Notiziario Tecnico TI (Coratella) anno 11 n. 1 giugno 2002
17
Il Sistema GPS 1. Introduzione Il GPS, o più precisamente il sistema GPS - NAV- STAR (Global Positioning System - NAVigation Satellite Timing And Ranging) è nato negli Stati Uniti negli anni Settanta come sistema militare su progetto della US Navy, poi sviluppato dal DoD (Department of Defence) americano attraverso il GPS Joint Program Office della USAF Space Division. Il sistema consente di determinare le coordinate di un qualsiasi punto sulla superficie terrestre, in qual- siasi istante, e con qualsiasi condizione atmosferica, purché un numero sufficiente di satelliti sia in visibi- lità radio (in realtà esso funziona fino a quote di qual- che decina di km). In più per tale punto, esso fornisce anche un riferimento temporale assoluto (tempo GPS) con un livello di precisione molto elevata. Il sistema è oggi gestito dal DoD, che oltre a effettuare il controllo e la manutenzione della rete satellitare, stabilisce con quali precisioni il sistema è fruibile (gratuitamente) per applicazioni civili. Come ogni sistema satellitare, il sistema GPS è sud- diviso in tre blocchi principali o segmenti: spaziale, di controllo e di utente [1]. DUILIO CORATELLA Il sistema GPS consente di determinare con elevata precisione la posizione in tre dimen- sioni di un qualsiasi punto della superficie terrestre. Oltre agli scopi militari per cui è nato, esso permette lo sviluppo di innumerevoli applicazioni nei più diversi settori. Il presente articolo si pone l’obiettivo di descrivere in quale modo sia possibile effettuare misure con precisione che, in certe condizioni e con particolari tecniche, può essere addi- rittura centimetrica a partire da satelliti distanti oltre 20mila chilometri dalla superficie terrestre. Dopo una breve analisi dei diversi segmenti (spaziale, di controllo, di utente), nell’arti- colo è descritto il segnale GPS emesso dai satelliti e il funzionamento di un ricevitore. Si analizzano quindi le diverse fonti di errore intrinseco che inficiano l’accuratezza rag- giungibile e si descrive il principio su cui si basa la tecnica di correzione differenziale, che consente di eliminare o di attenuare l’effetto di alcuni errori incrementando la precisione del posizionamento. Tra gli operatori radiomobili, TIM ha di recente avvertito l’esigenza di pianificare la copertura cellulare sul territorio con un’accuratezza sempre maggiore, ricorrendo al GPS e alla tecnica di correzione differenziale per determinare le coordinate delle proprie antenne. In un prossimo articolo saranno illustrate la rete di stazioni GPS di riferimento TIM e l’architettura di sistema in grado di erogare i dati di correzione differenziale GPS (utili per topografi, geologi, ricercatori, aziende municipalizzate, aziende per la realizzazione di grandi infrastrutture, ...). In ulteriori articoli sarà trattato il tema della localizzazione per reti radiomobili, descri- vendo le principali tecniche oggi standardizzate in ambito ETSI e 3GPP. Tecnologie radio NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 87
-
Upload
duilio-coratella -
Category
Documents
-
view
28 -
download
3
Transcript of Notiziario Tecnico TI (Coratella) anno 11 n. 1 giugno 2002

Il Sistema GPS
1. Introduzione
Il GPS, o più precisamente il sistema GPS - NAV-STAR (Global Positioning System - NAVigation SatelliteTiming And Ranging) è nato negli Stati Uniti negli anniSettanta come sistema militare su progetto della USNavy, poi sviluppato dal DoD (Department of Defence)americano attraverso il GPS Joint Program Office dellaUSAF Space Division.
Il sistema consente di determinare le coordinate diun qualsiasi punto sulla superficie terrestre, in qual-siasi istante, e con qualsiasi condizione atmosferica,
purché un numero sufficiente di satelliti sia in visibi-lità radio (in realtà esso funziona fino a quote di qual-che decina di km). In più per tale punto, esso fornisceanche un riferimento temporale assoluto (tempoGPS) con un livello di precisione molto elevata. Ilsistema è oggi gestito dal DoD, che oltre a effettuareil controllo e la manutenzione della rete satellitare,stabilisce con quali precisioni il sistema è fruibile(gratuitamente) per applicazioni civili.
Come ogni sistema satellitare, il sistema GPS è sud-diviso in tre blocchi principali o segmenti: spaziale, dicontrollo e di utente [1].
DUILIO CORATELLA Il sistema GPS consente di determinare con elevata precisione la posizione in tre dimen-sioni di un qualsiasi punto della superficie terrestre. Oltre agli scopi militari per cui ènato, esso permette lo sviluppo di innumerevoli applicazioni nei più diversi settori. Ilpresente articolo si pone l’obiettivo di descrivere in quale modo sia possibile effettuaremisure con precisione che, in certe condizioni e con particolari tecniche, può essere addi-rittura centimetrica a partire da satelliti distanti oltre 20mila chilometri dalla superficieterrestre.Dopo una breve analisi dei diversi segmenti (spaziale, di controllo, di utente), nell’arti-colo è descritto il segnale GPS emesso dai satelliti e il funzionamento di un ricevitore. Sianalizzano quindi le diverse fonti di errore intrinseco che inficiano l’accuratezza rag-giungibile e si descrive il principio su cui si basa la tecnica di correzione differenziale, checonsente di eliminare o di attenuare l’effetto di alcuni errori incrementando la precisionedel posizionamento.Tra gli operatori radiomobili, TIM ha di recente avvertito l’esigenza di pianificarela copertura cellulare sul territorio con un’accuratezza sempre maggiore, ricorrendoal GPS e alla tecnica di correzione differenziale per determinare le coordinate delleproprie antenne.In un prossimo articolo saranno illustrate la rete di stazioni GPS di riferimento TIM el’architettura di sistema in grado di erogare i dati di correzione differenziale GPS (utiliper topografi, geologi, ricercatori, aziende municipalizzate, aziende per la realizzazionedi grandi infrastrutture, ...).In ulteriori articoli sarà trattato il tema della localizzazione per reti radiomobili, descri-vendo le principali tecniche oggi standardizzate in ambito ETSI e 3GPP.
Tecnologie
radio
NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 87

88 NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002
Coratella • Il Sistema GPS
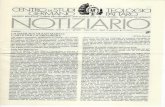
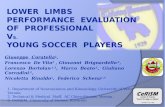
Il segmento spaziale (figura 1) è basato su unacostellazione di ventiquattro satelliti, disposti susei orbite quasi circolari inclinate di 55° sul piano
equatoriale, a intervalli di longitudine di 60°, e adun’altezza (media) di circa 20.200 km dalla super-ficie terrestre.
Il periodo di rivoluzione di ciascun satellite èpari a 11 h 58 min 2,0455 s, ovvero ogni satellitecompie due orbite complete in poco meno di ungiorno solare, in modo che, per un punto qualsiasidella Terra, tutta la costellazione si ripresenta quo-tidianamente con un anticipo di un po’ meno diquattro minuti rispetto al giorno precedente. Iparametri orbitali adottati fanno sì che, in ogniistante e in ogni luogo, nell’ipotesi di assenza diostacoli, siano visibili almeno quattro satelliti. Ilivelli ricevuti al suolo sono però ottimizzati perangoli di elevazione intorno ai 40° sull’orizzonte(come sarà mostrato più avanti, nella figura 6 delparagrafo 2).
I satelliti oggi in orbita, realizzati dalla LockheedMartin, sono stati lanciati in date diverse. Essihanno dimensioni di circa 130x180x200 cm e unpeso di circa 800 kg. Utilizzano pannelli solari conuna superficie complessiva di circa sette metriquadrati, in grado di fornire una potenza di circa700 W. Dal momento che le misure di distanzaeffettuate dai ricevitori a terra sono ricavate damisure di intervalli temporali, gli orologi a bordodei satelliti sono estremamente precisi (costitui-scono cioè un livello primario di riferimento).Ciascun satellite ha a bordo quattro orologi atomici(due al cesio e due al rubidio) aventi stabilità
media pari a una parte su 1012; ciò comporta cheessi perdono un secondo ogni 1012 secondi, ovveroogni 317mila anni circa. Il GPS costituisce quindiun sistema di sincronizzazione di livello superiorea quello stabilito dalla specifica ITU-T G.811 per iPRC (Primary Reference Clocks) [7], che è pari a unaparte su 1011. Per la trasmissione si utilizzano duetrasmettitori in banda L.
La stabilizzazione dei satelliti è assicurata dasistemi giroscopici. A bordo sono anche presentimotori in grado di imprimere alle orbite piccolecorrezioni lungo tre assi ortogonali. Le scorte dicarburante sui satelliti limitano la vita media a nonpiù di 7÷8 anni.
Il segmento di controllo verifica lo stato di funzio-namento dei satelliti e ne aggiorna le relativeorbite. È costituito da una serie di stazioni di terradistribuite lungo la fascia equatoriale1, come ripor-tato in figura 2:• cinque Monitor Station per il controllo dei satel-
liti, situate a Colorado Springs (Colorado, StatiUniti), Isole Hawaii e Isola Kwajalein (OceanoPacifico), Isola di Ascensiòn (Oceano Atlantico)ed Isola Diego Garcia (Oceano Indiano);
• tre Upload Station per la trasmissione in banda Sverso i satelliti dei comandi di controllo e delleinformazioni da inserire nel Navigation Message(descritto nel paragrafo 2) destinato ai ricevitori;esse sono co-locate con le Monitor Station delleisole di Ascensiòn, Diego Garcia e Kwajalein;
• una Backup Station situata a Sunnyvale (Stati Uniti);• una Master Control Station a Colorado Springs
(Colorado, Stati Uniti), per il controllo dell’in-tero sistema.I satelliti sono soggetti a una forza di gravità che è
circa il sei per cento di quella al suolo, e ruotano con
una velocità tangenziale pari a circa 3,9 km/s, ovverodi circa 14.040 km/h (valore circa dodici volte supe-riore alla velocità tangenziale di rotazione della terra).Essendo il periodo di rivoluzione di ciascun satellite
Costellazione nominale GPS:24 satelliti in 6 piani orbitali
4 satelliti per ogni piano. Altitudine 20.200 km,
inclinazione 55°.
GPS = Global Positioning System
Fonte: Peter H. Dana
Figura 1 Schema della costellazione GPS e immagine diun satellite.
KwajaleinDiego Garcia
•Stazione di monitoraggio
Falcon AFBColorado Springs
•Stazione di monitoraggio
•Centro di controllo•Stazione di monitoraggio
Fonte: Peeter H. Dana
Ascension Island
•Stazione di monitoraggio
•Stazione di monitoraggio
Hawaii
Figura 2 Le stazioni di terra del sistema GPS.
(1) Alla latitudine 0° il satellite passa per il punto con un’elevazionemaggiore sull’orizzonte ed è quindi visibile (e di conseguenza monito-rabile) per un intervallo di tempo maggiore che ad altre latitudini.

NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 89
Coratella • Il Sistema GPS
pari a circa dodici ore, le Monitor Station equatorialideterminano due volte al giorno posizione, altezza,velocità e orbita dei satelliti, e le trasmettono allaMaster Station situata a Colorado Springs (Colorado).Qui, il sistema di controllo elabora i dati di correzionedelle effemeridi (descritte nel paragrafo 2), che sonopoi inviati ai satelliti dalle tre Upload Station; gli stessidati sono inseriti nel messaggio di navigazione(descritto nel paragrafo 2) e sono rispediti dai satellitiverso tutti i ricevitori, per le opportune correzioni.
Il segmento di utente è costituito dall’insieme deiricevitori GPS terrestri.
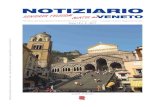
In figura 3 è mostrato uno schema tipico delricevitore che è costituito dai seguenti elementifondamentali:• antenna omnidirezionale;• orologio (oscillatore al quarzo);• unità di generazione dei codici (copia delle
sequenze emesse da ciascun satellite, da usare perla correlazione con i segnali ricevuti);
• unità di elaborazione,costituita da un micro-processore che elaborain tempo reale i segnaliricevuti per determinarela posizione del punto eche, eventualmente,apporta le correzioni dif-ferenziali;
• unità di memorizza-zione dei dati per lesuccessive post-elabo-razioni;
• unità di alimentazione(costituita da batterie oda un al imentatoreesterno).Nel paragrafo 2 saranno
descritti i segnali GPS e ilmodo con cui il ricevitoresincronizza il proprio oro-logio interno al tempo
GPS, mentre nei paragrafi 3 e 4 sarà trattato indettaglio il funzionamento del ricevitore.
2. Il segnale GPS
Ciascun satellite invia due segnali L1 ed L2,modulati sulle frequenze portanti multiple diquella fondamentale degli oscillatori atomici dibordo (f0 = 10,23 MHz):
fL1 = 154 x f0 = 1.575,42 MHz (λ1 = 19,05 cm)fL2 = 120 x f0 = 1.227,60 MHz (λ2 = 24,45 cm)
Secondo la specifica [5] i segnali sono compresiin due bande di ampiezza pari a 20,46 MHz, cen-trate su L1 ed L2, e sono polarizzati circolarmenteRHCP (Right-Hand Circularly Polarized).
La tecnica di modulazione è del tipo spreadspectrum a modulazione di fase, che consente la
MISURARE PER CONOSCERE:
LA STRATEGICITA’ DEL
SISTEMA GPS
Da sempre l’uomo ha avvertito lanecessità di misurare l’ambienteche lo circonda. Nelle varie epochestoriche la cartografia ha infattiassunto una fondamentale impor-tanza per lo sviluppo delle attivitàumane. Più in generale, la scienzasi fonda sul principio in base alquale per comprendere la realtà (unqualsiasi fenomeno o una grandezzafisica) è necessario caratterizzarlaattraverso la definizione di unità dimisura, costruendo una metrica e
definendo una metodologia dimisura.
Il sistema GPS - nato circa trenta annifa negli Stati Uniti sulla base di speci-fiche esigenze militari - consente dideterminare con straordinaria preci-sione (errore anche inferiore al centi-metro) la localizzazione di un qual-siasi punto della superficie terrestre, epermette per la prima volta di defi-nire un sistema di riferimento, sia spa-ziale che temporale, valido in tutto ilmondo. Per queste caratteristiche ilsistema ha velocemente catalizzato unforte interesse specie dal punto divista commerciale.
Recentemente, sulla base dellepressioni esercitate dalle impreseche utilizzano questo sistema per ipiù svariati usi civili e, soprattutto, aseguito della conclusione dellaguerra fredda, il governo degli StatiUniti ha consentito di migliorare, inmisura significativa, la precisionedel posizionamento ottenibile di unricevitore mediante sistemi GPS peruso civile, anche di basso costo.
È, perciò, prevedibile nel brevetermine un’ulteriore rapida crescitadel mercato dei servizi e dei pro-dotti relativi alle misure di posizio-namento.
Antenna
Mixer Demodulazione e controllo di codice
Generatore di codice C/A
Messaggio di
navigazione
Posizione, velocità e
tempo
•Allineamento di trama
•Controllo di parità•Decodifica
•Posizione dei satelliti
•Correzioni sulle pseudo-distanze
•Pseudo-distanze
•Calcolo di posizione, velocità e tempo del ricevitore
Misure di codice C/A
Misure di tempo
Orologio
Preamplificatore e convertitore alle basse frequenze
C/A = Coarse/Acquisition
Fonte: Peter H. Dana
Figura 3 Schema di un ricevitore GPS.

90 NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002
Coratella • Il Sistema GPS
decodifica del segnale utile anche quando esso ètotalmente immerso nel rumore.In figura 4 è mostrato lo spettrodei due segnali L1 ed L2.
Ogni satellite emette duesequenze pseudocasuali PRN (PseudoRandom Noise) diverse (codice Gold)2,che consentono anche di identificareciascun satellite, più un messaggioinformativo.
Queste sequenze sono:• C/A (Coarse /Acquis i t ion) , d i
pubblico dominio: sequenza di1.023 bit che si ripete con unacadenza di 1 ms a una velocitàdi cifra pari a 1,023 Mbit/s(fC/A = f0/10 = 1,023 MHz), uti-l izzato nel l ’SPS (StandardPositioning System);
• P (Precise o Protected), cifrabile(nel qual caso è chiamata Y) eusata solo a scopi mil i tar i :sequenza di 6,187104x1012 bitche si ripete ogni sette giornicon una velocità di cifra pari a10,23 Mbit/s (fP = f0 = 10,23 MHz),uti l izzato nel PPS (Prec i s ePositioning System).
• NAVigation Message: sequenza di 1.500 bit, tra-smessa con una frequenza di 50 bit/s, conte-
nente informazioni utili al ricevitore (descrittosuccessivamente).La tecnica di modulazione utilizzata è la BPSK
(Binary Phase Shift Keying)3. Lo schema di principiodella modulazione è riportato in figura 5 [1].
Il segnale portante L1 è modulato da duesequenze (bit train) : la prima costituita dallasomma modulo due del codice P (o Y) e del navi-gation message e l’altra costituita dalla sommamodulo due del codice C/A e del navigation mes-sage. Il segnale portante L2 è invece modulatodalla sola sequenza ottenuta come somma modulodue del codice P (o Y) e del navigation message.
I livelli minimi dei segnali che da specifica [5]devono essere garantiti in ricezione sono indicatinella tabella 1.
Essi variano in funzione dell’angolo di eleva-zione del satellite sull’orizzonte, in modo da avereun massimo intorno ai 40°, come riportato in figura6. I livelli massimi in ricezione non superanogeneralmente i –153,0 dBW per il codice civileC/A e –155,5 dBW per il codice protetto P (anchenella sua versione cifrata Y) sulla portante L1, e–158,0 dBW per entrambi i codici sulla portanteL2 [5].
Il NAVigation message è suddiviso in cinque sot-
tosequenze di 300 bit ciascuna, che contengono leseguenti informazioni [5]:• dati per la correzione dell’errore dovuto all’off-
set degli orologi atomici di bordo (sottose-quenza 1);
• dati delle effemeridi - ovvero delle funzionimatematiche che descrivono le orbite dei satel-liti con elevata precisione, consentendo al rice-vitore di conoscere in anticipo quanti e qualisatelliti sono visibili a una certa ora in un deter-minato luogo - valide per diverse ore (sottose-quenze 2 e 3);
Segnale L1P (dBW)
P (dBW)
f (Hz)
f (Hz)
2.046 MHz
1575,42 MHz20,46 MHz
1227,6 MHz20,46 MHz
Codice C/A
Codice P
Codice C/A: 1,023 MHz 1.023 bit
periodo: 1 ms
Codice P
Segnale L2
Codice P: 10,23 MHz 6,18 x 1012 bit
periodo: 7 giorni
C/AP
==
Coarse/AcquisitionPrecise ovvero Protected
Figura 4 Spettro dei segnali GPS.
(2) Il codice Gold è un codice generato mediante la somma modulo-due di due sequenze spread spectrum.
(3) La trasmissione BPSK avviene modulando la fase della portantecon un segnale binario: la fase resta invariata alla trasmissione di un1, mentre è invertita per la trasmissione di uno 0 (o viceversa).
Portante L1 1575,42 MHz BPSK
/ 2
BPSK
BPSK
Codice C/A 1,023 MHz
f0 = 10,23 MHzCodice P 10,23 MHz
Portante L2 1227,6 MHz
Messaggio di navigazione a 50 Hz
X
+
+
XL1
L2X
x 154
x 120
BPSKC/A
P
===
Binary Phase Shift KeyingCoarse/AcquisitionPrecise ovvero Protected
Somma modulo 2 MixerX+
Figura 5 Schema di modulazione dei segnali GPS.

NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 91
Coratella • Il Sistema GPS
• altri dati, tra cui i parametri per la correzionedell’errore dovuto ai ritardi ionosferici e leinformazioni temporali UTC (Universal TimeCoordinated) (sottosequenza 4);
• l’almanacco, che rappresenta una versione sem-plificata delle effemeridi, valida solo per pocheore, ma che consente tra l’altro di individuare icodici PRN di ciascun satellite senza doverprocedere per tentativi (sottosequenza 5).Le sottosequenze 4 e 5 sono poi strutturate cia-
scuna in venticinque pagine diverse di dati (analo-gamente alle sottopagine di una pagina del televi-deo). Per decodificare l’intero navigation message ènecessario un tracciamento continuo per almeno30 s (1.500 bit a 50 bit/s).
A titolo esemplificativo, vediamo il processo ditrasformazione eseguito dal ricevitore per ricavareil tempo UTC mediante l’uso dei parametri conte-nuti nel navigation message (figura 7) [1, 5]. Iltempo UTC viene utilizzato per marcare le posi-zioni (coordinate) individuate dal ricevitore, percui ogni rilievo di posizione è determinato dalla
terna di coordinate latitudine, longitudine e quota,più il tempo UTC della misura4. Inoltre, in talmodo il ricevitore sincronizza il suo orologiointerno.
Il monitoraggio del riferimento temporale nelsistema GPS è demandato al segmento di con-trollo. Il tempo di sistema è riferito al tempo zeroUTC, definito dall’USNO (United States NavalObservatory) coincidente con la mezzanotte del 5gennaio 1980. L’informazione di tempo elemen-tare è costituita da un contatore (a 19 bit) definitoTOW (Time Of Week), che conta da 0 a 403.199 unitàelementari in cui è suddivisa una settimana5.
Nella sottosequenza 1 del navigation message, ilsatellite invia al ricevitore questo contatore e
alcuni fattori di correzione (trasmessi dalle uploadstation a ciascun satellite, come descritto nel para-grafo 1), che gli consentono di determinare iltempo del satellite. Per valutare il tempo GPS ilricevitore utilizza ulteriori termini di correzione(legati alla posizione e all’orbita dei satelliti edagli effetti relativistici dovuti al moto relativosatellite-ricevitore solidale con la terra) contenutinelle sottosequenze 2 e 3 del navigation message.Infine, per passare dal tempo GPS (che è un
canaleC/A P (Y)
_ 160,0L1 _ 163,0_ 166,0L2 _ 166,0
livello minimo di potenza in ricezione [dBW]
C/ALPY
====
Coarse/Acquisitionportantecodice Preciso ovvero Protetto versione cifrata del codice Protetto (P)
Tabella 1 Livelli minimi in ricezione per i segnali GPS.
C/A _ L1
_157
dB/W
_160
_163
_166
0° 5° 20° 40° 60°Angolo di elevazione
80° 90° 100°
P _ L1
P _ L2 ovveroC/A _ L2
Live
llo d
i pot
enza
in r
icez
ione
C/APL
===
Coarse/Acquisitioncodice Protettoportante
Figura 6 Livelli minimi dei segnali GPS in ricezione.
TOW nel SV Parametri di clock
300 bit sottosequenza 1
Termini relativistici
TOW Delta tempo SV
Range SVal ricevitore
Termini UTC - GPS
TempoGPS
TempoGPS
Tempo SV
300 bit sottosequenza 2
300 bit sottosequenza 3
300 bit sottosequenza 4
Delta SV Time Posizione SV
e correzionerelativistica
CorrezioneUTC-GPS
dal tempo GPS al
tempo UTC nel
ricevitore
Effemeridi(dati 1)
Effemeridi(dati 2) Parametri UTC
Tempo UTC
GPSSV
TOWUTC
====
Global Positioning SystemSpace Vehicle (satellite GPS)Time Of WeekUniversal Time Coordinated
Fonte: Peter H. Dana
dal tempo nel SV
al tempo GPS nel SV
dal tempo GPS nel SV al tempo GPS nel ricevitore
dal TOW al tempo
nel SV
Figura 7 Determinazione del tempo GPS e del tempoUTC.
(4) L’informazione temporale è utilizzata anche nel caso in cui sullamisura rilevata debba essere applicata la correzione differenziale,descritta successivamente nel paragrafo 6.
(5) L’unità elementare citata è la sottosequenza X1, di lunghezza paria 15.345.000 bit, che viene sommata modulo 2 all’ulteriore sottose-quenza X2i per generare il codice P (che si ripete ogni settimana).403.200 di tali sottosequenze durano 6,187104 x 1012 bit, che è la lun-ghezza della sequenza P.

92 NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002
Coratella • Il Sistema GPS
tempo continuo) al tempo UTC (che come giàdetto viene periodicamente corretto), il ricevitoreutilizza le informazioni di correzione, contenutenella sottosequenza 4 nella pagina 18 del messag-gio, che consentono di raggiungere un errore mas-simo di 90 ns. I due riferimenti temporali sonoattualmente sfasati tra di loro di circa 15 s.
3. Fasi di acquisizione e di tracciamento
All’accensione, prima di effettuare il fixing (ovveroprima di determinare la propria posizione) un ricevi-tore GPS deve acquisire il maggior numero di satellitidella costellazione. Nel caso di accensione dopomolto tempo o quando operi in un’area geograficaassai diversa da quella in cui operava prima dello spe-gnimento, il ricevitore non dispone di informazioniutili per ottimizzare la ricerca.
Esso deve perciò:• cercare tutti i satelliti in visibilità effettuando
una correlazione tra i codici pseudocasuali rice-vuti e le repliche dei codici stessi generatelocalmente;
• demodulare il navigation message di un satelliteagganciato, per ottenere alcuni parametri quali:il riferimento temporale, le posizioni orbitali(almanacco, effemeridi), le correzioni ionosferi-che da applicare. Deve anche mantenere neltempo i satelliti agganciati.La catena di r icezione contiene un certo
numero di canali (tipicamente non inferiore adodici) e un numero elevato di correlatori che ope-rano in parallelo e che effettuano la correlazionetra il codice pseudocasuale ricevuto da ciascunsatellite e una copia generata localmente. Un rive-latore di picco consente di determinare il valore
massimo della funzione di correla-zione e di agganciare il satellite.
La ricerca è effettuata contem-poraneamente sulla finestra deicode delays (ovvero su un periodotemporale pari a 1023 tempi dibit) e su quella degli scostamentidi frequenza (e cioè su una bandapari a 8,4 kHz, generata dall’ef-fetto Doppler causato dal motodei satelliti e dalla rotazione ter-restre), impiegando blocchi ele-mentari detti bins (figura 8) [6].
Se si suddivide lo spazio delle fre-quenze di 8,4 kHz in 40 bins e si ana-lizza ciascun bin, ad esempio, in untempo medio di 1 ms, nel peggioredei casi (esplorazione completa ditutta l’area di ricerca) l’acquisizionedei satelliti richiede circa 40 s.
Dopo l’acquisizione, il ricevitoredemodula il navigation message perdeterminare sia i parametri necessariper le successive acquisizioni e per iltracciamento (tracking), sia i riferi-menti temporali per effettuare lemisure di pseudodistanza (pseudo-range), necessarie per determinare la
posizione (fixing).Il tempo complessivo necessario per effettuare
il fixing dipende quindi dal livello di aggiorna-mento dei dati del navigation message. Esso si defi-nisce come TTFF (Time To First Fix) e dipende dalTSLF (Time Since Last Fix).
Nella tabella 2 sono indicate le durate tipicheriportate in letteratura, ottenute come valori mediper un ricevitore GPS di classe intermedia.
4. Determinazione della posizione di un punto (fixing): misure di codice e misure di fase
Il fixing è ottenuto a partire dalla misura delledistanze del ricevitore dal maggior numero di satelliti invisibilità. Per valutare queste distanze è necessariomisurare il cosiddetto TOA (Time Of Arrival), ovvero iltempo che il segnale radio, emesso dal satellite, impiega araggiungere il ricevitore in un preciso istante temporale.
bin0 100
4
1
0,9
Funz
ione
di c
orre
lazi
one
norm
aliz
zata
0,8
0,7
0,6
0,5
0,40,3
0,2
0,1
0
32
10
-1-2
-3-4 200 300 400500
600 7008009001000
Sfasamento Doppler(kHz)
Ritardo del codice(chip)
1 chip = 1 bit di codice
Figura 8 Spazio di ricerca del segnale GPS per l’acquisizione iniziale.
tipo di avviosnap start
hot startcold start
TSLF< 30 min
30 min < TLSF < 2 3 h> 2 3 h
TTFF2 3 s
8 10 s> 20 s
TSLFTTFF
==
Time Since Last FixTime To First Fix
Tabella 2 Valori tipici del Time to First Fix, al variare delTime Since Last Fix.

NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 93
Coratella • Il Sistema GPS
La distanza può essere determinata in duemodi: mediante una misura di pseudodistanzaoppure con una misura di fase. Nel primo caso siutilizza lo stesso codice pseudocasuale utilizzatoper l’acquisizione, e si considerano l’istante diricezione del picco di correlazione più le infor-mazioni decodificate dal navigation message checonsentono di risalire all’istante di emissionedel segnale da ciascun satellite. La differenzatemporale è moltiplicata per la velocità della lucenel mezzo, che, da specifica [5], risulta essere
v = 299.792.458 m/s
Si ottengono perciò equazioni del tipo:
dove • Xs, Ys, Zs sono le coordinate del satellite i-
esimo; • Xp, Yp, Zp sono le coordinate incognite del
punto; • t - t0 (intervallo di integrazione) è il tempo che
il segnale impiega per arrivare dal satellite alricevitore.Nell’equazione (1) è stato utilizzato l’integrale
della velocità nel tempo invece del semplice pro-dotto della velocità per il tempo, perché la velocitàdel segnale non è costante (cioè pari alla velocitàdella luce nel vuoto), ma varia con le caratteristichefisiche degli strati atmosferici da esso attraversati.
L’istante t che compare nella relazione precedenterappresenta l’istante di arrivo del segnale a terramisurato dall’orologio del satellite. In realtà il ricevi-tore effettua la misura all’istante t′ = t + ∆t dove ∆t èlo sfasamento tra l’orologio integrato al suo interno equello del satellite. Infatti, nonostante la sincronizza-zione (descritta nel paragrafo 2), l’orologio del ricevi-tore essendo di basso costo è soggetto a deriva (drift).
Per determinare la posizione di un punto nellospazio le incognite sono perciò quattro: le tre coor-dinate del punto Xp, Yp e Zp oltre allo sfasamentodt. Sono quindi necessarie quattro equazioni deltipo (1), ovvero occorre effettuare misure daalmeno quattro satelliti. Nel caso in cui sia suffi-ciente determinare la posizione sul piano, sonosufficienti tre equazioni.
Il punto è determinato, in maniera intuitiva,come l’intersezione di sfere aventi come centro la
posizione dei satelliti utilizzati; le misure ottenutedal quarto satellite servono anche per discriminaretra i due punti che si otterebbero con tre satelliti(figura 9).
Nei casi pratici, anche per effetto degli errori,la soluzione è determinata solo in maniera appros-simativa. I ricevitori sono in grado di ricevere isegnali provenienti da più di quattro satelliti (rice-vitori con otto o con dodici canali), per cui siottiene un sistema sovradimensionato di n equa-zioni (n > 4) con quattro incognite, la cui soluzioneè ottenuta utilizzando il metodo dei minimi quadrati.
La precisione teorica ottenibile con questometodo (prescindendo dagli errori sistematici, chesono esaminati nel paragrafo successivo) è limitatadalla velocità di cifra del segnale con cui si opera.
Nel caso si utilizzi il codice C/A (Coarse / Acquisition),la cui velocità di cifra è pari a 1,023 Mbit/s, la duratadi un bit è pari a circa 97,75 µs, tempo in cui allavelocità della luce il segnale percorre circa 293 m.È possibile d’altra parte misurare lo sfasamentotemporale dei due segnali con precisione pari all’1
X t X Y t Y Z t Z v dS P S P S P t
t0
2
0
2
0
2
0( ) −[ ] + ( ) −[ ] + ( ) −[ ] = ⋅∫
τ
Figura 9 Determinazione del punto come intersezionedi tre sfere.
Portante ricevuta dal satellite
Sinusoide generata dal ricevitore
Sfasamento fra sinusoide
e portante
Satellite
Ricevitore
N (t0)
N (t0) e N (t1) rappresentanoil numero di lunghezze d’onda fra il satellite e il ricevitore, rispettivamente al tempo t0 e t1
N (t1)
t0t1
Satellite
Figura 10 Misure di fase.
(1)

94 NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002
Coratella • Il Sistema GPS
per cento della durata di un bit. L’errore teorico diposizione - prescindendo, come si è detto, daglieffetti degli errori sistematici - è quindi di circa2,93 m.
In alternativa all’uso dei codici, per la valuta-zione della distanza tra il satellite e il punto darilevare, possono essere utilizzate le misure effet-tuate sulla fase dell’onda portante del segnale.
Il sistema si basa sul confronto tra la fase dellaportante generata dal satellite e ricevuta a terra, equella di un analogo segnale generato dal ricevitore.Lo scostamento rilevato è la frazione di lunghezzad’onda tra i due segnali, mentre il numero intero dicicli d’onda costituisce un’ulteriore incognita, definitaambiguità iniziale, che è determinata con altri metodi,ad esempio mediante le misure di pseudodistanza(figura 10).
Miscelando le due portanti si ottiene una seriedi battimenti, la cui fase corrisponde alla diffe-renza di fase delle due portanti.
In ciascun istante t può essere impiegata un’e-quazione del tipo:
dove, nel secondo membro dell’uguaglianza(che esprime la differenza misurata tra le fasi deisegnali del satellite e del ricevitore), F(t) è la fasedei battimenti, N è l’ambiguità iniziale, f è la fre-quenza, dt è lo sfasamento tra i due orologi (sulsatellite e nel ricevitore).
La precisione teorica (sempre al netto degli
effetti degli errori intrinseci) è legata in questocaso alla capacità di discriminare l’inizio di unciclo (ovvero, ad esempio, il passaggio per lo zerodella portante). Supponendo di poter distinguereun centesimo della lunghezza d’onda (che comegià detto al paragrafo 2 è pari a circa 19 cm) siottiene un’accuratezza pari a circa 2 mm.
5. Analisi degli errori presenti nel sistema GPS
Le accuratezze finora indicate sono valori soloteorici, che non tengono in considerazione l’ef-fetto di un certo numero di errori. Alcuni di essisono legati a fenomeni fisici, altri sono invecedovuti a limitazioni tecnologiche.
Nei punti che seguono sono descritte brevementele maggiori fonti di errore ed è indicata la tecnicaeventualmente utilizzabile per eliminarli o, quantomeno, per ridurne gli effetti [2]. Nel punto 5.8 è indi-cato, a titolo di esempio, il valore medio dell’errorecomplessivo che inficia l’accuratezza di un tipico rice-vitore GPS per impieghi civili o per quelli militari.Nel paragrafo 6 è spiegato il principio della tecnica dicorrezione differenziale.
5.1 Errori nella determinazione della posizione dei satelliti e “Selective Availability”
Fino al 30 aprile 2000 il DoD (Department ofDefence) statunitense ha limitato la precisione otte-nibile in tempo reale dai ricevitori di uso civile,inserendo nel messaggio di navigazione alcunierrori ad hoc nel valore delle effemeridi.
PRINCIPIO DI FUNZIONA-MENTO DEL GPS
All’accensione, un ricevitore GPSeffettua una ricerca dei satelliti nelproprio campo visibile, cercando disintonizzarsi sui segnali da essi tra-smessi. La ricerca è molto velocenel caso in cui esso disponga dialcune informazioni ricevute daglistessi satelliti (nel corso di una pre-cedente sessione di misura), oppor-tunamente memorizzate e periodi-camente aggiornate.
Per determinare un punto dello spa-zio il ricevitore deve disporre deisegnali di almeno quattro satelliti (leincognite sono le tre dimensioni spa-ziali più il tempo). Qualora sia suffi-ciente una misura nel piano, si pos-sono utilizzare i segnali provenientida tre satelliti. A livello applicativosono, inoltre, disponibili programmisoftware e/o strumenti inerziali (ad
esempio l’odometro) che consentonodi tracciare posizione, velocità eaccelerazione, sopperendo a momen-tanee interruzioni nella ricezione deisegnali dai satelliti.
Tutti i ricevitori GPS determinanola propria posizione misurando lepseudodistanze dai satelliti; questivalori sono ricavati misurando ledifferenze temporali tra gli istantidi generazione dei segnali da partedi ciascun satellite (noti a valledella sincronizzazione iniziale degliorologi) e quelli di ricezione. I rice-vitori più sofisticati sono in grado dimisurare anche lo sfasamento tra isegnali portanti emessi dai satellitie le repliche degli stessi segnaligenerati localmente nel ricevitore.
Le accuratezze raggiungibili varianoa seconda della complessità e delcosto del ricevitore. Dopo la soppres-sione di un particolare errore
(descritto al paragrafo 5.1) inseritodal Governo degli Stati Uniti (pro-prietario del sistema GPS), oggianche i ricevitori più semplici (delcosto di qualche centinaio di € ) con-sentono di raggiungere un’accura-tezza pari a circa 15 – 20 m nel 67 percento dei casi.
I ricevitori più costosi (ad esempioper applicazioni geodetiche) con-sentono accuratezze dell’ordine delcentimetro (ottenute mediante cor-rezione differenziale).
Il principio della correzione diffe-renziale, utilizzato anche in elettro-nica, consente di ridurre gli effettidi elementi di errore che com-paiono con lo stesso segno e conampiezza uguale o simile su duemisure (termini di modo comune).Sottraendo tra loro le misure, questitermini scompaiono ovvero sonodrasticamente attenuati.
X t X Y t Y Z t ZF t N f d
S P S P S P
t
0
2
0
2
0
2( ) −[ ] + ( ) −[ ] + ( ) −[ ]= ( ) + + ⋅
λ(2)

NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 95
Coratella • Il Sistema GPS
Questi errori, che influiscono solo sulla deter-minazione del le misure di pseudodistanzamediante il codice C/A, sono noti con l’acronimoS/A (Selective Availability). A partire dal 1° maggio2000, su mandato dell’allora Presidente degli StatiUniti, Bill Clinton, il DoD ha soppresso questoerrore, riservandosi comunque la facoltà di reinse-rirlo, anche su scala locale, qualora lo ritenesseopportuno (in occasione ad esempio di crisi inter-nazionale o di conflitto). In ogni caso, questi errorisono di tipo sistematico e rientrano nella classedegli errori cosiddetti di modo comune, eliminabilicioè utilizzando tecniche differenziali.
5.2 Offset degli orologi dei satelliti e del ricevitore
L’intera costellazione satellitare, per potereffettuare il fixing, deve essere sincronizzata sulcosiddetto GPS time, correggendo il ritardo tempo-rale relativistico dovuto all’elevata velocità di rota-zione dei satelliti rispetto al suolo (14.040 km/h).
Gli orologi atomici di bordo (oscillatori al cesio eal rubidio) hanno una stabilità pari a circa una partesu 1012 su un arco temporale di 24 ore. L’errore tem-porale accumulato in un giorno è quindi di circa8,64x10-8s, intervallo di tempo in cui il segnaleradio percorre circa 26 m. Nell’algoritmo che con-sente di determinare le suddette correzioni si ipo-tizza poi che le orbite dei satelliti siano perfetta-mente circolari; in realtà il raggio presenta inveceun’escursione massima di circa il 2 per cento(ovvero circa 400 km). L’errore non compensatosugli orologi atomici di bordo può arrivare perciò acirca 46 ns.
Anche le misure temporali possono essere alte-rate dal DoD mediante l’introduzione di un errore(S/A), che comunque si elimina con le tecnichedifferenziali.
Gli orologi inseriti nei ricevitori non sono moltocostosi e quindi precisi, per cui l’errore temporale daessi introdotto è maggiore rispetto a quello sopradescritto. Anche questo errore è, però, di modo comunee quindi è eliminabile con tecniche differenziali.
5.3 Ritardi dovuti a riflessioni ionosferiche
Nell’attraversare la ionosfera il segnale è cur-vato a causa di riflessioni microscopiche. L’effettoè variabile sia nel breve termine (fluttuazioniistantanee) sia nel medio e nel lungo termine(variazioni stagionali).
La divergenza ionosferica provoca i seguentieffetti:• la velocità del segnale radio diminuisce in pro-
porzione al numero di elettroni liberi presentinella ionosfera; il ritardo risulta direttamenteproporzionale all’inverso del quadrato della fre-quenza della portante;
• la fase della portante è invece anticipata dellastessa entità.Il fenomeno, poi, non è uniforme nel tempo e
differisce a seconda delle latitudini: normalmentela ionosfera si comporta in modo stabile nel temponelle zone temperate, mentre ha caratteristiche
radioelettriche molto variabili in prossimità dell’e-quatore e dei poli.
Una maniera per eliminare, o quantomeno perridurre, l’errore consiste nel definire il rallenta-mento del segnale dovuto a condizioni ionosferi-che medie per ciascuna zona della terra e per cia-scun periodo di tempo, e nell’inviare i parametrimedi nella sottotrama quattro del navigation mes-sage.
Questi parametri sono utilizzati dai ricevitori diminor costo per correggere i ritardi quando effet-tuano misure della posizione in modo assoluto(non differenziale). Se si utilizza, invece, la tecnicadifferenziale è possibile ridurre in modo più soddi-sfacente questi errori, purché la distanza tra il rice-vitore, di cui si vuol conoscere la posizione, e ilricevitore di riferimento non superi i 20÷30 km(supponendo costanti in tale area le caratteristicheionosferiche).
Ricevitori più sofisticati detti a doppia frequenzasono in grado di correggere da soli in modo soddi-sfacente i ritardi in oggetto in quanto possonoeffettuare misure su entrambe le frequenze fL1 edfL2. Il rallentamento di un’onda elettromagneticache attraversa la ionosfera è infatti inversamenteproporzionale al quadrato della frequenza, per cui,confrontando i tempi di arrivo dei due segnali, sirisale al rallentamento che ciascuno di essi hasubito.
In questo caso [5], detto quindi PR il valore dipseudodistanza corretto da determinare, e PRL1 ePRL2 le misure di pseudodistanza effettuate alledue frequenze fL1 ed fL2, vale la relazione:
(3)
5.4 Ritardi dovuti a rifrazioni troposferiche
Nell’attraversare la troposfera, il segnale è ral-lentato a causa di numerose microscopiche rifra-zioni con le particelle che la compongono. Anchequesti effetti sono variabili sia nel breve terminesia nel medio e nel lungo termine (variazioni sta-gionali) e dipendono dalle escursioni di tempera-tura, umidità e pressione.
L’errore, analogamente a quello ionosferico, siattenua considerando il rallentamento del segnaledovuto a condizioni troposferiche medie per cia-scuna zona della terra e per ciascun periodo ditempo, e inviando i parametri medi nella sotto-trama quattro del navigation message. In alternatival’errore è eliminabile con la tecnica differenziale.
5.5 Percorsi multipli in ricezione
L’errore dovuto ai percorsi multipli (multipath)è quello più difficilmente eliminabile.
Il segnale trasmesso dai satelliti subisce, infatti,una serie di riflessioni e rifrazioni indotte dagli
PR
PRf
fPR
f
f
LL
LL
L
L
=
−
⋅
−
21
2
2
1
1
2
2
1

Coratella • Il Sistema GPS
ostacoli che si ritrovano sul cammino diretto versoil ricevitore. Esso quindi si scompone in piùsegnali che seguono percorsi diversi e che giun-gono al ricevitore in istanti anch’essi differenti.
Nel caso di misure statiche e non in tempo reale, l’er-rore può essere ridotto facendo crescere la durata dellarilevazione, in modo da eliminare statisticamente i con-tributi delle componenti di segnale più deboli (chequindi hanno subito un maggior numero di riflessioni).
Per le stazioni fisse si adoperano antenne dibuona qualità che abbiano una scarsa sensibilità
per bassi angoli di incidenza dei segnali, e che uti-lizzano un piano di massa o un choke ring6. Questa
ACCURATEZZA DEL GPS DAL PUNTO DI VISTA STATISTICO
Gli errori che influenzano la determinazione della posizione non sono costanti mavariabili nel tempo. Nel valutare perciò la precisione di uno strumento GPS occorrefornirne l’accuratezza, che deve essere però sempre associata a un certo intervallodi confidenza [3].
In un generico esperimento ripetibile per la misurazione di una grandezza fisica, il risul-tato ottenuto è sempre affetto da errori intrinseci (oggettivi e soggettivi), che consentonosolo di stimare un valore atteso o presunto della grandezza stessa. Si associa in pratica alvalore stimato un intervallo di confidenza, oppure si esprime la percentuale di volte incui, nel caso di successive ripetizioni dell’esperimento di misura, si ottiene statistica-mente il valore indicato.
A questo scopo sono necessarie le seguenti ipotesi:
a) La densità di probabilità (ddp) dell’errore in ciascuna delle tre dimensioni è gaus-siana.
Quest’ipotesi non è vera per l’errore di selective availability introdotto artificialmente che èdeterministico (paragrafo 5.1). Gli errori residui per misure differenziali (paragrafo 6) sonogaussiani se le misure sono mediate su un intervallo temporale sufficientemente lungo; perbrevi intervalli di misura (qualche minuto) è invece dominante il contributo di errore dovuto aipercorsi multipli in ricezione, che è quasi costante.
b) La densità di probabilità dell’errore sul piano orizzontale è circolare.
Se l’errore sui due assi del piano è gaussiano, la ddp bidimensionale è una superficie aforma di campana le cui sezioni piane sono in genere delle ellissi. Solo nel caso in cui legaussiane lungo i due assi presentano le stesse deviazioni standard, la sezione piana dellasuperficie è una circonferenza.
In queste ipotesi, per la grandezza misurata x si fornisce abitualmente il valore:
x = µ ± σ
dove µ è il valore medio della curva gaussiana e σ rappresenta la deviazione standard. Lemisure si addensano cioè intorno all’asse di simmetria della densità di probabilità gaus-siana che rappresenta il valore medio µ e, in circa il 67 per cento dei casi, esse sono com-prese tra (µ - σ) e (µ + σ).
La precisione ottenibile deve essere perciò riferita alla percentuale di volte in cui media-mente la precisione è raggiunta, e può essere espressa in termini di:
•RMS deviazione standard, ovvero radice quadrata della media degli errori quadra-tici, nota anche come 1s;
•2DRMS due volte (twice Distance) il valore della lunghezza espressa in RMS, usatoanche per indicare misure bidimensionali;
96 NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002
(6) Il segnale ricevuto è composto da una componente diretta e una rifles-sa, relativa ai percorsi multipli. Un piano di massa choke ring è realizzatomediante diversi anelli conduttori concentrici che circondano il centro difase dell’antenna, consentendo di cancellare (o attenuare) la componenteriflessa. La cancellazione è solitamente più efficace per sorgenti di segnaleprossime allo zenith (verticali), mentre è minima se prossime all’orizzonte.

Coratella • Il Sistema GPS
soluzione consente di schermare le riflessioni dalsuolo; inoltre, per eliminare i segnali riflessi chegiungono al ricevitore con angoli elevati occorreposizionare il ricevitore lontano dagli eventualiostacoli.
Gli ostacoli vicini, qualora siano costituiti dabuoni conduttori, possono infatti far spostare il cen-tro di fase dell’apparato di ricezione. In casi estremiessi possono causare errori superiori a 15 m.
Per i ricevitori mobili possono essere utilizzatecorrezioni standard, quando siano noti i comporta-
menti del ricevitore in presenza di segnali multi-path minimi (condizioni ottimali) o elevati (condi-zioni standard).
5.6 Rumore al ricevitore
Anche gli strati più bassi dell’atmosfera, densidi vapore acqueo, determinano ulteriori perturba-zioni, tanto maggiori quanto più spesso è lo stratoda attraversare, cioè quanto minore risulta l’an-golo di elevazione del satellite (i ricevitori GPS
•CEP raggio di un cerchio centrato nell’antenna del ricevitore, contenente il 50 percento dei punti su cui mediare per ottenere la misura sul piano;
•R95 raggio di un cerchio centrato nell’antenna del ricevitore, contenente il 95 percento dei punti su cui mediare per ottenere la misura sul piano;
•SEP raggio di una sfera centrato nell’antenna del ricevitore, contenente il 50 percento dei punti su cui mediare per ottenere la misura nello spazio.
Nella maggior parte dei casi la precisione di un ricevitore GPS è indicata in termini di RMS (RootMean Square) sul piano orizzontale, o come CEP (Circular Error Probable). Alcune volte sitrovano precisioni espresse in 2DRMS. Le misure possono essere inoltre mono-, bi- o tridimen-sionali, a seconda che si voglia determinare solo una quota, una posizione orizzontale su di unpiano, o una posizione nello spazio.
Nella tabella A si riportano i principalitipi di precisione con cui si caratterizzauno strumento GPS.
Nella tabella B si riportano i fattori mol-tiplicativi, riportati in letteratura, per laconversione tra questi tipi di misura,determinati statisticamente sulla base diun campione di circa due milioni dipunti rilevati mediante GPS con correzionedifferenziale e validi per circa il 62 percento dei casi. Per la loro determina-zione sono state considerate le seguentiipotesi: errori lineari gaussiani; ddp cir-colare nel piano; PDOP/HDOP = 2,1 eVDOP/HDOP = 1,9.
a RMSdi quota
12,271,891,10,910,911,14
0,4410,830,480,420,40,5
0,531,210,590,50,480,59
0,912,11,710,830,831,04
1,12,421,210,911,18
1,12,52,11,21,111,27
0,882,01,70,960,85
0,791
da RMS di quotada CEP sul pianoda RMS sul pianoda R95 sul pianoda 2DRMS sul pianoda RMS in 3-Dda SEP in 3-D
a CEPsul piano
a RMSsul piano
a R95sul piano
a 2DRMSsul piano
a RMSin 3-D
a SEPin 3-D
2DRMSCEP
RMSSEP
====
twice Distance RMS oppure 2 Dimensional RMSCircular Error ProbableRoot Mean SquareSpherical Error Probable
Tabella B Fattori moltiplicativi per la conversione tra diversi tipi di misura.
dimensioni tipo di precisione
probabilità %
utilizzo tipico
1 RMS 68 misure di quote2 CEP 50 misure sul piano
2 R95 95 misure sul piano2 RMS misure sul piano63 68
2 2DRMS misure sul piano95 983 RMS misure tridimensionali61 683 SEP misure tridimensionali50
2DRMSCEP
RMSSEP
====
twice Distance RMS (oppure 2 Dimensional RMS)Circular Error ProbableRoot Mean SquareSpherical Error Probable
Tabella A Principali tipi di precisione con cui si caratte-rizzano le misure con uno strumento GPS.
NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 97

98 NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002
Coratella • Il Sistema GPS
scartano in modo automatico i segnali provenientida satelliti con angoli di elevazione minori di 10°sull’orizzonte). Il contributo dovuto a questa per-turbazione è definito rumore in ingresso al ricevi-tore e si presenta sia nelle misure di pseudodi-stanza sia in quelle di fase ed è difficilmente eli-minabile.
In questa fonte di errore ricade anche quellolegato alle caratteristiche tecnologiche dellostesso ricevitore. L’uso in passato di soli uno odue canali per l’aggancio di più satelliti rendeva,ad esempio, più lunga e complessa l’acquisizione,con perdita di sensibilità del ricevitore. Oggi nor-malmente un ricevitore commerciale dispone diotto o dodici canali di tracking e di una batteria dicorrelatori che consentono di rilevare più veloce-mente picchi di mass ima correlazione t ra i lsegnale ricevuto e quello generato localmente.
Anche il software limitato dei vecchi ricevitori,basati su microprocessori a otto bit, ha contribuitoin passato a limitare le prestazioni: con misure didistanze di oltre 20mila km è richiesta, infatti,una precisione di almeno dieci cifre. L’uso di chipmolto più evoluti consente oggi di contenere que-sto tipo di errore al di sotto del metro.
5.7 Errori dovuti alla disposizione geometrica deisatelliti nel campo visibile
Gli errori finora descritti sono quelli di naturafisica o tecnologica, i cui contributi si sommanotra loro e pregiudicano l’accuratezza di ogni sin-gola misura che il ricevitore effettua sul segnale diogni satellite.
È presente, però, anche un errore legato allamodalità di esecuzione del rilievo (posiziona-mento), che si basa sulla triangolazione di piùmisure.
Come avviene per tutte le misure ottenute pertriangolazione, la precisione del posizionamentomediante GPS è limitata dalla disposizione nelcampo visibile dei satelliti monitorati dal ricevi-tore.
I l parametro GDOP (Geometr ic Dilut ion OfPrecision) indica in ogni istante la bontà della con-figurazione satellitare e costituisce un fattore mol-tiplicativo del valore quadratico medio dei singolierrori.
Il caso di un GDOP pari a uno corrisponde-rebbe all’evento (solo ideale) in cui i satelliti fos-sero distribuiti in tutte le possibili direzioni dellospazio. In realtà per un ricevitore posto su unqualsiasi punto della superficie terrestre, anche sumare aperto, non è possibile osservare i satellitinel semispazio a l di sotto di esso , per cui imigliori valori di GDOP sono difficilmente infe-riori a due (questo è anche uno dei motivi per cuila precisione planimetrica ottenibile è sempremaggiore della precisione altimetrica).
Satelliti che siano visti sotto un basso angolo dielevazione non consentono poi misure precise, acausa del maggiore rallentamento del segnaledovuto all’attraversamento di strati atmosfericipiù spessi. Se i satelliti, nel corso dei moti orbitali
da essi descritti e a causa degli ostacoli che limi-tano la visibilità ottica del ricevitore, tendono araggrupparsi in un certo settore sferico, il GDOPcresce; un buon valore di GDOP generalmentenon è superiore a 4.
Il GDOP può essere scomposto secondo laclassica relazione vettoriale nella componente ver-ticale VDOP (Vertical Dilution Of Precision) e plani-metrica HDOP (Horizontal Dilution Of Precision);questa seconda componente può essere ulterior-mente scomposta nelle sue componenti ortogonaliorientate NDOP (North-axis Dilution Of Precision) eEDOP (East-axis Dilution Of Precision).
5.8 Determinazione dell’errore medio complessivo
In tabella 3 sono riportati alcuni valori tipicipresenti in letteratura per gli errori descritti neiprecedenti sottoparagrafi, relativi a ricevitori dimedie prestazioni (uno civile, l’altro militare).L’errore di disponibilità selettiva (selective availa-bility), pur non essendo più presente, secondoquanto affermato nel paragrafo 5.1, è citato atitolo di confronto.
Poiché le fonti di errore sono tra loro scorre-late, l’errore equivalente, definito UERE (UserEquivalent Range Error), è ottenuto come valorequadratico medio dei singoli errori (si sommano iquadrati degli errori, e si calcola la radice quadratadel totale). Ad esso occorre applicare il fattoremoltiplicativo del GDOP (descritto nel prece-dente paragrafo 5.7), assunto in tabella pari aquattro, per ottenere il valore dell’accuratezzaorizzontale 2DRMS, ovvero con un intervallo diconfidenza pari al 95÷98 per cento (si veda ilriquadro a pagina 96).
6. Tecniche di correzione differenziale deglierrori GPS
6.1 Generalità
Mediante l’utilizzo di due o più ricevitori è
Sorgente di erroreErrore tipico (metri)
codice civile C/A
codice militare P
disponibilità selettiva 24,0ionosfera 7,0troposfera 0,7clock dei satelliti ed effemeridi 3,6percorsi multipli in ricezione 1,8rumore in ingresso al ricevitore 1,5
UERE 25,4
Accuratezza nel piano (intervallo di confidenza 2DRMS),per GDOP=4
101,5
0,00,010,73,61,20,6
3,9
15,6
2DRMSGDOPUERE
===
twice Distance RMS oppure 2 Dimensional RMSGeometric Dilution of PrecisionUser Equivalent Range Error
Fonte: Internet
Tabella 3 Valori tipici degli errori in metri per i ricevitoricivili e militari.

NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 99
Coratella • Il Sistema GPS
CORREZIONI DIFFERENZIALI PER MISURE GPS
La correzione differenziale può essere effettuata sulle misure determinate dai ricevitori GPS indue modi: in post processing o in real time. In entrambi i casi, il ricevitore è dotato di unopportuno software di elaborazione, che sincronizza temporalmente le misure in modo chesia le misure dirette sia i parametri di correzione siano relativi allo stesso istante temporale,misurato avendo come riferimento il tempo GPS o il tempo UTC (Universal TimeCoordinated). I due riferimenti hanno una precisione molto elevata e sono sfasati di circa 15 s.
Nella modalità in post processing i parametri di correzione sono organizzati in archivi (file),ciascuno dei quali contiene in genere i dati relativi a un’ora (ad esempio dalle 10:00 alle 10:59e 59 secondi) secondo lo standard RINEX (Receiver INdependent EXchange format).
I calcoli sono di norma effettuati utilizzando un PC sul quale sono installati gliopportuni software, che accettano in ingresso le misure dirette effettuate dal ricevi-tore GPS e i suddetti file di correzione.
Nella modalità in realtime la correzione diffe-renziale è effettuatadirettamente nel ricevi-tore GPS, nel cuifirmware è installato ilprogramma di calcolo. Iparametri di correzionesono inviati al ricevi-tore o mediante tra-smissione radio (canaliUHF) oppure più direcente, mediante l’uti-lizzo della trasmissionedati su rete radiomo-bile. Il protocollo stan-dard uti l izzato èl’RTCM SC-104 (cheha assunto il nomedal Radio TechnicalCommission for Marittime services, Special Committee 104 che lo ha definito).
Per comprendere a livello di esempio come sia possibile eliminare gli errori descritti alparagrafo 5, è opportuno introdurre le seguenti grandezze [4] riportate in tabella A.
Per un generico ricevitore GPS valgono le due relazioni:
Se due ricevitori ricevono il segnale dallo stesso satellite, può essere applicata un’e-quazione alle differenze singole che rappresenta la differenza di cammino otticopercorso dal segnale per raggiungere i due ricevitori. La posizione di uno dei ricevi-tori è assunta come nota e si determina la posizione dell’altro rispetto al primo.
Se le osservazioni avvengono nello stesso istante è possibile eliminare o ridurre gli errori nel calcolodella posizione dei satelliti e quelli dovuti agli sfasamenti degli orologi di bordo. Differenziando le(1) e indicando con Pri e Cri le misure riferite al ricevitore i-esimo, possiamo infatti scrivere:
distanza misurata tra satellite e ricevitore con la tecnica della pseudodistanza, affetta da erroreP
distanza misurata tra satellite e ricevitore con la tecnica della fase, affetta da erroreC
distanza effettiva (range) tra il satellite ed il ricevitoreR
errore nel posizionamento del satellite, indotto dal DoD come selective availabilityES
errore dovuto agli offset degli orologi a bordo dei satellitiECS
errore dovuto al ritardo del segnale causato dalle riflessioni ionosfericheEI
errore dovuto al ritardo del segnale causato dalle rifrazioni troposfericheET
errore dovuto all’offset dell’orologio del ricevitoreECR
errore dovuto al percorso multiplo in ricezione per la misura della pseudodistanzaEMP
errore dovuto al percorso multiplo in ricezione per la misura di faseEMC
errore dovuto al rumore del ricevitore sulle misure della pseudodistanzaENP
errore dovuto al rumore del ricevitore sulle misure di faseENC
lunghezza d’onda della portante L1 (19,05 cm) o L2 (24,45 cm)
numero intero di cicli che costituiscono l’ambiguità inizialeN
DoD = Department of Defence
Tabella A Grandezze caratteristiche degli errori presenti nel sistema GPS.
P R E E E E E E E
C R E E E E E E E NS CS I T CR MP NP
S CS I T CR MC NC
= + + + + + + += + + − + + + + + ⋅λ
(1)
dP P P dR dE dE dE dE dE
dC C C dR dE dE dE dE dE dNr r r I T CR MP NP
r r r I T CR MC NC
= − = + + + + += − = − + + + + + ⋅
2 1
2 1 λ(2)

100 NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002
Coratella • Il Sistema GPS
Può essere osservato che nella seconda relazione compare il termine relativo all’ambiguità ini-ziale (numero intero di cicli d’onda). In realtà le due osservazioni non avvengono esattamentenello stesso istante. È necessario tuttavia che lo sfasamento temporale sia contenuto entro pochimillisecondi nel caso di misure di pseudodistanza, e in pochi microsecondi nelle misure di fase.
Nelle relazioni sopra riportate sono ancora presenti i contributi di errore relativi alladeriva degli orologi dei ricevitori, ai percorsi multipli e al rumore di ricezione, non-ché l’errore legato all’ambiguità iniziale.
Se due ricevitori ricevono contemporaneamente i segnali da una stessa coppia di satelliti,è poi possibile scrivere le equazioni alle differenze doppie. Esse possono essere ottenutesottraendo tra loro le differenze singole ottenute con ciascun satellite. Indicando con:
le differenze per il satellite con maggiore elevazione, assunto come riferimento,le differenze valutate secondo le relazioni (2) per un altro satellite tracciato,
si ottengono le seguenti equazioni:
Queste differenze doppie consentono di eliminare l’errore dovuto alla deriva degli oro-logi dei ricevitori. I due contributi ddEI e ddET, relativi ai ritardi dovuti rispettiva-mente agli effetti ionosferici e troposferici, possono ritenersi trascurabili per distanzetra i ricevitori inferiori a 20÷30 km. Restano solo i contributi di errore causati dai per-corsi multipli e dal rumore in ingresso ai ricevitori, oltre all’ambiguità iniziale.
Gli errori residui dovuti ai ritardi iono- e troposferici possono essere eliminati (o ulterior-mente ridotti) in base a quanto già chiarito nei paragrafi 5.3 e 5.4 (tabella B).
Per eliminare l’ambi-guità iniziale, presenteesclusivamente nellemisure di fase, è suffi-ciente determinare ledifferenze doppie indue successivi istantidi tempo t1 e t2 (epo-che) e sottrarle traloro, ottenendo lecosiddette equazionialle differenze triple:
nelle quali, come si è già detto, sono stati trascurati i contributi di errore dovuti aglieffetti iono- e troposferici.
Le uniche incognite rimaste, implicite nella misura del dddR (differenza tripla applicata alledistanze effettive tra i satelliti ed i ricevitori), sono le differenze lungo i tre assi tra le coordinatedel ricevitore mobile e quelle del ricevitore fisso. Queste equazioni possono essere utilizzateogniqualvolta, nel corso di una sessione di misura, ricompare l’ambiguità iniziale a causa delmomentaneo sganciamento del segnale ricevuto da un satellite (fenomeno noto come cycle slip).
Il calcolo delle differenze triple richiede un tempo sensibilmente maggiore rispettoalle differenze singole e doppie e presuppone l’utilizzo di ricevitori GPS portatili dielevata qualità, in grado cioè di effettuare misure di fase.
dP dCrsr
rsr,
dP dCrsa
rsa,
ddP dP dP ddR ddE ddE ddE ddE
ddC dC dC ddR ddE ddE ddE ddE ddNrs
rsa
rsr
I T MP NP
rs
rsa
rsr
I T MC NC
= − = + + + +
= − = − + + + + ⋅λ
Per ricevitori a doppia frequenza si possono effettuare contemporaneamente misure di fase su entrambe le portanti L1 ed L2, e stimare il ritardo ionosferico tenendo conto del fatto che esso è inversamente proporzionale alla frequenza.Per ricevitori a singola frequenza il ritardo si stima ricorrendo ai parametri medi inviati dai satelliti nel subframe 4 del Navigation Message.
errori ionosferici
Si possono correggere applicando modelli empirici che si basano sulla stima delle caratteristiche troposferiche ottenuta mediante misure di pressione, temperatura e umidità effettuate a terra (utili in caso di post-processing).
errori troposferici
Tabella B Sistemi impiegati per eliminare gli errori residui dovuti ai ritardi iono- etroposferici.
dddC t ddC t ddC t dddR dddE dddEr
srs
rs
MC NC( ) = ( ) − ( ) = + +2 1
(3)
(4)

NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 101
Coratella • Il Sistema GPS
possibile elaborare i dati raccolti contemporanea-mente da ciascuno di essi e correggere le misureeffettuate, in modo da eliminare o da ridurre dra-sticamente tutti gli errori di modo comune. La posi-zione di uno dei ricevitori (riferimento) è assuntacome nota ed esatta , in quanto determinatamediante strumenti di altissima precisione sutempi molto lunghi, in modo da eliminare il piùpossibile tutte le fonti di errore. Mediante altriricevitori portatili (rover) si acquisiscono le misurerelativamente a quella del primo ricevitore, deter-minando quindi le distanze dalla stazione di rife-rimento (definite in ambito topografico come lebasi).
Il metodo differenziale è applicabile sia allemisure di pseudodistanza (precisione di qualchemetro) sia a quelle di fase (precisione centime-trica). La correzione è tanto più efficace quantominore risulti sia lo sfasamento temporale tra idati GPS grezzi ed i dati di correzione (comunquenon superiore a 30 s), sia la lunghezza della base(distanza tra il rover e il riferimento).
Per le misure di fase sussiste inoltre un limitedi applicabil i tà del metodo differenziale: ladistanza tra GPS di riferimento e GPS mobile nondeve superare i 30 km, in modo da contenere ladifferenza tra i ritardi con cui il segnale arriva aidue ricevitori sotto una lunghezza d’onda.
Altro parametro che condiziona l’accuratezzaraggiungibile con la correzione differenziale è iltempo di misura, che può variare da qualchesecondo (rilievi cinematici) a qualche ora (rilievistatici).
Le differenze sono effettuate più volte otte-nendo le cosiddette differenze multiple, che con-sentono di eliminare, o di ridurre drasticamente,alcune delle sorgenti di errore. Gli unici errori chenon sono eliminabili con la tecnica differenzialesono il rumore al ricevitore (dovuto all’attraversa-mento del segnale nella bassa atmosfera) e quellorelativo al percorso multiplo in ricezione. Questidue tipi di errore possono però essere stimati dalsistema prima di effettuare la misura, per essere
eliminati successivamente mediante una postela-borazione.
Nel riquadro a pagina 99 si riporta qualche det-taglio matematico sulla tecnica differenziale.
6.2 Equazioni alle differenze singole
Se due ricevitori ricevono contemporaneamente ilsegnale da uno stesso satellite, può essere impiegataun’equazione alle differenze singole, che rappresenta ladifferenza di cammino ottico percorso dal segnale perraggiungere ciascuno di essi. La posizione di uno deiricevitori è assunta come nota e con questa si deter-mina la posizione dell’altro rispetto al primo (figura11). Se le osservazioni avvengono nello stesso istanteè possibile eliminare o ridurre l’errore sull’orologiodel satellite.
In modo analogo, considerando un solo ricevitoree le misure dei segnali che provengono da due satel-liti, si può ridurre l’entità dell’errore dell’orologio delricevitore (figura 12).
6.3 Equazioni alle differenze doppie
Se due ricevitori tracciano contemporaneamente glistessi due satelliti, è possibile utilizzare le equazioni alledifferenze doppie che sono ottenibili sottraendo tra loro ledifferenze singole ottenute dai due ricevitori con cia-scun satellite (figura 13). Le differenze doppie consen-tono di eliminare o di attenuare gli errori atmosferici,nell’ipotesi che le condizioni ionosferiche e troposferi-che siano pressoché costanti nella zona in cui sono ese-guite le misure (le distanze tra i ricevitori non devonoessere superiori a qualche decina di km).
Le differenze doppie sono definite come osservabilifondamentali, poiché sono quelle utilizzate dalla mag-gior parte dei software per l’elaborazione dei dati GPS.
6.4 Equazioni alle differenze triple
Per eliminare l’ambiguità iniziale insita nellemisure di fase (descritta nel paragrafo 4) è suffi-ciente determinare le differenze doppie in due
Satellite i
Ricevitore ARicevitore B
Figura 11 Differenze singole con due ricevitori e unsatellite.
Satellite i
Ricevitore A
Satellite j
Figura 12 Differenze singole con un ricevitore e duesatelliti.

102 NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002
Coratella • Il Sistema GPS
successivi istanti di tempo t1 e t2 (usualmentedefiniti epoche) e sottrarle tra loro, ottenendo cosìle cosiddette equazioni alle differenze triple (figura14). Queste equazioni possono essere utilizzatequando, nel corso di una sessione di misura,ricompare l’ambiguità iniziale a causa del momen-taneo sganciamento del segnale ricevuto da unsatellite (fenomeno noto come cycle slip).
Il calcolo delle differenze triple richiede untempo più elevato rispetto a quello necessario perdeterminare le differenze singole o doppie e pre-suppone che anche il r icevitore GPS (rover) ,dovendo effettuare misure di fase, sia di qualitàelevata.
7. Conclusioni
Nel corso dell’ultimo decennio si è assistito aduna sempre più spiccata integrazione tra i settoridelle telecomunicazioni e dell’informatica, che haconsentito di definire nuovi servizi a valore aggiunto.
La telefonia mobile consente oggi di renderedisponibili e fruibili ovunque le informazioni, con ilvantaggio di ottimizzare i processi gestionali e deci-
sionali. Una delle informazioni da sempre consideratacome fondamentale per le attività umane è quellarelativa alla determinazione di una posizione (di un
oggetto ovvero di sé stessi) e alla sua relazione con ilmondo circostante (georeferenziazione).
Il presente articolo ha descritto il sistema GPS,finora il più avanzato per la determinazione dellesuddette informazioni di posizione e di tempo.
Dopo l’analisi dei segmenti di cui esso si com-pone (costel lazione satel l i tare, control lo, diutente), è stato descritto il segnale inviato daisatelliti e le funzionalità principali di un ricevitoreGPS per acquisire il suddetto segnale e per deter-minarne la posizione, indicando il livello di preci-sione teorica della misura. Sono state, quindi, ana-lizzate le principali fonti di errore che interven-gono sulla precisione e le modalità di correzione(eliminazione o attenuazione) di tali effetti, conparticolare riguardo alla tecnica di correzione dif-ferenziale.
Figura 16 Un esempio di navigatore GPS integrato in uncomputer palmare.
Figura 15 Rilevamento GPS per la realizzazione di infra-strutture.
Font
e: C
ompa
q
Font
e: N
ikon
Ins
trum
ents
Satellite i
Satellite i
Ricevitore ARicevitore B
Satellite j
Satellite j
Epoca t1 Epoca t2
Figura 14 Differenze triple.
Satellite i
Ricevitore ARicevitore B
Satellite j
Figura 13 Differenze doppie.

NOTIZIARIO TECNICO TELECOM ITALIA - Anno 11 n. 1 - Giugno 2002 103
Coratella • Il Sistema GPS
In un successivo articolo, che sarà pubblicatoin un prossimo numero del Notiziario Tecnico, sidescriveranno i motivi che hanno indotto TIM adotarsi di una rete di stazioni GPS di riferimentoper la correzione differenziale. Sarà anche trattatala soluzione architetturale adottata per consentirel’erogazione di servizi commerciali, rivolti a unaclientela costituita da professionisti della misura,quali, ad esempio, geologi, topografi, ricercatori,aziende per la realizzazione di infrastrutture eopere civili (figura 15).
Non si esclude la possibilità che in un pros-simo futuro nuovi prodotti e applicazioni, comequello riprodotto in figura 16, possano avvicinareall’uso del GPS anche il mercato di massa.
BPSK Binary Phase Shift Keying2DRMS twice Distance Root Mean Square
(oppure 2 Dimensional Root MeanSquare)
C/A Coarse/AcquisitionCEP Circular Error ProbableDoD Department of DefenceEDOP East-axis Dilution Of PrecisionGDOP Geometric Dilution Of PrecisionGPS Global Positioning SystemHDOP Horizontal Dilution Of PrecisionNAVSTAR NAVigation Satellite Timing And
RangingNDOP North-axis Dilution Of PrecisionPPS Precise Positioning SystemPRC Primary Reference ClockPRN Pseudo Random NoiseRHCP Right Hand Circularly PolarizedRINEX Receiver INdependent EXchange
formatRMS Root Mean SquareRTCM Radio Technical Commission for
Maritime serviceSC-104 Radio Technical Communication for
Maritime services Special Commitee-104
S/A Selective AvailabilitySEP Spherical Error ProbableSPS Standard Positioning SystemSV Space Vehicle (satellite)TOA Time Of ArrivalTOW Time Of WeekTSLF Time Since Last FixTTFF Time To First FixUERE User Equivalent Range ErrorUTC Universal Time CoordinatedVDOP Vertical Dilution Of Precision
[1] Dana, P.H.: Global Positioning System Overview.www.colorado.edu/geography/gcraft/notes/gps/gps_f.html, settembre 1994.
[2] Parkinson, B.W.; Spilker, J.J.: GPS: Theory andApplications - cap. 11: GPS Error Analysis.American Institute of Aeronautics andAstronautics, gennaio 1996.
[3] Diggelen, F.v.: GPS Accuracy. Lies, Damn Liesand Statistics.www.gpsworld.com/columns/9805innov.html,1998.
[4] [email protected]: Some Theory on GPS RangeMeasurements. http://home-2.worldonline.nl/~samsvl/theory.htm, marzo 2000.
[5] Arinc Research Corporation El Segundo, CA(USA): ICD-GPS-200C - NAVSTAR GPS SpaceSegment / Navigation User Interfaces. Ottobre1993.
[6] Diggelen, F.v.; Abraham, C.: IndoorGPSTMTechnology White Paper. Presentato al CTIAWireless-Agenda, Dallas, maggio 2001.
[7] Timing characteristics of Primary Reference Clocks.ITU-T Recommandation G.811, settembre1997.
Duilio Coratella ha conseguito la laureacon lode in Ingegneria Elettronica indirizzoTelecomunicazioni presso il Politecnico diBari nell’anno 1993, discutendo una tesi sudispositivi ottici non lineari su guida d’ondaper reti di telecomunicazioni. Nel 1995 èstato assunto nell’Area Rete della DirezioneGenerale di TIM. Dal 1995 al 1997 si èoccupato di analisi e valorizzazione deiparametri di cella e della definizione edanalisi dei dati statistici di traffico e di qualità
della rete GSM. Dal 1997 al 1999 ha coordinato un gruppo dilavoro per l’ottimizzazione della rete TACS in termini diefficienza, riduzione della congestione e distribuzione dellerisorse radio sul territorio, ed è stato membro del SATIGnell’ambito del GSM MoU. Dal 1999 al 2000 si è occupato ditecniche e di sistemi per il positioning su rete radiomobile ed haseguito lo sviluppo della rete GPS di TIM, collaborando conTILAB al progetto di una piattaforma per l’erogazione dei datiGPS e, con le funzioni di marketing di TIM, per la definizionedei relativi servizi commerciali . Opera ora nel ClientManagement di Rete, dove, nell’ambito del processo diinnovazione prodotti e servizi, cura i rapporti tra le linee disviluppo e di esercizio e le aree commerciali e di marketing,coordinando gli studi di fattibilità e collaborando alla definizionedelle specifiche funzionali. È membro del Comitato TecnicoTIM-ASI (Agenzia Spaziale Italiana) nel cui ambito segue leattività di integrazione della Rete GPS di TIM nel SistemaEUREF (EUropean REference Frame).









![Notiziario UMI ISSN 2499-0434 Anno XLIV [online] NOTIZIARIO...2017/05/05 · Notiziario UMI ISSN 2499-0434 Anno XLIV [online] NOTIZIARIO DELL’UNIONE MATEMATICA ITALIANA MAGGIO 2017](https://static.fdocumenti.com/doc/165x107/5fe53493d366ac2611271365/notiziario-umi-issn-2499-0434-anno-xliv-online-notiziario-20170505-notiziario.jpg)