Il calcolo delle ruote dentate(fatica)-4.prn - Politecnico di...
14
13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 13 4 Calcolo a fatica 4.1 Normativa UNI 8862 – Resistenza a flessione Per quanto riguarda il calcolo a fatica per flessione delle ruote di ingranaggi la normativa UNI 8862 (1987) fa riferimento alla condizione di resistenza a rottura del dente tramite la relazione: FP F s s ≤ (17) dove F s è la tensione equivalente al piede del dente nel punto più sollecitato (tensione effettiva) espressa nel modo seguente: σ ε β β α F t n Fa Sa A V F F F bm y y y y K K K K = ( ) (18) ed è una tensione calcolata che dipende dalla forza tangenziale t F (forza media di funzionamento), dalla larghezza di fascia b, dal modulo normale n m e da una serie di fattori (parametri relativi all’ingranaggio e parametri relativi al funzionamento). La tensione FP s è detta tensione ammissibile , ma è calcolata in modo completamente diverso dalla tensione ammissibile del calcolo statico. Essa infatti vale: σ σ δ FP F ST NT F relT RrelT X y y S y y y = lim min (19) ed è funzione della tensione limite di fatica del materiale lim F s , del fattore di sicurezza minimo alla flessione min F S e di una serie di coefficienti (parametri relativi alla fatica) che correggono il limite di fatica del materiale, uno dei quali, il fattore di durata NT Y , rappresenta la curva di Wöhler del componente . I parametri relativi all’ingranaggio sono: y Fa fattore di forma del dente, y Sa fattore di correzione della tensione , y e fattore del rapporto di condotta, y b fattore dell’angolo d’elica, e tengono conto degli effetti della geometria del dente sulla massima tensione equivalente che si realizza nel materiale. In particolare: y Fa è il fattore di forma e tiene conto dell’effetto della geometria del dente sulla tensione nominale di flessione; è calcolabile analiticamente tramite la relazione seguente: n n Fn an n Fa Fa m s m h Y a a cos cos 6 2 = (20) che è analoga a quella relativa al calcolo del fattore di forma y Lw (secondo Lewis) (4); in questo caso, però, si tiene conto dell’effettivo angolo di inclinazione g della forza globale F
Transcript of Il calcolo delle ruote dentate(fatica)-4.prn - Politecnico di...

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 13
4 Calcolo a fatica 4.1 Normativa UNI 8862 – Resistenza a flessione Per quanto riguarda il calcolo a fatica per flessione delle ruote di ingranaggi la normativa UNI 8862 (1987) fa riferimento alla condizione di resistenza a rottura del dente tramite la relazione: FPF σσ ≤ (17) dove Fσ è la tensione equivalente al piede del dente nel punto più sollecitato (tensione effettiva) espressa nel modo seguente:
σ ε β β αFt
nFa Sa A V F F
Fb m
y y y y K K K K=⋅
⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅( ) (18)
ed è una tensione calcolata che dipende dalla forza tangenziale tF (forza media di funzionamento), dalla larghezza di fascia b, dal modulo normale nm e da una serie di fattori (parametri relativi all’ingranaggio e parametri relativi al funzionamento). La tensione FPσ è detta tensione ammissibile, ma è calcolata in modo completamente diverso dalla tensione ammissibile del calcolo statico. Essa infatti vale:
σσ
δFPF ST NT
FrelT RrelT X
y yS
y y y=⋅ ⋅
⋅ ⋅ ⋅lim
min
(19)
ed è funzione della tensione limite di fatica del materiale limFσ , del fattore di sicurezza minimo alla flessione minFS e di una serie di coefficienti (parametri relativi alla fatica) che correggono il limite di fatica del materiale, uno dei quali, il fattore di durata NTY , rappresenta la curva di Wöhler del componente. I parametri relativi all’ingranaggio sono: yFa fattore di forma del dente, ySa fattore di correzione della tensione , yε fattore del rapporto di condotta, yβ fattore dell’angolo d’elica, e tengono conto degli effetti della geometria del dente sulla massima tensione equivalente che si realizza nel materiale. In particolare: Ø yFa è il fattore di forma e tiene conto dell’effetto della geometria del dente sulla tensione
nominale di flessione; è calcolabile analiticamente tramite la relazione seguente:
nn
Fn
ann
Fa
Fa
ms
mh
Y
α
α
cos
cos6
2
= (20)
che è analoga a quella relativa al calcolo del fattore di forma yLw (secondo Lewis) (4); in questo caso, però, si tiene conto dell’effettivo angolo di inclinazione γ della forza globale F

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 14
scambiata fra i denti (con anαγ = ) riferito alla sezione normale del dente (che ovviamente coincide con quella frontale nel caso di ruote a denti dritti) (Figura 6). La sezione più sollecitata secondo la normativa è individuata da due rette inclinate di 30° rispetto all’asse di simmetria del dente (aventi origine nel punto di intersezione fra l’asse di simmetria e la retta dei contatti) e tangenti al profilo ad evolvente (Figura 7) (mentre nel calcolo di Lewis si faceva riferimento al punto di tangenza con la parabola di uniforme resistenza (Figura 6)).
Figura 6 – Inclinazione della forze scambiata fra i denti
Figura 7 – Rette che individuano la sezione più sollecitata alla base del dente
Il valore di yFa è anche facilmente leggibile da diagrammi forniti dalla normativa (diversi a seconda della tipologia della dentiera di riferimento) in funzione del numero di denti virtuale vz (9).
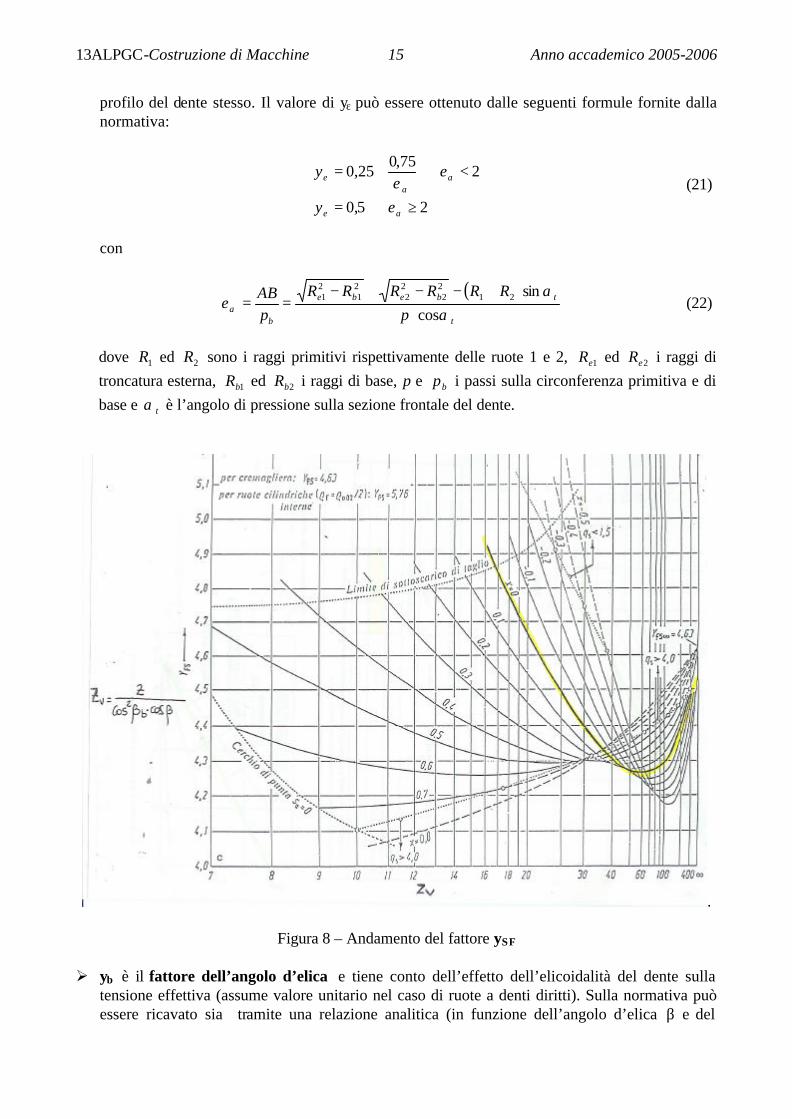
Ø ySa è il fattore di correzione della tensione nominale di flessione e tiene conto delle concentrazioni di tensione al piede del dente e del fatto che la tensione effettiva non è dovuta solo alla flessione. Il calcolo analitico di tale fattore è piuttosto complicato e presenta molti casi particolari che sono descritti dalla normativa; se non si necessita di particolare precisione il valore di ySa può essere agevolmente ricavato da diagrammi forniti dalla normativa stessa ed esattamente analoghi a quelli utilizzati per il calcolo di yFa. In sostituzione dei fattori yFa e ySa si può utilizzare il prodotto dei due, indicato in letteratura [3] come fattore ySF ; questo fattore è impiegato per il calcolo della tensione equivalente al piede del dente ed è diagrammato in funzione del numero di denti Z (o ZV nel caso di ruote a denti elicoidali) (Figura 7).
Ø yε è il fattore del rapporto di condotta e tiene conto del fatto che, se ci sono più di due denti in presa contemporaneamente, nelle condizioni di massima tensione al piede la forza non è applicata in testa al dente (condizione per cui sono calcolati yFa e ySa), ma in un altro punto del
F
W
αan
sFn
hFa
Ft αn
x
Parabola di uniforme resistenza
13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 15
profilo del dente stesso. Il valore di yε può essere ottenuto dalle seguenti formule fornite dalla normativa:
≥⇔=
<⇔+=
25,0
275,0
25,0
αε
αα
ε
ε
εε
y
y (21)
con
( )
t
tbebe
b pRRRRRR
pAB
αα
εα cossin21
22
22
21
21
⋅+−−+−
== (22)
dove 1R ed 2R sono i raggi primitivi rispettivamente delle ruote 1 e 2, 1eR ed 2eR i raggi di troncatura esterna, 1bR ed 2bR i raggi di base, p e bp i passi sulla circonferenza primitiva e di base e tα è l’angolo di pressione sulla sezione frontale del dente.
.
Figura 8 – Andamento del fattore ySF
Ø yβ è il fattore dell’angolo d’elica e tiene conto dell’effetto dell’elicoidalità del dente sulla tensione effettiva (assume valore unitario nel caso di ruote a denti diritti). Sulla normativa può essere ricavato sia tramite una relazione analitica (in funzione dell’angolo d’elica β e del

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 16
coefficiente di ricoprimento εβ), sia tramite un diagramma (sempre in funzione dell’angolo d’elica β e del coefficiente di ricoprimento εβ) (Figura 9).
I parametri relativi al funzionamento sono: KA fattore di applicazione del carico; KV fattore dinamico; KFβ fattore di distribuzione longitudinale del carico (o di disallineamento); KFα fattore di distribuzione trasversale del carico.
Figura 9 - Andamento del fattore yβ
Nel caso più generale è necessario calcolarli nell’ordine appena indicato, poiché ognuno di essi è funzione anche dei precedenti (o meglio della forza tangenziale Ft corretta). Esistono però, anche in questo caso, dei metodi di calcolo semplificati che tengono conto dei vari fattori in modo meno preciso, ma di solito accettabile se non si hanno esigenze particolari. E’ da precisare inoltre che gli effetti dinamici interni ed esterni di cui tengono conto i primi due coefficienti sono determinati in maniera piuttosto arbitraria e sarebbe preferibile, quando possibile, effettuare un calcolo più preciso della forza tangenziale Ft attraverso una analisi dinamica del sistema. Ø KA è il fattore di applicazione del carico e tiene conto dell’entità dei sovraccarichi a cui è
sottoposto il sistema per cause esterne all’ingranaggio; può essere determinato tramite una tabella in funzione dei tipi di sovraccarico che si presentano sul motore e sulla macchina operatrice (Tabella 3) (Prospetto I, [2]) .
Ø KV è il fattore dinamico e tiene conto degli effetti dovuti alle masse rotanti, e, secondo un calcolo di prima approssimazione, è funzione solo della massima velocità periferica della ruota dentata vp (velocità calcolata in corrispondenza della circonferenza primitiva). Si può, in questo caso, ottenere tramite la formula reperibile in letteratura [4]:
6,5
6,5 pV
vk
+= (23)
Per ingranaggi e condizioni di funzionamento “ordinarie” la normativa fornisce un’altra espressione analitica:
13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 17
BAKV += 1 per mmN
bF
z t 150,50min >< (24)
dove B ([B]=s/m) e A ([A]=m/s) hanno le seguenti espressioni:
100
minzvA p= )9()7,0( GcB −= (25)
essendo G il grado di precisione della ruota dentata e c una costante: ( 18,0=c per ruote a denti diritti con 9≤G e 1,0=c per ruote a denti elicoidali con 9≤G ). Se il numero di denti minimo è superiore a 50 o la forza riferita alla larghezza di fascia è inferiore al limite, bisogna usare dei KV più cautelativi di quelli calcolati, oppure svolgere una analisi dinamica completa. Inoltre, se A non supera i 3m/s, possiamo assumere valore unitario per il fattore dinamico.
Ø KFβ è il fattore di distribuzione longitudinale del carico (o di disallineamento) e tiene conto delle disuniformità di applicazione del carico lungo il dente (nel caso di mancanza di informazioni precise si può ipotizzare unitario).
Ø KFα è il fattore di distribuzione longitudinale del carico (o di disallineamento) e tiene conto delle disuniformità a causa di errori di passo e di profilo nell’applicazione del carico (nel caso di mancanza di informazioni precise si può ipotizzare unitario).
Tabella 3 – Valori del fattore di applicazione del carico KA
I parametri relativi alla fatica sono: yST fattore di correzione della tensione ; SFmin fattore di sicurezza a flessione ; yδrelT fattore relativo di sensibilità all’intaglio; yRrelT fattore relativo dello stato della superficie al piede del dente; yX fattore di dimensione ; yNT fattore di durata. Essi tengono conto delle riduzioni della tensione ammissibile per cause prettamente correlate alla fatica. In particolare: Ø yST è il fattore di correzione della tensione e tiene conto del tipo di sollecitazione (pulsante,
alternata, alternata positiva…) e si ricava utilizzando il diagramma di Smith e Goodman (Figura 10). Nel caso, ad esempio, di sollecitazione pulsante positiva si ha (come implicitamente indicato nella normativa):

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 18
222 lim0 =⇒=⇒= stFFPss yσσσσ
Ø SFmin è il fattore di sicurezza a flessione (per le sollecitazioni di fatica in generale è unitario).
Figura 10 - Diagramma di Smith e Goodman
Ø yδrelT è il fattore relativo all’intaglio e dipende dal grado di precisione tecnologica della ruota dentata (è pari a uno per ruote “tecnologicamente perfette” prese come riferimento). Si calcola come:
( )
'2,11
'212,01
ρ
ρδ +
++= s
relT
qy (26)
Figura 11 - Dentiera di riferimento
Il coefficiente ρ’ dipende dalla sensibilità intrinseca del materiale all’intaglio e si può ricavare da tabelle fornite dalla normativa; qs è detto parametro d’intaglio e può essere calcolato come:
mnπ/4
ha0
ρa0

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 19
F
Fns
sq
ρ2= (27)
Tale parametro è ottenibile conoscendo le caratteristiche della dentiera di riferimento della ruota (Figura 11); sFn ([sFn]=mm) è lo spessore del dente al piede ed è calcolabile con le formule fornite dalla normativa:
−+
−=
n
avnFn m
Gzms 0
cos3
3sin
ρϑ
ϑπ (28)
con
xmh
mG
n
a
n
a +−= 00ρ (29)
dove x è il coefficiente di spostamento del profilo della dentatura e ρF ([ρF]=mm) è il raggio di curvatura in corrispondenza della testa del dente. Le formule per il calcolo sono fornite dalla normativa:
( )GzmG
v
naF 2coscos
22
2
0 −+=
ϑϑρρ (30)
Ø yRrelT è il fattore relativo dello stato della superficie al piede del dente e dipende dal grado
di finitura superficiale nei punti di maggiore sollecitazione alla base del dente. La normativa fornisce delle espressioni analitiche del tipo:
≤→=≤≤→+−=
mRcymRmRbay
tmRrelIT
tmn
tmRrelIT
µµµ
1401)1(
(31)
dove Rtm è la rugosità media al piede del dente ([Rtm]=µm). Le costanti a, b, c, n dipendono dal materiale. La normativa fornisce anche dei grafici per un calcolo più veloce, se non si necessita di particolare precisione.
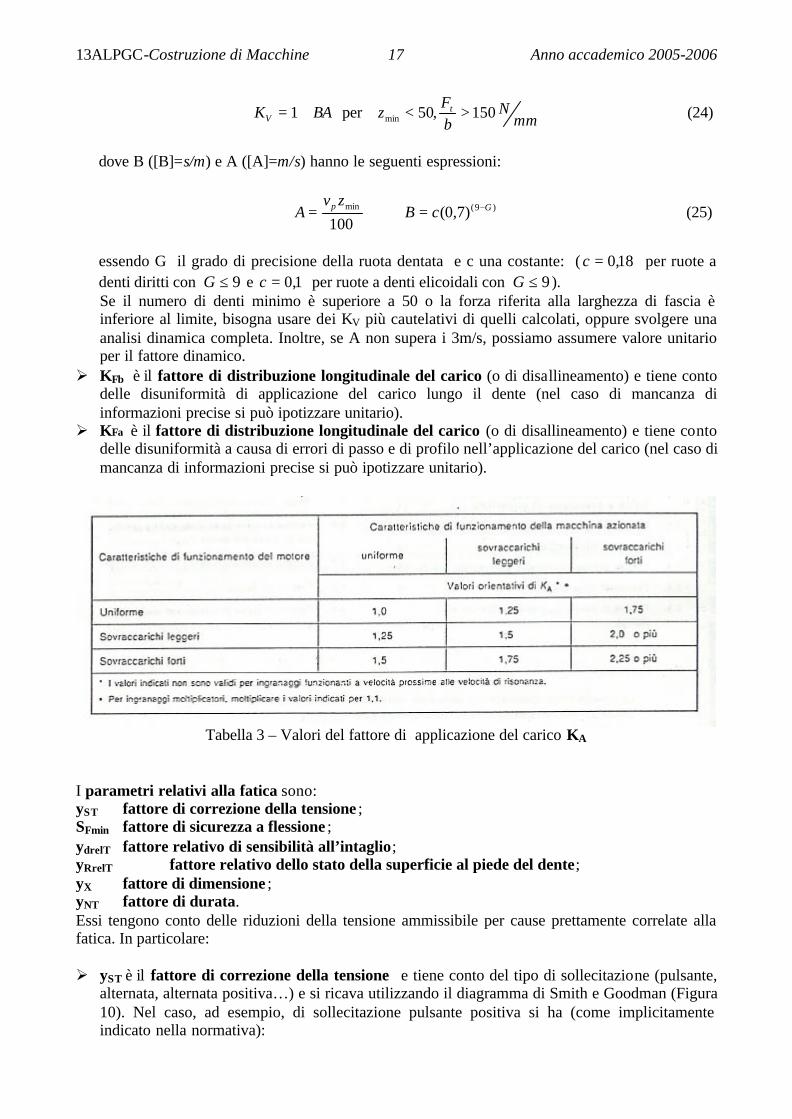
Ø yX è il fattore di dimensione e dipende dalle dimensioni della ruota. Il fattore di dimensione è
diagrammato in funzione del modulo normale e del tipo di materiale (Figura 12). Se il materiale costituente la ruota è idoneo alla dimensione della stessa ed è stato trattato in modo opportuno, si può assumere questo fattore di valore unitario.
Ø yNT è il fattore di durata o fattore della curva di Wöhler e dipende dal materiale utilizzato. Per la maggior parte dei materiali utilizzati in meccanica si può esprimere come:
>=
≤≤
=
≤=
ANT
ALv
NT
olNT
NNy
NNN
Ny
NNky
per 1
Nper
per
ol
E
(32)
dove k, Nol, NA, E sono costanti dimensionali dipendenti dal materiale e fornite dalla normativa.
13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 20
Nella normativa sono riportati gli andamenti dei fattori di durata per alcune classi di materiali (Figura 13) e sono inoltre fornite le corrispondenti relazioni analitiche. A titolo di esempio si riporta la relazione analitica del fattore di durata per gli acciai cementati, con tempra superficiale (Figura 14) (andamento della curva corrispondente illustrata in Figura 13).
Figura 12 – Fattore di dimensione yX
Figura 13 – Fattore di durata yNT
Figura 14 – Relazioni relative al fattore di durata yNT per acciai con tempra superficiale

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 21
4.2 Normativa UNI 8862 – Resistenza a pitting Per quanto riguarda il calcolo a fatica per contatto hertziano ripetuto o pitting la normativa UNI 8862 (1987) fa riferimento alla condizione di resistenza a rottura del dente tramite la relazione: HPH σσ ≤ (33) dove Hσ è la pressione di contatto (pressione di Hertz) espressa nel modo seguente:
σ ε β β αH H Et
A V H Hz z z zF
d bu
uK K K K= ⋅ ⋅ ⋅ ⋅
⋅⋅ ± ⋅ ⋅ ⋅ ⋅
1
1 (34)
ed è una tensione calcolata (come nella verifica a flessione) che dipende dalla forza tangenziale tF (forza media di funzionamento), dalla larghezza di fascia b, dal rapporto d’ingranaggio u ( )1/ 12 ≥= zzu , dal diametro primitivo della ruota più piccola 1d e da una serie di fattori (parametri relativi all’ingranaggio e parametri relativi al funzionamento). La tensione HPσ è detta pressione di contatto ammissibile (pressione di Hertz ammissibile) ed è calcolata nel seguente modo:
σσ
HPH N
HL R V W X
zS
z z z z z=⋅
⋅ ⋅ ⋅ ⋅ ⋅lim
min
(35)
dove limHσ è la pressione limite base di fatica di superficie, minHS è il fattore di sicurezza minimo al pitting e i parametri NZ , LZ , … sono i fattori relativi alla fatica; NZ è il fattore di durata e può essere considerato, analogamente al caso della fatica per flessione, come la curva di Wöhler a pitting del componente. I parametri relativi all’ingranaggio sono: zH fattore di zona; zE fattore di elasticità del materiale; zε fattore del rapporto di condotta; zβ fattore dell’angolo d’elica. e tengono conto degli effetti della geometria del dente sulla massima la pressione di contatto che si realizza nel materiale. In particolare: Ø zH è il fattore di zona ed è funzione degli angoli caratteristici delle ruote e tiene conto degli
effetti della curvatura relativa dei fianchi dei denti nel punto primitivo di ingranamento. Il fattore di zona si calcola tramite la relazione seguente:
'2
'
sincos
coscos2
tt
tbHz
αα
αβ
⋅
⋅⋅= (36)
dove gli angoli αt, αt’ (le grandezze con l’apice sono relative al funzionamento per ingranaggi tagliati con spostamento dei profili) possono essere determinati, noti, αn e β, tramite le relazioni:

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 22
tt
nt
dd
αα
βα
α
coscos
costan
tan
// =
= (37)
dove d è il diametro primitivo di riferimento e d’ quello primitivo di funzionamento. Ovviamente essi coincidono per ruote a profili non spostati, così come αt e αt’.
Ø zE è il fattore di elasticità del materiale e dipende dalle caratteristiche elastiche del materiale; si ottiene dalla relazione seguente ( 1E , 2E e 1ν , 2ν sono rispettivamente i moduli elastici e i coefficienti di Poisson delle due ruote):
−+
−=
2
22
1
21 11
1
EE
zEνν
π
(38)
Ø zε è il fattore del rapporto di condotta e dipende dal rapporto di condotta trasversale e dal
rapporto di ricoprimento ed è pari a:
( )
≥→=
<→+−−
=
=→−
=
11
113
4
03
4
βα
ε
βα
ββ
αε
αε
εε
εε
εε
ε
βε
z
z
z
Ø zβ è il fattore dell’angolo d’elica e tiene conto degli effetti dell’angolo d’elica sulla
distribuzione del carico. Si calcola tramite la relazione (ottenuta sperimentalmente):
ββ cos=z (39)
I parametri relativi al funzionamento sono: KA fattore di applicazione del carico. KV fattore dinamico. KHβ fattore di distribuzione longitudinale del carico (o di disallineamento); KHα fattore di distribuzione trasversale del carico. I parametri KA e KV sono identici a quelli calcolati per il caso della flessione. Inoltre: Ø KHβ è il fattore di distribuzione longitudinale del carico (o di disallineamento) e tiene conto
delle disuniformità di applicazione del carico lungo il dente (nel caso di mancanza di informazioni precise si può ipotizzare unitario).
Ø KHα è il fattore di distribuzione trasversale del carico e tiene conto delle disuniformità a causa di errori di passo e di profilo nell’applicazione del carico (nel caso di mancanza di informazioni precise si può ipotizzare unitario).
I parametri relativi alla fatica sono: SHmin fattore di sicurezza a pitting; ZL fattore del lubrificante;

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 23
ZR fattore di rugosità; ZV fattore di velocità; ZW fattore del rapporto fra durezze ; ZX fattore di dimensione ; ZN fattore di durata. Essi tengono conto delle riduzioni della pressione limite base di fatica di superficie per cause prettamente correlate alla fatica. In particolare: Ø SHmin è il fattore di sicurezza a pitting (in generale è unitario). Ø ZL è il fattore del lubrificante ed è funzione della viscosità cinematica del lubrificante a
temperature standard (40°C e 50°C) e della tensione limHσ . La normativa riporta delle espressioni analitiche per il calcolo e un diagramma che esprime l’andamento di ZL in funzione della viscosità (Figura 15).
Figura 15 - Fattore del lubrificante ZL
Ø ZR è il fattore di rugosità ed è funzione delle rugosità medie sui fianchi dei denti e della tensione limHσ . La normativa riporta delle espressioni analitiche per il calcolo e un diagramma che esprime l’andamento di ZR in funzione della rugosità di superficie (Figura 16).
Ø ZV è il fattore di velocità e tiene conto degli effetti della rotazione tramite la massima velocità periferica vp. La normativa riporta delle espressioni analitiche per il calcolo e un diagramma che
esprime l’andamento di ZV in funzione della velocità periferica e della tensione limHσ (Figura 17).
Ø ZW è il fattore del rapporto tra durezze e tiene conto del fatto che la resistenza di una ruota di acciaio aumenta se questa ingrana con un pignone che ha subito un indurimento superficiale e presenta una bassa rugosità sulla superficie dei denti. In prima approssimazione è funzione solo della durezza della ruota più tenera e può essere espresso tramite la relazione:

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 24
1700
1302,1
−−=
HBZW (40)
dove HB è la durezza Brinell sui fianchi della ruota. Se HB<130 oppure HB>400 si assume ZW pari a uno. In realtà altri fattori influiscono su ZW, perciò la formula analitica ci fornisce solo il valore centrale di una fascia di valori, come si può chiaramente notare dal diagramma fornito dalla normativa (Figura 18).
Ø ZX è il fattore di dimensione e dipende dalle dimensioni della ruota. Se il materiale costituente la ruota è idoneo alla dimensione della stessa ed è stato trattato in modo opportuno si può assumere valore unitario.
Ø ZN è il fattore di durata o fattore della curva di Wöhler e dipende dal materiale utilizzato. Per la maggior parte dei materiali utilizzati in meccanica si può esprimere tramite relazioni analoghe alle (32). La relazione generale per il fattore di durata è la seguente:
E
L
LVN N
NZ
=
dove NL è il numero di cicli richiesto e NLV e d E hanno i valori riportati in Figura 20. Nella normativa, infatti, sono riportati gli andamenti dei fattori di durata per alcune classi di materiali (Figura 19) e sono inoltre fornite le corrispondenti relazioni analitiche (Figura 20).
Figura 16 - Fattore di rugosità ZR

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 25
Figura 17 - Fattore di velocità ZV
Figura 18 - Fattore del rapporto fra durezze ZW

13ALPGC-Costruzione di Macchine Anno accademico 2005-2006 26
Figura 19 - Fattore di durata ZN
Figura 20 - Relazioni relative al fattore di durata ZN per acciai con tempra superficiale



![COMPORTAMENTO A FATICA DI COMPONENTI MECCANICI … · strumenti di calcolo per la modellazione FEM e multibody, è ormai realisticamente ... cicli di fatica, mentre ... Con E[P],](https://static.fdocumenti.com/doc/165x107/5c6a82eb09d3f2e4178cb59e/comportamento-a-fatica-di-componenti-meccanici-strumenti-di-calcolo-per-la-modellazione.jpg)














