UNIVERSITÀ DEGLI STUDI DI PERUGIA - conan.diei.unipg.itconan.diei.unipg.it/webtlc/dispense/Parte...
38
Parte III – G. Reali: Modulazione numerica P Modulazione Numerica III.1 MODULAZIONE DI SEGNALI COMPLESSI IN BANDA BASE Nella trattazione che segue si prenderanno in esame dei segnali che, in generale, si possono considerare delle realizzazioni di processi aleatori. Il motivo per cui non si considerano dei processi aleatori nella loro interezza è per la semplicità di esposizione. Tuttavia, i risultati che si otterranno avranno validità generale. In pratica, si ipotizza che il segnale da trasmettere sia noto, cosa che ovviamente non si verifica nelle applicazioni. Si consideri, quindi, una sequenza di simboli a k , k=1…M, ossia di durata finita. Questa ipotesi occorre per assicurare l’esistenza delle trasformate di Fourier che saranno utilizzate nel corso della trattazione. Siccome non ci sono vincoli sul valore massimo di M, purché sia un valore finito, questa ipotesi non risulta essere particolarmente restrittiva. Il segnale da trasmettere si può scrivere come: () ( ) k k st agt kT ∞ =−∞ = − ∑ +Θ , dove g(t) è la funzione che modella l’impulso elementare dell’onda PAM e Θ è una fase aleatoria. Si supponga di usare s(t) per modulare in ampiezza una portante a frequenza f c . ( ) ( ) ( ) 2 c zt s t cos ft π φ = + 1
Transcript of UNIVERSITÀ DEGLI STUDI DI PERUGIA - conan.diei.unipg.itconan.diei.unipg.it/webtlc/dispense/Parte...

Parte III – G. Reali: Modulazione numerica P
Modulazione Numerica
III.1 MODULAZIONE DI SEGNALI COMPLESSI IN BANDA BASE
Nella trattazione che segue si prenderanno in esame dei segnali che, in generale, si
possono considerare delle realizzazioni di processi aleatori. Il motivo per cui non si
considerano dei processi aleatori nella loro interezza è per la semplicità di esposizione.
Tuttavia, i risultati che si otterranno avranno validità generale. In pratica, si ipotizza che
il segnale da trasmettere sia noto, cosa che ovviamente non si verifica nelle
applicazioni. Si consideri, quindi, una sequenza di simboli ak , k=1…M, ossia di durata
finita. Questa ipotesi occorre per assicurare l’esistenza delle trasformate di Fourier che
saranno utilizzate nel corso della trattazione. Siccome non ci sono vincoli sul valore
massimo di M, purché sia un valore finito, questa ipotesi non risulta essere
particolarmente restrittiva.
Il segnale da trasmettere si può scrivere come:
( ) ( )kk
s t a g t kT∞
=−∞= −∑ + Θ ,
dove g(t) è la funzione che modella l’impulso elementare dell’onda PAM e Θ è una fase
aleatoria. Si supponga di usare s(t) per modulare in ampiezza una portante a frequenza
fc.
( ) ( ) ( )2 cz t s t cos f tπ φ= +
1

Parte III – G. Reali: Modulazione numerica P
Per semplicità di notazione nel seguito la fase aleatoria della portante φ sarà posta
uguale a zero. Di conseguenza, se S(f) è la trasformata di Fourier di s(t), si ha che la
trasformata di Fourier di z(t) sarà data da
( ) ( ) (12 c c )Z f S f f S f f = − + +
Se s(t) è un segnale reale, la sua trasformata di Fourier risulta essere simmetrica intorno
all’origine dell’asse delle frequenze. Ciò implica che lo spettro del segnale modulato
sarà simmetrico intorno alla frequenza fc. Tale situazione è mostrata nella figura
sottostante.
0 fcf1 f20- fcf f
S(f) Z(f)
0 fcf1 f20- fcf f
S(f) Z(f)
La simmetria intorno alla frequenza fc implica che il segnale modulato abbia lo stesso
contenuto informativo sia nella banda laterale inferiore ( 1 cf f f≤ ≤ ) sia in quella
superiore ( 2cf f f≤ ≤ ). Nel caso delle modulazioni analogiche, le tecniche per evitare
tale spreco di banda consistevano nell’eliminare una delle due bande laterali
(modulazione SSB), o parte di questa (modulazione vestigiale). Nel caso numerico, si
può procedere raddoppiando il contenuto informativo del segnale. E’ evidente che per
far ciò occorre eliminare la simmetria dello spettro del segnale in banda base, quindi s(t)
deve essere un segnale a valori complessi. Chiaramente, modulando una portante
sinusoidale utilizzando un segnale complesso si avrebbe la situazione mostrata sotto
0f f
fcf1 f20- fc
S(f) Z(f)
0f f
fcf1 f20- fc
S(f) Z(f)
2

Parte III – G. Reali: Modulazione numerica P
Si vede che lo spettro del segnale modulato non è simmetrico rispetto all’origine, quindi
tale segnale non è reale e, di conseguenza, non può essere trasmesso attraverso un
canale un canale di comunicazione fisico. Per ovviare a questa situazione occorre
cambiare il tipo di modulazione.
Si immagini di traslare in frequenza S(f) intorno alla frequenza fc moltiplicandolo per un
esponenziale complesso come segue
( ) ( ) 2 cj f tz t s t e π= .
Chiaramente
( ) ( )cZ f S f f= − , come mostrato sotto.
0f f
fcf1 f20- fc
S(f) Z(f)
0f f
fcf1 f20- fc
S(f) Z(f)
E’ evidente che, anche in questo caso, z(t) è un segnale complesso, e quindi non può
essere trasmesso. Tuttavia si osserva che il contenuto informativo è interamente
presente sia nella parte reale sia nella parte immaginaria del segnale. Se si estrae dal
segnale la parte reale, data da
( ) ( ){ } ( ){ } ( ) ( ){ } ( )2 2 2 2 2c cx t Re z t Re s t cos f t Im s t sin fπ π= = − t
si ha che lo spettro X(f) è pari, e coincide con la componente pari di Z(f):
( ) ( )2 eX f Z= f
dove
( ) ( ) ( )12
*eZ f Z f Z f = + −
e quindi
( ) ( ) (22
*c c )X f S f f S f f = − + − − ,
come è illustrato nella figura sottostante.
3

Parte III – G. Reali: Modulazione numerica P
ffcf1 f20- fc
Z(f)
ffcf1 f20- fc
X(f)
ffcf1 f20- fc
Z(f)
ffcf1 f20- fc
Z(f)
ffcf1 f20- fc
X(f)
In questo modo x(t) è un segnale reale e, in quanto tale, può essere trasmesso attraverso
un canale fisico di comunicazione. Inoltre, il contenuto informativo di x(t) è lo stesso di
s(t), il quale è un segnale complesso. In questo modo è stato ottenuto l’obiettivo di
trasmettere il contenuto informativo di un segnale complesso in banda base, che è
maggiore di quello di un segnale reale, utilizzando un segnale modulato reale.
III.2 RAPPRESENTAZIONE DEI SEGNALI PAM PASSA-BANDA
Il segnale PAM passa-banda trasmesso può essere scritto come segue:
( ) ( ){ }( )
( ) { } ( ) ( ) { } ( )
2
2
2
2
2 2 2
c
c
j f t
j f tk
k
c k c kk k
x t Re e s t
Re e a g t kT
cos f t Re a g t kT sin f t Im a g t kT
π
π
π π
∞
=−∞
∞ ∞
=−∞ =−∞
= =
= − =
= − −
∑
∑ ∑ −
(III.2.1)
Questa rappresentazione suggerisce un metodo per realizzare x(t). La prima
considerazione da fare riguarda i simboli ak. E’ stato detto in precedenza che il segnale
in banda base è complesso, quindi, essendo l’impulso g(t) reale, l’unica componente
complessa è quella dei simboli ak. La relazione (III.2.1) suggerisce di trattare
separatamente la parte reale e la parte immaginaria di questi simboli. In pratica si tratta
di realizzare due segnali PAM, una usando la parte reale e l’altra mediante la parte
immaginaria dei simboli. Queste due onde PAM modulano in ampiezza due portanti in
quadratura. Data l’ortogonalità delle portanti, questo implica che le componenti reale ed
immaginaria del segnale sono trasmesse su due canali indipendenti.
4

Parte III – G. Reali: Modulazione numerica P
CODIFICATORE
generatore di portante
Filtro TX g(t)
BIT
Re[s(t)]
cos(2 πfct)2
Filtro TX g(t)
Re(ak)
Im(ak)
- sin(2 πfct)2
sfasatore 90o
Im[s(t)]
CODIFICATORE
generatore di portante
Filtro TX g(t)
Filtro TX g(t)
BIT
Re[s(t)]
cos(2 πfct)2 cos(2 πfct)22
Filtro TX g(t)
Filtro TX g(t)
Re(ak)
Im(ak)
- sin(2 πfct)2- sin(2 πfct)22
sfasatore 90o
Im[s(t)]
Figura III.2.1 - schema di un modulatore numerico
In Fig. III.2.1 è mostrato lo schema di un modulatore numerico. I bit in ingresso, che in
generale provengono dal codificatore di canale, sono rappresentati in forma complessa.
Questa rappresentazione sarà illustrata nel seguito. I filtri in trasmissione generano le
onde PAM utilizzando rispettivamente la parte reale e la parte immaginaria dei simboli.
Queste onde PAM successivamente modulano le due portanti in quadratura. Lo
sfasamento di 90° è realizzato mediante un filtro di Hilbert. I due segnali sono quindi
sommati ed inviati al canale di trasmissione.
III.3 RICEVITORI PER SEGNALI PAM PASSA-BANDA
Per demodulare un segnale PAM passa-banda, essenzialmente occorre realizzare delle
operazioni duali rispetto a quelle effettuate dal modulatore. Essenzialmente, occorre
riportare in banda base la componente dello spettro che presenta la stessa forma dello
spettro originario del segnale. Dal punto di vista matematico è sufficiente moltiplicare il
segnale ricevuto per un esponenziale complesso e filtrare la componente in banda base,
come mostrato nella figura sottostante.
ffc0- fc
R(f)
ffc0- fc
Q(f)
ffc0- fc
R(f)
ffc0- fc
Q(f)
5

Parte III – G. Reali: Modulazione numerica P
Al fine di determinare l’architettura del ricevitore si trascuri l’effetto distorcente del
canale e il rumore in ricezione. Questi saranno inclusi nel seguito per la valutazione
delle prestazioni. In tal caso si può assumere che il segnale ricevuto y(t) sia identico a
quello trasmesso x(t) a meno di una costante. Si ha quindi che
( ) ( )y t x tα=
Come detto in precedenza, per riportare la replica a frequenze positive dello spettro
ricevuto, che ha la stessa forma dello spettro del segnale originario, in banda base,
occorre moltiplicare y(t) per un esponenziale complesso:
( ) ( ) 2 cj fr t y t e π−= t ,
e successivamente filtrarlo con un filtro passa-basso:
( ) ( ) ( )2q t r t * f t= ,
dove con f(t) è stata indicata la risposta all’impulso del filtro passa basso e con il
simbolo e con l’asterisco l’integrale di convoluzione. Un primo schema generale di
decodifica è quello mostrato sotto. Nello schema le frecce singole indicano che il
segnale che transita è reale, mentre le frecce doppie indicano un segnale a valori
complessi. Si vede che la parte reale e la parte immaginaria di q(t) sono campionate. I
campioni sono quindi confrontati con una soglia e successivamente decodificati.
2 cj f te π−
filtro di ricezione f(t) campionatore
decodificatorebity(t) q(t) qk akak
22
Uno schema più realistico, il quale tuttavia rispecchia fedelmente il funzionamento di
quello appena presentato è mostrato sotto. Nello schema sotto il prodotto complesso è
stato sostituito con due prodotti reali, quindi fisicamente realizzabili, con due portanti in
quadratura. Le operazioni successive sono identiche a quelle del primo schema.
6
Parte III – G. Reali: Modulazione numerica P
( )2 ccos f tπ
filtro di ricezione f(t)filtro di ricezione f(t)
campionatorecampionatore
decodificatorebitakaky(t)
( )2 csin f tπ−
filtro di ricezione f(t)
campionatorecampionatore
componentein fase
componentein quadratura
22
22
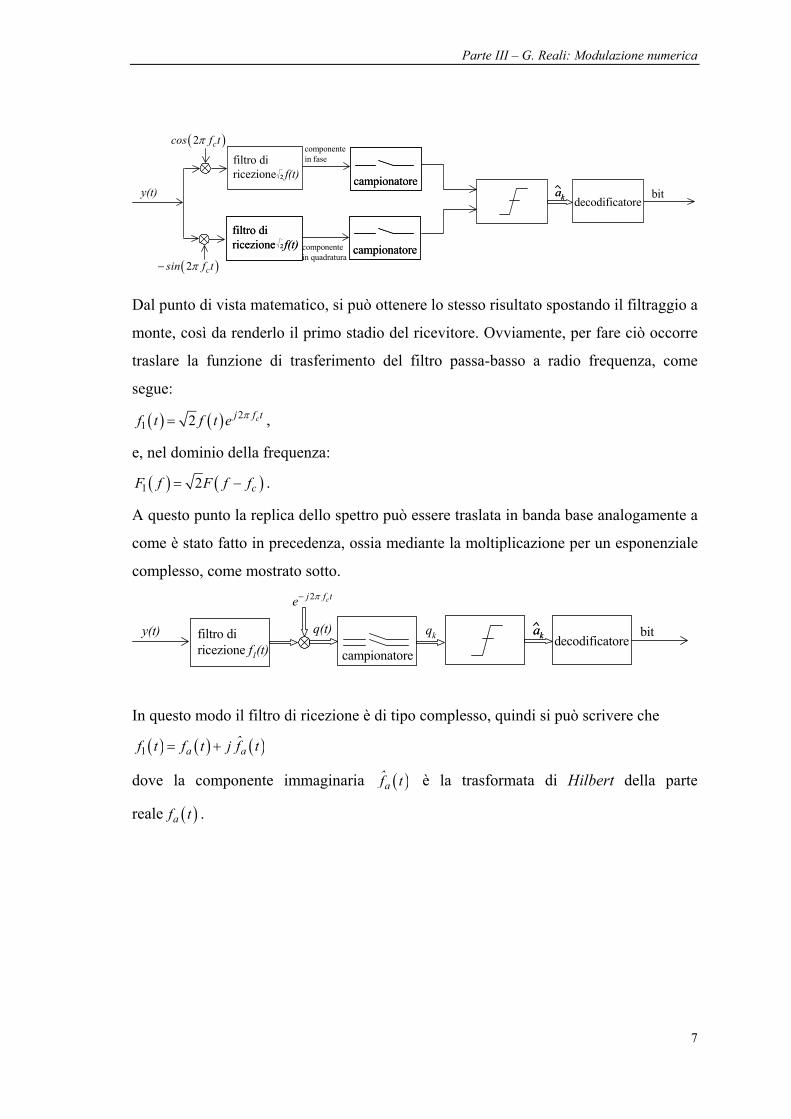
Dal punto di vista matematico, si può ottenere lo stesso risultato spostando il filtraggio a
monte, così da renderlo il primo stadio del ricevitore. Ovviamente, per fare ciò occorre
traslare la funzione di trasferimento del filtro passa-basso a radio frequenza, come
segue:
( ) ( ) 21 2 cj ff t f t e π= t ,
e, nel dominio della frequenza:
( ) ( )1 2 cF f F f= − f .
A questo punto la replica dello spettro può essere traslata in banda base analogamente a
come è stato fatto in precedenza, ossia mediante la moltiplicazione per un esponenziale
complesso, come mostrato sotto. 2 cj f te π−
filtro di ricezione f1(t) campionatore
decodificatorebity(t) q(t) qk akak
In questo modo il filtro di ricezione è di tipo complesso, quindi si può scrivere che
( ) ( ) ( )1 a aˆf t f t j f t= +
dove la componente immaginaria ( )af̂ t è la trasformata di Hilbert della parte
reale ( )af t .
7

Parte III – G. Reali: Modulazione numerica P
III.4 STATISTICA DEL RUMORE ALL’USCITA DEL FILTRO DI RICEZIONE
Per la valutazione delle prestazioni del sistema occorre tenere in considerazione
l’effetto del rumore. Si consideri il classico modello additivo del rumore all’ingresso del
filtro di ricezione, come mostrato sotto.
filtro di ricezione f1(t)
y(t)
n(t)
…
Il rumore è modellato come un processo bianco e gaussiano, a media nulla e con
varianza N0 (Additive White Gaussian Noise – AWGN(0, N0)).
Lo spettro di densità di potenza del rumore all’uscita del filtro di ricezione risulterà
sagomato dalla funzione di trasferimento del filtro stesso, quindi non sarà bianco. La
sua espressione è:
( ) ( ) ( )2 20 1 02n cS f N F f N F f f= = −
La potenza del rumore all’uscita del filtro di ricezione è data da
( ) ( ) ( )2 20 1 0 1 02NP N F f dt N f t dt N f t d
∞ ∞ ∞
−∞ −∞ −∞= = =∫ ∫ ∫
2t .
L’ultima uguaglianza è dovuta al fatto che la trasformata di Hilbert ha la stessa energia
della funzione che ha subito la trasformazione.
III.5 RICEVITORE A CORRELAZIONE
In precedenza è stato usato un filtro di ricezione, passa-basso o passa-banda a seconda
dello schema di ricevitore utilizzato, che aveva come unico compito quello di consentire
il transito del segnale eliminando il rumore fuori banda. Il progetto del filtro di
ricezione può essere migliorato se oltre alla larghezza di banda del segnale si considera
anche la forma di questo. Si consideri di dover ricevere un impulso isolato (questa
ipotesi corrisponde alla condizione di azzeramento dell’interferenza intersimbolo). Si
supponga, inoltre, che in ricezione possano presentarsi impulsi aventi una delle M
8

Parte III – G. Reali: Modulazione numerica P
possibili forme d’onda {s1(t)… sM(t)}, (che possono, eventualmente, essere
rappresentate in uno spazio ortonormale generato dalla base {g1(t)… gN(t)}. Se si riceve
l’m-esima di queste forme d’onda il segnale ricevuto sarà
)()()( tntstR m +=
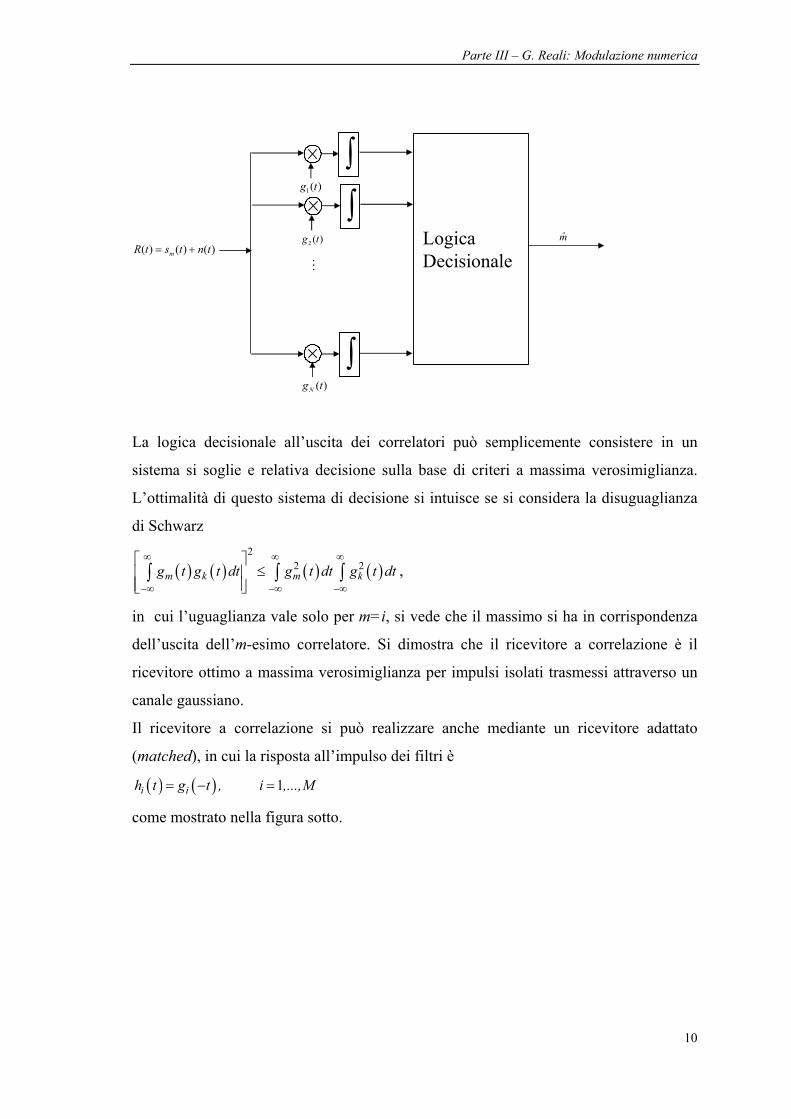
Per determinare quale delle possibili forme d’onda sia stata ricevuta, si può pensare di
operare M integrali di correlazione secondo lo schema mostrato sotto.
…∫∫
∫∫
∫∫
MAX
m̂)()()( tntstR m +=
)(tsM
)(1 ts
)(2 ts
A valle degli M correlatori vi è un decisore che seleziona il valore massimo fra quelli
presenti in ingresso ad esso.
Per ridurre la complessità circuitale del ricevitore si può pensare di utlizzare la base
ortonormale secondo lo schema che segue.
9
Parte III – G. Reali: Modulazione numerica P
…
∫∫
∫∫
∫∫
Logica Decisionale
m̂)()()( tntstR m +=
)(tgN
)(1 tg
)(2 tg
La logica decisionale all’uscita dei correlatori può semplicemente consistere in un
sistema si soglie e relativa decisione sulla base di criteri a massima verosimiglianza.
L’ottimalità di questo sistema di decisione si intuisce se si considera la disuguaglianza
di Schwarz
( ) ( ) ( ) ( )2
2 2m k m kg t g t dt g t dt g t dt
∞ ∞ ∞
−∞ −∞ −∞
≤
∫ ∫ ∫ ,
in cui l’uguaglianza vale solo per m=i, si vede che il massimo si ha in corrispondenza
dell’uscita dell’m-esimo correlatore. Si dimostra che il ricevitore a correlazione è il
ricevitore ottimo a massima verosimiglianza per impulsi isolati trasmessi attraverso un
canale gaussiano.
Il ricevitore a correlazione si può realizzare anche mediante un ricevitore adattato
(matched), in cui la risposta all’impulso dei filtri è
( ) ( ) 1i ih t g t , i ,...,M= − =
come mostrato nella figura sotto.
10
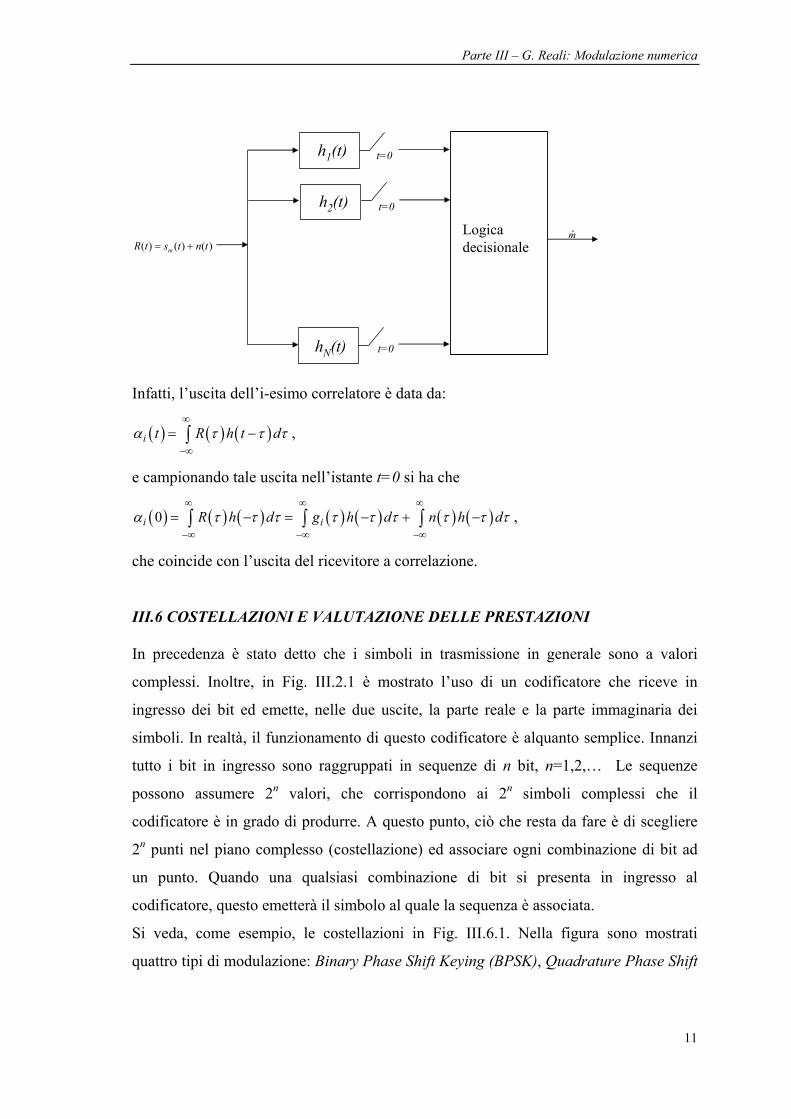
Parte III – G. Reali: Modulazione numerica P
Logica decisionale
m̂
h1(t)
h2(t)
hN(t)
t=0
t=0
t=0
)()()( tntstR m +=
Infatti, l’uscita dell’i-esimo correlatore è data da:
( ) ( ) ( )i t R h t dα τ τ∞
−∞= −∫ τ ,
e campionando tale uscita nell’istante t=0 si ha che
( ) ( ) ( ) ( ) ( ) ( ) ( )0i iR h d g h d n h dα τ τ τ τ τ τ τ τ∞ ∞ ∞
−∞ −∞ −∞= − = − + −∫ ∫ ∫ τ ,
che coincide con l’uscita del ricevitore a correlazione.
III.6 COSTELLAZIONI E VALUTAZIONE DELLE PRESTAZIONI
In precedenza è stato detto che i simboli in trasmissione in generale sono a valori
complessi. Inoltre, in Fig. III.2.1 è mostrato l’uso di un codificatore che riceve in
ingresso dei bit ed emette, nelle due uscite, la parte reale e la parte immaginaria dei
simboli. In realtà, il funzionamento di questo codificatore è alquanto semplice. Innanzi
tutto i bit in ingresso sono raggruppati in sequenze di n bit, n=1,2,… Le sequenze
possono assumere 2n valori, che corrispondono ai 2n simboli complessi che il
codificatore è in grado di produrre. A questo punto, ciò che resta da fare è di scegliere
2n punti nel piano complesso (costellazione) ed associare ogni combinazione di bit ad
un punto. Quando una qualsiasi combinazione di bit si presenta in ingresso al
codificatore, questo emetterà il simbolo al quale la sequenza è associata.
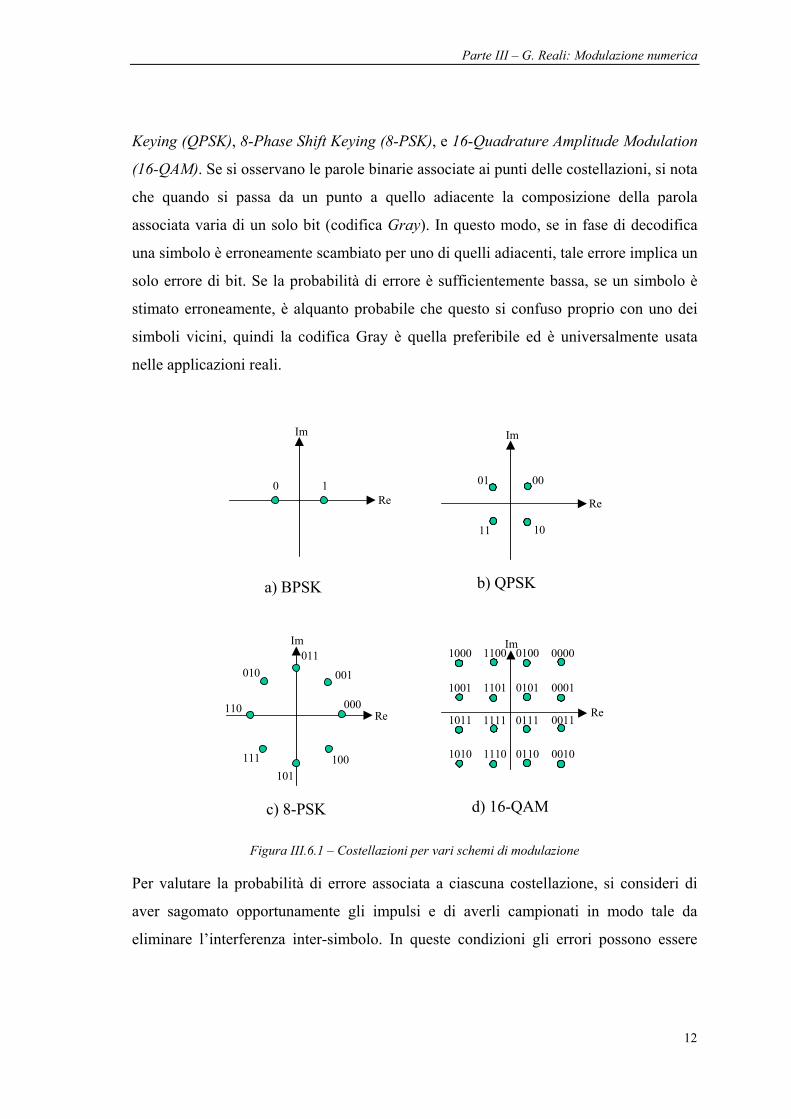
Si veda, come esempio, le costellazioni in Fig. III.6.1. Nella figura sono mostrati
quattro tipi di modulazione: Binary Phase Shift Keying (BPSK), Quadrature Phase Shift
11
Parte III – G. Reali: Modulazione numerica P
Keying (QPSK), 8-Phase Shift Keying (8-PSK), e 16-Quadrature Amplitude Modulation
(16-QAM). Se si osservano le parole binarie associate ai punti delle costellazioni, si nota
che quando si passa da un punto a quello adiacente la composizione della parola
associata varia di un solo bit (codifica Gray). In questo modo, se in fase di decodifica
una simbolo è erroneamente scambiato per uno di quelli adiacenti, tale errore implica un
solo errore di bit. Se la probabilità di errore è sufficientemente bassa, se un simbolo è
stimato erroneamente, è alquanto probabile che questo si confuso proprio con uno dei
simboli vicini, quindi la codifica Gray è quella preferibile ed è universalmente usata
nelle applicazioni reali.
000
001010011
100101
110
111
0001
0010
0011
0100
0101
01101010
1011
1100
1101
1110
0001
1011
0 1
00001000
0111
1001
1111
a) BPSK b) QPSK
c) 8-PSK d) 16-QAM
Re
Im
Re
Im
Re
Im
Re
Im
Figura III.6.1 – Costellazioni per vari schemi di modulazione
Per valutare la probabilità di errore associata a ciascuna costellazione, si consideri di
aver sagomato opportunamente gli impulsi e di averli campionati in modo tale da
eliminare l’interferenza inter-simbolo. In queste condizioni gli errori possono essere
12

Parte III – G. Reali: Modulazione numerica P
causati unicamente dal rumore termico. Una costellazione QPSK affetta da rumore si
presenta come mostrato in Fig. III.6.2
Re
Im
Figura III.6.2 – Rappresentazione sul piano complesso dei campioni affetti da rumore, estratti dal segnale ricevuto quando in trasmissione è utilizzata una costellazione QPSK.
Osservando la figura si intuisce che la probabilità di errore dipende dall’effetto del
rumore sui punti della costellazione. Infatti, siccome il valore dei simboli è alterato dal
rumore, questi si dispongono sul piano complesso in una regione intorno alla posizione
che assumerebbe il simbolo in assenza di rumore. Se tale scostamento è maggiore della
distanza da un qualsiasi altro punto della costellazione allora, siccome il simbolo
ricevuto è erroneamente interpretato come quello dal quale la distanza è minima, si
commette un errore di stima. Dato che la statistica del rumore è di tipo gaussiano,
questo implica che i punti sparsi nel piano complesso di distribuiscono intorno ai punti
della costellazione secondo una statistica gaussiana bidimensionale con varianza PN.
Siccome la componenti reale ed immaginaria della funzione di densità di probabilità
gaussiana bidimensionale del rumore sono statisticamente indipendenti, la potenza della
componente reale del rumore e della parte immaginaria del rumore sono uguali e pari a
σ =PN /2. Si supponga che aj sia un simbolo della costellazione, e che Qk=aj+Zk sia il
simbolo ricevuto. Il simbolo ricevuto è interpretato come ai≠ aj se
k i kQ a Q a− < − j ,
che equivale a dire 2 2
j i k ka a Z Z− + < ,
cioè
13

Parte III – G. Reali: Modulazione numerica P
{ } { } { } { }22 2i j i j k i j ka a Re a a Re Z Im a a Im Z− + − + − < 0
che diventa:
{ } { } { } { }2
2i j k i j kdRe a a Re Z Im a a Im Z− + − < −
2
(III.6.1)
dove d=| aj - ai|.
La relazione (III.6.1) è la combinazione lineare di due variabili aleatorie gaussiane
indipendenti, a media nulla, e con varianza σ2. Ciò produce una variabile aleatoria
ancora gaussiana con varianza
{ } { }2 2 2 2i j i jRe a a Im a a dσ σ − + − =
La probabilità che tale variabile aleatoria sia minore di -d2/2 è data da: 2 2
2 2
2
2 2
22
1 122 2
de
dd
dP e d e d Qd
α τσ
σ
α τσσ π π
−∞ ∞− −
−
= =
∫ ∫ = ,
dove la funzione Q(x) è definita come
( )2
212 x
Q x e dτ
τπ
+∞ −= ∫
ossia è l’integrale della ‘coda’ della funzione gaussiana normalizzata a partire da x.
Esempio: modulazione BPSK
-a aRe
Im
Nel caso della costellazione mostrata in figura, la probabilità di errore è
eaP Qσ
=
14

Parte III – G. Reali: Modulazione numerica P
Esempio: modulazione QPSK
Re
Im
a,a
a,-a-a,-a
-a,a
Un simbolo è stimato correttamente se è stimata correttamente sia la parte reale sia
quella immaginaria. Le probabilità di stima corretta della parte reale e della parte
immaginaria hanno lo stesso valore, pari a
e,r e,iaP P Qσ
= =
quindi, la probabilità di stima corretta di un simbolo è data da 2
1caP Qσ
= −
e la probabilità di errore è data da 2 2
1 1 2 2ea a aP Q Q Q Q aσ σ σ
= − − = − σ
L’ultimo passaggio della relazione sopra vale se il rapporto a/σ è sufficientemente alto,
ossia, come sarà dimostrato nel seguito, se il rapporto segnale-rumore in ingresso al
decisore a soglia è elevato.
Si assuma che la sequenza di simboli Ak da trasmettere sia la realizzazione di un
processo bianco con spettro ( )2j fTAS e π β= . La potenza di tale processo { }2
kE A β= .
Escludendo il rumore, il segnale ricevuto è quindi un’onda PAM, che è la realizzazione
di un processo aleatorio avente spettro di densità di potenza
( ) ( ) ( ) { }( )
22 221 kj fT
q A
E AS f W f S e W f
T Tπ= = ,
15

Parte III – G. Reali: Modulazione numerica P
dove W(f) è la trasformata di Fourier della forma d’onda demodulata in corrispondenza
di un simbolo trasmesso. Si suppone che la sagomatura dei simboli sia tale da evitare
l’interferenza inter-simbolo e che, senza perdere di generalità, abbia un’ampiezza tale
che
( ) 2W f df T
∞
−∞=∫
Tale ipotesi non è restrittiva dal momento che se il filtro di ricezione è scalato
opportunamente per ottenere il valore desiderato dell’integrale, tale effetto è prodotto
anche sul rumore e, quindi, il rapporto segnale-rumore resta invariato. Tale rapporto si
può esprimere come
( ) { }2
2 22 2
q kS f df E APotenza del segnaleSNR
Potenza del rumore σ σ
∞
−∞= = =∫
Questo consente di esprimere la probabilità di errore delle varie costellazioni in
funzione di SNR.
Esempio: modulazione BPSK
-a aRe
Im
In questo caso { }2 2kE A = a . Considerando che in questo caso la componente in
quadratura del rumore può essere eliminata isolando la sola componente in fase del
segnale ricevuto, ove è presente l’informazione, la potenza del rumore vale σ2, e la
probabilità di errore si può esprimere come
16

Parte III – G. Reali: Modulazione numerica P
( )SNRQaQPe =
=
σ
Esempio: modulazione QPSK
Re
Im
a,a
a,-a-a,-a
-a,a
In questo caso { }2 22kE A = a , quindi, considerando sia la componente in fase sia la
componente in quadratura del rumore, la probabilità di errore si può esprimere come
( ) ( )[ ] ( )SNRQSNRQSNRQPe 222
≅−=
dove l’ultimo passaggio e della relazione è ammissibile solo se SNR>>1.
In Fig. III.6.2 sono mostrate le probabilità di errore di simbolo per le costellazioni
BPSK, QPSK e 16-QAM al variare del rapporto segnale-rumore. E’ evidente come la
maggiore quantità di informazione che si trasmette utilizzando costellazioni complesse
si paga con delle richieste onerose dal punto di vista del rapporto segnale-rumore per
stimare i simboli con probabilità di errore desiderata.
17

Parte III – G. Reali: Modulazione numerica P
2 4 6 8 10 12 14 16 18 2010-10
10-8
10-6
10-4
10-2
100
BPSK QPSK 16-QAM
Figura III.6.2 – Probabilità di errore di simbolo per le tecniche di modulazione BPSK, QPSK e 16-QAM
Spesso le probabilità di errore sono indicate in funzione del rapporto fra l’energia media
di bit Eb e il valore (costante al variare della frequenza) dello spettro di densità di
rumore N0/2=KT/2 anziché in funzione di SNR. Eb può anche essere vista come la
potenza media del segnale suddivisa per il numero medio di bit trasmessi
contemporaneamente, ossia il numero medio di bit associati ai punti della costellazione,
in un hertz di banda. Analogamente, N0 può essere visto come la potenza media del
rumore in un hertz di banda. Chiaramente SNR=KEb/N0, dove K è il numero medio di
bit associati ai punti della costellazione.
18

Parte III – G. Reali: Modulazione numerica P
Esempio
modulazione BPSK: ( )2 2 be
0
EP Q SNR QN
= =
modulazione QPSK: ( )0
2 2 2 be
EP Q SNR QN
=
Quindi, a parte il fattore moltiplicativo, gli schemi di modulazione BPSK e QPSK
hanno la stessa dipendenza dal rapporto Eb/N0
19

Parte III – G. Reali: Modulazione numerica P
III.7 MODULAZIONI ANGOLARI
Quando i simboli emessi da una sorgente sono usati per alterare la fase di una portante, si
ottiene una modulazione numerica della fase. Si consideri una sequenza di K bit. Questi
possono generare il seguente segnale:
( )1
2
02 c
Kj f t
kk
0x(t ) Re a g t kT e t KT π−
=
= − ≤ <
∑ (III.7.1)
dove kjka e ϕ= , e ϕk appartiene all’insieme
1
2 1M
i( i )
Mπ φ
=
− +
con φ una fase aleatoria e costante nel tempo. Sia g(t) un impulso rettangolare di
ampiezza A e durata T. Il segnale nella (III.7.1) diventa:
12 2
02 Trect
K2X( t ) A ( t kT )cos( f t ) I( t )cos( f t ) Q( t )sin( f t )c ckk
π ϕ π π−
= − + = −∑=
c (III.7.2)
dove 1
02
K
k Tk
I( t ) A cos rect ( t kT )ϕ−
== ∑ − (III.7.3)
1
02
K
k Tk
Q( t ) A sen rect ( t kT )ϕ−
== ∑ − (III.7.4)
Caso BPSK
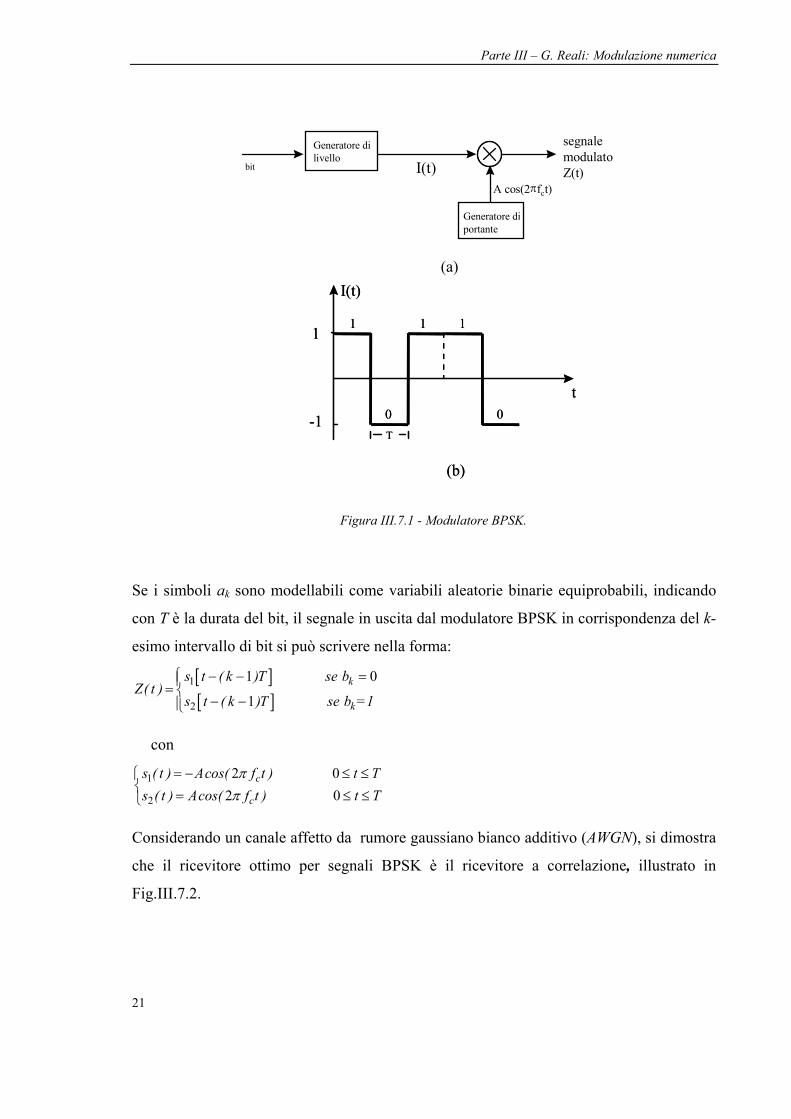
Nel caso di modulazione PSK-binaria (BPSK), si può verificare immediatamente come il
cambiamento di fase della portante corrisponda al cambiamento di segno della sua
ampiezza. In Fig. III.7.1 è mostrato un modulatore BPSK.
20
Parte III – G. Reali: Modulazione numerica P
Generatore dilivello
bit
A cos(2πfct)
segnalemodulatoZ(t)I(t)
(a)
T
0 0
1 11
t
I(t)
-1
1
(b)
T
0 0
1 11
t
I(t)
-1
1
(b)
Generatore diportante
Figura III.7.1 - Modulatore BPSK.
Se i simboli ak sono modellabili come variabili aleatorie binarie equiprobabili, indicando
con T è la durata del bit, il segnale in uscita dal modulatore BPSK in corrispondenza del k-
esimo intervallo di bit si può scrivere nella forma:
[ ][ ]
1
2
1 0
1k
k
s t ( k )T se bZ( t )
s t ( k )T se b =1
− − == − −
con
1
2
2 02 0
c
c
s ( t ) Acos( f t ) t Ts ( t ) Acos( f t ) t T
ππ
= − ≤ ≤ = ≤ ≤
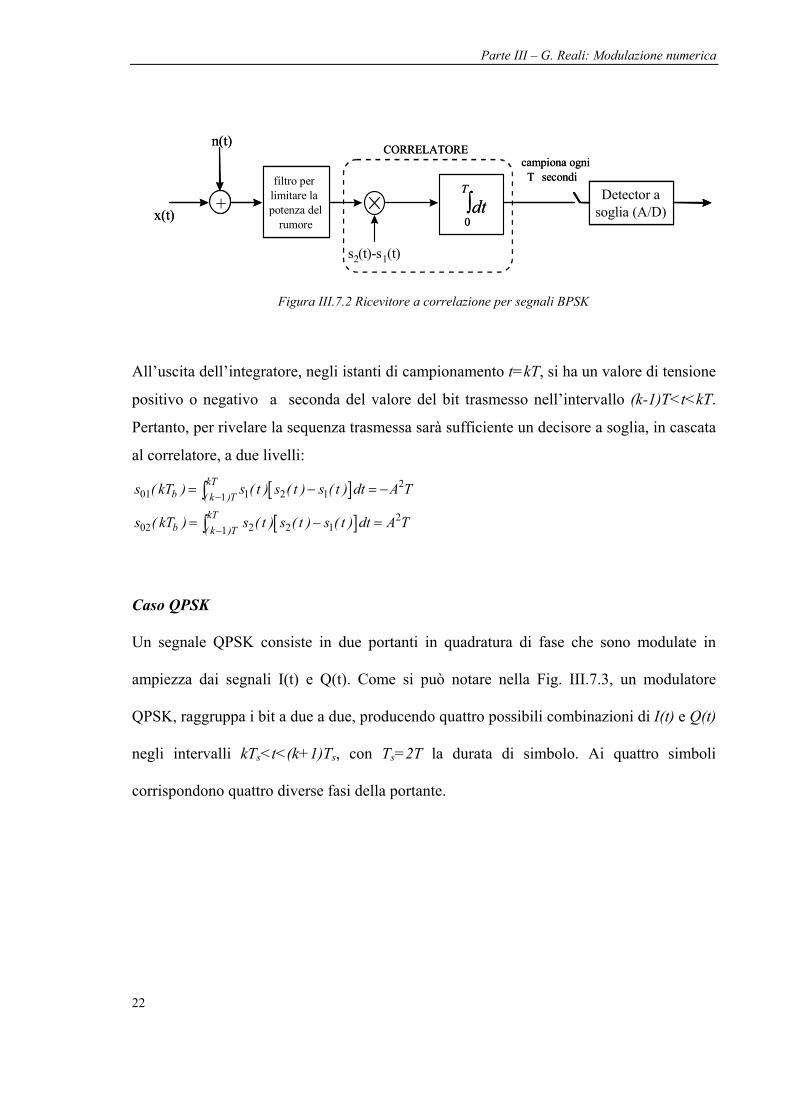
Considerando un canale affetto da rumore gaussiano bianco additivo (AWGN), si dimostra
che il ricevitore ottimo per segnali BPSK è il ricevitore a correlazione, illustrato in
Fig.III.7.2.
21
Parte III – G. Reali: Modulazione numerica P
x(t)
s2(t)-s1(t)
filtro per limitare la potenza del
rumore+ Detector a
soglia (A/D)dtT
0∫
n(t)campiona ogniT secondi
CORRELATORE
x(t)
s2(t)-s1(t)
filtro per limitare la potenza del
rumore+ Detector a
soglia (A/D)Detector a
soglia (A/D)dtT
0∫dt
T
0∫
n(t)campiona ogniT secondi
CORRELATORE
Figura III.7.2 Ricevitore a correlazione per segnali BPSK
All’uscita dell’integratore, negli istanti di campionamento t=kT, si ha un valore di tensione
positivo o negativo a seconda del valore del bit trasmesso nell’intervallo (k-1)T<t<kT.
Pertanto, per rivelare la sequenza trasmessa sarà sufficiente un decisore a soglia, in cascata
al correlatore, a due livelli:
[ ]
[ ]
201 1 2 11
202 2 2 11
kTb ( k )T
kTb ( k )T
s ( kT ) s ( t ) s ( t ) s ( t ) dt A T
s ( kT ) s ( t ) s ( t ) s ( t ) dt A T
−
−
= −
= −
∫
∫
= −
=
Caso QPSK
Un segnale QPSK consiste in due portanti in quadratura di fase che sono modulate in
ampiezza dai segnali I(t) e Q(t). Come si può notare nella Fig. III.7.3, un modulatore
QPSK, raggruppa i bit a due a due, producendo quattro possibili combinazioni di I(t) e Q(t)
negli intervalli kTs<t<(k+1)Ts, con Ts=2T la durata di simbolo. Ai quattro simboli
corrispondono quattro diverse fasi della portante.
22

Parte III – G. Reali: Modulazione numerica P
Esempio
Si consideri la costellazione mostrata sotto
0001
1011
Re
Im
Per la coppia di bit in ingresso (1,1) nell’intervallo kTs<t<(k+1)Ts si avrà:
( ) ( ) 32 2 2 2 24c c cx( t ) A cos f t s i n f t A cos f tπ π π = − − = −
π
Le fasi per le altre combinazioni di bit sono mostrate in Tabella III.7.1. Osservando la
figura, risulta evidente come si possano verificare salti di fase di π; infatti, se dopo la
coppia (1,1) occorre trasmettere la coppia (0,0), la fase salta da -3π/4 a π/4. Per questo
motivo sono state realizzate modulazioni di tipo OQPSK, che sarà trattata nel seguito, e
π/4-QPSK, per le quali non ci sono salti di fase di π. In Figura III.7.3 è mostrata
l’evoluzione temporale della forma d’onda QPSK.
INFORMAZIONE Fase Trasmessa
00 +π/4
01 +3π/4
11 -3π/4
10 -π/4Tabella III.7.1 Fase della portante modulata QPSK in funzione del valore della coppia di bit da
trasmettere.
23

Parte III – G. Reali: Modulazione numerica P
CONVERTITORESERIALE / PARALLELO
SFASATORE90°
GENERATOREDI LIVELLO
bit SEGNALEMODULATO
I(t)
Q(t)
Acos(2π fct)
GENERATOREDI PORTANTE
-Asin(2 π fct)
GENERATOREDI LIVELLO
(a)
Sequenza di dati101 1 10 0 0 0 0
1
-1
1
-1
Ts
t
t
I(t)
Q(t)
(b)
Figura III.7.3 - Modulatore QPSK
24

Parte III – G. Reali: Modulazione numerica P
Il demodulatore coerente per la modulazione QPSK è più complesso rispetto a quello per
la modulazione BPSK. Ricordando, infatti, che il segnale trasmesso x(t) è del tipo (III.7.2),
si nota che in questo caso siano quattro le possibili forme d’onda trasmesse:
1
2
3
4
2 24
2 24
02 2
4
2 24
c
c
s
c
c
s ( t ) A cos f t
s ( t ) A s i n f t per t T
s ( t ) A cos f t
s ( t ) As i n f t
ππ
ππ
ππ
ππ
= +
= − + ≤ ≤ = − +
= +
E’ evidente che sono necessari due correlatori, come mostrato in Fig. III.7.4, per estrarre
l’informazione dalle due portanti in quadratura.
In Tabella III.7.2 sono elencati tutti i possibili livelli in uscita dai correlatori in
corrispondenza delle diverse combinazioni di bit trasmessi.
INPUT
OUTPUT s1(t)
(simbolo 00)
s2(t)
(simbolo 01)
s3(t)
(simbolo 11)
s4(t)
(simbolo 10)
s01 -L0 -L0 L0 L0
s02 -L0 L0 L0 -L0
Tabella c.7.2 - Livelli in uscita dai correlatori in corrispondenza del segnale trasmesso.
25

Parte III – G. Reali: Modulazione numerica P
campionamentocon periodo Ts
Correlatore 1
Correlatore 2
dtTs
0∫
dtTs
0∫
+
n(t)
x(t)
so1(Ts)
so2(Ts)
A cos(2πfct)
A sin(2 πfct)
campionamentocon periodo Ts
Correlatore 1
Correlatore 2
dtTs
0∫dtTs
0∫
dtTs
0∫dtTs
0∫
++
n(t)n(t)
x(t)x(t)
so1(Ts)
so2(Ts)
A cos(2πfct)
A sin(2 πfct)
Figura III.7.4 - Ricevitore a correlazione per segnali QPSK
Dalle quattro combinazioni di s01 e s02 si può, pertanto, ricostruire la sequenza di bit
trasmessa.
III.8 OQPSK (OFFSET QPSK).
Nel caso di modulazione QPSK la fase della portante cambia ogni periodo 2T, essendo T la
durata del bit. In corrispondenza di due simboli trasmessi in successione, quando cambia il
segno di una delle due componenti in quadratura si verifica un salto di fase di π/2; se,
invece, entrambe le componenti cambiano polarità, si verifica un salto di fase di π.
La Offset-QPSK (OQPSK), altrimenti detta SQPSK (Staggered-QPSK), può essere
descritta in maniera del tutto equivalente alla QPSK. La differenza tra i due schemi di
modulazione consiste nel fatto che nella OQPSK le due componenti in quadratura I(t) e
Q(t) non sono allineate, come mostrato in Fig. III.8.1, ma la Q(t) è ritardata rispetto a I(t)
26
Parte III – G. Reali: Modulazione numerica P
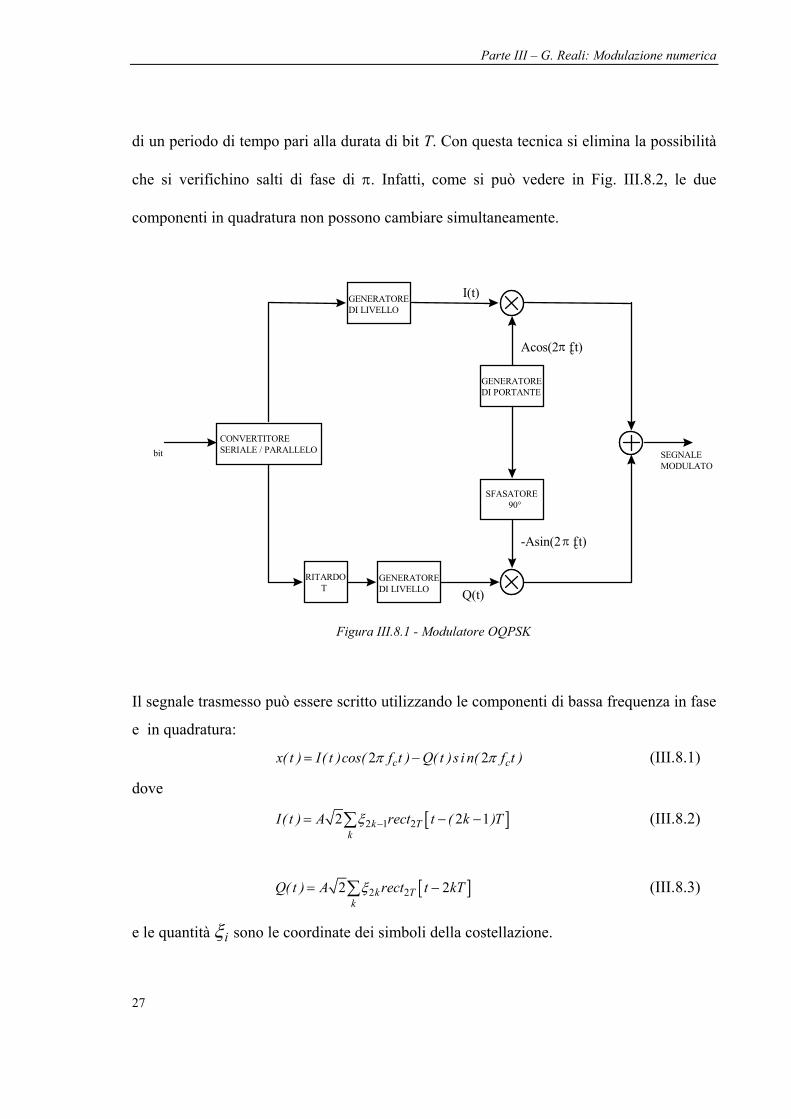
di un periodo di tempo pari alla durata di bit T. Con questa tecnica si elimina la possibilità
che si verifichino salti di fase di π. Infatti, come si può vedere in Fig. III.8.2, le due
componenti in quadratura non possono cambiare simultaneamente.
GENERATOREDI LIVELLO
bit
I(t)
Q(t)RITARDO
T
GENERATOREDI LIVELLO
CONVERTITORESERIALE / PARALLELO
Acos(2π fct)
-Asin(2π fct)
SFASATORE90°
GENERATOREDI PORTANTE
SEGNALEMODULATO
Figura III.8.1 - Modulatore OQPSK
Il segnale trasmesso può essere scritto utilizzando le componenti di bassa frequenza in fase
e in quadratura:
2 c 2 cx( t ) I( t )cos( f t ) Q( t )s i n( f t )π π= − (III.8.1)
dove
[ ]2 1 22 k Tk
I( t ) A rect t ( k )Tξ −= −∑ 2 1− (III.8.2)
[ ]2 22 k Tk
Q( t ) A rect t kTξ= ∑ 2− (III.8.3)
e le quantità ξi sono le coordinate dei simboli della costellazione.
27

Parte III – G. Reali: Modulazione numerica P
Q(t) (OQPSK)
1
-1
Sequenza di dati101 1 10 0 0 0 0
Sequenza di dati101 1 10 0 0 0 0
1
-1
Q(t) (QPSK)
1
-1
Ts
I(t) (QPSK e OQPSK)
T
t
t
t
Figura III.8.2 - Forme d’onda dei canali in fase e quadratura per una generica sequenza di ingresso
La relazione (III.8.1) implica che la sequenza ξ k è divisa in una sequenza dispari ξ 2k-1 e
una pari ξ 2k. Queste due sequenze sono usate per determinare il segno della forma d’onda
durante gli intervalli dispari, 2 1 2 1( k )T ( k )Tt− ≤ < + , e negli intervalli pari,
. Le forme d’onda, per entrambi i canali, sono due onde quadre di
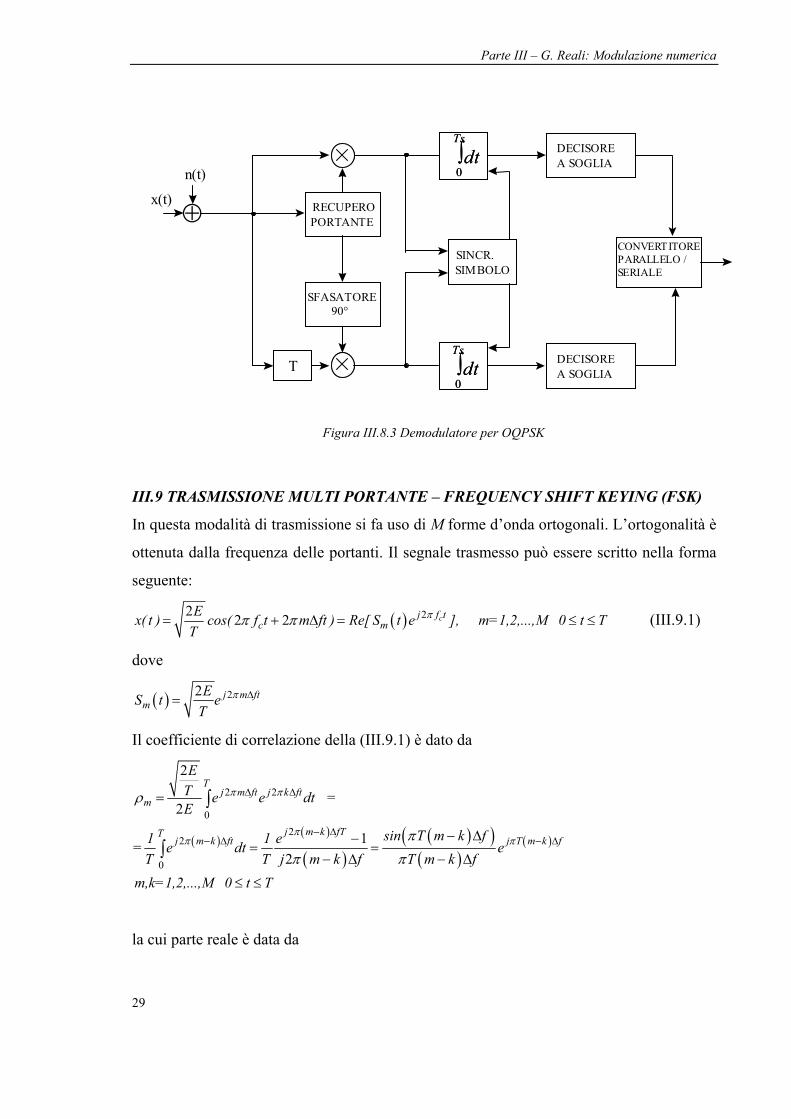
ampiezza unitaria e durata 2T. Il demodulatore coerente per la OQPSK, mostrato in
Fig.III.8.3, è essenzialmente quello visto per la QPSK, con l’eccezione che i simboli nel
canale Q sono ritardati di T, cioè della durata di bit. In tal modo si può dimostrare che le
prestazioni riguardanti la probabilità di errore sono identiche a quelle della QPSK.
2 2kT t k )T≤ < + 2(
28
Parte III – G. Reali: Modulazione numerica P
DECISOREA SOGLIA
SINCR.SIMBOLO
CONVERTITOREPARALLELO /SERIALE
RECUPEROPORTANTE
SFASATORE90°
dtTs
0∫dtTs
0∫
dtTs
0∫dt
Ts
0∫TT
⊕x(t)
n(t)
DECISOREA SOGLIA
Figura III.8.3 Demodulatore per OQPSK
III.9 TRASMISSIONE MULTI PORTANTE – FREQUENCY SHIFT KEYING (FSK)
In questa modalità di trasmissione si fa uso di M forme d’onda ortogonali. L’ortogonalità è
ottenuta dalla frequenza delle portanti. Il segnale trasmesso può essere scritto nella forma
seguente:
( ) 22 2 2 cj f tc m
Ex( t ) cos( f t m ft ) Re[ S t e ], m=1,2,...,M 0 t TT
ππ π= + ∆ = ≤ ≤ (III.9.1)
dove
( ) 22 j m ftm
ES t eT
π ∆=
Il coefficiente di correlazione della (III.9.1) è dato da
( )( )
( )( )( )
( )( )
2 2
02
2
0
2
2
12
Tj m ft j k ft
m
j m k fTTj m k ft j T m k f
ET e e dt = E
sin T m k f1 1 e= e dt eT T j m k f T m k f
m,k=1,2,...,M 0 t T
π π
ππ π
ρ
ππ π
∆ ∆
− ∆− ∆ − ∆
=
− ∆−= =
− ∆ − ∆
≤ ≤
∫
∫
la cui parte reale è data da
29

Parte III – G. Reali: Modulazione numerica P
( )( )( ) ( )( )
( )( )( )
( )2
2
r msin T m k f cos T m k f
ReT m k f
sin T m k f, m,k=1,2,...,M 0 t T
T m k f
π πρ ρ
π
ππ
− ∆ − ∆= =
− ∆
− ∆≤ ≤
− ∆
=
La prima osservazione che si può fare è che se ∆f è un multiplo intero di1/2T e m≠k allora
ρr=0. Siccome la condizione |m-k|=1 indica che le due portanti corrispondenti agli indici
m e k sono adiacenti, allora ∆f=1/2T è la minima separazione spettrale fra le portanti che
assicura l’ortogonalità.
III.10 MODULAZIONI A FASE CONTINUA - CONTINUOUS PHASE
MODULATION (CPM)
In questo tipo di modulazione la fase della portante è una funzione continua nel tempo, e si
può rappresentare come segue:
( ) ( ) ( )2 k kk
t ,I I h q t kT , nT t n+1 Tφ π∞
=−∞= − ≤ ≤∑ (III.10.1)
dove
{ }kI I= è una sequenza di simboli M-ari, ±1, ± 2, … ±M-1,
{ }kh è una sequenza di coefficienti, detti indici di modulazione,
q(t) è una forma d’onda normalizzata e T è il periodo di simbolo.
In generale q(t) si può esprimere come
( ) ( )0
tq t g dτ τ= ∫ .
Se g(t) =0 ∀t>T, allora la tecnica CPM è detta a risposta totale (full response CPM),
altrimenti si parla di CPM a risposta parziale (partial response CPM).
30

Parte III – G. Reali: Modulazione numerica P
g(t)
t
q(t)
tT T
g(t)
t
q(t)
t2T 2T
full response CPM partial response CPM
Esempio: Continuous Phase FSK (CPFSK): la funzione g(t) è di tipo rettangolare con
indici di modulazione costanti.
g(t)
t
q(t)
tT
1/2T1/2
T
Diagramma dell’evoluzione temporale della fase
2T 3T 4T 5T0
0
hπ
2π
3hπ
4hπ
-hπ
-2π
-3hπ
- 4hπ
31

Parte III – G. Reali: Modulazione numerica P
III.11 MINIMUM SHIFT KEYING (MSK)
Il Minimum Shift Keying è un caso particolare di CPFSK, quindi di CPM, in cui gli indici
di modulazione h valgono 1/2. Utilizzando la (III.10.1), la fase della portante si può
esprimere come:
( ) ( ) ( )1
2 2
nn
k n nk
I t-nTt,I I + I q t nT = + , nT t n+1 TT
ππφ π ϑ−
=−∞
= − ≤ ≤
∑ (III.11.1)
Usando la (III.11.1), la portante modulata MSK assume la seguente forma:
( )
( )
22
24 2
nc n
n nc n
I t-nTx t A cos f t + =T
I n I=A cos f t- , nT t n+1 TT
ππ ϑ
ππ ϑ
= +
+ + ≤ ≤
(III.11.2)
Osservando la (III.11.2) si vede che l’MSK è un caso di CPFSK costruita utilizzando le
portanti
1
2
141
4
c
c
f fT
f fT
= −
= +
quindi con una deviazione di frequenza ∆f=1/2T, ossia la minima deviazione di frequenza
(da cui il nome Minimum Shift Keying).
La (III.11.2) si può esprimere anche come segue:
( ) ( ) ( )12 12
ii i n
nx t A cos f t + , i=1,2 nT t n+1 Tππ ϑ − = + − ≤ ≤
Si può dimostrare che l’MSK corrisponde a una particolare forma di OQPSK in cui gli
impulsi in cui gli impulsi rettangolari sono sostituiti da impulsi sinusoidali, ossia le forme
d’onda generate dal “generatore di livello” mostrato in Fig. III.8.1 sono di tipo sinusoidale:
22
0
sin t 0<t Tg( t ) T
altrove
π
<= (III.11.3)
Usando la (III.11.3), si può dimostrare che le componenti in fase e in quadratura
dell’inviluppo complesso, I(t) e Q(t), assumono la forma:
32
Parte III – G. Reali: Modulazione numerica P
[ ]
( )
2
2 1
2
2
kk
kk
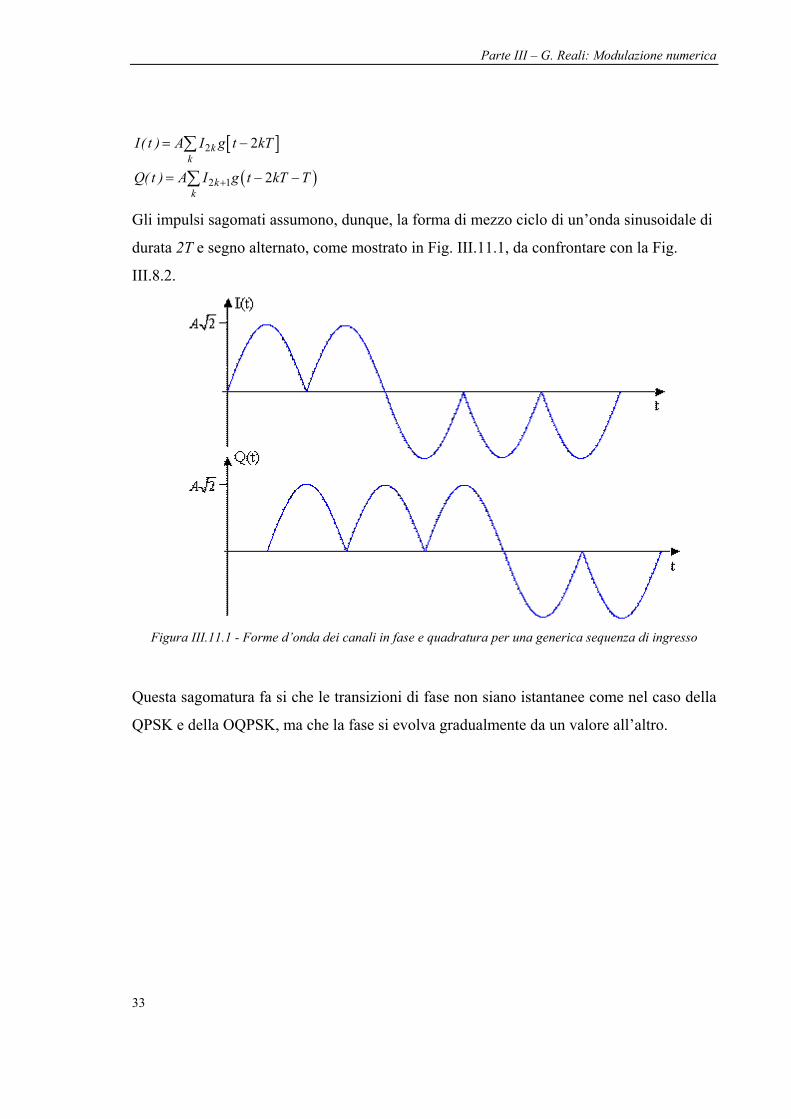
I( t ) A I g t kT
Q( t ) A I g t kT T+
= −
= −
∑
∑ −
Gli impulsi sagomati assumono, dunque, la forma di mezzo ciclo di un’onda sinusoidale di
durata 2T e segno alternato, come mostrato in Fig. III.11.1, da confrontare con la Fig.
III.8.2.
Figura III.11.1 - Forme d’onda dei canali in fase e quadratura per una generica sequenza di ingresso
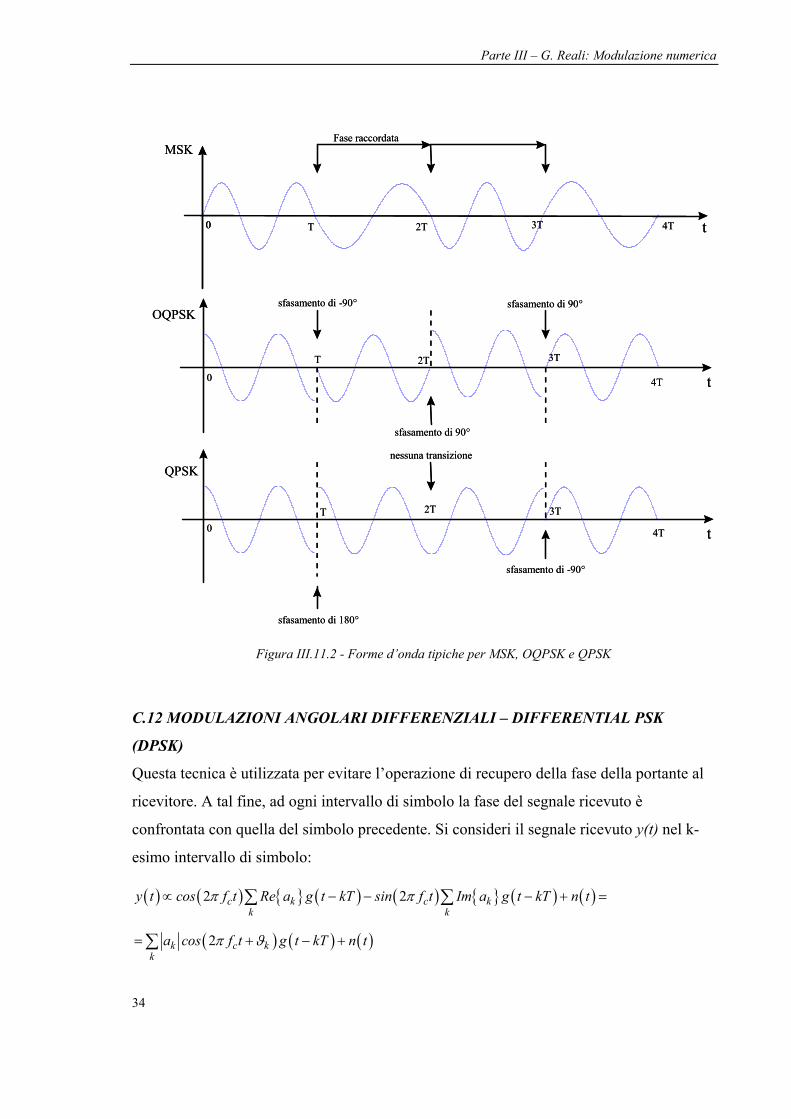
Questa sagomatura fa si che le transizioni di fase non siano istantanee come nel caso della
QPSK e della OQPSK, ma che la fase si evolva gradualmente da un valore all’altro.
33
Parte III – G. Reali: Modulazione numerica P
T 2T 4T3T
T
T 2T
2T
3T
3T
4T
4T
Fase raccordata
nessuna transizione
MSK
QPSK
OQPSK
t
t
t
0
0
0
sfasamento di -90° sfasamento di 90°
sfasamento di -90°
sfasamento di 180°
sfasamento di 90°
T 2T 4T3T
T
T 2T
2T
3T
3T
4T
4T
Fase raccordata
nessuna transizione
MSK
QPSK
OQPSK
t
t
t
00
0
0
sfasamento di -90° sfasamento di 90°
sfasamento di -90°
sfasamento di 180°
sfasamento di 90°
Figura III.11.2 - Forme d’onda tipiche per MSK, OQPSK e QPSK
C.12 MODULAZIONI ANGOLARI DIFFERENZIALI – DIFFERENTIAL PSK
(DPSK)
Questa tecnica è utilizzata per evitare l’operazione di recupero della fase della portante al
ricevitore. A tal fine, ad ogni intervallo di simbolo la fase del segnale ricevuto è
confrontata con quella del simbolo precedente. Si consideri il segnale ricevuto y(t) nel k-
esimo intervallo di simbolo:
( ) ( ) { } ( ) ( ) { } ( ) ( )
( ) ( ) ( )
2 2
2
c k c kk k
k c kk
y t cos f t Re a g t kT sin f t Im a g t kT n t
a cos f t g t kT n t
π π
π ϑ
∝ − − −
= + − +
∑ ∑
∑
+ =
34
Parte III – G. Reali: Modulazione numerica P
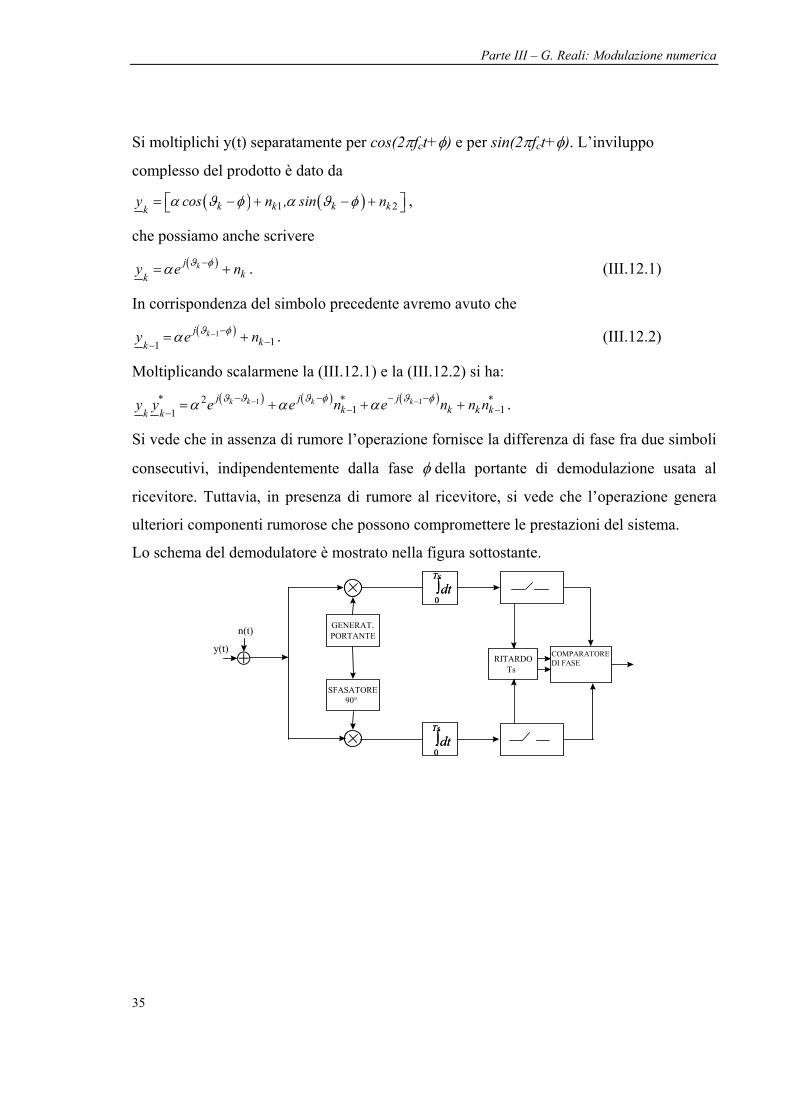
Si moltiplichi y(t) separatamente per cos(2πfct+φ) e per sin(2πfct+φ). L’inviluppo
complesso del prodotto è dato da
( ) ( )1 2k k k kky cos n , sin nα ϑ φ α ϑ φ = − + − + ,
che possiamo anche scrivere ( )kj
kky e ϑ φα −= n+ . (III.12.1)
In corrispondenza del simbolo precedente avremo avuto che ( )1
11kj
kky e nϑ φα − −
−−= + . (III.12.2)
Moltiplicando scalarmene la (III.12.1) e la (III.12.2) si ha: ( ) ( ) ( )1 12
1 11k k k kj j j* * *
k kk ky y e e n e n n nϑ ϑ ϑ φ ϑ φα α α− −− − − −
k k− −−= + + + .
Si vede che in assenza di rumore l’operazione fornisce la differenza di fase fra due simboli
consecutivi, indipendentemente dalla fase φ della portante di demodulazione usata al
ricevitore. Tuttavia, in presenza di rumore al ricevitore, si vede che l’operazione genera
ulteriori componenti rumorose che possono compromettere le prestazioni del sistema.
Lo schema del demodulatore è mostrato nella figura sottostante.
COMPARATOREDI FASE
GENERAT.PORTANTE
SFASATORE90°
dtTs
0∫dtTs
0∫
dtTs
0∫dtTs
0∫
⊕y(t)
n(t)
RITARDOTs
35

Parte III – G. Reali: Modulazione numerica P
APPENDICE A
A.1 Cenni sul segnale analitico e sull’inviluppo complesso.
Si consideri il seguente segnale modulato sia in ampiezza sia in fase:
[ ]2 cx( t ) A( t )cos f t ( t )π ϕ= + (A.1)
dove
• , il modulo o inviluppo di x(t), è il segnale che modula in ampiezza la
portante;
A( t )
• ( t )ϕ è la deviazione di fase di x(t) rispetto alla portante a frequenza fc , è il
segnale di modulazione di fase.
Si può associare al segnale x t( ) reale il segnale analitico:
2 cj t ( tfx( t ) A( t )ez π ϕ ) + = (A.2)
tale che
[ ]xx( t ) Re z ( t )=
e l’inviluppo complesso
(A.3) 2 cj f t j ( t )x x I Qz ( t ) z ( t )e A( t )e x ( t ) jx ( t )π ϕ−= = = +%
con
[ ][ ]
I
Q
x ( t ) A( t )cos ( t )
x ( t ) A( t )sen ( t )
ϕ
ϕ
=
=
La (A.3) rappresenta, nel piano complesso, un vettore (figura A.1) di ampiezza A(t)
variabile nel tempo e che ruota con pulsazione
2 d( t ) ft ( t )dt
ω π ϕ= =
a

Parte III – G. Reali: Modulazione numerica P
A(t1)
t2
t1
A(t2)
φ(t1)
φ(t2)
Figura A.1
Essendo inoltre :
[ ] 2 oj f tx xx( t ) Re z ( t ) Re z ( t )e π = = %
si può scrivere
( ) ( ) [ ]2 2 2I c Q c cx( t ) x ( t )cos f t x ( t )s i n f t A( t )cos f t ( t )π π π= − = ϕ+ (A.4)
dove
2 2I Q
Q
I
A( t ) x ( t ) x ( t )
x ( t )( t ) arctan
x ( t )ϕ
= +
=
La (A.3) (inviluppo complesso) è, dunque, una rappresentazione in bassa frequenza del
segnale che è centrato alla frequenza fxz ( t ) c . Quindi, note fc, xI(t) e xQ(t) si può
determinare in maniera univoca x(t) espresso dalla (A.1). In conclusione, si può dire che:
I Qx ( t ) jx ( t )+
è la rappresentazione in bassa frequenza del segnale considerato e che xI(t) e xQ(t) sono le
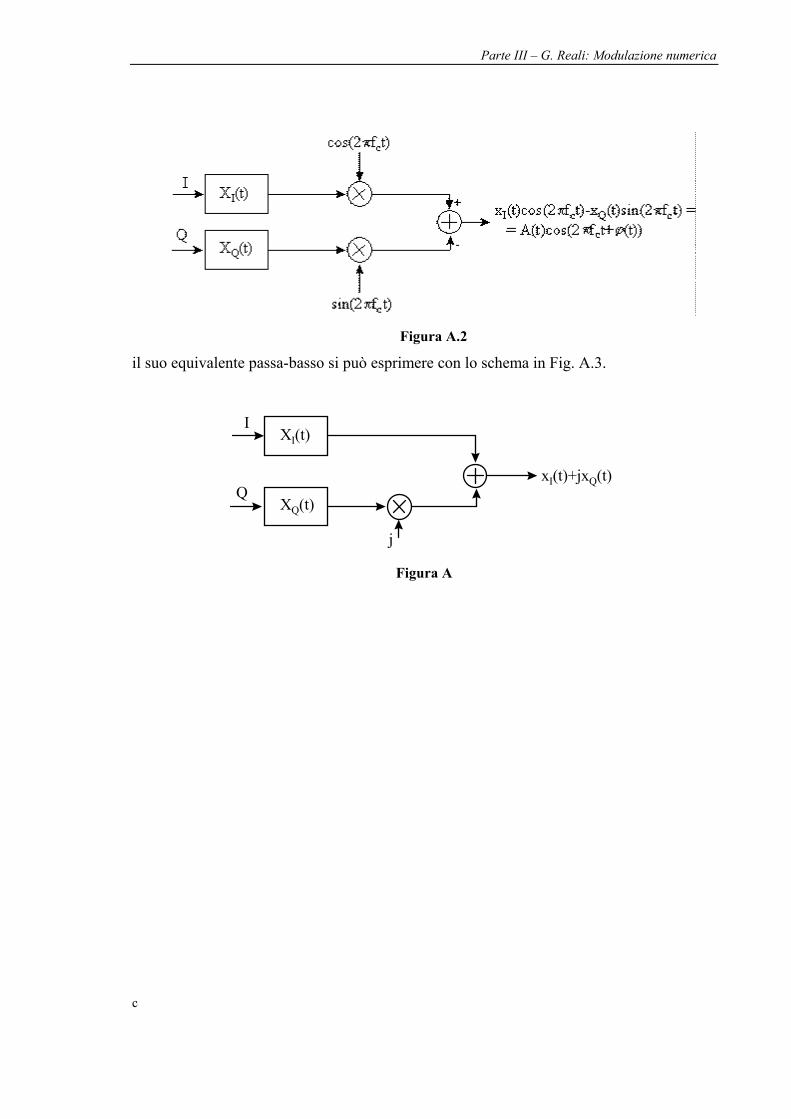
componenti analogiche di bassa frequenza. Pertanto, considerato lo schema in Fig.A.2,
b
Parte III – G. Reali: Modulazione numerica P
c
Figura A.2
il suo equivalente passa-basso si può esprimere con lo schema in Fig. A.3.
XI(t)
XQ(t)
j
xI(t)+jxQ(t)
I
Q
Figura A