G. Costa, Roma 16 maggio 2006 Commissione I LAr: status report 1.

Prof. Claudio Melchiorri
DEIS-Università di Bologna
Tel. 051 2093034
e-mail: [email protected]
http://www-lar.deis.unibo.it/~cmelchiorri
EVOLUZIONE NEL TEMPO EVOLUZIONE NEL TEMPO DI SISTEMI DINAMICIDI SISTEMI DINAMICI
CONTROLLI AUTOMATICI LSIngegneria Informatica

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
2SommarioSommarioCalcolo della evoluzione nel tempo dello stato x(t) di un sistema dinamico
1) Caso generale non lineare
2) Caso lineare non stazionario
3) Caso lineare stazionario
uingresso
yuscitaΣ
x stato

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
3SistemiSistemi a a statostato vettorevettoreConsidereremo ora sistemi dinamici in forma ingresso-stato-uscita, ove x, y, z sono opportuni segnali appartenenti a spazi vettoriali
Si hanno dunque:1. Sistemi monovariabili o SISO (Single-Input Single-Output)
se p = q = 12. Sistemi multivariabili o MIMO (Multi-Input Multi-Output)
se p > 1, q > 1
uingresso
yuscita
Σ
x stato

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
4SistemiSistemi a a statostato vettorevettoreModello matematico
Lineare
Non lineare
Stazionario Non Stazionario
Con A(t), B(t), C(t), D(t)continue a tratti
Stazionario Non Stazionario

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
5SistemiSistemi a a statostato vettorevettoreUn sistema lineare stazionario (caso particolare) è rappresentato:
nel caso MIMO da 4 matrici (A, B, C, D)nel caso SISO da (A, b, c, d).
B C
D
u f x y+
+
x(0)
u : ingresso; y : uscita; f : azione forzante; x : stato
A : matrice del sistemaB : matrice di distribuzione degli ingressiC : matrice di distribuzione delle usciteD : matrice del legame algebrico ingresso/uscita

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
6SistemiSistemi a a statostato vettorevettoreProblema: definire (calcolare) l’evoluzione dello stato x(t) a partire da date condizioni iniziali x0 e assegnato un certo ingresso u(.)
x(0)
t x(t)
traiettoria
Spazio degli stati
Insieme delle velocitàammissibili
t
u
t1 t2 t3

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
7EsempioEsempio
Robot a 2 gradi di libertà
θ1
θ2
θi: variabile di giuntoτi: coppia applicata al giuntomi: massa del braccioai: lunghezza braccioaci: posizione baricentroIi: momento di inerziag: accelerazione gravitàSi, Ci: sin(θi), cos(θi)
Date le coppie τ1 e τ2, determinaregli andamenti di θ1 e θ2
! ! ! Problema non semplice…
Del tipo

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
8SistemiSistemi non non linearilineariTeorema. L’equazione differenziale
ammette una unica soluzione x(t) se1. La funzione f(x, ·) è continua a tratti ∀ x ∈ Rn, ∀ t ≥ t02. Per ogni t ≥ t0 che non sia punto di discontinuità di f(x, ·) e per ogni
coppia di vettori x1, x2 valga la condizione di Lipschitz
Dimostrazione. Basata sulla successione di funzioni convergenti alla soluzione (successione di Peano-Picard)
Corollario: La soluzione x(t) è una funzione continua

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
9SistemiSistemi non non linearilineariRimane il problema del calcolo della soluzione della eq. differenziale
Metodi numericiMetodi analitici
Calcolo numerico dell’integrale di una funzione data per campioni
f(t0), f(t1), …, f(tn)
Metodo dei rettangoli
Metodo dei trapezi (interpolazione lineare nei periodi elementari)
t
f
t
f

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
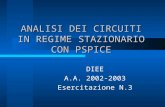
10SistemiSistemi non non linearilineariRegola di Simpson (interpolazione quadratica nei periodi elementari)
(n pari => num. campioni dispari)
h: 0.5Metodo rettangoli: 3.00236726015005Metodo trapezi: 2.85542094707693Metodo Simpson: 2.87929762575957
h: 0.25Metodo rettangoli: 2.94669069425499Metodo trapezi: 2.87321753771844Metodo Simpson: 2.87914973459894
0 1 2 3 4 5 6-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Funzione
h: 0.1Metodo rettangoli: 2.90758196912244Metodo trapezi: 2.87819270650781Metodo Simpson: 2.87914021733018
h: 0.0001Metodo rettangoli: 2.87916935623558Metodo trapezi: 2.87913996697296Metodo Simpson: 2.87913996792015

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
11SistemiSistemi non non linearilineariMetodi di Runge-Kutta
Sostituendo la derivata con il rapporto incrementale relativo al passo di discretizzazione h si ottiene
espressione che corrisponde ai primi due termini dello sviluppo in serie di Taylor della funzione x(ti+1):
I “metodi di Runge-Kutta” approssimano lo sviluppo in serie di Taylor sostituendo le derivate di ordine superiore al primo con una opportuna combinazione lineare dei valori della derivata prima, calcolati in vari punti dell’intervallo elementare.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
12SistemiSistemi non non linearilineariI metodi di Runge-Kutta sostituiscono le derivate di ordine superiore al primo con una opportuna combinazione lineare dei valori della derivata prima, calcolati in vari punti dell’intervallo elementare.
Ad esempio, il metodo di Runge-Kutta del terzo ordine consiste nella relazione
con

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
13SistemiSistemi linearilineari non non stazionaristazionariSi consideri ora un sistema lineare non stazionario del tipo
Per i sistemi lineari vale la proprietà di scomposizione del moto e della risposta
Moto libero Moto forzato
Risposta libera Risposta forzata

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
14SistemiSistemi linearilineari non non stazionaristazionariDa
Per via della linearità della funzione si deve potere scrivere
Dove Φ(.,.) viene detta matrice di transizione di stato e deve ovviamente fornire la soluzione della eq. differenziale omogenea
Moto libero Moto forzato

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
15SistemiSistemi linearilineari non non stazionaristazionariSi consideri il sistema lineare non stazionario omogeneo
x(t) vettore n x 1A(t) matrice reale n x n di funzioni continue a tratti
Si definisce la matrice di transizione dello stato come la (unica) soluzione dell’equazione differenziale matriciale
dove X(t) è una matrice reale n x n ed I la matrice identità n x n
La Φ(t,t0) ha come colonne le n soluzioni corrispondenti alle condizioni iniziali x(t0) = ei, essendo ei la i-esima colonna della matrice identità

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
16SistemiSistemi linearilineari non non stazionaristazionariLa soluzione della (1) è data da:
Proprietà della matrice di transizione
Nonsingolarità: la matrice è non singolare per ogni coppia (t, t0) – conseguenza della unicità della soluzione di (1)
Invertibilità:
Componibilità:
Separabilità:
Evoluzione nel tempo del determinante:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
17SistemiSistemi linearilineari non non stazionaristazionariCalcolo della matrice di transizione
La matrice di transizione si può determinare in due modi:
Successione di Peano-Baker
Metodi di Runge-Kutta: basati sulla integrazione numerica passo passo di equazioni differenziali del tipo
su di un passo di integrazione specificato δt

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
18OperazioniOperazioni susu matricimatriciData una matrice m x n i cui elementi sono funzioni del tempo:
La derivata rispetto al tempo o l’integrale nel tempo della matrice A(t) sono matrici m x n con elementi le derivate o gli integrali degli elementi aij(t)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
19SistemiSistemi linearilineari non non stazionaristazionariSi consideri il sistema lineare non stazionario non omogeneo
Teorema: La soluzione della (2), per u(t) continua a tratti assegnata in [t0, t1] e x0, t0 dati, è
Moto libero Moto forzato

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
20SistemiSistemi linearilineari non non stazionaristazionariDimostrazione: Data una generica matrice X(t), derivando l’uguaglianza X-1(t) X(t) = I si ottiene:
per cui si ha
Essendo ed utilizzando la (2) si ha:
da cui integrando
dove c è un vettore costante che dipende dalle condizioni iniziali. Utilizzando le proprietà di componibilità e invertibilità della Φ si conclude la dimostrazione.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
21SistemiSistemi linearilineari non non stazionaristazionariLe precedenti relazioni servono per l’analisi dei sistemi MIMO lineari non stazionari:
Si ottiene infatti
B(t) C(t)
D(t)
u f x y+
+
x(0)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
22SistemiSistemi linearilineari non non stazionaristazionariGli integrali nelle (3) e (4) sono integrali di convoluzione. Si definiscono le funzioni
dette rispettivamente:
matrice di risposta all’impulso ingresso-statomatrice di risposta all’impulso ingresso-uscita.
Se il sistema non è puramente dinamico, cioè D(t) ≠ 0, l’impulso agisce direttamente sull’uscita; in caso contrario lo stato x(t) èespresso da una funzione continua e l’uscita y(t) è continua a tratti
δ(t): impulsodi Dirac in t = 0

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
23ImpulsoImpulso di Diracdi DiracImpulso di Dirac
Si dimostra che per il seguente sistema vale
Ricordando che , si nota che un ingresso impulsivo equivale ad uno stato iniziale (sistemi a tempo continuo)
t0 + τt0
1/τ
t
Δ(τ,t0,t)
Questa funzione, al limite per t →∞, tende ad un segnale di area unitaria e valore infinito, indicato con δ(t-t0)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
24ImpulsoImpulso di Diracdi DiracSi ha dunque:
Nel casi di sistemi a tempo discreto, l’impulso δ(k-h) è il segnale uguale a 1 per k = h, zero altrimenti.
Nel caso dei sistemi a tempo discreto non è vero che un ingresso impulsivo equivale ad uno stato iniziale (ha un effetto ritardato di 1).

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
25SistemaSistema linearelineare stazionariostazionario omogeneoomogeneo
La matrice di transizione coincide con l’esponenziale di matrice, cioè
definita con lo sviluppo in serie di potenze
e che converge in norma per ogni t. Infatti, posto m = || A ||, per cui è || Ai || · mi, si ha

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
26SistemaSistema linearelineare stazionariostazionario omogeneoomogeneoNota bene: data una matrice m x n:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
27PerchPerchèè esponenzialeesponenziale di di matricematrice??Consideriamo la coppia di equazioni differenziali
Nel caso di equazioni scalari del tipo , la soluzione è data da una funzione u(t) = u0 ea t, e ovviamente il suo comportamento per t che tendeall’infinito dipende dal segno e valore di a (o della sua parte reale).
Cerchiamo soluzioni esponenziali anche per il caso matriciale, cioè
Se così è, sostituendo nella eq.ne differenziale si ha

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
28AutovaloriAutovalori ed ed autovettoriautovettoriSi è così visto che da eq.ni differenziali si arriva a formulare un problema algebrico del tipo
Per la soluzione del problema occorre quindi cheil vettore x sia nello spazio nullo di (λ I - A)λ sia scelto in modo che (λ I - A) abbia uno spazio nullo!
Lo scalare λ deve quindi essere tale da verificaredet(λ I - A) = 0 autovalore
(λ I - A) x = 0 autovettore

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
29AutovaloriAutovalori ed ed autovettoriautovettoriLa soluzione al problema di partenza è quindi data da funzioni del tipo
dove c1 e c2 sono opportuni costanti da definire sulla base delle condizioniiniziali
In questo caso si ha
Si può verificare che

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
30AutovaloriAutovalori ed ed autovettoriautovettoriData una matrice A, n x n, reale o complessa, si consideri l’equazione:
Questa equazione ammette soluzioni x ≠ 0 se e solo se (λ I - A) è singolare, cioè se e solo se
Il primo membro è un polinomio q(λ) di grado n detto polinomio caratteristico di A. Esso ha coefficienti reali se A è reale.
La (2) è detta equazione caratteristica di A ed ammette n radici λ1, …, λn in generale complesse, dette autovalori o valori caratteristici di A.
Se A è reale, gli autovalori complessi sono coniugati a coppie.
L’insieme σ(A) di tutti gli autovalori di A è detto spettro di A
Teorema di Cayley-Hamilton: ogni matrice soddisfa la sua equazione caratteristica, cioè q(A) = 0
(1)
(2)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
31AutovaloriAutovalori ed ed autovettoriautovettoriEsempio: Data la matrice A

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
32AutovaloriAutovalori ed ed autovettoriautovettoriAd ogni autovalore λi corrisponde almeno un vettore xi, reale o complesso, che soddisfa la (1), detto autovettore o vettore caratteristico di A.
Se xi è un autovettore, anche α xi lo è. Si possono dunque utilizzare autovettori normalizzati (a norma unitaria, ponendo α = 1/||xi||) .
Se A è reale, gli autovettori corrispondenti ad autovalori complessi coniugati sono complessi coniugati.
Sia A una matrice n x n reale o complessa. Se gli autovalori di A sono distinti, i corrispondenti autovettori sono linearmente indipendenti.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
33AutovaloriAutovalori ed ed autovettoriautovettoriEsempio
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
34AutovaloriAutovalori ed ed autovettoriautovettoriEsempio
[V, D] = eig(A)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
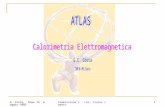
35AutovaloriAutovalori ed ed autovettoriautovettoriEsempio
[V, D] = eig(A)
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
Essendo v = [0, 1]T un autovettore, questa “direzione”non è modificata dalla moltiplicazione per A.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
36MatriciMatrici similisimiliDue matrici A e B si dicono simili se esiste una matrice non singolare T tale che
Matrici simili hanno gli stessi autovalori. Infatti da B = T-1 A T con T non singolare segue
E quindi det(λ I - A) = 0 sse det(λ I – B) = 0
La proprietà di similitudine consente di risolvere più semplicemente un sistema lineare stazionario omogeneo
Infatti, posto x = T z, z = T-1 x, si può scrivere:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
37
Una importante trasformazione di similitudine è quella che trasforma una generica matrice quadrata A alla forma di Jordan, particolarmente adatta per lo studio di sistemi dinamici.Nel caso in cui, data una matrice A generica, si possa trovare una matrice B similetale che il corrispondente esponenziale eB t sia facilmente calcolabile, allora si può ottenere
Se A fosse simmetrica, non ci sarebbero problemi in quanto ammetterebbe nautovettori linearmente indipendenti, e dalla relazione
ponendo T = [t1, …, tn] si avrebbe A T = T Λ con Λ matrice diagonale degli autovalori, quindi
MatriciMatrici similisimili
l’esponenziale di una matrice realesimmetrica ha tutti gli elementiconsistenti in una combinazione linearedelle esponenziali dei suoi autovalori, che sono tutti reali
Autovettori

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
38Matrici simili Matrici simili -- esempioesempioData la matrice:
Si ha:
E quindi
In questo modo è semplice calcolare la soluzione z(t) a partire da z0, e quindi risalire alla soluzione x(t) del problema iniziale

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
39Forma di Jordan Forma di Jordan complessacomplessaCaso generale. Una generica matrice reale A n x n ha gli autovalori, in generale, complessi: λ1, …, λm, m · n. La forma di Jordan (complessa) è:
dove Ji,j, blocco di Jordan relativo all’autovalore λi, è dato da
Matrice diagonalea blocchi

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
40Forma di Jordan Forma di Jordan realerealeLa forma di Jordan complessa si può ricondurre a reale, traendo vantaggio dal fatto che valori complessi nei blocchi e in T sono associati ai complessi coniugati.Siano:
λ1, λ2, … λh gli autovalori reali di A μ1, μ2, …, μh i loro ordini di molteplicità
σ1 ± j ω1 , σ2 ± j ω2 , …, σk ± j ωk , gli autovalori complessiν1, ν2, … νk i loro ordini di molteplicità
per cui è n = μ1+μ2 + … + μh + 2 (ν1 + ν2 + … + νk)Forma di Jordan reale:
R1, … Rn sono blocchi corrispondentiad autovalori reali ,
C1, …Ck sono blocchi reali di “nuovotipo”, corrispondenti ciascuno a unacoppia di blocchi complessi coniugatidella forma di Jordan complessa.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
41Forma di Jordan Forma di Jordan realerealeI blocchi corrispondenti ad autovalori reali sono del tipo:
N.B.:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
42Forma di Jordan Forma di Jordan realerealeI blocchi corrispondenti ad autovalori complessi coniugati sono del tipo:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
43Forma di Jordan Forma di Jordan realerealeScrivibile anche come

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
44Forma di Jordan Forma di Jordan realerealeIn definitiva, in eA t si ritroveranno termini del tipo:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
45SoluzioneSoluzione delldell’’equazioneequazione differenzialedifferenziale
In conclusione, per il calcolo dell’evoluzione dello stato x(t):
Sistemi non lineari: in generale tecniche numeriche
Sistemi lineari non stazionari: Φ(t,t0) (succ. Peano Baker)
Sistemi lineari stazionari: eA t (forma di Jordan)
x(0)
t x(t)
traiettoria
Spazio degli stati
Insieme delle velocitàammissibili

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
46EsempioEsempio 11Determinare la soluzione x(t) del sistema dinamico descritto da
Calcolo degli autovaloriGli autovalori λ1 e λ2 della matrice A si calcolano uguagliando a zero il determinantedella matrice (λ I – A), cioè:
In questo caso si ha:
e quindi
cosa del resto ovvia visto che la matrice A è triangolare bassa e quindi i suoi autovalorisono gli elementi sulla diagonale.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
47EsempioEsempio 11Calcolo degli autovettoriDetto t il generico autovettore associato all'autovalore λ, deve essere
e quindi:per λ = -1
per λ = -2

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
48EsempioEsempio 11Si ha dunque
Verifica:
Dalla relazione x = T z otteniamo z = T-1 x e quindi lo stato iniziale è

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
49EsempioEsempio 11La soluzione del nuovo sistema (in z) è quindi data da
ed in definitiva:
Verifica in Matlab/Simulink
z
To Workspace3
y1
To Workspace2
y
To WorkspaceStep
x' = Ax+Buy = Cx+Du
State-Space1
x' = Ax+Buy = Cx+Du
State-Space
K*u
MatrixGain
t
To Workspace1Clock

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
50EsempioEsempio 11
0 2 4 6 8 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2Andamento di x
Tempo (sec) 0 2 4 6 8 10-1
-0.5
0
0.5
1
1.5
2Andamento di z
Tempo (sec)
0 2 4 6 8 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2Andamento di T z
Tempo (sec)
Andamenti di [x1; x2]
Andamenti di [z1; z2]
Andamenti di T*[z1; z2]

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
51EsempioEsempio 22Determinare la soluzione x(t) del sistema dinamico descritto da
Calcolo degli autovaloriGli autovalori λ1, λ2 e λ3 della matrice A si calcolano uguagliando a zero il determinantedella matrice (λ I – A), cioè:
In questo caso si ha:
e quindi

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
52EsempioEsempio 22Calcolo degli autovettoriDetto t il generico autovettore associato all'autovalore λ, deve essere (λΙ −Α) t = 0 e quindi:
per λ = -1
per λ = -2
per λ = -3

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
53EsempioEsempio 22Si ha dunque
Verifica:
Dalla relazione x = T z otteniamo z = T-1 x e quindi lo stato iniziale è

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
54EsempioEsempio 22La soluzione del nuovo sistema (in z) è quindi data da
ed in definitiva:
Verifica in Matlab/Simulink
z
To Workspace3
y1
To Workspace2
y
To WorkspaceStep
x' = Ax+Buy = Cx+Du
State-Space1
x' = Ax+Buy = Cx+Du
State-Space
K*u
MatrixGain
t
To Workspace1Clock

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
55EsempioEsempio 22
Andamenti di [x1; x2 ; x3]
Andamenti di [z1; z2 ; z3]
Andamenti di T*[z1; z2 ; z3]
0 2 4 6 8 10-3-2.5
-2-1.5
-1-0.5
00.5
11.5
2Andamento di z
Tempo (sec)0 2 4 6 8 10-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4Andamento di x
Tempo (sec)
0 2 4 6 8 10-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4Andamento di T z
Tempo (sec)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
56SistemiSistemi a tempo a tempo discretodiscretoSi consideri il sistema a tempo discreto lineare non stazionario omogeneo
Analogamente al caso tempo continuo, si definisce la matrice di transizione dello stato Φ(k,h) come la matrice che ha come colonne le n soluzioni corrispondenti alle condizioni iniziali x(h) = ei, essendo ei la i-esima colonna della matrice identità. La matrice di transizione soddisfa la
Contrariamente al caso a tempo continuo, la matrice di transizione dei sistemi a tempo discreto può essere singolare.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
57SistemiSistemi a tempo a tempo discretodiscretoNel caso stazionario, in cui la (1) diviene
la matrice di transizione dello stato coincide con la potenza dimatrice, cioè si ha
Infatti

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
58SistemiSistemi a tempo a tempo discretodiscretoIn relazione al sistema lineare stazionario non omogeneo
si ricava la relazione
facilmente dimostrabile per verifica diretta e, per il sistema complessivo

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
59SistemiSistemi a tempo a tempo discretodiscretoLa matrice di risposta all’impulso ingresso-stato e la matrice di risposta all’impulso ingresso-uscita sono

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
60StabilitStabilitààDefinizione: Il sistema omogeneo
è asintoticamente stabile se è
Teorema: il sistema (1) è asintoticamente stabile se e solo se gli autovalori di A sono tutti con parte reale negativa
Dim. Basata sul fatto che λ = ρ, oppure λ = σ + j ω e quindi
NB: pure i termini tn eλ t tendono a 0 per t -> ∞

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
61StabilitStabilitààDefinizione: Il sistema omogeneo
è asintoticamente stabile se è
Teorema: il sistema (2) è asintoticamente stabile se e solo se gli autovalori di A hanno tutti modulo minore di 1
Dim. Basata sul fatto che λ = ρ, oppure λ = ρ ej ϕ e quindi

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
62AppendiceAppendice
Spazi vettoriali e matrici:
DefinizioniAlcune proprietà geometriche

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
63AlcuneAlcune proprietproprietàà geometrichegeometriche{e1, e2, e3}: base principale (colonne della matrice I)V: sottospazio (insieme di vettori)v1, v2: base del sottospazio VV = [v1. v2]: matrice di base del sottospazio V
Data A n x n, V si dice invariante in A se èA V ⊆ V
La somma e l’intersezione di due invarianti è un invariante
Cambiamenti di baseAl posto della base e1, e2, e3 si assume una nuova base h1, h2, h3 con T = [h1, h2, h3] non singolare.Si indica con x il vettore delle componenti di un punto p nella base principale, con z le componenti nella nuova. Si ha
x = T z, z = T-1 xNella nuova base, ad A n x n corrisponde
A1 = T-1 A T
e1
e3
e2
v1 v2
V
e1
e3
e2
h1
h3h2
p

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
64AlcuneAlcune proprietproprietàà geometrichegeometriche
Data una matrice A, m x n, si definiscono i sottospazi

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
65PseudoinversaPseudoinversa di di unauna matricematriceSia dato un sistema lineare espresso dalla relazione
A x = bCNS perché esso ammetta almeno una soluzione è che
b ∈ im A (1)
Se questa è soddisfatta, detta x0 una soluzione particolare, l’insieme delle possibili soluzioni è
x = x0 + ker Ae in forma parametrica
x = x0 + K αin cui K è una matrice di base di ker A e α ∈ Rq arbitrario, con q = dim(ker A)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
66PseudoinversaPseudoinversa di di unauna matricematrice
Se la (1) non è soddisfatta, si può ricercare il valore di x tale da minimizzare l’errore (norma euclidea) che si commette
|| A x1 – b||2 minima
Se A è quadrata e non singolare, allora im A = Rn, ker A = {0} per cui la soluzione esiste ed è unica, definita da
x = A-1 b
A
A-1
Rn
Rn
im A

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
67PseudoinversaPseudoinversa di di unauna matricematriceSe A non è quadrata o è singolare, allora la sua inversa non esiste e si deve utilizzare la pseudoinversa A+
Data la matrice A m x n, vi sono in generale due casi: m < n; m > n1) m < n rank A = min(m,n) = m → im (A) = Rm
∀ b ∃ x t.c. b = A x (ne esiste piu` di uno!)
x = A+ b ∃ ker(A) t.c. ∀ x ∈ ker(A) -> y = A x = 0→ x = A+ b + xn -> b = A(A+ b + xn) = b, ∀ xn ∈ ker(A)→ x = A+ b + (I – A+ A) α espressione generale della soluzione
x = A+ b ha norma minima
R n
R m
im A
A
A+
0
ker A

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
68PseudoinversaPseudoinversa di di unauna matricematriceSe A non è quadrata o è singolare, allora la sua inversa non esiste e si deve utilizzare la pseudoinversa A+
Data la matrice A m x n, vi sono in generale due casi: m < n; m > n2) m > n rank A = min(m,n) = n ∀ x ∃ ! b t.c. b = A x ∀ b ∈ im (A) ∃ ! x t.c. b = A x (x = A+ b) se b ∉ im (A) → @ x t.c. b = A x se pero` b0 ∉ im (A) → ∃ x0 = A+ b0 → b = A x0 = A A+ b0 ≠ b0 (A A+ ≠ I)|| b – b0 || e’ minima
R n
R m
A
A+
im A

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
69PseudoinversaPseudoinversa di di unauna matricematrice
x0
xb
R n
R mim Aim AT
ker A
ker AT
x0

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
70Norme di vettori e matriciNorme di vettori e matriciNorma: generalizzazione della nozione di distanza (lunghezza).
Norma di vettore: La norma ||·|| di un vettore x ∈ Rn è una funzioneRn → R tale che:
Norme comuni in Rn :
Norma euclidea

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
71Norme di vettori e matriciNorme di vettori e matriciEsempio: Dato x = [1, -2, 2]T → ||x||1 = 5, ||x||2 = 3, ||x||∞ = 2.
Lemma: Siano ||x||a e ||x||b due norme di x ∈ Rn. Esistono infinitiscalari positivi k1, k2 tali che
Le norme ||·||a e ||·||b sono dette equivalenti. Vero ∀ coppia di normein Rn.
Esempio:
Dato x = [1, -2, 2]T, allora:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
72Norme di vettori e matriciNorme di vettori e matriciUn vettore x può essere moltiplicato per la matrice A: y = A x. Per mettere in relazione la `dimensione' di y e di x, si definisce la norma di matrice come segue.
Norme di matrici (indotte). Sia ||x|| una norma di x ∈ Rn.
Una matrice A ∈ Rn x n ha la norma indotta da ||·|| definita come:
Segue che:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
73Norme di vettori e matriciNorme di vettori e matriciAlcune norme di matrici:
Se

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
74AutovaloriAutovalori, , AutovettoriAutovettori, , AutospaziAutospaziSia A una matrice quadrata n x n a valori in R.
DefinizioneSi chiama polinomio caratteristico di A il polinomio di grado n
DefinizioneSi chiama equazione caratteristica di A l’equazione
DefinizioneLe n soluzioni dell’equazione caratteristica sono detti autovalori di A

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
75AutovaloriAutovalori, , AutovettoriAutovettori, , AutospaziAutospaziDefinizioneSi definisce molteplicità algebrica dell’autovalore la sua molteplicitàcome radice di .Un autovalore con molteplicità algebrica 1 è detto semplice .
Si chiama polinomio caratteristico di A il polinomio di grado n
DefinizioneSi chiama equazione caratteristica di A l’equazione
DefinizioneLe n soluzioni dell’equazione caratteristica sono detti autovalori di A

Prof. Claudio Melchiorri
DEIS-Università di Bologna
Tel. 051 2093034
e-mail: [email protected]
http://www-lar.deis.unibo.it/~cmelchiorri
EVOLUZIONE NEL TEMPO EVOLUZIONE NEL TEMPO DI SISTEMI DINAMICIDI SISTEMI DINAMICI
FINEFINE
CONTROLLI AUTOMATICI LS