Metodo Degli Spostamenti - Telaio Iperstatico
12
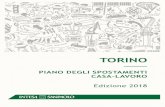
Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________ _____ ___________________________________________________________________ ______ Pag.1 SOLUZIONE DI UN TELAIO IPERSTATICO - Metodo degli spostamenti - 1. Generalità Trave principale: AE – EF – FD HE400A 4 10 507 . 4 - ⋅ = b J [ ] 4 m Colonne: EB – FC HE300A 4 10 826 . 1 - ⋅ = c J [ ] 4 m Si considerano gli elementi infinitamente rigidi a forza assiale e tagliante. 2. Sistema “zero” – a nodi bloccati La soluzione del sistema a nodi bloccati con i carichi di progetto avviene per mezzo di abachi di travi semplici di cui siano note le caratteristiche di sollecitazione: q [kN/m] q [kN/m] q [kN/m] 3 8 ql AE 5 8 ql AE 5 8 ql FD 3 8 ql FD 1 2 ql EF 1 2 ql EF 1 8 ql AE 2 2 1 12 ql EF 1 12 ql EF 2 2 E F 1 8 ql FD Trave AE e FD = trave incastro cerniera con carico distribuito Trave EF = trave incastro incastro con carico distribuito A E F D B C
-
Upload
vincenzo-sorrentino -
Category
Documents
-
view
634 -
download
2
Transcript of Metodo Degli Spostamenti - Telaio Iperstatico

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.1
SOLUZIONE DI UN TELAIO IPERSTATICO - Metodo degli spostamenti -
1. Generalità
Trave principale: AE – EF – FD HE400A 410507.4 −⋅=bJ [ ]4m
Colonne: EB – FC HE300A 410826.1 −⋅=cJ [ ]4m
Si considerano gli elementi infinitamente rigidi a forza assiale e tagliante.
2. Sistema “zero” – a nodi bloccati
La soluzione del sistema a nodi bloccati con i carichi di progetto avviene per mezzo di abachi di travi semplici di cui siano note le caratteristiche di sollecitazione:
q [kN/m]q [kN/m] q [kN/m]
38 qlAE
58 qlAE 5
8 qlFD
38 qlFD
12 qlEF 1
2 qlEF
18 qlAE
2 2112 qlEF 1
12 qlEF2 2
E F
18 qlFD
Trave AE e FD = trave incastro cerniera con carico distribuito Trave EF = trave incastro incastro con carico distribuito
A E F D
B C

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.2
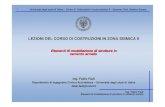
3. Sistema “uno” – a nodi sbloccati (Rotazione del nodo E)
Si impone una rotazione 1ϕ al nodo E, e sull’abaco delle “distorsioni nodali” si determinano le forze e i momenti che tale rotazione genera sugli elementi concorrenti nel nodo:
FE
ϕ1
ϕ1
ϕ1
FE
3 Jbϕ1
lAE2
2lAE
3 Jbϕ1
2lEF
6 Jbϕ1
2h
6 Jcϕ1
2h
6 Jcϕ1
2lEF
6 Jbϕ1
lAE
3 Jbϕ1
lEF
4 Jbϕ1
lEF
2 Jcϕ1
h
4 Jcϕ1
h
2 Jbϕ1

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.3
4. Sistema “due” – a nodi sbloccati (Rotazione del nodo F)
Si impone una rotazione 2ϕ al nodo F, e sull’abaco delle “distorsioni nodali” si determinano le forze e i momenti che tale rotazione genera sugli elementi concorrenti nel nodo:
E F
ϕ2
ϕ2
ϕ2
E F
3 Jbϕ2
lFD2
2lFD
3 Jbϕ2
2lEF
6 Jbϕ2
2h
6 Jcϕ2
2h
6 Jcϕ2
2lEF
6 Jbϕ2
lFD
3 Jbϕ2
lEF
4 Jbϕ2
lEF
2 Jcϕ2
h
4 Jcϕ2
h
2 Jbϕ2

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.4
5. Determinazione delle rotazioni 1ϕ e 2ϕ
18 qlAE
2 2112 qlEF 1
12 qlEF2 21
8 qlFD
E F
E F
lFD
3 Jbϕ2
lEF
4 Jbϕ2
lEF
4 Jcϕ2
h
h4 Jcϕ1
lEF
4 Jbϕ1
lEF
3 Jbϕ1
lAE
E F
SISTEMA "0"
SISTEMA "1"
SISTEMA "2"
V
M
H
2 Jbϕ1
2 Jbϕ2
��
��
�
=
⋅+= �=
FEi
n
kkikii
,1
0 ϕµµµ
���
⋅+⋅+=⋅+⋅+=
22110
22110
ϕϕϕϕ
FFFF
EEEE
MMMM
MMMM
Dove:
iµ Generica forza esterna applicata direttamente al generico nodo i secondo la direzione dello spostamento iξ nel sistema effettivamente assegnato.
(Se =�= iii w µξ forza orizzontale; se =�= iii µϕξ momento)
0iµ Generica sollecitazione indotta nel generico nodo i , nel sistema a nodi bloccati, dai carichi agenti lungo le travi, lungo la direzione dello spostamento iξ .
ikµ Generica sollecitazione indotta nel generico nodo i , nel sistema a nodi sbloccati, nella direzione dello spostamento iξ , dovuta allo spostamento generico 1=kξ del nodo k .
(Se ikikiikk Tvv =�=�== µξξ 1 ). n Numero complessivo delle componenti di spostamento.

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.5
I segni dei vari termini del sistema sono determinabili confrontando i momenti sui nodi con la convenzione positiva delle sollecitazioni
��
�
��
�
�
⋅���
�
�+++⋅−−+=
⋅+⋅���
�
�++−+−=
2122
2122
4432121
81
0
2443121
81
0
ϕϕ
ϕϕ
EF
bc
FD
b
EF
bEFAE
EF
b
EF
bc
AE
bEFAE
lJ
hJ
lJ
lJ
qlql
lJ
lJ
hJ
lJ
qlql
00.5=AEl [ ]m 00.12=EFl [ ]m 00.5=FDl [ ]m 00.6=h [ ]m 410507.4 −⋅=bJ [ ]4m
410826.1 −⋅=cJ [ ]4m 20=q [ ]2mkN
( )( )�
��
⋅+++⋅−−+=⋅+⋅++−+−=
21
21
00015023.000012173.000027042.0000075116.02405.620
000075116.000015023.000012173.000027042.02405.620
ϕϕϕϕ
908.37987021 == ϕϕ
6. Determinazione delle caratteristiche di sollecitazione M e V
I momenti sono espressi in [ ]mkN ⋅ NODO E
22.16572.1025.623
8 1
2
−=−−=⋅−−= ϕEA
bEAEA l
JqlM rotazione negativa
47.21124
12 21
2
=⋅+⋅−= ϕϕEF
b
EF
bEFEF l
JlJql
M rotazione positiva
24.464
1 −=⋅−= ϕhJ
M cEB rotazione negativa
NODO F
22.16572.1025.623
8 2
2
=+=⋅+= ϕFD
bFDFD l
JqlM rotazione positiva
47.21142
12 21
2
−=⋅+⋅−−= ϕϕFE
b
FE
bFEFE l
JlJql
M rotazione negativa
24.464
2 =⋅= ϕhJ
M cFB rotazione positiva

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.6
NODO B
12.232
1 −=⋅−= ϕhJ
M cBE rotazione negativa
NODO C
12.232
2 =⋅+= ϕhJ
M cCF rotazione positiva
I tagli sono espressi in [ ]kN
NODO E
04.833
85
12 =⋅+= ϕEA
bEAEA l
JqlV verso positivo
12066
21
2212 =⋅+⋅−= ϕϕEF
b
EF
bEFEF l
JlJ
qlV verso positivo
56.116
12 −=⋅−= ϕhJ
V cEB verso negativo
NODO F
04.833
85
22 =⋅+= ϕFD
bFDFD l
JqlV verso positivo
12066
21
2212 =⋅−⋅+= ϕϕFE
b
FE
bFEFE l
JlJ
qlV verso positivo
56.116
22 =⋅= ϕhJ
V cFC verso positivo
NODO B
56.116
12 =⋅= ϕhJ
V cBE verso positivo
NODO C
56.116
22 −=⋅−= ϕhJ
V cCF verso negativo
NODO A
95.163
83
12 =⋅−= ϕAE
bAEAE l
JqlV verso positivo
NODO D
95.163
83
22 =⋅−= ϕDF
bDFDF l
JqlV verso positivo

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.7
Da ciò risulta in accordo con la convenzione positiva:
q [kN/m]q [kN/m] q [kN/m]
16.95
83.04 83.04
16.95
120 120
165.22
E F
11.56
11.56 11.56
11.56
211.47
46.24
165.22211.47
46.24
23.12 23.12
54.1482
620612047.211
2
22
max, =⋅−⋅+−=⋅−⋅+−=+ zqzVMM EFEFEF

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.8
Verifica delle sollecitazioni nei nodi
��
��
�
=+−=−−=+−
0
0
0
321
321
321
MMM
NVV
VNN
��
��
�
=−−=−−=+−
0
0
0
321
321
321
MMM
NVV
VNN
NODO E
La prima equazione non può essere ancora risolta perché possiede due incognite: Dalla seconda si ottengono le forze normali sui pilastri:
��
=−−−=−−
012004.83
0
EB
EBEFEA
N
NVV 04.203−=EBN [ ]kN
( ) ( ) 024.4647.21122.165
0
=−+−−−=+− EBEFEA MMM
NODO F
La prima equazione non può essere ancora risolta perché possiede due incognite: Dalla seconda si ottengono le forze normali sui pilastri:
��
=−−−=−−
004.83120
0
FC
FCFDFE
N
NVV 04.203−=FCN [ ]kN
( ) ( ) 024.4622.16547.211
0
=−−−−−=−− FCFDFE MMM
M1
N1 N2
V1
V2
M2
N3
V3 M3 M3V3
N3
M2
V2
V1
N2N1
M1

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.9
7. Determinazione delle caratteristiche di sollecitazione N Il precedente metodo porta alla determinazione delle sollecitazioni sui pilastri:
04.203−=EBN [ ]kN 04.203−=FCN [ ]kN
La forza di taglio sui pilastri è uguale e contraria alla forza normale sul traverso:
E F
11.56 11.56
11.56
E Gk1=EA/5 k2=EA/6
A
Si ha, in termini di rigidezza assiale:
AEAEAE
lAE
lAE
kkkEGAE
EFGAEtot ⋅⋅=⋅+⋅=⋅+⋅=+=3011
65
totEAEAE kPkN :: = 31.6
3011
556.11
=⋅⋅
⋅⋅=⋅=
AE
AE
kkP
Ntot
AEEAE [ ]kN
totEEGEG kPkN :: = 25.5
3011
656.11
=⋅⋅
⋅⋅=⋅=
AE
AE
kkP
Ntot
EGEEG [ ]kN
Da cui: 31.6+=AEN [ ]kN
25.5−=EGN [ ]kN

Dott. Ing. Simone Caffè ____________________________________________________________________________________________________________
_____ ___________________________________________________________________ ______ Pag.10
Porzione di traverso
Telaio integrale
__________________________________________________________________ Fine Esempio

SOLUZIONI DI TRAVI ELEMENTARI VARIAMENTE CARICATE
Travi con doppio incastro
A B
l
Travi con incastro e cerniera
A B
l
CARICHI ESTERNI CARICHI ESTERNI
A BP
MA MB
VA VB
a b
2a)(ll
PbV
3
2
A += ; 2b)(ll
PaV
3
2
B +=
2
2
Al
PabM −= ;
2
2
Bl
bPaM =
A B
l/2
P
MA
VA VB
l/2
P16
11VA = ; P
16
5VB =
Pl16
3MA =
A B
l/2
P
MA MB
VA VB
l/2
2
PVV BA ==
8
PlMM BA ==
A B
q
MA
VA VB
ql8
5VA = ; ql
8
3VB =
8
qlM
2
A =
A B
q
MA MB
VA VB
2
qlVV BA ==
12
qlMM
2
BA ==
A B
q
MA
VA VB
ql5
2VA = ;
10
qlVB =
15
qlM
2
A =
A B
a
q
MA MB
VA VB
b
+=
3
3
2
2
Al
a
l
2a-2
2
qaV
;
=l
a-2
2l
qaV
2
3
B
+−=
2
22
A4l
a
3l
2a-2
1qaM
;
−−=
2
22
B4l
a
3l
aqaM
A B
l/2l/2
MA
VA VB
M
l
M
8
9VV BA =−=
8
MMA =
A B
q
MA MB
VA VB
ql20
3VA = ; ql
20
7VB =
2
A ql30
1M = ; 2
B ql20
1M =
A BMA
VA VB
M
l
M
2
3VV BA =−=
2
MMA =
A B
ba
MA MB
VA VB
M3BAl
6MabVV −=−=
−=l
b32
l
bMMA
;
−−=l
a32
l
aMMB
A BMA
VA VB
t
tlh
tEJ
2
3VV BA
∆α=−=
h
tEJ
2
3MA
∆α=
DISTORSIONI VINCOLARIA B
l/2l/2
MA MB
VA VB
M
l
M
2
3VV BA =−=
4
MMM BA ==
A BMA
VA VB
2BAl
EJ3VV
ϕ=−=
l
EJ3MA
ϕ=
A BMA MBt
t h
tEJMM BA
∆α=−=
A BMA
VA VB
3BAl
EJ3VV
∆=−=
2Al
EJ3M
∆=
DISTORSIONI VINCOLARI
A BMA MB
VA VB
2BAl
EJ6VV
ϕ=−=
l
EJ4MA
ϕ= ;l
EJ2MB
ϕ=
A BMA MB
VA VB
3BAl
EJ12VV
∆=−=
2BAl
EJ6MM
∆==
A BMA
VA VB
3BAl
EJ3VV
∆=−=
2Al
EJ3M
∆=

Travi con incastro e doppio
pendolo
A B
l
CARICHI ESTERNI DISTORSIONI VINCOLARI
A B
l/2
P
MA MB
VA
l/2
PVA =
Pl8
3MA = ;
8
PlMB =
A BMA MB
l
EJMM BA
ϕ=−=
A BP
MA MB
VA
PVA =
2
PlMM BA ==
A B
A B
q
MA MB
VA
qlVA =
3
qlM
2
A = ;6
qlM
2
B =
A B
q
MA
VA
MB 2
qlVA =
8
qlM
2
A = ;24
qlM
2
B =
A B
l/2l/2
MA MB
M
2
MMM BA ==
A BMA MB
t
t h
tEJMM BA
∆α=−=




![METODO DEGLI SPOSTAMENTI - unipa.it · METODO DEGLI SPOSTAMENTI --lermo triangolare Simmetricità della matrice di rigidezza [k] La matrice [k] risulta simmetrica (k ... I coefficienti](https://static.fdocumenti.com/doc/165x107/5c65a48909d3f2966e8d299d/metodo-degli-spostamenti-unipa-metodo-degli-spostamenti-lermo-triangolare.jpg)