Elementi di Meccanica Razionale, Meccanica Analitica e Teoria della Stabilità

Moti - Capitolo 2 e 4 HRW 1
MOTI
Meccanica: branca della fisica che studia il moto dei corpi e le forze che lo fanno variare
Cinematica: descrive il moto dei corpi senza fare riferimento esplicito alle forze che agiscono su di essi
Dinamica: è lo studio della relazione esplicita tra le forze ed il loro effetto sul moto
Per descrivere un moto è necessario specificare la posizione del corpo in ogni istante. E’ quindi necessario definire un sistema di coordinate:
Caso Mono-dimensionale
• Coordinate Cartesiane
Origine delle Coordinate(posizione dell’osservatore)
O
Oggetto
Coordinata- spesso indicata con X
Origine delle Coordinate(posizione dell’osservatore)
O
Oggetto
Coordinata- spesso indicata con - X

Moti - Capitolo 2 e 4 HRW 2
Caso Bidimensionale
• Coordinate Polari
• Distanza Radiale r• Angolo θ
O
---> (r, θ)
rθ
• Coordinate Cartesiane
• Ascissa X• Ordinata Y
O x
y
---> (X,Y)
E’ ovviamente possibile trasformare le coordinate cartesiane in polari e viceversa
( ))sin(
cosθθ
ryrx
==
=
+=
xyr
yxr
atan
22
θ

Moti - Capitolo 2 e 4 HRW 3
Caso Tridimensionale
• Coordinate Cartesiane
• Coordinate Sferiche
• Coordinate Cilindriche
( ) ( )( ) ( )( )θ
ϕθϕθ
cossinsincossin
rzryrx
===
( )( )
zzryrx
===
θθ
sincos
yx
z
Coordinate Cartesiane

Moti - Capitolo 2 e 4 HRW 4
Per descrivere un moto è necessario, una volta specificata la posizione del corpo, definire lo spostamento, la velocità e l’accelerazione.
Spostamento: Lo spostamento di un corpo è il vettore il cui modulo è la distanza fra la posizione iniziale e la posizione finale del moto misurata lungo la retta che li congiunge. La direzione è quella delle retta che congiunge la posizione iniziale con la posizione finale. Il verso è quello rivolto dalla posizione iniziale alla posizione finale
Tanto più la posizione iniziale e la finale distano nel tempo tanto meno ‘preciso’ risulta essere il vettore spostamento.
Per definire lo spostamento è necessario aver definito in precedenza sia l’origine del sistema di coordinate che il sistema di coordinate da usare. Altrimenti non sapremmo da dove far partire il vettore posizione.
01 pps −=
A mano a mano che si considerano due posizioni sempre più vicine nel tempo il vettore spostamento diventa sempre più simile ad un segmento della traiettoria.
Portando questo ragionamento al limite è possibile definire il vettore spostamento infinitesimo ds che descrive lo spostamento tra due posizioni infinitamente vicine
Il vettore spostamento infinitesimo risulta quindi essere un segmentino della traiettoria.
La traiettoria risulta essere composta dall’inviluppo di tutti i vettori spostamento
ds
ds dsdsdsds

Moti - Capitolo 2 e 4 HRW 5
ATTENZIONE
La Traiettoria è il percorso del corpo nel piano xy (o xyz)
La Traiettoria viene visualizzata in un piano cartesiano con le coordinate (X,Y,Z ……. ) come assi
Moti - Capitolo 2 e 4 HRW 6
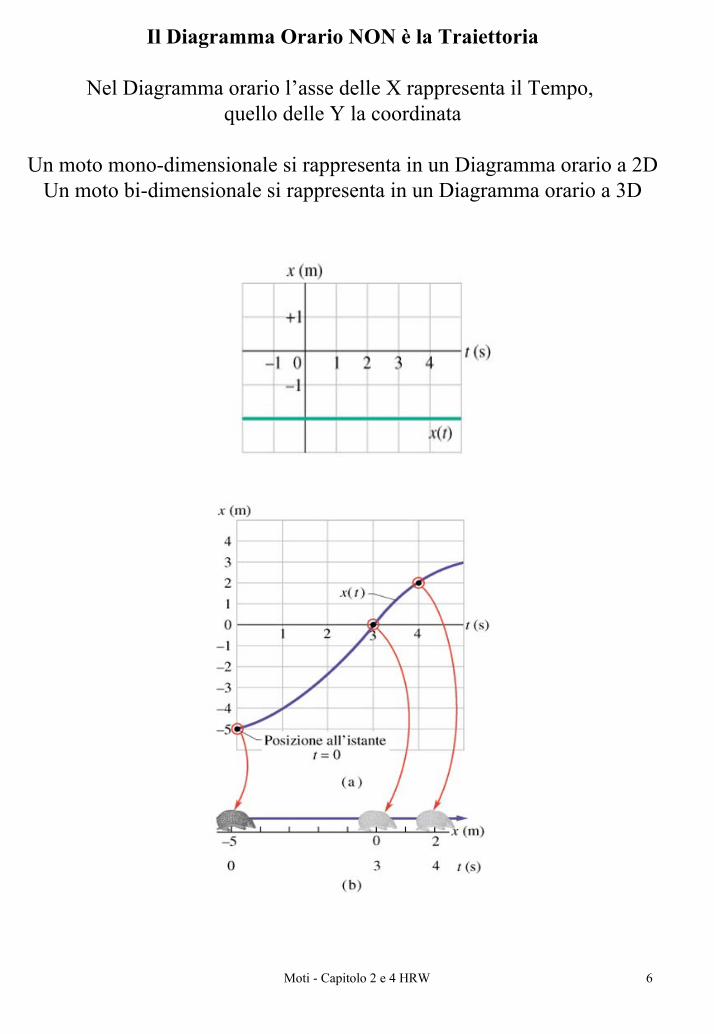
Il Diagramma Orario NON è la Traiettoria
Nel Diagramma orario l’asse delle X rappresenta il Tempo, quello delle Y la coordinata
Un moto mono-dimensionale si rappresenta in un Diagramma orario a 2DUn moto bi-dimensionale si rappresenta in un Diagramma orario a 3D

Moti - Capitolo 2 e 4 HRW 7
Per descrivere un moto è necessario, una volta specificato lo spostamento, definire quanto velocemente un corpo si muove
Velocità: La velocità di un corpo è, per definizione, il rapporto fra lo spazio percorso (cioè lo spostamento) e l’intervallo di tempo impiegato per percorrerlo
Poiché ho bisogno del vettore spostamento, anche la velocità dovrà essere un vettore.
Modulo: |vettore spostamento| * 1/intervallo di tempoDirezione: quella del vettore spostamentoVerso: quella del vettore spostamento
Tanto più la posizione iniziale e la finale distano nel tempo tanto meno ‘preciso’ risulta essere il vettore velocità
A mano a mano che si considerano due posizioni sempre più vicine nel tempo il vettore velocità diventa sempre più vicino alla tangente alla traiettoria.
Portando questo ragionamento al limite è possibile definire il vettore velocità istantaneav(t) che dà la velocità di un punto materiale nell’istante t. La velocità istantanea risulta essere tangente alla traiettoria
dtds
ttssv
ttssv
ttist ⇒−−
=⇒−−
=→
12
12
12
12
12
lim [ ] [ ][ ]smv =

Moti - Capitolo 2 e 4 HRW 8
Diagramma Orario
Curva di Velocità
dtdsvist =

Moti - Capitolo 2 e 4 HRW 9
dtds
ttbcv
ttbcv
bcttist
bc bc
⇒−−
=⇒−−
=→
lim
In un Diagramma Orario la velocità istantanea calcolata nel punto generico X rappresenta il coefficiente angolare della retta tangente la traiettoria nel
punto X
dtxdsxv )()( =x

Moti - Capitolo 2 e 4 HRW 10
Per descrivere un moto è necessario, una volta specificato lo spostamento e la velocità, definire quanto velocemente un corpo cambia la sua velocità
Accelerazione: L’accelerazione di un corpo è, per definizione, il rapporto fra il vettore velocità istantanea e l’intervallo di tempo associato
Poiché ho bisogno del vettore velocità, anche la accelerazione dovrà essere un vettore.
Modulo: |vettore velocità| * 1/intervallo di tempoDirezione: … dipende da caso a casoVerso: … dipende da caso a caso
Tanto più la velocità iniziale e la finale distano nel tempo tanto meno ‘preciso’ risulta essere il vettore accelerazione
A mano a mano che si considerano due posizioni sempre più vicine nel tempo è possibile definire il vettore accelerazione istantanea a(t) che dà la accelerazione di un punto materiale nell’istante t.
dtdv
ttvva
ttvva
ttist ⇒−−
=⇒−−
=→
12
12
12
12
12
lim [ ] [ ][ ]2sma =
Nota:
Lo spostamento infinitesimo è un segmentino di traiettoriaLa velocità istantanea è sempre tangente alla traiettoriaL’accelerazione può avere un orientamento qualsiasi rispetto alla traiettoria

Moti - Capitolo 2 e 4 HRW 11
kdtdva
ktdtdxv
ktx
2
2
2
==
==
=
k

Moti - Capitolo 2 e 4 HRW 12

Moti - Capitolo 2 e 4 HRW 13
• Spostamento infinitesimo
=−=−=−
=−=dzzzdyyydxxx
ssds
12
12
12
12
=
=
==
dtdzdtdydtdx
dtdsdtdsdtds
vvv
dtdstv
z
y
x
z
y
x
)(• Velocità istantanea
• Accelerazione istantanea
=
===
2
2
2
2
2
2
2
2
dtsd
dtsd
dtsd
dtsd
dtdvdt
dvdtdv
dtdva
z
y
x
z
y
x
==
==
∫∫∫∫∫∫
∫∫∫∫∫
∫dtta
dtta
dtta
dtta
dttv
dttv
dttv
dttvts
z
y
x
z
y
x
)(
)(
)(
)(
)(
)(
)(
)()(
==
∫∫∫
∫dtta
dtta
dtta
dttatv
z
y
x
)(
)(
)(
)()(
Moti - Capitolo 2 e 4 HRW 14
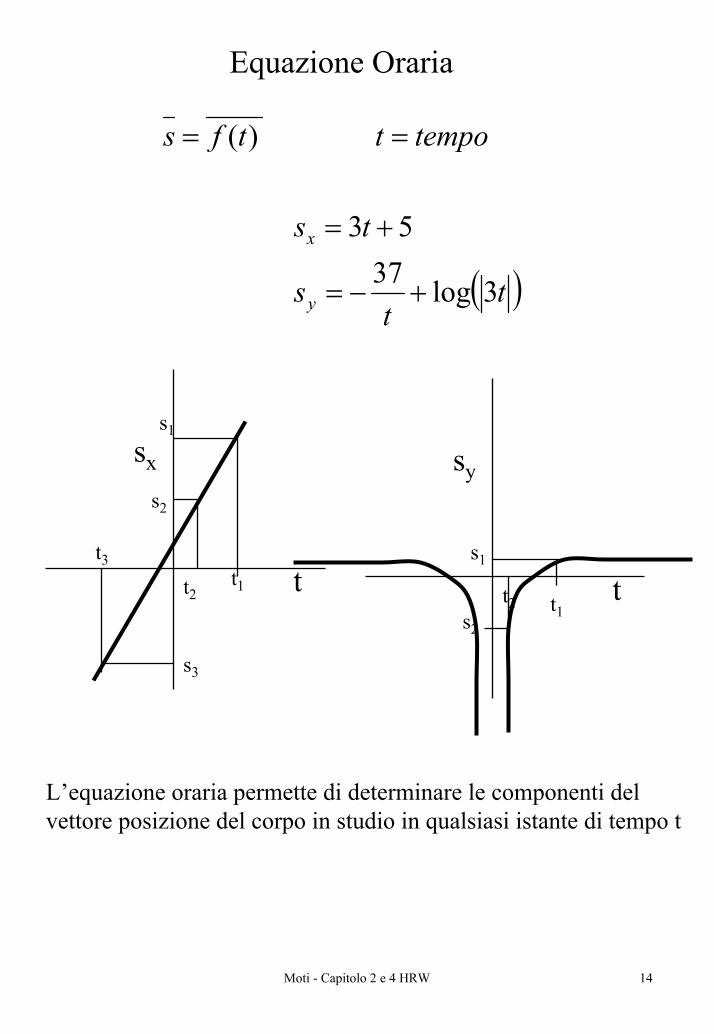
Equazione Oraria
( )tt
s
ts
tempottfs
y
x
3log3753
)(
+−=
+=
==
t
sx
t2
s3
s2
s1
t3t1 tt2
s2
s1
t1
sy
L’equazione oraria permette di determinare le componenti del vettore posizione del corpo in studio in qualsiasi istante di tempo t

Moti - Capitolo 2 e 4 HRW 15
Analogamente una equazione del tipo
ttv
v
tempotdt
tfdtgv
y
x
1373
)()(
2 +=
=
===
Permette di conoscere le componenti della velocità di un corpo in qualsiasi tempo t
vy
Un discorso Analogo vale per l’accellerazione
vx
t t
Accellerazione, Velocita’ e Spostamento sono legate tra loro da relazioni matematiche

Moti - Capitolo 2 e 4 HRW 16
Esempi alla lavagna:
0 - Esercizi
1 - Calcolo della velocità e dell’accellerazionenoto lo spostamento
2 - Calcolo dello spostamento nota la velocità

Moti - Capitolo 2 e 4 HRW 17
Moto Circolare
Coordinate Cartesiane 2D
)/(
)/(
)/(
)/(
)(
22
2
22
2
smylelungooneaccelerazidt
yda
smxlelungooneaccelerazidt
xda
smylelungovelocitàdtdyv
smxlelungovelocitàdtdxv
metriylelungoospostamenty(metri)xlelungoospostamentx
y
x
y
x
==
==
==
==
==
v
x
y vrθ
Coordinate Polari 2D
)/(
)/(
)/(
)/(
)((
22
2
22
2
smradialeoneaccelerazidt
rda
sradangolareoneaccelerazidtda
smradialevelocitàdtdrv
sradangolarevelocitàdtdv
metriradialeospostamentrrad)angolareospostament
r
r
==
==
==
==
==
θ
θ
θ
θ
Ma in un moto circolarer = costantevr= 0 e ar = 0
Riduco il problema in 1D
θ
Nuove Osservabili
Periodo (T) : tempo necessario per fare un giro Frequenza (ν) : 1/T (Hz)

Moti - Capitolo 2 e 4 HRW 18
Moto Circolare
Coordinate Polari (1D)
vrθ
)(2
)()(
)()(
2)(
)(
1
22
2
−=
=
=
==
=
=
=
=
==
srtvt
stvrtT
ara
)(m/sdt
xddtdva
zialeone tangenaccelerazia
rv
(m/s)dtdxv
etangenzialvelocitàv
metangenzialospostamentxrx
t
t
t
tt
t
t
t
t
πν
π
ω
ϑ
θ
)(2
)()(
)()(
2)(
)/(
)(
1
22
2
−=
=
==
=
=
=
=
stt
st
tT
)(rad/sdtθd
dtda
angolareioneaccelleraza
sraddtdθ
angolarevelocità
rado angolarespostamentθ
θ
θ
πων
ωπ
ω
ω
ω
Nota:Quando ω è costante prende il nome di pulsazione

Moti - Capitolo 2 e 4 HRW 19
Esercizi sul moto circolare uniforme:
Velocità tangenziale/Velocità angolareCoordinate Radiali – Coordinate cartesiane

Forza e Moto - Capitolo 5 e 6 - HRW 1
ForzeIl termine forza nel senso comune indica una trazione od una spinta
Nell’indicare una forza si usa una freccia in quanto una trazione o spinta ha sempre una intensità (il modulo) una direzione ed un verso. Da un punto di vista fisico quindi la forza è un vettore.
Se la forza è una quantità reale deve poter essere misurabile, per essere misurabile deve indurre degli effetti che possono essere quantificati.
Prima legge di Newton
‘Un corpo rimane nel suo stato di quiete o nel suo stato di moto rettilineo a velocità costante se una forza risultante non nulla non lo costringe a variare il suo stato di moto’
oppure
‘Un corpo non soggetto a forze o la cui risultante di tutte le forze a lui applicate è nulla permane nel suo stato di quiete o nel suo stato di moto rettilineo uniforme’
L’assenza di forze (o il fatto che la loro somma vettoriale sia il vettore nullo) quindi implica l’assenza di una variazione di moto, cioè l’assenza di accelerazione.
Un corpo senza accelerazione si dice in equilibrio

Forza e Moto - Capitolo 5 e 6 - HRW 2
Esempio
Incidente Stradale
Esempio
Le cinture di sicurezza nelle auto

Forza e Moto - Capitolo 5 e 6 - HRW 3
Seconda legge di Newton
‘Se una forza risultante ΣF non nulla agisce su un corpo di massa m il modulo della conseguente accelerazione a è direttamente proporzionale al modulo della forza risultante ed inversamente proporzionale alla massa. La direzione ed il verso dell’accelerazione è uguale alla direzione e verso della forza risultante.’
amFmFa =Σ
Σ=
La massa (quello che noi quantifichiamo come la quantità di materia) risulta essere il termine di proporzionalità tra forza ed accelerazione.Maggiore è la massa di un corpo maggiore dovrà essere la forza necessaria per dare al corpo una data accelerazione.
Le dimensioni della forza sono:
L’equazione di newton è di natura vettoriale e quindi può essere scomposta nelle sue componenti (cartesiane, sferiche, cilindriche … )
Un corpo è quindi in equilibrio quando la somma di tutte le forze agenti è nulla
[ ] [ ] [ ][ ]
[ ] NewtonNsmKgForza ==⋅= 2
ammamama
FFF
F
z
y
x
z
y
x
=
=
ΣΣΣ
=Σ Poiché la massa è uno scalare compare tale e quale in tutte le tre equazioni

Forza e Moto - Capitolo 5 e 6 - HRW 4
Composizione delle forze ⇒ Forza risultante
La macchina si muove con velocità costante. Quanto saràla forza totale ?
Il piede è fermo !Quanto saranno le tensionidei fili

Forza e Moto - Capitolo 5 e 6 - HRW 4
Esempi alla lavagna
Calcolo legge del moto rettilineo uniformeCalcolo legge moto uniformemente accelerato
Nota:
Anche questi argomenti trattati esclusivamente in Aula sono argomento di esame

Forza e Moto - Capitolo 5 e 6 - HRW 6
Forza Gravitazionale/Forza Peso
In prima approssimazione, per un osservatore sulla superficie terrestre, è la forza che attira qualsiasi corpo verso il suolo.
E’ una forza costante (non cambia nel tempo) ed uniforme (è la medesima in qualsiasi punto dello spazio)
F = - mg
F = - m g
Punta verso il basso
Accelerazione di gravità, 9.8 m/s2
Massa Inerziale

Forza e Moto - Capitolo 5 e 6 - HRW 7
Esempio:
Caduta libera
Calcolare posizione, velocità ed accelerazione di un corpodi massa M in caduta libera dopo 1,2,3,4,5 secondi

Forza e Moto - Capitolo 5 e 6 - HRW 8
Le equazioni di moto di un corpo in caduta libera NON dipendono dalla massa del corpo stesso. Quindi in assenza di attrito un sasso una piuma impiegano il medesimo tempo per arrivare a terra
C’e’ un bel filmato fatto dagli astronauti sulla Luna
Sito: http://vesuvius.jsc.nasa.gov/er/seh/feather.avi
- Alt – Invio -

Forza e Moto - Capitolo 5 e 6 - HRW 9
Forza Peso
Il Peso di un corpo è il modulo della forza netta richiesta per evitare che il corpo cada, quindi per controbilanciare la forza di
gravità agente sul corpo
Applet: IP2000 – Forza peso

Forza e Moto - Capitolo 5 e 6 - HRW 10
Forza Normale
La forza normale è la forza esercitata da una superficie quando,deformandosi, sostiene il corpo appoggiato.
La forza Normale è sempre perpendicolare alla superficie e di indica con la lettera N
Se il corpo ha massa M = 12 Kg quanto vale N ?
Che differenza c’e’ tra la Forza Normale e la Forza Peso ?Sono Sempre Uguali ?

Forza e Moto - Capitolo 5 e 6 - HRW 11
N
30°Fg

Forza e Moto - Capitolo 5 e 6 - HRW 12
Forza di Attrito Statico Fk
La forza di attrito statico è la forza necessaria per mettere inmoto un corpo di massa M su una superficie k
Il corpo è in quiete, non applico nessuna forza. Il corpo rimane fermo.
Inizio ad applicare una forza F < FkIl corpo rimane fermo.
Aumento F ma sempre F < FkIl corpo rimane fermo.
Ora F = FkIl corpo rimane fermo.
Se F > Fk il corpo acquisisce una accelerazione a .
µk < 1µk dipende dal materiale kFk = µk N

Forza e Moto - Capitolo 5 e 6 - HRW 13
Forza di Attrito Dinamico Fd
La forza di attrito dinamico è la forza che si oppone a qualsiasi moto di un corpo m che striscia su un materiale K
N
Fd v
NFd
v
Fd = µd N
µd < 1
Fd agisce solo se il corpo è in motoFd è sempre opposta alla direzione di moto
µd dipende dal materiale Kµd < µk

Forza e Moto - Capitolo 5 e 6 - HRW 14
Tensione
Quando un filo è fissato ad un corpo soggetto ad una forza, il filo è sotto tensione. Il filo esercita sul corpo una forza di trazione T
applicata al punto di fissaggio del filo e diretta lungo il filo
La tensione della corda è il modulo di tale forza
Quanto vale T nei tre casi (i tre corpi sono fermi) ?

Forza e Moto - Capitolo 5 e 6 - HRW 15
Forza Elastica
Un materiale elastico è un materiale che ha la capacità di riacquistare la forma iniziale dopo essere stato compresso o deformato (p.es. la molla)
La forza necessaria per allungare o accorciare una molla (caso 1D) è linearmente proporzionale all’allungamento stesso. La costante di proporzionalità k è detta costante elastica
)( 0xxkF −=
La osservabile x0 rappresenta l’estensione della molla quando non è soggetta a forze, l’osservabile x indica l’attuale estensione della molla
• Se comprimo la molla la forza che esercito è negativa
• Se estendo la molla la forza che esercito è positiva
Per motivi di semplicità si considera sempre la molla di estensione nulla, cioè x0 = 0. E’ facile correggere i calcoli in caso contrario
0)( 00 <−=< xxkFxx
0)( 00 >−=> xxkFxx

Forza e Moto - Capitolo 5 e 6 - HRW 16
Forza Centrifuga
L’autista dell’automobile sente una forza che lo porta verso l’esterno.
Questa forza è detta forza centrifuga
La forza centrifuga è una forza ‘apparente’, una forza cioè che viene sentita solo se l’osservatore non è fermo o in moto rettilineo uniforme. Per un osservatore in moto circolare uniforme la forzacentrifuga può essere espressa come:
Dove ω è la velocità angolare ed r il raggio di curvatura
rmF 2ω=

Forza e Moto - Capitolo 5 e 6 - HRW 15
Forza di Coulomb
Il modulo |F| della forza che una carica puntiforme q1 esercita su un’altra carica puntiforme q2 è direttamente proporzionale al prodotto delle due quantità di carica ed inversamente proporzionale al quadrato della distanza
k è una costante di proporzionalità detta costante elettrostatica di Coulomb. La direzione della forza è quello della congiungente le due cariche puntiformi ed il verso è attrattivo per due cariche di segno opposto e repulsivo per due cariche dello stesso segno.
Due cariche puntiformi di 1 Coulomb poste ad 1 metro di distanza subiscono ciascuna una forza attrattiva/repulsiva pari a 8.99 109 N
221
rqqkF =
[ ][ ][ ]2
29
0
1099.84
1C
mN⋅=
πε
- q2
+ q2
- q1- q1

Forza e Moto - Capitolo 5 e 6 - HRW 16
Forza di LorentzE’ data una particella di carica Q in moto rettilineo uniforme con velocità v che improvvisamente entra in un campo magnetico costante B ortogonale alla velocità v
La particella carica subisce la forza di Lorentz.
L’intensità della forza di Lorentz
Florentz
v x
z
B
y
BvqF ×=
è :
Nulla se v è parallela a BPerpendicolare al vettore velocità Perpendicolare al vettore Campo Magnetico
)sin( vBBvqF ϑ=
( )( )( )xyyxz
zxxzy
yzzyx
BvBvqF
BvBvqF
BvBvqF
−=
−=
−=

Forza e Moto - Capitolo 5 e 6 - HRW 17
Forze in natura
In natura esistono 4 forze fondamentali, con cui è possibile descrivere tutti i fenomeni naturali noti:
• Forza Gravitazionale … è responsabile di tutti i fenomeni astronomici e ed è la forza che percepiamo nel modo più immediato
… Legge di gravitazione universale di Newton… Relatività Generale
• Forza Elettromagnetica … lega gli elettroni al nucleo ed è responsabile di tutti i fenomeni elettrici
… Equazioni di Maxwell
• Forza Nucleare forte …….lega i mattoni più elementari della materia stessa. Mantiene unite le particelle ed impedisce ai nuclei di disintegrarsi per la reciproca repulsione fra protoni.
… La forma esplicita completa è tuttora ignota
• Forza Nucleare debole …. Assicura la produzione di luce e calore per opera della fusione nucleare, è responsabile dei decadimenti radioattivi.
… La forma esplicita non è completamente nota
Qualsiasi altra forza deriva da queste quattro
Forza peso
Forza di attrito
Forza viscosa
Forza elettrostatica
Forza di Lorentz
∧
= rrmmGF 2
21
2/80.9 smgjmgF =−=∧
NkF =
vkF 0−=∧
= rrqqF 2
21
041πε
BvqF ∧=

Forza e Moto - Capitolo 5 e 6 - HRW 18
Esempio – Composizione di Moti !
Caduta libera
Applet: IP2000 Bomber

Forza e Moto - Capitolo 5 e 6 - HRW 19
Esempio:
Moto Parabolico
Un proiettile di massa m, viene sparato con velocità v = 25 m/s ad un angolo di 40° rispetto al suolo. Quale è la gittata del cannone e quale è la massima altezza raggiunta dal proiettile(trascurare l’attrito).
Quale sarebbe l’angolo che massimizza la gittata.
Altri esempi:

Forza e Moto - Capitolo 5 e 6 - HRW 20
Applet: Tiro al Volo

Forza e Moto - Capitolo 5 e 6 - HRW 21
Esempio
La velocità e l’accellerazione sono molto differenti

Forza e Moto - Capitolo 5 e 6 - HRW 22
Applicazione delle leggi di Newton
Caduta libera con attritoSollevamento di un pesoSlitta con attrito
Nota:
Anche questi argomenti trattati esclusivamente in Aula sono argomento di esame

Forza e Moto - Capitolo 5 e 6 - HRW 23
Terza legge di Newton
‘Se un corpo esercita una forza su un secondo corpo, il secondo corpo esercita sul primo corpo una forza uguale in modulo e direzione ma opposta in verso.’
FF
2
2
/39.09236
/0033.011000
36
sma
sma
uomo
astronave
−=−
=
==
Le due forze sono identiche ma vengono esercitate su corpi diversi, con masse differenti. Quindi l’effetto indotto da queste due forze identiche può essere sensibilmente differente.
Esempio
F = 36 Nmastronave = 11000 kgmuomo = 92 kg

Forza e Moto - Capitolo 5 e 6 - HRW 24
Forza e Moto - Capitolo 5 e 6 - HRW 25

Forza e Moto - Capitolo 5 e 6 - HRW 26
Esempio
Che forza devo applicare per avere la corda orizzontale

Forza e Moto - Capitolo 5 e 6 - HRW 27
Esercizi con esempi di Forza.
Nota:
Anche questi argomenti trattati esclusivamente in Aula sono argomento di esame

Forza e Moto - Capitolo 5 e 6 - HRW 28
Moto Circolare
Coordinate Polari (1D)
vrθ
)(2
)()(
)()(
2)(
)(
1
22
2
−=
=
=
==
=
=
=
=
==
srtvt
stvrtT
ara
)(m/sdt
xddtdva
zialeone tangenaccelerazia
rv
(m/s)dtdxv
etangenzialvelocitàv
metangenzialospostamentxrx
t
t
t
tt
t
t
t
t
πν
π
ω
ϑ
θ
)(2
)()(
)()(
2)(
)/(
)(
1
22
2
−=
=
==
=
=
=
=
stt
st
tT
)(rad/sdtθd
dtda
angolareioneaccelleraza
sraddtdθ
angolarevelocità
rado angolarespostamentθ
θ
θ
πων
ωπ
ω
ω
ω
Nota:Quando ω è costante prende il nome di pulsazione

Forza e Moto - Capitolo 5 e 6 - HRW 29
Moto circolare Uniforme
Moto in cui :
• vt costante ⇔ ω costante ⇔ ω = pulsazione• T costante ⇒ T = Periodo• ν costante ⇒ ν = frequenza
Un corpo che si muove in moto circolare uniforme subisce una forza non nulla (detta centripeta) SEMPRE diretta verso il centro
vF
rmrvmF t 2
2
ω==

Forza e Moto - Capitolo 5 e 6 - HRW 30
Esempio alla lavagna
Le equazioni del moto rotatorio

Lavoro ed Energia Meccanica - Cap. 7 HRW 1
Energia
A
Agisce solo la gravita, trascuriamo l’attrito
Per sapere la velocità nel punto A non mi è sufficiente sapere la velocità iniziale Vo ma anche conoscere accuratamente la curvatura della slitta. I conti inoltre sono estremamente complessi poiché la forza agente sul corpo cambia in ogni punto, cambiando la curvatura della rotaia.
Esiste una scorciatoia ?

Lavoro ed Energia Meccanica - Cap. 7 HRW 2
Lavoro ed Energia
Il concetto di lavoro intuitivamente quantifica la fatica che una persona o una macchina devono fare per spostare un oggetto.
Maggiore è lo spostamento del corpo, maggiore è la forza impiegata per spingere, maggiore sarà la fatica e intuitivamente maggiore dovrà essere il
lavoro compiuto.
Intuitivamente il lavoro dovrà quindi essere legato sia allo spostamento che all’intensità della forza
E’ chiaro che la componente della forza che ‘lavora’ è quella che induce direttamente lo spostamento, cioè quella parallela alla spostamento
( )θcosdsFdLdsFdL =⋅=
Il lavoro infinitesimo dL fatto da una forza F per spostare un corpo di un tratto ds si definisce come il prodotto scalare tra la forza e lo spostamento

Lavoro ed Energia Meccanica - Cap. 7 HRW 3
Il lavoro:
• E’ un numero, infatti non necessita di una direzione o di un verso• E’ nullo se la forza è nulla• E’ nullo se lo spostamento è nullo
• Spingere contro una cassa che rimane ferma non da lavoro • E’ nullo se lo spostamento è perpendicolare alla forza • La forza di Lorentz è a lavoro nullo• E’ positivo se la forza è parallela allo spostamento (lavoro motore)• E’ negativo se la forza è opposta allo spostamento (lavoro resistente)
Il lavoro si misura in Joule:
La definizione si può semplificare in alcuni casi particolari e solo in questi !!
Caso 1D ⇒ Non è più necessario il prodotto scalare dL = Fds
Spostamento Rettilineo + ⇒ Si può passare alla forma integrale L = F s cos(θ)
Forza costante
In tutti gli altri casi per calcolare il lavoro è necessario risolvere un integrale di linea
[ ][ ] [ ][ ][ ]
[ ] [ ][ ][ ]
[ ] JouleJsmkgm
smkgsFLavoro ===== 2
2
2
∫ ⋅=),( BAldsFL
A
Bl

Lavoro ed Energia Meccanica - Cap. 7 HRW 4
Il lavoro è la conseguenza dell’applicazione di una forza, cioè di una accelerazione, è quindi associato ad una variazione di velocità.
Il calcolo del lavoro secondo la definizione implica un processo di integrazione che è il più delle volte lungo e complesso
Tuttavia per una forza e parallela alla traiettoria (rettilinea):
2222
022
21
21
2)(
)0.(2
)rettilinea(atraiettoriallaparallelaecostanteForza
0
0
mvmvvv
mL
sedacceleratounifmotounperVeroasvvmassamFssFL
dsFdL
amF
−=−
=
=+=
=⋅==⋅=
⋅=
=
Il lavoro L fatto da una forza F costante per portare un corpo di massa m dal punto A al punto B può essere espresso dalla differenza dell’energia cinetica calcolata in B ed in A
AcinEAinCineticaEnergiaAmv ,2)(
21
⇒⇒

Lavoro ed Energia Meccanica - Cap. 7 HRW 5
Il lavoro è la conseguenza dell’applicazione di una forza, cioè di una accelerazione, è quindi associato ad una variazione di velocità.
Il calcolo del lavoro secondo la definizione implica un processo di integrazione che è il più delle volte lungo e complesso
Piu in generale:
( ) ( )
( )
22
2
22
21
21)(
21
21
21
21
AB
B
A
B
A
mvmvBAL
vdmdL
vdmdtvdtdmdL
dtvvdtdmdtv
dtdvmdtvFdt
dtdsFdL
dsFdL
−=⇒
=
==
⋅=⋅=⋅=⋅=
⋅=
∫∫
Il lavoro L fatto da una qualsiasi forza F o somma di queste per portare un corpo di massa m dal punto A al punto B può essere espresso dalla differenza dell’energia cinetica calcolata in B ed in A
Teorema del lavoro e dell’energia cinetica
Quando una forza risultante non-nulla compie un lavoro L su un corpo, l’energia cinetica del corpo varia dal suo valore iniziale Ecin,0 al valore finale Ecin,f e la differenza fra l’energia cinetica finale e quella iniziale è uguale al lavoro compiuto dalla forza.
AcinA EAinCineticaEnergiamv ,2
21
⇒⇒
L’unità di misura dell’energia cinetica è ovviamente il Joule

Lavoro ed Energia Meccanica - Cap. 7 HRW 6
Esempi alla lavagna:
Calcolo del lavoro da forze differenti
Gravitazionale
mediante la definizionemediante il teorema L-Ecin
Etc. Etc.
Nota:
Anche questi argomenti trattati esclusivamente in Aula sono argomento di esame

Lavoro ed Energia Meccanica - Cap. 7 HRW 7
ESEMPIO
Ragioniamo sulla Forza di Gravita sulla superficie terrestre
F = - mg

Lavoro ed Energia Meccanica - Cap. 7 HRW 8
Nel caso di una forza semplice come la forza peso F=- mg j il lavoro risulta essere
• indipendente dalla traiettoria• legato solo alla quota iniziale e finale
Noti cioè due punti A e B qualsiasi è possibile conoscere il lavoro necessario per andare da A a B semplicemente con la formula mg(hB-hA)
Energia Potenziale –(Forza Peso) -
Per la forza peso e’ quindi possibile costruire, in ogni punto dello spazio una funzione, Energia potenziale U(P). L’Energia potenziale di una massa m in un punto P è definita come il lavoro necessario per portare la massa m dal punto P ad un punto di riferimento precedentemente determinato.
Poiché per la forza peso il lavoro non dipende dalla traiettoria ma unicamente dalla posizione di partenza e da quella di arrivo allora l’Energia Potenziale è univocamente definita in ogni punto dello spazio
Prif
Prif
mghmghPUrifPLPU
mghmghrifPL
jmgF
+−=−=
+−=−
−=∧
)()()(
)(
P
rifhrif
hP
rif
Forze Conservative
Se il lavoro compiuto da una forza nello spostare un corpo da una posizione ad un altra è indipendente dal cammino percorso, la forza è detta conservativa

Lavoro ed Energia Meccanica - Cap. 7 HRW 9
( ) ( )( )( ) ( )
( ))()()()(
)()()(
AUPUPUAUhhmghhmg
hhhhmgPrifLrifALPAL
rifPArif
rifPArif
−−=−+=
−−−−=
−+−−=→+→=→
Poiché in un campo conservativo il lavoro fatto per andare dal punto A al punto B non dipende dal percorso fatto è possibile immaginare una traiettoria che va punto A al punto di riferimento per il calcolo del potenziale e da questo al punto P.
Quindi la differenza del valore dell’energia potenziale calcolata nel punto A e nel punto P fornisce il lavoro necessario per portare un corpo dal punto P al punto A.
Per calcolare il lavoro quindi la fisica ha a disposizione tre differenti tecniche:
• La prima mediante, la definizione, implica una processo di integrazione in più dimensioni che spesso può essere complesso o non risolvibile analiticamente.
• La seconda per mezzo del teorema del Lavoro e dell’Energia Cinetica, banale se si conoscono le velocità iniziale e finale.
• La terza, nell’ipotesi di forza conservativa, per mezzo dell’energia potenziale.
In questa ultima tecnica è necessario sapere SOLO ed ESCLUSIVAMNTE il valore dell’energia potenziale nei due punti A e B.
∫ ⋅=),( BAldsFL
22
21
21
AB mvmvL −=
))()(( AUBUL −−=

Lavoro ed Energia Meccanica - Cap. 7 HRW 10
AcinPcin
AcinPcin
AcinPcinAP
EAUPUEPUAUEE
PUAUPAL
EEmvmvPAL
,,
,,
,,22
)()()()(
)()()(21
21)(
+=+
−=−
−=→
−=−=→
L’energia cinetica e l’energia potenziale sono quindi due quantità molto legate tra loro infatti entrambe esprimono il lavoro fatto per andare tra due punti A e P
Un corpo in caduta a mano a mano che diminuisce di quota aumenta di velocità ma diminuisce di energia Potenziale
In altre parole è come se l’energia potenziale si trasformasse in energia cinetica
Principio di conservazione dell’energia (meccanica)
La somma dell’energia potenziale e dell’energia cinetica possedute da un corpo in un punto P si dice Energia Meccanica.
L’Energia Meccanica di un corpo, in un sistema isolato, si conserva in ogni punto della sua traiettoria

Lavoro ed Energia Meccanica - Cap. 7 HRW 11
Più in Generale
Forze Conservative
Se il lavoro compiuto da una forza nello spostare un corpo da una posizione ad un altra è indipendente dal cammino percorso, la forza è detta conservativa
Per una forza conservativa è quindi possibile definire la funzione Energia Potenziale
Energia Potenziale per una forza generica
Per una forza conservativa e’ quindi possibile costruire, in ogni punto dello spazio una funzione, Energia potenziale U(P). L’Energia potenziale in un punto P è definita come il lavoro necessario per portare il corpo dal punto P ad un punto di riferimento precedentemente determinato.
Ogni forza conservativa ha la proprietà che il lavoro che essa compie su un corpo lungo un cammino chiuso è nullo
∫−
⋅=)(
)(rifPl
dsFPU

Lavoro ed Energia Meccanica - Cap. 7 HRW 12
Esempi di forze conservative
Forza Peso:
Forza Elastica:
Forza Gravitazionale:
Forza Elettrostatica:
PmghPUjmgF =−=∧
)(
2
21)( pkxPUikxF =−=
∧
prqqPUr
rqqF 21
02
21
0 41)(
41
πεπε==
∧
prmmGPUr
rmmGF 212
21 )( ==∧
Non tutte le forze sono conservative, una forza è non conservativa se il lavoro che compie su un corpo dipende dal cammino percorso (p.es. la forza di attrito)
PotenzaLa potenza è la rapidità con cui viene compiuto il lavoro L ed è definita
come la derivata del lavoro rispetto al tempo
[ ] [ ][ ][ ]3
2
smkgWattP
dtdLP ===

Lavoro ed Energia Meccanica - Cap. 7 HRW 13
Curve di Potenziale
E’ possibile mettere in grafico l’andamento del potenziale di una data forza
Forza Pesom = 1 kg g = 9.8 m/s2
-30
-20
-10
0
10
20
30
40
50
60
-4 -2 0 2 4 6
Altezza
Ener
gia
Pote
nzia
le
mghhU =)(
L’Energia Potenziale della forza peso è una funzione lineare dell’altezza. Maggiore è l’altezza maggiore è l’energia potenziale.Ovviamente la forza peso non ha punti di equilibrio

Lavoro ed Energia Meccanica - Cap. 7 HRW 14
Curve di Potenziale
E’ possibile mettere in grafico l’andamento del potenziale di una data forza
-5
0
5
10
15
20
25
30
35
40
45
50
-4 -2 0 2 4 6
Allungamento
Ener
gia
Pote
nzia
le
Forza ElasticaK = 3.5 N/m 2
21)( kxxU =
L’Energia potenziale della forza elastica è una parabola con un minimo nel punto ad allungamento zero. Un minimo di potenziale (anche relativo) indica un punto di equilibrio stabile del sistema. Un punto cioè dove il corpo non è soggetto a forze.

Lavoro ed Energia Meccanica - Cap. 7 HRW 15
Esempi alla lavagna
Corpo in caduta libera + EnergieUso del principio di conservazione energia
:::::::::::::::::::::::::::::::::::::::::
Nota:
Anche questi argomenti trattati esclusivamente in Aula sono argomento di esame

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 1
Moto Armonico
Un materiale elastico è un materiale che ha la capacità di riacquistare la forma iniziale dopo essere stato compresso o deformato (p.es. la molla)
La forza necessaria per allungare o accorciare una molla (caso 1D) è linearmente proporzionale all’allungamento stesso. La costante di proporzionalità k è detta costante elastica
)( 0xxkF −=
La osservabile x0 rappresenta l’estensione della molla quando non è soggetta a forze, l’osservabile x indica l’attuale estensione della molla
• Se comprimo la molla la forza che esercito è negativa
• Se estendo la molla la forza che esercito è positiva
Per motivi di semplicità si considera sempre la molla di estensione nulla, cioè x0 = 0. E’ facile correggere i calcoli in caso contrario
0)( 00 <−=< xxkFxx
0)( 00 >−=> xxkFxx

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 2
Per il principio di azione e reazione la forza che esercita la molla è di modulo e direzione uguale ma opposta in verso
Che per semplicità viene scritta con x0 = 0
Il moto associato ad una forza del tipo F = -kx è detto moto armonico semplice e l’andamento della coordinata x in funzione del tempi è rappresentato da una sinusoide
)( 0xxkF −−=
kxF −=

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 3
L’escursione massima dalla posizione di equilibrio A è detta ampiezza del moto.
L’intervallo di tempo T impiegato per
compiere un ciclo è detto Periodo.
T1
=ν
Tw π2=
Frequenza
Pulsazione oVelocità angolare
kxdtxdmkxmakxF −=−=−=2
2
Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 4
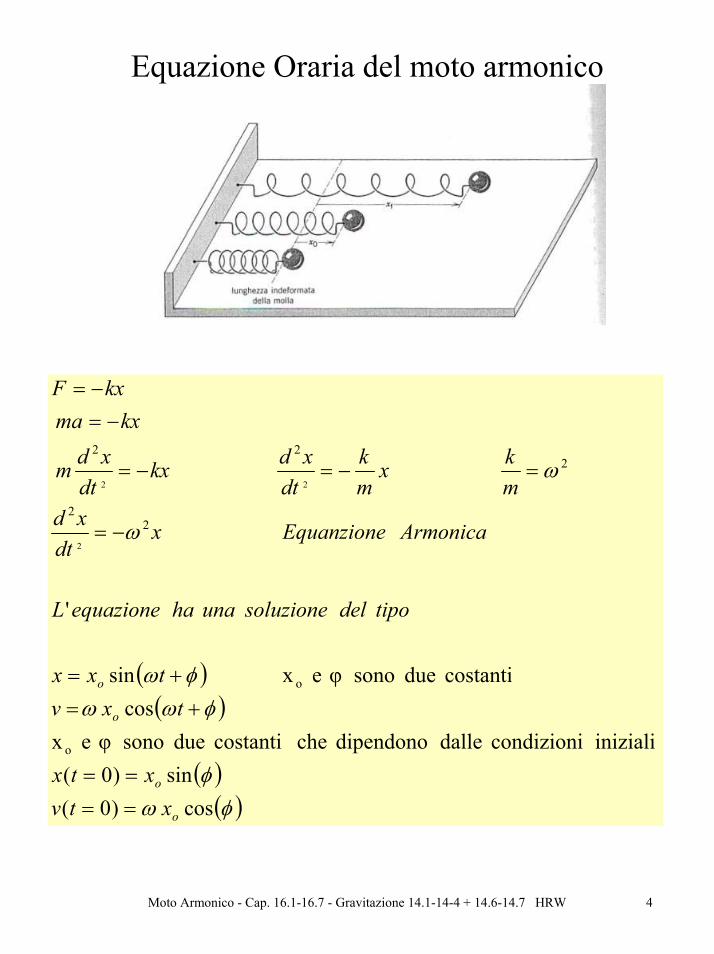
Equazione Oraria del moto armonico
( )( )
( )( )φω
φ
φωωφω
ω
ω
cos)0(sin)0(
inizialicondizionidalledipendonochecostantiduesonoφexcos
costantiduesonoφexsin
'
o
o
22
222
2
22
o
o
o
o
xtvxtx
txvtxx
tipodelsoluzioneunahaequazioneL
ArmonicaEquanzionexdtxd
mkx
mk
dtxdkx
dtxdm
kxmakxF
====
+=+=
−=
=−=−=
−=−=

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 5
Esempio
( )( )
)2/40(sin80002/40cos200
2/40sin5
16001601.01601.016
05001.0/16
22
22
ππ
π
+−=+=
+=
−=−=−=−=
=====
tatv
tx
xdtxdx
dtxdxaxF
vextperinizialiCondizioniKgmMNKSia
Diagramma Orario
-10
0
10
0 5 10 15 20 25 30 35 40
tempo (secondi)
X (m
etri)
Diagramma di Velocità
-500
0
500
0 5 10 15 20 25 30 35 40
tempo (secondi)
velo
cita
(m
/s)
Diagramma di Accelerazione
-10000
0
10000
0 5 10 15 20 25 30 35 40
tempo (secondi)
acc.
(m/s
2)

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 6
La forza elastica, che induce una oscillazione armonica, è una forza conservativa con potenziale
ARif.
F ds
F
ds
2
22
21)(
0
21
21
21)(
)()(
2
A
rif
rifA
X
X
X
X
X
X
Rif
A
KXAU
XSe
KXKXKxAU
KxdxdsKxdsFRifALAU
rif
A
Rif
A
Rif
A
=
=
−+=
−=
−=⋅−=⋅=→= ∫∫∫

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 7
La forza elastica o il potenziale armonico sono gli stereotipi di un gran numero di sistemi fisici, in pratica di tutti i fenomeni in cui è
presente una oscillazione come ad esempio il pendolo
Pendolo

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 8
Pendolo
( )( )
( )( )θτ
θ
θτθ
τ
cossin
0cossin
mgmgma
mgFmgF
jmgmaF
x
y
x
=−=
=−=−=
+−==∧
-mg
τX
θ
θ
Y
Lo spostamento su una circonferenza può essere scritto come
se l’angolo θ è sufficientemente piccolo allora
l’equazione che descrive dal pendolo
θrx =
θθ ≈)sin(
( )2
2
2
2
2
2
dtdmr
dtrdm
dtxdmmaF xx
θθ====
θθ mgdtdmr −≈2
2
( ) θθ mgmgFx −≈−= sin
( )ttrg ωθθθ sinsin 00 =
=

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 9
Legge di Gravitazione Universale
Ogni oggetto nell’universo con massa esercita una forza di attrazione gravitazionale verso qualsiasi altro oggetto massivo e subisce l’attrazione gravitazionale di tutti gli altri oggetti massivi dell’universo
In realtà anche gli oggetti senza massa (i fotoni, …. ) subiscono ed esercitano l’attrazione gravitazione gravitazionale
La mela attira la TerraLa Terra attira la mela
La Luna attira la TerraLa Terra attira la Luna
E’ un tipico esempio della III legge di Newton (legge di azione e reazione)

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 10
Legge di Gravitazione Universale
Una particella puntiforme di massa M1 attira gravitazionalmente (ed è attratta gravitazionalmente) una massa puntiforme M2 con una forza di modulo:
E direzione lungo la retta congiungente le due masse
221
rMMGF =
Questa legge è valida per una particella dell’atmosfera terrestre, per una particella puntiforme della famosa mela, della luna, delle stelle o di qualsiasi altro corpo presente nell’universo
G = 6.67 10-11 m3/(Kg s2) Costante di gravitazione universale

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 11
Nota:
La legge è vera per particelle puntiformi, cosa succede per un corpo come la Terra che ha una forma ….. ?
Principio di Sovrapposizione:
Dato un insieme di particelle puntiformi, la forza gravitazionale netta esercitata su ciascuna di esse è data dalla somma dei singoli effetti.
∑=
− =n
iiNet FF
211
Un corpo con una forma ed un volume può essere quindi scomposto in volumetti infinitesimi a cui applicare il principio di sovrapposizione
∫∑ ⇒⇒= ∞→=
− Voln
n
iiNet dFFF
211

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 12
Nota:
Si può dimostrare che una sfera di materiale uniforme di massa M da un punto di vista gravitazionale è perfettamente equivalente ad un punto materiale della medesima massa posto al suo centro. Quindi una sfera di materiale uniforme attira una particella posta al suo esterno come se tutta la massa fosse concentrata nel suo centro.
Nota:
Sulla Superficie terrestre la forza di gravità vale:
Nota:
La forza gravitazionale è una forza conservativa e quindi ammette un potenziale
( )MgMF
MgMMRMG
rMMGF
T
T
==
=⋅
⋅=== −
8.96370000
1098.51067.6 2
2411
2221

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 13
L’energia potenziale di una massa puntiforme nel punto generico A si può calcolare a partire dalla definizione stessa di energia potenziale.
L’energia potenziale posseduta da una massa puntiforme m0 nel punto A (xA,yA,zA) immersa in un campo gravitazionale generato dalla massa puntiforme M è dato dal lavoro necessario portare la carica da A ad un punto di riferimento P
dsrrMmGdsFAU
ll
⋅=⋅= ∫∫ 20)(
Se considero il punto di riferimento all’infinito l’energia potenziale di una massa puntiforme m0 posta nel punto A all’interno del campo gravitazionale generato dalla massa M distante da m0 rA è dato da:
−=
ArMmGAU 0)(
Poiché il lavoro non dipende dalla traiettoria posso scegliere una traiettoria ‘facile’ per andare da A a P
1) Mi muovo su un arco di circonferenza di centro in M da A al punto B Poiché lo spostamento è ortogonale alla forza (radiale) il lavoro è nullo
2) Mi muovo in direzione radiale da B a P
Mm0
A(xA,yA,zA)
m0
P(xrif,yrif,zrif)B dr
rMmGAU
PA∫>−
⋅= 20)(
−−=
−=
−=
=−=⋅= ∫∫
>−>−
rifAAP
BP
P
BPBPA
rrGMm
rrGMmAU
rrGMm
rGMmdr
rGMmds
rMmGAU
1111)(
1111)(
00
002020 Notare che la forza è
antiparallela allo spostmento

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 14
Le tre leggi di Keplero per il moto planetario sono delle conseguenze della legge di gravitazione universale
1° LeggeTutti i pianeti si muovono su orbite ellittiche, di cui il sole occupa uno dei fuochi
2° Legge
Il segmento che collega un pianeta al sole descrive aree uguali in tempi uguali
3° Legge
Il quadrato del periodo di un pianeta è proporzionale al cubo del semiasse maggiore della sua orbita
3
2
3
2
3
2
3
2
D
D
C
C
B
B
A
A
RT
RT
RT
RT
===

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 15
Gli astronauti sullo Space-Shuttle sentono la forza di gravità terrestre ?
Filmato
Calcoliamola
( ) ( ) AstAstT
Ast
orbT
Torbita
AstAstT
TAstTSuperficie
MMMGMRRMGF
MMRMG
rMMGF
3.710000006370000
8.9
22
22
=+
=+
=
===
Se la forza di gravità è 2/3 quella sulla superficie terrestre perché lo shuttle non precipita ?
Lo stesso vale per la Luna !
Perché la Luna non colpisce la terra

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 16
Come faccio a mandare in orbita un satellite ?

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 17
Lo Space Shuttle come qualsiasi altro satellite in orbita (Luna compresa) ruota attorno alla terra
Poichè il suo moto NON è rettilineo uniforme allora sentirà una forza centrifuga
T
ω
FgFcent
Un satellite ‘entra in orbita’ quando Fg=FCent
23
22 ωω ==
rMGrM
rMMG T
satsatT

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 18
Nota sull’energia meccanica
Forza Elastica
( ) ( )
( )
( )( ) tesanonmollaafermoècorpoilAEse
sempreAE
sempremvAE
semprexkAU
AUAEAE
m
m
k
km
A
A
00
021)(
021
)(
2
2
=>
>=
>=
+=
Forza Gravitazionale
( ) ( )
( )
( )( )
( ) ( ) ( ) ( )
( ) confinatoèmotoil:morale
0)(0vovepuntoilAsiainfatti
mdaRdipiusiallontanarpuònonAmassalaallora0nullaonegativapositiva,esserepuò
021)(
0
)(
1
1
2
1
AEmGmR
AUAEvseAUAEAE
AEseAE
sempremvAE
semprermmGAU
AUAEAE
m
A
mkm
m
m
k
A
km
A
=
==+==
<
>=
<−=
+=

Moto Armonico - Cap. 16.1-16.7 - Gravitazione 14.1-14-4 + 14.6-14.7 HRW 19
( ) ( )
( )
( )( )
( ) ( ) ( ) ( )( ) ( ) assurdo00ma
0)(0voveAassurdopersia
0vovepuntounesistenoninfatti
malegataènonmallora0nullaonegativapositiva,esserepuò
021)(
0
)(
1A
2
1
<>==+=
==
>
>=
<−=
+=
AUeAEAUAEvseAUAEAE
AEseAE
sempremvAE
semprermmGAU
AUAEAE
m
mkm
m
m
k
A
km
A
Urti - Cap. 10 HRW 1
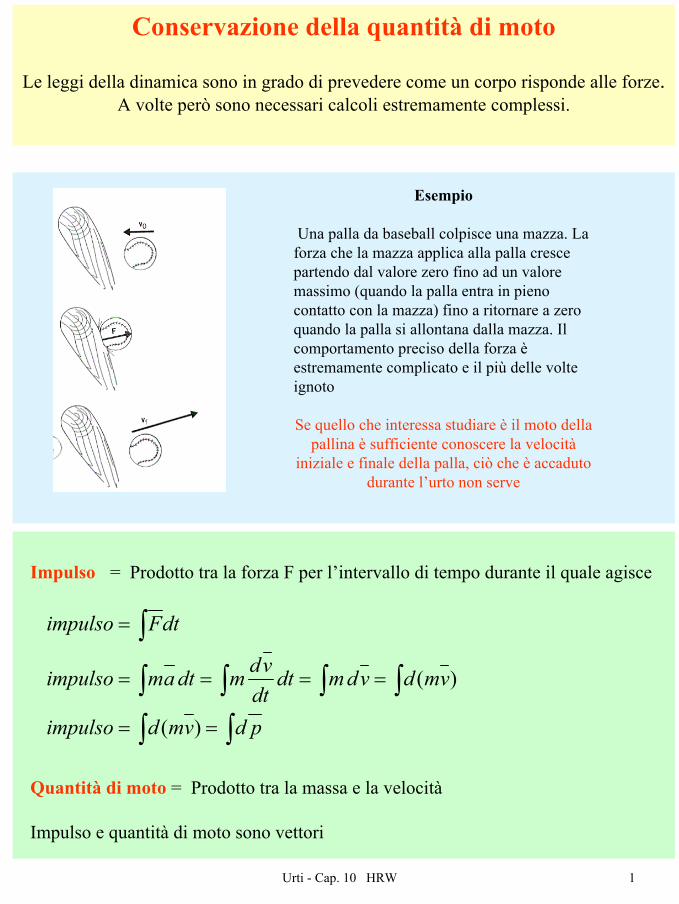
Conservazione della quantità di moto
Le leggi della dinamica sono in grado di prevedere come un corpo risponde alle forze.A volte però sono necessari calcoli estremamente complessi.
Esempio
Una palla da baseball colpisce una mazza. La forza che la mazza applica alla palla cresce partendo dal valore zero fino ad un valore massimo (quando la palla entra in pieno contatto con la mazza) fino a ritornare a zero quando la palla si allontana dalla mazza. Il comportamento preciso della forza è estremamente complicato e il più delle volte ignoto
Se quello che interessa studiare è il moto della pallina è sufficiente conoscere la velocità
iniziale e finale della palla, ciò che è accaduto durante l’urto non serve
Impulso = Prodotto tra la forza F per l’intervallo di tempo durante il quale agisce
∫∫∫∫∫∫
∫
==
====
=
pdvmdimpulso
vmdvdmdtdtvdmdtamimpulso
dtFimpulso
)(
)(
Quantità di moto = Prodotto tra la massa e la velocità
Impulso e quantità di moto sono vettori

Urti - Cap. 10 HRW 2
Teorema impulso - quantità di moto
Se su un corpo agisce una forza risultante F, l’impulso della forza risultante è uguale alla variazione della quantità di moto del corpo
Dati due corpi che urtano tra loro
Forze interne:
Forze che I corpi all’interno del sistema esercitano l’uno sull’altro (urto)
Forze esterne:
Forze esercitate sui corpi del sistema da agenti esterni al sistema (p.es. Gravità)
( ) ( ) ( ) ( )
( ) ( ) ( )( )( ) 0int
2,021,012,21,1int
2,02,21,01,121122,1,
2,02,2212,1,01,1121,
ppdtFF
vmvmvmvmdtFF
vvmvvmdtFFFF
vvmdtFFvvmdtFF
fext
ffext
ffextext
fextfext
−=Σ+Σ
−−+=Σ+Σ
−+−=+++
−=+−=+
∫∫∫
∫∫
Per il principio di azione e reazione la somma delle forze interne è nulla
( ) 0ppdtF fext −=Σ∫Se la somma delle forze esterne è nulla
00 0 pppp ff ==−

Urti - Cap. 10 HRW 3
Principio di conservazione della quantità di moto
La quantità di moto totale (la risultante della somma vettoriale delle quantità di moto dei singoli corpi) di un sistema ove la risultatnte delle forze esterne è nulla rimane
costante (si conserva).
1
221
22110
mvm
v
vmvmpp
ff
ff
fo
−=
+=
=
Esempio
22112,021,01
22,
21,
22,0
21,0
.,,,
21
21
21
21
ff
ff
fo
fcinocinfMoM
vmvmvmvm
mvmvmvmv
pp
EEEE
+=+
+=+
=
=⇒=
Esempio
( )( )( )
1,021
12,1,0
21
211,
2,21,1,0122111,01
22,21,1,01,1,01
22,
21,
21,0
2
21
21
21
vmm
mvvmmmmv
vmvvmvmvmvm
vmvvvvmmvmvmv
ff
ffff
fffff
+
=
+−
=
=−⇒+=
=+−⇒+=

Urti - Cap. 10 HRW 4
Applet

Urti - Cap. 10 HRW 5
Nota: L è un vettoreDipende dal Punto PE’ sempre ortogonale alla velocità ed al
vettore posizione
Momento Angolare
Si definisce momento angolare di un corpo di massa m, velocità v rispetto ad punto P il vettore L:
ω2mrprvmrL =∧=∧=
Nota: Il momento angolare è calcolato SEMPRE rispetto ad un punto
v
r
LP
Un corpo che si muove radialmente rispetto al punto P ha momento angolare nullo
v
rL=0
P
( ) 00sin ==∧= mvrvmrL
Un corpo che si muove di moto circolare uniforme con centro nel punto P ha momento angolare costantev
r
LP
( ) mvrmvrvmrL ==∧= 90sin

Urti - Cap. 10 HRW 6
Un corpo con momento angolare non nullo non è detto che abbia una traiettoria cruva
Un corpo che si muove in moto rettilineo uniforme può avere momento angolare non nullo
( ))(sin)()( tmvtrvmtrL ϑ=∧=vr
L
P
θ
Momento della forza M
Si definisce momento della forza M di un corpo rispetto ad punto P il prodotto vettoriale tra la forza che agisce sul corpo e il vettore che
congiunge P al corpo:
FrM ∧=
Nota: M è un vettoreDipende dal Punto PE’ sempre ortogonale alla Forza ed al
vettore posizione
Nota: Il momento della forza è calcolato SEMPRE rispetto ad un punto
F
r
M
P

Urti - Cap. 10 HRW 7
A partire dalle definizione di momento angolare e momento della forza è possibile riscrivere la seconda equazione di Newton in termini di M ed L
( )dtLd
dtvmrdM
dtvdmrFr
dtvdamF
=∧
=
∧=∧
== Il momento della forza è pari alla derivata rispetto al tempo del momento angolare
Urti - Cap. 10 HRW 8
Principio di conservazione del Momento Angolare:
Se il momento delle forze esterne agenti su un sistema è nullo, allora il Momento Angolare Totale Ltot si conserva.
Vale sia vettorialmente che per una sola componente
In un sistema composto da un corpo:
Quando si conserva Lz il corpo si muove con velocità angolare costanteQuando si conserva L allora il moto avviene su un piano
Forza Centrale
Una forza si dice centrale quando la sua intensità dipende solo ed esclusivamente dalla distanza della sorgente ed il verso è radiale
• La forza di gravità è una forza centrale
• La forza elettrostatica è una forza centrale
L’esempio tipico sulla conservazione del momento angolare è la ballerina che ruotando su se stessa ritrae le braccia. La sua velocità angolare aumenta
ω2mrmvrL ==