Capitolo 11 (parte I) - Sistemi 2D - Libero...
27
Appunti di Appunti di Elaborazione numerica dei segnali Elaborazione numerica dei segnali Capitolo 11 (parte I) - Capitolo 11 (parte I) - Sistemi 2D Introduzione ............................................................................................... 1 Singolarità per i sistemi a due dimensioni .................................................. 2 Descrizione dei sistemi lineari in 2D .......................................................... 5 Filtri bidimensionali ................................................................................... 8 Funzioni cilindriche .................................................................................... 8 Autofunzioni per un sistema 2D lineare spazio-invariante ........................ 10 “Forma” delle sinusoidi in 2D .................................................................. 13 Trasformazione di Fourier in 2D .............................................................. 15 Osservazione: trasformata di Fourier 2D in coordinate polari ........... 16 Formula di antitrasformazione in coordinate cartesiane e polari ....... 17 Proprietà della trasformata di Fourier ....................................................... 18 Proprietà di rotazione nel dominio (x,y) ............................................. 18 Trasformata di una funzione separabile .............................................. 19 Trasformata di funzioni a simmetria circolare .................................... 20 Trasformata della proiezione di una funzione ..................................... 21 Esempi di trasformate bidimensionali ....................................................... 23 I NTRODUZIONE Non sempre i sistemi con cui abbiamo a che fare si prestano ad essere descritti tramite segnali monodimensionali. Anzi, potremmo dire il contrario, ossia che la maggior parte dei sistemi, se descritti in modo accurato, risultano essere bidimensionali. Un esempio classico di segnale monodimensionale è il segnale telefonico, del quale abbiamo parlato nel capitolo precedente. Se invece pensiamo al segnale televisivo, allora la cosa si fa più complicata: una immagine è un tipico segnale bidimensionale, in quanto necessita di una descrizione dei vari punti (pixel) in termini di coordinata orizzontale e coordinata verticale; un segnale televisivo è una successione temporale di immagini, per cui può essere considerato addirittura come un segnale tridimensionale f(x,y,t), dato che le variabili in gioco sono la coordinata orizzontale, quella verticale ed il tempo; tale segnale, però, diventa nuovamente monodimensionale nel momento in cui decidiamo (come si fa nella realtà) di scandire le righe dell’immagine una di seguito all’altra:
Transcript of Capitolo 11 (parte I) - Sistemi 2D - Libero...

Appunti diAppunti diElaborazione numerica dei segnaliElaborazione numerica dei segnali
Capitolo 11 (parte I) - Capitolo 11 (parte I) - Sistemi 2D
Introduzione ............................................................................................... 1Singolarità per i sistemi a due dimensioni .................................................. 2Descrizione dei sistemi lineari in 2D .......................................................... 5Filtri bidimensionali ................................................................................... 8Funzioni cilindriche.................................................................................... 8Autofunzioni per un sistema 2D lineare spazio-invariante ........................ 10“Forma” delle sinusoidi in 2D .................................................................. 13Trasformazione di Fourier in 2D .............................................................. 15
Osservazione: trasformata di Fourier 2D in coordinate polari ........... 16Formula di antitrasformazione in coordinate cartesiane e polari ....... 17
Proprietà della trasformata di Fourier ....................................................... 18Proprietà di rotazione nel dominio (x,y) ............................................. 18Trasformata di una funzione separabile.............................................. 19Trasformata di funzioni a simmetria circolare .................................... 20Trasformata della proiezione di una funzione ..................................... 21
Esempi di trasformate bidimensionali....................................................... 23
INTRODUZIONE
Non sempre i sistemi con cui abbiamo a che fare si prestano ad essere descritti tramite segnalimonodimensionali. Anzi, potremmo dire il contrario, ossia che la maggior parte deisistemi, se descritti in modo accurato, risultano esserebidimensionali.
Un esempio classico di segnale monodimensionale è il segnale telefonico, del quale abbiamoparlato nel capitolo precedente. Se invece pensiamo al segnale televisivo, allora la cosa si fa piùcomplicata: una immagine è un tipico segnale bidimensionale, in quanto necessita di unadescrizione dei vari punti (pixel) in termini di coordinata orizzontale e coordinata verticale; unsegnale televisivo è una successione temporale di immagini, per cui può essere consideratoaddirittura come un segnale tridimensionale f(x,y,t), dato che le variabili in gioco sono la coordinataorizzontale, quella verticale ed il tempo; tale segnale, però, diventa nuovamente monodimensionalenel momento in cui decidiamo (come si fa nella realtà) di scandire le righe dell’immagine una diseguito all’altra:

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli2
Questo è il segnale che giunge all’antenna del nostro televisore ed è evidentemente un segnalemonodimensionale.
La descrizione torna ad essere bidimensionale quando, per esempio, andiamo a valutare lacorrelazione esistente tra punti omologhi di due righe diverse (all’interno dello stesso quadro), alfine di fornire una migliore descrizione dell’immagine oppure al fine di utilizzare algoritmi dicompressione (MPEG) per ridurre il bit rate necessario alla trasmissione.A voler essere proprio rigorosi, il segnale televisivo dovrebbe
essere un segnale a 4 dimensioni: infatti, le scene che vengono riprese sono sempretridimensionali e la successione temporale di tali scene è dunque un segnale quadri-dimensionale.Tuttavia, una telecamera che riprende una scena si occupa di conservareed eventualmente trasmettere solo la proiezione di tale scena (3D)su un piano (2D) corrispondente al televisore, per cui il segnalediventa tridimensionale.
In generale, comunque, il passaggio da sistemi monodimensionali a sistemi bidimensionali èsemplice: nel primo caso consideriamo funzioni e sistemi che dipendono da una sola variabiledipendente (tipicamente il tempo, ma in realtà può trattarsi di qualsiasi cosa), mentre nel secondocaso le variabili dipendenti diventano due. Le indicheremo tipicamente con x ed y:
Sistema2D
f(x,y) u(x,y)
Un sistema è bidimensionale quando dipende da 2 variabili sia perquanto riguarda il proprio funzionamento interno sia per quantoriguarda l’interazione con l’esterno, che avviene tramite i segnalidi ingresso e di uscita.
Questo passaggio da una a due dimensioni non comporta, come vedremo, gravi problemi perquanto riguarda il trattamento dei segnali, salvo ovviamente maggiori costi computazionali emaggiore memoria richiesti ai sistemi di calcolo.
Una conseguenza intuitiva è che, laddove si renda necessario utilizzare delle equazionidifferenziali per la descrizione di un sistema, saranno necessarie delle derivate parziali (rispetto ad xe rispetto ad y) e non più delle derivate totali.
Un’altra conseguenza riguarda il teorema fondamentale dell’algebra: avendo a che fare con deipolinomi di due variabili, tale teorema non è più applicabile, il che significa, sostanzialmente, chedifficilmente potremo scindere un sistema 2D nella cascata di più sistemi 2D elementari, il cherappresenta una complicazione che invece nei sistemi monodimensionali riuscivamo spesso adeliminare.
SINGOLARITÀ PER I SISTEMI A DUE DIMENSIONI
Una prima differenza significativa tra i sistemi 2D ed i sistemi 1D riguarda le cosiddettesingolarità: per i sistemi monodimensionali, abbiamo fatto largo uso della funzione impulsiva δ(t),che abbiamo visto essere molto utile in quanto consente di ottenere una descrizione dei sistemilineari in termini di risposta all’impulso h(t); passando in un mondo a due dimensioni, esiste ancorauna funzione impulso bidimensionale (volgarmente detto spillo), indicata con f(x,y)=δ(x,y), maesiste anche il cosiddetto impulso in una dimensione (altrimenti detto lama o discontinuità a

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli3
muraglia), che sarà del tipo f(x,y)=δ(x) oppure g(x,y)=δ(y). La differenza tra i due tipi di impulsi èrappresentata nella figura seguente:
f(x,y)
x
y
)y,x(δ
f(x,y)
x
y
)x(δ
Nella figura di sinistra c’è un impulso bidimensionale δ(x,y) posizionato nell’origine, mentrenella figura di destra c’è un impulso δ(x), che non dipende dalla variabile y e corrisponde ad unamuraglia posizionata quindi in corrispondenza dell’asse y.
E’ ovvio che questi sono due casi particolari, in quanto potremmo avere tali impulsi situati inposizione qualsiasi sul piano (x,y):
( ) ( ) ( )0000 yy , xx , yy,xx −δ−δ−−δ
Non solo, ma se consideriamo gli impulsi dipendenti da una sola variabile, le muraglie possonoanche essere storte, ossia giacere su qualunque direzione del piano (x,y) o, più in generale, su unaqualsiasi curva di tale piano: in questo caso, se la suddetta curva è descritta da una equazione deltipo a(x,y)=0, allora l’espressione analitica dell’impulso sarà
[ ])y,x(a)y,x(f δ=
Un esempio banale è quello rappresentato nella figura seguente:
f(x,y)
x
y
a(x,y)=0
[ ])y,x(aδ
Un’altra possibilità è quella di singolarità a lama che siano disposte su una precisa direzione, maabbiano altezza variabile: ad esempio, se consideriamo la funzione
)y()x(a)y,x(f δ⋅=
abbiamo una lama diretta lungo l’asse x e di altezza a(x). Ad esempio, se a(x) fosse una funzionemonotona crescente, avremmo impulsi disposti sull’asse x e la cui ampiezza cresce con x.

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli4
E’ chiaro, a questo punto, che, mentre gli impulsi bidimensionali del tipo( )00 yy,xx −−δ hanno una corrispondenza negli impulsi classici
monodimensionali, gli impulsi bidimensionali del tipo δ(a(x,y)) nonhanno tale corrispondenza.
Esprimendoci adesso in termini ancora più rigorosi, diamo la definizione analitica di impulso indue dimensioni. A tal proposito, cominciamo col ricordare che l’impulso δ(t) monodimensionalenon è propriamente una funzione, ma una distribuzione; ciò significa che esso ha senso solo se sitrova all’interno di un integrale: infatti, la definizione rigorosa del δ(t) fa riferimento a quelparticolare segnale tale che
)0(fdt)t(f)t( =δ∫+∞
∞−
Questa relazione deriva dal fatto che δ(t) è un impulso, centrato in t=0, di base infinitesima e diarea infinita.
Naturalmente, possiamo anche spostare l’impulso, applicandolo, anziché in t=0, in un genericoistante τ:
)(fdt)t(f)t( τ=τ−δ∫+∞
∞−
Quest’ultima relazione è proprio la definizione rigorosa di un impulso monodimensionale.Definizione assolutamente analoga vale nel caso bidimensionale, dove le variabili di integrazione
sono due e quindi l’integrale è doppio:
)y,x(fdxdy)y,x((f)yy,xx( 0000 =−−δ∫ ∫+∞
∞−
+∞
∞−
Quindi, anche nel caso 2D, moltiplicare una funzione per un impulsobidimensionale e integrare equivale a prelevare il valore dellafunzione nel punto di applicazione dell’impulso.
Una particolarizzazione di questa formula si ha evidentemente quando l’impulso 2D è piazzatonell’origine (x0=0, y0=0):
)0,0(fdxdy)y,x((f)y,x( =δ∫ ∫+∞
∞−
+∞
∞−
Esiste un legame molto stretto tra l’impulso bidimensionale del tipo δ(x,y) e le discontinuità amuraglia δ(x) e δ(y): risulta infatti che
)y()x()y,x( δ⋅δ=δ
Questa relazione dice che l’impulso in 2D è una funzione separabile, proprio perché è unafunzione di due variabili che però è esprimibile come prodotto di due funzioni, ciascuna dipendenteda una sola variabile.
Questa definizione vale chiaramente anche per funzioni che non siano impulsive: in generale, unafunzione f(x,y) si dirà separabile se è possibile trovare due funzioni a(x) e b(y) tali che
)y(b)x(a)y,x(f ⋅=

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli5
Come si vedrà nei prossimi discorsi, la separabilità di funzioni ed operatori consente non solonotevoli semplificazioni matematiche ma anche di estendere ai sistemi 2D molti concetti cheabbiamo studiato per i segnali in una dimensione.
Tornando invece alla separabilità dell’impulso δ(x,y), abbiamo dunque visto che esso èinterpretabile come il prodotto tra due muraglie, una giacente sull’asse x ed una giacente sull’asse y.Applichiamo questa proprietà alla definizione di impulso vista prima: abbiamo che
)y,x(fdy)y,xx(f)yy(
dydx)y,x(f)xx()yy(dxdy)y,x(f)yy()xx(dxdy)y,x(f)yy,xx(
0000
000000
=−−δ=
=
−δ−δ=−δ−δ=−−δ
∫
∫ ∫∫ ∫∫ ∫∞+
∞−
+∞
∞−
+∞
∞−
+∞
∞−
+∞
∞−
+∞
∞−
+∞
∞−
Abbiamo mostrato che la separabilità dell’impulso è perfettamente congruente con la definizione,il che in pratica dimostra la separabilità.
Non solo, ma si può notare un’altra cosa: nei passaggi matematici appena effettuati, abbiamosfruttato la separabilità dell’impulso per ricondurre un integrale doppio a due integrali singoli: adesempio, nel secondo passaggio ci siamo trovati con l’integrale
∫+∞
∞−
−δ dx)y,x(f)xx( 0
ed abbiamo detto che esso corrisponde a f(x0,y). Questa è un’altra proprietà importante:moltiplicare una funzione f(x,y) per una singolarità a lama δ(x-x0) epoi integrare equivale a calcolare l’integrale di linea di f(x,y),ossia intersecare f(x,y) con un piano passante per x=x0 e paralleloall’asse y e considerare l’intersezione f(x0,y). Identico discorso vale,ovviamente, se moltiplichiamo f(x,y) per δ(y-y0) e poi integriamo: otteniamo f(x,y0), ossial’intersezione tra f(x,y) ed un piano passante per y0 e parallelo all’asse x.
DESCRIZIONE DEI SISTEMI LINEARI IN 2DSulla falsa riga degli stessi discorsi visti a suo tempo per i segnali monodimensionali, usiamo il
concetto di funzione impulsiva in 2D per dare una descrizione il più compatta possibile dei sistemi in2D.
Nel caso monodimensionale, l’impulso è stato utile in quanto abbiamo osservato che unaqualunque funzione f(t) è descrivibile come successioni di infiniti impulsi (ciascuno di area pari alvalore che la funzione di partenza assume in corrispondenza di ciascun impulso); questo ci haconsentito di descrivere il comportamento di un qualunque sistema lineare mediante la sua rispostaall’impulso h(t,τ): infatti, applicando la sovrapposizione degli effetti, dalla h(t,τ) possiamo risalirealla risposta ad una qualsiasi funzione in ingresso, semplicemente facendo una opportunacombinazione lineare di impulsi.
In modo del tutto analogo possiamo procedere per un sistema bi-dimensionale. Infatti,consideriamo nuovamente la definizione di impulso 2D vista prima:
)y,x(fdxdy)y,x(f)yy,xx( 0000 =−−δ∫ ∫+∞
∞−
+∞
∞−

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli6
Possiamo fare un cambio di variabili: poniamo x=η, y=ε, x0=x ed y0=y, in modo che la relazionediventi
)y,x(fdd)y,x(),(f =εη−ε−ηδεη∫ ∫+∞
∞−
+∞
∞−
Questa relazione dice appunto che la funzione f(x,y) è esprimibile come somma(bidimensionale) di infiniti impulsi bidimensionali1, opportunamentepiazzati nel piano, di area pari al valore che la funzione assumenei vari punti. Abbiamo cioè la stessa scomposizione che avevamo nel casomonodimensionale: di conseguenza, tutte le volte che avremo a che fare con un sistema 2D lineare,potremo applicare la sovrapposizione degli effetti e quindi, nota la risposta all’impulso delsistema, saremo sempre in grado di calcolare la risposta del sistema a qualsiasi sollecitazione iningresso, in quanto potremo scomporre quest’ultima come opportuna combinazione di impulsi econsiderare l’uscita come combinazione delle risposte a tali impulsi.
La simbologia che adotteremo sarà la seguente:
Sistema 2Dlinearef(x,y) u(x,y)
),( εηδ ),;y,x(h εη
La risposta all’impulso del generico sistema lineare sarà dunque ),;y,x(h εη e sarà appunto la
risposta che questo sistema produce quanto in ingresso è sollecitato dal segnale δ(η,ε).Se la sollecitazione in ingresso f(η,ε) non è impulsiva, potremo sempre scomporla in somma di
opportuni impulsi: in uscita avremo la somma delle corrispondenti risposte impulsive, il chesignifica che potremo valutare tale uscita come
∫ ∫+∞
∞−
+∞
∞−
εηεηεη= dd),;y,x(h),(f)y,x(u
E’ bene sottolineare che la linearità del sistema garantisce solo che, in uscita, sia possibilecombinare le risposte ai singoli impulsi per ottenere l’uscita complessiva. Questo, però, non significache la risposta del sistema sia la stessa qualunque sia la posizione dell’impulso in ingresso: infatti,come indicato nel simbolo ),;y,x(h εη , la funzione di risposta all’impulso dipende sia dal punto (x,y)
in cui si misura l’uscita sia dal punto (η,ε) in cui è posizionato l’impulso in ingresso. Si parla inquesto caso di sistemi spazio-varianti.
Un esempio concreto banale è quello del suono che si ottiene battendo una lastra metallica nonuniforme: il suono generato dipende strettamente dalla posizione del punto di percussione.
1 D’ora in poi, parlando di impulsi, ci riferiremo sempre implicitamente ad impulsi bidimensionali, per cui la bidimensionalità sarà
sempre sottintesa

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli7
Al contrario, quando il sistema considerato è spazio-invariante2, allora la risposta del sistemadipende solo dalla distanza relativa tra i punti (x,y)e (η,ε). In altre parole, la risposta all’impulsoδ(x,y) diventa adesso del tipo )y,x(h),;y,x(h −ε−η=εη , il che significa che l’ultima formula puòessere riscritta nella forma
∫ ∫+∞
∞−
+∞
∞−
εη−ε−ηεη= dd)y,x(h),(f)y,x(u
A ben guardare, questo integrale è semplicemente la convoluzione bidimensionale tra lefunzioni f ed h; indicando tale operatore con il simbolo **, possiamo dunque concludere che larisposta u(x,y) di un sistema lineare spazio-invariante ad un generico segnale f(x,y) in ingressoè data da
)y,x(h**)y,x(f)y,x(u =
dove l’operazione da eseguire è quella dell’integrale doppio dell’ultima formula.Un caso molto particolare è quello che si ha quando h(η-x,ε-y)=δ(η-x,ε-y), in quanto ritroviamo
esattamente la definizione dell’impulso bidimensionale: la convoluzione bidimensionale tra unafunzione ed un impulso dà come risultato la funzione portata nel punto di applicazione dell’impulso:
)y,x(fdd)y,x(),(f =εη−ε−ηδεη∫ ∫+∞
∞−
+∞
∞−
Possiamo inoltre fare due esempi molto semplici, ma anche molto significativi, di convoluzionebidimensionale tra due funzioni:
• se convolviamo due lame finite ortogonali, otteniamo un prisma rettangolare:
2 Sarebbe l’analogo della tempo-invarianza nei classici sistemi monodimensionali

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli8
• se convolviamo due sinc ortogonali, otteniamo un sinc bidimensionale, comunementeindicato con sinc2D:
FILTRI BIDIMENSIONALI
Osserviamo che, utilizzando la stessa terminologia usata nel caso bidimensionale, definiremofiltro 2D un qualsiasi sistema 2D che sia lineare spazio-invariante.Abbiamo visto prima che l’uscita u(x,y) di tale sistema, in risposta ad un generico ingresso f(x,y), èdata da
∫ ∫+∞
∞−
+∞
∞−
εη−ε−ηεη= dd)y,x(h),(f)y,x(u
Questa espressione mostra dunque un filtraggio bidimensionale del segnale f(x,y).
FUNZIONI CILINDRICHE
Una funzione bidimensionale f(x,y) che dipende solo da una variabile è detta funzionecilindrica. Un esempio di funzione cilindrica è stato già visto ed è l’impulso del tipo f(x,y)=δ(x) og(x,y)=δ(y). In generale, però, questa definizione vale per una qualunque funzione f(x,y): adesempio, la funzione f(x,y)=a(x) è costante nella direzione y (detta direzione di cilindricità).
E’ anche cilindrica la funzioneθ−θ= ysincosx)y,x(g
In questo caso, però, la cilindricità non è rispetto ad x o ad y, ma rispetto alla retta che formal’angolo θ con l’asse y.
Le funzioni cilindriche sono importanti perché godono della seguente proprietà: convolvendouna funzione qualsiasi con una funzione cilindrica si ottiene ancorauna funzione cilindrica e con la stessa direzione di cilindricità.

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli9
Verifichiamo questa proprietà nel caso in cui la funzione cilindrica in questione sia la rispostaall’impulso di un sistema 2D lineare spazio-invariante: ciò significa che tale funzione sarà, adesempio, nella forma h(x), se l’asse di cilindricità è l’asse y. Calcoliamo allora la risposta del sistemaad un generico ingresso f(x,y), il che significa calcolare la convoluzione di f(x,y) con h(x):
∫ ∫∫ ∫+∞
∞−
+∞
∞−
+∞
∞−
+∞
∞−
η
εεηη−=εηη−εη= dd),(f)x(hdd)x(h),(f)y,x(u
Questi passaggi mostrano evidentemente che la funzione u(x,y) non dipende dalla coordinata y,per cui è anch’essa cilindrica e con direzione di cilindricità coincidente con l’asse y.
Non solo, ma una diretta conseguenza di ciò è che la risposta del sistema all’ingresso f(x,y) ècalcolabile come quella di un sistema intrinsecamente monodimensionale, con funzione di rispostaall’impulso h(x), all’ingresso del quale non viene però mandato f(η,ε), ma il segnale
∫+∞
∞−
εεη=η d),(f)(f X,P
Quell’integrale prende il nome di proiezione della funzione f(x,y) sull’asse x.Quindi
∫+∞
∞−
ηηη−= d)(f)x(h)y,x(u X,P
Possiamo dunque concludere quanto segue: se un sistema 2D lineare spazio-invariante ha una funzione di risposta all’impulso h(x,y) asimmetria cilindrica su una data direzione, la sua risposta algenerico ingresso f(x,y) è calcolabile come quella di un sistemaintrinsecamente monodimensionale, con funzione di rispostaall’impulso h(x,y), all’ingresso del quale non viene mandato f(x,y),ma la sua proiezione sulla direzione ortogonale all’asse dicilindricità. L’asse di cilindricità di h(x,y) può essere qualsiasi. Se si tratta, per esempio,dell’asse x, abbiamo che
∫
∫ ∫∫ ∫∫ ∫∞+
∞−
+∞
∞−
+∞
∞−
+∞
∞−
+∞
∞−
+∞
∞−
+∞
∞−
εεε−=
=ε
ηεηε−=εηε−εη=εηε−η−εη=
d)(f)y(h
dd),(f)y(hdd)y(h),(fdd)y,x(h),(f)y,x(u
Y,P
In questo caso, è stata considerata la proiezione della funzione f(x,y) sull’asse y:
∫+∞
∞−
ηεη=ε d),(f)(f Y,P
Questo discorso di poterci ricondurre da un sistema bidimensionale ad un sistemamonodimensionale diventa ancora più importante in un altro contesto: supponiamo, infatti, che lafunzione di risposta all’impulso h(x,y) del nostro sistema lineare tempo-invariante sia separabile, ilche significa che possiamo esprimerla nella forma

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli10
)x(h)x(h)y,x(h 21 ⋅=
Calcoliamo la risposta del sistema al generico ingresso:
∫ ∫
∫ ∫∫ ∫∞+
∞−
∞+
∞−
+∞
∞−
+∞
∞−
+∞
∞−
+∞
∞−
ε
ηη−εηε−=
=εηε−η−εη=εηε−η−εη=
dd)x(h),(f)y(h
dd)y(h)x(h),(fdd)y,x(h),(f)y,x(u
12
21
L’integrale tra parentesi quadre è la convoluzione monodimensionale tra la funzione h1(x) e lafunzione f(η,ε), nella quale ε è un parametro. Si tratta perciò dell’uscita di un sistema lineare tempo-invariante monodimensionale, con risposta all’impulso h1(x), eccitato in ingresso dal segnale f(η,ε),in cui ε è un parametro. Indichiamo l’uscita di tale sistema con u1(ε,x):
∫∫+∞
∞−
+∞
∞−
εεε−=→ηη−εη=ε d)x,(u)y(h)y,x(ud)x(h),(f)x,(u 1211
Abbiamo ottenuto un secondo integrale, che è la convoluzione monodimensionale tra la funzioneh2(y) e la funzione u1(ε,x). Si tratta perciò dell’uscita del sistema h2(y) sollecitato in ingresso dalsegnale u1(ε,x).
AUTOFUNZIONI PER UN SISTEMA 2D LINEARE SPAZIO-INVARIANTE
Nei precedenti paragrafi abbiamo introdotto il concetto di convoluzione bidimensionale:
∫ ∫+∞
∞−
+∞
∞−
εηε−η−εη= dd)y,x(h),(f)y,x(u
Vogliamo capire come va calcolata questa convoluzione.Se pensiamo al caso monodimensionale, ci ricordiamo che, per effettuare la convoluzione tra due
segnali, ci basta ribaltarne uno, moltiplicarlo punto a punto con l’altro e sommare i risultati (seconsideriamo segnali continui, allora la somma è un integrale).
Nel caso bidimensionale dobbiamo fare qualcosa di analogo: nell’ultima espressione, infatti, sinota che possiamo lasciare f(x,y) così com’è, mentre dobbiamo ribaltare la risposta all’impulso delsistema rispetto sia all’asse x sia all’asse y. Un esempio di tale ribaltamento è riportato nella figuraseguente, nella quale viene riportato semplicemente il dominio della funzione da ribaltare (figura asinistra) e il corrispondente dominio ribaltato (figura a sinistra):
x
y
x
y

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli11
Una volta effettuato il ribaltamento della risposta all’impulso, possiamo moltiplicarla per ilsegnale in ingresso e integrare il prodotto (bidimensionalmente). Il risultato è la risposta del sistemaall’ingresso assegnato.
C’è però un problema: il problema della convoluzione (sia nel caso 1D siain quello 2D) è che essa effettua una media pesata di più valoridell’ingresso, in quanto è rappresentativa del fatto che il sistemaha memoria3; nel caso monodimensionale, tale media coinvolge un certo numero di campioniprecedenti quello attuale; nel caso bidimensionale, invece, la media coinvolge i valori dell’ingressonell’intorno del punto (x,y) considerato. Questa memoria del sistema ci dà problemi in quanto creaun accoppiamento tra gli impulsi in cui abbiamo scomposto: detto in altre parole, questo è il motivoper cui, sollecitando il sistema con un impulso, la risposta non è a sua volta un impulso, il che si puòanche esprimere dicendo che l’impulso non è una autofunzione del sistema.
Nel caso monodimensionale, siamo allora andati alla ricerca di segnali che fossero autofunzioniper i sistemi lineari tempo-invarianti e abbiamo appurato che a tale requisito rispondono lesinusoidi. Stessa cosa dobbiamo fare nel caso bidimensionale: dobbiamo ricercareautofunzioni del sistema, cioè funzioni che, poste in ingresso,risultano uguali in uscita salvo un fattore moltiplicativo complesso(indice di una variazione sia di ampiezza sia di fase). Se troviamo questeautofunzioni, allora potremo disaccoppiare le varie componenti: potremo cioè scomporre il segnaledi uscita in termini ciascuno dei quali dipende solo dal corrispondente termine in ingresso (oltre chedalle caratteristiche del sistema).
E’ intuitivo aspettarsi che autofunzioni nel caso 2D siano una generalizzazione delle sinusoidi nelcaso 1D. Nel caso monodimensionale, consideravamo sinusoidi complesse, esprimibili perciò come
tje ω ; nel caso bidimensionale, invece, consideriamo sinusoidi complesse bidimensionali, la genericadelle quali è definita come
( )yxj YXe ω+ω
In questa funzione, le quantità ωX ed ωY sono l’analogo della pulsazione nel dominiomonodimensionale, ma è bene sottolineare che le dimensioni di tali variabili non sono più i rad/sec,che valevano solo quando il dominio di partenza era quello del tempo4. Chiamiamo allora questevariabili come numeri d’onda (o anche pulsazioni spaziali) e le indichiamo, per evitareconfusione, con kX e kY:
( )ykxkj YXe +
Un grosso pregio di questa funzione (sinusoide complessa bidimensionale) è chiaramentela separabilità: possiamo infatti scrivere che
( ) yjkxjkykxkj YXYX eee ⋅=+
Abbiamo dunque trovato che una sinusoide complessa bidimensionale è banalmente data dalprodotto di due sinusoidi complesse monodimensionali. Vedremo più avanti quale implicazionevenga da questa proprietà per quanto riguarda l’andamento grafico di tali funzioni.
3 Se il sistema non avesse memoria, la risposta all’impulso sarebbe impulsiva e l’uscita si calcolerebbe banalmente moltiplicando
l’ingresso per una costante).
4 Ad ogni modo, se una, tra le variabili x ed y, corrisponde al tempo, allora la corrispondente ω sarà rigorosamente una pulsazione,misurata cioè in rad/sec

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli12
Possiamo invece osservare subito che la separabilità viene dal fatto di aver considerato sinusoidicomplesse. Se invece considerassimo sinusoidi reali, la separabilità verrebbe meno: infatti
)yk(sin)xk(sin)ykxk(sin YXYX ⋅≠+
Tornando ora al discorso di prima, ci interessa innanzitutto verificare se, in effetti, questesinusoidi complesse sono delle autofunzioni per un generico sistema lineare spazio-invariante conrisposta all’impulso h(x,y). Dobbiamo semplicemente calcolare la risposta del sistema alla genericasinusoide e verificare se in uscita si ha ancora una sinusoide oppure no. Ricordiamo intanto che, peril nostro sistema la risposta al generico ingresso è
∫ ∫+∞
∞−
+∞
∞−
εηε−η−εη= dd)y,x(h),(f)y,x(u
D’altra parte, è facile verificare che anche la convoluzione bidimensionale è commutativa (bastafare un cambio di variabili), per cui quella espressione equivale anche a
∫ ∫+∞
∞−
+∞
∞−
εηε−η−εη= dd)y,x(f),(h)y,x(u
Ponendo allora ( ) yjkxjkykxkj YXYX eee)y,x(f ⋅== + , abbiamo quanto segue:
( ) ( )
∫ ∫
∫ ∫∫ ∫∞+
∞−
∞+
∞−
ε−η−
+∞
∞−
+∞
∞−
ε−η−+∞
∞−
+∞
∞−
ε−η−
εηεη⋅⋅=
=εη⋅εη=εη⋅εη=
ddee),(hee
ddeeee),(hddee),(h)y,x(u
YXYX
YYXXYX
jkjkyjkxjk
jkyjkjkxjkyjkxjk
Come si vede, abbiamo trovato in uscita ancora una sinusoide bidimensionale, avente gli stessinumeri d’onda dell’ingresso, la quale viene moltiplicata per una costante di scala corrispondente aquell’integrale doppio. Si nota che tale integrale doppio ha grande somiglianza con la trasformata diFourier monodimensionale: infatti, si tratta proprio della cosiddetta trasformata di Fourierbidimensionale, in questo caso applicata alla funzione di risposta all’impulso del sistema ecalcolata in corrispondenza dei numeri d’onda kX,kY: possiamo perciò concludere che
)k,k(Hee)y,x(u ee)y,x(f YXyjkxjk)y,x(hyjkxjk YXYX ⋅⋅= →⋅=
Il fattore di scala )k,k(H YX sarà, in generale, complesso, per cui varierà ampiezza ma anche fasedella sinusoide bidimensionale in ingresso, lasciando invece invariati i numeri d’onda (in quanto nondipende in alcun modo da x e/o da y).
In conclusione, le sinusoidi 2D fanno al caso nostro: essendo delle autofunzioni per i sistemilineari spazio-invarianti, potremo usarle per scomporre i segnali, in modo che l’uscita del sistema siainterpretabile come somma di sinusoidi (al limite infinite) ciascuna dipendente solo dallacorrispondente sinusoide in ingresso e dalle caratteristiche del sistema. Queste ultime, come si èvisto, sono rappresentate, nel dominio dei numeri d’onda kX e kY, dalla funzione )k,k(H YX .
Da notare che, se mandiamo in ingresso al sistema una singola sinusoide 2D, i valori di kX e kY
sono fissi (sono dei numeri), per cui anche )k,k(H YX è un numero (in generale complesso). Diverso

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli13
è il caso in cui ci riferiamo a )k,k(H YX come alla funzione di trasferimento del sistema: in questocaso, kX e kY sono delle variabili (così come la frequenza f per la funzione di trasferimento H(f) nelcaso monodimensionale), cui vanno sostituiti poi dei numeri per calcolare la risposta del sistema adogni singola componente in ingresso.
“FORMA” DELLE SINUSOIDI IN 2DA questo punto è interessante capire la “forma” di queste sinusoidi bidimensionali. Per fare
questo, dobbiamo ricordarci che, nel caso monodimensionale, per passare dalla generica sinusoidecomplessa alla corrispondente funzione di senso fisico, dobbiamo applicare l’operatore parte reale:
[ ] )xkcos(eRee XxjkRexjk XX =→
Procedimento del tutto analogo dobbiamo seguire nel caso bidimensionale:
( ) [ ] ( )ykxkcoseeRee YXyjkxjkykxkj YXYX +=⋅→+
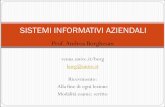
E’ dunque da notare che non abbiamo il prodotto di due coseni, in quanto l’operatore Re,applicato ad un prodotto, non dà il prodotto delle parti reali. La funzione ( )ykxkcos YX + hal’andamento di una tettoia (la cosiddetta tettoia sinusoidale). Ad esempio, la funzione
( )y802x502cos ⋅⋅π⋅+⋅⋅π⋅
ha l’andamento rappresentato nella figura seguente (ottenuto con Matlab):
Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli14
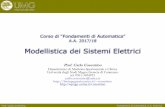
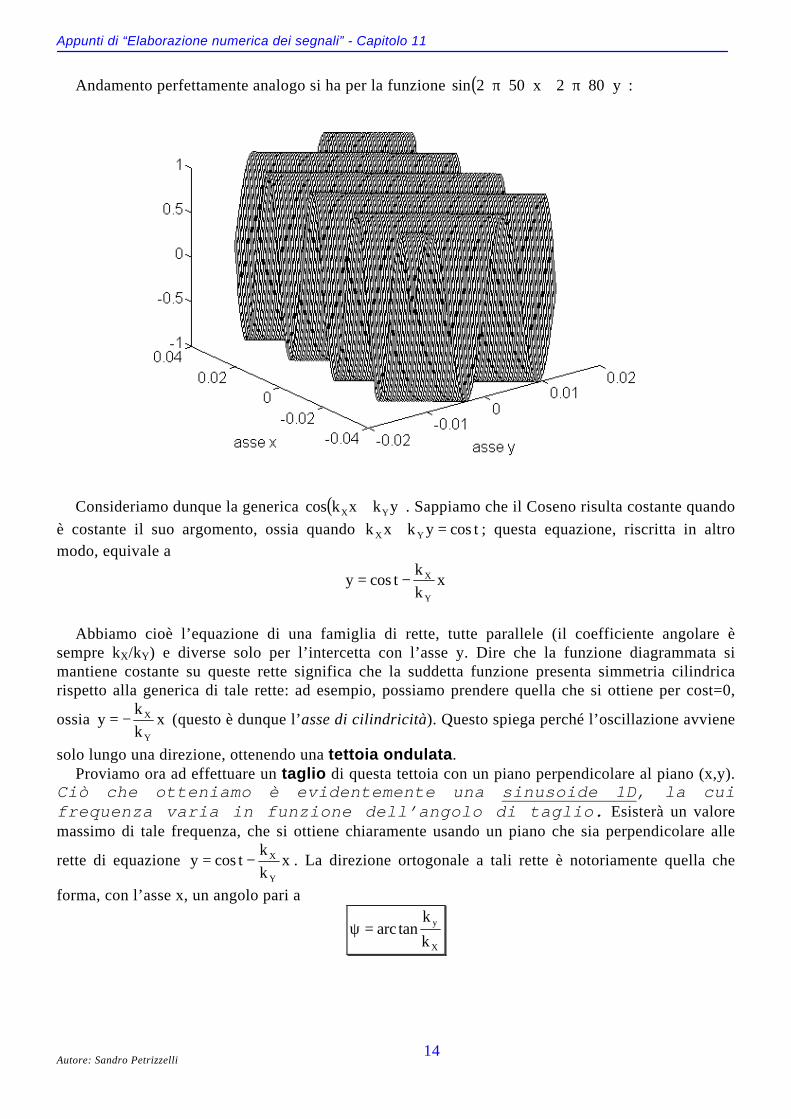
Andamento perfettamente analogo si ha per la funzione ( )y802x502sin ⋅⋅π⋅+⋅⋅π⋅ :
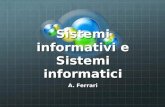
Consideriamo dunque la generica ( )ykxkcos YX + . Sappiamo che il Coseno risulta costante quando
è costante il suo argomento, ossia quando tcosykxk YX =+ ; questa equazione, riscritta in altromodo, equivale a
xk
ktcosy
Y
X−=
Abbiamo cioè l’equazione di una famiglia di rette, tutte parallele (il coefficiente angolare èsempre kX/kY) e diverse solo per l’intercetta con l’asse y. Dire che la funzione diagrammata simantiene costante su queste rette significa che la suddetta funzione presenta simmetria cilindricarispetto alla generica di tale rette: ad esempio, possiamo prendere quella che si ottiene per cost=0,
ossia xk
ky
Y
X−= (questo è dunque l’asse di cilindricità). Questo spiega perché l’oscillazione avviene
solo lungo una direzione, ottenendo una tettoia ondulata.Proviamo ora ad effettuare un taglio di questa tettoia con un piano perpendicolare al piano (x,y).
Ciò che otteniamo è evidentemente una sinusoide 1D, la cuifrequenza varia in funzione dell’angolo di taglio. Esisterà un valoremassimo di tale frequenza, che si ottiene chiaramente usando un piano che sia perpendicolare alle
rette di equazione xk
ktcosy
Y
X−= . La direzione ortogonale a tali rette è notoriamente quella che
forma, con l’asse x, un angolo pari a
X
y
k
ktanarc=ψ
Sistemi 2D (parte I)
Autore: Sandro Petrizzelli15
La frequenza della corrispondente sinusoide è
2Y
2X kk +=Ω
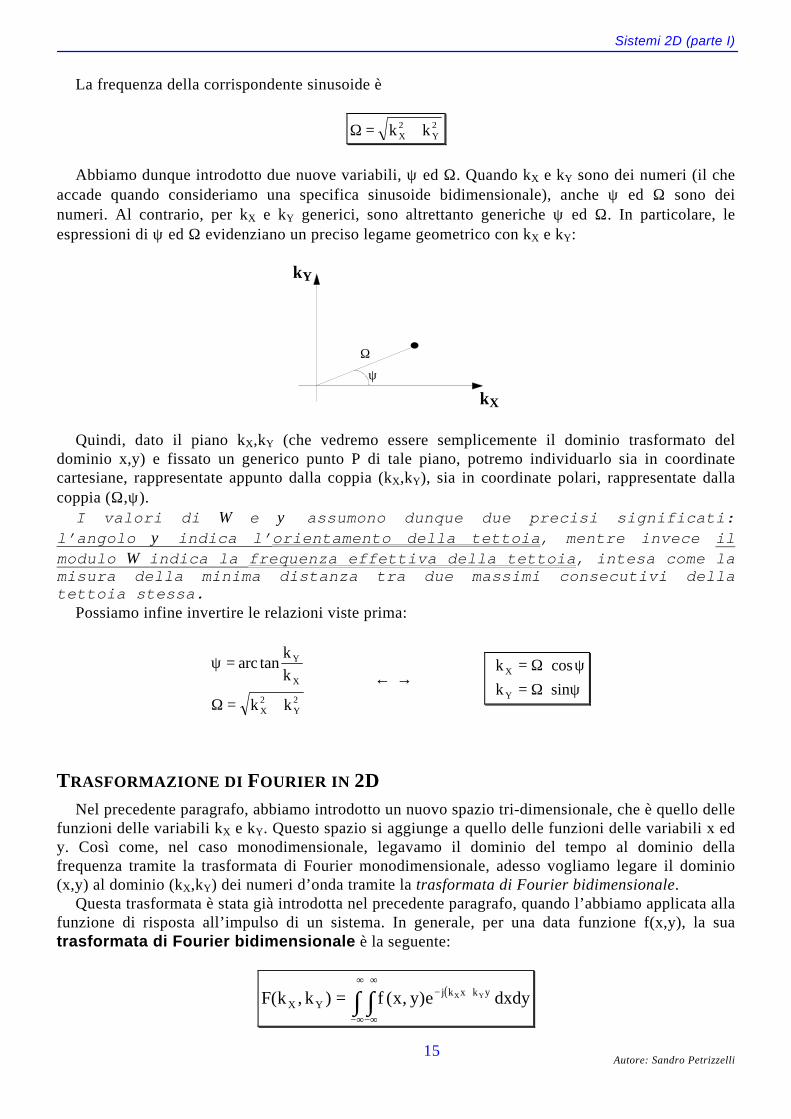
Abbiamo dunque introdotto due nuove variabili, ψ ed Ω. Quando kX e kY sono dei numeri (il cheaccade quando consideriamo una specifica sinusoide bidimensionale), anche ψ ed Ω sono deinumeri. Al contrario, per kX e kY generici, sono altrettanto generiche ψ ed Ω. In particolare, leespressioni di ψ ed Ω evidenziano un preciso legame geometrico con kX e kY:
kX
kY
ψ
Ω
Quindi, dato il piano kX,kY (che vedremo essere semplicemente il dominio trasformato deldominio x,y) e fissato un generico punto P di tale piano, potremo individuarlo sia in coordinatecartesiane, rappresentate appunto dalla coppia (kX,kY), sia in coordinate polari, rappresentate dallacoppia (Ω,ψ).I valori di Ω e ψ assumono dunque due precisi significati:
l’angolo ψ indica l’orientamento della tettoia, mentre invece ilmodulo Ω indica la frequenza effettiva della tettoia, intesa come lamisura della minima distanza tra due massimi consecutivi dellatettoia stessa.
Possiamo infine invertire le relazioni viste prima:
kk
k
ktanarc
2Y
2X
X
Y
→←
+=Ω
=ψ
ψ⋅Ω=ψ⋅Ω=
sink
cosk
Y
X
TRASFORMAZIONE DI FOURIER IN 2DNel precedente paragrafo, abbiamo introdotto un nuovo spazio tri-dimensionale, che è quello delle
funzioni delle variabili kX e kY. Questo spazio si aggiunge a quello delle funzioni delle variabili x edy. Così come, nel caso monodimensionale, legavamo il dominio del tempo al dominio dellafrequenza tramite la trasformata di Fourier monodimensionale, adesso vogliamo legare il dominio(x,y) al dominio (kX,kY) dei numeri d’onda tramite la trasformata di Fourier bidimensionale.
Questa trasformata è stata già introdotta nel precedente paragrafo, quando l’abbiamo applicata allafunzione di risposta all’impulso di un sistema. In generale, per una data funzione f(x,y), la suatrasformata di Fourier bidimensionale è la seguente:
( )∫ ∫+∞
∞−
+∞
∞−
+−= dxdye)y,x(f)k,k(F ykxkjYX
YX
Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli16
Si tratta, sostanzialmente, si moltiplicare la funzione f(x,y) per una sinusoide complessabidimensionale e integrare su tutto il piano x,y. Il piano di integrazione risulta eventualmenteristretto nel momento in cui f(x,y) è definita non per tutti i valori di x ed y ma per sottointervalli.
Il fatto di effettuare una moltiplicazione per una sinusoide complessa garantisce la separabilitàdel nocciolo della trasformata di Fourier in 2D: possiamo infatti scrivere che
∫ ∫∫ ∫+∞
∞−
−+∞
∞−
−+∞
∞−
+∞
∞−
−−
== dyedxe)y,x(fdxdyee)y,x(f)k,k(F yjkxjkyjkxjk
YXYXYX
L’integrale tra parentesi è, banalmente, la classica trasformata di Fourier monodimensionale,applicata ad una funzione di x e con parametro y. Indicando allora tale trasformata con F(kX,y),abbiamo che
∫+∞
∞−
−= dye)y,k(f)k,k(F yjkXYX
Y
Analogamente, l’integrale che ci è rimasto è la trasformata di Fourier monodimensionale applicataad una funzione di y e con parametro kX.
Abbiamo cioè trovato una importante e comoda conseguenza della separabilità del nocciolo dellatrasformata di Fourier in 2D: possiamo calcolare tale trasformata tramite duestadi in cascata, in ciascuno dei quali si calcola la classicatrasformata di Fourier monodimensionale:
)k,k(F)y,k(F)y,x(f YX1DFourier
X1DFourier → →
Questo è molto utile in quanto ci permette, come vedremo, di usare le tecniche della trasformatamonodimensionale e, in particolare, della DFT: potremo infatti applicarle prima alle righe dellamatrice bidimensionale che rappresenta i campioni della funzione e poi alle colonne di quantoottenuto dal primo passaggio.
Osservazione: trasformata di Fourier 2D in coordinate polari
E’ importante notare che la separabilità del nocciolo della trasformata diFourier in 2D non vale sempre, ma solo quando usiamo coordinatecartesiane sia nel dominio di partenza (x,y) sia in quello di arrivo(kX,kY). Per capirci, vediamo cosa succede usando coordinate polari.
Partiamo dalla definizione di trasformata vista prima:
( )∫ ∫+∞
∞−
+∞
∞−
+−= dxdye)y,x(f)k,k(F ykxkjYX
YX
Possiamo passare, nel dominio (x,y), dalle coordinate cartesiane a quelle polari (ρ,θ): basta infattiporre x=ρρcosθθ e y=ρρsinθθ e tener conto anche che dxdy=ρρdρρdθθ. Sostituendo nella trasformata,aggiustando opportunamente gli estremi di integrazione5, otteniamo
5 In pratica, bisogna inserire lo Jacobiano della trasformazione da coordinate cartesiane a coordinate polari

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli17
( )∫ ∫π+∞
θρ+θρ− θρρθρ=2
0 0
sinkcoskjYX dde),(f)k,k(F YX
Analogo passaggio possiamo anche fare nel dominio trasformato, nel quale dobbiamo cioè porrekX=ΩΩcosψψ e kY=ΩΩsinψψ: otteniamo
( ) ( )
( )∫ ∫
∫ ∫∫ ∫π ∞+
ψ−θρΩ−
π+∞θψ+θψρΩ−
π+∞θρ⋅ψΩ+θρ⋅ψΩ−
θρρθρ=
=θρρθρ=θρρθρ=ψΩ
2
0 0
cosj
2
0 0
sinsincoscosj2
0 0
sinsincoscosj
dde),(f
dde),(fdde),(f),(F
Abbiamo dunque trovato che la trasformata di Fourier bidimensionale in coordinatepolari è
( )∫ ∫π+∞
ψ−θρΩ− θρρθρ=ψΩ2
0 0
cosj dde),(f),(F
La presenza di una funzione Coseno in quell’esponente non consente alcuna separabilità delnocciolo. Questo rende necessario il calcolo dell’integrale doppio, il che rappresenta una evidentecomplicazione matematica rispetto al caso delle coordinate cartesiane.
Quindi, la rappresentazione della trasformata di Fourier 2D incoordinate polari ha lo svantaggio di non avere il noccioloseparabile. In compenso, come vedremo nei prossimi paragrafi, essa è molto vantaggiosa permostrare delle proprietà che in coordinate cartesiane sarebbero invece molto più difficili daesprimere.
Formula di antitrasformazione in coordinate cartesiane e polari
Così come, data una funzione 2D f(x,y), è possibile calcolarne la trasformata di Fourier 2DF(kX,kY), è possibile fare anche il passaggio inverso, che avviene tramite la formula seguente (incoordinate cartesiane):
( )∫ ∫+∞
∞−
+∞
∞−
+
π= YX
ykxkjYX2
dkdke)k,k(F4
1)y,x(f YX
Esiste anche la formula di antitrasformazione in coordinate polari, che si ricava ancora una voltapartendo dalla formula di antitrasformazione espressa in coordinate cartesiane: si verifica facilmenteche tale formula di antitrasformazione è
( )∫ ∫π
π−
+∞ψ−θρΩ ψΩΩψΩ
π=θρ
0
cosj2
dde),(F4
1),(f
Concludiamo il paragrafo ricordando che, così come avviene nel caso monodimensionale, anchein 2D la trasformata di Fourier esiste solo se la funzione di partenza f(x,y) è ad energia finita.

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli18
PROPRIETÀ DELLA TRASFORMATA DI FOURIER
Senza portare alcuna dimostrazione, elenchiamo qui di seguito alcune importanti proprietà dellatrasformata di Fourier bidimensionale (in coordinate cartesiane), che ricalcano molto da vicinoquelle viste per la trasformata di Fourier monodimensionale:
• derivazione semplice nel dominio (x,y):
→←∂
∂
→←∂
∂
)k,k(Fjky
)y,x(f
)k,k(Fjkx
)y,x(f
YXY
YXX
• derivazione doppia nel dominio (x,y): )k,k(Fkkyx
)y,x(fYXYX
2
−→←∂∂
∂
• derivazione semplice nel dominio (kX,kY):
∂∂
→←−
∂∂
→←−
Y
YX
X
YX
k
)k,k(F)y,x(jyf
k
)k,k(F)y,x(jxf
• traslazione nel dominio (x,y):
→←−−
→←−
→←−
−−
−
−
)k,k(Fee)yy,xx(f
)k,k(Fe)yy,x(f
)k,k(Fe)y,xx(f
YXyjkxjk
00
YXyjk
0
YXxjk
0
0Y0X
0Y
0X
• proprietà di scala: ( )
βααβ
→←βα YX k,
kF
1y,xf
• ribaltamento nel dominio (x,y):
−−→←−−
−→←−
−→←−
)k,k(F)y,x(f
)k,k(F)y,x(f
)k,k(F)y,x(f
YX
YX
YX
• simmetria per f(x,y) reale: )k,k(F)k,k(F YX*
YX −−=
Proprietà di rotazione nel dominio (x,y)
Una proprietà di particolare interesse nelle applicazioni è la seguente. Consideriamo una genericafunzione f(x,y) nel dominio (x,y). Con le posizioni x=ρρcosθθ e y=ρρsinθθ, la esprimiamo incoordinate polari: otteniamo f(ρρ,θθ). Applichiamo adesso una rotazione della fase θ di questafunzione:
( ) ( )0 di fase di rotazione ,f,f 0 θ−θρ →θρ θ

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli19
Ci chiediamo quanto valga la trasformata di questa nuova funzione f(ρ,θ-θ0). Si può dimostrareche, se F(Ω,ψ) era la trasformata, sempre in coordinate polari, di f(ρ,θ), allora la trasformata dif(ρ,θ-θ0) si ottiene da F(Ω,ψ) applicando la stessa rotazione di fase applicata nel dominio dipartenza:
( )( ) ),(F,f
),(F,f
00 θ−ψΩ→←θ−θρ
ψΩ→←θρ
Questa proprietà si può dunque sintetizzare dicendo che una rotazione in un dominioequivale ad una identica rotazione nell’altro dominio. La dimostrazione diquesta proprietà è molto semplice e si ottiene con un cambio di variabile nella formula ditrasformazione (espressa in coordinate polari).
Trasformata di una funzione separabile
Un’altra proprietà importante è quella che riguarda la trasformata di una funzione f(x,y) che siaseparabile. Supponiamo, infatti, di poter scrivere che
)y(h)x(g)y,x(f ⋅=
Calcoliamo la trasformata di tale funzione, sfruttando evidentemente la separabilità, sia dellafunzione sia del nocciolo della trasformata:
( )
∫ ∫
∫ ∫∫ ∫∞+
∞−
−∞+
∞−
−
+∞
∞−
+∞
∞−
−−+∞
∞−
+∞
∞−
+−
=
===
dyedxe)x(g)y(h
dxdyee)y(h)x(gdxdye)y,x(f)k,k(F
yjkxjk
yjkxjkykxkjYX
YX
YXYX
L’integrale tra parentesi non è altro che la trasformata monodimensionale di Fourier di g(x):indicandola con G(kX), è evidente che possiamo anche portarla fuori dell’integrale esterno, il quale siriduce a sua volta alla trasformata monodimensionale di h(y): quindi
)k(H)k(Gdye)y(h)k(Gdye)k(G)y(h)k,k(F YXyjk
Xyjk
XYXYY === ∫∫
+∞
∞−
−+∞
∞−
−
Abbiamo dunque trovato che la trasformata di Fourier 2D di una funzioneseparabile è pari al prodotto delle trasformate 1D delle singolefunzioni:
)k(H)k(G)k,k(F)y(h)x(g)y,x(f YXYX =→←⋅=
La trasformata è evidentemente a sua volta una funzione separabile.Notiamo che è del tutto indifferente calcolare prima la trasformata di g(x) o quella di h(y).
Bisogna di caso in caso fare la scelta più efficiente dal punto di vista della semplicità dei conti.

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli20
Trasformata di funzioni a simmetria circolare
Abbiamo visto in precedenza che una funzione f(x,y) si dice a simmetria cilindrica se dipendeda una sola coordinata, sia essa x, y o una qualsiasi direzione nel piano (x,y). Consideriamo inveceadesso una funzione f(x,y) a simmetria circolare, il cui dominio è quindi un cerchio centratonell’origine del piano (x,y):
x
y
Una funzione di questo tipo ha valori dipendenti solo dalla coordinata polare ρ, per cui può essereespressa nella forma f(x,y)=f(ρρ). Bisogna però stare attenti alla notazione f(ρ): essa, infatti, nonindica una funzione monodimensionale, in quanto è funzione di x ed y tramite la nota relazione
22 yx +=ρ .
Vogliamo allora calcolare la trasformata di Fourier 2D di questa funzione. E’ intuitivo il risultatoche dobbiamo aspettarci: infatti, una diretta conseguenza della proprietà di rotazione vista prima cidice che anche la trasformata dovrà essere a simmetria circolare, in quanto solo in questo caso unarotazione in un dominio provocherà una uguale rotazione nell’altro dominio. Verifichiamolo.
Essendo f(x,y=f(ρ), conviene usare la formula di trasformazione 2D in coordinate polari:
( ) ( ) ( )∫ ∫∫ ∫∫ ∫∞ π
ψ−θρΩ−π∞
ψ−θρΩ−π∞
ψ−θρΩ− ρρ
θρπ=θρρρ=θρρθρ=ψΩ
0
2
0
cosj2
0 0
cosj2
0 0
cosj dde)(f2dde)(fdde),(f),(F
L’ultimo passaggio è stato ottenuto semplicemente scambiando l’ordine di integrazione. Talepassaggio ha evidenziato la presenza di una particolare funzione, quella tra parentesi quadre, notacome funzione di Bessel di ordine zero: questa funzione risulta indipendente dalla coordinataψ e, in particolare, risulta essere pari a 2ππJ0(ΩΩρρ).
Sostituendo, quindi, concludiamo che
∫∞
ρρρΩρπ=Ω0
0 d)(J)(f2)(F
Come ci aspettavamo, abbiamo quindi ottenuto che la trasformata di Fourier 2D diuna funzione a simmetria circolare è a sua volta una funzione asimmetria circolare.
Il problema di quest’ultima formula è essenzialmente di natura computazionale: infatti, il calcolodi quell’integrale è tutt’altro che semplice. Nel prossimo paragrafo vedremo come aggirare questoostacolo.
Sistemi 2D (parte I)
Autore: Sandro Petrizzelli21
Segnaliamo inoltre che, se f(ρ) fosse realmente una funzione monodimensionale (quindi della solavariabile indipendente ρ), allora )(F Ω data da quella espressione corrisponde alla cosiddetta
trasformata di Hankel monodimensionale di f(ρ).Esiste anche la trasformazione di Hankel inversa, che si ricava ovviamente
dall’antitrasformata di Fourier 2D in coordinate polari, applicata nel caso particolare di una funzioneF(Ω) che dipende solo da Ω: si trova facilmente che
∫ ∫π
π−
+∞
ΩΩρΩΩπ
=ρ0
0 d)(J)(F2
1)(f
La dualità con la formula di trasformazione è evidente.
Trasformata della proiezione di una funzione
Abbiamo già introdotto in precedenza il concetto di proiezione di una funzione bidimensionale:ad esempio, data la generica funzione f(x,y), le sue proiezioni sull’asse x e sull’asse y sonorispettivamente
∫
∫∞+
∞−
+∞
∞−
=
=
dx)y,x(f)y(f
dy)y,x(f)x(f
Y,P
X,P
In pratica, la proiezione di una funzione su una determinata direzione è così interpretabile:considerata, per esempio, la proiezione sull’asse x, bisogna prendere x come parametro, intersecaref(x,y) con un piano passante per x e ortogonale al piano (x,y) e calcolare l’area sottesadall’intersezione (che è una curva). Al variare di x, quest’area diventa una funzione di x stesso.Discorso assolutamente analogo per la proiezione sull’asse y o su una qualsiasi altra direzione.
Vediamo allora se esiste un legame tra la trasformata di Fourier di una funzione bidimensionalef(x,y) e la trasformata di Fourier monodimensionale di una proiezione di f(x,y).
A tal fine, consideriamo l’espressione generale della trasformata di Fourier in 2D in coordinatecartesiane:
( )∫ ∫+∞
∞−
+∞
∞−
+−= dxdye)y,x(f)k,k(F ykxkjYX
YX
Separando il nocciolo, possiamo scrivere che
∫ ∫+∞
∞−
−+∞
∞−
−
= dyedxe)y,x(f)k,k(F yjkxjk
YXYX
Adesso calcoliamo questa trasformata sull’asse kY, il che significa porre kX=0: l’esponenzialefunzione di x diventa unitario, per cui abbiamo
∫ ∫+∞
∞−
−+∞
∞−
= dyedx)y,x(f)k,0(F yjk
YY

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli22
Tra le parentesi quadre abbiamo ottenuto la proiezione di f(x,y) sull’asse y:
∫+∞
∞−
−= dye)y(f)k,0(F yjkY,PY
Y
Ciò che è rimasto è evidentemente la trasformata di Fourier monodimensionale della proiezione dif(x,y) sull’asse y.
E’ immediato verificare che l’analogo risultato vale per l’altra coordinata:
∫+∞
∞−
−= dxe)x(f)0,k(F xjkX,PX
X
Queste due trasformate hanno un significato molto particolare: F(0,kY) è la funzione che si ottieneintersecando F(kX,kY) con un piano ortogonale al piano (kX,kY) e giacente sull’asse kY;analogamente, F(kX,0) è la funzione che si ottiene intersecando F(kX,kY) con un piano ortogonale alpiano (kX,kY) e giacente sull’asse kX. Si tratta perciò di tagliare la trasformata in modo opportuno.
E’ bene osservare che un taglio è diverso da una proiezione.Possiamo dunque concludere dicendo sostanzialmente che una proiezione nel dominio
(x,y) equivale ad un taglio nel dominio trasformato ed il legame èrappresentato dalla trasformata di Fourier monodimensionale:
)k,0(F)y(f)y,x(f
)0,k(F)x(f)y,x(f
Y1D Fourier
Y,Pysu proiezione
X1D Fourier
X,Psu x proiezione
→← →
→← →
Questa proprietà vale sia per proiezioni sull’asse x o sull’asse y sia per proiezioni su direzioniqualsiasi, in base alla proprietà di rotazione precedentemente enunciata: infatti, se abbiamo unafunzione f(x,y) e la proiettiamo su una direzione che non sia l’asse y o l’asse x ma formi conquest’ultima un angolo θ, potremo calcolare la trasformata della proiezione di f(x,y) sull’asse x,tramite la formula vista prima, e poi applicare una rotazione di fase ancora di θ per ottenere latrasformata della proiezione effettivamente considerata.
Quanto appena detto si ricongiunge ai discorsi del precedente paragrafo, in cui abbiamo verificatoche, data una funzione f(x,y)=f(ρ) a simmetria circolare, la sua trasformata è anch’essa a simmetriacircolare e vale
∫∞
ρρρΩρπ=Ω0
0 d)(J)(f2)(F
Abbiamo però osservato che risulta complicato calcolare F(Ω) tramite la risoluzione diquell’integrale. Adesso siamo invece in grado di aggirare questa difficoltà: data la funzione f(ρ), cene calcoliamo la proiezione su un’asse di nostro comodo e poi ci calcoliamo la sua trasformata nelmodo visto poco fa, ossia calcolando la semplice trasformata di Fourier monodimensionale;dopodiché, applichiamo una opportuna rotazione e otteniamo la F(Ω) desiderata.

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli23
ESEMPI DI TRASFORMATE BIDIMENSIONALI
Come primo esempio di calcolo concreto di una trasformata di Fourier bidimensionale,consideriamo la trasformata dell’impulso bidimensionale δδ(x,y)=δδ(x)δδ(y). Applicandorigorosamente la definizione di trasformata e sfruttando la separabilità sia del nocciolo dellatrasformata sia della funzione impulsiva, abbiamo quanto segue:
( )
[ ] 1dye1)y(dyee)y(dyedxe)x()y(
dxdyee)y()x(dxdye)y,x()k,k(F
yjkyjk0x
xjkyjkxjk
yjkxjkykxkjYX
YYXYX
YXYX
=⋅⋅δ=⋅⋅δ=
δδ=
=δδ=δ=
∫∫∫ ∫
∫ ∫∫ ∫∞+
∞−
−∞+
∞−
−=
−∞+
∞−
−∞+
∞−
−
+∞
∞−
+∞
∞−
−−+∞
∞−
+∞
∞−
+−
Quanto ottenuto è assolutamente analogo al risultato nel caso monodimensionale: abbiamo infattitrovato che un impulso bidimensionale è la somma di tutte le sinusoidi 2D a tutte le frequenze, confase nulla ed ampiezza costante (pari ad 1): la funzione 1)k,k(F YX = è infatti un piano parallelo al
piano (x,y) e a distanza unitaria da esso, così come, nel caso 1D, la trasformata di δ(t) era una lineaorizzontale di altezza 1:
f(x,y)
x
y
)y,x(δ
F(kX,kY)
kX
kY
E’ ovvio che l’impulso potrebbe essere posizionato nel generico punto (x0,y0) anzichénell’origine: la sua trasformata vale in questo caso
( )
[ ]
[ ] 0Y0X
0
Y0X
Y0XY
0
XYX
YXYX
yjkxjkyy
yjkxjk
yjk0
xjkyjkxx
xjk0
yjkxjk00
yjkxjk00
ykxkj00YX
eeee
dye)yy(edyee)yy(dyedxe)xx()yy(
dxdyee)yy()xx(dxdye)yy,xx()k,k(F
−−=
−−
∞+
∞−
−−∞+
∞−
−=
−∞+
∞−
−∞+
∞−
−
+∞
∞−
+∞
∞−
−−+∞
∞−
+∞
∞−
+−
==
=−δ=⋅⋅−δ=
−δ−δ=
=−δ−δ=−−δ=
∫∫∫ ∫
∫ ∫∫ ∫
E’ ovvio che questo stessi risultato si poteva ottenere banalmente applicando alla trasformatadell’impulso δ(x)δ(y) la proprietà di traslazione nel dominio (x,y).
Adesso calcoliamo la trasformata di una discontinuità a muraglia. Ad esempio, consideriamo lamuraglia δ(x) disposta sull’asse y:

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli24
f(x,y)
x
y
)x(δ
Per il calcolo di questa trasformata, possiamo sfruttare ancora una volta la separabilità, in quantopossiamo scrivere che )x(1)x( δ⋅=δ : abbiamo allora che
( )
)k(dyedyedxe)x(
dxdyee1)x(dxdye)x()k,k(F
Yyjkyjkxjk
yjkxjkykxkjYX
YYX
YXYX
δ==
δ=
=⋅⋅δ=δ=
∫∫ ∫
∫ ∫∫ ∫∞+
∞−
−∞+
∞−
−∞+
∞−
−
+∞
∞−
+∞
∞−
−−+∞
∞−
+∞
∞−
+−
Questo risultato è stato dunque ottenuto nel modo seguente: in primo luogo, abbiamo effettuato latrasformazione monodimensionale lungo l’asse x (x→kX), per ogni possibile valore di y; la funzioneda trasformare era un impulso δ(x), la cui trasformata è quindi una muraglia di altezza unitaria lungol’asse kX; successivamente, abbiamo trasformato secondo y (y→kY), per tutti i possibili valori di kX,ottenendo ancora una muraglia, ma lungo l’asse kX.
Quindi, graficamente, abbiamo ottenuto quanto segue:
f(x,y)
x
y
)x(δ F(kX,kY)
kY
kX
)k( Yδ
Quindi, la trasformata della muraglia δ(x) sull’asse y è una muragliaδ(kY) sull’asse kX e, viceversa, la trasformata della muraglia δ(y)sull’asse x è una muraglia δ(kX) sull’asse kY.
Questo risultato è chiaramente valido comunque sia orientata la muraglia: infatti, in virtù delleproprietà precedente viste, se abbiamo una muraglia su una generica direzioneche forma un angolo θ con l’asse x, la sua trasformata sarà unamuraglia che forma un angolo θ con l’asse kY.
Possiamo dire, quindi, che una muraglia su una direzione generica r si trasforma, nel dominiotrasformato, in una muraglia sulla direzione ortogonale a quella corrispondente ad r: ad esempio,come si è visto, da δ(x) passiamo a δ(kY) e da δ(y) passiamo a δ(kX).

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli25
Questo discorso si può generalizzare ad altre funzioni. Ad esempio, con riferimento alla prossimafigura, se consideriamo una funzione f(x,y) allungata sull’asse x, lasua trasformata F(kX,kY) sarà una funzione allungata sull’asse kY (eviceversa):
Questo risultato ce lo possiamo spiegare in modo molto intuitivo: se consideriamo il casomonodimensionale, sappiamo che una funzione di durata limitata in banda ha uno spettroteoricamente di banda infinita; nel caso 2D, allora, essendo la funzione allungata sull’asse x, avràestensione minore sull’asse kX, mentre invece, essendo stretta sull’asse y, avrà estensione maggioresull’asse kY.
Quindi, ad una struttura allungata in una direzione r in un dominio corrisponde una strutturaallungata nella direzione ortogonale a quella corrispondente ad r nell’altro dominio.
Consideriamo adesso un’altra funzione bidimensionale f(x,y) di particolare interesse; si tratta delparallelepipedo (di lato 2b lungo y e 2a lungo x), ossia dell’equivalente del rettangolo nel casomonodimensionale:
f(x,y)
x
y
2a
2b
Calcoliamo dunque la trasformata 2D di questa funzione, sfruttando la separabilità, trasformandoprima lungo x (x→kX) e poi lungo y (y→kY):
( )
[ ] [ ][ ] ( )
( ) [ ] ( ) ( ) ( ) ( )bk
bksinb2
ak
aksina2
k
bksin2
k
aksin2e
jk
)1(
k
akjsin2
dyek
aksin2dyeee
jk
1dyee
jk
1
dyedxedxdyeedxdye)y,x(f)k,k(F
Y
Y
X
X
Y
Y
X
Xb
byjk
YX
X
b
b
yjk
X
Xb
b
yjkajkajk
X
b
b
yjka
axjk
X
b
b
yjka
a
xjkb
b
a
a
yjkxjkykxkjYX
Y
YYXXYX
YXYXYX
⋅==−
=
==−−=
−=
=
===
+
−−
+
−
−+
−
−+−+
−
−+
−−
+
−
−+
−
−+
− −
−−+∞
∞−
+∞
∞−
+−
∫∫∫
∫ ∫∫ ∫∫ ∫
La trasformazione lungo x dà dunque origine alla funzione (sin(akX))/akX; questa, però, non è unafunzione monodimensionale, ma una funzione comunque bidimensionale, che in questo caso è

Appunti di “Elaborazione numerica dei segnali” - Capitolo 11
Autore: Sandro Petrizzelli26
definita per -b≤y≤+b. Il suo andamento è quindi quello rappresentato nella figura seguente, infunzione delle coordinate kX e y:
La successiva trasformazione avviene lungo y e dà origine ad un (sin(bkY))/bkY.Il prodotto delle due funzioni ottenute è la trasformata che cercavamo. Come è fatta?
L’andamento del singolo sinc è noto; il prodotto dei due sinc dà origine alla seguente funzione:
Funzione Seno Cardinale bidimensionale ottenuta ponendo kX=2π50 e kY=2π80
Se immaginiamo di osservare dall’alto questa particolare funzione, vediamo qualcosa del tiporappresentato nella figura seguente:

Sistemi 2D (parte I)
Autore: Sandro Petrizzelli27
kX
kY
Su ciascuna direzione (asse kX e kY), la funzione presenta dei massimi, che si trovano a distanzaπ/a lungo kX e a distanza π/b lungo l’asse kY, che sono via via decrescenti man mano che ci siallontana dall’origine. Si tratta cioè dei punti di massimo dei singoli sinc.
Una importante caratteristica del parallelepipedo è quella di essere separabile, come si è visto, sianel dominio (x,y) sia nel dominio (kX,kY). Quindi, un filtro che abbia il parallelepipedo comerisposta all’impulso è separabile e potremo perciò calcolare la sua uscita applicando separatamente ilfiltraggio in una direzione e poi quello nella direzione ortogonale.
Autore: SANDRO PETRIZZELLIe-mail: [email protected]
sito personale: http://users.iol.it/sandrysuccursale: http://digilander.iol.it/sandry1