Daniele Grizzi 5 B Liceo Scientifico Tecnologico IIS Emilio Alessandrini Esame di Stato 2007.
Propagazione L-ALezioni del prof. Vittorio Degli Esposti dell’a.a. 2008/09
con integrazioni dell’a.a. 2009/10
Marco AlessandriniNovembre 2009 – Gennaio 2010
C.d.L. in Ingegneria Elettronica e delle TelecomunicazioniSeconda Facolta di Ingegneria - Sede di Cesena
Universita degli Studi di Bologna

CC© BY:© $\© =©Quest’opera e stata rilasciata sotto la licenza Creative Commons Attribu-
zione-Non commerciale-Non opere derivate 2.5 Italia. Per leggere una copiadella licenza visita il sito web
http://creativecommons.org/licenses/by-nc-nd/2.5/it/
o spedisci una lettera a Creative Commons, 171 Second Street, Suite 300, SanFrancisco, California, 94105, USA.
E consentito riprodurre e distribuire liberamente il presente testo, senza apporvi modi-fiche e mantenendo sempre riconoscibile il nome degli autori, purche non a scopo di lucro,senza scopi commerciali (direttamente o indirettamente) e per esclusivo uso personale.
E possibile pubblicare il file o sue parti su siti internet, purche sia citato in manieraevidente l’autore.
Per qualunque informazione, problematica, suggerimento o reclamo utilizzare l’indiriz-zo marco [email protected].
Indice
1 Generalita 71.1 Definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.1 Campo elettrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.1.2 Campo magnetico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.1.3 Densita di carica e di corrente . . . . . . . . . . . . . . . . . . . . . . 91.1.4 Teoremi di Gauss e Stokes . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 Postulati dell’elettromagnetismo macroscopico . . . . . . . . . . . . . . . . . 101.2.1 Equazioni di Maxwell puntiformi . . . . . . . . . . . . . . . . . . . . 11
1.3 Relazioni costitutive di materiale . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Equazioni di Maxwell 132.1 Condizioni di continuita del campo su una superficie di separazione . . . . . 13
2.1.1 Continuita delle componenti normali . . . . . . . . . . . . . . . . . . 132.1.2 Continuita delle componenti tangenti . . . . . . . . . . . . . . . . . . 14
2.2 Campi vettoriali in regime sinusoidale . . . . . . . . . . . . . . . . . . . . . 142.2.1 Equazioni di Maxwell per fasori . . . . . . . . . . . . . . . . . . . . . 152.2.2 Qualita elettromagnetica dei conduttori . . . . . . . . . . . . . . . . 162.2.3 Conduttore elettrico perfetto . . . . . . . . . . . . . . . . . . . . . . 17
3 Polarizzazione 183.1 Scomposizione in due polarizzazioni lineari . . . . . . . . . . . . . . . . . . . 19
3.1.1 Polarizzazioni lineari in quadratura di fase . . . . . . . . . . . . . . . 193.1.2 Polarizzazioni lineari ortogonali . . . . . . . . . . . . . . . . . . . . . 21
3.2 Scomposizione in due polarizzazioni circolari . . . . . . . . . . . . . . . . . . 213.2.1 Vettori complessi paralleli, ortogonali, perpendicolari, coniugati . . . 22
4 Relazioni energetiche 234.1 Potenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.2 Potenza complessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.3 Teorema di Poynting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3.1 Teorema di Poynting nel dominio del tempo . . . . . . . . . . . . . . 254.3.2 Teorema di Poynting nel dominio della frequenza . . . . . . . . . . . 25
4.4 Teorema di unicita della soluzione . . . . . . . . . . . . . . . . . . . . . . . 264.4.1 Teorema di unicita nel dominio del tempo . . . . . . . . . . . . . . . 264.4.2 Teorema di unicita nel dominio della frequenza . . . . . . . . . . . . 274.4.3 Teorema di unicita per V → V∞ . . . . . . . . . . . . . . . . . . . . 28
5 Soluzione del problema di Maxwell omogeneo 295.1 Equazioni delle onde nel dominio del tempo . . . . . . . . . . . . . . . . . . 295.2 Equazioni delle onde nel dominio della frequenza . . . . . . . . . . . . . . . 305.3 Soluzione generale dell’equazione di Helmholtz . . . . . . . . . . . . . . . . 30
Indice 3
Propagazione L-A CC© BY:© $\© =©
5.4 Onde piane uniformi TEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.4.1 Riflessione e rifrazione di onde piane . . . . . . . . . . . . . . . . . . 34
6 Problema non omogeneo 396.1 Soluzione delle equazioni di Maxwell attraverso l’uso del potenziale vettore 39
6.1.1 Soluzione dell’equazione di Green . . . . . . . . . . . . . . . . . . . . 416.1.2 Soluzione deduttiva dell’equazione di Helmholtz . . . . . . . . . . . . 426.1.3 Soluzione ufficiale dell’equazione di Helmholtz . . . . . . . . . . . . . 43
7 Radiazione 447.1 Momento della sorgente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 447.2 Campi reattivi e campi radiativi . . . . . . . . . . . . . . . . . . . . . . . . 44
7.2.1 Campo lontano rispetto a λ . . . . . . . . . . . . . . . . . . . . . . . 467.2.2 Bipolo infinitesimo di corrente . . . . . . . . . . . . . . . . . . . . . 46
7.3 Momento equivalente di un’antenna estesa . . . . . . . . . . . . . . . . . . . 487.3.1 Campo elettromagnetico di un’antenna estesa . . . . . . . . . . . . . 497.3.2 Momento equivalente su sistema di riferimento traslato . . . . . . . 507.3.3 Potenza irradiata e superficie di radiazione . . . . . . . . . . . . . . 517.3.4 Diagramma di radiazione di un’antenna . . . . . . . . . . . . . . . . 53
7.4 Parametri di caratterizzazione di un’antenna . . . . . . . . . . . . . . . . . 537.5 Equazione del radiocollegamento (di Friis) . . . . . . . . . . . . . . . . . . . 577.6 Bipolo corto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 577.7 Cenni sulle antenne rettilinee . . . . . . . . . . . . . . . . . . . . . . . . . . 59
7.7.1 Bipolo λ/2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.8 Teorema di reciprocita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.8.1 Tratta radio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
A Operazioni vettoriali 63A.1 Operazioni su vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
A.1.1 Modulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63A.1.2 Prodotto scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63A.1.3 Prodotto vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63A.1.4 Prodotto misto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64A.1.5 Prodotti quadrupli . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64A.1.6 Derivate di vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65A.1.7 Integrali di vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
A.2 Vettore posizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65A.2.1 Campi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
A.3 Integrale curvilineo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66A.3.1 Integrali di campi scalari . . . . . . . . . . . . . . . . . . . . . . . . 66A.3.2 Integrali di campi vettoriali . . . . . . . . . . . . . . . . . . . . . . . 66
A.4 Superfici. Integrali di superficie . . . . . . . . . . . . . . . . . . . . . . . . . 66A.5 Coordinate curvilinee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
A.5.1 Integrali con coordinate curvilinee . . . . . . . . . . . . . . . . . . . 67
B Campi vettoriali 68B.1 Campi conservativi e campi irrotazionali . . . . . . . . . . . . . . . . . . . . 68B.2 Campi solenoidali e campi indivergenti . . . . . . . . . . . . . . . . . . . . . 69
B.2.1 Proprieta dei campi solenoidali . . . . . . . . . . . . . . . . . . . . . 70B.3 Campi armonici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Elenco delle figure 71
4 Indice

Il lavoro di Maxwell ha cambiato il mondo per sempre.
- Albert Einstein -

CAPITOLO 1
Generalita
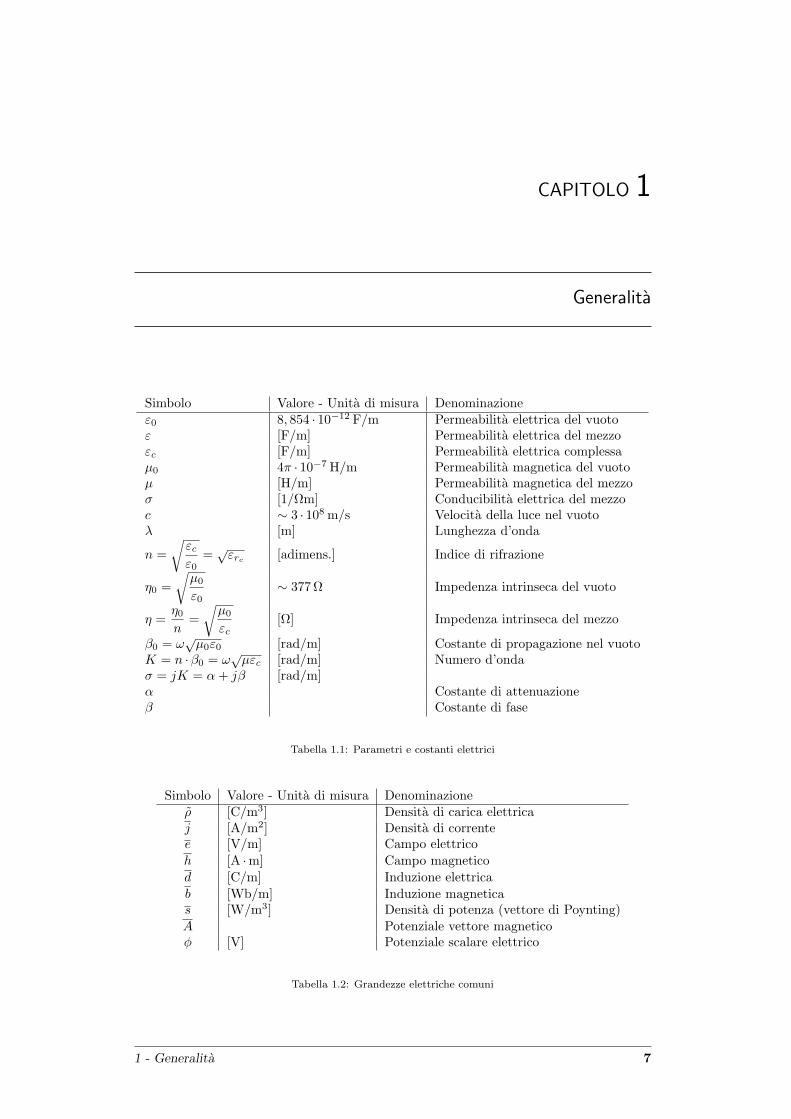
Simbolo Valore - Unita di misura Denominazioneε0 8, 854 · 10−12 F/m Permeabilita elettrica del vuotoε [F/m] Permeabilita elettrica del mezzoεc [F/m] Permeabilita elettrica complessaµ0 4π · 10−7 H/m Permeabilita magnetica del vuotoµ [H/m] Permeabilita magnetica del mezzoσ [1/Ωm] Conducibilita elettrica del mezzoc ∼ 3 · 108 m/s Velocita della luce nel vuotoλ [m] Lunghezza d’onda
n =√εcε0
= √εrc [adimens.] Indice di rifrazione
η0 =√µ0
ε0∼ 377 Ω Impedenza intrinseca del vuoto
η =η0
n=õ0
εc[Ω] Impedenza intrinseca del mezzo
β0 = ω√µ0ε0 [rad/m] Costante di propagazione nel vuoto
K = n ·β0 = ω√µεc [rad/m] Numero d’onda
σ = jK = α+ jβ [rad/m]α Costante di attenuazioneβ Costante di fase
Tabella 1.1: Parametri e costanti elettrici
Simbolo Valore - Unita di misura Denominazioneρ [C/m3] Densita di carica elettricaj [A/m2] Densita di correntee [V/m] Campo elettricoh [A ·m] Campo magneticod [C/m] Induzione elettricab [Wb/m] Induzione magneticas [W/m3] Densita di potenza (vettore di Poynting)A Potenziale vettore magneticoφ [V] Potenziale scalare elettrico
Tabella 1.2: Grandezze elettriche comuni
1 - Generalita 7

Propagazione L-A CC© BY:© $\© =©
1.1 Definizioni
1.1.1 Campo elettrico
Definizione 1 (Esperimento di Coulomb). Si pongono due cariche elettriche q1 e q2 auna distanza r. La forza alla quale e soggetta q2 provocata dal campo di q1 e:
F =q1 · q2
4πr2 · ε0· ir
dove ir e il versore radiale definito da q1 in direzione di q2.
Figura 1.1: Carica Q e campo elettrico
Avendo solo una carica Q (figura 1.1), deve esserci un campo di forze proporzionalialla carica (campo elettrico):
e(P ) =Q
4πr2 · ε0· ir [V/m]
per cui F = q · e, che significa che la presenza di cariche nello spazio genera forze, verificabilicon una carica di prova (q).
Si puo anche scrivere:
e · ε0︸︷︷︸d(P )
=Q
4πr2· ir
dove d(P ) e il campo di induzione elettrica. Moltiplicando entrambi i membri per il versoreir si ottiene il modulo di d e la relazione tra la carica Q e il campo a una certa distanza r:
d · ir︸︷︷︸|d|
=Q
4πr2· ir · ir︸ ︷︷ ︸
1
d · 4πr2 = Q
S e la superficie della sfera di raggio r sulla quale si manifesta il campo. Si dimostra chela regola vale per ogni tipo di superficie, anche non sferica:∮
S
d · in dS = Q oppure∮S
e · in dS =Q
ε0
dove in e il versore normale alla superficie S.
1.1.2 Campo magnetico
Definizione 2 (Esperimento di Ampere). La presenza di una corrente i (figura 1.2) ge-nera una modificazione dello spazio, attraverso la presenza di un campo di forze (campomagnetico):
h(P ) =i
2πr· iφ
dove iφ e il versore azimutale definito sul piano xy attorno all’asse z sul quale scorre lacorrente.
8 1.1 - Definizioni

Propagazione L-A CC© BY:© $\© =©
Figura 1.2: Corrente i e campo magnetico
Operando analogamente al campo elettrico si ottiene la relazione:
|h| = h =i
2πr⇒ i = h · 2πr
dove 2πr e la lunghezza della circonferenza di raggio r definita dal campo h.Si puo generalizzare con il caso di una linea qualunque L, dotata di versore tangente
il:
i =∮Lh · il dl
La forza associata al campo magnetico esiste solo con una carica q di prova, in movimentocon velocita v:
F = q(v × µ0 ·h)
Il campo di induzione magnetica e legato al campo magnetico dalla costante di permeabilitamagnetica del vuoto: b = µ0 ·h.
1.1.3 Densita di carica e di corrente
Definizione 3 (Densita di carica elettrica). Campo scalare che lega la carica infinitesimaal volume infinitesimo:
ρ(P )def.=
dq
dV
[C/m3
]Definizione 4 (Densita di corrente). Campo vettoriale presente quando le cariche simuovono, con velocita v:
j(P )def.= ρ · v(P )
[A/m2
]La corrente attraverso una superficie infinitesima e:
didef.=
dq
dt= j · dS [A]
Generalizzando:i =
∫S
j · in dS
Definizione 5 (Densita di carica superficiale). Campo scalare presente quando la caricasi muove non nei volumi, ma su superfici:
ρS(P, t)[C/m2
]Definizione 6 (Densita di corrente superficiale). Campo vettoriale presente quando lecariche si muovono su superfici:
jS(P ) [A/m]
La corrente lungo un percorso infinitesimo e:
didef= . jS · in · dL [A]
Generalizzando:i =
∫LjS · in dL
1.1 - Definizioni 9

Propagazione L-A CC© BY:© $\© =©
Definizione 7 (Densita di carica lineare). Campo scalare presente quando la carica simuove non lungo percorsi lineari:
ρL [C/m]
Definizione 8 (Forza di Lorentz). Riassume le forze che subisce una carica puntiformein movimento, a causa di campi elettrici e magnetici:
F = q(e+ v × µ0h)
Se la carica non e puntiforme, se ne considera un volumetto con carica e velocita costantesul quale calcolare F :
dF
dV=
dq
dV(e+ v × µ0h)
cioe si ottiene la densita di forza di Lorentz:
f = ρ(e+ v × b)
f = ρ · e+ j × b)
1.1.4 Teoremi di Gauss e Stokes
Teorema 1 (Teorema di Gauss). Il flusso di un campo vettoriale A, uscente da unasuperficie chiusa (figura 1.3(b)), e uguale alla divergenza di A, contenuta nel volumeracchiuso dalla superficie. ∫∫∫
V
∇ ·AdV =∫∫
S
A · in dS
Il flusso del campo elettrico, uscente da una superficie chiusa, e proporzionale alla quantitadi cariche presenti nel volume racchiuso dalla superficie.
Teorema 2 (Teorema di Stokes). La circuitazione di un campo vettoriale A lungo lafrontiera della superficie (L, figura 1.3(a)) e uguale al flusso uscente attraverso la superficie(S). ∮
LA · il dl =
∫∫S
(∇×A) · in dS
L e S sono concatenate.
1.2 Postulati dell’elettromagnetismo macroscopico
1) Esistenza della densita di carica In un volume V racchiuso entro una superficieS esiste una densita di carica ρ(P, t) ([C/cm3]) che e un campo scalare tempo-invariante.
Q =∫∫∫
V
ρ dV
j = ρ · v
2) Conservazione della carica
• In un sistema isolato, la carica elettrica e costante.
• Non e possibile distruggere carica, ma solo trasferirla.
• Equazione di continuita:
I =∮S
j · in dS = − d
dt
∫∫∫V
ρ dV
= − d
dtQ
10 1.2 - Postulati dell’elettromagnetismo macroscopico

Propagazione L-A CC© BY:© $\© =©
3) Densita di forza di Lorentz Esistono forze legate ai campi elettromagnetici:
f(P, t) = ρ · e+ j × b
4) Equazioni di Maxwell
I.∮Le · il dl = − d
dt
∫∫S
b · in dS
II.∮Lh · il dl =
d
dt
∫∫S
d · in dS +∫∫
S
j · in dS
III.∮S
d · in dS =∫∫∫
V
ρ dV = Q
IV.∮S
b · in dS = 0
(a) Superficie aperta e linee concate-nate
(b) Superficie chiusa
Figura 1.3: Geometrie spaziali di definizione delle equazioni di Maxwell
1.2.1 Equazioni di Maxwell puntiformi
Le equazioni di Mawxell non hanno validita se non definendo le geometrie ove utilizzarle.Con i teoremi di Gauss e di Stokes si possono riscrivere le equazioni, relativamente ad unpunto nello spazio.
Le equazioni III e IV valgono per una superficie chiusa (figura 1.3(b)).
III. Si fa tendere S a P : anche V , allora, tende a diventare un interno di P . Per ilteorema di Gauss: ∫∫∫
V
∇ · d︸︷︷︸cost.
dV =∫∫∫
V
ρ︸︷︷︸cost.
dV
∇ · d dV = ρ dV
∇ · d = ρ
cioe la divergenza del campo di induzione elettrica e uguale alla densita di carica.
IV. Analogamente:∇ ·h = 0
cioe la divergenza del campo di induzione magnetica e nulla.Le equazioni I e II valgono per una superficie aperta con linee concatenate alla superficie
(figura 1.3(a)).
1.2 - Postulati dell’elettromagnetismo macroscopico 11

Propagazione L-A CC© BY:© $\© =©
I. Per il teorema di Stokes:∮Le · il dl =
∫∫S
(∇× e) · in dS
= − d
dt
∫∫S
b · in dS
Facendo tendere L a P , nell’intorno di P le grandezze sono costanti:
(∇× e) · in dS = − d
dtb · in dS
(∇× e) · in = − d
dtb · in ∀in
∇× e = − d
dtb
cioe il rotore del campo elettrico e uguale all’opposto della derivata del campo di induzionemagnetica.
II. Analogamente:
∇× h =d
dtd+ j
cioe il rotore del campo magnetico e uguale alla somma tra la derivata del campo diinduzione elettrica e la densita di corrente.
Una conseguenza importante delle equazioni di Maxwell e la equazione di continuita,che esprime la conservazione della carica in forma puntuale:
∇ · j = −∂ρ∂t
1.3 Relazioni costitutive di materiale
Dipendono, e sono imposte, dalle caratteristiche del mezzo impiegato. Ogni mezzo haparametri ε e µ caratteristici.
Le relazioni costitutive valgono in mezzi normali (lineari, isotropi, tempo-invarianti).
• d = ε · e
• b = µ ·h
• Equazione del trasporto: jc = σ · ein particolare j = jc + ji, dove jc e la densita di corrente di conduzione (dovuta allecariche in movimento) e ji e la densita di corrente impressa (indipendente dai campielettromagnetici).
12 1.3 - Relazioni costitutive di materiale
CAPITOLO 2
Equazioni di Maxwell
2.1 Condizioni di continuita del campo su una super-ficie di separazione
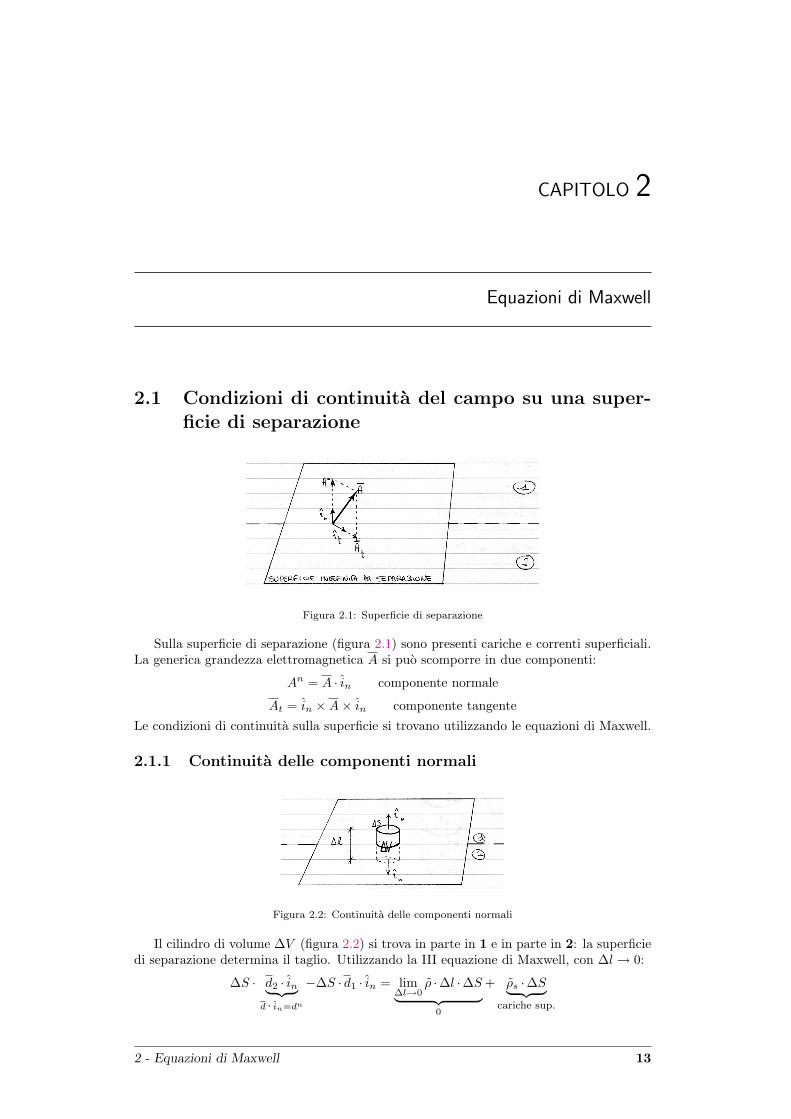
Figura 2.1: Superficie di separazione
Sulla superficie di separazione (figura 2.1) sono presenti cariche e correnti superficiali.La generica grandezza elettromagnetica A si puo scomporre in due componenti:
An = A · in componente normale
At = in ×A× in componente tangenteLe condizioni di continuita sulla superficie si trovano utilizzando le equazioni di Maxwell.
2.1.1 Continuita delle componenti normali
Figura 2.2: Continuita delle componenti normali
Il cilindro di volume ∆V (figura 2.2) si trova in parte in 1 e in parte in 2: la superficiedi separazione determina il taglio. Utilizzando la III equazione di Maxwell, con ∆l→ 0:
∆S · d2 · in︸ ︷︷ ︸d · in=dn
−∆S · d1 · in = lim∆l→0
ρ ·∆l ·∆S︸ ︷︷ ︸0
+ ρs ·∆S︸ ︷︷ ︸cariche sup.
2 - Equazioni di Maxwell 13

Propagazione L-A CC© BY:© $\© =©
cioedn2 − dn1 = ρs
che significa che le componenti normali del campo di induzione elettrica sono continue (ameno di una costante).
Elaborando ulteriormente si puo scrivere:
ε2 · en2 − ε1 · en1 = ρs
cioebn2 − bn1 = 0
che significa che le componenti normali del campo di induzione magnetica sono continue,anche in presenza di cariche.
2.1.2 Continuita delle componenti tangenti
Figura 2.3: Continuita delle componenti tangenti
La superficie (figura 2.3) e ∆Σ = ∆a ·∆l. Con ∆l → 0 e la I equazione di Maxwell siottiene:
∆a · e2 · it︸ ︷︷ ︸circuit. oraria
− ∆a · e1 · it︸ ︷︷ ︸circuit. antioraria
= − ∂
∂tlim
∆l→0
∫∫∆Σ
b · ib dS
= − ∂
∂tlim
∆l→0b · ib ·∆a ·∆l
= 0e2 · it − e1 · it = 0
che significa che le componenti tangenti del campo elettrico sono sempre continue.Sapendo che it = ib × in si puo proseguire, usando anche la II equazione di Maxwell:
ib × in · e2 − ib × in · e1 = 0ib × in ·h2 − ib × in ·h1 = js · ib
flusso della corrente superficiale
nella linea di intersezione tra le due superfici
in × h2 · ib − in × h1 · ib = js · ibin × h2 − in × h1 = js ∀ib
in × h2 × in − in × h1 × in = js × inh2t − h1t = js × in
che significa che le componenti tangenti del campo magnetico sono continue (a meno dellacorrente superficiale).
2.2 Campi vettoriali in regime sinusoidale
Il caso sinusoidale e importante perche usato da tutti i sistemi di telecomunicazioni.
14 2.2 - Campi vettoriali in regime sinusoidale

Propagazione L-A CC© BY:© $\© =©
Poiche il problema e lineare, anche a partire da una sola grandezza sinusoidale tutto ilproblema e sinusoidale, senza creazione di onde a frequenza superiore. A una grandezzascalare sinusoidale si associa un fasore:
v(t) = v0 · cos(ωt+ ϕ) → V
Campo vettoriale sinusoidale.
e(P, t) = ExM (P ) cos [ωt+ ϑx(P )] · ix + EyM (P ) cos [ωt+ ϑy(P )] · iy +
+EzM (P ) cos [ωt+ ϑz(P )] · iz
ω = 2πf , T =2πω
=1f
=[ExM (P ) cosϑx(P )ix + EyM (P ) cosϑy(P )iy + EzM (P ) cosϑz(P )iz
]cosωt+
−[ExM (P ) sinϑx(P )ix + EyM (P ) sinϑy(P )iy + EzM (P ) sinϑz(P )iz
]sinωt
= Er cosωt− Ei sinωt
Quindi si associa il fasore rappresentativo:
e(P, t)→ E(P ) = Er(P ) + jEi(P )= Exix + Ey iy + Ez iz
con:
Ex = ExM (cosϑx + j sinϑx) = ExM · ejϑxEy = EyM (cosϑy + j sinϑy) = EyM · ejϑyEz = EzM (cosϑz + j sinϑz) = EzM · ejϑz
Per ritornare al campo vettoriale iniziale:
e(P, t) = <E(P ) · ejωt
Campo scalare sinusoidale.
ρ(P, t) = ρM cos(ωt+ ϑ)= ρM (cosωt · cosϑ− sinωt · sinϑ)
ρ(P ) = ρM cosϑ− jρM sinϑ= ρr − jρi
ρ(P, t) = <ρ(P ) · ejωt
2.2.1 Equazioni di Maxwell per fasori
I. ∇×<E · ejωt
= − ∂
∂t<B · ejωt
II. ∇×<
H · ejωt
=
∂
∂t<D · ejωt
+ <
Jc · ejωt
+ <
J i · ejωt
III. ∇×<
D · ejωt
= <
ρ · ejωt
IV. ∇×<
B · ejωt
= 0
Commutando gli operatori differenziali con gli operatori parte reale:
I. <
(∇× E) · ejωt
= <−jωB · ejωt
II. <
(∇×H) · ejωt
= <
(jωD + Jc + J i) · ejωt
III. <
(∇×D) · ejωt
= <
ρ · ejωt
IV. <
(∇×B) · ejωt
= 0
2.2 - Campi vettoriali in regime sinusoidale 15

Propagazione L-A CC© BY:© $\© =©
In generale non e possibile affermare quanto segue:
<a = <b ⇒ a = b
perche non e noto nulla sulle rispettive parti immaginarie. Nel caso in esame, invece,questa relazione e valida, perche c’e una particolare dipendenza dal tempo. Allora epossibile riscrivere le equazioni:
I. ∇× E = −jωB
II. ∇×H = jωD + Jc + J i
III. ∇×D = ρ
IV. ∇×B = 0
Il vantaggio di tale notazione e che i campi sono tempo-invarianti, per cui non importaporre condizioni iniziali, ma bastano le condizioni ai limiti.
Alla stessa maniera e possibile riscrivere le relazioni costitutive e l’equazione di conti-nuita, usando i fasori:
D = ε ·EB = µ ·HJc = σ ·E
∇ · j = − ∂
∂tρ → ∇· J = −jωρ
Con queste scritture si puo dare una forma alternativa alla II equazione di Maxwell:
∇×H = jωD + Jc + J i
= jωεE + σE + J i
= jω(ε− j σ
ω
)︸ ︷︷ ︸
εc
E + J i
= jωεcE + J i
dove εc e la permeabilita elettrica complessa, che dipende da ω.
2.2.2 Qualita elettromagnetica dei conduttori
Per definire elettromagneticamente la qualita di un materiale (conduttore o dielettrico)non basta σ: si deve studiare il rapporto tra la parte immaginaria e la parte reale di εc.
• In un buon conduttore prevale la corrente di conduzione:σ
ω ε.
• In un buon dielettrico prevale la corrente di spostamento:σ
ω ε.
La frequenza determina la qualita di un materiale, che per certe frequenze puo essere unbuon conduttore e per certe altre un buon dielettrico. La demarcazione tra conduttori edielettrici e data dalla frequenza per cui
σ
ω= ε.
Un parametro unico per esplicare la qualita di un conduttore e la tangente dell’angolodi perdita:
R =σ
ω · εper cui:
• materiali con R 1 sono buoni conduttori;
• materiali con R 1 sono buoni dielettrici.
Si usa anche esprimere i parametri ε e µ relativamente al vuoto:
εr =ε
ε0permeabilita elettrica relativa
µr =µ
µ0permeabilita magnetica relativa
16 2.2 - Campi vettoriali in regime sinusoidale

Propagazione L-A CC© BY:© $\© =©
2.2.3 Conduttore elettrico perfetto
Si puo pensare idealmente di avere un conduttore elettrico perfetto quando σ → ∞. Cioimplica:
|εc| → ∞ µ limitata
Teorema 3. In un conduttore perfetto, i campi elettrico e magnetico sono nulli.
Dimostrazione. Per la II equazione di Maxwell:
∇×H = jωεc ·E ⇒ E =1
jωεc· ∇ ×H
|εc| → ∞ ⇒ E → 0
H = − 1jωµ
· ∇ × E︸ ︷︷ ︸0
⇒ H → 0
Teorema 4. In un conduttore perfetto:
• la componente normale del campo magnetico e nulla;
• la componente tangente del campo elettrico e nulla.
Dimostrazione. Considerando un conduttore (volume 1) immerso e separatoin un altro volume (2) si possono scrivere le equazioni di continuita:
dn2 = dn1︸︷︷︸0
+ρs e2t = e1t︸︷︷︸0
= 0
bn2 = bn1︸︷︷︸0
= 0 h2t = h1t︸︷︷︸0
+js × in
2.2 - Campi vettoriali in regime sinusoidale 17

CAPITOLO 3
Polarizzazione
Proiettiamo E = E(P ) lungo gli assi cartesiani:
E = Exix + Ey iy + Ez iz
= |Ex|ejϕx ix + |Ey|ejϕy iy + |Ez|ejϕz iz= |Ex|(cosϕx + sinϕx)ix + |Ey|(cosϕy + sinϕy )iy + |Ez|(cosϕz + sinϕz )iz= ER + jEI
cioe, esplicitando la parte reale ER e quella immaginaria EI :
ER = |Ex| cosϕxix + |Ey| cosϕy iy + |Ez| cosϕz iz
EI = |Ex| sinϕxix + |Ey| sinϕy iy + |Ez| sinϕz izE(P ) rappresenta il generico vettore e = e(P, t):
e(t) = <E · ejωt
= <
(ER + jEI) · ejωt
= <
(ER + jEI) · (cosωt+ j sinωt)
= ER cosωt− EI sinωt
e(t) in ogni punto varia nel tempo, pero appartiene sempre al piano individuato da ER eda EI . Le loro componenti lungo gli assi sono:
ER = ERx ix + ERy iyEI = EIx ix + EIy iy
per cui:e(t) =
(ERx cosωt− EIx sinωt
)︸ ︷︷ ︸x(t)
ix +(ERy cosωt− EIy sinωt
)︸ ︷︷ ︸y(t)
iy
dove x(t) e y(t) sono le componenti di e(t) lungo gli assi x e y del piano. Ricaviamo orasinωt e cosωt: sinωt = x ·ERy−y ·ERx
EIyERx−EIxERycosωt = x ·EIy−y ·EIx
EIyERx−EIxERy
La somma dei membri elevati al quadrato da:
(x ·ERy − y ·ERx)2 + (x ·EIy − y ·EIx)2 = (EIyERx − EIxERy )2
(ERy + EIx)2x2 + (ERx + EIx)2y2 − 2(ERxERy + EIxEIy )xy = (EIyERx − EIxERy )2
che e la forma non canonica di un’ellisse.La polarizzazione puo essere:
18 3 - Polarizzazione

Propagazione L-A CC© BY:© $\© =©
• circolare: ER⊥EI e |ER| = |EI |;
• ellittica;
• lineare: ER //EI , oppure uno dei due vettori e nullo.
Il verso di rotazione rispetto a z puo essere destrorso o sinistrorso, a seconda del prodottoix × iy = iz.
Definizione 9 (Vettore di polarizzazione). Vettore complesso che ha la stessa polarizza-zione del campo rappresentato (che gli e parallelo) e modulo unitario:
p =E
|E|· ejχ
Il vettore di polarizzazione separa le informazioni sull’intensita del campo dalle proprietadi polarizzazione:
E = p · |E| · e−jχ
3.1 Scomposizione in due polarizzazioni lineari
Teorema 5. Si puo sempre scomporre E in due polarizzazioni lineari distinte.
Ci sono due metodi privilegiati:
1. scomposizione in due polarizzazioni in quadratura di fase:
E = ER + jEI →
eR(t) = ER · cosωteI(t) = EI · sinωt = EI · cos
(ωt− π
2
)2. scomposizione in due polarizzazioni lineari ortogonali sul piano di polarizzazione,
parallele a ix e iy:
E = Exix + Ey iy
= |Ex|ejϕx ix + |Ey|ejϕy iy=
(|Ex |ix + |Ey|ejΦiy
)· ejϕx
La polarizzazione di E dipende dai moduli e da Φ = ϕy − ϕx.
3.1.1 Polarizzazioni lineari in quadratura di fase
Ci sono infinite possibilita:
E = ER + jEI =(ER · e−jδ + jEI · e−jδ
)· ejδ =
(E1 + jE2
)· ejδ
con: E1 = ER cos δ + EI sin δE2 = −ER sin δ + EI cos δ
⇒ e(t) = E1 cos(ωt+ δ)− E2 sin(ωt+ δ)
Bisogna cercare δ0 che da E10 e E20 tra loro ortogonali:
E10 ·E20 = 0(ER cos δ0 + EI sin δ0
)·(−ER sin δ0 + EI cos δ0
)= 0(
|EI |2 − |ER|2)
sin δ0 cos δ0︸ ︷︷ ︸sin 2δ0
2
+ER ·EI(cos2 δ0 − sin2 δ0
)︸ ︷︷ ︸cos 2δ0
= 0
12
tan(2δ0) ·(|ER|2 − |EI |2
)= ER ·EI
δ0 =12
arctan2ER ·EI
|ER|2 − |EI |2
3.1 - Scomposizione in due polarizzazioni lineari 19

Propagazione L-A CC© BY:© $\© =©
Consideriamo E10 e E20 . Si scelgono gli assi del sistema di riferimento con le direzioni diE10 e E20 ; l’asse x e concorde col vettore che ha modulo maggiore. Quindi:
E10 = A · ix0
E20 = B · iy0se |E10 | > |E20 | con A,B ∈ R, A > 0, A > |B|
oppure: E10 = B · iy0E20 = A · ix0
se |E10 | < |E20 | con A,B ∈ R, A > 0, A > |B|
Affinche E10 e E20 siano una terna destrorsa con iz, e necessario che il vettore con modulominore abbia verso concorde con il versore dell’asse identificato come y. In tal caso, Bpuo assumere segno positivo o negativo, a seconda dei casi:
E =(A · ix0 + jBiy0
)· ejδ0 con A > 0, A > |B|
Il riferimento principale ix0 , iy0 e l’unico che permette la scomposizione in due polarizza-zioni lineari ortogonali e in quadratura di fase.
e(t) = A cos(ωt+ δ0)︸ ︷︷ ︸x0
· ix0 −B sin(ωt+ δ0)︸ ︷︷ ︸y0
· iy0
⇒(x0
A
)2
+(y0
B
)2
= 1
che e un ellisse con gli assi che coincidono con quelli del sistema di riferimento. Per capire
qual e il verso di rotazione, si studiad
dtϑ.
tanϑ =y0
x0= −B
Atan(ωt+ δ0)
ϑ = arctan[−BA
tan(ωt+ δ0)]
d
dtϑ = −B
A
ω
B2
A2sin2(ωt+ δ0) + cos2(ωt+ δ0)
per cui:
• se B > 0, la polarizzazione e sinistrorsa (il senso di rotazione e orario);
• se B < 0, la polarizzazione e destrorsa (il senso di rotazione e antiorario);
• se B = 0, la polarizzazione e lineare;
• se A = |B| la polarizzazione e circolare e la velocita di rotazione e costante (d
dtϑ = ω).
Proprieta 3.1.1. Il segno di B e quello di ER × EI · iz, perche ER × EI · iz = A ·B.
Polarizzazione Antioraria Oraria
Lineare ER × EI · iz = 0
ER 6⊥EI oppure∣∣ER∣∣ 6= ∣∣EI ∣∣
EllitticaER × EI · iz < 0 ER × EI · iz > 0
ER⊥EI e∣∣ER∣∣ =
∣∣EI ∣∣Circolare
ER × EI · iz < 0 ER × EI · iz > 0
20 3.1 - Scomposizione in due polarizzazioni lineari

Propagazione L-A CC© BY:© $\© =©
3.1.2 Polarizzazioni lineari ortogonali
Coi fasori si puo scrivere:
E = Exix + Ey iy = |Ex|ejϕx ix + |Ey|ejϕy iy
Nel dominio del tempo:
e(t) = ex(t)ix + ey(t)iy= ExM cos(ωt+ ϕx)ix + EyM cos(ωt+ ϕy )iy= |Ex| cos(ωt)ix + |Ey| cos(ωt+ Φ)iy
con Φ = ϕy − ϕx
Polarizzazione Moduli FaseCircolare destrorsa uguali e Φ = −π2Ellittica destrorsa arbitrari e Φ < 0Rettilinea |Ex| = 0 oppure |Ey| = 0 oppure Φ = 0 oppure Φ = ±πEllittica sinistrorsa arbitrari e Φ > 0Circolare sinistrorsa uguali e Φ = +π
2
3.2 Scomposizione in due polarizzazioni circolari
Rispetto a chi guarda la direzione positiva dell’asse z si puo scrivere:id =
1√2
(ix − jiy
), pol. circ. destrorsa
is =1√2
(ix + jiy
), pol. circ. sinistrorsa
equivalenti a
ix =
1√2
(id + is
)iy =
j√2
(id − is
)Valgono le relazioni i∗d = is e i∗s = id. Analogamente ai casi precedenti si puo scrivere:
E = Edid + Esis[Ed =
1√2
(Ex + jEy) , Es =1√2
(Ex − jEy)]
=(E · i∗d
)id +
(E · i∗s
)is
=(E · is
)id +
(E · id
)is
qdef.=
EsEd
e il rapporto di polarizzazione circolare:
• con |q| > 1 la polarizzazione e ellittica sinistrorsa (circolare quando q →∞);
• con |q| = 0 la polarizzazione e rettilinea (ruotata con angolo −12
arg q);
• con |q| < 1 la polarizzazione e ellittica destrorsa (circolare quando q = 0).
q puo anche essere espresso come:
q =1− p1 + p
con pdef.= j
EyEx
p e il rapporto di polarizzazione rettilinea.
q →∞ ⇔ p = 1 pol. circolare sinistrorsa|q| > 1 ⇔ <p < 0 pol. ellittica sinistrorsa|q| = 1 ⇔ <p = 0 pol. rettilinea|q| < 1 ⇔ <p > 0 pol. ellittica destrorsaq = 0 ⇔ p = −1 pol. circolare destrorsa
3.2 - Scomposizione in due polarizzazioni circolari 21

Propagazione L-A CC© BY:© $\© =©
Gli assi dell’ellisse di polarizzazione stanno tra loro in relazione:
B
A=|q| − 1|q|+ 1
L’angolo formato dall’asse maggiore dell’ellisse con l’asse delle ascisse del sistema diriferimento vale:
Ψ = −arg(q)2
+ kπ
3.2.1 Vettori complessi paralleli, ortogonali, perpendicolari, co-niugati
Vettori paralleli. qJ = qE
J = cE , c ∈ C , |c| = |J ||E|
• Polarizzazioni ellittiche: stesso|B|A
, stesso verso di rotazione.
• Polarizzazioni rettilinee: stessa direzione.
• Polarizzazioni circolari: stesso verso di rotazione.
Vettori ortogonali (incrociate). qE = − 1q∗J
J∗ ·E = 0 ,
|qE | =1|qJ |
−arg(qJ)2
= −arg(qE)2
+ (2k + 1)π
2
• Polarizzazioni ellittiche: stesso|B|A
, versi opposti di rotazione, assi maggiori perpen-dicolari.
• Polarizzazioni rettilinee: direzioni perpendicolari.
• Polarizzazioni circolari: versi opposti di rotazione.
Vettori perpendicolari. qE = −qH
E ·H = 0
• Polarizzazioni ellittiche: stesso|B|A
, stesso verso di rotazione, assi maggiori perpen-dicolari.
• Polarizzazioni rettilinee: direzioni perpendicolari.
• Polarizzazioni circolari: stesso verso di rotazione.
Vettori coniugati. qF =1q∗E
F = E∗
• Polarizzazioni ellittiche: stesso|B|A
, versi opposti di rotazione.
• Polarizzazioni rettilinee: stessa direzione.
• Polarizzazioni circolari: versi opposti di rotazione.
Definizione 10 (Adattamento in polarizzazione). E la situazione nella quale avvieneil massimo trasferimento di potenza attiva. Si verifica quanto il campo incidente E hadirezione parallela a quella delle correnti impresse J , rappresentative dell’antenna.
22 3.2 - Scomposizione in due polarizzazioni circolari

CAPITOLO 4
Relazioni energetiche
4.1 Potenza
La forza di Lorentz puo essere espressa come:
f(P, t) = ρ · e+ j × b= ρ · e+ ρ · v × µ ·h
Il lavoro infinitesimo svolto da f in un tempo infinitesimo dt e:
dL =∫∫∫
V
f · v dt dV
=∫∫∫
V
(ρ · e · v) dt+(ρ · v × µ ·h
)· v︸ ︷︷ ︸
0
dt
dV(per le proprieta del prodotto misto)
=∫∫∫
V
(ρ · e · v) · v dV dt
=∫∫∫
V
f · e dV dt
Si ottiene allora la potenza:
p =dL
dt=
∫∫∫V
j · e dV
=∫∫∫
V
jc · e dV +∫∫∫
V
ji · e dV
=∫∫∫
V
σ · |e|2 dV︸ ︷︷ ︸>0
+∫∫∫
V
ji · e dV︸ ︷︷ ︸<0
La parte negativa della potenza, quando V → V∞, si puo scrivere:∫∫∫V
ji · e dVV→V∞= lim
T→∞
[1T
∫ T
0
∫∫∫V∞
ji · e dV dt
]< 0
Talvolta si usa scrivere:
pi = −∫∫∫
V
ji · e dV potenza dovuta a correnti impresse
4 - Relazioni energetiche 23

Propagazione L-A CC© BY:© $\© =©
per sottolineare il carattere negativo del contributo, anche quando V < +∞.In certi casi si puo scindere la densita di corrente impressa nei due contributi di sorgente
e utilizzatore:ji = j
(s)i + j
(u)i
Ai contributi si associano le relative potenze:
ps = limT→∞
1T
∫ T
0
∫∫∫V∞
j(s)i · e dV dt < 0
pu = limT→∞
1T
∫ T
0
∫∫∫V∞
j(u)i · e dV dt > 0
4.2 Potenza complessa
Considerando un sistema con una porta d’ingresso sulla quale siano presenti la correntei(t) e la tensione v(t), si possono definire:
• la potenza istantanea p(t) = v(t) · i(t);
• la potenza complessa PC = P + jQ =V · I∗
2.
P e la potenza attiva, cioe il valor medio sul periodo della potenza istantanea (pmedia).Infatti:
pmedia =1T
∫ T
0
p(t) dt
=1T
∫ T
0
v(t) · i(t) dt
in fasori: a(t) =A · ejωt +A∗ · e−jωt
2
=1T
∫ T
0
V · ejωt + V ∗ · e−jωt
2· I · e
jωt + I∗ · e−jωt
2dt
=1
4T
∫ T
0
(V I · e2jωt + V ∗I∗ · e−2jωt + V ∗I + V I∗
)dt
=1T
∫ T
0
V ∗I + V I∗
4dt+
1T
∫ T
0
V I · ej(2ω)t + V ∗I∗ · e−j(2ω)t
4dt︸ ︷︷ ︸
0 (integrale su periodo)
=V I∗ + V ∗I
4
=12· V I
∗ + (V I∗)∗
2
=12
(PC + P ∗C)
= P
Definizione 11 (Densita di potenza istantanea). p(t) = −e · ji. In un volume V si puoestendere la definizione:
P (t) =∫∫∫
V
p(t) dV
Definizione 12 (Densita di potenza complessa). E associata alle correnti impresse:
pC = −E · J∗i
2= p+ jq
p e il valor medio sul periodo della densita di potenza istantanea. In un volume V si puoestendere la definizione:
PC =∫∫∫
V
pC dV = P + jQ
24 4.2 - Potenza complessa

Propagazione L-A CC© BY:© $\© =©
4.3 Teorema di Poynting
Il teorema di Poynting permette di definire il bilancio di potenza di un sistema elettroma-gnetico.
4.3.1 Teorema di Poynting nel dominio del tempo
Definizione 13 (Vettore di Poynting). Campo vettoriale ottenuto come prodotto deicampi elettrico e magnetico:
s = e× h
La divergenza del vettore di Poynting e:
∇ · s = ∇(e× h
)= h · ∇ × e− e · ∇ × h
Con questa relazione si possono riscrivere la I e la II equazione di Maxwell, per poi sottrarrela II equazione (tutta in funzione di e) dalla I (tutta in funzione di h):
(I) h · (∇× e) = − ∂
∂t
(h ·µh
)−
(II) e ·(∇× h
)=
∂
∂t(e · εe) +e · jc + e · ji =
∇ · s = −(ε∂
∂te2 + µ
∂
∂th2
)−σe2 − e · ji
Considerando un volume V ed integrando su di esso:∫∫∫V
∇ · s dV =∫∫
V
−(ε∂
∂te2 + µ
∂
∂th2
)− σe2 − e · ji dV
cioe:
P (t) = −∫∫∫
V
e · ji dV =∮S
s · in dS +∂
∂t
∫∫∫V
(εe2 + µh2) dV +∫∫∫
V
σe2 dV
Cio significa che la densita di potenza P (t) si ripartisce su tre termini:
1. il flusso del vettore di Poynting, che rappresenta la potenza elettromagnetica uscentedal sistema, trasportata dall’onda elettromagnetica;
2. la variazione dell’energia immagazzinata nel volume V , nel quale ci sono i contributidell’energia elettrica ( εe
2
2 ) e di quella magnetica (µh2
2 );
3. la potenza dissipata per effetto Joule, associata alle correnti di conduzione.
|s| e la densita di potenza, mentre arg(s) indica direzione e verso lungo il quale e trasportatala potenza.
4.3.2 Teorema di Poynting nel dominio della frequenza
Definizione 14 (Vettore complesso di Poynting). Campo vettoriale ottenuto come pro-dotto dei campi elettrico e magnetico:
S =E ×H∗
2
La divergenza del vettore di Poynting e:
∇ ·S =H∗ ·(∇× E
)− E ·
(∇×H∗
)2
4.3 - Teorema di Poynting 25

Propagazione L-A CC© BY:© $\© =©
Con questa relazione si possono riscrivere la I e la II equazione di Maxwell, per poi sottrarrela II equazione (tutta in funzione di E) dalla I (tutta in funzione di H
∗) ed integrare:
(I) H∗ ·(∇× E
)= −jωH∗ ·B −
(II) E ·(∇×H = jωD +Jc + J i
)∗=
∮S
S · in dS + jω
∫∫∫V
B ·H∗ − E ·D∗
2dV +
∫∫∫V
σ|E|2
2dV = −
∫∫∫V
E · J i2
dV
flusso di Poynting variaz. della potenza e.m. immagazz. potenza dissipata potenza complessa totale
Cio significa che la potenza complessa totale PC = P + jQ si ripartisce su tre termini:
1. il flusso del vettore di Poynting, con la potenza attiva associata PS che e in relazionePCS = PS + jQS ;
2. la variazione della potenza elettromagnetica immagazzinata nel volume V , che con-tribuisce solo con potenza reattiva:
• densita di energia media magnetica: Tm = B ·H∗2 = 2 · µ ·H
∗
4 ;
• densita di energia media elettrica: Um = E ·D∗2 = 2 · ε ·E
∗
4 ;
3. la potenza dissipata per effetto Joule, associata alle correnti di conduzione.
Um e Tm sono i valori medi su un periodo dei corrispondenti valori nel dominio del tempo.Spezzando il teorema in parte reale e immaginaria:
P = PS + PjQ = QS + 2ω(Tm − Um) fornita dalle correnti impresse
Se Q = 0 il sistema e risonante. In tal caso, per V → V∞ si ha Tm = Um.
4.4 Teorema di unicita della soluzione
Il problema differenziale ammette soluzione quando sono fornite le condizioni al contorno.Nel caso canonico di un volume, racchiuso in una superficie al cui interno ci sono
correnti impresse, ci si chiede quali condizioni ai limiti bisogna dare affinche la soluzionesia unica.
4.4.1 Teorema di unicita nel dominio del tempo
Teorema 6 (di unicita della soluzione). In un problema di Maxwell, se σ 6= 0 in ognipunto di V e se sono fornite:
1. le correnti impresse Ji;
2. e, h in tutti i punti di V per t = 0 (condizione iniziale);
3. et oppure ht su S per ogni t > 0,
allora la soluzione e unica.
Dimostrazione (per assurdo). Si suppone che esistano due diversi campi elet-tromagnetici che soddisfano il problema di Maxwell con le stesse condizioni:e′, h
′e e′′, h
′′. Si definisce il campo differenza (e, h): (e = e′−e′′ , h = h
′−h′′).Si scrivono le prime due equazioni di Maxwell nei due casi e si fa la differenzamembro a membro: ∇× e = −µ∂h
∂t
∇× h = ε∂e
∂t+ σe spariscono le correnti impresse
26 4.4 - Teorema di unicita della soluzione

Propagazione L-A CC© BY:© $\© =©
Il campo differenza e soluzione delle equazioni di Maxwell omogenee. Lecondizioni al contorno (omogenee) sono sempre uguali:
et = e′t − e′′t = 0 su S
perche e′t = e′′t . Lo stesso vale per h. Si applica il teorema di Poynting alcampo differenza, mutilato del termine dovuto alle correnti impresse:∮
S
s · in dS︸ ︷︷ ︸HS
(e×h) · in dS
+∂
∂t
∫∫∫V
12
(εe2 + µh2) dV +∫∫∫
V
σe2 dV = 0
Il flusso del vettore di Poynting e nullo perche, scomponendo e ed h in compo-nenti tangenti e normali:
e = enin + et , h = hnin + ht
(e× h) · in = (enin + et)× (hnin + ht) · inche e un prodotto misto nel quale sopravvive solo il termine et×h · in, che peroe nullo perche e = 0. Quindi, integrando nel tempo cio che resta (per eliminarela derivata):∫ t
0
∂
∂t
∫∫∫V
12
(εe2 + µh2) dV dt =∫ t
0
−∫∫∫
V
σe2 dV dt
∫∫∫V
12
(εe2 + µh2) dV︸ ︷︷ ︸≥0
= −∫ t
0
∫∫∫V
σe2 dV dt︸ ︷︷ ︸≤0
= 0
La soluzione e obbligata. Cio significa che il campo differenza e nullo:
|e| = e = 0 , |h| = h = 0
cioe la soluzione e unica.
4.4.2 Teorema di unicita nel dominio della frequenza
Teorema 7 (di unicita della soluzione). In un problema di Maxwell, se σ 6= 0 in ognipunto di V e se sono fornite:
1. le correnti impresse Ji;
2. Et oppure Ht su S per ogni t > 0,
allora la soluzione e unica.
Dimostrazione (per assurdo). Si suppone che esistano due diversi campi elet-tromagnetici che soddisfano il problema di Maxwell con le stesse condizioni:E′, H′
e E′′, H′′. Si definisce il campo differenza (E,H): (E = E
′ −E′′ , H =H′ −H ′′).
Si scrivono le prime due equazioni di Maxwell nei due casi e si fa la differenzamembro a membro:
∇× E = −jωµ ·H∇×H = jωε ·E + σE spariscono le correnti impresse
Il campo differenza e soluzione delle equazioni di Maxwell omogenee. Lecondizioni al contorno (omogenee) sono sempre uguali:
Et = E′t − E
′′t = 0 su S
4.4 - Teorema di unicita della soluzione 27

Propagazione L-A CC© BY:© $\© =©
perche E′t = E
′′t . Lo stesso vale per H. Si applica il teorema di Poynting al
campo differenza, mutilato del termine dovuto alle correnti impresse:
<
∮S
E ×H∗
2· in dS
︸ ︷︷ ︸
0
+∫∫∫
V
12σ|E|2 dV = 0
=
∮S
E ×H∗
2· in dS
︸ ︷︷ ︸
0
+2ω∫∫∫
V
14
(µ|H|2 + ε|E|2) dV = 0
Il flusso del vettore di Poynting e nullo in ambo i casi, perche danno contributosolo le componenti tangenti, che pero sono a loro volta nulle. Poiche σ 6= 0,sicuramente deve essere |E| = 0, quindi E = 0. Allora anche H = 0. Ciosignifica che il campo differenza e nullo, cioe la soluzione e unica.
4.4.3 Teorema di unicita per V → V∞
Bisogna verificare se il teorema di unicita e soddisfatto nell’intero spazio (cioe quandoV → V∞). Non ha piu senso parlare di campi tangenti: al contorno rimangono solo dellecondizioni asintotiche1.
Si identifica un punto arbitrario O (origine del sistema di riferimento) al finito, poi sifa tendere il sistema di Maxwell all’infinito.
Teorema 8 (di unicita della soluzione all’infinito). In un problema di Maxwell, seσ 6= 0 in ogni punto di V e se sono fornite:
1. le correnti impresse Ji;
2. le condizioni al contorno (che devono essere soddisfatte):
limr→∞
r ·E = 0
limr→∞
r ·H = 0,
allora la soluzione e unica.
Dimostrazione (per assurdo). Si suppone che esistano due diversi campi elet-tromagnetici che soddisfano il problema di Maxwell con le stesse condizioni.Quindi, analogamente ai casi al finito:
limS→S∞
<
∮S
E ×H∗
2· in dS
+∫∫∫
V
12σ|E|2 dV = 0
limr→∞
∫∫4π
E ×H∗
2· ir · r2 dΩ +
∫∫∫V
12σ|E|2 dV = 0(
coord. sferiche su tutto lo spazio: dΩ =dS
r2
)limr→∞
∫∫ 2π
4π
r ·E × r ·H∗
2· ir dΩ︸ ︷︷ ︸
0
+∫∫∫
V
12σ|E|2 dV = 0
∫∫∫V
12σ|E|2 dV = 0
Poiche σ 6= 0, sicuramente deve essere |E| = 0, quindi E = 0. Allora anche H =0. Cio significa che il campo differenza e nullo, cioe la soluzione e unica.
1Condizioni di radiazione (o di regolarita) all’infinito.
28 4.4 - Teorema di unicita della soluzione

CAPITOLO 5
Soluzione del problema di Maxwell omogeneo
5.1 Equazioni delle onde nel dominio del tempo
Definizione 15 (Onda). Una generica grandezza a(z, t), dipendente da spazio (che persemplicita puo essere monodimensionale nella sola coordinata z) e tempo, e un’ondaquando si propaga nello spazio, mantenendo in maniera sostanziale la propria forma:
a(z, t) = f(z ± c · t︸ ︷︷ ︸y
)
L’espressione di y nella forma z±ct discrimina il fatto che la grandezza sia un’onda oppureno. Se y = z − ct l’onda e progressiva (trasla rigidamente lungo il senso positivo dell’assez), altrimenti se y = z + ct l’onda e regressiva. Un eventuale termine A(z) che moltiplicaf(y) determina l’attenuazione dell’onda durante la sua propagazione.
Si cerca la soluzione delle equazioni di Maxwell nel caso omogeneo, cioe senza correntiimpresse nella regione di spazio in analisi1. Consideriamo il mezzo omogeneo, quindiε = ε0, µ = µ0, σ = 0 sono costanti nello spazio.
Analizziamo le prime due equazioni di Maxwell:
∇× e = −µ∂h∂t
∇× h = ε∂e
∂t+ σe
Operiamo sulla seconda equazione, calcolando il rotore su entrambi i membri per disac-coppiarla dalla prima:
∇× (∇× h) = ε∂(∇× e)
∂t+ σ(∇× e)
= −µε∂2h
∂t2− µσ∂h
∂t
∇(∇ ·h)−∇2h = −µε∂2h
∂t2− µσ∂h
∂t
∇(∇ ·h)︸ ︷︷ ︸∇ · b=∇(µ ·h)=µ ·∇ ·h=0
= ∇2h− µε∂2h
∂t2−µσ∂h
∂t︸ ︷︷ ︸0
∇2h− µε∂2h
∂t2= 0
∇2e− µε∂2e
∂t2= 0 (analogamente)
1Le sorgenti possono esserci, ma solo esternamente al volume in esame.
5 - Soluzione del problema di Maxwell omogeneo 29

Propagazione L-A CC© BY:© $\© =©
Nella procedura vista si riconosce l’equazione generalizzata delle onde:
∇2h− µε∂2h
∂t2− µσ∂h
∂t= 0
che, poiche il mezzo e privo di perdite (σ = 0), diventa l’equazione vettoriale delle onde:
∇2h− µε∂2h
∂t2= 0
Infatti questa equazione e del tipo:
∇2a− 1c2∂2a
∂t2= 0
che e l’equazione vettoriale delle onde di D’Alembert, dove c =1√µε
, che nel vuoto diventa
c =1
√µ0ε0
' 3 · 108 m/s cioe la velocita della luce nel vuoto.
5.2 Equazioni delle onde nel dominio della frequenza
Dall’equazione generalizzata delle onde:
∇2h− µε∂2h
∂t2− µσ∂h
∂t= 0
in un mezzo lineare e isotropo, in assenza di sorgenti, si ricava la versione analoga coifasori in regime sinusoidale, per studiare l’equazione nel dominio della frequenza.
∇2E + ω2µεE − jωµσE = 0
∇2E + ω2µE
(ε− jω
σ
)︸ ︷︷ ︸
εc
= 0
∇2E + ω2µεcE = 0 e l’equazione di Helmholtz, cioe il corrispondente armonico dell’equa-zione di D’Alembert.
5.3 Soluzione generale dell’equazione di Helmholtz
Si risolve l’equazione euristicamente2. Si comincia separando le variabili: l’equazionecorrisponde alle tre versioni proiettate sugli assi. Per questo, e possibili studiare soloun’equazione.
∇2Ex + ω2µεcEx = 0
Ex = X(x) ·Y (y) ·Z(z) (separazione delle variabili)
Svolgendo il laplaciano:
Y ZX ′′ +XZY ′′ +XY Z ′′ + ω2µεcXY Z = 0
Definiamo ω2µεcdef.= K2 e dividiamo membro a membro l’equazione per XY Z:
X ′′
X+Y ′′
Y+Z ′′
Z= −K2
Con l’ipotesi fatta, i tre addendi devono essere costanti perche la somma sia costante.Operativamente si spezza l’equazione in tre:
X ′′
X= −K2
x
Y ′′
Y= −K2
y
Z ′′
Z= −K2
z
con K2x +K2
y +K2z = K2
2Si pongono equazioni iniziali, che dovranno poi essere confermate.
30 5.2 - Equazioni delle onde nel dominio della frequenza

Propagazione L-A CC© BY:© $\© =©
Poiche le tre equazioni sono tutte uguali, se ne studia una sola.
X(x) = a1 · ejKx · x + a2 · e−jKx · x
Y (y) = b1 · ejKy · y + b2 · e−jKy · y
Z(z) = c1 · ejKz · z + c2 · e−jKz · z
quindi:
Ex = X ·Y ·Z= E0x︸︷︷︸
cost.
· ej(±Kx · x±Ky · y±Kz · z)︸ ︷︷ ︸esp. identici
Poiche gli esponenziali sono formalmente identici (a meno del segno), se ne studia unosolo:
Ex = E0x · e−j(Kx · x+Ky · y+Kz · z)
= E0x · e−jK · r
che rappresenta una tra le equazioni all’equazione di Helmholtz, con:K = Kx · ix +Ky · iy +Kz · iz vettore d’ondar = x · ix + y · iy + z · iz vettore posizione
Si utilizzano le tre equazioni che abbiano la stessa fase (cioe la stessa terna Kx,Ky,Kz):Ex = E0x · e−jK · r
Ey = E0y · e−jK · r
Ez = E0z · e−jK · r
da cui E = E0 · e−jK · r che e una delle soluzioni, con:
E0 = E0x · ix + E0y · iy + E0z · iz ampiezza vettoriale complessa
A questo punto si puo dare un nome a K.
Definizione 16 (Numero d’onda (costante di propagazione)). Kdef.= ω
√µεc. Se il mezzo
e privo di perdite (σ = 0): K ∈ R sempreK ∈ R3 (talvolta)
Il versore k e la direzione d’onda. La variabilita di E0 e k determinano l’arbitrarietadella soluzione.
Si sceglie, per l’analisi, il caso scalare complesso (Kz ∈ C) non privo di perdite:
Ex = E0x · e−jKz · z
Per verificare che si tratti di un’onda bisogna trovare l’espressione corrispondente neldominio del tempo:
ex(z, t) = <Ex · ejωt
= <
|a| · ej∠a · e−αz · e−jβz · ejωt
= |a| · e−αz · <
ej(ωt−βz+∠a)
= |a| · e−αz · cos
−βz − ω
β︸︷︷︸c=vf
t
+ ∠a
= |a| · e−αz · cos
(β
(z − ω
βt
)− ∠a
)∼ a(z, t) = A(z) · f(z − ct)
Quindi si tratta di un’onda sinusoidale, che si propaga attenuandosi lungo l’asse z.
5.3 - Soluzione generale dell’equazione di Helmholtz 31

Propagazione L-A CC© BY:© $\© =©
Definizione 17 (Velocita di fase). vfdef.=
ω
β.
Senza perdite, l’onda si propaga alla velocita della luce (c), infatti quando σ = 0 si ha:
vf =ω
ω√µε
=1√µε
= c
Definizione 18 (Lunghezza d’onda). λ = ∆z =2πβ
.
Allora si puo scrivere, per un mezzo con perdite:
vf =ω
β=
2πf2πλ
= λf
da cui c = λf in un mezzo senza perdite.In precedenza si era definito:
jK = α+ jβ ⇒ K2 = β2 − α2 − 2jαβ
Con σ 6= 0 si ha K ′ = ω√µε, che e diverso da K = ω
√µεc:
K = K ′√εcε
= K ′√
1− j σωε
= K ′√
1− jR
Definizione 19 (Tangente dell’angolo di perdita). Rdef.=
σ
ωε.
Sostituendo opportunamente si ricavano α e β.
Definizione 20 (Costanti di attenuazione e di fase).
α =K ′√
2
√√1 +R2 − 1 costante di attenuazione
β =K ′√
2
√√1 +R2 + 1 costante di fase
Se il mezzo e privo di perdite:
α = 0 , β = K ′ = K = ω√µε =
ω
c
Definizione 21 (Indice di rifrazione). Se il mezzo non e ferromagnetico, cioe se σ = 0 eµ = µ0:
ndef.=√εcε0
5.4 Onde piane uniformi TEM
In generale, purche si abbia µ = µ0, vale:
nβ =√
ε
ε0·ω√µ0ε0 = ω
√µ0ε = K
Con σ = 0 si ottiene:
E = E0 · e−jK · r onda piana uniforme
L’onda e:
piana: la superficie equifase e K · r = cost., cioe un piano ortogonale alla direzione delvettore d’onda;
32 5.4 - Onde piane uniformi TEM

Propagazione L-A CC© BY:© $\© =©
uniforme: l’onda ha ampiezza costante in ogni punto dello spazio e non si attenua.
In assenza di cariche:
∇ ·E = 0∇ ·
(E0 · e−jK · r
)︸ ︷︷ ︸∇ · (A · f)=∇f ·A+f∇ ·A
= ∇(e−jK · r
)·E0 + e−jK · r (∇ ·E0)︸ ︷︷ ︸
0
=(−jK · e−jK · r
)·E0
= 0K︸︷︷︸∈R
· E0︸︷︷︸∈C
= 0
Poiche vale la proprieta di ortogonalita tra vettori, K e E0 sono ortogonali : il vettore egiace sul piano equifase ortogonale alla direzione di propagazione di K.
Studiamo ora la prima equazione di Maxwell:
H = −∇× Ejωµ
∇× E = ∇×(E0 · e−jK · r
)=
(∇× E0
)︸ ︷︷ ︸0
· e−jK · r +∇(e−jK · r
)× E0
=(−jK · e−jK · r
)× E0
= −j · e−jK · r(K × E0
)
⇒ H =−j · e−jK · r
(K × E0
)−jωµ
=ω√µε
ωµ· k × E =
√ε
µk × E =
1ηk × E
Definizione 22 (Impedenza intrinseca del mezzo). η =√µ
εc.
Moltiplicando l’equazione di Maxwell cosı ottenuta per k si ottiene:
H · k =1ηk × E · k︸ ︷︷ ︸
0
= 0 oppure K ·H = 0
quindi il campo magnetico e sempre ortogonale alla direzione di propagazione (si trova sulpiano equifase).
Nel dominio del tempo si aveva:
h(r, t) =1ηk × e(r, t)
h e e sono ortogonali tra loro: allora k, e, h sono una terna ortogonale.
5.4 - Onde piane uniformi TEM 33

Propagazione L-A CC© BY:© $\© =©
Onde piane come soluzioni di Helmholtz
La singola onda piana non e soluzione dell’equazione di Helmholtz, perche trasporta unapotenza infinita: infatti, il vettore di Poynting per le onde piane vale:
S =E ×H∗
2
=12ηE0 · e−jK · r ×
(k × E∗0 · ejK · r
)=
12ηE0 × k × E
∗0
=12η
(E0 ·E∗0
)k −
(E0 · k
)︸ ︷︷ ︸0:E0⊥k
E∗0
=|E0|2
2η· k ∈ R
La potenza e trasportata in direzione k. La soluzione che porta a questi risultati none realistica: il fronte d’onda e infinito, quindi S trasporta potenza infinita e il campoelettromagnetico non ha senso come singola soluzione.
L’onda piana puo essere un elemento della soluzione se ha componenti infinitesime(quindi se e combinata con altre onde piane). Allora si puo usare l’integrale generale delleonde piane:
E =∫ +∞
−∞
∫ +∞
−∞E0(Kx,Ky) · e−j(Kx · x+Ky · y+
√K2−K2
x−K2y · z) dKx dKy
perche K2x +K2
y +K2z = K2 = ω2µεc. In pratica, si sommano infiniti termini di ampiezza
infinitesima, e la somma non da piu potenza infinita.
5.4.1 Riflessione e rifrazione di onde piane
Si ha un problema di Maxwell all’interno di un volume limitato suddiviso in due regionispaziali con caratteristiche diverse (figura 5.1). Si suppone che un’onda piana3 sia soluzionenello spazio 1. Si vuole calcolare il campo elettromagnetico nello spazio 2.
Figura 5.1: Riflessione e rifrazione di un’onda piana uniforme
Le ipotesi di partenza sono:
• assenza di cariche o correnti superficiali nella superficie di separazione;
• µ = µ0 su 1 e 2.3Intesa come sovrapposizione di onde piane infinitesime.
34 5.4 - Onde piane uniformi TEM

Propagazione L-A CC© BY:© $\© =©
Si applicano le equazioni di continuita del campo:Eτ1 = Eτ2Hτ1 = Hτ2 + Js × in︸ ︷︷ ︸
0
Il vettore K incide sulla superficie. Per esperienza si puo supporre che nascano due onde:una riflessa e una trasmessa (rifratta). Allora si scrivono le espressioni delle onde per poiimporre le equazioni di continuita.
Ei = Ei0 · e−jK · r = Ei0 · e−jn1β0si · r onda incidenteEr = Er0 · e−jK · r = Er0 · e−jn1β0sr · r onda riflessaEt = Et0 · e−jK · r = Et0 · e−jn2β0st · r onda trasmessaHi = 1
η1sn × Ei = Hi0 · e−jn1β0si · r onda incidente
Hr = 1η1sr × Er = Hr0 · e−jn1β0sr · r onda riflessa
Ht = 1η2st × Et = Ht0 · e−jn2β0st · r onda trasmessa
Per semplicita e analogia si opera solo sul campo elettrico. La condizione di continuita delcampo elettrico implica la tangenza:
Eiτ + Erτ = Etτ
Considerando la superficie di separazione come un piano di riferimento x = 0, su di essodovra valere:
Ei0τ · e−jn1β0si · r + Er0τ · e
−jn1β0sr · r = Et0τ · e−jn2β0st · r
Il risultato deve essere verificato per ogni valore di y e z sul piano di separazione. Datoche i fattori vettoriali sono costanti, bisogna eguagliare i fattori esponenziali.
n1 · siy = n1 · sry = n2 · styn1 · siz = n1 · srz = n2 · stz
⇒siysiz
=srysrz
=stystz
= m
cioe i tre versori sono complanari sul piano d’incidenza (figura 5.2). I versori hannoespressione:
si = cosϑi · ix + sinϑi · izsr = − cosϑr · ix + sinϑr · izst = cosϑt · ix + sinϑt · iz
Figura 5.2: Riflessione e rifrazione di un’onda piana uniforme: piano d’incidenza
Per comodita, ruotiamo il sistema cosı che i versori giacciano sul piano z. Allora iversori conservano solo la componente z:
n1siz = n1srz = n2stz
Teorema 9 (Legge di riflessione). Gli angoli di incidenza e di riflessione, rispetto allaverticale tracciata nel punto d’incidenza, sono uguali:
n1siz = n1srz ⇒ n1 sinϑi = n1 sinϑr ⇒ ϑi = ϑr
5.4 - Onde piane uniformi TEM 35

Propagazione L-A CC© BY:© $\© =©
Teorema 10 (Legge di Snell). Gli angoli di incidenza e di rifrazione, rispetto allaverticale tracciata nel punto d’incidenza, stanno tra loro in relazione:
n1siz = n2stz ⇒ n1 sinϑi = n2 sinϑt
Definizione 23 (Angolo critico). Quando ϑt = π2 , il valore corrispondente ϑi calcolato
con la legge di Snell determina il minimo angolo di incidenza per il quale c’e riflessionetotale (angolo critico ϑic).
Ora bisogna soddisfare la continuita delle componenti vettoriali e dei campi H:Ei0τ + Er0τ = Et0τHi0τ
+Hr0τ= Ht0τ
(5.4.1)
Nota 5.4.1. Il sistema (5.4.1) non ha 12 incognite (due per ogni addendo), ma solo 6 perche si puoesprimere il campo magnetico in funzione del campo elettrico.
Figura 5.3: Riflessione e rifrazione di un’onda piana uniforme: riferimenti locali
In questo modo si calcola l’ampiezza di onda riflessa e incidente. Per aiutarsi, bisognadefinire dei sistemi di riferimento locali (figura 5.3): in tal modo, il campo magneticoincidente ha componenti solo in direzioni ξi e iy. Quindi le espressioni si semplificano:
ξi = sinϑi · ix − cosϑi · izξr = sinϑi · ix + cosϑi · izξt = sinϑt · ix − cosϑt · iz
⇒
Ei0 = Ei0ξ · ξi + Ei0y · iyEr0 = Er0ξ · ξr + Er0y · iyEt0 = Et0ξ · ξt + Et0y · iy
Il campo magnetico si ricava, come detto, dal campo elettrico:
H =1ηs× E con
1η1
=n1
η0nel mezzo 1
⇒
Hi0 =1η1
Ei0ξ · si × ξi + Ei0y · si × iy︸ ︷︷ ︸−ξi
=n1
η0
[Ei0ξ · iy − Ei0y · ξi
]Hr0 = . . . =
n1
η0
[Er0ξ · iy − Er0y · ξr
]Ht0 = . . . =
n1
η0
[Et0ξ · iy − Et0y · ξt
]Si puo scindere il campo elettromagnetico in due polarizzazioni lineari: una in direzio-ne ξ (componente Trasverso-Magnetica) e una in direzione iy (componente Trasverso-Elettrica).
Nota 5.4.2. I pedici i di campi e versori si possono eliminare, perche le relazioni valgono in tutte ledirezioni, quindi anche nella direzione trasmessa e riflessa.
36 5.4 - Onde piane uniformi TEM

Propagazione L-A CC© BY:© $\© =©
Polarizzazione Trasverso-Elettrico (TE)
Avendo solo la componente TE le equazioni del sistema (5.4.1) diventano:Ei0y + Er0y = Et0yn1
η0Ei0y cosϑi −
n1
η0Er0y cosϑi =
n1
η0Et0y cosϑt
(5.4.2)
Le equazioni sono tutte in funzione di ϑi (utilizzando la legge di Snell), ma spesso siutilizza l’angolo ϑ =
π
2− ϑi che e l’angolo di radenza (o elevazione rispetto alla superficie
di interfaccia).Per semplicita si usano dei rapporti:
ρTEdef.=
Er0yEi0y
coefficiente di riflessione TE
ρTE =sinϑ−
√(n2
n1
)2
− cos2 ϑ
sinϑ+
√(n2
n1
)2
− cos2 ϑ
=cosϑi −
√(n2
n1
)2
− sin2 ϑi
cosϑi +
√(n2
n1
)2
− sin2 ϑi
τTEdef.=
Et0yEi0y
coefficiente di trasmissione TE
τTE =2 sinϑ
sinϑ+
√(n2
n1
)2
− cos2 ϑ
ρTE e τTE dipendono solo dalla geometria del campo incidente e dai materiali del sistemadi Maxwell.
Polarizzazione Trasverso-Magnetico (TM)
Avendo solo la componente TM le equazioni del sistema (5.4.1) diventano piu semplici inH: −Ei0ξ cosϑi + Er0ξ cosϑi = −Et0ξ cosϑt
n1
η0Ei0ξ +
n1
η0Er0ξ =
n2
η0Et0ξ
(5.4.3)
Come nel caso TE, per semplicita si usano dei rapporti:
ρTMdef.=
Er0ξEi0ξ
coefficiente di riflessione TM
ρTM =
(n2
n1
)2
sinϑ−
√(n2
n1
)2
− cos2 ϑ
(n2
n1
)2
sinϑ+
√(n2
n1
)2
− cos2 ϑ
τTMdef.=
Et0ξEi0ξ
coefficiente di trasmissione TM
τTM =2n2
n1sinϑ(
n2
n1
)2
sinϑ+
√(n2
n1
)2
− cos2 ϑ
ρTM e τTM dipendono solo dalla geometria del campo incidente e dai materiali del sistemadi Maxwell.
5.4 - Onde piane uniformi TEM 37

Propagazione L-A CC© BY:© $\© =©
Si possono scrivere delle relazioni matriciali tra le componenti del campo elettrico (vet-tori del campo incidente e del campo riflesso/trasmesso) e i coefficienti TE e TM (inseritiin una matrice diagonale), separando il caso della riflessione da quello della trasmissione:[
ETErETMr
]=[ρTE 0
0 ρTM
]·[ETEiETMi
][ETEtETMt
]=[τTE 0
0 τTM
]·[ETEiETMi
]
38 5.4 - Onde piane uniformi TEM

CAPITOLO 6
Problema non omogeneo
Il problema di Maxwell e non omogeneo in presenza di sorgenti J i (correnti impresse), chesi trovano nei conduttori (emittenti). In un mezzo omogeneo, normale e privo di perdite,l’unica equazione che cambia rispetto al caso omogeneo e la seconda:
∇× E = −jωµH∇×H = jωεcE + J i
∇ ·E =ρ
ε∇ ·H = 0
In maniera analoga a quanto visto per il caso omogeneo si potrebbe operare disaccoppiandole equazioni di Maxwell.
I) ∇× (∇× E) = ∇× (−jωµH)∇×∇× E = −jωµ∇×H
∇2E + ω2µεcE = jωµJ i −∇(∇ · J i)jωε
II) ∇2H + ω2µεcH = −∇× J i
Giunti a questo punto non si puo procedere oltre: le sorgenti usuali sono linee oppu-re superfici, dunque le loro derivate sono singolarita (infiniti). Le discontinuita dei casinon tridimensionali rendono inadatta la forma dell’equazione per risolvere tutti i possibiliproblemi.
6.1 Soluzione delle equazioni di Maxwell attraversol’uso del potenziale vettore
Si opera partendo dalla quarta equazione di Maxwell. E noto, per le proprieta del calcolovettoriale:
∇ · (∇×A) = 0 ∀A (vettore)
∇× (∇φ) = 0 ∀φ (scalare)
Se H viene espresso come rotore di un opportuno campo A, allora si puo scrivere:
B = ∇×A ⇒ H =1µ∇×A
dove A e il potenziale vettore magnetico. Se si puo scrivere l’equazione in questa forma,allora essa e verificata. Procedendo oltre:
∇× E = −jωµH = −jω∇×A
6 - Problema non omogeneo 39

Propagazione L-A CC© BY:© $\© =©
∇× (E + jωA) = 0
Cio significa che il campo E + jωA e irrotazionale, quindi si puo scrivere come gradientedi una quantita scalare:
E = −jωA−∇φ
dove φ e il potenziale scalare elettrico.Utilizzando anche il numero d’onda K si puo ripartire da quanto calcolato prima:
∇×∇× E = ω2µεcE − jωµJ i∇×∇× (−jωA−∇φ) = ω2µεc(−jωA−∇φ)− jωµJ i
−jω∇×∇×A = ω2µεc(−jωA−∇φ)− jωµJ i∇×∇×A−K2A = µJ i − jωµεc · ∇φ
∇2A+K2A−∇(∇ ·A+ jωµεcφ) = −µJ i
Il problema che insorge e dovuto alla infinita di A corrispondenti a B e di φ corrispondentia E. Dati A e φ si possono costruire A
′e φ′, che forniscono gli stessi campi E,H dei
potenziali originari: A′
= A+∇χφ′ = φ− jωχ
χ e un campo scalare arbitrario, che si usa per semplificare il calcolo.
Definizione 24 (Potenziali di Lorentz). Hendrik Antoon Lorentz scelse:
∇ ·A = −jωµεcφ (scelta di Lorentz)
Se l’equazione e vera, allora A e φ sono potenziali di Lorentz.
Con la scelta di Lorentz si ottiene, come equazione risolvente:
∇2A+K2A = −µJ i equazione di Helmholtz non omogenea
Fortunatamente, le derivate della corrente non esistono. Si puo proiettare l’equazionesulle coordinate spaziali e risolverla nella generica coordinata α, infatti il comportamentoe analogo in tutte le coordinate:
∇2A = ∇2Axix +∇2Ay iy +∇2Az iz
∇2Aα +K2Aα = −µJiα , α = x, y, z
∇2Aα(P )− σ2Aα(P ) = −µJiα(P ) , σ = jK
Si considera un volumetto infinitesimo dV con una corrente impressa costante al suo internoe nulla all’esterno (elemento infinitesimo di corrente). Per semplicita, tale situazione puoessere semplificata riconducendosi ad un impulso di Dirac in corrente, nel punto P0:
−µ · Jiα(P ) = δ(P − P0)
per cui l’equazione di prima diventa:
∇2G(P, P0)− σ2G(P, P0) = δ(P − P0)
G e la funzione di Green: e equivalente a Aα, ma al secondo membro ha l’impulso di Dirac(definito tridimensionalmente).
Definizione 25 (Delta di Dirac tridimensionale). Si estende la delta di Dirac al dominiotridimensionale definendo:
δ(P − P0)def.=
0, per P 6= P0∫D
δ(P − P0) dV = 1, su P0 ∈ D
dove D e una regione di dominio, entro la quale e presente il punto P0.
40 6.1 - Soluzione delle equazioni di Maxwell attraverso l’uso del potenziale vettore

Propagazione L-A CC© BY:© $\© =©
I punti P e P0 sono rispettivamente il punto potenziato (dove si vuole calcolare il campo)e potenziante (dove e localizzato l’impulso di corrente). Il sistema ha una simmetria sferica(dipende dalla distanza r tra P e P0), quindi:
∇2G(r)− σ2G(r) = δ(r)
Se e valida la condizione di radiazione, allora il campo elettromagnetico decade all’infinito:
limr→∞
r ·G(r) = 0 ⇒ E∞ = 0 , H∞ = 0
e la funzione di Green scelta e quella di spazio libero. L’attenuazione totale del campoelettromagnetico ai limiti e assunta come condizione al contorno, da imporre ogni voltaper avere unicita della soluzione.
6.1.1 Soluzione dell’equazione di Green
Bisogna distinguere il caso in cui e nulla la delta di Dirac da quello in cui assume valore.
Soluzione dell’equazione di Green con P 6= P0
L’equazione diventa:∇2G(r)− σ2G(r) = 0
Risolvendo il laplaciano in coordinate sferiche:
1r· d
2
dr2G(r)− σ2G(r) = 0 ⇒ d2
dr2
(r ·G(r)
)− σ2rG(r) = 0
Chiamando Z(r)def.= rG(r):
d2
dr2Z(r)− σ2Z(r) = 0
L’equazione differenziale ha una soluzione del tipo:
Z(r) = A · e−σr +B · e+σr
Se si sostituisce σ e si impongono le condizioni di radiazione, si ricava che B = 0, cioeZ(r) = A · e−σr:
rG(r) = A · e−σr ⇒ G(r) =A · e−σr
r= A · e
−σ|P−P0|
|P − P0|
che e la soluzione che ci interessa. Bisogna, pero, determinare la costante A.
Soluzione dell’equazione di Green con P0 ∈ D
Siccome: ∫∫∫D
δ(P − P0) dV = 1 ⇒∫∫∫
D
(∇2G− σ2G) dV = 1
allora: ∫∫∫D
(∇2G− σ2G) dV =∫∫∫
DR
(∇2G− σ2G) dV
= limR→0
∫∫∫DR
(∇2G− σ2G) dV
= limR→0
∫∫∫DR
∇2GdV︸ ︷︷ ︸a
− limR→0
∫∫∫DR
σ2GdV︸ ︷︷ ︸b
(6.1.1)
= 1
6.1 - Soluzione delle equazioni di Maxwell attraverso l’uso del potenziale vettore 41

Propagazione L-A CC© BY:© $\© =©
L’equazione (6.1.1-b) diventa:
limR→0
∫∫∫DR
σ2GdV = limR→0
∫∫∫DR
σ2Ae−σr
rdV
= limR→0
∫ R
0
∫ π
0
∫ 2π
0
σ2Ae−σr
r· r2 sinϑ dϑ dϕdr
= limR→0
∫ R
0
σ2Ae−σr
r·[∫ π
0
∫ 2π
0
r2 sinϑ dϑ dϕ]
︸ ︷︷ ︸4πr2
dr
= σ2A limR→0
∫ R
0
e−σr
r· 4πr2 dr
= 4πσ2A limR→0
∫ R
0
e−σr · r dr
= (per parti) 4πσ2A limR→0
(−Re
−σR
σ− e−σR
σ2+
1σ2
)= 0
Rimane solo l’equazione (6.1.1-a):
limR→0
∫∫∫DR
∇2GdV = limR→0
∫∫∫DR
∇ · (∇G) dV
= (teorema di Gauss) limR→0
∫∫SR
∇G · ir dS
= limR→0
∫∫SR
dG
drdV
= limR→0
∫ π
0
∫ 2π
0
dG
dr· r2 dϑ dϕ
= limR→0
dG
dr
∣∣∣∣r=R
·∫ π
0
∫ 2π
0
r2 dϑ dϕ︸ ︷︷ ︸4πR2
= limR→0
A
[−σe−σr
r− e−σr
r2
]r=R
· 4πR2
= −4πA limR→0
(+σe−σR
R+e−σR
R2
)·R2
= −4πA limR→0
(Rσe−σR + e−σR
)= −4πA
Riepilogando, dalla 6.1.1 si ottiene:
limR→0
∫∫∫DR
∇2GdV︸ ︷︷ ︸−4πA
− limR→0
∫∫∫DR
σ2GdV︸ ︷︷ ︸0
= 1 ⇒ A = − 14π
Concludendo, G(r) per essere soluzione dell’equazione di Green deve essere del tipo:
G(r) = − 14π
e−σ|P−P0|
|P − P0|= − 1
4πe−σ|r−r0|
|r − r0|
6.1.2 Soluzione deduttiva dell’equazione di Helmholtz
Analizziamo, ad esempio: ∇2Ax + K2Ax = −µJix . L’equazione ammette soluzioni. Inparticolare, nel caso del bipolo infinitesimo di corrente:
∇2A+K2A = −µJi · δ(P − P0) dV0 con Ji =
costante, in dV0, altrove
42 6.1 - Soluzione delle equazioni di Maxwell attraverso l’uso del potenziale vettore

Propagazione L-A CC© BY:© $\© =©
La soluzione e A = G(r) = G(P, P0):
G(r) =µ
4π· e−jK · r
r· Jx dV
che ha una singolarita nell’origine (r = 0). Generalizzando:
A =µ
4π· e−jK · r
r· J i dV
6.1.3 Soluzione ufficiale dell’equazione di Helmholtz
In maniera piu rigorosa si puo scrivere, assumendo P fisso e P0 come variabile indipendente:∇2P0A(P0)− σ2A(P0) = −µ · Ji(P0)︸ ︷︷ ︸
s(P0)
∇2P0G(P, P0)− σ2G(P, P0) = δ(P − P0)
Si moltiplica la prima equazione per G e la seconda per A, poi si sottrae membro a membroper eliminare il termine σ2A(P0) ·G(P, P0):
A(P0) · δ(P − P0) = −s(P0) ·G(P, P0) +A(P0) · ∇2P0G(P, P0)−G(P, P0) · ∇2
P0A(P0)
Si integrano ambo i membri sul volume Ve, che contiene il punto potenziato P :∫∫∫Ve
A(P0) · δ(P − P0) dV0︸ ︷︷ ︸A(P )
= −∫∫∫
Ve
G · s(P0) dV0 +∫∫∫
Ve
[A(P0) · ∇2
P0G−G · ∇2
P0A(P0)
]dV0
A(P ) = −∫∫∫
Ve
G · s(P0) dV0 +∫∫∫
Ve
∇P0 [A(P0) · ∇P0G−G · ∇P0A(P0)] dV0︸ ︷︷ ︸(teorema di Gauss)
A(P ) = −∫∫∫
Ve
G · s(P0) dV0 +∫∫
Se
[A(P0) · ∇P0G−G · ∇P0A(P0)] · in dS0
Quando si fa tendere Ve e Se all’infinito (Ve → V∞, Se → S∞), si vede che le funzionidell’integrale ricavato col teorema di Gauss decadono all’infinito e, quindi, l’integrale tendea 0. Rimane allora:
A(P ) = −∫∫∫
V∞
G · s(P0) dV0
= −∫∫∫
V∞
−µ · Ji(P0) ·(− 1
4πe−σ|P−P0|
|P − P0|
)dV0
=µ
4π
∫∫∫V∞
Ji(P0) · e−σ|r−r0|
|r − r0|dV0
Se le J i sono solo in una regione limitata V0, l’integrale e in parte nullo e si puo scrivere:
A(P ) =µ
4π
∫∫∫V0
J i(P0) · e−σ|r−r0|
|r − r0|dV0
che, in caso di sorgente superficiale, puo essere adattato a:
A(P ) =µ
4π
∫∫S0
J i(P0) · e−σ|r−r0|
|r − r0|dS0
6.1 - Soluzione delle equazioni di Maxwell attraverso l’uso del potenziale vettore 43

CAPITOLO 7
Radiazione
7.1 Momento della sorgente
Generalizzando, se l’elemento infinitesimo non e nell’origine, e sufficiente traslare la solu-zione. Indicando con r′ il vettore posizione del bipolo si puo estendere:
A(r, r′) =µ
4π· e−jK · |r−r′|
|r − r′|· J i dV︸ ︷︷ ︸
M
=µ
4π·M · e
−jK · |r−r′|
|r − r′|
M e il momento della sorgente nel caso del bipolo infinitesimo. Avendo elementi infinite-simi di superficie o di lunghezza cambia solo la definizione di M :
M = Js dS , M = I dl
Definizione 26 (Potenziale esteso di una sorgente). Per una sorgente estesa:
A(r, r′) =µ
4π
∫∫∫V ′J i(r′)
e−jK · |r−r′|
|r − r′|dV ′
dove r e il punto potenziato e r′ il punto potenziante.
7.2 Campi reattivi e campi radiativi
Gli elementi infinitesimi di corrente hanno tutti momento M = M · iz. Con un sistema diriferimento sferico si puo riscrivere:
iz = cosϑ · ir − sinϑ · iϑ
Si calcola il campo H:
H =1µ∇×A , A =
µ
4πMz iz
e−jKr
r
Il rotore di A si annulla in parte:
∇×A = ∇× (Az · iz) = Az · ∇ × iz︸ ︷︷ ︸0
+∇Az × iz
44 7 - Radiazione

Propagazione L-A CC© BY:© $\© =©
Il gradiente di Az e la derivata in r (Az dipende solo da r):
∇Az =∂Az∂r
=µ
4πMz ·
∂
∂r
(e−jKr
r
)ir
= − µ
4πMz
(jK +
1r
)e−jKr
rir
Calcolare ∇Az × iz significa fare il prodotto tra i versori:
ir × iz = ir × (cosϑ · ir − sinϑ · iϑ)= ir × (− sinϑ) · iϑ= (− sinϑ) · (ir × iϑ)= − sinϑ · iϕ
Concludendo:
H =Mz
4π
(jK +
1r
)e−jKr
rsinϑ · iϕ = Hϕ · iϕ
Si nota che il campo magnetico H ha componente soltanto nella direzione ϕ.Dalla seconda equazione di Maxwell si puo ricavare il campo elettrico:
E =∇×Hjωεc
=1
jωεc·Mz
2π
(jK +
1r
)e−jKr
r2cosϑ · ir +
1jωεc
·Mz
4π
((jK)2 +
jK
r+
1r2
)e−jKr
rsinϑ · iϑ
= Er · ir + Eϑ · iϑ
In un mezzo privo di perdite si ha K = β = 2πλ . Riscrivendo le espressioni di E e H e
possibile trovare delle relazioni in due casi specifici.
Definizione 27 (Campo vicino rispetto a λ (reattivo)). Quando r λ le espressioni sisemplificano:
H =Mz
4πr2sinϑ · iϕ
E = −j√µ
ε· Mz
4π2
λ
r3cosϑ · ir − j
õ
ε· Mz
8π2
λ
r3sinϑ · iϑ
I campi perdono il fattore di fase ejβr, quindi non si tratta di un’onda che si propaga: eun campo presente solo nelle immediate vicinanze dell’antenna, perche si attenuta rapi-damente a breve distanza. Il campo e reattivo perche emette solo potenza reattiva (nontrasmette potenza utile).
Definizione 28 (Campo lontano rispetto a λ (radiativo)). Quando r λ le espressionisi semplificano ulteriormente:
H = jMz
2λsinϑ
ejβr
r· iϕ
E = jη
2λMz sinϑ
ejβr
r· iϑ
Il campo E perde la componente radiale ir, mentre il campo H e un’onda sferica. Si trattadi un’onda che si propaga, con attenuazione blanda. Il campo e radiativo perche emettepotenza attiva (trasmette potenza utile).
7.2 - Campi reattivi e campi radiativi 45

Propagazione L-A CC© BY:© $\© =©
7.2.1 Campo lontano rispetto a λ
Sotto le ipotesi di campo lontano (r λ) si possono scrivere le seguenti espressioni delcampo elettromagnetico:
A =µ
4πMz
ejβr
r
E = jη
2λMz sinϑ
ejβr
riϑ = Eϑ(ϑ) · iϑ
H = j1
2λMz sinϑ
ejβr
riϕ = Hϕ(ϑ) · iϕ =
1ηir × E
Questo campo elettromagnetico e simile a quello di un’onda piana: e un’onda sferica chesi comporta, localmente, come se fosse piana.
Teorema 11. Il campo elettrico e la componente tangente del momento della sorgentesono uguali, a meno di una costante complessa.
Dimostrazione. Si calcola la componente tangente del momento della sorgente:
−jω ·At = −jω(ir ×A× ir)
= −j ω µ
4π︸︷︷︸η2λ
ejβr
r(ir ×M × ir)︸ ︷︷ ︸
Mt
= −j η2λMz
ejβr
rir × iz︸ ︷︷ ︸−iϕ sinϑ
×ir
= +jη
2λMz
ejβr
rsinϑ · iϕ × ir
= +jη
2λMz
ejβr
rsinϑ · iϑ
= E
7.2.2 Bipolo infinitesimo di corrente
Con il metodo di Green sono state risolte le equazioni di Maxwell nel caso non omogeneo.Il bipolo infinitesimo e un caso particolare, costituito da una regione di volume infinitesimoin cui e presente una corrente impressa. Poiche il bipolo e posizionato in direzione z, sarapresente solo questa componente nelle espressioni del campo elettromagnetico:
Mz = Ji · iz dV ′
dove Ji · iz e l’elemento intensivo, mentre la lunghezza dV ′ e l’elemento estensivo.Calcoliamo il flusso del vettore di Poynting attraverso la superficie sferica S di raggio
R, centrata nell’origine:
PCS = PS + jQS =∫∫
S
E ×H∗
2· ir dS
=∫∫
S
Eϑ ·H∗ϕ2
· ir dS
=∫ 2π
0
∫ π
0
Eϑ ·H∗ϕ2
· r2 sinϑ dϑ dϕ
=ηπ
3
(Mz
λ
)2(1− j λ3
8π3r3
)
46 7.2 - Campi reattivi e campi radiativi

Propagazione L-A CC© BY:© $\© =©
In generale, E ha componenti Eϑiϑ (trasversa) e Er ir (radiale), mentre H ha solo la com-ponente Eϕiϕ. Il prodotto tra queste componenti genera prodotti misti che si annullano,lasciando solo le componenti trasverse. In definitiva si ottiene:
PS =ηπ
3
(Mz
λ
)2
QS =ηπ
3
(Mz
λ
)2(− λ3
8π3r3
)= PS ·
(− λ3
8π3r3
)Si nota che QS , avendo al denominatore il fattore r3, si attenua molto velocemente con ladistanza: quindi, questa potenza sara presente solo nel campo vicino.
Nel caso di campo lontano si puo semplificare:
PCS =∫ 2π
0
∫ π
0
Eϑ ·H∗ϕ2
· r2 sinϑ dϑ dϕ
=∫ 2π
0
∫ π
0
[η
2
(Mz
2λ
)2 1r2
sin2 ϑ
]· r2 sinϑ dϑ dϕ
=η
2
(Mz
2λ
)2 ∫ 2π
0
∫ π
0
sin3 ϑ dϑ︸ ︷︷ ︸43
dϕ
=η
2
(Mz
2λ
)2 ∫ 2π
0
43dϕ
=η
2
(Mz
2λ
)2 43· 2π
=ηπ
3
(Mz
λ
)2
Il campo lontano e quello che da il contributo alla potenza attiva, mentre il campo vicino(reattivo) e quello che da il contributo alla potenza reattiva.
7.2 - Campi reattivi e campi radiativi 47

Propagazione L-A CC© BY:© $\© =©
7.3 Momento equivalente di un’antenna estesa
Nota 7.3.1. A grande distanza si approssima l’antenna come puntiforme. In tali condizioni si puoesprimere:
E = −jω(ir ×A× ir) , H =1
ηin × E
Figura 7.1: Antenna estesa
Prima di calcolare il campo di un’antenna estesa (figura 7.1), si calcola il parametromomento equivalente agendo sul potenziale vettore esteso A nella sua definizione integrale:
A(r, r′) =µ
4π
∫∫∫V ′J i(r′)
e−σ · |r−r′|
|r − r′|dV ′
Si cerca un metodo per semplificare l’integrale secondo le ipotesi di campo lontano rispettoalla sorgente e rispetto alla dimensione D dell’antenna:
r λ , r r′ , r D ' max|r′|
Si puo considerare l’antenna come puntiforme e ricondursi al caso del bipolo infinitesimo,semplificando:
e−σ · |r−r′|
|r − r′|=
e−σr
r· r
|r − r′|︸ ︷︷ ︸1
· e−σ(|r−r′|−r)︸ ︷︷ ︸r−r′ cos Ψ+r · o( r′r )2
• Il primo fattore e il fattore di propagazione, che e intoccabile.
• Il secondo fattore da contributo 1 perche r′ e trascurabile.
• Il terzo fattore ha esponente calcolabile col teorema del coseno di Carnot:
|r − r′| =√r2 + r′2 − 2rr′ cos Ψ
rr′=
√√√√r2
(1 +
(r′
r
)2
− 2r′
rcos Ψ
)
' r
[1− r′
rcos Ψ + o
(r′
r
)2]
= r − r′ cos Ψ + r · o(r′
r
)2
48 7.3 - Momento equivalente di un’antenna estesa

Propagazione L-A CC© BY:© $\© =©
Ritornando ai fattori esponenziali:
e−σr
r· e−σ(|r−r′|−r) =
e−σr
r· e−σ„r−r′ cos Ψ+r · o
“r′r
”2−«
=e−σr
r· e−σ„−r′ · ir+r · o
“r′r
”2«
=e−σr
r· e+σr′ · ir · e−σr · o
“r′r
”2︸ ︷︷ ︸e trascurabile?
L’ultimo esponenziale e trascurabile (cioe vale 1) solo in alcuni casi; dato che ha esponentemolto piccolo, e possibile esprimerlo in serie di Taylor:
e−σr · o
“r′r
”2
' 1− σr · o(r′
r
)2
= 1
che, in un mezzo privo di perdite, diventa:
−jβr(r′
r
)2
1 ⇒ j2πλ
r′2
r 1 ⇒ r 2πD2
λ
Quando vale questa relazione, allora l’esponenziale e trascurabile e l’integrale iniziale puoessere semplificato:
e−σr
r· e−σ(|r−r′|−r) =
e−σr
r· e+σr′ · ir
⇒ A(r) =µ
4π
∫∫∫V ′J i(r′)
e−σr
r· e+σr′ · ir dV ′
=µ
4πe−σr
r
∫∫∫V ′J i(r′) · e+σr′ · ir dV ′
=µ
4πe−σr
r·M(ϑ, ϕ)
Definizione 29 (Momento equivalente). Il momento equivalente di un’antenna estesa euna grandezza, dipendente solo dalla direzione con cui viene osservata l’antenna (coordi-nate angolari del punto potenziato P ), che riassume tutte le proprieta di radiazione del-l’antenna, compresa l’intensita di radiazione in funzione della direzione e la polarizzazionedel campo emesso. E definito in condizioni di campo lontano:
r λ r D r 2D2
λ
A meno di un fattore (che dipende da mezzo, lunghezza d’onda e distanza), se e noto ilmomento equivalente si puo calcolare il campo elettromagnetico generato dall’antenna, inogni punto per cui sono soddisfatte le condizioni di campo lontano.
7.3.1 Campo elettromagnetico di un’antenna estesa
Il momento equivalente non e piu una costante, come era il momento della sorgente, madipende dalle coordinate angolari: sotto opportune condizioni (di campo lontano e diassenza di perdite), pero, si riottengono le medesime equazioni del campo lontano per il
7.3 - Momento equivalente di un’antenna estesa 49

Propagazione L-A CC© BY:© $\© =©
bipolo infinitesimo. Calcoliamo, allora, il campo elettromagnetico di un’antenna estesa.
H =1µ∇×A
=1
4π∇(e−σr
r
)×M(ϑ, ϕ) +
14π
(e−σr
r
)∇×M(ϑ, ϕ)
=1
4π
(−σ − 1
r
)e−σr
r· ir ×M(ϑ, ϕ) + o
(1r2
)=
14π
(−σ e
−σr
r· ir)×M(ϑ, ϕ)
= −j β4πir ×M(ϑ, ϕ)
e−σr
r
= −j βµir ×
(µ
4πM(ϑ, ϕ)
e−σr
r
)︸ ︷︷ ︸
A
Il campo H ha la stessa espressione definita per l’elemento infinitesimo di corrente, conl’unica differenza che ora M non e costante ma equivalente. Dimostriamo che valgono tuttele relazioni gia ricavate nel caso infinitesimo, cioe che il momento equivalente definisce lecaratteristiche di radiazione dell’antenna indipendentemente dalla distanza e dalle altrecaratteristiche fisiche:
H = −j βµir ×A
= −j βµir ×
(An · in +At
)= −j β
µAn · ir × in︸ ︷︷ ︸
0
−j βµir ×At
= −j βµir ×At (contribuisce solo la comp. tangente)
= −j ωηir ×
(ir ×A× ir
)=
1ηir ×
[−jω
(ir ×A× ir
)]︸ ︷︷ ︸
E
=1ηir × E
cioe vale ancora la relazione tra H ed E tipica delle onde piane, anche nel caso noninfinitesimo.
7.3.2 Momento equivalente su sistema di riferimento traslato
Supponiamo che il sistema di riferimento sia traslato di una distanza l, tale che il puntopotenziato P sia ancora lontano rispetto al nuovo sistema di riferimento (figura 7.2):
r, rn D , r, rn l
Per il nuovo SdR si puo scrivere:
M0n(ϑ, ϕ) =∫∫∫
V ′J i(r′n) · eσr
′n · irn dV ′
con: r′n = r′ − l e rn = r − l.
50 7.3 - Momento equivalente di un’antenna estesa

Propagazione L-A CC© BY:© $\© =©
Figura 7.2: Antenna estesa: traslazione del sistema di riferimento
Allora si puo sviluppare:
r′n · irn =r′n · rnrn
=1rn
(r′ − l
) (r − l
)=
1rnr′ · r − 1
rnr′ · l − 1
rnl · r +
1rnl2
(rn,r′n)→∞=
r
rn︸︷︷︸1
r′ · ir −1rnr′ · l︸ ︷︷ ︸0
− r
rn︸︷︷︸1
l · ir +l2
rn︸︷︷︸0
' r′ · ir − l · ir
Allora e evidente la relazione tra il momento equivalente del sistema centrato nell’originedegli assi e quello del sistema traslato:
M0n(ϑ, ϕ) = e−σl · ir ·M0(ϑ, ϕ)
7.3.3 Potenza irradiata e superficie di radiazione
Il vettore di Poynting di un’antenna estesa ha espressione:
S =E ×H∗
2=
12E ×
(1ηir × E∗
)=
12ηE × ir × E ∗
=12η
[(E ·E∗)ir − (E · ir)E∗
]=|E|2
2ηir
Un’antenna estesa ha espressioni di E, H, S uguali a quelle di un’onda piana, anche sel’onda non e piana. Infatti la superficie equifase e:
Ex = E0x ·e−jβr
r
⇒ fase: α = jβr + ∠E0x(ϑ, ϕ) = cost. ⇒ r =cost.− ∠E0x(ϑ, ϕ)
jβ
La fase di E0x dipende da ϑ e da ϕ, quindi non e una vera onda sferica. Se la variazionetra i valori massimo e minimo di ∠E0x(ϑ, ϕ) e piccola (cioe se la fase di E e stazionaria),
7.3 - Momento equivalente di un’antenna estesa 51

Propagazione L-A CC© BY:© $\© =©
allora la superficie equifase e una sfera:
∆r =∣∣∣∣cost.− ∠E0x(ϑ, ϕ)min
jβ−cost.− ∠E0x(ϑ, ϕ)max
jβ
∣∣∣∣=
∣∣∣∣∠E0xmax − ∠E0xmin
jβ
∣∣∣∣La potenza dell’antenna estesa e calcolabile come flusso del vettore di Poynting, conside-rando una superficie sferica S di raggio r:
PS = Pirr =∫∫
S
|E|2
2ηir · in dS
=∫∫
Sr
|E|2
2ηir · ir dSr
=∫∫
Sr
|E|2
2ηdSr
=∫∫
S
|E0|2
2η · r2dS
(dS = r2 sinϑ dϑ dϕ)
=∫ π
0
∫ 2π
0
|E0|2
2η · r2· r2 sinϑ dϑ dϕ
=∫ π
0
∫ 2π
0
|E0|2
2η· sinϑ dϑ dϕ
=∫
4π
|E0|2
2ηdΩ (su tutto l’angolo solido)
(dΩ =dS
r2[sr] angolo solido (figura 7.3))
Figura 7.3: Angolo solido
La densita di potenza e:
S(r, ϑ, ϕ) = |S| = |E|2
2η=|E0|2
2ηr2
[Wm2
]Definizione 30 (Intensita di radiazione). Ir(ϑ, ϕ) = S · r2 =
|E0|2
2η
[Wsr
].
Allora la potenza irradiata puo essere espressa come:
Pirr =∫ π
0
∫ 2π
0
Ir(ϑ, ϕ) sinϑ dϑ dϕ =∫
4π
Ir dΩ
Definizione 31 (Intensita di radiazione normalizzata).
ir(ϑ, ϕ) =Ir(ϑ, ϕ)
Irmax(ϑmax, ϕmax)=
∣∣E0(ϑ, ϕ)∣∣2∣∣E0(ϑmax, ϕmax)∣∣2 =
∣∣E(r, ϑ, ϕ)∣∣2∣∣E(r, ϑmax, ϕmax)∣∣2
52 7.3 - Momento equivalente di un’antenna estesa
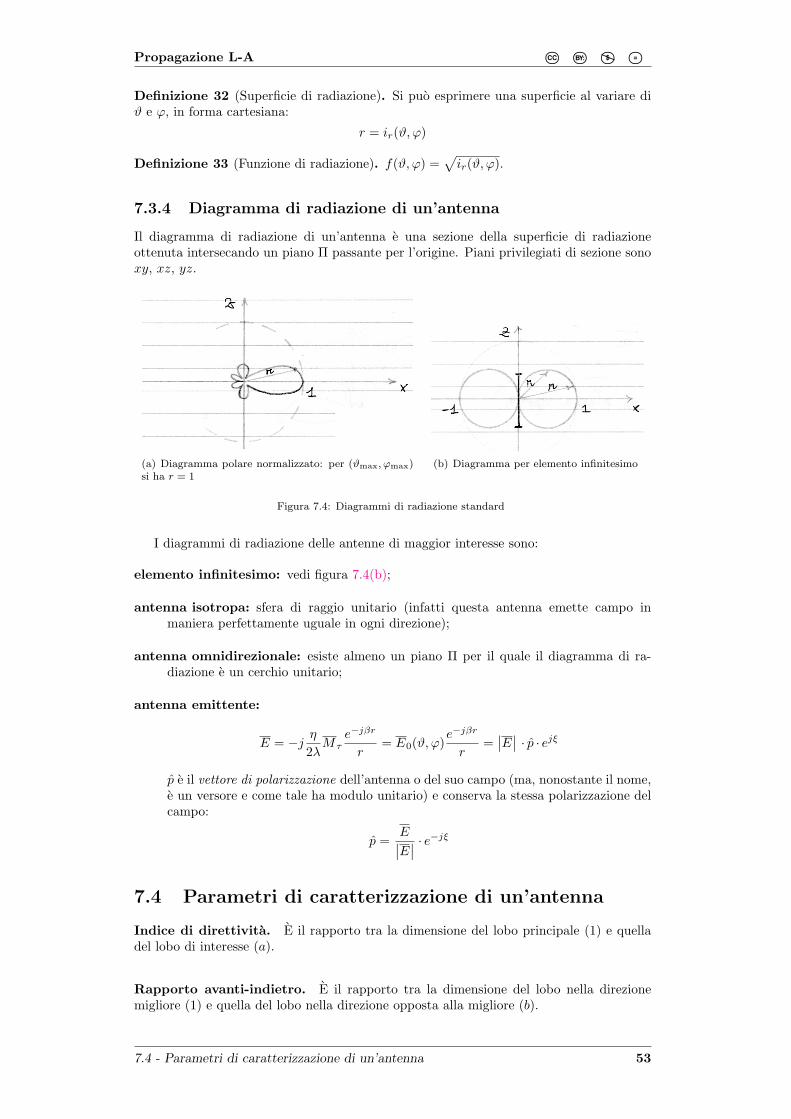
Propagazione L-A CC© BY:© $\© =©
Definizione 32 (Superficie di radiazione). Si puo esprimere una superficie al variare diϑ e ϕ, in forma cartesiana:
r = ir(ϑ, ϕ)
Definizione 33 (Funzione di radiazione). f(ϑ, ϕ) =√ir(ϑ, ϕ).
7.3.4 Diagramma di radiazione di un’antenna
Il diagramma di radiazione di un’antenna e una sezione della superficie di radiazioneottenuta intersecando un piano Π passante per l’origine. Piani privilegiati di sezione sonoxy, xz, yz.
(a) Diagramma polare normalizzato: per (ϑmax, ϕmax)si ha r = 1
(b) Diagramma per elemento infinitesimo
Figura 7.4: Diagrammi di radiazione standard
I diagrammi di radiazione delle antenne di maggior interesse sono:
elemento infinitesimo: vedi figura 7.4(b);
antenna isotropa: sfera di raggio unitario (infatti questa antenna emette campo inmaniera perfettamente uguale in ogni direzione);
antenna omnidirezionale: esiste almeno un piano Π per il quale il diagramma di ra-diazione e un cerchio unitario;
antenna emittente:
E = −j η2λMτ
e−jβr
r= E0(ϑ, ϕ)
e−jβr
r=∣∣E∣∣ · p · ejξ
p e il vettore di polarizzazione dell’antenna o del suo campo (ma, nonostante il nome,e un versore e come tale ha modulo unitario) e conserva la stessa polarizzazione delcampo:
p =E∣∣E∣∣ · e−jξ
7.4 Parametri di caratterizzazione di un’antenna
Indice di direttivita. E il rapporto tra la dimensione del lobo principale (1) e quelladel lobo di interesse (a).
Rapporto avanti-indietro. E il rapporto tra la dimensione del lobo nella direzionemigliore (1) e quella del lobo nella direzione opposta alla migliore (b).
7.4 - Parametri di caratterizzazione di un’antenna 53

Propagazione L-A CC© BY:© $\© =©
Figura 7.5: Diagramma di radiazione: parametri d’antenna
Guadagno in direttivita (d).
d =1
14π
∫4π
ir dΩ(intensita di radiazione normalizzata)
=4π∫
4π
ir dΩ(angolo di apertura del lobo principale, in steradianti)
=4πΩA
Quando d = 1, cioe ΩA = 4π, allora l’antenna e isotropa.Si puo esprimere d in decibel riferiti all’isotropa (dBi):
d [dBi] = 10 · log d
Potenza irradiata dall’antenna isotropa equivalente (P0).
d =4π∫
4πir dΩ
(intensita di radiazione normalizzata)
=4π∫
4π
Ir(ϑ, ϕ)Irmax
dΩ
=4π · Irmax∫
4π
Ir(ϑ, ϕ) dΩ
=4π · Irmax∫ π
0
∫ 2π
0
Ir(ϑ, ϕ) · sinϑ dϑ dϕ
=P0
Pirr
Guadagno in potenza (G). La potenza trasmessa all’antenna PT e sempre maggio-re della potenza effettivamente irradiata Pirr, perche c’e una quota di potenza persasull’antenna (effetto Joule, eccetera).
G =P0
PT=
P0
Pirr + Pdiss
E sempre verificato che G < d.
Rendimento (δ).
δ =PirrPT
=Pirr
Pirr + Pdiss
54 7.4 - Parametri di caratterizzazione di un’antenna

Propagazione L-A CC© BY:© $\© =©
Allora si puo scrivere:
G =PirrPirr
· P0
Pirr + Pdiss= δ · d
Costruiamo l’equivalente circuitale dell’antenna trasmittente (figura 7.6).
Figura 7.6: Antenna trasmittente e potenze associate
1. Si elimina Xi.
2. Si adatta Ri a Rg per avere il massimo trasferimento di potenza:
PT =|V |2
8Rpotenza disponibile
3. Si suddivide Ri in:
Ri = Rdiss +Rirr =V
I
dove Rdiss e la resistenza equivalente degli effetti dissipativi dell’antenna, mentreRirr e la resistenza equivalente degli effetti radiativi dell’antenna:
Pdiss =12Rdiss|I|2 , Pirr =
12Rirr|I|2
Allora:δ =
RirrRirr +Rdiss
Area efficace (Aeff). Costruiamo l’equivalente circuitale dell’antenna ricevente (figu-ra 7.7).
Figura 7.7: Antenna ricevente e potenze associate
Analogamente al caso del rendimento si puo scrivere:
Rg = Rdiss +Rcapt︸ ︷︷ ︸Rirr
In situazione ottima (di puntamento, adattamento, polarizzazione), l’antenna in ricezione
ha un parametro Aeff = d · λ2
4πtale che:
Pcapt = Sinc ·Aeff =
∣∣Einc∣∣22η
·Aeff
7.4 - Parametri di caratterizzazione di un’antenna 55

Propagazione L-A CC© BY:© $\© =©
Senza perdite si ha PR = Pcapt. Con perdite, invece:
PR = Sinc · Aeff · δ︸ ︷︷ ︸A
(g)eff
dove A(g)eff e l’area efficace che tiene conto delle perdite ohmiche:
A(g)eff = G · λ
2
4π
Si puo anche definire un’area efficace direzionale:
A(g)eff (ϑ, ϕ) = G(ϑ, ϕ) · λ
2
4π
Direttivita direzionale (d(ϑ, ϕ)). Anche funzione guadagno in direttivita. Si era defi-nito:
d =P0
Pirr=
4πr2 ·Smax
Pirr
Il guadagno d’antenna in una direzione generica e:
d(ϑ, ϕ) =P0(ϑ, ϕ)Pirr
=4πr2 ·S(ϑ, ϕ, r)
Pirr
=4π · Ir(ϑ, ϕ)
Pirr
=4π · Ir(ϑ, ϕ)
Pirr· Irmax(ϑmax, ϕmax)Irmax(ϑmax, ϕmax)
=4π · Irmax
Pirr· Ir(ϑ, ϕ)Irmax
= d · ir(ϑ, ϕ)
Guadagno direzionale (G(ϑ, ϕ)). Si era definito:
G =P0
Pirr· δ = d · δ
Il guadagno in potenza in una direzione generica e:
G =P0(ϑ, ϕ)Pirr
· δ
= d(ϑ, ϕ) · δ= d · ir(ϑ, ϕ) · δ
=P0(ϑ, ϕ)PT
Intensita di campo emesso da un’antenna.
E = jη
2λM t
e−jβr
rcon G(ϑ, ϕ) =
4πr2
PT·∣∣E∣∣22η︸ ︷︷ ︸S
∣∣E∣∣ =
√η ·PT ·G(ϑ, ϕ)
2π· 1r'√
60 ·PT ·Gr
56 7.5 - Equazione del radiocollegamento (di Friis)

Propagazione L-A CC© BY:© $\© =©
Figura 7.8: Collegamento radio in spazio libero
7.5 Equazione del radiocollegamento (di Friis)
Un collegamento radio in spazio libero (figura 7.8), adattato elettricamente e in polariz-zazione, presenta un guadagno di potenza pari a:
GT (ϑT , ϕT ) =4πr2 ·ST (ϑT , ϕT , r)
PT
dal quale e possibile ricavare la densita di potenza:
ST =GT ·PT
4πr2
La potenza ricevuta all’antenna ricevente e calcolabile soppesando la potenza trasmessacon i guadagni direzionali delle due antenne:
PR = ST (ϑT , ϕT , r) ·AeffR(ϑR, ϕR)
= ST ·GR(ϑR, ϕR) · λ2
4π
=GT (ϑT , ϕT ) ·PT
4πr2·GR(ϑR, ϕR) · λ
2
4π
= PT ·GT (ϑT , ϕT ) ·GR(ϑR, ϕR) ·(
λ
4πr
)2
Definizione 34 (Attenuazione di tratta). L =PTPR
=(
4πrλ
)2
· 1GT ·GR
.
Definizione 35 (Attenuazione isotropa di spazio libero). E l’attenuazione dovuta sola-mente alla propagazione:
LI0 = 20 log4πrλ
[dB]
7.6 Bipolo corto
Un bipolo corto (figura 7.9(a)) e un’antenna di lunghezza trascurabile rispetto alla lun-ghezza d’onda (L λ), nella quale scorre una corrente impressa I · iz.
Il momento equivalente del bipolo corto vale:
M =∫L′I · iz · ej
2πλ (r′ · ir) dl′
= I · iz ·∫L′ej2π
r′ · irλ︸ ︷︷ ︸
'1
dl′
= I · iz ·∫ L
2
−L2dl′
= I ·L · iz
7.5 - Equazione del radiocollegamento (di Friis) 57

Propagazione L-A CC© BY:© $\© =©
(a) Geometria spaziale (b) Diagramma di radiazione
Figura 7.9: Bipolo corto
Si possono ricavare tutte le caratteristiche del bipolo corto.
Campo elettrico: E = jη
2λe−jβr
rIL sinϑiϑ︸ ︷︷ ︸
Mt
.
Intensita di radiazione: Ir(ϑ) =|E|2
2η· r2 =
η
8
(L
λ
)2
· |I|2 sin2 ϑ.
Intensita di radiazione normalizzata: ir(ϑ) =I(ϑ, ϕ)
IMAX(ϑ, ϕ)= sin2 ϑ
Funzione di radiazione: f(ϑ) =√ir = | sinϑ|. Il diagramma di radiazione relativo e in
figura 7.9(b).
Guadagno in direttivita: d =4π
2π∫ π
0
ir(ϑ) sinϑ dϑ=
2∫ π
0
sin3 ϑ dϑ
=243
=32
.
Potenza irradiata:
Pirr =∫
4π
Ir dΩ =12Rirr|I|2
=∫
4π
η
8
(L
λ
)2
|I|2 sinϑ dϑ =πη
3
(L
λ
)2
|I|2
La resistenza equivalente di irraggiamento e Rirr =2π3η
(L
λ
)2
.
Area efficace: e indipendente da d. Supponiamo che l’antenna sia investita da un campo
elettrico con medesima direzione dell’antenna, allora E =|E|2
2ηe si puo considerare
l’antenna come un circuito composto da una resistenza alimentante Rg = Rirr edalla resistenza ricevente RL = Rirr (in adattamento). L’antenna e alimentata conVg = f(E) = −|E| ·L che rappresenta il campo elettrico e trasferisce al carico RLuna potenza:
Pd =|Vg|2
8Rirrcioe, traslando il risultato in potenza ricevuta:
PR =|E|2 ·L2
8 · 2πη·(λ
L
)2
=3
16π|E|2λ
2
η= Aeff ·
|E|2
2η
Allora l’area efficace vale:
Aeff =3
8π·λ2 =
32· λ
2
4π= d · λ
2
4π
58 7.6 - Bipolo corto

Propagazione L-A CC© BY:© $\© =©
7.7 Cenni sulle antenne rettilinee
Un’antenna rettilinea e un bipolo caratterizzato dalle geometrie visibili in figura 7.10, senzavincoli tra lunghezza (L) e lunghezza d’onda (λ), nel quale e impressa la corrente I(z).
Il momento equivalente di una generica antenna rettilinea si calcola come:
M =∫ L
−LI(z) · ejβz · iz · ir dz
Figura 7.10: Antenna rettilinea
7.7.1 Bipolo λ/2
Il bipolo λ/2 ha lunghezza complessiva pari aλ
2, quindi ognuno dei due tratti ripiegati si
estende perλ
4(figura 7.11). Dopo aver ripiegato il tratto finale, nel punto corrispondente
alla piega viene a trovarsi il massimo valore della corrente su entrambi i conduttori, quindil’antenna emette campo in maniera direttiva nella direzione perpendicolare ai conduttoriripiegati.
Figura 7.11: Bipolo λ/2
La corrente che scorre sull’antenna e che genera il campo vale:
I(z) = I0 sin[
2πλ
(λ
4− |z|
)](
2πλ
= β
)= I0 sin
[π2− β|z|
]
7.7 - Cenni sulle antenne rettilinee 59

Propagazione L-A CC© BY:© $\© =©
Si nota che l’argomento del seno e nella forma canonica delle onde che si propagano, indirezione z.
Il momento equivalente del bipolo λ/2 vale:
M =∫ L
−LI(z) · ejβz cosϑ dz
L’intensita di radiazione vale:
ir(ϑ) =cos2
(π2
cosϑ)
sin2 ϑ
che da origine al diagramma di radiazione di figura 7.12: l’antenna λ/2 e decisamente piudirettiva del bipolo corto (infatti il guadagno in direttivita e d ' 1, 64).
La resistenza equivalente di irradiazione ha un valore pressoche standard:
Rirr = 2, 44 · η4π' 73 Ω
Figura 7.12: Bipolo λ/2: diagramma di radiazione
7.8 Teorema di reciprocita
Consideriamo un sistema elettromagnetico all’interno del volume V∞. In esso sono presentidue distribuzioni di sorgenti, legate alle correnti impresse J1 e J2. Ad ogni sorgente eassociato un solo campo elettromagnetico:
J1 →(E1, H1
), J2 →
(E2, H2
)Si possono scrivere le equazioni di Maxwell, che valgono separatamente:
∇×H1 = jωεcE1 + J1
∇× E1 = −jωµH1,
∇×H2 = jωεcE2 + J2
∇× E2 = −jωµH2
Associamo una prima coppia di equazioni, che scegliamo essere ∇×H1 e ∇×E2, operandosu ognuna moltiplicandola scalarmente per la grandezza dell’altra equazione:
E2 ·(∇×H1
)=
(jωεcE1 + J1
)·E2 −
H1 ·(∇× E2
)=
(−jωµH2
)=
E2 · ∇ ×H1 −H1 · ∇ × E2 = −∇ ·(E2 ×H1
)= jωεcE1 ·E2 + E2 · J1 + jωµH1 ·H2 (1)
Analogamente, con le due equazioni rimaste, si ottiene:
−∇ ·(E1 ×H2
)= jωεcE1 ·E2 + E1 · J2 + jωµH1 ·H2 (2)
Ora e possibile calcolare la differenza tra il risultato (2) e il risultato (1):
∇ ·(E2 ×H1 − E1 ×H2
)= J2 ·E1 − J1 ·E2
Consideriamo ora un volume V , racchiuso entro una superficie S di normale in, e integria-mo su di esso:∫∫∫
V
∇ ·(E2 ×H1 − E1 ×H2
)dV =
∫∫∫V
(J2 ·E1 − J1 ·E2
)dV
60 7.8 - Teorema di reciprocita

Propagazione L-A CC© BY:© $\© =©
che, applicando il teorema di Gauss al primo termine, diventa:∫∫S
(E2 ×H1 − E1 ×H2
)· in dS =
∫∫∫V
J2 ·E1 dV −∫∫∫
V
J1 ·E2 dV
Teorema 12 (di reciprocita).∫∫S
(E2 ×H1 − E1 ×H2
)· in dS =
∫∫∫V
J2 ·E1 dV −∫∫∫
V
J1 ·E2 dV
Consideriamo ora il volume V suddiviso in un volume interno Vi, che racchiude lesorgenti, e in un volume esterno Ve che e la differenza tra i due (figura 7.13). La superficiedel volume Se e l’unione delle superfici di Vi e di V .
Figura 7.13: Caso applicativo del teorema di reciprocita
Si puo applicare il teorema di reciprocita a Ve ma, poiche non ci sono sorgenti al suointerno, rimane:∫∫
Si
(E2 ×H1 − E1 ×H2
)· in dS =
∫∫∫V
J2 ·E1 dV︸ ︷︷ ︸0
−∫∫∫
V
J1 ·E2 dV︸ ︷︷ ︸0
= 0
Si puo applicare il teorema anche a Vi: stavolta e il primo membro ad essere gia statocalcolato.∫∫
Si
(E2 ×H1 − E1 ×H2
)· in dS︸ ︷︷ ︸
0
=∫∫∫
Vi
J2 ·E1 dV −∫∫∫
Vi
J1 ·E2 dV
da cui segue che: ∫∫∫Vi
J2 ·E1 dV =∫∫∫
Vi
J1 ·E2 dV
Corollario 13. In un volume entro il quale sono racchiuse tutte le sorgenti del sistemaelettromagnetico, le potenze generate da correnti e campi elettrici non corrispondenti sonouguali: ∫∫∫
Vi
J2 ·E1 dV =∫∫∫
Vi
J1 ·E2 dV
7.8.1 Tratta radio
Figura 7.14: Tratta radio (due porte)
7.8 - Teorema di reciprocita 61

Propagazione L-A CC© BY:© $\© =©
Consideriamo il sistema di trasmissione in figura 7.14. Il sistema e composto da duesistemi di sorgenti: [
V1
V2
]=[Z]·[I1I2
]con la matrice impedenza
[Z]
=[Z11 Z12
Z21 Z22
]. Vale percio la relazione:
V1 = Z11 · I1︸ ︷︷ ︸V11
+Z12 · I2︸ ︷︷ ︸V12
E possibile applicare il teorema di reciprocita sui due bipoli corti, poiche le sorgenti sonoconfinante al loro interno separatamente:∫
l2
I2 · il2 ·E1︸ ︷︷ ︸cost.
dl2 =∫l1
I1 · il1 ·E2︸ ︷︷ ︸cost.
dl1
I2 · il2 ·E1 ·L2︸ ︷︷ ︸V21
= I1 · il1 ·E2 ·L1
V21 e la proiezione di E1 su L2: e una tensione generata sull’antenna 2 a causa del campo1. Analogamente accade per il secondo membro, quindi:
I2 ·V21 = I1 ·V12
Sviluppando si ottiene una caratteristica della matrice impedenza, cioe:
I2 ·Z21 · I1 = I1 ·Z12 · I2 ⇒ Z21 = Z12
62 7.8 - Teorema di reciprocita

APPENDICE A
Operazioni vettoriali
A.1 Operazioni su vettori
A.1.1 Modulo∣∣A∣∣ =√ax2 + ay2 + az2 ∈ R se A ∈ R3
∣∣A∣∣ =√|ax|2 + |ay|2 + |az|2 ∈ R se A ∈ C3
A.1.2 Prodotto scalare
A ·B =∣∣A∣∣ · ∣∣B∣∣ · cosϑ con 0 ≤ ϑ ≤ π (convesso)
A · i e la proiezione di A lungo la direzione tracciata dal versore i. Sapendo che:
ix · ix = iy · iy = iz · iz = 1
perche sono a due a due paralleli, e che:
ix · iy = iy · iz = iz · ix = 0
perche sono a due a due ortogonali, allora:
A ·B = axbx + ayby + azbz
A2 =∣∣A∣∣2 = A ·A ⇒ A =
∣∣A∣∣ =√A ·A
A.1.3 Prodotto vettoriale
A×B =∣∣A∣∣ · ∣∣B∣∣ · sinϑ · in con 0 ≤ ϑ ≤ π (convesso)
in e il versore normale al piano sul quale giacciono A e B. A, B e in sono una ternadestrorsa.
• Il modulo del prodotto vettoriale e l’area del parallelogramma di lati A e B. SeA×B = 0 e A,B 6= 0, allora A //B.
• Il prodotto vettoriale e anticommutativo:
A×B = −B ×A
A - Operazioni vettoriali 63

Propagazione L-A CC© BY:© $\© =©
• Il prodotto vettoriale non e associativo: bisogna mettere le parentesi per determinarela precedenza. L’unico caso in cui non sono richieste e:
se A = C, allora A×(B × C
)= C ×
(B × C
)=(C ×B
)× C = C ×B × C
In particolare, se C e un versore:
C = in normale rispetto al piano di riferimento
allora si scompone B in due componenti:
B// =(B · in
)· in componente parallela (a in)
Bt = in ×B × in componente trasversa
con B = B// +Bt.
• Il prodotto vettoriale si puo ottenere dal determinante simbolico:
A×B =
∣∣∣∣∣∣ix iy izax ay azbx by bz
∣∣∣∣∣∣Prodotto vettoriale triplo
A×(B × C
)=(A ·C
)·B −
(A ·B
)·C
• La somma di tre prodotti vettoriali tripli che abbiano i tre vettori permutati ciclica-mente e nulla:
A×(B × C
)+B ×
(C ×A
)+ C ×
(A×B
)= 0
A.1.4 Prodotto misto
A ·(B × C
)=∣∣A∣∣ · ∣∣B × C∣∣ · cosϑ =
∣∣∣∣∣∣ax ay azbx by bzcx cy cz
∣∣∣∣∣∣• Il prodotto misto e il volume del parallelepipedo di lati A, B e C. Se A ·
(B × C
)= 0,
allora i vettori sono complanari.
• Il prodotto misto e invariante rispetto al cosiddetto “scambio punto-croce”:
A ·B × C = A×B ·C
• Il prodotto misto e invariante rispetto alla permutazione ciclica dei tre vettori:
A ·B × C = B ·C ×A = C ·A×B
A.1.5 Prodotti quadrupli
• Prodotto di Lagrange:(A×B
)·(C ×D
)= A ·B ×
(C ×D
)=
(A ·C
) (B ·D
)−(A ·D
) (B ·C
)•(A×B
)×(C ×D
)= C
[A ·(B ×D
)]−D
[A ·(B × C
)].
• A×[B ×
(C ×D
)]=(B ·D
) (A× C
)−(B ·C
) (A×D
)
64 A.1 - Operazioni su vettori

Propagazione L-A CC© BY:© $\© =©
A.1.6 Derivate di vettori
A(u) e una funzione a valori vettoriali, nel parametro scalare u.
dA(u)du
=dAx(u)du
ix+dAy(u)du
iy +dAz(u)du
iz
A.1.7 Integrali di vettori∫ b
a
A(u) du =∫ b
a
Ax(u) du · ix +∫ b
a
Ay(u) du · iy +∫ b
a
Az(u) du · iz
R(u) =dS(u)du
⇒∫ b
a
R(u) du = S(b)− S(a)
A.2 Vettore posizione
r = x · ix + y · iy + z · izUna curva e nota se, per ogni punto P (x, y, z), si conosce la rispettiva distanza dall’origine.Le coordinate sono funzioni di un parametro u, per cui si ha una parametrizzazione di P (u)e r(u): x = x(u)
y = y(u)z = z(u)
oppure
x = u (parametro)y = f(u)z = g(u)
In maniera alternativa, si puo esprimere la curva come intersezione tra due piani:F (x, y, z) = 0G(x, y, z) = 0
Calcolo degli infinitesimi di linea. dr = dx · ix + dy · iy + dz · iz = dl · il.il e il versore tangente alla curva. dl e l’elemento infinitesimo di linea:
dl =√dr · dr =
√(dx)2 + (dy)2 + (dz)2
dl
du=
√dr
du· drdu
=∣∣∣r′(u)
∣∣∣ ⇒ dl =∣∣∣r′(u)
∣∣∣ duil =
dr∣∣∣dr∣∣∣ =r′(u)∣∣∣r′(u)
∣∣∣A.2.1 Campi
Campo scalare: associa ad un punto un valore scalare.
φ : R3 → R , φ(x, y, z)
Campo vettoriale: associa ad un punto un vettore.
E : R3 → R3 , E(x, y, z)
oppure:E : R3 → C3 , E(x, y, z)
Linee di flusso. Un campo deve avere direzione tangente alle linee di flusso. L’espres-sione delle linee di flusso si ricava risolvendo l’equazione:
V × dr = 0
cioe:Vy dz − Vz dy = 0Vz dx− Vx dz = 0Vx dy − Vy dx = 0
⇒ dx
Vx=dy
Vy=dz
Vz
A.2 - Vettore posizione 65

Propagazione L-A CC© BY:© $\© =©
A.3 Integrale curvilineo
A.3.1 Integrali di campi scalari∫φdl =
∫φ(x(u), y(u), z(u)
)·∣∣∣r′(u)
∣∣∣ duA.3.2 Integrali di campi vettoriali∫
V · il dl︸︷︷︸dl
=∫V(x(u), y(u), z(u)
)· r′(u)∣∣∣r′(u)
∣∣∣︸ ︷︷ ︸il
·∣∣∣r′(u)
∣∣∣ du︸ ︷︷ ︸dl
=∫V · r′(u) du
In forma differenziale: ∫V dl =
∫ [Vx dx+ Vy dy + Vz dz
]Se il campo vettoriale e bidimensionale, allora si puo ricorrere a una forma semplificata:
z = 0y = f(x) ⇒ dy = f ′(x) dx∫
l
V · il dl =∫ x2
x1
[Vx(x, f(x)
)dx+ Vy
(x, f(x)
)· f ′(x) dx
]Circuitazione. Se la curva e chiusa, cioe:
u ∈ [u1 , u2] e r(u1) = r(u2)
allora l’integrale curvilineo e definito circuitazione, senza cambiamento di significato,nonostante possa essere scritto con diversa notazione:∮
V dl
A.4 Superfici. Integrali di superficie
Una superficie e nota se, per ogni punto P (x, y, z), si conoscono i rispettivi vettori posizio-ne. Le coordinate sono funzioni di due parametri u e v, per cui si ha una parametrizzazionedi P (u, v) e r(u, v): x = x(u, v)
y = y(u, v)z = z(u, v)
oppure
x = u (parametro)y = vz = z(u, v) = z(x, y)
Il tutto equivale a:
r(u, v) = x(u, v) · ix + y(u, v) · iy + z(u, v) · iz
Calcolo degli infinitesimi di superficie. Ci interessa il piano tangente alla superficie.∂r
∂ue∂r
∂vdeterminano un piano tangente. Il vettore:
n =∂r
∂u× ∂r
∂v
determina la direzione normale rispetto alla superficie. Il relativo versore normale e:
in(u, v) =n
|n|dS e l’elemento infinitesimo di superficie, centrato sul punto P :
dS =∣∣∣∣ ∂r∂u × ∂r
∂v
∣∣∣∣ du dv
66 A.3 - Integrale curvilineo

Propagazione L-A CC© BY:© $\© =©
Integrale di flusso. L’integrale di superficie piu interessante e quello che consente dicalcolare il flusso: ∫
S
V · in dS =∫S
V ·∂r∂u ×
∂r∂v∣∣ ∂r
∂u ×∂r∂v
∣∣ ·∣∣∣∣ ∂r∂u × ∂r
∂v
∣∣∣∣ du dv=
∫∫S
V ·[∂r
∂u× ∂r
∂v
]du dv
A.5 Coordinate curvilinee
Coordinate cilindriche.
• ρ: proiezione del raggio vettore (su di un piano z = cost.);
• ϕ: azimut, longitudine;
• z: quota.
I coefficienti metrici sono:
h1 = 1 , h2 = ρ , h3 = 1
Coordinate sferiche.
• r: raggio vettore;
• ϑ: elevazione, colatitudine;
• ϕ: azimut, longitudine.
I coefficienti metrici sono:
h1 = 1 , h2 = r , h3 = r · sinϑ
A.5.1 Integrali con coordinate curvilinee
Circuitazione.∮V · il dl.
dl = ds2 = h2 dϕ = Rdϕ
il = iϕ = − sinϕ · ix + cosϕ · iy
Flusso.∫∫
V · in dS.
dS = ds2 · ds3 = h2h3 dϑ dϕ = R2 sinϑ dϑ dϕ
in = ir = sinϑ cosϕ · ix + sinϑ sinϕ · iy + cosϑ · iz
Integrali di volume. dV = ds1 ds2 ds3 = h1h2h3 du1 du2 du3.In coordinate cartesiane: dV = dx dy dz.In coordinate cilindriche: dV = ρ dρ dϕ dz.In coordinate sferiche: dV = r2 sinϑ dr dϑ dϕ.
A.5 - Coordinate curvilinee 67
APPENDICE B
Campi vettoriali
B.1 Campi conservativi e campi irrotazionali
Ipotesi iniziali. Si definiscono preliminarmente:
• V (x, y, z): campo vettoriale, definito su Ω;
• Ω: regione di spazio di dominio;
• γ: cammino definito in Ω, avente per estremi A e B;
• l(u): parametrizzazione di γ di variabile scalare u:
l : u ∈ [a, b] ⊆ R → [γ] ⊆ R3
con A = l(a) e B = l(b).
Definizione 36 (Circuitazione). Integrale curvilineo calcolato lungo il percorso γ sulcampo vettoriale V :
Lγ =∫γ
V dl
Generalmente, la circuitazione dipende da γ.
Definizione 37 (Campo conservativo). Un campo vettoriale V e conservativo (oppureesatto) se, per ogni punto P del dominio Ω, e esprimibile come il differenziale esatto di uncampo scalare U(x, y, z):
V dl = dU
Teorema 14. Se un campo vettoriale e conservativo, allora la propria circuitazione nondipende dal cammino di integrazione, ma solo dai suoi estremi A e B.
Dimostrazione. Applicando la definizione di campo conservativo, risulta:
Lγ =∫γ
V dl =∫γ
dU =∫ B
A
dU = U(B)− U(A)
Corollario 15. Se un campo vettoriale e conservativo, allora la propria circuitazione suun cammino chiuso di integrazione e nulla.
68 B - Campi vettoriali

Propagazione L-A CC© BY:© $\© =©
Teorema 16. Se un campo vettoriale e conservativo, allora e possibile esprimerlo comegradiente di un campo scalare U (potenziale):
V = ∇U
Definizione 38 (Campo irrotazionale). Un campo vettoriale V e irrotazionale se, perogni punto P del dominio Ω, ha rotore nullo:
∇× V = 0
Teorema 17. Se un campo vettoriale e conservativo, allora esso e irrotazionale:
V = ∇U ⇒ ∇× V = 0
Dimostrazione. Se V e conservativo, allora si puo esprimere V = ∇U . Per leproprieta degli operatori differenziali si puo scrivere:
∇× V = ∇×∇U = 0
Corollario 18. Se un campo vettoriale e irrotazionale entro un dominio Ω a connessionelineare semplice, allora esso e conservativo.
B.2 Campi solenoidali e campi indivergenti
Definizione 39 (Campo solenoidale). Un campo vettoriale V e solenoidale se, per ognisuperficie chiusa arbitraria S contenuta nel dominio Ω, il suo flusso attraverso S e nullo:∫∫
S
V · in dS = 0
Teorema 19. Se un campo vettoriale e solenoidale, allora per ogni coppia di superfici(aventi lo stesso contorno Γ) il flusso attraverso di esse e costante:∫∫
S1
V · in dS =∫∫
S2
V · in dS
Nota B.2.1. Il flusso di un campo solenoidale attraverso una superficie aperta dipende solo dal suocontorno Γ e non dalla superficie stessa: per questo motivo, il flusso di un campo solenoidale attraversouna superficie aperta di contorno Γ e detto flusso concatenato con la linea chiusa Γ.
Teorema 20. Se un campo vettoriale e solenoidale, allora e possibile esprimerlo comerotore di un campo vettoriale G (potenziale vettore):
V = ∇×G
Corollario 21. Se un campo vettoriale e solenoidale, allora esiste un campo vettoriale Gdefinito nello stesso dominio Ω (potenziale vettore) tale che:∫∫
S1
V · in dS =∮
Γ
G · il dl
Definizione 40 (Campo indivergente). Un campo vettoriale V e indivergente se, per ognipunto P del dominio Ω, ha divergenza nulla:
∇ ·V = 0
Teorema 22. Se un campo vettoriale e solenoidale, allora esso e indivergente:
V = ∇×G ⇒ ∇·V = 0
B.2 - Campi solenoidali e campi indivergenti 69

Propagazione L-A CC© BY:© $\© =©
Dimostrazione. Se V e solenoidale, allora si puo esprimere V = ∇×G. Per leproprieta degli operatori differenziali si puo scrivere:
∇ ·V = ∇ ·∇ ×G = 0
Corollario 23. Se un campo vettoriale e indivergente entro un dominio Ω a connessionesuperficiale semplice, allora esso e solenoidale.
B.2.1 Proprieta dei campi solenoidali
Proprieta B.2.1. Il flusso di un campo solenoidale attraverso una generica sezione di untubo di flusso e costante, al variare della sezione stessa.
Proprieta B.2.2. I tubi di flusso di un campo solenoidale non possono avere un inizio euna fine nella porzione di spazio in cui e definito il campo: o si estendono indefinitamente,oppure sono chiusi.
Dimostrazione per assurdo. Se un tubo di flusso avesse un inizio o una fine,dovrebbe chiudersi in un punto (sorgente oppure pozzo) nelle sezioni di inizio edi fine: attraverso queste sezioni, il flusso del campo risulterebbe nullo. Allora,pero, il flusso del campo vettoriale sarebbe nullo in ogni altra sezione, rendendoassurda la definizione di tubo di flusso.
Proprieta B.2.3. Il flusso di un campo vettoriale solenoidale attraverso il proprio tubodi flusso e uguale alla circuitazione del relativo potenziale vettore lungo una linea li cheavvolge il tubo di flusso:∫∫
Si
V · in dS =∫∫
Si
∇×G · in dS =∮li
Gdl
B.3 Campi armonici
Definizione 41 (Campo armonico). Un campo vettoriale V e armonico se e contempo-raneamente conservativo e solenoidale.
Teorema 24. Il potenziale scalare U di un campo armonico soddisfa l’equazione di Laplacescalare:
∇2U = 0
Dimostrazione. Essendo il campo conservativo si puo esprimere V = ∇U .Essendo anche solenoidale, allora e indivergente:
∇ ·V = ∇ ·∇U = ∇2U = 0
Teorema 25. Il potenziale vettore G di un campo armonico soddisfa l’equazione di Laplacevettoriale:
∇2G = 0
Dimostrazione. Essendo il campo solenoidale si puo esprimere V = ∇ × G.Essendo anche conservativo, allora e irrotazionale:
∇× V = ∇× (∇×G) = −∇2G+∇(∇ ·G) = 0
Poiche G e determinato a meno di un gradiente, e possibile scegliere un poten-ziale vettore G che soddisfi la condizione di indivergenza (scelta di Coulomb):operando tale scelta, risulta ∇(∇ ·G) = 0, per cui vale l’equazione di Laplacevettoriale.
70 B.3 - Campi armonici

Elenco delle figure
1.1 Carica Q e campo elettrico . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2 Corrente i e campo magnetico . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3 Geometrie spaziali di definizione delle equazioni di Maxwell . . . . . . . . . 11
2.1 Superficie di separazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Continuita delle componenti normali . . . . . . . . . . . . . . . . . . . . . . 132.3 Continuita delle componenti tangenti . . . . . . . . . . . . . . . . . . . . . . 14
5.1 Riflessione e rifrazione di un’onda piana uniforme . . . . . . . . . . . . . . . 345.2 Riflessione e rifrazione di un’onda piana uniforme: piano d’incidenza . . . . 355.3 Riflessione e rifrazione di un’onda piana uniforme: riferimenti locali . . . . . 36
7.1 Antenna estesa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 487.2 Antenna estesa: traslazione del sistema di riferimento . . . . . . . . . . . . 517.3 Angolo solido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527.4 Diagrammi di radiazione standard . . . . . . . . . . . . . . . . . . . . . . . 537.5 Diagramma di radiazione: parametri d’antenna . . . . . . . . . . . . . . . . 547.6 Antenna trasmittente e potenze associate . . . . . . . . . . . . . . . . . . . 557.7 Antenna ricevente e potenze associate . . . . . . . . . . . . . . . . . . . . . 557.8 Collegamento radio in spazio libero . . . . . . . . . . . . . . . . . . . . . . . 577.9 Bipolo corto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 587.10 Antenna rettilinea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.11 Bipolo λ/2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.12 Bipolo λ/2: diagramma di radiazione . . . . . . . . . . . . . . . . . . . . . . 607.13 Caso applicativo del teorema di reciprocita . . . . . . . . . . . . . . . . . . 617.14 Tratta radio (due porte) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Elenco delle figure 71