Calcolo del momento d’inerzia di un braccio robotico inerzia.pdf · Capitolo 1 1.1 Introduzione...
19
Calcolo del momento d’inerzia di un braccio robotico Basilio Bona Dipartimento di Automatica e Informatica Politecnico di Torino [email protected] Internal Report: DAUIN/BB/2006/09.01 Versione: 4 ottobre 2007 Momento*inerzia.tex
-
Upload
nguyentruc -
Category
Documents
-
view
218 -
download
0
Transcript of Calcolo del momento d’inerzia di un braccio robotico inerzia.pdf · Capitolo 1 1.1 Introduzione...
Calcolo del momento d’inerzia di unbraccio robotico
Basilio BonaDipartimento di Automatica e Informatica
Politecnico di Torino
Internal Report: DAUIN/BB/2006/09.01
Versione: 4 ottobre 2007
Momento*inerzia.tex

Capitolo 1
1.1 Introduzione
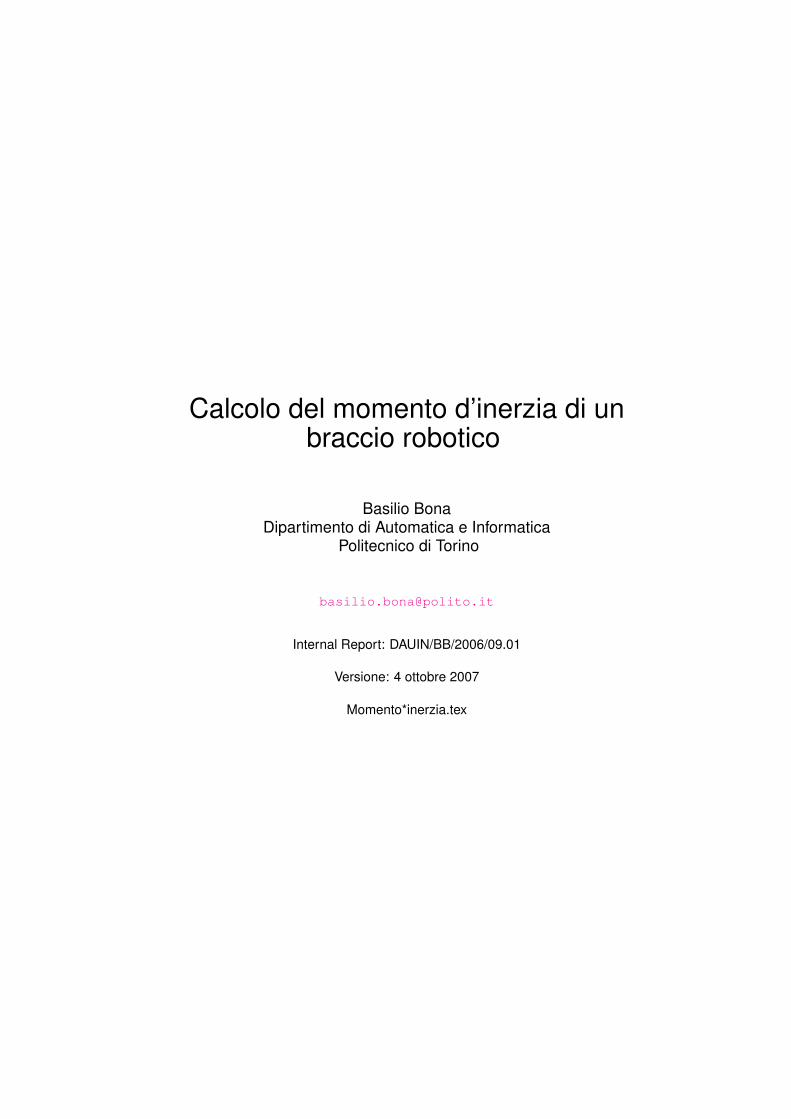
Questa breve dispensa ha lo scopo di presentare un esercizio completo di calcolo delmomento d’inerzia del braccio del robot planare illustrato in Fig. 1.1. Il braccio vienemodellato come un prisma avente centro di massa nel centro del riferimentoR0(x, y, z),con – alle estremita – due motori schematizzabili con due cilindri aventi entrambi asseparallelo all’asse z, come illustrato in Fig. 1.2.
I parametri che verranno usati nei calcoli sono raccolti nella Tabella seguente:
Parametro Significatoa emi-lunghezza prismab emi-larghezza prismac emi-altezza prismaa1 distanza tra l’asse z e l’asse del primo cilindroa2 distanza tra l’asse z e l’asse del secondo cilindror1 raggio del primo cilindror2 raggio del primo cilindroh1 altezza del primo cilindroh2 altezza del secondo cilindroM massa del prismam1 massa del primo cilindrom2 massa del secondo cilindro
V = 8abc volume del prima
ρ =M
8abcdensita del prisma
Tabella 1.1: Parametri del prisma assunto come braccio.
2

Basilio Bona - Calcolo del momento d’inerzia 3
1.2 Momento angolare e momenti d’inerzia
Prima di procedere e opportuno richiamare i concetti che definiscono il momento ango-lare di un corpo e i relativi momenti d’inerzia.
1.2.1 Sistema di masse puntiformi
Iniziamo a considerare un sistema di n masse puntiformi mi, (con i = 1, · · · , n), comeindicato schematicamente in Fig. 1.3.
Consideriamo un moto di pura rotazione intorno al punto fisso O definito dall’originedel sistema di riferimento cartesianoR0, rispetto al quale andremo a rappresentare tutti ivettori che ci servono. La i-esima massa mi si trova in una posizione definita dal vettorer i =
[xi yi zi
]T. Se la velocita istantanea di rotazione del sistema di masse vienedefinita dal vettore ω, risulta evidente che ogni massa verra ad assumere una velocitalineare v i per effetto della rotazione; il valore di tale velocita si ricava dalla ben notarelazione
v i = ω × r i (1.1)
dove il simbolo × indica il prodotto esterno o vettoriale, definito solo per vettori tridi-mensionali. Le proprieta del prodotto esterno sono riassunte in [1, pag. 64]
Sappiamo che quando un corpo si muove di moto rotatorio rispetto ad un punto fisso O,acquista un momento (della quantita di moto) angolare totale rispetto a tale punto;tale momento e un vettore, che chiameremo h , che viene formalmente definito dallarelazione
h =∑
i
hi =∑
i
mi(r i × v i)
Sostituendo questa espressione in (1.1), si ha
h =∑
i
mi(r i × (ω × r i)) (1.2)
Ricordando la proprieta del prodotto triplo [1, pag. 161]
a × (b × c) = (aTc)b − (aTb)c,
dove aTc e aTb sono prodotti scalari, segue che il momento angolare si scrive come
h =∑
i
mi
((rT
i r i)ω − (rTi ω)r i
)

Basilio Bona - Calcolo del momento d’inerzia 4
Se indichiamo con r2i la norma ‖r i‖2 = (rT
i r i) = (x2i + y2
i + z2i ) ed rappresentiamo h
secondo le sue tre componenti cartesiane, otteniamo
h =∑
i
mi
r2i ωx
r2i ωy
r2i ωz
− (xiωx + yiωy + ziωz)
xi
yi
zi
ovvero
h =
hx
hy
hz
=
∑
i
mi(r2i − x2
i )ωx −mixiyiωy −mixiziωz
−mixiyiωx + mi(r2i − y2
i )ωy −miyiziωz
−mixiziωx −miyiziωy + mi(r2i − z2
i )ωz
(1.3)
Questa relazione puo venire riscritta nella forma matriciale seguente
h =∑
i
Γxx,i Γxy,i Γxz,i
Γyx,i Γyy,i Γyz,i
Γzx,i Γzy,i Γzz,i
ωx
ωy
ωz
(1.4)
dove
Γxx,i = mi(r2i − x2
i ) = mi(y2i + z2
i )
Γyy,i = mi(r2i − y2
i ) = mi(x2i + z2
i )
Γzz,i = mi(r2i − z2
i ) = mi(x2i + y2
i )
Γxy,i = Γyx,i = −mixiyi
Γxz,i = Γzx,i = −mixizi
Γyz,i = Γzy,i = −miyizi
Se nella (1.4) raccogliamo il simbolo di sommatoria, avremo
h =
Γxx Γxy Γxz
Γyx Γyy Γyz
Γzx Γzy Γzz
ωx
ωy
ωz
= Γω (1.5)
dove la matrice Γ e chiamata matrice o tensore d’inerzia ed ha come componenti imomenti d’inerzia
Γxx =∑
i
mi(r2i − x2
i ) =∑
i
mi(y2i + z2
i )
Γyy =∑
i
mi(r2i − y2
i ) =∑
i
mi(x2i + z2
i ) (1.6)
Γzz =∑
i
mi(r2i − z2
i ) =∑
i
mi(x2i + y2
i )

Basilio Bona - Calcolo del momento d’inerzia 5
e i prodotti d’inerzia
Γxy = Γyx = −∑
i
mixiyi
Γxz = Γzx = −∑
i
mixizi (1.7)
Γyz = Γzy = −∑
i
miyizi
La relazione (1.5) e qualitativamente simile all’espressione del momento lineare totalemv di un solido, che sappiamo essere il prodotto della sua massa totale m per la suavelocita lineare v . La matrice Γ rappresenta quindi le proprieta inerziali complessiverispetto alla rotazione, cosı come la massa di un corpo rappresenta le proprieta inerzialirispetto alla traslazione.
Momenti d’inerzia
Come si puo osservare, i momenti d’inerzia sono ottenuti sommando i contributidel prodotto di ogni massa per la distanza euclidea rispettivamente dagli assi x, ye z.
Prodotti d’inerzia
Se i prodotti d’inerzia sono tutti nulli, la matrice d’inerzia risulta diagonale
Γ =
Γxx 0 00 Γyy 00 0 Γzz
e gli assi del sistema di riferimento sono allineati con quelli che vengono chia-mati assi principali d’inerzia del corpo e la matrice si dice matrice principaled’inerzia.
1.2.2 Sistema di masse distribuite
Si suppone ora che il corpo di cui si vuole calcolare il momento angolare sia costituitoda una distribuzione continua di masse infinitesime dm aventi densita puntuale ρ(r) =ρ(x, y, z) funzione della posizione r , con dm = ρ(x, y, z)dV , dove dV e il volumeinfinitesimo.
La coordinata r assume i suoi valori in V , dove V e una regione finita dello spazio, aventevolume complessivo V =
∫V dV e massa totale mtot =
∫V dm =
∫V ρ(x, y, z)dV .

Basilio Bona - Calcolo del momento d’inerzia 6
I ragionamenti fatti in precedenza, relativamente al caso di n masse concentrate, si pos-sono applicare anche ora, sostituendo al simbolo di sommatoria il simbolo di integraledefinito nel volume V , per cui risulta:
h = Γω, con Γ =∫
Vρ(x, y, z)
y2 + z2 −xy −xz−xy x2 + z2 −yz−xz −yz x2 + y2
dV (1.8)
ottenendo i momenti d’inerzia, analoghi a (1.6)
Γxx =∫
Vρ(r)(y2 + z2) dV
Γyy =∫
Vρ(r)(x2 + z2) dV (1.9)
Γzz =∫
Vρ(r)(x2 + y2) dV
e i prodotti d’inerzia, analoghi a (1.7)
Γxy = Γyx = −∫
Vρ(r)xy dV
Γxz = Γzx = −∫
Vρ(r)xz dV (1.10)
Γyz = Γzy = −∫
Vρ(r)yz dV
1.2.3 Osservazioni
Va fatto osservare che la matrice d’inerzia viene definita implicitamente quando si defi-nisce il momento angolare h ; quest’ultimo a sua volta fa riferimento ad una rotazionerispetto a un punto fisso O.
Nello svolgimento dei calcoli si osserva che le componenti cartesiane del momento hsono date in funzione del riferimento scelto, che si assume avere l’origine coincidente nelpunto fisso di cui sopra; il tensore d’inerzia descrive il modo in cui la massa e distribuitarispetto agli assi del riferimento R0(O;x, y, z).
Ecco perche spesso si dice, alternativamente, momento d’inerzia rispetto ad un punto ematrice o momenti d’inerzia rispetto agli assi. Cio non deve ingenerare confusione; sitratta solo di un uso un po’ disinvolto dei termini matematici, che una volta capiti, nondebbono presentare un problema.
Se il riferimento e solidale al corpo, il tensore d’inerzia rimane invariante nel tempo. Sesi sceglie un diverso riferimento solidale al corpo, pur con l’origine nello stesso punto

Basilio Bona - Calcolo del momento d’inerzia 7
O, cambiano le componenti di h , e conseguentemente anche le componenti di Γ , checomunque restano tempo-invarianti.
Se si trasla in un altro punto l’origine del sistema di riferimento, che pero resta solidaleal corpo, la matrice Γ cambia, obbedendo al teorema degli assi paralleli (vedi oltre).
Se invece il corpo ruota rispetto al riferimento, le componenti di Γ variano nel tempo,introducendo una maggior complicazione, che non verra trattata qui, ma che apparequando, per ricavare le equazioni (dinamiche) di Eulero, si deriva nel tempo il momentodella quantita di moto angolare.
Trasformazioni tra matrici d’inerziaEsplicitiamo quanto detto sopra nei due casi piu comuni di trasformazione tra sistemi diriferimento.
• DettiR1b/O(O, i1, j 1, k1) eR2
b/O(O, i2, j 2, k2) due generici sistemi di riferimen-to, entrambi solidali al corpo b, con origine O comune, legati tra loro da una tra-sformazione di rotazione pura, data dalla matrice (di rotazione) R1
2 e dette Γ 1b/O
e Γ 2b/O le relative matrici d’inerzia, si avranno tra queste le seguenti relazioni:
Γ 1b/O = R1
2Γ2b/O(R1
2)T = R1
2Γ2b/OR2
1 (1.11)
Γ 2b/O = R2
1Γ1b/O(R2
1)T = R2
1Γ1b/OR1
2 (1.12)
• (Teorema degli assi paralleli) – Detti Rb/A(A, i , j , k) e Rb/O(B, i , j , k) duegenerici sistemi di riferimento, entrambi solidali al corpo b e paralleli tra loro, condiverse origini A e B, legati dalla traslazione relativa
−→AB= tAB =
txtytz
=
xB − xA
yB − yA
zB − zA
e dette Γ b/A e Γ b/B le relative matrici d’inerzia, si avra tra queste la seguenterelazione:
Γ b/A = Γ b/B + mtot
{‖tAB‖2 I − tABtT
AB
}(1.13)
Piu semplicemente avremo una nuova matrice d’inerzia
Γ ′ ≡ Γ b/A =
Γ ′xx Γ ′xy Γ ′xz
Γ ′yx Γ ′yy Γ ′yz
Γ ′zx Γ ′zy Γ ′zz

Basilio Bona - Calcolo del momento d’inerzia 8
con
Γ ′xx = Γxx + mtot(t2y + t2z)
Γ ′yy = Γyy + mtot(t2x + t2z)
Γ ′zz = Γzz + mtot(t2x + t2y)
Γ ′xy = Γxy + mtottxty
Γ ′xz = Γzx + mtottxtz
Γ ′yz = Γzy + mtottytz
Le trasformazioni valgono in generale, sia per sistemi di masse puntiformi, dove mtot =∑i mi sia per corpi di massa distribuita, dove mtot =
∫V dm =
∫V ρdV .
Concludiamo le osservazioni ricordando che viene chiamato centro di massa o bari-centro del corpo (sia esso formato da masse puntiformi sia da masse distribuite) quelparticolare punto geometrico C di coordinate r c per il quale vale la relazione
r cmtot =∫
Vrρ(r)dV
ossia quello in cui, ai fini inerziali, si puo pensare di concentrare la massa totale delcorpo.
Infine ricordiamo che e spesso utile e conveniente calcolare il momento o la matri-ce d’inerzia rispetto agli assi di un riferimento RC(C; x∗, y∗, z∗) allineato lungo gliassi principali d’inerzia e con l’origine nel centro di massa del corpo.
1.3 Calcolo del momento d’inerzia del braccio
Facendo riferimento al braccio considerato come un prisma e ai parametri dimensionaliindicati precedentemente, possiamo fissare i seguenti insiemi di integrazione per le trevariabili spaziali
X : −a ≤ x ≤ a
Y : −b ≤ y ≤ b
Z : −c ≤ z ≤ c
V : X × Y × Z
Possiamo scrivere l’integrale di volume (1.8) come integrale triplo
Γ =∫∫∫
X,Y,Zρ(x, y, z)
y2 + z2 −xy −xz−xy x2 + z2 −yz−xz −yz x2 + y2
dx dy dz (1.14)

Basilio Bona - Calcolo del momento d’inerzia 9
dove l’ordine di integrazione e ininfluente, essendo l’integrazione un operatore lineare.
Per semplicita e brevita sviluppiamo completamente solo il primo elemento della matriceΓ , ossia
Γ11 ≡ Γxx =∫∫∫
X,Y,Zρ(x, y, z)(y2 + z2)dx dy dz (1.15)
Possiamo inizialmente scegliere il seguente ordine di integrazione
Γxx =∫
Z
[∫
Y
[∫
Xρ(x, y, z)(y2 + z2)dx
]dy
]dz
=∫ +c
−cdz
∫ +b
−bdy
∫ +a
−aρ(x, y, z)(y2 + z2)dx
Sviluppiamo ora il primo integrale∫ +a
−aρ(x, y, z)(y2 + z2)dx =
∫ +a
−a
M
8abc(y2 + z2)dx
che risulta essere semplicemente∫ +a
−a
M
8abc(y2 + z2)dx =
M
8abc
(∫ +a
−ay2dx +
∫ +a
−az2dx
)
=M
8abc
(xy2
∣∣+a
−a+ xz2
∣∣+a
−a
)
=M
8abc
(ay2 − (−a)y2 + az2 − (−a)z2
)
=M
8abc2a(y2 + z2)
=M
4bc(y2 + z2)
Ora abbiamo da integrare
Γxx =∫ +c
−cdz
∫ +b
−b
M
4bc(y2 + z2)dy
il cui termine in dy risulta essere:∫ +b
−b
M
4bc(y2 + z2)dy =
M
4bc
∫ +b
−by2dy +
M
4bc
∫ +b
−bz2dy
=M
4bc
(13
y3∣∣+b
−b+ z2y
∣∣+b
−b
)
=M
4bc
(2b3
3+ 2bz2
)
=M
2c
(13b2 + z2
)

Basilio Bona - Calcolo del momento d’inerzia 10
Ora non ci resta che integrare il termine restante, nel modo seguente:
Γxx =∫ +c
−c
M
2c
(13b2 + z2
)dz
=M
2c
(∫ +c
−c
13b2dz +
∫ +c
−cz2dz
)
=M
2c
(13b2 z|+c
−c +13
z3∣∣+c
−c
)
=M
2c
(23b2c +
23c3
)
=M
3(b2 + c2
)
Lasciamo al lettore di verificare che si otterrebbe lo stesso risultato integrando in unordine diverso, ad esempio
∫ +b
−bdy
∫ +a
−adx
∫ +c
−cρ(x, y, z)(y2 + z2)dz
Possiamo riassumere ora tutti i termini della matrice d’inerzia ΓPr del prisma:
ΓPr =M
3
(b2 + c2) 0 00 (a2 + c2) 00 0 (a2 + b2)
(1.16)
1.4 Calcolo del momento d’inerzia dei due cilindri
Si tratta ora di calcolare il momento d’inerzia dei due cilindri con assi paralleli all’assez e posti ad una distanza da esso di a1 e a2 rispettivamente. Per fare questo, primacalcoliamo il momento d’inerzia di un cilindro generico intorno al suo asse di rotazionee poi, applicando il teorema degli assi paralleli, calcoliamo il momento d’inerzia rispettoall’asse z.
Senza addentrarci in calcoli del tutto analoghi a quelli visti nella Sezione precedente,possiamo affermare che il momento d’inerzia di un generico cilindro di raggio r, altezzah e densita ρ =
m
πr2hrispetto all’asse di simmetria verticale, vale:
Γ ′zz =12mr2
Per completezza, il momento d’inerzia rispetto agli altri due assi ortogonali vale
Γ ′xx = Γ ′yy =12mh2 +
12mr2

Basilio Bona - Calcolo del momento d’inerzia 11
Ora applichiamo il teorema degli assi “paralleli”, che ci permette di calcolare il momentod’inerzia rispetto ad un asse parallelo al precedente, ma spostato di una distanza pari ada; risulta quindi che il momento d’inerzia rispetto all’asse z passante per il centro dimassa del prisma vale
Γzz = Γ ′zz + ma2
e, in particolare, essendo i due cilindri posti a distanze diverse, avremo
Γzz,1 =12m1r
21 + m1a
21,
Γzz,2 =12m2r
22 + m2a
22.
A conclusione di questi calcoli, risulta che il momento d’inerzia dell’intero corpo rigi-do rispetto all’asse di rotazione z risulta essere la somma (ricordiamo che l’operatoreintegrale e additivo):
Γ totzz =
M
3(b2 + c2) +
12m1r
21 + m1a
21 +
12m2r
22 + m2a
22.
Bibliografia
[1] B. Bona, Modellistica dei Robot Industriali, CELID, Torino, 2002.
12

Basilio Bona - Calcolo del momento d’inerzia 13
Figure
Figura 1.1: Robot planare.

Basilio Bona - Calcolo del momento d’inerzia 14
Figura 1.2: Braccio prismatico.
Figura 1.3: Un sistema di n masse mi puntiformi.
Basilio Bona - Calcolo del momento d’inerzia 15
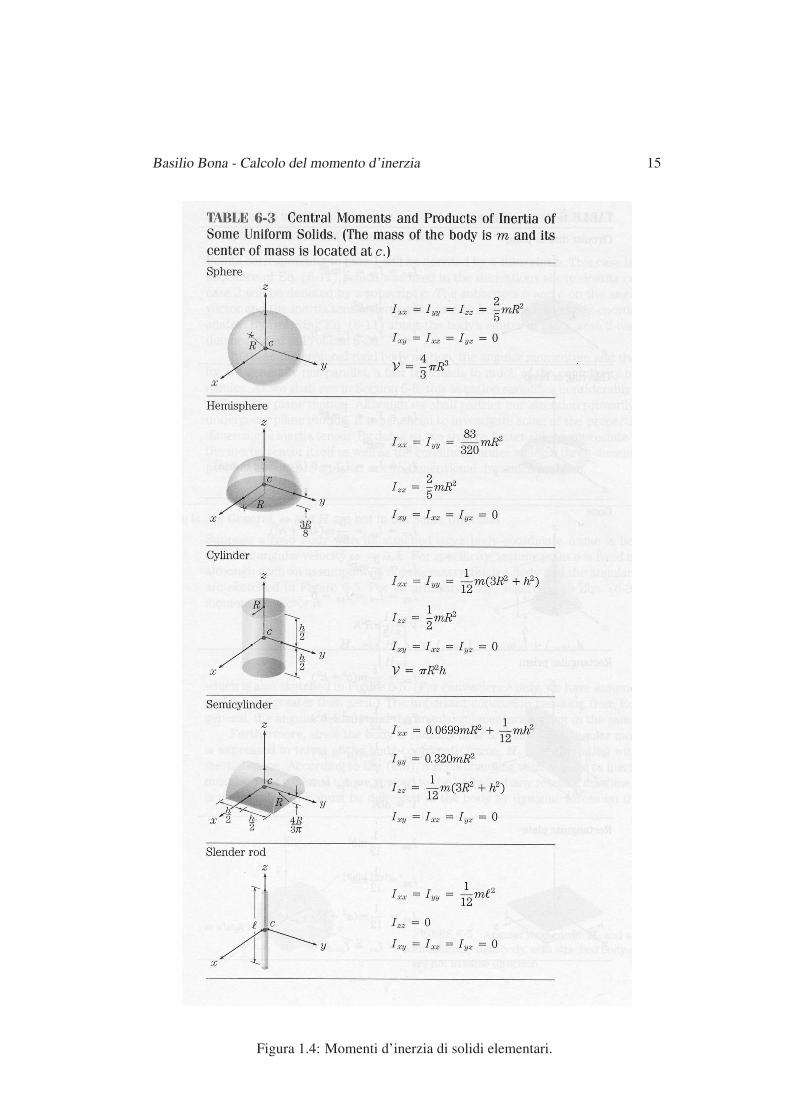
Figura 1.4: Momenti d’inerzia di solidi elementari.
Basilio Bona - Calcolo del momento d’inerzia 16
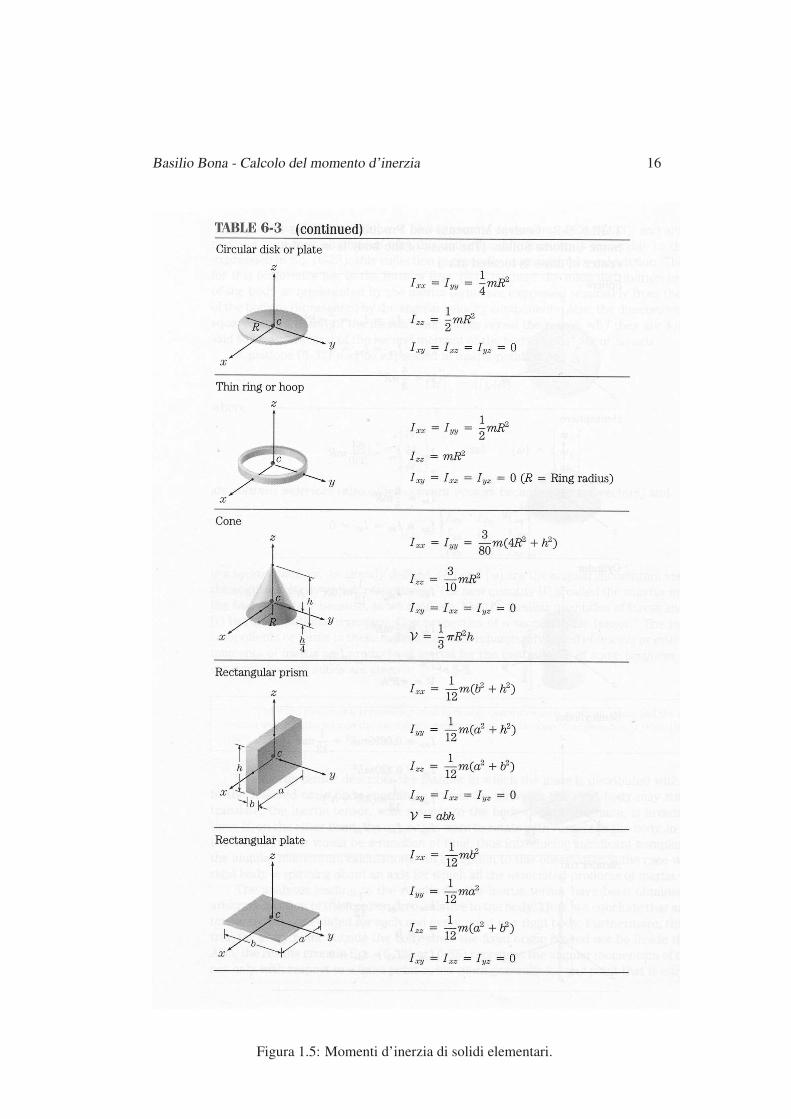
Figura 1.5: Momenti d’inerzia di solidi elementari.
Elenco delle figure
1.1 Robot planare. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2 Braccio prismatico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3 Un sistema di n masse mi puntiformi. . . . . . . . . . . . . . . . . . . 14
1.4 Momenti d’inerzia di solidi elementari. . . . . . . . . . . . . . . . . . 15
1.5 Momenti d’inerzia di solidi elementari. . . . . . . . . . . . . . . . . . 16
17

Indice
1 21.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Momento angolare e momenti d’inerzia . . . . . . . . . . . . . . . . . 3
1.2.1 Sistema di masse puntiformi . . . . . . . . . . . . . . . . . . . 3
1.2.2 Sistema di masse distribuite . . . . . . . . . . . . . . . . . . . 5
1.2.3 Osservazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Calcolo del momento d’inerzia del braccio . . . . . . . . . . . . . . . . 8
1.4 Calcolo del momento d’inerzia dei due cilindri . . . . . . . . . . . . . 10
18