Meccanica - 5. Moti Relativi - Università di...
31
Meccanica 5. Moti Relativi http://campus.cib.unibo.it/2423/ Domenico Galli Dipartimento di Fisica e Astronomia 22 febbraio 2017
-
Upload
nguyenngoc -
Category
Documents
-
view
221 -
download
1
Transcript of Meccanica - 5. Moti Relativi - Università di...

Meccanica
5. Moti Relativi
http://campus.cib.unibo.it/2423/
Domenico GalliDipartimento di Fisica e Astronomia
22 febbraio 2017
Traccia
1. Cambiamento del Sistema di Riferimento
2. Trasformazione del Vettore Posizionale
3. Trasformazione della Derivata Temporale di un Vettore
4. Trasformazione della Velocità
5. Trasformazione dell’Accelerazione
D. Galli
2
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Cambiamento di Sistema di Riferimento
Esistono infinite terne ortogonali di riferimento, diverse tra loro per:
Posizione dell’origine O;Direzione orientata degli assi x, y e z;Stato di moto:
Traslazione dell’origine;Rotazione degli assi.
L’utilizzo dell’una piuttosto che dell’altra è essenzialmente arbitrario:
E fisicamente equivalente.
Di solito si sceglie una particolare terna ortogonale di riferimento sulla basedi considerazioni di opportunità.
La rappresentazione di una grandezza fisica dipende in generale dallaterna di riferimento scelta. Problema:
Trovare la relazione tra le espressioni di una grandezza fisica data
nelle diverse terne di riferimento, detta legge di trasformazione.
D. Galli
3
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Cambiamento di Sistema di Riferimento (II)
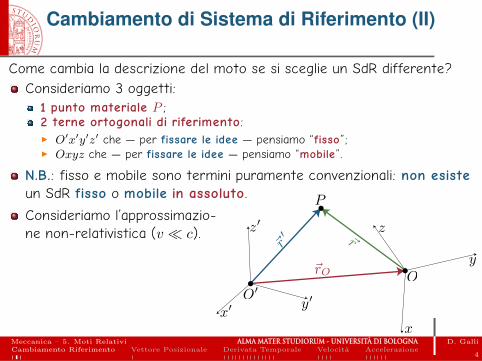
Come cambia la descrizione del moto se si sceglie un SdR differente?Consideriamo 3 oggetti:
1 punto materiale P ;2 terne ortogonali di riferimento:I O′x′y′z′ che — per fissare le idee — pensiamo “fisso”;I Oxyz che — per fissare le idee — pensiamo “mobile”.
N.B.: fisso e mobile sono termini puramente convenzionali: non esiste
un SdR fisso o mobile in assoluto.
Consideriamo l’approssimazio-ne non-relativistica (v � c).
D. Galli
4
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Cambiamento di Sistema di Riferimento (III)
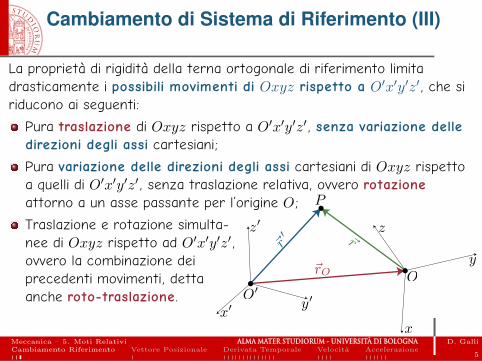
La proprietà di rigidità della terna ortogonale di riferimento limitadrasticamente i possibili movimenti di Oxyz rispetto a O′x′y′z′, che siriducono ai seguenti:
Pura traslazione di Oxyz rispetto a O′x′y′z′, senza variazione delle
direzioni degli assi cartesiani;
Pura variazione delle direzioni degli assi cartesiani di Oxyz rispettoa quelli di O′x′y′z′, senza traslazione relativa, ovvero rotazione
attorno a un asse passante per l’origine O;
Traslazione e rotazione simulta-nee di Oxyz rispetto ad O′x′y′z′,ovvero la combinazione deiprecedenti movimenti, dettaanche roto-traslazione.
D. Galli
5
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione del Vettore Posizionale
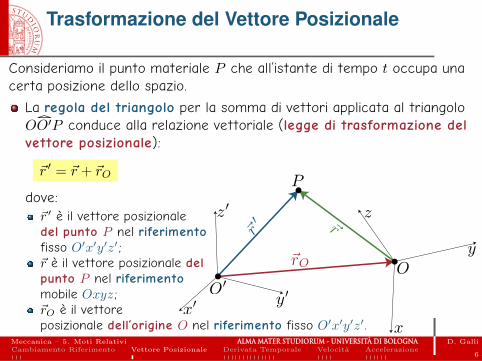
Consideriamo il punto materiale P che all’istante di tempo t occupa unacerta posizione dello spazio.
La regola del triangolo per la somma di vettori applicata al triangoloOËO′P conduce alla relazione vettoriale (legge di trasformazione del
vettore posizionale):
~r ′ = ~r + ~rO
dove:~r ′ è il vettore posizionaledel punto P nel riferimento
fisso O′x′y′z′;~r è il vettore posizionale del
punto P nel riferimento
mobile Oxyz;~rO è il vettoreposizionale dell’origine O nel riferimento fisso O′x′y′z′.
D. Galli
6
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Vettori Costanti in un Riferimento
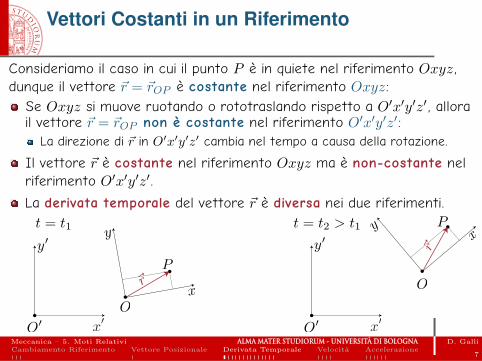
Consideriamo il caso in cui il punto P è in quiete nel riferimento Oxyz,dunque il vettore ~r = ~rOP è costante nel riferimento Oxyz:
Se Oxyz si muove ruotando o rototraslando rispetto a O′x′y′z′, allorail vettore ~r = ~rOP non è costante nel riferimento O′x′y′z′:
La direzione di ~r in O′x′y′z′ cambia nel tempo a causa della rotazione.
Il vettore ~r è costante nel riferimento Oxyz ma è non-costante nelriferimento O′x′y′z′.
La derivata temporale del vettore ~r è diversa nei due riferimenti.
D. Galli
7
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore
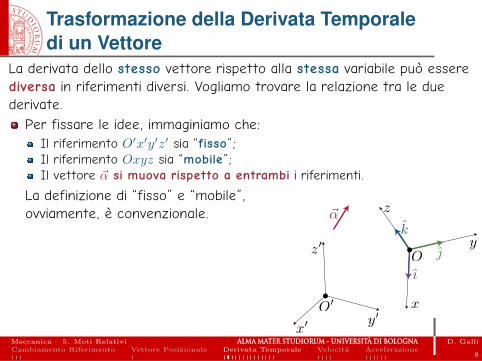
La derivata dello stesso vettore rispetto alla stessa variabile può esserediversa in riferimenti diversi. Vogliamo trovare la relazione tra le duederivate.
Per fissare le idee, immaginiamo che:Il riferimento O′x′y′z′ sia “fisso”;Il riferimento Oxyz sia “mobile”;Il vettore ~α si muova rispetto a entrambi i riferimenti.
La definizione di “fisso” e “mobile”,ovviamente, è convenzionale.
D. Galli
8
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione

Trasformazione della Derivata Temporaledi un Vettore (II)
Nella base cartesiana {ı̂, ̂, k̂} l’osservatore in quiete rispetto al
riferimento “mobile” Oxyz rappresenta un generico vettore ~α come:
~α|O = αx(t) ı̂+ αy(t) ̂+ αz(t) k̂
ı̂, ̂ e k̂ sono costanti in quanto sono solidali al riferimento Oxyz,dunque sono fissi per un osservatore in quiete rispetto a Oxyz.
Nella stessa base cartesiana {ı̂, ̂, k̂} l’osservatore in quiete rispetto
al riferimento “fisso” O′x′y′z′ rappresenta ungenerico vettore ~α come:
~α|O′ = αx(t) ı̂(t) + αy(t) ̂(t) + αz(t) k̂(t)
ı̂, ̂ e k̂, in questo caso dipendono dal tempo
in quanto sono solidali a Oxyz che si muove
rispetto al riferimento O′x′y′z′
dell’osservatore.D. Galli
9
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore (III)
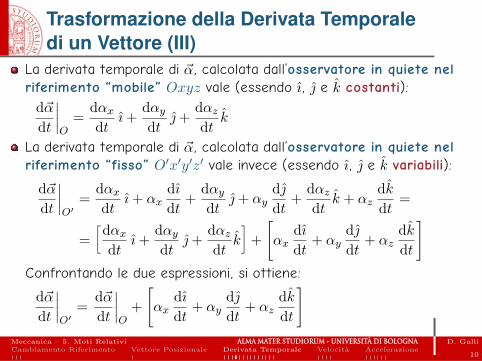
La derivata temporale di ~α, calcolata dall’osservatore in quiete nel
riferimento “mobile” Oxyz vale (essendo ı̂, ̂ e k̂ costanti):d~α
dt
∣∣∣∣O=
dαx
dtı̂+
dαy
dt̂+
dαz
dtk̂
La derivata temporale di ~α, calcolata dall’osservatore in quiete nel
riferimento “fisso” O′x′y′z′ vale invece (essendo ı̂, ̂ e k̂ variabili):
d~α
dt
∣∣∣∣O′
=dαx
dtı̂+ αx
dı̂
dt+
dαy
dt̂+ αy
d̂
dt+
dαz
dtk̂ + αz
dk̂
dt=
=
ïdαx
dtı̂+
dαy
dt̂+
dαz
dtk̂
ò+
[αx
dı̂
dt+ αy
d̂
dt+ αz
dk̂
dt
]Confrontando le due espressioni, si ottiene:
d~α
dt
∣∣∣∣O′
=d~α
dt
∣∣∣∣O+
[αx
dı̂
dt+ αy
d̂
dt+ αz
dk̂
dt
]D. Galli
10
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione

Trasformazione della Derivata Temporaledi un Vettore (IV)
Per completare l’espressione dobbiamo calcolare:[αx
dı̂
dt+ αy
d̂
dt+ αz
dk̂
dt
]contenente le derivate temporali dei versori cartesiani “mobili” ı̂, ̂ ek̂ nel riferimento “fisso” O′x′y′z′.Per l’osservatore nel riferimento “fisso” O′x′y′z′ — la base di versoricartesiani {ı̂, ̂, k̂} è animata dallo stesso moto roto-traslatorio delriferimento “mobile” Oxyz.Le traslazioni di Oxyz non interessano labase di versori {ı̂, ̂, k̂}:
Determinano spostamenti dei versori che nepreservano la direzione, lasciando i versoriimmutati
I Essendo il modulo dei versori identicamenteunitario per definizione.
D. Galli
11
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore (V)
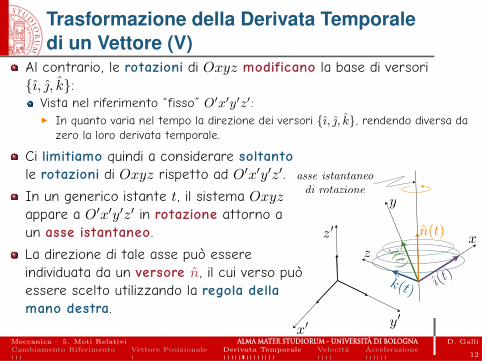
Al contrario, le rotazioni di Oxyz modificano la base di versori{ı̂, ̂, k̂}:
Vista nel riferimento “fisso” O′x′y′z′:I In quanto varia nel tempo la direzione dei versori {ı̂, ̂, k̂}, rendendo diversa da
zero la loro derivata temporale.
Ci limitiamo quindi a considerare soltanto
le rotazioni di Oxyz rispetto ad O′x′y′z′.
In un generico istante t, il sistema Oxyzappare a O′x′y′z′ in rotazione attorno aun asse istantaneo.
La direzione di tale asse può essereindividuata da un versore n̂, il cui verso puòessere scelto utilizzando la regola della
mano destra.
D. Galli
12
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore (VI)
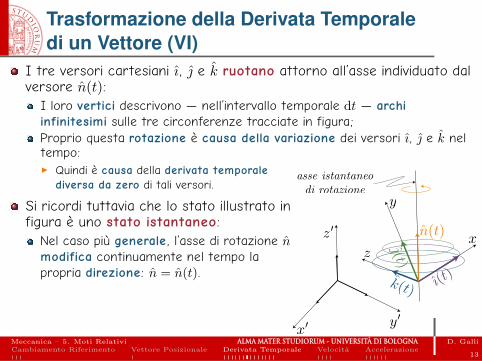
I tre versori cartesiani ı̂, ̂ e k̂ ruotano attorno all’asse individuato dalversore n̂(t):
I loro vertici descrivono — nell’intervallo temporale dt — archi
infinitesimi sulle tre circonferenze tracciate in figura;Proprio questa rotazione è causa della variazione dei versori ı̂, ̂ e k̂ neltempo:I Quindi è causa della derivata temporale
diversa da zero di tali versori.
Si ricordi tuttavia che lo stato illustrato infigura è uno stato istantaneo:
Nel caso più generale, l’asse di rotazione n̂modifica continuamente nel tempo lapropria direzione: n̂ = n̂(t).
D. Galli
13
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione

Trasformazione della Derivata Temporaledi un Vettore (VII)
Determiniamo ora la derivata dı̂dt .
Il vertice del versore ı̂ descrive — nell’intervallo dt — un arco
infinitesimo P̄P ′ della circonferenza in figura.Il segmento OP ha lunghezza unitaria:
Avendo il versore ı̂ = ~rOP modulo unitario.
Consideriamo il triangolo rettangolo
OÁCP :Il raggio R della circonferenza vale:
R = CP = sin θ
dove θ è l’angolo formato dai versori ı̂ e n̂.
Detto dϕ l’angolo al centro corrispondenteall’arco PP ′, la lunghezza dell’arco risulta:
P̄P ′ = sin θ dϕ
D. Galli
14
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore (VIII)
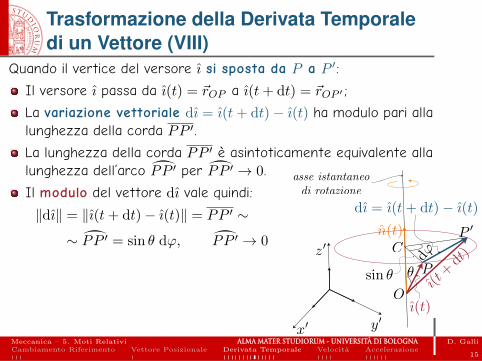
Quando il vertice del versore ı̂ si sposta da P a P ′:
Il versore ı̂ passa da ı̂(t) = ~rOP a ı̂(t+ dt) = ~rOP ′ ;
La variazione vettoriale dı̂ = ı̂(t+ dt)− ı̂(t) ha modulo pari allalunghezza della corda PP ′.
La lunghezza della corda PP ′ è asintoticamente equivalente allalunghezza dell’arco P̄P ′ per P̄P ′ → 0.
Il modulo del vettore dı̂ vale quindi:
‖dı̂‖ = ‖ı̂(t+ dt)− ı̂(t)‖ = PP ′ ∼
∼ P̄P ′ = sin θ dϕ, P̄P ′ → 0
D. Galli
15
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore (IX)
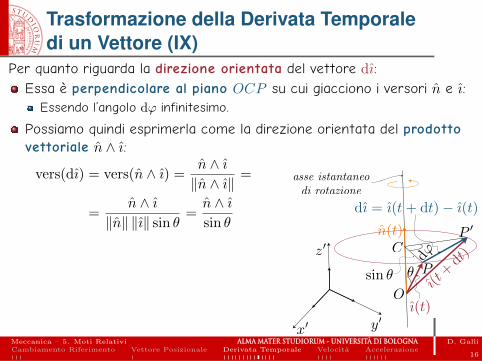
Per quanto riguarda la direzione orientata del vettore dı̂:Essa è perpendicolare al piano OCP su cui giacciono i versori n̂ e ı̂:
Essendo l’angolo dϕ infinitesimo.
Possiamo quindi esprimerla come la direzione orientata del prodottovettoriale n̂ ∧ ı̂:
vers(dı̂) = vers(n̂ ∧ ı̂) = n̂ ∧ ı̂‖n̂ ∧ ı̂‖
=
=n̂ ∧ ı̂
‖n̂‖ ‖ı̂‖ sin θ=n̂ ∧ ı̂sin θ
D. Galli
16
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore (X)
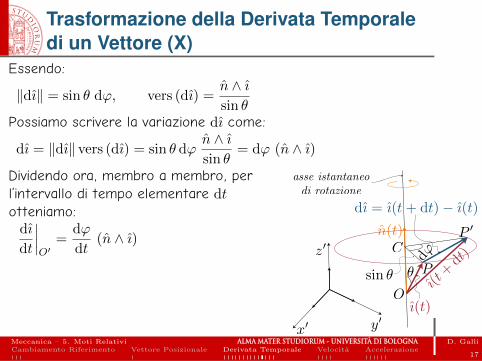
Essendo:
‖dı̂‖ = sin θ dϕ, vers (dı̂) =n̂ ∧ ı̂sin θ
Possiamo scrivere la variazione dı̂ come:
dı̂ = ‖dı̂‖ vers (dı̂) = sin θ dϕn̂ ∧ ı̂sin θ
= dϕ (n̂ ∧ ı̂)
Dividendo ora, membro a membro, perl’intervallo di tempo elementare dtotteniamo:dı̂
dt
∣∣∣∣O′
=dϕ
dt(n̂ ∧ ı̂)
D. Galli
17
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore (XI)
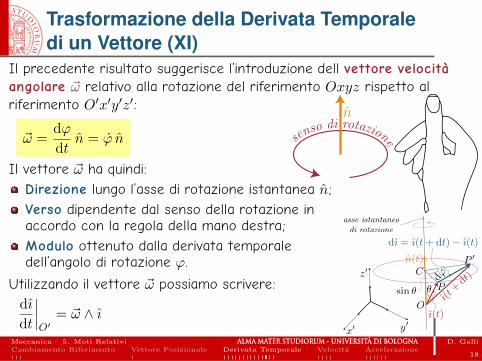
Il precedente risultato suggerisce l’introduzione dell vettore velocità
angolare ~ω relativo alla rotazione del riferimento Oxyz rispetto alriferimento O′x′y′z′:
~ω =dϕ
dtn̂ = ϕ̇ n̂
Il vettore ~ω ha quindi:Direzione lungo l’asse di rotazione istantanea n̂;Verso dipendente dal senso della rotazione inaccordo con la regola della mano destra;Modulo ottenuto dalla derivata temporaledell’angolo di rotazione ϕ.
Utilizzando il vettore ~ω possiamo scrivere:dı̂
dt
∣∣∣∣O′
= ~ω ∧ ı̂
senso di rotazione
D. Galli
18
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
Trasformazione della Derivata Temporaledi un Vettore (XII)
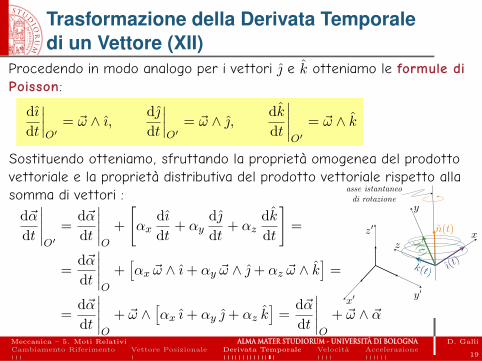
Procedendo in modo analogo per i vettori ̂ e k̂ otteniamo le formule di
Poisson:
dı̂
dt
∣∣∣∣O′
= ~ω ∧ ı̂, d̂
dt
∣∣∣∣O′
= ~ω ∧ ̂, dk̂
dt
∣∣∣∣∣O′
= ~ω ∧ k̂
Sostituendo otteniamo, sfruttando la proprietà omogenea del prodottovettoriale e la proprietà distributiva del prodotto vettoriale rispetto allasomma di vettori :d~α
dt
∣∣∣∣∣O′
=d~α
dt
∣∣∣∣∣O
+
[αx
dı̂
dt+ αy
d̂
dt+ αz
dk̂
dt
]=
=d~α
dt
∣∣∣∣∣O
+îαx ~ω ∧ ı̂+ αy ~ω ∧ ̂+ αz ~ω ∧ k̂
ó=
=d~α
dt
∣∣∣∣∣O
+ ~ω ∧îαx ı̂+ αy ̂+ αz k̂
ó=
d~α
dt
∣∣∣∣∣O
+ ~ω ∧ ~α
D. Galli
19
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
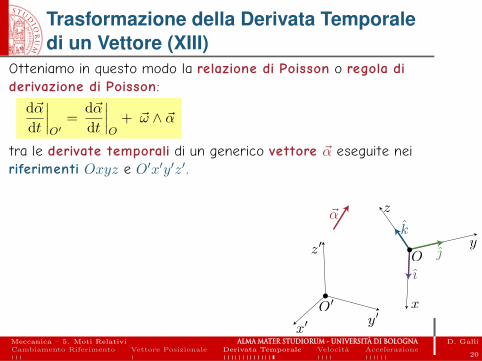
Trasformazione della Derivata Temporaledi un Vettore (XIII)
Otteniamo in questo modo la relazione di Poisson o regola di
derivazione di Poisson:
d~α
dt
∣∣∣∣O′
=d~α
dt
∣∣∣∣O+ ~ω ∧ ~α
tra le derivate temporali di un generico vettore ~α eseguite neiriferimenti Oxyz e O′x′y′z′.
D. Galli
20
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
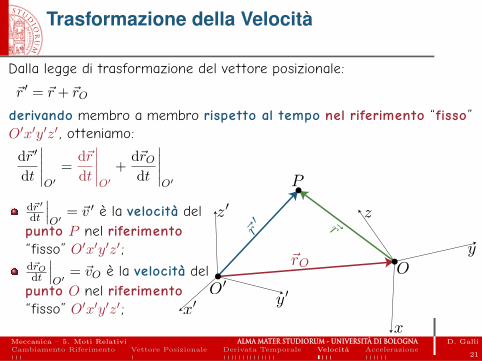
Trasformazione della Velocità
Dalla legge di trasformazione del vettore posizionale:
~r ′ = ~r + ~rO
derivando membro a membro rispetto al tempo nel riferimento “fisso”O′x′y′z′, otteniamo:
d~r ′
dt
∣∣∣∣∣O′
=d~r
dt
∣∣∣∣∣O′
+d~rOdt
∣∣∣∣∣O′
d~r ′
dt
∣∣∣O′
= ~v ′ è la velocità delpunto P nel riferimento
“fisso” O′x′y′z′;d~rOdt
∣∣∣O′
= ~vO è la velocità delpunto O nel riferimento
“fisso” O′x′y′z′;
D. Galli
21
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
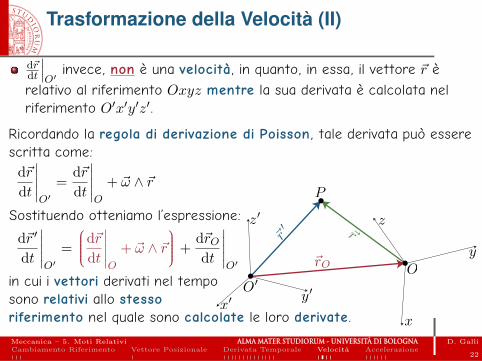
Trasformazione della Velocità (II)
d~rdt
∣∣∣O′
invece, non è una velocità, in quanto, in essa, il vettore ~r è
relativo al riferimento Oxyz mentre la sua derivata è calcolata nelriferimento O′x′y′z′.
Ricordando la regola di derivazione di Poisson, tale derivata può esserescritta come:d~r
dt
∣∣∣∣∣O′
=d~r
dt
∣∣∣∣∣O
+ ~ω ∧ ~r
Sostituendo otteniamo l’espressione:
d~r ′
dt
∣∣∣∣∣O′
=⎧⎪⎪⎪⎪⎪⎪⎩d~r
dt
∣∣∣∣∣O
+ ~ω ∧ ~r⎫⎪⎪⎪⎪⎪⎪⎭+
d~rOdt
∣∣∣∣∣O′
in cui i vettori derivati nel temposono relativi allo stesso
riferimento nel quale sono calcolate le loro derivate.
D. Galli
22
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
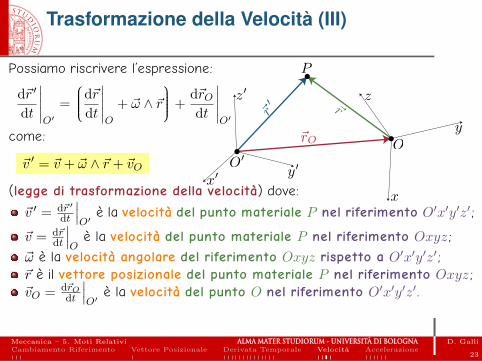
Trasformazione della Velocità (III)
Possiamo riscrivere l’espressione:
d~r ′
dt
∣∣∣∣∣O′
=⎧⎪⎪⎪⎪⎪⎪⎩d~r
dt
∣∣∣∣∣O
+ ~ω ∧ ~r⎫⎪⎪⎪⎪⎪⎪⎭+
d~rOdt
∣∣∣∣∣O′
come:
~v ′ = ~v + ~ω ∧ ~r + ~vO
(legge di trasformazione della velocità) dove:
~v ′ = d~r ′
dt
∣∣∣O′
è la velocità del punto materiale P nel riferimento O′x′y′z′;
~v = d~rdt
∣∣∣Oè la velocità del punto materiale P nel riferimento Oxyz;
~ω è la velocità angolare del riferimento Oxyz rispetto a O′x′y′z′;~r è il vettore posizionale del punto materiale P nel riferimento Oxyz;~vO = d~rO
dt
∣∣∣O′
è la velocità del punto O nel riferimento O′x′y′z′.
D. Galli
23
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione

Trasformazione della Velocità (IV)
Nell’espressione:
~v ′ = ~v + ~ω ∧ ~r + ~vO
La somma ~vT = ~vO + ~ω ∧ ~r è detta velocità di trascinamento:È la velocità che avrebbe il punto materiale P se esso fosse in quiete
nel riferimento Oxyz:Pertanto il suo moto rispetto a O′x′y′z′
fosse dovuto esclusivamente al suotrascinamento da parte delriferimento Oxyz.
Si può anche scrivere la legge
di trasformazione della
velocità nella forma:{~v ′ = ~v + ~vT
~vT = ~vO + ~ω ∧ ~rD. Galli
24
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
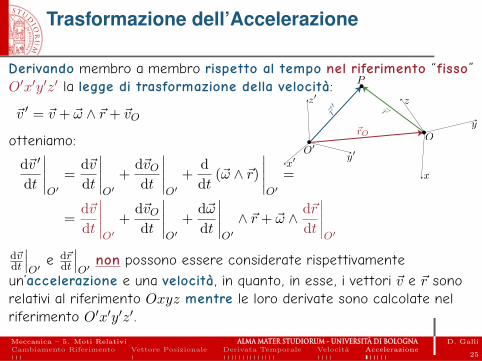
Trasformazione dell’Accelerazione
Derivando membro a membro rispetto al tempo nel riferimento “fisso”O′x′y′z′ la legge di trasformazione della velocità:
~v ′ = ~v + ~ω ∧ ~r + ~vO
otteniamo:
d~v ′
dt
∣∣∣∣∣O′
=d~v
dt
∣∣∣∣∣O′
+d~vOdt
∣∣∣∣∣O′
+d
dt(~ω ∧ ~r)
∣∣∣∣∣O′
=
=d~v
dt
∣∣∣∣∣O′
+d~vOdt
∣∣∣∣∣O′
+d~ω
dt
∣∣∣∣∣O′∧ ~r + ~ω ∧ d~r
dt
∣∣∣∣∣O′
d~vdt
∣∣∣O′
e d~rdt
∣∣∣O′
non possono essere considerate rispettivamente
un’accelerazione e una velocità, in quanto, in esse, i vettori ~v e ~r sonorelativi al riferimento Oxyz mentre le loro derivate sono calcolate nelriferimento O′x′y′z′.
D. Galli
25
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
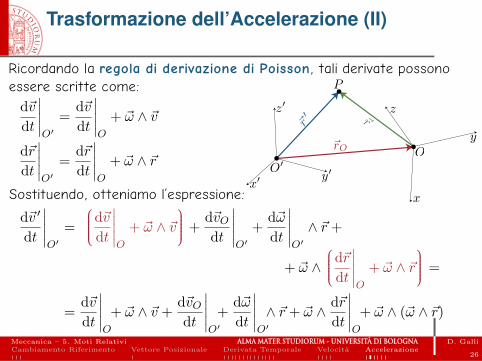
Trasformazione dell’Accelerazione (II)
Ricordando la regola di derivazione di Poisson, tali derivate possonoessere scritte come:d~v
dt
∣∣∣∣∣O′
=d~v
dt
∣∣∣∣∣O
+ ~ω ∧ ~v
d~r
dt
∣∣∣∣∣O′
=d~r
dt
∣∣∣∣∣O
+ ~ω ∧ ~r
Sostituendo, otteniamo l’espressione:
d~v ′
dt
∣∣∣∣∣O′
=⎧⎪⎪⎪⎪⎪⎪⎩d~v
dt
∣∣∣∣∣O
+ ~ω ∧ ~v⎫⎪⎪⎪⎪⎪⎪⎭+
d~vOdt
∣∣∣∣∣O′
+d~ω
dt
∣∣∣∣∣O′∧ ~r +
+ ~ω ∧⎧⎪⎪⎪⎪⎪⎪⎩d~r
dt
∣∣∣∣∣O
+ ~ω ∧ ~r⎫⎪⎪⎪⎪⎪⎪⎭=
=d~v
dt
∣∣∣∣∣O
+ ~ω ∧ ~v + d~vOdt
∣∣∣∣∣O′+
d~ω
dt
∣∣∣∣∣O′∧ ~r + ~ω ∧ d~r
dt
∣∣∣∣∣O
+ ~ω ∧ (~ω ∧ ~r)
D. Galli
26
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione

Trasformazione dell’Accelerazione (III)
Nell’espressione:
d~v ′
dt
∣∣∣∣∣O′
=d~v
dt
∣∣∣∣∣O
+ ~ω ∧ ~v + d~vOdt
∣∣∣∣∣O′+
d~ω
dt
∣∣∣∣∣O′∧ ~r + ~ω ∧ d~r
dt
∣∣∣∣∣O
+ ~ω ∧ (~ω ∧ ~r)
i vettori derivati nel tempo sono relativi allo stesso riferimento nelquale sono calcolate le loro derivate.
Questa circostanza consente di identificare tali derivate temporali conaltrettante velocità o accelerazioni e di scrivere:
~a ′ = ~a+ ~ω ∧ ~v + ~aO + ~̇ω ∧ ~r + ~ω ∧ ~v + ~ω ∧ (~ω ∧ ~r)
D. Galli
27
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
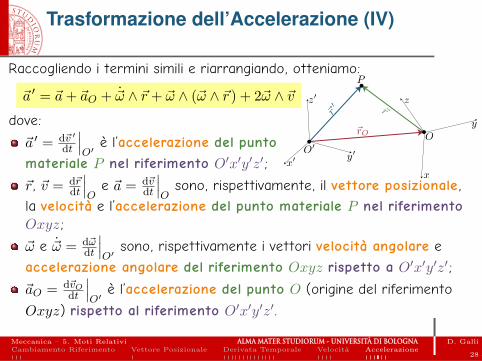
Trasformazione dell’Accelerazione (IV)
Raccogliendo i termini simili e riarrangiando, otteniamo:
~a ′ = ~a+ ~aO + ~̇ω ∧ ~r + ~ω ∧ (~ω ∧ ~r ) + 2~ω ∧ ~vdove:
~a ′ = d~v ′
dt
∣∣∣O′
è l’accelerazione del punto
materiale P nel riferimento O′x′y′z′;
~r, ~v = d~rdt
∣∣∣Oe ~a = d~v
dt
∣∣∣Osono, rispettivamente, il vettore posizionale,
la velocità e l’accelerazione del punto materiale P nel riferimento
Oxyz;
~ω e ~̇ω = d~ωdt
∣∣∣O′
sono, rispettivamente i vettori velocità angolare e
accelerazione angolare del riferimento Oxyz rispetto a O′x′y′z′;
~aO = d~vOdt
∣∣∣O′
è l’accelerazione del punto O (origine del riferimento
Oxyz) rispetto al riferimento O′x′y′z′.
D. Galli
28
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
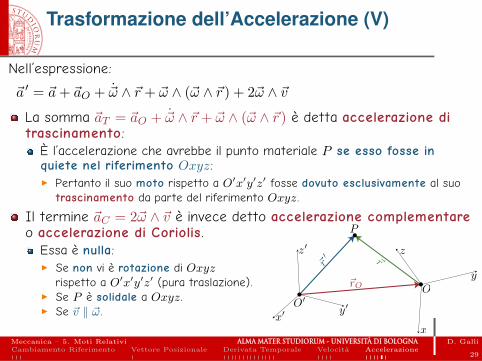
Trasformazione dell’Accelerazione (V)
Nell’espressione:
~a ′ = ~a+ ~aO + ~̇ω ∧ ~r + ~ω ∧ (~ω ∧ ~r ) + 2~ω ∧ ~v
La somma ~aT = ~aO + ~̇ω ∧ ~r + ~ω ∧ (~ω ∧ ~r ) è detta accelerazione di
trascinamento:È l’accelerazione che avrebbe il punto materiale P se esso fosse in
quiete nel riferimento Oxyz:I Pertanto il suo moto rispetto a O′x′y′z′ fosse dovuto esclusivamente al suo
trascinamento da parte del riferimento Oxyz.
Il termine ~aC = 2~ω ∧ ~v è invece detto accelerazione complementare
o accelerazione di Coriolis.Essa è nulla:I Se non vi è rotazione di Oxyz
rispetto a O′x′y′z′ (pura traslazione).I Se P è solidale a Oxyz.I Se ~v ‖ ~ω.
D. Galli
29
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione
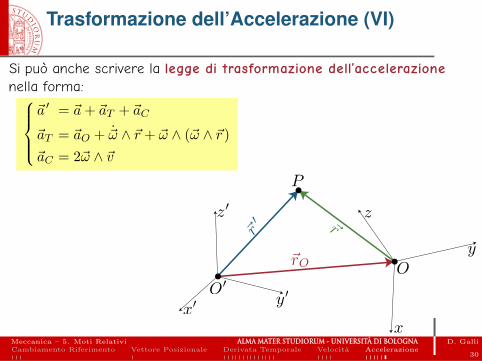
Trasformazione dell’Accelerazione (VI)
Si può anche scrivere la legge di trasformazione dell’accelerazione
nella forma:~a ′ = ~a+ ~aT + ~aC
~aT = ~aO + ~̇ω ∧ ~r + ~ω ∧ (~ω ∧ ~r )~aC = 2~ω ∧ ~v
D. Galli
30
Meccanica – 5. Moti RelativiCambiamento Riferimento Vettore Posizionale Derivata Temporale Velocità Accelerazione

Domenico GalliDipartimento di Fisica e Astronomia
[email protected]://www.unibo.it/sitoweb/domenico.galli
https://wiki-lhcb.bo.infn.it/bin/view/GalliDidattica
D. Galli
31
Meccanica – 5. Moti Relativi