Lezione 8 Dinamica del corpo rigido - fisica.uniud.itcobal/Lezione_IX_fisicaI.pdf · Centro di...
41
Lezione 8 Dinamica del corpo rigido Argomenti della lezione: Corpo rigido Centro di massa del corpo rigido Punto di applicazione della forza peso Punto di applicazione della forza peso Momento della forza peso Energia potenziale Rotazione nel piano Momento di interzia Energia cinetica di rotazione Teorema di Huyghens-Steiner
Transcript of Lezione 8 Dinamica del corpo rigido - fisica.uniud.itcobal/Lezione_IX_fisicaI.pdf · Centro di...
Lezione 8 Dinamica del corpo rigido
Argomenti della lezione: ! Corpo rigido
! Centro di massa del corpo rigido
! Punto di applicazione della forza peso
! Punto di applicazione della forza peso
! Momento della forza peso
! Energia potenziale
! Rotazione nel piano
! Momento di interzia
! Energia cinetica di rotazione
! Teorema di Huyghens-Steiner
Corpo rigido Definizione Un corpo rigido è un oggetto o meglio un sistema di
punti materiali in cui le distanze relative NON cambiano
Un corpo rigido diventa quindi la definizione di un oggetto reale esteso.
0)( =IRNON hanno risultante
Le forze interne (forze di coesione che mantengono invariate le distnze fra i punti) hanno le seguenti caratteristiche:
NON fanno lavoro
NON fanno momento 0)( =IM0)( =IW
Corpo rigido
Tale sistema è quindi descritto dalle seguenti equazioni dinamiche
Le forze esterne sono responsabili del moto del Centro di Massa
Il lavoro delle forze esterne varia l’energia cinetica del sistema
I momenti delle forze esterne sono responsabili delle rotazioni intorno ad O (punto fisso o centro di massa del sistema)
CMe maR =)(
( )∑ ×==i
iiiOe
O mdtd
dtd vrLM )(
( ) AcinBcine EEBAW ,,)( −=→
Corpo rigido
Come è fatto un corpo rigido??
Esso è formato da un insieme continuo di punti materiali.
Quindi tutte le somme diventano degli integrali!
Estendendo quindi ciò che si è visto per un insieme discreto di punti materiali le singole masse saranno infinitesime, ossia
dmmi ⇒
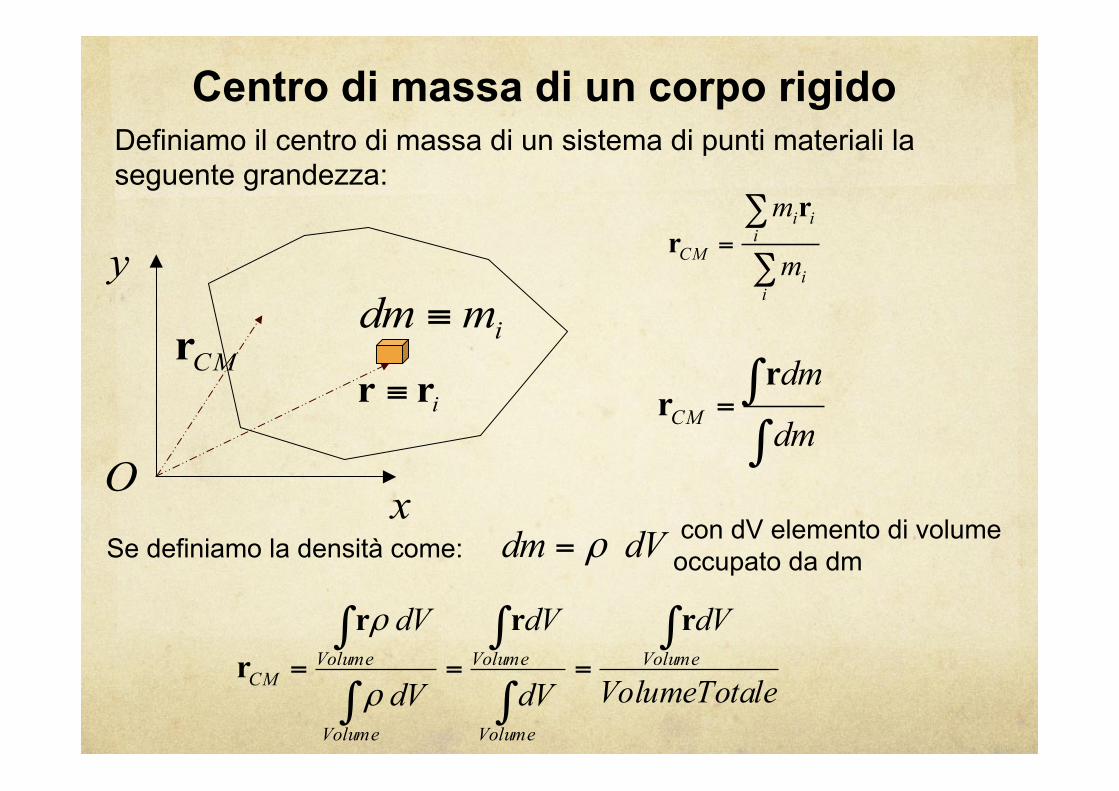
Centro di massa di un corpo rigido Definiamo il centro di massa di un sistema di punti materiali la seguente grandezza:
y
xO
CMrirr ≡
∑
∑=
ii
iii
CM m
m rr
imdm ≡
∫∫=dm
dmCM
rr
Se definiamo la densità come: dVdm ρ= con dV elemento di volume occupato da dm
leVolumeTota
dV
dV
dV
dV
dVVolume
Volume
Volume
Volume
VolumeCM
∫
∫
∫
∫
∫===
rrrr
ρ
ρ
Centro di massa di un corpo rigido
Punto di applicazione della forza peso Centro di massa
Consideriamo un corpo continuo sottoposto alla forza peso:
dmdm g →La risultante di tutte queste forze parallele fra di loro è:
ggg mdmdm == ∫∫E tale forza è applicata nel centro di massa del sistema.
Momento della forza peso Centro di massa
Il momento della forza peso rispetto a un polo fisso (ad esempio l’origine dell’asse delle coordinate) è dato da:
( ) grgrM ×=×= ∫∫ dmdm
∫∫∫∫
=⇒= dmdmdm
dmCMCM rr
rr
ma:
( ) grgrgrM mmdm CMCMCM ×=×=×= ∫
Energia potenziale Centro di massa
Analogamente a quanto visto in precedenza per il calcolo dell’energia potenziale:
∫∫ == zdmggzdmEp
∫∫∫∫
=⇒= dmzzdmdm
zdmz CMCM
ma:
CMCMp mgzdmgzzdmggzdmE ==== ∫∫∫Se il corpo è libero ed agisce solo la forza peso la traiettoria del CM è verticale rettilinea o parabolica a seconda delle cond. iniz.

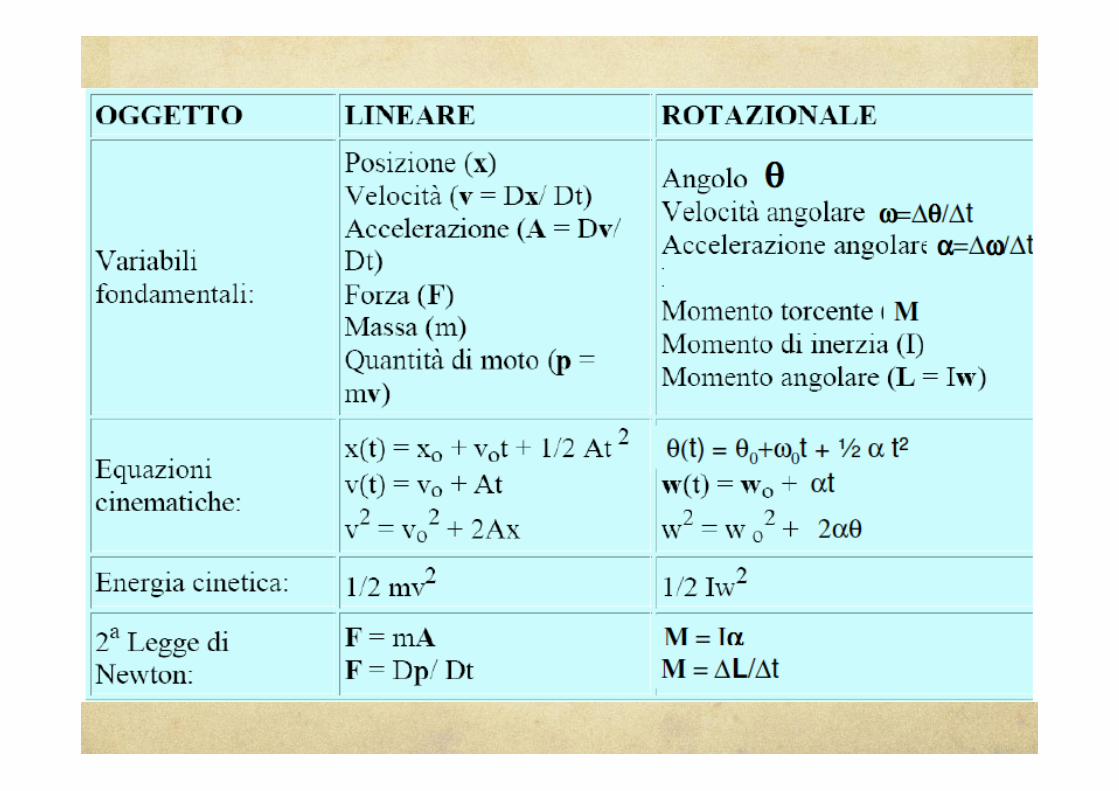
Moti del corpo rigido
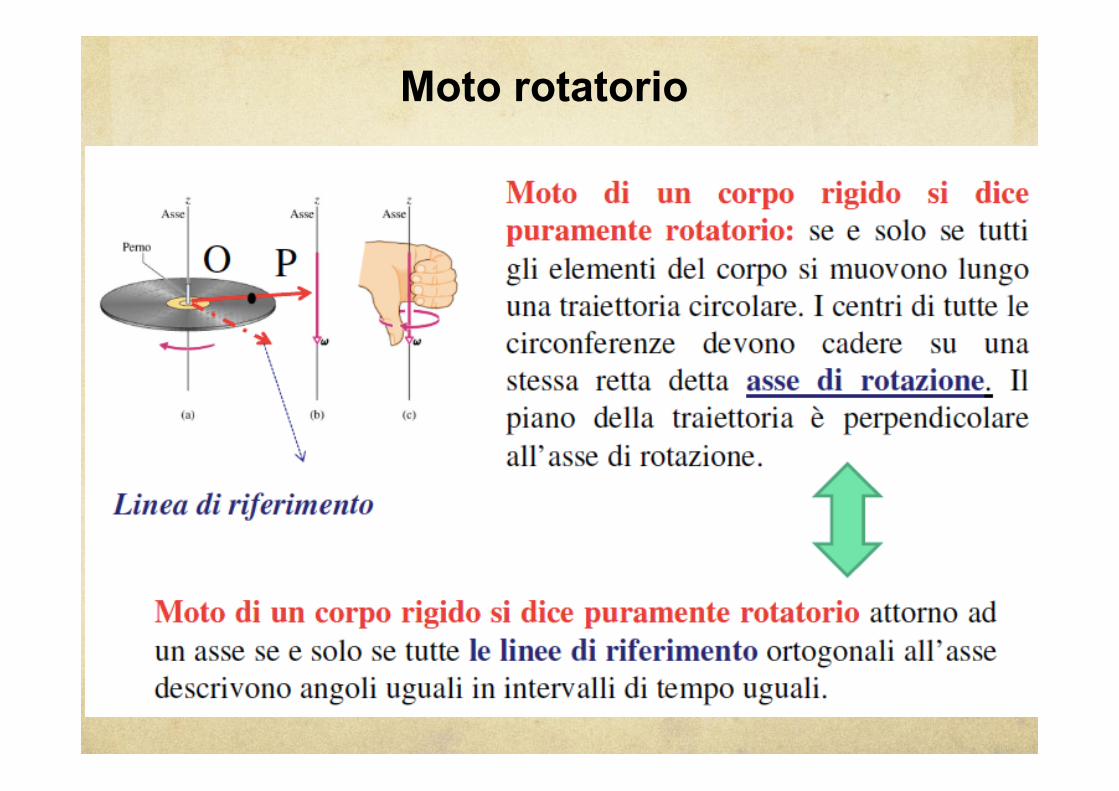
Moto rotatorio
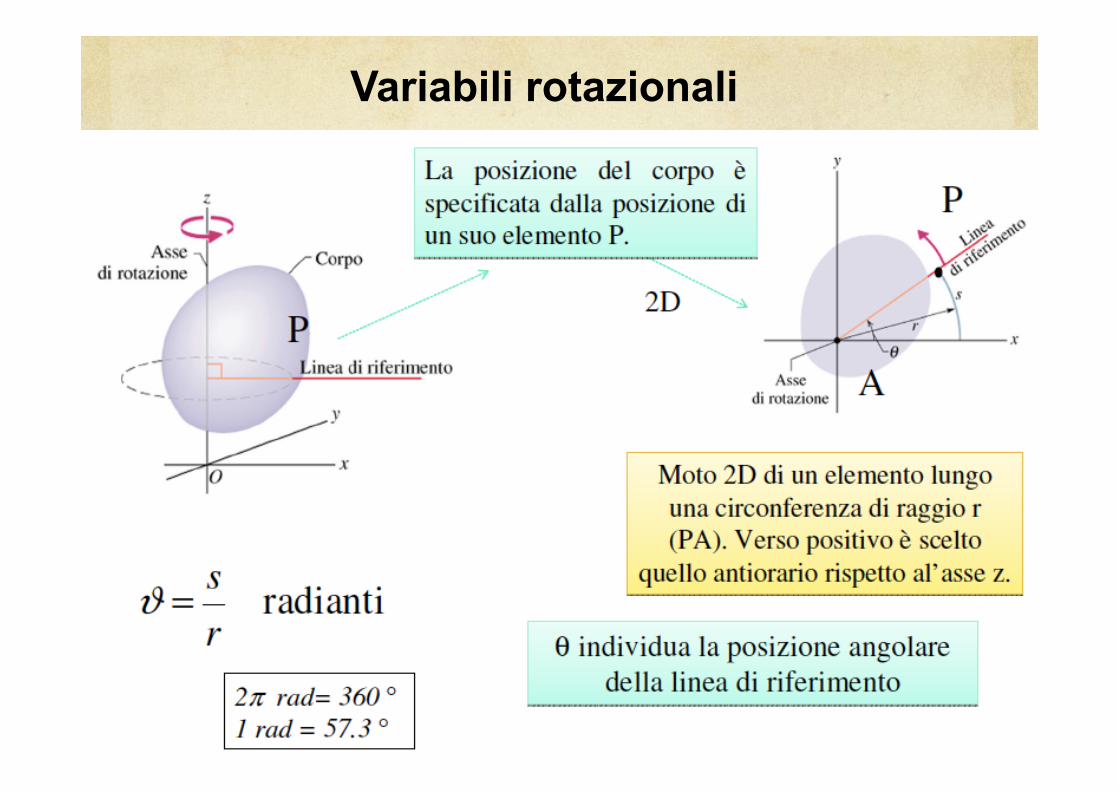
Variabili rotazionali
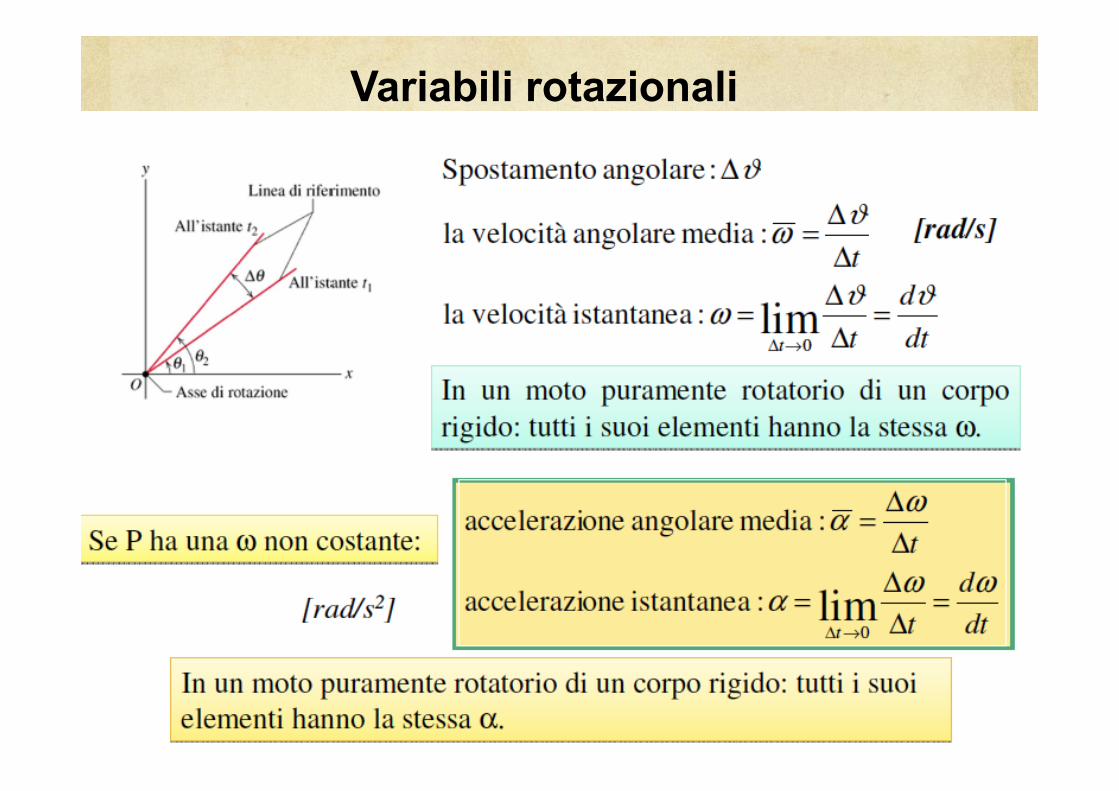
Variabili rotazionali
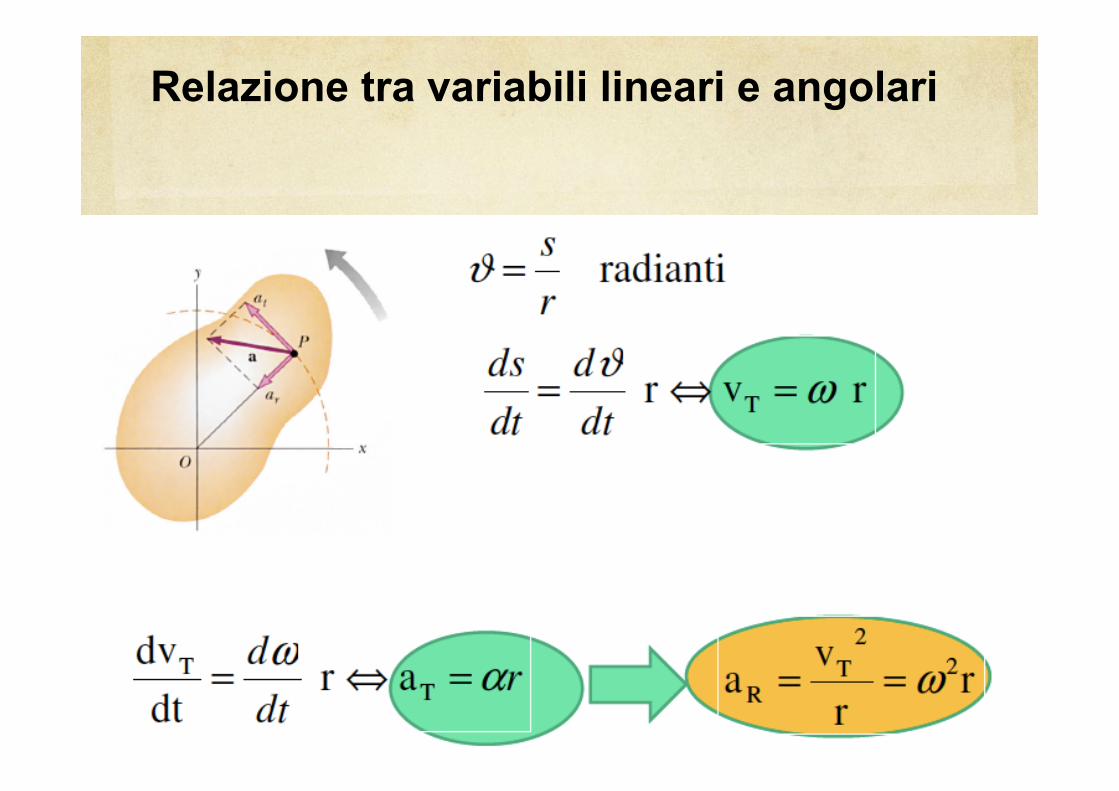
Relazione tra variabili lineari e angolari
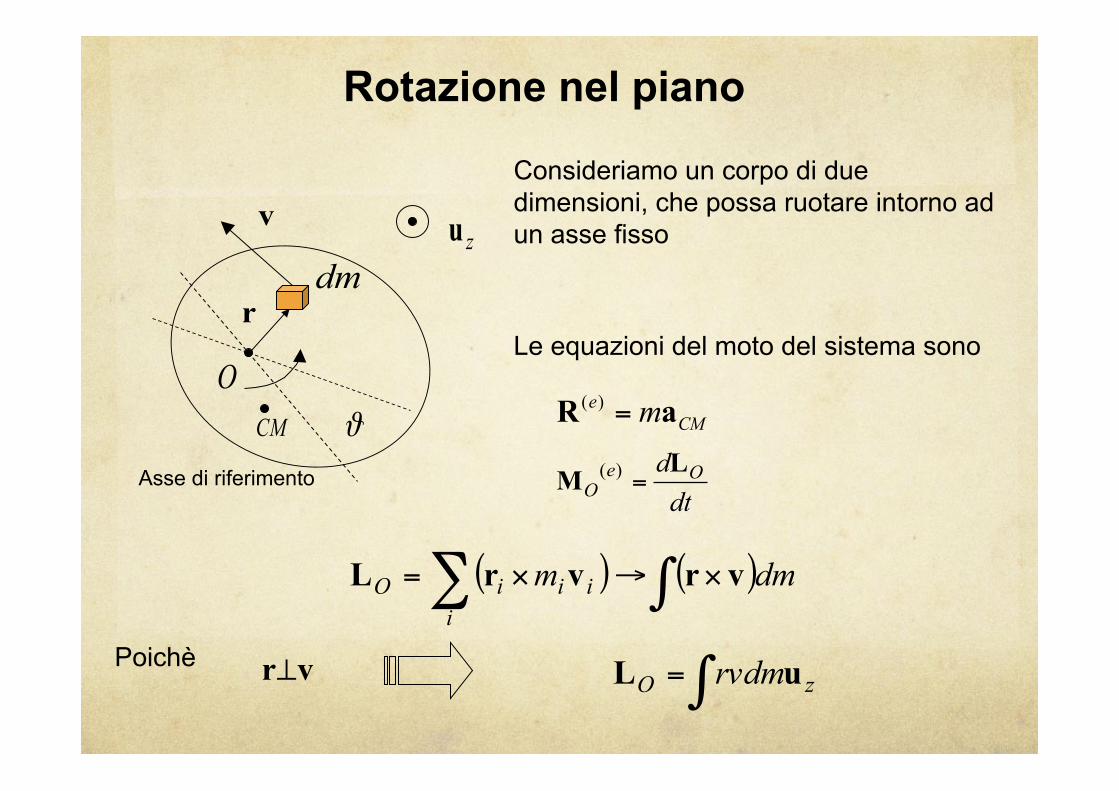
Rotazione nel piano
zu
Oϑ
dmr
CM
vConsideriamo un corpo di due dimensioni, che possa ruotare intorno ad un asse fisso
Asse di riferimento
Le equazioni del moto del sistema sono
CMe maR =)(
dtd Oe
OLM =)(
( ) ( )∫∑ ×→×= dmmi
iiiO vrvrL
Poichè vr⊥ ∫= zO rvdmuL
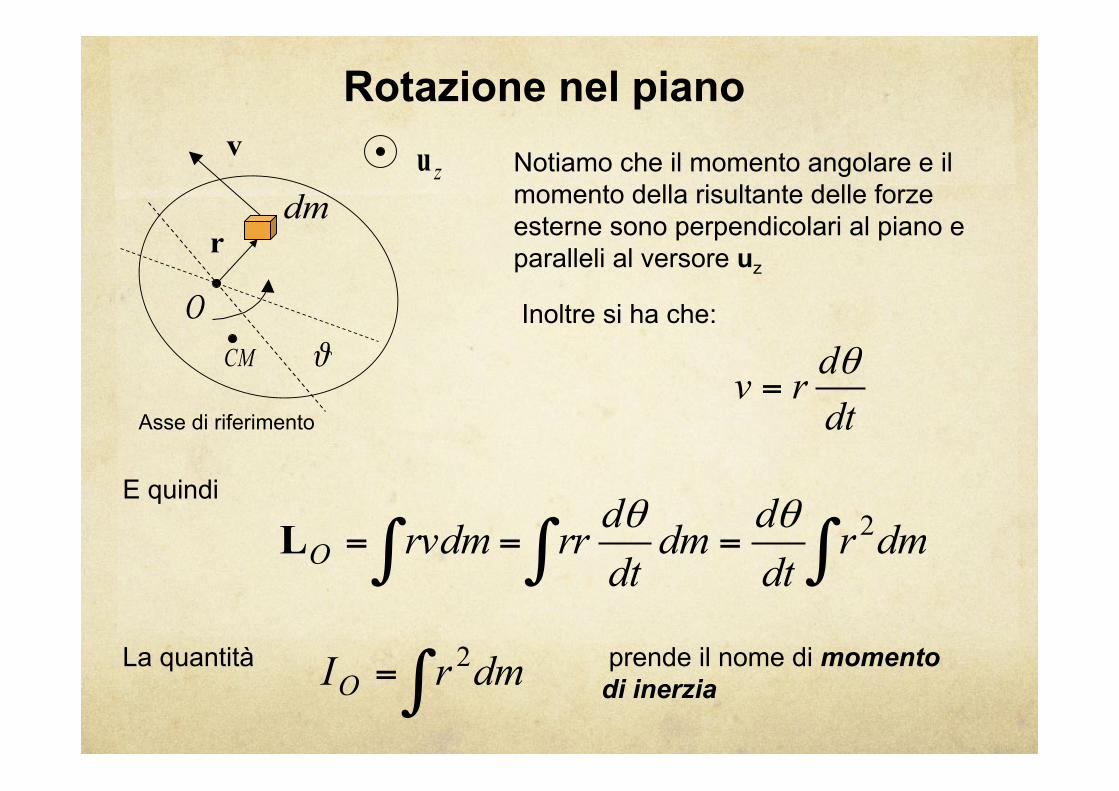
Rotazione nel piano Notiamo che il momento angolare e il momento della risultante delle forze esterne sono perpendicolari al piano e paralleli al versore uz
zu
Oϑ
rdm
CM
v
Asse di riferimento
Inoltre si ha che:
dtdrv θ
=
E quindi
∫∫∫ === dmrdtddm
dtdrrrvdmO
2θθL
La quantità prende il nome di momento di inerzia ∫= dmrIO
2
Momento di inerzia
Si è appena introdotta una nuova quantità che prende il nome di momento di inerzia
∫= dmrIO2
∑=i
iiO mrI 2
Nel caso continuo
Nel caso discreto
Il momento di inerzia è legato a come è distribuita la massa attorno all’asse di rotazione
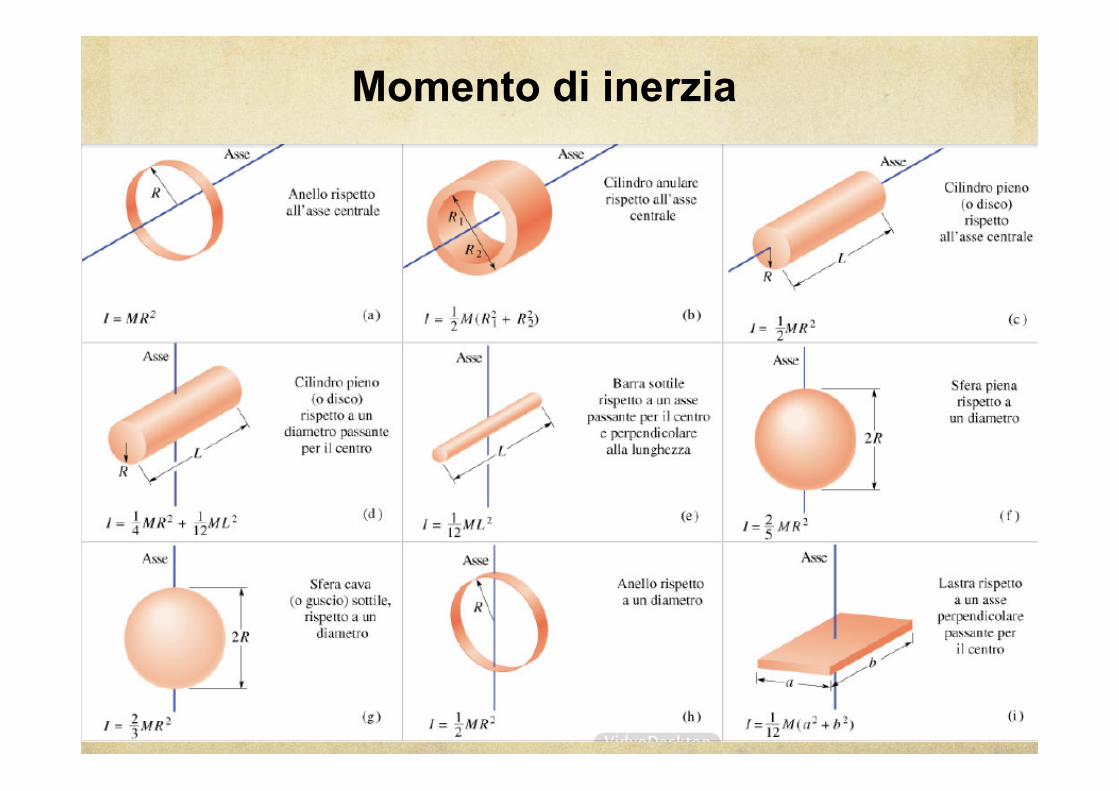
Momento di inerzia
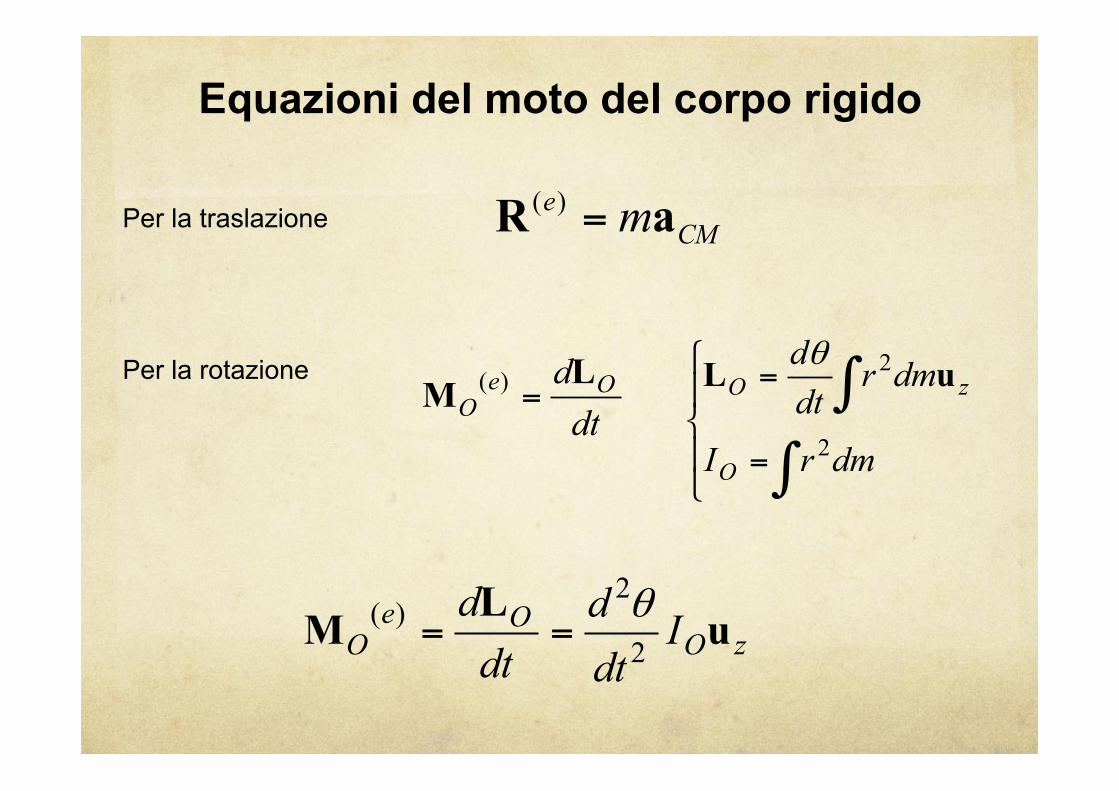
Equazioni del moto del corpo rigido
Per la traslazione
Per la rotazione
CMe maR =)(
dtd Oe
OLM =)(
⎪⎩
⎪⎨
⎧
=
=
∫∫dmrI
dmrdtd
O
zO
2
2 uL θ
zOOe
O Idtd
dtd uLM 2
2)( θ
==
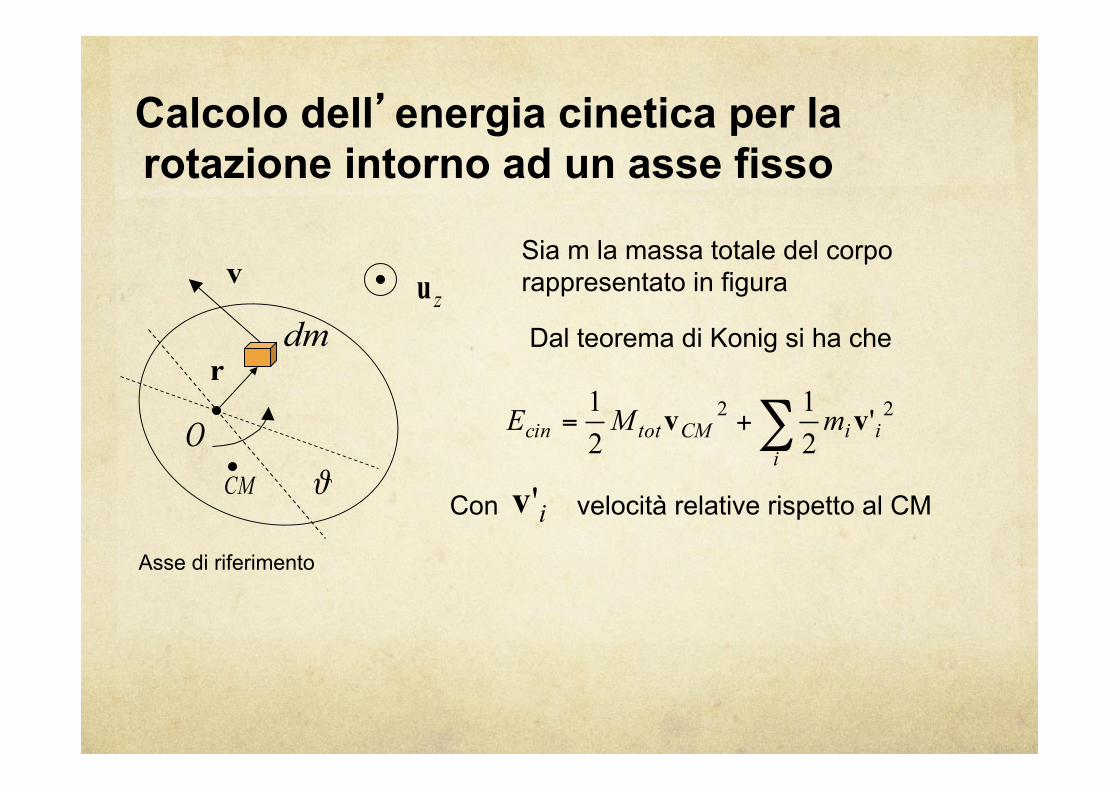
Sia m la massa totale del corpo rappresentato in figura zu
Oϑ
rdm
CM
v
Asse di riferimento
Dal teorema di Konig si ha che
∑+=i
iiCMtotcin mME 22 '21
21 vv
Con i'v velocità relative rispetto al CM
Calcolo dell’energia cinetica per la rotazione intorno ad un asse fisso

zu
Oϑ
rdm
CM
v
Asse di riferimento
Dall’analisi del moto di rotazione intorno ad O di tutte le masse infinitesime
Ma
∫= dmrIO2
∫∑ == 22 '21'
21 vv dmmE
iiicin
dtdrv θ
=dmr
dtd
dtdrdmEcin ∫∫ ⎟
⎠
⎞⎜⎝
⎛=⎟
⎠
⎞⎜⎝
⎛= 2
222
21
21 θθ
e in definitiva 2
21
⎟⎠
⎞⎜⎝
⎛=
dtdIE Ocinθ
Calcolo dell’energia cinetica per la rotazione intorno ad un asse fisso
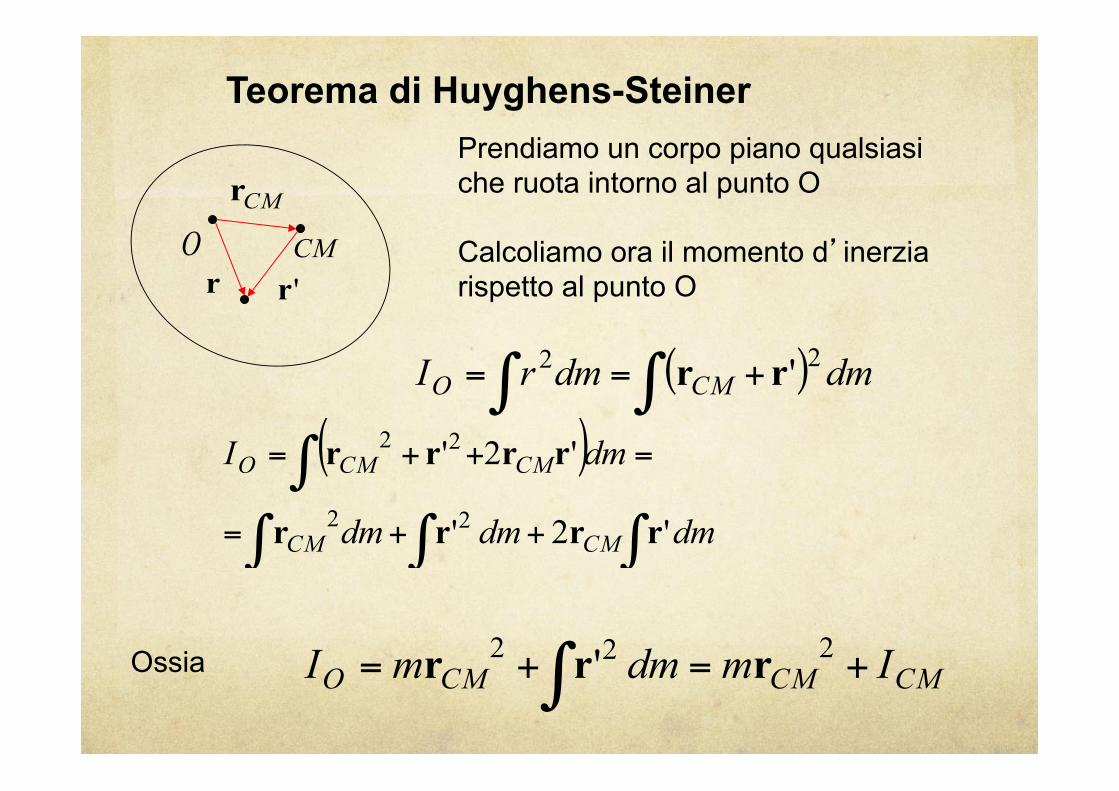
Prendiamo un corpo piano qualsiasi che ruota intorno al punto O
O CM
CMr
r 'rCalcoliamo ora il momento d’inerzia rispetto al punto O
( )∫∫ +== dmdmrI CMO22 'rr
( )
∫∫∫∫
++=
=++=
dmdmdm
dmI
CMCM
CMCMO
'2'
'2'
22
22
rrrr
rrrr
CMCMCMO ImdmmI +=+= ∫ 222 ' rrrOssia
Teorema di Huyghens-Steiner
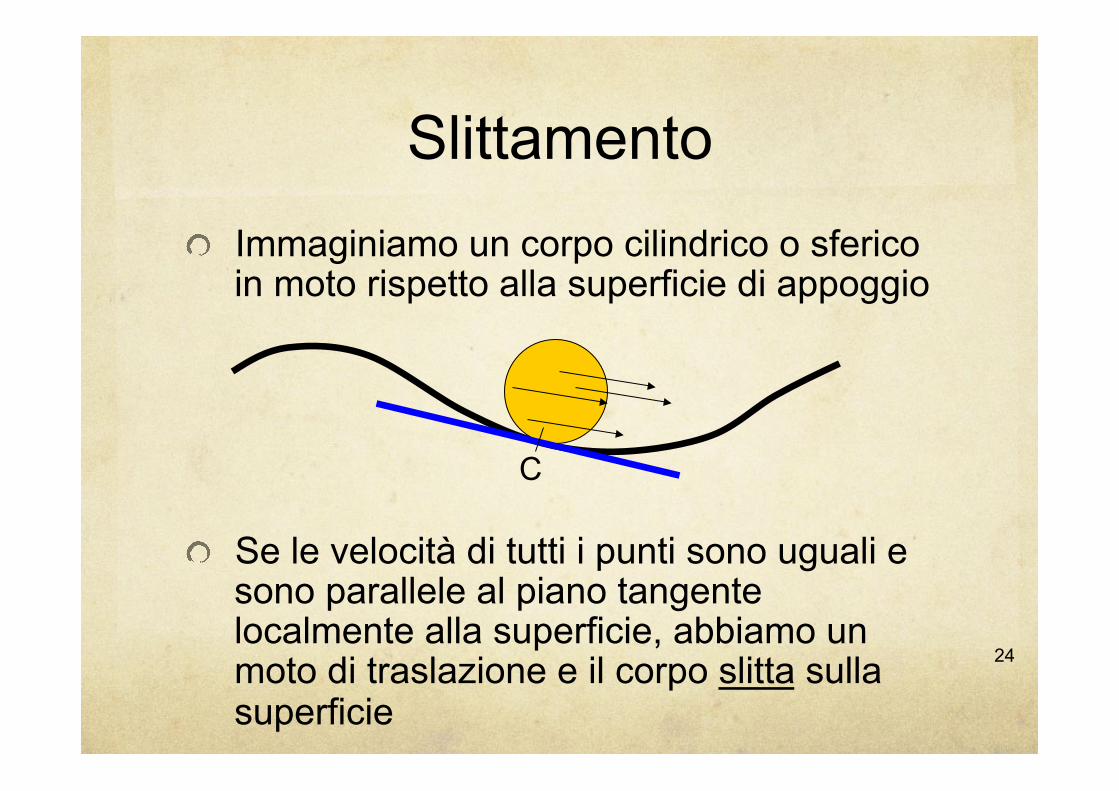
Slittamento ! Immaginiamo un corpo cilindrico o sferico
in moto rispetto alla superficie di appoggio
! Se le velocità di tutti i punti sono uguali e sono parallele al piano tangente localmente alla superficie, abbiamo un moto di traslazione e il corpo slitta sulla superficie
C
24
Rotolamento ! In generale un corpo può anche rotolare sulla
superficie
! Se il punto di contatto C tra corpo e superficie è fermo, istante per istante, si ha rotolamento puro
! Altrimenti avremo contemporaneamente slittamento e rotolamento
25
Rotolamento puro ! Tra superficie e corpo esiste una forza di attrito
che mantiene fermo il punto di contatto C, istante per istante
! Questa è la forza di attrito statico
! La velocità del punto C (o di qualsiasi altro punto) a distanza r dal CM è
€
v
C= v
CM+ v
C
*= v
CM+ ω × r
26
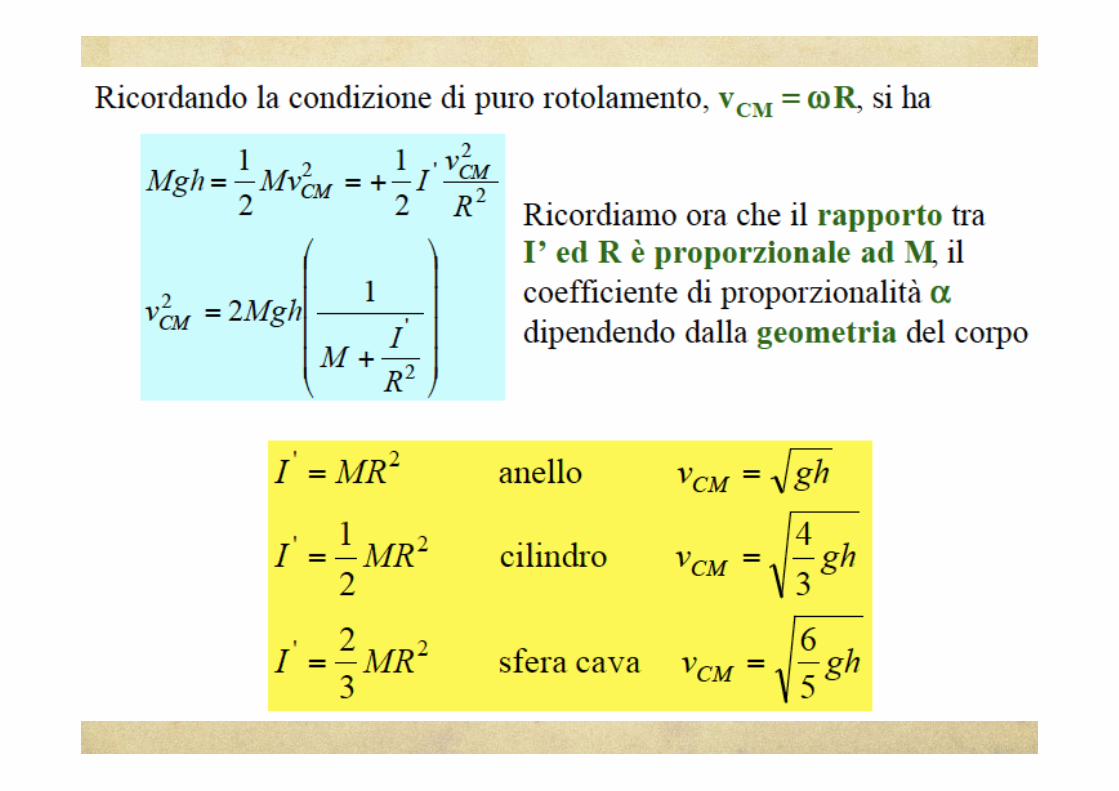
Rotolamento puro ! La condizione di puro rotolamento è
ovvero
! In modulo la velocità del CM è
! E l’accelerazione
! Cioè nel moto di puro rotolamento esiste una relazione precisa tra velocità del CM e velocità angolare
€
v
CM= − ω × r
€
v
C= 0
€
vCM
=ωr
€
aCM
=αr
27
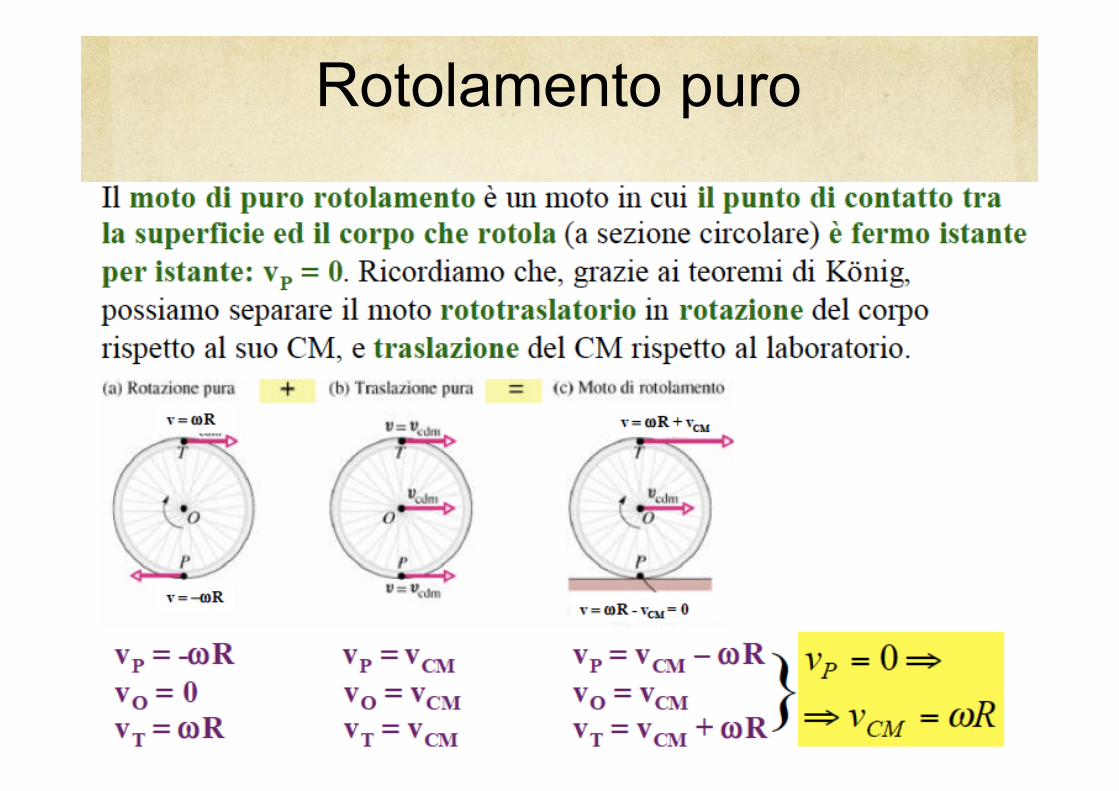
Rotolamento puro
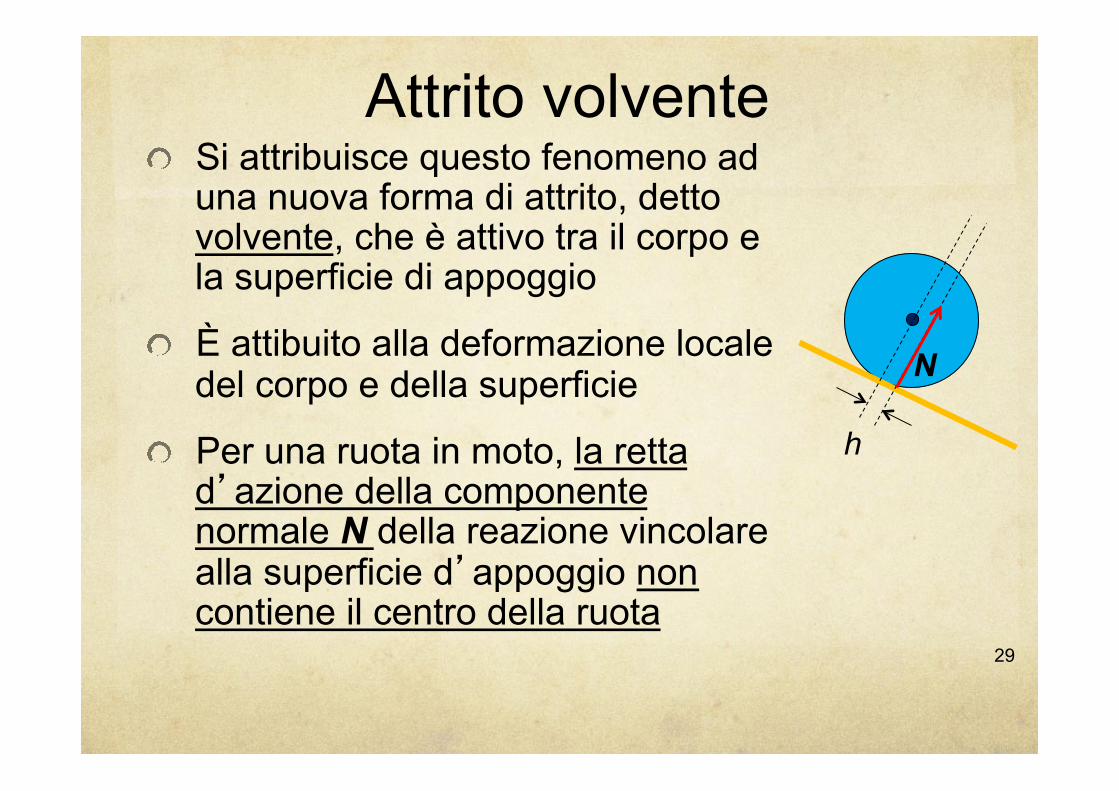
Attrito volvente ! Si attribuisce questo fenomeno ad
una nuova forma di attrito, detto volvente, che è attivo tra il corpo e la superficie di appoggio
! È attibuito alla deformazione locale del corpo e della superficie
! Per una ruota in moto, la retta d’azione della componente normale N della reazione vincolare alla superficie d’appoggio non contiene il centro della ruota
N
h
29
Attrito volvente • L’effetto e` schematizzato con l’azione di un
momento che si oppone al moto (h è il braccio di N ed e` detto coefficiente di attrito volvente)
• L’effetto dell’attrito volvente è sempre molto minore di quello dell’attrito radente e statico, per cui è generalmente trascurabile
• Da qui deriva il grande vantaggio che si ottiene, in molti casi, di dotare i veicoli di ruote piuttosto che di pattini
hNv =τ
30
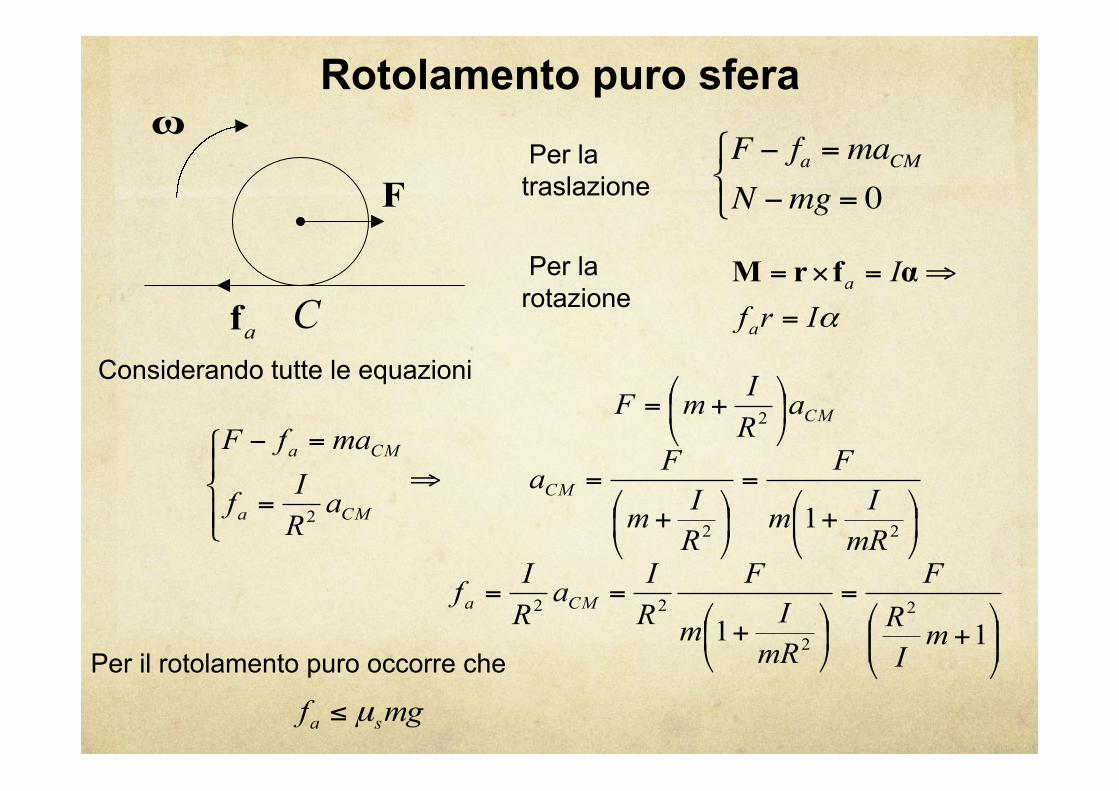
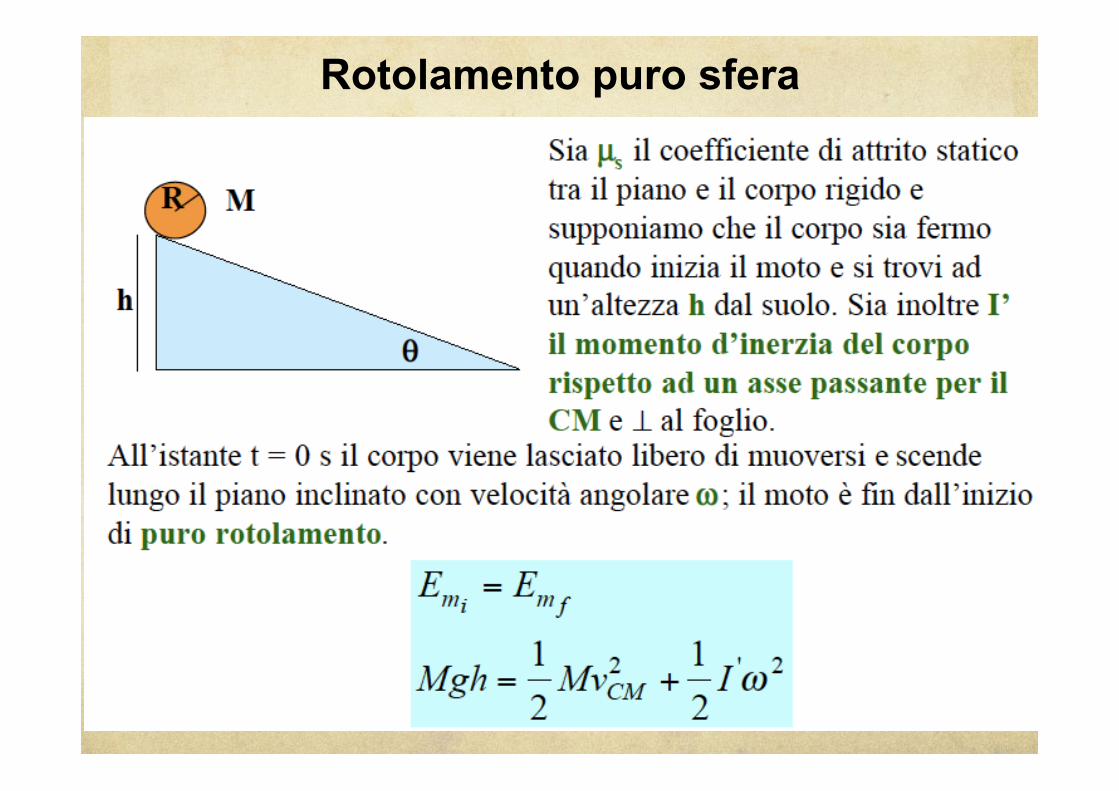
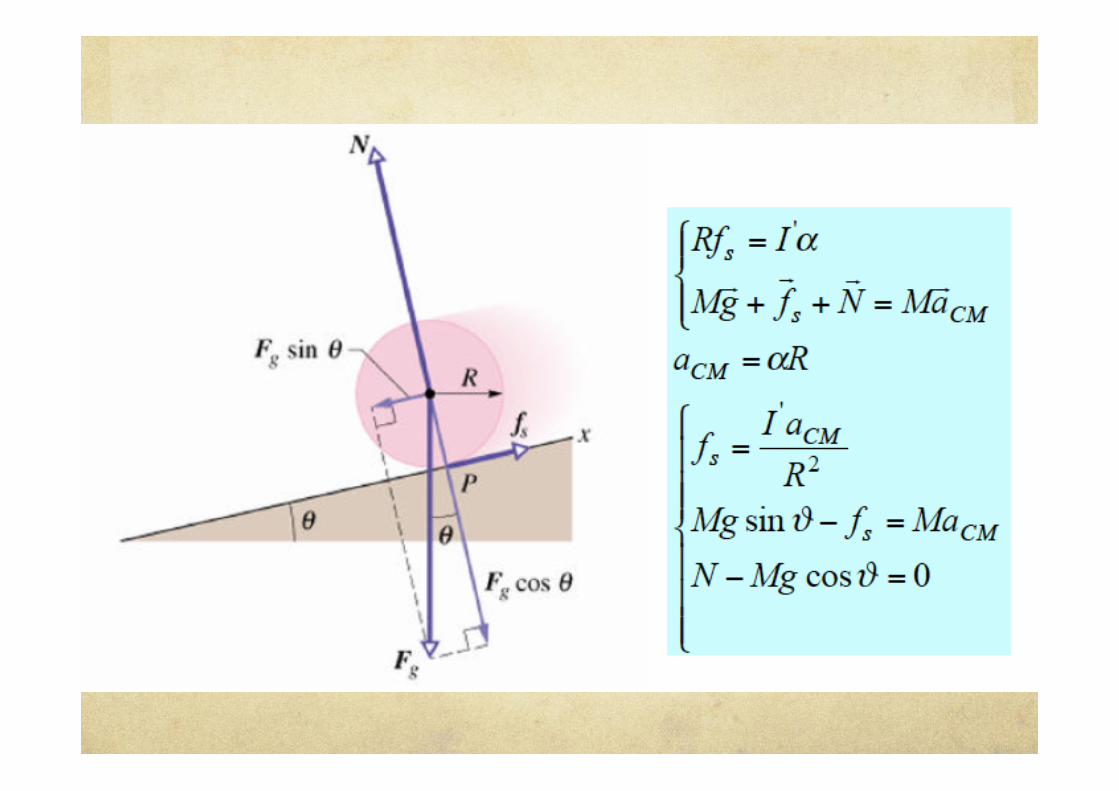
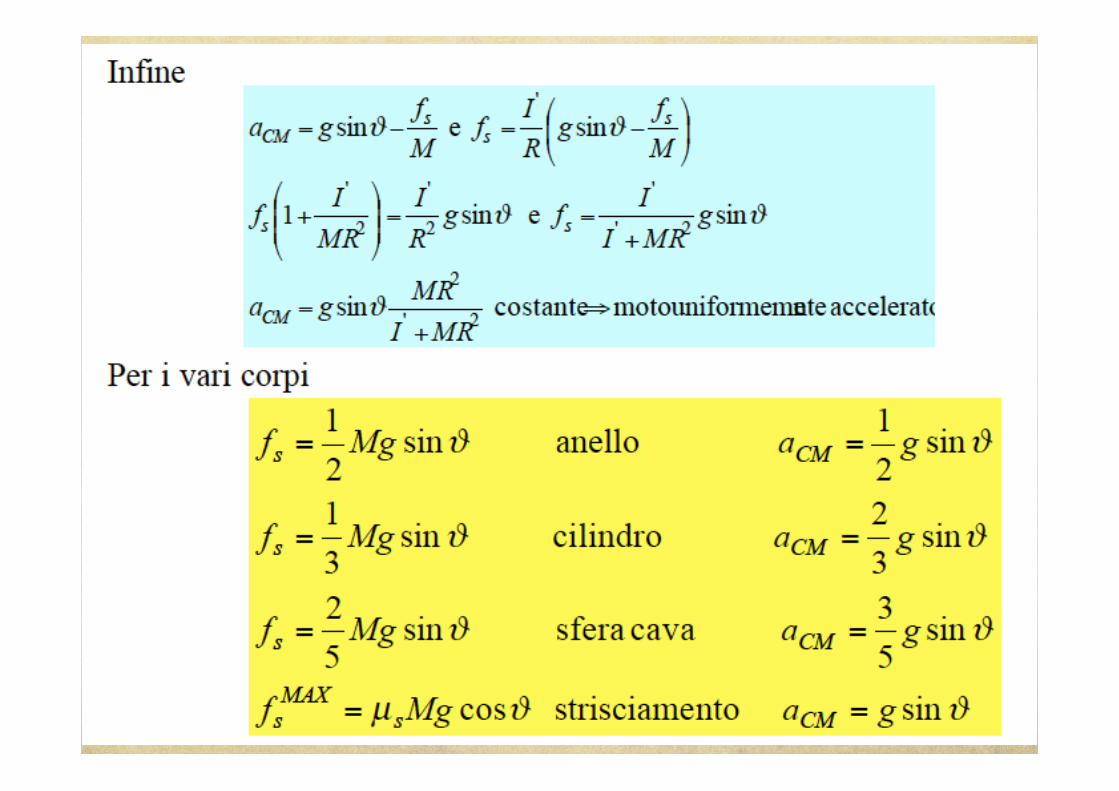
Rotolamento puro sfera
Per la traslazione
F − fa =maCMN −mg = 0
αIrfI
a
a
=
⇒=×= αfrM
af C
F
ω
Per la rotazione
Considerando tutte le equazioni
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=
⎟⎠
⎞⎜⎝
⎛ +==
⎟⎠
⎞⎜⎝
⎛ +=
⎟⎠
⎞⎜⎝
⎛ +=
⎟⎠
⎞⎜⎝
⎛ +=
⇒⎪⎩
⎪⎨
⎧
=
=−
11
1
2
2
22
22
2
2
mIRF
mRIm
FRIa
RIf
mRIm
F
RIm
Fa
aRImF
aRIf
mafF
CMa
CM
CM
CMa
CMa
mgf sa µ≤
Per il rotolamento puro occorre che
Rotolamento puro sfera
M M
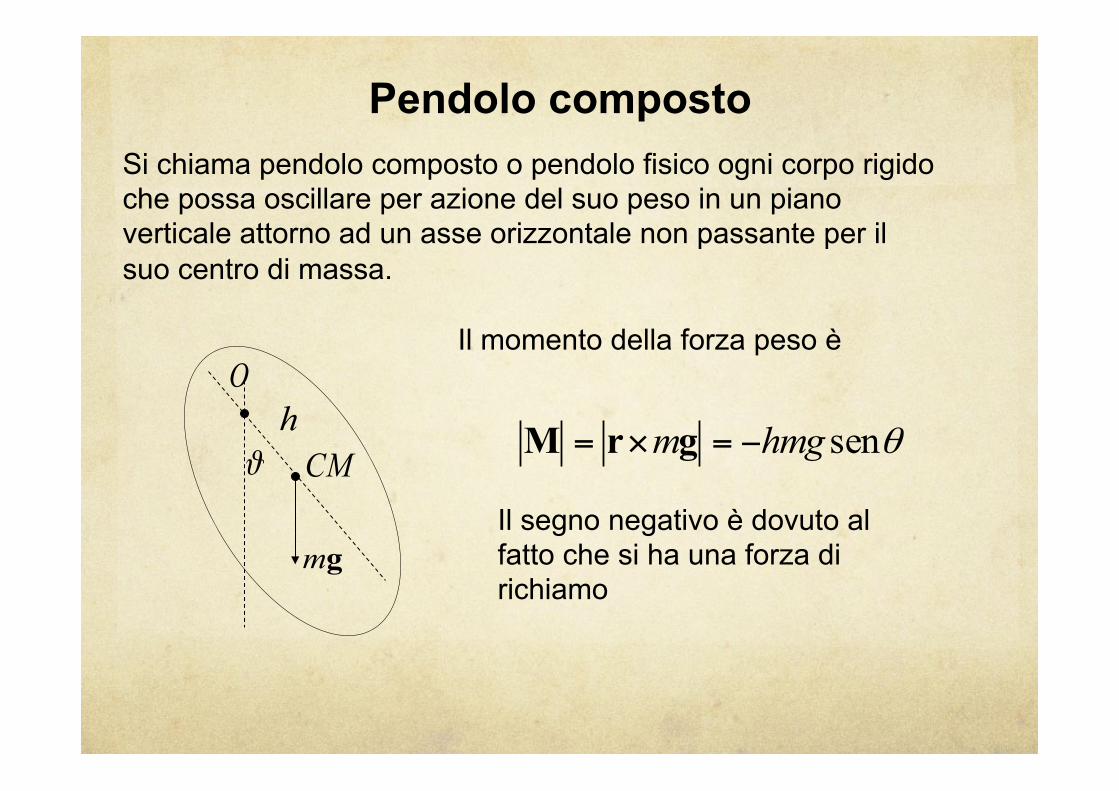
Pendolo composto Si chiama pendolo composto o pendolo fisico ogni corpo rigido che possa oscillare per azione del suo peso in un piano verticale attorno ad un asse orizzontale non passante per il suo centro di massa.
ϑh
O
gm
CM
Il momento della forza peso è
θsenhmgm −=×= grM
Il segno negativo è dovuto al fatto che si ha una forza di richiamo
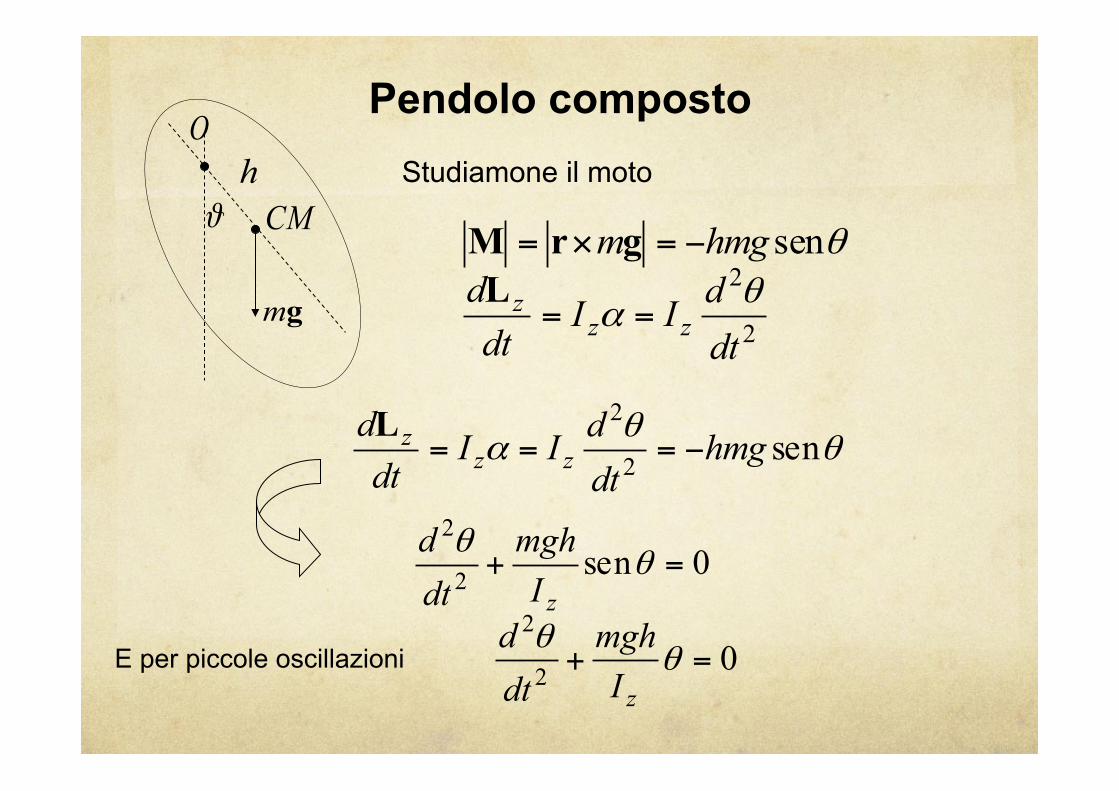
Pendolo composto Studiamone il moto
θsenhmgm −=×= grM
2
2
dtdII
dtd
zzz θ
α ==L
θθ
α sen2
2hmg
dtdII
dtd
zzz −===L
0sen2
2=+ θ
θ
zImgh
dtd
E per piccole oscillazioni 02
2=+ θ
θ
zImgh
dtd
ϑh
O
gm
CM
Pendolo composto
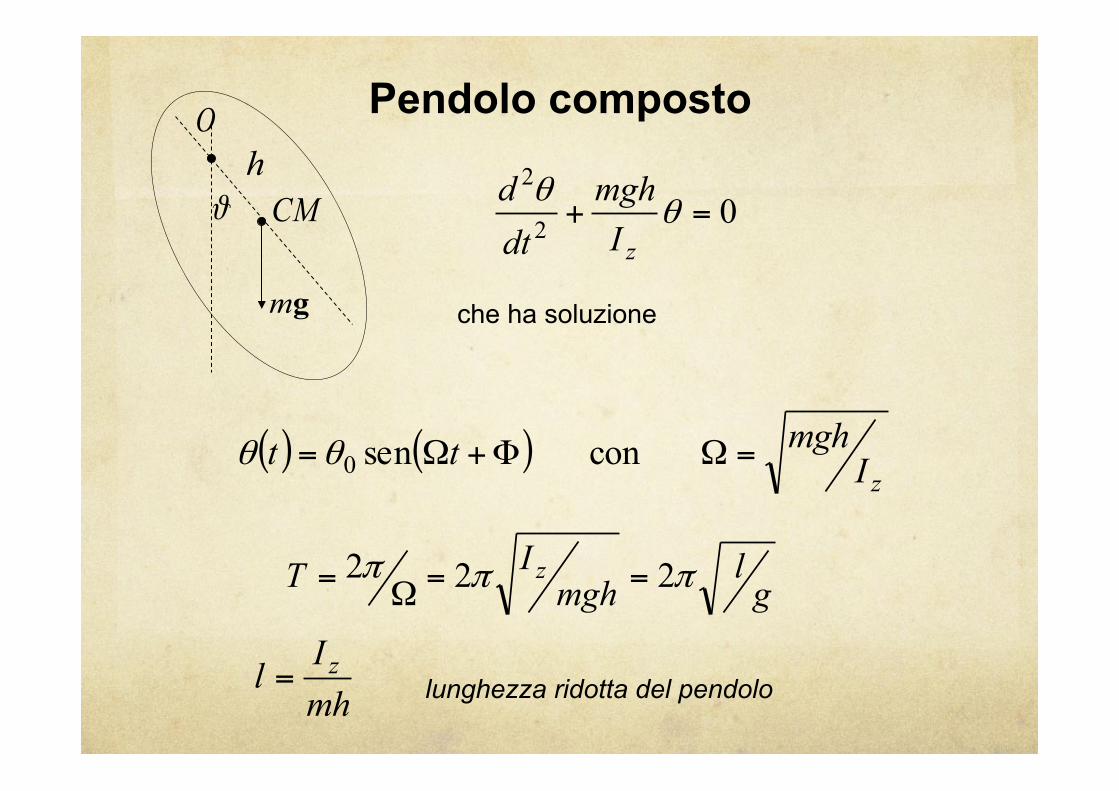
che ha soluzione
02
2=+ θ
θ
zImgh
dtd
( ) ( )zI
mghtt =ΩΦ+Ω= con sen0θθ
gl
mghIT z πππ 222 ==Ω=
mhIl z= lunghezza ridotta del pendolo
ϑh
O
gm
CM
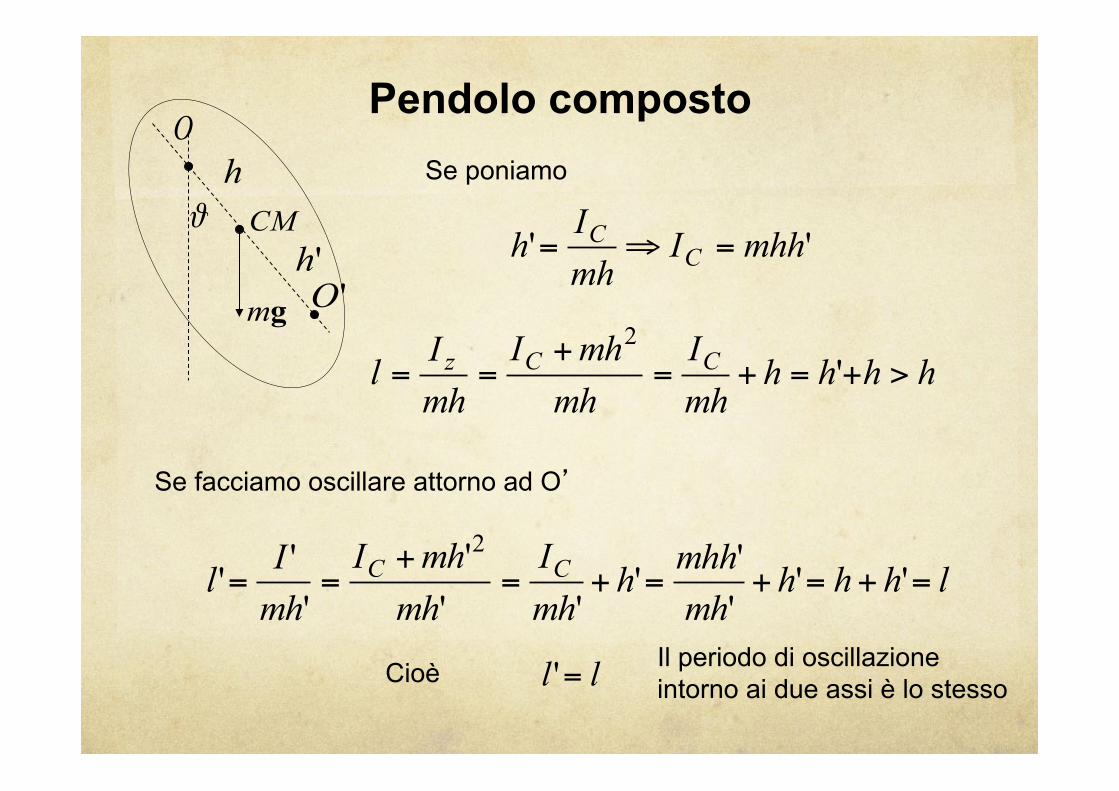
Pendolo composto
gm
O
ϑhCM
'h'O
Se poniamo
'' mhhImhIh CC =⇒=
hhhhmhI
mhmhI
mhIl CCz >+=+=
+== '
2
Se facciamo oscillare attorno ad O’
lhhhmhmhhh
mhI
mhmhI
mhIl CC =+=+=+=
+== ''
'''
'''
'''
2
ll =' Cioè Il periodo di oscillazione intorno ai due assi è lo stesso