Fisica generale - Marco Alessandrini · Fisica generale Meccanica, elettromagnetismo, termodinamica...
205
Fisica generale Meccanica, elettromagnetismo, termodinamica Marco Alessandrini Aprile 2010 – Marzo 2011 C.d.L. in Ingegneria Elettronica e delle Telecomunicazioni Seconda Facolt` a di Ingegneria - Sede di Cesena Universit` a degli Studi di Bologna
Transcript of Fisica generale - Marco Alessandrini · Fisica generale Meccanica, elettromagnetismo, termodinamica...
Fisica generaleMeccanica, elettromagnetismo, termodinamica
Marco AlessandriniAprile 2010 – Marzo 2011
C.d.L. in Ingegneria Elettronica e delle TelecomunicazioniSeconda Facolta di Ingegneria - Sede di Cesena
Universita degli Studi di Bologna

CC© BY:© $\© =©Quest’opera e stata rilasciata sotto la licenza Creative Commons Attribu-
zione-Non commerciale-Non opere derivate 2.5 Italia. Per leggere una copiadella licenza visita il sito web
http://creativecommons.org/licenses/by-nc-nd/2.5/it/
o spedisci una lettera a Creative Commons, 171 Second Street, Suite 300, SanFrancisco, California, 94105, USA.
E consentito riprodurre e distribuire liberamente il presente testo, senza apporvi modi-fiche e mantenendo sempre riconoscibile il nome degli autori, purche non a scopo di lucro,senza scopi commerciali (direttamente o indirettamente) e per esclusivo uso personale.
E possibile pubblicare il file o sue parti su siti internet, purche sia citato in manieraevidente l’autore.
Per qualunque informazione, problematica, suggerimento o reclamo utilizzare l’indiriz-zo marco [email protected].

Indice
I Fisica generale L-A: MECCANICA 9
1 Calcolo vettoriale 111.1 Versori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2 Operazioni vettoriali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2.1 Somma di vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2.2 Prodotto di un numero per un vettore . . . . . . . . . . . . . . . . . 111.2.3 Prodotto scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2.4 Prodotto vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2.5 Doppio prodotto misto . . . . . . . . . . . . . . . . . . . . . . . . . . 131.2.6 Rappresentazione cartesiana dei vettori . . . . . . . . . . . . . . . . 131.2.7 Derivate di un punto e di un vettore . . . . . . . . . . . . . . . . . . 14
1.3 Momento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.3.1 Momento assiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3.2 Insiemi equivalenti di vettori applicati . . . . . . . . . . . . . . . . . 15
1.4 Rotore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 Cinematica 172.1 Livelli di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.1 Posizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.1.2 Velocita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.1.3 Accelerazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2 Tipi di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2.1 Moto rettilineo uniforme . . . . . . . . . . . . . . . . . . . . . . . . . 192.2.2 Moto rettilineo uniformemente accelerato . . . . . . . . . . . . . . . 202.2.3 Moto circolare uniforme . . . . . . . . . . . . . . . . . . . . . . . . . 202.2.4 Moto armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3 Vincoli. Gradi di liberta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.4 Cinematica del corpo rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.5 Cambiamento del sistema di riferimento . . . . . . . . . . . . . . . . . . . . 23
2.5.1 Modifica del SdR per posizione . . . . . . . . . . . . . . . . . . . . . 232.5.2 Modifica del SdR per velocita . . . . . . . . . . . . . . . . . . . . . . 232.5.3 Modifica del SdR per accelerazione . . . . . . . . . . . . . . . . . . . 24
3 Statica 253.1 Principı della statica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 Vincoli e forze vincolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.1 Vincolo di un punto materiale su una linea . . . . . . . . . . . . . . 263.2.2 Vincolo di un punto materiale su una superficie . . . . . . . . . . . . 263.2.3 Vincolo di un punto materiale appoggiato su una superficie . . . . . 273.2.4 Cerniera sferica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.2.5 Cerniera cilindrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27

Fisica generale CC© BY:© $\© =©
3.2.6 Rotolamento puro (senza strisciamento) . . . . . . . . . . . . . . . . 273.3 Forze di attrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.1 Attrito radente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.3.2 Attrito volvente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4 Esempi di problemi statici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.4.1 Punto materiale vincolato a scorrere senza attrito lungo una guida
rettilinea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.4.2 Punto materiale appoggiato con attrito su una superficie sferica . . . 303.4.3 Asta rigida con estremo fissato mediante cerniera sferica ideale . . . 313.4.4 Sportello rettangolare con asse di rotazione non perfettamente verticale 323.4.5 Problema statico con rotolamento puro . . . . . . . . . . . . . . . . 33
4 Dinamica 354.1 Principı della dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1.1 Primo principio della dinamica: principio d’inerzia . . . . . . . . . . 354.1.2 Secondo principio della dinamica: massa . . . . . . . . . . . . . . . . 354.1.3 Terzo principio della dinamica: quantita di moto . . . . . . . . . . . 36
4.2 Gravitazione universale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.1 Legge di gravitazione universale (di Newton) . . . . . . . . . . . . . 374.2.2 Esperimento di Cavendish . . . . . . . . . . . . . . . . . . . . . . . . 38
4.3 Problema fondamentale della dinamica del punto materiale . . . . . . . . . 404.3.1 Esempio: forza peso . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.3.2 Esempio: forza elastica . . . . . . . . . . . . . . . . . . . . . . . . . 414.3.3 Esempio: resistenza viscosa . . . . . . . . . . . . . . . . . . . . . . . 424.3.4 Esempio: resistenza idraulica . . . . . . . . . . . . . . . . . . . . . . 44
4.4 Dinamica del punto materiale vincolato . . . . . . . . . . . . . . . . . . . . 464.4.1 Esempio: piano inclinato (senza attrito) . . . . . . . . . . . . . . . . 464.4.2 Esempio: pendolo semplice . . . . . . . . . . . . . . . . . . . . . . . 47
4.5 Sistemi di riferimento inerziali e non. Forze d’interazione e apparenti . . . . 504.5.1 Esempio: SdR che trasla rispetto a un SdR inerziale . . . . . . . . . 514.5.2 Esempio: SdR che ruota rispetto a un SdR inerziale . . . . . . . . . 524.5.3 Esempio: dipendenza di g dalla latitudine . . . . . . . . . . . . . . . 534.5.4 Esempio: pendolo di Foucault . . . . . . . . . . . . . . . . . . . . . . 534.5.5 Esempio: deviazione verso est di gravi in caduta libera . . . . . . . . 54
4.6 Terzo principio della dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . 564.6.1 Principı di conservazione . . . . . . . . . . . . . . . . . . . . . . . . . 564.6.2 Equazioni cardinali della dinamica . . . . . . . . . . . . . . . . . . . 564.6.3 Urti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.6.4 Centro di massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.6.5 Momento angolare dei corpi rigidi . . . . . . . . . . . . . . . . . . . 624.6.6 Momento d’inerzia e raggio d’inerzia . . . . . . . . . . . . . . . . . . 634.6.7 Dinamica dei sistemi . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.7 Esempi di applicazione delle equazioni cardinali della dinamica . . . . . . . 654.7.1 Pendolo composto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.7.2 Pendolo di Kater . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.7.3 Rotolamento puro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.7.4 Carrucola mobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.7.5 Apparecchio di Fletcher . . . . . . . . . . . . . . . . . . . . . . . . . 694.7.6 Apparecchio di Atwood . . . . . . . . . . . . . . . . . . . . . . . . . 704.7.7 Ingranaggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5 Lavoro ed energia 755.1 Lavoro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.1.1 Lavoro di un gruppo di forze . . . . . . . . . . . . . . . . . . . . . . 765.1.2 Principio dei lavori virtuali . . . . . . . . . . . . . . . . . . . . . . . 775.1.3 Teorema della forze vive . . . . . . . . . . . . . . . . . . . . . . . . . 785.1.4 Energia cinetica. Teoremi di Konig . . . . . . . . . . . . . . . . . . . 795.1.5 Esempi di applicazione del teorema delle forze vive . . . . . . . . . . 80
4 Indice
Fisica generale CC© BY:© $\© =©
5.2 Equazione simbolica della statica . . . . . . . . . . . . . . . . . . . . . . . . 835.2.1 Esempi di applicazione dell’equazione simbolica della statica . . . . 83
5.3 Il lavoro di forze conservative . . . . . . . . . . . . . . . . . . . . . . . . . . 875.3.1 Lavoro delle forze peso . . . . . . . . . . . . . . . . . . . . . . . . . . 875.3.2 Forze posizionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.3.3 Campi di forza conservativi . . . . . . . . . . . . . . . . . . . . . . . 885.3.4 Forze e campi gravitazionali . . . . . . . . . . . . . . . . . . . . . . . 88
5.4 Conservazione dell’energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 915.4.1 Principi di conservazione . . . . . . . . . . . . . . . . . . . . . . . . . 915.4.2 Conservazione dell’energia meccanica . . . . . . . . . . . . . . . . . . 91
5.5 Motori e potenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
II Fisica generale L-B: ELETTROMAGNETISMO 93
6 Elettrostatica 956.1 Carica elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6.1.1 Legge di Coulomb . . . . . . . . . . . . . . . . . . . . . . . . . . . . 956.1.2 Campo elettrostatico nel vuoto . . . . . . . . . . . . . . . . . . . . . 966.1.3 Esperimento di Millikan . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.2 Potenziale elettrostatico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1026.2.1 Potenziale del campo coulombiano . . . . . . . . . . . . . . . . . . . 1026.2.2 Potenziale del campo prodotto da una distribuzione di cariche . . . 1036.2.3 Definizione operativa del potenziale elettrostatico . . . . . . . . . . . 1036.2.4 Casi notevoli di calcolo del potenziale . . . . . . . . . . . . . . . . . 1046.2.5 Energia potenziale e moto di particelle cariche . . . . . . . . . . . . 1076.2.6 Seconda equazione di Maxwell . . . . . . . . . . . . . . . . . . . . . 1086.2.7 Equazioni di Poisson e di Laplace . . . . . . . . . . . . . . . . . . . . 1096.2.8 Campo elettrostatico del dipolo elettrico . . . . . . . . . . . . . . . . 1096.2.9 Sviluppo del potenziale in serie di multipoli . . . . . . . . . . . . . . 111
7 Conduttori e condensatori. Correnti elettriche stazionarie 1137.1 Conduttore cavo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
7.1.1 Schermo elettrostatico . . . . . . . . . . . . . . . . . . . . . . . . . . 1147.1.2 Altre proprieta dei conduttori . . . . . . . . . . . . . . . . . . . . . . 115
7.2 Potenziale e capacita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1167.2.1 Valutazione energetica della carica di un conduttore . . . . . . . . . 1167.2.2 Sistema di piu conduttori . . . . . . . . . . . . . . . . . . . . . . . . 117
7.3 Condensatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1177.3.1 Energia elettrostatica . . . . . . . . . . . . . . . . . . . . . . . . . . 1197.3.2 Condensatore con dielettrico . . . . . . . . . . . . . . . . . . . . . . 1227.3.3 Elettrostatica nei dielettrici . . . . . . . . . . . . . . . . . . . . . . . 122
7.4 Correnti elettriche stazionarie . . . . . . . . . . . . . . . . . . . . . . . . . . 1247.4.1 Conservazione della carica elettrica . . . . . . . . . . . . . . . . . . . 1257.4.2 Legge di Ohm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1257.4.3 Generatori di forza elettromotrice . . . . . . . . . . . . . . . . . . . . 1267.4.4 Leggi di Kirchhoff . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
8 Magnetostatica 1318.1 Correnti e campi magnetici . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
8.1.1 Divergenza di ~B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1338.1.2 Rotore di ~B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1348.1.3 Solenoide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1358.1.4 Potenziale vettore . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1368.1.5 Casi notevoli di campo magnetostatico . . . . . . . . . . . . . . . . . 136
8.2 Forza di Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1378.2.1 Moto di una particella carica in un campo magnetico uniforme . . . 1388.2.2 Effetto Hall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Indice 5
Fisica generale CC© BY:© $\© =©
8.2.3 Spire e aghi magnetici . . . . . . . . . . . . . . . . . . . . . . . . . . 139
9 Campi elettromagnetici 1419.1 Legge di Faraday-Lenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
9.1.1 Induzione per moto relativo tra spira e campo magnetico: traslazione 1419.1.2 Induzione per moto relativo tra spira e campo magnetico: rotazione 1429.1.3 Induzione di trasformazione . . . . . . . . . . . . . . . . . . . . . . . 1439.1.4 Mutua induzione e autoinduzione . . . . . . . . . . . . . . . . . . . . 1449.1.5 Energia del campo magnetico . . . . . . . . . . . . . . . . . . . . . . 146
9.2 Equazioni di Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1489.2.1 Ridefinizione del potenziale vettore . . . . . . . . . . . . . . . . . . . 1499.2.2 Estensione del coefficiente M di mutua induzione . . . . . . . . . . . 1509.2.3 Considerazioni di riepilogo sui campi elettromagnetici . . . . . . . . 151
9.3 Onde piane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1519.3.1 Onde sferiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1529.3.2 Onde piane monocromatiche (armoniche) . . . . . . . . . . . . . . . 153
9.3.3 Campi ~E e ~B nelle onde piane . . . . . . . . . . . . . . . . . . . . . 1549.4 Energia e impulso nei campi elettromagnetici . . . . . . . . . . . . . . . . . 155
III Fisica generale L-B: TERMODINAMICA 159
10 Sistemi termodinamici 16110.1 Coordinate termodinamiche . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
10.1.1 Stati termodinamici . . . . . . . . . . . . . . . . . . . . . . . . . . . 16210.1.2 Trasformazioni termodinamiche . . . . . . . . . . . . . . . . . . . . . 164
10.2 Equazione di stato dei gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16510.2.1 Lavoro termodinamico . . . . . . . . . . . . . . . . . . . . . . . . . . 166
10.3 Teoria cinetica dei gas perfetti (metodo statistico) . . . . . . . . . . . . . . 16810.3.1 Stati di aggregazione e punto triplo . . . . . . . . . . . . . . . . . . . 170
11 Primo principio della termodinamica 17111.1 Energia interna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
11.1.1 Calore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17111.1.2 Trasmissione del calore . . . . . . . . . . . . . . . . . . . . . . . . . . 17311.1.3 Capacita termica e calore specifico . . . . . . . . . . . . . . . . . . . 17411.1.4 Proprieta dei gas ideali . . . . . . . . . . . . . . . . . . . . . . . . . 17511.1.5 Esperimento di Joule . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
12 Secondo principio della termodinamica 18112.1 Macchine reversibili. Ciclo di Carnot . . . . . . . . . . . . . . . . . . . . . . 183
12.1.1 Rendimento della macchina di Carnot . . . . . . . . . . . . . . . . . 18312.1.2 Temperatura termodinamica assoluta . . . . . . . . . . . . . . . . . 18512.1.3 Cicli particolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18512.1.4 Teorema di Clausius . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
12.2 Entropia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18712.2.1 Rendimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18912.2.2 Degrado dell’energia . . . . . . . . . . . . . . . . . . . . . . . . . . . 19012.2.3 Entropia come coordinata termodinamica nei sistemi idrostatici . . . 19012.2.4 Energia libera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19212.2.5 Entropia e probabilita . . . . . . . . . . . . . . . . . . . . . . . . . . 193
Elenco delle figure 197
Elenco delle tabelle 199
Indice analitico 200
Bibliografia 204
6 Indice

Il lavoro di Maxwell ha cambiato il mondo per sempre.
- Albert Einstein -

Parte I
Fisica generale L-A:MECCANICA


CAPITOLO 1
Calcolo vettoriale
1.1 Versori
Definizione 1 (Versore). Un versore e un vettore di modulo 1. Il versore v associato alvettore ~v ha direzione e verso uguali a ~v.
Un vettore puo essere scomposto:
• nella componente vu (numero reale), secondo la direzione orientata u:
vu = v cosϑ
dove ϑ e l’angolo compreso tra ~v e u;
• nel componente ~vu (vettore), secondo la direzione orientata u. ~vu ha modulo |vu|, ladirezione di u e verso concorde/discorde con u se il modulo e positivo/negativo.
Quindi, per ogni vettore e possibile definire, secondo una direzione orientata rappresentatada un versore, la componente (numero reale) e il componente (vettore).
1.2 Operazioni vettoriali
1.2.1 Somma di vettori
Presa una direzione orientata u, la componente su u della somma e uguale alla sommadelle componenti su u degli addendi:
~v = ~a+~b+ · · ·+ ~c ⇒ vu = au + bu + · · ·+ cu
1.2.2 Prodotto di un numero per un vettore
Il prodotto α ·~a ha:
• modulo: |α| · a;
• direzione: pari a ~a;
• verso: concorde/discorde se α e positivo/negativo.
Se α =1
asi ottiene il versore:
1
a·~a = a
Lungo una direzione orientata u si ottiene la relazione tra la componente e il componente:
au︸︷︷︸la comp.
· ~u = ~au︸︷︷︸il comp.

Fisica generale CC© BY:© $\© =©
Vettori paralleli. Se due vettori non nulli sono paralleli se esiste un valore m tale chee soddisfatta l’equazione:
~a = m ·~b
m = ±ab
a seconda che i due vettori siano equiversi o controversi.
1.2.3 Prodotto scalare
Dato l’angolo ϑ compreso tra due vettori:
~a ·~b = a · b · cosϑ
Il risultato e un numero reale.
Quadrato di un vettore. L’angolo compreso e nullo, quindi:
~a2 = ~a ·~a = a · a · cos 0 = a · a = a2
1.2.4 Prodotto vettoriale
Dato l’angolo ϑ compreso tra due vettori, il prodotto ~a×~b ha:
• modulo: a · b · senϑ;
• direzione: perpendicolare al piano di ~a e ~b;
• verso: secondo la regola della mano destra (figura 1.1).
Figura 1.1: Prodotto vettoriale (~a×~b) e regola della mano destra
Proprieta del prodotto vettoriale. Non valgono le proprieta commutativa e associa-tiva. Vale la proprieta anticommutativa:
~a×~b = −~b× ~a
Vale la proprieta distributiva:
(~a+~b)× ~c = ~a× ~c+~b× ~c
Vale anche:
(m ·~a)×~b = ~a× (m ·~b) = m · (~a×~b)
12 1 - Calcolo vettoriale

Fisica generale CC© BY:© $\© =©
1.2.5 Doppio prodotto misto
E un prodotto triplo che restituisce un valore scalare.
~a×~b︸ ︷︷ ︸~v
·~c = ~v ·~c = v · cv = ±V
Il doppio prodotto misto calcola, a meno del segno, il volume1 V del parallelepipedo cheha per dimensioni i tre vettori coinvolti (figura 1.2), in particolare:
• v e l’area di base (le dimensioni di base sono ~a e ~b);
• cv e la componente sulla direzione perpendicolare alla base (la dimensione di altezzae ~c).
Figura 1.2: Doppio prodotto misto (~a×~b ·~c)
Proprieta del doppio prodotto misto.
1. Permutazione ciclica: ~a×~b ·~c = ~b× ~c ·~a = ~c× ~a ·~b.
2. Scambio punto-croce: ~a×~b ·~c = ~a ·~b× ~c.
3. Condizione necessaria e sufficiente affinche tre vettori non nulli siano complanari eche il loro doppio prodotto misto sia uguale a 0.
1.2.6 Rappresentazione cartesiana dei vettori
In un sistema di riferimento cartesiano si utilizzano tre versori (i, j, k) rispettivamenteper le direzioni x, y, z. Un generico vettore ~v puo essere scomposto nei suoi componenti,utilizzando i versori per ottenere la rappresentazione cartesiana:
~v = ~vx + ~vy + ~vz = vx · i+ vy · j + vz · k
La rappresentabilita di ogni vettore in forma cartesiana, rispetto al medesimo sistema diriferimento, permette di svolgere le operazioni vettoriali sulle componenti. Ad esempio:
• per la somma tra vettori:
~a+~b = (ax + bx)i+ (ay + by)j + (az + bz)k
• per il prodotto scalare:~a ·~b = axbx + ayby + azbz
• per il modulo di un vettore:
a = |~a| =√a2x + a2
y + a2z
• per il prodotto vettoriale:
~a×~b =
∣∣∣∣∣∣i j kax ay azbx by bz
∣∣∣∣∣∣1Il volume e calcolato a meno del segno.
1.2 - Operazioni vettoriali 13

Fisica generale CC© BY:© $\© =©
• per il doppio prodotto misto:
~a×~b ·~c =
∣∣∣∣∣∣ax ay azbx by bzcx cy cz
∣∣∣∣∣∣1.2.7 Derivate di un punto e di un vettore
La derivata del punto posizione P (t), rispetto al tempo t, e un vettore con direzionetangente alla traiettoria nel punto P :
dP
dt= lim
∆t→0
P (t+ ∆t)− P (t)
∆t
Essendo un vettore, la derivata di P e esprimibile come:
dP
dt=
∣∣∣∣dPdt∣∣∣∣ · u
La derivata di un vettore ~v(t), rispetto al tempo t, e un vettore:
d~v
dt= lim
∆t→0
~v(t+ ∆t)− ~v(t)
∆t
Esprimendo il vettore come differenza tra i suoi punti estremi (~v = B −A), allora:
d
dt(B −A) =
d
dtB − d
dtA
Se A e fisso2, allora la derivata della posizione P di un punto e uguale alla derivata delvettore posizione P −A.
In rappresentazione cartesiana:
d~v
dt=d vxdt
· i+d vydt
· j +d vzdt
· k
Integrale di un vettore. Vista l’esistenza della derivata di un vettore, e possibiledefinire anche l’integrale per definizione inversa.
~w =
∫~v dt ⇔ d ~w
dt= ~v
∫ t2
t1
~v dt = ~w(t2)− ~w(t1)
In rappresentazione cartesiana:∫ t2
t1
~v dt = i ·∫ t2
t1
~vx dt+ j ·∫ t2
t1
~vy dt+ k ·∫ t2
t1
~vz dt
1.3 Momento
Definizione 2 (Vettore applicato). Un vettore e applicato quando e definito un punto (“diapplicazione”) sul quale il vettore agisce. La retta che ha la stessa direzione del vettore ecomprende il punto d’applicazione e denominata retta d’azione.
Definizione 3 (Centro di riduzione). Il centro di riduzione e un punto O nello spaziorispetto al quale viene calcolato il momento di un insieme di vettori.
Il momento e un vettore definito rispetto a un centro di riduzione O:
~M(O) = (P −O)× ~F
2In questo caso, la derivata di A e nulla.
14 1 - Calcolo vettoriale

Fisica generale CC© BY:© $\© =©
• ~M(O) e perpendicolare al piano su cui giacciono (P −O) e ~F .
• Il modulo di ~M(O) e il prodotto tra F =∥∥∥~F∥∥∥ e il braccio b, cioe la distanza tra O e
la retta di applicazione.
1. Il momento si annulla quando il centro di riduzione O sta sulla stessa retta diapplicazione: poiche il questo caso (P − O) e ~F hanno la stessa direzione, illoro prodotto vettoriale si annulla.
2. Il momento non cambia se si sposta O parallelamente alla retta d’azione.
Il momento risultante, rispetto ad un unico centro di riduzione O, di un insieme di vettoriapplicati ~F1, ~F2, . . . , ~Fn e:
~M(O) =
n∑i=1
(Pi −O)× ~Fi
che, in generale, dipende dalla scelta di O. Solo quando la risultante ~R di tutte le forze euguale a ~0, allora il momento risultante e indipendente dal centro di riduzione.
1.3.1 Momento assiale
Il momento assiale di ~F , rispetto ad un qualunque punto O dell’asse u (avente versore u),e la componente Mu su u tale che:
Mu = ~M(O) · u
= (P −O)× ~F · u
Nota 1.3.1. Il momento assiale e un doppio prodotto misto tra tre vettori complanari.
Il momento assiale risultante, scelta una retta u e rispetto ad un qualunque centro O,e:
Mu =
n∑i=1
(Pi −O)× ~Fi · u
1.3.2 Insiemi equivalenti di vettori applicati
Due insiemi sono equivalenti se hanno:
1. la stessa risultante ~R;
2. lo stesso momento ~M(O), rispetto allo stesso centro di riduzione O.
Cio significa che, in presenza di n vettori applicati in uno stesso punto P :
n∑i=1
~Fi = ~R ⇒ ~M(O) =
n∑i=1
(Pi −O)× ~R
Al contrario, il presenza di n vettori paralleli ed equiversi (la cui risultante si applica inC, designando u come versore della direzione dei vettori si ha:
n∑i=1
~Fi =
n∑i=1
Fi · u = R · u
~M(O) =
n∑i=1
(Pi −O)× ~Fi =
[n∑i=1
Fi(Pi −O)
]︸ ︷︷ ︸
R · (C−O)
×u = (C −O)×R · u = (C −O)× ~R
1.3 - Momento 15

Fisica generale CC© BY:© $\© =©
1.4 Rotore
Definizione 4 (Densita superficiale di circuitazione). Avendo calcolato la circuitazione
C di un campo vettoriale ~F lungo una linea chiusa, e possibile determinare il limite:
σn(P ) = limS→0
C
Scon C =
∮~F dP
Nota 1.4.1. Per ogni posizione di P si possono trovare infinite σn, corrispondenti alle infinite direzioniorientate n. Esiste, pero, un solo valore σn0
che si ha per la direzione n0 in cui la densita superficiale dicircuitazione e massima.
Definizione 5 (Rotore). Il rotore di un campo vettoriale descrive la sua rotazione infini-tesima. E un vettore che ha per modulo la densita superficiale di circuitazione, calcolatanella direzione di massimo n0, e per direzione il versore n0 stesso:
~∇× ~F = σn0(P ) · n0
Dimostrazione. Si considera una traiettoria rettangolare sul piano xy, di verticiABCD,con lati ∆x e ∆y e con circuitazione da A a D. Si puo calcolare il limite della circuitazione.
dI = lim∆x→0∆y→0
∮~F dP
= lim∆x→0∆y→0
[∫ B
A
Fx dx+
∫ C
B
Fy dy +
∫ D
C
Fx dx+
∫ A
D
Fy dy
]
= lim∆x→0∆y→0
[Fx(x0, y0, z0) · ∆x+ Fy(x0 + ∆x, y0, z0) · ∆y + . . .
· · · − Fx(x0, y0 + ∆y, z0) · ∆x− Fy(x0, y0, z0) · ∆y]
= lim∆x→0∆y→0
[Fy(x0 + ∆x, y0, z0)− Fy(x0, y0, z0)
∆x· ∆x∆y + . . .
. . . −Fx(x0, y0 + ∆y, z0)− Fx(x0, y0, z0)
∆y· ∆x∆y
]=
[∂Fy∂x
(x0, y0, z0)− ∂Fx∂y
(x0, y0, z0)
]dx dy
=(~∇× ~F
)zdx dy
dI
dsxy=
(~∇× ~F
)z
Determinante simbolico. L’espressione del rotore puo essere ricordata attraverso l’usodi un determinante simbolico:
~∇× ~F =
∣∣∣∣∣∣∣∣i j k∂
∂x
∂
∂y
∂
∂zFx Fy Fz
∣∣∣∣∣∣∣∣
16 1 - Calcolo vettoriale

CAPITOLO 2
Cinematica
2.1 Livelli di moto
Un punto e in movimento se, col passare del tempo, varia la propria posizione nel sistemadi riferimento scelto.
Ci sono tre differenti livelli di moto:
livello 0: posizione;
livello 1: velocita (rapidita di variazione di posizione);
livello 2: accelerazione (rapidita di variazione della velocita).
2.1.1 Posizione
La posizione (funzione P (t)) e determinata da un punto fisso O e dal vettore posizionale~r(t), definito tra O e la posizione attuale P :
~r(t) = P −O
Definizione 6 (Traiettoria). Una traiettoria e una linea geometrica costituita da tutte leposizioni assunte dal punto nel corso del suo moto.
Definizione 7 (Legge oraria). La legge (o equazione) oraria e il legame matematicocostitutivo dell’arco di traiettoria compreso tra O e P :
s = s(t)
L’unione della traiettoria e dell’equazione oraria determinano la descrizione intrinsecadella posizione, cioe svincolata dalla scelta di assi coordinati. Al contrario, qualora sivogliano utilizzare delle equazioni parametriche1, si ottiene la descrizione cartesiana: x = x(t)
y = y(t)z = z(t)
Le equazioni parametriche danno le componenti cartesiane di ~r:
P −O = x · i+ y · j + z · k
1Solitamente il parametro e il tempo (t).

Fisica generale CC© BY:© $\© =©
2.1.2 Velocita
Si possono distinguere due casi:
1. moto uniforme:
s(t) = v · t+ s0 (lineare) ⇒ v =s(t+ ∆t)− s(t)
∆t(costante)
2. moto vario:
s(t) (non lineare) ⇒ vm =s(t+ ∆t)− s(t)
∆t(non costante)
Poiche la velocita non varia linearmente, si considera la velocita media scalare vm eda essa si ricava la velocita istantanea:
vi = lim∆t→0
vm = lim∆t→0
s(t+ ∆t)− s(t)∆t
=d s
dt= s
s e una misura scalare della rapidita di movimento, ma non da informazioni sulla direzionedel moto.
Velocita istantanea vettoriale. Avendo due posizioni P (t) e P (t + ∆t), si considerail segmento orientato P (t+ ∆t)−P (t): e lo spostamento del punto P in senso vettoriale2.Da esso e possibile estrarre la velocita media vettoriale:
vm =P (t+ ∆t)− P (t)
∆t
da cui la velocita istantanea vettoriale:
~v = lim∆t→0
P (t+ ∆t)− P (t)
∆t=dP
dt= P
Espressione intrinseca della velocita. Visto che, al limite, arco e vettore si confon-dono, si ha:
|s| ≡∣∣∣P ∣∣∣ ⇒ ~v = s · t
dove t e il versore tangente alla traiettoria, con verso concorde a quello prestabilito.
Espressione cartesiana della velocita. Derivando rispetto al tempo l’espressionecartesiana del vettore posizionale si ottiene quella del vettore velocita:
~v = x · i+ y · j + z · k
Velocita areolare
Si considera ~v come vettore applicato al punto di applicazione P . Il momento della velocita,rispetto ad un centro di riduzione O, determina la seguente grandezza:
~A =1
2· (P −O)× ~v
definita come velocita aerolare. Il suo modulo misura la rapidita con cui varia l’areaspazzata dal vettore P −O col variare del tempo (figura 2.1).
2.1.3 Accelerazione
Derivando rispetto al tempo il vettore velocita si ottiene:
~am =~v(t+ ∆t)− ~v(t)
∆taccelerazione media
~a = lim∆t→0
~v(t+ ∆t)− ~v(t)
∆t=d~v
dt= P accelerazione
2In linea d’aria.
18 2 - Cinematica

Fisica generale CC© BY:© $\© =©
Figura 2.1: Velocita areolare
Espressione intrinseca dell’accelerazione. Derivando rispetto al tempo l’espressioneintrinseca della velocita:
~a =d
dt
[s · t]
= s · t+ s · ˙t
= s · t+ s ·d t
dt
= s · t+ s ·d t
ds·d s
dt︸︷︷︸s
= s · t+ s2 ·d t
ds
= s · t+s2
ρ· n
Nota 2.1.1. Studiando vari casi si determina ched t
ds=
1
ρ· n, dove ρ e il raggio di curvatura e n il versore
normale alla traiettoria (centripeto).
Espressione cartesiana dell’accelerazione. Derivando rispetto al tempo l’espressionecartesiana della velocita:
~a = x · i+ y · j + z · k= vx · i+ vy · j + vz · k
2.2 Tipi di moto
In tabella 2.1 e proposto un riepilogo delle informazioni sui vari tipi di moto, di seguitoesposti.
Traiettoria Equazione oraria Velocita Accelerazione
Rettilineo uniforme retta s = v · t+ s0 ~v = v · t ~a = ~0(costante)
Rettilineo unif. accel. retta s =1
2at2 + v0t+ s0 ~v = (at+ v0) · t ~a = a · t
(costante)
Circolare uniforme circonf. s = v · t+ s0 ~v = v · t ~a =v2
r· n
(cost. in modulo) (cost. in modulo)Armonico sinusoide s = l sen (ωt+ α) + s0 s = lω cos(ωt+ α) s = −lω2 sen (ωt+ α)
Tabella 2.1: Tipi di moto
2.2.1 Moto rettilineo uniforme
La traiettoria e una retta, quindi il versore tangente t e costante. L’equazione oraria e:
s = v · t+ s0
2.2 - Tipi di moto 19

Fisica generale CC© BY:© $\© =©
per cui la velocita e:
s = v ⇒ ~v = s · t = v · t (costante)
e l’accelerazione e:s = 0 ⇒ ~a = ~0
2.2.2 Moto rettilineo uniformemente accelerato
La traiettoria e una retta, quindi il versore tangente t e costante. L’equazione oraria e:
s =1
2a · t2 + v0 · t+ s0
per cui le derivate di s sono:
s = at+ v0 e s = a
a e l’accelerazione tangenziale. Poiche, in una retta, ρ = +∞, allora l’accelerazionenormale e nulla e a coincide col modulo dell’accelerazione.
La velocita varia di quantita uguali in tempi uguali:
~v = s · t = (at+ v0) · t
mentre l’accelerazione e costante:
~a = s · t = a · t (costante)
Figura 2.2: Moto circolare uniforme [1]
2.2.3 Moto circolare uniforme
La traiettoria e una circonferenza (figura 2.2). L’equazione oraria e:
s = v · t+ s0
per cui le derivate di s sono:s = v e s = 0
La velocita e l’accelerazione sono costanti in modulo, ma variabili in direzione:
~v = v · t
~a = at · t+ an · n =v2
r· n
at = s = 0 e an =v2
r= cost.
L’accelerazione, in particolare, ha le due componenti normale e tangenziale, quest’ul-tima nulla. L’accelerazione ~a, diretta dalla circonferenza verso il centro, e chiamataaccelerazione centripeta.
20 2 - Cinematica

Fisica generale CC© BY:© $\© =©
2.2.4 Moto armonico
La traiettoria e una sinusoide3. L’equazione oraria e:
s = l · sen (ωt+ α) + s0
dove:
• l: ampiezza (meta della lunghezza della traiettoria);
• ωt+ α: fase;
• ω: pulsazione;
• α: fase iniziale;
• T =2π
ω: periodo;
• 3=1
T: frequenza.
La componente tangenziale della velocita e:
s = l ·ω · cos(ωt+ α)
mentre quella dell’accelerazione e:
s = −l ·ω2 · sen (ωt+ α)
che, nel caso particolare di s0 = 0, diventa s = −ω2 · s. Quindi si puo scrivere:
s+ ω2 · s = 0
2.3 Vincoli. Gradi di liberta
Definizione 8 (Numero di gradi di liberta). Minimo numero di parametri necessari perindividuare una generica configurazione di un sistema meccanico.
Un punto libero nello spazio ha tre parametri, cioe le tre coordinate dello spazio tri-dimensionale. Per estensione di concetto, n punto liberi nello spazio ed indipendenti traloro hanno in totale 3n parametri di liberta.
Definizione 9 (Vincolo). Restrizione ai possibili movimenti di un sistema meccanico.Solitamente un vincolo diminuisce il numero di gradi di liberta di un sistema.
Alcuni esempi:
• un punto costretto a muoversi su un piano ha due soli gradi di liberta;
• un punto vincolato a muoversi su una retta ha un solo grado di liberta;
• due punti P1 e P2 vincolati tra loro ad avere la stessa distanza |P2 − P1| hannocinque gradi di liberta: tre per quanto riguarda P1, due per P2 che e vincolato allasuperficie sferica di centro P1;
• tre punti P1, P2 e P3 vincolati a distanze fisse tra loro hanno sei gradi di liberta:cinque per la coppia P1, P2, uno per P3 che e vincolato a una circonferenza diequidistanza.
Teorema 1. Sistemi con numero superiore a tre di punti, vincolati a distanze fisse traloro, hanno sempre sei gradi di liberta.
3s e proporzionale al seno o al coseno di un polinomio.
2.3 - Vincoli. Gradi di liberta 21

Fisica generale CC© BY:© $\© =©
Definizione 10 (Corpo rigido). Sistema costituito da punti vincolati a mantenere inalte-rate le mutue distanze.
Secondo quanto visto si puo riassumere:
• un corpo rigido senza vincoli ha sei gradi di liberta;
• un corpo rigido con un punto vincolato ha tre gradi di liberta;
• un corpo rigido con due punti vincolati ha un solo grado di liberta.
2.4 Cinematica del corpo rigido
Si prenda un corpo rigido, considerando tre versori i, j, k. Essi cambiano direzione,mantenendo pero modulo unitario e mutua perpendicolarita:
i · i = 1
j · j = 1
k · k = 1
,
i · j = 0
j · k = 0
k · i = 0
Le derivate dei versori non sono nulle (hanno modulo costante ma direzione variabile), madalle equazioni sopra si ottiene:
d i
dt· i = 0
d j
dt· j = 0
d k
dt· k = 0
,
d j
dt· j = −d j
dt· i
d k
dt· k = −d k
dt· j
d i
dt· i = −d i
dt· k
I prodotti scalari dei due sistemi appena calcolati sono le componenti delle derivate deiversori, secondo i versori stessi: tre componenti sono nulle, mentre sei sono opposte acoppie. Indicando con ω1, ω2, ω3 le componenti variabili col tempo si puo definire:
d i
dt= ω3 · j − ω2 · k
d j
dt= −ω3 · i+ ω1 · k
d k
dt= ω2 · i− ω1 · j
Si definisce poi un nuovo vettore con le componenti prima indicate:
~ω = ω1i+ ω2j + ω3k
dal quale si puo effettuare il seguente calcolo:~ω × i = ω3 · j − ω2 · k~ω × j = −ω3 · i+ ω1 · k~ω × k = ω2 · i− ω1 · j
Questa operazione coi versori restituisce ai secondi membri i medesimi del sistema prece-dente, rendendo pertanto possibile l’uguaglianza:
d i
dt= ~ω × i
d j
dt= ~ω × j
d k
dt= ~ω × k
FORMULE DI POISSON
22 2 - Cinematica

Fisica generale CC© BY:© $\© =©
Teorema 2. Per ogni movimento di un qualsiasi corpo rigido, esiste un vettore ~ω tale cheil suo prodotto vettoriale con un versore e pari alla derivata del versore rispetto al tempo:
d u
dt= ~ω × u
~ω non dipende dalla scelta dei versori i, j, k (e costante per qualsiasi altra terna diversori solidali col corpo rigido), ma dipende solo dal modo di muoversi del corpo rigidoe, quindi, caratterizza in ogni istante il moto del corpo.
Si consideri ora P solidale al corpo rigido. Il vettore P −O ha modulo r costante, maversore variabile (perche solidale al corpo rigido, mobile):
P −O = r · u
Derivando:dP
dt=dO
dt+ r ·
d u
dt
~vP = ~vO + r · ~ω × u = ~vO + ~ω × r · u
cioe:~vP = ~vO + ~ω × (P −O)
che e la formula fondamentale dei corpi rigidi e vale per ogni coppia di punti (P,O) diuno stesso corpo rigido. In tal modo, e possibile trovare tutte le velocita di tutti i puntidi un corpo rigido: per questo motivo, il vettore ~ω e chiamato velocita angolare o velocitadi rotazione.
2.5 Cambiamento del sistema di riferimento
Si scelgono due sistemi di riferimento:
1. S: sistema mobile (riferimento relativo);
2. S′: sistema fisso (riferimento assoluto).
S :
origine Oassi x, y, z
versori i, j, k, S′ :
origine O′
assi x′, y′, z′
versori i′, j′, k′
2.5.1 Modifica del SdR per posizione
Considerando la posizione P di un punto, nel nuovo sistema di riferimento si avra:
P −O′ = (P −O) + (O −O′)
cioe la somma vettoriale tra le due distanze.
2.5.2 Modifica del SdR per velocita
Alla formula del vettore posizione si sostituisce una parte in coordinate cartesiane:
P −O′ = xi+ yj + zk +O −O′
Derivando4 rispetto al tempo:
~vA = xi+ yj + zk︸ ︷︷ ︸~vR
+xd i
dt+ y
d j
dt+ z
d k
dt+ ~vO︸ ︷︷ ︸
~vT
dove:
4Per S′ possono variare, col tempo, le coordinate xyz e i tre versori.
2.5 - Cambiamento del sistema di riferimento 23

Fisica generale CC© BY:© $\© =©
• ~vA e la velocita assoluta del punto P ;
• ~vO e la velocita assoluta del punto O;
• ~vR e la velocita relativa del punto P rispetto al sistema S;
• ~vT e la velocita di trascinamento che avrebbe P rispetto al sistema S′, se fossesolidale con il sistema S.
Riepilogando si ha ~vA = ~vR + ~vT , con:
~vT = ~vO + ~ω × (P −O)
dove il vettore ~ω e la velocita di rotazione del sistema S rispetto al sistema S′.
2.5.3 Modifica del SdR per accelerazione
Derivando l’espressione dettagliata della velocita, ricavata appena sopra:
~aA = xi+ yj + zk︸ ︷︷ ︸~aR
+ 2xd i
dt+ 2y
d j
dt+ 2z
d k
dt︸ ︷︷ ︸~aC
+xd2 i
dt2+ y
d2 j
dt2+ z
d2 k
dt2︸ ︷︷ ︸~aT
+~aO
dove:
• ~aA e l’accelerazione assoluta del punto P ;
• ~aO e l’accelerazione assoluta del punto O;
• ~aR e l’accelerazione relativa del punto P rispetto al sistema S;
• ~aC e l’accelerazione di Coriolis5;
• ~aT e l’accelerazione di trascinamento che avrebbe P rispetto al sistema S′, se fossesolidale con il sistema S.
Riepilogando si ha ~aA = ~aR + ~aT + ~aC , con:
~aT = ~aO + ~ω × (P −O) + ~ω ×[~ω × (P −O)
]~aC = 2~ω × ~vR
dove il vettore ~ω e la velocita di rotazione del sistema S rispetto al sistema S′.
5Anche accelerazione complementare: si tratta di una forza apparente, dipendente solo dal motodell’osservatore rispetto al sistema di riferimento e non dall’azione di un campo di forze.
24 2 - Cinematica

CAPITOLO 3
Statica
La statica e la parte della meccanica che studia l’equilibrio di un sistema, cioe la quiete diun sistema pur sottoposto a forze. Si intendono come forze tutte quelle grandezze fisicheche determinano il moto.
3.1 Principı della statica
Proprieta 3.1 (Regola 1 della statica). Sostituendo a due forze, applicate in uno stessopunto materiale, la loro somma applicata nel medesimo punto (o viceversa), l’equilibriodel punto1 non e alterato.
Proprieta 3.2 (Legge di Hooke). L’allungamento di una molla e direttamente propor-zionale alla forza ad essa applicata, per estensioni non eccessive (che non provochinodeformazione):
~F = −l · ~∆l ⇒ F = k · |∆l|
Proprieta 3.3 (Statica del punto materiale). Un punto materiale e in equilibrio se la
risultante ~R di tutte le forze, ad esso applicate, e nulla:
~R = ~0
Proprieta 3.4 (Regola 2 della statica). Poiche un corpo rigido ha piu punti di ap-plicazione, spostando una forza lungo la sua retta di applicazione, l’equilibrio non ealterato.
Teorema 3 (Equazioni cardinali della statica). Condizione necessaria e sufficienteper l’equilibrio di un corpo rigido e la seguente:
~R = ~0~M(0) = ~0 (per qualunque centro di riduzione)
Proprieta 3.5 (Baricentro di un corpo rigido qualsiasi). Ogni corpo rigido e suddivisibile
in n punti materiali, ciascuno soggetto a una forza peso ~Fi e con tutte le forze pesoparallele. La risultante di queste forze e il peso totale ed e applicata nel centro dei vettoriparalleli, cioe nel baricentro G. Le coordinate di G sono le medie pesate delle coordinate
1O del corpo a cui appartiene.

Fisica generale CC© BY:© $\© =©
xi, yi, zi degli n punti materiali:
xG =1
R
n∑i=1
Fi ·xi
yG =1
R
n∑i=1
Fi · yi
zG =1
R
n∑i=1
Fi · zi
Se si dividesse il corpo in due o piu parti, ognuna avrebbe un proprio baricentro parziale;il baricentro totale e, in ogni caso, il baricentro di quelli parziali.
Proprieta 3.6 (Baricentro di un corpo rigido omogeneo). Un corpo rigido omogeneo haporzioni di volume uguale che hanno peso uguale, per cui dividendolo in n punti materialitutte le forze peso sono identiche. Le coordinate del baricentro sono le medie aritmetichedelle coordinate xi, yi, zi degli n punti materiali:
xG =1
n
n∑i=1
xi
yG =1
n
n∑i=1
yi
zG =1
n
n∑i=1
zi
3.2 Vincoli e forze vincolari
Un vincolo vieta certi tipi di movimento e ne permette alcuni altri. Si realizza un vincoloattraverso un dispositivo vincolare che impedisce i movimenti esercitando opportune forzevincolari.
Proprieta 3.7. Le forze vincolari sono sconosciute a priori: si devono adeguare allecircostanze.
Definizione 11 (Vincolo ideale). Un vincolo ideale e un dispositivo vincolare che impe-disce sempre i movimenti proibiti e non influisce in alcun modo sui movimenti permessi.
3.2.1 Vincolo di un punto materiale su una linea
La forza vincolare e sempre perpendicolare alla linea, se il vincolo ideale. Una buonaapprossimazione di vincolo ideale si ha con ~Rt = ~0, dove ~Rt rappresenta la forza d’attrito(figura 3.1).
La forza vincolare ~R e stata sostituita dai due componenti tangente e normale; ~Rtrappresenta la forza d’attrito. Mentre le ~Rn sono infinite, la ~Rt e unica per questo vincolo.
In equilibrio si deve annullare la risultante di tutte le forze presenti:
~F + ~Rn + ~Rt + ~p = ~0
che equivale, lungo l’asse di ~F , a:
p cosα = F −Rt
per cui c’e equilibrio quando p cosα = F considerando nullo l’attrito (Rt = 0).
3.2.2 Vincolo di un punto materiale su una superficie
La forza vincolare e sempre perpendicolare alla superficie, se il vincolo e ideale. Una buonaapprossimazione di vincolo ideale si ha con ~Rt = ~0 (attrito).
I ragionamenti sono gli stessi del vincolo su una linea, con la differenza che in questovincolo sono le ~Rt ad essere infinite, mentre la ~Rn e unica.
26 3 - Statica

Fisica generale CC© BY:© $\© =©
Figura 3.1: Vincolo di un punto materiale su una linea e attrito radente
3.2.3 Vincolo di un punto materiale appoggiato su una superficie
Il punto non puo attraversare la superficie, ma puo allontanarsi in una parte di spazio aisuoi lati.
• Il punto materiale non tocca la superficie: la forza vincolare e nulla.
• Il punto materiale tocca la superficie: e presente la forza vincolare ~Rn (forza d’ap-poggio), con verso dalla superficie allo spazio accessibile.
La forza vincolare e sempre perpendicolare alla superficie, col verso che porta nella partedi spazio accessibile al punto, se il vincolo e ideale. Una buona approssimazione di vincoloideale si ha con ~Rt = ~0 (attrito).
Un corpo rigido pesante, appoggiato su un piano orizzontale fisso:
1. se ha un solo punto d’appoggio, e in equilibrio se e solo se la verticale passante per ilbaricentro attraversa l’unico punto d’appoggio. Infatti le uniche forze in gioco sono ~pe ~Rn le quali, per le equazioni cardinali della statica, devono essere uguali e trovarsisulla stessa retta d’azione per ottenere l’equilibrio;
2. se ha piu punti d’appoggio, e in equilibrio se e solo se la verticale passante per ilbaricentro attraverso il poligono d’appoggio (formato dai punti d’appoggio).
3.2.4 Cerniera sferica
Una cerniera sferica costringe un punto ad assumere una certa posizione, fissa oppurecoincidente con un punto prestabilito di un altro corpo rigido.
Le forze vincolari equivalgono ad una sola forza applicata nel centro della cerniera, se
il vincolo e ideale. Una buona approssimazione di vincolo ideale si ha con ~M((O)v) = ~0
(attrito sulla superficie sferica).
3.2.5 Cerniera cilindrica
Una cerniera cilindrica costringe i punti di una retta u a rimanere fissi oppure solidali conun altro corpo rigido. u e l’asse della cerniera cilindrica: il corpo rigido incernierato evincolato a ruotare attorno a u.
Le forze vincolari hanno momento assiale nullo (cioe possono essere tutte applicate inpunti dell’asse della cerniera), se il vincolo e ideale. Una buona approssimazione di vincolo
ideale si ha con M(v)u = 0 (attrito2 sulla superficie cilindrica).
3.2.6 Rotolamento puro (senza strisciamento)
Le forze vincolari equivalgono a una sola forza, applicata nel punto di contatto con larotaia, se il vincolo e ideale. Una buona approssimazione di vincolo ideale si ha con~M(v)
(C) = ~O (attrito volvente).
2M(v)u e il momento assiale delle forze vincolari rispetto a u, dovuto alle forze d’attrito.
3.2 - Vincoli e forze vincolari 27

Fisica generale CC© BY:© $\© =©
Figura 3.2: Rotolamento puro (senza strisciamento) [1]
Si applica una forza ~F in D per avere equilibrio (figura 3.2). L’equilibrio e raggiuntoquando:
F ' 1
2p senα ⇒ 1
2p senα− ε ≤ F ≤ 1
2p senα+ ε
Per la regola 2 della statica il momento risultante delle forze vincolari, rispetto al puntoC, deve essere: ∣∣∣ ~M(v)
(C)
∣∣∣ ≤ 2 · r · ε
Le forze vincolari sono equivalenti a:~R = ~Rt + ~Rn applicata in C~M(v)
(C) ' ~0 legato alla coppia∣∣∣~Rn∣∣∣ = p cosα∣∣∣~Rt∣∣∣ = p senα− F ' 1
2p senα 6= 0∣∣∣~Rt∣∣∣ non deve essere nullo: puo essere fornito da un attrito (radente) sufficientemente
intenso da impedire lo strisciamento del punto C.~M(v)
(C) e dovuto all’attrito volvente. Se mancasse questo attrito, allora il momento
risultante delle forze esterne avrebbe modulo piccolo, ma non nullo, e la ruota comincerebbea rotolare. L’attrito volvente impedisce il rotolamento, che invece e permesso dal vincolo.
3.3 Forze di attrito
3.3.1 Attrito radente
Definizione 12 (Forze di attrito radente). In presenza di due corpi solidi che si toccano estrisciano l’uno contro l’altro, si determinano forze tangenziali sulle superfici di contatto,le quali si oppongono allo strisciamento.
Consideriamo la figura 3.1, gia analizzata.
• ~F e una forza nota applicata;
• ~R = ~Rn + ~Rt e la forza vincolare (forza d’appoggio e forza d’attrito);
• ~p e il peso complessivo.
28 3 - Statica

Fisica generale CC© BY:© $\© =©
In equilibrio, la risultante deve annullarsi:∣∣∣~Rn∣∣∣ = p cosα ,∣∣∣~R∣∣∣ = |F − p senα|
Il verso di ~Rt e sempre contrario a quello della forza che produce lo strisciamento. L’equi-librio e presente per tutti i valori di F compresi fra un minimo e un massimo, cioe quandol’attrito non supera in modulo un certo valore ε:
p senα− ε ≤ F ≤ p senα+ ε ⇒∣∣∣~Rt∣∣∣ ≤ ε
Quando si cambiano p oppure α, si nota che ε e proporzionale a∣∣∣~Rn∣∣∣:∣∣∣~Rt∣∣∣ ≤ f ·
∣∣∣~Rn∣∣∣dove f e il coefficiente di attrito statico3, che dipende dalle sostanze e dallo stato dellesuperfici, mentre e indipendente dall’area delle superfici interessate.
Se il carico si muove, cioe e presente strisciamento, ci sara solo un valore di F percui rimane in equilibrio. Il discorso e analogo al precedente, ma la disequazione4 diventaequazione con unico risultato: ∣∣∣~Rt∣∣∣ = µ ·
∣∣∣~Rn∣∣∣dove µ e il coefficiente di attrito dinamico o cinetico, che dipende dalle sostanze e dallo statodelle superfici, mentre e indipendente dall’area delle superfici interessate e dalla velocitacon cui esse si muovono. A parita di condizioni si ha che µ < f , quindi e importanteutilizzare il giusto coefficiente a seconda che ci sia strisciamento oppure no.
Rappresentazione con coni circolari. E possibile rappresentare l’attrito statico equello dinamico con due coni di attrito (figura 3.3). Nel cono di attrito statico si ha
ϑ = arctg f e ~R e interno al cono; nel cono di attrito dinamico, invece, si ha ψ = arctgµe ~R coincide col cono.
Figura 3.3: Coni di attrito statico (a sinistra) e dinamico (a destra) [1]
3.3.2 Attrito volvente
Definizione 13 (Forze di attrito volvente). In presenza di un corpo solido (a formadi ruota) che rotola senza strisciamento su un altro corpo solido (che funge da rota-ia), si determinano forze vincolari sulla superficie di contatto, le quali si oppongono alrotolamento.
3Anche coefficiente di attrito radente al distacco oppure coefficiente di aderenza.4In assenza di strisciamento e sufficiente che l’attrito non superi un certo limite, quindi in certe
circostanze puo essere anche nullo.
3.3 - Forze di attrito 29

Fisica generale CC© BY:© $\© =©
Le forze vincolari sono rappresentabili con una forza ~R (il cui componente ~Rt e l’attrito
radente) e da una coppia di momento ~M (coppia di attrito volvente), che ha direzione
opposta a quella del rotolamento prodotto dalle sole forze attive. Il modulo di ~M variatra il caso di equilibrio e quello di rotolamento:
• M≤ ρ ·∣∣∣~Rn∣∣∣ nel caso di equilibrio;
• M = ρ ·∣∣∣~Rn∣∣∣ nel caso di rotolamento.
ρ e il coefficiente di attrito volvente, che dipende dalle caratteristiche della ruota e dellarotaia ed e sostanzialmente lo stesso in entrambi i casi. Valgono, comunque, le distinzionifatte per l’attrito radente.
3.4 Esempi di problemi statici
3.4.1 Punto materiale vincolato a scorrere senza attrito lungo unaguida rettilinea
Un punto materiale di peso ~p, con attrito trascurabile, scorre lungo una guida rettilineache forma un angolo α rispetto alla verticale (figura 3.4). Quali sono la forza di equilibrio~F e la forza vincolare ~R?
Figura 3.4: Punto materiale vincolato a scorrere senza attrito lungo una guida rettilinea [1]
• Dato che l’attrito e trascurabile, allora il vincolo e ideale. In tal caso, la forzavincolare ~R e perpendicolare alla guida.
• Per bilanciare le forze occorre che ~R = −(~p + ~F
), per cui i tre vettori sono
complanari. ∣∣∣~F ∣∣∣ = p cotgα ,∣∣∣~R∣∣∣ =
p
senα
Il verso di ~F e quello indicato in figura 3.4: il verso opposto non da equilibrio, percheil punto materiale si allontana dalla guida.
3.4.2 Punto materiale appoggiato con attrito su una superficiesferica
Un punto materiale di peso ~p, con coefficiente di attrito statico f , e posto sopra unasuperficie sferica (figura 3.5). Quali sono le posizioni di equilibrio?
• Dato che il vincolo non e ideale, bisogna considerare l’attrito:∣∣∣~Rt∣∣∣ ≤ f ·
∣∣∣~Rn∣∣∣.• I tre vettori ~p, ~Rn e ~Rt sono complanari.
Rt = p senϕ , Rn = p cosϕ
⇒ p senϕ ≤ f · p cosϕ ⇒ tgϕ ≤ f · 1 ⇒ 0 ≤ ϕ ≤ arctg f
30 3 - Statica

Fisica generale CC© BY:© $\© =©
Figura 3.5: Punto materiale appoggiato con attrito su una superficie sferica [1]
3.4.3 Asta rigida con estremo fissato mediante cerniera sfericaideale
Un’asta AB sottile, rigida ed omogenea, di peso ~p e lunghezza l, e vincolata ad unacerniera sferica ideale in A e soggetta in B ad una forza nota ~F avente direzione orizzontale(figura 3.6). Quali sono le posizioni di equilibrio e la forza vincolare ~R?
Figura 3.6: Asta rigida con estremo fissato mediante cerniera sferica ideale [1]
• Dato che il vincolo e ideale in A, allora la forza vincolare e applicata in A.
• Dato che l’asta e rigida, valgono le equazioni cardinali della statica per avere l’equi-librio.
– ~R(e) = ~0 ⇒ ~R = −(~F + ~p
)⇒
R =√F 2 + p2
ϑ = arctgF
P
– ~M(e)(A) = ~0 col centro di riduzione in A:
∗ il momento della forza vincolare si annulla;
∗ il momento di ~F deve essere l’opposto del momento del peso ~p.
3.4 - Esempi di problemi statici 31

Fisica generale CC© BY:© $\© =©
I due momenti di ~F e ~p hanno versi contrari, ma stessa direzione: quella orizzontale,perpendicolare a ~F . Quindi, l’asta deve giacere nel piano di ~F .∣∣∣ ~M(A)
∣∣∣ = F · l · | cosϕ|︸ ︷︷ ︸di ~F
= p ·l
2· senϕ︸ ︷︷ ︸
di ~p
F · | cosϕ| =p
2· senϕ
| tgϕ| = 2F
p
ϕ = arctg2F
p(angolo acuto)
Nota 3.4.1. Esiste una soluzione anche con l’angolo supplementare π−ϕ, indicata in figura 3.6 in manieratratteggiata.
3.4.4 Sportello rettangolare con asse di rotazione non perfetta-mente verticale
Uno sportello rettangolare ABCD rigido ed omogeneo, di peso ~p e dimensioni a × b, evincolato ad una cerniera cilindrica ideale sull’asse AB (inclinato di un angolo α rispettoalla verticale) e appoggiato su B (figura 3.7(a)). Quali sono le posizioni di equilibrio e le
forze vincolari ~R (in A) e ~S (in B)?
(a) Condizione di equilibriostabile
(b) Cerniera cilindrica (ingran-dimento)
(c) Condizione di equilibrio in-stabile
Figura 3.7: Sportello rettangolare con asse di rotazione non perfettamente verticale [1]
• Il versore dell’asse di rotazione e u =1
a(A−B).
• La cerniera cilindrica (figura 3.7(b)) e ideale:
– il momento assiale delle forze vincolari e nullo;
– dato che deve essere ~M(e) = ~0 per l’equilibrio, e dato che tutte le forze vinco-lari sono applicate all’asse di rotazione (cioe hanno momento nullo), allora losportello e in equilibrio solo quando si annulla l’unico momento di forze nonvincolari: in questo caso, il peso:
~M(B) = (G−B)× ~p · u = 0
32 3 - Statica

Fisica generale CC© BY:© $\© =©
Trattandosi di un doppio prodotto misto, per annullarsi e sufficiente che i trevettori siano complanari: quindi, lo sportello e in equilibrio quando si trova sulpiano dove giace l’asse AB (5).
• ~R e perpendicolare ad AB, perche non c’e attrito lungo la cerniera.
• ~S si ottiene dai contributi di ~S0 (ortogonale ad AB) e di ~Su dovuto all’appoggio.
Allora, rispetto a B:∣∣∣ ~M(B)
∣∣∣ = R · a︸︷︷︸di ~R
= p ·(b
2cosα± a
2senα
)︸ ︷︷ ︸
di ~p
⇒ R =p
2
(b
acosα± senα
)
Nota 3.4.2. Il segno ± dipende dalla posizione di C rispetto a B.
Su = p cosα , S0 ± p senα = R ⇒ S0 =p
2
(b
acosα∓ senα
)
3.4.5 Problema statico con rotolamento puro
Un disco rigido ed omogeneo, di peso ~p e raggio r, e vincolato a rotolare lungo unaguida rettilinea fissa AB inclinata di un angolo α rispetto all’orizzontale (figura 3.8). Ilrotolamento avviene senza strisciamento, sempre nel piano verticale che contiene la guida.Il punto A e una carrucola, che produce effetti trascurabili. Tutti i vincoli sono ideali.Qual e la distanza x = C −A corrispondente alla posizione di equilibrio?
Figura 3.8: Problema statico con rotolamento puro [1]
• Il punto materiale e sottoposto al peso proprio (~p) e alla forza di trazione della corda
(~T ). In equilibrio,∣∣∣~T ∣∣∣ =
∣∣∣~p∣∣∣.• Siccome la carrucola e ideale, ~T e trasmessa interamente alla ruota:∣∣∣~S∣∣∣ =
∣∣∣~T ∣∣∣ =∣∣∣~p∣∣∣
• Per il vincolo ideale di rotolamento, ci sono due componenti ~Rn e ~Rt.
5Le configurazioni sono due, a seconda che il punto C sia piu in alto oppure piu in basso rispetto alpunto B (cfr. figure 3.7(a) e 3.7(c).
3.4 - Esempi di problemi statici 33

Fisica generale CC© BY:© $\© =©
• Scegliendo come centro di riduzione C, rimangono solo i momenti di ~S e ~p:∣∣∣ ~M(C)
∣∣∣ = S · b︸︷︷︸di ~S
= p · r · senα︸ ︷︷ ︸di ~p
ma S = p
⇒ b = r senα
• Osservando i triangoli in figura: b = x sen 2ϕ = 2x senϕ cosϕ.
• Usando4
ACG:
senϕ =r√
x2 + r2, cosϕ =
x√x2 + r2
⇒ b =2rx2
x2 + r2
⇒ x = r
√senα
2− senα
34 3 - Statica
CAPITOLO 4
Dinamica
4.1 Principı della dinamica
Proprieta 4.1 (Primo principio della dinamica). Un punto materiale, senza forze appli-cato su di esso, o si trova in stato di quiete, o si muove con moto rettilineo uniforme.
Proprieta 4.2 (Secondo principio della dinamica). L’accelerazione di un punto materialee direttamente proporzionale alla risultante delle forze che agiscono su di esso.
Proprieta 4.3 (Terzo principio della dinamica). In presenza di una forza, esercitata daun corpo su di un altro, si manifesta una reazione del secondo corpo il quale applica sulprimo una forza vettorialmente opposta.
4.1.1 Primo principio della dinamica: principio d’inerzia
In assenza di forze rimane invariata la velocita, non la posizione. La velocita di un puntomateriale cambia solo se esiste una forza che la costringe a variare.
Tale situazione non vale per tutti i sistemi di riferimento: esiste, pero, almeno un siste-ma di riferimento (detto inerziale) rispetto al quale, sul punto materiale in considerazione,si applica il principio d’inerzia.
4.1.2 Secondo principio della dinamica: massa
Una forza, applicata ad un corpo, ne modifica la velocita determinando l’accelerazione.Per un punto materiale si puo scrivere:
~F = m ·~a
dove ~F e la somma vettoriale delle forze applicate, mentre m e un coefficiente scalare diproporzionalita, caratteristico del punto materiale, denominato massa.
Caratteristiche della massa.
• E inerziale perche (rispetto a un corpo di massa minore) maggiore e la massa, minoree l’accelerazione a parita di forza.
• E positiva, perche ~F e ~a hanno lo stesso verso.
• E indipendente da posizione e velocita.

Fisica generale CC© BY:© $\© =©
• Generalmente, per ricavare m si misura m =~F
~autilizzando valori noti: ad esempio,
m =~p
gsfruttando la caratteristica di costanza di g = 9, 81 m/s2 in ogni punto
materiale sulla Terra.
• La massa di un corpo qualunque, non puntiforme, e la somma di tutte le masse ditutti i punti materiali in cui si considera suddivisibile il corpo.
• Noti i sistemi di unita di misura tecnico e Internazionale, si definisce il sistema CGS(Centimetro-Grammo-Secondo) nel quale la forza e definita con l’unita di misuradina:
1 dyn = 1 g · cm/s2 = 10−5 N
• La densita o massa volumica individua la mssa dell’unita di volume:
ρm =m
V(densita media)
Un corpo omogeneo ha porzioni di esso, di volume uguale, aventi massa uguale:quindi, la densita media e la stessa per ogni porzione di corpo considerata. Per uncorpo non omogeneo, invece, la densita media cambia punto per punto, mentre ladensita si puo meglio indicare come rapporto degli infinitesimi:
ρ =dm
dV
calcolato in un intorno (di massa e volume infinitesimi) del punto del quale vogliamola densita. Per i corpi omogenei, ρm = ρ.
4.1.3 Terzo principio della dinamica: quantita di moto
~Q = m ·~v
In un sistema materiale, ~Q e la somma vettoriale delle quantita di moto di tutte le partipuntiformi in cui si scompone il corpo:
~Q =
n∑i=1
mi ·~vi
Poiche m e costante, derivando ~Q si ottiene:
d ~Q
dt= ~Q = m ·~a ⇒ ~F = ~Q
dove ~F e la risultante di tutte le forze applicate. Integrando questa relazione tra dueistanti t1 e t2 si ottiene l’impulso della forza:∫ t2
t1
~F dt = ~Q(t2)− ~Q(t1)
Teorema 4 (dell’impulso). L’impulso, relativo a un intervallo di tempo, della forzarisultante agente su un punto materiale e uguale alla variazione di quantita di moto, nellostesso intervallo di tempo.
4.2 Gravitazione universale
Definizione 14 (Leggi di Keplero). Considerando come puntiformi i corpi celesti e pos-sibile enunciare che:
1. i pianeti descrivono orbite ellittiche e il Sole occupa uno dei fuochi dell’ellissi;
36 4 - Dinamica

Fisica generale CC© BY:© $\© =©
2. il raggio vettore che unisce il Sole al pianeta spazza aree uguali in tempi uguali;
3. (periodo di rivoluzione)2 ∝ (semiasse maggiore)
3.
E possibile trarre alcune conclusioni dalle leggi di Keplero.
1. La Prima legge di Keplero definisce la forma della traiettoria di un pianeta nellospazio.
2. La Seconda legge di Keplero stabilisce la proporzionalita tra le aree spazzate e itempi di percorrenza durante lo spazzamento. Se il centro di riduzione O e il Sole,la velocita areolare di un pianeta P e:
~A =1
2(P −O)× ~v
con∥∥∥ ~A∥∥∥ costante, ma ~v variabile. Poiche il moto di P e piano, direzione e verso di
~A sono costanti: quindi l’intero vettore ~A e costante.
3. La Terza legge di Keplero confronta i moti di due differenti pianeti.(T1
T2
)2
=
(a1
a2
)3
4.2.1 Legge di gravitazione universale (di Newton)
Dalle leggi di Keplero, ricavando l’accelerazione dei pianeti, si puo misurare dinamicamentela forza che determina il moto.
Nota 4.2.1. Il Sole, rispetto alle stelle fisse, e fermo nell’origine O degli assi del sistema di riferimento.
Derivando l’equazione della Seconda legge:
~0 =1
2~v × ~v︸ ︷︷ ︸~0
+1
2(P −O)× ~a ⇒ (P −O)× ~a = ~0
Siccome ne P − O (raggio vettore, distanza Sole-pianeta) ne ~a sono nulli1, allora devonoessere due vettori paralleli affinche il prodotto vettoriale si annulli. Per questo motivo,l’accelerazione e diretta verso il Sole, quindi il Sole attira i pianeti.
Per capire l’entita della forza di attrazione serve∥∥∥~a∥∥∥. In coordinate cilindriche piane
la situazione e quella di figura 4.1.
Figura 4.1: Orbita ellittica [1]
Dopo una serie di calcoli, l’accelerazione (radiale) e:
a = −4 ·A2
p · r2oppure ~a = −4 ·A2
p · r2· ir
1~a e nulla perche non si tratta di moto rettilineo uniforme.
4.2 - Gravitazione universale 37

Fisica generale CC© BY:© $\© =©
La forza di attrazione del Sole, su un pianeta di massa m, e:
~F = −(
4A2
p
)︸ ︷︷ ︸
(*)
·m
r2· ir
La quantita indicata con (*) e costante per un dato pianeta e uguale per tutti i pianeti(secondo la Terza legge di Keplero). Se si pone il coefficiente costante come proporzionalealla massa M del Sole:
4A2
p= γM
allora ~F e proporzionale alla massa dei due corpi, attratto e attraente: per il terzo principiodella dinamica, cio e lecito. In tal modo, non volendosi riferire al Sole ma (ad esempio)ad un pianeta coi propri satelliti, ponendo i valori corretti per M (massa del pianeta) e m(massa del satellite) si puo nuovamente trovare la forza di attrazione tra i due.
Definizione 15 (Legge di gravitazione universale).
~F12 = −γm1 ·m2
r2· r
con r = P2 − P1.
γ (chiamato anche G) e una costante universale che dipende solo dalle unita di misurautilizzate.
Generalizzazione per punti materiali. Poiche i corpi celesti erano considerati comepunti materiali, anche se la legge di gravitazione vale per i corpi celesti essa e estendibileanche ai punti materiali:
Un punto materiale P1 di massa m1 esercita su un qualunque altro punto P2
di massa m2 una forza gravitazionale ~F12 diretta secondo la congiungenteP2 − P1 e attrattiva, in modulo direttamente proporzionale al prodotto delledue masse ed inversamente proprozionale al quadrato della distanza P2 − P1.
4.2.2 Esperimento di Cavendish
Henry Cavendish misuro γ e la massa terrestre col suo esperimento.
Due sfere di piombo (P1 e P2) alle estremita di un’asta rigida il cui puntocentrale A e collegato ad un supporto fisso B tramite un filo di torsione, tesoverticalmente (figura 4.2(a)). Per ruotare l’asta di un angolo ϕ serve un insiemedi forze con opportuno momento assiale.
(a) Filo (o bilan-cia) di torsione
(b) Coppia di forze di attrazionegravitazionale
Figura 4.2: Esperimento di Cavendish
In equilibrio:Mu = −k ·ϕ
dove k e la costante elastica di torsione, propria del filo di torsione. Con k piccolo e lesfere in quiete, si avvicinano due grosse sfere S1 e S2 nella maniera di figura 4.2(b). S1 eS2 sono una coppia di forze di attrazione gravitazionale: l’asta ruota di ϕ.
38 4 - Dinamica

Fisica generale CC© BY:© $\© =©
• Il modulo delle forze di gravitazione e inversamente proporzionale al quadrato delladistanza dei centri.
• Il modulo delle forze di gravitazione e direttamente proporzionale alle masse dei corpiattratti e di quelli attraenti.
Dalle verifiche si ottiene:
γ = 6, 67 . . . · 10−11 m3
kg · s2costante gravitazionale
Applicando∥∥∥~F∥∥∥ = m ·
∥∥∥~a∥∥∥ a un punto materiale di massa m che cade verso la Terra2:
m · g = γ ·m ·MR2
⇒ M =g ·R2
γ= 5, 97 . . . · 1024 kg
La massa m e eliminabile perche le forze sono state misurate dinamicamente, dunque me M sono masse inerziali. Tuttavia, con un esperimento analogo, si possono misurare leforze gravitazionali anche staticamente. Poiche la massa inerziale e un concetto dinamico,le masse ottenute per via statica sono dette masse gravitazionali.
Troviamo la relazione tra mi (inerziale) e mg (gravitazionale):
mi · g = γmg ·Mg
r2⇒ mg
mi=
g · r2
γ ·Mg
che e costante per ogni punto materiale e valemg
mi= 1. Quindi mg e mi sono gran-
dezze distinte ma proporzionali, e talvolta identiche. Per questo motivo, spesso si parlasemplicemente di massa.
2Si suppone che la gravitazione sia l’unica forza agente sul punto.
4.2 - Gravitazione universale 39

Fisica generale CC© BY:© $\© =©
4.3 Problema fondamentale della dinamica del puntomateriale
Nella casistica, le forze possono dipendere:
• dalla posizione del punto;
• dalla velocita del punto;
• dal tempo.
~F = ~F (P,~v, t)
Se la dipendenza e nota, allora ~a =1
m· ~F (P,~v, t).
Definizione 16. Il problema fondamentale della dinamica consiste nel prevedere il motodi un punto materiale sottoposto a forze, tutte conosciute.
Si utilizzano le rappresentazioni per coordinate:
posizione 3 coordinatevelocita 3 coordinateaccelerazione 3 coordinate
⇒ sistema di 3 eq. differenzialidel II ordine
⇒ 6 costanti
Le costanti sono arbitrarie, dal punto di vista matematico. Allora, sono assegnate alcuneinformazioni sul moto per determinarle:
P (0) = P0 , ~v(0) = ~v0
Le coordinate di ~a (come definita prima) sono:
x =1
mFx
(x, y, z , x, y, z , t
)y =
1
mFy
(x, y, z , x, y, z , t
)z =
1
mFz
(x, y, z , x, y, z , t
)inoltre sono noti: x(0) = x0
y(0) = y0
z(0) = z0
,
x(0) = v0x
y(0) = v0y
z(0) = v0z
Metodo generale di soluzione di problemi dinamici.
1. Inquadrare il problema.
2. Scrivere la ~F = m~a.
3. Individuare il SdR migliore.
4. Scrivere le equazioni parametriche.
5. Integrare.
6. Calcolare le costanti arbitrarie con le condizioni iniziali.
40 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Figura 4.3: Forza peso
4.3.1 Esempio: forza peso
Il peso non dipende da posizione, velocita, tempo. Allora ~a = ~g.Con la situazione in figura 4.3: x(0) = 0
y(0) = 0z(0) = 0
,
x = 0y = 0z = −g x(0) = v0 cosϑ
y(0) = 0z(0) = v0 senϑ
Integrando il primo sistema:
x = c1y = c2z = −g · t+ c3 senϑ
Conoscendo le velocita iniziali si trova:
c1 = v0 cosϑc2 = 0c3 = v0 senϑ
⇒
x = v0 cosϑy = 0z = −g · t+ v0 senϑ
Integrando nuovamente:
x = t · v0 cosϑ+ k1
y = k2
z = − 12g · t2 + t · v0 senϑ+ k3
Conoscendo le posizioni iniziali si sa che k1 = k2 = k3 = 0, quindi: x = t · v0 cosϑ moto uniforme lungo xy = 0 il moto e interamente sul piano xzz = − 1
2g · t2 + t · v0 senϑ moto uniformemente accelerato lungo z
E interessante notare che il moto e indipendente dalla massa. La traiettoria si trovarisolvendo il sistema, sostituendo la coordinata x in quella z:
z = −x2 ·g
2v02 cos2 ϑ
+ x · tgϑ (traiettoria parabolica)
4.3.2 Esempio: forza elastica
Un punto materiale P parte da P0 e si muove seguendo le reazioni della molla all’esten-sione/contrazione (figura 4.4):
• punto B: posizione con molla non deformata;
• punto O: equilibrio di P ;
• punto P0: posizione iniziale di P .
Istantaneamente, la forza elastica della molla vale: ~Fe = −k · (P −B).
Tenendo conto del peso: ~a = ~g − k
m(P −B).
Con l’asse z verticale, si nota che il moto avviene tutto su z (intuitivamente), quindibastano le equazioni sulla unica coordinata z:
z = g − k
m
(z + (B −O)
)
4.3 - Problema fondamentale della dinamica del punto materiale 41

Fisica generale CC© BY:© $\© =©
Figura 4.4: Forza elastica [1]
dove B −O e l’allungamento della molla con P in equilibrio.Poiche la risultante deve essere nulla, allora: m · g = k · (B −O).Sostituendo:
z +k
m· z = 0 moto armonico di pulsazione
√k
m
da cui z = l sen
(√km · t+ α
). Le costanti da determinare sono l e α. Le condizioni
iniziali sono: z(0) = z0
z(0) = 0
Derivando z:
z = l ·
√k
mcos
(√k
m· t+ α
)⇒ z(0) = l ·
√k
mcosα = 0
cioe α =π
2. Allora:
z = l cos
(√k
m· t
)⇒ z(0) = l cos 0 = l
Allora l’equazione oraria e:
z = z0 cos
(√k
m· t
)quindi il moto e armonico.
4.3.3 Esempio: resistenza viscosa
Si considera un fluido in quiete dentro al quale si lancia una sferetta (di massa m) con unavelocita iniziale ~v0. Il fluido esercita due forze:
• la spinta di Archimede, anche se ~v = ~0;
• la resistenza del mezzo, solo se ~v 6= ~0, diretta come ~v ma di verso contrario.
42 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Misurando:~Fv = −λ ·~v resistenza viscosa
Il parametro λ > 0 dipende dal fluido e dalla sfera. Consideriamo ~v0 piccola.
Ponendo β =λ
msi puo scrivere3:
~R = ~p+ ~Fv
m ·~a = m ·~g − λ ·~v~a = ~g − β ·~v
Con gli assi posti come in figura 4.5 si hanno le seguenti condizioni4:x = −βxz = g − βz
x(0) = 0z(0) = 0
x = v0z = 0
Integrando x si ottiene: x = −βx+ C.
Con C = v0 per le condizioni iniziali:dx
dt= v0 − βx.
Bisogna ricavare x separando le variabili, sfruttando un passaggio in ξ:∫ x
0
dx
v0 − βx=
∫ t
0
dt∫ x
0
dx
v0
(1− β
v0x) = t
ξ = − βv0x ,
dξ
dx= − β
v0∫ ξ
0
1
1 + ξ·(− βv0dx
)︸ ︷︷ ︸
dξ
= t · (−β)
[ln(1 + ξ)
]ξ0
= −βt
ln
(1− β
v0x
)= −βt
1− β
v0x = e−βt
x =v0
β
(1− e−βt
)Al limite: x∞ =
v0
β=m · v0
λ.
Per z si puo risparmiare tutto il ragionamento: viste le somiglianze con x, si sostituiscex con z e v0 = 0 con g. Verificata la coincidenza delle condizioni iniziali e delle equazionidifferenziali, il risultato e:
z =g
β
(1− e−βt
)La componente verticale della velocita, da nulla, aumenta ma sempre piu lentamente,tendendo a:
v∞ =g
β=m · gλ
La componente orizzontale della velocita (x = v0e−βt) e trascurabile dopo un tempo
abbastanza grande. Quindi la velocita e verticale. Il suo modulo e v∞: in questo caso, laresistenza viscosa e opposta al peso:
λ · v∞ = m · g moto rettilineo uniforme
3Trascurando la spinta di Archimede.4L’asse y viene trascurato, essendo il moto interamente sul piano xz.
4.3 - Problema fondamentale della dinamica del punto materiale 43

Fisica generale CC© BY:© $\© =©
Integrando z: ∫ z
0
dz =g
β
∫ t
0
(1− e−βt
)dt
z =g
βt− g
β2
(1− e−βt
)x e z sono parametriche della posizione, quindi descrivono il moto. L’equazione dellatraiettoria (figura 4.5) e:
z =g
β2
[ln
(1− β
v0
)+β
v0x
]
Figura 4.5: Resistenza viscosa
4.3.4 Esempio: resistenza idraulica
Si considera una sfera in moto dentro ad un fluido in quiete. Se ~v e abbastanza grande, lalegge ~Fv = −λ~v non vale. La resistenza del mezzo e ancora diretta come ~v, ma con versocontrario, mentre la forza idraulica ha la seguente legge:
~Fi = −Λ · v ·~v
Λ > 0 dipende dal liquido e dalla sfera.Si vuole studiare il moto di una sfera (di massa m) lanciata con ~v0 verticale ascendente,
con v0 abbastanza grande.Considerando il peso, ma non la spinta di Archimede:
~a = ~g − Λ
mv~v
Si sceglie un asse z verticale ascendente, con origine nella posizione iniziale del lancio. Sivuole dimostrare che il moto avviene lungo l’asse z. Si nota che, in ~a, v = z:
z = −g − Λ
mz2
che e un’equazione differenziale del I ordine, rispetto a v(t) = z, con le seguenti condizioniiniziali:
z(0) = z0
z(0) = v0
Ponendo w2 =mg
Λ, si puo scrivere:
dv
dt= −g
(1 +
v2
w2
)
44 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Separando e integrando:
∫ v
v0
d( vw
)1 +
( vw
)2 = − gw
∫ t
0
dt
arctgv
w− arctg
v0
w= − g
wt
v = w · tg(− gwt+ arctg
v0
w
)Il modulo v =
∥∥∥~v∥∥∥, a partire da v0, diminuisce col tempo e ad un certo punto si annulla5.
L’equazione oraria si ha integrando ancora:
v =dz
dt∫ z
0
dz = w ·∫ t
0
tg(− gwt+ arctg
v0
w
)dt
= α = arctgv0
w
z =w2
gln
cos
(α− gt
w
)cosα
L’equazione oraria e rappresentata in figura 4.6.
Figura 4.6: Resistenza idraulica [1]
5Tuttavia, prima che la sfera si fermi, il concetto di resistenza idraulica cessa di valere.
4.3 - Problema fondamentale della dinamica del punto materiale 45

Fisica generale CC© BY:© $\© =©
4.4 Dinamica del punto materiale vincolato
Se il punto e vincolato, le restrizioni identificano alcune caratteristiche del moto, ma alcuneforze vincolari sono sconosciute.
4.4.1 Esempio: piano inclinato (senza attrito)
Si considera un punto materiale, di massa m e velocita iniziale ~v0, posto su un pianoinclinato (figura 4.7).
Figura 4.7: Piano inclinato (senza attrito)
Si vuole studiare il moto e la forza vincolare ~R. Con gli assi fissati, z(t) = 0 e il vincolo.Le condizioni iniziali sono:
x(0) = 0y(0) = 0
,
x(0) = v0 cosϑy(0) = v0 senϑ
Il punto materiale e sottoposto:
1. al peso ~p = m~g;
2. alla forza vincolare ~R, diretta come l’asse z (perche si trascura l’attrito).
Allora: m~a = m~g + ~R, cioe in componenti: mx = mg senαmy = 0mz = Rz −mg cosα
Dalla terza equazione, sapendo che z(t) = 0: ~R = mg cosα · k.Integrando le altre due equazioni si nota che la massa non determina il moto:
x =
∫tmx =
∫tmg senα = gt senα+ c1
y =
∫tmy = c2
Si determinano le costanti con le condizioni iniziali:c1 = v0 cosϑc2 = v0 senϑ
⇒x = gt senα+ v0 cosϑy = v0 senϑ
Se v0 = 0, oppure ϑ = 0, oppure ϑ = π, allora y = 0 e il moto avviene lungo l’asse x (motorettilineo uniformemente accelerato). Negli altri casi:
a) il moto su x e uniformemente accelerato;
b) il moto su y e uniforme;
c) la traiettoria e una parabola con asse parallelo a x:
x = y2 g senα
2v02 sen 2ϑ
+ y · cotgϑ
46 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Figura 4.8: Pendolo semplice
4.4.2 Esempio: pendolo semplice
Si considera un punto materiale, di massa m, vincolato a muoversi lungo una circonferenza6
giacente in un piano verticale (figura 4.8).
Nota 4.4.1. Si considera un sistema di riferimento cilindrico, con raggio ρ = l e versori n (radiale) e t(tangenziale). L’arco percorso dal pendolo ha lunghezza s = lϕ.
Si vuole studiare il moto dalla posizione inferiore (O) quando il punto ha velocita ~v0.Le condizioni iniziali sono:
s(0) = lϕ(0) = 0s(0) = lϕ(0) = v0
Il punto materiale e sottoposto:
1. al peso ~p = m~g;
2. alla forza vincolare ~R, perpendicolare alla circonferenza.
Allora: ~F = m~a = m~g + ~R. Dato che il moto e circolare uniforme:
~a = st+ s2 1
ρn
La prima componente intrinseca e:
mst = −mg senϕt ⇒ ϕ+g
lsenϕ = 0
⇒ ϕ = α sen (ωt) moto armonico con:
α =
v0√gl
ω =
√g
l
La seconda componente intrinseca e:
ms2
ln = (R−mg cosϕ)n ⇒ R = mlϕ2 +mg cosϕ
che e l’unica componente non nulla della forza vincolare. Ci sono tre casi, a secondadell’ampiezza delle oscillazioni (cioe dell’angolo ϕ).
Caso 1: piccole oscillazioni ( senϕ ' ϕ)
Quando senϕ ' ϕ si puo scrivere:
ϕ+
g
lsenϕ = 0
R = mlϕ2 +mg cosϕ⇒
ϕ+
g
lϕ = 0
R = mlϕ2 +mg⇒
ϕ =v0√gl
sen
(√g
lt
)ϕ =
v0
lcos
(√g
lt
)R ' m
[l(v0
l
)2
cos2
(√g
lt
)+ g
]6Il raggio l della circonferenza e anche la lunghezza l del pendolo.
4.4 - Dinamica del punto materiale vincolato 47

Fisica generale CC© BY:© $\© =©
Si tratta di oscillazioni armoniche di periodo T = 2π
√l
g. Notare che T ∝
√l ma e indi-
pendente dalla massa del pendolo e dall’angolo ϕ (isocronismo delle piccole oscillazioni),ma solo se ϕ e piccolo.
Nota 4.4.2. Misurando con precisione l e T e possibile misurare g.
Caso 2: grandi oscillazioni
Se v0 non e abbastanza piccolo, allora non vale senϕ ' ϕ e bisogna usare l’equazioneoriginaria.
ϕ+g
lsenϕ = 0
2ϕ · ϕ+ 2ϕ ·g
lsenϕ = 0 · 2ϕ
d
dt
(ϕ2 − 2g
lcosϕ
)= 0
ϕ2 − 2g
lcosϕ = C
C = ϕ2(0)− 2g
lcosϕ(0) =
(v0
l
)2
− 2g
l
ϕ2 =2g
lcosϕ+
(v0
l
)2
− 2g
l
=(v0
l
)2
︸ ︷︷ ︸ϕ(0)
− 2g
l(1− cosϕ)︸ ︷︷ ︸≥0
(*)
∣∣∣ϕ∣∣∣ ≤ v0
lsempre
quindi il modulo della velocita∣∣∣s∣∣∣ = l ·
∣∣∣ϕ∣∣∣ non puo mai superare il valore iniziale v0.
Nota 4.4.3. L’equazione differenziale (*) e a variabili separabili: prima di separare, bisogna chiedersi seil secondo membro si annulla (dipende da v0).
Al minimo:(v0
l
)2
− 2g
l(1− cosϕ) = 0
v02
l 2= −2g
l(1− cosϕ)
v0 =√
2gl ·√
1− cosϕ
cosϕ = 1 ⇒ v0 = 0 (minimo)
cosϕ = 0 ⇒ v0 =√
2gl
cosϕ = −1 ⇒ v0 =√
2gl ·√
2 = 2√gl (massimo)
v0 < 2√gl sempre
Il valore ϕ = α per cui ϕ = 0 e:
cosα = 1− v02
2gl⇒ ϕ = ±
√2g
l(cosϕ− cosα)
che equivale all’equazione (*). Per ricavare l’equazione oraria si potrebbero separare le va-riabili e integrare, ma l’integrale ottenuto non sarebbe riconducibile a funzioni elementari.
48 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Si ottiene il periodo T sviluppando in serie:
T = 4
√l
2g·∫ α
0
dϕ√cosϕ− cosα
= 2π
√l
g·
[1 +
(1
2
)2
sen 2α
2+
(1 · 3
2 · 4
)2
sen 4α
2+
(1 · 3 · 5
2 · 4 · 6
)2
sen 6α
2+ . . .
]︸ ︷︷ ︸
trascurabile quando α e piccolo
Nota 4.4.4. Quando i termini tra parentesi sono trascurabili, rimane la forma di T per le piccoleoscillazioni.
Il periodo T e indipendente dalla massa e da√l, ma non e piu indipendente da α,
quindi le grandi oscillazioni non sono isocrone. Quando v0 = 2√gl, cioe α = 180, in
teoria il pendolo si ferma proprio nel punto piu alto della circonferenza e lı rimane fermo,in equilibrio instabile (R = −mg). In pratica, pero, basta un errore anche minimo perchecio non accada e il pendolo continui a muoversi.
Caso 3: moto che non si inverte mai
Quando v0 > 2√gl, allora il secondo membro dell’equazione (*) non puo mai annullarsi
e la derivata ϕ non puo cambiare segno (perche non e mai zero e varia con continuita).Allora ϕ aumenta sempre, quindi il moto non si inverte mai.
ϕ = +
√(v0
l
)2
− 2g
l(1− cosϕ)
4.4 - Dinamica del punto materiale vincolato 49

Fisica generale CC© BY:© $\© =©
4.5 Sistemi di riferimento inerziali e non. Forze d’in-terazione e apparenti
Come cambia lo studio del moto passando da un sistema inerziale ad un altro non inerziale?Dal punto di vista cinematico:
~aA = ~aR + ~aT + ~aC
Dal punto di vista dinamico, si suppone che la legge ~F = m~a sia applicabile in ogni sistemadi riferimento e che la massa m sia indipendente dal SdR. A questo punto si considera:
• S′: sistema di riferimento inerziale (fisso, con grandezze assolute);
• S: sistema di riferimento, inerziale o non inerziale (mobile, con grandezze relative);
• P : punto materiale (di massa m).
Si manifestano due macro-casi.
S inerziale. Il sistema mobile S e inerziale quando il moto di S rispetto a S′ e traslatorio,rettilineo, uniforme. Con tutte queste condizioni verificate accade che:
• ~aT e ~aC sono nulle;
• P ha la stessa accelerazione nei due SdR (infatti ~aA = ~aR).
Gli osservatori inerziali trovano la velocita di P variabile solo a causa di altri corpi inprossimita di P (forze di interazione): ad esempio, forze gravitazionali, elastiche, di attrito.Le forze di interazione sono uguali per tutti i SdR inerziali perche, essendo uguale ~a, eidentica la forza risultante che la provoca.
S non inerziale. Il sistema mobile S non e inerziale quando il moto di S non e trasla-torio, oppure non e rettilineo, oppure non e uniforme. Allora:
• ~aT e ~aC non sono entrambe nulle;
• P non ha la stessa accelerazione nei due SdR (infatti ~aA 6= ~aR); se P e lontano datutti i corpi tanto da non esserne influenzato, la sua accelerazione e nulla per S′
(~aA = ~0), ma non per S.
Ci sono infiniti sistemi non inerziali, ma gli osservatori non inerziali vedono accelerazionidiverse di P (a seconda del SdR) e quindi la risultante delle forze e sempre diversa. Nelsistema inerziale:
~FA = m~aA
dovuta alle interazioni tra P e i corpi che lo circondano. Nel sistema non inerziale:
~FR = m~aR
= ~FA −m~aT︸︷︷︸~FT
−m~aC︸ ︷︷ ︸~FC
= ~FA − ~FT − ~FC
dove sono presenti le forze apparenti o fittizie:
forza di trascinamento: ~FT = −m~aT ;
forza di Coriolis: ~FC = −m~aC .
Cinematicamente le due forze si esprimono come:~FT = −m ·
~a0 + ~ω × (P −O) + ~ω × [~ω × (P −O)]
~FC = −2m~ω × ~vR
e dipendono dal moto di S rispetto a S′:
50 4 - Dinamica
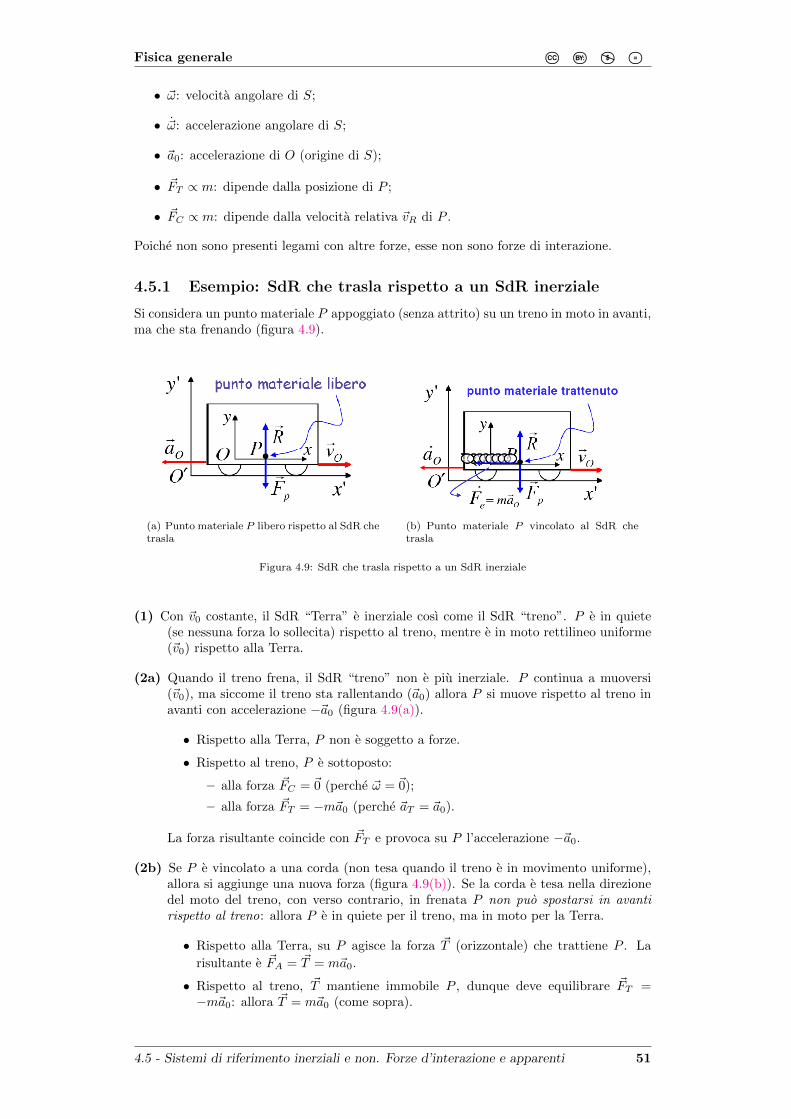
Fisica generale CC© BY:© $\© =©
• ~ω: velocita angolare di S;
• ~ω: accelerazione angolare di S;
• ~a0: accelerazione di O (origine di S);
• ~FT ∝ m: dipende dalla posizione di P ;
• ~FC ∝ m: dipende dalla velocita relativa ~vR di P .
Poiche non sono presenti legami con altre forze, esse non sono forze di interazione.
4.5.1 Esempio: SdR che trasla rispetto a un SdR inerziale
Si considera un punto materiale P appoggiato (senza attrito) su un treno in moto in avanti,ma che sta frenando (figura 4.9).
(a) Punto materiale P libero rispetto al SdR chetrasla
(b) Punto materiale P vincolato al SdR chetrasla
Figura 4.9: SdR che trasla rispetto a un SdR inerziale
(1) Con ~v0 costante, il SdR “Terra” e inerziale cosı come il SdR “treno”. P e in quiete(se nessuna forza lo sollecita) rispetto al treno, mentre e in moto rettilineo uniforme(~v0) rispetto alla Terra.
(2a) Quando il treno frena, il SdR “treno” non e piu inerziale. P continua a muoversi(~v0), ma siccome il treno sta rallentando (~a0) allora P si muove rispetto al treno inavanti con accelerazione −~a0 (figura 4.9(a)).
• Rispetto alla Terra, P non e soggetto a forze.
• Rispetto al treno, P e sottoposto:
– alla forza ~FC = ~0 (perche ~ω = ~0);
– alla forza ~FT = −m~a0 (perche ~aT = ~a0).
La forza risultante coincide con ~FT e provoca su P l’accelerazione −~a0.
(2b) Se P e vincolato a una corda (non tesa quando il treno e in movimento uniforme),allora si aggiunge una nuova forza (figura 4.9(b)). Se la corda e tesa nella direzionedel moto del treno, con verso contrario, in frenata P non puo spostarsi in avantirispetto al treno: allora P e in quiete per il treno, ma in moto per la Terra.
• Rispetto alla Terra, su P agisce la forza ~T (orizzontale) che trattiene P . La
risultante e ~FA = ~T = m~a0.
• Rispetto al treno, ~T mantiene immobile P , dunque deve equilibrare ~FT =−m~a0: allora ~T = m~a0 (come sopra).
4.5 - Sistemi di riferimento inerziali e non. Forze d’interazione e apparenti 51

Fisica generale CC© BY:© $\© =©
4.5.2 Esempio: SdR che ruota rispetto a un SdR inerziale
Si considera una giostra che gira con velocita angolare costante ~ω. Un punto materiale P , dimassa m, e appoggiato sul pavimento della giostra con attrito trascurabile (figura 4.10(a)).Si considerano tre scenari:
(1) P e trattenuto da una corda ideale, orientabile in ogni direzione (figura 4.10(b));
(2) P e libero di muoversi (figura 4.10(c));
(3) P e vincolato su una guida radiale (figura 4.10(d)).
(a) Punto materiale P posizionato sul SdR cheruota
(b) Punto materiale P vincolato al SdRche ruota tramite corda orientabile in ognidirezione
(c) Punto materiale P libero rispetto al SdRche ruota
(d) Punto materiale P vincolato al SdR cheruota tramite guida radiale
Figura 4.10: SdR che ruota rispetto a un SdR inerziale
(1) Se P e fermo rispetto alla giostra (SdR S), allora ruota rispetto alla Terra (SdR S′).L’accelerazione assoluta e quella centripeta: peso e forza d’appoggio del pavimentosi compensano, quindi e la tensione ~T a fornire la forza centripeta.
~T = −mω2(P −O)
Rispetto alla giostra, P e sottoposto:
• alla forza ~FC = ~0 (perche ~vR = ~0: P e fermo);
• alla forza ~FT = mω2(P − O), cioe alla forza centrifuga, che e opposta in verso
a ~T per equilibrio statico.
52 4 - Dinamica

Fisica generale CC© BY:© $\© =©
(2) Rispetto alla Terra, mancando la corda e dunque ~T , P e soggetto a risultante nulla esi muove di moto rettilineo uniforme, scivolando sul pavimento.
Rispetto alla giostra, il moto e curvilineo e vario, poiche c’e ancora ~FT (centrifuga)
ma anche ~FC .
(3) Rispetto alla giostra, P deve muoversi lungo la direzione della forza centrifuga. Poiche~FC ⊥ ~vR, essa e perpendicolare alla guida e deve essere neutralizzata da una forzavincolare ~R = 2m~ω × ~vR: quindi il moto e condizionato dalla sola ~FC .
Rispetto alla Terra esiste solo ~R, che varia in modulo e direzione perche ruota assiemealla giostra.
4.5.3 Esempio: dipendenza di g dalla latitudine
Se la Terra fosse un SdR inerziale, allora esisterebbe ~g′ unico e costante. Se, poi, laTerra non fosse geoidale e avesse densita costante, anche g′ sarebbe dipendente solodall’altitudine (ma non dalla latitudine).
Figura 4.11: Dipendenza di g dalla latitudine [1]
Fissando, invece, un riferimento stellare S0 (con origine O nel centro della Terra), laTerra diventa analoga alla giostra (sezione 4.5.2), per cui un punto P e sottoposto alleforze apparenti, per chi osserva dalla Terra. La forza peso reale e la risultante di due altreforze:
m~g = m~g′ + ~FT
dove ~FT e la forza centrifuga:
• perpendicolare all’asse terrestre;
• nulla ai poli;
• massima all’equatore.
In definitiva, la “verticale” non coincide col raggio terrestre e il valore di g non e quellocanonico utilizzato.
4.5.4 Esempio: pendolo di Foucault
Rispetto a un SdR inerziale, il piano di oscillazione di un pendolo rimane costante. Inun SdR non inerziale e dopo una quantita sufficiente di oscillazioni, il sommarsi di altreforze apparenti mostra, al contrario, che il piano di oscillazione ruota a causa della forzadi Coriolis.
Se, invece, si fissa un SdR inerziale rispetto alle stelle, dato che in tale sistema non esiste~FC allora e proprio la Terra a ruotare sotto al pendolo, mentre esso mantiene costante ilproprio piano di oscillazione (figura 4.12).
4.5 - Sistemi di riferimento inerziali e non. Forze d’interazione e apparenti 53

Fisica generale CC© BY:© $\© =©
Figura 4.12: Pendolo di Foucault
4.5.5 Esempio: deviazione verso est di gravi in caduta libera
Figura 4.13: Deviazione dei moti nell’emisfero settentrionale della Terra
Abbandonando un corpo in quiete, il moto non e (come teoricamente previsto) retti-lineo, verticale, uniformemente accelerato: infatti la forza di Coriolis devia la traiettoria,perche la velocita e perpendicolare a ~FC (figura 4.13). Infatti:
m~aR = m~g−2m~ω × ~vR︸ ︷︷ ︸~FC
dove ~FC e la forza di Coriolis:
• piccola rispetto a m~g;
• nulla ai poli (~ω //~vR);
• massima all’equatore (~ω ⊥ ~vR).
Rispetto al SdR non inerziale (Terra), il responsabile e ~FC , mentre rispetto al SdR iner-ziale, una componente della velocita del grave e verso est e costante: quindi, ~ω aumentadiminuendo l’altezza.
Studio della deviazione all’equatore. Si parte dall’equazione nella quale compare laforza di Coriolis, per ottenerla in una forma con le coordinate esplicitate.
m~aR = m~g − 2m~ω × ~vR~aR = ~g − 2~ω × ~vR
xi+ yj + zk = −gk − 2ωj ×(xi+ yj + zk
)Le condizioni iniziali sono:
x(0) = y(0) = z(0) = 0x(0) = y(0) = z(0) = 0
Uguagliando membro a membro si ottiene: x = −2ωzy = 0z = −g + 2ωx
54 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Si integra la seconda equazione:
y = 0
y = c1
y = c1t+ c2
y(0) = 0 + c2 = 0
⇒ c2 = 0
y(0) = c1 = 0
⇒ c1 = 0
y(t) = 0 la traiettoria giace su xz
Si integra la prima equazione, sfruttando anche la terza:
x = −2ωz
x = −2ωz + c
x(0) = −2ωz(0) + c = 0 + c = 0
⇒ c = 0
x = −2ωz
⇒ z = −g + 2ω · (−2ωz)
= −g−4ω2z︸ ︷︷ ︸trasc.
' −gz = −gt
z = −g t2
2
⇒ x = ωgt2
x = ωgt3
3+ c
x(0) = ωg ·0
3+ c = 0
⇒ c = 0
x(t) = ωgt3
3deviazione della verticale verso oriente
In funzione della quota z si puo scrivere:
x =ω
3√g
· (−2z)32 oppure x =
ω
3√g
· (2h)32 con h = −z
4.5 - Sistemi di riferimento inerziali e non. Forze d’interazione e apparenti 55

Fisica generale CC© BY:© $\© =©
4.6 Terzo principio della dinamica
Secondo quanto enunciato nel principio di azione e reazione si puo dedurre che:
• le due forze (quella di azione e quella di reazione) agiscono su corpi diversi;
• le due forze sono di interazione: quindi sono a due a due opposte e con la medesimaretta di azione.
Le forze interne a un sistema in analisi sono forze di interazione tra le parti del sistemameccanico: sono a due a due opposte, con retta d’azione comune (coppie di braccio nullo).Allora il terzo principio si puo scrivere:
~R(i) = ~0~M(i)
(0) = ~0 (per qualunque centro di riduzione)
dove l’indice (i) rappresenta le sole forze (e i relativi momenti) interne al sistema.La definizione non vale per le forze esterne, infatti:
1. tra le forze esterne si considerano le forze apparenti, alle quali non si applica ilprincipio;
2. le forze esterne sono dovute ad altri corpi non facenti parte del sistema: quindi, inogni coppia di braccio nullo, una forza agisce sul sistema e l’altra sul corpo esterno,con risultante non necessariamente nulla.
Il sistema considerato e isolato (meccanicamente) se le forze esterne sono assenti, oppurese hanno risultante e momento risultante entrambi nulli. Dalla statica, un corpo rigidoisolato e in equilibrio.
4.6.1 Principı di conservazione
Per un sistema isolato costituito da due punti materiali si possono enunciare alcuni principı.
Proprieta 4.4. Le uniche due forze interne sono una coppia di braccio nullo.
Proprieta 4.5. La quantita di moto si conserva durante il moto.
Proprieta 4.6 (Momento angolare (o della quantita di moto)). Poiche ~Q di un puntomateriale e un vettore applicato, se ne puo calcolare il momento rispetto al centro diriduzione O:
~K = (P −O)×m~v momento angolare
Il momento angolare, o momento della quantita di moto, e calcolato per un punto di massam e velocita ~v. Scomponendo un sistema in n parti puntiformi si generalizza:
~K =
n∑i=1
(Pi −O)×mi~vi momento angolare totale
Durante il moto, ~K rimane costante.
4.6.2 Equazioni cardinali della dinamica
Derivando il momento della quantita di moto ~K:
~K =
n∑i=1
(~vi − ~vo)×mi~vi +
n∑i=1
(Pi −O)×mi~ai︸ ︷︷ ︸~Fi
=
n∑i=1
~vi ×mi~vi︸ ︷︷ ︸~0
−~vo ×n∑i=1
mi~vi︸ ︷︷ ︸~Q
+
n∑i=1
(Pi −O)× ~Fi︸ ︷︷ ︸~M(O)
= −~vo × ~Q+ ~M(O)
56 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Se consideriamo le somme:~Q = ~R(i)︸︷︷︸
~0
+ ~R(e) = ~R(e)
⇒ ~K = −~vo × ~Q+ ~M(i)(O)︸ ︷︷ ︸~0
+ ~M(e)(O) = −~vo × ~Q+ ~M(e)
(O)
Se il centro di riduzione e fisso, o la sua velocita e vo // ~Q, allora le equazioni cardinalidella dinamica assumono la forma:
~Q = ~R(e)
~K(O) = ~M(e)(O)
(4.6.1)
Definizione 17 (Sistema isolato). Un sistema e isolato se sono entrambe verificate leseguenti condizioni:
~R(e) = ~0 ⇒ ~Q costante~M(e)
(0) = ~0 ⇒ ~K costante
4.6.3 Urti
Definizione 18 (Urto). Due corpi, che si muovono con velocita diverse, interagiscono e,in un intervallo di tempo molto breve rispetto al contesto, modificano sostanzialmente leproprie velocita.
Le forze d’urto agiscono per un tempo molto breve. Prima e dopo l’urto le forze sonoassenti: se i corpi non sono soggetti ad altre forze, essi si muovono di moto rettilineouniforme.
Nei problemi d’urto non si e interessati alla dinamica dell’interazione, ma solo allarelazione tra le quantita dinamiche prima e dopo l’urto. Le forze che agiscono durantel’urto tra due corpi (non vincolati) sono forze interne al sistema formato dai due corpi.L’intensita delle forze d’urto e tanto maggiore quanto minore e l’intervallo di tempo in cuile forze agiscono: ∫ t2
t1
~F dt = ~Q(t2)− ~Q(t1)
⟨~F⟩
=1
t2 − t1
∫ t2
t1
~F dt =~Q(t2)− ~Q(t1)
t2 − t1
Prima e dopo l’urto, le forze esterne non impulsive7 devono essere considerate, ma pos-sono essere trascurate durante l’urto (sistemi quasi-isolati). Se sono presenti vincoli, leforze vincolari esterne non possono essere trascurate perche durante l’urto hanno carattereimpulsivo e possono essere molto intense.
Esempio: urto di un pallone contro un muro. Un pallone viene lanciato contro unmuro (figura 4.14(a)).
1. Il sistema “pallone” (figura 4.14(b)) non e isolato: ~Q non si conserva perche la forzad’urto e una forza esterna.
2. Il sistema “pallone + muro” (figura 4.14(c)) non e isolato: ~Q non si conserva perchela reazione vincolare che ancora il muro a terra e una forza esterna.
3. Il sistema “pallone + muro + Terra” (figura 4.14(d)) e isolato: ~Q si conserva perchetutte le forze sono interne. Il globo terrestre ha un piccolissimo rinculo.
Proprieta 4.7. In presenza di una forza vincolare esterna si conserva il momento angolare,riferito al punto di applicazione della reazione vincolare.
7Ad esempio, la forza peso.
4.6 - Terzo principio della dinamica 57

Fisica generale CC© BY:© $\© =©
(a) Urto (b) Sistema “pallo-ne”
(c) Sistema “pallone+ muro”
(d) Sistema “pallone+ muro + Terra”
Figura 4.14: Urto di un pallone contro un muro
Esempio: sbarra vincolata a ruotare attorno a O. Si conserva solo il momentoangolare rispetto al centro di riduzione O. La forza esterna (cioe la reazione vincolare) ha
momento nullo rispetto a O. Non si conserva ne ~Q, ne il momento angolare rispetto adaltri centri di riduzione.
Esempio: urto colineare di due punti materiali. Due punti materiali, in motosull’asse x l’uno verso l’altro, vengono a contatto urtandosi (figura 4.15).
(a) Situazione prima dell’urto (b) Situazione dopo l’urto
Figura 4.15: Urto colineare
• Prima dell’urto: v01x − v02x > 0;
• dopo l’urto: v1x − v2x ≤ 0.
Poiche si deve mantenere la quantita di moto, e le masse sono costanti, allora devemantenersi una relazione tra le velocita:
v1x − v2x = −e · (v01x − v02x) con 0 ≤ e ≤ 1
e e il coefficiente di restituzione, che dipende solo dal tipo di interazione (ad es. dal tipo dimateriale delle sferette). A seconda del valore di e si classificano i tipi di urto (tabella 4.1).
e = 0 Urto perfettamente anelastico − mat. facilmente deformabiliI due corpi procedono uniti dopo l’urto − conficcamentocon la stessa velocita − dispositivi a scatto
0 ≤ e ≤ 1 Urto parzialmente elastico-anelasticoNon si conserva l’energia meccanica
e = 1 Urto perfettamente elastico − elettroni (microsc.)Si conserva l’energia meccanica − avorio(caso limite) − vetro
− acciaio
Tabella 4.1: Classificazione degli urti in base al coefficiente di restituzione e
Significato fisico del coefficiente di restituzione. Come esperimento si puo consi-derare un cursore che urta contro un ostacolo fisso (cioe con velocita nulla). Si hanno iseguenti parametri:
58 4 - Dinamica

Fisica generale CC© BY:© $\© =©
• ti: istante di inizio urto;
• t0: istante in cui il cursore e fermo;
• tf : istante di fine urto;
• ~F0: forza sul cursore nella prima parte dell’urto (da ti a t0);
• ~F : forza8 sul cursore nella seconda parte dell’urto (da t0 a tf );
• m: massa del cursore.
Si puo applicare il teorema dell’impulso all’urto:∫ t0
ti
~F0 dt = −m~v0 ,
∫ tf
t0
~F dt = m~v
Per semplificare, dato che l’urto avviene colinearmente lungo l’asse x, si puo riscriveretutto con le sole componenti in direzione di x:∫ t0
ti
F0x dt = −mv0x ,
∫ tf
t0
Fx dt = mvx
In questo modo si trova la definizione di e.
Definizione 19 (Coefficiente di restituzione). Il coefficiente di restituzione, caratteristicodi un urto, e il rapporto tra gli impulsi (proiettati nella direzione del moto) della forza diripristino e della forza sul cursore prima dell’urto:
e = − vxv0x
=
∫ tf
t0
Fx dt∫ t0
ti
F0x dt
Definizione 20 (Urto elastico). Un urto elastico (e = 1) e caratterizzato da forze ugualiprima e dopo l’urto, perche sono uguali le deformazioni.
Definizione 21 (Urto anelastico). Un urto anelastico (e = 0) e caratterizzato da forzadi ripristino completamente assente, per cui i due corpi procedono uniti dopo l’urto, conmedesima velocita.
Previsione dell’esito dell’urto. Si conserva la quantita di moto:
m1v1x +m2v2x = m1v01x +m2v02x
⇒
v1x =
m1 − e ·m2
m1 +m2v01x +
m2(1 + e)
m1 +m2v02x
v2x =m1(1 + e) ·m2
m1 +m2v01x +
m2 − e ·m1
m1 +m2v02x
In caso di urto perfettamente anelastico (e = 0) le due velocita dopo l’urto sono uguali esono la media pesata delle velocita iniziali:
v1x = v2x =m1
m1 +m2v01x +
m2
m1 +m2v02x
In caso di urto perfettamente elastico (e = 1) le due velocita dopo l’urto non sono uguali:v1x =
m1 −m2
m1 +m2v01x +
2m2
m1 +m2v02x
v2x =2m1
m1 +m2v01x +
m2 −m1
m1 +m2v02x
Se i due corpi hanno massa uguale (m1 = m2), allora essi si scambiano le velocita dopol’urto:
v1x = v02x
v2x = v01x
8Detta anche “forza di ripristino”, perche dovuta alla tendenza dei materiali a riassumere la propriaforma originaria dopo una deformazione.
4.6 - Terzo principio della dinamica 59

Fisica generale CC© BY:© $\© =©
Conservazione dell’energia cinetica. Negli urti perfettamente elastici si conserval’energia cinetica.
Tf =1
2m1v1x
2 +1
2m2v2x
2 , Ti =1
2m1v01x
2 +1
2m2v02x
2
In generale:
Tf = Ti −(1− e2)m1m2
2(m1 +m2)· (v01x − v02x)2
• Quando l’urto e perfettamente elastico, cioe con e = 1, l’energia cinetica si conservadopo l’urto perche Tf = Ti.
• Quando l’urto non e perfettamente elastico, cioe con e < 1, si perde energia nell’urtoperche Tf < Ti.
4.6.4 Centro di massa
Definizione 22 (Centro di massa). In un sistema, diviso in n punti materiali di posizionePi e massa mi, si definisce il centro di massa G:
G−O =
n∑i=1
mi(Pi −O)
n∑i=1
mi
Il punto O e arbitrario. Quando O ≡ G, allora∑ni=1mi(Pi −G) = ~0.
Definizione 23 (Centro di massa). In un corpo omogeneo si puo ottenere il centro dimassa integrando:
G−O =1
V
∫V
(P −O) dV
oppure scomponendo9 lungo gli assi cartesiani, considerando la massa totale M :
xG =1
M
n∑i=1
mixi
yG =1
M
n∑i=1
miyi
zG =1
M
n∑i=1
mizi
Proprieta 4.8. Il centro di massa coincide col baricentro quando il sistema occupa unospazio ristretto, in modo che ~g sia costante al suo interno: in tal caso, i vettori-peso deipunti materiali sono paralleli tra loro, quindi si puo definire il baricentro.
Proprieta 4.9. Derivando la definizione di centro di massa si ottiene la sua velocita:
~vG =1
M
n∑i=1
mi~vi
che genera ~Q = M ·~vG, cioe la quantita di moto totale di un sistema e sempre uguale alprodotto della massa totale per la velocita del centro di massa.
Poiche ~Q e ~vG sono sempre paralleli, allora se scelgo G come centro di riduzione (per cal-colare i momenti) allora ottengo le equazioni cardinali della dinamica nella forma semplice(4.6.1).
9Si calcolano le medie pesate delle coordinate, lungo gli assi cartesiani.
60 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Teorema 5 (del moto del baricentro). Il centro di massa si muove come se fosse unpunto materiale, avente la massa totale del sistema e sottoposto a tutte le forze esterneagenti sul sistema:
~R(e) = M ·~aG
Dimostrazione. Derivando la definizione di ~Q prima ottenuta si ricava:
~Q = M ·~aG = ~R(e)
Il teorema del moto del baricentro e analogo alla legge ~F = m~a, quindi la schematizzazione(cioe la riduzione a punto materiale di un intero sistema) puo essere fatta per corpi e sistemidi qualunque dimensione e massa.
(a) Arco di circonferenza (b) Settore circolare
Figura 4.16: Determinazione del centro di massa
Determinazione del centro di massa di un arco di circonferenza (in materiale
omogeneo). Si considera un arco_
AB con centro O, raggio r e angolo al centro 2α(figura 4.16(a)). Poiche l’oggetto e omogeneo e simmetrico, G si trovera sulla bisettrice di
AOB (asse x).Il volume dell’arco e: V = 2αrσ, dove σ e l’area dell’arco.Intorno a P il volume infinitesimo e: dV = σr dϕ.Dalla proiezione su x si ricava:
xG =1
2αrσ
∫ α
−αr cosϕ · rσ dϕ = r
senα
α
con l’angolo α espresso in radianti.
Determinazione del centro di massa di un arco di circonferenza (in materialeomogeneo). Si considera un settore circolare con centro O, raggio r e angolo al centro2α (figura 4.16(b)). Poiche l’oggetto e omogeneo e simmetrico, G si trovera sulla bisettrice
di AOB (asse x).Si puo suddividere il settore circolare in infiniti settori circolari di angolo al centro
infinitesimo: questi sono equivalenti a triangoli isosceli (lati uguali di lunghezza r, base dilunghezza infinitesima). Ogni triangolo isoscele ha G sull’altezza, distante 2
3r dal vertice.Tutti i G di tutti i triangoli formano, quindi, un arco di circonferenza di raggio 2
3r: allora,G dista da O una distanza:
d =2
3r ·
senα
α
4.6 - Terzo principio della dinamica 61

Fisica generale CC© BY:© $\© =©
4.6.5 Momento angolare dei corpi rigidi
Si sceglie un centro di riduzione O solidale col corpo rigido, oppure direttamente il suocentro di massa. Dato che O e fisso succede che:
1. ~K = −~v0 × ~Q︸ ︷︷ ︸~0
+ ~M(e) = ~M(e);
2. si puo applicare la formula dei moti rigidi: ~vP = ~vO + ~ω × (P −O).
Allora:
• con O: ~vi = ~vO︸︷︷︸~0
+~ω × (Pi −O) = ~ω × (Pi −O);
• con G: ~vi = ~vG + ~ω × (Pi −G).
Nella definizione di momento angolare:
~K(O) =
n∑i=1
(Pi −O)×mi ·[~ω × (Pi −O)
]=
n∑i=1
mi · (Pi −O)×[~ω × (Pi −O)
]Analogamente, ma col centro di massa:
~K(G) =
n∑i=1
mi · (Pi −G)×[~vG + ~ω × (Pi −G)
]=
[n∑i=1
mi · (Pi −G)
]︸ ︷︷ ︸
M(G−G)=0
×~vG +
n∑i=1
mi · (Pi −G)×[~ω × (Pi −G)
]
=
n∑i=1
mi · (Pi −G)×[~ω × (Pi −G)
]quindi il momento angolare di un corpo rigido dipende da ~ω del corpo, ma non dallavelocita di G (~vG).
~K(O) e ~K(G) sono formalmente uguali, ma:
• ~K(O) vale solo quando il moto e rotatorio;
• ~K(G) vale per un moto qualsiasi.
Invece del vettore momento angolare, si puo calcolare la componente nella direzione dellavelocita angolare. Si definisce:
ϕ: angolo di rotazione;
u : versore diretto come ~ω (col verso assunto da ~ω quando ϕ cresce).
Allora ~ω = ϕ · u. Si sceglie un generico centro di riduzione C (che sia, o meno, il centro dimassa):
~K(C) = ϕ ·n∑i=1
mi · (Pi − C)×[u× (Pi − C)
]
62 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Per ottenere la componente Ku (secondo il versore u), cioe il momento angolare assiale, simoltiplica tutto per u:
Ku = ϕ · u ·
[n∑i=1
mi · (Pi − C)×[u× (Pi − C)
]]
= ϕ ·n∑i=1
u ·mi · (Pi − C)×[u× (Pi − C)
]= ϕ ·
n∑i=1
mi · u× (Pi − C) ·[u× (Pi − C)
]= ϕ ·
n∑i=1
mi ·[u× (Pi − C)
]2︸ ︷︷ ︸
I
= I · ϕ
dove I e il momento d’inerzia.
4.6.6 Momento d’inerzia e raggio d’inerzia
Definizione 24 (Momento d’inerzia). Il momento d’inerzia fornisce una misura dell’iner-zia del corpo rispetto alle variazioni del suo stato di moto rotatorio.
In un corpo, suddiviso in n punti materiali, si definisce il momento d’inerzia rispetto auna certa retta:
I =
n∑i=1
mi · ri2
con ri la distanza del punto i−esimo dalla retta scelta. Tale definizione e valida anche concorpi non rigidi.
In un sistema continuo, suddiviso in infiniti volumetti infinitesimi, I dipende dallageometria del corpo e dalla sua densita ρ:
I =
∫V
r2ρ dV =M
V
∫V
r2 dV
Definizione 25 (Raggio d’inerzia). Il raggio d’inerzia (o di girazione) esprime il legametra il momento d’inerzia e la massa del corpo:
δ =
√I
M⇒ I = Mδ2
Un punto materiale fittizio, posto a distanza δ dalla retta scelta come riferimento eavente la massa dell’intero corpo, ha lo stesso momento d’inerzia di quel corpo. In uncorpo omogeneo, δ dipende dalla geometria del corpo, al pari di I:
δ2 =1
V
∫V
r2 dV
Teorema 6 (di Huygens-Steiner). Per un corpo qualsiasi, il momento d’inerzia rispet-to a una retta r (Ir) e uguale al momento d’inerzia rispetto alla retta g, parallela a r epassante per il centro di massa (Ig), aumentato del prodotto della massa totale (M) per ilquadrato della distanza tra le due rette (d2):
Ir = Ig +M · d2
4.6 - Terzo principio della dinamica 63

Fisica generale CC© BY:© $\© =©
Dimostrazione. Si sceglie un SdR che abbia come origine il centro di massa G.
Ir =
n∑i=1
mi · r2i
=
n∑i=1
mi · (x2i + y2
i )
=
n∑i=1
mi ·[(xi − d)2 + y2
i
]=
n∑i=1
mi · (x2i + y2
i + d2 − 2xid)
= Ig +M · d2−2d
n∑i=1
mi ·xi︸ ︷︷ ︸0
= Ig +M · d2
L’ultima sommatoria si annulla perche il centro di massa ha coordinate nulle(e origine):
xG =1
M
n∑i=1
mixi = 0 ⇒n∑i=1
mixi = 0
infatti sicuramente M 6= 0.
Corollario 7. Coi raggi d’inerzia: δr2 = δG
2 + d2.
Proprieta 4.10. Il momento angolare di un sistema meccanico rispetto ad un punto Oe uguale al momento angolare del sistema rispetto al suo centro di massa, piu il momentoangolare del centro di massa rispetto ad O:
~K(O) = ~K(G) + (G−O)× ~Q
= ~K(G) + (G−O)×M ·~vG
Proprieta 4.11. Il momento angolare di un sistema meccanico e legato al suo momentod’inerzia dalla relazione:
~K = ω · I
4.6.7 Dinamica dei sistemi
Si studia dinamicamente un sistema meccanico tramite le equazioni cardinali della dina-mica.
1. Si usa il teorema del moto del baricentro:
~R(e) = M ·~aG
2. La seconda equazione Ku = I · ϕ vale per un corpo rigido con centro di riduzionefisso e solidale, o coincidente, col centro di massa. Se si aggiunge l’ipotesi di velocitaangolare di direzione costante, allora:
˙u = ~0 quando ~ω 6= ~0
Se si deriva Ku si hanno dei vantaggi, infatti si dimostra che I e costante. Allora:
~K · u = I · ϕ cioe M(e)u = I · ϕ
che vale solo nel moto di corpi rigidi in cui l’asse di rotazione rimane parallelo a sestesso.
64 4 - Dinamica

Fisica generale CC© BY:© $\© =©
4.7 Esempi di applicazione delle equazioni cardinalidella dinamica
4.7.1 Pendolo composto
Definizione 26 (Pendolo composto). Corpo rigido pesante, vincolato a ruotare intornoad un asse fisso orizzontale non passante per il baricentro.
Si considera un pendolo composto (figura 4.17) che abbia:
• M : massa del corpo;
• h: distanza del baricentro (G) dall’asse di rotazione (O);
• ϕ: rotazione rispetto all’equilibrio.
Figura 4.17: Pendolo composto
Applicando M(e)u = I · ϕ, con centro di riduzione in O, avendo il peso come unico
contribuente al momento assiale:
IOϕ = −Mgh · senϕ
dove IO e il momento d’inerzia del corpo rispetto a O. Allora, sfruttando l’equazione
differenziale del pendolo semplice e ponendo l =δO
2
h::
ϕ+gh
δO2 senϕ = 0 ⇒ ϕ+
g
lsenϕ = 0
dove la seconda equazione e l’equazione differenziale del pendolo semplice equivalente aquello dato. L’equivalenza tra il pendolo semplice e quello composto riguarda solo il moto(al variare di ϕ): infatti, gli oggetti sono diversi, e cosı le forze vincolari.
Si calcola il moto del baricentro, sfruttando le forze vincolari:
~R+M~g = M~aG
G si muove lungo una circonferenza di raggio h. Intrinsecamente, con s = h ·ϕ:Rt −Mg senϕ = Mhϕ componente tangenzialeRn −Mg cosϕ = Mhϕ2 componente normale
Sviluppando i calcoli si ottiene:Rt = Mg
(1− h2
δO2
)senϕ
Rn = Mh
(ωO
2 − 2gh
δO
)+Mg
(1− 2h2
δO2
)cosϕ
4.7 - Esempi di applicazione delle equazioni cardinali della dinamica 65

Fisica generale CC© BY:© $\© =©
Figura 4.18: Pendolo di Kater
4.7.2 Pendolo di Kater
Il pendolo di Kater e un pendolo ad assetto variabile, nel quale e possibile scegliere l’assedi rotazione (uno dei due coltelli) e la disposizione delle masse tramite manicotti scorrevoli(figura 4.18).
Rispetto al coltello superiore (o, rispettivamente, inferiore) sono calcolabili, per ogniconfigurazione dei manicotti:
• il raggio d’inerzia δ1 (o δ2);
• la distanza h1 (o h2) dal baricentro G;
• la lunghezza del pendolo semplice equivalente l1 (o l2);
• i periodi delle piccole oscillazioni T1 (o T2).
Sistemando opportunamente i manicotti si vuole ottenere:
T1 = T2 ⇒ l1 = l2 ⇒ δ12
h1=δ2
2
h2
Secondo Huygens-Steiner, definendo δ il raggio d’inerzia baricentrale si puo scrivere:
δ2 + h12
h1=δ2 + h2
2
h2⇒ δ2(h2 − h1) = h1h2(h2 − h1)
Per la diversa distribuzione delle masse si ha che h1 6= h2, allora δ2 = h1h2, inoltre:
l1 = l2 = h1 + h2 = l del pendolo equivalente e comune
Dalla misura di T = T1 = T2 delle piccole oscillazioni si ricava il modulo g dell’accelerazionedi gravita terrestre:
g =4π2l
T 2
4.7.3 Rotolamento puro
Si considera un corpo rigido di massa M , con bordo circolare di raggio r, che rotola lungouna guida rettilinea fissa di inclinazione α (figura 4.19).
Con la terna di assi opportunamente scelta: MxG = Mg senα−RtMyG = 0MzG = −Mg cosα+Rn
66 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Figura 4.19: Rotolamento puro
~Rt e la forza vincolare che impedisce lo slittamento (attrito radente), mentre ~Rn e la forzavincolare dovuta all’appoggio. Integrando due volte yG = 0:
yg(t) = 0 cioe G si muove nel piano xz
A causa del vincolo, G si muove lungo l’asse x (zG(t) = 0), allora zG = 0. La terzaequazione puo essere riscritta come:
Rn = Mg cosα
Poiche anche il bordo del corpo giace in xz, la velocita angolare e diretta sempre come
l’asse y, cioe ha direzione costante. Applicando M(e)u = Iϕ e scegliendo G come centro di
riduzione si riscrive:
Mδ2ϕ = r ·Rt
dove:
• δ: raggio d’inerzia del corpo rispetto alla retta, passante per G, parallela a y;
• ϕ: rotazione del corpo rispetto alla configurazione di partenza.
Dunque Rt =Mδ2ϕ
r. Sostituendo nella prima equazione:
MxG =Mg senα−Mδ2ϕ
r
xG +δ2ϕ
r= g senα
cioe il moto non dipende dalla massa totale. xG e ϕ non sono indipendenti:
xG = rϕ ⇒ xG = rϕ
Allora:
xG +δ2
r·xGr
= g senα ⇒ xG =g senα
1 +δ2
r2
cioe l’accelerazione di G e costante: il moto e rettilineo uniformemente accelerato. Per
questo motivo, anche ϕ =xGr
e costante. Allora si puo ricavare Rt:
Rt =Mg senα
1 +r2
δ2
(costante)
4.7 - Esempi di applicazione delle equazioni cardinali della dinamica 67

Fisica generale CC© BY:© $\© =©
(a) Rappresentazioneschematica
(b) Caso particolarecon molla di ritenzione
Figura 4.20: Carrucola mobile [1]
4.7.4 Carrucola mobile
Si considera una carrucola mobile, la quale ha l’asse di rotazione non vincolato ad es-sere fisso (figura 4.20(a)). La carrucola e omogenea, quindi il suo centro C coincide colbaricentro.
In equilibrio:
FB =1
2FC , T =
1
2FC
Si considera l’esempio di figura 4.20(b), nel quale:
• ~FB → ~F dovuto alla molla ideale;
• ~FC →M~g dovuto solo al peso;
• ~T → ~R (vincolo dinamico).
Per la legge di Hooke, in equilibrio: kb =1
2Mg, dove con b e indicato l’allungamento della
molla (cioe lo spostamento del punto B).
Si porta la carrucola a una quota z0 <b
2, sopra l’origine, e la si abbandona. Le
condizioni iniziali sono: zC(0) = z0
zC(0) = 0
C si muove sempre lungo l’asse z. Per il teorema del moto del baricentro ( ~R = M~aG):
F +R−Mg = MzC
Il disco giace sempre sul piano verticale, quindi la velocita angolare ha direzione costante:
allora si puo applicare M(e)u = I · ϕ.
F · r −R · r = Iϕ
• C: centro di riduzione;
• I: momento d’inerzia rispetto alla retta passante per C;
• ϕ: angolo che misura le rotazioni.
Si puo collegare ϕ a zC tramite una relazione cinematica: zC = rϕ, quindi anche zC = rϕ.Per un settore circolare omogeneo vale la relazione:
IO =1
2Mr2 ⇒ F −R =
1
2MzC
68 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Si crea un sistema con le relazioni trovate e si sommano le equazioni membro a membro:F +R−Mg = MzC
F −R =1
2MzC
2F −Mg =3
2MzC
La forza di Hooke in generale e F = k(b− 2zC), allora si puo riscrivere:
2kb− 4kzC − Mg︸︷︷︸2kb
=3
2MzC
(semplific. con espressione di equilibrio)
3
2MzC + 4kzC = 0
MzC +8
3kzC = 0 moto armonico
centro di oscillazione: origine
pulsazione:
√8k
3M
Dopo aver calcolato le costanti di integrazione:
zC = z0 cos
(√8k
3Mt
)
zC = rϕ ⇒ ϕ =z0
rcos
(√8k
3Mt
)
R = MzC − F +Mg
= M ·(− 8k
3MzC
)− kb+ 2kzC +Mg
= − 8k
3M·M · z0 cos
(√8k
3Mt
)− 1
2Mg + 2kz0 cos
(√8k
3Mt
)+Mg
=1
2Mg − 2k
3z0 cos
(√8k
3Mt
)
Nota 4.7.1. In generale,∣∣∣~R∣∣∣ 6= ∣∣∣~T ∣∣∣ =
Mg
2.
Nota 4.7.2. R 6= F nel caso dinamico, mentre invece T = FB nel caso statico.
4.7.5 Apparecchio di Fletcher
Si considerano due corpi rigidi (figura 4.21(a)):
• P1 (di massa m1) vincolato a traslare orizzontalmente;
• P2 (di massa m2) vincolato a P1 tramite una cordicella ideale, tesa e passante peruna carrucolina.
Si ipotizza che tutti i vincoli siano ideali.Entrambi i corpi si muovono traslando, quindi P1 e P2 sono assimilabili a punti
materiali.Il sistema di riferimento viene scelto con origine O nella posizione in cui, in quiete,
sono nulle sia l’ascissa di P1 sia la quota di P2:
x1(0) = z2(0) = 0
La cordicella e inestensibile, quindi il moto dei due corpi segue la legge: x1(t) = z2(t).
Si applica separatamente il teorema del moto del baricentro (~R(e) = M~aG):
4.7 - Esempi di applicazione delle equazioni cardinali della dinamica 69

Fisica generale CC© BY:© $\© =©
(a) Rappresentazione schematica (b) Dettaglio della carrucola
Figura 4.21: Apparecchio di Fletcher [1]
• per P1: T1 = m1x1 , R = m1g;
• per P2: m2g − T2 = m2z2.
Nota 4.7.3. La carrucolina puo causare T1 6= T2, allora si cerca la differenza tra le due tensioni sfruttando
la legge M(e)u = Iϕ e il baricentro G della carrucola come centro di riduzione (figura 4.21(b)). Il vincolo
che tiene fermo l’asse di rotazione e ideale, quindi si annulla il momento assiale delle forze vincolari:
~S︸︷︷︸ris. forze vincolari
+m~g − ~T1 − ~T2 = 0
La carrucolina e un cilindro rigido omogeneo, di massa m e raggio r, quindi:
I =mr2
2⇒ (T2 − T1)r =
1
2mr 2ϕ ⇒ T2 − T1 =
1
2mrϕ
Se m e sufficientemente piccola, allora T1 = T2. Si suppone, allora, m→ 0, quindi e garantito T1 = T2.
Avendo determinato le caratteristiche della carrucola, dopo aver definito l’uguaglianzadelle derivate della relazione del moto dei due corpi si ottiene un sistema di equazioni,risolubile sommandole membro a membro.
x1(t) = z2(t) ⇒ x1(t) = z2(t) ⇒ x1(t) = z2(t)T1 = m1x1
m2g − T2 = m2z2
T1 +m2g −T2 = m1x1 +m2z2
x1 · (m1 +m2) = m2g ⇒ x1 = z2 =m2g
m1 +m2
cioe i due corpi traslano con moto rettilineo uniformemente accelerato. Durante il motola cordicella e tesa, e la forza di tensione vale:
T1 = T2 =m1m2g
m1 +m2
4.7.6 Apparecchio di Atwood
Si considera una carrucola fissa con appesi due corpi rigidi di masse m1 e m2 (figura 4.22).La carrucola e un cilindro rigido omogeneo di raggio r, ma con massa M non trascurabile.
Entrambi i corpi si muovono traslando, quindi sono assimilabili a punti materiali (P1
e P2). Si sceglie un SdR con origine O alla quota iniziale di P1; per semplicita, si supponeche anche P2 parta dalla medesima quota iniziale. Dato che la cordicella e inestensibile,le condizioni iniziali e le relazioni del moto sono:
z1(0) = z2(0) = 0z1(t) = −z2(t)
70 4 - Dinamica

Fisica generale CC© BY:© $\© =©
Figura 4.22: Apparecchio di Atwood [1]
Del tutto analogamente a quanto visto per la carrucola dell’apparecchio di Fletcher si ha:
(T2 − T1) · r =1
2Mr 2ϕ ⇒ T2 − T1 =
1
2Mrϕ
Si suppone ϕ = 0 per l’istante iniziale t = 0, infatti ϕ e z1 sono legati da una relazionecinematica:
z1 = rϕ ⇒ z1 = rϕ ⇒ z1 = −z2 = rϕ
Si applica il teorema del moto del baricentro, separatamente alle sole componenti sull’assez, e poi si sottraggono le equazioni membro a membro:
T1 −m1g = m1z1
T2 −m2g = m2z2
T1 −m1g − T2 +m2g = m1z1 −m2z2
−(T2 − T1)− g(m1 −m2) = z1(m1 +m2)
−1
2Mrϕ− rϕ(m1 +m2) = −g(m2 −m1)
rϕ
(M + 2m1 + 2m2
2
)= g(m2 −m1)
Da questa relazione si ottengono le componenti di accelerazione e tensione ricercate:z1 = z2 = rϕ =
2g(m2 −m1)
M + 2m1 + 2m2
T1 =(4m2 +M)m1g
M + 2m1 + 2m2
T2 =(4m1 +M)m2g
M + 2m1 + 2m2
Nota 4.7.4. T1 e T2 sono diverse, ma costanti.
In conclusione:
• se m1 = m2, l’apparecchio di Atwood e in equilibrio e non c’e moto;
• se m1 6= m2 e presente un moto traslatorio uniformemente accelerato per P1 e P2 (simuove verso il basso il corpo piu pesante), mentre la carrucola si muove con motorotatorio uniformemente accelerato.
4.7 - Esempi di applicazione delle equazioni cardinali della dinamica 71

Fisica generale CC© BY:© $\© =©
4.7.7 Ingranaggio
Si considerano due ruote dentate (figura 4.23(a)), assimilabili a due dischi rigidi omogeneicomplanari:
• il disco 1 di centro A, raggio r, massa m;
• il disco 2 di centro B, raggio R, massa M .
Tutti i vincoli sono ideali. Ogni ruota e vincolata a ruotare attorno ad un asse fisso,passante per il suo centro. I dentini delle due ruote si incastrano per impedire lo slittamentodel bordo del disco rispetto all’altro, nel punto di contatto:
A−B = r +R
Il disco 1 ruota di un angolo ϕ crescente in senso antiorario, mentre il disco 2 ruota di unangolo Φ crescente in senso orario. Gli archi di circonferenza corrispondenti a ϕ e Φ sonosempre uguali, a causa del vincolo imposto, quindi rϕ = RΦ (10).
Si applica al disco 1 una coppia di forze con momento assiale M variabile nel tempo(M = C · t, dove C e un coefficiente costante). Si vogliono trovare ϕ, Φ e T (modulo di~T , forza tangenziale con cui ogni disco agisce sull’altro nel punto di contatto) in funzionedel tempo.
(a) Ruote dentate (b) Forze agenti sul disco 1
di centro A(c) Forze agenti sul disco 2 dicentro B
Figura 4.23: Ingranaggio [1]
L’ingranaggio e inizialmente fermo, quindi le condizioni iniziali sono:ϕ(0) = 0Φ(0) = 0
,
ϕ(0) = 0
Φ(0) = 0
Si applicano ad ogni disco le relazioni M(e)u = Iϕ e I =
1
2mr2 (figure 4.23(b) e 4.23(c)):
M− Tr =1
2mr2ϕ
TR =1
2MR2Φ
Il sistema puo essere riscritto applicando le proprieta assunte come ipotesi e sommando leequazioni membro a membro:
Ct− Tr =1
2mr2ϕ
TR =1
2MR · rϕ
Ct− Tr + T =1
2rϕ(mr +M)
rϕ =2Ct− 2T (r − 1)
mr +M
10Quindi sono uguali anche le derivate in ogni ordine, tra cui rϕ = RΦ, altrimenti scrivibile comeϕ = R
rΦ.
72 4 - Dinamica

Fisica generale CC© BY:© $\© =©
T =1
2Mrϕ =
1
2M 2Ct− 2T (r − 1)
mr +M
=MCt−MT (r − 1)
mr +MT (mr +M) + TM(r − 1) = MCt
T (mr +M +Mr −M) = MCt
T =MCt
r(m+M)
Adesso si puo procedere col calcolo di ϕ:
rϕ =2Ct− 2 MCt
r(m+M) · (r − 1)
mr +M
=2Ct
(1− M(r−1)
r(m+M)
)mr +M
=2Ct r(m+M)−M(r−1)
r(m+M)
mr +M
=2Ct rm+rM−Mr+M
r(m+M)
mr +M
=2Ct rm+M
r(m+M)
mr +M
=2Ct
r(m+M)
ϕ =2Ct
r2(m+M)
Integrando e sfruttando le condizioni iniziali:
ϕ(t) =2C
r2(m+M)·t2
2+ k1
ϕ(0) = k1 = 0
ϕ(t) =Ct2
r2(m+M)
ϕ(t) =C
r2(m+M)·t3
3+ k2
ϕ(0) = k2 = 0
ϕ(t) =Ct3
3r2(m+M)
Φ(t) =r
R·ϕ(t)
=Ct3
3Rr(m+M)
4.7 - Esempi di applicazione delle equazioni cardinali della dinamica 73

Fisica generale CC© BY:© $\© =©
74 4 - Dinamica

CAPITOLO 5
Lavoro ed energia
Definizione 27 (Energia). L’energia di un corpo e la sua capacita di produrre un lavoro.
Definizione 28 (Lavoro). Il lavoro e compiuto tutte le volte che si attua un processo ditrasferimento di energia da un corpo ad un altro.
Definizione 29 (Macchina). Una macchina e un dispositivo vincolato capace di spostareil punto di applicazione di una forza resistente, sfruttando un’altra forza (motrice). In certicasi, il procedimento e possibile usando forze motrici di modulo molto inferiore rispettoalle forze resistenti.
5.1 Lavoro
Il lavoro compiuto da una forza ~F , con punto di applicazione P che si sposta lungo unalinea ` di estremi A e B, si ricava dai seguenti passi:
1. si suddivide la linea in infiniti tratti infinitesimi: ogni tratto e un vettore spostamentoinfinitesimo (dP );
2. durante uno spostamento infinitesimo, ~F subisce una variazione trascurabile: dun-que, ~F rimane costante in dP ;
3. il lavoro infinitesimo svolto su un tratto infinitesimo vale:
dL = ~F · dP
4. il lavoro totale L(A`B) lungo l’intera linea si ottiene sommando i contributi dei varitratti infinitesimi:
L(A`B) =
∫(A`B)
~F dP integrale di linea
Nel caso particolare in cui ~F sia costante e ` sia rettilinea, allora l’integrale si semplificain:
LAB = ~F · (B −A)
Nota 5.1.1. In tabella 5.1 sono riportate le unita di misura del lavoro nei principali sistemi di unita dimisura.

Fisica generale CC© BY:© $\© =©
Unita derivata SimboloSistema Internazionale N · m J [joule]Sistema CGS dyn · cm ergSistema tecnico Kgf · m Kgm [chilogrammetro]
Tabella 5.1: Unita di misura del lavoro
Figura 5.1: Lavoro di una molla
Esempio: lavoro di una molla. Si considera una molla con costante elastica k elunghezza a riposo l0 (figura 5.1). Per quanto riguarda la molla e noto che:
~F = −k ·xi ⇒ dP = dx i
Il lavoro della forza elastica e:
L12 =
∫(P1P2)
~F dP
= −k ·∫ (l2−l0)
(l1−l0)
x dx
= −1
2k(l2 − l0)2 +
1
2k(l1 − l0)2
5.1.1 Lavoro di un gruppo di forze
Date n forze, il lavoro complessivo e la somma dei singoli lavori di ogni forza:
LAB =
n∑i=1
∫(Ai`iBi)
~Fi dPi
dove:
• Pi: punto di applicazione;
• Ai: posizione iniziale di Pi;
• Bi: posizione finale di Pi;
• `i: linea seguita da Pi.
Se diverse forze sono applicate ad un corpo rigido, si puo dedurre una formula piu semplice.
1. Si considera un generico movimento infinitesimo (rototraslatorio).
2. Si indica con u un versore diretto come ~ω, con dϕ l’angolo della parte rotatoria delmovimento infinitesimo.
Allora:
~ω =dϕ
dtu
76 5 - Lavoro ed energia

Fisica generale CC© BY:© $\© =©
Con la formula fondamentale dei corpi rigidi, chiamando P un punto solidate al corpo, lavelocita del punto di applicazione generico Pi e:
dPidt
=dP
dt+dϕ
dtu× (Pi − P )
cioe:dPi = dP + u× (Pi − P ) · dϕ
Il lavoro infinitesimo complessivo di tutte le ~Fi e:
dL =
n∑i=1
~Fi dPi
=
n∑i=1
~Fi dP +
n∑i=1
~Fi · u× (Pi − P ) · dϕ
=
(n∑i=1
~Fi
)︸ ︷︷ ︸
~R
dP + u ·
[n∑i=1
(Pi − P )× ~Fi
]︸ ︷︷ ︸
~M(P )
· dϕ
= ~R dP + ~M(P )u dϕ
In generale:
LAB =
∫ PB
PA
~R dP +
∫ ϕB
ϕA
~M(P )u dϕ
Se il corpo si muove traslando (ϕ = 0), allora lo si tratta come un punto materiale ancheper il lavoro delle forze. Se, invece, il corpo ruota attorno ad un asse fisso, P si trovasull’asse di rotazione: allora dP = 0 e:
L12 =
∫ ϕ2
ϕ1
Mu dϕ
con Mu = ~M(P )u che e il momento assiale risultante.
5.1.2 Principio dei lavori virtuali
Le forze vincolari, con ipotesi di vincolo ideale, hanno caratteristiche sempre diverse. Ladefinizione di lavoro consente di trovare una caratteristica comune a tutti i vincoli ideali.
Come ipotesi preliminare, si suppone che lo spostamento del punto di applicazione Psia infinitesimo. In questo modo:
1. la forza varia in maniera infinitesima, per cui la sua variazione e trascurabile;
2. lo spostamento infinitesimo e un vettore, anche se la traiettoria di spostamento fossecurvilinea.
Definizione 30 (Spostamento virtuale). Lo spostamento virtuale δP di un punto diapplicazione P e uno spostamento infinitesimo di P , compatibile con i vincoli.
Nota 5.1.2. In generale, δP 6= dP (lo spostamento virtuale e diverso dallo spostamento effettivamentesvolto). δP indica solo la possibilita di movimento, quindi esiste sempre; al contrario, dP puo essere nulloquando non c’e effettivo moto di P .
Definizione 31 (Sistema di spostamenti virtuali). Un sistema di spostamenti virtuali δPi(con i = 1, 2, . . . , n) e definito per n forze, ciascuna col suo punto di applicazione e il suospostamento virtuale δPi.
Nota 5.1.3. Un sistema di spostamenti virtuali non e banale: alcuni spostamenti virtuali possono essereconsiderati separatamente, ma non assieme altri che produrrebbero effetti fisici che violano le leggi1.
1Ad esempio, un’asta rigida posta verticalmente puo essere sottoposta ad uno spostamento virtualeverso l’alto, oppure verso il basso (in questi casi trasla rigidamente), ma i due spostamenti non sono unsistema perche se considerati contemporaneamente l’asta (rigida!) dovrebbe allungarsi o accorciarsi.
5.1 - Lavoro 77

Fisica generale CC© BY:© $\© =©
Definizione 32 (Spostamento virtuale invertibile). Uno spostamento virtuale δP e in-vertibile se anche l’opposto −δP e virtuale.
Nota 5.1.4. Il concetto e estendibile al sistema di spostamenti virtuali.
Definizione 33 (Vincolo unilaterale). Un vincolo e unilaterale se esistono alcuni sposta-menti (o sistemi di spostamenti) virtuali che non sono invertibili.
Definizione 34 (Vincolo bilaterale). Un vincolo e bilaterale se tutti gli spostamenti (osistemi di spostamenti) virtuali sono invertibili.
Definizione 35 (Lavoro virtuale). Un lavoro virtuale e il lavoro compiuto da una forzacorrispondente ad uno spostamento virtuale dal suo punto di applicazione.
Nota 5.1.5. Il lavoro virtuale e sempre infinitesimo.
Teorema 8 (Principio dei lavori virtuali). In un sistema meccanico, se i vincoli sonoideali, l’insieme di tutte le n forze vincolari compie un lavoro virtuale totale che e nullo perqualunque sistema di spostamenti virtuali invertibili nei punti di applicazione delle forze:
n∑i=1
~Ri · δPi = 0
5.1.3 Teorema della forze vive
Il teorema delle forze vive descrive il lavoro compiuto da tutte le forze che agiscono su unqualunque sistema meccanico.
Teorema 9 (delle forze vive). Il lavoro compiuto dalle forze su un sistema meccanico,passando da una configurazione A ad una B, e pari alla corrispondente variazione dienergia cinetica del sistema:
LAB = TB − TA
Dimostrazione. Si suddivide il sistema in n parti puntiformi (Pi) di massa mi
e in moto con velocita ~vi, accelerazione ~ai, soggette a forze ~Fi (risultante ditutte le forze su Pi). Il lavoro totale e:
dL =
n∑i=1
~Fi dPi =
n∑i=1
mi~ai dPi
Dividendo per dt e operando algebricamente:
dL =
n∑i=1
mi~aidPidt
dt
=
n∑i=1
mid~vidt
·~vi dt
=
n∑i=1
mi1
2·d
dt
(~vi ·~vi
)dt
=1
2·
n∑i=1
mi
d(~v2i
)dt
dt
Poiche le masse sono considerate costanti:
dL =d
dt
(1
2
n∑i=1
mivi2
)dt
78 5 - Lavoro ed energia

Fisica generale CC© BY:© $\© =©
Integrando fra un istante (della configurazione A) e uno successivo (in cui ilsistema e in configurazione B), definendo l’energia cinetica:
T =1
2
n∑i=1
mivi2
allora LAB = TB − TA.
5.1.4 Energia cinetica. Teoremi di Konig
Definizione 36 (Energia cinetica). Per un punto materiale di massa m che si muove convelocita v e possibile definire l’energia da esso posseduta a causa del moto:
T =1
2m · v2
Per un corpo esteso, l’energia cinetica e la somma di tutti i contributi delle partipuntiformi. Tale energia e cinetica perche dipende dalle velocita dei punti considerati.Avendo le dimensioni fisiche del lavoro, ne conserva le unita di misura (tabella 5.1).
Come si nota dalla definizione, l’energia cinetica non e mai negativa: al limite puoessere nulla, solo se tutti i punti del sistema sono fermi.
Teorema 10 (di Konig). L’energia cinetica di un corpo puo essere espressa come som-ma tra l’energia cinetica del suo baricentro e l’energia cinetica del corpo relativamente albaricentro:
T =1
2M · vG2 +
1
2
n∑i=1
mi ·wi2
Dimostrazione. Si definisce la velocita relativa al baricentro del punto Pi:
~wi = ~vi − ~vG i = 1, 2, . . . , n
Algebricamente:
T =1
2
n∑i=1
mi~v2i
=1
2
n∑i=1
mi
(~vG + ~wi
)(~vG + ~wi
)=
1
2
n∑i=1
mi
(vG
2 + wi2 + 2~vG · ~wi
)=
1
2vG
2n∑i=1
mi︸ ︷︷ ︸M
+1
2
n∑i=1
mi ·wi2 + ~vG
n∑i=1
mi · ~wi︸ ︷︷ ︸~0 per def. di G
=1
2M · vG2 +
1
2
n∑i=1
mi ·wi2
Teorema 11 (di Konig per un corpo rigido). L’energia cinetica di un corpo rigidopuo essere espressa come somma tra l’energia cinetica del moto traslatorio e l’energiacinetica del moto rotatorio, entrambi riferiti al centro di massa G:
T =1
2M · vG2 +
1
2Ig ·ω2
5.1 - Lavoro 79

Fisica generale CC© BY:© $\© =©
Dimostrazione. Applicando il teorema di Konig ad un corpo rigido:
~wi = ~ω × (Pi −G)
Scegliendo un versore u diretto come ~ω:
1
2
n∑i=1
miwi2 =
1
2ω2
n∑i=1
mi [u× (Pi −G)]2
︸ ︷︷ ︸Ig
Ig e il momento d’inerzia rispetto alla retta g passante per G, parallela a ~ω.Sostituendo il secondo membro dell’equazione appena scritta nella formula diKonig si ottiene l’espressione per i corpi rigidi.
Se il corpo ruota attorno ad un asse fisso e si sceglie O sull’asse (~vO = ~0):
~vi = ~ω × (Pi −O)
T =1
2ω2
n∑i=1
mi
[u× (Pi −O)
]2︸ ︷︷ ︸
IO
⇒ T =1
2IOω
2
Questo non e un caso particolare della formula generale: non e detto che G sia sull’asse dirotazione.
5.1.5 Esempi di applicazione del teorema delle forze vive
Macchine ideali e macchine reali
In una macchina, il lavoro della forza resistente e l’opposto del lavoro della forza motrice:quindi, il lavoro complessivo di tutte le forze e nullo. Questa affermazione e vera sotto dueipotesi:
1. i vincoli sono tutti ideali;
2. l’energia cinetica totale e costante durante tutto il funzionamento.
Se l’energia cinetica puo variare, allora:∣∣∣lavoro resistente∣∣∣ > ∣∣∣lavoro motore
∣∣∣quindi il lavoro totale delle forze attive e negativo, cioe diminuisce l’energia cinetica.
Esempio. Si suppone di avere un punto materiale, di peso ~p, trascinato versol’alto dalla forza motrice ~F lungo un piano inclinato di un angolo α, con velocita
costante ~v: quindi, l’energia cinetica e costante
(T =
mv2
2
). Su una certa
distanza s il lavoro totale e nullo:
F · s− p · s · senα = 0
Se si sopprime ~F , il moto prosegue su un successivo s1, a spese dell’energiacinetica posseduta, finche non si annulla (cioe il punto si ferma). In s1 il lavoromotre e nullo, il lavoro resistente e negativo (energia cinetica perduta):
−p · s1 · senα = −1
2mv2
Se i vincoli non sono ideali, sperimentalmente si osserva che il lavoro delle forze vincolari e,in totale, negativo. Quindi, per poter usare a regime una macchina reale, il lavoro motoredeve essere maggiore del lavoro resistente.
80 5 - Lavoro ed energia
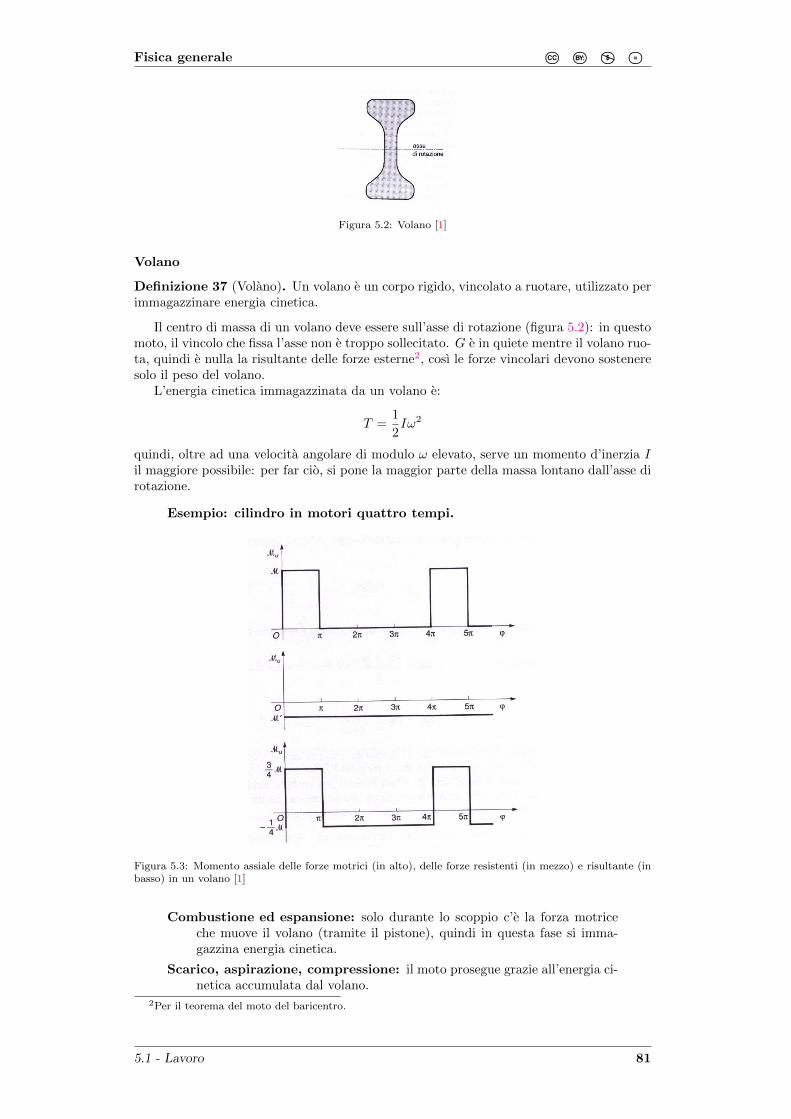
Fisica generale CC© BY:© $\© =©
Figura 5.2: Volano [1]
Volano
Definizione 37 (Volano). Un volano e un corpo rigido, vincolato a ruotare, utilizzato perimmagazzinare energia cinetica.
Il centro di massa di un volano deve essere sull’asse di rotazione (figura 5.2): in questomoto, il vincolo che fissa l’asse non e troppo sollecitato. G e in quiete mentre il volano ruo-ta, quindi e nulla la risultante delle forze esterne2, cosı le forze vincolari devono sosteneresolo il peso del volano.
L’energia cinetica immagazzinata da un volano e:
T =1
2Iω2
quindi, oltre ad una velocita angolare di modulo ω elevato, serve un momento d’inerzia Iil maggiore possibile: per far cio, si pone la maggior parte della massa lontano dall’asse dirotazione.
Esempio: cilindro in motori quattro tempi.
Figura 5.3: Momento assiale delle forze motrici (in alto), delle forze resistenti (in mezzo) e risultante (inbasso) in un volano [1]
Combustione ed espansione: solo durante lo scoppio c’e la forza motriceche muove il volano (tramite il pistone), quindi in questa fase si imma-gazzina energia cinetica.
Scarico, aspirazione, compressione: il moto prosegue grazie all’energia ci-netica accumulata dal volano.
2Per il teorema del moto del baricentro.
5.1 - Lavoro 81

Fisica generale CC© BY:© $\© =©
Si considerano due differenti momenti (figura 5.3):
• il momento assiale M delle forze vincolari motrici sul volano (nella fasedi combustione ed espansione);
• il momento assiale M′ delle forze resistenti sul volano (costanti).
In un periodo, l’energia cinetica e uguale all’inizio e alla fine: quindi, lavariazione di energia cinetica e nulla e tale e anche il lavoro totale3∫ π
0
M dϕ+
∫ 4π
0
M′ dϕ = 0
M ·π +M′ · 4π = 0
M′ = −1
4M
• Nella prima fase: M+M′ > 0, cioe T aumenta;
• dalla seconda alla quarta fase: M+M′ < 0, cioe T diminuisce.
Nella prima fase si puo applicare il teorema delle forze vive:∫ π
0
3
4M dϕ =
1
2Iω1
2︸ ︷︷ ︸a fine fase (massimo)
− 1
2Iω0
2︸ ︷︷ ︸a inizio fase (minimo)
⇒ ω12 − ω0
2 =3πM
2I
Se ω =ω0 + ω1
2allora ω1 − ω0 =
3πM4Iω
.
Quando I e molto grande, la differenza tra il massimo e il minimo di ω e minore, cioe ilmoto prosegue in modo piu uniforme.
3Per il teorema delle forze vive.
82 5 - Lavoro ed energia

Fisica generale CC© BY:© $\© =©
5.2 Equazione simbolica della statica
Teorema 12 (Equazione simbolica della statica). Un sistema meccanico (a vincoliideali e bilaterali) e in equilibrio se e solo se si annulla il lavoro virtuale totale delle forzeattive, per qualunque sistema di spostamenti virtuali dei punti di applicazione delle forze:
n∑i=1
~Fi · δPi = 0
Dimostrazione della condizione necessaria. Per ipotesi, tutti i punti Pi riman-gono in quiete in una certa configurazione:
~Ri = −~Fi con i = 1, 2, . . . , n
Per cui il principio dei lavori virtuali diventa:
n∑i=1
~Ri · δPi = −n∑i=1
~Fi · δPi = 0
Dimostrazione della condizione sufficiente. Esiste una configurazione definitaper la quale vale l’equazione simbolica della statica. Si abbandonano i puntiPi in quella configurazione; per ogni sistema di spostamenti permesso accadeche:
• le forze attive compiono un lavoro complessivamente nullo (vale l’equa-zione simbolica della statica);
• le forze vincolari compiono un lavoro complessivamente nullo (per il prin-cipio dei lavori virtuali).
Il lavoro totale di tutte le forze e nullo, quindi l’energia cinetica non puo variaree rimane nulla (teorema delle forze vive). Quindi, tutti i punti Pi rimangonofermi in quella configurazione, che e di equilibrio.
In tabella 5.2 e riportato un confronto tra le equazioni cardinali e l’equazione simbolicadella statica, per quanto riguarda le ipotesi poste sul problema e le forze da considerarenell’applicazione.
Eq. cardinali Eq. simbolicaIpotesi − rigidita − vincoli ideali e bilaterali
− vincoli anche non ideali − sistema meccanico anche non rigidoApplicazione → forze solo esterne → forze solo attive
(sia vincolari, sia attive) (sia interne, sia esterne)
Tabella 5.2: Confronto tra le equazioni caratteristiche della statica
5.2.1 Esempi di applicazione dell’equazione simbolica della statica
Serie di aste rigide incernierate agli estremi e nei punti medi
Si considera una serie di aste rigide (tutte di lunghezza l) incernierate negli estremi comunie nei punti di mezzo (figura 5.4).
• L’intera struttura giace sul piano xy.
• La cerniera A e fissa. La cerniera C e vincolata a scorrere lungo una guida orizzontale.
• I vincoli sono tutti ideali e bilaterali.
5.2 - Equazione simbolica della statica 83

Fisica generale CC© BY:© $\© =©
• Una molla ideale (con lunghezza a riposol
2e posta tra A e B.
• Una forza ~F , se applicata sulla molla, la allungherebbe del 20%:
F = k ·l
2· 0, 20 =
kl
10
Quanto e lunga la molla quando il sistema e in equilibrio?
Figura 5.4: Struttura articolata ad aste incernierate con un grado di liberta [1]
Ogni configurazione e caratterizzata solo da un parametro, cioe la distanza A − B.Quindi c’e un solo grado di liberta, equivalente a:
• una sola equazione in un’incognita, con l’equazione simbolica della statica;
• 24 equazioni in 24 incognite con le equazioni cardinali della statica (23 delle qualidovute ai vincoli).
Le forze attive da considerare sono:
• ~F in C;
• la forza elastica della molla in B (quella in A non fa lavoro, perche A e vincolato).
Le forze peso non sono da considerare, perche non fanno lavoro essendo spostamentiorizzontali.
Gli spostamenti virtuali di B e C sono sempre diretti come x. Scegliendo come variabileindipendente xB :
xC = 3xBδxC = 3 δxB
,
δB = δxB · iδC = 3 δxB · i
L’equazione simbolica della statica e:
n∑i=1
~Fi · δPi = −k(xb −
l
2
)· δxB + F · 3 δxB = 0
xB =l
2+
3F
k
che deve valere per ogni δxB , quindi δxB 6= 0. Con la forza assegnata:
xB =4
5l
Coppia di aste rigide incernierate
Si considera una coppia di aste rigide incernierate in un estremo comuni (figura 5.5).
• L’asta di centro A ha massa m e lunghezza l.
• L’asta di centro B ha massa M e lunghezza L.
• L’intera struttura giace sul piano xz.
• La cerniera O e fissa (origine del sistema di riferimento).
84 5 - Lavoro ed energia

Fisica generale CC© BY:© $\© =©
Figura 5.5: Struttura articolata ad aste incernierate con due gradi di liberta [1]
Quale forza ~F bisogna applicare per mantenere l’equilibrio assegnato (cioe gli angoli α eβ scelti)?
Ogni configurazione e caratterizzata dai due parametri angolari α e β. Quindi ci sonodue gradi di liberta, equivalenti a:
• due equazioni in due incognite, con l’equazione simbolica della statica;
• 6 equazioni con le equazioni cardinali della statica.
Le forze attive da considerare sono:
• ~F in C;
• le forze peso, anche applicate ai baricentri in A e B.
L’equazione simbolica della statica e:
n∑i=1
~Fi · δPi = m~g · δA+M~g · δB + ~F · δC = 0
Le coordinate in x di δA e δB non contano: il prodotto scalare col peso (che e verticale,quindi ortogonale a x) e sempre nullo.
zA = − l2
cosα
zB = −l cosα− L
2cosβ
xC = l senα+ L senβzC = −l cosα− L cosβ
Si differenzia tutto per ottenere gli spostamenti virtuali:δzA = − l
2senα δα
δzB = l senα δα+L
2senβ δβ
δxC = l cosα δα+ L cosβ δβδzC = l senα δα+ L senβ δβ
Allora l’equazione simbolica della statica diventa:
−mg l2
senα δα−Mgl senα δα−MgL
2senβ δβ+
+ Fxl cosα δα+ FxL cosβ δβ + Fzl senα δα+ FzL senβ δβ = 0(Fxl cosα+ Fzl senα−mg l
2senα−Mgl senα
)· δα = 0(
FxL cosβ + FzL senβ −MgL
2senβ
)· δβ = 0
Fx l cosα+ Fz l senα = mgl
2senα+Mgl senα
FxL cosβ + FzL senβ = MgL
2senβ
5.2 - Equazione simbolica della statica 85

Fisica generale CC© BY:© $\© =©
Si nota subito che ~F non dipende da l o L.Con le due aste non allineate si hanno tre possibilita di soluzione.
1. Asta l orizzontale: α = 90 ⇒
cosα = 0senα = 1
Fz =mg
2+Mg
Fx =Mg2 senβ − senβ
(mg2 +Mg
)cosβ
= tgβ
(Mg
2− mg
2−Mg
)= − (M +m)g
2tgβ
2. Asta L orizzontale: β = 90 ⇒
cosβ = 0senβ = 1 Fx =
mg2 senα+Mg senα− senα · Mg
2
cosα= − (M +m)g
2tgα
Fz =Mg
2
3. Aste non orizzontali: Fx =
(M +m)g tgα tgβ
2( tgβ − tgα)
Fz =
((2M +m) tgα−M tgβ
)· g
2( tgα− tgβ)
86 5 - Lavoro ed energia

Fisica generale CC© BY:© $\© =©
5.3 Il lavoro di forze conservative
5.3.1 Lavoro delle forze peso
La forza peso svolge un lavoro su un sistema meccanico qualunque, mentre esso passa dauna configurazione A ad un’altra configurazione B. Si considerano:
• g costante;
• M (massa totale) scomposta in n punti Pi di massa mi.
I punti Pi si spostano lungo linee `i, da A fino a B. Allora, in generale:
LAB =
n∑i=1
∫(Ai`iBi)
mi~g dPi
Se si fissa un asse z ascendente si puo riscrivere usando il solo modulo di ~g:
LAB =
n∑i=1
∫(Ai`iBi)
mi · (−g) dzi
= −g ·n∑i=1
mi
∫(Ai`iBi)
dzi
= −g ·
[n∑i=1
mi · zi(B)−
n∑i=1
mi · zi(A)
]Per il baricentro vale:
zG =1
M
n∑i=1
mi · zi ⇒ LAB = −M · g ·[zG(B)− zG(A)
]︸ ︷︷ ︸
hg oppure ∆z
cioe il lavoro compiuto dalla forza peso non dipende dalla traiettoria percorsa `, ma solodalla variazione di quota del baricentro. Per questo motivo, il peso e un tipico caso diforza conservativa.
(a) Su piano inclinato (b) Su piano incurvato
Figura 5.6: Lavoro della forza peso
5.3.2 Forze posizionali
Le forze che dipendono esplicitamente da velocita o tempo non sono conservative.
Definizione 38 (Forza posizionale). Una forza posizionale dipende solo dalla posizione.
La zona dello spazio in cui si muove il punto4 e dominio della funzione che associa allaposizione la forza subita in cui punto. Il vettore forza, espresso in funzione della posizione,e un campo di forza.
Il campo e vettoriale se, analogamente, grandezze vettoriali sono espresse in funzionedella posizione in un dominio.
Per le forze posizionali si puo scrivere, lungo una linea `:
LA`B) = −L(B`A) def. di integrale curvilineo
4Cioe nella quale varia la propria posizione.
5.3 - Il lavoro di forze conservative 87

Fisica generale CC© BY:© $\© =©
5.3.3 Campi di forza conservativi
Definizione 39 (Campo di forza conservativo). Un campo di forza e conservativo se illavoro compiuto lungo una linea, da A a B, non dipende dalla traiettoria della linea, masolo dagli estremi A e B.
Proprieta 5.1. Se e solo se un campo di forza e conservativo, allora l’integrale curvilineosu una linea chiusa (cioe la circuitazione) e nulla:
~F (P ) conservativo ⇐⇒∮
~F dP = 0
Proprieta 5.2 (Potenziale). Se e solo se un campo di forza e conservativo, allora essoammette potenziale. Il lavoro compiuto dal campo di forza e uguale alla differenza dipotenziale, valutato nei punti estremi:
~F (P ) conservativo ⇐⇒• ∃U(P ) potenziale•LAB = U(B)− U(A)
Proprieta 5.3. Se e solo se un campo di forza e conservativo, allora esso e uguale algradiente del suo potenziale:
~F (P ) conservativo ⇐⇒ ~F = ~∇U
Proprieta 5.4 (Irrotazionalita). Se e solo se un campo di forza e conservativo, allora harotore nullo (solo se e definito su un dominio semplicemente connesso):
~F (P ) conservativo ⇐⇒•definito su dominio sempl. connesso
• ~∇× ~F = ~0
Dimostrazione della condizione necessaria. Se il campo e conservativo, alloraesso e il gradiente di un potenziale. Il rotore di un gradiente e sempre nullo,per definizione.
Dimostrazione della condizione sufficiente. Se il rotore e nullo nel dominio,si puo applicare il teorema di Stokes: il flusso del rotore e nullo, e cosı lacircuitazione. Essendo la circuitazione nulla, allora il campo e conservativo.
Corollario 13 (Irrotazionalita). Un campo di forza conservativo e sempre irrotazionale,mentre un campo di forza irrotazionale non puo essere conservativo se il suo dominio none semplicemente connesso.
5.3.4 Forze e campi gravitazionali
La forza risultante ~F applicata a un punto P (di massa m) dipende dalla sua posizione,
quindi e un campo di forza ~F (P ).
Definizione 40 (Campo gravitazionale). Un campo di forza gravitazionale e un campovettoriale ottenuto dalle forze gravitazionali:
~G(P ) =1
m· ~F (P )
dove m e la massa del punto materiale attraente.
Dimostrazione. Si deve dimostrare he le forze gravitazionali sono conservative.
Un solo punto materiale A (di massa M) genera il campo.
~F (P ) = −γMm
r3· r , ~G(P ) = −γM
r3· r , r = P −A
88 5 - Lavoro ed energia

Fisica generale CC© BY:© $\© =©
Il dominio di esistenza dei campi e semplicemente connesso (sono definitiovunque, tranne che in A). Allora si fissa l’origine in A (5) ottenendo:
Fx = −γ Mm ·x(√x2 + y2 + z2
)3 = m ·Gx
Fy = −γ Mm · y(√x2 + y2 + z2
)3 = m ·Gy
Fz = −γ Mm · z(√x2 + y2 + z2
)3 = m ·Gz
Si calcola il rotore:
~∇× ~F = 0 campo conservativo
Il potenziale di ~F e U(x, y, z) = γMm√
x2 + y2 + z2perche ha le derivate
parziali uguali alle componenti di ~F . In modo analogo si trova il potenzialegravitazionale:
Ug(x, y, z) = γM√
x2 + y2 + z2
Piu facilmente:
U = γMm
r, Ug = γ
M
r, r =
∣∣∣P −A∣∣∣n punti materiali Ai (di masse Mi) generano il campo.
~F (P ) = m~G(P ) = −mγn∑i=1
Mi∣∣∣P −Ai∣∣∣3 · (P −Ai)
Il campo e comunque conservativo.
U(P ) = mUg(P ) = mγ
n∑i=1
Mi∣∣∣P −Ai∣∣∣
Teorema di Gauss per i campi gravitazionali
Si calcola il flusso Φ di un campo gravitazionale ~G(P ), prodotto da un punto materiale Adi massa M e uscente da una superficie chiusa S che contiene A.
Si valuta un elemento di superficie dS, ottenuto intersecando S con un cono di verticeA e apertura infinitesima. La superficie dS ha versore normale n (uscente) in un intornodi P (figura 5.7).
Il cono ha altezza ~r = P −A.
dΦ = ~G(P ) · n dS
= −γMr3r · n dS
= −γMr2
cosϑ dS
= −γM dΩ
Nota 5.3.1. cosϑ dS e l’area infinitesima della calotta intercettata dal cono sulla superficie sferica. Tale
area sottintende un angolo solido, in particolare l’angolo solido infinitesimo del cono e dΩ =cosϑ dS
r2.
5In questo modo, le componenti cartesiane sono in funzione delle coordinate di P ≡ (x, y, z).
5.3 - Il lavoro di forze conservative 89

Fisica generale CC© BY:© $\© =©
Figura 5.7: Superficie chiusa S contenente un punto materiale A che genera un campo gravitazionale [1]
Si nota che il contributo al flusso Φ e indipendente da P − A e da forma e grandezzadi S. Allora si puo integrare per una qualsiasi superficie che contenga A:
Φ = −γM∫S
dΩ︸ ︷︷ ︸4π
= −4πγM
Con piu punti materiali6 si generalizza:
ΦS = −4πγMS t. di Gauss per i campi gravitazionali
Teorema 14. Il campo gravitazionale generato da un corpo sferico di massa M e raggioR (con densita dipendente solo dalla distanza r dal centro C) all’esterno del corpo e ugualeal campo prodotto da un punto materiale di massa M , posto nel centro C.
Dimostrazione. Per simmetria, il campo che agisce su un punto P (esterno alcorpo sferico) e radiale:
~G(P ) = −G(r) · r con ~r = P − C
Se considera una superficie sferica S, di centro C e con raggio r > R (contienetutto il campo al suo interno). Dalla definizione di flusso uscente:
ΦS =
∫S
~G · n dS = −G(r) ·∫S
dS = −4πr2G(r)
Questo risultato e valido solo per distribuzioni di massa a simmetria sferica.Confrontandolo col teorema di Gauss, che invece e generale:
−4πr2G(r) = −4πγM
⇒ G(r) = γM
r2⇒ ~G(r) = −γM
r3r per r > R
come se il corpo sferico fosse un punto materiale posto in C.
Velocita di fuga
Definizione 41 (Velocita di fuga). Velocita minima che occorre imprimere ad un corpoper far sı che si allontani da un altro corpo senza ricadervi.
Si suppone il caso di un’astronave che parte, supera l’atmosfera, finisce il carburante econtinua ad allontanarsi con la minima velocita (di fuga) che consente l’allontanamento.In un generico istante:
1
2mv2 − γMm
x=
1
2mvf
2 − γMm
R
6Bisogna usare la massa totale MS all’interno dalla superficie S.
90 5 - Lavoro ed energia

Fisica generale CC© BY:© $\© =©
vf e il minimo valore che permette a P di giungere ad una distanza x→∞ dal punto O.Con x→∞ rimane:
1
2mv2 =
1
2mvf
2 − γMm
RDato che si vuole minimizzare vf , il primo termine deve assumere il valore minimo e,quindi annullarsi. Quindi c’e conservazione dell’energia meccanica durante il moto:
E(R) = E(∞) ⇒ 1
2mvf
2 = γMm
R
⇒ vf =
√2γM
RIn tabella 5.3 sono riportate le velocita di fuga per la Terra e la Luna.
Terra R ' 6, 40 · 106 mM ' 5, 97 · 1024 kg vf ' 11, 16 · 106 m/s
Luna R ' 1, 738 · 106 mM ' 7, 35 · 1022 kg vf ' 2, 375 · 106 m/sγ ' 6, 67 · 10−11
Tabella 5.3: Velocita di fuga per Terra e Luna
5.4 Conservazione dell’energia
5.4.1 Principi di conservazione
1. Conservazione della quantita di moto:
~R(e) = 0 ⇒ ~Q costante
2. Conservazione del momento angolare (rispetto a un centro di riduzione O fisso):
~M(e)(O) = 0 ⇒ ~K costante
3. Conservazione dell’energia meccanica (con vincoli ideali e forze attive conservative):
E = T + V costante
5.4.2 Conservazione dell’energia meccanica
Si considera un sistema meccanico con vincoli ideali e forze non vincolari conservative:queste forze ammettono un potenziale totale U . Per il teorema delle forze vive, tra unpunto A e un punto B:
LAB = TB − TA = UB − UADefinizione 42 (Energia potenziale). L’energia potenziale e l’opposto del potenziale diuna forza (o di un campo di forza) conservativa:
V = −U
Definizione 43 (Energia meccanica). L’energia meccanica di un sistema e la sommadell’energia cinetica e dell’energia potenziale:
E = T + V
Teorema 15 (della conservazione dell’energia meccanica). In un sistema con vin-coli ideali e forze attive conservative l’energia meccanica, cioe la differenza tra l’energiacinetica il suo potenziale, si conserva:
TA − UA = TB − UB ⇒ TA + VA = TB + VB = T + V = E
In tabella 5.4 sono riportate le energie potenziali di alcune forze interessanti.
5.4 - Conservazione dell’energia 91

Fisica generale CC© BY:© $\© =©
Tipo di forza Forza (~F ) Energia potenziale (V )
Forza costante F · i −F ·xPeso di un punto materiale −m · g · h m · g · zPeso di un corpo M · g · zGForza centrifuga −1
2mω2(x2 + y2)
Forza elastica −k(x− l0)i1
2k(l − l0)2
Forza gravitazionale −γMm
r2r −γMm
r
Tabella 5.4: Energie potenziali delle principali forze di interesse
5.5 Motori e potenza
Definizione 44 (Motore). Un motore e un dispositivo capace di compiere lavoro perchealimentato da una qualche forma di energia.
Definizione 45 (Motore meccanico). Un motore meccanico e un motore che sfrutta unadelle seguenti energie:
• energia cinetica (ad es. da un volano);
• energia potenziale gravitazionale (ad es. da peso, da cadute d’acqua);
• altre forme di energia potenziale (ad es. da molla deformata).
Definizione 46 (Potenza). La potenza e la rapidita con la quale e compiuto un lavoro.
Definizione 47 (Potenza media). La potenza media e la rapidita con cui e stato compiutoil lavoro L nel tempo ∆t:
Wm =L
∆t
Per estensione di concetto allora si puo esprimere una potenza istantanea sulla basedella potenza media:
W = lim∆t→0
Wm =dL
dt
La potenza e una grandezza scalare, caratterizzata dalle unita di misura in tabella 5.5.Comunemente e utilizzato il cavallo vapore per misurare la potenza (le equivalenze con leunita di misura degli altri sistemi sono in tabella 5.6).
Unita derivata SimboloSistema Internazionale J/s W [watt]Sistema CGS erg /s −Sistema tecnico Kgm /s −
Tabella 5.5: Unita di misura della potenza
1 CV 75 Kgm /s 735, 499 W
Tabella 5.6: Misura della potenza in CV
92 5 - Lavoro ed energia

Parte II
Fisica generale L-B:ELETTROMAGNETISMO

CAPITOLO 6
Elettrostatica
Definizione 48 (Triboelettricita). Elettrizzazione di un corpo tramite strofinio.
Definizione 49 (Induzione elettrostatica). Nei materiali conduttori, e possibile caricareun corpo avvicinandone un altro carico, senza contatto ne strofinio. In questo modo non sicreano cariche, ma quelle presenti internamente si dispongono diversamente accumulandosivicino al punto di induzione.
6.1 Carica elettrica
La carica elettrica e la sorgente delle forze elettriche. Con una forte analogia, cosı comela massa gravitazionale e la causa della forza gravitazionale, cosı la carica elettrica generala forza elettrica. Estendendo l’analogia, cariche uguali producono su una terza carica lostesso effetto dinamico, cioe la stessa forza.
Le cariche devono essere considerate puntiformi :
• per evitare il fenomeno di induzione elettrostatica (per cariche non puntiformi eimpossibile stabilire la distanza);
• in pratica, sferette uniformemente cariche si comportano come cariche puntiformitutte concentrate nel centro della sfera.
Si considera la carica elettrica come una grandezza continua; in realta, e un multiplo diun quanto elementare, cioe della carica di un protone o di un elettrone1:
e ' 1, 6 · 10−19 C
L’approssimazione a funzione continua della carica puo essere accettata perche teorica-mente esistono i quark , che hanno carica frazionaria rispetto alla carica elementare.
Proprieta 6.1 (Principio di conservazione della carica elettrica). Un sistema isolato, chenon scambia materia con l’ambiente circostante, mantiene inalterato il proprio valore dicarica elettrica.
6.1.1 Legge di Coulomb
Definizione 50 (Campo di forza coulombiano (modulo)). Due cariche q1 e q2 interagisco-no tra loro con una forza il cui modulo e dipendente dalle cariche stesse e dalla reciprocadistanza:
F =1
4πε0·|q1| · |q2|r2
1Con segno positivo per il protone, con segno negativo per l’elettrone.

Fisica generale CC© BY:© $\© =©
ε0 = 8, 854 · 10−12[
C2
N ·m2
]e la costante dielettrica (o permettivita elettrica) del vuoto.
Se tra le cariche q1 e q2 non e presente il vuoto, ma un fluido omogeneo, bisognasostituire la costante ε0 con ε0εr, dove la seconda costante e la permettivita elettrica delmezzo (relativa).
Figura 6.1: Forza di Coulomb esercitata da q1 su q2 [2]
Definizione 51 (Campo di forza coulombiano). Due cariche q1 e q2 interagiscono traloro con una forza (figura 6.1) il cui modulo e dipendente dalle cariche stesse e dallareciproca distanza; la forza giace nella direzione della congiungente le due cariche, converso attrattivo quando le cariche hanno segno opposto e verso repulsivo quando le carichehanno segno uguale:
~F =q1 · q2
4πε0·~r2 − ~r1
|~r2 − ~r1|3=q1 · q2
4πε0·urr2
6.1.2 Campo elettrostatico nel vuoto
In un punto del vuoto e presente una carica puntiforme fissa Q e l’azione di altre forzeelettriche puo essere trascurata. La presenza di Q altera le proprieta dello spazio, percheQ e sorgente di un campo di forza.
Per verificare l’azione della carica Q, si pone in un punto P nelle vicinanze una caricaesploratrice q: su di essa agira una forza coulombiana ~F = q · ~E. Il campo ~E caratterizzain P le proprieta del campo elettrostatico.
Definizione 52 (Campo elettrostatico coulombiano). Il campo elettrostatico che generala forza coulombiana ha modulo dipendente dalla carica sorgente e dal suo raggio d’azionenello spazio (tra i punti O e P ), oltre alla stessa direzione della retta che congiunge laposizione di Q a quella di P (figura 6.2):
~E =1
4πε0·Q
r2· ur =
Q
4πε0·~r − ~R∣∣∣~r − ~R
∣∣∣3[
N
C
]=
[V
m
]
Figura 6.2: Campo elettrostatico prodotto in P da Q+ [2]
Proprieta 6.2 (Principio di sovrapposizione). La forza con cui due cariche elettricheinteragiscono non viene alterata dalla presenza di altre cariche. La forza dovuta all’inte-razione di piu cariche tra loro e deducibile dalla somma dei singoli contributi delle coppiedi cariche:
~F =
n∑i=1
~Fi =
n∑i=1
q · qi4πε0
·~r − ~ri|~r − ~ri|3
96 6 - Elettrostatica

Fisica generale CC© BY:© $\© =©
Allo stesso modo, per analogia:
~E =
n∑i=1
~Ei
Nota 6.1.1. Per evitare gli effetti di sovrapposizione della carica esploratrice sulla distribuzione delle
sorgenti del campo elettrostatico, e bene specificare il limite ~E = limq→0
~F
q: non da intendersi in senso
matematico (la carica minima e quella elementare), ma nel senso che i fenomeni di induzione da parte diun singolo elettrone possono essere trascurati.
Se la distribuzione di carica e continua e bene usare delle definizioni di densita:
• ρ =dq
dV
[C
m3
]: densita volumetrica di carica (ρ = ρ(~r), dipende dalla posizione);
• σ =dq
dS
[C
m2
]: densita superficiale di carica;
• λ =dq
dl
[Cm
]: densita lineare di carica.
Nota 6.1.2. dq non e un infinitesimo tendente a zero, ma una quantita fisica che indica un contenitore dicariche sufficienti a mantenere costante ρ, σ oppure λ nella rispettiva unita di grandezza geometrica.
Figura 6.3: Campo elettrostatico infinitesimo d ~E prodotto da dq [2]
Definizione 53 (Campo elettrostatico coulombiano infinitesimo). (figura 6.3)
d ~E =dq
4πε0·~r − ~r′∣∣∣~r − ~r′∣∣∣3
Definizione 54 (Campo elettrostatico coulombiano (continuo)).
~E =
∫d ~E =
∫dq
4πε0·~r − ~r′∣∣∣~r − ~r′∣∣∣3
~r e costante per un determinato punto P , mentre ~r′ e diverso per ogni elemento dicarica dq. Supponendo di avere una carica distribuita dentro un volume:
dq = ρ(~r′) dV ′
~E =1
4πε0
∫(~r − ~r′) · ρ (~r′) dV ′
|~r − ~r′|3
Conviene calcolare separatamente le componenti cartesiane di ~E, lungo gli assi:
Ex =1
4πε0
∫(x− x′) · ρ (~r′) dV ′
|~r − ~r′|3
L’introduzione del campo ~E come intermediario permette di separare l’azione dinamicatra cariche in due parti:
6.1 - Carica elettrica 97

Fisica generale CC© BY:© $\© =©
1. un insieme di cariche da origine al campo ~E(~r) nello spazio circostante;
2. il campo produce una forza ~F = q ~E su una carica collocata nello spazio circostante.
Si puo studiare il comportamento di una carica conoscendo ~E(~r) e ignorando come sonofatte le cariche sorgenti.
Definizione 55 (Flusso del campo elettrostatico). Φ(~E)
=
∫~E · n dS
n e il versore normale alla superficie dS, orientato verso l’esterno.
Proprieta 6.3 (Flusso del campo elettrostatico prodotto da una carica puntiforme). Unacarica q nel punto O e il vertice di un cono con angolo infinitesimo dΩ, che intercetta lasuperficie S con una infinitesima dS. Tra dS e dSsfera (superficie perpendicolare all’assedel cono) c’e un angolo α determinato dalle due loro normali. Il campo elettrico e direttolungo l’asse del cono:
dΦ = ~E · n dS
=1
4πε0·q
r2· cosαdS
=q
4πε0·dSsferar2
=q
4πε0· dΩ
dΦ non dipende dall’orientazione di dS, ma solo da dΩ.
Proprieta 6.4 (Legge di Gauss). Il flusso del campo elettrico attraverso una qualunquesuperficie chiusa e uguale alla somma delle cariche interne alla superficie, divisa per ε0:
ΦSC
(~E)
=1
ε0
int∑i
qi =1
ε0
∫int
qi
Dimostrazione. Se la carica e interna, ognuna produce un contributo:
ΦSC
(~E)
=
∮dΦ =
q
4πε0
∮dΩ =
q
ε0
Se la carica e esterna, tracciare un cono significa determinare due contributiche si cancellano vicendevolmente.
Il valore del flusso e proporzionale all’intensita del campo elettrostatico, quindi e rappre-sentabile con delle linee di forza:
• la tangenta alla linea, in ogni punto, ha la direzione del campo in quel punto;
• il verso della linea e lo stesso del campo (si indica con una freccia);
• il numero delle linee tracciate e proporzionale al flusso.
Le linee di ~E cominciano e terminano sulle cariche, che sono sorgenti del campo (figu-ra 6.4).
La formulazione della legge di Gauss puo essere data localmente, in forma differenziale,descrivendo le proprieta del campo in ogni punto in cui e continuo. E possibile farlo colteorema della divergenza, che esprime (nelle regioni di campo continuo) il flusso di un
vettore ~A attraverso una superficie Σ mediante l’integrale della divergenza di ~A, esteso alvolume V che e racchiuso nella superficie.
Teorema 16 (della divergenza).
∮Σ
~A · n dS =
∫V
∇ · ~AdV (2).
2∇ · ~A =∂Ax
∂x+∂Ay
∂y+∂Az
∂z
98 6 - Elettrostatica

Fisica generale CC© BY:© $\© =©
Figura 6.4: Linee di forza del campo elettrostatico per una carica puntiforme positiva (a), negativa (b),per un dipolo elettrico (c), per una lamina piena caricata di segno positivo (d) [2]
Si applica il teorema della divergenza alla legge di Gauss:
1
ε0
∫int
dq = Φ(~E)
=
∮Σ
~E · n dS =
∫V
∇ · ~E dV
La carica elementare e dq = ρ dV , quindi:
1
ε0
∫intdq =
1
ε0
∫Vρ dV e
∫V
(∇ · ~E − ρ
ε0
)dV = 0
⇓∇ · ~E = ρ
ε0
6.1.3 Esperimento di Millikan
Verifica l’ipotesi che la carica dell’elettrone non e ulteriormente suddivisibile.
Figura 6.5: Schema dell’esperimento di Millikan [2]
1. Gocce d’olio (con diametro 4µm) sono emesse da un nebulizzatore e cadono pergravita (figura 6.5).
2. Alcune gocce passano nella parte sottostante, delimitata da due piastre distanti1, 6 cm.
3. Il moto di caduta e il tempo impiegato per percorrere la distanza h = 1, 01 cm eosservato:
• le particelle si sono caricate per strofinio (uscendo dal nebulizzatore);
6.1 - Carica elettrica 99

Fisica generale CC© BY:© $\© =©
• la velocita di regime e determinata dall’equilibrio tra peso e resistenza delmezzo:
F = 6πηrvg = mg per corpi sferici e piccole velocita
(η: viscosita del mezzo).
4. Con un campo elettrostatico di opportuna intensita e verso, le gocce possono essererallentate e fatte risalire:
• intensita circa 500 kN/C;
• verso l’alto;
• q: carica della goccia; vE : velocita a regime.
qE −mg = 6πηrvE ⇒ vgvE
=mg
qE −mg
q =mg
E
(vEvg
+ 1
)5. Misurando per ogni goccia i tempi di salita e discesa si determina che le cariche sono
sempre un multiplo intero di quella elementare (e). Misurando la massa:
e = 1, 64 · 10−19 C per Millikane = 1, 60217733 · 10−19 C oggi noto
Struttura della materia
I componenti della materia sono classificabili per grandezza come in figura 6.6.Proprieta dell’atomo:
1. la massa e quasi tutta contenuta nel nucleo;
2. le dimensioni del nucleo sono molto minori di quelle dell’atomo;
3. nella materia, la maggior parte dello spazio e vuota.
Forze fondamentali della natura
Le forze fondamentali sono attribuite allo scambio di particelle mediatrici (tabella 6.1).
La forza gravitazionale e responsabile del peso dei corpi.
La forza nucleare debole e responsabile di alcune forme di radioattivita.
La forza elettromagnetica e il portatore di forza elettromagnetica (luce, onde radio,raggi X, . . . ).
La forza nucleare forte tiene uniti i quark in protoni, neutroni, . . . e libera energia nellereazioni nucleari.
Forza Forza Forza Forzagravitazionale nucleare debole elettromagn. nucleare forte
Particella scambiata gravitone bosoni vettori fotone gluoneintermedi
G W+,W−, Z0 γ gRaggio d’azione ∞ 10−16 cm ∞ 10−13 cmIntensita a piccoladistanza (10−13 cm) 10−38 10−13 10−2 1
Tabella 6.1: Forze fondamentali della natura
100 6 - Elettrostatica
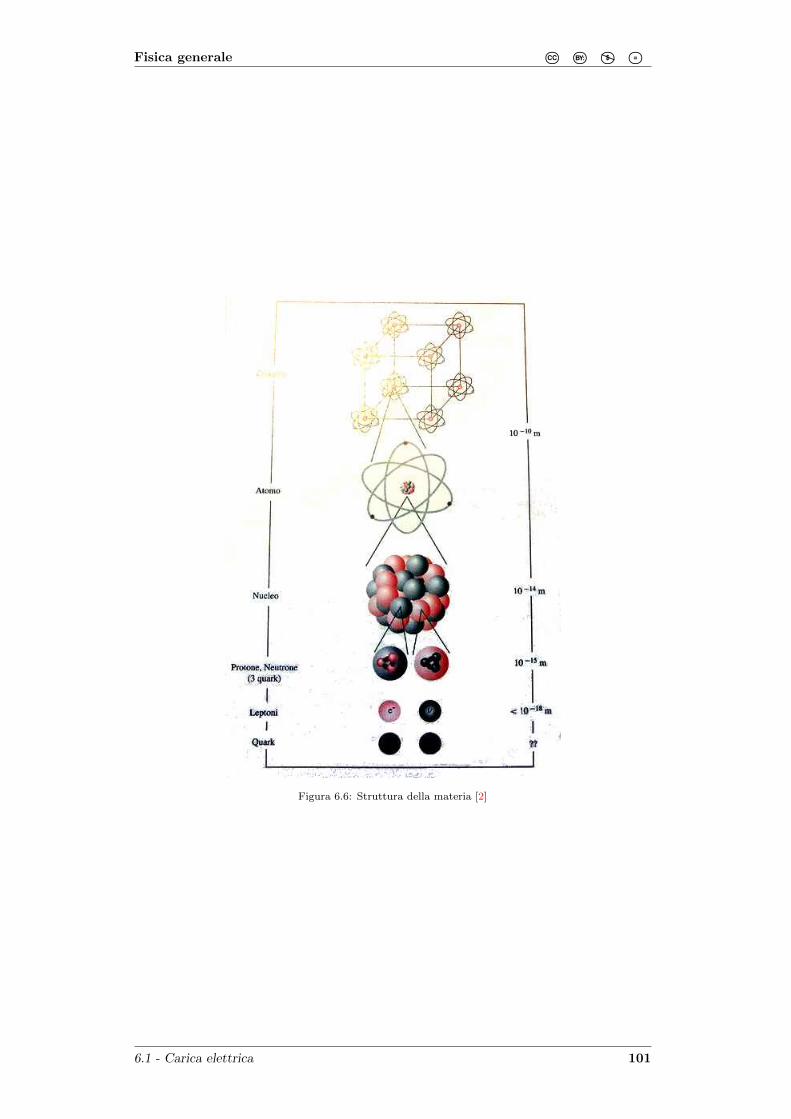
Fisica generale CC© BY:© $\© =©
Figura 6.6: Struttura della materia [2]
6.1 - Carica elettrica 101

Fisica generale CC© BY:© $\© =©
6.2 Potenziale elettrostatico
Il lavoro elementare di ~F = q ~E, relativo ad uno spostamento infinitesimo d~r di q, e:
δL = q ~E · d~r
Il lavoro complessivo lungo una linea γ (da A a B) e:
LAB =
∫ B
Aγ
q ~E · d~r = q ·∫ B
Aγ
~E · d~r
Se il lavoro non dipende da γ, allora la forza e conservativa. Alla stesso modo, un campovettoriale e conservativo se l’integrale di linea e indipendente dalla linea γ. Cio equivale adue proprieta:
1.
∮~E · d~r = 0: la circuitazione e nulla lungo una qualunque linea chiusa;
2. ~E · d~r = −dV : il campo e un differenziale esatto, quindi esiste una funzione scalareV (~r) che e il potenziale del campo:
~E = −∇V ⇒ ∇× ~E = 0 nei punti in cui il campo e differenziabile
Dimostrazione che il campo elettrostatico e conservativo. E sufficiente dimostra-re che e conservativo il campo ~Ei prodotto da una singola carica puntiforme(per il principio di sovrapposizione sara conservativa l’intera distribuzione dicariche in analisi):∮
~E · d~r =
∮ (∑~Ei
)· d~r =
∑i
∮~Ei · d~r = 0
6.2.1 Potenziale del campo coulombiano
Il campo coulombiano e formalmente analogo al campo gravitazionale, quindi e ugualmenteconservativo.
~E · d~r =Q
4πε0r2ur · d~r
=Q
4πε0r2ur ·
(dr ur + r dur
)(figura 6.7(a))
=Q
4πε0r2dr
= −d(
Q
4πε0r
)≡ −dV e un differenziale esatto
Definizione 56 (Potenziale coulombiano in un punto a distanza r dalla sorgente).
V =1
4πε0
Q
r
La costante additiva e scelta in modo che il potenziale sia nullo a distanza infinita dallacarica (V∞ = 0).
Definizione 57 (Differenza di potenziale tra due punti A e B).
V (A)− V (B) =
∫ B
A
~E · d~r =Q
4πε0·[
1
rA− 1
rB
]La differenziale di potenziale e indipendente dalle costanti additive.
102 6 - Elettrostatica

Fisica generale CC© BY:© $\© =©
(a) Componenti radiale e trasversodello spostamento d~r
(b) Potenziale del campo coulom-biano
Figura 6.7: Potenziale elettrostatico [2]
6.2.2 Potenziale del campo prodotto da una distribuzione di ca-riche
In una distribuzione di cariche, ciascuna contribuisce al potenziale (figura 6.7(b)):
Vi (~r) =1
4πε0·
qi|~r − ~ri|
Per il principio di sovrapposizione:∫ B
A
~E · d~r =
∫ B
A
∑i
~Ei · d~r
=∑i
∫ B
A
~Ei · d~r
=∑i
[Vi(A)− Vi(B)
]= V (A)− V (B)
con V (~r) =∑i
1
4πε0·
qi|~r − ~ri|
. Analogamente a quanto visto per il campo di forza
coulombiano:
• l’integrale e esteso a tutto il volume in cui e distribuita la carica;
• dq = σ dS per distribuzioni di carica superficiale;
• dq = λ d` per distribuzioni di carica lineare.
V (~r) =1
4πε0
∫dq
|~r − ~ri|
=1
4πε0
∫ρ (~r) dV ′
|~r − ~ri|
6.2.3 Definizione operativa del potenziale elettrostatico
Esiste un procedimento che prescinde dalla conoscenza della distribuzione delle sorgentie/o dalla conoscenza diretta di ~E in ogni punto.
1. Si considera un oggetto puntiforme mantenuto fermo in A, con carica q abbastanzapiccola da essere esploratrice.
2. Si applicano forze all’oggetto per spostarlo in B, dove lo si ferma.
6.2 - Potenziale elettrostatico 103

Fisica generale CC© BY:© $\© =©
Il lavoro complessivo e nullo perche non e cambiata l’energia cinetica:
LAB = L(el)AB︸︷︷︸
elettriche
+L(al)AB︸︷︷︸
altre
= 0
⇒ q · (VA − VB) = −L(al)AB ⇒ VB − VA =
L(al)AB
q
[J
C= V
]6.2.4 Casi notevoli di calcolo del potenziale
(a) Dipolo elettrico (b) Filo uniformemente carico (c) Filo uniformemente caricodi lunghezza infinita
Figura 6.8: Potenziale elettrostatico di casi notevoli [2]
Potenziale del campo prodotto da un dipolo
V =1
4πε0
[q
d1+(− q
d2
)]=
1
4πε0·q(d2 − d1)
d1d2
Se r d si puo approssimare:
d2 − d1 ' d cosϑ
d1d2 ' r2
⇒ V ' q
4πε0·d cosϑ
r2
~p (figura 6.8(a)) e il vettore momento di dipolo, che ha:
• intensita: qd;
• direzione: congiungente le due cariche;
• verso: dalla carica negativa a quella positiva.
Si puo riscrivere il potenziale in funzione del momento di dipolo:
V ' 1
4πε0·p cosϑ
r2
=1
4πε0·pr cosϑ
r3
=1
4πε0·~p ·~rr3
=1
4πε0·~p · urr2
104 6 - Elettrostatica

Fisica generale CC© BY:© $\© =©
Potenziale del campo prodotto da un filo uniformemente carico
Si considera un filo di lunghezza ` e densita lineare di carica λ (figura 6.8(b)). Si calcolail contributo al potenziale di due tratti elementari di filo, lunghi dz e simmetrici rispettoa P :
dV =λ
2πε0·
dz√r2 + z2
Quando r e costante vale la relazione:
dz√r2 + z2
= d[ln(z +
√r2 + z2
)]Per ottenere il potenziale complessivo si integra dV su z tra 0 e `:
V =λ
2πε0· ln
`+√r2 + z2
r
Potenziale del campo prodotto da un filo uniformemente carico, di lunghezzainfinita
Si porta il V precedente al limite con ` → ∞: diverge per ogni valore di r. Allora sivaluta (per ` finita) la differenza di potenziale tra due punti P1 e P2 molto vicini al filo,con r l:
V ' λ
2πε0· ln
2`
r⇒ V1 − V2 =
λ
2πε0· ln
r2
r1
Nota 6.2.1 (Procedura di rinormalizzazione). Quando le distribuzioni di carica si estendono all’infinito,conviene scegliere lo zero del potenziale “al finito” e applicare la formula:
V (A)− V (B) =
∫ B
A
~E · d~R
Il campo prodotto da un filo vale:
~E =λ
2πε0·
1
ρuρ
dove uρ e la direzione della semiretta perpendicolare al fino, passante per il punto divalutazione, mentre ρ e la distanza dal filo. Si assume potenziale nullo a distanza r0
(figura 6.8(c)) e si calcola l’integrale lungo la semiretta da P0 a P :
VP = VP0 +
∫ P0
P
~E · d~r
= 0 +λ
2πε0
∫ r0
r
dρ
ρ
=λ
2πε0lnr0
r
= − λ
2πε0ln
r
r0
V1 − V2 =λ
2πε0lnr2
r1(tra due punti generici)
Potenziale del campo prodotto da una superficie piana infinitamente estesa
Si dimostra che la differenza di potenziale tra due punti A e B dipende solo dalle lorodistanze dal piano carico (figura 6.9(a)), indipendente dal semispazio3 in cui si trovano:
VA − VB =σ
2ε0(dB − dA)
3Il campo ha versi opposti nei due semispazi.
6.2 - Potenziale elettrostatico 105

Fisica generale CC© BY:© $\© =©
(a) Superficie piana infinita-mente estesa [2]
(b) Doppio strato [2] (c) Doppio strato (potenziale)
Figura 6.9: Potenziale elettrostatico di casi notevoli
Dimostrazione. Usando il versore k il campo vale:
~E = ± σ
2ε0k
La differenza di potenziale tra un punto P (z) e un punto P0 del piano caricoe:
−dV = ~E · d~r = Ez · dz = ± σ
2ε0dz
V (z)− V0 =
∫ 0
z
(± σ
2ε0
)dz
= ∓ σ
2ε0· z
= − σ
2ε0·∣∣∣z∣∣∣
= − σ
2ε0· d
VA − VB =σ
2ε0
(∣∣∣zB∣∣∣− ∣∣∣zA∣∣∣)=
σ
2ε0(dB − dA)
(d e la distanza del punto P dal piano.)
Potenziale del campo prodotto da un doppio strato
All’interno del doppio strato (figura 6.9(b)) il campo ha modulo E =|σ|ε0
, direzione per-
pendicolare ai piani e verso dal piano positivo a quello negativo. All’esterno, il campo enullo. La differenza tra gli strati e:
V+ − V− =|σ|ε0
· d
In tutti i punti a sinistra del piano ⊕ il potenziale e V+; in tutti i punti a destra del piano il potenziale e V− (figura 6.9(c)).
Dimostrazione. Per uno spostamento elementare nella zona interna vale la
relazione ~E · d~r =|σ|ε0
dz, mentre all’esterno si ha ~E · d~r = 0.V (z) = −|σ| · z
ε0+ c, per 0 ≤ z ≤ d
V (z) = c ≡ V+, per z < 0
V (z) = −|σ| · zε0
+ c ≡ V−, per z > d
106 6 - Elettrostatica

Fisica generale CC© BY:© $\© =©
Potenziale del campo presente su una superficie sferica di raggio R
Lo zero del potenziale e all’infinito (V∞ = 0).V =
1
4πε0·Q
r, r > R (campo coulombiano)
V =1
4πε0·Q
R, r ≤ R
Potenziale del campo prodotto da una sfera carica di raggio RV =
1
4πε0·Q
r, r > R (campo coulombiano)
V =1
4πε0·Q
2R·(
3− r2
R2
), r ≤ R
Calcolo del campo dal potenziale
dV = − ~E · d~r →~E · d~r = Ex dx+ Ey dy + Ez dz
dV =∂ V
∂xdx+
∂ V
∂ydy +
∂ V
∂zdz
→
Ex = −∂ V
∂x
[V
m
]Ey = −∂ V
∂y
Ez = −∂ V∂z
~E = −∇V
Si possono calcolare le componenti del campo tramite operazioni di derivazione, se e notoil valore del potenziale in un intorno della posizione di interesse. In generale, scegliendouna direzione ` ed effettuando uno spostamento d`, la componente del campo in quella
direzione e E` = −∂ V∂`
, cioe la derivata direzionale. Con tutte queste relazioni si puo
descrivere un campo in termini di superfici equipotenziali.
Definizione 58 (Superficie equipotenziale). Luogo geometrico dei punti in cui V ha lostesso valore.
Figura 6.10: Superficie equipotenziale [2]
Il campo ~E e perpendicolare alle superfici equipotenziali (figura 6.10). Il modulo delcampo e il valore assoluto della sua derivata direzionale lungo la normale n alla superficieequipotenziale che passa per il punto di valutazione:
E =∣∣∣En∣∣∣ =
∣∣∣∣∂ V∂n∣∣∣∣
A causa del segno meno di E`, il verso del campo e quello lungo il quale il potenzialediminuisce.
6.2.5 Energia potenziale e moto di particelle cariche
La definizione operativa di potenziale elettrostatico VB −VA =L
(al)AB
qpuo essere riconside-
rata in termini di energia.
6.2 - Potenziale elettrostatico 107

Fisica generale CC© BY:© $\© =©
Bisogna trovare nel lavoro svolto dall’esterno sulla carica q l’origine fisica della varia-zione subita dall’energia potenziale elettrica della carica:
U = qV
UB − UA ≡ q(VB − VA) = L(al)AB = −L(el)
AB = L(el)BA
Nota 6.2.2. E impossibile estrarre energia in modo continuativo e ciclico da un campo elettrostatico, adesempio tramite la circolazione di una carica lungo un percorso chiuso: infatti, il campo e conservativo.
Poiche il campo e conservativo, si conserva l’energia meccanica:
1
2mv2 + qV = 0
Quindi la variazione dell’energia cinetica e uguale alla variazione dell’energia potenziale:
∆K =1
2mvB
2 − 1
2mvA
2 = q(VA − VB) = −q · ∆V
Consideriamo particelle cariche ferme nel punto A, allora:
q(VA − VB) =1
2mvB
2 ≥ 0 ⇒ VB − VA e q hanno segno opposto
cioe:
• cariche positive muovono verso posizioni con potenziale minore;
• cariche negative muovono verso posizioni con potenziale maggiore.
Se fra due punti A e B esiste una differenza di potenziale ∆V con VB > VA, quandonel punto A sono immersi elettroni con velocita iniziale trascurabile questi sono acceleratidalle forze del campo e raggiungono B con energia cinetica:
1
2mvB
2 = −e(VA − VB) = e(VB − VA) [eV]
Definizione 59 (elettronvolt [eV]). Unita di misura dell’energia cinetica acquisita da unaparticella, che ha carica pari a quella dell’elettrone, quando e accelerata da una differenzadi potenziale di 1 V:
1 eV = 1, 6 · 10−19 J
Una particella carica e in equilibrio in un punto se lı il campo ha un potenziale elet-trostatico con un minimo forte, cioe valido per piccoli spostamenti in ogni direzione. Inaltre parole, in un campo elettrostatico non esistono posizioni di equilibrio stabile in zonenon occupate dalle sorgenti del campo.
6.2.6 Seconda equazione di Maxwell
Dalla legge di Gauss si era dedotto ∇ · ~E =ρ
ε0oppure informazioni sulle eventuali di-
scontinuita, come [En] =σ
ε0. Il carattere conservativo del campo elettrostatico (cioe∮
~E · d~r = 0) si traduce in una relazione vettoriale locale nei punti in cui il campo e
differenziabile:∇× ~E = 0
Dimostrazione.
∇× ~E = ∇×∇V
= ∇×(∂ V
∂xi+
∂ V
∂yj +
∂ V
∂zk
)∇x ×∇V =
∂2 V
∂y∂z− ∂2 V
∂z∂y= 0
∇y ×∇V = 0∇z ×∇V = 0
per il teorema di Schwartz.
108 6 - Elettrostatica

Fisica generale CC© BY:© $\© =©
Nota 6.2.3. Le linee di forza di campi irrotazionali non possono essere chiuse, altrimenti la circuitazionelungo una di queste linee sarebbe diversa da zero e il campo non sarebbe piu conservativo.
Figura 6.11: Circuitazione del campo elettrostatico lungo un circuito infinitesimo [2]
In corrispondenza delle superfici cariche non e possibile definire il rotore, quindi ilcampo elettrostatico presenta discontinuita: il suo componente ~Et tangente alla superficie,pero, e continuo in ogni punto (figura 6.11). Si considera un circuito infinitesimo: i latiperpendicolari alla superficie sono infinitesimi di ordine superiore rispetto ai d` paralleli(quindi danno contributo trascurabile).
(E1t − E2t) d` = 0
[Et] = (E2t − E1t) = 0
6.2.7 Equazioni di Poisson e di Laplace
∇ · ~E =ρ
ε0~E = −∇V
⇒ −∇ ·∇V = −∇2V =
ρ
ε0
Definizione 60 (Equazione di Poisson). ∇2V =∂2 V
∂x2+∂2 V
∂y2+∂2 V
∂z2= − ρ
ε0.
Nelle regioni di spazio in cui non sono presente cariche l’equazione di Poisson cambiaforma.
Definizione 61 (Equazione di Laplace). ∇2V = 0.
L’equazione di Laplace spiega perche l’operatore ∇2 e chiamato laplacianoEssendo lineari, le due equazioni traducono (formalmente) il principio di sovrapposizio-
ne: il potenziale della somma di due distribuzioni di cariche e la somma dei due rispettivi
potenziali. L’espressione gia vista V (~r) =1
4πε0
∫ρ (~r′) dV ′
|~r − ~r′|e una soluzione dell’equazio-
ne di Poisson (quella che si annulla all’infinito). Nei casi in cui la distribuzione di carichee illimitata non si puo usare, pero si trova il risultato con l’equazione di Poisson.
Si puo risolvere un problema integrando l’equazione di Laplace quando:
1. sono note le posizioni di alcuni conduttori e i potenziali sulle loro superfici (problemadi Dirichlet);
2. sono note le posizioni di alcuni conduttori e il campo nelle loro vicinanze (problemadi Neumann).
6.2.8 Campo elettrostatico del dipolo elettrico
Nota 6.2.4 (Proprieta dell’operatore gradiente). Si considera un punto P = (x, y, z) nello spazio tridi-mensionale xyz di centro O. La distanza r di P da O e:
r =√x2 + y2 + z2
6.2 - Potenziale elettrostatico 109
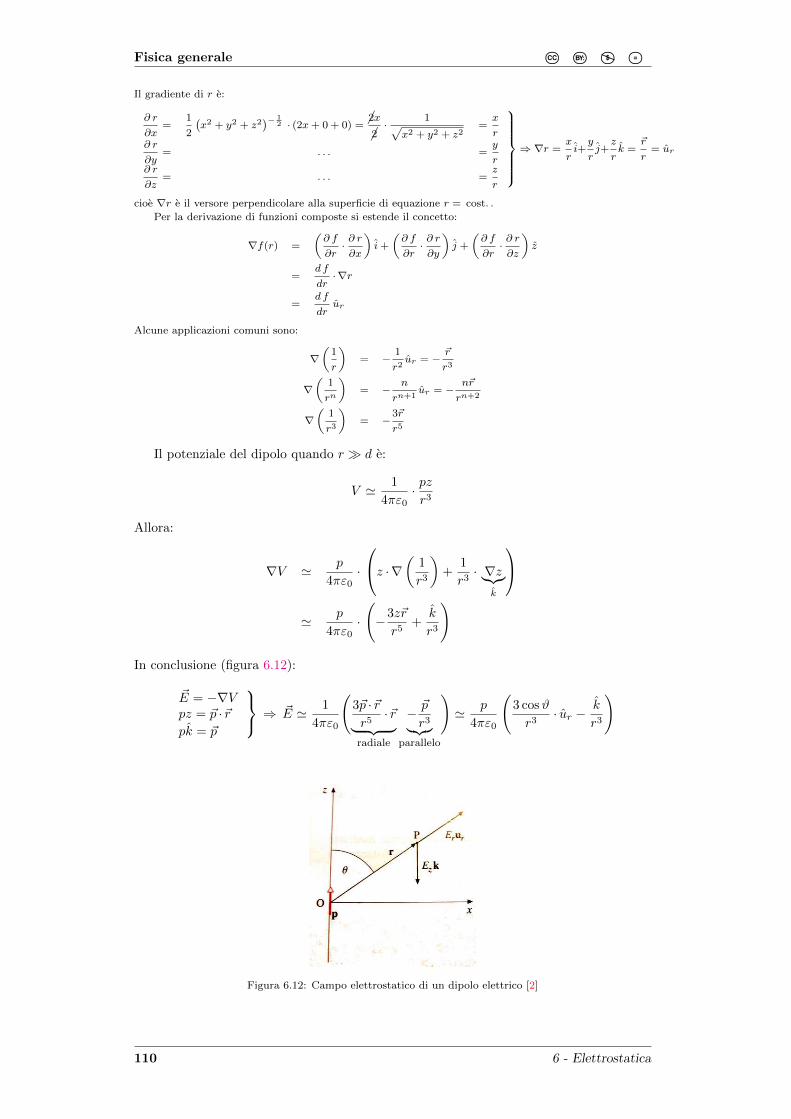
Fisica generale CC© BY:© $\© =©
Il gradiente di r e:
∂ r
∂x=
1
2
(x2 + y2 + z2
)− 12 · (2x+ 0 + 0) = 2x
2·
1√x2 + y2 + z2
=x
r∂ r
∂y= . . . =
y
r∂ r
∂z= . . . =
z
r
⇒ ∇r =
x
ri+y
rj+
z
rk =
~r
r= ur
cioe ∇r e il versore perpendicolare alla superficie di equazione r = cost. .
Per la derivazione di funzioni composte si estende il concetto:
∇f(r) =
(∂ f
∂r·∂ r
∂x
)i+
(∂ f
∂r·∂ r
∂y
)j +
(∂ f
∂r·∂ r
∂z
)z
=d f
dr·∇r
=d f
drur
Alcune applicazioni comuni sono:
∇(
1
r
)= −
1
r2ur = −
~r
r3
∇(
1
rn
)= −
n
rn+1ur = −
n~r
rn+2
∇(
1
r3
)= −
3~r
r5
Il potenziale del dipolo quando r d e:
V ' 1
4πε0·pz
r3
Allora:
∇V ' p
4πε0·
z ·∇(
1
r3
)+
1
r3· ∇z︸︷︷︸
k
' p
4πε0·
(−3z~r
r5+
k
r3
)
In conclusione (figura 6.12):
~E = −∇Vpz = ~p ·~rpk = ~p
⇒ ~E ' 1
4πε0
(3~p ·~rr5
·~r︸ ︷︷ ︸radiale
− ~p
r3︸︷︷︸parallelo
)' p
4πε0
(3 cosϑ
r3· ur −
k
r3
)
Figura 6.12: Campo elettrostatico di un dipolo elettrico [2]
110 6 - Elettrostatica

Fisica generale CC© BY:© $\© =©
Figura 6.13: Sviluppo del potenziale in serie di multipoli [2]
6.2.9 Sviluppo del potenziale in serie di multipoli
Si approssima il valore esatto con una somma di termini via via decrescenti, perche di-
pendenti dalla distanza r secondo termini (potenze) crescenti di1
r. Il centro O e nelle
vicinanza del centro di massa della distribuzione di cariche (figura 6.13). Con V∞ = 0:
V (r) =1
4πε0·(k0
r+k1
r2+k2
r3+ . . .
)dove:
•k0
re il termine di monopolo;
•k1
r2e il termine di dipolo;
•k2
r3e il termine di quadrupolo.
Dimostrazione. Col teorema di Carnot (del coseno):
V =∑i
1
4πε0·
qi|~r − ~ri|
=∑i
1
4πε0·
qi√r2 + r2
i − 2rri cosϑi
=∑i
1
4πε0·
1
r·
qi√1 +
r2i
r2− 2
rir
cosϑi
Per P molto distante dalle cariche (r ri) si sviluppa in serie di Taylor laradice quadrata:
1√1 + x
' 1− x
2+
3
8x2 + . . .(
1 +r2i
r2− 2
rir
cosϑi
)− 12
' 1− r2i
2r2+rir
cosϑi +3
8· 4r2i
r2cos2 ϑi + o
(r2i
r2
)
⇒ V =∑i
1
4πε0·qir
·(
1 +rir
cosϑi +r2i
r2
3 cos2 ϑi − 1
2+ . . .
)Definizione 62 (Momento di dipolo di un sistema di cariche).
~p =∑i
qi~ri
Con la definizione di momento di dipolo si puo scrivere:
1
r
∑qirir cosϑi =
1
r
∑qi~ri ·~r = ~p · ur
⇒ V =1
4πε0·
(∑i qir
+~p · urr2
+1
r3
∑i
qir2i
3 cos2 ϑi − 1
2+ . . .
)
6.2 - Potenziale elettrostatico 111

Fisica generale CC© BY:© $\© =©
Definizione 63 (Termine di monopolo). Nello sviluppo del potenziale in serie, il terminedi monopolo e prevalente a grandi distanze (purche QTOT 6= 0) perche il multipolo eequivalente a una carica unica puntiforme posizionata in O:
k0 =∑i
qi = QTOT
Definizione 64 (Termine di dipolo). Nello sviluppo del potenziale in serie, il termine didipolo e prevalente per sistemi elettricamente neutri (k0 = 0):
k1 = ~p · ur
112 6 - Elettrostatica
CAPITOLO 7
Conduttori e condensatori. Correnti elettriche stazionarie
I materiali possono essere classificati rispetto alla mobilita delle cariche:
conduttori: quando sono caricati, non consentono che la carica resti localizzata in unacerta zona, ma essa e libera di spostarsi in altra parte del corpo;
• una parte delle particelle cariche negativamente sono libere di muoversi pertutto il corpo;
• in condizioni statiche (assenza di moto delle cariche) la forza elettrica e il campoelettrico devono essere nulli in tutto il conduttore (altrimenti gli elettroni, nonvincolati, si metterebbero in movimento);
• il flusso di ~E attraverso una qualsiasi superficie chiusa Σ, interna al conduttore,e nullo. Quindi, la carica interna alla superficie e nulla (legge di Gauss), percui la carica totale e nulla all’interno di un conduttore (la densita di carichepositive e uguale alla densita di cariche negative). La carica si distribuisce sullasuperficie del conduttore.
isolanti: la carica rimane confinata in una certa regione del corpo;
• le cariche elettriche delle molecole sono vincolate a muoversi solo all’internodella molecola;
• un campo elettrico esterno non produce un moto di cariche (eccetto per lapolarizzazione, cioe un moto su piccola scala dovuto a una deformazione dellemolecole o ad un loro orientamento).
7.1 Conduttore cavo
Potrebbero esserci delle cariche sulla superficie della cavita, soggette ad un campo.
1. Si applica la legge di Gauss a una superficie Σ molto vicina alla cavita (figura 7.1(a)).
2. Si ipotizza una distribuzione di carica sulla superficie delle cavita, con distribuzioneglobalmente nulla, e si chiude un percorso γ attraverso il conduttore (figura 7.1(b)).
3. Se davvero fosse ~E 6= 0 nella cavita, la circuitazione non sarebbe nulla e il camponon sarebbe conservativo. Dato che l’ipotesi e assurda, non ci sono cariche nellacavita, per cui il campo e nullo (figura 7.1(c)).
Se all’interno della cavita e presente una carica imposta Q la situazione cambia (figu-ra 7.1(d)):

Fisica generale CC© BY:© $\© =©
(a) Applicazione legge di Gauss (b) Distribuzione di carica su Σ e calcolodella circuitazione lungo γ
(c) Il campo elettrostatico e conserva-tivo, quindi non ci sono cariche nellacavita
(d) Induzione dello schermo in pre-senza di carica interna
Figura 7.1: Conduttore cavo
• Q induce una carica −Q sulla superficie interna;
• −Q induce una carica Q sulla superficie esterna.
Il campo elettrico all’interno del conduttore e sempre ~E = 0.
Proprieta 7.1 (Gabbia di Faraday). Un involucro metallico chiuso scherma sia l’internodall’esterno, sia l’esterno dall’interno.
7.1.1 Schermo elettrostatico
Il campo elettrostatico all’esterno di un conduttore cavo scarico dipende da intensita esegno della carica Q interna alla cavita, ma non dalla distribuzione statica di Q. Il mondoesterno non puo accorgersi della localizzazione particolare di Q nella cavita, anche se e sog-getto ai suoi effetti elettrici, perche il conduttore cavo scherma l’esterno dai cambiamentidi configurazione delle cariche dentro alla cavita.
Per l’unicita della soluzione del problema dell’elettrostatica, esiste solo un modo perdistribuire carica dentro e fuori da un conduttore cavo, in modo che il campo sia nulloall’interno del conduttore.
Figura 7.2: Schermo elettrostatico
114 7 - Conduttori e condensatori. Correnti elettriche stazionarie

Fisica generale CC© BY:© $\© =©
Dentro al conduttore:
~E = ~E1︸︷︷︸Q
+ ~E2︸︷︷︸−Q su Σint
+ ~E3︸︷︷︸+Q su Σest
Dilatando il conduttore (figura 7.2):
• +Q della superficie esterna ha effetti trascurabili sul campo presente tra Σest e Σint;
• deve esistere una distribuzione σint su Σint tale che ~E1 = ~E2 tra Σest e Σint (si
compensano).
Se il conduttore e isolato e privo di cavita:
• su Σest la densita di carica e σest = −ε0∂ V
∂n;
• il campo ~E3 e nullo dentro a Σest.
Per il principio di sovrapposizione, σint e σest risolvono il problema perche sono l’unicasoluzione per la quale corrispondono:
• ~E = 0 nel conduttore (tra Σint e Σest);
• ~E = ~E3 all’esterno del conduttore (fuori da Σest).
7.1.2 Altre proprieta dei conduttori
Sulla superficie esterna dei conduttori, in presenza di carica superficiale, il campo ~E ediretto perpendicolarmente alla superficie (altrimenti il componente tangente metterebbein moto le cariche). Considerando una superficie con densita superficiale di carica σ:
~E = 0 dentro al conduttore
[En] =σ
ε0discontinuita comp. normale
[Et] = 0 continuita comp. tangente
⇒ E =|σ|ε0
all’esterno (imm. vicinanze)
Teorema 17 (di Coulomb). ~E = −∂ V∂n
n =σ
ε0n.
Corollario 18. Il campo e diretto:
• verso l’esterno, se la densita di carica σ e positiva;
• verso l’interno, se la densita di carica σ e negativa.
Ad esempio, nelle vicinanze di una sfera:
σ =q
4πR2⇒ ~E =
1
4πε0·q
R2n
Pressione elettrostatica. Quando in uno strato superficiale esiste un eccesso di carichepositive, una forza tende ad espellerle:
dq = σ dS
~Elont =σ
2ε0n
d ~F = dq · ~Elont =σ2
2ε0︸︷︷︸p
dS n sempre verso l’esterno
Definizione 65 (Pressione elettrostatica). p =σ2
2ε0.
Proprieta 7.2 (Potenziale di un conduttore). Poiche ~E = 0 lungo tutto il conduttore,tutti i punti dello stesso conduttore sono al medesimo potenziale.
7.1 - Conduttore cavo 115

Fisica generale CC© BY:© $\© =©
Figura 7.3: Ripartizione della carica elettrica tra conduttori [2]
Ripartizione della carica. Unendo due sfere cariche (figura 7.3), si eguagliano i po-tenziali perche la carica si distribuisce uniformemente:
1
4πε0·q1
R1=1
4πε0·q2
R2
q1 = q2 ·R1
R2−→
q1 = q ·
R1
R1 +R2
q2 = q ·R2
R1 +R2
Le cariche sulle sfere sono proporzionali ai propri raggi. Si puo anche scrivere:
q1
R1=
q2
R2⇒ σ1R1 = σ2R2
interpretabile come “il campo elettrico ha maggiore intensita in corrispondenza del raggiodi curvatura piu piccolo”, cioe nelle zone piu appuntite (“effetto punte”).
7.2 Potenziale e capacita
Esiste proporzionalita tra la carica Q e il potenziale V , perche esiste una soluzione unicaper la funzione V (~r) per la quale corrisponde un preciso valore di Q.
Definizione 66 (Capacita). C =Q
V
[F =
C
V
]. La capacita dipende solo dalla geometria
del conduttore.
Capacita e potenziale di una sfera di raggio R.
• La carica e distribuita sulla superficie.
• Si calcola il potenziale nel centro della sfera, equidistante da tutti gli altri punti dellasuperficie:
V =
∫1
4πε0·dq
r=
1
4πε0·Q
R⇒ C = 4πε0 ·R
7.2.1 Valutazione energetica della carica di un conduttore
Si carica un conduttore di forma sferica, cioe si trasferisce ripetutamente una piccola caricadq finche non e stata trasferita tutta Q. Mano a mano che si aggiune carica, bisognaesercitare una forza per contrastare la repulsione provocata dalle cariche prima trasferite.Supponendo le cariche ferme prima e dopo il trasferimento, la forza compie un lavoroL = V ·Q in ogni istante.
Consideriamo la carica parziale del conduttore: 0 < q < Q.Quando il conduttore ha la carica q, il suo potenziale e:
V (q) =1
4πε0·q
R
116 7 - Conduttori e condensatori. Correnti elettriche stazionarie

Fisica generale CC© BY:© $\© =©
Il lavoro necessario per trasferire la carica dq e:
δL = V (q) · dq
L =
∫δL =
∫ Q
0
V dq =
∫ Q
0
1
4πε0·q
Rdq =
1
8πε0·Q2
R
che corrisponde alla variazione dell’energia potenziale del sistema.
7.2.2 Sistema di piu conduttori
Per due conduttori nel vuoto si possono scrivere le relazioni:Q1 = α11V1 + α12V2
Q2 = α21V1 + α22V2
I coefficienti αij dipendono solo da:
• forma geometrica delle superfici dei conduttori;
• posizione relativa dei conduttori.
Si puo anche scrivere una coppia di relazioni analoga:V1 = β11Q1 + β12Q2
V2 = β21Q1 + β22Q2
Si puo dimostrare che la matrice[aij
]e simmetrica.
7.3 Condensatore
Definizione 67 (Induzione completa). Situazione fisica in cui due conduttori hanno caricauguale, ma segno contrario:
Q1 = QQ2 = −Q
⇒
V1 = β11Q− β12QV2 = β21Q− β22Q
∆V = V1 − V2 = Q · (β11 − β12 − β21 + β22)︸ ︷︷ ︸1
C
Definizione 68 (Capacita elettrica). C =
∣∣∣∣ Q∆V∣∣∣∣. Nel vuoto, dipende solo dalla forma
geometrica e dalla posizione reciproca dei conduttori che si inducono completamente.
Definizione 69 (Condensatore). Sistema di due conduttori (armature) aventi caricheuguali, ma di segno contrario.
Condensatore sferico. Si carica la superficie sferica S1 con q (figura 7.4): viene indotta−q su S2. Su S3 c’e +q per equilibrare il conduttore esterno (che e neutro). I potenzialisi calcolano rispetto al centro O:
V1 =1
4πε0·(q
r1− q
r2+
q
r3
)V2 =
1
4πε0·q
r3
⇒ V1 − V2 =1
4πε0·(q
r1− q
r2
)C =
q
∆V=
4πε01r1− 1
r2
= 4πε0 ·r1r2
r2 − r1
7.3 - Condensatore 117

Fisica generale CC© BY:© $\© =©
Figura 7.4: Condensatore sferico [2]
Quando r1 → r2, ponendo r2 = r1r2 e d = r2 − r1 si riscrive:
C ' 4πε0 ·r2
d' ε0S
d
che ha validita generale.
Proprieta 7.3 (Capacita di un condensatore). C =ε0S
d.
Condensatore piano. E un doppio strato (sezione 6.2.4), per cui:
∆V =σd
ε0⇒ C =
q
∆V=
σS
σd
ε0
=ε0S
d
Condensatore cilindrico. E composto da tre superfici coassiali: S1 (raggio r1), S2
(raggio r2), S3 (raggio r3). La lunghezza longitudinale e molto maggiore dello spessore deldielettrico (h d = r2 − r1).
Per r1 < r < r2 il campo elettrico e radiale, di modulo E =1
2πε0·q
h· 1r .
∆V = V (r1)− V (r2) =
∫ r2
r1
~E · d~r su un segmento radiale
(quindi ~E e d~r sono paralleli ed equiversi)
=
∫ r2
r1
E dr
=1
2πε0·q
h
∫ r2
r1
dr
r
=1
2πε0·q
h· ln
r2
r1
C = ε02πh
lnr2
r1
Se r1 ' r2, si approssima:
lnr2
r1= ln
r1 + d
r1= ln
(1 +
d
r1
)' d
r1quando
d
r1 1
⇒ C ' ε02πhr1
d= ε0 ·
S
d
118 7 - Conduttori e condensatori. Correnti elettriche stazionarie

Fisica generale CC© BY:© $\© =©
Collegamento in parallelo di condensatori. Sui condensatori e uguale la differenzadi potenziale ∆V :
Q1 = C1 · ∆VQ2 = C2 · ∆V
⇒ Q = Q1 +Q2 = (C1 + C2)︸ ︷︷ ︸
C
· ∆V
Con n condensatori in parallelo:
CTOT =
n∑i=1
Ci
Collegamento in serie di condensatori. Sui condensatori e uguale la carica Q:
∆V1 =Q
C1
∆V2 =Q
C2
⇒ ∆V = ∆V1 + ∆V2 = Q ·(
1
C1+
1
C1
)︸ ︷︷ ︸
1
C
Con n condensatori in serie:1
CTOT=
n∑i=1
1
Ci
7.3.1 Energia elettrostatica
Definizione 70 (Energia potenziale di un sistema di cariche). Lavoro fatto per costruireil potenziale, sostando ogni carica con una forza esterna uguale e contraria a quella dovutaal campo elettrostatico prodotto dalle altre cariche:
Lest∞B = q ·(V (~rB)− V (∞)
)1. Si porta la prima carica q1 in posizione definitiva.
Lest1 = 0 perche il campo e nullo in assenza di altre cariche a distanza finita.
2. Si porta la seconda carica q2 dall’infinito alla posizione definitiva P2:
Lest2 = q2 ·V (P2) = q2 ·1
4πε0·
q
|~r1 − ~r2|︸ ︷︷ ︸potenziale in P2 dovuto a q1
3. Si porta la terza carica q3 dall’infinito alla posizione definitiva P3:
Lest3 = q3 ·(V (P2) + V (P3)
)= q3 ·
(1
4πε0·
q1
|~r1 − ~r3|+
1
4πε0·
q2
|~r2 − ~r3|
)4. Iterando il procedimento:
Lest = UE =1
2
n∑i=1j=2i6=j
1
4πε0·
qiqj|~ri − ~rj |
=1
2
n∑i=1
qi ·n∑j=1j 6=i
1
4πε0·
qj|~ri − ~rj |︸ ︷︷ ︸
potenziale in Pi caratterizzata da ~ri
=1
2
n∑i=1
qi ·V (~ri)
7.3 - Condensatore 119

Fisica generale CC© BY:© $\© =©
Nota 7.3.1. Perche delle cariche possano essere considerate “reciprocamente puntiformi” serve chela loro distanza relativa sia molto piu grande delle dimensioni dello spazio in cui sono localizzate.
Definizione 71 (Energia elettrostatica). UE = Lest =1
2
n∑i=1
qi ·V (~ri).
• Se la distribuzione di carica e un continuo, basta sostituire q con dq (entro volumidV ) e le sommatorie con integrali:
UE =1
2
∫ρ(~r) dV ·
∫1
4πε0·ρ(~r dV ′
|~r − ~r′|︸ ︷︷ ︸V (~r)
• Se le cariche sono distribuite anche sulle superfici, si possono separare i contributi:
UE =1
2
∫ρ(~r) ·V (~r) dV +
1
2
∫σ(~r)V (~r) dS
• Se il sistema e un insieme di conduttori, si sommano solo integrali di superficie:
UE =1
2
n∑i=1
∫σ(~r)V (~r) dS
=1
2
n∑i=1
Vi
∫σ(~r) dS (le superfici sono equipotenziali)
=1
2
n∑i=1
ViQi
Usando la legge di Gauss (∇ · ~E =ρ
ε0):
UE =1
2
∫ρ(~r) ·V (~r) dV
=ε0
2
∫V (~r)
(∇ · ~E(~r)
)︸ ︷︷ ︸
∇ ·(V (~r)~E
)=V (~r)(∇ · ~E)+∇V (~r) · ~E
dV
=ε0
2
∫∇ ·
[V (~r) · ~E(~r)
]dV︸ ︷︷ ︸
t. della divergenza
−ε0
2
∫~E(~r) · ∇V (~r)︸ ︷︷ ︸
−~E(~r)
dV
=ε0
2
∫V (~r) · ~E(~r) · n dS +
∫ε0E
2
2dV
Se la carica e limitata, si puo integrare su un volume infinito (dove non c’e carica ilcontributo e nullo). Allora l’integrale di superficie tende a zero e resta:
UE =
∫ε0E
2
2dV (integrale esteso a tutto lo spazio)
Definizione 72 (Densita di energia per il campo elettrostatico). uE =dU
dV=
1
2ε0E
2.
Energia elettrostatica di un condensatore
Qual e il lavoro necessario a portare sulle armature del condensatore due cariche uguali econtrarie Q e −Q?
120 7 - Conduttori e condensatori. Correnti elettriche stazionarie

Fisica generale CC© BY:© $\© =©
Ogni trasferimento di carica dq richiede un lavoro δL = dq · ∆V . Durante i vari passaggi
la differenza di potenziale cambia: da ∆Viniz = 0 a ∆Vfin =Q
C. Nelle fasi intermedie:
∆V =q
Ccon q < Q (carica istantanea, trasferita fino a quel momento)
δL =q
C· dq
Il lavoro complessivo e: L =
∫ Q
0
q
Cdq =
Q2
2C= UE , che e l’energia potenziale elettrostatica
immagazzinata nel sistema con la carica. Valgono anche le relazioni inverse:
L = UE =C(∆V )2
2=Q · ∆V
2
Questa energia puo essere trasformata in altre forme di energia, quindi e una vera energiapotenziale. L’energia e attribuita al campo localizzato tra le armature.
Considerando un condensatore piano (che ha il campo elettrostatico uniforme):
C =ε0S
d∆V = E · d
UE =
1
2
ε0S
dE2d2 =
1
2ε0E
2Sd
dove S · d e il volume nel quale il campo e diverso da 0.
Definizione 73 (Densita di energia per il campo elettrostatico in un condensatore piano).
uE =dU
dV=
UES · d
=1
2ε0E
2
Figura 7.5: Forze agenti sull’armatura mobile di un condensatore piano [2]
Forza tra le armature di un condensatore
In un condensatore (figura 7.5), le armature si attraggono perche hanno cariche di se-gno opposto. Le cariche non sono puntiformi, quindi si usa il principio di conservazionedell’energia.
C =ε0S
x, UE =
Q2
2C=
Q2x
2ε0S
Si applica ~F est per compensare la forza attrattiva ~F e rendere nullo il lavoro delle forzeapplicate (non c’e variazione di energia cinetica). Si puo uguagliare la variazione di energiatotale al lavoro delle forze esterne:
dUE = δLest = F est dx =Q2x
2ε0S⇒ F =
Q2
2ε0S
Definizione 74 (Pressione elettrostatica). p =F
S=
σ2
2ε0.
Proprieta 7.4 (Pressione elettrostatica in un condensatore). Tra le armature E =|σ|ε0
,
quindi vale in generale:
p =F
S=
1
2|σ| ·E
7.3 - Condensatore 121

Fisica generale CC© BY:© $\© =©
7.3.2 Condensatore con dielettrico
Per aumentare la capacita C = ε0S
dbisogna ridurre la distanza tra le armature: per
evitare il contatto si inserisce un materiale dielettrico. Questa operazione:
1. aumenta la capacita;
2. diminuisce la differenza di potenziale ∆V .
Il materiale ha costante dielettrica relativa εr > 1:
C = εrC0 =ε0εrS
d, ∆V =
∆V0
εr
7.3.3 Elettrostatica nei dielettrici
Le cariche non sono libere di muoversi, ma legate all’interno delle strutture atomichee molecolari. La presenza del campo elettrico si manifesta con la polarizzazione deldielettrico,cioe la redistribuzione delle cariche.
Polarizzazione per deformazione (in tutti i dielettrici). Le cariche positive si
spostano di poco nel senso di ~E; le cariche negative si spostano di poco nel senso opposto.Gli spostamenti inducono un momento di dipolo, che ha la stessa direzione di ~E e gli eproporzionale in modulo:
~p = α~E
α (polarizzabilita elettronica) dipende dalla struttura dell’atomo.
(a) Azione del campo ~E che provocal’orientamento del dipolo [2]
(b) Superficie gaussiana usa-ta per determinare il campo~E nel dielettrico posto tra learmature in un condensatore
Figura 7.6: Elettrostatica nei dielettrici
Polarizzazione per orientamento (solo per dielettrici con molecole con momentidi dipolo intrinseci). Un dipolo immersi in un campo elettrico tende ad allineare il
momento di dipolo con ~E (figura 7.6(a)):
• su ogni carica agisce la forza |q ~E|;
• il modulo del momento meccanico e:
M = qEd senϑ = pE senϑ cioe ~M = ~p× ~E
122 7 - Conduttori e condensatori. Correnti elettriche stazionarie

Fisica generale CC© BY:© $\© =©
Si pone uguale a 0 il potenziale al centro del dipolo:
V = −d2E cosϑ in q
V =d
2E cosϑ in − q
UE = −d2Eq cosϑ− d
2Eq cosϑ
= −qdE cosϑ
= −~p · ~E
cioe i dipoli tendono ad orientarsi con ~p parallelo a ~E.
Definizione 75 (Densita (intensita) di polarizzazione). Campo vettoriale ~P che descrivemacroscopicamente la polarizzazione di un dielettrico:
~P =~p
V(momento di dipolo elettrico per unita di volume)
Per i materiali normali (lineari, omogenei e isotropi) si puo scrivere una relazione di
proporzionalita diretta tra ~P e ~E.
• σ: densita di carica superficiale sul conduttore (cariche libere);
• σ′: densita di carica superficiale di polarizzazione.
Si applica la legge di Gauss a una superficie gaussiana tra il dielettrico normale e l’armatura(figura 7.6(b)):
E =|σ| − |σ′|
ε0
(estensione di E =|σ|ε0, valida quando il dielettrico e il vuoto)
=|σ|ε0εr
⇒ |σ′| =
(1− 1
εr
)· |σ|
Definizione 76 (Suscettivita del dielettrico). χ = εr − 1.
A fronte della definizione di suscettivita si possono riscrivere:
|σ′| = χ
εr· |σ| e |q′| = χ
εr· |q|
Il volume del dielettrico e A · d, quindi:
P =|σ′| ·A · dA · d
= |σ′| e p = |σ′| ·A · d
=χ
εr· |σ|
= χε0E~P = χε0
~E
Si puo scrivere:
E =|σ| − |σ′|
ε0=|σ| − Pε0
⇒ |σ| = ε0E + P
dal quale si introduce un campo ausiliario ~D.
7.3 - Condensatore 123

Fisica generale CC© BY:© $\© =©
Definizione 77 (Induzione elettrica (di spostamento elettrico)). Campo ~D collegato soloalle cariche libere (non quelle di polarizzazione), anche nei dielettrici non normali:
~D = ε0~E + ~P
Nei soli dielettrici normali vale il modulo D = |σ| = ε0εrE.
In generale, la relazione tra ~P e ~E va valutata sperimentalmente perche dipende dallaposizione ~r nel dielettrico, da | ~E| e dalla temperatura. Nei materiali isotropi, ~P // ~Esempre:
~P = χ(~r,E) · ε0~E
7.4 Correnti elettriche stazionarie
Definizione 78 (Fenomeno stazionario). Le caratteristiche sono invarianti nel tempo inciascun punto. Questo vale anche se le cariche elettriche sono in movimento.
Il trasporto di cariche puo avvenire nei mezzi dove una parte e libera di muoversi. Neimezzi diversi dal vuoto, in assenza di campo le cariche si muovono con velocita dipendentedalla temperatura, ma direzione, verso e intensita variano casualmente: quindi 〈~v〉 = 0 (ilvalor medio delle velocita e nullo).
L’ordine di grandezza della velocita, in un conduttore metallico, e v = 106 m/s. Ilcampo elettrico determina un movimento collettivo di cariche in una precisa direzione. Lecariche si muovono con velocita ~vd (velocita di deriva).
〈~v〉 = ~vd (tipicamente vd = 1 mm/s)
Definizione 79 (Intensita di corrente). Quantita di carica che attraversa una superficieorientata S nell’unita di tempo:
i =dQ
dt
[A =
C
s
]Il verso positivo della corrente e quello dei portatori di carica positiva.
Nell’unita di volume sono presenti N portatori di carica, quindi:
dQ = N · q dV
= N · q︸︷︷︸ρp
[(~vd · n
)dt]dS
ρp e la densita di carica dei portatori, mentre ~vd · n e la componente normale della velocita.
Definizione 80 (Densita di corrente elettrica). ~J = N · q ·~vd = ρp ·~vd = ~J+ + ~J−. Il
modulo∣∣∣ ~J∣∣∣ misura il rapporto tra intensita di corrente e area della sezione normale del
conduttore.
Allora si puo scrivere:
dQ
dt=
∫S
N · q ·~vd · n dS =
∫S
~J · d~S︸︷︷︸n · dS
cioe l’intensita di corrente attraverso una superficie orientata ~S e il flusso della densita ~Jattraverso quella superficie.
124 7 - Conduttori e condensatori. Correnti elettriche stazionarie

Fisica generale CC© BY:© $\© =©
7.4.1 Conservazione della carica elettrica
Q(t+ ∆t) = Q(t)−∆t ·∮S
~J · d~S −→∮S
~J · d~S +∆Q
∆t= 0
Con ∆t→ 0:∮S
~J · d~S +dQ
dt= 0 principio di conservazione della carica elettrica
In forma differenziale: ∫V
∇ · ~J dV +d
dt
∫V
ρ dV = 0
Il volume di integrazione e costante, quindi derivazione e integrazione possono essere svoltiin ordine inverso: ∫
V
(∇ · ~J +
∂ ρ
∂t
)dV = 0
Poiche l’integrale e valido per ogni volume, l’integrando deve essere nullo:
∇ · ~J +∂ ρ
∂t= 0 eq. di continuita della corrente elettrica
Proprieta 7.5 (Equazione di continuita della corrente elettrica stazionaria). Per correntistazionarie ρ non dipende dal tempo:
∇ · ~J = 0
~J e solenoidale e le sue linee di campo sono chiuse.
Proprieta 7.6 (Equazione di continuita della corrente elettrica non stazionaria). Per
correnti non stazionarie si puo usare localmente la legge di Gauss ∇ · ~E =ρ
ε0:
∇ ·
(~J + ε0
∂ ~E
∂t
)= 0
~J + ε0∂ ~E
∂te solenoidale e le sue linee di campo sono chiuse.
Proprieta 7.7 (Densita di corrente di spostamento). ε0∂ ~E
∂t.
7.4.2 Legge di Ohm
Proprieta 7.8 (Prima legge di Ohm). ∆V = R · i.
Proprieta 7.9 (Seconda legge di Ohm). R = ρR ·l
S.
Definizione 81 (Resistivita). Dato un coefficiente di temperatura α:
ρR(T ) = ρR(T0) · (1 + α · ∆T )
In un conduttore di forma qualsiasi (non solo filiforme):
dV = R · di = ρRdl
dS· di
dV = E · dldi = J · dS
E = ρR · J e ~E = ρR · ~J (equiversi)
oppure ~J =1
ρR~E = σC ~E, dove σC e la conduttivita (o conducibilita).
Per un qualsiasi conduttore si puo trovare la relazione costitutiva ~J = f( ~E). Ci si
chiede, pero, perche ~J e ~E hanno una relazione lineare tra loro. Si osserva il comportamentodei portatori di carica (elettroni) nei conduttori metallici:
m = me
q = −e
7.4 - Correnti elettriche stazionarie 125

Fisica generale CC© BY:© $\© =©
Modello classico della conduzione nei conduttori ohmici (di Drude-Lorentz).Gli elettroni di conduzione si comportano come particelle di un gas racchiuso in uncontenitore.
• In assenza di campo elettrico, con ~v1 velocita dei portatori: 〈~v1〉 = 0.
• In presenza di campo, dopo un tempo t: ~v2 = ~v1 +q ~E
mt.
• Tra una collisione e l’altra contro il reticolo cristallino: 〈~v2〉 = 〈~v1〉+q ~E
m〈t〉 =
q ~E
mτ .
Definizione 82 (Velocita di deriva). Spostamento macroscopico dei portatori di caricanella direzione del campo:
~vd = 〈~v2〉
Con la definizione di velocita di deriva si puo scrivere:
~J = Nq~vd =Nq2τ
m︸ ︷︷ ︸σc
~E quindi ~J // ~E
7.4.3 Generatori di forza elettromotrice
Servono forze in grado di compiere un lavoro non nullo sui portatori di carica, per ogniloro attraversamento del circuito lungo le linee di flusso chiuse dalla corrente. Le forzenon possono essere dovute solo ad un campo elettrostatico, perche ha circuitazione nullalungo ogni linea chiusa (e conservativo):∮
~Es · d~r = 0
Tra l’altro, se in ogni punto fosse ~E = ~ES , lungo una linea di flusso di ~J si avrebbe:∮~J · d~r = σc ·
∮~E · d~r = σc ·
∮~ES · d~r = 0 (assurdo)
Serve un generatore per avere una corrente stazionaria nel circuito. In esso si generanoforze (non conservative) che mantengono una ∆V tra i suoi poli anche quando questa ∆Ve utilizzata per spostare cariche lungo il circuito esterno. In tutti i generatori elettriciesistono all’interno forze non elettrostatiche che separano le cariche e conservano tra ipoli una ∆V . Il campo dovuto alle forze non elettrostatiche, presente solo all’interno delgeneratore, e il campo elettromotore ~Em e ha proprieta completamente diverse dal campoelettrostatico ~Es (tabella 7.1).
Campo elettromotore Campo elettrostatico
( ~Em) ( ~Es)non conservativo conservativo
6= 0 6= 0solo dentro al generatore ovunque
Tabella 7.1: Differenze tra campo elettromotore ed elettrostatico
Il campo totale e ~E = ~Em + ~Es. In certe condizioni, ~Em = 0, ad esempio fuori dalgeneratore.
Su due percorsi, uno interno e uno esterno al generatore (figura 7.7(a)), essendo ~Esconservativo vale: ∫ B
Aint
~Es · d~r =
∫ B
Aest
~Es · d~r ⇒∮
~Es · d~r = 0
126 7 - Conduttori e condensatori. Correnti elettriche stazionarie

Fisica generale CC© BY:© $\© =©
(a) Campi elettromotore ~Em
ed elettrostatico ~Es nel caso diun generatore elettrico. Lungoil circuito esterno, ~Es ha i versiindicati in figura
(b) Caratteristica tensione-corrente di ungeneratore reale di tensione
Figura 7.7: Elettrostatica nei dielettrici
Tuttavia, il passaggio di una corrente richiede che sia
∮~E · d~r 6= 0. Su un percorso che
passa per il generatore si puo scrivere:∮~E · d~r =
∮ (~Em + ~Es
)· d~r =
∫ A
Bint
~Em · d~r = ε
dato che il campo elettromotore e non nullo solo dentro al generatore.
Definizione 83 (Forza elettromotrice). Circuitazione di ~E relativa al percorso chiuso diintegrazione:
f.e.m. = ε =
∮~E · d~r
Definizione 84 (Forza elettromotrice del generatore). ε =
∫ A
Bint
~Em · d~r.
Quando A e B non sono connessi esternamento, il generatore non eroga corrente e ilcampo totale al suo interno e nullo:
~E = ~Em + ~Es = 0
• Durante la carica, ~Em accumula cariche di segno opposto sui due poli.
• Le cariche generano ~Es, che ostacola il trasferimento di altre cariche sui poli.
• Quando ~Em e ~Es si equilibrano, il trasferimento di carica si ferma.
Lungo un percorso interno:∫ A
Bint
~E · d~r =
∫ A
Bint
(~Em + ~Es
)· d~r = 0
⇒ ε =
∫ A
Bint
~Em · d~r = −∫ A
Bint
~Es · d~r = VA(0) − VB(0)
La forza elettromotrice di un generatore e la differenza di potenziale ai suoi capi quandonon eroga corrente.
Proprieta 7.10 (Caratteristica tensione-corrente di un generatore reale di tensione). Datauna resistenza interna r e una resistenza esterna R, un generatore reale di tensione ecaratterizzato da (figura 7.7(b)):
ε = ir + iR
In generale, VA − VB ≤ ε: sono uguali solo quando il generatore non eroga corrente.
7.4 - Correnti elettriche stazionarie 127

Fisica generale CC© BY:© $\© =©
7.4.4 Leggi di Kirchhoff
Definizione 85 (Maglia). Insieme di rami che formano un circuito chiuso.
Definizione 86 (Nodo). Punto di confluenza di due o piu rami di un circuito.
Proprieta 7.11 (Legge di Kirchhoff delle maglie). In una maglia, avendo scelto un versodella corrente nella maglia e un verso di percorrenza, la somma algebrica delle cadute ditensione e delle forze elettromotrici e nulla.
Proprieta 7.12 (Legge di Kirchhoff dei nodi). In ogni nodo, la somma delle correntientranti e uguale alla somma delle correnti uscenti.
Nota 7.4.1. La legge di Kirchhoff delle maglie esprime la proprieta del campo elettrico di essere conser-vativo.
Ponte di Wheatstone
Figura 7.8: Ponte di Wheatstone
Applicando le leggi di Kirchhoff al circuito di figura 7.8 e possibile trovare il seguentesistema simmetrico: ε +(R1 +R2)i1 −(R1 +R2 + rε)i2 −R1iG = 0
(R1 +R2 +R3 +R4)i1 −(R1 +R2)i2 −(R1 +R4)iG = 0−(R1 +R4)i1 +R1i2 +(R1 +R4 + rG)iG = 0 −(R1 +R2)i1 +(R1 +R2 + rε)i2 +R1iG = ε
(R1 +R2 +R3 +R4)i1 −(R1 +R2)i2 −(R1 +R4)iG = 0−(R1 +R4)i1 +R1i2 +(R1 +R4 + rG)iG = 0
Indicando con D il determinante dei coefficienti delle correnti si ha:
iG =ε(R1R3 −R2R4)
D
Occorre iG = 0 per il corretto funzionamento del ponte:
iG = 0 ⇐⇒ R1R3 = R2R4
La relazione tra le resistenze e indipendente da ε e da D. Avendo una resistenza incognita,la si ricava a partire dalle altre.
128 7 - Conduttori e condensatori. Correnti elettriche stazionarie

Fisica generale CC© BY:© $\© =©
Fenomeni non stazionari: circuito RC
In condizioni non stazionarie il campo elettrico non e conservativo, quindi non si puoapplicare la legge di Kirchhoff delle maglie. Processi di carica e scarica lenti, tuttavia,sono assimilabili a situazioni quasi-stazionarie, per le quali le variazioni nel tempo dellecorrenti si manifestano quasi subito in ogni punto del circuito. In tal modo vale la leggedelle maglie.
Figura 7.9: Circuito di carica-scarica di un condensatore
Processo di carica di un condensatore. Si considera il circuito di figura 7.9. Acontatto chiuso sul generatore:
ε−R · i︸︷︷︸d q
dt
−∆V︸︷︷︸q
C
= 0
ε−R · d qdt− q
C= 0 (eq. differenziale a var. separabili)
dq
Cε− q=
dt
RC∫ q
0
dq
Cε− q=
∫ t
0
dt
RC
lnCε− qCε
= − t
RC
Cε− q = Cεe−tRC
q(t) = Cε(
1− e− tRC
) q(0) = 0q(∞) = Cε
i(t) =d q
dt=
ε
Re−
tRC
i(0) =
ε
Ri(∞) = 0
Definizione 87 (Costante di tempo). τ = RC e la costante di tempo del circuito, chedetermina la rapidita con cui la funzione di carica tende al valore asintotico.
Processo di scarica di un condensatore. Sempre considerando il circuito di figu-ra 7.9, a contatto chiuso sul cortocircuito:
ε = 0
ε−R · i︸︷︷︸d q
dt
−∆V︸︷︷︸q
C
= 0
−R · d qdt− q
C= 0 (eq. differenziale a var. separabili)
dq
q= − dt
RC∫ q
0
dq
q= −
∫ t
0
dt
RC
q(t) = Cεe−tRC
i(t) =d q
dt= − ε
Re−
tRC
7.4 - Correnti elettriche stazionarie 129

Fisica generale CC© BY:© $\© =©
Il verso della corrente di scarica e opposto al verso della corrente di carica.
Bilancio energetico del processo di carica. Il generatore esegue un lavoro:
δL = ε · dq = ε · i dt
=ε2
Re−
tRC dt
L =
∫ ∞0
ε2
Re−
tRC dt
= Cε2
∫ ∞0
e−tRC d
t
RC
= Cε2
L’energia accumulata nel condensatore e UE = Cε2
2 ; altrettanta e stata dissipata nellaresistenza per effetto Joule.
130 7 - Conduttori e condensatori. Correnti elettriche stazionarie
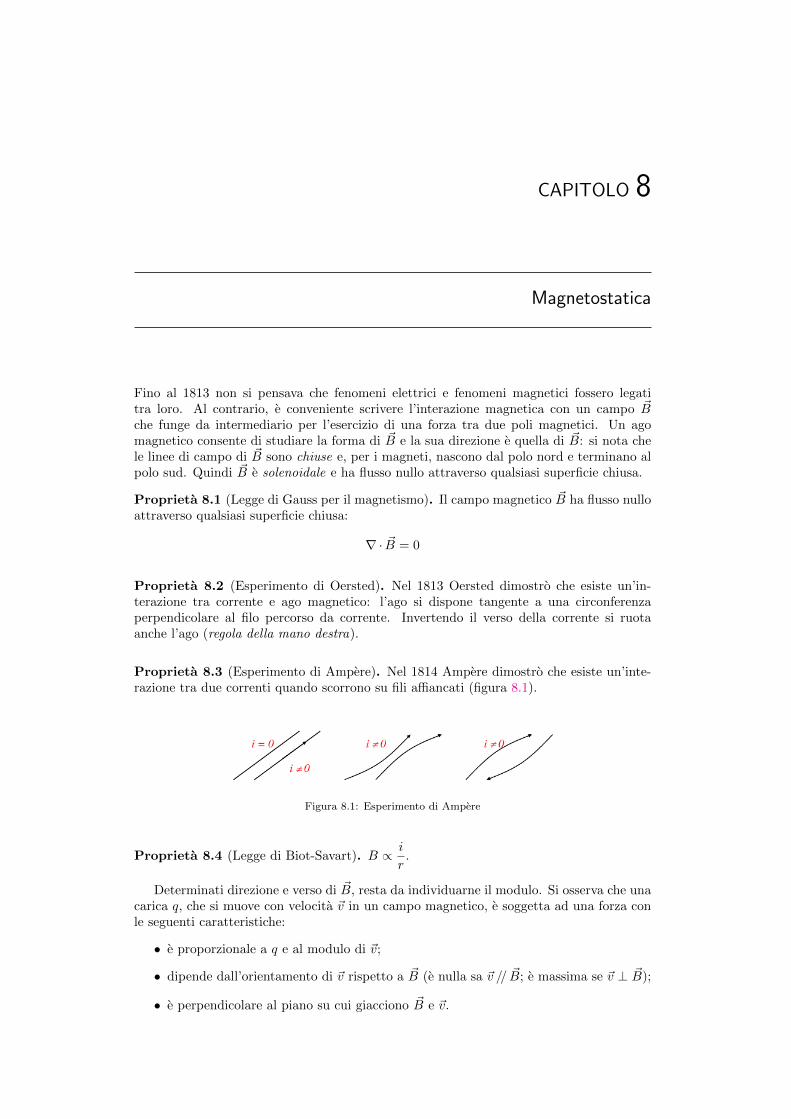
CAPITOLO 8
Magnetostatica
Fino al 1813 non si pensava che fenomeni elettrici e fenomeni magnetici fossero legatitra loro. Al contrario, e conveniente scrivere l’interazione magnetica con un campo ~Bche funge da intermediario per l’esercizio di una forza tra due poli magnetici. Un agomagnetico consente di studiare la forma di ~B e la sua direzione e quella di ~B: si nota chele linee di campo di ~B sono chiuse e, per i magneti, nascono dal polo nord e terminano alpolo sud. Quindi ~B e solenoidale e ha flusso nullo attraverso qualsiasi superficie chiusa.
Proprieta 8.1 (Legge di Gauss per il magnetismo). Il campo magnetico ~B ha flusso nulloattraverso qualsiasi superficie chiusa:
∇ · ~B = 0
Proprieta 8.2 (Esperimento di Oersted). Nel 1813 Oersted dimostro che esiste un’in-terazione tra corrente e ago magnetico: l’ago si dispone tangente a una circonferenzaperpendicolare al filo percorso da corrente. Invertendo il verso della corrente si ruotaanche l’ago (regola della mano destra).
Proprieta 8.3 (Esperimento di Ampere). Nel 1814 Ampere dimostro che esiste un’inte-razione tra due correnti quando scorrono su fili affiancati (figura 8.1).
Figura 8.1: Esperimento di Ampere
Proprieta 8.4 (Legge di Biot-Savart). B ∝ i
r.
Determinati direzione e verso di ~B, resta da individuarne il modulo. Si osserva che unacarica q, che si muove con velocita ~v in un campo magnetico, e soggetta ad una forza conle seguenti caratteristiche:
• e proporzionale a q e al modulo di ~v;
• dipende dall’orientamento di ~v rispetto a ~B (e nulla sa ~v // ~B; e massima se ~v ⊥ ~B);
• e perpendicolare al piano su cui giacciono ~B e ~v.

Fisica generale CC© BY:© $\© =©
Si puo scrivere:
B =FMAX
|q| · v
[N
A · m= T(tesla) = 104G (gauss)
]Definizione 88 (Forza di Lorentz). ~F = q~v × ~B.
Il lavoro compiuto dalla forza di Lorentz e sempre nullo, perche la forza e sempreortogonale allo spostamento elementare.
8.1 Correnti e campi magnetici
Due sono gli aspetti di interesse:
1. il campo prodotto dalla corrente che circola in un conduttore;
2. la forza che il campo produce agendo su un secondo conduttore nel quale circolacorrente.
Proprieta 8.5 (Legge di Biot-Savart per un filo rettilineo). B = µ0i
2πr.
Definizione 89 (Permeabilita magnetica del vuoto). µ0 = 4π · 10−7
[N
A
].
Si puo assumere che ogni elemento di linea d` contribuisca al campo magnetico con uncampo elementare1.
Proprieta 8.6 (Prima legge elementare di Laplace). d ~B =µ0
4π· i ·
d`× ~rr3
.
Proprieta 8.7 (Legge di Ampere-Laplace). ~B =
∮d ~B =
µ0
4π· i ·∮d`× ~rr3
.
Si integra lungo il circuito percorso da corrente.
Proprieta 8.8 (Seconda legge elementare di Laplace). d~F = i d`× ~B.
La forza agente su un tratto di circonferenza e dovuta alla somma delle forze di Lorentz(figura 8.2):
~F =
∫ C
AΓ
i d`× ~B
Figura 8.2: Forza di Lorentz [2]
La combinazione delle due leggi elementari di Laplace consente di calcolare la forzacomplessiva che un circuito (percorso da corrente i1) esercita su un altro (i2):
~F =µ0
4πi1i2 ·
∮Γ2
d`2 ×(∮
Γ1
d`1 × ~rr3
)Definizione 90 (ampere [A]). Intensita della corrente che, quando circola in due fili postia 1 m di distanza tra loro, produce una forza pari a 2 · 10−7 N/m su ciascun filo.
2 · 10−7 dipende da µ0 = 4 · 10−7, quindi la costante µ0 determina il valore dell’amperee di tutte le altre unita di misura elettromagnetiche del Sistema Internazionale.
1L’elemento di corrente i d` e solo un costrutto mentale, perche non puo scorrere corrente in un circuitoaperto.
132 8 - Magnetostatica

Fisica generale CC© BY:© $\© =©
Figura 8.3: Campo magnetico di un filo rettilineo infinito [2]
Campo magnetico di un filo rettilineo infinito. Si vuole determinare il campo ~B inun punto P a distanza d da un filo rettilineo AB = ` percorso da una corrente i (figura 8.3).In particolare, si vuole valutare il caso ` d (`→∞).
• Si sceglie opportunamente un sistema di coordinate: O sull’asse del filo, alla stessaquota di P ; l’asse z lungo il filo e con il verso della corrente.
• d ~B e normale al piano ed entrante nel punto P :
dB =µ0
4π
i dz
r2senϑ
• Bisogna integrare tra i valori estremi di ϕ, quindi bisogna trasformare:
senϑ = cosϕ
z = d tgϕ
⇒ dz =d
cos2 ϕdϕ
r =d
cosϕ
⇒ dB =µ0i
4πdcosϕdϕ
B =µ0i
4πd
∫ ϕ2
ϕ1
cosϕdϕ
=µ0i
4πd( senϕ2 − senϕ1)
• Con `→∞ si ha che ϕ2 →π
2e ϕ1 → −
π
2, quindi:
B → µ0i
2πd
che e una valida approssimazione per ` d.
8.1.1 Divergenza di ~B
Il campo ~B e sempre indivergente, quindi solenoidale:
∇ · ~B = 0 oppure ΦSC
(~B)
= 0
Queste proprieta valgono sia per i dipoli magnetici, sia per i campi prodotti da correnti, neiquali ogni d ~B gode delle proprieta e in generale si applica il principio di sovrapposizionecon la relazione:
∇ ·(~a×~b
)=(∇× ~a
)·~b− ~a ·
(∇×~b
)
8.1 - Correnti e campi magnetici 133

Fisica generale CC© BY:© $\© =©
Dimostrazione che il campo magnetico e indivergente.
∇ · d ~B = ∇ ·
(d`× (~r − ~r′)|~r − ~r′|3
)
= (∇ · d`)︸ ︷︷ ︸0
·~r − ~r′
|~r − ~r′|3− d` ·
(∇× ~r − ~r′
|~r − ~r′|3
)︸ ︷︷ ︸
0
= 0
Nel primo termine nullo d` e indipendente da ~r, quindi la derivata e nulla; nelsecondo termine nullo si tratta del rotore di un campo conservativo.
E impossibile separare polo nord da polo sud, quindiper ogni superficie chiusa che contengaun bipolo magnetico entrano tante linee di campo quante ne escono.
Figura 8.4: Calcolo del rotore del campo magnetico [2]
8.1.2 Rotore di ~B
Si considera un filo molto lungo e due linee chiuse lungo le quali calcolare la circuitazionecon un sistema di riferimento cilindrico (figura 8.4):
~B =µ0i
2πrut
d` = dr ur + r dα ut + dz k
~B · d` =µ0i
2πrut ·
(dr ur + r dα ut + dz k
)=
µ0i
2πr· (r dα)
=µ0i
2π· (dα)∮
l1
~B · d` =
∫ α0+2π
α0
µ0i
2π· (dα)
= µ0i∮l2
~B · d` =
∫ α0
α0
µ0i
2π· (dα)
= 0
Si nota subito che ~B non e conservativo perche la circuitazione dipende dal percorso lungoil quale si calcola.
Proprieta 8.9 (Legge della circuitazione di Ampere). Scelta una qualsiasi linea chiusa,
alla circuitazione di ~B calcolata lungo la linea contribuiscono solo le correnti concatenatecon la linea, anche se i conduttori non sono rettilinei:∮
~B · d` = µ0 ·conc∑k
ik
134 8 - Magnetostatica

Fisica generale CC© BY:© $\© =©
Si puo scrivere la legge di Ampere in forma differenziale, usando il teorema di Stokesper scrivere la corrente totale come flusso del vettore ~J (densita di corrente) attraversouna superficie S (che si appoggia sulla linea lungo la quale si calcola la circuitazione):∮
`
~B · d` =
∫S
∇× ~B · d~S = µ0
∫S
~J · d~S
∫S
(∇× ~B − µ0
~J)
· d~S = 0
Per l’arbitrarieta della superficie S:
∇× ~B = µ0~J
8.1.3 Solenoide
Si usa la legge di Ampere per calcolare il campo ~B prodotto da un solenoide percorso dauna corrente i, con le seguenti ipotesi:
• lunghezza L molto grande (per escludere le regioni vicino ai bordi);
• spire molto vicine (successione continua di spire circolari piane).
Essendo presente una simmetria cilindrica, usando un sistema di coordinate z, r, ϑ si pre-vede che le componenti del campo Bz (assiale), Br (radiale) e Bϑ (trasversa) dipendanosolo dalla distanza r dall’asse. Si puo dimostrare che Br = Bϑ = 0; quindi il campo hadirezione assiale.
Figura 8.5: Calcolo del campo magnetico di un solenoide [2]
Si studia il campo magnetico utilizzando una spira di prova (figura 8.5).
• Quando la spira non e concatenata al solenoide, non esistono correnti concatenatecon la linea chiusa:
B1`−B2` = 0 ⇒ B1 = B2
cioe B e uniforme all’esterno. A grande distanza B = 0, quindi ~B = 0 all’esternodel solenoide.
• Se si sposta la linea chiusa concatenandola al solenoide, si nota che anche al suo
interno B e uniforme. Il numero di spire concatenate alla linea chiusa eN
L` = n`.
Il campo esterno e nullo, quindi:
Bint · = µ0N
L · i ⇒ Bint = µ0n · i uniforme
Il solenoide e analogo al condensatore piano in quanto ad uniformita interna, quindi eadatto per valutare in modo semplice la densita di energia del campo magnetico.
8.1 - Correnti e campi magnetici 135

Fisica generale CC© BY:© $\© =©
8.1.4 Potenziale vettore
Analogamente al campo elettrostatico, e possibile definire un potenziale che consente unadescrizione alternativa del campo magnetico.
ELETTROSTATICA ∇× ~E = 0
~E = −∇V + ∇ · ~E =ρ
ε0V ⇒ ∇2V = − ρ
ε0
MAGNETOSTATICA ∇ · ~B = 0
~B = ∇× ~A + ∇× ~B = µ0~J ⇒ ∇2 ~A = −µ0
~J
Analogamente al potenziale V (r):
~A(~r)
=µ0
4π
∫∫∫ ~J ′ (~r)
|~r − ~r′|dV ′
8.1.5 Casi notevoli di campo magnetostatico
La tabella 8.1 riporta un elenco di moduli di campi magnetici∣∣∣ ~B∣∣∣ notevoli.
B =µ0
2π· i ·
riR2
(all’interno)
Filo cilindrico infinito
B =µ0
2π· i ·
1
re(all’esterno)
Solenoide B = µ0 · i ·n
Toroide B =µ0
2π· i ·
N
r
Lamina piana B =µ0
2· J
Doppia lamina piana B = µ0 · J
Tabella 8.1: Campi magnetici notevoli
Figura 8.6: Campo magnetico prodotto da una lamina piana [2]
Campo magnetico di una lamina piana. Una lamina piana con sopra una densitadi corrente ~J divide lo spazio in due piani 1 e 2 (figura 8.6).
• Bz = 0 (legge di Biot-Savart: il campo e perpendicolare alle correnti).
• By = 0 (i contributi delle correnti in x > 0 annullano quelli delle correnti in x < 0).
• Bx 6= 0:
– nelle vicinanze della lamina: |B1| = |B2|;
136 8 - Magnetostatica

Fisica generale CC© BY:© $\© =©
– lungo la linea chiusa si calcola la circuitazione:
B1`+B2` = µ0J` e B1 = B2 ⇒ B1 = B2 =µ0J
2
~B1 = −µ0J
2i , ~B2 =
µ0J
2i
Campo magnetico di una doppia lamina piana (con correnti superficiali op-
poste. Le due lamine danno contributi opposti a ~B, quindi ~B1 = ~B3 = 0. Allora~B2 = ∆ ~B = µ0Ji.
8.2 Forza di Lorentz
Si puo associare il campo magnetico alla presenza delle cariche elettriche in movimentodentro un conduttore, esprimendo d ~B in termini di ~J (che e collegata alla velocita di derivadelle cariche).
~J = Nq~vd
i d` =(~J dS
)d` = ~J dV
= (N dV )q~vd
=∑i
q~vi (N · dV portatori di carica)
d ~B =µ0
4πid`× ~rr3
=µ0
4π
~J × ~rr3
dV
=∑k
µ0
4π
q~vk × ~rr3
dV
~B =µ0
4π
q~v × ~rr3
dV
Due precisazioni:
• cariche di segno opposto, aventi la stessa velocita, danno contributi opposti a ~B;
• l’espressione e corretta solo per velocita molto piccole rispetto alla velocita della luce.
Definizione 91 (Forza di Lorentz). Una particella carica che si muove all’interno di uncampo elettrico e di un campo magnetico subisce una forza che ha un contibuto elettrico(~F = q ~E) e un contributo magnetico (~F = q~v × ~B):
~f = q(~E + ~v × ~B
)Caratteristiche della forza di Lorentz.
1. Compie lavoro nullo sulla carica su cui agisce, dunque si conserva l’energiacinetica:
δL = ~f · d~r = ~f ·~v dt = q(~v × ~B
)·~v︸ ︷︷ ︸
0 perche ~f⊥~v
dt = 0
2. Si conserva la quantita di moto delle particelle. La sola forza magneticaapparentemente viola il Terzo Principio della Dinamica, ma col contributo dellaforza elettrica si ristabilisce la validita del principio.
3. La forza magnetica e molto piu debole della forza elettrica (perche le forzemagnetiche sono di origine relativistica).
4. E una grandezza relativa: dipendendo dalla velocita delle cariche, cambia da unsistema di riferimento inerziale ad un altro.
8.2 - Forza di Lorentz 137

Fisica generale CC© BY:© $\© =©
Figura 8.7: Moto di una particella carica in un campo magnetico uniforme [2]
8.2.1 Moto di una particella carica in un campo magnetico uni-forme
Si considera una particella in moto dentro ad un campo magnetico uniforme ~B uscentedal piano del foglio (figura 8.7), con ~v ⊥ ~B.
La forza di Lorentz ha modulo f = qvB ed e diretta perpendicolare a ~B e a ~v. L’acce-
lerazione ha modulo a =qvB
m. Il moto ha le caratteristiche del moto circolare uniforme,
con accelerazione solo centripeta:
a =v2
r=qvB
m
Quindi, la traiettoria e una circonferenza di raggio r =mv
qBe pulsazione ω0 =
v
r= qB
m .
8.2.2 Effetto Hall
Si puo descrivere l’azione collettiva del campo magnetico sui portatori di carica presentiin un dato volume dV come l’azione di un campo elettromotore efficace (non conservativo)agente sulla carica totale Nq dV :
~EH =~J
Nq× ~B
Figura 8.8: Effetto Hall [2]
Nei due casi di figura 8.8, cariche e velocita hanno segno opposto: quindi, la forza diLorentz e sempre diretta lungo i. Questa forza determina uno spostamento trasversale dicariche, con accumulo sui due lati di cariche di segno opposto: quindi c’e una d.d.p. tra idue bordi.
Quando ~EH = ~ES lo spostamento termina e il valore di ~B e noto:
V1 − V2 = ±ES · d =J ·BN · q
· d
138 8 - Magnetostatica

Fisica generale CC© BY:© $\© =©
dove il segno ± dipende dal segno della carica q.
8.2.3 Spire e aghi magnetici
Definizione 92 (Momento di dipolo magnetico). Misura dell’intensita di magnetismodi un sistema, che quantifica il contributo del magnetismo interno al campo magneticoprodotto esternamente:
~m = i d`× ~r[A · m2
]
Teorema 19 (dell’equivalenza tra spira e ago magnetico). Purche esista la relazione
~m = i ·S · k, magnete e spira si equivalgono.
Nota 8.2.1. ~m e il momento di dipolo magnetico del magnete; i e la corrente che scorre nella spira; S el’area della spira; k e il versore perpendicolare al piano della spira.
L’equivalenza e rintracciabile in due aspetti fisici:
1. spira e magnete producono lo stesso campo magnetico ~B;
2. posti all’interno di uno stesso campo ~B, spira e magnete subiscono la stessa azionemeccanica.
Dimostrazione che spira e magnete producono lo stesso campo ~B sull’asse. Perla spira:
Bz 'µ0
2π·iS
d3=µ0
2π·m
d3(spira)
Per il magnete, il contributo del polo p1 e:
B =µ0
4π·p1
r2
Schematizzando il magnete con due poli come fossero cariche puntiformi:
Bz =µ0
4π·
(p(
d− l2
)2 − p(d+ l
2
)2)
' µ0
4π·p(d+− l
2
)2 − p (d− l2
)2d4
' µ0
4π·
2pld
d4
' µ0
4π·m
d3(magnete)
Per cui, l’unico modo di avere lo stesso campo e avere uguaglianza nei moduli:m = iS.
Dimostrazione degli effetti meccanici su spira e magnete. Si parte dal momen-to meccanico ~M = ~p× ~E agente sul momento di dipolo elettrico ~p situato in uncampo esterno ~E. Per analogia vale ~M = ~m× ~B. Lo stesso vale per l’energiapotenziale:
UE = −p · ~E ⇒ UM = −m · ~B
Una spira di area S subisce ~M = i~S × ~B: se ~m = i~S, ago e spira subiscono lestesse azioni meccaniche.
Spira immersa in un campo magnetico uniforme
Una spira rettangolare indeformabile (dimensioni a × b) e percorsa dalla corrente i e haun asse coincidente con l’asse x (figura 8.9). Si vuole calcolare il momento delle forze
magnetiche che agiscono sulla spira quando e immersa in un campo uniforme ~B = B · j.
8.2 - Forza di Lorentz 139

Fisica generale CC© BY:© $\© =©
Figura 8.9: Spira immersa in un campo magnetico uniforme [2]
• Le forze che agiscono sui lati contrapposti lunghi b sono opposte e lungo la stessaretta d’azione, dunque non hanno effetto.
• Le forze che agiscono sui lati lunghi a sono parallele a ~k e sono una coppia di bracciob senϑ, con momento:
~M = F · b · senϑ i
= (i · a ·B) · b · senϑ i
= i · S︸︷︷︸a · b
·B · senϑ i
Usando il vettore superficie ~S invece del suo modulo S:
~m = i~S~M = i~S ×Bj = ~m× ~B
140 8 - Magnetostatica

CAPITOLO 9
Campi elettromagnetici
9.1 Legge di Faraday-Lenz
Faraday scoprı sperimentalmente che, facendo interagire una spira con un magnete o conun’altra spira percorsa da corrente, su di essa e possibile ottenere una corrente indotta.
• Un magnete induce corrente in una spira solo se si muove rispetto ad essa.
• Una spira percorsa da corrente induce corrente in una spira solo se la corrente chepercorre la spira induttrice non e stazionaria.
Gli effetti osservati sono dovuti alla variazione temporale del flusso Φ( ~B) del campomagnetico concatenato con la spira.
Proprieta 9.1 (Legge di Lenz). Il verso in cui circola la corrente indotta su una spira etale da generare un campo magnetico che si oppone alla variazione che lo ha generato.
La legge di Lenz mostra che il sistema tende a conservare il proprio stato, cercando diopporsi quando viene allontanato da una situazione di equilibrio stabile.
Proprieta 9.2 (Legge di Faraday). La circolazione di una corrente indotta nella spiradimostra l’esistenza di una forza elettromotrice indotta, prodotta dalla variazione di flusso:
εind = −dΦ( ~B)
dt
[V =
Wb
s=
T · m2
s
]dove il segno formalizza la legge di Lenz.
9.1.1 Induzione per moto relativo tra spira e campo magnetico:traslazione
Figura 9.1: Flusso tagliato per traslazione
Si estrae con velocita costante ~v una spira rettangolare da un campo magnetico ~Buniforme e perpendicolare al piano della spira (situazione di flusso tagliato, figura 9.1).

Fisica generale CC© BY:© $\© =©
Per la traslazione, gli elettroni della spira hanno tutti velocita di trascinamento ~v. Ilcampo elettromotore macroscopico locale e:
~Eem = ~v × ~B
~Eem non produce effetti sul lati ad esso perpendicolari (AB e CD), mentre sugli altri latispinge le cariche: da D verso A, da C verso B.
• Finche la spira e del tutto immersa nel campo, esso origina una d.d.p. lungo AD eBC:
∆V = VD − VA = VC − VD = v ·B · l
Quindi, la circuitazione di ~Eem e la forza elettromotrice indotta εind sono nulle.Questo risultato e valido anche per la legge di Faraday: il flusso resta costante,durante il moto.
• Quando la spira comincia a uscire dal campo, la circuitazione di ~Eem diventa diversada zero:
εind = v B l
Si sceglie come verso positivo quello antiorario. La normale n ha lo stesso verso di~B.
Indicando con x la coordinata di E (variabile col moto) si ha:
Φ = B · l ·xdΦ
dt= B · l ·
dx
dt= −B · l · v
= (negativo perche x diminuisce nel tempo, col moto)
εind = −dΦ
dt= v ·B · l
(I risultati sono uguali sia usando la legge di Faraday, sia usando la forza di Lorentz.)
Quindi, la forza elettromotrice dovuta al flusso tagliato e prevedibile e calcolabile usandola legge di Lorentz. Quando la circuitazione del campo elettromotore e diversa da zero, laspira Γ diventa sede della f.e.m. indotta:
ε(mov)ind =
∮Γ
(~v × ~B
)· d~r
Sulla corrente che circola nella spira agisce una forza che si oppone all’estrazione dellaspira dalla regione in cui e presente il campo magnetico. Il lavoro compiuto per estrarrela spira e uguale all’energia termica dissipata dalla corrente, per effetto Joule, nella spirastessa.
9.1.2 Induzione per moto relativo tra spira e campo magnetico:rotazione
Figura 9.2: Flusso tagliato per rotazione
Si fa ruotare con velocita angolare ~ω una spira rettangolare attorno a un asse fissoverticale (asse mediano) entro un campo magnetico ~B uniforme (figura 9.2).
142 9 - Campi elettromagnetici

Fisica generale CC© BY:© $\© =©
• Le forze di Lorentz agenti sulle cariche nei conduttori orizzontali (di lunghezza a)non danno contributo alla f.e.m., perche sono perpendicolari ai conduttori.
• Le cariche di conduzione nei tratti verticali (di lunghezza l) si muovono rispetto a~B con velocita v = a
2ω. Se ϑ e l’angolo tra ~v e ~B, il campo elettromotore derivantedalla forza di Lorentz e:
~Eem =−e ·~v × ~B
−e= ~v × ~B
parallelo ai lati di lunghezza l.
Eem = v ·B · senϑ
∆V = l ·Eem = v ·B · l · senϑ (d.d.p. tra gli estremi del tratto lungo l )
Poiche i due campi elettromotori agenti sui lati l hanno versi opposti, i loro contributialla circuitazione si sommano:
ε = 2 · ∆V = 2vBl senϑ
= ωBal senϑ
= ωΦ senϑ
Φ = B · a · l e il flusso massimo attraverso la superficie della spira (quando ~B e nsono paralleli e di verso concorde).
• Al variare di ϑ nel tempo, senϑ assume valori sia positivi sia negativi. Assumendoε0 = ωBal:
ε = ε0 senωt se la spira e aperta
i =ε
R=ε0
Rsenωt se la spira e chiusa
9.1.3 Induzione di trasformazione
Le variazioni di flusso attraverso una spira Γ ferma nel SdR sono dovute alla variazionenel tempo di un campo magnetico nelle vicinanze:
ε(tra)ind =
∮Γ
~Eem · d~r = −dΦ( ~B)
dt= − d
dt
∫S
~B · d~S
L’integrale va calcolato su una qualunque superficie S che si appoggia alla spira Γ ma,dato che Γ e fissa, allora S e indipendente dal tempo e Φ( ~B) puo cambiare solo se cambia
il campo ~B:
ε(tra)ind = −
∫S
∂ ~B
∂t· d~S
Per il teorema di Stokes vale anche:
ε(tra)ind =
∮Γ
~Eem · d~r =
∫S
(∇× ~Eem
)· d~S
da cui si deduce che il campo elettromotore soddisfa l’ulteriore equazione:
∇× ~Eem = −∂~B
∂t
Il campo elettromotore non e associabile alla forza di Lorentz (non c’e moto), ma a un
campo elettrico indotto indicato con ~Ei:∮Γ
~Ei · d~r = −∫∂ ~B
∂t· d~S∫ (
∇× ~Ei
)· d~S = −
∫∂ ~B
∂t· d~S
∇× ~Ei = −∂~B
∂t
9.1 - Legge di Faraday-Lenz 143

Fisica generale CC© BY:© $\© =©
C’e forte analogia tra le equazioni per ~Ei e quelle per un campo magnetico stazionario~Bstaz:
• entrambi i campi hanno divergenza nulla (non esistono sorgenti per ~Ei);
• nelle equazioni dei rotori, −∂~B
∂tha per ~Ei lo stesso ruolo di µ0
~J per ~Bstaz.
9.1.4 Mutua induzione e autoinduzione
E ammissibile calcolare campi e flussi variabili nel tempo con le equazioni della magneto-statica (leggi di Laplace e Ampere) quando le variazioni sono lente e vicine alle sorgenti(condizione di quasi-stazionarieta).
Definizione 93 (Mutua induttanza (coefficiente di mutua induzione)). Per i mezzi lineari(B ∝ i), in un caso in cui siano presenti due circuiti, si possono scrivere i flussi concatenatitra i due, legandoli da un fattore M :
Φ2
(~B1
)= M12 · i1
Φ1
(~B2
)= M21 · i2
M12 = M21
Φ(~B)
= M · i
La mutua induttanza M dipende solo dalla geometria dei due circuiti:
M =Φ( ~B)
i
[Wb
A= H (henry)
]
Si puo riformulare la legge di Faraday come ε = −M d i
dt.
Definizione 94 (Induttanza (coefficiente di autoinduzione)). Se in un circuito varial’intensita di corrente, si ha una variazione del flusso concatenato con il circuito stesso:
Φ(~B)
= L · i
L’induttanza L, analogamente a M , dipende solo dalla geometria dei due circuiti:
L =Φ( ~B)
i
[Wb
A= H (henry)
]Per la legge di Faraday, un circuito percorso da corrente variabile e sede di una f.e.m.
che si oppone alla variazione che l’ha generata, dunque:
ε = −Ld idt
In generale, la f.e.m. indotta su un circuito percorso dalla corrente variabile i1, sotto-posto al flusso del campo creato da un circuito vicino dove scorre la corrente variabile i2,e:
ε1 = −L1d i1dt−M d i2
dt
L rappresenta la tendenza di un circuito isolato a conservare il valore istantaneo dellacorrente che lo sta percorrendo (inerzia). M e il suo analogo, in presenza di un altrocircuito.
La tabella 9.1 riporta un elenco di induttanze notevoli.
144 9 - Campi elettromagnetici

Fisica generale CC© BY:© $\© =©
L = µ0AN2
lSolenoide N spire, area di sezione A
L ' µ0
πlnd−RR
Conduttori paralleli raggio R, distanza d
L =µ0µr2π
N2a lnr + a
rToro a sezione quadrata lato a, raggio interno r
L =µ0µr2π
lnr2
r1Cavo coassiale conduttori di raggio r1 < r2
Tabella 9.1: Induttanze notevoli
Calcolo dell’induttanza di un solenoide (infinito)
Si pone l’ipotesi che solenoide sia di lunghezza infinita lS , cosicche il campo magneticoall’interno sia uniforme di modulo:
B = µ0iNSlS
ovunque
Sapendo che l’area interna e A, il flusso interno e la somma dei singoli flussi delle NS spireche compongono il solenoide:
Φ( ~B) = B ·NS ·A = µ0iA ·NS2
lS
Allora:
L =Φ( ~B)
i=µ0 i
A ·NS2
lS
i= µ0
A ·NS2
lS
Induttanze in serie e in parallelo
In generale, si assume che ogni induttanza abbia resistenza RL = 0, nel senso che essa etrascurabile rispetto a tutti gli altri elementi del circuito.
Induttanze in serie disaccoppiate (M = 0). Non si inducono vicendevolmente:
LTOT =∑k
Lk
Induttanze in serie accoppiate (M 6= 0). Si inducono vicendevolmente. Per dueinduttanze:
LTOT = L1 + L2 ± 2M
Il segno con cui operare su 2M dipende dal verso di mutua induzione, cioe se il flussodovuto alla mutua induzione e concorde (si aggiunge) o discorde (si sottrae) rispetto alflusso per autoinduzione (figura 9.3).
Figura 9.3: Induttanze in serie accoppiate [2]
Si ha anche che M2 = k ·L1 ·L2, con 0 < k < 1 che misura il grado di accoppiamento1.
1k = 1 indica che l’accoppiamento tra le induttanze e totale.
9.1 - Legge di Faraday-Lenz 145

Fisica generale CC© BY:© $\© =©
Induttanze in parallelo.1
LTOT=
1∑k Lk
.
9.1.5 Energia del campo magnetico
Per variare la corrente in un circuito serve un lavoro esterno per contrastare la f.e.m.indotta: questa energia non viene dissipata da alcuna parte, quindi deve ritrovarsi sottoforma di energia potenziale.
Considerando un’induttanza L percorsa dalla corrente i:
ε = −Ld idt
forza contro-elettromotrice ai capi dell’induttanza
dL = ε dq = ε · i dt lavoro svolto quando il circuito e attraversatodalla carica elementare dq
dLest = − dL = Ld i
dt· i dt = L i di lavoro esterno necessario per avere corrente variabile
Lest =
∫ i
0
L · i di =1
2Li2 lavoro complessivo
UB =1
2Li2 energia potenziale
Come si nota, c’e conservazione dell’energia essendo Lest = UB .Dal caso specifico di un solenoide di grande lunghezza, con campo interno uniforme, si
ricava una formula di validita generale:
L = µ0ANS
2
lS⇒ UB = µ0
ANS2i2
2lSV = A · lS (volume)
uB =
dUBdV
=1
2µ0
(NS · ilS
)2
=1
2µ0
(B
µ0
)2
Definizione 95 (Densita di energia). uB (~r) =B2 (~r)
2µ0.
Circuito oscillante
Si considera un circuito composto da un induttore L e un condensatore C, con un inter-ruttore D aperto o chiuso.
• D aperto: C e carico con carica q;
• D chiuso: C si scarica, facendo circolare corrente su L.
Nell’ipotesi di resistenza del circuito nulla (R = 0) e di perdite di energia per emissionielettromagnetiche trascurabili, si ha la conservazione dell’energia:
UB =1
2Li2
UE =1
2
q2
C
1
2Li2 +
1
2
q2
C= cost.
Si deriva rispetto al tempo:
Lid i
dt+q
C
d q
dt︸︷︷︸i
= i ·(Ld i
dt+q
C
)= 0
Soluzioni:i = 0 C inizialmente scarico, non ha energia per far scorrere corrente
Ld i
dt+q
C= 0
146 9 - Campi elettromagnetici

Fisica generale CC© BY:© $\© =©
Si sviluppa l’equazione differenziale per trovare la corrente nel caso non banale i = 0:
Ld i
dt+q
C= 0
Ld2 q
dt2+q
C= 0
d2 q
dt2+
q
LC= 0
q(t) = q0 sen
(1√LC
t+ ϕ
)i(t) =
d q
dt=
q0√LC
cos
(1√LC
t+ ϕ
)Tra q(t) nel condensatore e i(t) nell’induttanza c’e uno sfasamento di
π
2, quindi quando
l’energia e tutta in forma magnetica l’energia elettrostatica e nulla, e viceversa: l’energia
si trasferisce da una forma all’altra in maniera continua, con pulsazione ω0 =1√LC
.
Fenomeni transitori
Si considera un circuito alimentato dalla tensione ε composto da un’induttanza L e unaresistenza R, con un commutatore su due possibili posizioni A e B (figura 9.4). Si ipotizzaRL R per separare il ruolo dell’induttanza da quello della resistenza.
Figura 9.4: Circuito di carica-scarica di un’induttanza
• Commutatore in posizione B: non circola corrente.
• Commutatore in posizione A: circola corrente. La corrente e quasi-stazionaria,quindi si puo usare la legge di Kirchhoff delle maglie:
ε− Ld idt−Ri = 0
d i
ε−Ri=
d t
L∫ i(t)
0
d i
ε−Ri=
∫ t
o
d t
L
− 1
Rlnε−R i(t)
ε=
1
Lt
i(t) =ε
R
(1− e−RL t
)Definizione 96 (Costante di tempo). τ =
L
R[s].
La corrente passa da 0 (appena si commuta su A) al valore asintoticoε
R(extracor-
rente di chiusura, figura 9.5) quando si annullano gli effetti dell’autoinduzione. Perla legge di Faraday:
∆VL(t) = −Ld idt
= −εeRL t
9.1 - Legge di Faraday-Lenz 147

Fisica generale CC© BY:© $\© =©
• Quando asintoticamente i =ε
R, si pone il commutatore in posizione B (ε = 0)
−Ld idt−Ri = 0
d i
i= −R
Ldt
i(t) = i0e−RL t
=ε
Re−
RL t
Questa corrente e l’extracorrente di apertura (figura 9.5), che continua a circolarenello stesso verso per effetto dell’induttanza.
Figura 9.5: Circuito di carica-scarica di un’induttanza: extracorrente di chiusura (a sinistra) e di apertura(a destra) [2]
Proprieta 9.3. Un sistema RL fornisce ai capi di L la derivata del segnale di tensione εin ingresso, mentre ai capi di R ne fornisce l’integrale.
9.2 Equazioni di Maxwell
Si riassumono le leggi di Gauss e Faraday (per ~E) e di Gauss e Ampere (per ~B) riferendosialle proprieta locali dei campi elettrico e magnetico, espresse attraverso le loro divergenzee i loro rotori2:
∇ · ~E =ρ
ε0(legge di Gauss)
∇× ~E = −∂~B
∂t(legge di Faraday)
∇ · ~B = 0 (legge di Gauss per il magnetismo)
∇× ~B = µ0~J (legge di Ampere della circuitazione)
Maxwell rilevo un’inconsistenza tra la legge di Ampere e la legge di conservazione della
carica ∇ · ~J = −∂ρ∂t
. Infatti, per la legge di Ampere, si avrebbe:
∇ · ~J =1
µ0∇ ·
(∇× ~B
)︸ ︷︷ ︸
0
= 0 6= −∂ ρ∂t
Maxwell ipotizzo che siano sorgenti di campo magnetico sia le correnti di conduzione, siale correnti di spostamento.
~J corrente di conduzione
~JS = ε0∂ ~E
∂tcorrente di spostamento
2Le equazioni di Maxwell sono qui espresse in forma differenziale cioe locale: sono valide ovunque ilcampo sia continuo. Si possono scrivere le equivalenti in forma integrale, con validita piu generale.
148 9 - Campi elettromagnetici

Fisica generale CC© BY:© $\© =©
~JS rende solenoidale il vettore somma ~J + ~JS :
∇ ·(~J + ~JS
)=
(−∂ ρ∂t
+ ε0∂(∇ · ~E)
∂t
)
= −∂ ρ∂t
+∂ ρ
∂t= 0
Si arriva, cosı, a una nuova definizione del rotore del campo magnetico.
Proprieta 9.4 (Legge di Ampere-Maxwell). L’esistenza di un campo elettrico variabilenel tempo e sufficiente a determinare l’insorgere di un campo magnetico:
∇× ~B = µ0
(~J + ~JS
)= µ0
(~J + ε0
∂ ~E
∂t
)
Proprieta 9.5 (Equazioni di Maxwell).∇ · ~E =
ρ
ε0
∇× ~E = −∂~B
∂t
∇ · ~B = 0
∇× ~B = µ0
(~J + ε0
∂ ~E
∂t
)
Proprieta 9.6 (Equazioni di Maxwell nel vuoto). Sono assenti le cariche (ρ = 0) e le
correnti ( ~J = 0): ∇ · ~E = 0
∇× ~E = −∂~B
∂t
∇ · ~B = 0
∇× ~B = µ0ε0∂ ~E
∂t
La legge di Faraday e la legge di Ampere-Maxwell (assieme alle divergenze nulle),essendo simmetriche avendo ciascuna un rotore legato alla variazione temporale dell’altro,mostrano che le variazioni di ~E e ~B nello spazio e nel tempo sono estremamente connessee suggeriscono la presenza di un’entita fisica che sia unica (il campo elettromagnetico).
9.2.1 Ridefinizione del potenziale vettore
∇ · ~B vale anche nel caso non stazionario, quindi si puo ancora scrivere il potenziale vettore:
~B = ∇× ~A
Allora:
∇× ~E = −∂~B
∂t= − ∂
∂t
(∇× ~A
)= ∇×
(−∂
~A
∂t
)
⇒ ∇×
(~E +
∂ ~A
∂t
)= 0
Non e piu conservativo il campo elettrico, ma la somma ~E+∂ ~A
∂t: quindi si ha il potenziale
scalare ϕ (che sostituisce il potenziale V del caso stazionario) tale che:
~E +∂ ~A
∂t= −∇ϕ
Anche nel caso non stazionario, ϕ e ~A non sono univocamente determinati, ma sonopossibili diverse scelte.
9.2 - Equazioni di Maxwell 149

Fisica generale CC© BY:© $\© =©
Definizione 97 (Trasformazioni di gauge dei potenziali elettromagnetici). Scelta una
funzione χ(~r, t) arbitraria, ϕ′ e ~A′ danno origine agli stessi campi ~B e ~E: ϕ′ = ϕ− ∂ χ(~r, t)
∂t~A′ = ~A+∇χ(~r, t)
Proprieta 9.7 (Gauge di Lorenz (ristretta)). ∇ · ~A+ µε∂ ϕ
∂t= 0.
χ soddisfa l’equazione di D’Alembert delle onde (definizione 102):
∇2χ− µε∂2 χ
∂t2= 0
Con la calibratura di Lorenz si puo scrivere: ∇2 ~A− µε∂
2 ~A
∂t2= −µ~J
∇2ϕ− µε∂2ϕ
∂t2= −ρ
ε
che generalizza
∇2 ~A = −µ0
~J
∇2V = − ρ
ε0
Definizione 98 (Potenziali ritardati). Se le sorgenti sono localizzate in una zona fini-ta dello spazio, le equazioni generalizzate hanno una soluzione che generalizza il casostazionario:
~A (~r, t) =µ0
4π
∫ ~J(~r′ , t− |~r−~r
′|c
)|~r − ~r′|
dV ′
ϕ (~r, t) =1
4πε0
∫ ρ(~r′ , t− |~r−~r
′|c
)|~r − ~r′|
dV ′
Rispetto al caso stazionario, ~J e ρ vanno calcolati in un istante di tempo anticipato:
t′ = t− |~r − ~r′|
c
t′ e il tempo necessario ai segnali elettromagnetici per percorrere la distanza tra ~r′ e ~r(dove si calcola il potenziale) con velocita della luce c.
Definizione 99 (Velocita della luce nel vuoto). c =1
√ε0µ0
= 2, 998 · 108 [m/s].
9.2.2 Estensione del coefficiente M di mutua induzione
Avendo un numero qualsiasi di circuiti che interagiscono, si puo ridefinire il coefficiente dimutua induzione.
Definizione 100 (Flusso concatenato di n circuiti). Il j−esimo circuito percepisce unflusso concatenato dagli altri n circuiti presenti pari a:
Φj = L · ij +
n∑k=1k 6=j
ik ·Mjk
Definizione 101 (Coefficiente di mutua induzione). I circuiti j−esimo e k−esimo siinducono vicendevolmente:
Mjk =µ0
4π
∮Cj
∮Ck
d`j · d`k|~r − ~r′|
con j 6= k
150 9 - Campi elettromagnetici

Fisica generale CC© BY:© $\© =©
9.2.3 Considerazioni di riepilogo sui campi elettromagnetici
La correzione di Maxwell collega strettamente tra loro i campi elettrici e magnetici. Ilcollegamento (visibile nella forma differenziale delle equazioni di Maxwell) e locale:
caratteristiche dei campi caratteristiche dei campi caratteristiche dei campiQUI VICINO ⇒ QUI ⇒ NELLE VICINANZE
POCO FA ORA TRA POCO
Sono forti le analogie con i mezzi elastici e le onde in essi provocate a seguito diperturbazioni. In ambito elettrico, qualitativamente, il processo e il seguente:
1. un campo elettrico subisce localmente una breve variazione ∆ ~E in ∆t;
2. legge di Ampere-Maxwell : si concatena un campo magnetico ~B (di intensita propor-
zionale alla rapidita di variazione). ~B non e costante, quindi ci sono variazioni ∆ ~Bin ∆t;
3. legge di Faraday : si induce un campo elettrico ~E dipendente dal tempo;
4. . . .
Il processo a catena continua nel tempo e si propaga nello spazio con onde di velocitafinita (c).
9.3 Onde piane
Definizione 102 (Equazione d’onda (di D’Alembert)). ∇2f =1
v2·∂2 f
∂t2.
Fra le soluzioni dell’equazione di D’Alembert ci sono campi con particolari dipendenzedalle coordinate di spazio e tempo: questi legami caratterizzano i campi come onde che sipropapagno senza distorsione alla velocita della luce. Anche i campi costanti soddisfanol’equazione, ma non hanno le caratteristiche di un’onda.
Definizione 103 (Onda piana uniforme). E una delle possibili soluzioni dell’equazioned’onda:
~E = ~E0︸︷︷︸cost.
· f (~r · un ± v · t)︸ ︷︷ ︸arg. dipende solo da coord. spaziali
Le onde piane uniformi dipendono solo dalla distanza ~r · un dal piano perpendicolare aun e passante per l’origine. Il campo si sposta per piani sempre paralleli (figura 9.6), suiquali giacciono i punti che formano il luogo che identifica il campo.
Figura 9.6: Onda piana [2]
I piani traslano con velocita ~v = ∓v · un:
• nel verso di un se l’argomento e ~r · un− vt (onda progressiva);
9.3 - Onde piane 151

Fisica generale CC© BY:© $\© =©
• nel verso opposto a un se l’argomento e ~r · un+ vt (onda regressiva).
Dimostrazione che f e una funzione di D’Alembert. Si rinomina l’argomento:
w = ~r · un ± vt
Per ogni f(w) vale:
∂ f
∂t= ±v ·
d f
dw⇒
∂
∂t= ±v ·
d
dw(simbolico)
∂2 f
∂t2= v2 ·
d2 f
dw2
⇒
∂ f
∂x= unx ·
d f
dw∂ f
∂y= uny ·
d f
dw∂ f
∂z= unz ·
d f
dw
• L’azione di ∇ su f e uguale all’azione di un ·d
dw.
• L’azione di ∇2 = ∇ ·∇ e uguale all’azione di
(un ·
d
dw
)·(un ·
d
dw
)=
d2
dw2.
Quindi:
∇ = un ·d
dw(simbolico) ⇒ ∇2 =
d2
dw2(simbolico)
⇒ ∇2f =d2 f
dw2=
1
v2·∂2 f
∂t2
Anche la sovrapposizione di un’onda progressiva e di un’onda regressiva e una possibilesoluzione dell’equazione d’onda:
~E = ~E(p) · f (~r · un − vt) + ~E(r) · g (~r · un + vt)
Tutte le considerazioni fatte valgono, per simmetria, anche per il campo magnetico ~B.
9.3.1 Onde sferiche
I campi rappresentati da onde sferiche sono espressi da funzioni F (r, t) a simmetria sferica,che dipendono dalla distanza r dalla sorgente.
Definizione 104 (Onda sferica). F (r, t) =f(r ∓ vt)
r.
La superficie sferica si espande (onda progressiva) o si contrae (onda regressiva) nel
tempo, con velocita v. L’intensita del campo F varia come1
r, quindi non e costante.
Per distanze molto grandi dalla sorgente, il fronte d’onda (o, meglio, una sua porzione)puo essere assimilato ad un’onda piana.
152 9 - Campi elettromagnetici

Fisica generale CC© BY:© $\© =©
9.3.2 Onde piane monocromatiche (armoniche)
Definizione 105 (Onda piana monocromatica). La funzione f e sinusoidale:
f (~r, t) = A · cos(~k ·~r − ωt+ δ
)= A · cos
[k ·
(~k
k·~r − ω
kt
)+ δ
]= A · cos
[k ·(uk ·~r − ω
kt)
+ δ]
︸ ︷︷ ︸fase dell’onda monocromatica
• ~k e il vettore d’onda, da non confondere col versore k relativo all’asse z.
• ω e la pulsazione dell’onda elettromagnetica.
• La fase dell’onda monocromatica ha la struttura ~r · un ± vt tipica dell’onda piana,ma solo nel caso esista il legame:
ω(~k) = k · c =k
√ε0µ0
relazione di dispersione
• uk =~k
ke il versore che indica la direzione di propagazione.
•ω
ke la rapidita con cui cambia la fase nel tempo (velocita di fase). Un’onda piana
armonica haω
k= c costante per ogni ω: e la velocita con cui si muovono i piani
equifase (superfici d’onda), perpendicolari a uk.
(a) Periodicita temporale (b) Periodicita spaziale
Figura 9.7: Periodicita di un’onda piana monocromatica [2]
Definizione 106 (Periodo di un’onda armonica). Caratterizza la periodicita temporale(figura 9.7(a)) dell’onda armonica:
T =2π
ω=
1
ν
Si puo riscrivere:
f (~r, t) = A cos[~k ·~r − ω(t+ T ) + δ
]Definizione 107 (Numero d’onda). Caratterizza la periodicita spaziale (figura 9.7(b))dell’onda armonica:
k =∣∣∣~k∣∣∣
Definizione 108 (Lunghezza d’onda). λ =2π
k. Vale anche λ = cT .
9.3 - Onde piane 153

Fisica generale CC© BY:© $\© =©
Considerando monodimensionalmente un’onda che si propaga lungo l’asse x:
f(x, t) = A cos(kx− ωt+ δ)
= A cos[k(x+ λ)− ωt+ δ
]Le onde monocromatiche non sono realizzabili: richiederebbero processi di emissione didurata infinita.
Teorema 20 (di Fourier). Ogni perturbazione elettromagnetica fisicamente realizzabilepuo essere rappresentata come sovrapposizione di onde armoniche.
9.3.3 Campi ~E e ~B nelle onde piane
Le equazioni di Maxwell impongono legami ai campi che si propagano per onde nel vuoto.
Per un’onda piana generica che si propaga liberamente nel vuoto:
1. ~E e ~B sono perpendicolari alla direzione di propagazione:
~E · un = 0 , ~B · un = 0
2. ~E e ~B sono sempre paralleli tra loro:
~B =~v × ~E
v2, ~E = ~B × ~v
3. il rapporto tra ~E e ~B e costante e pari alla velocita della luce:
v = c ⇒ E = cB
~E, ~B,~v sono una terna destrorsa, per onde progressive e regressive.
Onde elettromagnetiche che si propagano liberamente nel vuoto sono onde trasversali(onde TEM); sono di questo tipo anche le onde sferiche.
Onde che si propagano nel vuoto, ma in regioni delimitate da guide d’onda, possonoavere componenti longitudinali per i campi (onde TE e TM), per cui solo uno tra campoelettrico e magnetico e perpendicolare. Eccezione e il cavo coassiale, che deve avere ondeTEM per ragioni di simmetria.
Dimostrazione che ~E ⊥ ~B.
∇× ~E =
∣∣∣∣∣∣∣ux uy uz∂
∂x
∂
∂y
∂
∂zEx Ey Ez
∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣ux uy uz
unxd
dwuny
d
dwunz
d
dwEx Ey Ez
∣∣∣∣∣∣∣ =
=d
dw
∣∣∣∣∣∣ux uy uzunx uny unzEx Ey Ez
∣∣∣∣∣∣ =d
dw
(un × ~E
)
Analogamente: ∇× ~B =d
dw
(un × ~B
).
Nel caso di onde progressive, per l’uguaglianza∂
∂t= −v d
dw:
∂ ~E
∂t= −v d
~E
dw,
∂ ~B
∂t= −v d
~B
dw
154 9 - Campi elettromagnetici

Fisica generale CC© BY:© $\© =©
Per la legge di Faraday(∇× ~E = −∂ ~B∂t
):
d
dw
(u× ~E
)= v ·
d
dw~B
d
dw
(u× ~E − v ~B
)= 0(
u× ~E − v ~B)
= cost. = 0
~B =u× ~E
v
=~v × ~E
v2
Definizione 109 (Onda monocromatica piana polarizzata linearmente). Onda nella quale
il campo elettrico mantiene sempre la stessa direzione up ⊥ uk (lo stesso vale per ~B):
~E = E0 cos(~E ·~r − ωt+ δ
)· up
9.4 Energia e impulso nei campi elettromagnetici
Per i campi elettromagnetici non stazionari vale una relazione per la densita di energiatotale che e analoga al caso stazionario.
Definizione 110 (Densita di energia del campo elettromagnetico). u =1
2· ε0E
2︸ ︷︷ ︸contr. ~E
+1
2µ0·B2︸ ︷︷ ︸
contr. ~B
L’analogia e giustificabile col teorema di Poynting, analogo del teorema delle forze viveper l’elettrodinamica.
• Si considera una porzione V dello spazio, contenente il campo elettromagnetico eparticelle cariche in moto, racchiusa in una superficie Σ.
• La forza di Lorentz ~f = q(~E + ~v × ~B
)descrive l’interazione tra campo elettroma-
gnetico e cariche. Nel tempo dt, la forza di Lorentz compie un lavoro elementare:
~f · d~r = q ~E · d~r = q ~E ·~v dt
Il lavoro compiuto nel tempo dt dal campo elettromagnetico su tutte le cariche e:
δL = ~E · ~J︸︷︷︸[ Wm3 ]
dV dt (contributo del solo campo elettrico)
• Si puo esprimere tutto in termini di campi elettromagnetici, sfruttando l’equazionedi Ampere-Maxwell per eliminare ~J :
∇× ~B = µ0
(~J + ε0
∂ ~E
∂t
)⇒ ~J =
∇× ~B
µ0− ε0
∂ ~E
∂t
~E · ~J =
~E ·(∇× ~B
)µ0
− ε0~E∂ ~E
∂t
=
~E ·(∇× ~B
)µ0︸ ︷︷ ︸
nota 9.4.1
− ∂
∂t
(1
2ε0E
2
)
= − ∂
∂t
(1
2ε0E
2 +1
2µ0B2
)− 1
µ0∇ ·
(~E × ~B
)
9.4 - Energia e impulso nei campi elettromagnetici 155

Fisica generale CC© BY:© $\© =©
Nota 9.4.1. Si applica l’identita vettoriale:
∇ · (~v1 × ~v2) = (∇× ~v1) ·~v2 − ~v1 · (∇× ~v2)
⇒ ∇ ·(~E × ~B
)=
(∇× ~E
)· ~B − ~E ·
(∇× ~B
)︸ ︷︷ ︸numeratore
⇒ ~E ·(∇× ~B
)=
(∇× ~E
)· ~B −∇ ·
(~E × ~B
)⇒
~E ·(∇× ~B
)µ0
= −∂
∂t
(B2
2µ0
)−∇ ·
(~E × ~B
µ0
)
• L’energia trasferita per unita di tempo dal campo al volume V e:
∂ Umat∂t
=
∫V
~E · ~J dV
= − ∂
∂t
∫V
(1
2ε0E
2 +1
2µ0B2
)dV −
∫V
∇ ·
(~E × ~B
µ0
)dV
= − ∂
∂t
∫V
(1
2ε0E
2 +1
2µ0B2
)dV −
∮Σ
(~E × ~B
µ0
)dΣ
Teorema 21 (di Poynting). Il flusso di energia attraverso una superficie Σ che racchiu-de il campo compensa la variazione di energia totale (per unita di tempo) e corrispondeall’energia che fuoriesce per unita di tempo, trasportata dal campo elettromagnetico:
∂ Umat∂t︸ ︷︷ ︸
lavoro svolto sulla carica
= − ∂
∂t
∫V
(1
2ε0E
2 +1
2µ0B2
)dV︸ ︷︷ ︸
variazione dell’energia immagazz.
−∮
Σ
(~E × ~B
µ0
)dΣ︸ ︷︷ ︸
flusso di energia entrante/uscente
Per questa interpretazione, il teorema di Poynting e un analogo della legge di conser-vazione dell’energia in elettromagnetismo.
Definizione 111 (Energia del campo elettromagnetico). Uem =
∫V
uem dV .
Definizione 112 (Vettore di Poynting). ~S =~E × ~B
µ0.
Nel teorema di Poynting appare il flusso dell’omonimo vettore:
∂
∂t(Umat + Uem) = −
∮Σ
(~E × ~B
µ0
)dΣ
= −∮
Σ
~S dΣ
Localmente si scrive:∂
∂t(umat + uem) = −∇ · ~S
che e analogo a∂
∂tρ = −∇ · ~J che rappresentava la legge di conservazione della carica.
Nel tempo dt, attraverso dΣ, fluisce l’energia:
dUΣ =~E × ~B
µ0· d~Σ dt = ~S · d~Σ dt
Analogamente, con le forze elettriche agenti su un volume all’interno di una distribuzionedi cariche, si ottiene la quantita di moto d~P associata al volume dV che contiene campi
156 9 - Campi elettromagnetici

Fisica generale CC© BY:© $\© =©
elettrici e magnetici:
d~P =1
c2·~E × ~B
µ0dV
=~S
c2︸︷︷︸densita di impulso
dV
La proprieta del campo di possedere una densita di impulso assicura la conservazionedella quantita di moto del sistema (composto da cariche e campo).
Appendice: riepilogo dei potenziali scalare e vettore
I potenziali associati ai campi elettrico e magnetico cambiano fisionomia nel passaggio dalcaso stazionario al caso generale.
I potenziali nel caso stazionario sono:
V (~r) =1
4πε0
∫∫∫V ′
ρ (~r)
|~r − ~r′|dV ′ , ~A (~r) =
µ0
4π
∫∫∫V ′
~J (~r)
|~r − ~r′|dV ′
perche:∇× ~E = 0 , ∇ · ~B = 0
∇ · ~E =ρ
ε0, ∇× ~B = µ0 · ~J
Quando si passa dal caso stazionario al caso generale, non vale piu ∇ · ~J = 0 ma vale
∇ · ~J = −∂ ρ∂t
:
∇× ~B 6= µ0 · ~J
⇓
∇× ~E 6= 0 ma ∇×
(~E +
∂ ~A
∂t
)= 0
Allora si scrivono i potenziali generici (ritardati):
ϕ (~r, t) =1
4πε0
∫∫∫V ′
ρ(~r′ , t− |~r−~r
′|c
)|~r − ~r′|
dV ′ , ~A (~r, t) =µ0
4π
∫∫∫V ′
~J(~r′ , t− |~r−~r
′|c
)|~r − ~r′|
dV ′
9.4 - Energia e impulso nei campi elettromagnetici 157

Fisica generale CC© BY:© $\© =©
158 9 - Campi elettromagnetici
Parte III
Fisica generale L-B:TERMODINAMICA


CAPITOLO 10
Sistemi termodinamici
Alcuni possibili approcci per la descrizione dei sistemi sono:
microscopico: conoscenza istante per istante dello stato dinamico di ogni singolo com-ponente (dinamica newtoniana). In pratica e inapplicabile per via del numeroelevatissimo di componenti;
statistico: descrizione dei valori medi di alcune grandezze caratteristiche. Dipende dalmodello microscopico utilizzato;
termodinamica classica: descrizione attraverso nuove coordinate macroscopiche, sug-gerite dall’esperienza e definite ad hoc per caratterizzare il sistema nel suo complesso.
Definizione 113 (Sistema termodinamico). Insieme di uno o piu corpi, di composizionenota, che si trovano in una regione di spazio delimitata da superfici che li distinguonofisicamente dagli altri corpi o sistemi con cui possono interagire (ambiente circostante).
Definizione 114 (Universo termodinamico). Unione del sistema in esame con tutti isistemi con esso interagenti (ambiente), che forma un sistema isolato termicamente.
Classificazione dei sistemi termodinamici:
aperto: puo scambiare energia e massa con l’ambiente;
chiuso: piu scambiare solo energia con l’ambiente;
isolato: non puo avvenire alcuno scambio con l’ambiente.
10.1 Coordinate termodinamiche
Sono grandezze fisiche macroscopiche (variabili termodinamiche) suggerite dall’esperienza,direttamente osservabili e misurabili. Sono definite in modo indipendente da qualsiasiipotesi sulla struttura della materia.
Definizione 115 (Coordinata intensiva). Variabile locale, indipendente dalla quantita dimateria nel sistema.
Definizione 116 (Coordinata estensiva). Variabile globale, additiva tra le varie parti delsistema.
Definizione 117 (Volume). Grandezza estensiva, scalare, definibile operativamente, ca-ratteristica di un sistema in una situazione data.
Fisica generale CC© BY:© $\© =©
Definizione 118 (Pressione). Grandezza intensiva, scalare, definibile operativamente,caratteristica del gas in una situazione data.
Definizione 119 (Pressione esterna). Pressione dovuta alle forze esterne al sistema(figura 10.1):
pe =
∣∣∣~f · n∣∣∣
A=f ·n · cosα
A
Figura 10.1: Pressione esterna [3]
Si ha equilibrio meccanico quando p = pe.
10.1.1 Stati termodinamici
Bisogna individuare un numero limitato di coordinate termodinamiche sufficienti a de-terminare lo stato termodinamico del sistema. Molti sistemi possono essere descritti condue sole coordinate macroscopiche indipendenti; altrimenti, possono essere divisi in partidescrivibili in questo modo. Tipico esempio sono le sostanze pure, cioe composte di unasingola specie chimica (atomica o molecolare) e presenti in una sola fase (solida, liquida oaeriforme).
Definizione 120 (Sistema termodinamico semplice). Sistema che puo essere descrittoutilizzando tre coordinate termodinamiche (di cui solo due indipendenti).
Definizione 121 (Sistema idrostatico). Sistema che puo essere descritto utilizzando letre coordinate termodinamiche p, V, T .
Un sistema idrostatico e un caso particolare di sistema termodinamico semplice.
Definizione 122 (Equilibrio termodinamico). Ferme restando le condizioni esterne, unsistema e in equilibrio termodinamico se non varia il proprio stato termodinamico.
Si suppone di far interagine tra loro due sistemi, per mezzo di una parete che neimpedisce l’interazione meccanica.
Definizione 123 (Parete diatermica). . Parete che consente tra i sistemi un’interazione ditipo termico. Dopo l’interazione, i due sistemi raggiungono un comune equilibrio termico.
Definizione 124 (Parete adiabatica). . Parete che isola termicamente i due sistemi, iquali permangono nei propri stati iniziali.
Definizione 125 (Trasformazione termodinamica). Successione di cambiamenti dellecoordinate termodinamiche di un sistema.
Perche un sistema non cambi stato termodinamico occorrono:
• equilibrio meccanico;
• equilibrio termico;
162 10 - Sistemi termodinamici

Fisica generale CC© BY:© $\© =©
• equilibrio chimico: massa, concentrazione e composizione del sistema devono rima-nere costanti nel tempo.
Definizione 126 (Temperatura). Due sistemi in equilibrio termico tra loro hanno la stessatemperatura.
Teorema 22 (Principio zero della termodinamica). Due sistemi, separatamente inequilibrio termico con un terzo sistema, sono in equilibrio termico tra loro.
Sulla base del Principio zero e possibile misurare la temperatura usando un sistemacampione (termometro) che presenta variazioni rilevanti di una sua proprieta quando emesso a contatto termico (separatamente) con sistemi aventi temperature diverse.
Definizione 127 (Caratteristica termometrica). Relazione funzionale tra la proprietascelta e la temperatura misurata.
Definizione 128 (Funzione termometrica). La temperatura e funzione di una proprietatermometrica (figura 10.2).
Figura 10.2: Funzione termometrica
Di solito come funzione termometrica si sceglie una relazione lineare:
• T = ax + b e una taratura con due stati del sistema facilmente riproducibili (duepunti fissi);
• T = ax e una taratura con uno stato del sistema facilmente riproducibile (un puntofisso).
Si verifica sperimentalmente che termometri diversi forniscono valori di temperatura di-versi, spesso anche in maniera inaccettabile.
I termometri che usano gas a volume costante come sostanza termometrica sono menodifformi di altri. La proprieta termometrica e la pressione del gas. Il termometro vienetarato mettendolo a contatto con una cella al punto triplo dell’acqua1. Alla pressione lettaviene fatto corrispondere il valore 273, 16 K. La temperatura per una generica pressione pe:
T = 273, 16 ·p
p3[K]
Si costruiscono diversi termometri con diversi gas, aggiustandone le masse per avere lostesso p3. Facendo tendere a zero le masse, e quindi le pressioni dei gas, le differenzetendono a zero.
Definizione 129 (Termometro a gas perfetto con scala di Avogadro). Ttgp = limp3→0
273, 16 ·p
p3[K].
Definizione 130 (Gas perfetto). Fluido ideale che esibisce in ogni condizione il compor-tamento che i gas reali mostrano soltanto in condizioni di estrema rarefazione.
Nel Sistema Internazionale, la temperatura e una grandezza fondamentale.
Definizione 131 (Kelvin [K]). Frazione1
273, 16della temperatura del gas perfetto del
punto triplo dell’acqua.
La scala Kelvin non assume mai valori negativi e ha la stessa spaziatura della scalaCelsius:
TC = TK − 273, 15 [C]
1T = 0, 01C, dove coesistono i tre stati fisici.
10.1 - Coordinate termodinamiche 163

Fisica generale CC© BY:© $\© =©
10.1.2 Trasformazioni termodinamiche
Le trasformazioni termodinamiche sono processi attraverso i quali un sistema termodina-mico passa da uno stato di equilibrio i (che non ha piu condizioni di equilibrio) a uno statodi equilibrio f ; nel frattempo, pero, alcune proprieta del sistema sono cambiate.
Definizione 132 (Trasformazione irreversibile). Non e possibile in alcun modo riportareil sistema allo stato iniziale senza lasciarne traccia nell’ambiente circostante.
Definizione 133 (Trasformazione reversibile). E possibile riportare il sistema allo statoiniziale, in modo che anche l’ambiente circostante torni al proprio stato originario.
Tutti i processi reali sono irreversibili. Perche una trasformazione sia reversibile(caso limite) occorre che:
1. la trasformazione sia quasi-statica;
2. durante la trasformazione non agiscano forze dissipative.
La seconda condizione e impossibile da realizzare, perche gli attriti non possono esserecompletamente eliminati.
Perche avvenga la trasformazione e necessario che si verifichi uno squilibrio:
meccanico: differenza di pressione fra il sistema e l’ambiente circostante;
termico: differenza di temperatura;
chimico: differenze di densita e concentrazione tra parti del sistema.
Definizione 134 (Trasformazione quasi-statica). Successione continua di stati di equili-brio, a meno di errori trascurabili.
In pratica: il sistema deve avere, istante per istante, una pressione che differesce di unaquantita infinitesima da quella dell’ambiente circostante, e una temperatura che differiscedi una quantita infinitesima da quella dei corpi con cui interagisce termicamente.
Definizione 135 (Piano di Clapeyron). Rappresentazione cartesiana (figura 10.3(a)) nellaquale ogni punto sul piano p− V corrisponde ad uno stato del sistema.
(a) Piano di Clapeyron (b) Trasformazione isoterma (c) Trasformazioni isocora, isobara,ciclica
Figura 10.3: Rappresentazione di trasformazioni su piano di Clapeyron
Trasformazioni importanti. Alcune importanti trasformazioni, facilmente identifica-bili sul piano di Clapeyron, sono:
• isocora: a volume costante (lavoro nullo, figura 10.3(c));
• isobara: a pressione costante (figura 10.3(c));
• isoterma: a temperatura costante (figura 10.3(b));
• adiabatica: sistema termicamente isolato;
• ciclica: lo stato finale e quello iniziale coincidono (figura 10.3(c)).
164 10 - Sistemi termodinamici

Fisica generale CC© BY:© $\© =©
Espansione adiabatica. Il volume aumenta, mentre pressione e temperatura diminui-scono. In assenza di forze esterne, il gas si espande molto velocemente e il pistone si muovedi moto accelerato. La pressione diminuisce dapprima vicino al pistone, poi si propaga nelresto del gas con velocita di propagazione del suono (onda di pressione: ' 330 m/s). Latrasformazione non e quasi-statica; perche lo sia, serve una forza esterna che contrasti lapressione: la forza risultante sul pistone deve essere nulla e il pistone si deve muovere conpiccola velocita.
Definizione 136 (Termostato (serbatoio di calore) (sorgente di calore a temperaturacostante)). Sistema che mantiene inalterata la propria temperatura anche se posto incontatto con un sistema a temperatura differente.
Compressione/espansione isoterma. Una parete deve essere diatermica e in contattocon un termostato.
Riscaldamento/raffreddamento isocoro. Si mette il sistema idealmente a contattocon una successione di termostati a temperatura crescente/decrescente, in modo che ladifferenza di temperatura sia trascurabile e la trasformazione quasi-statica.
10.2 Equazione di stato dei gas
Si verifica che in un sistema idrostatico di massa costante le tre coordinate macroscopichep, V, T non sono indipendenti.
Proprieta 10.1 (Equazione di stato del sistema idrostatico). f(p, V, T ) = 0.
Definizione 137 (Gas perfetto). Gas che ha i comportamenti al limiti comuni agli altri gasreali, ma a una temperatura molto maggiore di quella critica (sotto la quale si liquefanno)quando la loro pressione tende a zero.
Proprieta 10.2 (Legge di Boyle). pV = cost. quando T e costante.
Utilizzando t [C], T [K] e il coefficiente di dilatazione cubica β =1
273, 15[C−1] si
possono definire altre leggi importanti per i gas perfetti.
Proprieta 10.3 (Prima legge di Gay-Lussac (Legge di Charles)).
Vt = V0(1 + βt)VT = V0βT
Proprieta 10.4 (Seconda legge di Gay-Lussac).
pt = p0(1 + βt)pT = p0βT
Proprieta 10.5 (Prima legge di Avogadro). Una mole di qualsiasi sostanza contieneNA = 6, 02 · 1023 molecole (numero di Avogadro).
Proprieta 10.6 (Seconda legge di Avogadro). Volumi uguali di gas diversi, con stessatemperatura e pressione, contengono lo stesso numero di molecole (e quindi di moli).
Dalle leggi appena espresse di deduce:
• Boyle: V ∝ 1
p(n, T costanti);
• Charles: V ∝ T (n, p costanti);
• Avogadro: V ∝ n (p, T costanti).
⇒ p ·V = cost. ·n ·T
Proprieta 10.7 (Equazione di stato del gas perfetto). p ·V = n ·R ·T .
10.2 - Equazione di stato dei gas 165

Fisica generale CC© BY:© $\© =©
Definizione 138 (Costante universale dei gas). R = NA · k = 8, 3145
[J
mol · K
].
Definizione 139 (Costante di Boltzmann). k = 1, 38066 · 10−23
[J
K
].
Per i gas reali bisogna sviluppare al limite:
limp→0
pV = nRT
Infatti, il gas perfetto e un modello cui tende il comportamento dei gas reali quando sonoa bassa pressione2. Spesso si usa lo sviluppo del viriale:
pV
nRT= 1 +Bp+ C2p+ . . .
dove B,C, . . . sono i coefficienti del viriale.
Proprieta 10.8 (Equazione di van der Waals).
(p+ a
n2
V 2
)· (V − nb) = nRT .
• Ogni molecola e schematizzata come una sfera rigida che ha a disposizione il volumetotale V , meno il volume occupato dalle altre molecole (covolume). Se b e il covolumedi una mole di gas, con n moli il volume disponibile e V − nb, quindi modificandol’equazione di stato del gas perfetto:
p =nRT
V − nb
• La pressione interna e ridotta dall’attrazione verso l’interno delle molecole periferiche,da parte delle molecole interne. L’effetto e proporzionale al quadrato della densita:
p =nRT
V − nb− a( nV
)2
10.2.1 Lavoro termodinamico
Per lavoro termodinamico si intende:
• il lavoro fatto dal sistema sull’ambiente (lavoro positivo);
• il lavoro fatto dall’ambiente sul sistema (lavoro negativo).
Il lavoro termodinamico e un lavoro esterno, cioe non riguarda il lavoro compiuto negliscambi energetici tra le varie parti di un sistema (lavoro interno).
Figura 10.4: Lavoro termodinamico [3]
Come sistema di esempio si prende un gas dentro ad un recipiente cilindrico (figu-ra 10.4).
2Fino a p = 1 atm con l’approssimazione di gas perfetto si commette un errore relativo pari a circa lo0,1%.
166 10 - Sistemi termodinamici

Fisica generale CC© BY:© $\© =©
1. In equilibrio: pgas = pe = pambiente + pcoperchio.
2. Aumentando la temperatura del gas, l’aumento di pressione causa un’espansione cheesegue un lavoro. Il gas fa lavoro motore; le forze esterne ~F (e) fanno lavoro resistente.
3. Considerando il coperchio fermo nei due stati iniziale e finale di trasformazione delgas, la variazione di energia cinetica e nulla e, per il teorema delle forze vive, ancheil lavoro complessivo delle forze che agiscono sul coperchio e nullo:
δL+ ~F (e) · d~r = 0
δL = −~F (e) · d~r= pe ·A · dh= pe · dV lavoro esterno elementare
4. Isolando l’attrito3 delle forze esterne e scrivendone la pressione comeFaA
:
δL = (pe + pa) · dV in espansione
δL = −(pe − pa) · dV in compressione
5. Per uno spostamento finito, dal volume VA al volume VB :
LAB =
∫ VB
VA
pe dV lavoro esterno fatto dal sistema
• Se pe = cost. : LAB = pe(VB − VA).
• Se pe = 0: LAB = 0 (il sistema puo espandersi liberamente nel vuoto).
• Se pe ' p (trasformazione quasi-statica): LAB =
∫ VB
VA
p dV .
Figura 10.5: Lavoro termodinamico in trasformazioni quasi-statiche e in cicli termodinamici
Lavoro nei cicli termodinamici. I lavori nei cicli termodinamici (figura 10.5) non sononulli perche le forze associate alla pressione non sono macroscopicamente conservative,quindi δL non e un differenziale esatto.
Lavoro eseguito da un gas perfetto in trasformazioni quasi-statiche. Per unatrasformazione isobara:
LAB =
∫ VB
VA
p dV = p
∫ VB
VA
dV = p · (VA − VB)
Per una trasformazione isocora:
LAB =
∫ VB=VA
VA
p dV = 0
3Perche una trasformazione quasi-statica sia reversibile, l’attrito deve essere nullo: altrimenti, in unciclo di espansione-compressione, l’attrito lascia traccia sull’ambiente esterno con un lavoro esterno nonnullo.
10.2 - Equazione di stato dei gas 167

Fisica generale CC© BY:© $\© =©
Per una trasformazione isoterma:
LAB =
∫ VB
VA
p dV =
∫ VB
VA
nRT
VdV = nRT ln
VBVA
= nRT lnpApB
Definizione 140 (Trasformazione quasi-statica politropica). Trasformazione quasi-staticaper la quale rimane costante il rapporto:
p ·V α = cost. oppure piVαi = pfV
αf
Lavoro eseguito da un gas perfetto in trasformazioni politropiche. Per unatrasformazione politropica:
LAB =
∫ VB
VA
cost.
V αdV
=cost. ·V 1−α
B − cost. ·V 1−αA
1− α
=pBV
αB ·V 1−α
B − pAV αA ·V 1−αA
1− α
=pBVB − pAVA
1− α
10.3 Teoria cinetica dei gas perfetti (metodo statisti-co)
Le ipotesi di base del modello sono:
1. raggio d’azione tra le molecole trascurabile (moto rettilineo uniforme tra un urto el’altro);
2. urti con le pareti istantanei e completamente elastici (pareti lisce e di massa infinita);
3. volume delle molecole trascurabile rispetto a quello del contenitore.
Il modello si applica bene ai gas rarefatti (bassa pressione e temperatura elevata rispettoal punto di liquefazione) per i quali si possono trascurare le interazioni a distanza tramolecole.
Figura 10.6: Urto elastico di una molecola contro la parete di destra del cubo in analisi [3]
Si considera un cubetto di lato L contenente gas perfetto (figura 10.6).
v1 = v2 , v1j = v2j , v1k = v2k
Dopo l’urto e cambiata solo la componente lungo i (v1i = −v2i), quindi la quantita dimoto della particella i−esima varia di:
∆qi = −2mvxii
168 10 - Sistemi termodinamici

Fisica generale CC© BY:© $\© =©
Tra un urto e l’altro, la particella si muove di moto rettilineo uniforme. Nel tempo ∆t
ci sono N∆t =∆t2Lvxi
urti; ogni urto provoca un impulso contro la parete 2mvxi. Quindi
l’impulso scambiato in ∆t dalla particella e:
Ii = 2mvxi ·N∆t = mvxi2 ∆t
L
L’impulso totale scambiato in ∆t con una parete e la sommatoria dei contributi di tuttele particelle:
I =∑i
mvxi2 ∆t
L
L’impulso per unita di tempo (forza media esercitata dal gas sulla parete) e:
fx =m
L
∑i
vxi2
La pressione esercitata sulla parete allora vale:
p =fxL2
=m
V
∑i
vxi2 con V = L3
=mN
V·
(1
N
N∑i=1
vxi2
)
=mN
V· vx2
dove vx2 e il valore medio di vx2.
Analogamente, visto anche che la pressione e identica sulle varie pareti, si ha:
vx2 = vy2 = vz2 e v2 = vx2 + vy2 + vz2 = 3vx2
quindi:
p =mN
3Vv2 =
2
3
N
V
(1
2mv2
)︸ ︷︷ ︸
K
dove K e l’energia cinetica media.
Teorema 23. Per i gas perfetti, la temperatura e direttamente proporzionale all’energiacinetica media delle molecole.
Dimostrazione.pV = NkT
pV =2
3NK
⇒ 2
3K = kT ⇒ T =
2
3
K
k
Corollario 24 (Energia cinetica media di una molecola monoatomica). K =3
2kT .
Corollario 25 (Energia cinetica totale di un gas perfetto monoatomico). K =3
2nRT .
Corollario 26. L’energia interna di un gas perfetto dipende solo dalla temperatura.
10.3 - Teoria cinetica dei gas perfetti (metodo statistico) 169

Fisica generale CC© BY:© $\© =©
Teorema 27 (di equipartizione dell’energia). Schematizzando la molecola di un gascome un sistema meccanico qualunque, i termini di energia scambiata con le altre durante
gli urti hanno valore mediokT
2in condizione di equilibrio:
K = g ·kT
2, K = g ·
nRT
2
con g =
3 gradi di liberta per molecole monoatomiche5 gradi di liberta per molecole biatomiche6 gradi di liberta per molecole poliatomiche
.
10.3.1 Stati di aggregazione e punto triplo
Al di sotto di una certa temperatura critica (TC), caratteristica di ogni gas, l’effetto delleinterazioni e prevalentemente attrattivo: i gas possono cambiare stato di aggregazione,passando alle fasi liquida e/o solida.
Definizione 141 (Temperatura critica (TC)). Temperatura al di sopra della quale non cisono transizioni di fase.
Ad esempio, per l’acqua si ha TCH2O= 374 C.
Definizione 142 (Punto triplo). Stato al quale coesistono le tra fasi del sistema (figu-ra 10.7).
Ad esempio, per l’acqua si ha T3 = 273, 16 K = 0, 01 C alla pressione p3 = 611 Pa.
Figura 10.7: Diagramma temperatura-pressione e punto triplo per sostanza che, fondendo, si dilata [3]
170 10 - Sistemi termodinamici
CAPITOLO 11
Primo principio della termodinamica
L’energia totale di un sistema varia solo se esso non e isolato.
• Il lavoro delle forze esterne e esprimibile come variazione di energia interna mecca-nica: L(e) = ∆U .
• Teorema delle forze vive: LAB = TB − TA (variazione dell’energia cinetica).
• Teorema della conservazione dell’energia meccanica: E = T + V = cost. .
Un sistema non isolato termicamente interagisce con l’ambiente circostante per via termica,scambiando calore.
11.1 Energia interna
Si considera un sistema racchiuso tra pareti adiabatiche: puo avere solo interazioni mec-caniche con l’esterno. Tutte le trasformazioni del sistema sono adiabatiche: gli scambi dienergia avvengono attraverso lavoro termodinamico.
Ci si aspetta che in una trasformazione i → f il lavoro dipenda dai due stati i, f edal tipo di trasformazione. Sperimentalmente, si osserva che il lavoro dipende solo dai duestati i, f e non dal tipo di trasformazione.
Ladif = Ui − Uf = −(Uf − Ui) = −∆U
Definizione 143 (Energia interna). Funzione di stato termodinamico, definita a meno diuna costante, con un valore specifico per ogni stato; rappresenta il contenuto energeticodel sistema (grandezza estensiva):
U = U(p, V, T )
Se il sistema non scambia calore con l’esterno (perche e isolato), allora puo variare lapropria energia interna solo attraverso lavoro esterno.
11.1.1 Calore
Si considera un sistema non isolato termicamente.
Lif 6= Ladif , Lif dipende dalla trasformazione
Definizione 144 (Calore). Grandezza che dipende dalla trasformazione (non solo daglistati i e f). Ha le dimensioni di un’energia perche e l’energia scambiata attraverso le pareticonduttrici:
Q = Lif + ∆U
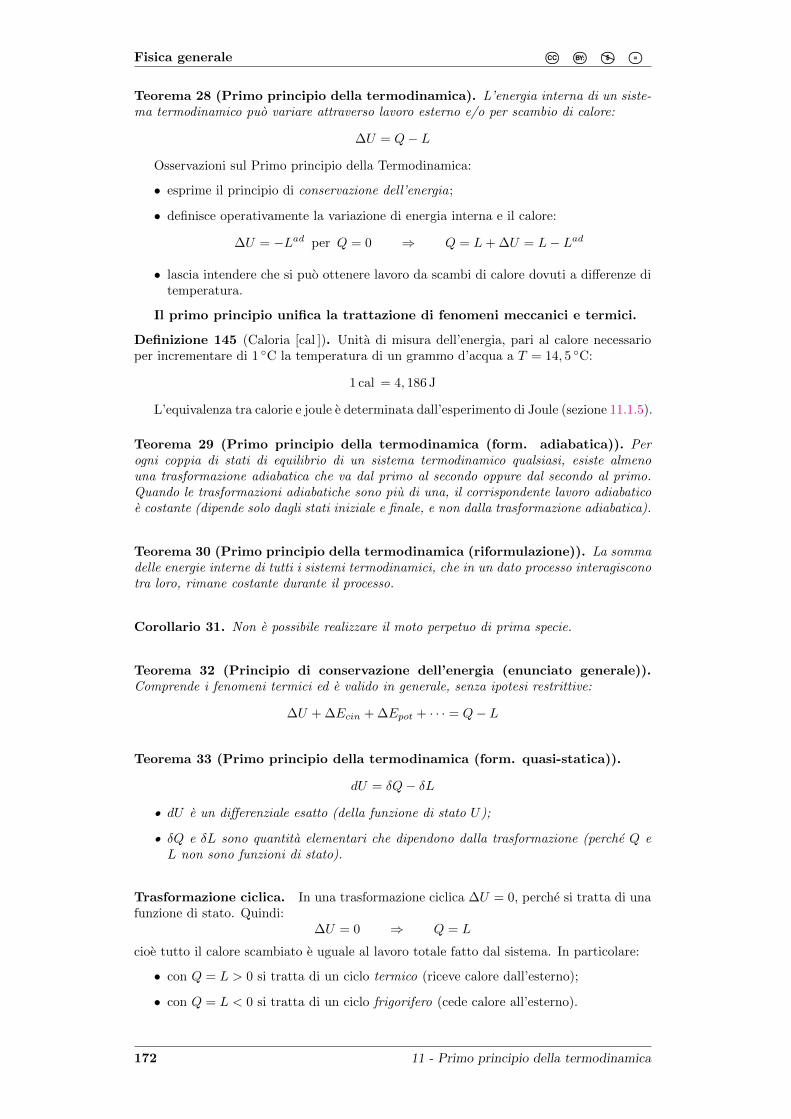
Fisica generale CC© BY:© $\© =©
Teorema 28 (Primo principio della termodinamica). L’energia interna di un siste-ma termodinamico puo variare attraverso lavoro esterno e/o per scambio di calore:
∆U = Q− L
Osservazioni sul Primo principio della Termodinamica:
• esprime il principio di conservazione dell’energia;
• definisce operativamente la variazione di energia interna e il calore:
∆U = −Lad per Q = 0 ⇒ Q = L+ ∆U = L− Lad
• lascia intendere che si puo ottenere lavoro da scambi di calore dovuti a differenze ditemperatura.
Il primo principio unifica la trattazione di fenomeni meccanici e termici.
Definizione 145 (Caloria [cal ]). Unita di misura dell’energia, pari al calore necessarioper incrementare di 1 C la temperatura di un grammo d’acqua a T = 14, 5 C:
1 cal = 4, 186 J
L’equivalenza tra calorie e joule e determinata dall’esperimento di Joule (sezione 11.1.5).
Teorema 29 (Primo principio della termodinamica (form. adiabatica)). Perogni coppia di stati di equilibrio di un sistema termodinamico qualsiasi, esiste almenouna trasformazione adiabatica che va dal primo al secondo oppure dal secondo al primo.Quando le trasformazioni adiabatiche sono piu di una, il corrispondente lavoro adiabaticoe costante (dipende solo dagli stati iniziale e finale, e non dalla trasformazione adiabatica).
Teorema 30 (Primo principio della termodinamica (riformulazione)). La sommadelle energie interne di tutti i sistemi termodinamici, che in un dato processo interagisconotra loro, rimane costante durante il processo.
Corollario 31. Non e possibile realizzare il moto perpetuo di prima specie.
Teorema 32 (Principio di conservazione dell’energia (enunciato generale)).Comprende i fenomeni termici ed e valido in generale, senza ipotesi restrittive:
∆U + ∆Ecin + ∆Epot + · · · = Q− L
Teorema 33 (Primo principio della termodinamica (form. quasi-statica)).
dU = δQ− δL
• dU e un differenziale esatto (della funzione di stato U);
• δQ e δL sono quantita elementari che dipendono dalla trasformazione (perche Q eL non sono funzioni di stato).
Trasformazione ciclica. In una trasformazione ciclica ∆U = 0, perche si tratta di unafunzione di stato. Quindi:
∆U = 0 ⇒ Q = L
cioe tutto il calore scambiato e uguale al lavoro totale fatto dal sistema. In particolare:
• con Q = L > 0 si tratta di un ciclo termico (riceve calore dall’esterno);
• con Q = L < 0 si tratta di un ciclo frigorifero (cede calore all’esterno).
172 11 - Primo principio della termodinamica

Fisica generale CC© BY:© $\© =©
Trasformazione a volume costante. Dato che δL = 0, si ha che:
δQ = dU e Q = ∆U
Definizione 146 (Entalpia). Funzione di stato che esprime la quantita di energia che unsistema puo scambiare con l’ambiente:
H = U + p ·V
Trasformazione a pressione costante. Dato che δL = pe · dV , si ha che:
δL = pe · dV= dH − dU= δQ− dU
⇒ δQ = dH
Q = ∆H
11.1.2 Trasmissione del calore
Termodinamicamente sono tre i metodi di trasmissione del calore tra sistemi:
1. conduzione: trasporto di calore senza movimento macroscopico di materia;
2. convezione: trasporto di calore attraverso il movimento di masse fluide (movimen-to generato dall’effetto di variazioni di temperatura, che provocano variazioni didensita);
3. irraggiamento: trasporto di calore attraverso onde elettromagnetiche.
Conduzione
Proprieta 11.1 (Legge di Fourier). Il flusso di energia e opposto al gradiente di tempe-ratura e proporzionale alla conducibilita termica (K), tipica del materiale:
δQ = −K dSdT
dxdt
Il segno meno indica che il calore va dalla faccia piu calda a quella piu fredda.
La conduzione e riconducibile alle vibrazioni reticolari e al trasferimento degli elet-troni di conduzione, quindi dipende dalla fase del materiale. Nei metalli conduttori laconduzione e spesso associata all’effetto termoelettrico.
Definizione 147 (Effetto termoelettrico). L’estremo di una barra metallica assume po-tenziale elettrico positivo quando e riscaldato, rispetto all’altro estremo.
Convezione
Proprieta 11.2 (Legge di Newton). Q = h ·A · (T − T∞) · ∆t, dove:
• A: area della superficie esposta al flusso;
• T : temperatura della superficie della lamina;
• T∞: temperatura a grande distanza;
• h: coefficiente dipendente dal fluido, dalla temperatura, dalla geometria.
11.1 - Energia interna 173

Fisica generale CC© BY:© $\© =©
Irraggiamento
Proprieta 11.3 (Legge di Stefan). Q = εσAT 4∆t, dove:
• ε: coefficiente dipendente dalla superficie radiante e dalla frequenza:
– ε ≤ 1 sempre;
– ε = 1 per un corpo nero, che assorbe tutta la radiazione;
• σ = (5, 67051± 0, 00019) · 10−8[Wm−2K−4
]: costante di Stefan-Boltzmann.
Definizione 148 (Parete adiabatica (def. operativa)). Una parete adiabatica impedisceil trasferimento di calore per conduzione (intercapedine vuota), per convezione (impedisceil passaggio di materia) e per irraggiamento (schermi contro onde elettromagnetiche).
11.1.3 Capacita termica e calore specifico
Generalmente, un corpo che scambia calore varia la propria temperatura.
Definizione 149 (Capacita termica media). Nell’intervallo ∆T : Cm = Q∆T .
Definizione 150 (Capacita termica). Grandezza estensiva, caratteristica del sistema.Alla temperatura T :
C(T ) =δQ
dT
Definizione 151 (Calore specifico). Grandezza intensiva, dipendente dalla sostanza dicui e costituito il sistema. Si tratta della capacita termica riferita all’unita di massa:
c =C
m=
1
m·δQ
dT
Definizione 152 (Calore molare). Grandezza intensiva, dipendente dalla sostanza di cuie costituito il sistema. Si tratta della capacita termica riferita all’unita molare:
c =C
n=
1
n·δQ
dT
Il calore specifico e quello molare dipendono:
• dalla sostanza;
• dal tipo di trasformazione che genera scambio di calore;
• dalla temperatura alla quale avviene la trasformazione.
Le grandezze appena viste descrivono la capacita di un sistema di scambiare calore senzavariare la propria temperatura. Un termostato, che scambia calore a temperatura costante,ha C =∞.
Con le definizioni di capacita termica e il Primo principio della termodinamica si puovalutare la temperatura di equilibrio di due sistemi (a temperature T1 e T2) che interagi-scono solo per via termica, senza scambiare lavoro o calore con l’ambiente. Si suppongonoC1 e C2 costanti e indipendenti dalla trasformazione.
Q = 0L = 0
∆U = Q− L = 0∆U = ∆U1 + ∆U2 = 0
⇒ ∆U1 = −∆U2
Q1 = ∆U1
Q2 = ∆U2
⇒ Q1 = −Q2
La relazione finale Q1 = −Q2 e logico perche lo scambio di calore avviene unicamente trai due corpi. Te e la temperatura di equilibrio: Q1 = C1(Te − T1)
Q2 = C2(Te − T2)Q1 = −Q2
⇒ Te =C1T1 + C2T2
C1 + C2=n1c1T1 + n2c2T2
n1c1 + n2c2
174 11 - Primo principio della termodinamica

Fisica generale CC© BY:© $\© =©
Quindi la temperatura di equilibrio e intermedia tra quelle iniziali ed e la media pesatadelle due: i pesi sono le capacita termiche.
Un sistema con capacita termica molto elevata rispetto all’altro puo essere schematiz-zato come un termostato perche:
Te = T1 ·1 +
C2T2
C1T1
1 +C2
C1
C1C2−→ T1
La relazione che determina Te vale anche quando i sistemi scambiano lavoro col restodell’ambiente.
Calori molari per sistemi idrostatici
Per i sistemi idrostatici si definiscono i calori molari a volume costante (cV ) e a pressionecostante (cp):
cV =1
n·(δQ
dT
)V
, cp =1
n·(δQ
dT
)p
Nota 11.1.1. Per trasformazioni quasi-statiche il Primo principio della termodinamica e dU = δQ− δL.Il lavoro elementare e δL = p dV . Il differenziale esatto dU e funzione delle derivate parziali rispetto acoppie di coordinate:
dU =
(∂ U
∂p
)V
dp+
(∂ U
∂V
)p
dV(∂ U
∂p
)T
dp+
(∂ U
∂T
)p
dT(∂ U
∂V
)T
dV +
(∂ U
∂T
)V
dT
(Il pedice delle derivate e la variabile costante durante la derivazione.)
δQ = dU + δL =
(∂ U
∂p
)V
dp+
[(∂ U
∂V
)p
+ p
]dV[(
∂ U
∂p
)T
+ p
(∂ V
∂p
)T
]dp+
[(∂ U
∂T
)p
+ p
(∂ V
∂T
)p
]dT[(
∂ U
∂V
)p
+ p
]dV +
(∂ U
∂T
)V
dT
Per il calore molare a volume costante:(δQ)V
=
(∂ U
∂T
)V
· dT ⇒ cV =1
n·(∂ U
∂T
)V
Per il calore molare a pressione costante:
(δQ)p
=
[(∂ U
∂T
)p
+ p ·(∂ V
∂T
)p
]· dT ⇒
cp =1
n·
[(∂ U
∂T
)p
+ p ·(∂ V
∂T
)p
]=
1
n·(∂ H
∂T
)p
Teorema 34. cp − cv ≥ 0 sempre.
11.1.4 Proprieta dei gas ideali
Energia interna
Proprieta 11.4 (Energia interna di un gas perfetto). L’energia interna di un gas perfettodipende solo dalla temperatura.
Joule ha studiato l’espansione libera (espansione in ambiente adiabatico, dove il gasnon fa lavoro). Si lascia passare parte di un gas da una camera in cui e racchiuso dentroun’altra dove c’era il vuoto:
11.1 - Energia interna 175

Fisica generale CC© BY:© $\© =©
• il processo e irreversibile (trasformazione non quasi-statica);
• il gas non fa lavoro perche la pressione esterna e nulla rispetto al gas;
• non c’e scambio di calore (contenitore adiabatico).Q = 0L = 0
∆U = Q− L = 0
Sperimentalmente, all’equilibrio, limp→0
∆T = 0. Pero ∆V 6= 0 (aumenta) e ∆p 6= 0
(diminuisce). U(Vf , T ) = U(Vi, T )U(pf , T ) = U(pi, T )
⇒ U = U(T )
Definizione 153 (Gas perfetto). Un gas e perfetto quando la propria energia interna efunzione della sola temperatura:
U = U(T )
Capacita termica
Dato che l’energia interna di un gas perfetto e funzione solo di T , in una trasformazione avolume costante si puo scrivere:
(δQ)V = dU = dUdT · dT
cV = 1n
(δQdT
)V
= 1n · dUdT
dU = n cV dT
Allora:dU︸︷︷︸
n cV dT
= δQ− δL︸︷︷︸p dV
Teorema 35 (Primo principio della termodinamica (form. per gas perfetti)).
δQ = n cV dT + p dV
Dalla formulazione del Primo principio si ottiene un’altra relazione analoga. Perottenere il termine p dV si differenzia l’equazione di stato pV = nRT :
pV = nRT ⇒ p dV + V dp = nRdT
δQ = n cV dT + (nRdT − V dp)
Si trova il calore molare a pressione costante:
cp =1
n·(δQ
dT
)p
(δQ)p = n cV dT + nRdT = n(cV +R) dT
⇒ cp =1
n·
1
dT·n(cV +R) dT
= cV +R
Proprieta 11.5 (Relazione di Mayer). cp = cV +R (valida solo per gas perfetti).
Anche nel caso di gas perfetti si ha cp > cV , cioe γ =cpcV
> 1 sempre.
Dato che dU = n cV dT vale: U = n cV T + cost. , con costante nulla per modellimicroscopici.
Per un gas perfetto, anche l’entalpia dipende solo dalla temperatura:
H = U + pV = U + nRT
176 11 - Primo principio della termodinamica

Fisica generale CC© BY:© $\© =©
cp =1
n·(δQ
dT
)p
=1
n·(dU
dT+ p
dV
dT
)=
1
n·d(U + pV )
dT
=1
n·dH
dTdH = n cp dT
Grazie alla relazione di Mayer e a quanto visto, si possono usare due espressioni del calorescambiato δQ:
δQ =
p dV = n cV dT
dH − V dp = n cp dT
Trasformazioni adiabatiche quasi-statiche
Non essendoci scambio di calore si ha δQ = 0, quindi:n cV dT = −p dVn cp dT = V dp
1
γ= − p
V
dV
dp⇒ dp
p= −γ dV
V
Si integra tra due stati, con γ =cpcV
costante:
lnp
p0= −γ ln
V
V0⇒ ln
pV γ
p0Vγ0
= 0
Proprieta 11.6 (Equazione di Poisson). Per trasformazioni adiabatiche di gas perfettivale:
pV γ = cost.
Esistono relazioni analoghe, ottenute dall’equazione di stato dei gas:
TV γ−1 = cost. , Tp1−γγ = cost.
Il lavoro adiabatico di un gas perfetto si puo ottenere scrivendo p =k
V γcon k = pAV
γA =
pBVγB :
LAB =
∫ VB
VA
p dV =
∫ VB
VA
kdV
V γ=
k
γ − 1
(V 1−γA − V 1−γ
B
)=
1
γ − 1
(pAV
γAV
1−γA − pBV γBV
1−γB
)=
pAVA − pBVBγ − 1
Questa relazione si puo utilizzare anche se la trasformazione adiabatica non e quasi-statica,perche per il Primo principio della termodinamica e sempre applicabile la relazione LAB =UA − UB = ncV (TA − TB).
Figura 11.1: Trasformazioni politropiche
11.1 - Energia interna 177

Fisica generale CC© BY:© $\© =©
Definizione 154 (Trasformazioni politropiche). Trasformazioni isoterme e adiabatiche(quasi-statiche) che passano per stati le cui coordinate termodinamiche soddisfano equa-zioni del tipo:
pV α = cost. (α ∈ R)
con (figura 11.1):
• α = 0: trasformazione isobara;
• α = 1: trasformazione isoterma;
• α > 1: trasformazione adiabatica (α = γ);
• α→∞: trasformazione isocora.
Proprieta 11.7 (Calore molare di un gas perfetto). In una trasformazione politropica:
cα = cV +R
1− α
Aspetti microscopici
Proprieta 11.8 (Energia cinetica di una molecola di gas perfetto). L’energia cineticamedia di una molecola monoatomica di gas perfetto e:
K =3
2kT
Proprieta 11.9 (Energia interna di un gas perfetto). L’energia interna e il numero dimolecole per K:
U =3
2nRT (per un gas monoatomico)
Teorema 36 (di equipartizione). In un sistema in equilibrio termodinamico alla tem-peratura T , ogni termine quadratico indipendente della sua energia interna ha valore medio1
2kT .
Conseguenza del teorema di equipartizione e che ogni molecola contribuisce all’energia
interna con un’energia ε =1
2kT per ogni grado di liberta.
Definizione 155 (Calore molare di un gas perfetto). Sulla base del teorema di equipar-tizione e possibile ridefinire i calori molari a volume e a pressione costanti:
cV =g
2R , cp =
g + 2
2R con g =
3 (monoatomico)5 (biatomico)6 (poliatomico)
gradi di liberta
11.1.5 Esperimento di Joule
Determina l’equivalenza 1 cal = 4, 186 J.
• Un mulinello e messo in movimento dalla caduta di due corpi di massa M per untratto h.
• Il lavoro L = 2Mgh della caduta aumenta la temperatura dell’acqua tramite ilmulinello; una parte compensa attriti e resistenza dell’aria (Lattr).
2Mgh+ Lattr = ∆U + 2
(1
2Mv2
)(bilancio energetico)
178 11 - Primo principio della termodinamica

Fisica generale CC© BY:© $\© =©
• Per misurare l’attrito si fa una misura complementare, determinando i valori di duemasse m che acquistano la stessa velocita v cadendo di h: per la conservazionedell’energia:
2mgh+ Lattr = 2
(1
2Mv2
)⇒ ∆U = (M −m) · (2gh− v2)
Se si trasferisce calore, allora Q = C · ∆T = ∆U , ottenendo gli stessi risultati.
• Con il calore misurato in calorie si ottiene l’equivalenza con i joule.
11.1 - Energia interna 179

Fisica generale CC© BY:© $\© =©
180 11 - Primo principio della termodinamica

CAPITOLO 12
Secondo principio della termodinamica
Il Primo principio della Termodinamica stabilisce l’impossibilita che avvengano trasfor-mazioni in contrasto con la conservazione dell’energia. Molti processi, pur compatibili colPrincipio, in natura non avvengono mai oppure sono altamente improbabili. In genera-le, i processi avvengono con un verso privilegiato perche sono processi reali e, dunque,irreversibili.
Un processo reversibile richiede che:
1. la trasformazione sia quasi-statica;
2. durante la trasformazione non agiscano forze dissipative.
Ad esempio, l’espansione isoterma quasi-statica di un gas perfetto, in assenza di attrito, eun processo reversibile. Poiche ∆U = 0, si ha che Q = L cioe tutto il calore scambiato etrasformato in lavoro.
In generale, non potendo avere situazioni ideali, si ha sempre che Q = L ≥ 0.
Teorema 37 (Enunciato di Kelvin-Planck). E impossibile realizzare una qualsiasitrasformazione il cui unico risultato sia quello di convertire completamente in lavoro ilcontenuto di calore prelevato da un solo serbatoio.
Definizione 156 (Macchina termica). Macchina la cui variazione di energia internadurante un ciclo e nulla (∆U = 0), quindi Q = L per ogni ciclo.
(a) Macchina mono-terma (non realizza-bile)
(b) Macchina termica(realizzabile)
Figura 12.1: Macchine termiche

Fisica generale CC© BY:© $\© =©
La macchina monoterma (figura 12.1(a)) non puo trasformare tutta l’energia in lavoroperche una parte e trasferita, come calore, ad un altro termostato piu freddo. Una macchi-na termica, per funzionare, ha bisogno di almeno due serbatoi di calore (figura 12.1(b)).Ad ogni ciclo, M assorbe calore Q1 dal serbatoio caldo T1 e cede calore Q2 al serbatoiofreddo T2. Il sistema e la macchina termica:
Q1 +Q2 = L ⇒ |Q1| − |Q2| = L
Definizione 157 (Rendimento). Rapporto tra il lavoro compiuto L e il corrispondentecalore utilizzato (prelevato dall’ambiente) Q1:
η =L
Q1=Q1 +Q2
Q1= 1 +
Q2
Q1= 1− |Q2|
|Q1|≤ 1
In realta, l’obiettivo massimo η = 1 e impossibile per il Secondo principio dellaTermodinamica.
Teorema 38 (Enunciato di Clausius per macchine frigorifere). E impossibile rea-lizzare una qualsiasi trasformazione il cui unico risultato sia quello di far passare caloreda un corpo piu freddo a un corpo piu caldo.
(a) Macchina frigo-rifera ideale (nonrealizzabile)
(b) Macchina frigorife-ra
Figura 12.2: Macchine frigorifere
Il frigorifero puo trasferire calore tra i due serbatoi solo se usufruisce di lavoro esterno(figura 12.2(b)). Il lavoro della macchina frigorifera e negativo.
Definizione 158 (Coefficiente di prestazione). Rapporto tra il calore utilizzato (cedutoall’ambiente dal frigorifero) Q1 e il corrispondente lavoro compiuto L :
ω =|Q2|L
> 1
Teorema 39. Gli enunciati di Kelvin-Planck e di Clausius sono equivalenti.
Dimostrazione per assurdo (1). Se non valesse l’enunciato di Kelvin-Planck, sipotrebbe costruire una macchina termica che converte completamente in lavoroil calore Q1 di un serbatoio T1. Gli si affianca, allora, un frigorifero che usa illavoro per funzionare tra T1 e T2 < T1 (figura 12.3(a)).
Bilancio energetico: a ogni ciclo, la macchina composta trasferisce calore dalserbatoio freddo a quello caldo, senza usare calore esterno (LM e lavoro inter-no). Questo contraddice l’enunciato di Clausius.
Dimostrazione per assurdo (2). Se non valesse l’enunciato di Clausius, si po-trebbe costruire una macchina frigorifera che trasferisce calore dal serbatoiofreddo T2 al serbatoio caldo T1 senza lavoro esterno. Gli si affianca, allora,
182 12 - Secondo principio della termodinamica
Fisica generale CC© BY:© $\© =©
una macchina termica che preleva dal serbatoio caldo T1 il calore cedutogli dalfrigorifero (figura 12.3(b)).
Bilancio energetico: a ogni ciclo, la macchina composta usa il calore scam-biato con un solo serbatoio convertendolo completamente in lavoro. Questocontraddice l’enunciato di Kelvin-Planck.
(a) (b)
Figura 12.3: Dimostrazione dell’equivalenza degli enunciati di Kelvin-Planck e di Clausius [3]
12.1 Macchine reversibili. Ciclo di Carnot
Ci si aspetta che, a parita di tutte le altre condizioni, il rendimento delle macchine reversibi-li sia superiore a quello delle macchine non reversibili (per l’assenza di effetti dissipativi).Esiste un solo tipo di ciclo reversibile per macchine che lavorano con due soli serbatoi.Le uniche trasformazioni reversibili sono isoterme e adiabatiche, quindi il ciclo si ottienealternandole.
Definizione 159 (Macchina di Carnot). Macchina termica reversibile, funzionante condue soli serbatoi.
Definizione 160 (Ciclo di Carnot). Ciclo termodinamico reversibile ottenuto dall’alter-nanza di due trasformazioni isoterme (A → B e C → D) e due adiabatiche (B → C eD → A, figura 12.4).
12.1.1 Rendimento della macchina di Carnot
Teorema 40 (di Carnot). Il rendimento di una macchina termica generica non puoessere maggiore di quello di una macchina reversibile di Carnot.
Dimostrazione. Una macchina generica M e una di Carnot C lavorano tra duesorgenti T1 > T2. Entrambe scambiano Q con T1 (figura 12.5(a)).
Invertendo il senso di funzionamento di C, tutte le energie in gioco cambianodi segno: la macchina frigorifera C scambia −Q con T1 e compie lavoro −LC(figura 12.5(b)).
12.1 - Macchine reversibili. Ciclo di Carnot 183

Fisica generale CC© BY:© $\© =©
Figura 12.4: Ciclo di Carnot
In un ciclo, le macchine M e C compiono L = LM − LC senza scambiarecalore con T1 (monoterme, figura 12.5(c)). Allora, anche per l’enunciato diKelvin-Planck:
L ≤ 0 ⇒ LM ≤ LCCoi rendimenti:
ηM =LMQ
, ηC =LCQ
⇒ ηM ≤ ηC
(a)
⇒(b)
⇒(c)
Figura 12.5: Dimostrazione del teorema di Carnot [3]
Si ha ηM = ηC sono se la macchina M e reversibile (cioe di Carnot).
Proprieta 12.1. Tutte le macchine di Carnot che lavorano tra le stesse due sorgentihanno lo stesso rendimento.
Si calcola il rendimento di una macchina di Carnot nel caso in cui il fluido sia un gasperfetto, perche il rendimento non dipende dalla sostanza con cui lavora. Si considera,allora, una mole di gas per calcolare i calori Q1 e Q2 scambiati coi serbatoi.
A→ B (isotermica): ∆UAB = 0 (non cambia l’energia interna)
Q1 = LAB =
∫ B
A
p dV =
∫ B
A
RT
VdV = RT1 ln
VBVA
> 0
C → D (isotermica): ∆UCD = 0 (non cambia l’energia interna)
Q2 = LCD =
∫ D
C
p dV =
∫ D
C
RT
VdV = RT2 ln
VDVC
= −RT2 lnVCVD
< 0
B → C e D → A (adiabatiche):T1VB
γ−1 = T2VCγ−1
T1VAγ−1 = T2VD
γ−1 (equazioni di Poisson)
(VBVA
)γ−1
=
(VCVD
)γ−1
⇒ VBVA
=VCVD
184 12 - Secondo principio della termodinamica

Fisica generale CC© BY:© $\© =©
In definitiva:
|Q2||Q1|
=RT2
ln VCVD
RT1ln VBVA
=T2
T1⇒ ηC = 1− |Q2|
|Q1|= 1− T2
T1
che vale per ogni macchina reversibile, funzionante tra due serbatoi T1 e T2, con un fluidoqualsiasi (non e indispensabile che sia gas perfetto). Non potendo avere un serbatoio contemperatura T = 0 K (per annullare T1), non e mai possibile raggiungere ηC = 1.
In maniera del tutto analoga e possibile scrivere, per un frigorifero di Carnot:
ωC =|Q2|
|Q1| − |Q2|=
T2
T1 − T2
Si puo paragonare il rendimento di una macchina generica col rendimento di una macchinadi Carnot:
η ≤ ηC
1 +Q2
Q1≤ 1− T2
T1
Q2
Q1+T2
T1≤ 0
Q1
T1+Q2
T2≤ 0
Definizione 161 (Rendimento di una macchina che opera con piu di due serbatoi). η =LTOTQTOT
, dove QTOT e la somma di tutti i calori assorbiti dalla macchina durante il ciclo.
12.1.2 Temperatura termodinamica assoluta
La scala di temperatura assoluta puo essere definita sfruttando le proprieta della mac-china di Carnot. Il calore scambiato da una macchina reversibile e una buona proprieta
termometrica
(|Q2||Q1|
=T2
T1
)perche e indipendente dal fluido.
Definizione 162 (Temperatura assoluta). Tx = T3 ·|Qx||Q3|
= 273, 16 ·|Qx||Q3|
[K].
Definizione 163 (Zero assoluto (definizione di Kelvin)). Temperatura (irraggiungibile)di un serbatoio freddo al quale una macchina di Carnot non cederebbe calore.
Teorema 41 (Terzo principio della termodinamica). Lo zero assoluto non e rag-giungibile con un numero finito di trasformazioni.
12.1.3 Cicli particolari
Definizione 164 (Ciclo di Stirling). Ciclo termodinamico reversibile costituito da dueisoterme (A→ B e C → D) e due isocore (B → C e D → A), eseguite da un gas perfetto(figura 12.6(a)).
Definizione 165 (Ciclo di Otto). Ciclo termodinamico reversibile costituito da dueadiabatiche (A→ B e C → D) e due isocore (B → C e D → A, figura 12.6(b)).
Il lavoro del ciclo Otto, nel caso specifico di un gas perfetto, e uguale al calore scambiatocon l’esterno:
Lotto = Q = QDA +QBC = ncV (TA − TD) + ncV (TC − TB)
12.1 - Macchine reversibili. Ciclo di Carnot 185

Fisica generale CC© BY:© $\© =©
(a) Ciclo di Stirling [3] (b) Ciclo di Otto (c) Ciclo di Diesel
Figura 12.6: Cicli termodinamici particolari
La macchina riceve il calore QDA, quindi:
ηotto =L
QDA= 1− TB − TC
TA − TD
Il volume minimo e V1 = VA = VD, mentre il volume massimo e V2 = VB = VC . Dalleequazioni delle adiabatiche si ottiene una riscrittura del rendimento:
TAV1γ−1 = TBV2
γ−1 , TDV1γ−1 = TCV2
γ−1
⇒ TB − TCTA − TD
=
(V1
V2
)γ−1
=TBTA
=TCTD
⇒ η = 1− TBTA
< ηC
perche TA e la temperatura massima raggiunta, ma TB non e la temperatura minima.
Definizione 166 (Rapporto di compressione). r =V2
V1.
Definizione 167 (Ciclo di Diesel). Ciclo termodinamico reversibile costituito da due adia-batiche (B → C e D → A), una isobara (A→ B) e una isocora (C → D, figura 12.6(c)).
Il lavoro del ciclo Diesel, nel caso di un gas perfetto, e:
Ldiesel = QAB +QCD = ncp(TB − TA) + ncV (TD − TC)
La macchina riceve il calore QAB , quindi:
ηdiesel =L
QAB= 1− cV
cp
TC − TDTB − TA
12.1.4 Teorema di Clausius
Si generalizza la relazioneQ1
T1+Q2
T2≤ 0 nel caso di una macchina termica che scambia
calore con n serbatoi in un ciclo.
• Si considerano n macchine di Carnot, n serbatoi T1, T2, . . . , Ti, . . . , Tn e 1 sorgenteT0 > Ti (figura 12.7(a)).
• A ogni ciclo, Ci scambia con Ti il calore −Qi.
• A ogni ciclo, M scambia con Ti il calore Qi.
• Nel complesso, i Ti sono superflui perche la macchina e monoterma e funziona solo
con T0, scambiando Q′T =∑
Q′i (figura 12.7(b)).
186 12 - Secondo principio della termodinamica

Fisica generale CC© BY:© $\© =©
(a)
⇒(b)
Figura 12.7: Teorema di Clausius
• Q′T ≤ 0 (per l’enunciato di Kelvin-Planck).
• Per ogni macchina di Carnot:
Q′iT0
+(−Qi)Ti
= 0 ⇒ Q′i = T0QiTi
⇒ Q′T =∑
Q′i
= T0 ·∑ Qi
Ti≤ 0
⇒∑ Qi
Tiperche T0 > 0
Se la macchina e reversibile, vale l’uguaglianza.
Teorema 42 (Disuguaglianza di Clausius). In un ciclo durante il quale un sistema
termodinamico scambia calore con n termostati, la somma algebrica dei rapportiQiTi
non
e mai positiva (si annulla solo in caso di macchina reversibile):
n∑i=1
QiTi≤ 0
Per estensione di concetto, se nella trasformazione ciclica la temperatura varia concontinuita si integra invece di sommare:∮
δQ
T≤ 0
12.2 Entropia
La disuguaglianza di Clausius
∮δQ
T≤ 0 diventa
∮R
δQ
T= 0 nel caso di cicli reversibili.
Considerando due stati generici i, f e suddividendo il ciclo reversibile in due trasformazionireversibili: ∮ f
iR1
δQ
T+
∮ i
fR2
δQ
T= 0 ⇒
∫ f
iR1
δQ
T=
∫ f
iR2
δQ
T
Quindi l’integrale
∮ f
iR
δQ
Te indipendente dalla trasformazione reversibile R sulla quale e
calcolato.
12.2 - Entropia 187

Fisica generale CC© BY:© $\© =©
Definizione 168 (Entropia). Funzione di stato definibile come:
∆S =
∮ f
iR
δQ
T=
∫ f
i
dS = Sf − Si
L’indipendenza dalla trasformazione permette a ∆S di essere funzione di stato; inoltre,
dS =
(δQ
T
)R
e un differenziale esatto.
Teorema 43 (Integrali di Clausius). Se il ciclo puo essere suddiviso in una trasfor-mazione reversibile ed una irreversibile, vale la relazione:
∆S =
∫ f
iR
δQ
T>
∫ f
iI
δQ
T
Metodo per scoprire se una trasformazione e reversibile.
1. Si calcola l’integrale di Clausius lungo la trasformazione in esame (T e la temperaturadei termostati coi quali si scambia il calore δQ).
2. Si calcola ∆S con l’integrale di Clausius lungo una trasformazione sicuramentereversibile.
3. Si confrontano i due risultati: se sono uguali la trasformazione e reversibile, altrimentie irreversibile.
Proprieta 12.2 (Principio di aumento dell’entropia). L’entropia di un sistema isolatotermicamente aumenta se esso esegue una trasformazione irreversibile, altrimenti restacostante:
∆S ≥ 0
Dimostrazione. In un sistema isolato termicamente δQ = 0, quindi:
∆S ≥∫ f
i
δQ
T= 0
La variazione di entropia di un sistema isolato misura il grado di irreversibilita delletrasformazioni avvenute al suo interno.
Esempio: espansione libera (adiabatica) di un gas perfetto.
• Il processo non e reversibile (espansione libera), quindi il calcolo di ∆S non puoessere effettuato lungo la trasformazione realmente avvenuta (varrebbe 0).
• Dato che in questo caso, durante l’espansione, la temperatura rimane costante, sipuo usare una trasformazione isotermica reversibile:
dT = 0 ⇒dU = 0
δQ = p dV = nRTdV
V
∆S =
∫ f
iRisot
δQ
T= nR
∫ f
iR
dV
V= nR ln
VfVi
> 0
188 12 - Secondo principio della termodinamica

Fisica generale CC© BY:© $\© =©
Figura 12.8: Flusso di calore (spontaneo) tra due termostati
Esempio: passaggio di calore (spontaneo) tra due termostati.
• Il conduttore di collegamento C (figura 12.8) non cambia stato termodinamico.
• Il serbatoio caldo T1 cede il calore −|Q|. Se ne calcola ∆S lungo una trasformazionereversibile (isoterma):
∆S1 =
∫ f
iRisot
δQ
T=
1
T1
∫ f
iR
δQ = −|Q|T1
• Il serbatoio freddo T2 acquista calore |Q|, quindi analogamente:
∆S2 =|Q|T2
• Il corpo C non cambia stato, quindi ∆SC = 0.
• Anche se le singole ∆S possono essere negative, considerando l’intero sistema isolatotermicamente si ha:
∆S = ∆S1 + ∆S2 = −|Q|T1
+|Q|T2
> 0 con T1 > T2
˝ < 0 con T1 = T2
Proprieta 12.3 (Principio di aumento dell’entropia (2)). Ogni fenomeno fisico contri-buisce a far aumentare l’entropia di tutti i corpi che partecipano al fenomeno. La som-ma rimane costante solo nel caso (ideale) in cui tutte le trasformazioni coinvolte sianoreversibili.
La variazione di entropia dell’universo e la somma delle variazioni di entropia cor-rispondenti alle sole trasformazioni irreversibili: ogni contributo e, poi, somma dellecorrispondenti variazioni di entropia di sistema e ambiente.
In una trasformazione ciclica, la variazione di entropia dell’universo e solo la variazionedi entropia dell’ambiente sull’intero ciclo: il sistema non cambia entropia, perche essa efunzione di stato.
Teorema 44 (Secondo principio della termodinamica (form. entropica)). Non epossibile diminuire l’entropia dell’universo a seguito di una trasformazione termodinamica:
∆SU ≥ 0
La formulazione matematica-entropica del Secondo principio della termodinamica per-mette di prevedere l’evoluzione di un sistema isolato termicamente, che avviene in modoche il sistema si avvicini al massimo valore di entropia.
12.2.1 Rendimento
Il teorema di Carnot puo essere ottenuto a partire dal principio di aumento dell’entropia,invece di usare l’enunciato di Kelvin-Planck.
12.2 - Entropia 189

Fisica generale CC© BY:© $\© =©
Figura 12.9: Macchina termica e rendimento
Una macchina termica qualsiasi (figura 12.9) assorbe Q > 0 da un serbatoio caldo T1,compie il lavoro L e cede L−Q < 0 al serbatoio freddo T2. Per ogni ciclo, ∆SU coincidecon quella delle due sorgenti (i calori sono negativi perche valutati rispetto ai serbatoi):
∆SU = ∆S1 + ∆S2
=−QT1
+−(L−Q)
T2
=Q− LT2
− Q
T1
= Q ·(
1
T2− 1
T1
)− L
T2
L = Q ·(
1− T2
T1
)− T2 · ∆SU
Allora:
η =L
Q= 1 −T2
T1︸︷︷︸eff. Carnot
−T2
Q· ∆SU︸ ︷︷ ︸
eff. Clausius
< 1
Se la macchina e reversibile (cioe di Carnot), si ha ∆SU = 0 e si ottiene l’espressione
η = ηC = 1− T2
T1gia vista in precedenza.
Si nota ancora che il rendimento della macchina irreversibile e inferiore a quello dellamacchina di Carnot (di un termine pari all’effetto Clausius).
Teorema 45. Ogni macchina termica che lavori tra due serbatoi ha rendimento inferiorea 1.
12.2.2 Degrado dell’energia
La traccia di trasformazioni irreversibili avvenute resta nell’ambiente circostante, percheaumenta l’entropia. A ogni trasformazione irreversibile avvenuta corrisponde il fatto cheuna parte dell’energia disponibile si degrada e non e piu convertibile in lavoro.
∆LMAX = LMAX − L = T0 · ∆SU
dove T0 e la temperatura del termostato piu freddo a disposizione.Ogni trasformazione naturale (dunque irreversibile) comporta una parziale trasforma-
zione di energia meccanica in energia interna, che non potra piu essere riconvertita inlavoro. L’energia disponibile nell’universo progressivamente si degrada.
12.2.3 Entropia come coordinata termodinamica nei sistemi idro-statici
L’entropia puo essere usata come coordinata termodinamica perche e funzione di stato. Neisistemi idrostatici, gli stati di equilibrio possono essere individuati da coppie di coordinate(S, T ) oppure (S, V ), . . . .
190 12 - Secondo principio della termodinamica

Fisica generale CC© BY:© $\© =©
Per la definizione di entropia:
δQR = T dS ⇒ QR =
∫ i
fR
T dS
In un piano entropia-temperatura [S, T ] che riporta una trasformazione reversibile, l’areasottesa dalla curva e il calore scambiato nella trasformazione (figura 12.10(a)).
(a) Calore scambiato (b) Ciclo di Carnot
Figura 12.10: Rappresentazione di trasformazioni su piano [S, T ]
Si nota subito che:
δQR = 0 ⇐⇒ dS = 0
cioe una trasformazione adiabatica reversibile e anche isoentropica. Si rappresenta con unsegmento verticale nel piano [S, T ].
Il ciclo di Carnot sul piano [S, T ] e un rettangolo (figura 12.10(b)), la cui area e ilcalore totale scambiato nel ciclo, dunque e anche il lavoro eseguito dalla macchina.
Si puo scrivere la variazione di energia interna come:
dU = δQR − δL = T dS − p dV
dove S e V sono le variabili naturali mediante le quali e conveniente esprimere l’energiainterna. Spesso si scrive:
T dS = p dV + dU
Inoltre, si trovano le relazioni per temperatura e pressione:
T =
(∂U
∂S
)V
, p = −(∂U
∂V
)S
Si puo esprimere anche la variazione di entropia nel caso di isobare e isocore reversibili:
CV =
(δQRdT
)V
= T ·(dS
dT
)V
Cp =
(δQRdT
)p
= T ·(dS
dT
)p
⇒
dS = CV ·
dT
Tisocora reversibile
dS = Cp ·dT
Tisobara reversibile
∆S =
∫ f
i
CV ·dT
Tisocora reversibile
∆S =
∫ f
i
Cp ·dT
Tisobara reversibile
Nel caso di un gas perfetto si puo esprimere ∆S in termini di coordinate macroscopiche:
δQR = ncV dT + p dV = ncp dT − V dp
dS =δQRT
= ncvdT
T+p
TdV = ncp
dT
T− V
Tdp
∆S =
∫ f
i
δQRT
= ncv lnTfTi
+ nR lnVfVi
= ncp lnTfTi− nR ln
pfpi
12.2 - Entropia 191

Fisica generale CC© BY:© $\© =©
Utilizzando le precedenti relazioni e la relazione di Mayer tra i calori specifici, si unifica:
∆S = ncV lnTf V
γ−1f
Ti Vγ−1i
= ncV lnpf V
γf
pi Vγi
= ncp lnTf p
1γ−1
f
Ti p1γ−1
i
Teorema 46. Se le coordinate degli stati iniziale e finale soddisfano le equazioni di PoissonpV γ = cost. , allora ∆S = 0.
12.2.4 Energia libera
L’entropia e una grandezza che permette di prevedere il verso in cui avviene l’evoluzione diun sistema isolato, inizialmente squilibrato. Ci si chiede ora se sia possibile fare previsionianaloghe quando il sistema interagisce con l’ambiente circostante.
Si suppone un sistema con volume costante che puo scambiare calore con un termostatoesterno T0.
• Il sistema non puo scambiare energia meccanica con l’ambiente.
• Il sistema complessivo (sistema + termostato) e isolato termicamente.
Il termostato compie una trasformazione isotermica a temperatura T0:
dU = T dS − p dV = T0 dS ⇒ ∆Sterm =∆UtermT0
Per il principio di aumento dell’entropia:
∆SU = ∆Ssist +∆UtermT0
≥ 0
Il sistema e isolato, quindi ha energia interna costante: ∆Usist + ∆Uterm = 0. Quindi:
∆SU = ∆Ssist −∆UsistT0
≥ 0 ⇒ ∆Usist − T0 · ∆Ssist︸ ︷︷ ︸∆F
≤ 0
Definizione 169 (Energia libera di Helmholtz). Funzione di stato definita come:
F = U − T ·S
Teorema 47 (Secondo principio della termodinamica (form. quantitativa diHelmholtz)). Un sistema non isolato termicamente, a volume costante, evolve in mododa minimizzare l’energia libera di Helmholtz:
∆F ≤ 0
Definizione 170 (Energia libera di Gibbs). Funzione di stato definita come:
G = U − T ·S + p ·V= H − T ·S
Teorema 48 (Secondo principio della termodinamica (form. quantitativa diGibbs)). Un sistema che interagisce anche meccanicamente con l’ambiente, a temperaturae pressione costanti, evolve in modo da minimizzare l’energia libera di Gibbs:
∆G ≤ 0
192 12 - Secondo principio della termodinamica

Fisica generale CC© BY:© $\© =©
12.2.5 Entropia e probabilita
Si possono attribuire diversi significati allo stato di un sistema, a seconda del punto divista:
dinamica: lo stato e noto quando sono noti gli stati dinamici dei singoli componenti delsistema (equazioni vettoriali del moto) cioe i microstati ;
termodinamica: lo stato e individuato dai valori di alcune variabili macroscopiche, cioemacrostati.
A ogni macrostato possono corrispondere tanti microstati diversi.
Definizione 171 (Meccanica statistica). Valuta il numero wi di microstati diversi corri-spondenti allo stesso i−esimo macrostato termodinamico.
Esiste una relazione fra l’entropia di un certo stato e il numero wi di microstati diquello stato. L’evoluzione spontanea di un sistema isolato verso stati di maggior en-tropia corrisponde alla sua tendenza a portarsi nello stato che ha la maggior probabilitatermodinamica.
Definizione 172 (Stato di equilibrio). Macrostato al quale e associato il maggior numerodi microstati, cioe il piu probabile che si verifichi.
Proprieta 12.4 (Relazione di Boltzmann). La situazione di equilibrio in cui il siste-ma si trova alla fine della trasformazione spontanea e caratterizzata dal massimo valoredell’entropia, compatibile con la sua energia:
S = k · lnw =R
NAlnw
dove k =R
NAe la costante di Boltzmann.
A un maggior numero di microstati si fa corrispondere il concetto di maggior disordine.
Teorema 49 (Terzo principio della termodinamica (form. statistica)). L’entropiaassoluta di un solido cristallino allo zero assoluto e 0 (per la relazione di Boltzmann).
Definizione 173 (Entropia). Misura (logaritmica) del numero di stati accessibili al siste-ma, cioe del disordine:
S = k · lnw
Definizione 174 (Entropia). In un sistema isolato, l’entropia valuta quanto esso siadistante dallo stato piu probabile, cioe dall’equilibrio termodinamico.
12.2 - Entropia 193

Fisica generale CC© BY:© $\© =©
194 12 - Secondo principio della termodinamica
Elenco delle figure
1.1 Prodotto vettoriale (~a×~b) e regola della mano destra . . . . . . . . . . . . 12
1.2 Doppio prodotto misto (~a×~b ·~c) . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1 Velocita areolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2 Moto circolare uniforme [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Vincolo di un punto materiale su una linea e attrito radente . . . . . . . . . 273.2 Rotolamento puro (senza strisciamento) [1] . . . . . . . . . . . . . . . . . . 283.3 Coni di attrito statico (a sinistra) e dinamico (a destra) [1] . . . . . . . . . 293.4 Punto materiale vincolato a scorrere senza attrito lungo una guida rettilinea [1] 303.5 Punto materiale appoggiato con attrito su una superficie sferica [1] . . . . . 313.6 Asta rigida con estremo fissato mediante cerniera sferica ideale [1] . . . . . 313.7 Sportello rettangolare con asse di rotazione non perfettamente verticale [1] . 323.8 Problema statico con rotolamento puro [1] . . . . . . . . . . . . . . . . . . . 33
4.1 Orbita ellittica [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.2 Esperimento di Cavendish . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.3 Forza peso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.4 Forza elastica [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.5 Resistenza viscosa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.6 Resistenza idraulica [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.7 Piano inclinato (senza attrito) . . . . . . . . . . . . . . . . . . . . . . . . . . 464.8 Pendolo semplice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.9 SdR che trasla rispetto a un SdR inerziale . . . . . . . . . . . . . . . . . . . 514.10 SdR che ruota rispetto a un SdR inerziale . . . . . . . . . . . . . . . . . . . 524.11 Dipendenza di g dalla latitudine [1] . . . . . . . . . . . . . . . . . . . . . . . 534.12 Pendolo di Foucault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.13 Deviazione dei moti nell’emisfero settentrionale della Terra . . . . . . . . . 544.14 Urto di un pallone contro un muro . . . . . . . . . . . . . . . . . . . . . . . 584.15 Urto colineare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.16 Determinazione del centro di massa . . . . . . . . . . . . . . . . . . . . . . . 614.17 Pendolo composto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.18 Pendolo di Kater . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.19 Rotolamento puro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674.20 Carrucola mobile [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.21 Apparecchio di Fletcher [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.22 Apparecchio di Atwood [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.23 Ingranaggio [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.1 Lavoro di una molla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.2 Volano [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Fisica generale CC© BY:© $\© =©
5.3 Momento assiale delle forze motrici (in alto), delle forze resistenti (in mezzo)e risultante (in basso) in un volano [1] . . . . . . . . . . . . . . . . . . . . . 81
5.4 Struttura articolata ad aste incernierate con un grado di liberta [1] . . . . . 845.5 Struttura articolata ad aste incernierate con due gradi di liberta [1] . . . . . 855.6 Lavoro della forza peso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.7 Superficie chiusa S contenente un punto materiale A che genera un campo
gravitazionale [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.1 Forza di Coulomb esercitata da q1 su q2 [2] . . . . . . . . . . . . . . . . . . 966.2 Campo elettrostatico prodotto in P da Q+ [2] . . . . . . . . . . . . . . . . . 96
6.3 Campo elettrostatico infinitesimo d ~E prodotto da dq [2] . . . . . . . . . . . 976.4 Linee di forza del campo elettrostatico per una carica puntiforme positiva
(a), negativa (b), per un dipolo elettrico (c), per una lamina piena caricatadi segno positivo (d) [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.5 Schema dell’esperimento di Millikan [2] . . . . . . . . . . . . . . . . . . . . . 996.6 Struttura della materia [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1016.7 Potenziale elettrostatico [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . 1036.8 Potenziale elettrostatico di casi notevoli [2] . . . . . . . . . . . . . . . . . . 1046.9 Potenziale elettrostatico di casi notevoli . . . . . . . . . . . . . . . . . . . . 1066.10 Superficie equipotenziale [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . 1076.11 Circuitazione del campo elettrostatico lungo un circuito infinitesimo [2] . . 1096.12 Campo elettrostatico di un dipolo elettrico [2] . . . . . . . . . . . . . . . . . 1106.13 Sviluppo del potenziale in serie di multipoli [2] . . . . . . . . . . . . . . . . 111
7.1 Conduttore cavo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1147.2 Schermo elettrostatico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1147.3 Ripartizione della carica elettrica tra conduttori [2] . . . . . . . . . . . . . . 1167.4 Condensatore sferico [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1187.5 Forze agenti sull’armatura mobile di un condensatore piano [2] . . . . . . . 1217.6 Elettrostatica nei dielettrici . . . . . . . . . . . . . . . . . . . . . . . . . . . 1227.7 Elettrostatica nei dielettrici . . . . . . . . . . . . . . . . . . . . . . . . . . . 1277.8 Ponte di Wheatstone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1287.9 Circuito di carica-scarica di un condensatore . . . . . . . . . . . . . . . . . . 129
8.1 Esperimento di Ampere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1318.2 Forza di Lorentz [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1328.3 Campo magnetico di un filo rettilineo infinito [2] . . . . . . . . . . . . . . . 1338.4 Calcolo del rotore del campo magnetico [2] . . . . . . . . . . . . . . . . . . 1348.5 Calcolo del campo magnetico di un solenoide [2] . . . . . . . . . . . . . . . 1358.6 Campo magnetico prodotto da una lamina piana [2] . . . . . . . . . . . . . 1368.7 Moto di una particella carica in un campo magnetico uniforme [2] . . . . . 1388.8 Effetto Hall [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1388.9 Spira immersa in un campo magnetico uniforme [2] . . . . . . . . . . . . . . 140
9.1 Flusso tagliato per traslazione . . . . . . . . . . . . . . . . . . . . . . . . . . 1419.2 Flusso tagliato per rotazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 1429.3 Induttanze in serie accoppiate [2] . . . . . . . . . . . . . . . . . . . . . . . . 1459.4 Circuito di carica-scarica di un’induttanza . . . . . . . . . . . . . . . . . . . 1479.5 Circuito di carica-scarica di un’induttanza: extracorrente di chiusura (a
sinistra) e di apertura (a destra) [2] . . . . . . . . . . . . . . . . . . . . . . . 1489.6 Onda piana [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1519.7 Periodicita di un’onda piana monocromatica [2] . . . . . . . . . . . . . . . . 153
10.1 Pressione esterna [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16210.2 Funzione termometrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16310.3 Rappresentazione di trasformazioni su piano di Clapeyron . . . . . . . . . . 16410.4 Lavoro termodinamico [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16610.5 Lavoro termodinamico in trasformazioni quasi-statiche e in cicli termodinamici167
196 Elenco delle figure
Fisica generale CC© BY:© $\© =©
10.6 Urto elastico di una molecola contro la parete di destra del cubo in analisi [3]16810.7 Diagramma temperatura-pressione e punto triplo per sostanza che, fonden-
do, si dilata [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
11.1 Trasformazioni politropiche . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
12.1 Macchine termiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18112.2 Macchine frigorifere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18212.3 Dimostrazione dell’equivalenza degli enunciati di Kelvin-Planck e di Clau-
sius [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18312.4 Ciclo di Carnot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18412.5 Dimostrazione del teorema di Carnot [3] . . . . . . . . . . . . . . . . . . . . 18412.6 Cicli termodinamici particolari . . . . . . . . . . . . . . . . . . . . . . . . . 18612.7 Teorema di Clausius . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18712.8 Flusso di calore (spontaneo) tra due termostati . . . . . . . . . . . . . . . . 18912.9 Macchina termica e rendimento . . . . . . . . . . . . . . . . . . . . . . . . . 19012.10Rappresentazione di trasformazioni su piano [S, T ] . . . . . . . . . . . . . . 191
Elenco delle figure 197

Fisica generale CC© BY:© $\© =©
198 Elenco delle figure

Elenco delle tabelle
2.1 Tipi di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1 Classificazione degli urti in base al coefficiente di restituzione e . . . . . . . 58
5.1 Unita di misura del lavoro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.2 Confronto tra le equazioni caratteristiche della statica . . . . . . . . . . . . 835.3 Velocita di fuga per Terra e Luna . . . . . . . . . . . . . . . . . . . . . . . . 915.4 Energie potenziali delle principali forze di interesse . . . . . . . . . . . . . . 925.5 Unita di misura della potenza . . . . . . . . . . . . . . . . . . . . . . . . . . 925.6 Misura della potenza in CV . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
6.1 Forze fondamentali della natura . . . . . . . . . . . . . . . . . . . . . . . . . 100
7.1 Differenze tra campo elettromotore ed elettrostatico . . . . . . . . . . . . . 126
8.1 Campi magnetici notevoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
9.1 Induttanze notevoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Indice analitico
A (ampere), 132Accelerazione, 18, 35
→ centripeta, 20→ di Coriolis, 24→ di trascinamento, 24
Ago magnetico, 139Ampere (esperimento di), 131Ampere (legge della circuitazione di), 135Ampere (legge di), 148Ampere-Laplace (legge di), 132Ampere-Maxwell (legge di), 149Atomo, 100Attrito, 28, 167, 181→ radente, 28→ volvente, 29
Atwood (apparecchio di), 70Autoinduzione, 144Avogadro (prima legge di), 165Avogadro (seconda legge di), 165Avogadro (termometro a gas perfetto con
scala di), 163
Baricentro, 26, 27, 60, 61Biot-Savart (legge di), 131, 132Boltzmann (costante di), 166Boltzmann (relazione di), 193Boyle (legge di), 165
cal (caloria), 172CV (cavallo vapore), 92c (velocita della luce nel vuoto), 150Calore, 172, 173
→ molare, 174–176, 178→ specifico, 174, 176, 178
Campo di forza, 87→ conservativo, 88→ gravitazionale, 88, 89
Campo elettrico indotto, 143Campo elettromagnetico, 155–157Campo elettromotore, 126Campo elettrostatico, 96, 97Campo magnetico, 132, 136, 146Capacita elettrica, 116–118Capacita termica, 174
Carica elettrica, 95, 116, 125Carnot (ciclo termodinamico di), 183, 191Carnot (teorema di), 183, 189Cavendish (esperimento di), 38Centro di massa, 60, 79Cerniera, 27Charles (legge di), 165Clapeyron (piano di), 164Clausius (disuguaglianza di), 187Clausius (enunciato di), 182Clausius (integrali di), 188Condensatore, 117, 120–122, 129, 146Conducibilita, 125Conduttore, 113Conduzione, 173Conservazione dell’energia (principi di), 91,
107, 125, 146, 156, 172Convezione, 173Coriolis (accelerazione di), 24Coriolis (forza di), 50, 53, 54Corpo nero, 174Corpo rigido, 22, 23Corrente elettrica, 124, 125Costante di tempo, 129Coulomb (legge di), 95Coulomb (teorema di), 115
D’Alembert (equazione d’onda di), 151Dielettrico, 113, 122, 123Diesel (ciclo termodinamico di), 186Differenza di potenziale (d.d.p.), 102Dinamica, 40, 46→ equazioni cardinali (della), 56, 60→ principı (della), 35→ terzo principio (della), 35, 36, 56
Dipolo elettrico, 104, 109, 112Dirichlet (problema di), 109Doppio strato, 106Drude-Lorentz (modello classico della con-
duzione di), 126
eV (elettronvolt), 108ε0 (permettivita elettrica del vuoto), 96Effetto punte, 116
Fisica generale CC© BY:© $\© =©
Effetto termoelettrico, 173Energia, 75
→ calore, 172→ cinetica, 60, 79→ degrado (della), 190→ elettromagnetica, 155→ elettrostatica, 120→ interna, 171, 175, 178→ libera→ di Gibbs, 192→ di Helmholtz, 192→ magnetica, 146→ meccanica, 91→ potenziale, 91, 108, 117, 119
Entalpia, 173Entropia, 188, 189, 193Equilibrio→ meccanico, 162→ termodinamico, 162, 193
F (farad), 116Faraday (gabbia di), 114Faraday (legge di), 141, 148Faraday-Lenz (legge di), 141Fletcher (apparecchio di), 69Flusso→ concatenato, 150→ del campo elettrostatico, 98→ tagliato, 142
Forza→ elastica, 41→ elettromotrice (f.e.m.), 127→ idraulica, 44→ posizionale, 87
Forza apparente→ centrifuga, 52, 53→ di Coriolis, 50, 53, 54→ di trascinamento, 50, 53
Forze apparenti, 50Forze d’interazione, 50Forze vive (teorema delle), 78Foucault (pendolo di), 53Fourier (legge di), 173Fourier (teorema di), 154
γ, G (cost. di gravitazione universale), 38g (accelerazione di gravita terrestre), 36, 48,
53Gas (equazione di stato dei), 165Gas perfetto, 163, 165, 169, 170, 176→ equazione di stato (del), 166→ lavoro (del), 167, 168→ teoria cinetica (del), 168→ termometro di Avogadro (a), 163
Gauss (legge di), 98, 148Gauss (legge per il magnetismo di), 131, 148Gauss (teorema di), 89, 90Gay-Lussac (prima legge di), 165
Gay-Lussac (seconda legge di), 165Generatore di f.e.m., 127Gibbs (energia libera di), 192Gradi di liberta, 21Gravitazione universale, 36
Hall (effetto di), 138Helmholtz (energia libera di), 192Hooke (legge di), 25Huygens-Steiner (teorema di), 63
Impulso, 36, 157, 169Induttanza, 135, 144–147Induzione→ completa, 117→ di trasformazione, 143→ elettrica, 124→ elettrostatica, 95→ per moto relativo, 141, 142
Inerzia, 35, 50→ momento (d’), 63→ raggio (d’), 63
Irraggiamento, 174Isolante, 113, 122, 123
Joule (esperimento di), 172, 178
K (Kelvin), 163k (costante di Boltzmann), 166Kater (pendolo di), 66Kelvin (definizione di zero assoluto di), 185Kelvin-Planck (enunciato di), 181Keplero (leggi di), 37Kirchhoff (legge dei nodi di), 128Kirchhoff (legge delle maglie di), 128Konig (teorema di), 79
Laplace (equazione di), 109Laplace (prima legge elementare di), 132Laplace (seconda legge elementare di), 132Lavori virtuali (principio dei), 77, 78Lavoro, 75, 87→ motore, 167→ resistente, 167→ termodinamico, 166→ virtuale, 78
Lenz (legge di), 141Lorentz (forza di), 132, 137, 138Lorenz (gauge ristretta di), 150
µ0 (permeabilita magnetica del vuoto), 132Macchina, 75, 80Macchina termica, 181→ coefficiente di prestazione (frigorife-
ro), 182, 185→ monoterma, 182→ rapporto di compressione, 186→ rendimento (termico), 182, 183, 185,
189
Indice analitico 201
Fisica generale CC© BY:© $\© =©
→ reversibile di Carnot, 183Macrostato, 193Maglia, 128Magnete, 139Mano destra (regola della), 131Massa (gravitazionale), 39Massa (inerziale), 35Materia, 100Maxwell (equazioni di), 149→ nel vuoto, 149→ seconda equazione, 108
Mayer (relazione di), 176Meccanica statistica, 193Microstato, 193Millikan (esperimento di), 99Momento, 14→ angolare, 56, 62→ angolare assiale, 63→ assiale, 15→ d’inerzia, 63→ della quantita di moto, 56, 62→ di dipolo, 104, 111→ di dipolo magnetico, 139
Monopolo elettrico, 112Moto, 17, 18→ armonico, 21→ circolare uniforme, 20→ livelli di moto, 17→ perpetuo, 172→ rettilineo uniforme, 19→ rettilineo uniformemente accelerato,
20→ tipi (di), 19
Motore, 92Multipolo, 111Mutua induttanza, 144, 150Mutua induzione, 144, 150
Neumann (problema di), 109Newton (legge della gravitazione universale
di), 37Newton (legge di), 173Nodo, 128
Oersted (esperimento di), 131Ohm (prima legge di), 125Ohm (seconda legge di), 125Onda elettromagnetica→ TE, 154→ TEM, 154→ TM, 154→ lunghezza d’onda, 154→ numero d’onda, 153→ periodo, 153→ piana, 151, 154→ piana monocromatica (armonica), 153→ polarizzata linearmente, 155→ progressiva, 152
→ regressiva, 152→ relazione di dispersione, 153→ sferica, 152→ superficie d’onda, 153→ velocita di fase, 153→ vettore d’onda, 153
Otto (ciclo termodinamico di), 185
Parete adiabatica, 162, 174Parete diatermica, 162Pendolo→ composto, 65→ di Foucault, 53→ di Kater, 66→ semplice, 47
Peso, 41, 87Piano inclinato, 46Poisson (equazione di), 109Poisson (formule di), 22Polarizzazione, 113, 122, 123Posizione, 17, 23Potenza, 92Potenziale, 88, 91, 115, 157→ elettromagnetico, 149, 150→ elettrostatico, 102, 103, 111, 157→ coulombiano, 102
→ vettore, 136, 157Poynting (teorema di), 156Poynting (vettore di), 156Pressione, 162Pressione elettrostatica, 115, 121Punto triplo, 170
Quantita di moto, 36, 56, 60→ momento angolare, 62→ momento angolare (della), 56
Quanto elementare, 95Quark, 95
R (costante universale dei gas), 166, 176Rendimento, 189Resistenza idraulica, 44Resistenza viscosa, 42Resistivita, 125Rotolamento puro→ caso dinamico, 66→ caso statico, 27, 33
Rotore, 16
σ (cost. di Stefan-Boltzmann), 174Schermo elettrostatico, 114Sistema di riferimento→ cambiamento, 23, 24→ cambiamento (cinematica), 23→ inerziale (dinamica), 50
Sistema termodinamico, 161→ idrostatico, 162, 175→ semplice, 162
Solenoide, 135, 145
202 Indice analitico
Fisica generale CC© BY:© $\© =©
Spira, 139Spostamento virtuale, 77, 78Statica
→ equazione simbolica (della), 83→ equazioni cardinali (della), 25, 83→ principı (della), 25
Stazionarieta, 124, 125, 144, 150, 155Stefan (legge di), 174Stefan-Boltzmann (costante di), 174Stirling (ciclo termodinamico di), 185Superficie equipotenziale, 107Suscettivita, 123
τ (costante di tempo), 129Temperatura, 163→ assoluta, 185→ caratteristica termometrica, 163→ critica, 170→ di equilibrio, 174→ funzione termometrica, 163
Termodinamica, 162, 166→ coordinata (variabile), 161, 190→ primo principio, 172, 176→ principio zero, 163→ secondo principio, 189, 192→ terzo principio, 185, 193
Termostato, 165Trasformazione termodinamica, 162→ adiabatica, 165, 177→ ciclica, 172→ espansione libera, 175, 188→ irreversibile, 164→ isobara, 173→ isocora, 173→ isoterma, 165→ politropica, 168, 178→ quasi-statica, 164, 172, 177→ reversibile, 164
Triboelettricita, 95
Universo termodinamico, 161Urto, 57→ anelastico, 59→ elastico, 59→ restituzione (coefficiente di), 58, 59
van der Waals (equazione di), 166Velocita, 18, 23→ angolare, 23→ areolare, 18→ della luce nel vuoto, 150→ di deriva, 124, 126→ di fase, 153→ di fuga, 90→ di trascinamento, 24
Vettori e operatori→ derivata di un punto, 14→ derivata di un vettore, 14
→ divergenza (teorema della), 99→ doppio prodotto misto, 13→ integrale di un vettore, 14→ prodotto scalare, 12→ prodotto vettoriale, 12→ rotore, 16→ versore, 11→ vettore applicato, 14→ ∇2 (laplaciano), 109
Vincolo, 21, 26→ bilaterale, 78→ cerniera, 27→ ideale, 26→ rotolamento puro, 27→ su una linea, 26→ su una superficie, 26, 27→ unilaterale, 78
Volano, 81Volume, 161
Wheatstone (ponte di), 128
Zero assoluto, 185
Indice analitico 203

Fisica generale CC© BY:© $\© =©
204 Indice analitico

Bibliografia
[1] Antonio Bertin, Mario Poli, Antonio Vitale. Fondamenti di meccanica. Esculapio, 1997.
[2] Sergio Focardi, Ignazio Massa, Arnaldo Uguzzoni. Fisica generale. Elettromagnetismo.Casa Editrice Ambrosiana, 2003.
[3] Sergio Focardi, Ignazio Massa, Arnaldo Uguzzoni. Fisica generale. Termodinamica efluidi. Casa Editrice Ambrosiana, 2004.