Il Principio dei Lavori Virtuali e le sue...
23
Il Principio dei Lavori Virtuali e le sue applicazioni C A P I T O L O 12 Il Principio dei Lavori Virtuali appassiona da molti secoli gli studiosi di Meccanica. Le figure sopra riportate illustrano studi pubblicati rispettivamente nel 1581, nel 1665 e nel 1725. In questo capitolo si mostra come il Principio dei Lavori Virtuali può essere usato per risolvere problemi dell’Ingegneria moderna. di Giuliano Augusti e Paolo Maria Mariano
-
Upload
trinhtuong -
Category
Documents
-
view
220 -
download
1
Transcript of Il Principio dei Lavori Virtuali e le sue...

Il Principio dei Lavori Virtualie le sue applicazioni
C A P I T O L O
12
Il Principio dei Lavori Virtuali appassiona da molti secoli gli studiosi di Meccanica. Le figuresopra riportate illustrano studi pubblicati rispettivamente nel 1581, nel 1665 e nel 1725. Inquesto capitolo si mostra come il Principio dei Lavori Virtuali può essere usato per risolvereproblemi dell’Ingegneria moderna.
di Giuliano Augusti e Paolo Maria Mariano
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

478 Il Principio dei Lavori Virtuali e le sue applicazioni
12.1 INTRODUZIONE
In questo capitolo si presenta una metodologia generale che permettedi risolvere molti problemi della Scienza delle Costruzioni, quali peresempio trovare reazioni vincolari, spostamenti di punti di una struttura, forze e momenti interni, ecc., senza fare ricorso volta per voltaa procedimenti ed espedienti particolari. Essa è basata sul cosiddettoPrincipio (o Teorema) dei Lavori Virtuali (detto anche, forse più ap-propriatamente, “del Lavoro Virtuale” e di seguito talvolta indicato conl’acronimo PLV).
La definizione di lavoro come prodotto di una forza data per lo spo-stamento del suo punto di applicazione è nota dalla Fisica elementare. Illavoro L è dato dal prodotto scalare del vettore forza F per il vettore spo-stamento u, cioè dalla somma dei prodotti delle rispettive componenti inun dato sistema di riferimento:
L = F · u = Fx ux + Fyuy + Fzuz (12.1)
Ovviamente, se le forze applicate sono più d’una, il lavoro è dato dallasomma di tante espressioni come la (12.1) quante sono le forze coinvolte(una formula analoga vale per il lavoro di una o più coppie per le rispet-tive rotazioni).
Se lo spostamento u è quello effettivamente subito dal punto di ap-plicazione della forza F, al lavoro si può attribuire l’aggettivo reale.1
Più in generale, si può pensare a forze applicate a un corpo e a unqualsiasi insieme di spostamenti dei punti di applicazione compatibili coni vincoli interni ed esterni del corpo stesso: in tal caso si attribuisce l’ag-gettivo virtuale (cioè immaginario, ideale) al lavoro che si indica nel se-guito con Lv . Nelle applicazioni, si associa di solito il lavoro virtuale aspostamenti piccolissimi (perché ci si limita spesso ad analisi sviluppatenell’ambito di teorie linearizzate), cioè ad atti di moto (avendo così a chefare in realtà con potenze virtuali): nel seguito tale associazione sarà sot-tintesa.
Il concetto di lavoro virtuale permette di costruire la metodologia ge-nerale di analisi che è oggetto di questo capitolo. Più precisamente, nelParagrafo 12.2 si tratta del principio dei lavori virtuali per gli atti di motorigido; tramite esso si possono determinare le reazioni vincolari e gli sforzi(forze e momenti) interni in sezioni di travi staticamente determinate (siveda la definizione nel Paragrafo 5.1). Il principio viene esteso nel Para-grafo 12.3 agli atti di moto deformativo; si possono così determinare (Pa-ragrafo 12.4) spostamenti e rotazioni in punti specifici di una trave ela-stica, nonché (Paragrafi 12.5-6) trovare reazioni vincolari, sforzi internie spostamenti di travi staticamente indeterminate.
Per semplicità, la trattazione viene limitata a travi, cioè a corpi solidicon una dimensione prevalente (per i quali si può ragionare in termini diforze e momenti interni, caratteristiche peculiari delle sezioni ortogonaliall’asse della trave, e trattare le deformazioni come movimenti relativi trasezioni), ma essa è facilmente estendibile a corpi solidi di qualsiasi formae alle tensioni puntuali.
1Da notare che, se la forza è applicata a una struttura o corpo vincolato, in genere l’intensitàdelle forza varia durante la sua applicazione, mentre varia lo spostamento al deformarsi dellastruttura. In questo caso il lavoro è dato dall’integrale dell’intensità istantanea della forza per lospostamento del punto di applicazione: si giunge così al concetto di lavoro (o energia) di defor-mazione, introdotto nel Capitolo 11, Paragrafo 11.2 e seguenti.
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
12.2 IL PRINCIPIO DEL LAVORO VIRTUALE PER ATTI DI MOTO RIGIDO
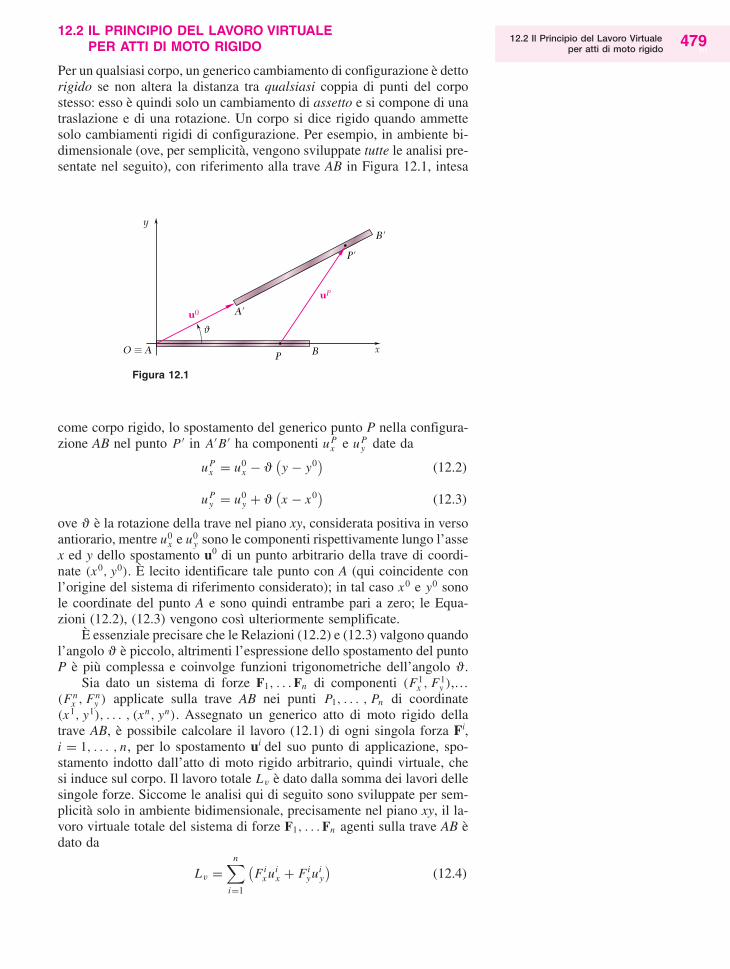
Per un qualsiasi corpo, un generico cambiamento di configurazione è dettorigido se non altera la distanza tra qualsiasi coppia di punti del corpostesso: esso è quindi solo un cambiamento di assetto e si compone di unatraslazione e di una rotazione. Un corpo si dice rigido quando ammettesolo cambiamenti rigidi di configurazione. Per esempio, in ambiente bi-dimensionale (ove, per semplicità, vengono sviluppate tutte le analisi pre-sentate nel seguito), con riferimento alla trave AB in Figura 12.1, intesa
12.2 Il Principio del Lavoro Virtuale 479per atti di moto rigido m
P B
A
′
P
′
B
′
O ≡ A
ϑ
u0
uP
x
y
Figura 12.1
come corpo rigido, lo spostamento del generico punto P nella configura-zione AB nel punto P ′ in A′ B ′ ha componenti u P
x e u Py date da
u Px = u0
x − q (y − y0
)(12.2)
u Py = u0
y + q (x − x0
)(12.3)
ove q è la rotazione della trave nel piano xy, considerata positiva in versoantiorario, mentre u0
x e u0y sono le componenti rispettivamente lungo l’asse
x ed y dello spostamento u0 di un punto arbitrario della trave di coordi-nate (x0, y0). È lecito identificare tale punto con A (qui coincidente conl’origine del sistema di riferimento considerato); in tal caso x0 e y0 sonole coordinate del punto A e sono quindi entrambe pari a zero; le Equa-zioni (12.2), (12.3) vengono così ulteriormente semplificate.
È essenziale precisare che le Relazioni (12.2) e (12.3) valgono quandol’angolo q è piccolo, altrimenti l’espressione dello spostamento del puntoP è più complessa e coinvolge funzioni trigonometriche dell’angolo q.
Sia dato un sistema di forze F1, . . . Fn di componenti (F1x , F1
y ),…(Fn
x , Fny ) applicate sulla trave AB nei punti P1, . . . , Pn di coordinate
(x1, y1), . . . , (xn, yn). Assegnato un generico atto di moto rigido dellatrave AB, è possibile calcolare il lavoro (12.1) di ogni singola forza Fi,i = 1, . . . , n, per lo spostamento ui del suo punto di applicazione, spo-stamento indotto dall’atto di moto rigido arbitrario, quindi virtuale, chesi induce sul corpo. Il lavoro totale Lv è dato dalla somma dei lavori dellesingole forze. Siccome le analisi qui di seguito sono sviluppate per sem-plicità solo in ambiente bidimensionale, precisamente nel piano xy, il la-voro virtuale totale del sistema di forze F1, . . . Fn agenti sulla trave AB èdato da
Lv =n∑
i=1
(Fi
x uix + Fi
yuiy
)(12.4)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

È possibile mostrare che la trave AB, soggetta al sistema di forze F1, . . . Fn ,è in equilibrio se
Lv = 0 (12.5)
per qualsiasi atto di moto rigido che si attribuisca alla trave.È questo il principio dei lavori virtuali per corpi rigidi. La genera-
lizzazione della Relazione (12.4) al caso tridimensionale è immediata: ba-sta aggiungere il contributo della componente delle varie forze lungol’asse z per le relative componenti di spostamento.
Il fatto che la Condizione (12.5) debba valere per qualsiasi atto dimoto rigido, una volta che il sistema di forze sia stato assegnato, è essen-ziale per la valutazione dell’equilibrio. Sostituendo infatti nella (12.4) lerelazioni (12.2) e (12.3) si vede facilmente che la Relazione (12.5) diventa( n∑
i=1
Fix
)u0
x +( n∑
i=1
Fiy
)u0
y + qn∑
i=1
(Fi
x (yi − y0) + Fiy(xi − x0)
) = 0(12.6)
L’imporre che la (12.6) sia valida per qualsiasi scelta degli spostamentirigidi, quindi per qualsiasi scelta di u0
x , u0y e q, implica che devono veri-
ficarsi le relazionin∑
i=1
Fix = 0 (12.7)
n∑i=1
Fiy = 0 (12.8)
n∑i=1
(Fi
x
(yi − y0
) + Fiy
(xi − x0
)) = 0 (12.9)
Ove la scelta di u0x , u0
y e q non fosse lasciata arbitraria, non sarebbe le-cito dedurre le (12.7), (12.8) e (12.9) dalla Condizione (12.6).
La (12.7) e la (12.8) richiedono che la somma delle componenti delleforze F1, . . . Fn lungo l’asse x sia pari a zero così come la somma dellecomponenti lungo y. Le due Relazioni (12.7) e (12.8) equivalgono quindiall’equazione di equilibrio alla traslazione
n∑i=1
Fi = 0 (12.10)
che è la prima equazione della statica (somma delle forze pari a zero).In maniera analoga è immediato riconoscere che la (12.9) non è altro chela richiesta che la somma dei momenti M1, . . . Mn delle forze F1, . . . Fn
rispetto al punto arbitrario (x0, y0) sia pari a zero, cioèn∑
i=1
Mi = 0 (12.11)
che è la seconda equazione della statica (equilibrio alla rotazione).Quando si considera un corpo vincolato, nel relativo schema di corpo
libero agiscono sul corpo sia le forze esterne sia le reazioni vincolari, lequali compaiono come incognite nelle equazioni (12.10) e (12.11). Si haa che fare quindi con un sistema di Equazioni lineari: se si possono scri-vere tante equazioni indipendenti quante sono le reazioni vincolari inco-gnite e il determinante della matrice dei coefficienti di tale sistema è di-verso da zero, la struttura si definisce staticamente determinata; le reazioniincognite si possono cioè determinare esclusivamente dalle condizioni diequilibrio (12.10) e (12.11). Se invece il numero delle reazioni vincolari
480 Il Principio dei Lavori Virtuali e le sue applicazioni
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

(incognite) è maggiore di quello dei gradi di libertà del sistema e il rango2
della matrice dei coefficienti è pari al numero di gradi di libertà, le solecondizioni di equilibrio non sono sufficienti a determinare le incognite ela struttura si definisce staticamente indeterminata (si vedano i Paragrafi2.9 e 5.1). Infine, se il numero delle reazioni vincolari è inferiore a quellodei gradi di libertà, la struttura ammette spostamenti rigidi (è cioè un mec-canismo) e l’equilibrio può essere verificato solo per particolari schemidi carico. Tutti i casi in cui il rango della matrice dei coefficienti del si-stema delle equazioni di equilibrio è inferiore al numero delle incognite(cioè delle reazioni vincolari) rappresentano situazioni in cui alcuni vin-coli sono mal disposti in quanto ripetono le restrizioni imposte da altri.
Nel caso di strutture staticamente determinate, detto n il numero dellereazioni vincolari incognite, il PLV consente di scrivere n equazioni cia-scuna in una sola incognita, invece di un sistema di n equazioni in n in-cognite.3 A tal fine basta imporre allo schema di corpo libero della traveun atto di moto che faccia compiere lavoro a una sola reazione, diciamoR1, e applicare la Condizione (12.5) ottenendo così un’equazione alge-brica nella quale appare la sola incognita R1. Per maggiore evidenza, sipuò immaginare di sopprimere soltanto il vincolo corrispondente alla rea-zione R1 e di sostituirlo con la R1 stessa: la struttura acquista la possibi-lità di una classe di atti di moto virtuali rigidi nella quale compiono la-voro le forze esterne (note) e la R1 (incognita). A questo punto, laCondizione (12.5) e l’arbitrarietà dell’atto di moto rigido permettono dideterminare un’equazione algebrica in cui la sola incognita è R1.
Nel seguito, lo schema risultante dalla soppressione di un vincolo edalla sua sostituzione con la reazione pertinente viene chiamato schemadi corpo semilibero. La stessa locuzione viene anche usata ove si soppri-mano più vincoli ma non li si eliminino tutti.
12.2 Il Principio del Lavoro Virtuale 481per atti di moto rigido m
2Si ricorda che si definisce rango di una matrice quadrata l’ordine massimo dei minori di-versi da zero. Se si ha per esempio una matrice 3×3 di cui al massimo le sottomatrici 2×2 hannodeterminante diverso da zero, si dirà che la matrice è di rango 2; se invece la matrice stessa hadeterminante diverso da zero, allora si dirà che essa è di rango 3.
3Questo procedimento semplifica di molto la soluzione manuale e può essere utilizzato perverificare il valore di una o più incognite se si usano procedimenti di soluzione automatica.
ESEMPIO 12.01
Determinare la reazione RB del carrello nell’estremo destrodella trave rappresentata nell’Esempio 5.01 e verificare che lacomponente orizzontale RH della reazione della cerniera A sianulla.
Se si sopprime il vincolo B e lo si sostituisce con la reazioneincognita RB, si ottiene lo schema di corpo semilibero rap-presentato nella Figura 12.2.
La trave AB, di lunghezza � , ha in queste condizioni unsolo grado di libertà nel piano: la rotazione q attorno al puntoA, rotazione che può essere scelta in maniera arbitraria e cheinduce uno spostamento verticale dei punti di applicazionedelle forze F ed RB , quest’ultima di intensità RB incognita.Un possibile arbitrario atto di moto rigido porta la trave nella
F
RB
�12 �
12
A B
Figura 12.2
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

Analogo procedimento si può seguire per trovare uno sforzo interno (ta-glio, forza assiale, momento) in una qualsiasi sezione di una trave stati-camente determinata.
A tal fine, si immagina di consentire una possibilità di moto relativonella sezione considerata: per esempio, ove si voglia determinare il va-lore del momento flettente si introduce una cerniera e si applicano duecoppie eguali e contrarie tali da ristabilire l’equilibrio. La relazione (12.5)fornisce in tal caso il momento nella sezione considerata. Introducendoinvece un vincolo che consente traslazioni relative ortogonali all’asse dellatrave (un cosiddetto glifo), si può ottenere la forza di taglio nella sezione.Anche in questi casi si ottiene uno schema di corpo semilibero. Il con-sentire, infatti, nella sezione considerata un moto relativo coniugato conlo sforzo interno che si vuole determinare corrisponde a “ridurre” il vin-colo di incastro tra le due parti della trave che s’incontrano nella sezioneconsiderata, quindi a svincolare un grado di libertà, trasformando la travein un meccanismo.
482
Il lavoro della forza esterna F, di intensità F , è quindi datoda
−Fq�
2(12.13)
il segno meno dovuto al fatto che lo spostamento di C av-viene in verso opposto a quello della forza F, mentre il la-voro della reazione vincolare in B è pari a
RBq� (12.14)
Il principio dei lavori virtuali (12.5) richiede che, per l’equi-librio, RB debba essere tale che
−Fq�
2+ RBq� = 0 (12.15)
qualunque sia il valore di q che è scelto arbitrariamente maè piccolo per quanto ricordato a commento delle relazioni(12.2) e (12.3)). Di conseguenza, dalla (12.15) si deduce
RB = F
2(12.16)
un risultato già ottenuto nell’Esempio 5.01.
Si voglia ora calcolare la reazione orizzontale nel punto A.Lo schema di corpo semilibero corrispondente è descrittonella Figura 12.4 (alla cerniera in A è stato sostituito un car-rello che permette la traslazione orizzontale della trave).
configurazione variata descritta nella Figura 12.3, ove l’am-piezza degli spostamenti in C e B è data da
uC = q �
2u B = q� (12.12)
�12 �
12
ϑ
BCA
Figura 12.3
F
RA
Figura 12.4
In questo caso, un arbitrario rappresentante della classe deipossibili moti rigidi virtuali ammissibili per lo schema semi-libero considerato genera una configurazione variata comequella in Figura 12.5, ove uA è lo spostamento del punto A,di ampiezza uA arbitraria.
F
RA
uA
Figura 12.5
Di conseguenza, siccome lo spostamento del punto C è an-ch’esso pari a uA, perché l’atto di moto è rigido, ed è altresìortogonale alla forza F, il lavoro di quest’ultima è nullo men-tre il lavoro della reazione orizzontale RA, di intensità RA in-cognita, è dato da
R Au A (12.17)
La Relazione (12.5) e l’arbitrarietà di uA implicano allora
R A = 0 (12.18)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
483
ESEMPIO 12.02
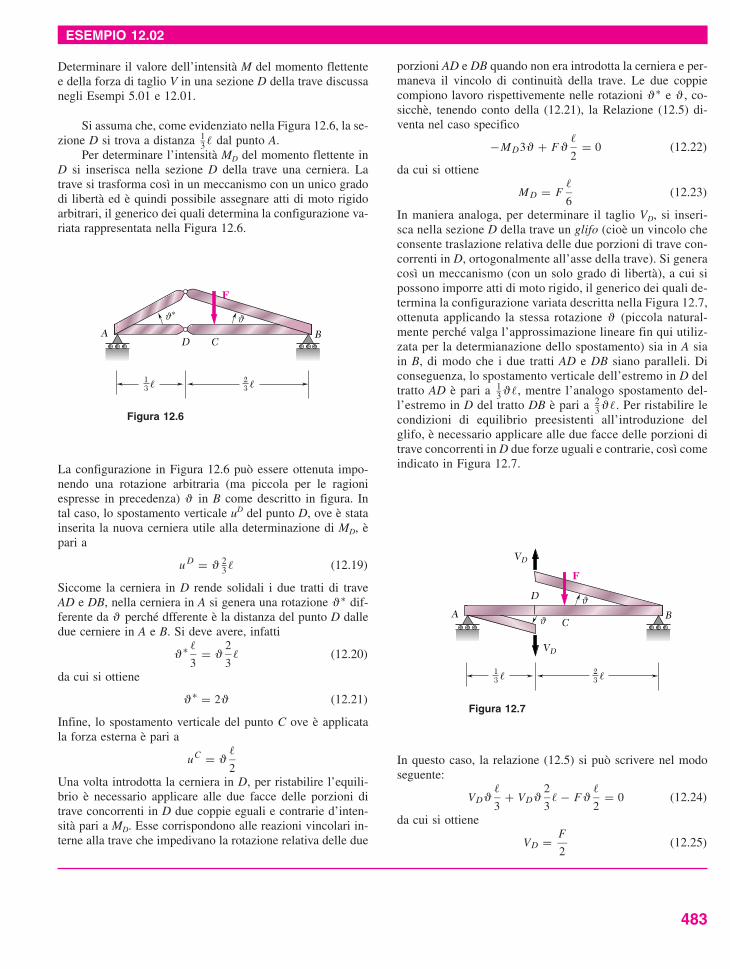
Determinare il valore dell’intensità M del momento flettentee della forza di taglio V in una sezione D della trave discussanegli Esempi 5.01 e 12.01.
Si assuma che, come evidenziato nella Figura 12.6, la se-zione D si trova a distanza 1
3� dal punto A.Per determinare l’intensità MD del momento flettente in
D si inserisca nella sezione D della trave una cerniera. Latrave si trasforma così in un meccanismo con un unico gradodi libertà ed è quindi possibile assegnare atti di moto rigidoarbitrari, il generico dei quali determina la configurazione va-riata rappresentata nella Figura 12.6.
La configurazione in Figura 12.6 può essere ottenuta impo-nendo una rotazione arbitraria (ma piccola per le ragioniespresse in precedenza) q in B come descritto in figura. Intal caso, lo spostamento verticale uD del punto D, ove è statainserita la nuova cerniera utile alla determinazione di MD, èpari a
u D = q 23� (12.19)
Siccome la cerniera in D rende solidali i due tratti di traveAD e DB, nella cerniera in A si genera una rotazione q∗ dif-ferente da q perché dfferente è la distanza del punto D dalledue cerniere in A e B. Si deve avere, infatti
q∗ �
3= q 2
3� (12.20)
da cui si ottiene
q∗ = 2q (12.21)
Infine, lo spostamento verticale del punto C ove è applicatala forza esterna è pari a
uC = q �
2Una volta introdotta la cerniera in D, per ristabilire l’equili-brio è necessario applicare alle due facce delle porzioni ditrave concorrenti in D due coppie eguali e contrarie d’inten-sità pari a MD. Esse corrispondono alle reazioni vincolari in-terne alla trave che impedivano la rotazione relativa delle due
F
ϑ*ϑ
BCD
A
�13 �
23
Figura 12.6
F
ϑ
ϑB
C
D
A
VD
VD
�13 �
23
Figura 12.7
porzioni AD e DB quando non era introdotta la cerniera e per-maneva il vincolo di continuità della trave. Le due coppiecompiono lavoro rispettivemente nelle rotazioni q∗ e q, co-sicchè, tenendo conto della (12.21), la Relazione (12.5) di-venta nel caso specifico
−MD3q + Fq�
2= 0 (12.22)
da cui si ottiene
MD = F�
6(12.23)
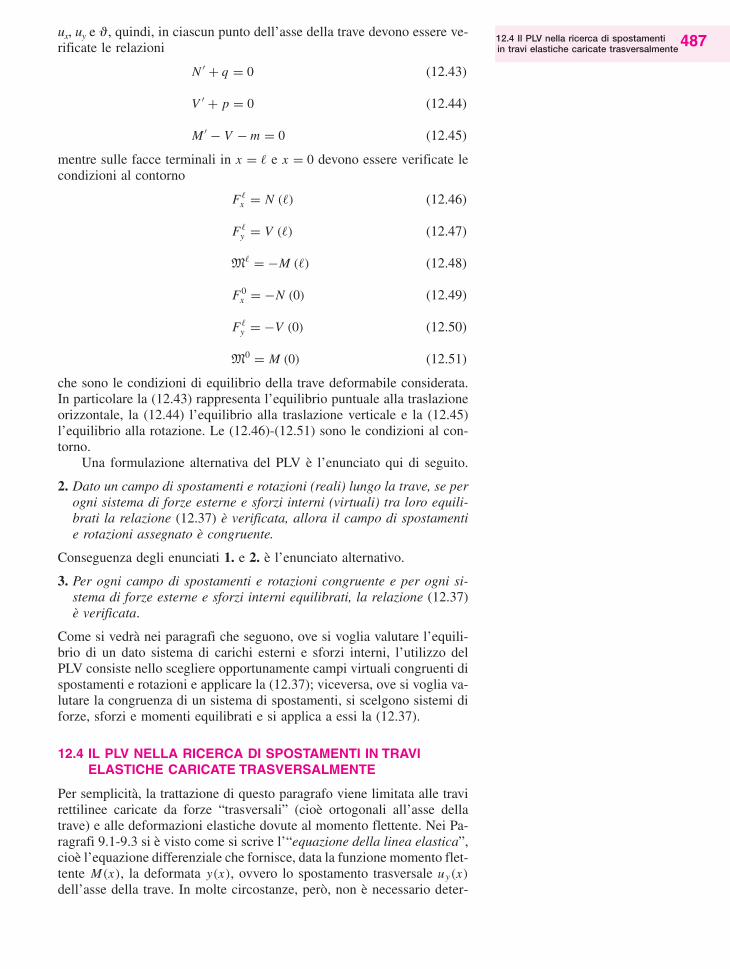
In maniera analoga, per determinare il taglio VD, si inseri-sca nella sezione D della trave un glifo (cioè un vincolo checonsente traslazione relativa delle due porzioni di trave con-correnti in D, ortogonalmente all’asse della trave). Si generacosì un meccanismo (con un solo grado di libertà), a cui sipossono imporre atti di moto rigido, il generico dei quali de-termina la configurazione variata descritta nella Figura 12.7,ottenuta applicando la stessa rotazione q (piccola natural-mente perché valga l’approssimazione lineare fin qui utiliz-zata per la determianazione dello spostamento) sia in A siain B, di modo che i due tratti AD e DB siano paralleli. Diconseguenza, lo spostamento verticale dell’estremo in D deltratto AD è pari a 1
3q�, mentre l’analogo spostamento del-l’estremo in D del tratto DB è pari a 2
3q�. Per ristabilire lecondizioni di equilibrio preesistenti all’introduzione delglifo, è necessario applicare alle due facce delle porzioni ditrave concorrenti in D due forze uguali e contrarie, così comeindicato in Figura 12.7.
In questo caso, la relazione (12.5) si può scrivere nel modoseguente:
VDq�
3+ VDq
2
3� − Fq
�
2= 0 (12.24)
da cui si ottiene
VD = F
2(12.25)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

Si noti che, ripetendo le operazioni sopra descritte per più sezioni, si pos-sono tracciare per punti i diagrammi del taglio e del momento flettente;questo procedimento risulta quindi particolarmente utile per carichi ge-nerici e vincoli multipli, e comunque quando le funzioni analitiche chedescrivono detti diagrammi non sono semplici. Si possono inoltre ritro-vare tutte le proprietà dei diagrammi del taglio e del momento individuatenel Capitolo 5.
484 Il Principio dei Lavori Virtuali e le sue applicazioni
ESEMPIO 12.03
Determinare il momento flettente MD e il taglio VD nella se-zione D della struttura rappresentata nella Figura 5.4(b), sog-getta a un carico distribuito costante sul tratto HC, di lun-ghezza 2
3�, come indicato nella Figura 12.8.
Per calcolare il valore MD si inserisce in D una cerniera. Intal modo la struttura diventa un meccanismo a un grado di li-bertà. Un generico atto di moto rigido virtuale permette di ot-tenere, quindi, la configurazione variata in Figura 12.9, otte-nuta imponendo una rotazione q in A. Siccome la sezione Dè situata a metà del tratto AB, la rotazione in B è pari a q,mentre quella in C è pari a 1
2q. Quest’ultimo valore si deter-mina come nell’Esempio 12.2: la cerniera in H rende solidali
CBD H
A
�12 �
12 �
13 �
23
p
Figura 12.8
CBD
H
A
p
Figura 12.9
i tratti DH e HC, quindi lo spostamento uH in H, calcolatocon riferimento alla rotazione in B deve essere pari a quellocalcolato con riferimento alla rotazione in C, rotazione chequi si indica con q̄, di conseguenza, siccome q si immaginaessere piccolo, deve essere
u H = q �
3= q̄ 2�
3(12.26)
da cui
q̄ = q2
(12.27)
Per tal motivo, lo spostamento di un generico punto apparte-nente al tratto HC è pari a
q
2x (12.28)
ove x è calcolato a partire da C ed è quindi la distanza delpunto considerato da C.
Analogamente all’Esempio 12.02, per ristabilire l’equi-librio è necessario applicare alle due facce delle porzioni ditrave concorrenti in D due coppie eguali e contrarie d’inten-sità pari a MD, e ciascuna di esse compie lavoro nella rota-zione q. Di conseguenza, la relazione (12.5) diventa
2qMD +∫ 2
3 �
0pq
2xd x = 0 (12.29)
ove il secondo addendo è il lavoro totale del carico unifor-memente distribuito sul tratto HC. Il calcolo dell’integralepermette di scrivere
2qMD + q p�2
9= 0 (12.30)
da cui si ottiene
MD = − p�2
18(12.31)
Si osservi che il valore dell’integrale in (12.29) è pari al la-voro che la risultante del carico distribuito su tratto HC com-pie nello spostamento del suo punto di applicazione, posto ametà del tratto HC, a 1
3� da C. Lo spostamento verticale delpunto medio del tratto HC è infatti pari a 1
2q × 13� = 1
6q�
mentre la risultante del carico uniformemente distribuito èpari a 2
3 p�, di conseguenza il lavoro della forza risultante èdato da 2
3 p� × 16q� = 1
9q p�2.Per determinare il taglio in VD si inserisce un glifo in D,
dando luogo a un meccanismo con un unico grado di libertà.Si possono quindi assegnare generici atti di moto rigido la cuitipica configurazione variata conseguente è analoga a quelladi Figura 12.7. Essa è ottenuta imponendo in A una rotazioneq e una rotazione uguale e contraria in B di modo che i trattiAD e DB, entrambi di lunghezza 1
2�, siano paralleli. Di con-seguenza, la cerniera in H, posto a distanza 1
3� da B, subisceuno spostamento verticale pari a 1
3q� e determina in C unarotazione pari a 1
2q (si veda la (12.27)) cosicché lo sposta-mento di un generico punto nel tratto HC, posto a distanza xda C, è dato dalla (12.28).In questo caso la Relazione (12.5) diventa quindi
VDq�
2+ VDq
�
2+
∫ 23 �
0pq
2xd x = 0 (12.32)
da cui si ottiene
VD = − p�
3(12.33)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

12.3 IL PRINCIPIO DEI LAVORI VIRTUALI PER ATTI DI MOTO DEFORMATIVO
Nel valutare gli sforzi interni, momento M, taglio V e sforzo normale Nnelle sezioni di una generica trave si sono sfruttate le caratteristiche geo-metriche della trave stessa. Si è cioè tenuto conto che la trave è un solidoprismatico con una dimensione molto più grande delle altre. Di conse-guenza si può immaginare di assegnare in ciascun punto dell’asse dellatrave informazioni su ciò che accade nella sezione ortogonale all’assestesso nel punto considerato. Questo punto di vista ha portato all’intro-duzione degli sforzi interni (momento, taglio e sforzo normale) come mi-sure globali dello stato tensionale della sezione. Lo stesso punto di vistapuò essere adottato ove si voglia valutare lo stato deformativo di una trave:si possono cioè considerare gli spostamenti dei punti dell’asse della travee associare a ogni punto x informazioni su spostamenti, rotazionie deformazioni della sezione in x e del suo intorno. In questa trattazionesi introduce l’ipotesi che nell’atto di moto deformativo ogni sezione dellatrave rimanga piana, ipotesi detta delle sezioni piane.
Sia data per esempio una trave che nella configurazione di riferimentosia ad asse rettilineo, di lunghezza �, coincidente con l’intervallo [0, �]dell’asse x nel piano xy. Su [0, �] si possono quindi definire tre funzionicontinue e derivabili i cui valori nel generico x sono indicati rispettiva-mente da ux(x), uy(x) e q(x) e rappresentano, i primi due, le componentilungo gli assi x ed y, rispettivamente, dello spostamento del punto x men-tre, il terzo, la rotazione della sezione. L’analisi di una trave deformabileè quindi ridotta a uno schema meccanico monodimensionale: le funzioniux, uy e q che individuano la configurazione deformata della trave sonoinfatti solo funzioni di x.
Si consideri ora una sezione in x e una, a essa parallela nella confi-gurazione rettilinea di riferimento, in x + dx . Le due sezioni possono (a)allontanarsi l’una rispetto all’altra, pur rimanendo parallele, (b) scorrerereciprocamente, pur rimanendo parallele, (c) ruotare l’una relativamenteall’altra.
Si indichi quindi con ε(x)dx l’allontanamento tra le due sezioni indirezione x, con g(x)dx lo scorrimento tra le due sezioni in direzione ye con x(x)dx la rotazione relativa tra le due sezioni (ε = εx è la defor-mazione lineare unitaria definita al Paragrafo 2.2; g = gxy è la deforma-zione angolare di scorrimento definita nel Paragrafo 2.14; x = 1
rè la cur-
vatura flessionale della trave, introdotta nel Paragrafo 4.4).Si dice che la terna {ux, uy, q} genera una deformazione congruente se
ε (x) = u′x (x) , g (x) = u′
y (x) − q (x) , x (x) = q′ (x) (12.34)
ove l’apice indica derivata rispetto ad x.Al deformarsi della trave, gli sforzi interni compiono lavoro nelle defor-
mazioni pertinenti, punto per punto, cosicché il lavoro totale, detto internoperché dovuto a sforzi interni alla trave, e indicato con Li
v, è dato da
Liv =
∫ �
0
(Nε + Vg+ Mx
)dx (12.35)
Esso è virtuale perché ε, g e x non sono necessariamente le misure delladeformazione reale ma sono, più in generale, misure di una deformazionearbitraria, compatibile con il vincolo interno di continuità della trave.
Si consideri ora la trave caricata da un carico trasversale distribuitop(x), un carico longitudinale q(x) e una distribuzione continua di mo-mento flettente m(x); inoltre si abbiano forze e coppie applicate in �, in-
12.3 Il Principio dei Lavori Virtuali 485per atti di moto deformativo m
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

dicate con F�x , F�
y ed M� rispettivamente, e in 0 ove sono indicate conF0
x , F0y ed M0 (per semplicità le reazioni di eventuali vincoli in � e 0 sono
incluse tra le forze F e le coppie M). Non si considerano vincoli di sorta,per semplicità. Il lavoro virtuale delle forze esterne, indicato con Le
v , èquindi pari a
Lev =
∫ �
0(qux + puy + mq)dx + F�
x ux(�) + F�y uy(�) + M
�q(�)+
+ F0x ux (0) + F0
y uy (0) + M0q (0)
(12.36)
Una delle possibili formulazioni del principio dei lavori virtuali per travideformabili è l’enunciato presentato nel seguito.
1. Dato un sistema di forze esterne e sforzi interni (reali), se per qual-siasi deformazione congruente {ux, uy, q} (virtuale)
Lev − Li
v = 0 (12.37)
1. allora la trave è in equilibrio.Per dimostrare la validità dell’enunciato precedente, si osservi innanzi-tutto che se un’arbitraria deformazione virtuale è congruente, allora, gra-zie alla (12.34), l’espressione del lavoro virtuale interno (12.35) diventa
Liv =
∫ �
0
(Nu′
x + V(u′
y − q) − Mq′) dx (12.38)
d’altra parte, però,
Nu′x = (Nux)
′ − N ′ux (12.39)
e analoghe relazioni valgono per V u′y ed Mq′, inoltre∫ �
0(Nux)
′ dx = N (�) ux (�) − N (0) ux (0) (12.40)
perché è semplicemente l’integrale della derivata della funzione Nux . Re-lazioni simili valgono per (V uy)
′ e (Mq)′. Di conseguenza, il lavoro in-terno può essere scritto nel modo seguente:
Liv = N (�) ux (�) − N (0) ux (0) + V (�) uy (�) − V (0) uy (0)−
−M (�)q (�) + M (0)q (0) −∫ �
0
(N ′ux + V ′uy − Vq− M ′q
)dx
(12.41)
Tenendo conto delle relazioni (12.36) e (12.41), la (12.37) diventa
∫ �
0
((q + N ′) ux + (
p + V ′) uy + (m + V − M ′)q)
dx+
+ (F�
x − N (�))
ux (�) + (F�
y − V (�))
uy (�)+
+ (M
� + M (�))q (�) + (
F0x + N (0)
)ux (0)+
+ (F�
y + V (0))
uy (0) + (M
0 − M (0))q (0) = 0
(12.42)
Infine, siccome la (12.42) deve essere valida per qualsiasi deformazionecongruente, cioè per qualsiasi scelta di ux, uy e q congruenti, visto che la(12.42) è lineare in ux, uy e q, devono annullarsi i fattori che moltiplicano
486 Il Principio dei Lavori Virtuali e le sue applicazioni
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
ux, uy e q, quindi, in ciascun punto dell’asse della trave devono essere ve-rificate le relazioni
N ′ + q = 0 (12.43)
V ′ + p = 0 (12.44)
M ′ − V − m = 0 (12.45)
mentre sulle facce terminali in x = � e x = 0 devono essere verificate lecondizioni al contorno
F�x = N (�) (12.46)
F�y = V (�) (12.47)
M� = −M (�) (12.48)
F0x = −N (0) (12.49)
F�y = −V (0) (12.50)
M0 = M (0) (12.51)
che sono le condizioni di equilibrio della trave deformabile considerata.In particolare la (12.43) rappresenta l’equilibrio puntuale alla traslazioneorizzontale, la (12.44) l’equilibrio alla traslazione verticale e la (12.45)l’equilibrio alla rotazione. Le (12.46)-(12.51) sono le condizioni al con-torno.
Una formulazione alternativa del PLV è l’enunciato qui di seguito.
2. Dato un campo di spostamenti e rotazioni (reali) lungo la trave, se perogni sistema di forze esterne e sforzi interni (virtuali) tra loro equili-brati la relazione (12.37) è verificata, allora il campo di spostamentie rotazioni assegnato è congruente.
Conseguenza degli enunciati 1. e 2. è l’enunciato alternativo.
3. Per ogni campo di spostamenti e rotazioni congruente e per ogni si-stema di forze esterne e sforzi interni equilibrati, la relazione (12.37)è verificata.
Come si vedrà nei paragrafi che seguono, ove si voglia valutare l’equili-brio di un dato sistema di carichi esterni e sforzi interni, l’utilizzo delPLV consiste nello scegliere opportunamente campi virtuali congruenti dispostamenti e rotazioni e applicare la (12.37); viceversa, ove si voglia va-lutare la congruenza di un sistema di spostamenti, si scelgono sistemi diforze, sforzi e momenti equilibrati e si applica a essi la (12.37).
12.4 IL PLV NELLA RICERCA DI SPOSTAMENTI IN TRAVIELASTICHE CARICATE TRASVERSALMENTE
Per semplicità, la trattazione di questo paragrafo viene limitata alle travirettilinee caricate da forze “trasversali” (cioè ortogonali all’asse dellatrave) e alle deformazioni elastiche dovute al momento flettente. Nei Pa-ragrafi 9.1-9.3 si è visto come si scrive l’“equazione della linea elastica”,cioè l’equazione differenziale che fornisce, data la funzione momento flet-tente M(x), la deformata y(x), ovvero lo spostamento trasversale uy(x)
dell’asse della trave. In molte circostanze, però, non è necessario deter-
12.4 Il PLV nella ricerca di spostamenti 487in travi elastiche caricate trasversalmente
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
minare l’intera deformata della trave, bensì conoscere solo il valore dellospostamento in alcuni punti, spostamento provocato dall’applicazionedi un dato carico reale. All’uopo il PLV si dimostra particolarmente ef-ficiente. In queste applicazioni si sceglie come campo di spostamenti edeformazioni quello effettivo (reale) congruente e un sistema (arbitra-rio) fittizio (virtuale) di forze equilibrate scelto in modo che la (12.37)contenga la grandezza che si vuole determinare. Per esempio, se si de-sidera calcolare lo spostamento verticale in una sezione, indicato conuy(x̄), ove x̄ è la posizione della sezione in esame, si introduce un si-stema equilibrato fittizio costituito da una singola forza F* (spesso chia-mata carico esploratore) avente la direzione dello spostamento inco-gnito e intensità di valore arbitrario assegnato, dalle corrispondentireazioni vincolari (irrilevanti nei calcoli se i vincoli sono rigidi) e da-gli sforzi interni N*, V* ed M*. Così facendo la Relazione (12.37) di-venta
F∗uy (x̄) =∫ �
0
(N ∗ε + V ∗g+ M∗x
)dx (12.52)
Il sistema di carico qui considerato (l’unica forza F*) non determina sforzonormale, inoltre, quale approssimazione verificata di frequente nelle ap-plicazioni pratiche, si ipotizza qui di seguito che la deformabilità a scor-rimento della trave sia trascurabile, sia quindi trascurabile il termine V ∗gpunto per punto. Di conseguenza la (12.52) si riduce a
F∗uy (x̄) =∫ �
0M∗xdx (12.53)
Siccome il sistema di carico è la sola forza F*, il valore del momento M*in qualsiasi sezione dipende linearmente dal modulo F* della forza vir-tuale considerata. Di conseguenza, si può scegliere F∗ = 1. La (53) si ri-duce quindi a
uy (x̄) =∫ �
0M∗xdx (12.54)
ove M* è ora il momento generato dalla forza fittizia di modulo unitario.Il primo membro della (12.54) è la grandezza incognita. Le quantità sottoil segno di integrale al secondo membro sono note: infatti è possibile de-terminare la distribuzione del momento flettente reale M(x) indotto daicarichi esterni. D’altra parte x(x) è la curvatura flessionale reale dellatrave, quella prodotta dal carico reale applicato alla trave stessa, quindise il comportamento della trave è puramente elastico lineare è possibilefar uso della (4.21) che lega il momento reale alla curvatura x (indicatanella (4.21) con 1/r), cioè della relazione costitutiva
x = M
E I(12.55)
La Relazione (12.54) diventa quindi
uy (x̄) =∫ �
0M∗ M
E Idx (12.56)
che è la relazione che permette di determinare il valore uy(x̄) cercato: inessa, naturalmente, il primo termine è da intendersi come 1 × uy(x̄), rap-presentando 1 il valore unitario della forza.
488 Il Principio dei Lavori Virtuali e le sue applicazioni
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
Infine, se vi sono aggiuntive variazioni di curvatura indotte da variazionitermiche �T , distribuite “a farfalla” lungo ogni generica sezione di al-tezza h, o da distorsioni flessionali anelastiche xa assegnate a priori, nel-l’ambito delle limitazioni della teoria linearizzata che qui si discute, essedebbono essere aggiunte alla curvatura elastica e si ha
x = xe + xt + xa (12.57)
ove
xe = M
E I, xt = a�T
h(12.58)
con α il coefficiente di dilatazione termica.Ove in luogo di uy(x̄) si voglia calcolare la rotazione q(x̄) nello stesso
punto basta applicare, per le stesse ragioni che hanno portato alla (12.56),una coppia unitaria M in x̄ cosicché la (12.56) diventa
q (x̄) =∫ �
0M∗ M
E Idx (12.59)
ove M* è questa volta il momento indotto sulla trave da M e il primo ter-mine dell’Equazione (12.59) è da intendersi come 1 × q(x̄).
In tutti gli esempi successivi si immagina che ogni trave sia omoge-nea e a sezione costante: il prodotto EI è quindi considerato costante.
ESEMPIO 12.04
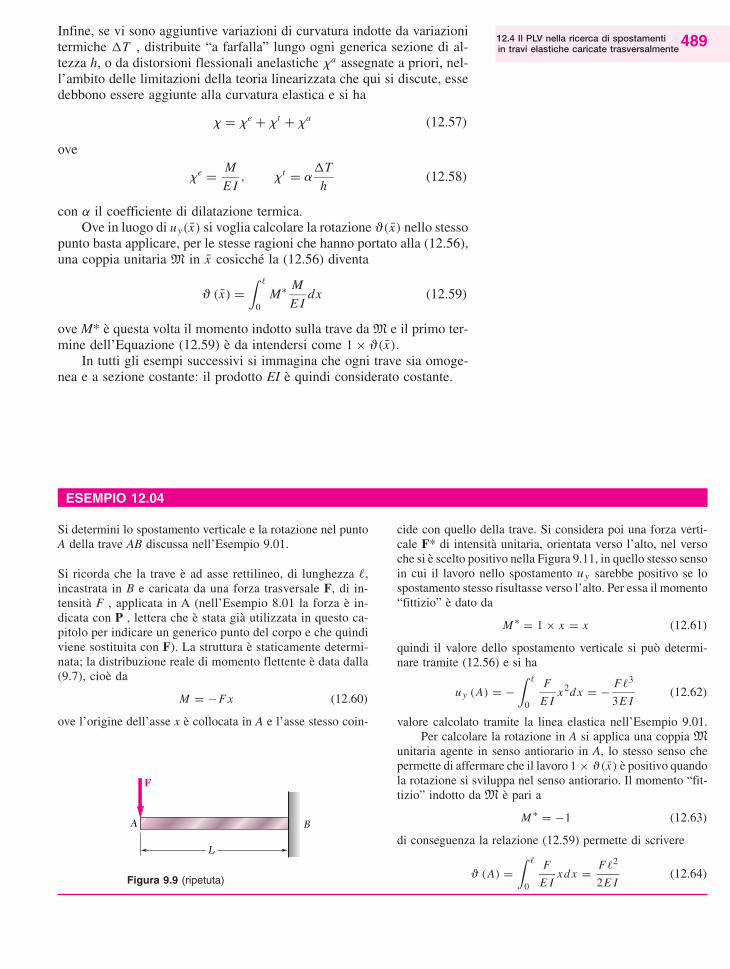
Si determini lo spostamento verticale e la rotazione nel puntoA della trave AB discussa nell’Esempio 9.01.
Si ricorda che la trave è ad asse rettilineo, di lunghezza �,incastrata in B e caricata da una forza trasversale F, di in-tensità F , applicata in A (nell’Esempio 8.01 la forza è in-dicata con P , lettera che è stata già utilizzata in questo ca-pitolo per indicare un generico punto del corpo e che quindiviene sostituita con F). La struttura è staticamente determi-nata; la distribuzione reale di momento flettente è data dalla(9.7), cioè da
M = −F x (12.60)
ove l’origine dell’asse x è collocata in A e l’asse stesso coin-
cide con quello della trave. Si considera poi una forza verti-cale F* di intensità unitaria, orientata verso l’alto, nel versoche si è scelto positivo nella Figura 9.11, in quello stesso sensoin cui il lavoro nello spostamento uy sarebbe positivo se lospostamento stesso risultasse verso l’alto. Per essa il momento“fittizio” è dato da
M ∗ = 1 × x = x (12.61)
quindi il valore dello spostamento verticale si può determi-nare tramite (12.56) e si ha
u y (A) = −∫ �
0
F
E Ix 2d x = − F�3
3E I(12.62)
valore calcolato tramite la linea elastica nell’Esempio 9.01.Per calcolare la rotazione in A si applica una coppia M
unitaria agente in senso antiorario in A, lo stesso senso chepermette di affermare che il lavoro 1 × q(x̄ ) è positivo quandola rotazione si sviluppa nel senso antiorario. Il momento “fit-tizio” indotto da M è pari a
M ∗ = −1 (12.63)
di conseguenza la relazione (12.59) permette di scrivere
q (A) =∫ �
0
F
E Ixd x = F�2
2E I(12.64)
L
F
BA
Figura 9.9 (ripetuta)
12.4 Il PLV nella ricerca di spostamenti 489in travi elastiche caricate trasversalmente
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

12.5 IL PLV NELL’ANALISI DI STRUTTURE ELASTICHESTATICAMENTE INDETERMINATE
Il principio dei lavori virtuali è altresì uno strumento essenziale per la de-terminazione delle reazioni “sovrabbondanti” nelle strutture staticamenteindeterminate.
Nella procedura descritta nel seguito, detta metodo delle forze, si con-sidera come campo di spostamenti e deformazioni quello reale (nel qualesi fanno comparire come incognite iperstatiche le reazioni vincolari so-vrabbondanti) e tanti sistemi fittizi equilibrati quante sono le incogniteiperstatiche. I passi della procedura sono descritti nel seguito.
La procedura è basata sulla formulazione 1. del PLV ed è esemplifi-cata nel seguito.
(a) Si sopprime un numero di vincoli (esterni o interni) pari al numerodei vincoli sovrabbondanti della struttura, sostituendo a essi le rea-zioni vincolari incognite. È essenziale che la scelta dei vincoli da sop-primere sia tale che, una volta tolti, la struttura risultante sia statica-mente determinata (isostatica). È anche essenziale verificare che ivincoli rimanenti siano ben posti e che nessuna parte della strutturasi riduca a meccanismo. La struttura resa così isostatica viene dettastruttura principale. La struttura reale è del tutto equivalente alla strut-tura principale caricata dalle forze esterne e dalle incognite iperstati-che, ove siano soddisfatte le condizioni imposte dai vincoli soppressi:imponendo queste ultime, che sono condizioni di congruenza, si ot-tengono tante equazioni (che con le ipotesi introdotte sono lineari)quante sono le incognite e si ha quindi un sistema che – salvo casidegeneri – ammette una e una sola soluzione.
490
ESEMPIO 12.05
Determinare lo spostamento in mezzeria della trave AB di-scussa nell’Esempio 9.02 (cioè nel punto indicato con C nellaFigura 9.15, punto posto a distanza 1
2� da A). La trave AB halunghezza �, è incernierata in A e appoggiata su di un carrelloin B; un carico uniforme trasversale è applicato da A a B e haintensità unitaria p (si veda la Figura 9.12 e si tenga conto dicome la lunghezza della trave e il carico trasversale siano in-dicati qui con lettere differenti).
Il momento reale lungo l’asse della trave è dato dalla For-mula (9.12) che qui si riscrive con le notazioni tipiche di que-sto capitolo:
M = 1
2p�x − 1
2px 2 (12.65)
Si applichi ora in C una forza F* verticale, di intensità uni-taria, diretta verso l’alto, lo stesso verso che (nelle conven-zioni adottate in precedenza sui versi positivi) renderebbe po-sitivo il termine sinistro della (12.53) e quindi della (12.56)se lo spostamento in C avvenisse verso l’alto. Il momento vir-tuale (fittizio) M* è dato quindi da
M ∗ ={−1× x
2 = − x2 per 0 ≤ x ≤ �
2 ,
−1×(
�2 − x
)=−
(�2 − x
)per �
2 < x ≤ �
(12.66)
di conseguenza dalla (12.56) si ottiene
u y (C ) =∫ �
0M ∗ M
E Id x =
= − 2
E I
∫ �2
0
(1
2p�x − 1
2px 2
)x
2d x =
= − 2 p�4
E I
(1
96− 1
256
)= − 5 p�4
384
(12.67)
Lo spostamento è quindi verso il basso ed è inoltre il mas-simo spostamento della trave stessa a causa della simmetriadella struttura. È inoltre la simmetria di (12.66) che permettedi scrivere la seconda eguaglianza nella (12.67), come si puòfacilmente osservare se si svolgono pedissequamente tutti icalcoli che si sviluppano sostituendo le Relazioni (12.65) e(12.66) in (12.56).
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

(b) La struttura principale, caricata dalle sole forze esterne, viene dettaschema 0; per esso si determinano le distribuzioni di momento M 0,taglio V0 e sforzo normale N0, ove l’apice 0 indica che sono gli sforziinterni dello schema 0. In genere il contributo del taglio viene tra-scurato e tale ipotesi sarà adottata nel seguito.
(c) Per semplicità di trattazione si fa inizialmente riferimento al caso incui la struttura di partenza abbia un solo vincolo sovrabbondante, equindi si abbia una sola incognita iperstatica X; sulla struttura prin-cipale una forza esterna (o una coppia) con la direzione e il versodell’incognita iperstatica X, ma intensità unitaria. Si chiama schema1 la struttura in queste condizioni; per essa si determinano le distri-buzioni equilibrate di momento M1, taglio V1 e sforzo normale N1,ove l’apice 1 indica che sono gli sforzi interni dello schema perti-nente.
(d) Il momento flettente nella struttura reale è dato da
Mr = M0 + X M1 (12.68)
(d) Si è già osservato infatti, nel dedurre la (12.54) dalla (12.53), che, nelcaso in cui una forza concentrata (o una coppia) sia applicata a unatrave, punto per punto il valore del momento è proporzionale all’in-tensità della forza stessa, quindi il momento determinato dalla rea-zione vincolare incognita di intensità X è proporzionale ad M1 tramiteX, che è l’incognita da determinare. È inoltre possibile esprimere ilmomento totale Mr come somma di quello dovuto ai carichi esterniM0 e del momento XM1 indotto da X perché si può applicare il prin-cipio di sovrapposizione degli effetti.
(e) Per ottenere l’equazione di congruenza che fornisce l’incognita X siapplica il PLV al campo congruente di spostamenti e deformazionireali e al sistema fittizio equilibrato, costituito dallo schema 1. Se ilvincolo sopresso è rigido, il lavoro virtuale esterno compiuto dallaforza X = 1 è nullo mentre nel lavoro interno compaiono M1 e N1 checompiono lavoro nella deformazione reale della trave. Pertanto, ipo-tizzando, come già fatto nel Paragrafo 12.4, che l’unica deformazionesignificativa sia quella flessionale, la (12.37) diventa∫ �
0M1 Mr
E Idx = 0 (12.69)
(e) L’incognita iperstatica compare esplicitamente nella (12.69) se per Mr
si introduce l’espressione (12.68). Nel caso in cui vi sia nella strut-tura reale un cedimento del vincolo, cedimento che può essere ela-stico o anelastico, il lavoro esterno della forza X = 1 è diverso da zeroe la (12.37) fornisce la relazione
Lev −
∫ �
0M1 Mr
E Idx = 0 (12.70)
(e) che estende la (12.69) al caso in cui il vincolo soppresso non sia ri-gido.
(f) Laddove i vincoli sovrabbondanti siano più d’uno e le incognite iper-statiche siano per esempio s, il momento reale sulla struttura è pari a
Mr = M0 +s∑
i=1
Xi Mi (12.71)
12.5 Il PLV nell’analisi di strutture 491elastiche staticamente indeterminate
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
(g) e si scrivono s equazioni (12.69), la i-esima di esse data da
∫ �
0Mi 1
E I
(M0 +
s∑i=1
Xi Mi
)dx = 0 (12.72)
(g) Si ottiene così un sistema di equazioni algebriche che permette di de-terminare le Xi. Nel caso in cui uno o più vincoli soppressi non sianorigidi, è necessario modificare la (12.72) introducendo, come nella(12.70), il lavoro esterno Le
v(Xi ) che la forza (o la coppia) unitariaXi = 1 compie nello spostamento reale del suo punto di applicazione.
(g) Ove vi sia contributo della deformabilità assiale, è necessario consi-derare l’integrale
∫ �
0
(N 1 Nr
E A+ M1 Mr
E I
)dx (12.73)
in luogo del membro destro della (12.69). In questo caso Nr è lo sforzonormale reale ed è dato da
Nr = N 0 + X N 1 (12.74)
per le stesse ragioni che portano a scrivere la (68). Nella (12.74) N1
è lo sforzo normale della forza unitaria inserita nello schema fittizioal posto dell’incognita iperstatica di intensità incognita X. Nel caso incui siano presenti s incognite iperstatiche si ha
Nr = N 0 +s∑
i=1
XiJ N i (12.75)
e ovviamente, anche in questo caso, si scrivono s equazioni (12.69),la i-esima di esse data da
∫ �
0
N i
E A
(N 0 +
s∑i=1
Xi N i
)+ Mi
E I
(M0 +
s∑i=1
Xi Mi
)dx = 0 (12.76)
ove i vincoli soppressi siano tutti rigidi. Nel caso in cui uno o più vin-coli soppressi non siano rigidi, la (12.76) deve essere modificata nelsenso della (12.70).
Nel caso in cui la deformabilità dovuta allo scorrimento non sia trascu-rabile, la generalizzazione delle relazioni precedenti è immediata: si deb-bono aggiungere termini del tipo V 1V r/(G A), con V r lo sforzo di taglioreale dato da V r = V 0 + X V 1.
492 Il Principio dei Lavori Virtuali e le sue applicazioni
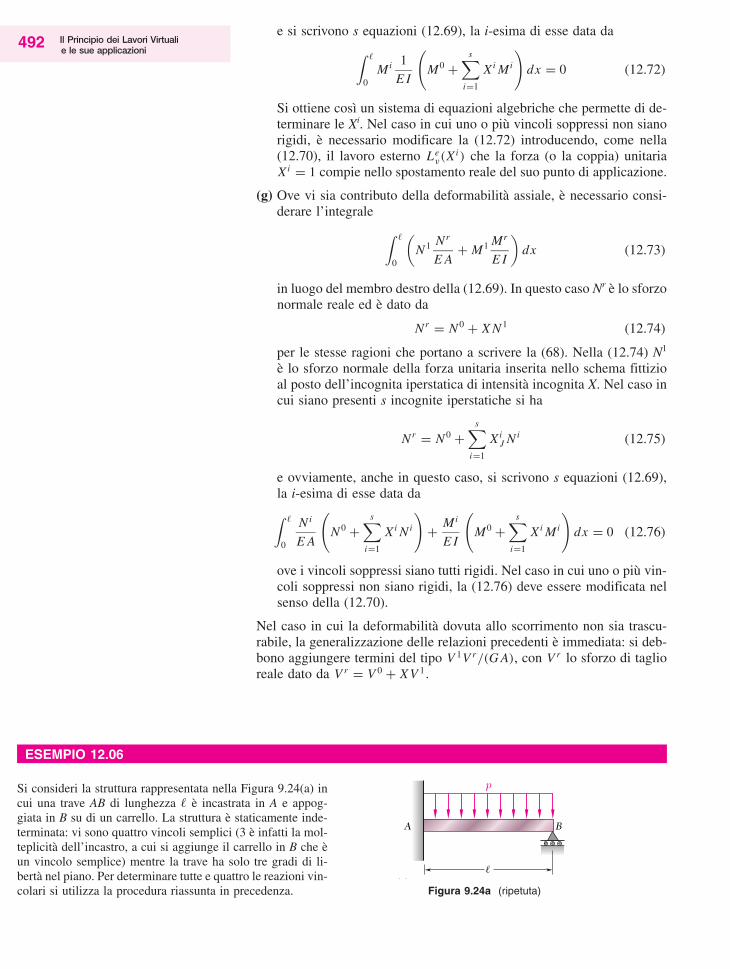
ESEMPIO 12.06
Si consideri la struttura rappresentata nella Figura 9.24(a) incui una trave AB di lunghezza � è incastrata in A e appog-giata in B su di un carrello. La struttura è staticamente inde-terminata: vi sono quattro vincoli semplici (3 è infatti la mol-teplicità dell’incastro, a cui si aggiunge il carrello in B che èun vincolo semplice) mentre la trave ha solo tre gradi di li-bertà nel piano. Per determinare tutte e quattro le reazioni vin-colari si utilizza la procedura riassunta in precedenza.
B
p
A
�
( )Figura 9.24a (ripetuta)
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
493
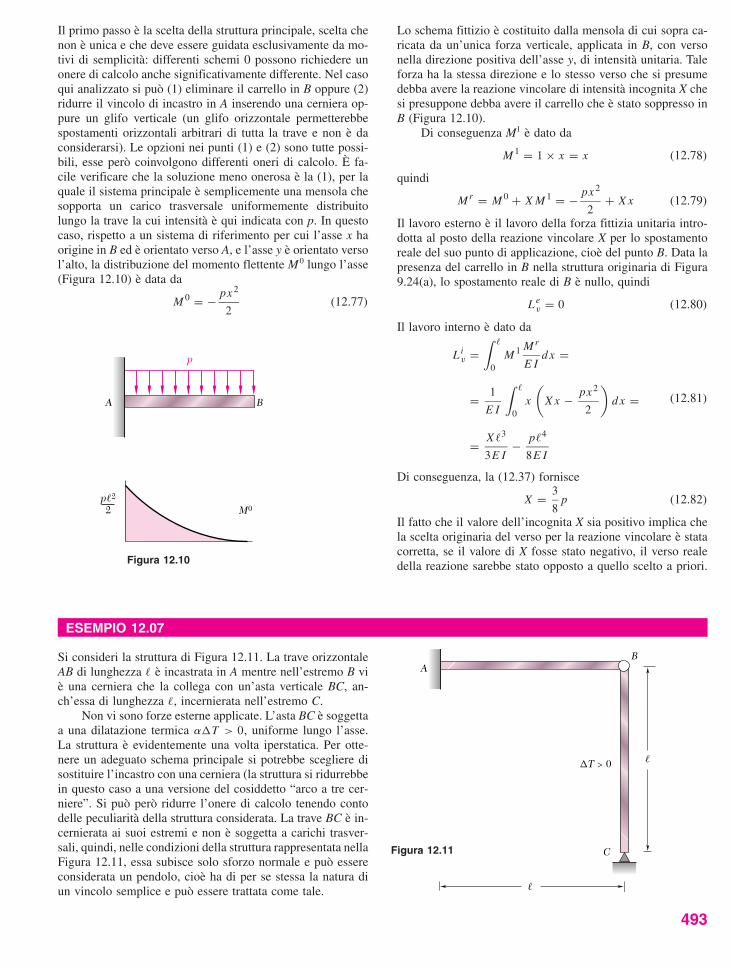
Il primo passo è la scelta della struttura principale, scelta chenon è unica e che deve essere guidata esclusivamente da mo-tivi di semplicità: differenti schemi 0 possono richiedere unonere di calcolo anche significativamente differente. Nel casoqui analizzato si può (1) eliminare il carrello in B oppure (2)ridurre il vincolo di incastro in A inserendo una cerniera op-pure un glifo verticale (un glifo orizzontale permetterebbespostamenti orizzontali arbitrari di tutta la trave e non è daconsiderarsi). Le opzioni nei punti (1) e (2) sono tutte possi-bili, esse però coinvolgono differenti oneri di calcolo. È fa-cile verificare che la soluzione meno onerosa è la (1), per laquale il sistema principale è semplicemente una mensola chesopporta un carico trasversale uniformemente distribuitolungo la trave la cui intensità è qui indicata con p. In questocaso, rispetto a un sistema di riferimento per cui l’asse x haorigine in B ed è orientato verso A, e l’asse y è orientato versol’alto, la distribuzione del momento flettente M0 lungo l’asse(Figura 12.10) è data da
M 0 = − px 2
2(12.77)
Lo schema fittizio è costituito dalla mensola di cui sopra ca-ricata da un’unica forza verticale, applicata in B, con versonella direzione positiva dell’asse y, di intensità unitaria. Taleforza ha la stessa direzione e lo stesso verso che si presumedebba avere la reazione vincolare di intensità incognita X chesi presuppone debba avere il carrello che è stato soppresso inB (Figura 12.10).
Di conseguenza M1 è dato da
M 1 = 1 × x = x (12.78)
quindi
M r = M 0 + X M 1 = − px 2
2+ X x (12.79)
Il lavoro esterno è il lavoro della forza fittizia unitaria intro-dotta al posto della reazione vincolare X per lo spostamentoreale del suo punto di applicazione, cioè del punto B. Data lapresenza del carrello in B nella struttura originaria di Figura9.24(a), lo spostamento reale di B è nullo, quindi
Lev = 0 (12.80)
Il lavoro interno è dato da
Liv =
∫ �
0M 1 M r
E Id x =
= 1
E I
∫ �
0x
(X x − px 2
2
)d x =
= X�3
3E I− p�4
8E I
(12.81)
Di conseguenza, la (12.37) fornisce
X = 3
8p (12.82)
Il fatto che il valore dell’incognita X sia positivo implica chela scelta originaria del verso per la reazione vincolare è statacorretta, se il valore di X fosse stato negativo, il verso realedella reazione sarebbe stato opposto a quello scelto a priori.
B
p
A
p�2
2 M0
Figura 12.10
ESEMPIO 12.07
B
C
A
�
��T > 0
Figura 12.11
Si consideri la struttura di Figura 12.11. La trave orizzontaleAB di lunghezza � è incastrata in A mentre nell’estremo B viè una cerniera che la collega con un’asta verticale BC, an-ch’essa di lunghezza �, incernierata nell’estremo C.
Non vi sono forze esterne applicate. L’asta BC è soggettaa una dilatazione termica a�T > 0, uniforme lungo l’asse.La struttura è evidentemente una volta iperstatica. Per otte-nere un adeguato schema principale si potrebbe scegliere disostituire l’incastro con una cerniera (la struttura si ridurrebbein questo caso a una versione del cosiddetto “arco a tre cer-niere”. Si può però ridurre l’onere di calcolo tenendo contodelle peculiarità della struttura considerata. La trave BC è in-cernierata ai suoi estremi e non è soggetta a carichi trasver-sali, quindi, nelle condizioni della struttura rappresentata nellaFigura 12.11, essa subisce solo sforzo normale e può essereconsiderata un pendolo, cioè ha di per se stessa la natura diun vincolo semplice e può essere trattata come tale.
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

12.6 IL PLV NELLA RICERCA DI SPOSTAMENTI IN STRUTTUREELASTICHE STATICAMENTE INDETERMINATE
Per trovare spostamenti o rotazioni di sezioni di strutture iperstatiche sipuò procedere in maniera del tutto analoga a quanto descritto nel Para-grafo 12.4. È necessario trovare innanzitutto le incognite iperstatiche equindi gli sforzi interni dati dalle (12.71), (12.75); si applica poi il caricoesploratore corrispondente alla grandezza che si vuole determinare e siimpone la (12.52) o la (12.54).
Da notare che per la validità del PLV il campo di sforzi interni deveessere soltanto equilibrato: si può quindi utilizzare uno qualsiasi tra gliinfiniti campi equilibrati della struttura iperstatica. Per economia di cal-coli, spesso si sceglie il campo ottenuto imponendo il carico esploratoresulla struttura principale, che è stato già utilizzato nella ricerca delle in-cognite iperstatiche attraverso il sistema (12.72) o quello dato da (12.76),oppure le loro modifiche necessarie in presenza di vincoli non rigidi.
Di conseguenza,
M r = X M 1 (12.85)
e il lavoro interno è dato da
Liv =
∫ �
0
X
E Ix 2d x = X�3
3E I(12.86)
Lo spostamento del punto B della struttura reale non è nulloperché, contrariamente ai casi discussi in precedenza, il vin-colo B non è rigido, ma si sposta per la deformazione del pen-dolo BC, e precisamente subisce (a) uno spostamento elasticodovuto alla compressione esercitata da X e dato da X�/(EA)
(cioè dall’integrale da B a C della deformazione assialeX/(E A)) e (b) uno spostamento dovuto alla dilatazione ter-mica e pari a a�T � (anche qui si tratta dell’integrale delladeformazione termica costante a�T , con α il coefficiente didilatazione termica, lungo la trave). Per il principio di so-vrapposizione degli effetti, lo spostamento totale del punto Bè quindi pari a
u y (B) = a�T � − X�
EA(12.87)
Il segno meno è dovuto al fatto che sul pendolo agisce la forzauguale e opposta all’incognita iperstatica (per assicurare lecondizioni di equilibrio) e quindi essa comprime il pendolodando luogo a un accorciamento. La variazione positiva ditemperatura provoca invece una dilatazione del pendolo.
Il lavoro esterno della forza X = 1 agente in B è quindipari a
−1 ×(a�T � − X�
EA
)(12.88)
Infine la (12.37) fornisce
X = a�T
1
EA+ �2
3EI
(12.89)
494
La struttura principale più vantaggiosa dal punto di vista deicalcoli è quindi costituita dalla sola trave AB incastata in A.L’incognita iperstatica X è la reazione che il pendolo BC eser-cita in B e che coincide inoltre con lo sforzo normale in BC.Lo schema 0 è dato dalla sola mensola AB priva di qualsiasicarico esterno, quindi
M 0 = 0 (12.83)
Lo schema 1 è rappresentato in Figura 12.12. La distribuzionedel momento M1, rispetto a un sistema di riferimento in cuil’origine dell’asse x coincide con B, è data da
M 1 = 1 × x = x (12.84)
B
C
A
�
�
11
Figura 12.12
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
RIEPILOGODEL CAPITOLO 12
In questo breve capitolo si è introdotto un principio generale della Mec-canica, il Principio dei Lavori Virtuali (PLV), e si è mostrato come essopuò essere usato per risolvere vari problemi. Per semplicità, si è limi-tata la trattazione a solidi con una dimensione prevalente (travi) e aproblemi piani, ma gli esercizi proposti ne consentono l’ estensione aproblemi nello spazio.
Nel Paragrafo 12.02 si è enunciato il Principio per atti di moto rigidoed è stato mostrato come esso può essere utilizzato per trovare le rea-zioni vincolari e gli sforzi interni in strutture isostatiche.
Il PLV è stato esteso ad atti di moto che comprendono deformazioninel Paragrafo 12.03, e nel Paragrafo 12.04 si è quindi mostrato comein questa forma esso può essere usato per trovare spostamenti e rota-zioni in punti di travi elastiche.
Infine, nei Paragrafi 12.05 e 12.06 si sono trattate travi staticamenteindeterminate (o iperstatiche) e si è mostrato come esse possono es-sere affrontate mediante il PLV.
Riepilogo del Capitolo 12 495
PLV per atti di moto rigido
PLV per atti di moto deformativo
Il PLV e le strutture iperstatiche
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

ESERCIZI RELATIVI AI PARAGRAFI 12.1-12.2
Molti degli esercizi dei Capitoli 1, 2, 3, 5, 9, 11 possono essere affrontati erisolti mediante il Principio dei Lavori Virtuali (PLV), talvolta con unnotevole risparmio di tempo. Nel seguito se ne indicano soltanto alcuni; perle eventuali soluzioni fare riferimento ai singoli capitoli.
12.1, 12.2, 12.3, 12.4 e 12.5 Risolvere utilizzando il PLV gli Esercizi1.4, 1.6, 1.7, 1.8, 1.9 (Suggerimento: sopprimere un collegamento e proiettare lacorrispondente reazione incognita sulla direzione dello spostamento del suo puntodi applicazione.)
12.6, 12.7, 12.8, 12.9, 12.10, 12.11, 12.12, 12.13, 12.14 e 12.15 Uti-lizzando ripetutamente il PLV, disegnare per punti i diagrammi del taglio e delmomento flettente nelle travi degli Esercizi 5.1, 5.2, 5.3, 5.4, 5.5, 5.6, 5.13, 5.14,5.15, 5.16.
12.16 Utilizzando il PLV, determinare la coppia torcente (a) nell’ incastroA dell’Esercizio 3.16 e (b) nell’ incastro D dell’Esercizio 3.18 (Suggerimento: sop-primere il vincolo alla rotazione nell’incastro e sostituirlo con la coppia incognita.)
ESERCIZI RELATIVI AI PARAGRAFI 12.3-12.4
12.17, 12.18, 12.19, 12.20, 12.21, 12.22 e 12.23 Utilizzando il PLV,rispondere alle domande (b) e (c) degli Esercizi 9.1, 9.2, 9.3, 9.4, 9.6, 9.7.
12.24, 12.25, 12.26 e 12.27 Risolvere, utilizzando il PLV, gli Esercizi8.10, 8.11, 8.13, 8.18.
12.28, 12.29 e 12.30 Risolvere, utilizzando il PLV, gli Esercizi 2.19, 2.35,2.36 (Suggerimento: tener conto del lavoro interno dovuto all’ allungamento de-gli elementi interessati.)
12.31 Risolvere, utilizzando il PLV, l’Esercizio 2.40.
12.32 Scrivere l’espressione del lavoro interno in un albero omogeneo disezione costante, soggetto al momento torcente T, con modulo di rigidità G e se-zione (a) circolare piena di raggio c, (b) circolare cava con raggio interno c1 edesterno c2, (c) quadrata b × b, (d) rettangolare b × 2b, (e) rettangolare b × 10b.
12.33 Risolvere, utilizzando il PLV, l’Esercizio 3.119 (Suggerimento: te-ner conto del lavoro interno connesso con la deformazione torsionale.)
ESERCIZI496 Esercizi
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
ESERCIZI RELATIVI AI PARAGRAFI 12.5-12.6
12.34, 12.35, 12.36, 12.37, 12.38 e 12.39 Risolvere, utilizzando il PLV,gli Esercizi 9.14, 9.15, 9.16, 9.17, 9.40, 9.41.
12.40 Utilizzando il PLV, rispondere alla domanda (a) degli Esercizi 3.51e 3.52 (Suggerimento: eliminare il vincolo alla rotazione in uno dei due supporti,e tener conto del lavoro interno connesso con la deformazione torsionale.)
ESERCIZI DI RIEPILOGO
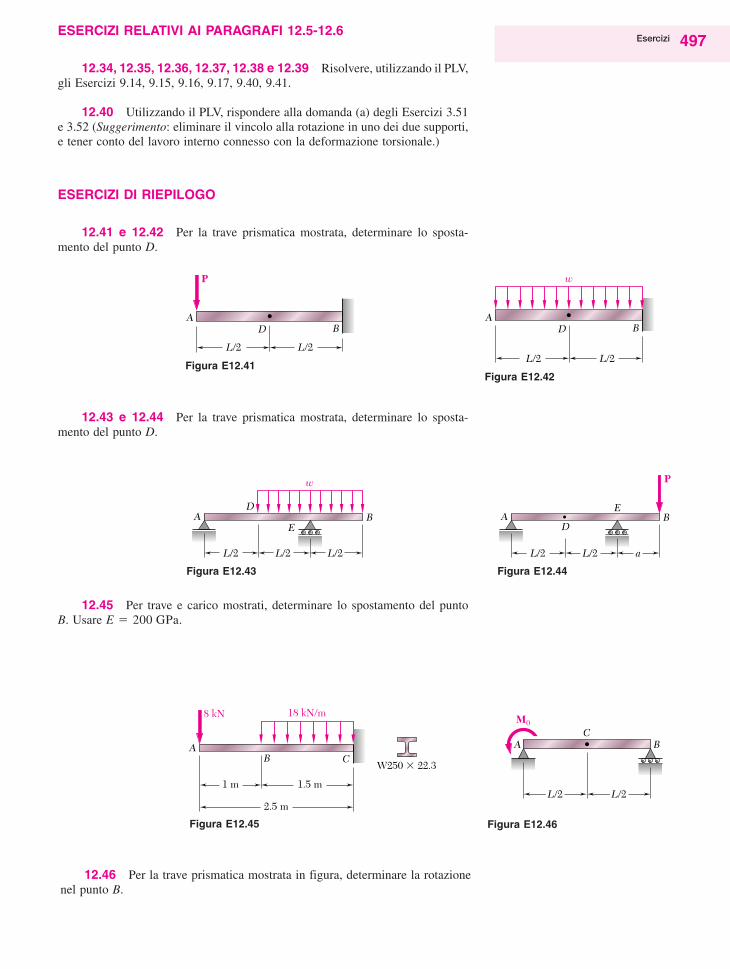
12.41 e 12.42 Per la trave prismatica mostrata, determinare lo sposta-mento del punto D.
BD
L/2 L/2
A
P
L/2 L/2
BA
D
w
Figura E12.41Figura E12.42
BE
DA
L/2 aL/2
P
BE
D
w
A
L/2L/2L/2
8 kN
AC
18 kN/m
B
1 m 1.5 m
2.5 m
W250 � 22.3
Figura E12.43 Figura E12.44
Figura E12.45
M0
A BC
L/2 L/2
Figura E12.46
12.46 Per la trave prismatica mostrata in figura, determinare la rotazionenel punto B.
12.45 Per trave e carico mostrati, determinare lo spostamento del puntoB. Usare E � 200 GPa.
12.43 e 12.44 Per la trave prismatica mostrata, determinare lo sposta-mento del punto D.
Esercizi 497
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl

498 Esercizi
1.5 m
2 m
210 kN
1200 mm2
1800 mm2
A
C
B
1.5 m
2.5 m
1.6 m
1.2 m
1.2 m
4.8 kN
CD
B
A
Figura E12.51 ed E12.52 Figura E12.53 ed E12.54
B
D
C
0.75 m
0.75 m
6 ft
200 kN
350 kN3870 mm2
1930 mm2
2580 mm2
Figura E12.49 ed E12.50
ACB
0.6 m 0.9 m
40 mm
80 mm
5 kN/m
4 kN
Figura E12.47
BC
160 kN
A
2.4 m 2.4 m
4.8 m
W310 � 74
Figura E12.48
12.53 e 12.54 Gli elementi della struttura reticolare mostrata sono tuttidi acciaio ed hanno sezione trasversale di area 500 mm2. Usando E = 200 GPadeterminare lo spostamento indicato.4
12.53 Lo spostamento verticale della cerniera B.12.54 Lo spostamento orizzontale della cerniera B.
12.48 Per trave e carico mostrati, determinare la rotazione nell’estremo A.Usare
12.49 e 12.50 Ciascun elemento della struttura reticolare mostrata in fi-gura è realizzato in acciaio e ha sezione trasversale di area come indicato. Uti-lizzando E = 200 GPa, determinare gli spostamenti indicati.4
12.49 Lo spostamento verticale della cerniera C.12.50 Lo spostamento orizzontale della cerniera C.
12.51 e 12.52* Gli elementi della struttura reticolare mostrata sono tuttidi acciaio e hanno sezione trasversale dell’area mostrata. Usando determinare lo spostamento indicato.4
12.51 Lo spostamento verticale della cerniera C.12.52* Lo spostamento orizzontale della cerniera C.
E � 200 GPa,
E � 200 GPa.
12.47 Per la trave e il carico mostrati in figura, determinare lo spostamentodel punto B. Utilizzare E � 200 GPa.
4 Negli Esercizi 12.49-12.54 e 12.58-12.63, usare una formula analoga alla (12.54), ottenutaponendo M∗ = V ∗ = 0 nella (12.52).
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl
Esercizi 499
C
l
l
B
A
P
Figura E12.55
P
l
CD
� �
E
B
P
DC
34
EB
l
l
Figura E12.58
Figura E12.60
P
45�
C
DR
EB
Figura E12.59
P
BD
A C
l
l
30�
Figura E12.61
l
l34
C
ED
A B
P l
l34
C
ED
AB
P
Figura E12.62 Figura E12.63
C
PD
l
l
A
B
Figura E12.56
P
L
L
CB
A
60�
Figura E12.57
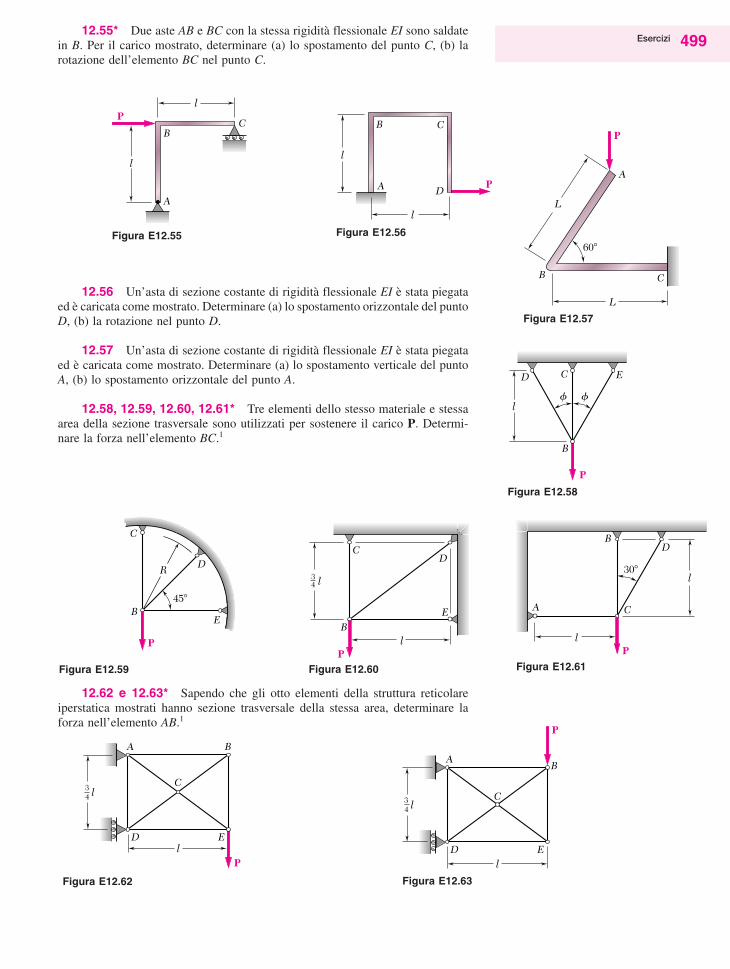
12.55* Due aste AB e BC con la stessa rigidità flessionale EI sono saldatein B. Per il carico mostrato, determinare (a) lo spostamento del punto C, (b) larotazione dell’elemento BC nel punto C.
12.62 e 12.63* Sapendo che gli otto elementi della struttura reticolareiperstatica mostrati hanno sezione trasversale della stessa area, determinare laforza nell’elemento AB.1
12.56 Un’asta di sezione costante di rigidità flessionale EI è stata piegataed è caricata come mostrato. Determinare (a) lo spostamento orizzontale del puntoD, (b) la rotazione nel punto D.
12.57 Un’asta di sezione costante di rigidità flessionale EI è stata piegataed è caricata come mostrato. Determinare (a) lo spostamento verticale del puntoA, (b) lo spostamento orizzontale del punto A.
12.58, 12.59, 12.60, 12.61* Tre elementi dello stesso materiale e stessaarea della sezione trasversale sono utilizzati per sostenere il carico P. Determi-nare la forza nell’elemento BC.1
Meccanica dei solidi - Elementi di scienza delle costruzioni 4/ed Ferdinand P. Beer, E. Russell Johnston Jr., John T. DeWolf, David F. Mazurek Copyright © 2010 - The McGraw-Hill Companies srl