Teoria Elasticita

of 10
-
Upload
marco-cotrino -
Category
Documents
-
view
215 -
download
0
Transcript of Teoria Elasticita
-
7/26/2019 Teoria Elasticita
1/10
G. Petrucci Lezioni di Costruzione di Macchine
3.1
3. IL PROBLEMA ELASTICOIl problema elastico consiste nella determinazione del campo tensionale, delle deformazioni e degli spostamenti diun solido costituito di materiale dal comportamento elastico lineare, vincolato su porzioni della superficie, soggettoa carichi esterni di volume Fx, Fy, Fze di superficiefx,fy,fz.
Propriet del materiale, incognite ed equazioniNellipotesi di materiale omogeneo, isotropo ed elastico lineare le propriet elastiche sono espresse mediante lecostanti ingegneristicheE(modulo di Young) e (coefficiente di Poisson), oppure mediante le costanti di LamGe
legate adE, e mediante le relazioni:
( )+12EG=
( ) ( )
1 1 2E
=+
(3.1,2)
G il noto modulo di elasticit tangenziale. Le relazioni inverse delle (1-2) sono le seguenti:
E GG
G=
+
+
3 2
( )G+=
2 (3.3,4)
In coordinate cartesiane le incognite del problema elastico sono 15 funzioni delle coordinate spaziali: le tensioni x(x,y,z), y(x,y,z), z(x,y,z), xy(x,y,z), yz(x,y,z), zx(x,y,z), le deformazioni x(x,y,z),y(x,y,z),z(x,y,z), xy(x,y,z),yz(x,y,z), zx(x,y,z), gli spostamenti u(x,y,z), v(x,y,z), w(x,y,z).
Le equazioni disponibili sono 15 suddivise in 3 gruppi:
le equazioni indefinite di equilibrio
0yxx zxxF
x y z
+ + + =
0xy y zy
yFx y z
+ + + =
0yzxz z
zFx y z
+ + + =
(3.5)
le equazioni di compatibilit (caso dei piccoli spostamenti)
x y z
u v w
x y z
= = =
xy yz zx
u v v w w u
y x z y x z
= + = + = +
(3.6)
le equazioni costitutive
( )1
x x y zE
= ( )1
y y x zE
= ( )1
z z y xE
=
xy xyG=
1 yz yzG
=1
1
zx zxG
= (3.7)
Le equazioni costitutive possono essere esplicitate rispetto alle tensioni:
( )
( ) ( )
1
1 1 2
x y z
x
E
+ +=
+
( )
( ) ( )
1
1 1 2
y x z
y
E
+ +=
+
( )
( ) ( )
1
1 1 2
z x y
z
E
+ +=
+
xy xyG =
yz yzG =
zx zxG = (3.7b)
Le prime 3 delle (7.b) possono essere riscritte utilizzando le costanti di Lam:
( )2x x y zG = + + + ( )2y y x zG = + + + ( )2z z x yG = + + + (3.7c)
Le equazioni di congruenza interna
2 22
2 2
y xyx
y x x y
+ =
2 22
2 2
y yzz
z y y z
+ =
2 22
2 2x xzz
x z x z
+ =
(3.8)
2
2 yz xyx zxy z x x y z
= + +
2
2 y yz xyzxz x y x y z
= +
2
2 yz xyzxzx y z x y z
= +
-
7/26/2019 Teoria Elasticita
2/10
G. Petrucci Lezioni di Costruzione di Macchine
3.2
Le equazioni di congruenza interna (8) mettono in relazione tra loro le componenti di deformazioneindipendentemente dalle funzioni spostamento e si ottengono dalle equazioni di compatibilit (6) eliminando,tramite operazioni di derivazione, gli spostamenti stessi. In particolare, derivando due volte la prima delle (6)rispetto aye la seconda rispetto ax e sommando si ottiene
22 3 3
2 2 2 2
yx u v
y x x y x y
+ = +
(3.9)
derivando la quarta una volta rispetto adxe una volta rispetto adysi ottiene
2 3 3
2 2
xy u v
x y x y x y
= +
(3.10)
i secondi membri delle (9) e (10) risultano uguali, di conseguenza lo sono i primi. Luguaglianza tra questi terminifornisce la prima delle (8); operando analogamente con le altre componenti si ottengono le altre equazioni dicongruenza. Le relazioni (8) esistono in quanto le 6 funzioni deformazione dipendono da 3 funzioni spostamento. Sele componenti di deformazione rispettano le equazioni di compatibilit interna, la congruit della deformazione garantita, cio non si verificano compenetrazioni o lacerazioni a causa della deformazione. Tale garanzia dicompatibilit dipende dal fatto che le (8) sono dedotte dalle (6).
Soluzione del problema elasticoIn generale nessuno dei sistemi di equazioni (5-8) pu essere risolto autonomamente, in quanto in ciascuno sonopresenti pi incognite che equazioni, tuttavia, effettuando alcune sostituzioni, possibile riscrivere le 3 equazioniindefinite di equilibrio (5) in funzione dei soli spostamenti u, v e w (le equazioni di Navier) o le 6 equazioni dicompatibilit (8) in funzione delle sole tensioni x, y, z, xy, yz, zx(le equazioni di Mitchell-Beltrami): nel primocaso si parla di formulazione agli spostamenti del problema elastico e nel secondo di formulazione alle tensioni.Tipicamente la formulazione agli spostamenti adatta alla soluzione del caso di solidi vincolati al contorno, mentrequella alle tensioni adatta al caso di solidi non vincolati, ma soggetti a carichi esterni in equilibrio tra loro (tuttavia facile trovare in bibliografia problemi del secondo tipo risolti con la formulazione agli spostamenti).
opportuno osservare che la linearit di tutte le equazioni che governano il problema consente di utilizzare lasovrapposizione degli effetti, grazie alla quale la risposta di un sistema soggetto ad una combinazione di azioniesterne pu essere ottenuta come somma delle risposte delle singole azioni. Inoltre risulta valido il principio diequivalenza elasticain base al quale le azioni delleffettiva distribuzione di forze agente su una porzione limitata di
superficie o volume del solido risultano equivalenti a quelle delle risultanti ad una distanza sufficientedalla zona diapplicazione stessa.
Il problema elastico pu essere notevolmente semplificato se la geometria dellelemento analizzato e i carichi cui sottoposto possono essere approssimati anche parzialmente a sistemi bidimensionali (come nel caso del problema
piano) o monodimensionali (come nel caso delle travi o dei sistemi assialsimmetrici). In questi casi, infatti, possibile ipotizzare che alcune delle funzioni incognite, tensioni, deformazioni e spostamenti, risultinoidenticamente nulle in tutto il campo e/o che siano funzioni di 1 o 2 variabili spaziali, invece che 3. In vari casi lasemplicit della geometria dellelemento analizzato (es. travi e piastre) consente di formulare delle ipotesisemplificative sullaformadelle funzioni che descrivono gli spostamenti.
Formulazione agli spostamenti - Equazioni di NavierLe equazioni di Navier sono le equazioni indefinite di equilibrio (5) scritte in funzione degli spostamenti. Questaformulazione indicata nei casi in cui, come condizioni al contorno, sono prefissati gli spostamenti. Per prima cosa
le equazioni costitutive (7c,b) vengono riscritte introducendo al posto delle deformazioni gli spostamenti dedottidalle equazioni di compatibilit (6), ottenendo, nel caso della xe della xy, espressioni del tipo
2x
u u v wG
x x y z
= + + +
xy
u vG
y x
= +
(3.11)
quindi, sostituendo le tensioni espresse con le (11) nelle equazioni di equilibrio (5) possibile riscrivere questeultime in termini di spostamento. Ad esempio in direzione xsi ottiene:
yxx zxxF
x y z
+ + + =
( )
2 2 2
2 2 2 x
u u u u v wG G F
x y z x x y z
+ + + + + + + =
(3.12)
( ) 2 3 0xG u G F x
= + + + =
Lespressione finale di tutte e tre le equazioni la seguente:
-
7/26/2019 Teoria Elasticita
3/10
G. Petrucci Lezioni di Costruzione di Macchine
3.3
2
30
1 2 xG u F
x
+ + =
2
30
1 2 yG v F
y
+ + =
2
30
1 2 zG w F
z
+ + =
(3.13a-c)nella quale loperatore di Laplace e la variazione di volume sono cos definiti:
( ) ( ) ( ) ( )2 2 2
22 2 2x y z
= + +
3 u v w
x y z
= + +
(3.14,15)
Condizioni al contorno relative alle tensioni possono essere espresse sostituendo le (7c,b) scritte in funzionedegli spostamenti (11), nelle equazioni di equilibrio al contorno (2.9). Ad esempio, nella direzione x, dovexnx+yxny+zxnz=fx, si ottiene:
2 3x y z x xu u v u w
G n n n n f x y x z x
+ + + + + =
(3.16)
Il problema ricondotto alla determinazione delle tre componenti di spostamento che soddisfano le equazioniprecedenti (13) pi le equazioni di congruenza al contorno (16).
Formulazione alle tensioni - Equazioni di Mitchell-Beltrami
Le equazioni di Mitchell-Beltrami sono le equazioni di compatibilit (8) scritte in funzione delle tensioni. Questaformulazione indicata nei casi in cui come condizioni al contorno sono prefissati i valori delle tensioni; un casotipico quello dei corpi privi di vincoli, soggetti a forze equilibrate, come i cilindri in pressione. Considerando laprima delle (8), sostituendo x, y, xycon x, y, xy, mediante le (7), eliminando il termine
2xy/xymediante leequazioni di equilibrio (5) opportunamente derivate e sommate, e trascurando le forze di volume, si ottiene:
( )2 2 2 2
2 2 2 2
10
1x x x
x y zx y z x
+ + + + + =
+ (3.17a)
Utilizzando tutte e 6 le equazioni di congruenza interna, introducendo loperatore di Laplace (14) e linvarianteprimo delle tensioni =x+y+z possibile ottenere tutte le equazioni di Mitchell-Beltrami:
2
2 2
1
01x x
+ =+
2
2 2
1
01y y
+ =+
2
2 2
1
01z z
+ =+
2
2
10
1xy x y
+ =
+
2
2
10
1xz x z
+ =
+
2
2
10
1yz y z
+ =
+ (3.17b)
che possono essere sintetizzate nella seguente espressione
2 ,
10
1ij kk ij
+ =
+ (3.17.c)
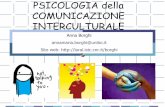
Problema pianoIl problema elastico definitopianose: il continuo(fig.1) di forma cilindricadi spessore h, con la sezione trasversale (di areaAe contorno C) disposta
parallelamente al pianoxy, le forze esterne Fdi volume ed fagenti sulla superficie Csono parallele al piano xyed indipendenti da z (cio
costanti lungoz), si ha cio F=[FxFy]T, f=[fxfy]
T, essendo Fz=0 edfz=0.
y
x
C
A
h
h/2h/2
yz
xC
f
s=ss=s
fxfy
z
f
F
y
y
x
xy
A
xf
Fig.3.1 Il continuo elastico nel caso piano e il sistema di riferimento.
-
7/26/2019 Teoria Elasticita
4/10
G. Petrucci Lezioni di Costruzione di Macchine
3.4
VariabiliAnche nel caso piano, in generale, tutte le componenti di tensione, deformazione e spostamento sono diverse da zeroe dipendenti da x, y e z, tuttavia le variabili x, y, xy, u, v possono essere identificate come primarie e ritenuteindipendenti dazper ipotesi semplificativa:
( )T
, x y xyx y = ( ) [ ],x y u v=s (3.18)
Equazioni disponibiliLe variabili primarie sono legate fra loro e alle condizioni meccaniche e cinematiche esterne dalle seguentiequazioni nel dominioAe sul contorno C:
le equazioni di equilibrio semplificate:
0yxxx
Fx y
+ + =
0xy y
yF
x y
+ + =
in A (3.19)
x x yx y xn n f + = xy x y y yn n f + = su C (3.20)
le equazioni di congruenza, in base alle quali si osserva che anche le variabili x, y, xysono indipendenti daz
x
u
x
=
y
v
y
=
xy
u v
y x
= +
, inA (3.21)
x xs s=
y ys s= su C (3.22)
le equazioni costitutive:
R= C= (3.23, 24)
R la matrice di rigidezza, di dimensioni matrice 3*3, simmetrica, definita positiva C la matrice di cedevolezza, inversa di R.
La forma definitiva delle equazioni costitutive dipende dalle ipotesi semplificative che possibile fare su zed z.
Ipotesi e semplificazioniAffinch le equazioni complete di equilibrio (5) siano rispettate deve verificarsi che
0zx zy = = ( ),z z x y = (3.25a,b)
La prima relazione discende dal fatto che, affinch le prime due equazioni di equilibrio (5) si possanotrasformare nelle (19), devono essere nulle le derivate di zxe zyrispetto az(quindi zxe zydevono essere costantirispetto az) e, dovendo essere nulle sulle superfici esterne, devono essere nulle ovunque. Essendo nulle le zxe zy,lultima delle (5), per lipotesi di forze di massa nulle in direzionez(Fz=0), mostra a sua volta che la derivata di zrispetto azdeve essere nulla e che, di conseguenza, la zrisulta dipendere solo daxedy.
Per lisotropia del materiale espressa dalle (7) e per la (25a), discende che:
0zx zy
= = (3.26)
In base alle (26) e allindipendenza da zdelle componenti di spostamento ue vsupposta con leq.18, le ultimedue equazioni di compatibilit (6) forniscono:
( )0; =w w
w w zx y
= =
(3.27a,b)
La (27a), infatti, implica che la w costante rispetto adxed ye quindi funzione della solaz. In base alle (27) sideduce che risulta possibile la presenza di una z=dw/dz diversa da 0, ma, poich le non dipendono da z perlipotesi (18) e per la (25b), z, per la terza delle (7), non vi pu dipendere. Allora deve essere:
=z
C w C z = (3.28,29)
Fisicamente le (28-29) affermano che tutti i punti della sezione che si trovano alla stessa quota zsi spostano indirezione verticale della stessa quantit e le sezioni parallele al piano xysi mantengono piane.
Le equazioni di congruenza interna (8) diventano:
2 22
2 2
y xyx
y x x y
+ =
2 2 2
2 2=0z z z
x y x y
= =
(3.30)
-
7/26/2019 Teoria Elasticita
5/10
G. Petrucci Lezioni di Costruzione di Macchine
3.5
Riguardo alle condizioni al contorno sulle sezioni estreme a z=h/2: le forze esterne in direzione xy devonoessere nulle, per la definizione di problema piano data allinizio del paragrafo,
20; z hx y
f f = = = (3.31)
mentre in direzionezsi pu ammettere lesistenza di una distribuzione di forze (forze esterne o reazioni vincolari)variabili conxedyautoequilibrate, cio agenti in direzione opposta sulle facce superiore ed inferiore:
2; z hz zf = = (3.32)Il legame elastico espresso dalle (7) o (23,24) aggiunge al problema piano descritto dalle (19-22) due incognite e
una sola equazione per cui il problema definito solo se il valore di zo di z determinabile in modo indipendentedal problema piano o ipotizzabile a priori. I casi pi importanti sono quelli nei quali si pu ipotizzarerispettivamente z=0 e z=0.
IpotesiVariabili principali indipendenti daz Equazioni di equilibrio semplificate Forze di massa nulle in direzionez
( )T
, x y xy
x y = 0yxx
xF
x y
+ + =
0zF =
( ) [ ],s x y u v= ( )T
, x y xyx y = 0xy y yFx y
+ + =
Tab.3.1 Variabili ed ipotesi semplificative del problema elastico piano.
Semplificazioni
Tensioni in direzioneznulle zcostante rispetto az Scorrimenti fuori dal pianoxynulli zcostantewcostante inxey,
lineare inz
0zx
= 0zy
= ( ),z z x y = 0zx = 0zy = z C = =w Cz Tab.3.2 Semplificazioni derivate dalle ipotesi semplificative nel problema elastico piano.
Ipotesi Equazione Semplificazione
0yxx xFx y
+ + =
0xy yy
Fx y
+ + =
0yxx zx xFx y z
+ + + =
0xy y zyy
Fx y z
+ + + =
0zxz
=
0zyz
=
0zx =
0zy
=
0=zF 0yzxz z
zF
x y z
+ + + =
0z
z
=
( ),z z x y =0zx zy = =
0zx zy = =
1zx zx
G =
1zy zy
G =
0zx =
0zy
=
( ) [ ],s x y u v= 0, 0v uz z
= =
zx w ux z
= +
yz
v w
z y
= +
0w w
x y
= =
( )=w w z
0== zyzx
( )T
, x y xy
x y = ( )1
z z y xE
= ( ),z z x y =
z C = ( ),z z x y =
( )=w w z zw
z
=
( )z z z =
z C =
zwz
=
=w Cz
Tab.3.3 Ipotesi, equazioni, passaggi e semplificazioni nel problema elastico piano.
-
7/26/2019 Teoria Elasticita
6/10
G. Petrucci Lezioni di Costruzione di Macchine
3.6
Le ipotesi e semplificazioni del problema piano sono riassunte nelle tab.1-3.Leq.(28) indica che, in base allimpostazione del problema elastico piano, le deformazioni zrisultano ovunque
costanti. Come gi detto, tale ipotesi implica la costanza degli spostamenti verticali rispetto ad x ed y (29), per laquale le sezioni parallele al piano xy, nonostante la deformazione, si mantengono piane, ovvero non presentanoingobbamenti. Effettivamente questa caratteristica osservata sperimentalmente negli elementi la cui geometria e ilsistema di carichi rispettano la definizione del problema piano, anche nel caso di elementi di grosso spessore neiquali eventuali deformazioni z integrate nello spessore darebbero luogo ad elevati spostamenti in corrispondenza
delle sezioni di estremit.Tenuto conto del fatto che, in generale, in base alla terza delle equazioni costitutive (7), le deformazioni zsonocausate direttamente dalle tensioni z e, tramite leffetto Poisson, dalla somma delle tensioni x+y, lipotesi (28)risulta verificata matematicamente nei seguenti casi:
1. se tutte le componenti di tensione sono costanti;2. se la tensione z compensa localmente le variazioni della somma x+y, come nel caso in cui esistono
vincoli sulle sezioni di estremit che impediscono gli spostamenti in direzione zproducendo forzefz(32), ocome accade nel caso dei cilindri di grosso spessore soggetti a variazione termica nello spessore;
3. se la tensione z nulla o costante e la somma x+y ovunque costante, come accade nel caso dei cilindriin pressione.
In pratica, se le tensioni sono tendenzialmente uniformi nel solido, si ricade nel caso 1, mentre, se le tensioni xey presentano elevati gradienti, si genera unazione mutua in direzione z per via delleffetto Poisson tra le zonesoggette alle tensioni pi basse, che tendono a rimanere indeformate, e quelle pi sollecitate; tale azione tende ad
uniformare le deformazioni verticali nel pianoxye riconduce la situazione meccanica a quella descritta nel caso 2.Le eq.(18) e (25) mostrano che le componenti di tensioni sono schematizzate come indipendenti da z, cio
x=x(x,y), y=y(x,y), z=z(x,y). Il caso di z(x,y) costante lungo z fisicamente realizzabile in presenza di forzeautoequilibrate agenti sulle sezioni estreme dellelemento come quelle descritte dalla (32), anche dovute a vincoliche impediscano gli spostamenti verticali, in quanto, in assenza di esse, la tensione z deve risultare nulla incorrispondenza delle facce di estremit per rispettare le equazioni di equilibrio al contorno. In assenza di tali forzelipotesi semplificativa ancora valida nel caso di tensioni zidenticamente nulle, ipotesi spesso accettabile nel casodi elementi di piccolo spessore, e nel caso teorico di elementi di spessore infinito. Sempre in assenza di forze deltipo (32), nel caso di elementi di spessore grande, ma finito, lipotesi di costanza della z rispetto a zpu essereconsiderata valida ad opportuna distanza dalle sezioni estreme, sfruttando il principio di equivalenza elastica.
Da notare che, nel caso degli elementi di piccolo spessore per i quali si accetta lipotesi di tensione zidenticamente nulla, lipotesi di z=Cpu essere rispettata esclusivamente se la somma x+y ovunque costante. In
ogni caso, per, la piccolezza dello spessore rende gli spostamenti verticali w trascurabili ovunque elapprossimazione accettabile.
Stato piano di deformazione e stato piano di tensioneUn caso particolare di problema elastico piano, generalmente identificato come stato di deformazione piano, quello nel quale le deformazioni e, di conseguenza, gli spostamenti in direzionezsono nulli:
z=0 w=0 (3.33)
Ovviamente questa condizione rispetta le (28-29). La formulazione corretta se vi sono vincoli nelle sezioniestreme che, esplicitando reazioni come in (32), impediscono gli spostamenti lungoz, da cui w=0. Si noti che spessosi definisce stato di deformazione piano anche il caso in cui la z costante rispetto adxed y, ipotesi che, secondoquanto espresso dalla (28), dovrebbe essere sempre verificata nei problemi piani. Spesso lipotesi di stato piano dideformazione utilizzabile nel caso di elementi di grosso spessore nei quali zone soggette a modeste tensioni nel
piano impediscono la deformazione in direzionezdovuta alleffetto Poisson delle zone soggette a tensioni maggiori.In base allipotesi z=0, le equazioni costitutive (7b) si semplificano dando luogo alle seguenti relazioni:
( )
( ) ( )
1
1 1 2x y
x
E
+ =
+
( )
( ) ( )
1
1 1 2x y
y
E
+ =
+
( )2 1xy xy
E
=
+ (3.34a-c)
In particolare, la posizione z=0 nella terza delle (7b) fornisce unequazione indipendente relativa alle tensioni zgenerate dalleffetto Poisson:
( )( ) ( )
( )=1 1 2
x y
z x y
E
+= +
+ (3.35)
Il termine di destra della (35) pu essere ricavato facilmente sommando le (34a,b). Sostituendo la (35) nelle (7)si ottengono anche le equazioni costitutive deformazioni-tensioni per lo stato di deformazione piano. In base alle(23-24), le matrici di rigidezza e cedevolezza Re Cassumono la seguente forma:
-
7/26/2019 Teoria Elasticita
7/10
G. Petrucci Lezioni di Costruzione di Macchine
3.7
( ) ( )
( )
1 0
1 01 1 2
0 0 1 2 2
E
= +
R
1 01
1 0
0 0 2E
+
=
C (3.36)
Le soluzioni ottenute risultano indipendenti da z; si noti che per z=0, cio nella sezione di simmetria, w=0comunque. Nel caso di solido di spessore infinitamente lungo, ogni sezione pu considerarsi di simmetria e la
condizione w=0 risulta rispettata ovunque.Altro caso particolare di problema elastico piano, generalmente identificato come stato di tensionepiano,
quello nel quale anche le tensioni zrisultano nulle, cio:
0z xz yz = = = (3.37)
Lipotesi di stato piano di tensione approssima bene il comportamento di elementi sottili caricate nel loro piano,essendo le forze (32) identicamente nulle. In questo caso, infatti, la condizione z=yz=zx=0 perz=h/2 pu essereestesa a tutto lo spessore, vista la sua piccolezza.
In base allipotesi z=0, le equazioni costitutive (7) si semplificano dando luogo alle seguenti relazioni:
( )1
x x yE
= ( )1
y x yE
= + ( )2 1+
xy xyE
= (3.38a-c)
In particolare, la posizione z=0 nella terza delle (7) fornisce unequazione indipendente relativa alledeformazioni zprodotte dalleffetto Poisson:
( )z x yE
= + ( )
1 x y
= +
(3.39)
Il termine di destra della (39) pu essere ricavato facilmente sommando le (38a,b). Sostituendo la (39) nelle (7b)si ottengono anche le equazioni costitutive tensioni-deformazioni per lo stato di tensione piano. In base alle (23-24),le matrici di rigidezza e cedevolezza Re Cassumono la seguente forma:
( )2
1 0
1 01 0 0 1 2
E
=
R
( )
1 01
1 0
0 0 2 1E
=
+
C (3.40)
In generale lespressione di z(39), non verifica la condizione espressa dalla (28), cio z=C. Lipotesi di stato ditensione piano fornisce una soluzione approssimata che soddisfa lequilibro, ma non la congruenza. In realt si puavere z=yz=zx=0 solo sulle superfici esterne del solido scariche, cio per z=h/2, e i valori effettivi lungo zvengono trascurati. In questa ipotesi si trascurano anche le variazioni lungo z delle altre componenti di tensioneconsiderandone il valore medio.
In tab.4 sono riportate le forme complete assunte dalle equazioni costitutive nei due casi.
Stato di deformazione piano z=0 Stato di tensione piano z=0
( ) ( )( ) ( )=
1 1 2z x y x yE
= + +
+ ( )z x y
E = + ( )
1 x y
= +
( )1
1x x yE
+ =
( )
( ) ( )
1
1 1 2x y
x
E
+ =
+ ( )1x x yE =
( )21
x y
x
E
+=
( )1
1y y xE
+ =
( )
( ) ( )
1
1 1 2y x
y
E
+ =
+ ( )1y y xE =
( )21
y x
y
E
+=
1xy xyG
= xy xyG = 1
xy xyG = xy xyG =
Tab3.4 Le equazioni costitutive nei casi di stato di deformazione piano e stato di tensione piano.
-
7/26/2019 Teoria Elasticita
8/10
G. Petrucci Lezioni di Costruzione di Macchine
3.8
Soluzione del problema piano nelle tensioniLe formulazioni relative a stato piano di deformazione e di tensione si basano sulle stesse equazioni di equilibrio edi congruenza, mentre le equazioni costitutive (34,35) e (39a-d) differiscono per i due casi.
Nel caso della formulazione alle tensioni, osservando che le tensioni incognite sono tre e che sono gi disponibilile due equazioni di equilibrio (19), si pu pensare di ottenere una terza equazione nelle tensioni utilizzandolequazione di congruenza interna (30). In particolare, possibile sostituire le deformazioni presenti nella (30) con letensioni ottenute dalle equazioni costitutive (34,35) e (38a-c) per i due casi del problema piano.
Per stato di deformazione piano si ottiene:
( ) ( )
2 22 22
2 2 2 22
x y x yy xyx
x y x y x y
+ + + + =
(3.41)
Sommando ad ambo i membri la quantit
22
2 2
yx
x y
+
(3.42)
la relazione diviene:
( )
2 22
2 2 2
121
y xyxx y
x y x y
+ = + +
(3.43)
Operando analogamente, per stato di tensione piano invece si ottiene
( ) ( )2 22
2 2 21 2y xyx
x yx y x y
+ = + + +
(3.44)
Le due relazioni differiscono solo per le costanti presenti nei termini a destra, legati al coefficiente di Poisson .Derivando le equazioni di equilibrio (19) rispettivamente rispetto adxedye sommando si ottiene:
2 22
2 2
2y xy yx x FF
x y x y x y
+ + = +
(3.45)
Sostituendo la parte a destra della (45) nelle (43) e (44) si ottiene:
( )2yx
x y
FFk
x y
+ = +
(3.46)
con knei due casi dato da:
1
1k
=
1k = + (3.47,48)
Nel caso di forze di volume nulle o costanti il secondo membro della (46) si annulla e la soluzione identica inentrambi i casi.
Come detto, si pu parlare di problema piano governato dalle equazioni di equilibrio, dallequazione dicongruenza di Mitchell-Beltrami e dalle equazioni di equilibrio al contorno. Nel caso di forze di volume nulle ocostanti si ha:
0yxxx y
+ =
0xy y
x y
+ =
, (3.49)
( )2 0x y + = (3.50)
x x yx y xn n f+ = xy x y y yn n f+ = (3.51)
Le componenti trasversali ze zsaranno differenti per i due casi e date dalle eq.(33) e (35) per deformazione
piana e (38) e (39d) per tensione piana.
-
7/26/2019 Teoria Elasticita
9/10
G. Petrucci Lezioni di Costruzione di Macchine
3.9
La funzione di Airy
Introducendo una funzione (x,y) dettafunzione di sforzoofunzione di Airy, tale che
2 2 2
2 2, ,
x y xy x yF y F x
y x y x
= = =
(3.52)
La (50) si trasforma in
4 0 = (3.53)
essendo loperatore doppio di Laplace cos definito:
( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 2 2 2 4 4 4
4 2 2 2 2 2 2 4 2 2 42
x y x y x x y y
= = + + = + +
(3.54)
Una funzione (x,y) che soddisfi la (53) detta biarmonica. La soluzione del problema elastico pu esserericondotto alla determinazione della particolare funzione di Airy che soddisfa le condizioni al contorno del casoanalizzato.
Tipici esempi di funzioni biarmoniche sono tutti i polinomi di grado inferiore al 4, ad esempio i seguenti
( ) 2 22 1 2 3,x y a x a xy a y = + + 3 1 22 , 2 ,x y xya a a = = = (3.55a-d)
( ) 3 2 2 33 1 2 3 4,x y b x b x y b xy b y = + + + ( )3 4 1 2 2 32 6 , 6 2 , 2x y xyb y b y b x b y b x b y = + = + = + (3.56a-d)
compresi tutti quelli ottenibili da essi ponendo a 0 una o pi costanti.Diversi polinomi di grado superiore sono funzioni biarmoniche, come, ad esempio, il seguente
( ) ( )4 3 2 2 3 44 1 2 1 5 4 5, 3x y c x c x y c c x y c xy c y = + + + + (3.57)
nel quale il coefficiente c3 deve essere posto come c3=c1+c5, come si vede nella (57), affinch la (53) risultiverificata.
Tensioni termicheUna variazione di temperatura provoca nei solidi elastici isotropi delle deformazioni in quanto ogni elementino dimateriale tende ad espandersi in tutte le direzioni in misura proporzionale alla variazione di temperatura, secondo laclassica relazione x,y,z=(TT0)=T, considerando T=T(x,y) funzione delle variabilixedy.
In presenza di variazioni di temperatura le prime tre equazioni costitutive (7) e le (39a,b,d) del caso di statopiano di tensione devono essere modificate sommando il termine T
( ) 1
x x y z T
E = + ( )
1y y x z
TE
= + ( ) 1
z z y x T
E = +
(3.58)
( ) 1
x x y T
E = + ( )
1y y x
TE
= + ( ) z x y TE
= + + (3.59)
Anche la tensione in direzione z del caso di stato di deformazione piano (35) deve essere modificata perincludere leffetto della deformazione termica impedita
( ) ( )( ) ( ) =
1 1 2z x y x yE
E T
= + + +
(3.60)
Infine lequazione di congruenza (50) si modifica in
( ) 2 2x y E T + = (3.61)
La (61) mostra che se il corpo libero da vincoli o vincolato in modo isostatico, una variazione uniforme ditemperatura (T=cost) o una variazione tale da creare un gradiente di temperatura lineare (T=c1x + c2y) non
danno luogo ad uno stato tensionale. Infatti, in tal caso, il termine a destra della (61) si annulla.
-
7/26/2019 Teoria Elasticita
10/10
G. Petrucci Lezioni di Costruzione di Macchine
3.10
EQUAZIONI DEL PROBLEMA ELASTICOModulo di elasticit trasversale - Costanti di Lam (G e )
( )
( )
( )21
2 1 2 1
EEG
= =
+
( ) ( )1 1 2E
=
+ E G
G
G=
+
+
3 2
( )G+=
2
Equazioni indefinite di equilibrio
0yxx zx
xFx y z
+ + + = 0xy y zy
yFx y z
+ + + = 0yzxz z
zFx y z
+ + + =
Equazioni di compatibilit
x
u
x
=
y
v
y
=
z
w
z
=
xy
u v
y x
= +
yz
v w
z y
= +
zx
w u
x z
= +
Equazioni di congruenza interna
2 22
2 2
y xyx
y x x y
+ =
2 22
2 2
y yzz
z y y z
+ =
2 22
2 2x xzz
x z x z
+ =
2
2 yz xyx zxy z x x y z
= + +
2
2 y yz xyzxz x y x y z
= +
2
2 yz xyz zxx y z x y z
= +
Dilatazione cubica Deformazione termica
1 2 3V x y zdV V = = + + = + + ( )0 x y z T T T = = = =
Lavoro di deformazione ad unit di volume
Tl
21= = ( )12 x x y y z z xy xy xz xz yz yz + + + + + =
= ( ) ( )1 12 2 2 2 2 22 22x y z x y y z z x xy yz xzE G + + + + + + + T
l21= = ( )3322112
1 ++ = ( )1 2 2 21 2 3 1 2 1 3 2 32 2E + + + +
Equazioni costitutive deformazioni -tensioni
( )1
x x y zE =
( )1
y y x zE =
( )1
z z y xE =
1
xy xyG =
1
yz yzG =
1
zx zxG =
Equazioni costitutive tensioni-deformazioni
( )
( ) ( )
1
1 1 2x y z
x
E
+ + =
+
( )
( ) ( )
1
1 1 2y x z
y
E
+ + =
+
( )
( ) ( )
1
1 1 2z x y
z
E
+ + =
+
xy xyG = yz yzG = zx zxG = Equazioni costitutive tensioni-deformazioni espresse mediante le costanti di Lam
( )2x x y zG = + + + ( )2y y x zG = + + + ( )2z z x yG = + + +
xy xyG = yz yzG = zx zxG =
Stato di deformazione piano z=0 Stato di tensione piano 0z xz yz = = =
( ) ( )( ) ( )=
1 1 2z x y x yE
= + ++
( )z x yE
= + ( )
1 x y
= +
Equazioni costitutive Equazioni costitutive
( )1
1x x yE
+ =
( )
( ) ( )
1
1 1 2x y
x
E
+ =
+ ( )1x x yE =
( )21
x y
x
E
+=
( )1
1y y xE
+ =
( )
( ) ( )
1
1 1 2
y x
y
E
+ =
+
( )1y y xE
= ( )21
y x
y
E
+=
1xy xyG
= xy xyG = 1
xy xyG = xy xyG =