
Capitolo 6 - Caratterizzazione dell’azione sismica sulle ... Cap 6.pdf · 6.1 RISPOSTA DINAMICA...
35
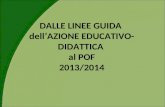
Capitolo 6 - Caratterizzazione dell’azione sismica sulle costruzioni Lo studio della pericolosità sismica di un territorio consente di ottenere informazioni sulla sismicità del sito in esame, sulle caratteristiche dei terremoti che sono stati registrati in passato, sulla probabilità di verificarsi di terremoti futuri e sull’eventuale presenza di effetti di amplificazione locale delle onde sismiche. Ovviamente per caratterizzare l’azione sismica ai fini della progettazione strutturale, è necessario determinare la modalità di trasferimento dell’energia dall’onda sismica, generatasi nell’ipocentro e giunta in superficie, alle costruzioni. In ingegneria sismica, a tal proposito, si è soliti riferirsi ad uno schema del sistema terreno-struttura particolarmente semplice ma altrettanto efficace, l’oscillatore ad un grado di libertà, del quale se ne analizza la risposta al variare delle sue caratteristiche dinamiche, tipicamente periodo proprio e smorzamento. Si faccia riferimento quindi ad una struttura schematizzabile mediante un sistema ad un grado di libertà (SDOF) soggetto all’azione sismica rappresentata dall’accelerazione del terreno () g x t . Detti: - O un sistema di riferimento assoluto (esterno al sistema struttura-terreno), - O’ un sistema di riferimento solidale al terreno, - () ut lo spostamento relativo della massa M rispetto al sistema di riferimento O’, - () xt lo spostamento della massa M nel sistema di riferimento assoluto O, legato allo spostamento relativo () ut e allo spostamento del terreno () g x t secondo l’equazione () () () g xt x t ut = + , come illustrato in Figura 6-1; l’equazione del moto nel sistema di riferimento assoluto O risulta: 0 M x Cx kx ⋅ + ⋅ + ⋅ = , (6.1) mentre nel sistema di riferimento relativo: () g Mu Cu ku M x t ⋅ + ⋅ + ⋅ =- ⋅ . (6.2) Dividendo entrambi i membri della (6.2) per la massa M, l’equazione del moto può essere riscritta nella forma:
Transcript of Capitolo 6 - Caratterizzazione dell’azione sismica sulle ... Cap 6.pdf · 6.1 RISPOSTA DINAMICA...

Capitolo 6 - Caratterizzazione dell’azione sismica sulle costruzioni
Lo studio della pericolosità sismica di un territorio consente di ottenere informazioni sulla sismicità
del sito in esame, sulle caratteristiche dei terremoti che sono stati registrati in passato, sulla
probabilità di verificarsi di terremoti futuri e sull’eventuale presenza di effetti di amplificazione
locale delle onde sismiche. Ovviamente per caratterizzare l’azione sismica ai fini della
progettazione strutturale, è necessario determinare la modalità di trasferimento dell’energia
dall’onda sismica, generatasi nell’ipocentro e giunta in superficie, alle costruzioni.
In ingegneria sismica, a tal proposito, si è soliti riferirsi ad uno schema del sistema terreno-struttura
particolarmente semplice ma altrettanto efficace, l’oscillatore ad un grado di libertà, del quale se ne
analizza la risposta al variare delle sue caratteristiche dinamiche, tipicamente periodo proprio e
smorzamento.
Si faccia riferimento quindi ad una struttura schematizzabile mediante un sistema ad un grado di
libertà (SDOF) soggetto all’azione sismica rappresentata dall’accelerazione del terreno ( )gx t�� . Detti:
- O un sistema di riferimento assoluto (esterno al sistema struttura-terreno),
- O’ un sistema di riferimento solidale al terreno,
- ( )u t lo spostamento relativo della massa M rispetto al sistema di riferimento O’,
- ( )x t lo spostamento della massa M nel sistema di riferimento assoluto O, legato allo
spostamento relativo ( )u t e allo spostamento del terreno ( )gx t secondo l’equazione
( ) ( ) ( )gx t x t u t= + ,
come illustrato in Figura 6-1; l’equazione del moto nel sistema di riferimento assoluto O risulta:
0M x C x k x⋅ + ⋅ + ⋅ =�� � , (6.1)
mentre nel sistema di riferimento relativo:
( )gM u C u k u M x t⋅ + ⋅ + ⋅ = − ⋅�� � �� . (6.2)
Dividendo entrambi i membri della (6.2) per la massa M, l’equazione del moto può essere riscritta
nella forma:

22 ( )gu u u x tξ ω ω+ ⋅ ⋅ ⋅ + ⋅ = −�� � �� (6.3)
Figura 6-1 – moto dell’oscillatore semplice nei sistemi di riferimento O e O’
All’equazione di moto, per la completa definizione del problema, devono essere aggiunte le
condizioni iniziali cioè la posizione e la velocità della massa; tipicamente la struttura si considera in
quiete prima dell’avvento del terremoto cosicché spostamento e velocità iniziali possono essere
considerati nulli. L’equazione del moto, ovviamente, per la stessa natura casuale della forzante,
costituita nel caso in esame dal moto sismico, non può essere risolta per via analitica, come nel caso
della forzante armonica; è necessario quindi ricorrere a metodi numerici.
6.1 RISPOSTA DINAMICA DEL SISTEMA SDOF SOGGETTO A MOTO SISMICO
Ai fini della risoluzione dell’equazione del moto del sistema SDOF soggetto ad una eccitazione di
tipo non armonico ma ancora definita analiticamente sì da poterne calcolare l’integrale, si può
utilmente far ricorso all’integrale di Duhamel. Tale metodo si basa sulla risposta del sistema ad una
forzante impulsiva, cioè, una forza molto grande che agisce per un piccolo ma finito intervallo di
tempo, come rappresentato in Figura 6-2 dove la forza impulsiva p(t), di durata pari ad ε, agisce
nell’intervallo temporale t1 - t2. Assumendo per la forza impulsiva il valore costante nel tempo
p(t)=1/ε, l’impulso totale, rappresentato dall’integrale di questa nell’intervallo di tempo, risulta pari
all’unità come riportato nell’equazione (6.4).

2
1
1 1
t
t
p dt εε
= ⋅ =∫ (6.4)
Figura 6-2: Forzante impulsiva p=1/ε
Mantenendo l’ampiezza della forza, definita come l’integrale nel tempo di p(t), pari all’unità, al
tendere di ε a zero il modulo della forza tende all’infinito.Una forza impulsiva, nel caso in cui ε→0,
viene detta forza impulsiva unitaria ed è nota come funzione δ o δ di Dirac, definita tramite
l’espressione:
1
1
0 se t t( t )
1 se t = t δ τ
≠− =
(6.5)
Si consideri ora un sistema SDOF soggetto ad una forzante esterna p(t), l’equazione del moto può
essere scritta nel seguente modo:
( )Mu Cu Ku p t+ + =�� � . (6.6)
Integrando entrambi i membri tra t1 e t2 e considerando una forzante impulsiva unitaria si ottiene:
2 2
1 1
( ) ( ) 1t t
t t
Mu Cu Ku dt p t dt+ + = =∫ ∫�� � (6.7)
Considerando che t2 = t1 + ε, la (6.7) può essere riscritta:

1
1
1 1 1 1[ ( ) ( )] [ ( ) ( )] ( ) 1t
t
M u t u t C u t u t K u t dtε
ε ε
+
+ +⋅ − + ⋅ − + ⋅ =∫� � (6.8)
Assumendo come condizioni iniziali 1( ) 0u t = e 1( ) 0u t =� (cioè spostamento e velocità del sistema
inizialmente nulli) e passando al limite per ε→0, si può affermare che:
1( ) 0u t ε+ = (6.9)
cioè lo spostamento del sistema, inizialmente in quiete, dopo un tempo infinitesimo ε continua ad
essere nullo. Ne deriva che il secondo e terzo termine del primo membro della (6.8) sono nulli
infatti:
1 1[ ( ) ( )] 0C u t u tε+⋅ − = (6.10)
poiché 1( ) 0u t ε+ = per la(6.9) e 1( ) 0u t = per ipotesi e:
1
1
( ) 0t
t
K u t dtε+
⋅ =∫ (6.11)
poiché ( )u t assume valori nulli nell’intervallo di tempo 1 1t t ε+− .
In base alle considerazioni appena fatte dalla (6.8) si ha:
1[ ( )] 1M u t ε⋅ + =� (6.12)
quindi, ad una forza impulsiva che agisce al tempo 1t t= , corrisponde una velocità della massa M
pari a:
1( ) 1/u t Mε+ =� (6.13)
Una forza impulsiva unitaria produce, in un oscillatore semplice, delle vibrazioni libere
rappresentate dal sistema di equazioni (6.14) costituito dall’equazione del moto e dalle condizioni
iniziali calcolate nell’istante temporale t0 come rappresentato in Figura 6-3:

0M u C u k u⋅ + ⋅ + ⋅ =�� �
0( ) 0u t =
0( ) 1/u t M=�
(6.14)
Figura 6-3: indicazione del tempo t0
Supponendo per semplicità di calcolo che lo smorzamento sia nullo, la prima equazione del sistema
(6.14) può essere riscritta nel seguente modo:
0M u k u⋅ + ⋅ =�� (6.15)
L’equazione (6.15), differenziale del secondo ordine ordinaria, lineare, omogenea a coefficienti
costanti, ha un integrale generale del tipo:
stu e= (6.16)
in cui la costante s è incognita e che, sostituito nell’espressione (6.15), fornisce:
2( ) 0stMs k e+ = (6.17)
la cui equazione caratteristica è:
2( ) 0Ms k+ = (6.18)

che fornisce:
1,2 s iω= ± (6.19)
La soluzione generale della (6.15) diventa quindi:
1 21 2( ) s t s tu t A e A e= + (6.20)
1 2( ) i t i tu t A e A eω ω−= + (6.21)
Poiché:
cos e ,2 2
ix ix ix ixe e e ex senx
i
− −+ −= = (6.22)
l’espressione (6.21) può essere riscritta nella forma:
( ) cos( ) ( )u t A t B sen tω ω= ⋅ + ⋅ (6.23)
dove A e B sono costanti da determinare sulla base delle condizioni iniziali, sostituendo
nell’espressione (6.23) ( 0)u t = , si ottiene (0)A u= e, sostituendo nella
( ) ( ) cos( )u t A sen t B tω ω ω ω= − ⋅ ⋅ + ⋅ ⋅� (6.24)
( 0)u t =� , si ottiene (0)u
Bω
=�
.
Sostituendo le condizioni iniziali nella (6.23) si ottiene:
(0)( ) (0) cos( ) ( )
uu t u t sen tω ω
ω= ⋅ ⋅ + ⋅
� (6.25)

con k
Mω = . Quindi, assunte come condizioni iniziali la seconda e terza equazione del sistema
(6.14), e sostituite nella (6.25), si ottiene la risposta dell’oscillatore semplice ad una forza impulsiva
unitaria:
[ ]1( ) ( ) ( )u t sen t h t
Mω τ τ
ω= − = −
⋅ (6.26)
Si consideri ora una forza ( )p t variabile nel tempo secondo una legge oraria casuale. Questa può
essere rappresentata come una sequenza di impulsi infinitesimi come rappresentato in Figura 6-4.
Figura 6-4: Forza variabile rappresentabile come serie di impulsi
La risposta di un oscillatore semplice alla forza ( )p t variabile nel tempo può essere quindi
rappresentata come somma delle risposte agli impulsi infinitesimi al tempo τ. Nel caso in cui la
forzante sia definita analiticamente da una funzione che permetta di calcolarne l’integrale si ottiene
quindi l’espressione:
0
( ) ( ) ( ) t
u t p h t dτ τ τ= ⋅ −∫ (6.27)
che prende il nome di integrale di Duhamel.
L’integrale di Duhamel è sicuramente efficace quando la forzante è definita da una funzione
continua, quando però la forzante è definita da valori numerici a istanti di tempo discreti non è più
possibile utilizzare il metodo di risoluzione tramite l’integrale di Duhamel, è quindi necessario
procedere alla risoluzione attraverso metodi numerici. È questo il caso delle registrazioni

accelerometriche dei terremoti che, nonostante la continuità del fenomeno naturale, vengono
effettuate ad intervalli di tempo discreti.
I metodi numerici si basano sulla tecnica dell’integrazione al passo che consiste sinteticamente nel
dividere la durata della forzante in un numero di intervalli di ampiezza costante, di interpolare la
forzante nei vari intervalli e di determinare la risposta in ogni intervallo, nota la risposta
nell’intervallo precedente.
Un metodo numerico basato sull’approssimazione della velocità e dell’accelerazione a differenze
finite, è quello delle differenze centrali. Si consideri una forzante in forma discreta costituita da n
valori discretizzati ad intervallo costante ∆t, siano iu , 1iu + e 1iu − rispettivamente le espressioni dello
spostamento della massa M al tempo i, i+1 e i-1, sia pi il valore della forzante all’intervallo di
tempo i, e sia l’equazione di moto dell’oscillatore semplice al generico istante i la seguente:
i i i iM u C u K u p⋅ + ⋅ + ⋅ =�� � , (6.28)
si ricava:
i i ii
p C u K uu
M
− ⋅ − ⋅=�
�� (6.29)
Assumendo la velocità iu� e l’accelerazione iu�� iniziali, definite in termini di differenze finite, come
riportato nelle espressioni:
1 1
2i i
i
u uu
t+ −−=
⋅ ∆� ,
1 12
2
( )i i i
i
u u uu
t+ −+ +=
∆��
(6.30)
e assumendo 1 1, i i ip p e p+ − pari ai valori della forzante rispettivamente al tempo i, i+1 e i-1,
sostituendo le espressioni (6.30) nell’equazione di moto (6.28), si ottiene:
1 1 1 12
2
( ) 2i i i i i
i i
u u u u uM C K u p
t t+ − + −− + −⋅ + + ⋅ =
∆ ⋅ ∆ (6.31)

in cui sia ui che ui-1 sono noti. Raccogliendo le quantità note della (6.31), si ottiene:
1 12 2 2
2
( ) 2 ( ) 2 ( )i i i i
M C M C Mu p u K u
t t t t t+ −
+ = − − − − ∆ ∆ ∆ ∆ ∆ (6.32)
Ponendo :
12 2
2ˆ
( ) 2 ( )i i i i
M c Mp p u k u
t t t−
= − − − − ∆ ∆ ∆ ,
2ˆ
( ) 2
M Ck
t t= +
∆ ∆
(6.33)
la (6.32) diventa:
1ˆ ˆi ik u p+⋅ = (6.34)
dove l’incognita è 1ˆˆ /i iu p k+ = . La soluzione al tempo i+1 può essere quindi determinata una volta
nota la soluzione al tempo i. Per l’inizio del processo iterativo e la determinazione di 1u , è
necessario conoscere 0u e 0 1u − : risolvendo le (6.30) per i = 0 si ottiene:
1 0 1
2i
u uu
t−−=
⋅∆� ,
1 0 0 12
2
( )i
u u uu
t−+ +=
∆��
(6.35)
Sostituendo la prima equazione nella seconda si ottiene:
2
0 1 0 0 0
( )( )
2
tu u t u u−
∆= − ∆ + ⋅� �� (6.36)
Note le condizioni iniziali, cioè lo spostamento 0u e la velocità 0u� , dall’equazione di moto

0 0 0 0M u C u K u p⋅ + ⋅ + ⋅ =�� � (6.37)
è possibile ricavare il valore dell’accelerazione 0u�� :
0 0 00
p c u k uu
M
− ⋅ − ⋅=�
�� (6.38)
Sono state quindi definite tutte le grandezze necessarie all’inizio del processo iterativo; noti la
massa, la rigidezza e lo smorzamento dell’oscillatore, noti i valori della forzante ad ogni intervallo
temporale e definiti lo spostamento e la velocità iniziali pari a zero, dalla (6.38) si ottiene infatti
0 0u =�� e dalla (6.36) 0 1 0u − = ; definite inoltre le quantità:
2ˆ
( ) 2
M Ck
t t= +
∆ ∆ (6.39)
12 2
2ˆ
( ) 2 ( )i i i i
M c Mp p u k u
t t t−
= − − − − ∆ ∆ ∆ , (6.40)
è possibile iniziare il processo iterativo e, noti 1iu − e iu al tempo i=0, calcolare per ogni passo
temporale le grandezze ˆ ip e 1
ˆˆi
i
pu
k+ = ; il processo iterativo può così proseguire per ogni passo
temporale successivo.
In alternativa al metodo delle differenze centrali, può essere utilizzato il metodo di Newmark. Tale
metodo definisce lo spostamento e la velocità all’istante temporale i+1 in funzione delle stesse
grandezze individuate all’istante precedente come indicato nelle (6.41) e (6.42):
2 21 1( ) [(0.5 ) ( ) ] [ ( ) ]i i i i iu u t u t u t uβ β+ += + ∆ + − ⋅ ∆ + ∆� �� �� (6.41)
1 1[(1 ) ] ( )i i i iu u t u t uγ γ+ += + − ⋅∆ + ⋅ ∆� � �� �� (6.42)
Dalla (6.42) si deduce che la variazione di spostamento da un passo al successivo è funzione della
variazione di accelerazione nello stesso intervallo temporale; tale variazione può essere considerata
o lineare oppure può essere preso un valore medio come rappresentato in Figura 6-5.

Figura 6-5: Variazione dell’ accelerazione lineare (destra) e valore medio (sinistra)
Nel caso in cui si consideri il valore medio, all’istante temporale τ, compreso fra it e 1it + ,
corrisponde un’accelerazione:
1
1( ) ( )
2 i iu u uτ += +�� �� �� (6.43)
da cui si ha:
1( ) ( )2i i iu u u uττ += + +� � �� �� (6.44)
1 1( )2i i i i
tu u u u+ +
∆= + +� � �� �� (6.45)
2
1 1
( )( )
4i i i i i
tu u u t u u+ +
∆= + ⋅ ∆ + +� �� �� (6.46)
Dalla (6.46) si ricava il valore di 1
4β = . Nel caso in cui si consideri che la variazione di
accelerazione sia lineare si ricava il valore di 1
6β = . Analogamente, il parametro γ, è responsabile
della variazione dell’influenza dell’accelerazione all’istante i e quella all’istante i+1 sul cambio di
velocità ed è in generale assunto pari a 1
2.

Per la risoluzione dell’equazione di moto (6.28), assunto 1
4β = , si riscrive la (6.46):
1 12
4 4( )
( )i i i i iu u u u ut t+ += ⋅ − − −
∆ ∆�� � �� (6.47)
che, sostituita nella (6.45), fornisce l’espressione della velocità all’istante i+1:
1
2( )i i i iu u u u
t += ⋅ − −∆
� � ; (6.48)
l’equazione di moto all’istante i+1 è:
1 11 1 i ii iM u C u K u p+ ++ +⋅ + ⋅ + ⋅ =�� � , (6.49)
sostituendo le (6.47) e (6.48) nella (6.49) si ottiene un’espressione in cui l’unica incognita è lo
spostamento 1iu + alla fine dell’intervallo temporale, che può essere scritta nella forma:
1ˆ ˆi ik u p+⋅ = (6.50)
in cui
2
1ˆ( )
k k C Mt t
γβ β
= + ⋅ + ⋅⋅ ∆ ∆
(6.51)
e
1 1ˆ 1
2 2i i i ip p M C u M t ut
γ λβ β β β
= + ⋅ + ⋅ ⋅ + ⋅ + ∆ − ⋅ ⋅∆ � �� (6.52)
Lo spostamento 1iu + può essere calcolato risolvendo la (6.50) che richiede la sola conoscenza di
grandezze che si riferiscono all’intervallo temporale precedente; successivamente la velocità 1iu +�
può essere calcolata dalla (6.48) e l’accelerazione 1iu +�� dalla:

1 111
i iii
C u K u pu
M+ ++
+
− ⋅ − ⋅ +=
�
�� . (6.53)
Sono state quindi definite tutte le grandezze necessarie all’inizio del processo iterativo infatti, noti
la massa, la rigidezza e lo smorzamento dell’oscillatore, noti i valori della forzante ad ogni
intervallo temporale, dalla (6.53) si ottiene 0 0 00
C u K u pu
M
− ⋅ − ⋅ +=�
�� ; definite inoltre le quantità ̂k e
tramite le espressioni (6.51) e (6.52), e le quantità a e b:
1a M C
t
γβ β
= ⋅ + ⋅ ⋅ ∆ (6.54)
11
2 2b M t
λβ β
= ⋅ + ∆ −
(6.55)
è possibile iniziare il processo iterativo e calcolare per ogni passo temporale le grandezze:
ˆ i i i ip p au bu∆ = ∆ + +� �� (6.56)
ˆˆ
ii
pu
k
∆∆ = (6.57)
12i i i iu u u t u
t
γ γ γβ β β
∆ = ∆ − + ∆ − ∆ � � �� (6.58)
2
1 1
( ) 2i i i iu u u ut t
γβ β β
∆ = ∆ − −∆ ∆
�� � �� (6.59)
1i i iu u u+ = + ∆ (6.60)
1i i iu u u+ = + ∆� � � (6.61)
1i i iu u u+ = + ∆�� �� �� (6.62)
Il processo iterativo può così proseguire per ogni passo temporale successivo.
Si consideri a titolo esemplificativo il portale appartenente al sistema spaziale di Figura 6-6. Tale
telaio è costituito da un traverso assunto infinitamente rigido di lunghezza pari a 6 m e due colonne
uguali di altezza pari a 3 m, sezione costituita da un profilo metallico HE160B (il momento
d’inerzia della sezione è pari a J = 2492 cm4 e il modulo elastico dell’acciaio è assunto pari a

210000 N/mm2); si considera un comportamento del materiale elastico lineare mentre le colonne
indeformabili assialmente ma dotate di rigidezza flessionale. L’area d’influenza dei carichi verticali
del telaio in esame risulta pari all’interasse dei telai (4 m) per la luce.
Si assuma a titolo esemplificativo il valore della massa gravante sul traverso pari al peso dei carichi
permanenti (300 kg/m2) sulla relativa area d’influenza che risulta quindi pari a 7200 kg.
Secondo le ipotesi fatte, per la valutazione della risposta sismica, il portale, può essere
schematizzato come un oscillatore semplice avente massa pari a quella del traverso e rigidezza pari
alla rigidezza flessionale delle due colonne il cui unico grado di libertà risulta essere la traslazione
orizzontale del traverso.
Figura 6-6: Schema del portale in esame
Per calcolare la rigidezza delle colonne si applichi alla struttura una forza orizzontale V come
indicato in Figura 6-7. A tale forza corrispondono, alla base delle colonne, le reazioni V1 e V2 e, in
sommità, lo spostamento δ.
Figura 6-7: Schema delle forze agenti sulla struttura

Per l’equilibrio alla traslazione si ottiene:
1 2V +V =V (6.63)
Per l’ipotesi di inestensibilità del traverso, il taglio che si genera nelle colonne è proporzionale alla
rigidezza delle stesse; poiché le colonne hanno la medesima rigidezza flessionale si ottiene:
1 2
VV =V =
2 (6.64)
La freccia orizzontale delle colonne, schematizzate come due mensole doppiamente incastrate e
soggette ad un carico concentrato V1 = V2 è pari a:
1 2
3 3
V V12EJ 12EJ
h h
δ = = (6.65)
è quindi possibile ottenere i valori di V1 e V2 in funzione dello spostamento in sommità:
1 2 3
12EJV = V =
hδ (6.66)
La forza di taglio totale nel portale, V, risulta pari a:
1 2 3
24EJV = V + V =
hδ (6.67)
Poiché la rigidezza della struttura è proporzionale alla forza V secondo la relazione:
V = Kδ ⋅ , (6.68)
la rigidezza della struttura è pari a
4 42
3 3 3
24 210000[ ] 2492 10 [ ]24EJK= 4656
h 3000 [ ]
Nmm kNmm
mm m
⋅ ⋅ ⋅ = =
.

Si calcoli ora il periodo di vibrazione del portale; nota la massa e la rigidezza la pulsazione naturale
della struttura risulta pari a:
25.42 K rad
M sω = =
, (6.69)
la frequenza di vibrazione è pari a:
[ ]4.047 2
f Hzωπ
= = (6.70)
Infine, il periodo di vibrazione, essendo l’inverso della frequenza, risulta di 0.247 secondi.
Si supponga ora che il telaio sia soggetto all’accelerogramma del terremoto di Anza del 1992
rappresentato in Figura 6-8:
Figura 6-8: Accelerogramma del terremoto di Anza del 1992
Attraverso il metodo di Newmark è possibile risolvere l’equazione del moto e calcolare lo
spostamento dell’oscillatore al variare del tempo t, ipotizzando che l’oscillatore sia dotato di uno
smorzamento pari al 5%. Assumendo i parametri 1
4β = e
1
2γ = ed il passo temporale pari
all’intervallo di campionamento dell’accelerogramma (0.005 s) si ottiene la legge oraria dello
spostamento rappresentata graficamente in Figura 6-9.

Figura 6-9: Spostamento al variare del tempo
Poiché il taglio e il momento alla base delle colonne sono legati tra loro e al valore dello
spostamento secondo le equazioni (6.68) e (6.71):
2 2
V hM = ⋅ , (6.71)
i valori massimi di tali sollecitazioni si ottengono in corrispondenza dello spostamento massimo
che, per il portale in esame risulta pari a 0,000128 m. Il taglio e il momento massimo alla base delle
colonne risultano rispettivamente pari a 300 N e 450 Nm come riportato in Figura 6-10.
Figura 6-10: diagramma dell sforzo tagliante e del momento nel portale in esame
6.2 LO SPETTRO DI RISPOSTA ELASTICO
Per il calcolo degli effetti dell’azione sismica sulle strutture non è sempre necessario conoscere
l’intera storia temporale dello spostamento, spesso è sufficiente valutare il massimo effetto del

sisma che, nel caso del sistema ad un grado di libertà, corrisponde al raggiungimento del massimo
spostamento relativo.
Dall’equazione di moto (6.2), poiché in corrispondenza dello spostamento massimo la velocità è
nulla, si ha che:
max
2max
2max
( )
( )
( )
g
g
g
k u M x u
M u M x u
u x u
ω
ω
⋅ = − ⋅ +
⋅ ⋅ = − ⋅ +
⋅ = − +
�� ��
�� ��
�� ��
(6.72)
La quantità 2maxuω ⋅ , che ha dimensioni di un’accelerazione, è detta pseudo-accelerazione e, negli
istanti in cui lo spostamento assume i valori massimi, coincide con l’accelerazione assoluta
dell’oscillatore (se maxu u≠ si ha che 0u ≠� e quindi 2 ( ) 2gu x u uω ξω⋅ = − + − ⋅�� �� � ). Per la seconda
legge di Newton, l’oscillatore soggetto ad un’accelerazione ( )gx u+�� �� è soggetto ad una forza
inerziale proporzionale alla massa per l’accelerazione. Per la (6.72) tale forza è pari a:
2maxF M uω= ⋅ ⋅ (6.73)
Nota F è possibile calcolare le sollecitazioni nella struttura; per il portale di Figura 6-6, la forza F è
pari a 600 N. Considerando tale forza agente nel centro di massa e quindi nel baricentro del
traverso, ne conseguono, alla base delle colonne, un sforzo di taglio e un momento rispettivamente
pari a 300 N e 450 Nm, come ottenuto precedentemente mediante l’analisi dell’intera storia
temporale dello spostamento e riportato in Figura 6-9.
Si supponga ora di voler calcolare lo spostamento massimo per diversi oscillatori, caratterizzati
ognuno da un proprio periodo di vibrazione e da un proprio fattore di smorzamento ma soggetti allo
stesso accelerogramma. I valori degli spostamenti di ogni oscillatore possono essere calcolati
risolvendo di volta in volta l’equazione di moto ottenendone in questo modo l’andamento
temporale. Questa operazione comporta però un elevato onere computazionale e un grande
dispendio di tempo. Poiché, nella maggioranza dei casi, come visto nell’esempio del telaio di
Figura 6-6, è sufficiente la sola conoscenza del massimo valore di spostamento, si può pensare di
diagrammare tale spostamento in funzione del periodo di vibrazione per un assegnato fattore di

smorzamento e accelerogramma (Figura 6-11): tale diagramma prende il nome di spettro di risposta
elastico in termini di spostamento max ( )Sd u t= .
Figura 6-11 – Costruzione del diagramma Spostamento massimo-Periodo
Oltre al diagramma spostamento massimo - periodo, possono essere calcolati gli spettri di risposta
in velocità vS e in accelerazione totale aS definiti rispettivamente dall’espressione (6.74) e dalla
(6.75).
max ( ) vS u t= � (6.74)
2max ( ) ( ) max 2 ( ) ( ) a gS u t x t u t u tξω ω= + = ⋅ + ⋅�� �� � (6.75)
Nella pratica è spesso più semplice fare riferimento a spettri di risposta in pseudo-accelerazione
piuttosto che a spettri di risposta in accelerazione totale essendo direttamente collegati al valore
dello spostamento massimo dell’oscillatore attraverso la relazione:
2max( )pseudoaccelerazioneS u tω= ⋅ (6.76)
Per l’accelerogramma di Figura 6-8, fissato uno smorzamento del 5%, si ottiene lo spettro di
risposta elastico in pseudo-accelerazione riportato in Figura 6-12.

Figura 6-12: Spettro di risposta elastico in pseudo-accelerazione
Si consideri nuovamente il portale di Figura 6-6 che ha un periodo di vibrazione di 0.247 secondi,
dalla conoscenza dello spettro di risposta elastico è possibile calcolare il valore della pseudo-
accelerazione, che risulta di 0.0827 m/s2. Il portale è soggetto ad una forza proporzionale alla massa
per la pseudo-accelerazione e quindi pari a:
27200 [ ] 0.0827 [ / ] 595.5 [N]F kg m s= =i , (6.77)
ne consegue un taglio alla base delle colonne pari / 2F e quindi pari a 297.75 N, risultato
praticamente coincidente con quello ottenuto precedentemente
Lo spettro di risposta elastico è quindi un grafico che diagramma, al variare del periodo e per un
fissato smorzamento, un determinato parametro di risposta di un oscillatore semplice; in Figura
6-13 si riportano, a titolo i esempio, gli spettri di risposta elastici in pseudo-accelerazione, calcolati
per uno smorzamento del 5%, per i terremoti di Anza, Big Bear, Erzincan e del Friuli.

Figura 6-13: Spettri di risposta elastici per i terremoti di Friuli (in alto a sinistra), Erzincan (in alto a destra), Big
Bear(in basso a sinistra), Anza (in basso a destra)
La conoscenza dello spettro di risposta di un dato terremoto permette di ottenere informazioni
rilevanti sugli effetti del terremoto in esame sulle costruzioni. Sovrapponendo gli spettri di risposta
elastici in pseudo-accelerazione riportati in Figura 6-13, come riportato in Figura 6-14, si può
ragionevolmente supporre che il terremoto di Anza abbia indotto accelerazioni maggiori soprattutto
in strutture rigide (con periodo di oscillazione dell’ordine di 0.1 secondi) mentre, il terremoto di
Erzincan, dovrebbe aver sollecitato strutture deformabili, con periodo di oscillazione dell’ordine di
1-2 secondi.

Figura 6-14: Confronto fra diversi spettri di risposta elastici
È facile osservare che, se la pulsazione naturale dell’oscillatore semplice è abbastanza elevata (e
quindi il periodo è basso), l’oscillatore, molto rigido, segue i movimenti del terreno (Figura 6-15,
sinistra): l’accelerazione assoluta, per T = 0, coincide quindi con quella del terreno mentre
spostamento, velocità ed accelerazione relativi sono nulli; viceversa se la pulsazione naturale
dell’oscillatore semplice tende a zero (e quindi il periodo tende a valori sempre più grandi),
l’oscillatore risulta molto deformabile (Figura 6-15, destra) e la massa non risente degli
spostamenti del terreno: lo spostamento relativo coincide, in modulo, con quello assoluto. Vi è poi
una zona intermedia di periodi per i quali il rapporto tra velocità dell’oscillatore semplice e quella
del terreno si può considerare approssimativamente costante.
Figura 6-15: Oscillatore infinitamente rigido (a sinistra) ed estremamente deformabile ( a destra)
Sulla base delle osservazioni appena fatte, è possibile suddividere lo spettro di risposta elastico in
tre zone (vedi Figura 6-16): la prima (compresa fra il periodo T=0 e T=T1) in cui la risposta

strutturale è collegata all’accelerazione del suolo, una seconda (per periodi maggiori di T=T2) in cui
la risposta strutturale è collegata agli spostamenti del suolo e una terza (compresa fra il periodo
T=T1 e T=T2) in cui la risposta strutturale è collegata alla velocità del suolo. I periodi T1 e T2
possono essere stimati rispettivamente in circa 0.5 e circa 3 secondi.
Figura 6-16: Suddivisione dello spettro di risposta in zone proporzionali all'accelerazione, alla velocità e allo
spostamento del suolo
Come detto, gli spettri di Figura 6-13, sono calcolati per uno smorzamento del 5% il cui valore però
varia a seconda del tipo di struttura. In generale i suoi valori, a titolo di esempio, si possono
considerare all’incirca pari al 3%, al 5% e al 7%, rispettivamente per strutture in acciaio saldate, in
cemento armato e in acciaio bullonate per stati tensionali inferiori al 50% della tensione di
snervamento7. Con riferimento alla suddivisione dello spettro di risposta in tre zone (Figura 6-16),
si nota sperimentalmente che gli effetti dello smorzamento tendono ad essere maggiori nella zona in
cui la risposta è proporzionale alla velocità.
Lo smorzamento, riveste un ruolo molto importante in relazione al fenomeno della risonanza:
l’amplificazione della risposta sismica dipende fortemente dal fattore di smorzamento e, se ξ tende
a 0, il fattore di amplificazione tende all’infinito; viceversa, valori anche piccoli dello smorzamento,
contribuiscono a ridurlo sensibilmente. In Figura 6-17 è rappresentato il fattore di amplificazione
della risposta sismica per un smorzamento del 3%, 5% e 7%. Lo smorzamento influisce inoltre in
maniera poco significativa sul periodo di vibrazione dell’oscillatore semplice che è legato al
periodo proprio di un oscillatore non smorzato tramite la relazione:
7 N. M. Newmark, and W. J. Hall, Earthquake Spectra and Design, Earthquake Engineering Research Institute, Berkley, Calif., 1982.

2'
1
TT
ξ=
− (6.78)
Se si considera a titolo esemplificativo uno smorzamento pari al 5%, il periodo T’ dell’oscillatore
smorzato, risulta incrementato solo dello 0,13 % rispetto al periodo T dell’oscillatore non
smorzato8.
Fattore di Amplificazione
0.000
5.000
10.000
15.000
20.000
25.000
30.000
35.000
40.000
45.000
50.000
0.500 0.700 0.900 1.100 1.300 1.500
ω/ωn
A(ω
)
a
1%
3%
5%
7%
Figura 6-17: Fattore di amplificazione per diversi valori dello smorzamento in percentuale rispetto al critico
6.3 LO SPETTRO DI RISPOSTA DI NORMATIVA
Da quanto già detto lo spettro di risposta elastico di un dato terremoto permette di ottenere
informazioni sugli effetti di quel particolare terremoto sulle costruzioni. Si confrontano ora due
spettri di risposta di due differenti terremoti ma registrati sullo stesso sito9.
8 Anil K. Chopra, Dynamics of Structures, Theory and Applications to Earthquake Engineering, 1995, 9 I due spettri analizzati si riferiscono ai terremoti avvenuti nella valle di Hollister in California nel 1961 e nel 1986

Confronto spettri
0
0.1
0.2
0.3
0.4
0.5
0.6
0.00 1.00 2.00 3.00 4.00
Periodo [s]
Pse
udo-
acce
lera
zion
e [g
]
a Hollister 1961
Hollister 1986
Figura 6-18: confronto fra due spettri corrispondenti a terremoti diversi per lo stesso sito
Osservando gli spettri di risposta riportati in Figura 6-18 è immediato notare come la forma dei due
spettri sia notevolmente diversa: lo spettro del terremoto del 1986 presenta un picco di pseudo-
accelerazione in corrispondenza di un periodo molto basso mentre, lo spettro del terremoto del
1961, presenta un andamento più regolare senza evidenti picchi. È chiaro che per avere una
caratterizzazione significativa dell’azione sismica su una costruzione edificata su un determinato
sito, non è sufficiente far riferimento allo spettro di risposta di un solo terremoto ma piuttosto è
necessario definire uno spettro di riferimento stabilito in modo appropriato. Lo strumento che
permette di definire tale spettro è costituito dalla già citata pericolosità sismica la cui stima è basata
sull’analisi della storia locale degli effetti prodotti dai terremoti passati ed è calcolata mediante un
metodo probabilistico.
La pericolosità sismica di un determinato sito, di cui si è iniziato la trattazione nel Capitolo 5, viene
definita in termini di accelerazione orizzontale massima ag attesa in condizioni di campo libero su
sito di riferimento rigido nonché di ordinate dello spettro di risposta elastico in accelerazione con
riferimento a prefissati periodi di ritorno TR. L’attuale fonte di riferimento per il reperimento dei
dati di pericolosità sismica è il sito dell’Istituto Italiano di Geofisica e Vulcanologia10: da tale sito è
possibile ricavare i valori dell’accelerazione ag per varie probabilità di eccedenza in 50 anni,
corrispondenti a diversi periodi di ritorno (TR = 30, 50, 72, 101, 140, 201, 475, 975, 2475 anni);
inoltre, per gli stessi periodi di ritorno, è possibile scaricare anche i dati relativi alle forme spettrali
Sa(T) corrispondenti.
10 http://esse1.mi.ingv.it/

L’intero territorio nazionale è suddiviso mediante una griglia di calcolo (con passo pari a 0,05° in
latitudine e longitudine corrispondenti a circa 5,5 km); per ciascuno dei punti della griglia, ognuno
individuato da un codice numerico (ID), è fornito il valore dell’accelerazione orizzontale massima
ag e le ordinate delle corrispondenti forme spettrali; per le zone che non coincidono con un punto
della griglia è necessario adottare opportune formule di interpolazione. I valori dei parametri di
interesse per la definizione dell’azione sismica possono ad esempio essere calcolati come media
pesata dei valori assunti da tali parametri nei quattro vertici della maglia elementare della griglia di
riferimento contenente il punto in esame, utilizzando come pesi gli inversi delle distanze tra il punto
in questione ed i quattro vertici, attraverso l’espressione:
4i
i=1 i4
i=1 i
pd
p=1d
∑
∑ (6.79)
in cui:
p è il valore del parametro di interesse nel punto in esame,
pi è il valore del parametro di interesse nell’i-esimo punto della maglia elementare contenente il
punto in esame,
di è la distanza del punto in esame dall’i-esimo punto della maglia suddetta.
In Figura 6-19 si riporta l’individuazione dell’accelerazione orizzontale massima ag e delle forme
spettrali per la città di L’Aquila.
Figura 6-19: mappa di pericolosità sismica (sinistra) corrispondente ad una probabilità di eccedenza del 10% e forme
spettrali (destra) per il comune di L'Aquila

Poiché i valori della pericolosità sismica dipendono dalla probabilità di eccedenza (a titolo
esemplificativo in Figura 6-20 si riporta la dipendenza dell’accelerazione orizzontale massima ag
dal periodo di ritorno per la città di L’Aquila), per la definizione dello spettro di riferimento è
necessario fissare tale probabilità e quindi il relativo periodo di ritorno dell’azione sismica.
Figura 6-20: dipendenza di ag dal periodo di ritorno TR
Fissata la probabilità, di eccedenza il periodo di ritorno, secondo la distribuzione della probabilità di
Poisson già illustrata nel Capitolo 5, è legato al periodo di riferimento della costruzione in esame
secondo l’espressione (6.81):
1R
R
R
V
TVP e
−= − (6.80)
dalla quale si ricava l’espressione (6.81) riportata in normativa
ln(1 )R
RR
V
VT
P= −
− (6.81)
dove RVP è la probabilità di superamento e VR è il periodo di riferimento della costruzione:
R U NV C V= ⋅ (6.82)

in cui VN è la vita nominale della costruzione definita in Tabella 6-1.
Tipo di Costruzione VN
1 Opere provvisorie, Opere provvisionali, Strutture in fase costruttiva ≤ 10 anni
2 Opere ordinarie, ponti, opere infrastrutturali e dighe di dimensioni contenute o
di importanza normale
≥ 50 anni
3 Grandi opere, ponti, opere infrastrutturali e dighe di grandi dimensioni o di
importanza strategica
≥ 100 anni
Tabella 6-1: Vita nominale per diversi tipi di opere
Il coefficiente d’uso CU è definito in Tabella 6-2 in relazione alla classe d’uso della costruzione
come definito in Tabella 6-3.
Classe d’uso I II III IV
CU 0.7 1.0 1.5 2.0
Tabella 6-2: Coefficiente d'uso
Classe I Costruzioni con presenza solo occasionale di persone, edifici agricoli.
Classe II Costruzioni il cui uso preveda normali affollamenti, senza contenuti pericolosi per l’ambiente e senza
funzioni pubbliche e sociali essenziali. Industrie con attività non pericolose per l’ambiente. Ponti,
opere infrastrutturali, reti viarie non ricadenti in Classe d’uso III o in Classe d’uso IV, reti ferroviarie
la cui interruzione non provochi situazioni di emergenza. Dighe il cui collasso non provochi
conseguenze rilevanti.
Classe III Costruzioni il cui uso preveda affollamenti significativi. Industrie con attività pericolose per
l’ambiente. Reti viarie extraurbane non ricadenti in Classe d’uso IV. Ponti e reti ferroviarie la cui
interruzione provochi situazioni di emergenza. Dighe rilevanti per le conseguenze di un loro
eventuale collasso.
Classe IV Costruzioni con funzioni pubbliche o strategiche importanti, anche con riferimento alla gestione della
protezione civile in caso di calamità. Industrie con attività particolarmente pericolose per l’ambiente.
Reti viarie di tipo A o B, di cui al D.M. 5 novembre 2001, n. 6792, “Norme funzionali e geometriche
per la costruzione delle strade”, e di tipo C quando appartenenti ad itinerari di collegamento tra
capoluoghi di provincia non altresì serviti da strade di tipo A o B. Ponti e reti ferroviarie di
importanza critica per il mantenimento delle vie di comunicazione, particolarmente dopo un evento
sismico. Dighe connesse al funzionamento di acquedotti e a impianti di produzione di energia
elettrica.
Tabella 6-3: Classi d'uso delle costruzioni

Determinato il periodo di ritorno, per la caratterizzazione dello spettro di riferimento, si procede con
la definizione dei parametri F0 e TC* che vengono determinati imponendo che la forma dello spettro
di riferimento scarti al minimo dalla corrispondente forma spettrale prevista dalla pericolosità
sismica relativa al già fissato periodo di ritorno (Figura 6-21).
Determinazione dei parametri F0 e Tc*
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Periodo [s]
Sa(
T)
[g]
.
Spettro pericolosità
Spettro di rif.
Figura 6-21: determinazione dei parametri F0 e TC*
Lo spettro di riferimento, per come è stato definito finora, è calcolato su un sito orizzontale, in
condizioni di campo libero e per un suolo rigido; per una corretta caratterizzazione dell’azione
sismica è quindi necessario considerare anche gli effetti di amplificazione locale e completare la
definizione della forma dello spettro di riferimento con tali informazioni. Il D.M. 14 Gennaio 2008,
nella definizione dello spettro di riferimento, distingue lo spettro elastico in accelerazione delle
componenti orizzontali dallo spettro elastico in accelerazione della componente verticale. La forma
dello spettro elastico delle componenti orizzontali è definita secondo le espressioni (6.83), (6.84),
(6.85) e (6.86).
00
1( ) 1-g
B B
T TSe T a S F
T F Tη
η
= ⋅ ⋅ ⋅ ⋅ + ⋅ per 0 BT T≤ ≤ (6.83)

0( ) gSe T a S Fη= ⋅ ⋅ ⋅ per B CT T T≤ ≤ (6.84)
0( ) Cg
TSe T a S F
Tη = ⋅ ⋅ ⋅ ⋅
per C DT T T≤ ≤ (6.85)
0 2( ) C D
g
T TSe T a S F
Tη = ⋅ ⋅ ⋅ ⋅
per DT T≤ (6.86)
dove ag, F0 e TC* sono i parametri caratteristici di ogni punto del reticolo e rispettivamente
corrispondono all’accelerazione massima del sito, al valore massimo del fattore di amplificazione
dello spettro in accelerazione orizzontale e al periodo di inizio del tratto a velocità costante.
Il parametro S dato dal prodotto dei fattori SS e ST, è funzione delle caratteristiche del sottosuolo e
delle condizioni topografiche come illustrato in Tabella 6-4 e Tabella 6-5.
Categoria
sottosuolo SS
A 1,00
B 1,00 ≤ 1,40 – 0,40 · F0 · ag/g ≤ 1,20
C 1,00 ≤ 1,70 – 0,60 · F0 · ag/g ≤ 1,50
D 1,00 ≤ 2,40 – 1,50 · F0 · ag/g ≤ 1,80
E 1,00 ≤ 2,00 – 1,10 · F0 · ag/g ≤ 1,60
Tabella 6-4: Determinazione del parametro SS in base alla categoria di sottosuolo
Categoria
topografica Ubicazione dell’opera o dell’intervento ST
T1 - 1,0
T2 In corrispondenza della sommità del pendio 1,2
T3 In corrispondenza della cresta del rilievo 1,2
T4 In corrispondenza della cresta del rilievo 1,4
Tabella 6-5: Determinazione del parametro ST in base alla categoria topografica
Lo spettro elastico in accelerazione delle componenti orizzontali è definito per un fattore di
smorzamento convenzionale del 5%, il parametro η permette di modificare lo smorzamento
attraverso la relazione:

100.55
(5 )η
ξ= ≥
+ (6.87)
in cui ξ è il valore dello smorzamento diverso da quello convenzionale. I valori dei periodi BT , CT
e DT sono definiti dalle espressioni:
3C
B
TT = (6.88)
*C C CT C T= ⋅ (6.89)
4 1.6gD
aT
g
= ⋅ +
(6.90)
in cui g è l’accelerazione di gravità eCC è un parametro relazionato alla categoria di sottosuolo
come riportato in Tabella 6-6:
Categoria sottosuolo CC
A 1,00
B 1,10 · (T*C)-0,20
C 1,05 · (T*C)-0,33
D 1,25 · (T*C)-0,50
E 1,15 · (T*C)-0,40
Tabella 6-6: Determinazione del parametro CC in base alla categoria di sottosuolo
Lo spettro di risposta elastico in accelerazione della componente verticale è così definito:
0
1( ) 1-g V
B B
T TSve T a S F
T F Tη
η
= ⋅ ⋅ ⋅ ⋅ + ⋅ per 0 BT T≤ ≤ (6.91)
( ) g VSve T a S Fη= ⋅ ⋅ ⋅ per B CT T T≤ ≤ (6.92)
( ) Cg V
TSve T a S F
Tη = ⋅ ⋅ ⋅ ⋅
per C DT T T≤ ≤ (6.93)
2( ) C D
g V
T TSve T a S F
Tη = ⋅ ⋅ ⋅ ⋅
per DT T≤ (6.94)

dove VF è il fattore che quantifica l'amplificazione spettrale massima mediante la relazione:
0.5
01.35 gV
aF F
g
= ⋅ ⋅
(6.95)
Per la determinazione dello spettro della componente verticale i valori dei parametri SS , BT , CT e
DT sono definiti in Tabella 6-7;
Categoria sottosuolo SS TB TC TD
A, B, C, D, E 1.0 0.05 s 0.15 s 1.0 s
Tabella 6-7: Determinazione dei parametri SS, TB, TC e TD, per la componente verticale dello spettri di risposta
elastico, in base alla categoria di sottosuolo
Oltre agli spettri in accelerazione, la normativa definisce anche lo spettro di risposta elastico in
spostamento delle componenti orizzontali ( )DeS T , definito dall’espressione:
2
( ) ( )2De
TS T Se T
π = ⋅
(6.96)
a patto che il periodo non ecceda i valori di TE indicati in Tabella 6-8:
Categoria sottosuolo TE TF
A 4.5 10.0
B 5.0 10.0
C, D, E 6.0 10.0
Tabella 6-8: Valori del parametro TE
Per valori eccedenti TE le ordinate dello spettro di risposta elastico in spostamento delle componenti
orizzontali possono essere determinate tramite le espressioni:
( )0 0( ) 0.025 1 EDe g C D
F E
T TS T a S T T F F
T Tη η
−= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ + − ⋅ ⋅ − per E FT T T≤ ≤ (6.97)
( )DeS T dg= per FT T> (6.98)

in cui
0.16 g Cdg a S T= ⋅ ⋅ ⋅ (6.99)
A titolo esemplificativo si determinano gli spettri elastici previsti dalla normativa per un edificio
scolastico nel comune di Bagnone (MS) con l’ausilio dello schema riportato in Tabella 6-9.
1) Scelta della probabilità di eccedenza PVR
2) Determinazione del periodo di ritorno dell’azione sismica TR
3) Determinazione dei parametri di pericolosità sismica ag, F0 e TC*
4) Calcolo dello spettro elastico in accelerazione delle componenti orizzontali
5) Calcolo dello spettro elastico in accelerazione della componente verticale
6) Calcolo dello spettro elastico in spostamento delle componenti orizzontali
Tabella 6-9: procedura di calcolo degli spettri elastici secondo normativa
Si consideri una probabilità di superamento
RVP pari al 10%; poiché la costruzione rientra nella
classe d’uso III il coefficiente CU è pari a 1.5, considerando poi una vita nominale pari a 50 anni si
ottiene un periodo di riferimento VR pari a 75 anni e un periodo di ritorno di 712 anni; possono
essere quindi determinati ag, F0 e TC* :
ag 0,230g
F0 2,414
TC* 0,282 secondi
Tabella 6-10: determinazione dei parametri ag, F0 e TC* per il comune di Bagnone e per un periodo di ritorno pari a
712 anni
In Figura 6-22 si riporta la mappa di pericolosità sismica per un periodo di riferimento di 50 anni e
una probabilità di eccedenza del 10%.

Figura 6-22: mappa di pericolosità sismica per il comune di Bagnone (MS) per una probabilità di eccedenza pari al
10% in un periodo di riferimento di 50 anni
Considerando un suolo di categoria A e una categoria topografica T1 si ottiene per il parametro S
un valore pari a 1,0 e per il parametro CC un valore pari a 1.0; si determinano quindi i periodi TB,
TC e TD:
TB 0,094 secondi
TC 0,282 secondi
TD 2,522 secondi
Tabella 6-11: Determinazione dei periodi TB, TC e TD
In Figura 6-23 si riporta lo spettro di risposta elastico in accelerazione delle componenti orizzontali
per l’edificio in esame.
Spettro di risposta elastico in accelerazione per la componente orizzontale
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.000 0.500 1.000 1.500 2.000 2.500 3.000 3.500 4.000
T
Se(
T)
d
Figura 6-23: Spettro di risposta elastico in accelerazione per la componente orizzontale per la costruzione in esame

In Figura 6-24 si riporta lo spettro di risposta elastico in accelerazione della componente verticale.
Spettro di risposta elastico in accelerazione per la componente verticale
0.000
0.050
0.100
0.150
0.200
0.250
0.300
0.000 0.500 1.000 1.500 2.000 2.500 3.000 3.500 4.000
T
Sve
(T)
a
Figura 6-24: Spettro di risposta elastico in accelerazione per la componente verticale per la costruzione in esame
In Figura 6-25 si riporta lo spettro di risposta elastico in spostamento delle componenti orizzontali.
Spettro di risposta elastico in spostamento delle componenti orizzontali
0
0.002
0.004
0.006
0.008
0.01
0.012
0 0.5 1 1.5 2 2.5 3 3.5 4
T
SDe (T
)
a
Figura 6-25: Spettro di risposta elastico in spostamento per le componenti orizzontali per la costruzione in esame













![«Democratizzazione» dell’azione amministrativa e forme di ... fileÁ Á Á X } À } ] } P } u . X ] «Democratizzazione» dell’azione amministrativa e forme di semplificazione](https://static.fdocumenti.com/doc/165x107/5c730b4709d3f25c278c6bf4/democratizzazione-dellazione-amministrativa-e-forme-di-a-a-x-a.jpg)

