Controllo con retroazione dello stato - LAR-DEIS Home Page · 600 800 To: Out(1) 0 20 40 60 80 To:...
39
Prof. Claudio Melchiorri DEIS-Università di Bologna Tel. 051 2093034 e-mail: [email protected] http://www-lar.deis.unibo.it/people/cmelchiorri Controllo con retroazione Controllo con retroazione dello stato dello stato CONTROLLI AUTOMATICI LS Ingegneria Informatica
Transcript of Controllo con retroazione dello stato - LAR-DEIS Home Page · 600 800 To: Out(1) 0 20 40 60 80 To:...

Prof. Claudio Melchiorri
DEIS-Università di Bologna
Tel. 051 2093034
e-mail: [email protected]
http://www-lar.deis.unibo.it/people/cmelchiorri
Controllo con retroazione Controllo con retroazione dello statodello stato
CONTROLLI AUTOMATICI LSIngegneria Informatica

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
2Controllo con retroazione dello statoControllo con retroazione dello statoLegge di controllo
In catena aperta: legge di controllo predeterminata in funzione delle condizioni iniziali e finali dello stato e del modello del sistemaIn retroazione: legge di controllo che tiene in conto, istante per istante, dell’andamento dello stato del sistema
Controllo in retoazioneRetroazione dinamica: azione di controllo calcolata sulla base dello stato da un dispositivo avente dinamica propriaRetroazione statica: azione di controllo calcolata sulla base dello stato mediante una relazione algebrica
Obiettivi del controlloProblemi di regolazione: si vuole (ri)portare lo stato del sistema a “0” (effetto di disturbi o errori) con velocità assegnataProblemi di asservimento (tracking): si vuole che l’uscita del sistema approssimi, secondo certi criteri, un andamento desiderato
Caso sviluppato nel seguito: retroazione statica per problemi di regolazione
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
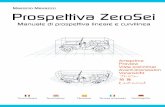
3Controllo con retroazione dello statoControllo con retroazione dello statoSi consideri il sistema lineare stazionario (tempo continuo o tempo discreto) e si supponga che tutte le componenti del vettore di stato siano direttamente accessibili
Si consideri la legge di controllo
u x y
K
v

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
4Controllo con retroazione dello statoControllo con retroazione dello statoApplicando la legge di controllo si ottiene
N.B. una possibilità alternativa di controllo è quella che si ottiene effettuando una retroazione dall’uscita y(t) anziché dallo stato x(t).
Per sistemi ad un ingresso ed una uscita (m = p = 1), K1 è uno scalare, mentre K (retr. dello stato) è un vettore di n componenti.Vi sono quindi più gradi di libertà nella definizione della legge di controllo e quindi in generale sarà possibile ottenere prestazioni migliori (maggiori possibilità di modifiche della dinamica del sistema)
u x y
K1
v

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
5Controllo con retroazione dello statoControllo con retroazione dello statoProprietà di invarianza con retroazione dello stato
Se Sk è il sistema ottenuto da S mediante retroazione dello stato, allora i sottospazi di raggiungibilità dei due sistemi coincidono
Gli autovalori del sottospazio non raggiungibile non cambiano. Lo sivede mettendo S in forma standard di raggiungibilità. Ponendo K = [K1 K2] si ottiene facilmente per il sistema controllato:
N.B. = Dimensione sottospazio raggiungibile

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
6Forma canonica di controlloForma canonica di controlloSi consideri il sistema lineare stazionario S = (A, b, C, d) ad un solo ingresso
Proprietà. Il sistema S è raggiungibile se e solo se è equivalente ad un sistema Sc = (Ac, bc, Cc, dc) in forma canonica di controllo (o di raggiungibilità), cioè un sistema in cui le matrici Ac e bc hanno la struttura
dove gli αi sono i coefficienti del polinomio caratteristico monico della matrice A

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
7Forma canonica di controlloForma canonica di controlloOsservazione: anche se l’ingresso “entra” solo nell’ultima componente del vettore x, la struttura di A fa sì che sia possibile “agire” su tutto il vettore x:
- --
-
+ …
…

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
8Forma canonica di controlloForma canonica di controlloLa matrice di trasformazione T che permette di passare in forma canonica di controllo xc = T x è definita come
Dove:P1 è la matrice di raggiungibilità del sistema S: P1=[b, Ab, A2b, …, An-1b]P1C è la matrice di raggiungibilità del sistema SC : P1=[bC , AC bC , AC
2bC , …, ACn-1bC ]
(P1C)-1 ha la struttura
αi : coeff. del polinomio caratteristico monico della matrice A

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
9Forma canonica di controlloForma canonica di controlloEsempio
In forma di controllabilità:Coeff. del polinomio caratteristico
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
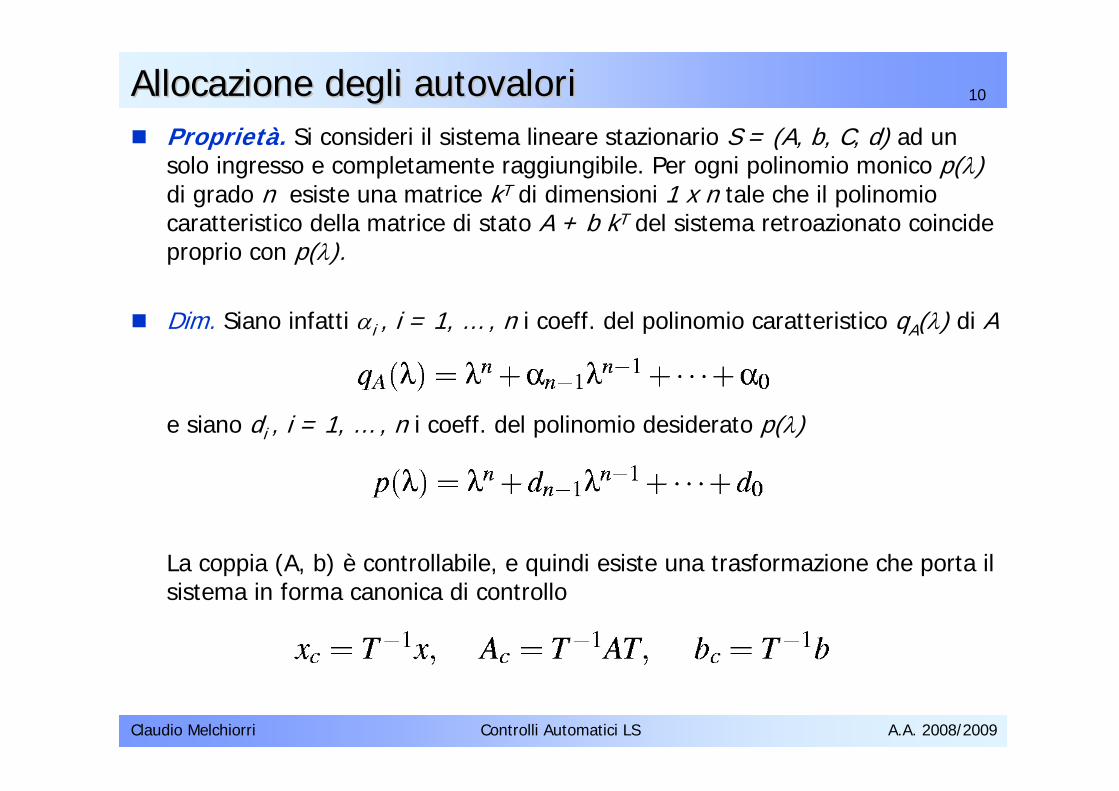
10Allocazione degli Allocazione degli autovaloriautovaloriProprietà. Si consideri il sistema lineare stazionario S = (A, b, C, d) ad un solo ingresso e completamente raggiungibile. Per ogni polinomio monico p(λ) di grado n esiste una matrice kT di dimensioni 1 x n tale che il polinomio caratteristico della matrice di stato A + b kT del sistema retroazionato coincide proprio con p(λ).
Dim. Siano infatti αi , i = 1, … , n i coeff. del polinomio caratteristico qA(λ) di A
e siano di , i = 1, … , n i coeff. del polinomio desiderato p(λ)
La coppia (A, b) è controllabile, e quindi esiste una trasformazione che porta il sistema in forma canonica di controllo
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
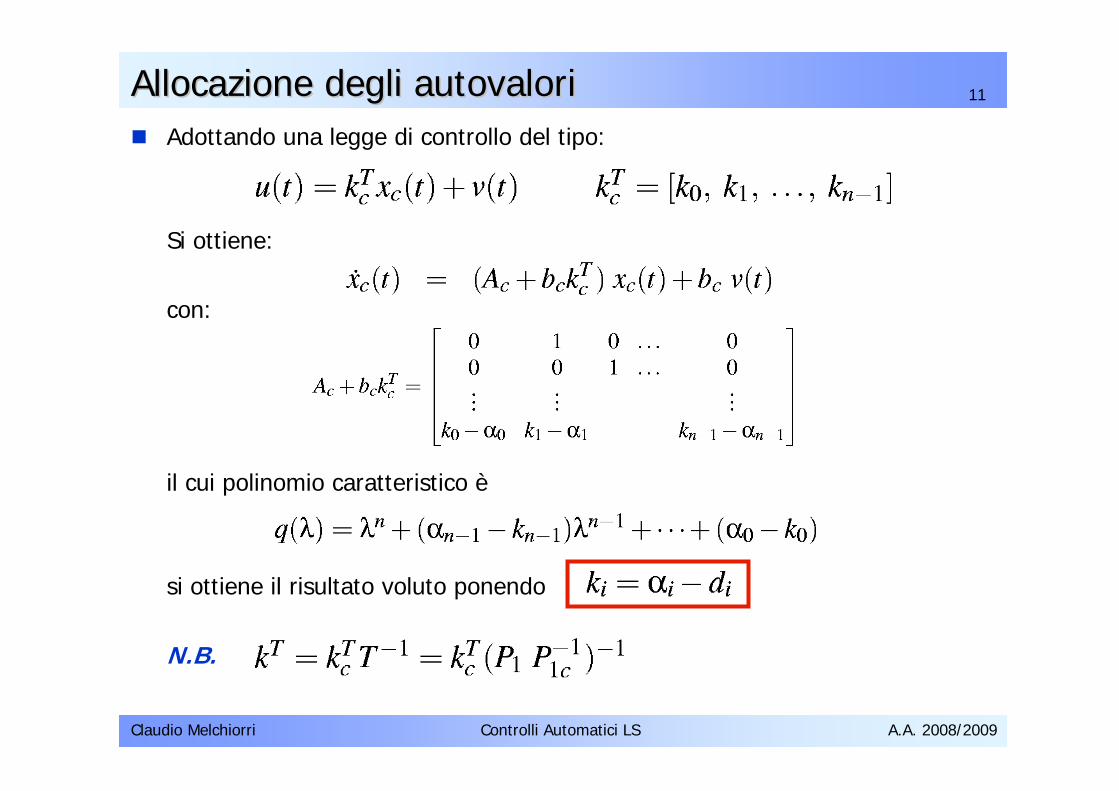
11Allocazione degli Allocazione degli autovaloriautovaloriAdottando una legge di controllo del tipo:
Si ottiene:
con:
il cui polinomio caratteristico è
si ottiene il risultato voluto ponendo
N.B.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
12Allocazione degli Allocazione degli autovaloriautovaloriEsempio: calcolare la matrice dei guadagni della retroazione statica dello stato u(t) = kTx(t) che posizioni in -1, -2, -2 gli autovalori del sistema complessivo.
Il sistema è completamente raggiungibile in quanto rank(P1) = 3Il polinomio caratteristico di A e quello desiderato sono rispettivamente
Da cui

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
13Allocazione degli Allocazione degli autovaloriautovaloriIl vettore kT si ottiene da
dal pol. caratt. di A

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
14Allocazione degli Allocazione degli autovaloriautovaloriVerifica:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
15Allocazione degli Allocazione degli autovaloriautovalori
Comportamento instabile degli stati
Comportamento stabile degli stati
0
0.1
0.2
0.3
0.4
To: O
ut(1
)
-0.3
-0.2
-0.1
0
0.1
To: O
ut(2
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.2
-0.1
0
0.1
0.2
To: O
ut(3
)
Step Response
Time (sec)
Am
plitu
de
0
200
400
600
800
To: O
ut(1
)
0
20
40
60
80
To: O
ut(2
)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
20
40
60
80
To: O
ut(3
)
Step Response
Time (sec)
Am
plitu
de
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
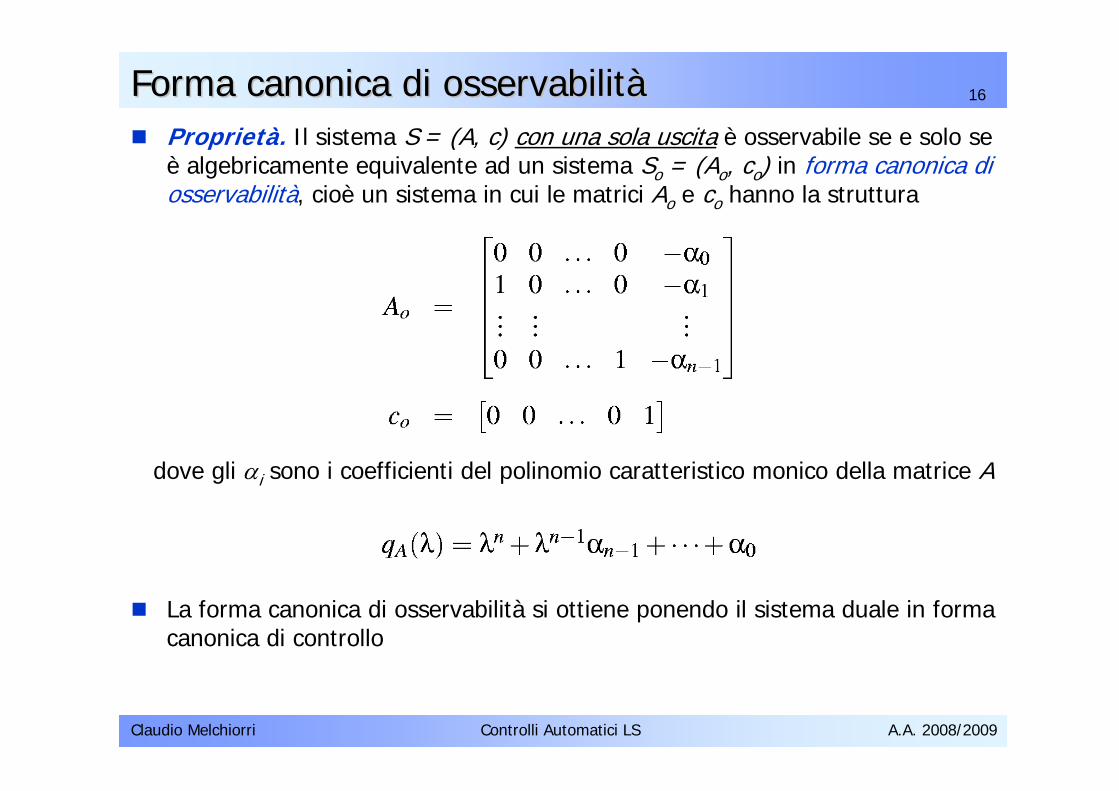
16Forma canonica di osservabilitForma canonica di osservabilitààProprietà. Il sistema S = (A, c) con una sola uscita è osservabile se e solo se è algebricamente equivalente ad un sistema So = (Ao, co) in forma canonica di osservabilità, cioè un sistema in cui le matrici Ao e co hanno la struttura
dove gli αi sono i coefficienti del polinomio caratteristico monico della matrice A
La forma canonica di osservabilità si ottiene ponendo il sistema duale in forma canonica di controllo

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
17Forma canonica di osservabilitForma canonica di osservabilitààLe matrici di osservabilità P2 e P2o del sistema originale e di quello in forma canonica di osservabilità sono legate dalla relazione
Ove T è la matrice di trasformazione x = T xo che porta il sistema originario in forma canonica di osservabilità.
N.B.:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
18Stimatore dello statoStimatore dello stato
Se lo stato del sistema non è noto, o direttamente accessibile per la misura, occorre progettare un “dispositivo” che consente di conoscere la sua evoluzione x(t) sulla base della conoscenza delle condizioni iniziali, dell’ingresso (e dell’uscita) del sistema.
Tale “dispositivo” prende il nome di stimatore (o osservatore) dello stato.
Vi sono stimatori:in catena aperta - basati sulla conoscenza delle cond. iniziali e dell’ingressoin catena chiusa – che sfruttano anche la conoscenza dell’uscitadi ordine ridotto – che non forniscono stime “ridondanti” dello stato x(t)
u x y
K
v
??

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
19Stimatore dello stato Stimatore dello stato –– catena apertacatena apertaLo stimatore in catena aperta è una “copia” del sistema:
Le equazioni dello stimatore in catena aperta sono
Se si definisce l’errore di stima come
(A, B)
(A, B)
Cu y
La dinamica dell’errore dipende dagli autovalori di A:- se il sistema è instabile, la stima diverge- non si può influire sulla velocità di convergenza a zero
Sistema “fisico”(reale)
Modello matematico(simulato)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
20Stimatore dello stato Stimatore dello stato –– catena apertacatena aperta
xo
To Workspace2
t
To Workspace1
x
To Workspace
x' = Ax+Buy = Cx+Du
State-Space1
x' = Ax+Buy = Cx+Du
State-SpacePulseGenerator
Clock
0 2 4 6 8 10 12-1.5
-1
-0.5
0
0.5
1
1.5
2Andamento degli stati
0 2 4 6 8 10 12-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Andamento dell`errore di stima
Non conosco lo stato iniziale
Osservatore:“copia” del sistema

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
21Stimatore dello stato Stimatore dello stato –– catena apertacatena aperta
xo
To Workspace2
t
To Workspace1
x
To Workspace
x' = Ax+Buy = Cx+Du
State-Space1
x' = Ax+Buy = Cx+Du
State-SpacePulseGenerator
Clock
0 2 4 6 8 10 12-14
-12
-10
-8
-6
-4
-2
0
2Andamento degli stati
0 2 4 6 8 10 12-1.5
-1
-0.5
0
0.5
1Andamento dell`errore di stima
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
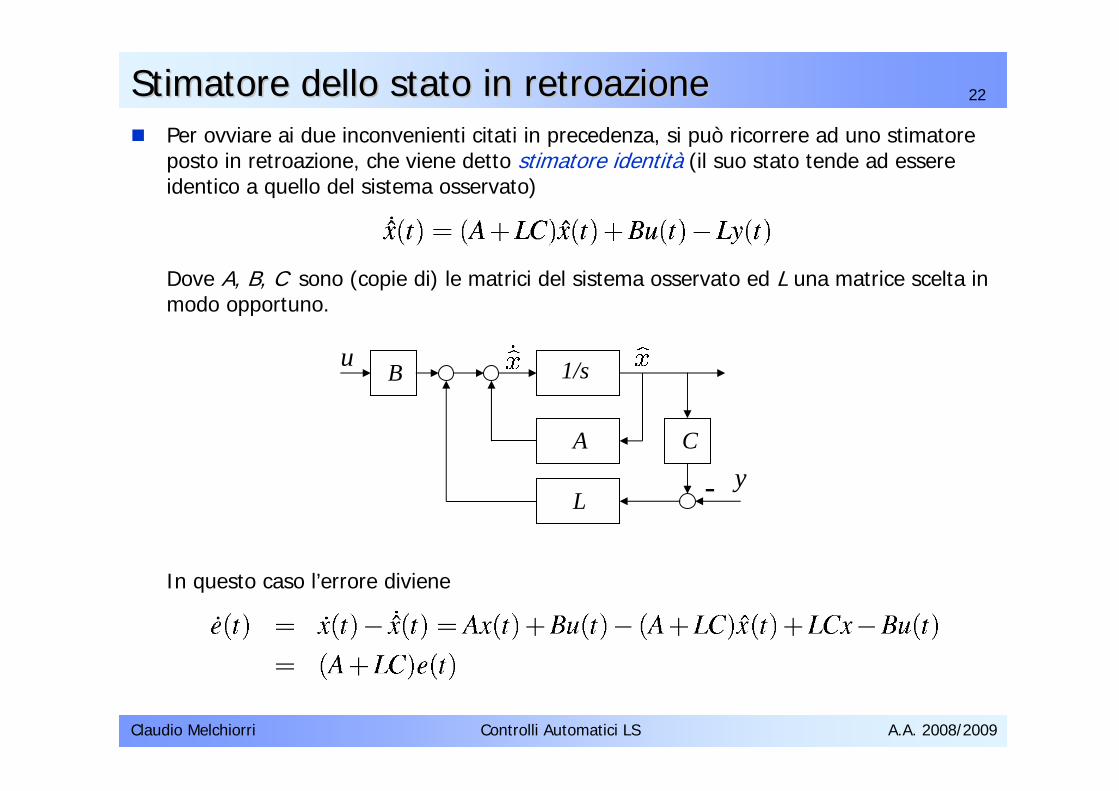
22Stimatore dello stato in retroazioneStimatore dello stato in retroazionePer ovviare ai due inconvenienti citati in precedenza, si può ricorrere ad uno stimatore posto in retroazione, che viene detto stimatore identità (il suo stato tende ad essere identico a quello del sistema osservato)
Dove A, B, C sono (copie di) le matrici del sistema osservato ed L una matrice scelta in modo opportuno.
In questo caso l’errore diviene
u
A
1/s
yL
C
B
-

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
23Stimatore dello stato in retroazioneStimatore dello stato in retroazione
La dinamica dell’errore è definita dagli autovalori della matrice (A+LC)
Per le proprietà dei sistemi duali, il polinomio caratteristico della matrice (A+LC) può essere assegnato arbitrariamente se e solo se la coppia (AT, CT) è completamente raggiungibile, ovvero se e solo se la coppia (A, C) è completamente osservabile.
Per calcolare la matrice L, si considera la coppia (AT, CT) e si procede adottando le tecniche viste per l’allocazione degli autovalori nel caso di sistemi raggiungibili, ottenendo in questo modo la matrice LT.
Se la coppia (A, C) non è osservabile, la dinamica dell’errore di stima caratterizzata da (A+LC) ha dei modi fissi, sui quali non si può agire in alcuna maniera. In questi casi, la sintesi di uno stimatore asintotico dello stato è possibile solo se la parte non osservabile del sistema è asintoticamente stabile.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
24Stimatore dello stato in retroazioneStimatore dello stato in retroazione
Nella esposizione fatta per la sintesi dello stimatore, dato un sistema S di ordine n si definisce un secondo sistema dinamico Ss (lo stimatore) di ordine n ottenendo quindi un sistema “complessivo” di ordine 2n.
In genere, parte del vettore di stato può essere noto analizzando l’uscita y = C x, se la matrice C è nota.
Si può quindi pensare di definire uno stimatore che stimi le sole componenti non note del vettore di stato x: stimatore di ordine ridotto.
u S(n)
So(n)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
25Stimatore dello stato in retroazioneStimatore dello stato in retroazione
x
To Workspace4
x1
To Workspace3
xo
To Workspace2
t
To Workspace1
y
To Workspacex' = Ax+Buy = Cx+Du
State-Space2
x' = Ax+Buy = Cx+Du
State-Space1
x' = Ax+Buy = Cx+Du
State-SpacePulseGenerator
K*u
MatrixGain
Clock
0 2 4 6 8 10 12-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Andamento dell`errore di stima
0 2 4 6 8 10 12-1.5
-1
-0.5
0
0.5
1
1.5
2Andamento degli stati
Stimatore in catena aperta
Stimatore in retroazione
Stato
Uscita
Stato stim. retr.
Stato stim. c.a.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
26Stimatore dello stato in retroazioneStimatore dello stato in retroazione
x
To Workspace4
x1
To Workspace3
xo
To Workspace2
t
To Workspace1
y
To Workspacex' = Ax+Buy = Cx+Du
State-Space2
x' = Ax+Buy = Cx+Du
State-Space1
x' = Ax+Buy = Cx+Du
State-SpacePulseGenerator
K*u
MatrixGain
Clock
Stimatore in catena aperta
Stimatore in retroazione
Stato
Uscita
Stato stim. retr.
Stato stim. c.a.
0 2 4 6 8 10 12-1.5
-1
-0.5
0
0.5
1Andamento dell`errore di stima
0 2 4 6 8 10 12-14
-12
-10
-8
-6
-4
-2
0
2Andamento degli stati

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
27Sintesi del regolatoreSintesi del regolatoreSi definisce regolatore il sistema composto dalla serie dello stimatore dellostato e dell’elemento statico di retroazione K
v
A
I/s
L
CB
u
A
I/sy
K
CB
-
Sistema
Stimatore

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
28Sintesi del regolatoreSintesi del regolatoreLe equazioni del sistema complessivo sono
Da cui con semplici passaggi si ottiene

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
29Sintesi del regolatoreSintesi del regolatoreQueste equazioni si possono raggruppare in forma matriciale in un sistema di ordine 2n, definito come
Allo scopo di evidenziare alcune proprietà di questo sistema, si applica una trasformazione di stato definita come

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
30Sintesi del regolatoreSintesi del regolatoreSi noti che la trasformazione appena introdotta
genera un vettore di stato x’ che ha come prima componente lo stato del sistema originale e come seconda componente la differenza tra x e la suastima (errore di stima).
Per quanto riguarda le matrici, si ottiene:

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
31Sintesi del regolatoreSintesi del regolatoreSi noti che la presenza dello stimatore non altera la relazione ingresso-uscitadel sistema: la matrice di trasferimento complessiva del sistema non cambia utilizzando una retroazione dello stato x anziché lo stato stimato.
Da
Si ha che
Non dipende dallo stimatore!

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
32ProprietProprietàà di separazionedi separazione
Si è visto che nel progetto di un controllo con retroazione del vettore di stato x è possibile effettuare l’allocazione degli autovalori del sistema dalla relazione (A + BK), agendo sulla sola parte raggiungibile.
Si può analogamente dimostrare che, se una misura diretta dello stato non èpossibile, si può progettare uno stimatore con dinamica arbitraria definendo opportunamente gli autovalori di (A+LC), ed agendo sulla parte osservabile.
Si è infine visto che, in casi in cui sia necessario utilizzare uno stimatore per ottenere lo stato (una sua stima) x da utilizzare nel controllo, la definizione dello stimatore non influisce sul progetto del regolatore (e viceversa).

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
33ProprietProprietàà di separazionedi separazioneVale una proprietà di separazione. La sintesi di:
Blocco di regolazione, cioè l’allocazione degli autovalori di (A+BK)Blocco di stima dello stato, cioè l’allocazione degli autovalori di (A+LC)
può essere fatta in modo indipendente.
Vale infatti la proprietà
Quindi gli autovalori del controllore e dello stimatore possono essere allocati indipendentemente.

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
34Sintesi del regolatoreSintesi del regolatoreEsempio: controllo della posizione di un’asta verticale
Stato: angolo θ dell’asta e sua velocità
Uscita: angolo θ
Linearizzando nel punto di equilibrio:
M
? ?
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
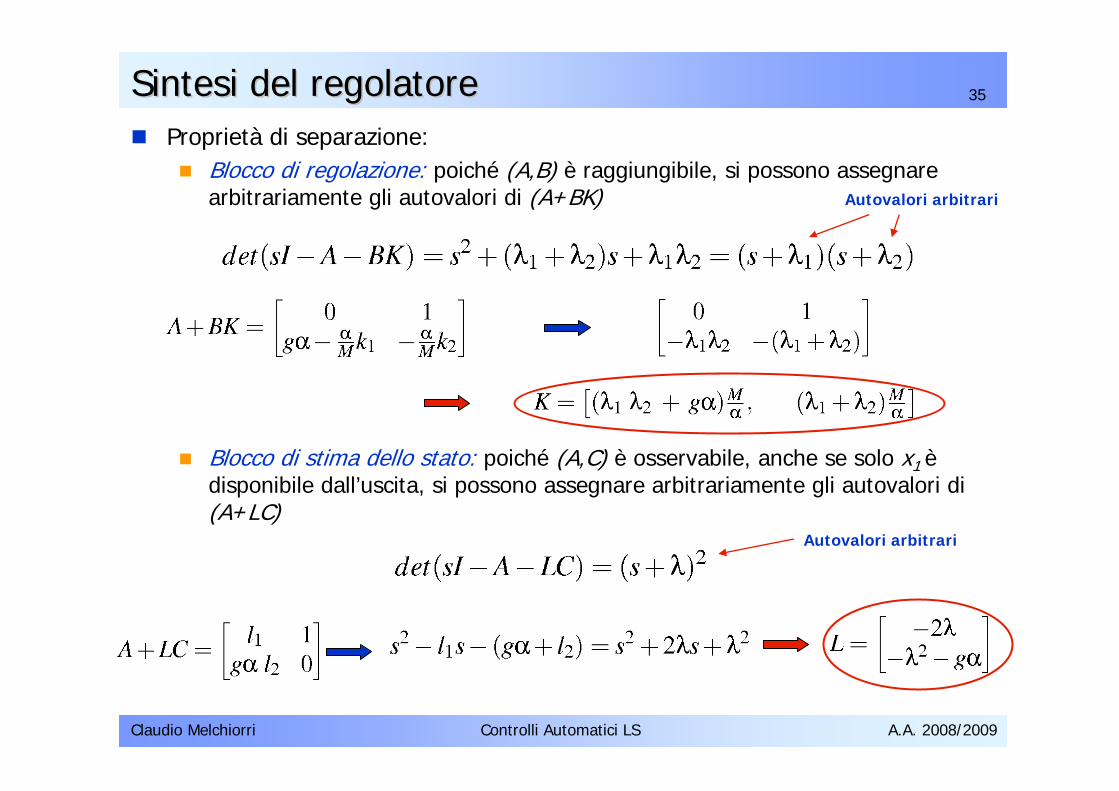
35Sintesi del regolatoreSintesi del regolatoreProprietà di separazione:
Blocco di regolazione: poiché (A,B) è raggiungibile, si possono assegnare arbitrariamente gli autovalori di (A+BK)
Blocco di stima dello stato: poiché (A,C) è osservabile, anche se solo x1 èdisponibile dall’uscita, si possono assegnare arbitrariamente gli autovalori di (A+LC)
Autovalori arbitrari
Autovalori arbitrari

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
36Sintesi del regolatoreSintesi del regolatore
Differenti condizioni iniziali per sistema reale e stimatore
Stato
xp x
xpcap xcap
v u
xcap
To Workspace3
y
To Workspace2
x
To Workspace1
t
To Workspace
K*u
L
K*u
K
1s
Integrator1
1s
Integrator
55
Constant
Clock
K*u
C1
K*u
C
K*u
B1
K*u
B
K*u
A1
K*u
A
0 2 4 6 8 10-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Tempo (sec)
Andamento errore di stima Andamento stati e loro stime
0 1 2 3 4 5 6 7 8 9 10-6-5-4-3-2-10123
Tempo (sec)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
37Sintesi del regolatoreSintesi del regolatoreAndamento stati e loro stime
0 1 2 3 4 5 6 7 8 9 10-6
-5
-4
-3
-2
-1
0
1
2
3
Tempo (sec)0 2 4 6 8 10-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Tempo (sec)
Andamento errore di stima
0 1 2 3 4 5 6 7 8 9 10-10
-8
-6
-4
-2
0
2
4
6
8
Tempo (sec)0 2 4 6 8 10-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Tempo (sec)
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
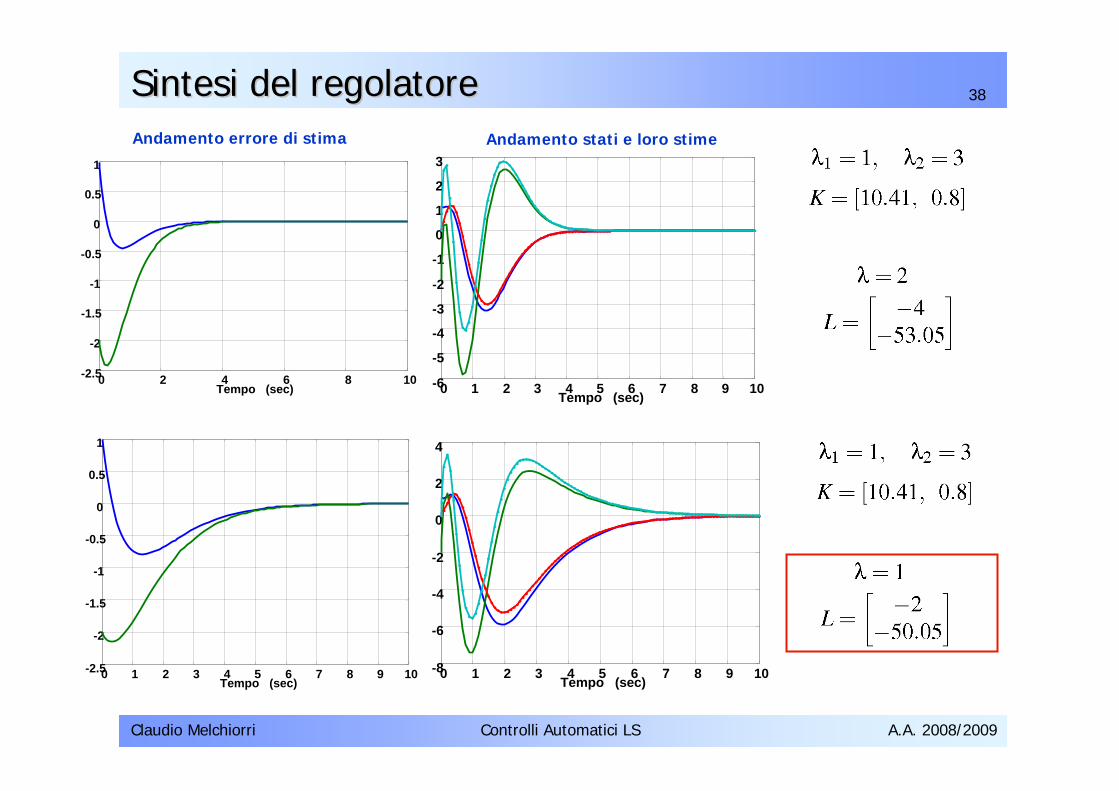
38Sintesi del regolatoreSintesi del regolatoreAndamento stati e loro stime
0 1 2 3 4 5 6 7 8 9 10-6
-5
-4
-3
-2
-1
0
1
2
3
Tempo (sec)0 2 4 6 8 10-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Tempo (sec)
Andamento errore di stima
0 1 2 3 4 5 6 7 8 9 10-8
-6
-4
-2
0
2
4
Tempo (sec)0 1 2 3 4 5 6 7 8 9 10-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Tempo (sec)

Prof. Claudio Melchiorri
DEIS-Università di Bologna
Tel. 051 2093034
e-mail: [email protected]
http://www-lar.deis.unibo.it/people/cmelchiorri
Controllo con retroazione Controllo con retroazione dello statodello stato
FINEFINE
CONTROLLI AUTOMATICI LS


![Terzo passo: lunghezza di una LCS LCS-Length(X, Y, m, n) for i = 0 to m c[i, 0] = 0 for j = 1 to n c[0, j] = 0 for j = 1 to n for i = 1 to m if x i ==](https://static.fdocumenti.com/doc/165x107/5542eb65497959361e8d0f83/terzo-passo-lunghezza-di-una-lcs-lcs-lengthx-y-m-n-for-i-0-to-m-ci-0-0-for-j-1-to-n-c0-j-0-for-j-1-to-n-for-i-1-to-m-if-x-i-.jpg)