IT i · 2019. 10. 30. · 6. La funzione di trasferimento G(s)=Y (s) X(s) corrispondente...
18
Cognome: Nome: N. Matr.: Ho seguito il corso con Prof Giarr´ e Prof. Biagiotti Controlli Automatici - Parte A Ingegneria Meccanica e Ingegneria del Veicolo Compito del 12 gennaio 2018 - Quiz Per ciascuno dei seguenti quesiti (si considerino solo le domande numerate normalmente o che recano il nome del docente con cui si ` e seguito il corso ), segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti possono avere pi` u risposte corrette. I quiz si ritengono superati se vengono individuate almeno met` a delle risposte esatte (punti 5.5 su 11), diversa- mente il compito verr`a ritenuto insufficiente a prescindere dal risultato della seconda prova. 1. Quali dei seguenti sistemi sono semplicemente stabili? G(s)= s +2 s 2 (s + 3)(2s + 1) G(s)= s - 2 (3s + 1)(s 2 + 4) G(s)= s +2 s(s 2 + 1)(s + 3) G(s)= s +2 (3s + 1)(s 2 - 4) 2. Per ω =1/τ il diagramma “reale” di Bode delle ampiezze della funzione G(j ω)= 1 1+jτω vale 1 vale -3 dB vale 3 dB vale 1/2 3. Il metodo della Trasformata di Laplace nella risoluzione di equazioni differenziali lineari a parametri concentrati permette di calcolare la risposta libera del sistema permette di calcolare la risposta forzata del sistema pu` o essere utilizzato solo nel caso di equazioni tempo invarianti pu` o essere utilizzato anche nel caso di equazioni tempo varianti 4. Sia L[f (t)] = F (s) la trasformata di Laplace della funzione f (t). Vale la relazione: L df dt = 1 s F (s) - f (0 - ) L df dt = sF (s) L df dt = sF (s) - f (0 - ) L df dt = 1 s F (s) 5. Il valore iniziale della risposta al gradino unitario del sistema G(s)= s 3 +2s 2 + 12 5s 3 +3s 2 + s +2 ` e pari a: ∞ 0 1/5 6 IT i
Transcript of IT i · 2019. 10. 30. · 6. La funzione di trasferimento G(s)=Y (s) X(s) corrispondente...

Cognome: Nome: N. Matr.:!!!!!!
Ho seguito il corso con Prof Giarre ! Prof. Biagiotti !
Controlli Automatici - Parte AIngegneria Meccanica e Ingegneria del Veicolo
Compito del 12 gennaio 2018 - Quiz
Per ciascuno dei seguenti quesiti (si considerino solo le domande numerate normalmente o che recano il nomedel docente con cui si e seguito il corso), segnare con una crocetta le risposte che si ritengono corrette. Alcuniquesiti possono avere piu risposte corrette.I quiz si ritengono superati se vengono individuate almeno meta delle risposte esatte (punti 5.5 su 11), diversa-mente il compito verra ritenuto insufficiente a prescindere dal risultato della seconda prova.
1. Quali dei seguenti sistemi sono semplicemente stabili?
©G(s) =s+ 2
s2(s+ 3)(2s+ 1)©G(s) =
s− 2
(3s+ 1)(s2 + 4)
© G(s) =s+ 2
s(s2 + 1)(s+ 3)© G(s) =
s+ 2
(3s+ 1)(s2 − 4)
2. Per ω = 1/τ il diagramma “reale” di Bode delle ampiezze della funzione G(jω) = 11+jτω
© vale 1
© vale # −3 dB
© vale # 3 dB
© vale 1/2
3. Il metodo della Trasformata di Laplace nella risoluzione di equazioni differenziali lineari a parametriconcentrati
© permette di calcolare la risposta libera del sistema
© permette di calcolare la risposta forzata del sistema
© puo essere utilizzato solo nel caso di equazioni tempo invarianti
© puo essere utilizzato anche nel caso di equazioni tempo varianti
4. Sia L[f(t)] = F (s) la trasformata di Laplace della funzione f(t). Vale la relazione:
© L[
dfdt
]
= 1sF (s)− f(0−)
© L[
dfdt
]
= sF (s)
© L[
dfdt
]
= sF (s)− f(0−)
© L[
dfdt
]
= 1sF (s)
5. Il valore iniziale della risposta al gradino unitario del sistema G(s) =s3 + 2s2 + 12
5s3 + 3s2 + s+ 2e pari a:
© ∞
© 0
© 1/5
© 6
IT i

6. La funzione di trasferimento G(s) = Y (s)X(s) corrispondente all’equazione differenziale
...y + y + 3y = 4x+ 2x+ 3x e:
© G(s) =s3 + s2 + 3s
4s2 + 2s+ 3
© G(s) =4s2 + 2s+ 3
s2 + s+ 3
© G(s) =4s2 + 2s+ 3
s3 + s2 + 3s
© G(s) =s2 + s+ 3
4s2 + 2s+ 3
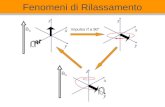
7. La risposta del sistema di cui in figura sono riportati idiagrammi di Bode al segnale x(t) = 2 cos(4t) risulta:
© y(t) ≈ 17 cos(4t+ 36o)
© y(t) ≈ 20 cos(4t− 36o)
© y(t) ≈ 32 cos(4t− 100o)
© y(t) ≈ 17 cos(4t− 36o) −60
−50
−40
−30
−20
−10
0
10
20
30
40
Mag
nitu
de (d
B)
10−1 100 101 102−180
−135
−90
−45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/s)
8. Sia G(s) una funzione razionale fratta in s con grado relativo ρ. La scomposizione in fratti semplici dellafunzione G(s) mediante il metodo dei residui:
© e sempre possibile
© e possibile solo se ρ ≥ 0
© e possibile solo se ρ > 0
© e possibile solo se ρ < 0
9. Linearizzando il sistema
x1(t) = x31(t) + u(t)
x2(t) = x1(t) + x22(t)
y(t) = x1(t)x2(t) +√
u(t)
intorno al punto di equilibrio x =
[
−11
]
, u = 1 si ottiene un sistema Lineare Tempo-Invariante
caratterizzato dalle matrici
© A =
[
3 01 2
]
, B =
[
10
]
, C = [1 − 1], D =12
© A =
[
3 10 2
]
, B =
[
10
]
, C = [1 − 1], D =12
© A =
[
3 01 2
]
, B =
[
11
]
, C = [1 − 1], D =12
© A =
[
3 11 2
]
, B =
[
01
]
, C = [1 − 1], D =12
¥2145711 a: 2cm 4Tcn CateÈ")

Cognome: Nome: N. Matr.:!!!!!!
Ho seguito il corso con Prof. Giarre ! Prof. Biagiotti !
Controlli Automatici - Parte AIngegneria Meccanica e Ingegneria del Veicolo
Compito del 12 gennaio 2018 - Esercizi
Rispondere in maniera analitica ai seguenti quesiti (gli studenti dovranno rispondere ai quesiti contrassegnatisolo con lettere o col nome del docente di cui hanno seguito il corso piu una lettera). I problemi e le domande arisposta aperta si ritengono superati se vengono conseguiti almeno meta dei punti totali (11 su 22), diversamenteil compito verra ritenuto insufficiente a prescindere dal risultato della prima prova.
a) Determinare la trasformata di Laplace Xi(s) dei seguenti segnali temporali xi(t):
x1(t) = 2δ(t) +e−t
3sin(5t), x2(t) = 3t3 e−3t + 2
b) Calcolare la risposta impulsiva gi(t) delle seguenti funzioni di trasferimento Gi(s):
G1(s) =2s2 + 7s+ 3
s2 + s, G2(s) =
5s2 + 18s+ 4
(s+ 2)2(s− 1)
c) Dato il seguente schema a blocchi:
X(s) Y (s)A B
C
DE−
−
−
utilizzando la formula di Mason calcolare la funzione di trasferimento G(s) che lega l’ingresso X(s)all’uscita Y (s).
d) Sia data la funzione di trasferimento G(s) =(s− 5)
(s2 + 2s+ 5)(s+ 10)(1 + 0.01s)Disegnare l’andamento qualitativo della risposta y(t) a un gradino in ingresso di ampiezza 10, x(t) =10. Calcolare il valore a regime y∞ dell’uscita y(t) del sistema, stimare qualitativamente il tempo diassestamento Ta del sistema e il periodo Tω dell’eventuale oscillazione smorzata.

e) Sia dato il seguente sistema retroazionato:
!e(t)
! K ! "
d(t)
!
G(s)
(s− 2)
s(s2 + 4s+ 100)(s+ 30)!
#
r(t) y(t)
e.1) Determinare per quali valori del parametro K il sistema retroazionato e asintoticamente stabile.
e.2) Posto K = −1000, calcolare l’errore a regime e(∞) quando sul sistema retroazionato viene applicatoil segnale r(t) = 1 + 2t (mentre il disturbo d(t) = 0).
e.3) Tracciare (nello schema fornito in allegato) i diagrammi asintotici di Bode delle ampiezze e delle fasidella funzione G(s).
Biagiotti - e.4) Tracciare qualitativamente il luogo delle radici del sistema retroazionato per valori negativi del pa-rametro K. Determinare esattamente gli asintoti, il centro degli asintoti, le intersezioni con l’asseimmaginario e i corrispondenti valori del guadagno K.
Giarre - e.4) Disegnare qualitativamente il diagramma di Nyquist della funzione di risposta armonica G(jω) pervalori positivi della pulsazione. Calcolare esattamente la posizione σ0 di un eventuale asintoto, leeventuali intersezioni con l’asse reale e i corrispondenti valori delle pulsazioni.
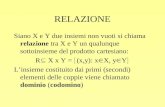
f) Si faccia riferimento ai diagrammi di Bode della funzione G(s) mostrati in figura.
-100
-80
-60
-40
-20
0
20
Mod
ulo
M [d
b]
10-1 100 101 102
Pulsazione ω [rad/s]
-360
-270
-180
-90
0
Fase
φ [g
radi
]
f.1) Ricavare l’espressione analitica della funzione G(s).
f.2) Valutare in maniera approssimata la risposta a regime y∞(t) del sistema G(s) quando in ingresso epresente il segnale:
x(t) = 5 cos (0.8 t) + 3 sin (10 t+ π/3) .
mi& ht

Cognome: Nome: N. Matr.:!!!!!!
Diagrammi di Bode
-160
-140
-120
-100
-80
-60
-40
-20
0
Mod
ulo
M [d
b]
10-1 100 101 102 103
Pulsazione ω [rad/s]
-630
-540
-450
-360
-270
-180
-90
0
Fase
φ [g
radi
]


Cognome: Nome: N. Matr.:!!!!!!
Ho seguito il corso con Prof Giarre ! Prof. Biagiotti !
Controlli Automatici - Parte AIngegneria Meccanica e Ingegneria del Veicolo
Compito del 12 gennaio 2018 - Quiz
Per ciascuno dei seguenti quesiti (si considerino solo le domande numerate normalmente o che recano il nomedel docente con cui si e seguito il corso), segnare con una crocetta le risposte che si ritengono corrette. Alcuniquesiti possono avere piu risposte corrette.I quiz si ritengono superati se vengono individuate almeno meta delle risposte esatte (punti 5.5 su 11), diversa-mente il compito verra ritenuto insufficiente a prescindere dal risultato della seconda prova.
1. Quali dei seguenti sistemi sono semplicemente stabili?
©G(s) =s+ 2
s2(s+ 3)(2s+ 1)
⊗
G(s) =s− 2
(3s+ 1)(s2 + 4)⊗
G(s) =s+ 2
s(s2 + 1)(s+ 3)© G(s) =
s+ 2
(3s+ 1)(s2 − 4)
2. Per ω = 1/τ il diagramma “reale” di Bode delle ampiezze della funzione G(jω) = 11+jτω
© vale 1⊗
vale # −3 dB
© vale # 3 dB
© vale 1/2
3. Il metodo della Trasformata di Laplace nella risoluzione di equazioni differenziali lineari a parametriconcentrati⊗
permette di calcolare la risposta libera del sistema⊗
permette di calcolare la risposta forzata del sistema⊗
puo essere utilizzato solo nel caso di equazioni tempo invarianti
© puo essere utilizzato anche nel caso di equazioni tempo varianti
4. Sia L[f(t)] = F (s) la trasformata di Laplace della funzione f(t). Vale la relazione:
© L[
dfdt
]
= 1sF (s)− f(0−)
© L[
dfdt
]
= sF (s)⊗
L[
dfdt
]
= sF (s)− f(0−)
© L[
dfdt
]
= 1sF (s)
5. Il valore iniziale della risposta al gradino unitario del sistema G(s) =s3 + 2s2 + 12
5s3 + 3s2 + s+ 2e pari a:
© ∞
© 0⊗
1/5
© 6
ad
•
⑨
:•
a
÷
• limes) = I }s→ao 5
[ "÷:#lineSso

6. La funzione di trasferimento G(s) = Y (s)X(s) corrispondente all’equazione differenziale
...y + y + 3y = 4x+ 2x+ 3x e:
© G(s) =s3 + s2 + 3s
4s2 + 2s+ 3
© G(s) =4s2 + 2s+ 3
s2 + s+ 3⊗
G(s) =4s2 + 2s+ 3
s3 + s2 + 3s
© G(s) =s2 + s+ 3
4s2 + 2s+ 3
7. La risposta del sistema di cui in figura sono riportati idiagrammi di Bode al segnale x(t) = 2 cos(4t) risulta:
© y(t) ≈ 17 cos(4t+ 36o)
© y(t) ≈ 20 cos(4t− 36o)
© y(t) ≈ 32 cos(4t− 100o)⊗
y(t) ≈ 17 cos(4t− 36o) −60
−50
−40
−30
−20
−10
0
10
20
30
40
Mag
nitu
de (d
B)
10−1 100 101 102−180
−135
−90
−45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/s)
8. Sia G(s) una funzione razionale fratta in s con grado relativo ρ. La scomposizione in fratti semplici dellafunzione G(s) mediante il metodo dei residui:
© e sempre possibile
© e possibile solo se ρ ≥ 0⊗
e possibile solo se ρ > 0
© e possibile solo se ρ < 0
9. Linearizzando il sistema
x1(t) = x31(t) + u(t)
x2(t) = x1(t) + x22(t)
y(t) = x1(t)x2(t) +√
u(t)
intorno al punto di equilibrio x =
[
−11
]
, u = 1 si ottiene un sistema Lineare Tempo-Invariante
caratterizzato dalle matrici
⊗
A =
[
3 01 2
]
, B =
[
10
]
, C = [1 − 1], D =12
© A =
[
3 10 2
]
, B =
[
10
]
, C = [1 − 1], D =12
© A =
[
3 01 2
]
, B =
[
11
]
, C = [1 − 1], D =12
© A =
[
3 11 2
]
, B =
[
01
]
, C = [1 − 1], D =12
(s'+SI Y =
• →(45725+3) Ucs)Gestiva
Ucs)
1g ←- -- - - - - -- .- - - - - --
§4 ;
i
• oi
✓po'
= 8.9-36 - - - - - . . . .
. . .
;de 2. sarta !
'a iris !
-
•d e- E:B "
⇒de)
•
-ci" E !
•a ÷:L:DBee ce-fexd.fiD= 42 -G - il
"

Cognome: Nome: N. Matr.:!!!!!!
Ho seguito il corso con Prof. Giarre ! Prof. Biagiotti !
Controlli Automatici - Parte AIngegneria Meccanica e Ingegneria del Veicolo
Compito del 12 gennaio 2018 - Esercizi
Rispondere in maniera analitica ai seguenti quesiti (gli studenti dovranno rispondere ai quesiti contrassegnatisolo con lettere o col nome del docente di cui hanno seguito il corso piu una lettera). I problemi e le domande arisposta aperta si ritengono superati se vengono conseguiti almeno meta dei punti totali (11 su 22), diversamenteil compito verra ritenuto insufficiente a prescindere dal risultato della prima prova.
a) Determinare la trasformata di Laplace Xi(s) dei seguenti segnali temporali xi(t):
x1(t) = 2δ(t) +e−t
3sin(5t), x2(t) = 3t3 e−3t + 2
SOLUZIONE:
X1(s) = 2 +1
3
5
(s+ 1)2 + 25, X2(s) =
18
(s+ 3)4+
2
s,
b) Calcolare la risposta impulsiva gi(t) delle seguenti funzioni di trasferimento Gi(s):
G1(s) =2s2 + 7s+ 3
s2 + s, G2(s) =
5s2 + 18s+ 4
(s+ 2)2(s− 1)
SOLUZIONE:
La funzione G1(s) puo essere riscritta come
G1(s) = 2 +3
s+
2
s+ 1
pertanto la sua risposta impulsiva risulta
g1(t) = 2δ(t) + 3 + 2 e−t.
La funzione G2(s) puo essere riscritta come
G2(s) =4
(s+ 2)2+
2
(s+ 2)+
3
(s− 1)
di conseguenza la sua risposta impulsiva risulta
g2(t) = 4te−2t + 2e−2t + 3et
c) Dato il seguente schema a blocchi:
X(s) Y (s)A B
C
DE−
−
−
sente ) =
g-fctètn Festa) 5-
{0 5425
fai:#⇒ ¥."÷÷
corpo -1ft YI,tsoshtpesttistf ,è--
sesti )
frèmereBias 1
Bel
F- ÉTÉ
ÈtereLe ac

utilizzando la formula di Mason calcolare la funzione di trasferimento G(s) che lega l’ingresso X(s)all’uscita Y (s).
SOLUZIONE:
G(s) =Y (s)
X(s)=
AB +AD − ED(1 +AC)
1 +AC
d) Sia data la funzione di trasferimento G(s) =(s− 5)
(s2 + 2s+ 5)(s+ 10)(1 + 0.01s)Disegnare l’andamento qualitativo della risposta y(t) a un gradino in ingresso di ampiezza 10, x(t) =10. Calcolare il valore a regime y∞ dell’uscita y(t) del sistema, stimare qualitativamente il tempo diassestamento Ta del sistema e il periodo Tω dell’eventuale oscillazione smorzata.
SOLUZIONE:
I poli dominanti del sistema sono complessi coniugati p1,2 = σ ± jω = −1± j2, per cui la risposta al gradinoavra un andamento qualitativo di tipo oscillatorio smorzato, come mostrato in figura
0 1 2 3 4 5 6 7 8-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
y∞
t [s]
y(t)
Ta
Il valore a regime dell’uscita per un gradino in ingresso di ampiezza A = 10 risulta
y∞ = AG(0) = 10 · (−0.1) = −1
Il tempo di assestamento Ta e
Ta =3
|σ|=
3
1= 3 s,
e il periodo dell’oscillazione
Tω =2π
ω= π s.
E presente anche uno zero a fase non minima in 5, che produce una sovraelongazione iniziale (considerandoche il valore finale e negativo).
Hs ) : F (1- si'Èf
⇒← c-sera
- a 0ta u=
÷ÉÀ. AH• Yoo = -1
t . -
→ --
;- - -
- - --
3
tuttidotati=3. 14 ci = 2
pdicotjww.az/

e) Sia dato il seguente sistema retroazionato:
!e(t)
! K ! "
d(t)
!
G(s)
(s− 2)
s(s2 + 4s+ 100)(s+ 30)!
#
r(t) y(t)
e.1) Determinare per quali valori del parametro K il sistema retroazionato e asintoticamente stabile.
SOLUZIONE:
L’equazione caratteristica del sistema retroazionato e
1 +K(s− 2)
s(s2 + 4s+ 100)(s+ 30)= 0 → s4 + 34s3 + 220s2 + (3000 +K)s− 2K = 0
La corrispondente tabella di Routh e la seguente
4 1 220 −2K3 34 3000 +K2 4480−K −68K → K < 44801 (4480−K)(3000 +K) + 2312K → −2231.3 < K < 6023.30 −68K → K < 0
Quindi il sistema retroazionato e asintoticamente stabile per:
K∗ = −2231.3 < K < 0
La pulsazione ω∗ corrispondente al valore limite K∗ e:
ω# =
√
3000 +K∗
34# 4.75 rad/s
e.2) Posto K = −1000, calcolare l’errore a regime e(∞) quando sul sistema retroazionato viene applicatoil segnale r(t) = 1 + 2t (mentre il disturbo d(t) = 0).
SOLUZIONE:
Dato che il sistema e lineare e soggetto quindi alla sovrapposizione degli effetti, l’errore e(t) risultera:
e(t) = er1(t) + er2(t)
dove er1(t) e l’errore dovuto alla componente r1(t) = 1 del riferimento mentre er2(t) e l’errore dovutoalla componente r2(t) = 2t del riferimento. Senza fare alcun calcolo si puo dire che a regime er1(∞) saranullo, in quanto si considera un ingresso a gradino in un sistema di tipo 1 (cioe con un polo nell’origine),mentre er2(∞) sara costante ma diverso da zero in quanto si considera un ingresso a rampa in un sistemadi tipo 1. L’errore a regime sara quindi dato da:
e(∞) = er2(∞) =R0
Kv=
223
= 3
dove R0 = 2 e la pendenza della rampa e Kv e dato da
lims→0
sKG(s) =2
3
e.3) Tracciare (nello schema fornito in allegato) i diagrammi asintotici di Bode delle ampiezze e delle fasidella funzione G(s).
SOLUZIONE:
Vedi figura in fondo.
- (aaa .-2 ( 1 - siL )
E resterete÷::*-
→
✓
← ⇐
§

Biagiotti - e.4) Tracciare qualitativamente il luogo delle radici del sistema retroazionato per valori negativi del pa-rametro K. Determinare esattamente gli asintoti, il centro degli asintoti, le intersezioni con l’asseimmaginario e i corrispondenti valori del guadagno K.
SOLUZIONE:
Essendo 3 il grado relativo del sistema, esistono 3 asintoti che formano una stella con centro nel puntosull’asse reale di ascissa
σa =1
3(−4− 30− 2) = −12
Il luogo delle radici per K < 0 e riportato nella seguente figura.
-40 -30 -20 -10 0 10 20-30
-20
-10
0
10
20
30
σa
Root Locus
Real Axis (seconds-1)
Imag
inar
y A
xis (
seco
nds-1
)
Dall’analisi svolta mediante il criterio di Routh, risulta che il luogo delle radici attraversa l’asse immaginario,passando dal semipiano sinistro a quello destro, in corrispondenza di s∗ = ±jω∗ = ±j4.75, per K =K∗ = −2231.3.
Giarre - e.4) Disegnare qualitativamente il diagramma di Nyquist della funzione di risposta armonica G(jω) pervalori positivi della pulsazione. Calcolare esattamente la posizione σ0 di un eventuale asintoto, leeventuali intersezioni con l’asse reale e i corrispondenti valori delle pulsazioni.
SOLUZIONE:
Il diagramma di Nyquist della funzione G(s) e riportato in figura.
±

-2 -1.5 -1 -0.5 0 0.5 1 1.5 2×10-3
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2 ×10-3
σ0
La funzione approssimante per ω → 0 e
G0(s) =−2
3000 s
pertanto il diagramma parte all’infinito con fase iniziale ϕ0 = − 32π.
La funzione approssimante per ω → ∞ e
G∞(s) =1
s3
e quindi il diagramma giunge nell’origine con fase finale ϕ∞ = − 32π.
Il parametro ∆τ vale
∆τ = −1
2−
4
100−
1
30= −0.573 < 0
pertanto il diagramma parte in ritardo rispetto alla fase iniziale ϕ0.Il sistema e di tipo 1 pertanto esiste un asintoto verticale la cui ascissa e
σ0 =−2
3000∆τ = 0.0003822
Il parametro ∆p vale∆p = 2 + 4 + 30 = 36 > 0
pertanto il diagramma arriva in anticipo rispetto alla fase finale ϕ∞.Lo sfasamento complessivo e
∆ϕ = −2π
Esiste almeno un’intersezioni con l’asse reale che, in virtu dell’analisi svolta con Routh al primo punto,risulta
σ = −1/K# = 0.000448.
f) Si faccia riferimento ai diagrammi di Bode della funzione G(s) mostrati in figura.
-270
× -66 ×
-549µ
-360
× ×
17
stradeBY( tkrit )
-70:#ÈI:*mt
| - simtàdgo!

-100
-80
-60
-40
-20
0
20
Mod
ulo
M [d
b]
10-1 100 101 102
Pulsazione ω [rad/s]
-360
-270
-180
-90
0
Fase
φ [g
radi
]
f.1) Ricavare l’espressione analitica della funzione G(s).
SOLUZIONE:
G(s) =0.064( 1
0.8s+ 1)
s2( 125s
2 + 225s+ 1)
=2(s+ 0.8)
s2(s2 + 2s+ 25)
dove il valore µ = 0.064 si determina considernado l’approssimante in bassa frequenza della G(s)(caratterizzata da un doppio polo nell’origine - si noti la pendenza iniziale pari a -40 db/decade)
|G0(s)|s=0.8 j =∣
∣
∣
µ
s2
∣
∣
∣
s=0.8 j=
|µ|
0.82# −20 db # 0.1 → |µ| # 0.064.
Il segno sara positivo considerando la fase iniziale pari a −180o e la presenza dei due poli nell’origine chela determinano.
In corrispondenza di ω = 0.8 rad/s e presente uno zero reale negativo.
In corrispondenza di ω = 5 rad/s e presente una coppia di poli complessi coniugati (cartterizzati quindida ωn = 5) stabili con δ = 0.2. Infatti
δ =1
2Mωn
#1
2 · 2.5= 0.2.
La distanza Mωn# 8 db # 2.5 si legge dal diagramma di Bode dei moduli.
f.2) Valutare in maniera approssimata la risposta a regime y∞(t) del sistema G(s) quando in ingresso epresente il segnale:
x(t) = 5 cos (0.8 t) + 3 sin (10 t+ π/3) .
SOLUZIONE:
Essendo il sistema instabile (dal momento che e presente un polo doppio nell’origine) la risposta a regimea un qualunque ingresso (anche limitato) diverge, per cui y∞(t) = ∞.
13=-20da
-2 ?Mag Bad if
- n :i gatti
.0.8.ra . . no g.giro
µ gialle-
f. µperdenteii.74
-
. ①
la ←

Cognome: Nome: N. Matr.:!!!!!!
Diagrammi di Bode
-160
-140
-120
-100
-80
-60
-40
-20
0
Mod
ulo
M [d
b]
10-1 100 101 102 103
Pulsazione ω [rad/s]
-630
-540
-450
-360
-270
-180
-90
0
Fase
φ [g
radi
]
Hdd# Ygaoo → lotta↳ok? 's 40 ;!Ì;
pre
-e gasato
⑧ - - -e.ae#&Erg--------.@ar→
' ⑧
90
io@
a
GQe-2C1-slrjse.ieasfttf-X-Y-as.TL)

Gods) : § !letto
.
con -- E. '
⑤ fine?ftp.sd/--ÈDeroga#D== -88.62
-2 9.798=
} 8=24%-1.iq

Mr = a- = 2-55
28¥
Mrtob = 8.13dB .
È µ.. ÷
÷:•







![D ] o v } Z ] } Ì ] } v ^ X X X W/dK> dK ^W / > [ WW >dK …...î /E / Zd X í r K'' ddK >> [ WW >dK Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y Y](https://static.fdocumenti.com/doc/165x107/5f07e5077e708231d41f4a69/d-o-v-z-oe-v-x-x-x-wdk-dk-w-ww-dk-e-zd.jpg)
![TEORIA RELAZIONALE: INTRODUZIONE - DIMES Unical · ∀ t1, t2∈r. se t1[X] = t2[X] allora t1[Y] = t2[Y] • Si dice che un’istanza r0 di R soddisfa le DF X → Y (r0 |= X → Y)](https://static.fdocumenti.com/doc/165x107/5bdc5fd909d3f263278dd611/teoria-relazionale-introduzione-dimes-t1-t2r-se-t1x-t2x-allora.jpg)
![PRIMARIA ESPERTI AVVISO PER L'INDIVIDUAZIONE DI … PER L... · v } m x x x ] } ] } v } he/ k j _ ¦ í ó x ì ð ò u ì ì d/'>/kz/ y dk y / ¦ ð ð x î ñ ò u ì ì v s/^dK](https://static.fdocumenti.com/doc/165x107/5d5303b988c9931f2f8b892d/primaria-esperti-avviso-per-lindividuazione-di-per-l-v-m-x-x-x-.jpg)
![function [pres, pos] = cerca(x, v) · 2020. 11. 17. · x = [-1 : 0.1 : 1]; % invoco la funzione per plottare y = 3x +2 y = retta(3,2,x) figure plot(x,y, 'b*') % disegno con le stelline](https://static.fdocumenti.com/doc/165x107/60c0345b29780f5ead6c3fca/function-pres-pos-cercax-v-2020-11-17-x-1-01-1-invoco.jpg)