DINAMICA DEL PUNTO MATERIALE - Istituto Nazionale di ...prati/Biotecnologie/3... · zione di un...
42
DINAMICA DEL PUNTO MATERIALE DOWNLOAD Il pdf di questa lezione ` e scaricabile dal sito http://www.ge.infn.it/∼prati/didattica/ 20/03/2017
Transcript of DINAMICA DEL PUNTO MATERIALE - Istituto Nazionale di ...prati/Biotecnologie/3... · zione di un...

DINAMICA DEL PUNTO MATERIALE
DOWNLOAD
Il pdf di questa lezione e scaricabile dal sito
http://www.ge.infn.it/∼prati/didattica/
20/03/2017

I 3 PRINCIPI DELLA DINAMICA
PRIMO PRINCIPIO
Esiste una categoria di sistemi di riferimento detti inerziali
dotati della seguente proprieta: per essi e nulla l’accelera-
zione di un qualunque punto materiale non soggetto a forze.
L’enunciato originale e: Ogni corpo persiste nel suo stato
di quiete o di moto rettilineo uniforme finche forze esterne
ad esso applicate non lo costringono a mutare tale stato.
Per semplicita consideriamo il concetto di forza come un
concetto primitivo. La forza e la manifestazione delle azioni
che gli altri punti materiali esercitano sul punto materiale P,
su cui stiamo concentrando la nostra attenzione.
2

L’esperienza dimostra che l’intensita delle azioni (= forze)
che gli altri punti materiali esercitano su P diminuisce allon-
tanando questi punti da P. Se le distanze sono sufficiente-
mente grandi possiamo considerare P come non soggetto a
forze.
Tutti gli osservatori (= sistemi di riferimento) che nelle pre-
dette condizioni misurano un’accelerazione nulla per P sono
inerziali. Tutti gli osservatori che vedono P o fermo o ani-
mato da moto rettilineo uniforme sono inerziali.
Fissato in particolare un osservatore che vede P fermo,
questo osservatore sara inerziale. Tutti gli altri osservatori
che si muovono di moto rettilineo uniforme rispetto a questo
osservatore sono inerziali e solo questi.3

SECONDO PRINCIPIO
La forza e una grandezza fisica vettoriale. Se il punto P
e soggetto alle azioni dei corpi circostanti, sara soggetto a
molteplici forze Fi.
Se su P agiscono N forze, si puo definire risultante R delle
N forze applicate a P la seguente somma vettoriale
R =N∑i=1
Fi . (1)
Enunciato del Secondo Principio: Per un osservatore iner-
ziale esiste una relazione di proporzionalita diretta tra la
risultante R delle forze agenti su P e l’accelerazione a di P.
4

Vale
R = M a , (2)
dove la costante di proporzionalita M prende il nome di
massa inerziale ed ha le dimensioni di una massa ([M ] = kg).
Dalla (2), che rappresenta la formulazione quantitativa del
Secondo Principio, si ricavano le unita di misura della forza.
Si ha [F ] = kg m s−2. Nel S.I. la forza che conferisce
l’accelerazione unitaria alla massa unitaria e il Newton (N).
Quindi N = kg m s−2.
5

TERZO PRINCIPIO
Se il punto materiale A esercita la forza FBA sul punto ma-
teriale B, allora B esercita su A una forza FAB uguale ed
opposta. Vale
FAB = −FBA . (3)
Risulta opportuno osservare che le forze FAB e FBA risultano
applicate a corpi diversi. Le rette d’azione delle due forze
devono coincidere (Terzo Principio in Forma Forte).
6

APPLICAZIONE: FORZA CENTRIPETA
Come prima applicazione delle leggi appena enunciate, si
propone il caso di un corpo di massa M che descrive con
moto a velocita costante v una circonferenza di raggio R e
centro C.
Si tratta di un moto circolare uniforme, dotato quindi di
un’accelerazione normale alla traiettoria. E l’accelerazione
centripeta, orientata verso il centro C e data da
acentr =v2
R. (4)
7

In base al Secondo Principio dovra esistere una forza Fcentr,
detta forza centripeta, la quale, applicata sul corpo e diretta
verso C, lo constringera a percorrere una siffatta traiettoria.
Il modulo di questa forza vale
Fcentr = Mv2
Roppure Fcentr = M ω2 R , (5)
dove ω = v/R e la velocita angolare.
Esercizio Un disco “33 giri” di diametro D = 30 cm e posato
sul piatto del giradischi che ruota compiendo 33 giri ogni
minuto primo. Una pallina di stucco di massa M = 0.3 g
e appiccicata sull’orlo del disco. Determinare la velocita
angolare del disco, la velocita e accelerazione della pallina.
Determinare inoltre la forza centripeta applicata alla pallina.8

Il raggio e R = D/2 = 0.15 m. La frequenza f e la velocita
angolare sono date da
f =33
60 s= 0.55 Hz ; ω = 2 π f = 3.46 rad s−1 . (6)
La velocita di P e
v = ω R = 0.52m
s, (7)
mentre l’accelerazione centripeta e
acentr = ω2 R = 1.79m
s2. (8)
Infine la forza centripeta su P e M acentr = 3 · 10−4 kg ·
1.79 m s−2 = 5.37 · 10−4 N . E una forza adesiva.
9

LEGGE DI GRAVITAZIONE UNIVERSALE - PESO
In base alla legge della gravitazione universale due punti ma-
teriali di masse M e m posti alla distanza d l’uno dall’altro
si attraggono con una forza F diretta lungo la loro congiun-
gente ed avente un’intensita data da
F = Gm M
d2, (9)
proporzionale quindi al prodotto m ·M tra le masse ed in-
versamente proporzionale al quadrato della distanza inter-
posta. Nella (9) la costante G di Cavendish vale G =
6.673 · 10−11 m3 kg−1 s−2.
10

Si puo dimostrare che la (9) vale anche nel caso che la massa
M sia estesa, purche abbia simmetria sferica. In tal caso M
va pensata concentrata nel suo centro C e d va intesa come
distanza tra m (puntiforme) ed il centro C.
Per peso P della massa m s’intende l’intensita della forza
gravitazionale che la Terra esercita su m.
La massa della Terra e M ∼= 5.97 · 10+24 kg ed il raggio
terrestre medio e RT∼= 6.37 · 10+6 m. Con questi valori
inseriti nella (9) si ottiene per il peso P di m la seguente
espressione
11

P = Gm M
R2T
= m g , (10)
dove g e il modulo, calcola-
to sulla superficie terrestre, del-
l’accelerazione di gravita
g =G M
R2T
=6.673 · 10−11 · 5.97 · 10+24(
6.37 · 10+6)2 m
s2∼= 9.81
m
s2. (11)
Ove necessario, il peso P di un corpo va trattato come una
forza e quindi si scrivera P = m g, dove l’accelerazione di
gravita e un vettore che, rispetto alla verticale locale (assi
z1 e z2 di figura), punta verso il basso.
12

PESO E MOTI UNIFORMEMENTE ACCELERATI
Anche in base alle considerazioni precedentemente svilup-
pate, si puo considerare il vettore g accelerazione di gravita
praticamente uniforme sulla superficie terrestre in una re-
gione ristretta rispetto al valore di RT . Pertanto un corpo
di massa m sara soggetto ad una forza peso
P = m g (12)
praticamente uniforme in tutta la regione considerata. Nel
caso il peso sia l’unica forza applicata al corpo, si applichera
il Secondo Principio al moto del corpo come segue
R = m a → m g = m a → a = g , (13)
13

dove l’ultimo passaggio richiede l’identificazione tra la massa
gravitazionale e quella inerziale (!!!).
In conclusione, nei casi in cui la forza peso risulti essere
l’unica forza applicata ad un corpo ed il moto avvenga su
“piccole distanze”, si avranno moti uniformemente accele-
rati con accelerazione g.
Moti di questo tipo sono stati trattati nella parte di Cine-
matica.
14

SATELLITI IN ORBITA CIRCOLARE
Visto da un osservatore inerziale (quindi, non ruotante), il
moto di un satellite che percorre un’orbita circolare attorno
alla Terra appare come un moto circolare uniforme. Siano
T il periodo, r il raggio dell’orbita e m la massa del satellite.
La forza di gravita agente sulla massa m con intensita
F = Gm M
r2(14)
e la forza centripeta che impone al satellite il moto circolare
uniforme con accelerazione an = ω2 r = 4 π2
T2 r.
Il Secondo Principio della dinamica si
scrive
Gm M
r2= m
4 π2
T2r , (15)
dove la massa m puo essere eliminata.15

Si ottengono le seguenti relazioni che intercorrono tra pe-
riodo T e raggio r dell’orbita
T = 2 π
√√√√ r3
G Me r =
G M T2
4 π2
13
. (16)
Per un’orbita alla quota di 100 km sulla superficie terrestre
si ha r = RT + 1.0 · 10+5 m = 6.47 · 10+6 m. La prima
delle (16) fornisce come valore del periodo T ∼= 5180 s ∼=
86 minuti primi.
Il raggio dell’orbita geostazionaria si ottiene dalla seconda
delle (16) ponendo T = 24 h = 86400 s. Si ottiene r =
4.223 · 10+7 m, cui corrisponde un’orbita alla quota h =
r −RT = 3.586 · 10+7 m sopra la superficie terrestre.
16

REAZIONE VINCOLARE - PIANO ORIZZONTALE
Si consideri un corpo soggetto al suo peso P ed appoggiato
su di un piano orizzontale che lo sostiene. Il corpo ha ac-
celerazione nulla, quindi la risultante R delle forze ad esso
applicate sara nulla (II Principio). Questo si spiega con la
presenza di una forza vincolare N che il piano esercita sul
corpo impedendogli di cadere. Si impone
P + N = 0 , (17)
la cui componente z da
−m g+N = 0 → N = m g . (18)
Ne discende che la reazione vincolare N e diretta verso l’alto
e vale in modulo m g.17

PIANO INCLINATO SENZA ATTRITO
Si consideri un corpo di massa m che scivola senza incontrare
attrito giu per un piano inclinato. L’inclinazione rispetto
all’orizzontale e dell’angolo θ.
Su di esso agiscono il peso m g e la
reazione vincolare N, che e perpen-
dicolare al piano. Si imposta
N +m g = m a (19)
che, proiettata sugli assi x e z opportunamente orientati, da
m g sin(θ) = m ax ; N −m g cos(θ) = m az . (20)
Si ricava N = m g cos(θ) (poiche az = 0 !) e ax = g sin(θ).
E un moto uniformemente accelerato giu per il piano.18

MOLLA: COMPRESSIONE E ALLUNGAMENTO
Si consideri una molla di lunghezza a riposo x0, disposta
orizzontalmente (lungo l’asse x) e fissata per un’estremita
ad una parete rigida come in figura. Se un agente esterno
applica all’estremita libera A della molla una forza F∗ diretta
lungo l’asse x, l’ascissa di A passera da x0 ad x. Sia ∆x =
x− x0 la conseguente deformazione. Se vale ∆x > 0 si ha
un allungamento, se vale ∆x < 0
si ha una compressione. In regime
lineare vale la legge di Hooke nella
forma
F ∗x = k ∆x , (21)
dove k e la costante elastica della molla ([k] = N/m).19

SISTEMA MASSA + MOLLA
Adesso s’intende determinare la legge del moto di una massa
m che viene fissata all’estremo libero A della molla. Per una
deformazione ∆x della molla, la stessa subisce l’azione di
una forza F ∗x = k ∆x ad opera della massa m. Per il III
Principio la molla esercita sulla massa m una forza uguale
(in modulo) ed opposta F = −F∗, la cui componente x
vale Fx = −k ∆x. E una forza elastica di richiamo verso la
posizione x0 di equilibrio (vedere disegno).
Il II Principio della Dinamica per il
moto di m da
R = N +m g + F = m a , (22)
dove vale N +m g = 0 poiche il moto e lungo x.
20

La componente x della (22) si riduce a
md2x(t)
dt2= −k ∆x →
d2∆x
dt2= −
k
m∆x (23)
poiche, essendo x0 una costante, vale l’uguaglianza
d2∆x
dt2=
d2 [x(t)− x0]
dt2=
d2x(t)
dt2. (24)
In base alle considerazioni presentate nella Cinematica del
punto materiale, l’equazione (23) prevede per la deformazione
∆x (e, quindi, per l’estremita A della molla) un moto ar-
monico avente pulsazione ω, periodo T e frequenza f dati
da
ω =
√√√√ km
; T = 2 π
√m
k; f =
1
2 π
√√√√ km. (25)
21

Il sistema massa + molla rappresenta un semplice esempio
di oscillatore armonico, il cui moto e armonico attorno alla
posizione di equilibrio x0. La legge oraria puo essere scritta
come
x(t) = x0 + α cos(ω t) + β sin(ω t) . (26)
La soluzione contiene le quantita α e β, che possono es-
sere determinate in base alle condizioni iniziali x(0) e vx(0)
(posizione e velocita di m al tempo t = 0). Si ha
α = x(0)− x0 e β =vx(0)
ω. (27)
Si dimostrera che l’ampiezza delle oscillazioni di m attorno
ad x0 e data da√α2 + β2.
22

LAVORO
Si consideri una forza F costante applicata ad un punto
materiale P. Se P si sposta dalla posizione A alla posizione
B andando incontro allo spostamento ∆r = rB − rA, si dice
che la forza F esegue su P il lavoro LA→B dato da
LA→B = F ·∆r = F ∆r cos θ , (28)
dove θ e l’angolo compreso tra F e ∆r. Se F non e costante,
si suddivide la traiettoria che P percorre andando da A a B
in tanti (N) piccoli spostamenti ∆ri lungo i quali si ap-
prossima che la forza assuma i valori Fi (costanti sui ∆ri
corrispondenti). Il lavoro globale e dato dalla somma
LA→B∼=
N∑i=1
Fi ·∆ri → LA→B =∫ BA
F · dr . (29)
23

L’unita di misura del lavoro e il Joule = Newton ·metro. Il
simbolo di Joule e J, da cui [L] = J = kg m2 s−2).
Nella semplice situazione (28) di forza costante il segno di
L dipende da cos θ. In particolare, nel caso di spostamento
parallelo alla forza si ha L = F∆r mentre nel caso di sposta-
mento antiparallelo si ha L = −F∆r. Per spostamenti per-
pendicolari a F il lavoro e nullo.
Esercizio Una valigia ha massa m = 10 kg. Calcolare il
lavoro necessario per sollevarla di 1.5 m, per abbassarla di
1.5 m, per farla cadere di 2 m e per trasportarla in orizzon-
tale di 100 m. Calcolare il lavoro che la forza peso esegue
in corrispondenza degli stessi spostamenti cui la valigia va
incontro.24

LAVORO PER ALLUNGARE UNA MOLLA
Sia data una molla di lunghezza a riposo x0 e costante ela-
stica k. Un agente esterno che voglia estendere la molla
dalla lunghezza x0 alla lunghezza xB deve applicare una forza
variabile F∗ diretta lungo la direzione positiva dell’asse x e
data da
F ∗x(x) = k ∆x = k (x− x0) . (30)
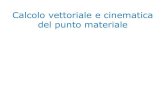
Il lavoro L0→B che l’agente esterno
deve eseguire tramite F∗ e dato
dall’integrale
L0→B =∫ xBx0
F ∗x(x) dx =1
2k (xB−x0)2
(31)al cui valore si puo risalire valutando l’area A della figura.
25

Si puo verificare che l’espressione (31) da anche il lavoro
necessario per comprimere la molla dalla lunghezza x0 ad
una lunghezza xB < x0.
TEOREMA DELL’ENERGIA CINETICA
Dalla Cinematica si ricava, nel caso di moto 1D uniforme-
mente accelerato con accelerazione ax0, la relazione
ax0 (x− x0) =1
2v2x −
1
2v2x0 (32)
tra accelerazione, spazio percorso e velocita. Considerando
un percorso da xA a xB e tenendo conto che nel caso 1D
vale v2x = v2, questa relazione puo essere riscritta, previa
moltiplicazione per la massa m di P, come
1
2m v2
B −1
2m v2
A = m ax (xB − xA) . (33)
26

Nella (33) il termine m ax puo essere interpretato grazie al
II Principio come la componente x della risultante R delle
forze applicate su P e, quindi, vista la definizione (28) e
considerato il fatto che la situazione considerata e 1D, si
puo interpretare l’intero termine m ax (xB − xA) come il
lavoro eseguito dalla risultante R (costante !) su P nel suo
spostamento da A a B. Le conclusioni tratte dalla (33)
sono applicabili ad un contesto piu generale del caso 1D
qua richiamato.Si puo enunciare il Teorema dell’energia cinetica, denomi-
nato anche Teorema delle forze vive, come segue: il lavoro
della risultante delle forze applicate su P uguaglia la varia-
zione (= incremento) dell’energia cinetica di P. Cioe
L(R)A→B = ∆K = KB −KA , (34)
27

dove la quantita K e definita da

K =1
2m v2 (35)
e viene chiamata energia cinetica della massa m. E il lavoro
che m puo eseguire arrestandosi. Si ha [K] = J.Come semplice applicazione del teorema ap-
pena enunciato, si considera il punto mate-
riale P di massa m che, sotto l’azione del suo
peso m g, passa dalla quota zA alla quota zB.
Si ottiene
1
2m v2
B −1
2m v2
A = −m g (zB − zA) , (36)
il che implica vB < vA. Dalla (36) si ha zB = zA +v2A−v
2B
2g e,
quindi, (zB)max = zA +v2A
2 g per vB = 0.
28

FORZE CONSERVATIVE
Una forza e una forza conservativa quando il lavoro che essa
esegue nello spostamento del suo punto di applicazione dal
punto A al punto B dipende solo dalle coordinate di A e di
B, ma non dal percorso seguito.
In questi casi esiste una funzione del posto U = U(r), detta
energia potenziale, la cui diminuzione da il lavoro eseguito
dalla forza conservativa. Per la forza F conservativa vale
L(F)A→B =
∫ BA
F · dr = UA − UB = −∆U , (37)
dove U e l’energia potenziale di F ed il termine UA − UB =
U(rA) − U(rB) rappresenta la diminuzione subita da U nel
passaggio da A a B. Si ha [U ] = J.29

In linea di principio le forze conservative rappresentano un
mezzo per effettuare investimenti energetici in quanto se
eseguiamo un lavoro positivo contro una forza conservativa,
detto lavoro viene immagazzinato sotto forma di energia
potenziale e possiamo successivamente recuperarlo.
Questo punto di vista conduce ad un’intuitiva definizione di
energia potenziale. Sia F una forza conservativa e sia F∗ =
−F la forza che applichiamo per contrastare F. Si arriva
alla seguente definizione di incremento di energia potenziale,
equivalente alla (37),
UB − UA = −∫ BA
F · dr =∫ BA
F∗ · dr = L(F∗)A→B . (38)
La (38) dice che l’incremento di U e uguale all’investimento
energetico L(F∗)A→B che abbiamo eseguito.
30

Nel caso in cui si considera come forza conservativa il peso
m g della massa m, la forza che noi dobbiamo applicare ad
m per contrastare il peso e F∗ = −m g = −m (−g) k = m g k
(k = versore dell’asse z, orientato verso l’alto). In questo
caso la (38) diventa
UB − UA =∫ zBzA
m g dz = m g zB −m g zA , (39)
da cui discende la seguente espressione per l’energia poten-
ziale gravitazionale di m
U(z) = m g z asse z rivolto verso l′alto . (40)
Anche la forza di richiamo di una molla e conservativa. La
corrispondente energia potenziale, grazie alla (31), vale
U(x) =1
2k (∆x)2 =
1
2k (x− x0)2 . (41)
31

CONSERVAZIONE DELL’ENERGIA MECCANICA
L’applicazione del teorema dell’energia cinetica al caso in
cui sulla massa m agisce il peso ha portato alla relazione
1
2m v2
B −1
2m v2
A = −m g (zB − zA) (42)
che puo essere riscritta come
1
2m v2
A +m g zA =1
2m v2
B +m g zB . (43)
Questa, usando le definizioni di energia cinetica e potenziale
K =1
2m v2 ; U(z) = m g z , (44)
diventa
KA + UA = KB + UB . (45)
32

Questa relazione stabilisce nel caso delle forze gravitazionali
il principio della conservazione dell’energia meccanica, prin-
cipio la cui validita e ampiamente estendibile a moltissime
situazioni.
Per un punto materiale P si definisce energia meccanica (to-
tale) la quantita
ETOT = K + U , (46)
somma dell’energia cinetica e dell’energia potenziale di P.
Qualora su P agiscono esclusivamente forze conservative, si
e in grado di affermare che l’energia meccanica (totale) di P
si conserva durante il suo moto, purche nell’energia poten-
ziale U della (46) vengano sommate tutte le energie poten-
ziali associate a tutte le forze (conservative !) agenti su
P.33

In presenza di vincoli fermi e lisci (senza attrito), sul punto
materiale agiscono anche forze normali (esempio: reazione
normale N del piano inclinato) le quali non eseguono lavoro.
La loro presenza puo essere ignorata nel calcolo di ETOT .Pertanto, nel caso su P agiscano solo forze conservative, la
conservazione dell’energia meccanica totale di P quando P
passa da A a B si scrive
∆ETOT = ETOTB −ETOTA = 0 → ETOTA = ETOTB . (47)
Se entrano in gioco anche forze non conservative, l’ener-
gia meccanica di P non si conservera, ma si trasformera in
altre forme di energia di tipo non meccanico. Una serie di
passaggi riportati nelle slides successive porta alla relazione
L(n.c.)A→B = ∆ETOT = ETOTB − ETOTA , (48)
dove L(n.c.)A→B e il lavoro delle forze non conservative.
34

NON CONSERVAZIONE DI ETOT
Nell’enunciato del Teorema delle forze vive
L(R)A→B = ∆K = KB −KA , (49)
il lavoro L(R)A→B della risultante R delle forze agenti su P puo
essere scritto come somma di due contributi
L(R)A→B = L
(c.)A→B + L
(n.c.)A→B , (50)
uno dovuto alle forze conservative e l’altro dovuto alle forze
non conservative. Si puo scrivere quindi
L(n.c.)A→B = KB −KA − L
(c.)A→B . (51)
35

Applicando la definizione di energia potenziale alla parte con-
servativa Rc. della risultante delle forze su P si ottiene
L(c.)A→B =
∫ BA
Rc. · dr = UA − UB = −∆U , (52)
dove con U s’intende la somma delle energie potenziali re-
lative a tutte le forze conservative agenti su P (l’energia
potenziale globale dovuta a tante forze conservative e la
somma di tutte le singole energie potenziali dovute ad ogni
singola forza conservativa).
Usando la (51) e la (52) si arriva a
L(n.c.)A→B = KB −KA + UB − UA = ETOTB − ETOTA , (53)
che coincide con la (48).
36

CONSERVAZIONE DELL’ENERGIA MECCANICA
NEL SISTEMA MASSA + MOLLA
Si e visto che il sistema massa+molla va incontro a moto
oscillatorio dove l’elongazione della molla (∆x)(t) = x(t)−x◦segue la legge oraria
(∆x)(t) = α cos(ω t) + β sin(ω t) . (54)
Al tempo t = 0 si ha
(∆x)(0) = α e v(0) =
d(∆x)(t)
dt
t=0
= β ω . (55)
Considerata la definizione di energia potenziale elastica
U =1
2k (∆x)2 , (56)
37

l’energia meccanica del sistema massa+molla diventa
ETOT =1
2m v2(t) +
1
2k (∆x)2(t) . (57)
Questa quantita si conserva durante le oscillazioni ed e
uguale al valore che essa assume al tempo t = 0. Consi-
derate le (55), la quantita ETOT , costante durante il moto,
puo essere scritta anche come
ETOT =1
2m v2(0)+
1
2k (∆x)2(0) =
1
2m β2 ω2+
1
2k α2 . (58)
Ricordando che vale ω =√km, la (58) diventa ETOT =
12 k (α2 + β2). Questa espressione per la costante del moto
energia meccanica totale del sistema massa+molla dimostra
che l’ampiezza delle oscillazioni del moto armonico e data
[vedi (56)] da√α2 + β2.
38

39

POTENZA
Se la forza F esegue il lavoro ∆L in un tempo ∆t, si definisce
la potenza P (media) erogata da F come
P =∆L
∆t. (59)
Restringendo opportunamente la base di tempo su cui si
fa il calcolo, si puo arrivare ad una definizione di potenza
istantanea. Se il lavoro e fatto dalla forza F applicata su
un punto materiale animato dalla velocita v, allora si puo
scrivere dL = F · dr = F · v dt (vedere appunti sul lavoro) e
quindi la potenza istantanea P erogata da F diventa
P =F · dr
dt=
F · v dt
dt= F · v . (60)
40

Nel caso in cui P indichi la potenza di R, la risultante appli-
cata al punto materiale (P = R · v), si conclude che il moto
e accelerato se P > 0 (a · v > 0, l’energia cinetica K sta
crescendo) e decelerato se P < 0 (a ·v < 0, l’energia cinetica
K sta diminuendo).La potenza e misurata in Watt = Joule/secondo ([P ] =
W ). Dalla definizione (59) di potenza discende che una
potenza costante P applicata per un tempo ∆t corrisponde
all’erogazione di un’energia P ∆t. Ne deriva la familiare
(non SI) unita di misura Wh con i relativi multipli (kWh).
Si ha 1 kWh = 3600 s 103 W = 3.6 MJ.Esercizio - Determinare la forza propulsiva applicata dalle
eliche ad un motoscafo che viaggia a 25 km/h sapendo che
il motore eroga una potenza P = 70 kW con un rendimento
ai fini della propulsione del 75%.41