03.ab I sistemi linearipeople.na.infn.it/~scotti/Area studenti/3. Istituzioni di Fisica... ·...
24
I sistemi lineari ( 29 ( 29 x t b x t a x + = & & &
Transcript of 03.ab I sistemi linearipeople.na.infn.it/~scotti/Area studenti/3. Istituzioni di Fisica... ·...

I sistemi lineari
( ) ( ) xtbxtax += &&&
3.a I sistemi lineari
Ryōgo KuboGiappone, 1920 – 1995
Laplace fu uno degli scienziati più influenti del tempo. I suoi contributi allo studio della Meccanica celeste furono decisivi. Si occupò di molti problemi mmatematici, tra cui lo studio delle equazioni differenziali.
Kubo è stato un fisico matematico che ha concentrato lo studio sulla Meccanica Statistica del nnon-equilibrio, sviluppando in particolare la Teoria Quantistica della risposta lineare.
Pierre-Simon LaplaceFrancia 1749 – 1827

3.a I sistemi lineari
Un sistema dinamico lineare è un sistema dinamico la cui evoluzione è governata dal principio di sovrapposizione degli effetti:
Se la sollecitazione esterna F raddoppia, raddoppia anche la risposta x.
La Fisica Classica e la Meccanica Quantistica offrono esempi di sistemi dinamici lineari in tutti gli ambiti tematici della Meccanica, dell’Elettromagnetismo, ecc.
I sistemi dinamici lineari
Le più comuni equazioni differenziali che descrivono questa classe di sistemi fisici sono del tipo:
( )tFxbxax ++= &&&
II ordine : compare al più la derivata seconda
a e b potrebbero dipendere da t, ma ci soffermiamo sulle equazioni a coefficienti costanti
L’insieme delle soluzioni x = x(t) dell’equazione si chiama Integrale Generale I.G.2
2
td
xdx;
td
xdx == &&&
3.a I sistemi lineari
I sistemi dinamici lineari
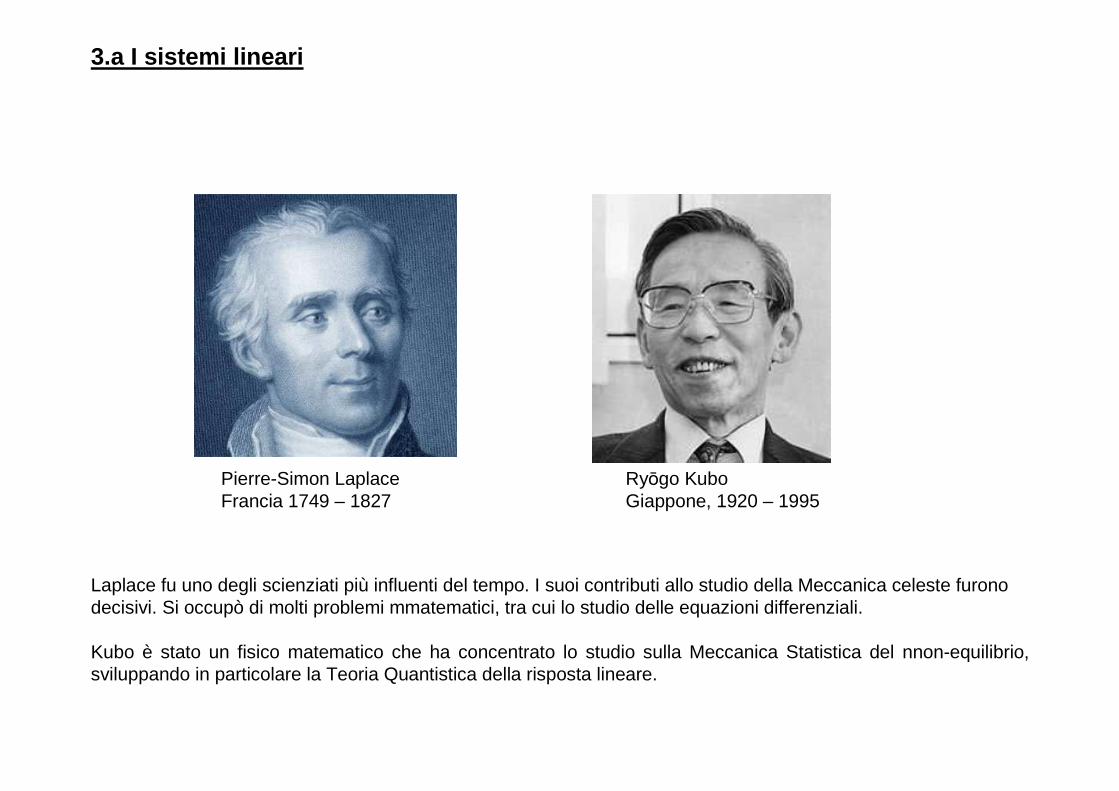
Esempio di sistema dinamico lineare: l’oscillatore armonico
a. Oscillatore forzato b. Oscillatore forzato - smorzato
( )tωcosFF o=( )tωcosFF
xm
F
o
v
=τ
−= &
a. Sull’oscillatore agisce la forza esterna oscillante:
b. Sull’oscillatore agisce anche una forza dovuta alla resistenza del mezzo (per esempio, l’aria:
( )tFxmxm 2o +ω−=&&
( )tFxmxm
xm 2o +ω−
τ−= &&&

3.a I sistemi lineari
a. Oscillatore forzato.La risposta x(t) è in fase con la sollecitazione F(t).
I sistemi dinamici lineari
L’ampiezza della risposta è proporzionale all’ampiezza della sollecitazione.
Il segnale di risposta x(t) può avere un ritardo di fase rispetto alla sollecitazione F(t).
b. Oscillatore forzato - smorzato.La risposta x(t) porta un ritardo di fase rispetto alla sollecitazione F(t).
fenomenologia
3.a I sistemi lineari
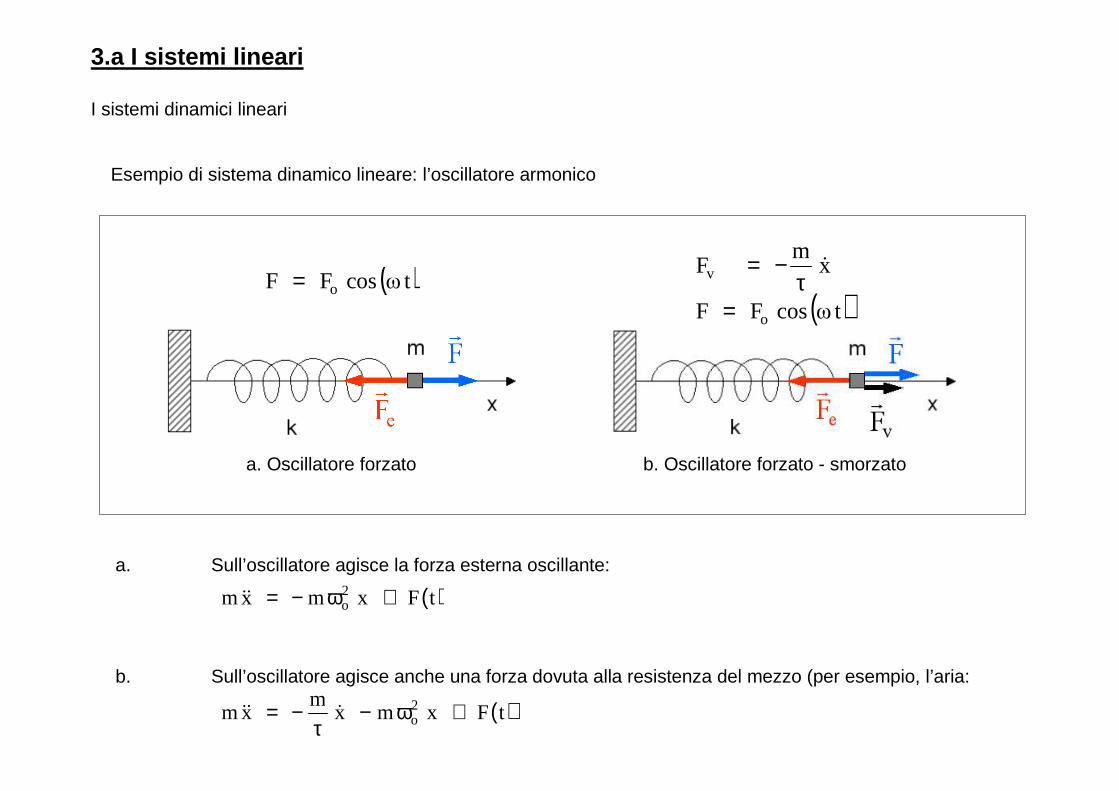
In assenza di sollecitazione esterna, i sistemi lineari sono descritti da equazioni differenziali lineari omogenee .
Le più comuni equazioni differenziali che descrivono questa classe di sistemi fisici sono del tipo:
Esempio di sistema dinamico lineare libero: l’oscillatore armonico
a. Oscillatore libero b. Oscillatore smorzato
a. Sull’oscillatore libero agisce solo la forza elastica:
b. Sull’oscillatore smorzato agisce anche la forza dovuta alla resistenza del mezzo:
xmxm 2oω−=&&
xmxm
xm 2oω−
τ−= &&&
xbxax += &&&
3.a I sistemi lineari
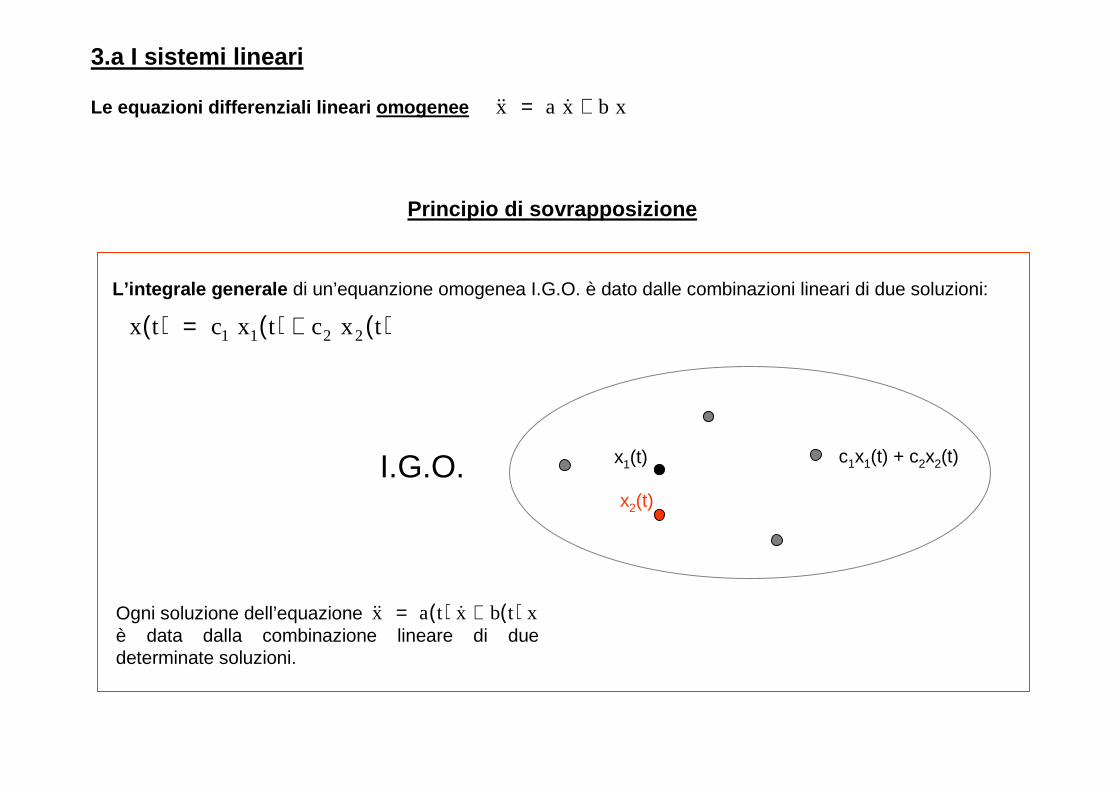
L’integrale generale di un’equanzione omogenea I.G.O. è dato dalle combinazioni lineari di due soluzioni:
( ) ( ) ( )txctxctx 2211 +=
Principio di sovrapposizione
I.G.O. x1(t)
x2(t)
c1x1(t) + c2x2(t)
Ogni soluzione dell’equazioneè data dalla combinazione lineare di due determinate soluzioni.
( ) ( ) xtbxtax += &&&
Le equazioni differenziali lineari omogenee xbxax += &&&

Le equazioni differenziali lineari omogenee
3.a I sistemi lineari
In base al Principio di sovrapposizione, l’I.G. di un’equazione omogenea è uno spazio vettoriale.
I vettori sono le soluzioni dell’equazione .
Le proprietà formali di uno spazio vettoriale
La combinazione lineare di due vettori è un vettoreLe operazioni di somma tra vettori e di moltiplicazione per un numero (scalare) soddisfano le seguenti proprietà:
xbxax += &&&
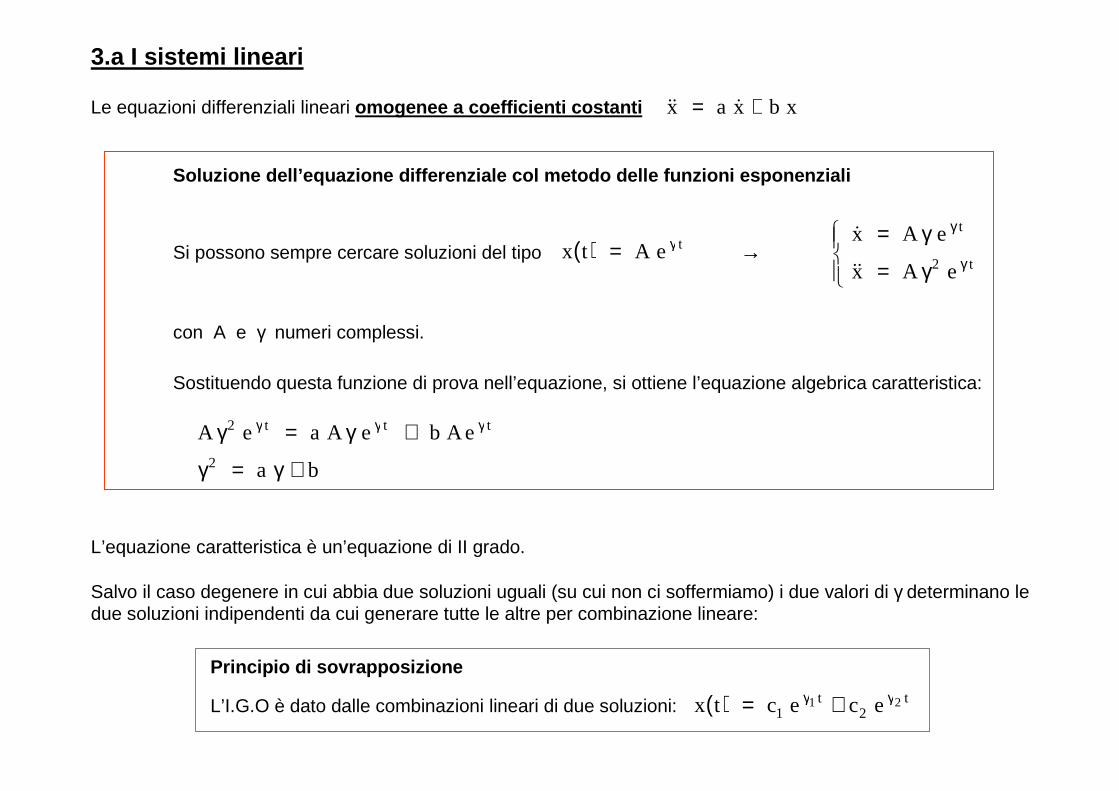
Le equazioni differenziali lineari omogenee a coefficienti costanti
3.a I sistemi lineari
xbxax += &&&
L’equazione caratteristica è un’equazione di II grado.
Salvo il caso degenere in cui abbia due soluzioni uguali (su cui non ci soffermiamo) i due valori di γ determinano le due soluzioni indipendenti da cui generare tutte le altre per combinazione lineare:
Si possono sempre cercare soluzioni del tipo ( ) teAtx γ=
Sostituendo questa funzione di prova nell’equazione, si ottiene l’equazione algebrica caratteristica:
γ=
γ=→
γ
γ
t2
t
eAx
eAx
&&
&
ba
eAbeAaeA2
ttt2
+γ=γ
+γ=γ γγγ
con A e γ numeri complessi.
Soluzione dell’equazione differenziale col metodo d elle funzioni esponenziali
L’I.G.O è dato dalle combinazioni lineari di due soluzioni: ( ) t2
t1
21 ecectx γγ +=
Principio di sovrapposizione
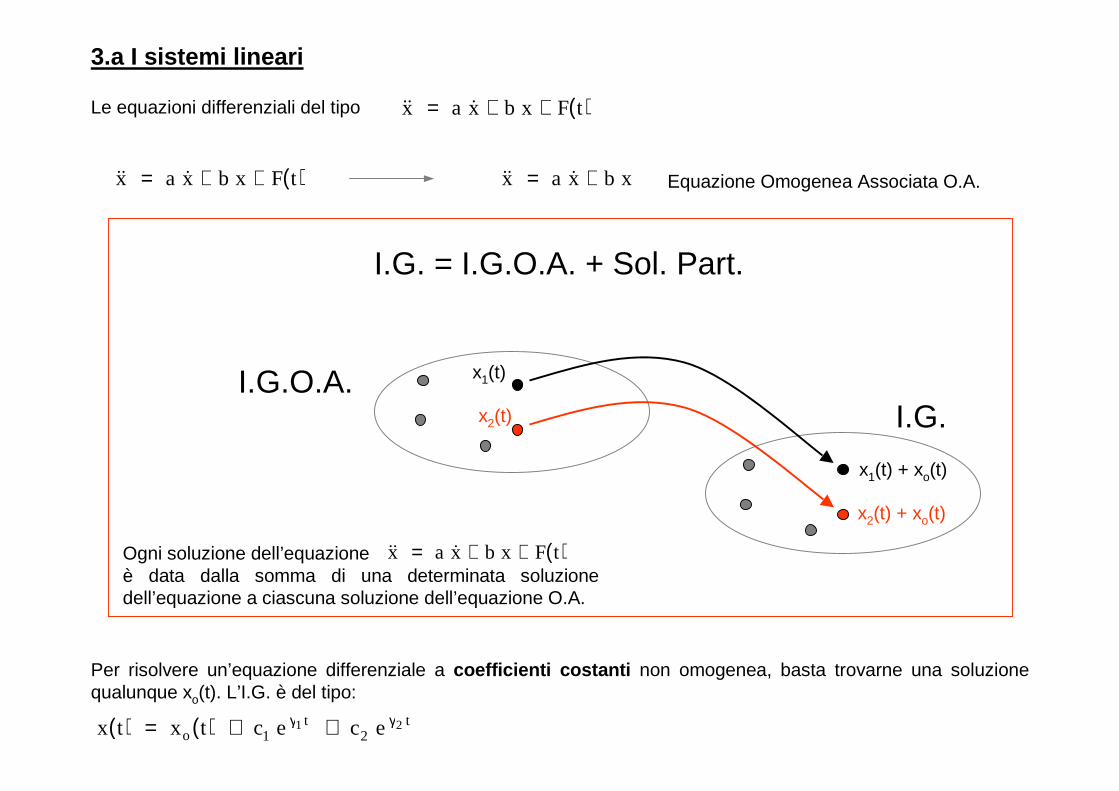
Le equazioni differenziali del tipo
3.a I sistemi lineari
( )tFxbxax ++= &&&
Equazione Omogenea Associata O.A.xbxax += &&&( )tFxbxax ++= &&&
I.G. = I.G.O.A. + Sol. Part.
Ogni soluzione dell’equazioneè data dalla somma di una determinata soluzione dell’equazione a ciascuna soluzione dell’equazione O.A.
( )tFxbxax ++= &&&
I.G.O.A. I.G.
x1(t)
x2(t)
x1(t) + xo(t)
x2(t) + xo(t)
Per risolvere un’equazione differenziale a coefficienti costanti non omogenea, basta trovarne una soluzione qualunque xo(t). L’I.G. è del tipo:
( ) ( ) t2
t1o
21 ecectxtx γγ ++=
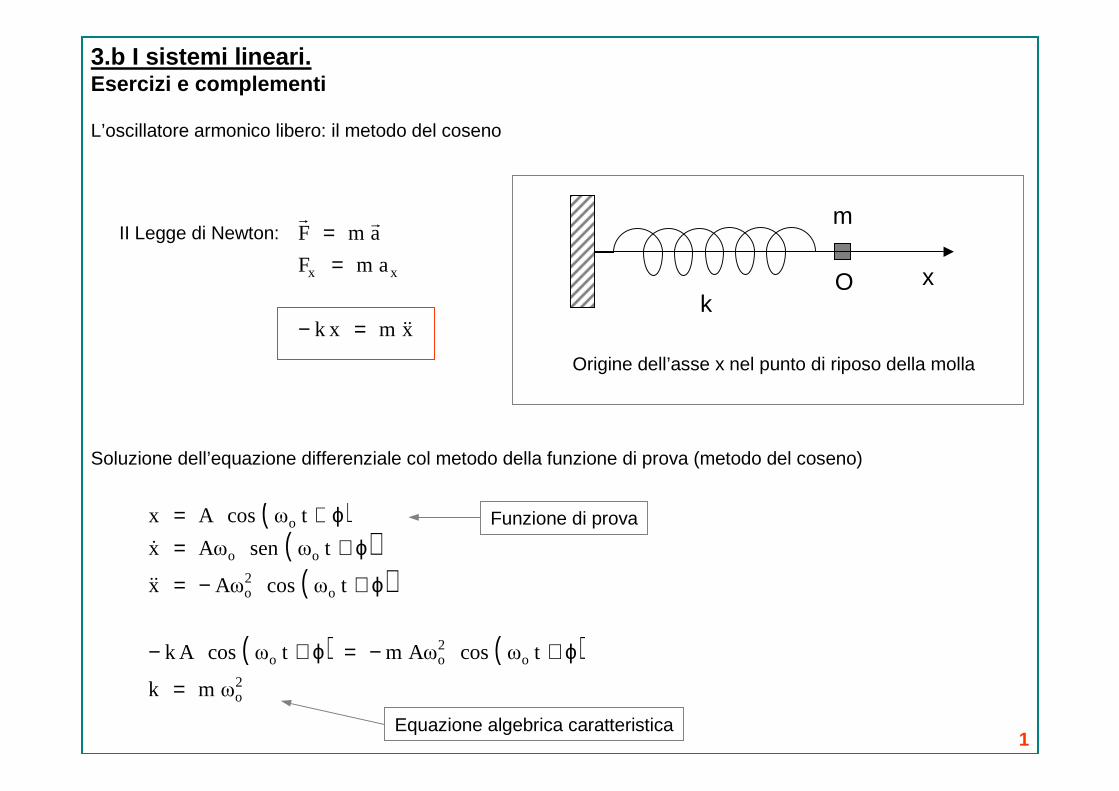
L’oscillatore armonico libero: il metodo del coseno
xmxk
amF
amF
xx
&&
rr
=−
==
( )( )
( )ϕ+−=
ϕ+=ϕ+=
tωcosAωx
tωsenAωx
tωcosAx
o2o
oo
o
&&
&
Funzione di prova
( ) ( )2o
o2oo
ωmk
tωcosAωmtωcosAk
=
ϕ+−=ϕ+−
Equazione algebrica caratteristica
Soluzione dell’equazione differenziale col metodo della funzione di prova (metodo del coseno)
m
kxO
Origine dell’asse x nel punto di riposo della molla
II Legge di Newton:
1
3.b I sistemi lineari.Esercizi e complementi

( )( ) ( ) ( ) ( ) ( )
( )[ ] ( ) ( )[ ] ( )( ) ( )tωsenbtωcosax
tωsensenAtωcoscosAx
tωsensentωcoscostωcos
tωcosAx
oo
oo
ooo
o
+=ϕ−+ϕ=
ϕ−ϕ=ϕ+ϕ+=
Due modi di rappresentare la legge oraria dell’oscillatore armonico
2
L’oscillatore armonico libero: il metodo del coseno
3.b I sistemi lineari.Esercizi e complementi
( )ϕ+= tωcosAx o ( ) ( )tωsenbtωcosax oo +=

( ) ( )( )ϕ+=
+=
+=
+=
ϕ+−ϕ+
−
tωcosA2
eAeAx
2
eAeAx
2
C.C.eAx
o
tωitωi
tωitωi
tωi
oo
oo
o
****
La legge oraria dell’oscillatore armonico nel formalismo dei numeri complessi
C.C. = complesso coniugato
ϕ= ieAA
( ) ( )( )ϕ+ω=
+ ϕ+ω−ϕ+ω
tcos2
ee titi
2
3.b I sistemi lineari.Esercizi e complementi
2
C.C.eAx
tωi o += ( )ϕ+= tωcosAx o
Significato fisico del numero complesso AIl modulo di A rappresenta l’ampiezza dell’oscillazioneL’argomento di A rappresenta la fase iniziale
2
eAeAx
i
ω
eAmeAωm
eAx;eAx;eAx
td
xdmxm
amF
titi
o
22o
t2t2o
t2tt
2
22o
xx
oo ω−ω
γγ
γγγ
+=
ω±=γγ=
γ=−
γ=γ==
=ω−
=
****
&&&
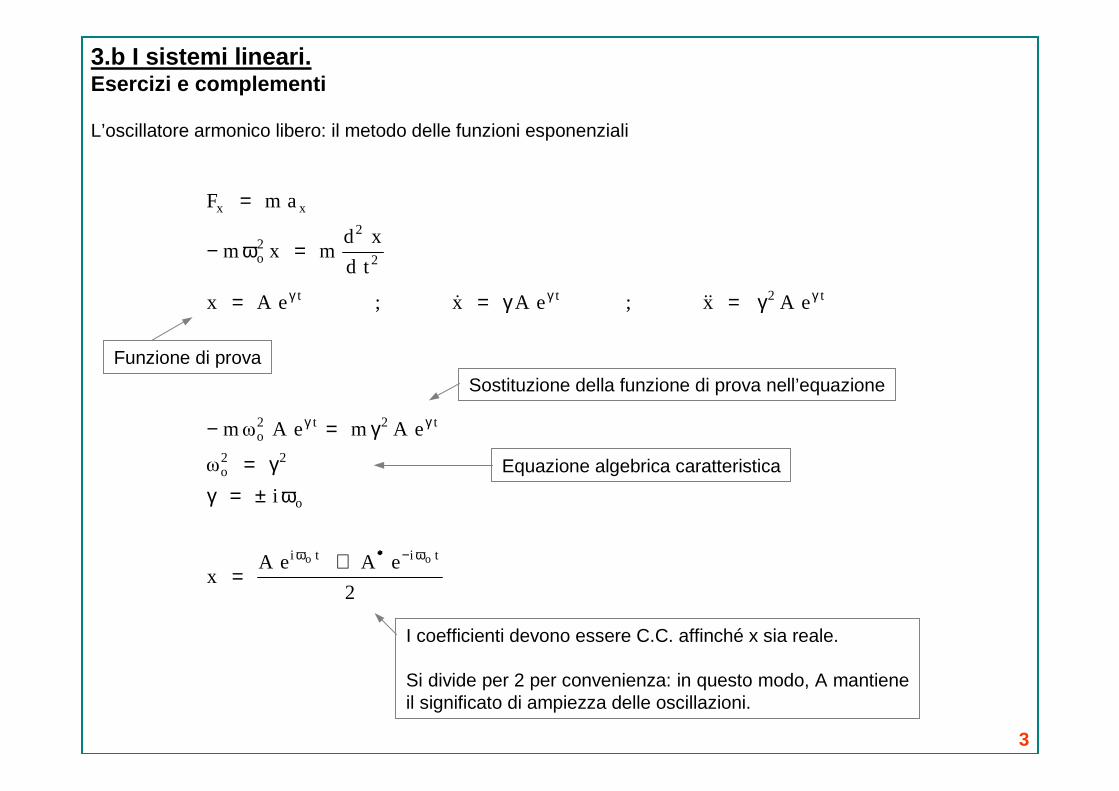
I coefficienti devono essere C.C. affinché x sia reale.
Si divide per 2 per convenienza: in questo modo, A mantiene il significato di ampiezza delle oscillazioni.
3
3.b I sistemi lineari.Esercizi e complementi
L’oscillatore armonico libero: il metodo delle funzioni esponenziali
Funzione di prova
Equazione algebrica caratteristica
Sostituzione della funzione di prova nell’equazione

( )tititi
2
22o
ooo
eA2
eAeAx
td
xdmxm
ωω−ω
=+
=
=ω−
ReReReRe
****
3
3.b I sistemi lineari.Esercizi e complementi
L’oscillatore armonico libero: il metodo delle funzioni esponenziali
Scorciatoia:“dimentichiamo” di prendere la parte Reale:
2
eAeAx
titi oo ω−ω +=
****
ti oeAx ω=
Si può utilizzare la funzione complessa
in tutti i calcoli che implicano esclusivamente combinazioni lineari della funzione x(t). Nelle combinazioni lineari, infatti, le parti reali si sommano alle parti reali e le parti immaginarie alle parti immaginarie. Si prenderà poi la parte reale del risultato.
Attenzione:Quando si eseguono operazioni non-lineari (calcolo di x2(t), ecc.) la scorciatoia non funziona!
ti oeAx ω=
( )
( )
2
AmUKE
4
eAeAA2
2
mxm
2
1U
4
eAeAA2
2
mxm
2
1K
4
A2eAeA
4
eAeAx
2
eAωieAωix
4
A2eAeA
4
eAeAx
2
eAeAx
22o
ti22ti2222o22
o
ti22ti2222o2
22o
ti222o
ti222o
2titi2o2
tωi*o
tωio
2ti22ti222titi2
titi
oo
oo
oooo
oo
oooo
oo
ω=+=
++ω=ω=
−−ω==
ω+ω−ω−=
−ω−=
−=
++=
+=
+=
ω−ω
ω−ω
ω−ωω−ω
−
ω−ωω−ω
ω−ω
****
****
********
********
****
&
&
&
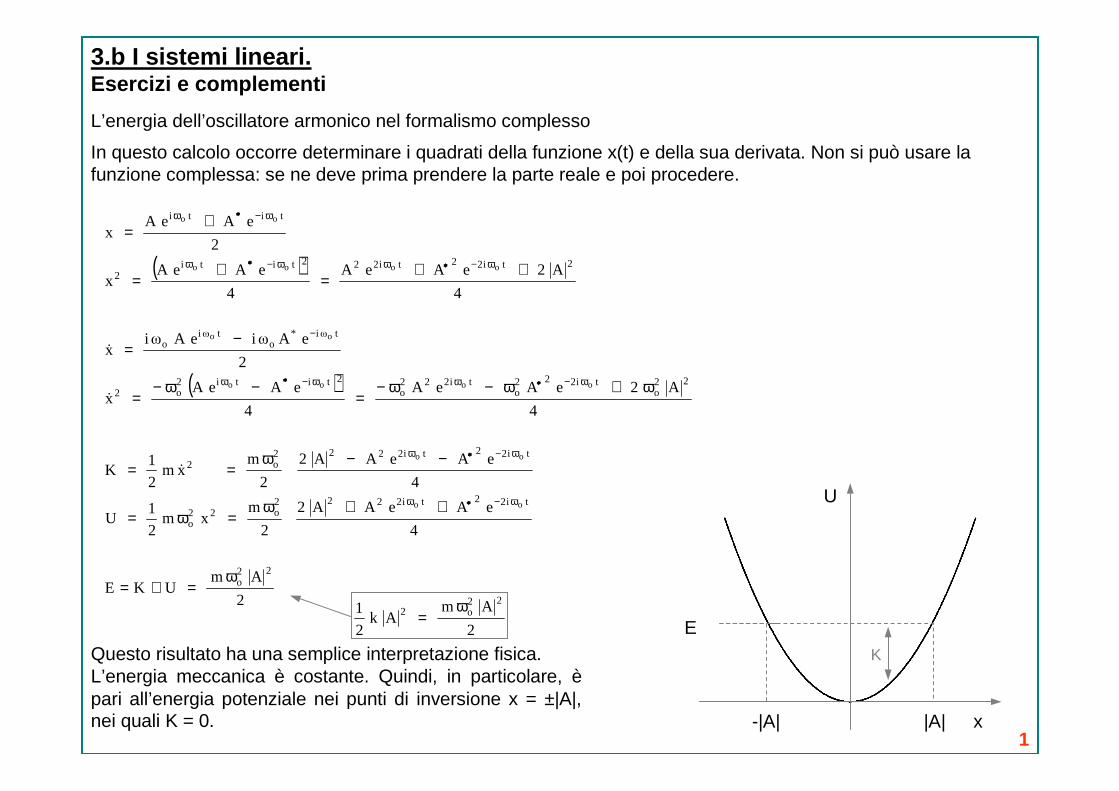
L’energia dell’oscillatore armonico nel formalismo complesso
3.b I sistemi lineari.Esercizi e complementi
In questo calcolo occorre determinare i quadrati della funzione x(t) e della sua derivata. Non si può usare la funzione complessa: se ne deve prima prendere la parte reale e poi procedere.
Questo risultato ha una semplice interpretazione fisica.L’energia meccanica è costante. Quindi, in particolare, è pari all’energia potenziale nei punti di inversione x = ±|A|, nei quali K = 0.
U
E
x-|A| |A|
K
2
AmAk
2
122
o2 ω=
1

L’energia dell’oscillatore armonico nel formalismo complesso
3.b I sistemi lineari.Esercizi e complementi
Scorciatoia: “dimentichiamo” il C.C.
2
xmE
eAx22
o
ti o
ω=
= ω
Per calcolare K e U in funzione del tempo, non si può usare la funzione complessa: se ne deve prima prendere la parte reale e poi procedere.
Ma se ci interessa solo l’energia meccanica E, possiamo ancora usare una scorciatoia:
Gli esempi riportati non hanno in comune solo l’aspetto matematico, ma presentano profonde analogie sul piano della Fisica.
L’utilità di questa scorciatoia sta in questo: si potrà usare lo stesso trucco per calcolare l’energia meccanica di un’onda elastica, l’energia di un’onda elettromagnetica, ecc. Inoltre, in MQ si usa un algoritmo simile per determinare la distribuzione di probabilità a partire dalla funzione d’onda:
( ) ( ) 2xx ψ⇔ψFunzione d’onda Distribuzione di probabilità
2

( )
( )22o
o
2o
2o
tiω2tiωo
tiω2o
ti
2
2ti
o2o2
2
o2o
xx
ωωm
FA
AωmFAωm
eAωmeFeAωm
eAx
td
xdmeFxm
td
xdmωtcosFxm
amF
−=
−=+−
−=+−
=
=+ω−⇒=+ω−
=
ω
ω
EsercizioDeterminare una soluzione particolare dell’oscillatore armonico forzato
3.b I sistemi lineari.Esercizi e complementi
Se la pulsazione della forza esterna si avvicina a ωo, l’ampiezza delle oscillazioni aumenta.Questo è il fenomeno della risonanza.
A
ωωο
Soluzione particolare: ω è la pulsazione della forza esterna, A un parametro da determinare
( )
( ) ( )
( )
=γ
=⇒
=γ
γ=
⇒+−γ
=
−γ
==
+=⇒+=
γ−γ−
γ−γ−∫
∫
CR
1R
fi
RC
1
C
if
eiRe1C
if
e1i
dtti;eii
iRdttiC
1fRi
C
Qf
oo
oo
to
too
tot
0
to
t
0oo
''''''''
''''''''
3.b I sistemi lineari.Esercizi e complementi
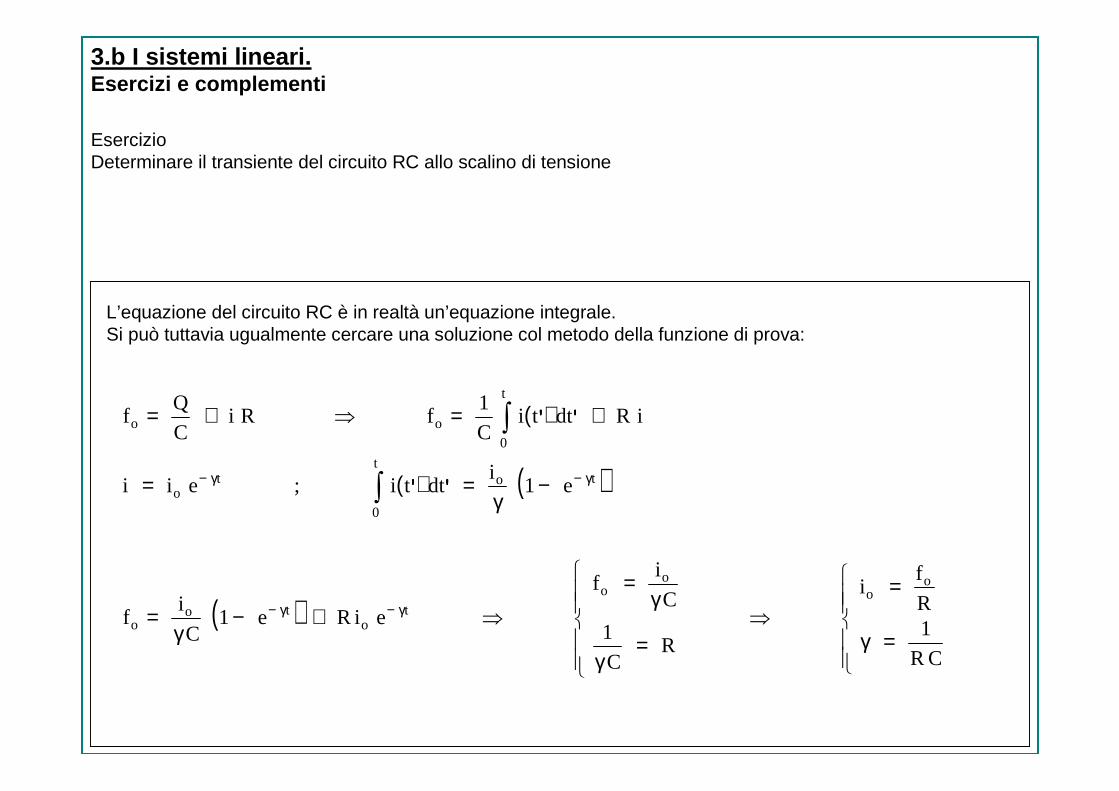
EsercizioDeterminare il transiente del circuito RC allo scalino di tensione
L’equazione del circuito RC è in realtà un’equazione integrale.Si può tuttavia ugualmente cercare una soluzione col metodo della funzione di prova:
( ) ( )
( )
( )Z;eZ
f
Z
fi
iZiRCi
1f
eiRiC
eiefi
eiitd
id;eiiPartSol
transienteeiiAOGI
td
idR
C
i0AO
td
idR
C
iefiiRdtti
C
1efRi
C
Qtωcosf
iooo
ooo
tio
tioti
o
tio
tio
t1
tio
t
0
tioo
ArgArgArgArg
........
................
........
''''''''
=θ==
=
+
ω=
ω+=ω
ω==
=
+=
+=ω⇒+=⇒+=
θ−
ωω
ω
ωω
γ−
ωω∫
3.b I sistemi lineari.Esercizi e complementi
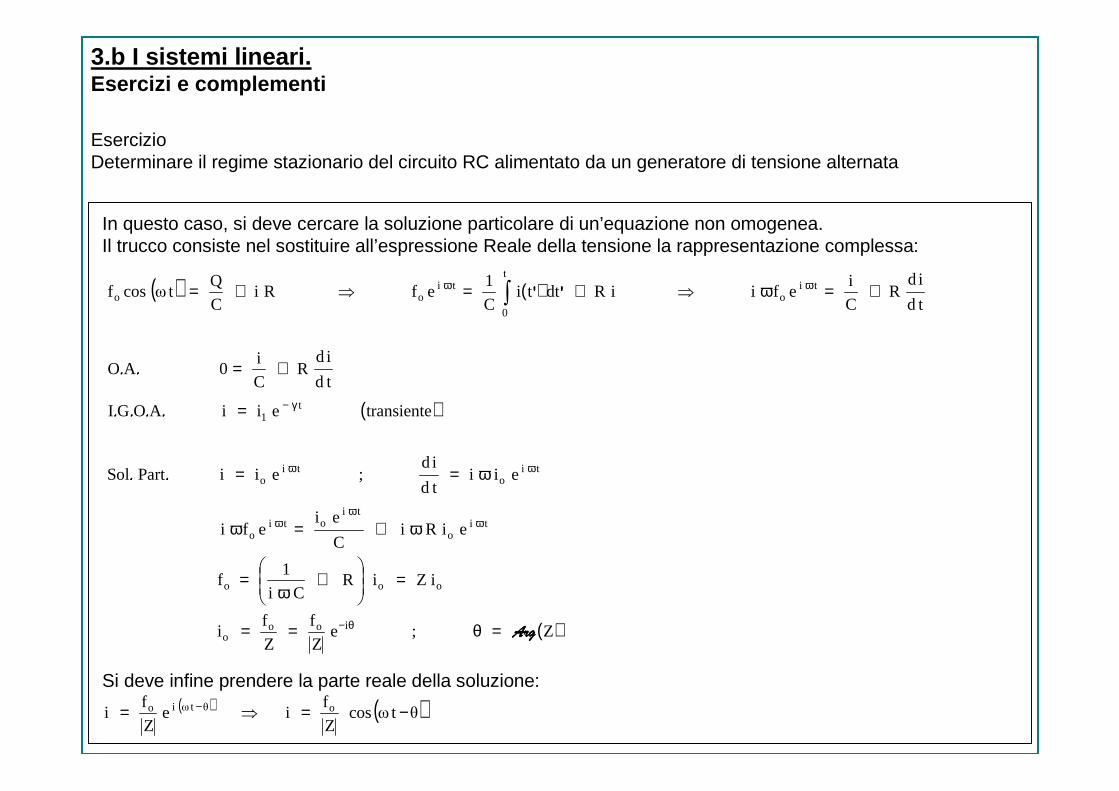
EsercizioDeterminare il regime stazionario del circuito RC alimentato da un generatore di tensione alternata
In questo caso, si deve cercare la soluzione particolare di un’equazione non omogenea.Il trucco consiste nel sostituire all’espressione Reale della tensione la rappresentazione complessa:
Si deve infine prendere la parte reale della soluzione:( ) ( )θtωcos
Z
fie
Z
fi oθtωio −=⇒= −

tNN ∆∝∆−
EsercizioIntrodurre e risolvere l’equazione differenziale che descrive il decadimento di un insieme di No nuclei radioattivi.
3.b I sistemi lineari.Esercizi e complementi
Il decadimento è un processo stocastico.In media, si può affermare che la diminuzione -∆N del numero di nuclei integri debba essere proporzionale al tempo ∆t di osservazione e al numero stesso di nuclei integri:
τ=− N
td
Nd
Per motivi dimensionali, la costante di proporzionalità è l’inverso di un tempo caratteristico τ detto tempo di vita media. Dividendo per ∆t e passando al limite, si ottiene così:
τ−
γ−γ−
γ−γ−
=
τ=γ
τ−=γ−
γ−==
t
o
tot
o
to
to
eNN
1
eNeN
eNtd
Nd;eNN
Si cerca la soluzione col metodo della funzione esponenziale di prova:
3.b I sistemi lineari.Esercizi e complementi
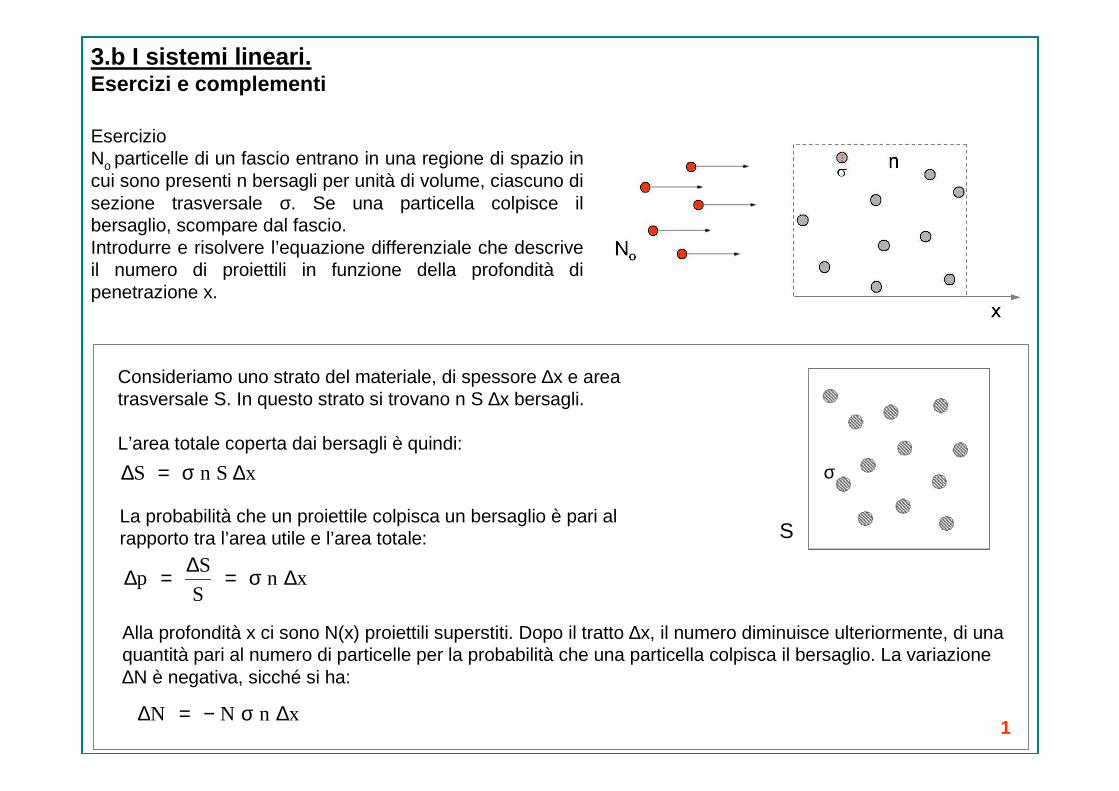
EsercizioNo particelle di un fascio entrano in una regione di spazio in cui sono presenti n bersagli per unità di volume, ciascuno di sezione trasversale σ. Se una particella colpisce il bersaglio, scompare dal fascio.Introdurre e risolvere l’equazione differenziale che descrive il numero di proiettili in funzione della profondità di penetrazione x.
S
Consideriamo uno strato del materiale, di spessore ∆x e area trasversale S. In questo strato si trovano n S ∆x bersagli.
L’area totale coperta dai bersagli è quindi:
xSnS ∆σ=∆
La probabilità che un proiettile colpisca un bersaglio è pari alrapporto tra l’area utile e l’area totale:
xnS
Sp ∆σ=∆=∆
Alla profondità x ci sono N(x) proiettili superstiti. Dopo il tratto ∆x, il numero diminuisce ulteriormente, di una quantità pari al numero di particelle per la probabilità che una particella colpisca il bersaglio. La variazione ∆N è negativa, sicché si ha:
xnNN ∆σ−=∆1
σ

3.b I sistemi lineari.Esercizi e complementi
nσ
eNnσeN
eNxd
Nd;eNN
Nnσxd
Nd;∆xNnσN∆
to
xo
xo
xo
=γ
−=γ−
γ−==
−==−
γ−γ−
γ−γ−
Equazione differenziale del sistema dinamico
Funzione di prova e derivata
Equazione algebrica caratteristica
σ prende il nome di sezione d’urto .Nei processi che coinvolgono particelle elementari, è un valore non esattamente riconducibile all’area di una sezione, quanto piuttosto a un parametro medio caratteristico del processo.
2
EsercizioNo particelle di un fascio entrano in una regione di spazio in cui sono presenti n bersagli per unità di volume, ciascuno di sezione trasversale σ. Se una particella colpisce il bersaglio, scompare dal fascio.Introdurre e risolvere l’equazione differenziale che descrive il numero di proiettili in funzione della profondità di penetrazione x.
Passando al limite per ∆x → 0 :
Infine:
xnσo eNN −=

La dipendenza dal tempo della funzione d’onda di un a particella di energia meccanica E
3.b I sistemi lineari.Esercizi e complementi
tE
i
o
to
xo
to
to
e
Ei
i
E
iE
eieE
etd
d;e
td
diE
h
hh
h
h
h
−
γγ
γγ
ψ=ψ
−==γ
γ=ψγ=ψ
ψγ=ψ
ψ=ψ
ψ=ψ Parte temporale dell’Equazione di Schrödinger
Funzione di prova e derivata
Equazione algebrica caratteristica
Soluzione
( )zImImImIm
( )zReReReRe
−−−−ω ω ω ω t
tio e ω−ψ=ψ
La funzione d’onda è un vettore che ruota in verso orario nel Piano di Gauss.


















