
Quantit a di moto prima e dopo l’urto - o il fenomeno impulsivo,...
41
Urti Corpo rigido Urto tra corpi I fenomeni di urto tra corpi sono difficilmente modellizzabili e descrivibili in termini di equazioni del moto, perch` e le forze che agiscono sui corpi nell’urto sono impulsive e non note. Una descrizione dei fenomeni di urto pu` o essere invece molto semplificata dall’applicazione dei concetti di: Quantit` a di moto prima e dopo l’urto - o il fenomeno impulsivo, qualunque esso sia; Invarianza della quantit` a di moto in assenza di forze esterne - impulsive, eventualmente - durante l’urto, e consequentemente: Invarianza del moto del centro di massa del sistema anche in presenza di urti tra corpi che compongono il sistema, in quanto dinamiche provocate da forze interne 1 / 41
Transcript of Quantit a di moto prima e dopo l’urto - o il fenomeno impulsivo,...

Urti
Corporigido
Urto tra corpi
I fenomeni di urto tra corpi sono difficilmente modellizzabili edescrivibili in termini di equazioni del moto, perche le forze cheagiscono sui corpi nell’urto sono impulsive e non note.
Una descrizione dei fenomeni di urto puo essere invece moltosemplificata dall’applicazione dei concetti di:
Quantita di moto prima e dopo l’urto - o il fenomeno impulsivo,qualunque esso sia;
Invarianza della quantita di moto in assenza di forze esterne -impulsive, eventualmente - durante l’urto, e consequentemente:
Invarianza del moto del centro di massa del sistema anche inpresenza di urti tra corpi che compongono il sistema, in quantodinamiche provocate da forze interne
1 / 41

Urti
Corporigido
Urto tra due corpi
Due corpi di massa m1 e m2 collidono con velocita, primadell’urto, pari a v1 e v2, collineari. Assumiamo che durante l’urtosul sistema formato dai due corpi non agiscono forze esterneimpulsive. Quindi possiamo affermare che:
La quantita di moto totale si conserva
il moto del centro di massa del sistema e invariato prima edopo l’urto.
Le grandezze incognite nel dopo urto sono le due velocita finalidei corpi, ed abbiamo a disposizione un principio di conservazione(quello della quantita di moto totale), per cui possiamo solodeterminare una delle due velocita in funzione dell’altra:
vCM =1
m1 +m2(m1v1 +m2v2) =
1
m1 +m2(m1v1f +m2v2f )
∆Pcm = 0 = ∆P2 + ∆P1 → v2f = v2 −m1
m2(v1f − v1)
2 / 41

Urti
Corporigido
Secondo teorema di Koenig
A seguito dell’urto possiamo avere una variazione di energiacinetica, perche in generale non e detto che le forze agentinell’urto non compiano lavoro.
L’energia cinetica del sistema e la somma di tutte le energiecinetiche dei suoi componenti. Visto che abbiamo fin’ora trattatocorpi estesi come corpi puntiformi anche per quel che riguardal’energia cinetica e ragionevole pensare che sia possibile associareal moto del centro di massa un’energia cinetica.
3 / 41

Urti
Corporigido
Secondo teorema di Koenig
Consideriamo un sistema con n corpi di massa mi e velocita vi.Se introduciamo la velocita v′
i per ognuno dei corpi come lavelocita che hanno nel sistema di riferimento in moto con lavelocita del centro di massa abbiamo la relazione: vi = vcm +v′
i.Con queste grandezze costruiamo l’energia cinetica:
Ec =∑i
1
2miv
2i =
∑i
1
2mi(vcm + v′
i)2
∑i
1
2mi(vcm + v′
i)2 =
1
2vcm
2∑i
mi +∑i
1
2mi(v
′i)
2 +
+ vCM ·∑i
miv′i =
=1
2Mtotv
2cm + E′c + vCM ·
∑i
miv′i
4 / 41

Urti
Corporigido
Secondo teorema di Koenig
Consideriamo un sistema con n corpi di massa mi e velocita vi.Se introduciamo la velocita v′
i per ognuno dei corpi come lavelocita che hanno nel sistema di riferimento in moto con lavelocita del centro di massa abbiamo la relazione: vi = vcm +v′
i.Con queste grandezze costruiamo l’energia cinetica:
Ec =∑i
1
2miv
2i =
∑i
1
2mi(vcm + v′
i)2
∑i
1
2mi(vcm + v′
i)2 =
1
2vcm
2∑i
mi +∑i
1
2mi(v
′i)
2 +
+ vCM ·∑i
miv′i =
=1
2Mtotv
2cm + E′c + vCM ·
∑i
miv′i
5 / 41

Urti
Corporigido
Secondo teorema di Koenig
Consideriamo un sistema con n corpi di massa mi e velocita vi.Se introduciamo la velocita v′
i per ognuno dei corpi come lavelocita che hanno nel sistema di riferimento in moto con lavelocita del centro di massa abbiamo la relazione: vi = vcm +v′
i.Con queste grandezze costruiamo l’energia cinetica:
Ec =∑i
1
2miv
2i =
∑i
1
2mi(vcm + v′
i)2
∑i
1
2mi(vcm + v′
i)2 =
1
2vcm
2∑i
mi +∑i
1
2mi(v
′i)
2 +
+ vCM ·∑i
miv′i =
=1
2Mtotv
2cm + E′c + vCM ·
∑i
miv′i
6 / 41

Urti
Corporigido
Secondo teorema di Koenig
Ec =1
2Mtotv
2cm + E′
c + vCM ·∑i
miv′i =
1
2Mtotv
2cm + E′
c
”L’energia cinetica puo essere scomposta in energia cineticacalcolata nel sistema solidale al centro di massa piu l’energiacinetica associata al moto del centro di massa”
La grandezza∑
imiv′i e nulla. Infatti:∑
i
mivi =∑i
mivcm +∑i
miv′i
Ptot = Pcm +∑i
miv′i
Ptot = Pcm →∑i
miv′i = 0
”Nel sistema del centro di massa la quantita di moto totale enulla”7 / 41

Urti
Corporigido
Secondo teorema di Koenig
Ec =1
2Mtotv
2cm + E′
c + vCM ·∑i
miv′i =
1
2Mtotv
2cm + E′
c
”L’energia cinetica puo essere scomposta in energia cineticacalcolata nel sistema solidale al centro di massa piu l’energiacinetica associata al moto del centro di massa”
La grandezza∑
imiv′i e nulla. Infatti:∑
i
mivi =∑i
mivcm +∑i
miv′i
Ptot = Pcm +∑i
miv′i
Ptot = Pcm →∑i
miv′i = 0
”Nel sistema del centro di massa la quantita di moto totale enulla”8 / 41

Urti
Corporigido
Secondo teorema di Koenig
Ec =1
2Mtotv
2cm + E′
c + vCM ·∑i
miv′i =
1
2Mtotv
2cm + E′
c
”L’energia cinetica puo essere scomposta in energia cineticacalcolata nel sistema solidale al centro di massa piu l’energiacinetica associata al moto del centro di massa”
La grandezza∑
imiv′i e nulla. Infatti:∑
i
mivi =∑i
mivcm +∑i
miv′i
Ptot = Pcm +∑i
miv′i
Ptot = Pcm →∑i
miv′i = 0
”Nel sistema del centro di massa la quantita di moto totale enulla”9 / 41

Urti
Corporigido
Secondo teorema di Koenig
Ec =1
2Mtotv
2cm + E′
c + vCM ·∑i
miv′i =
1
2Mtotv
2cm + E′
c
”L’energia cinetica puo essere scomposta in energia cineticacalcolata nel sistema solidale al centro di massa piu l’energiacinetica associata al moto del centro di massa”
La grandezza∑
imiv′i e nulla. Infatti:∑
i
mivi =∑i
mivcm +∑i
miv′i
Ptot = Pcm +∑i
miv′i
Ptot = Pcm →∑i
miv′i = 0
”Nel sistema del centro di massa la quantita di moto totale enulla”10 / 41

Urti
Corporigido
Secondo teorema di Koenig
Ec =1
2Mtotv
2cm + E′
c + vCM ·∑i
miv′i =
1
2Mtotv
2cm + E′
c
”L’energia cinetica puo essere scomposta in energia cineticacalcolata nel sistema solidale al centro di massa piu l’energiacinetica associata al moto del centro di massa”
La grandezza∑
imiv′i e nulla. Infatti:∑
i
mivi =∑i
mivcm +∑i
miv′i
Ptot = Pcm +∑i
miv′i
Ptot = Pcm →∑i
miv′i = 0
”Nel sistema del centro di massa la quantita di moto totale enulla”11 / 41

Urti
Corporigido
Urto tra due corpi
Possiamo comprendere meglio cosa succede in un urto se usiamol’informazione che il moto del centro di massa e cosı purel’energia cinetica associata al centro di massa sono invariati dopol’urto.
∆Ec = ∆(1
2Mtotv
2cm) + ∆E′
c = ∆E′c
Calcoliamo dunque la variazione dell’energia cinetica ponendocinel sistema del centro di massa (SCM):
P ′f = P ′
i = 0→ v′2f = − m1
m2v′1f e analogamente v′2i = − m1
m2v′1i
∆E′c =
1
2m1(v′1f )2 +
1
2m2(v′2f )2 − 1
2m1(v′1i)
2 − 1
2m1(v′2i)
2 =
=1
2m1(1 +
m22
m21
)((v′1f )2 − (v′1i)2) =
=1
2m1(1 +
m22
m21
)((v1f − vcm)2 − (v1i − vcm)2) = ∆Ec
12 / 41

Urti
Corporigido
Urto tra due corpi
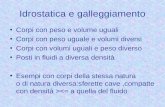
Nei grafici sono mostrate, in funzione della velocita finale delcorpo ”uno” nel sistema del laboratorio (SL), la velocita delcorpo ”due” nel SL e la variazione di energia cinetica del sistemasempre nel SL, per m1 = 1 kg, v1 = 1 m/s, m2 = 2 kg,v2 = −2 m/s.
−6 −4 −2 0 2 4 6
−4
−2
0
v1f
v 2f
−6 −4 −2 0 2 4 6
0
20
40
60
80
v1f
∆E
c
13 / 41

Urti
Corporigido
Urto tra due corpi
Nei grafici sono mostrate, in funzione della velocita finale delcorpo ”uno” nel sistema del laboratorio (SL), la velocita delcorpo ”due” nel SL e la variazione di energia cinetica del sistemasempre nel SL, per m1 = 1 kg, v1 = 1 m/s, m2 = 2 kg,v2 = −2 m/s.
−6 −4 −2 0 2 4 6
−4
−2
0
v1f
v 2f
−6 −4 −2 0 2 4 6
0
20
40
60
80
v1f
∆E
c
14 / 41

Urti
Corporigido
Urto tra due corpi
Nei grafici sono mostrate, in funzione della velocita finale delcorpo ”uno” nel sistema del laboratorio (SL), la velocita delcorpo ”due” nel SL e la variazione di energia cinetica del sistemasempre nel SL, per m1 = 1 kg, v1 = 1 m/s, m2 = 2 kg,v2 = −2 m/s.
−6 −4 −2 0 2 4 6
−4
−2
0
v1f
v 2f
−6 −4 −2 0 2 4 6
0
20
40
60
80
v1f
∆E
c
15 / 41

Urti
Corporigido
Urto tra due corpi
Nei grafici sono mostrate, in funzione della velocita finale delcorpo ”uno” nel sistema del laboratorio (SL), la velocita delcorpo ”due” nel SL e la variazione di energia cinetica del sistemasempre nel SL, per m1 = 1 kg, v1 = 1 m/s, m2 = 2 kg,v2 = −2 m/s.
−6 −4 −2 0 2 4 6
−4
−2
0
v1f
v 2f
−6 −4 −2 0 2 4 6
0
20
40
60
80
v1f
∆E
c
16 / 41

Urti
Corporigido
Urto tra due corpi completamente anaelastico edelastico
La variazione in negativo massima dell’energia cineticacorrisponde ai corpi fermi nel SCM, quindi corpi con la stessavelocita - quella del centro di massa - nel SL. In queste condizionisi parla di urto completamente anaelastico.
Nel caso invece di ∆Ec = 0 parliamo di urto elastico. Nel SCMquesto avviene in due casi:
v′f = v′i, ovvero niente urto.
v′f = −v′i.
17 / 41

Urti
Corporigido
Urto tra due corpi completamente anaelastico edelastico
Visto che per un urto elastico sappiamo la velocita nel SCM,trovare le corrispondenti velocita nel SL e semplice:
vCM =1
m1 +m2(m1v1 +m2v2)
1v′i = v1 − vCM = v1 −
1
m1 +m2(m1v1 +m2v2)
1v′f = −1v
′i = vCM − v1
1vf =1 v′f + vCM = 2vCM − v1 = 2
m2
m1 +m2v2 +
m1 −m2
m1 +m2v1
2vf = 2vCM − v2 = 2m1
m1 +m2v1 +
m2 −m1
m1 +m2v2
18 / 41

Urti
Corporigido
Corpo rigido
Un corpo viene definito rigido se per ogni coppia di punti si mantieneinvariata la distanza.
Se consideriamo un corpo rigido e lo spostiamo nello spazio e facilerendersi conto che il moto e caratterizzabile come spostamento del CMe rotazione degli assi che formano il SCM.
19 / 41

Urti
Corporigido
Si puo dimostrare che in generale per descrivere la posizione nellospazio di un corpo rigido sono necessari sei parametri: laposizione del centro di massa (tre parametri) e l’orientamentodegli assi (tre angoli - detti ”di Eulero”). Quindi un corpo rigidonon e equivalente ad un punto materiale, la cui posizione edescritta da tre parametri.
Noi per lo piu analizzeremo moti in cui la posizione del centro dimassa e la rotazione intorno ad un asse fisso nel SL sarannosufficienti per descrivere il moto. In questi moti due parametriche servono ad identificare l’orientamento dell’asse di rotazione -”latitudine e longitudine” sono fissi, e quindi solo quattroparametri descrivono completamente il moto.
20 / 41

Urti
Corporigido
Moto con asse fisso
Prendiamo un corpo rigido in rotazione con una certa velocita angolareω(t) attorno ad un asse fisso e mettiamoci nel SCM, con un asse - disolito z - orientato lungo l’asse di rotazione, con la convenzione che ilverso sia quello dato dalla ”regola della vite”...
Ogni particella mi del corpo ha una posizione ri(t) e una velocita vi(t);la rigidita del corpo e la fissita dell’asse di rotazione implicano che ilmoto e circolare, di raggio Ri, con velocita di modulo v(t) = ω(t)Ri.
vP = |R|ω
21 / 41

Urti
Corporigido
Energia cinetica
Per trovare l’energia cinetica di un corpo in rotazione attorno adun asse fisso, per esempio z, basta sommare le energie cinetichedi tutti i suoi componenti:
Ec(t) =∑i
1
2miv
2i (t) =
∑i
1
2miω
2(t)r2i =
=1
2ω2(t)
∑i
mir2i
La grandezza I =∑
imir2i =
∫V dmr2, con r distanza tra un
punto del volume del corpo e l’asse di rotazione si chiama”Momento d’inerzia rispetto all’asse di rotazione”. E unacaratteristica geometrica del corpo. Si parla SEMPRE dimomento d’inerzia rispetto ad un asse.
22 / 41

Urti
Corporigido
Momento d’inerzia
A titolo di esempio calcoliamo il momento d’inerzia di un astasottile rispetto ad un asse passante per il suo centro.
dm = dxρ =M
Ldx
I =
∫dmr2 =
M
L
∫ L/2
−L/2
dxx2 =
=M
L((L/2)3
3− (−L/2)3
3) =
1
12ML2
23 / 41

Urti
Corporigido
Momento d’inerzia
A titolo di esempio calcoliamo il momento d’inerzia di un astasottile rispetto ad un asse passante per il suo centro.
dm = dxρ =M
Ldx
I =
∫dmr2 =
M
L
∫ L/2
−L/2
dxx2 =
=M
L((L/2)3
3− (−L/2)3
3) =
1
12ML2
24 / 41

Urti
Corporigido
Momento d’inerzia
A titolo di esempio calcoliamo il momento d’inerzia di un astasottile rispetto ad un asse passante per il suo centro.
dm = dxρ =M
Ldx
I =
∫dmr2 =
M
L
∫ L/2
−L/2
dxx2 =
=M
L((L/2)3
3− (−L/2)3
3) =
1
12ML2
25 / 41

Urti
Corporigido
Teorema di Huygens-Steiner
Noto il momento d’inerzia rispetto ad un asse passante per il CMe possibile determinare il momento d’inerzia rispetto ad un altroasse parallelo al primo, posto a distanza d.
Poniamo senza perdere di generalita di conoscere il momento
d’inerzia di un corpo rispetto all’asse z′, e sempre senza perderedi generalita prendiamo un sistema di riferimento in cui l’asse z e
parallelo a z′ e la posizione del centro di massa erCM = (xCM , yCM ), con x2CM + y2CM = d2. Abbiamo cheri = rCM + r′i, dove r′i e la posizione di un punto nel SCM.
26 / 41

Urti
Corporigido
Abbiamo dunque:
I =∑i
mir2i =
∑i
mi(rCM + r′i)2 =
=∑i
mi((xCM + x′i)2 + (yCM + y′i)
2) =
=∑i
mi(x2CM + y2CM ) +
∑i
mi((x′i)2 + (y′i)
2)+
+ 2xCM
∑i
mix′i + 2yCM
∑i
miy′i =
=∑i
mi(x2CM + y2CM ) +
∑i
mi((x′i)2 + (y′i)
2)
I = Md2 + I ′
27 / 41

Urti
Corporigido
Momento d’inerzia
Come esempio di applicazione del teorema di Huygens-Steinercalcoliamo il momento d’inerzia di un asta sottile rispetto ad unasse passante per un’estremita, usando il momento d’inerziarispetto ad un asse passante per il CM calcolato in precedenza.Abbiamo:
I = ICM +M(L/2)2 =
=1
12ML2 +
1
4ML2 =
1
3ML2
28 / 41

Urti
Corporigido
Momento d’inerzia
Come esempio di applicazione del teorema di Huygens-Steinercalcoliamo il momento d’inerzia di un asta sottile rispetto ad unasse passante per un’estremita, usando il momento d’inerziarispetto ad un asse passante per il CM calcolato in precedenza.Abbiamo:
I = ICM +M(L/2)2 =
=1
12ML2 +
1
4ML2 =
1
3ML2
29 / 41

Urti
Corporigido
Tabella momenti d’inerzia
30 / 41

Urti
Corporigido
Momento d’inerzia di un cilindro cavo
Per calcolare momenti d’inerzia di oggetti con cavita di formaregolare puo essere utile ”realizzare” il foro come una zona in cuisi sovrappongono due oggetti di cui uno di densita negativa: inquesto modo il foro e un’area a densita zero.
Come esempio consideriamo il cilindro cavo di raggio interno R1,raggio esterno R2, massa M e altezza h, e determiniamone ilmomento d’inerzia rispetto ad un asse passante per l’asse delcilindro.
31 / 41

Urti
Corporigido
Momento d’inerzia di un cilindro cavo
Abbiamo:
I = IR2 − IR1 =1
2M2R
22 −
1
2M1R
21 =
1
2(ρπR2
2h)R22 −
1
2(ρπR2
1h)R21 =
1
2(ρπh)(R4
2 −R41) =
=1
2(ρπh)(R2
2 −R21)(R2
2 +R21) =
1
2M(R2
2 +R21)
Occorre in generale prestare attenzione alla normalizzazione dellamassa dell’oggetto ottenuto sommando o sottraendo varie formeelementari.
32 / 41

Urti
Corporigido
Pendolo semplice
Usiamo quanto visto fin’ora per trovare l’equazione del moto diun pendolo.
Abbiamo che:
L’energia meccanica si conserva
La forza peso agente sulla massaM e equivalente a quella su uncorpo puntiforme di massa M ,abbiamo cheU(θ(t)) = −MgR cos(θ(t)) -U(θ = π/2) = 0.
L’energia cinetica e data da
Ec = 12I(
dθ
dt)2 =
12(MR2 + 0)(
dθ
dt)2 - nell’ipotesi
che il corpo sia cosı piccolo datrascurarne il momento d’inerziarispetto al CM.
33 / 41

Urti
Corporigido
Pendolo semplice
Emecc = Ec + U =1
2MR2(
dθ
dt)2 −MgR cos(θ(t))
dEmecc
dt= MR2(
dθ
dt)(d2θ
dt2) +MgR sin(θ(t))(
dθ
dt) = 0
(d2θ
dt2) +
g
Rsin(θ(t)) ≈ (
d2θ
dt2) + ω2θ(t) = 0 con ω =
√g
R
θ(t) = A sin(ωt+ φ)
34 / 41

Urti
Corporigido
Pendolo composto
Quando al posto di un oggetto puntiforme facciamo oscillare uncorpo rigido vincolato ad un asse passante per un suo puntoparliamo di ”pendolo composto” o ”pendolo fisico”.
U(θ(t)) = −Mgd cos(θ(t))
Ec =1
2I(
dθ
dt)2
(d2θ
dt2) +
Mgd
Isin(θ(t)) ≈
≈ (d2θ
dt2) + ω2θ(t) = 0
con ω =
√Mgd
I
35 / 41

Urti
Corporigido
Pendolo composto
Come esempio di pendolo composto consideriamo il pendolo compostoda un filo di massa nulla di lunghezza L e una sfera di massa m eraggio r. Il momento d’inerzia rispetto all’asse passante per il punto disospensione e:
I = ICM +md2 =2
5mr2 +m(L+ r)2
e la pulsazione:
ω =
√Mgd
I=
√g(L+ r)
( 25 r
2 + (L+ r)2)I =
= ω0
√1
( 25
r2
(L+r)2 + 1)
Notiamo che ω < ω0: cio e dovuto al fatto che nel caso del pendolo
fisico parte dell’energia cinetica ricavata dalla discesa del CM e usata
per mettere in rotazione la sfera.36 / 41

Urti
Corporigido
Momento della quantita di moto
Per un oggetto che ruota non si puo parlare di conservazionedella quantita di moto, in quanto in ogni istante le velocita deicorpi sono diverse. Occorre trovare una grandezza che si conserviper oggetti in rotazione uniforme.
Nel caso di oggetti in moto rettilineo non sottoposti a forze
abbiamo chedEc
dt= 1
2m
dP 2
dt= 1
2m PdP
dt= 0 quando
P = K. La corrispondente grandezza per un oggetto di massa min rotazione con velocita angolare ω su una circonferenza di
raggio r edEc
dt= 1
2I (mr rω)dmr rω
dt= 1
2I (mr v)dmr v
dt.
Quindi l’equivalente della grandezza vettoriale P e una grandezzail cui modulo e |L| = mrv. Tuttavia non possiamo costruirequesta grandezza con il prodotto scalare che conosciamo, perchenel moto circolare i vettori velocita e posizione sonoperpendicolari tra di loro.
37 / 41

Urti
Corporigido
Prodotto vettoriale
Il prodotto vettoriale e una operazione binaria che ha comeargomento due vettori, e restituisce un terzo vettore. Dati duevettori A, B si ha per C = A×B :
Il modulo di C e |A||B| sin(θ), con θ angolo compreso traA e B.
C e perpendicolare al piano individuato da A e B, e quindiad ognuno di essi.
Il prodotto vettore e nullo se A e B sono paralleli.
Il verso di C si determina con la ”regola della manodestra”...
Il prodotto vettore e anticommutativo: se C = A×B alloraB×A = −C = −A×B
Il prodotto vettore e distributivo: se(A + A′)×B = A×B + A′×B
38 / 41

Urti
Corporigido
39 / 41

Urti
Corporigido
ω = zω
ri = Ri + ri ‖ ωvP = ω×ri = ω×Ri
vP = |Ri|ω perche Ri ⊥ ω
L’origine O puo esserein una qualsiasi posizionedell’asse di rotazione...
40 / 41

Urti
Corporigido
Momento Angolare
Il Momento Angolare della Quantita di Moto permette didescrivere la cinematica - e dinamica - dei rimanenti treparametri del corpo rigido.
Definiamo il Momento Angolare - SEMPRE rispetto ad un puntoO chiamato ”POLO” come:
L = m (r(t) − rO(t))×v(t) (1)
. Dalla definizione segue che:
Un oggetto in moto rettilineo uniforme ha momentoangolare costante - eventualmente nullo quando il polo epreso sulla traiettoria.Un oggetto in moto circolare ha momento angolare rispettoal centro della circonferenza di raggio R percorsa|L| = mv(t)R, diretto perpendicolarmente al piano dellacirconferenza e orientato secondo il verso di rotazioneseguendo la ”regola della vite”41 / 41














![[Gerritsen Tess] Corpi Senza Volto](https://static.fdocumenti.com/doc/165x107/55cf9d84550346d033adf70b/gerritsen-tess-corpi-senza-volto.jpg)

