INTRODUZIONE A RTAI-LINUX - LAR-DEIS Home Page · supporto al C++ (anche in kernel space per kernel...
40
INTRODUZIONE A RTAI INTRODUZIONE A RTAI SISTEMI DI ELABORAZIONE E CONTROLLO M Ingegneria dell'Automazione Ing. Gianluca Palli DEIS - Università di Bologna Tel. 051 2093903 email: [email protected] http://www-lar.deis.unibo.it/~gpalli
Transcript of INTRODUZIONE A RTAI-LINUX - LAR-DEIS Home Page · supporto al C++ (anche in kernel space per kernel...

INTRODUZIONE A RTAIINTRODUZIONE A RTAI
SISTEMI DI ELABORAZIONE E CONTROLLO MIngegneria dell'Automazione
Ing. Gianluca PalliDEIS - Università di Bologna
Tel. 051 2093903email: [email protected]
http://www-lar.deis.unibo.it/~gpalli

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
2Introduzione a RTAIIntroduzione a RTAI
Progetto originale del Politecnico di Milano http://www.aero.polimi.it/~rtai/ http://www.rtai.org/
L'ambiente real time è realizzato tramite moduli kernel: ogni modulo gestisce un particolare servizio; disponibilità di diversi scheduler; possibilità di attivare e disattivare il supporto alle
applicazioni real time; modifica trasparente alle applicazioni non real time.

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
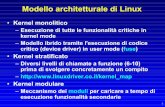
3Architettura di RTAIArchitettura di RTAI Si introduce un nuovo layer tra il kernel Linux e il
sistema hardware: RTHAL (Real-Time Hardware Abstraction Layer)
Permette di catturare facilmente le funzionalità del kernel (interrupts, system calls, timers) per poterle gestire in accordo a politiche real-time
Sostituisce le operazioni sulle strutture originali con operazioni su puntatori RTHAL
I puntatori RTHAL sono modificabili dinamicamente. Se RTAI non è attivo puntano alle strutture originali di Linux, se RTAI è attivo puntano alle strutture del kernel real-time
Linux non ha più il controllo sull’abilitazione/disabilitazione delle interruzioni.

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
4Architettura di RTAIArchitettura di RTAI RTHAL non fornisce servizi real-time: ha la sola
funzione di intercettare le chiamate al kernel Linux Le chiamate sono redirette alle strutture puntate da
RTHAL
RTAI può essere attivato e disattivato a dall'utente perchè è realizzato come un normale modulo kernel Permette di estendere dinamicamente le funzionalità del
kernel senza dover essere caricato al boot del sistema.
RTAI non attivo
Funzionamento normale di Linux
RTAI attivo
Solo funzionalità real-timepossono accedere
direttamente all’hardware
Linux è gestito come un processo a bassa priorità

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
5Architettura di RTAIArchitettura di RTAI
Aggiunge al kernel di Linux le primitive real time Linux (kernel+applicazioni) diventa un processo di RTAI eseguito
quando la CPU non è occupata nell'esecuzioni di processi real time ATTENZIONE!!!: Se i processi real time occupano la CPU al
100%, le applicazioni non real time risulteranno bloccate...
Le primitive originali di Linux (syscall) e gli interrupt vengono filtrati in modo da non disturbare il funzionamento del sistema real time
La programmazione avviene tramite i tools standard di Linux

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
6Caratteristiche di RTAICaratteristiche di RTAI Infrastruttura hard real time sia in kernel space che in user-
space (LXRT): I processi RTAI nativi eseguono in kernel mode: le API
originarie di RTAI sono utilizzabili solo da moduli kernel LXRT permette di sviluppare processi real-time usando le API
RTAI da spazio utente (si è cercato di mantenere simmetria tra le API in spazio kernel e quelle in spazio utente)
programmazione in user space più semplice; implementazione in kernel space più efficiente ma
potenzialmente più pericolosa per il sistema (in spazio kernel si può accedere liberamente alla memoria)
Funzionalità real time avanzate: supporto al C++ (anche in kernel space per kernel 2.4); supporto al calcolo in virgola mobile in kernel space possibilità di backtrace delle applicazioni real time; disponibilità di una interfaccia grafica; ...

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
7Tipologie di scheduler in base all'hardwareTipologie di scheduler in base all'hardware
Uniprocessor Scheduler (UP) Utilizzabile nei sistemi monoprocessore
Symmetric Multiprocessor Scheduler (SMP) In un sistema multiprocessore permette una
distribuzione di carico simmetrica. Ogni processo di default può essere assegnato a
qualsiasi processore; per ottimizzare l’esecuzione è possibile imporre l’esecuzione di un processo su una CPU o su un insieme ristretto di CPU
Multi Uniprocessor Scheduler (MUP) In un sistema multiprocessore impone ad ogni processo
l’esecuzione su una CPU stabilita al momento della sua creazione. Meno flessibile ma più efficiente di SMP

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
8Modalità di esecuzione dello schedulerModalità di esecuzione dello scheduler
Periodic mode Esegue lo scheduler periodicamente al termine di un
periodo prefissato: il timer viene settato una sola volta all’inizio dell’esecuzione
Il periodo dei processi deve essere multiplo esatto del periodo dello scheduler, in caso contrario il periodo dei processi è approssimato al multiplo del periodo dello scheduler più vicino (introduce un jitter di attivazione)
One-shot mode Lo scheduler viene eseguito in maniera non periodica. Il
timer deve essere settato ogni volta in base al processo più prioritario che andrà in esecuzione
Permette una gestione più flessibile delle temporizzazioni di tutti i processi a costo di un maggiore overhead dovuto alla necessità di riprogrammare il timer al termine di ogni periodo

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
9Politiche di SchedulingPolitiche di Scheduling
FIFO Il processo attivo a priorità più alta ottiene il controllo
della CPU fino a quando la rilascia volontariamente oppure diventa attivo un processo a priorità maggiore
Round-Robin (RR) Il processo attivo a priorità più alta ottiene il controllo
della CPU per un determinato intervallo di tempo, al termine del quale il controllo passa ad un altro processo allo stesso livello di priorità (se presente). Un processo può subire preemption da parte di un processo a priorità maggiore
RTAI integra primitive che associate alla politica FIFO permettono una semplice implementazione degli algoritmi di scheduling Rate Monotonic Priority Order ed Earliest Deadline First.

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
10RTAI Inter-Process Communication (IPC)RTAI Inter-Process Communication (IPC)
Real-time fifos Meccanismo di base per scambiare dati in modo
asincrono tra processi real-time e processi Linux non real-time
Shared Memory Condivide aree di memoria tra processi RT e processi
Linux Messages
Possibilità di inviare messaggi sia in maniera asincrona che sincrona (RPC) tra processi RT
Mailboxes Permettono di inviare/ricevere messaggi di qualsiasi
dimensione, ordinati per priorità o per istante di arrivo, tra processi RT e processi Linux
Semaphores Permettono di sincronizzare i processi nell’accesso a
risorse condivise evitando inversioni di priorità incontrollate

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
11
Una semplice applicazione: rt_hello.c
#include <sys/mman.h>
#include <rtai.h>
#include <rtai_sched.h>
#include <rtai_lxrt.h>
#include <rtai_math.h>
int main(void){
RT_TASK *maintask;
RTIME period;
int i;
float sample_time=1.0;
rt_allow_nonroot_hrt();
mlockall(MCL_CURRENT | MCL_FUTURE);
...
Inclusione degli header files
gestione della memoria
definizioni generali di RTAI
RTAI scheduler
supporto user space RT
gestione della FPU
Funzione principale
l'esecuzione del programma inizia dal main()
definizione delle variabili locali
Funzioni di accesso alle risorse
acceso alle primitive real time ad utenti generici (non root)
blocco della memoria per evitare che l'applicazione venga “swappata”
Il primo programma in ambiente RTAI Il primo programma in ambiente RTAI

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
12Il primo programma in ambiente RTAI Il primo programma in ambiente RTAI ...
if( !(maintask = rt_task_init_schmod( nam2num("MAINTASK"), 50, 0, 0, SCHED_FIFO, 0))) {
printf( "CANNOT INIT MAINTASK\n");
exit( -1);
}
rt_task_use_fpu(maintask,1);
rt_make_hard_real_time();
rt_set_oneshot_mode();
start_rt_timer(0);
...
Parte principale del programma:
rt_task_init... inizializzazione del task e inserimento nello scheduler
deve essere inserita in tutti i processi che accedono alle primitive real time
Alcune funzioni accessorie
accesso del task alla FPU
restrizione dell'ambiente alle sole primitive real time
Inizializzazione del timer per la gestione dello scheduler
impostazione della modalità del timer
attivazione del timer alla massima velocità

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
13Il primo programma in ambiente RTAI Il primo programma in ambiente RTAI ...
period=nano2count(sample_time*1E9);
rt_task_make_periodic(maintask,rt_get_time()+period, period);
for(i=0;i<10;i++){
rt_task_wait_period();
printf("Hello World at time %llu !!!\n",
rt_get_time_ns());
}
rt_task_delete(maintask);
return 0;
}
Impostazione della periodicità
conversione del periodo di campionamento in intervalli del timer di sistema
il task viene reso periodico
Chiusura dell'applicazione
cancellazione del task
uscita dal main
Ciclo principale
attesa di attivazione da parte dello scheduler
esecuzione del corpo del programma

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
14Compilazione di rt_hello.cCompilazione di rt_hello.c
In ambiente Linux, il compilatore più diffuso è sicuramente il gcc (GNU Compiler Collection) In realtà non si tratta di un singolo compilatore ma di una
collezione di tool per la creazione degli eseguibili Supporta molti fra i più diffusi linguaggi di programmazione (C, C+
+, Pascal, Java, Fortran, ecc...) Comando per la compilazione:
rtaiuser@rtaibox:~$ gcc rt_hello.c -o rt_hello \
-I/usr/realtime/include -L/usr/realtime/lib \ -llxrt -lpthread -static
l'opzione -I/usr/realtime/include indica al compilatore dove si trovano gli header files di RTAI
l'opzione -L/usr/realtime/lib indica al compilatore dove si trovano le librerie di RTAI
Per approfondimenti sul gcc consultare il manuale (man gcc)

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
15Uso di Uso di make e Makefilemake e Makefile È possibile utilizzare tool per la gestione della
compilazione quali “make“ Utile per gestire progetti di qualsiasi dimensione Utilizzato per la quasi totalità dei software opensource
(compreso il kernel di Linux!!!)
CCFLAGS = -I/usr/realtime/include
LDFLAGS = -L/usr/realtime/lib -llxrt -lpthread -static
default: rt_hello
rt_hello: rt_hello.c Makefilegcc $(CCFLAGS) $(LDFLAGS) -o rt_hello rt_hello.c
clean:rm -rf *.o rt_hello
Variabili d'ambiente
Direttive del make
Direttiva di default
Compilazione del programma
Pulizia della directory di compilazione
Per la compilazione basta lanciare il comando “make”

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
16Esecuzione di rt_helloEsecuzione di rt_hello
Caricamento dei moduli per la gestione dei processi realtime (realtime scheduler)root@rtaibox:~$ modprobe rtai_sched
per approfondimenti consultare i manuali (man modprobe)
per eseguire questo comando è necessario possedere i diritti di superutente
Esecuzione del programma:rtaiuser@rtaibox:~$ ./rt_hello
esaminare i messaggi del kernel con il comando dmesg verificare cosa cambia togliendo dal codice l'istruzione rt_task_make_hard_hrt();
Problema: l'istruzione printf()non è studiata per funzionare in modalità real time: il kernel segnala che non è possibile gestire questa istruzione
mantenendo il task in hard real time cambio di modalità forzato

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
17
Soluzione: si delegano le operazioni non real time ad un secondo processo (non real time) necessari meccanismi di comunicazione fra i due processi
uso di FIFO real time (eseguire modprobe rtai_fifos)
Il programma rt_hello.c viene modificato nel seguente modo: ...
#include <rtai_fifos.h>
#define FIFODIM 128
#define DEBUGFIFO 1
...
char buf[FIFODIM];
...
rtf_create(DEBUGFIFO,sizeof(char)*FIFODIM*10);
for(i=0;i<10;i++){
rt_task_wait_period();
sprintf(buf,”Hello World at time %lld !!!\n",
rt_get_time_ns());
rtf_put(DEBUGFIFO,buf,FIFODIM);
}
...
gestione delle comunicazioni
creazione della fifo real time per lo scambio dei messaggi fra i due processi
scrittura dei messaggi sulla fifo
Stampa di messaggi a videoStampa di messaggi a video

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
18
Ora tutte le istruzioni vengono eseguite in modalità hard real time la funzione sprintf() non effettua chiamate di sistema percui non
causa problemi alle applicazioni real time Il secondo processo accede alla FIFO per la lettura dei messaggi
int main(void){
char buf[ 128];
int len;
if((fd_debug = open(“/dev/rtf1”, O_RDONLY))==-1) {
printf("Error opening fifo: %i\n",fd_debug);
exit(-1);
}
while(1) {
if( 0 > (len = read( fd_debug, buf, 128))) return 0;
buf[ len] = “\0”;
printf( "%s", buf);
}
close( fd_debug);
return 0;
}
gestione delle comunicazioni
apertura della FIFO in sola lettura
lettura dei messaggi dalla FIFO
scrittura dei messaggi a video
chiusura della FIFO
Stampa di messaggi a videoStampa di messaggi a video

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
19Stampa di messaggi a videoStampa di messaggi a video Uso dei thread per la cattura dei messaggi di debug...
#include <pthread.h>
...
void *debug_logging(void *p){
...
close( fd_debug);
}
Definizione della funzione di gestione del thread
i parametri e il valore ritornato dalla funzione devono essere necessariamente di questo tipo
Il corpo della funzione rimane inalterato
è stata rimossa l'istruzione return()
Creazione del thread all'interno del main...
int main(void){
...
pthread_t debug_thread;
...
if(pthread_create( &thread1, NULL, debug_logging, (void *) NULL)!=0){
printf(“main: Unable to create debug_thread\n”);
exit(-1);}
...
}
Generazione del thread
definizione della struttura che contiene i parametri del thread
generazione del thread

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
20RTAI LXRTRTAI LXRT Cosa deve fare un processo LXRT per funzionare
correttamente?
Settare la sua politica di scheduling a FIFO Permette di avere una modalità di funzionamento “soft real-time”
anche mentre lavora come processo Linux standard: migliori performance
È possibile utilizzare le system calls native di Linux
Creare il collegamento con un agente real-time L’agente creato in spazio kernel gestirà le system calls rese
disponibili da RTAI
Prima di entrare in modalità hard real-time occorre disabilitare la paginazione delle memoria RAM Il funzionamento real-time non può essere interrotto da accessi
su disco in maniera non deterministica Codice e dati del processo sono mantenuti in RAM

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
21RTAI LXRTRTAI LXRT
Attivare la modalità di funzionamento hard real-time Il processo viene tolto dalla running-queue di Linux e viene
schedulato dallo scheduler RTAI I processi Linux vengono eseguiti solo se non c’è nessun
processo schedulato dallo scheduler RTAI in esecuzione
Esecuzione di codice real-time
Ritorno alla modalità soft real-time Il processo è riportato nella coda dei processi pronti dello
scheduler Linux
Prima di terminare l’esecuzione occorre eliminare l’agente RTAI relativo al processo in esecuzione

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
22RTAI LXRT APIRTAI LXRT API #include <rtai_lxrt.h>
void rt_allow_nonroot_hrt(); Consente di effettuare operazioni normalmente permesse solo ad
utenti con privilegi di root
RT_TASK* rt_task_init(<name>, <priorità>, 0, 0); Crea un agente real-time relativo al processo chiamante. La
priorità definita dalla funzione riguarda l’esecuzione gestita dallo scheduler RTAI
RT_TASK* rt_task_init_schmod(<name>, <priorità>, 0, 0,<policy>,<fpu>); Come rt_task_init ma imposta anche l'algoritmo di scheduling
Linux e l'uso della FPU
int rt_task_delete(RT_TASK*); Elimina un processo RTAI creato con rt_task_init(...)
void* rt_get_adr(<name>); Restituisce l’indirizzo dell’oggetto di nome <name>

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
23RTAI LXRT APIRTAI LXRT API
int rt_task_make_periodic(RT_TASK*, <start_time>, <period>); Rende un processo periodico ed avvia l'esecuzione all’istante <start_time>
void rt_task_wait_period(); Sospende il processo fino all’inizio del periodo successivo
void rt_set_oneshot_mode(); Imposta lo scheduler in One-shot mode
void rt_set_periodic_mode(); Imposta lo scheduler in Periodic mode
RTIME start_rt_timer(<period>); Fa partire il timer con risoluzione <period>. In modalità one-shot <period>
non ha importanza: la risoluzione del timer è quella del clock di RTAI
void stop_rt_timer();
int rt_thread_create(<func*>,<args*>, <stack_size>);

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
24RTAI LXRT APIRTAI LXRT API RTIME nano2count(<nanoseconds>);
Converte il tempo da ns a numero di ticks del clock interno
RTIME rt_get_time_ns(); Restituisce il tempo in ns da quando è stato fatto partire il timer
void rt_busy_sleep(<nanoseconds>); Ritarda l’esecuzione del processo senza perdere l’uso della CPU:
simula l’utilizzo della CPU per <nanoseconds> ns
void rt_make_hard_real_time(); Forza l’esecuzione del processo in modalità hard real-time
permettendo full-preemption del sistema
void rt_make_soft_real_time(); Ritorna alla modalità non real-time restituendo il controllo a
scheduler e kernel di Linux
int rtai_print_to_screen(...); Funzione di visualizzazione da utilizzare in modalità hard real-time

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
25RTAI: modulo kernel rt_hello_km.c RTAI: modulo kernel rt_hello_km.c #include <rtai.h>#include <rtai_sched.h>...RT_TASK task;...void task_routine() { while(1) { /* Codice real-time */ rt_task_wait_period();
rt_printk("Hello World at \\ time %llu !!!\n", rt_get_time_ns());
}}...int init_module(void) {... rt_task_init(&task, task_routine, 0, stack_size, priority, 0, 0); timer_period = start_rt_timer(nano2count(1e9)); task_period = 2*timer_period; rt_task_make_periodic(&task, now, task_period);}void cleanup_module(void) { rt_task_delete(&task); stop_rt_timer();}
Thread real-time
Ciclo infinito
Periodico
Generazione del thread
definizione dei parametri del thread
generazione del thread
Chiusura del modulo

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
26Compilazione dei moduli kernel: Linux 2.6Compilazione dei moduli kernel: Linux 2.6 Uso di make e Makefile
#MakefileKERNEL_SOURCE = /usr/src/linux
EXTRA_CFLAGS= -ffast-math -mhard-float -I/usr/realtime/include -I$(KERNEL_SOURCE)/include -I$(KERNEL_SOURCE)/include/asm-i386/mach-default -I/usr/include
EXTRA_LDFLAGS= -L/usr/realtime/lib -lmath -static
obj-m := rt_hello_km.o
default: rt_hello_km
rt_hello_km: rt_hello_km.c Makefilemake -C ${KERNEL_SOURCE} SUBDIRS=`pwd` modules
clean: make -C ${KERNEL_SOURCE} SUBDIRS=`pwd` clean
Variabili d'ambiente
Sono necessari almeno header e configurazione del kernel corrente
Direttive del make
Indicazione del modulo da generare
Direttiva di default
Compilazione del modulo
Pulizia della directory di compilazione

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
27RTAI APIRTAI API
Diversa chiamata alle funzioni di generazione del task
int rt_task_init(RT_TASK*, <funzione>, <data>, <stack_size>, <priorità>, 0, 0); Crea un processo real-time task di priorità <priorità> <funzione> indica la funzione da cui task inizia l’esecuzione RT_TASK è la struttura dati che identifica un processo RTAI Solo in kernel mode
Analoga differenza per altre funzioni quali rt_sem_int, rt_mbx_int, and rt_cond_init ...

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
28Considerazioni su Missed DeadlineConsiderazioni su Missed Deadline
Non si ha nessuna segnalazione di fault(politica As Soon As Possible Execution)
Se il processo continua ad essere prioritario prosegue nell’esecuzione
Politiche di rilevazione e di reazione ad un evento missed deadline sono lasciate al programmatore Skip Next Execution Policy: nei processi periodici viene
annullata l’esecuzione nel periodo successivo a quello in cui è avvenuta la situazione di overrun

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
29Gestione HW del tempoGestione HW del tempo RTAI supporta tre timer hardware:
Real Time Clock (RTC) Ha una risoluzione bassa (fino a 8192 Hz) e può essere
programmato solo in modalità periodica con frequenze potenze di 2 Hz
Non interferisce con i timer di Linux È disponibile anche nei PC più “datati” ed in molti sistemi
embedded
PIT 8254 e APIC (IA-32) / Decrementer (PowerPC) Hanno una risoluzione più elevata e non hanno il vincolo delle
“potenze di 2Hz” e possono essere programmati sia in modalità periodica che in modalità oneshot
La lettura del PIT è lenta (bus ISA), l’APIC non è presente in tutte le CPU
Sono utilizzati anche da Linux

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
30Modalità di gestione del tempoModalità di gestione del tempo
Periodic Mode: la temporizzazione dei task è a frequenza fissa La frequenza impostabile (e la risoluzione temporale) dipende dal dispositivo di clock utilizzato Le decisioni di scheduling sono prese (principalmente)
allo scadere del tick Il tick successivo è automaticamente (via hardware)
reimpostato La funzione start_rt_timer() consente di impostare la
frequenza di tick desiderata Se l’unico dispositivo di clock è l’RTC, questa è l’unica
modalità disponibile
Le decisioni di scheduling sono sia clock driven, sia event driven

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
31Modalità di gestione del tempoModalità di gestione del tempo
Oneshot Mode: la temporizzazione dei task è a frequenza variabile Come nella modalità periodica, la frequenza e la
risoluzione dipendono dal clock device Le decisioni di scheduling vengono prese ad istanti
temporali variabili: Nel momento in cui un task oneshot viene messo in esecuzione,
il tick timer è impostato per scadere a: now() + resume_time resume_time è il primo tempo di risveglio di un task a priorità
maggiore (o uguale) del task corrente
Le decisioni di scheduling sono solo event driven! Il tick è un evento dinamico

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
32Problemi architetturaliProblemi architetturali
Su architetture x86, la presenza dell’APIC implica lapresenza del Time Stamp Counter (TSC) Il TSC è un contatore monotono ad elevata precisione
(BusFreq) La modalità oneshot in RTAI fa uso sia del TSC sia
dell’APIC: Lettura veloce del TSC, risoluzione temporale elevata Programmazione veloce della prossima scadenza mediante
timer APIC È necessario prestare attenzione in ambiente MP in quanto il
TSC è un registro per-CPU
L’utilizzo del PIT 8254 in modalità oneshot introduce un jitter più elevato (e la lettura è più lenta)

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
33Punti di attivazione dello schedulerPunti di attivazione dello scheduler Lo scheduler di RTAI sia è clock driven che event driven
Il meccanismo di scheduling viene attivato: alla ricezione di un timer interrupt (clock tick, periodico o
oneshot) all’uscita di una routine di gestione interrupt (ISR) alla sospensione spontanea di un task
Le principali operazioni effettuate sono: Aggiornamento degli slice temporali (politica Round-Robin) Risveglio dei task scaduti od in scadenza (timing oneshot) Selezione del task READY di priorità massima (O(1), è il
task successivo la testa della lista) Eventuale task switching (potrebbe non essere necessario
se il task corrente è quello di massima priorità) Regolazione del timer per il clock tick successivo (timing
oneshot)

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
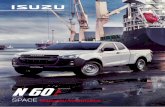
34Scheduling RM in RTAIScheduling RM in RTAI Rate Monotonic
È di facile realizzazione a partire dallo scheduling FIFO
Occorre determinare le priorità dei processi in funzione della loro frequenza di attivazione
Se non si vuole implementare l’intero meccanismo manualmente RTAI mette a disposizione una primitiva che determina la priorità dei processi real-time presenti nel sistema in funzione del periodo impostato con rt_task_make_periodic(...)
void rt_spv_RMS(<cpu>); Setta la priorità dei processi RTAI che eseguono sul processore
<cpu> in maniera inversamente proporzionale al loro periodo di attivazione

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
35Scheduling RM in RTAIScheduling RM in RTAI
Creare un processo figlio fork();
Creare i processi real-time definendone le priorità (anche se saranno sovrascritte) rt_task_init(nam2num(“TaskHF”), LOW_PR, 0, 0); rt_task_init(nam2num(“TaskLF”), HIGH_PR, 0, 0);
Entrare in modalità real-time rt_make_hard_real_time();
Rendere i processi periodici rt_task_make_periodic(taskHighFrequency, now + ...,
SHORT_PERIOD_COUNT); rt_task_make_periodic(taskLowFrequency, now + ...,
LONG_PERIOD_COUNT);
Settare le priorità in modo inversamente proporzionale alla durata del periodo rt_spv_RMS(0);

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
36Scheduling RM in RTAIScheduling RM in RTAI

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
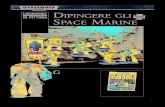
37Scheduling EDF in RTAIScheduling EDF in RTAI Earliest Deadline First
Si ottiene a partire dall’algoritmo di scheduling FIFO
Occorre eseguire il processo pronto che deve terminare prima RTAI semplifica l’uso di questa politica di scheduling rendendo
disponibile una funzione che rende possibile l’esecuzione del processo con deadline più imminente
void rt_task_set_resume_end_times(<resume>, <end>); Imposta gli istanti assoluti di resume e deadline di un processo.
Esso viene deschedulato ed al risveglio è inserito nella coda dello scheduler in posizione dipendente dall’istante assoluto entro cui deve terminare
Non è specificata alcuna periodicità, ma è possibile definire un istante di resume relativo a quello precedente e deadline relativa al resume ottenuto indicando valori negativi di <resume> e <end>

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
38Scheduling EDF in RTAIScheduling EDF in RTAI Creare un processo figlio
fork(); Creare un agente real-time per ogni processo
rt_task_init(nam2num(“Task1”), LOW_PR, 0, 0); rt_task_init(nam2num(“Task2”), HIGH_PR, 0, 0);
Entrare in modalità real-time rt_make_hard_real_time();
Rendere i processi periodici rt_task_make_periodic(task1, now + ..., PERIOD_1); rt_task_make_periodic(task2, now + ..., PERIOD_2);
Settare gli istanti di attivazione e di deadline per ogni processo rt_task_set_resume_end_times(now + ..., -REL_DEADL_1); rt_task_set_resume_end_times(now + ..., -REL_DEADL_2);
Un processo al termine di ogni suo job deve risettare i propri istanti di attivazione e di deadline rt_task_set_resume_end_times(-PERIOD_n,-REL_DEADL_n);

Gianluca Palli SISTEMI DI ELABORAZIONE E CONTROLLO M A.A. 2010/2011
39Scheduling EDF in RTAIScheduling EDF in RTAI

INTRODUZIONE A RTAIINTRODUZIONE A RTAIFINEFINE
SISTEMI DI ELABORAZIONE E CONTROLLO MIngegneria dell'Automazione
Ing. Gianluca PalliDEIS - Università di Bologna
Tel. 051 2093903email: [email protected]
http://www-lar.deis.unibo.it/~gpalli