Laboratori di innovazione didattica - Matematica & Realtà · Il sistema GPS: una prima descrizione...
31
MATEMATICA & REALTA’ www.matematicaerealta.it SISTEMA DI POSIZIONAMENTO e (NAVIGAZIONE SATELLITARE) Primo Brandi – Anna Salvadori Dipartimento di Matematica e Informatica Università degli Studi di Perugia email: [email protected] Laboratori di innovazione didattica
Transcript of Laboratori di innovazione didattica - Matematica & Realtà · Il sistema GPS: una prima descrizione...
MATEMATICA & REALTA’
www.matematicaerealta.it
SISTEMA DI POSIZIONAMENTO
e
(NAVIGAZIONE SATELLITARE)
Primo Brandi – Anna Salvadori
Dipartimento di Matematica e Informatica
Università degli Studi di Perugia email: [email protected]
Laboratori di innovazione didattica
Sistema di posizionamento e navigazione satellitare 2
INDICE
Fasi del percorso 3
Introduzione 5
1 Sistema di posizionamento satellitare 5
Una prima descrizione sommaria 7
2 Indirizzi e coordinate di riferimento 8
2.1 Coordinate di riferimento caso uni-dimensionale 8
2.2 Coordinate di riferimento caso bi-dimensionale 8
2.3 Coordinate di riferimento caso tri-dimensionale 10
2.4 Trasformazione di coordinate 11
2.5 Coordinate cilindriche 12
2.6 Coordinate sferiche o coordinate polari nello spazio 13
2.7 Coordinate geografiche, latitudine e longitudine 14
2.8 Localizzazione di un punto attraverso punti noti 16
3 Il sistema di localizzazione GPS 18
3.1 Un primo modello teorico 18
3.2 Un modello rettificato 25
3.3 Note supplementari sul sistema GPS 30
P. Brandi - A. Salvadori, Matematica&Realtà 3
Fasi del percorso
I) Sistema di posizionamento globale satellitare Il problema nel suo contesto. Esigenze che conducono alla nascita di un sistema di
posizionamento globale (GPS Global positioning system). Il primo sistema e sue
evoluzioni.
Applicazioni di tipo civile [navigazione per terra, cielo e mare; rilievi topografici
anche di alta precisione; rilievi cinematici (posizione e velocità) di alta precisione;
tele-sorveglianza; monitoraggio delle deformazioni della crosta terrestre, etc.]
Il sistema GPS: una prima descrizione dei tre segmenti del sistema [segmento
spaziale, segmento di controllo, segmento utente]
II) Il problema del posizionamento
Posizionamento assoluto e posizionamento relativo. Sistema cartesiano 2D a partire
da tre punti non allineati. Sistema 3D a partire da 4 punti non complanari. Il poligono
di tiro. Il problema del posizionamento sulla retta, nel piano e nello spazio.
Applicazioni alla topografia. Coordinate geografiche, sferiche e cartesiane.
III) Il principio di funzionamento del sistema GPS
Contributo di uno, due, tre satelliti ai fini della localizzazione. Localizzazione del
ricevitore come intersezione di tre sfere ovvero come soluzione di un sistema di tre
equazioni non lineari in tre incognite. Il tempo come misura indiretta della distanza.
Le misure astronomiche. Il telemetro a ultrasuoni o laser.
IV) Il problema della misura simultanea delle distanze satelliti-ricevitore
Precisione richiesta nelle misure. Gli orologi atomici. Offset degli orologi. L’aggiunta
di una quarta incognita. Il sistema di quattro equazioni non lineari in quattro
incognite.
V) Soluzione del problema GPS
Esistenza della soluzione. La soluzione terrestre e la soluzione spaziale. Il problema
di Apollonio nel piano e nello spazio. Soluzione del problema piano e spaziale di
Apollonio da parte di Newton e Férmat, rispettivamente. Il problema GPS come
problema di Apollonio. Soluzione per via geometrica del problema GPS.
Calcolo della soluzione GPS per via algebrica.
Algoritmo iterativo per il calcolo approssimato della soluzione terrestre.

Sistema di posizionamento e navigazione satellitare 4
VI) Il segmento spaziale e il segmento di controllo Disposizione dei satelliti. Piani orbitali e loro inclinazione. Orbite e periodo
di rotazione. Strumenti a bordo. Orologi a bordo, loro accuratezza e loro
sincronismo. Il segnale emesso dai satelliti. Stazioni di monitoraggio.
Stazione principale di controllo. Posizione accurata dei satelliti e descrizione
dell’orbita. Flusso dati verso i satelliti.
VII) Ancora sul segmento spaziale Moto ideale dei satelliti [orbita ellittica; posizione predicibile nel tempo
grazie alla leggi di Keplero]. Moto reale dei satelliti [fluttuazioni periodiche
e degradazione delle orbite; effetti gravitazionali dovuti alla disomogeneità
della terra e alla presenza della luna e del sole; disturbo atmosferico
(ionosferico e troposferico)]. Descrizione locale dell’orbita.
Effetti sul segnale [effetto multipath; rumore elettronico di misura, etc.]
VIII) Il segmento utente Apparecchio ricevente delle dimensioni di un cellulare per la elaborazione in
tempo reale della posizione. Navigatore 3D. Sistema di acquisizione dati
mediante una rete di punti riceventi.
IX) Il problema della navigazione Rilevamento dinamico della propria posizione in tempo reale su una mappa
digitale. Cammino di minima lunghezza (shortest) e cammino di minimo
tempo (quickest) su un grafo. Algoritmi per il calcolo.
Approfondimenti opzionali
X) La misura del tempo Gli strumenti di misura del tempo nel corso dei secoli. L’unità di misura del
tempo nel S.I. Il secondo atomico e gli orologi atomici. Alcuni sistemi di
riferimento. Tempo siderale, tempo solare, tempo civile, tempo universale. Il
Master Clock USA.
XI) Curve geodetiche o cammini di minima lunghezza Curve geodetiche nel piano, su un cubo, su una sfera, su un ellissoide, su un
cilindro, su un cono.
Curve geodetiche su una griglia. Percorso ottimale di un SMS o di un
messaggio e-mail.

P. Brandi - A. Salvadori, Matematica&Realtà 5
Introduzione
1. Sistema di posizionamento satellitare
Nel depliant pubblicitario di un’auto berlina di recente produzione si legge:
Il sistema di navigazione satellitare adotta una grafica innovativa 3D per
mostrare strade e percorsi in maniera più chiara e definita; inoltre è previsto
un disco ausiliario che contiene le mappe di ben 10 paesi europei, con più di
500 punti di interesse e tutti i distributori di carburante dislocati sul
territorio.
Si tratta di una illustrazione dell’innovativo sistema di navigazione GPS (Global Positioning System) istallato sulla vettura.
Il GPS è un metodo di posizionamento basato sulla ricezione di segnali provenienti da
satelliti artificiali. Realizzato per esigenze militari dagli Stati Uniti d’America intorno agli
anni settanta, solo in un secondo momento è stato concesso per applicazioni di tipo civile1.
Una rete di satelliti artificiali - in rotazione attorno alla terra – emette segnali contenenti
una serie di dati che acquisisti ed opportunamente elaborati da uno strumento ricevente
permettono il posizionamento del ricevente in un riferimento cartesiano ortogonale
geocentrico 3D oppure in coordinate geografiche (latitudine, longitudine, altitudine sul
livello del mare).
1 Un analogo sistema - il GLONASS (GLObalnaya NAviagatsinnaya Sputnikovaya Sistema - è stato
realizzato dalla Unione Sovietica negli stessi anni.
Sistema di posizionamento e navigazione satellitare 6
Utilizzi civili del GPS
Il sistema GPS consente vari utilizzi civili fra i quali:
1. navigazione in terra, mare e cielo
2. monitoraggio delle deformazioni della crosta terrestre
3. rilievi topografici anche di alta precisione
4. rilievi cinematici (posizione e velocità) di alta precisione
5. tele-sorveglianza a scopo antifurto
Posizionamento assoluto
I dati acquisiti dal ricevitore vengono elaborati in modo autonomo per
determinare la posizione del ricevitore stesso.
Il metodo può essere applicato in tempo reale e consente una precisione
di qualche decimetro per i ricevitori militari e di 10-12 metri per quelli
disponibili in commercio per l’utenza civile.
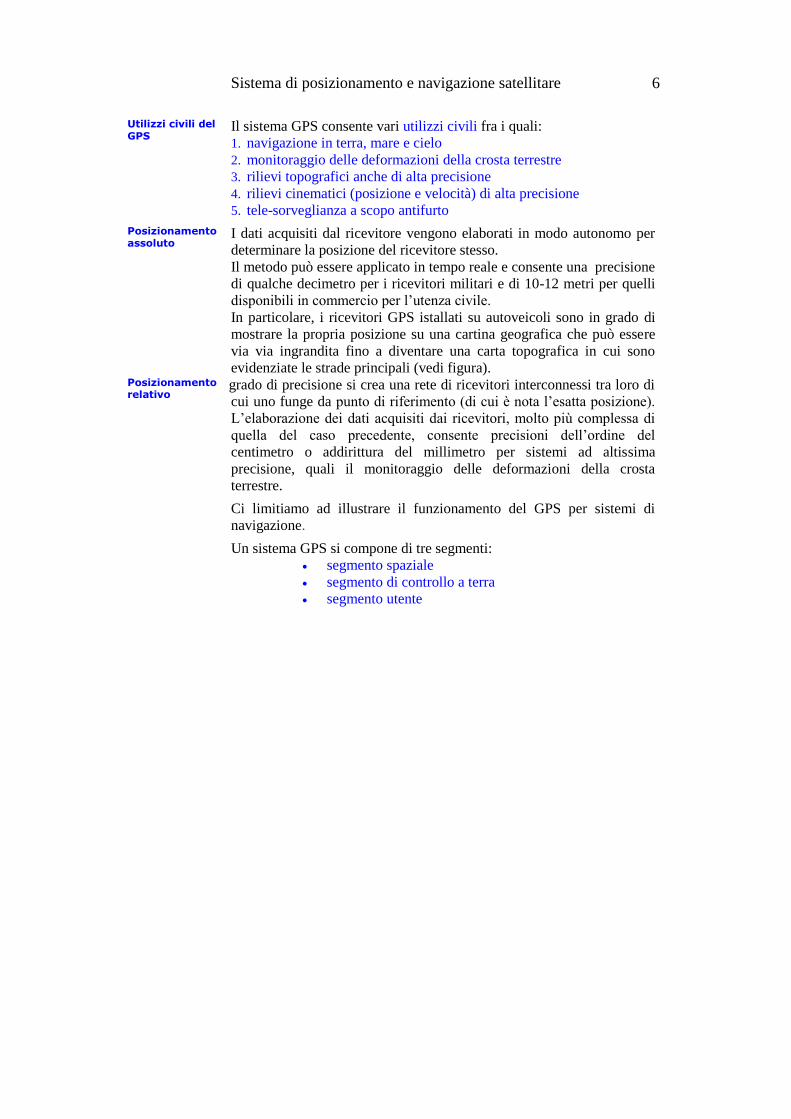
In particolare, i ricevitori GPS istallati su autoveicoli sono in grado di
mostrare la propria posizione su una cartina geografica che può essere
via via ingrandita fino a diventare una carta topografica in cui sono
evidenziate le strade principali (vedi figura). Posizionamento relativo Per aumentare il grado di precisione si crea una rete di ricevitori interconnessi tra loro di
cui uno funge da punto di riferimento (di cui è nota l’esatta posizione).
L’elaborazione dei dati acquisiti dai ricevitori, molto più complessa di
quella del caso precedente, consente precisioni dell’ordine del
centimetro o addirittura del millimetro per sistemi ad altissima
precisione, quali il monitoraggio delle deformazioni della crosta
terrestre.
Ci limitiamo ad illustrare il funzionamento del GPS per sistemi di
navigazione.
Un sistema GPS si compone di tre segmenti:
segmento spaziale
segmento di controllo a terra
segmento utente
segmento utente
P. Brandi - A. Salvadori, Matematica&Realtà 7
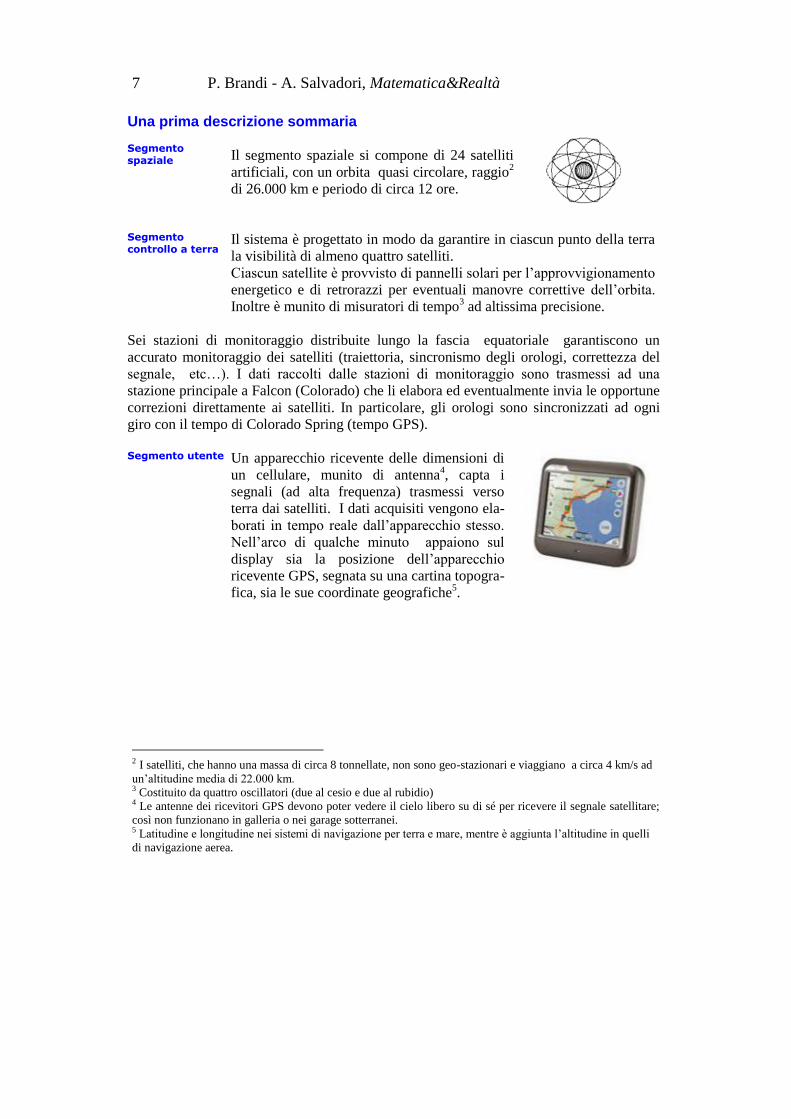
Una prima descrizione sommaria Segmento spaziale
Il segmento spaziale si compone di 24 satelliti
artificiali, con un orbita quasi circolare, raggio2
di 26.000 km e periodo di circa 12 ore.
Segmento controllo a terra
Il sistema è progettato in modo da garantire in ciascun punto della terra
la visibilità di almeno quattro satelliti.
Ciascun satellite è provvisto di pannelli solari per l’approvvigionamento
energetico e di retrorazzi per eventuali manovre correttive dell’orbita.
Inoltre è munito di misuratori di tempo3 ad altissima precisione.
Sei stazioni di monitoraggio distribuite lungo la fascia equatoriale garantiscono un
accurato monitoraggio dei satelliti (traiettoria, sincronismo degli orologi, correttezza del
segnale, etc…). I dati raccolti dalle stazioni di monitoraggio sono trasmessi ad una
stazione principale a Falcon (Colorado) che li elabora ed eventualmente invia le opportune
correzioni direttamente ai satelliti. In particolare, gli orologi sono sincronizzati ad ogni
giro con il tempo di Colorado Spring (tempo GPS).
Segmento utente Un apparecchio ricevente delle dimensioni di
un cellulare, munito di antenna4, capta i
segnali (ad alta frequenza) trasmessi verso
terra dai satelliti. I dati acquisiti vengono ela-
borati in tempo reale dall’apparecchio stesso.
Nell’arco di qualche minuto appaiono sul
display sia la posizione dell’apparecchio
ricevente GPS, segnata su una cartina topogra-
fica, sia le sue coordinate geografiche5.
2 I satelliti, che hanno una massa di circa 8 tonnellate, non sono geo-stazionari e viaggiano a circa 4 km/s ad
un’altitudine media di 22.000 km. 3 Costituito da quattro oscillatori (due al cesio e due al rubidio) 4 Le antenne dei ricevitori GPS devono poter vedere il cielo libero su di sé per ricevere il segnale satellitare;
così non funzionano in galleria o nei garage sotterranei. 5 Latitudine e longitudine nei sistemi di navigazione per terra e mare, mentre è aggiunta l’altitudine in quelli
di navigazione aerea.

Sistema di posizionamento e navigazione satellitare 8
2. Indirizzi e coordinate di riferimento
Quotidianamente facciamo uso di diversi indirizzari e sistemi di riferimento quali elenco
telefonico, carte stradali e geografiche, mappe topografiche, GPS (global positioning
system).
Il sistema di riferimento cartesiano è un modello generale ed astratto che unifica varie
strutture di indirizzo e posizionamento. Ne proponiamo una introduzione nell’ottica del
nostro percorso.
2.1 Coordinate di riferimento - Caso uni-dimensionale Coppia di riferimento
Due punti (distinti) A, B di una retta individuano un sistema di
riferimento cartesiano sulla retta stessa.
Assunto infatti un punto (per esempio, A) come origine O del sistema e
scelto il segmento AB come unità di misura, resta univocamente
individuato un orientamento, o verso di percorrenza, della retta .
Corrispondenza biunivoca
A ogni punto P della retta si associa un numero reale x, detto ascissa del
punto P, ottenuto come misura del segmento orientato OP rispetto
all’unità di misura OU (ove si è posto U = B):
OP
OUx
Tale corrispondenza (tra i punti della retta e i numeri reali) è biunivoca.
Riferimento cartesiano
In seguito indicheremo con OxU un sistema di riferimento cartesiano di
ascissa x e unità di misura OU su una retta.
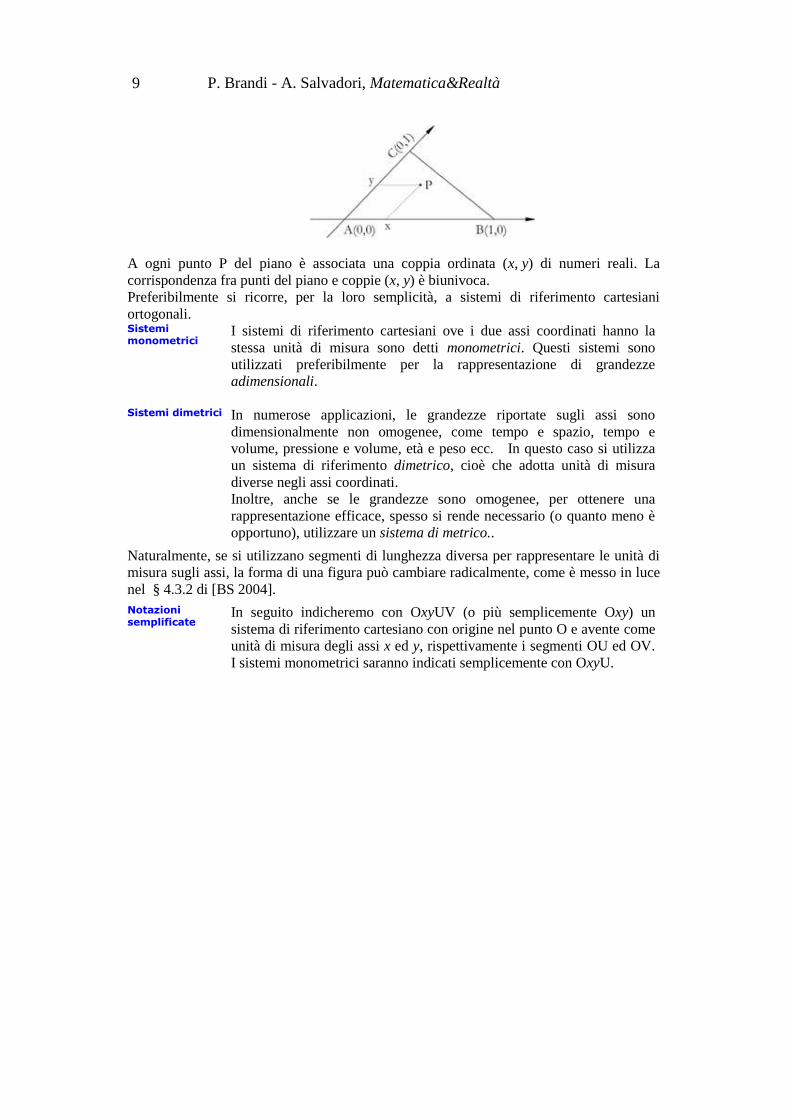
2.2 Coordinate di riferimento - Caso bi-dimensionale Terna o triangolo di riferimento
Un triangolo ABC (non degenere) individua un sistema di riferimento
cartesiano nel piano.
Assunto infatti un vertice (per esempio, A) come origine del sistema, e
scelti gli altri due (B e C) come punti unità degli assi, restano
individuati l’origine del sistema di riferimento, l’asse delle ascisse
(AB), l’asse delle ordinate (AC) e il loro orientamento.
1 0 x
P
P. Brandi - A. Salvadori, Matematica&Realtà 9
A ogni punto P del piano è associata una coppia ordinata (x, y) di numeri reali. La
corrispondenza fra punti del piano e coppie (x, y) è biunivoca.
Preferibilmente si ricorre, per la loro semplicità, a sistemi di riferimento cartesiani
ortogonali. Sistemi monometrici
I sistemi di riferimento cartesiani ove i due assi coordinati hanno la
stessa unità di misura sono detti monometrici. Questi sistemi sono
utilizzati preferibilmente per la rappresentazione di grandezze
adimensionali.
Sistemi dimetrici In numerose applicazioni, le grandezze riportate sugli assi sono
dimensionalmente non omogenee, come tempo e spazio, tempo e
volume, pressione e volume, età e peso ecc. In questo caso si utilizza
un sistema di riferimento dimetrico, cioè che adotta unità di misura
diverse negli assi coordinati.
Inoltre, anche se le grandezze sono omogenee, per ottenere una
rappresentazione efficace, spesso si rende necessario (o quanto meno è
opportuno), utilizzare un sistema di metrico..
Naturalmente, se si utilizzano segmenti di lunghezza diversa per rappresentare le unità di
misura sugli assi, la forma di una figura può cambiare radicalmente, come è messo in luce
nel § 4.3.2 di [BS 2004].
Notazioni semplificate
In seguito indicheremo con OxyUV (o più semplicemente Oxy) un
sistema di riferimento cartesiano con origine nel punto O e avente come
unità di misura degli assi x ed y, rispettivamente i segmenti OU ed OV.
I sistemi monometrici saranno indicati semplicemente con OxyU.
Sistema di posizionamento e navigazione satellitare 10
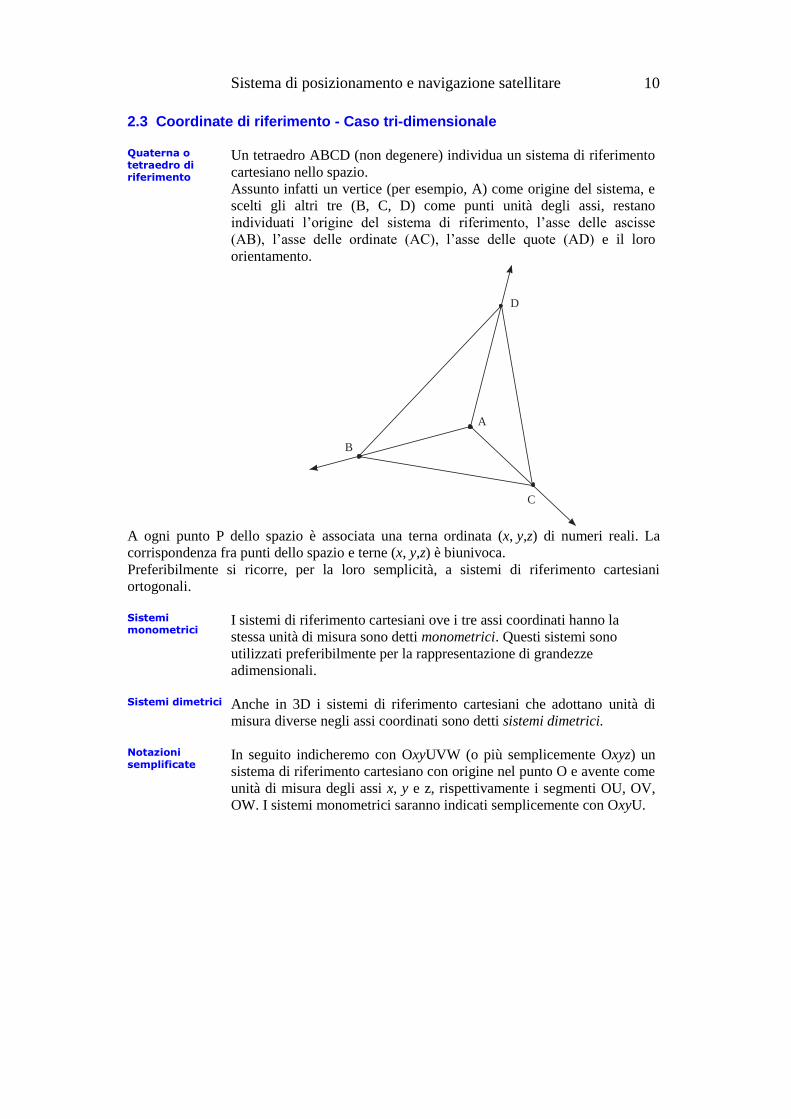
2.3 Coordinate di riferimento - Caso tri-dimensionale Quaterna o tetraedro di riferimento
Un tetraedro ABCD (non degenere) individua un sistema di riferimento
cartesiano nello spazio.
Assunto infatti un vertice (per esempio, A) come origine del sistema, e
scelti gli altri tre (B, C, D) come punti unità degli assi, restano
individuati l’origine del sistema di riferimento, l’asse delle ascisse
(AB), l’asse delle ordinate (AC), l’asse delle quote (AD) e il loro
orientamento.
B
A
C
D
A ogni punto P dello spazio è associata una terna ordinata (x, y,z) di numeri reali. La
corrispondenza fra punti dello spazio e terne (x, y,z) è biunivoca.
Preferibilmente si ricorre, per la loro semplicità, a sistemi di riferimento cartesiani
ortogonali.
Sistemi monometrici
I sistemi di riferimento cartesiani ove i tre assi coordinati hanno la
stessa unità di misura sono detti monometrici. Questi sistemi sono
utilizzati preferibilmente per la rappresentazione di grandezze
adimensionali.
Sistemi dimetrici Anche in 3D i sistemi di riferimento cartesiani che adottano unità di
misura diverse negli assi coordinati sono detti sistemi dimetrici.
Notazioni semplificate
In seguito indicheremo con OxyUVW (o più semplicemente Oxyz) un
sistema di riferimento cartesiano con origine nel punto O e avente come
unità di misura degli assi x, y e z, rispettivamente i segmenti OU, OV,
OW. I sistemi monometrici saranno indicati semplicemente con OxyU.

P. Brandi - A. Salvadori, Matematica&Realtà 11
2.4 Trasformazione di Coordinate Coordinate polari nel piano
Assegnato un sistema cartesiano ortogonale Oxy nel piano, un punto
),( yxP può essere individuato anche assegnando le coordinate
polari ),( ove
22 yx
rappresenta la distanza del punto P dall’origine e è l’angolo
formato tra il segmento OP e il semiasse positivo delle ascisse (cfr.
figura). Se P coincide con l’origine assumeremo l’angolo =0.
x
y
o
P
Da coordinate polari a coordinate cartesiane
L’equazione della trasformazione da coordinate polari a coordinate
cartesiane è dunque
sin
cos
y
x
ove R [,,0[
2.4.1 Approfondimento Scrivere l’equazione della trasformazione inversa, da coordinate cartesiane a coordinate polari.
2.4.2 Approfondimento Scrivere l’equazione in coordinate polari di una circonferenza con centro nell’origine.
2.4.3 Approfondimento Scrivere l’equazione di un segmento AB giacente sugli assi coordinati.

Sistema di posizionamento e navigazione satellitare 12
2.5 Coordinate cilindriche
Coordinate cilindriche nello spazio
Per rappresentare insiemi che abbiano qualche simmetria rispetto
all’asse z sono utili le coordinate cilindriche ( , , )t ove
cos
sin
x
y
z t
ove
[0, [ 0,2 t R
x
y
z
t
P

P. Brandi - A. Salvadori, Matematica&Realtà 13
2.6 Coordinate sferiche o coordinate polari nello spazio
Coordinate polari nello spazio
Assegnato un sistema cartesiano ortogonale Oxyz nello spazio, un punto
),,( zyxP può essere individuato anche assegnando le coordinate
polari ),,( ove
è detto raggio vettore (distanza PO)
è detta distanza zenitale o co-latitudine
(angolo formato da PO con l'asse z, dove O è l'origine degli assi)
si chiama azimut o longitudine
(angolo formato da OH con l'asse x dove H è la proiezione
ortogonale del punto P sul piano xy)
Da coordinate polari a coordinate cartesiane
L’equazione della trasformazione da
coordinate polari a coordinate cartesiane è
dunque
(2.6.1)
sin cos
sin cos
sin
x
y
z
ove
[0, [ [0,2 ] [0, ]
2.6.1 Approfondimento Scrivere l’equazione di una circonferenza con centro nell’origine e giacente su un piano parallelo al piano xy. 2.6.2 Approfondimento
Scrivere l’equazione di una sfera con centro nell’origine.
Sistema di posizionamento e navigazione satellitare 14
2.7 Coordinate geografiche, latitudine e longitudine
Si suppone che la superficie terrestre sia, in prima approssimazione, di forma sferica
( =costante).
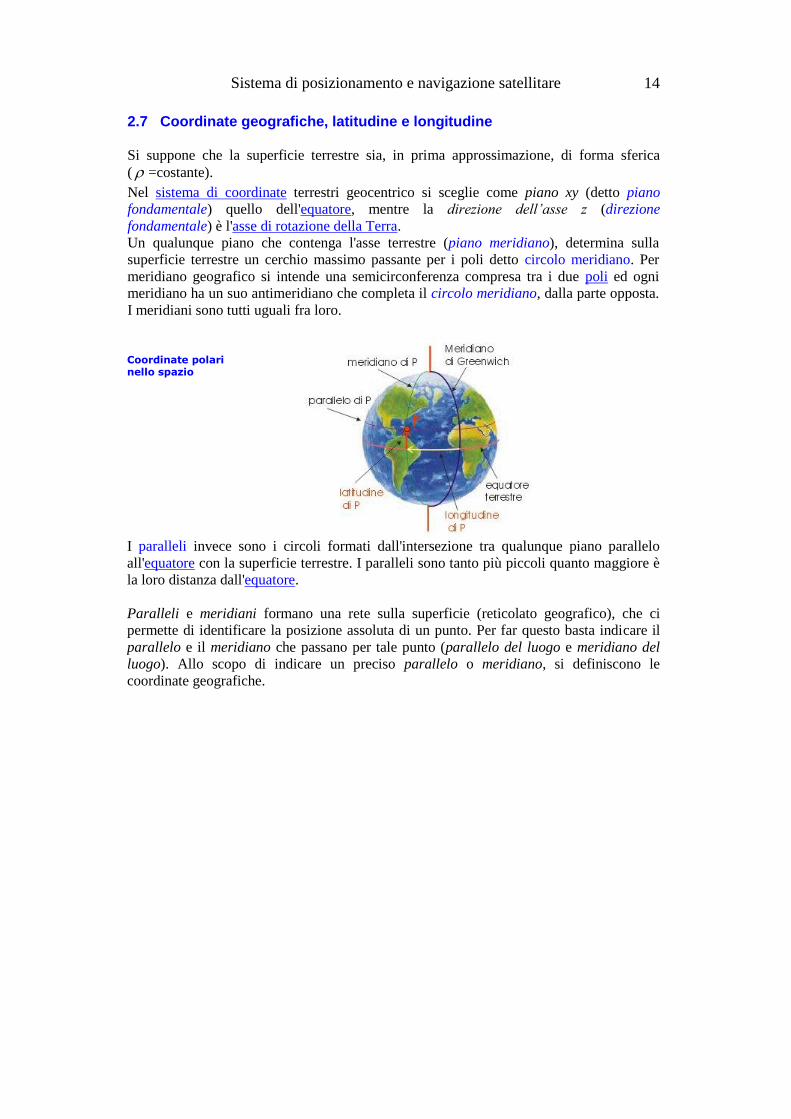
Nel sistema di coordinate terrestri geocentrico si sceglie come piano xy (detto piano
fondamentale) quello dell'equatore, mentre la direzione dell’asse z (direzione
fondamentale) è l'asse di rotazione della Terra.
Un qualunque piano che contenga l'asse terrestre (piano meridiano), determina sulla
superficie terrestre un cerchio massimo passante per i poli detto circolo meridiano. Per
meridiano geografico si intende una semicirconferenza compresa tra i due poli ed ogni
meridiano ha un suo antimeridiano che completa il circolo meridiano, dalla parte opposta.
I meridiani sono tutti uguali fra loro.
Coordinate polari nello spazio
I paralleli invece sono i circoli formati dall'intersezione tra qualunque piano parallelo
all'equatore con la superficie terrestre. I paralleli sono tanto più piccoli quanto maggiore è
la loro distanza dall'equatore.
Paralleli e meridiani formano una rete sulla superficie (reticolato geografico), che ci
permette di identificare la posizione assoluta di un punto. Per far questo basta indicare il
parallelo e il meridiano che passano per tale punto (parallelo del luogo e meridiano del
luogo). Allo scopo di indicare un preciso parallelo o meridiano, si definiscono le
coordinate geografiche.
P. Brandi - A. Salvadori, Matematica&Realtà 15
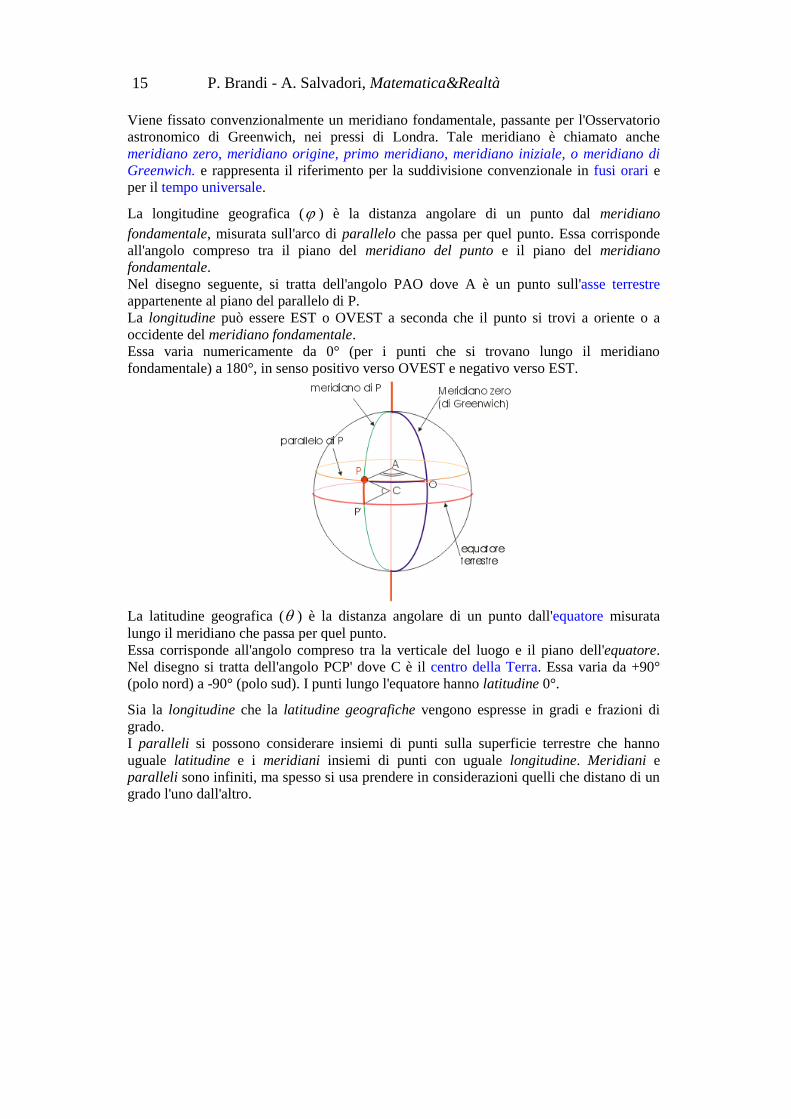
Viene fissato convenzionalmente un meridiano fondamentale, passante per l'Osservatorio
astronomico di Greenwich, nei pressi di Londra. Tale meridiano è chiamato anche
meridiano zero, meridiano origine, primo meridiano, meridiano iniziale, o meridiano di
Greenwich. e rappresenta il riferimento per la suddivisione convenzionale in fusi orari e
per il tempo universale.
La longitudine geografica ( ) è la distanza angolare di un punto dal meridiano
fondamentale, misurata sull'arco di parallelo che passa per quel punto. Essa corrisponde
all'angolo compreso tra il piano del meridiano del punto e il piano del meridiano
fondamentale.
Nel disegno seguente, si tratta dell'angolo PAO dove A è un punto sull'asse terrestre
appartenente al piano del parallelo di P.
La longitudine può essere EST o OVEST a seconda che il punto si trovi a oriente o a
occidente del meridiano fondamentale.
Essa varia numericamente da 0° (per i punti che si trovano lungo il meridiano
fondamentale) a 180°, in senso positivo verso OVEST e negativo verso EST.
La latitudine geografica ( ) è la distanza angolare di un punto dall'equatore misurata
lungo il meridiano che passa per quel punto.
Essa corrisponde all'angolo compreso tra la verticale del luogo e il piano dell'equatore.
Nel disegno si tratta dell'angolo PCP' dove C è il centro della Terra. Essa varia da +90°
(polo nord) a -90° (polo sud). I punti lungo l'equatore hanno latitudine 0°.
Sia la longitudine che la latitudine geografiche vengono espresse in gradi e frazioni di
grado.
I paralleli si possono considerare insiemi di punti sulla superficie terrestre che hanno
uguale latitudine e i meridiani insiemi di punti con uguale longitudine. Meridiani e
paralleli sono infiniti, ma spesso si usa prendere in considerazioni quelli che distano di un
grado l'uno dall'altro.

Sistema di posizionamento e navigazione satellitare 16
Essi sono detti meridiani di grado e paralleli di grado. Esistono 360 meridiani di grado e
178 paralleli di grado (escludendo i due paralleli ai poli, che sono ridotti ad un punto).
La parola meridiano deriva dal latino meridies, perché un meridiano unisce tutti i punti
che hanno il mezzogiorno nello stesso momento.
Dati terrestri
Raggio Equatoriale 6378,1 km
2.7.1 Approfondimento Determinare
1) la lunghezza di un meridiano 2) la distanza all’equatore fra due meridiani 3) la distanza sulla superficie terreste fra il 42° e il 43° parallelo 4) un procedimento per tracciare i paralleli su un mappamondo 5) le distanze fra i piani che individuano i paralleli 6) le coordinate geografiche del Liceo da Procida di Salerno
7) a latitudine zero (all’equatore) quanto distano due punti che differiscono di un grado di longitudine oppure di un primo di grado Suggerimento: essendo nota la lunghezza della circonferenza equatoriale (il raggio della terra è ripor-ato in questa dispensa) con un semplice proporzione si calcola la lunghezza dell’arco corrispondente ad un grado, ad un primo di grado o a qualunque angolo al centro]
L'angolo λ della latitudine
8) a latitudine quanto distano due punti che differiscono di un grado di longitudine
oppure di un primo di grado
P. Brandi - A. Salvadori, Matematica&Realtà 17
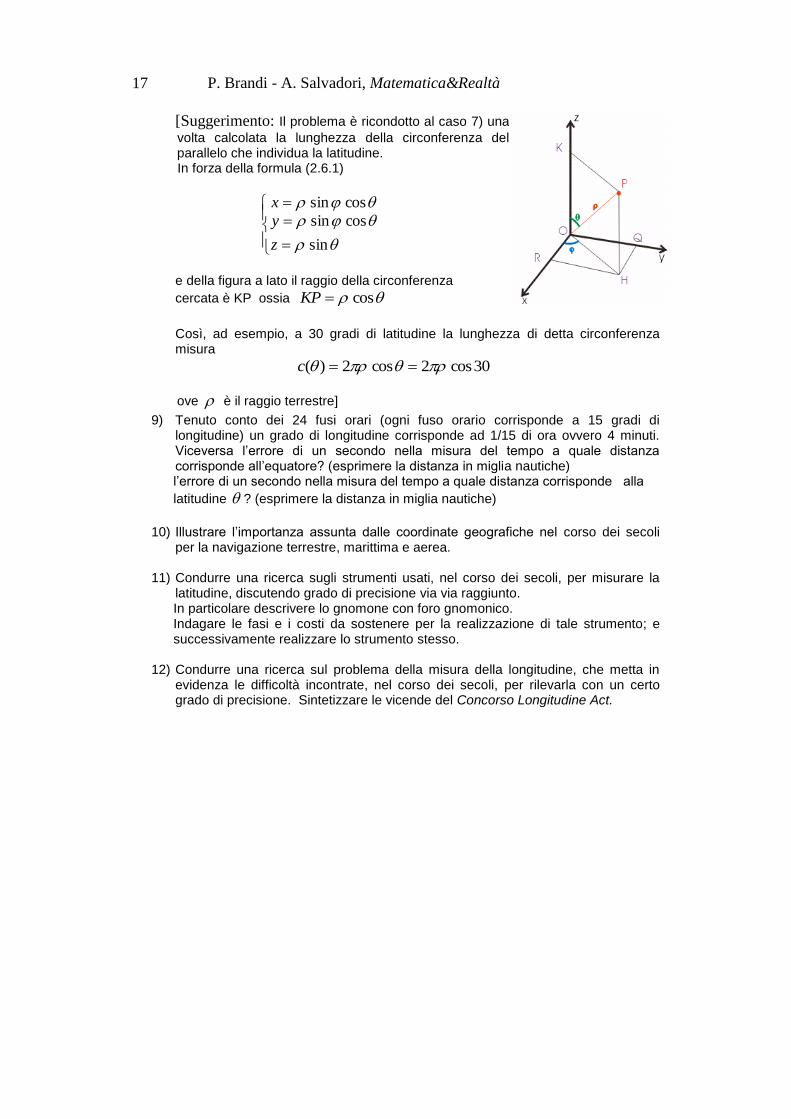
[Suggerimento: Il problema è ricondotto al caso 7) una
volta calcolata la lunghezza della circonferenza del parallelo che individua la latitudine. In forza della formula (2.6.1)
sin
cossin
cossin
z
y
x
e della figura a lato il raggio della circonferenza
cercata è KP ossia cosKP
Così, ad esempio, a 30 gradi di latitudine la lunghezza di detta circonferenza misura
30cos2cos2)( c
ove è il raggio terrestre]
9) Tenuto conto dei 24 fusi orari (ogni fuso orario corrisponde a 15 gradi di longitudine) un grado di longitudine corrisponde ad 1/15 di ora ovvero 4 minuti. Viceversa l’errore di un secondo nella misura del tempo a quale distanza corrisponde all’equatore? (esprimere la distanza in miglia nautiche)
l’errore di un secondo nella misura del tempo a quale distanza corrisponde alla
latitudine ? (esprimere la distanza in miglia nautiche)
10) Illustrare l’importanza assunta dalle coordinate geografiche nel corso dei secoli per la navigazione terrestre, marittima e aerea.
11) Condurre una ricerca sugli strumenti usati, nel corso dei secoli, per misurare la
latitudine, discutendo grado di precisione via via raggiunto. In particolare descrivere lo gnomone con foro gnomonico. Indagare le fasi e i costi da sostenere per la realizzazione di tale strumento; e successivamente realizzare lo strumento stesso. 12) Condurre una ricerca sul problema della misura della longitudine, che metta in
evidenza le difficoltà incontrate, nel corso dei secoli, per rilevarla con un certo grado di precisione. Sintetizzare le vicende del Concorso Longitudine Act.

Sistema di posizionamento e navigazione satellitare 18
2.8 Localizzazione di un punto attraverso punti noti
Problema del topografo. Il geometra Renato Bianchi è stato interpellato dal Signor
Paolo Rossi per apporre i termini di confine su alcuni terreni di sua proprietà.
Una mattina il tecnico, munito di una mappa catastale della zona, si reca sul posto per un
sopraluogo. Sulla mappa sono segnati alcuni punti di riferimento (di coordinate note),
facilmente visibili. Questi punti (indicati con S) sono spesso dislocati in cima ai campanili
o alle montagne oppure nella parte terminale di antenne, etc.
Mediante un telemetro professionale, il geometra può misurare la distanza fra la propria
posizione R e i vari punti S di riferimento (visibili) della mappa.
Per localizzare i confini del terreno, Bianchi misura con l’aiuto dello strumento le inter-
distanze fra la propria posizione e i punti S, ripetendo le misure da diverse posizioni.
[Per una maggiore affidabilità, mediante un teodolite (strumento di misura di angoli)
esegue anche alcune triangolazioni].
Una volta acquisiti il set di dati, dopo una breve elaborazione il tecnico è in grado di
allocare i termini di confine segnati sulla mappa.
Il seguente quesito è connesso al problema del topografo.
Quesito (2.8.1): Qual è il numero minimo di punti di riferimento necessari per
localizzare sulla mappa la propria posizione ovvero per determinare le coordinate
cartesiane del punto R ?
Rispondiamo per gradi.
a) Caso uni-dimensionale
Sia OxU un sistema di riferimento sulla retta. Indichiamo con 1S un punto di riferimento
sulla retta la cui coordinata 1x sia nota.
Consideriamo un osservatore posizionato in un punto R di ascissa x. Misurando la
distanza 1d fra i punti R e 1S , si perviene all’equazione
1 1| |x x d
o equivalentemente
(2.8.1) 2 2
1 1( )x x d
L’equazione (2.8.1) individua il luogo dei punti della retta a distanza 1d dal punto 1S
ovvero la circonferenza di centro 1S e raggio 1d . Tale luogo è costituito da due soli punti,
precisamente
1 1x x d

P. Brandi - A. Salvadori, Matematica&Realtà 19
b) Caso bi-dimensionale Sia OxyU un sistema di riferimento cartesiano ortogonale monometrico nel piano.
Indichiamo con 1 1 1( , )S x y un punto di riferimento nel piano le cui coordinate siano
note. Consideriamo un osservatore posizionato in un punto R=(x,y). Misurando la
distanza 1d fra i punti R e 1S , si perviene all’equazione
ovvero il punto incognito R appartiene alla circonferenza di centro 1S e raggio 1d .
Ovviamente sono infinite le possibili scelte di coordinate del punto R.
Introduciamo un altro punto di riferimento che indichiamo con 2 2 2( , ).S x y
Misurando la distanza 2d fra i punti R e 2S , si perviene alla ulteriore equazione
2 2 2
2 2 2( ) ( )x x y y d
ovvero il punto incognito R deve appartenere anche alla circonferenza di centro 2S e
raggio 2d .
In conclusione per determinare la posizione dell’osservatore dobbiamo discutere il
sistema
(2.8.2)
2 2 2
1 1 1
2 2 2
2 2 2
( ) ( )
( ) ( )
x x y y d
x x y y d
Le soluzioni (reali) del sistema sono le coordinate ( , )x y
dei punti di intersezione delle due circonferenze. Indicata
con d la distanza 1 2S S , il sistema ammette soluzioni se e
solo se
1 2... d d d
Riportiamo le due soluzioni generali del sistema (2.8.2), calcolate con l’aiuto di un
CAS.
x 1/(2 x1-2 x2)(-d12+d2
2+x1
2-y2
2+(4 d1
2 x2
2)/(4 x1
2-8 x1 x2+8
x22-8 x2 y2+4 y2
2)-(4 d2
2 x2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4
y22)-(4 x1
2 x2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)+(8 x1
x23)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)-(8 x2
4)/(4 x1
2-8 x1
x2+8 x22-8 x2 y2+4 y2
2)-(8 d1
2 x2 y2)/(4 x1
2-8 x1 x2+8 x2
2-8
x2 y2+4 y22)+(8 d2
2 x2 y2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4
y22)+(8 x2
3 y2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)+(4 d1
2
y22)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)-(4 d2
2 y2
2)/(4 x1
2-8
x1 x2+8 x22-8 x2 y2+4 y2
2)+(4 x1
2 y2
2)/(4 x1
2-8 x1 x2+8 x2
2-8
x2 y2+4 y22)-(8 x1 x2 y2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4
y22)+(4 x2
2 y2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)-(8 x2
SS
R
12
dd1
2
Sistema di posizionamento e navigazione satellitare 20
y23)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)+(4 y2
4)/(4 x1
2-8 x1
x2+8 x22-8 x2 y2+4 y2
2)+(x2 \[Sqrt]((4 d1^2 x2-4 d2^2 x2-4
x1^2 x2+8 x1 x2^2-8 x2^3-4 d1^2 y2+4 d2^2 y2-4 x1^2 y2+8 x1
x2 y2+4 x2 y2^2-4 y2^3)2-4 (4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4
y22) (d1
4-2 d1
2 d2
2+d2
4-2 d1
2 x1
2-2 d2
2 x1
2+x1
4+4 d1
2 x1 x2+4
d22 x1 x2-4 x1
3 x2-4 d1
2 x2
2+8 x1
2 x2
2-8 x1 x2
3+4 x2
4+2 d1
2
y22-2 d2
2 y2
2+2 x1
2 y2
2-4 x1 x2 y2
2+y2
4)))/(4 x1
2-8 x1 x2+8
x22-8 x2 y2+4 y2
2)-(y2 \[Sqrt]((4 d1^2 x2-4 d2^2 x2-4 x1^2
x2+8 x1 x2^2-8 x2^3-4 d1^2 y2+4 d2^2 y2-4 x1^2 y2+8 x1 x2
y2+4 x2 y2^2-4 y2^3)2-4 (4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)
(d14-2 d1
2 d2
2+d2
4-2 d1
2 x1
2-2 d2
2 x1
2+x1
4+4 d1
2 x1 x2+4 d2
2 x1
x2-4 x13 x2-4 d1
2 x2
2+8 x1
2 x2
2-8 x1 x2
3+4 x2
4+2 d1
2 y2
2-2 d2
2
y22+2 x1
2 y2
2-4 x1 x2 y2
2+y2
4)))/(4 x1
2-8 x1 x2+8 x2
2-8 x2
y2+4 y22))
y (-4 d12 x2+4 d2
2 x2+4 x1
2 x2-8 x1 x2
2+8 x2
3+4 d1
2 y2-4 d2
2
y2+4 x12 y2-8 x1 x2 y2-4 x2 y2
2+4 y2
3-\[Sqrt]((4 d1^2 x2-4
d2^2 x2-4 x1^2 x2+8 x1 x2^2-8 x2^3-4 d1^2 y2+4 d2^2 y2-4
x1^2 y2+8 x1 x2 y2+4 x2 y2^2-4 y2^3)2-4 (4 x1
2-8 x1 x2+8 x2
2-
8 x2 y2+4 y22) (d1
4-2 d1
2 d2
2+d2
4-2 d1
2 x1
2-2 d2
2 x1
2+x1
4+4 d1
2
x1 x2+4 d22 x1 x2-4 x1
3 x2-4 d1
2 x2
2+8 x1
2 x2
2-8 x1 x2
3+4 x2
4+2
d12 y2
2-2 d2
2 y2
2+2 x1
2 y2
2-4 x1 x2 y2
2+y2
4)))/(2 (4 x1
2-8 x1
x2+8 x22-8 x2 y2+4 y2
2))}
x 1/(2 x1-2 x2)(-d12+d2
2+x1
2-y2
2+(4 d1
2 x2
2)/(4 x1
2-8 x1
x2+8 x22-8 x2 y2+4 y2
2)-(4 d2
2 x2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2
y2+4 y22)-(4 x1
2 x2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)+(8
x1 x23)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)-(8 x2
4)/(4 x1
2-8
x1 x2+8 x22-8 x2 y2+4 y2
2)-(8 d1
2 x2 y2)/(4 x1
2-8 x1 x2+8
x22-8 x2 y2+4 y2
2)+(8 d2
2 x2 y2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2
y2+4 y22)+(8 x2
3 y2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)+(4
d12 y2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)-(4 d2
2 y2
2)/(4
x12-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)+(4 x1
2 y2
2)/(4 x1
2-8 x1 x2+8
x22-8 x2 y2+4 y2
2)-(8 x1 x2 y2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2
y2+4 y22)+(4 x2
2 y2
2)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)-(8
x2 y23)/(4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)+(4 y2
4)/(4 x1
2-8
x1 x2+8 x22-8 x2 y2+4 y2
2)-(x2 \[Sqrt]((4 d1^2 x2-4 d2^2 x2-
4 x1^2 x2+8 x1 x2^2-8 x2^3-4 d1^2 y2+4 d2^2 y2-4 x1^2 y2+8
x1 x2 y2+4 x2 y2^2-4 y2^3)2-4 (4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4
y22) (d1
4-2 d1
2 d2
2+d2
4-2 d1
2 x1
2-2 d2
2 x1
2+x1
4+4 d1
2 x1 x2+4
d22 x1 x2-4 x1
3 x2-4 d1
2 x2
2+8 x1
2 x2
2-8 x1 x2
3+4 x2
4+2 d1
2
y22-2 d2
2 y2
2+2 x1
2 y2
2-4 x1 x2 y2
2+y2
4)))/(4 x1
2-8 x1 x2+8
x22-8 x2 y2+4 y2
2)+(y2 \[Sqrt]((4 d1^2 x2-4 d2^2 x2-4 x1^2
x2+8 x1 x2^2-8 x2^3-4 d1^2 y2+4 d2^2 y2-4 x1^2 y2+8 x1 x2
P. Brandi - A. Salvadori, Matematica&Realtà 21
y2+4 x2 y2^2-4 y2^3)2-4 (4 x1
2-8 x1 x2+8 x2
2-8 x2 y2+4 y2
2)
(d14-2 d1
2 d2
2+d2
4-2 d1
2 x1
2-2 d2
2 x1
2+x1
4+4 d1
2 x1 x2+4 d2
2 x1
x2-4 x13 x2-4 d1
2 x2
2+8 x1
2 x2
2-8 x1 x2
3+4 x2
4+2 d1
2 y2
2-2 d2
2
y22+2 x1
2 y2
2-4 x1 x2 y2
2+y2
4)))/(4 x1
2-8 x1 x2+8 x2
2-8 x2
y2+4 y22))
y (-4 d12 x2+4 d2
2 x2+4 x1
2 x2-8 x1 x2
2+8 x2
3+4 d1
2 y2-4 d2
2
y2+4 x12 y2-8 x1 x2 y2-4 x2 y2
2+4 y2
3+\[Sqrt]((4 d1^2 x2-4
d2^2 x2-4 x1^2 x2+8 x1 x2^2-8 x2^3-4 d1^2 y2+4 d2^2 y2-4
x1^2 y2+8 x1 x2 y2+4 x2 y2^2-4 y2^3)2-4 (4 x1
2-8 x1 x2+8 x2
2-
8 x2 y2+4 y22) (d1
4-2 d1
2 d2
2+d2
4-2 d1
2 x1
2-2 d2
2 x1
2+x1
4+4 d1
2
x1 x2+4 d22 x1 x2-4 x1
3 x2-4 d1
2 x2
2+8 x1
2 x2
2-8 x1 x2
3+4 x2
4+2
d12 y2
2-2 d2
2 y2
2+2 x1
2 y2
2-4 x1 x2 y2
2+y2
4)))/(2 (4 x1
2-8 x1
x2+8 x22-8 x2 y2+4 y2
2))}}
Naturalmente queste due espressioni non hanno alcun interesse pratico.
Possiamo agire su due fronti.
Una prima possibilità è quella di semplificare il sistema, operando scelte opportune del
sistema di riferimento; una seconda possibilità è il ricorso ad algoritmi che forniscono
soluzioni approssimate.
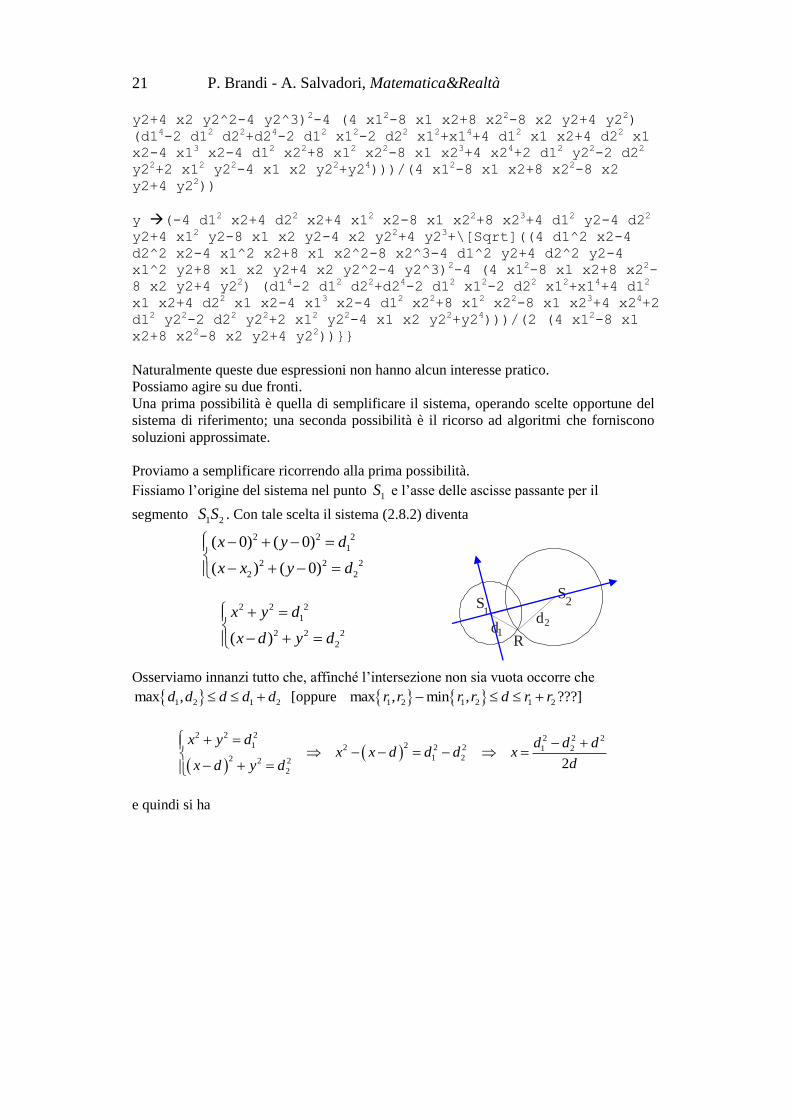
Proviamo a semplificare ricorrendo alla prima possibilità.
Fissiamo l’origine del sistema nel punto 1S e l’asse delle ascisse passante per il
segmento 1 2S S . Con tale scelta il sistema (2.8.2) diventa
2 2 2
1
2 2 2
2 2
( 0) ( 0)
( ) ( 0)
x y d
x x y d
2 2 2
1
2 2 2
2( )
x y d
x d y d
Osserviamo innanzi tutto che, affinché l’intersezione non sia vuota occorre che
1 2 1 2max ,d d d d d [oppure 1 2 1 2 1 2max , min ,r r r r d r r ???]
2 2 2 2 2 21 22 2 2 1 2
1 22 2 2
22
x y d d d dx x d d d x
dx d y d
e quindi si ha
SS
R
12
dd1
2

Sistema di posizionamento e navigazione satellitare 22
2 2 2
1 2
2 2 22 1 2
1
2
2
d d dx
d
d d dy d
d
Facendo ricorso ad un CAS, si ottiene la risposta seguente (ovviamente il risultato è
identico a quello “fatto a mano”):
{y-
d12
d2
d12
d22 2
4 d2,x(d2+d12-d22)/(2 d)},
{y
d12
d2
d12
d22 2
4 d2,x(d2+d12-d22)/(2 d)}}
c) Caso tri-dimensionale
Sia OxyzU un sistema di riferimento cartesiano ortogonale monometrico nello spazio. Indichiamo
con 1 1 1 1( , , )S x y z un punto di riferimento nel piano le cui coordinate siano note.
Consideriamo un osservatore posizionato in un punto R=(x,y,z). Misurando la distanza 1d fra i
punti R e 1S , si perviene all’equazione
2 2 2 2
1 1 1 1( ) ( ) ( )x x y y z z d
ovvero il punto incognito R appartiene alla sfera di centro 1S e raggio 1d .
Ovviamente sono infinite le possibili scelte di
coordinate del punto R.
Introduciamo un altro punto di riferimento che
indichiamo con 2 2 2( , ).S x y
Misurando la distanza 2d fra i punti R e 2S , si
perviene alla ulteriore equazione
2 2 2 2
2 2 2 2( ) ( ) ( )x x y y z z d
P. Brandi - A. Salvadori, Matematica&Realtà 23
ovvero il punto incognito R deve appartenere anche alla sfera di centro 2S e raggio
2d .
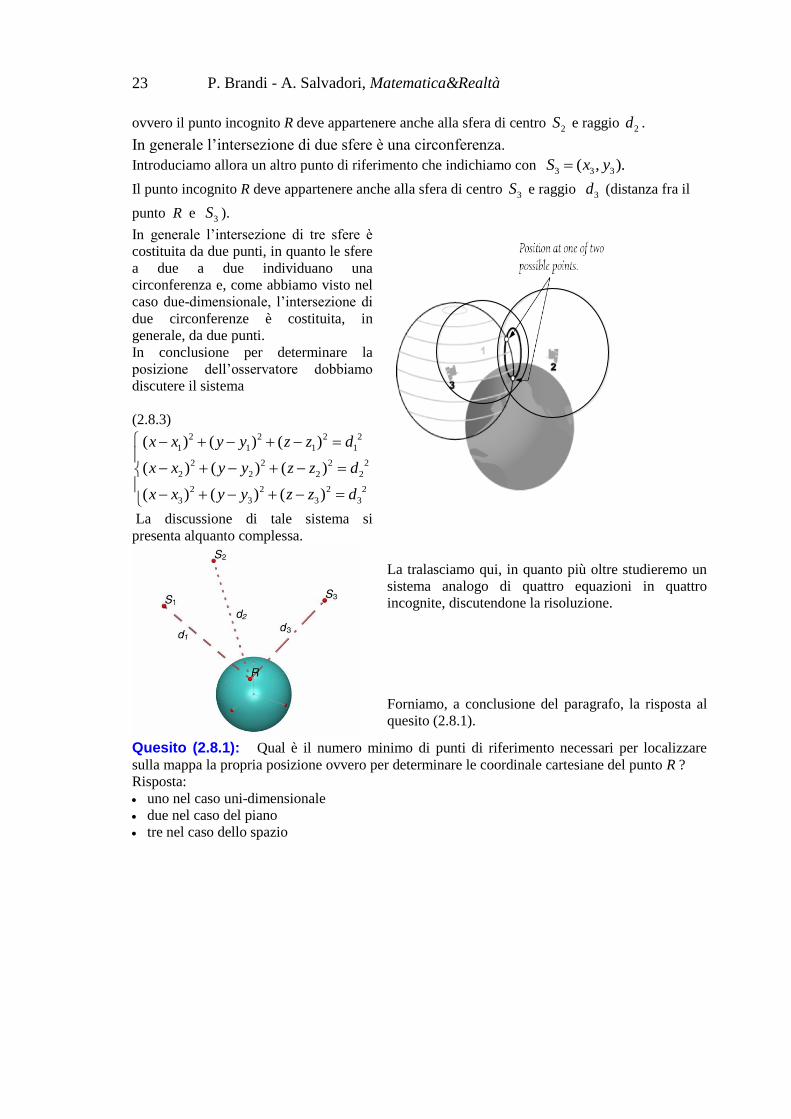
In generale l’intersezione di due sfere è una circonferenza.
Introduciamo allora un altro punto di riferimento che indichiamo con 3 3 3( , ).S x y
Il punto incognito R deve appartenere anche alla sfera di centro 3S e raggio
3d (distanza fra il
punto R e 3S ).
In generale l’intersezione di tre sfere è
costituita da due punti, in quanto le sfere
a due a due individuano una
circonferenza e, come abbiamo visto nel
caso due-dimensionale, l’intersezione di
due circonferenze è costituita, in
generale, da due punti.
In conclusione per determinare la
posizione dell’osservatore dobbiamo
discutere il sistema
(2.8.3) 2 2 2 2
1 1 1 1
2 2 2 2
2 2 2 2
2 2 2 2
3 3 3 3
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
x x y y z z d
x x y y z z d
x x y y z z d
La discussione di tale sistema si
presenta alquanto complessa.
La tralasciamo qui, in quanto più oltre studieremo un
sistema analogo di quattro equazioni in quattro
incognite, discutendone la risoluzione.
Forniamo, a conclusione del paragrafo, la risposta al
quesito (2.8.1).
Quesito (2.8.1): Qual è il numero minimo di punti di riferimento necessari per localizzare
sulla mappa la propria posizione ovvero per determinare le coordinale cartesiane del punto R ?
Risposta:
uno nel caso uni-dimensionale
due nel caso del piano
tre nel caso dello spazio
Sistema di posizionamento e navigazione satellitare 24
3. Il sistema di localizzazione GPS
3.1 Un primo modello teorico
Come abbiamo visto nel paragrafo 2.8, lettera c), la misura simultanea della distanza fra il
ricevitore e tre satelliti non allineati fornisce sufficienti informazioni per determinare la
posizione del ricevitore stesso.
La necessità di eseguire la misura delle distanze in modo simultaneo (in quanto i satelliti
non sono punti fissi, ma viaggiano a circa 4 km al secondo) impone un adeguamento del
modello.
Osserviamo innanzi tutto che le distanze ricevitore – satellite variano fra 22.000 e 25.000
km e devono essere stimate con un errore di qualche metro.
Naturalmente le misure non possono che essere indirette.
In astronomia le distanze sono misurate attraverso il tempo che la luce impiega a
coprirle6.
Supponiamo allora di utilizzare un segnale emesso da uno dei satelliti visibili dal
ricevitore per calcolare la distanza satellite-ricevitore.
Poiché il segnale viaggia alla velocità della luce (circa 300.000 km/s), la scala delle
distanze espresse in metri si ottiene semplicemente moltiplicando i valori sulla scala dei
tempi per il fattore7
93 10c .
Conoscendo l’ordine di grandezza delle distanze da misurare e la precisione delle misure
(inferiore a 10 m) possiamo determinare le grandezze corrispondenti sulla scala dei tempi.
Così il segnale8 impiega meno di un decimo di secondo a percorrere gli oltre 20.000 km
della distanza satellite – ricevitore, mentre un errore sulle distanze dell’ordine di 10 m
corrisponde sulla scala dei tempi a circa 8
3 10 30s ns (nanosecondi).
Alla semplicità del sistema (2.8.3), da cui ricavare le coordinate di R, si contrappongono
le difficoltà tecniche sulla scala dei tempi per apprezzare una unità di tempo così piccola
(il nanosecondo).
6 L’unità di misura è l’anno luce, cioè la distanza che la luce percorre in un anno, pari a
15
299792458 (m/s) 365,25 (giorni) 86400 (s/giorno)=9,461 10 (m)
poco meno di diecimila miliardi di chilometri. 7 Velocità della luce nel vuoto 299792458 (m/s)c . Il segnale in realtà viene perturbato dalla
ionosfera, come accenneremo più oltre.
8
3
5
spaziotempo=
velocità
20 10 7
3 10 100
1
10
< (in secondi).
P. Brandi - A. Salvadori, Matematica&Realtà 25
I progressi della tecnologia hanno superato queste difficoltà a partire dagli anni sessanta,
grazie agli orologi atomici.
3.2 Un modello “rettificato”
Gli orologi atomici al cesio apprezzano unità di tempo dell’ordine di 1210 s
, con
un’accuratezza di 2 ns nell’arco delle 24 h.
Supponiamo che un segnale ad alta frequenza venga emesso da un satellite visibile dal
ricevitore all’istante t0, tempo misurato sull’orologio del satellite. Il ricevitore registra
l’arrivo del segnale al tempo t1, misurato sul suo orologio. Se i due orologi fossero
sincronizzati, il tempo impiegato dal segnale a coprire la distanza satellite – ricevitore
sarebbe t1-t0.
Non è però realistico assumere che l’orologio del ricevitore GPS sia sincronizzato con
quello del satellite. Infatti quest’ultimo orologio è estremamente preciso, sincronizzato9
con il tempo USNO Master Clock (United States Naval Observatory) che viene
aggiornato ogni 100 s, mentre l’orologio del ricevitore è generalmente un normale
orologio al quarzo.
Di conseguenza la misura (sulla scala dei tempi) della distanza satellite – ricevitore è
affetta da un errore, detto offset dell’orologio del ricevitore10
.
Pertanto oltre alla coordinate x, y, z del ricevitore è incognito anche l’offset offt
dell’orologio del ricevente rispetto al tempo11
GPS.
Abbiamo così quattro incognite da determinare.
Il sistema (2.8.3) deve essere rettificato con l’introduzione di una incognita e completato
con l’aggiunta di una equazione ottenuta attraverso la distanza 4d del ricevitore da un
quarto satellite 4S .
9 Per semplicità si è assunto che gli orologi dei satelliti fossero sincronizzati fra loro. In realtà si assume come
riferimento il tempo GPS. L’off-set di ogni satellite è noto e viene trasmesso al ricevente attraverso il segnale
emesso dal satellite. 10
Tale distanza è perciò detta pseudo-distanza (pseudo range). 11
L’offset può essere una quantità sia positiva che negativa. Trascurando un offset di 1 ms
s’incorrerebbe in un errore di circa 300 km nella stima della posizione del ricevitore.

Sistema di posizionamento e navigazione satellitare 26
(3.2.1)
2 2 2
1 1 1 1
2 2 2
2 2 2 2
2 2 2
3 3 3 3
2 2 2
4 4 4 4
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
off
off
off
off
x x y y z z d c t
x x y y z z d c t
x x y y z z d c t
x x y y z z d c t
Tetraedri adiacenti formati da quattro satelliti e dal ricevitore
Le coordinate , ,i i ix y z di posizione del satellite iS e la distanza id del ricevitore dal
satellite iS sono termini noti in quanto acquisiti dal ricevitore attraverso il segnale emesso
dai satelliti.
Limitiamoci al caso piano ovvero eliminiamo la quota z. Cioè consideriamo solo la
navigazione terrestre o quella in mare.
Il sistema (3.2.1) si riduce a tre equazioni nelle tre incognite , , offx y t
22 2
1 1 1
22 2
2 2 2
22 2
3 3 3
off
off
off
x x y y d c t
x x y y d c t
x x y y d c t
Posto r c t abbiamo
2 2 2
1 1 1
2 2 2
2 2 2
2 2 2
3 3 3
x x y y r d
x x y y r d
x x y y r d
Sviluppando e confrontando la prima e la seconda equazione risulta
2 2 2 2 2 2
1 1 1 1 1 1
2 2 2 2 2 2
2 2 2 2 2 2
2 2 2 2 2 2
3 3 3 3 3 3
2 2 2 0
2 2 2 0
2 2 2 0
x x x x y y y y r d rd
x x x x y y y y r d rd
x x x x y y y y r d rd
2 2 2 2 2 2
1 2 2 1 1 2 2 1 1 2 2 12 2 2 0x x x x x y y y y y d d d d r
0Ax B y C r D

P. Brandi - A. Salvadori, Matematica&Realtà 27
ove si è posto
2 1 2 1 2 1
2 1
2 1
2 1
2 2 2 2 2 2
2( )
2( )
2( )
( ) ( ) ( )
A x x
B y y
C d d
D x x y y d d
Analogamente confrontando la prima e la terza equazione si deduce
2 2 2 2 2 2
1 3 3 1 1 3 3 1 1 3 3 12 2 2 0x x x x x y y y y y d d d d r
' ' ' ' 0A x B y C r D
ove si è posto
1 3 1 1
3 1
3 1
3 1
2 2 2 2 2 2
3 3
' 2( )
' 2( )
' 2( )
' ( ) ( ) ( )
A x x
B y y
C d d
D x x y y d d
Risolvendo in x, y
' ' ' '
Ax B y C r D
A x B y C r D
poiché ' '' '
A BAB A B
A B , si ha
' ' ' '' ' '
' ' ' '
' ' ' '' ' '
' ' ' '
Cr D B
r BC B C BD B DC r D Bx
AB A B AB A B
A Cr D
r A C AC A D ADA C r Dy
AB A B AB A B
da cui, posto
' '
' '
' '
' '
' '
E BC B C
F BD B D
G AB A B
H A C AC
I A D AD

Sistema di posizionamento e navigazione satellitare 28
segue
r E Fx
G
r H Iy
G
Sostituendo nella prima equazione i valori di x e y in funzione di r, si ottiene
2 2
2
1 1 1 0r E F r H I
x y d rG G
2 2 2 2 2
1 1 1
2 2 2 2 2 2 2 2
1 1 1 1 1
2
2 2 0
r E H G r EF EGx HI HGy G d
F x G FGx I G y IGy G d
Posto
2 2 2
2
1 1 1
2 2 2 2 2 2 2 2
1 1 1 1 12 2
L E H G
M EF EGx HI HGy G d
N F x G FGx I G y IGy G d
si ha 2 2 0Lr M r N
Assunto 2 0M LN , in definitiva risulta
2M M L Nr
L
r E Fx
G
r H Iy
G
Il segmento spaziale si compone di 24 satelliti artificiali, giacenti a 4 a 4 sullo stesso
piano orbitale. Ciascuno dei sei piani orbitali passa per il centro della terra e forma con il
piano equatoriale terrestre un angolo di 550.

P. Brandi - A. Salvadori, Matematica&Realtà 29
Le loro tracce sul piano equatoriale sono sei segmenti equidistribuiti (a 60
0) nell’angolo
giro.
Ciascun orbita è quasi circolare, ha raggio12
di 26.000 km e periodo di circa 12 ore.
Il sistema è progettato in modo da garantire in ciascun punto della terra la visibilità di
almeno quattro satelliti.
Ciascun satellite è provvisto di pannelli solari per l’approvvigionamento energetico e di
retrorazzi per eventuali manovre correttive dell’orbita. Inoltre è munito di misuratori di
tempo13
ad altissima precisione.
Sei stazioni di monitoraggio distribuite lungo la fascia equatoriale garantiscono un
accurato monitoraggio dei satelliti (traiettoria, sincronismo degli orologi, correttezza del
segnale, etc…). I dati raccolti dalle stazioni di monitoraggio sono trasmessi ad una
stazione principale a Falcon (Colorado) che li elabora ed eventualmente invia le
opportune correzioni direttamente ai satelliti. In particolare, gli orologi sono sincronizzati
12 I satelliti, che hanno una massa di circa 8 tonnellate, non sono geo-stazionari e viaggiano a circa 4 km/s ad un’altitudine
media di 22.000 km. 13 Costituito da quattro oscillatori (due al cesio e due al rubidio)

Sistema di posizionamento e navigazione satellitare 30
ad ogni giro con il tempo di Colorado Spring (tempo GPS).
Un apparecchio ricevente delle dimensioni di un cellulare, munito di antenna14
, capta i
segnali (ad alta frequenza) trasmessi verso terra dai satelliti. I dati acquisiti vengono
elaborati in tempo reale dall’apparecchio stesso. Nell’arco di qualche minuto appaiono
sul display sia la posizione del ricevente GPS, segnata su una cartina topografica, sia le
sue coordinate geografiche15
.
3.3 Note supplementari sul sistema GPS
Il modello di posizionamento GPS, come abbiamo già osservato, presuppone che il
ricevitore conosca – con alta precisione – la posizione dei satelliti osservati. Se il moto
dei satelliti fosse ideale, la loro orbita sarebbe un’ellisse e la loro posizione sarebbe
predicibile nel tempo grazie alle leggi di Klepero. In realtà le forze che agiscono su un
satellite causano fluttuazioni periodiche e degradazione delle orbite. Fra queste,
ricordiamo gli effetti gravitazioneli dovuti alla disomogeneità della Terra e alla presenza
della Luna e del Sole. Anche ricorrendo a equazioni complesse è impossibile costruire un
modello per predire il moto di un satellite per tempi lunghi.
Si ricorre quindi a una descrizione locale dell’orbita. L’orbita è suddivisa in 24 archi
adiacenti (un arco ogni ora) e ciascun arco è descritto16
da un blocco di parametri.
Il ricevitore acquisisce tali parametri17
(attraverso il segnale emesso dal satellite) e li
elabora per stimare la posizione , ,i i ix y z i del satellite Si (i = 1, 2, 3, 4).
Ciò è possibile in quanto il segnale18
emesso da ciascun satellite “trasporta” numerose
informazioni fra cui:
un codice per l’identificazione del satellite;
24 blocchi di parametri che permettono di descrivere l’orbita giornaliera del satellite;
un codice o un segnale binario (C/A, Corse o Clear Acquisition Code)19
della durata di
1 ms, composto da 1023 impulsi. Per mezzo di tale segnale viene rilevato il tempo ti
necessario al segnale per propagarsi dal satellite al ricevitore, da cui dedurre la
distanza di = c ti. La misura ti è concettualmente semplice da effettuare. Il codice
binario C/A in arrivo dal satellite viene confrontato con una sua replica generata dal
ricevitore. Correlando i due segnali si misura il “disallineamento temporale” ti ;
14 Le antenne dei ricevitori GPS devono poter vedere il cielo libero su di sé per ricevere il segnale satellitare; così non
funzionano in galleria o nei garage sotterranei. 15 Latitudine e longitudine nei sistemi di navigazione per terra e mare, mentre è aggiunta l’altitudine in quelli di navigazione aerea. 16
La stazione master di Colorado Spring, elaborando i dati raccolti dalle stazioni di monitoraggio a terra,
effettua una stima quotidiana dell’orbita e dell’offset d’orologio, previsti nelle 24 ore successive per ciascun
satellite. Le orbite sono parametrizzate e i dati inviati al satellite, il quale li comunicherà agli utenti nel corso
della giornata successiva. 17 Più in dettaglio, se il ricevitore esegue, per esempio, la misura alle ore 5.21, ricostruirà il sesto arco
dell’orbita attraverso il sesto blocco di parametro, così da stimare la posizione del satellite al 21–esimo
minuto. 18 Frequenza dell’onda portante sinusoidale 1575,42 MHz. 19 Fruibile da tutti i ricevitori, al contrario del codice Y (Precision o Protected Code), fruibile solo da
ricevitori militari o comunque abilitati, non reperibili in commercio.

P. Brandi - A. Salvadori, Matematica&Realtà 31
modelli per la rimozione parziale del disturbo dovuto all’atmosfera terrestre. La
velocità di propagazione20
del segnale subisce variazioni dovute allo stato fisico del
mezzo attraversato e di conseguenza s’induce un errore nella stima della distanza
satellite-ricevitore.
20 Il disturbo atmosferico è suddiviso in ionosferico e troposferico. Il primo è dovuto agli strati dell’atmosfera
compresi fra 100 e 1.000 Km di quota, il secondo agli strati compresi fra il suolo e 40 Km. Segnaliamo altri
due disturbi principali: il cosiddetto effetto multipath (dovuto a fenomeni di riflessione del segnale in
prossimità del ricevitore per la presenza di superfici riflettenti, come per esempio cartelloni pubblicitari, che
causano una sovrastima della distanza satellite-ricevitore) e l’errore dovuto al rumore elettronico di misura
(la cui entità si è recentemente ridotta per effetto dell’evoluzione dell’elettronica del ricevitore).
Bibliografia
[BS 2004] P.Brandi – A.Salvadori, Modelli matematici elementari, B.Mondadori (2004)