 2aiixi + 2∑
h 6=i
aihxh = 2
N∑
h=1
aihxh .
Teorema A.21. Se u e v sono due autovettori della matrice simmetricaA, corrispondenti a due autovalori diversi λ e µ, allora sono ortogonali.

A.4. FORME QUADRATICHE 119
Dimostrazione. Si ha
λu · v = Au · v = Av · u = µv · u ,il che implica, visto che λ 6= µ, l’asserto u · v = 0.


APPENDICE B
Complementi
B.1. Due punti nel piano
Consideriamo un sistema formato da due punti vincolati al piano x3 = 0,con coordinate cartesiane
P1 = (ξ1, ξ2) , P2 = (ξ4, ξ5) ,
sottoposti ai vincoli
ξ21 + ξ22 = R2 , (B.1)
(ξ4 − ξ1)2 + ξ22 = L2 , (B.2)
ξ5 = 0 . (B.3)
Dunque P1 e vincolato alla circonferenza di raggio R > 0, e centro nell’o-rigine, P2 e vincolato all’asse x, e i due punti sono a distanza fissa L >0.La matrice iacobiana dei vincoli e
2ξ1 2ξ2 0 0
2(ξ1 − ξ4) 2ξ2 2(ξ4 − ξ1) 00 0 0 1
.
E chiaro che l’ultima colonna (corrispondente a ξ5) e linearmente indipen-dente dalle altre in ogni posizione ξ ∈ Ξf .Caso I): Se
ξ4 6= 0 , ξ2 6= 0 , (B.4)
le prime due colonne sono linearmente indipendenti. Quindi il vincolo eolonomo, e si possono scegliere ξ1 e ξ2 come coordinate dipendenti dallacoordinata indipendente ξ4.Caso II): Se
ξ4 6= 0 , ξ2 = 0 , (B.5)
la prima e terza colonna sono linearmente indipendenti. Quindi il vincoloe olonomo, e si possono scegliere ξ1 e ξ4 come coordinate dipendenti dallacoordinata indipendente ξ2. Ci sono 4 configurazioni distinte corrispondentia questo caso.Caso III): Se infine ξ4 = 0, la matrice iacobiana diviene
2ξ1 2ξ2 0 02ξ1 2ξ2 −2ξ1 00 0 0 1
,
e quindi ha rango massimo se e solo se
ξ1 6= 0 . (B.6)
121

122 DANIELE ANDREUCCI
In questo caso quindi il vincolo e olonomo, e si possono scegliere ξ1 e ξ4 comecoordinate dipendenti dalla coordinata indipendente ξ2.Si noti che dalle equazioni (B.1) e (B.2) segue che si puo avere ξ4 = 0 in Ξf
solo se R = L.
B.1.1. Parametrizzazione nel caso I. Scegliamo ξ4 come coordinataindipendente. Le altre si esprimono come
ξ1 = g1(ξ4) =R2 − L2 + ξ24
2ξ4, (B.7)
ξ2 = g2(ξ4) =
√
R2 −[R2 − L2 + ξ24
2ξ4
]2
, (B.8)
ξ5 = g5(ξ4) = 0 . (B.9)
Si noti che nella (B.8) si e scelto di parametrizzare il sistema in configurazioniin cui ξ2 > 0; le posizioni in cui ξ2 < 0 si ottengono cambiando il segno dellag2.La quantita sotto radice nella (B.8) deve essere positiva, il che equivale a
|R− L| < |ξ4| < R+ L . (B.10)
In particolare il dominio di definizione delle gj sara uno dei seguenti inter-valli:
• se R ≤ L:0 ≤ L−R < ξ4 < L+R ,
oppure−L−R < ξ4 < −L+R ≤ 0 ;
• se R > L:0 < R− L < ξ4 < L+R ,
oppure−L−R < ξ4 < L−R < 0 .
B.1.2. Parametrizzazione nel caso II. Si prende ξ2 come coordinataindipendente, e si ottiene
ξ1 = g1(ξ2) =√L2 − ξ22 , (B.11)
ξ4 = g4(ξ2) =√R2 − ξ22 +
√L2 − ξ22 , (B.12)
ξ5 = g5(ξ2) = 0 . (B.13)
Si noti che nella (B.8) si e scelto di parametrizzare il sistema in configurazioniin cui ξ4 > ξ1 > 0; cambiando i segni delle radici quadrate nelle (B.11),(B.12) si ottengono le altre 3 posizioni.Le quantita sotto radice nelle (B.11) e (B.12) devono essere positive, il cheequivale a
|ξ2| < min(R,L) . (B.14)
In particolare il dominio di definizione delle gj sara uno dei seguenti inter-valli:
• se R ≤ L:−R < ξ2 < R ;

B.2. LE EQUAZIONI DELLE POLOIDI 123
• se R > L:
−L < ξ2 < L .
B.1.3. Parametrizzazione nel caso III. Consideriamo configurazionivicine a una in cui
ξ4 = 0 , ξ1 6= 0 ,
come spiegato sopra; ricordiamo che allora di necessita vale R = L. Vistoche le colonne di posti 1, 3 e 4 nella matrice iacobiana sono linearmenteindipendenti, possiamo scegliere ξ2 come coordinata indipendente.Per ξ1 e ξ5 valgono anche in questo caso le (B.11), (B.13) sopra, supponendodi rappresentare posizioni in cui ξ1 > 0.Invece, per ξ4 si ottiene dalle (B.1), (B.2)
ξ4
(ξ4 − 2
√R2 − ξ22
)= 0 , (B.15)
ove si e gia sostituita la (B.11) per ξ1.III.a) Se, nell’intervallo ove sara definita la parametrizzazione, ξ4 assumeanche valori non nulli, per quei valori deve essere percio
ξ4 = 2ξ1 = 2√R2 − ξ22 =: g4(ξ2) . (B.16)
Ne segue, per continuita, che la (B.16) deve valere nell’intervallo piu ampioove ξ1 non si annulla, che coincide pero con tutto l’intervallo di definizionedella rappresentazione. In altre parole, la (B.16) completa la parametrizza-zione del sistema, che e definita nell’intervallo
−R < ξ2 < R .
III.b) L’unica alternativa che resta per la validita della (B.15) e dunque
ξ4 = 0 =: g4(ξ2) , (B.17)
per ogni valore di ξ2. Dunque la parametrizzazione e data dalle (B.11),(B.13) e (B.17), e risulta definita per ξ2 ∈ (−R,R).
Esercizio B.1. Confrontare i risultati di questa Sezione con la Figura 5.1.
Esercizio B.2. E possibile considerare parametrizzazioni del sistema intermini di una diversa coordinata lagrangiana. Per esempio:
ξ1 = R cosϕ , ξ1 = R sinϕ , ξ4 = R cosϕ±√L2 −R2 sin2 ϕ .
Si determinino le configurazioni del sistema che si ottengono con questeparametrizzazioni, e per quali valori di ϕ.
B.2. Le equazioni delle poloidi
Rendiamo piu esplicite le equazioni delle poloidi gia date in (8.24)–(8.25);supporremo qui che
I11 < I22 < I33 , (B.18)
cosicche
I11 ≤ β2 :=|J0|22T (0)
≤ I33 ,

124 DANIELE ANDREUCCI
e riscriveremo le equazioni delle poloidi come
I211λ
21 + I2
22λ22 + I2
33λ23 = 2c2β2 , (B.19)
I11λ21 + I22λ
22 + I33λ
23 = 2c2 . (B.20)
B.2.1. Poloidi che circondano il semiasse piu corto. Supponiamo quiche
I22 < β2 < I33 . (B.21)
Moltiplicando la (B.20) per I33 e sottraendo poi la (B.19) dall’equazioneottenuta, si ha
I11(I33 − I11)λ21 + I22(I33 − I22)λ
22 = 2c2(I33 − β2) . (B.22)
La curva nel piano λ3 = 0 definita dalla (B.22) e un’ellisse, che scriveremocome
λ21
a21
+λ2
2
a22
= 1 , (B.23)
con
a21 =
2c2
I11
I33 − β2
I33 − I11, a2
2 =2c2
I22
I33 − β2
I33 − I22.
La terza coordinata sara quindi ottenuta dalla (B.20) come
λ3 = ±√
2c2 − I11λ21 − I22λ
22
I33. (B.24)
Dalle (B.23), (B.24) e facile ricavare la forma parametrica della poloide.
B.2.2. Poloidi che circondano il semiasse piu lungo. Supponiamo quiche
I11 < β2 < I22 . (B.25)
Moltiplicando la (B.20) per I11 e sottraendo poi l’equazione ottenuta dalla(B.19), si ha
I22(I22 − I11)λ22 + I33(I33 − I11)λ
23 = 2c2(β2 − I11) . (B.26)
La curva nel piano λ1 = 0 definita dalla (B.26) e un’ellisse, che scriveremocome
λ22
b22+λ2
3
b23= 1 , (B.27)
con
b22 =2c2
I22
β2 − I11I22 − I11
, b23 =2c2
I33
β2 − I11I33 − I11
.
La terza coordinata sara quindi ottenuta dalla (B.20) come
λ1 = ±√
2c2 − I22λ22 − I33λ
23
I11. (B.28)
Dalle (B.27), (B.28) e facile ricavare la forma parametrica della poloide.

B.2. LE EQUAZIONI DELLE POLOIDI 125
B.2.3. Poloidi limite. Entrambe le (B.24) e (B.28) continuano a valerese
β2 = I22 . (B.29)
Per esempio, dalla (B.24) si ottiene, usando la (B.23), sotto l’ipotesi (B.29),
λ3 =
√2c2
I33− I11I33
λ21 −
I22I33
(a2
2 −a2
2
a21
λ21
)
=
√2c2
I33− I11I33
λ21 −
I22I33
(2c2
I22− I11I22
I33 − I11I33 − I22
λ21
)
= ±|λ1|√I11I33
I22 − I11I33 − I22
.
(B.30)
Quindi le poloidi corrispondenti ai moti in cui vale la (B.29) sono date,oltre che dalle rotazioni intorno all’asse medio, dalle quattro poloidi limiteottenute intersecando l’ellissoide d’inerzia con i piani in (B.30). Questeseparano le poloidi che circondano l’asse piu lungo da quelle che circondanol’asse piu corto.
Esercizio B.3. (Complicato; per appassionati di programmazione) Nel co-dice TEX che segue, e che e quello usato per ottenere la Figura 8.1, spiegarecome sono tracciate le poloidi.Le istruzioni tra parentesi quadre sono comandi grafici (quindi da ignorare ai nostri fini,
come anche \psset), mentre le istruzioni con contenuto matematico sono quelle tra pa-
rentesi graffe.
Le formule sono espresse in PostScript, un linguaggio che usa la Notazione Polacca Inversa
(Reverse Polish Notation, RPN). Il coefficiente Coeff corrisponde al β2 sopra.
Il comando PostScript /Abc istruzioni def definisce la macro Abc come equivalente a
istruzioni.%% by Daniele Andreucci
%% [email protected]%% Polhodes in torque-free precessions: picture
%%\beginpspicture(12,10)%% definitions for graphics parameters
\pssetxunit=1.5 cm, yunit=1.5 cm,%Alpha=45,% Beta=0,%
xMin=-5 , xMax=5 , yMin= -3, yMax=3, zMin=-2, zMax=2.5,%nameX=$\lambda_1$, nameY=$\lambda_2$, nameZ=$\lambda_3$%
%%%%%%%%%%%%%%%%%%%%%%%%%% Numerical definitions and procedures
%% To change axes: only change \XXX > \YYY > \ZZZ%% To change polhodes: change numerical constants in:
%% \myxpolhodesm \myxpolhodelg \myzpolhodesm \myzpolhodelg%% (must be 0< constant <1 )%%
%% Axes in TeX ...\newcommand\XXX4.0%
\newcommand\YYY2.0%\newcommand\ZZZ1.0%
%% ... and in PostScript (see PStricks usrguide: inserting PS code)\newcommand\myaxes/Amax \XXX\space def /Amed \YYY\space def/Amin \ZZZ\space def
\newcommand\mymoments\myaxes/Imin 1 Amax div 2 exp def /Imed 1 Amed div 2 exp def
/Imax 1 Amin div 2 exp def %%%%%% Limit polhodes
%% coefficients in limit polhode\newcommand\mysepar\mymoments
/Cone Imax Imed sub Imax Imin sub div Imin div def

126 DANIELE ANDREUCCI
/Ctwo 1 Imed div def/Cthree Imed Imin sub Imax Imin sub div Imax div def
%%%%%% polhodes around x axis (largest axis)
%% coefficients in polhodes around x axis:\newcommand\myxxcoeff%
/Ctwo Coeff Imin sub Imed Imin sub div Imed div def/Cthree Coeff Imin sub Imax Imin sub div Imax div def
\newcommand\myxpolhodesm\mymoments/Coeff Imin 0.1 Imed Imin sub mul add def
\myxxcoeff
\newcommand\myxpolhodelg\mymoments/Coeff Imed 0.15 Imed Imin sub mul sub def\myxxcoeff
%% components
\newcommand\myxpolhodecomp%%% x component1 t cos 2 exp Imed mul Ctwo mul t sin 2 exp Imax mul Cthree mul
add sub Imin div sqrt%% y component
t cos Ctwo sqrt mul%% z component
t sin Cthree sqrt mul%%%%
%% polhodes around z axis (smallest axis)%% coefficients in polhodes around z axis:
\newcommand\myzzcoeff%/Cone Imax Coeff sub Imax Imin sub div Imin div def
/Ctwo Imax Coeff sub Imax Imed sub div Imed div def\newcommand\myzpolhodesm\mymoments
/Coeff Imax 0.05 Imax Imed sub mul sub def\myzzcoeff
\newcommand\myzpolhodelg\mymoments/Coeff Imed 0.1 Imax Imed sub mul add def
\myzzcoeff
%% components\newcommand\myzpolhodecomp%
%% x componentt cos Cone sqrt mul%% y component
t sin Ctwo sqrt mul%% z component
1 t cos 2 exp Imin mul Cone mul t sin 2 exp Imed mulCtwo mul add sub Imax div sqrt
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Drawing
%%%% This \rput contains the whole picture
\rput(4,3.33)%%%%% The coordinate axes\pstThreeDCoor[linecolor=black]
%%%% The ellipsoid%% parallels
\parametricplotThreeD[linewidth=0.2pt,linecolor=gray,plotstyle=curve]%(180,360)%(0,360)%
%\myaxes
%% x componentu cos Amax mul
%% y componentu sin t cos mul Amed mul%% z component
u sin t sin mul Amin mul
%%%%%% The polhodes%%
%% limit polhode x>0

B.2. LE EQUAZIONI DELLE POLOIDI 127
\parametricplotThreeD[xPlotpoints=100,linewidth=0.8pt,%linecolor=green,plotstyle=line]%
(0,360)%%\mysepar
%% xcomponentCone t sin 2 exp mul sqrt
%% y componentt cos Ctwo sqrt mul%% z component
t sin Cthree sqrt mul
%% limit polhode x<0\parametricplotThreeD[xPlotpoints=100,linewidth=0.8pt,%
linecolor=green,plotstyle=line]%(0,360)%%
\mysepar%% xcomponent
Cone t sin 2 exp mul sqrt neg%% y componentt cos Ctwo sqrt mul
%% z componentt sin Cthree sqrt mul
%%
%% polhode close to x vertex\parametricplotThreeD[linewidth=0.8pt,linecolor=red,plotstyle=line]%(0,360)%
%\myxpolhodesm
\myxpolhodecomp
%% polhode close to limit polhode on x vertex side\parametricplotThreeD[xPlotpoints=100,linewidth=0.8pt,%linecolor=red,plotstyle=line]%
(0,360)%%
\myxpolhodelg\myxpolhodecomp
%% polhode close to z vertex\parametricplotThreeD[linewidth=0.8pt,linecolor=blue,plotstyle=line]%
(0,360)%%
\myzpolhodesm\myzpolhodecomp
%% polhode close to limit polhode, on z vertex side\parametricplotThreeD[xPlotpoints=100,linewidth=0.8pt,%
linecolor=blue,plotstyle=line]%(0,360)%%
\myzpolhodelg\myzpolhodecomp
%%
%% yz equatorial ellipse (orthogonal to parallels)\pstThreeDEllipse[linewidth=0.2pt,linecolor=gray]%(0,0,0)(\XXX,0,0)(0,\YYY,0)
%% vertices:%% x axis
\pstThreeDDot[linecolor=black,dotscale=1,dotstyle=*](\XXX,0,0)\pstThreeDDot[linecolor=black,dotscale=1,dotstyle=*](-\XXX,0,0)%% y axis
\pstThreeDDot[linecolor=black,dotscale=1,%dotstyle=triangle*,fillcolor=white](0,\YYY,0)
\pstThreeDDot[linecolor=black,dotscale=1,%dotstyle=triangle*,fillcolor=white](0,-\YYY,0)
%% z axis\pstThreeDDot[linecolor=black,dotscale=1,dotstyle=*](0,0,\ZZZ)\pstThreeDDot[linecolor=black,dotscale=1,dotstyle=*](0,0,-\ZZZ)
%%
\endpspicture

128 DANIELE ANDREUCCI
Volendo ottenere una figura diversa dalla 8.1, salvare1 il codice sopra in unfile figura.tex, salvare il codice sotto in un file poloidi.tex, modificarecome desiderato, e compilare con
latex poloidi
latex poloidi
dvips poloidi -o poloidi.ps
ps2pdf poloidi.ps poloidi.pdf
(l’ultimo comando se volete un file PDF invece che PostScript).%Format: LaTeX2e
%% by Daniele Andreucci%% [email protected]
%% Polhodes in torque-free precessions: driver\NeedsTeXFormatLaTeX2e[1994/06/01]\documentclass[11pt,a4paper,twoside,italian]article
\usepackagecalc,babel,psboxit,pstricks,pst-plot,pst-3dplot,graphicx,%xcolor
\def\leftmark\textscDANIELE ANDREUCCI
\begindocument
\title
Corso di Modelli Matematici per la Meccanica:\\Poloidi%
\authorDaniele Andreucci\\Dipartimento di Metodi e Modelli Matematici\\Univ. di Roma La Sapienza\\via Antonio Scarpa 16 00161 Roma, Italy\\\[email protected]
\maketitle
\beginfigure[htbp]\begincenter\inputfigura
\endcenter\caption[]Alcune poloidi: ellissoide non di
rotazione avente semiassi nei rapporti $a_1=2a_2=4a_3$.\newline
Si notino le 4 poloidi \textsllimite che dividono le poloidi checircondano un semiasse minimo da quelle che circondano un semiasse massimo.\newline
Sono segnati anche i vertici, corrispondenti arotazioni uniformi, stabili (vertici su asse minimo e massimo)
e instabili (vertici su asse medio).\labelf:poloidi
\endfigure
\enddocument
1Usando ‘Copia e incolla’ occorre non introdurre caratteri estranei, il che sembra avveniresoprattutto in coda al blocco di testo copiato o in corrispondenza di segni come apostrofie virgolette.

APPENDICE C
Simboli e notazione usati nel testo
C.1. Simboli usati nel testo
a · b prodotto scalare dei vettori a e b.a ∧ b prodotto vettoriale dei vettori a e b ∈ R3.At trasposta della matrice (o del vettore) A.Br(x) sfera aperta con centro x e raggio r.x→ s0+ x tende a s0 da destra.x→ s0− x tende a s0 da sinistra.f(s0+) denota il limite di f(x) per x→ s0+.f(s0−) denota il limite di f(x) per x→ s0−.s+ parte positiva di s ∈ R, s+ = max(s, 0).s− parte negativa di s ∈ R, s− = max(−s, 0).sign(x) funzione segno di x ∈ R, definita da sign(x) = x/|x|,
per x 6= 0.C(A) classe delle funzioni continue in A. Lo stesso che C0(A).Cn(A) classe delle funzioni continue in A insieme con
le loro derivate fino all’ordine n.χI funzione caratteristica dell’insieme I:
χI(x) = 1 se x ∈ I, χI(x) = 0 se x 6∈ I.
∇f gradiente della funzione f(x): ∇f = ( ∂f∂x1
, . . . , ∂f∂x
N).
D2f matrice hessiana della funzione f .δx massa di Dirac centrata in x.ek k-esimo versore della base standard in RN .
f|B restrizione a B ⊂ A di una funzione f : A→ RN .e.d.o. equazione/equazioni a derivate ordinarie.
129