
Algebra lineare, gruppi di matrici e geometria di erenziale · 2010-10-28 · Algebra lineare,...
225
Algebra lineare, gruppi di matrici e geometria differenziale Normalisti del secondo anno vari ed eventuali 28 ottobre 2010
Transcript of Algebra lineare, gruppi di matrici e geometria di erenziale · 2010-10-28 · Algebra lineare,...

Algebra lineare, gruppi di matrici e geometriadifferenziale
Normalisti del secondo anno vari ed eventuali
28 ottobre 2010

2

Introduzione
Questi sono gli appunti del corso tenuto dal prof. Angelo Vistoli (insieme al dott. Filip-po Callegaro) ai matematici e fisici normalisti del secondo anno, durante l’anno accade-mico 2009-2010. Non offriamo alcuna garanzia in merito alla loro qualita o attendibilita,anche perche ancora li stiamo ancora scrivendo.
Questa introduzione, in particolare, e manifestamente brutta ed insignificante. Sarariscritta non appena avremo tempo e voglia di farlo. Non trattenete il fiato.
Programma del corso
Potenze esterne di uno spazio vettoriale. Applicazioni ai concetti fondamentali dell’algebralineare: dimensione, rango, determinanti, minori.
• Numeri reali, complessi e quaternioni.
• Forme quadratiche ed hermitiane.
• Gruppi di matrici. Gruppi generale lineare. Gruppi speciale lineare. Gruppi orto-gonali reali. Gruppi unitari. Gruppi simplettici. Quaternioni e rotazioni in 3 e 4dimensioni.
• Qualche concetto elementare di geometria differenziale.
3

4
Capitolo 1
Prima lezione (Angelo Vistoli,06/10/2009)
1.1 Gruppi: definizione, proprieta fondamentali ed
esempi
Definizione 1.1. Un gruppo e una coppia (G, ·) dove G e un insieme e · e una funzioneG×G→ G e che manda (a, b) 7→ ab tale che possieda le seguenti proprieta:
1. L’operazione · e associativa, cioe ∀a, b, c ∈ G (ab)c = a(bc)
2. Esiste l’elemento neutro e ∈ G, cioe ∀g ∈ G eg = ge = g;
3. Ogni elemento di G ha un inverso, cioe ∀g ∈ G ∃g−1 tale che gg−1 = g−1g = e Qui si potrebbe definirein modo un po’ diversoe dimostrare le proprietadi equivalenza fra inversi eneutri destri e sinistri
Teorema 1.2. L’elemento neutro di un gruppo e unico. Sia (G, ·) un gruppo e sianoe, e′ ∈ G due elementi tali per cui vale la proprieta dell’elemento neutro: ∀g ∈ G eg =ge = g = e′g = ge′. Allora si ha che e = e′.
Dimostrazione. Applico la proprieta di elemento neutro a e e e′.
e = e′e = e′
Teorema 1.3. Ogni elemento ha un solo inverso. Sia (G, ·) un gruppo e g ∈ G un suoelemento. Se due elementi h, h′ ∈ G sono inversi di g, cioe hg = gh = e = gh′ = h′gallora h = h′
Dimostrazione. Considero l’uguaglianza gh = gh′ e la moltiplico a destra per h:
gh = gh′
hgh = hgh′
eh = eh′
h = h′
Da qui in poi quando si parla di un campo K si intendera R o C.
Esempio 1.4. Ecco alcuni esempi di gruppi
5

1. (Mn(K),+) le matrici n×n con elementi in K sono un gruppo rispetto alla sommacomponente per componente.
2. (Mn(K), ·) le matrici n×n con elementi in K non sono un gruppo rispetto al prodottodi matrici perche alcune matrici non sono invertibili.
3. Si definisce GLn(K) = A ∈ Mn(K) | A e invertibile. (GLn(K), ·) e un grupporispetto al prodotto di matrici.
Definizione 1.5. Un sottogruppo di un gruppo (G, ·) e un gruppo (H, ·′) tale che H ⊂ G eche abbiano la stessa operazione, cioe l’operazione · ristretta ad H sia uguale a ·′. Intantosi indica H < G
Osservazione 1.6. La definizione di sottogruppo data sopra e equivalente al chiedere cheH ⊂ G possieda le seguenti proprieta rispetto all’operazione sugli elementi come elementidi G:
• Possieda l’elemento neutro
• Chiusura per l’operazione ·
• Ogni elemento possieda l’inverso.
Esempio 1.7. Nel gruppo GLn(K) ci sono alcuni sottogruppi notevoli che occorre citaresubito:
• SLn(K) = A ∈ GLn(K) | det(A) = 1 detto gruppo lineare speciale.
• On(K) = A ∈ GLn(K) | A e ortogonale detto gruppo ortogonale
• SOn(K) = On ∩ SLn detto gruppo ortogonale speciale
• Un(K) =A ∈ GLn(K) | AAt = In
il gruppo delle matrici unitarie
Questi gruppi possiedono proprieta interessanti. Per esempio vale il seguente teoremanoto dal corso di algebra lineare:
Teorema 1.8. Sono equivalenti le seguenti condizioni su A ∈n Mn(R)
• AAt = In
• AtA = In
• Le colonne di A sono una base ortogonale di Rn
• |Ax| = |x| ∀x ∈ Rn
• < Ax,Ay >=< x, y > ∀x, y ∈ Rn
Un altro gruppo di matrici interessante e il seguente:
Definizione 1.9. Le trasformazioni affini di Kn sono l’insieme delle f(A,v) : Kn → Kn
tali che se A ∈ GLn(K), v ∈ Kn ⇒ f(A,v)(x) = Ax+ v
6

Osservazione 1.10. Le trasformazioni affini di Kn sono un gruppo rispetto alla compo-sizione. Infatti si ha:
f(A,v) f(B,w)(x) = A(Bx+ w) + v = ABx+ Aw + v = f(AB,Aw+v)
f(In,~0)(x) = x
f(A,v) f(A−1,A−1w)(x) = x
Definizione 1.11. Le matrici affini sono le matrici che rappresentano le trasformazioniaffini di Kn visto come spazio affine. In forma matriciale si tratta intanto di matrici dellaforma:
A ∈ GLn+1(K) A =
M v
0 1
Infatti, siano (x1, . . . , xn) le coordinate di x ∈ Rn. Sia allora
x =
x1
x2...xn1
f(x) = Ax = M
x1...xn
+ v
Un’altro sottogruppo interessante delle trasformazioni invertibili di Rn e il seguente:
Definizione 1.12. Le isometrie di Rn sono
En = f : Rn → Rn | |f(x)− f(y)| = |x− y| ∀x, y ∈ Rn
Osservazione 1.13. In genere si possono definire le isometrie E(V ) di uno spazio vetto-riale normato V qualsiasi. Pero in genere E(V ) non e un gruppo in quanto non sempreesiste l’inversa. Un controesempio possibile e quello delle successioni a quadrato integrabi-le lp dove l’isometria f : lp → lp, f((a1, a2, . . . , an, . . . )) = (b1, b2, . . . , bn, . . . ) con b2n = ane b2n+1 = 0 non e suriettiva quindi non invertibile.
Teorema 1.14. En coincide con le trasformazioni affini ortogonali di Rn. In altre parolef ∈ En ⇐⇒ f = Ax+ v con v ∈ Rn e A ∈ On(R)
Vedremo la dimostrazione per casi di n piccoli
Dimostrazione. n = 1
7

8

Capitolo 2
Seconda lezione (Filippo Callegaro,07/10/2009)
2.1 I numeri complessi
Il campo dei numeri complessi C e ottenuto a partire dal campo dei reali aggiungendol’unita immaginaria i, radice del polinomio x2 + 1. Si puo dimostrare che tale campo ealgebricamente chiuso e isomorfo a R2 come spazio vettoriale. Un numero complesso z siesprime in forma unica come: z = x+ iy dove x e y sono numeri reali. Si definisce modulodi un numero complesso il valore |z| =
√x2 + y2) e coniugato di un numero complesso il
valore z = x− iy. Vale l’identita zz = |z|2, da cui si puo dedurre z−1 = z|z|
2.1.1 Coordinate polari
I numeri complessi possono essere espressi anche mediante le coordinate polari. Postoeiθ = cos θ + i sin θ, un numero complesso e della forma
z = ρeiθ.
Questa forma rende piu agevole la moltiplicazione di numeri complessi:
ρeiθ · ρ′eiθ′ = ρρ′ei(θ+θ′).
Si puo inoltre dimostrare che:
ez =+∞∑i=0
zi
i!.
2.1.2 I complessi come sottoanello di matrici
Il campo C dei complessi puo essere costruito anche in un altro modo, ossia come sot-toanello dell’anello delle matrici quadrate 2× 2 M2(R) su R. Con questo intendiamo direche e possibile costruire una funzione iniettiva ϕ : C→M2(R), tale che, presi comunquez, w ∈ C, valgano le seguenti condizioni:
1. ϕ(z) + ϕ(w) = ϕ(z + w);
9

2. ϕ(z)ϕ(w) = ϕ(zw).
Queste condizioni, in sostanza, significano che C si comporta, rispetto alla somma edalla moltiplicazione, esattamente come Imϕ ⊂ M2(R) si comporta rispetto alla sommamatriciale ed alla moltiplicazione righe per colonne. Diremo che ϕ e un omomorfismodi anelli tra C e M2(R). Poiche, poi, se restringiamo il codominio all’immagine di ϕ, lafunzione risulta banalmente biiettiva, possiamo anche dire che ϕ e un isomorfismo tra Ce Imϕ. Vediamo ora, pero, di costruire effettivamente una tale funzione.
Poiche sia C cheM2(R) contengono al loro interno una copia di R, possiamo cominciaremandando R ⊂ C in R ⊂ M2(R), per esempio decidendo che, preso x ∈ R ⊂ C, ϕ(x)
e la matrice
(x 00 x
). E piuttosto chiaro che, per ora, la funzione che ne salta fuori e
iniettiva ed e un omomorfismo.Dobbiamo ora capire in che matrice mandare l’unita immaginaria i: poiche i2 = −1,
perche questa relazione sia rispettata anche nel “mondo delle matrici”, la trasformata di idovra essere una matrice che, elevata al quadrato, dia l’inverso dell’identita. Per esempio,
possiamo mandare i in
(0 −11 0
).
A questo punto l’intera funzione e fissata. Infatti, sia z ∈ C, z = a+ ib:
ϕ(a+ ib) = ϕ(a) + ϕ(i)ϕ(b) =
(a −bb a
).
Non e difficile verificare che questa funzione rispetta tutti i requisiti che avevamochiesto su di essa. Altrettanto facilmente si vede che questa notazione matriciale si prestaperfettamente ad essere utilizzata anche in forma polare:
ϕ(ρeiθ) = ρ
(cos θ − sin θsin θ cos θ
).
Possiamo anche notare un’elegante corrispondenza tra alcune delle operazioni fon-damentali che possiamo fare di volta in volta sui complessi o sulle matrici. La nor-ma complessa e legata al determinante, mentre l’operazione di congiugio diventa latrasposizione:
|z|2 = detϕ(z) z = [ϕ(z)]T .
2.2 I quaternioni
Il corpo H dei quaternioni e, in un certo senso, una specie di “estensione” dei complessi aquattro dimensioni, invece di due. Diciamo che i quaternioni formano un corpo invece diun campo per indicare che due quaternioni possono non commutare rispetto all’operazionedi prodotto.
Formalmente, i quaterioni si possono vedere come lo spazio vettoriale su R generatodalla base (1, i, j, k), dove le lettere i, j e k svolgono un ruolo analogo a quello di i in C.Ne segue banalmente che, come spazio vettoriale, H e isomorfo a R4.
Per definire un corpo ci manca solamente di definire un prodotto tra quaternioni.Dal momento che, essendo uno spazio vettoriale su R, H deve contenere una copia di
10

R stesso, imponiamo che tale copia sia il sottospazio generato da 1 e che 1 ∈ H sia,proprio come 1 ∈ R, l’elemento neutro del prodotto (giustificando cosı il simbolo sceltoper rappresentarlo).
A questo punto, definiamo formalmente come interagiscono tra loro le varie unitaimmaginarie:
i2 = j2 = k2 = −1,
ij = k, ji = −k, jk = i, kj = −i, ki = j, ik = −j
(per memorizzare meglio queste relazioni conviene associare il segno del risultato allasegnatura della permutazione di ijk nell’ordine in cui sono scritti). Notate che questerelazioni non sono tutte indipendenti: per esempio, assumendo la prima riga e le primedue uguaglianze della seconda si possono dimostrare le altre.
Poste queste condizioni (moltiplicazione per scalare indotta dal prodotto vettoriale eprodotto delle unita immaginarie), in realta l’intera operazione di prodotto risulta fissata.Siano infatti x, y ∈ H, con x = a+ ib+ jc+ kd e y = a′ + ib′ + jc′ + kd′. Allora:
xy = (a+ ib+ jc+ kd)(a′ + ib′ + jc′ + kd′) =
= aa′ + iba′ + jca′ + kda′ + aib′ + ibib′ + jcib′ + kdib′ +
+ ajc′ + ibjc′ + jcjc′ + kdjc′ + akd′ + ibkd′ + jckd′ + kdkd′ =
= (aa′ − bb′ − cc′ − dd′) + i(ab′ + ba′ + cd′ − dc′) +
+ j(ac′ + ca′ + db′ − bd′) + k(ad′ + da′ + bc′ − cb′). (2.1)
Si puo mostrare che tale prodotto, insieme con la somma indotta dalla struttura dispazio vettoriale, descrive un corpo sui quaternioni.
Come nel caso dei complessi, sui quaternioni e possibile definire una norma (banal-mente: |q|2 = a2 + b2 + c2 + d2) e un’operazione di coniugio (q = a− ib− jc− kd). Comenei complessi vale l’identita qq = |q|2, che, per q 6= 0, permette di trovare una formulaper l’inverso di un quaternione. Infatti, si puo ottenere:
q · q−1 = q · q
|q|2= 1.
Una interessante constatazione che si puo fare sui quaternioni e che l’anello dei poli-niomi a coefficienti nei quaternioni H[x] non e un dominio a fattorizzazione unica, dunquenon vale piu la regole che un poliniomio a tante radici quanto il suo grado. Per esempio,l’equazione q2 + 1 = 0 ha perlomeno sei radici distinte (le tre unita immaginarie e le loroinverse), che ad un’analisi un minimo piu attenta diventano infinite.
2.2.1 Quaternioni come sottoanello di matricisubs:quaternioni-sottoanello
E interessante notare che e possibile costruire il corpo dei quaternioni analogamentea quanto prima abbiamo fatto con i complessi, come sottoanello di M2(C). Vogliamocostruire una funzione ψ : H→M2(C) iniettiva e omomorfismo di anelli.
Omettendo tutti i passaggi logici visti prima, e chiaro che ψ deve mandare 1 in(1 00 1
). i e j devono andare in due matrici, distinte e non multiple tra di loro, entrambe
11

radici quadrate dell’inverso dell’unita. Per esempio, possiamo stabilire:
ψ(i) =
(i 00 −i
), ψ(j) =
(0 −11 0
).
A questo punto k e forzata:
ψ(k) = ψ(ij) = ψ(i)ψ(j) =
(i 00 −i
)(0 −11 0
)=
(0 −i−i 0
).
E, concludendo nello stesso modo di prima,
ψ(a+ ib+ jc+ kd) =
(a+ ib −c− idc− id a− ib
),
dove, nuovamente, omettiamo la dimostrazione completa che tale funzione e un omomor-fismo.
Analogamente a prima, valgono un paio di eleganti equivalenze: il coniugio tra i qua-ternioni viene rappresentato con la matrice coniugata trasposta, mentre il quadrato dellanorma corrisponde nuovamente al determinante.
2.3 Isometrie di Rn
A questo punto, consideriamo lo spazio Rn dotato del prodotto scalare standard:
(v, w) =n∑i=1
viwi.
Definiamo norma di un vettore ||v|| = (v, v) e distanza tra due vettori d(v, w) =||v − w||.
2.3.1 Matrici invertibili e ortogonali
Denotiamo con:
• Mn(R) = Matrici reali n× n
• GL(n,R) = A ∈Mn(R) : ∃A−1
• O(n,R) = A ∈Mn(R) : (Av,Aw) = (v, w) ∀v, w ∈ RnSi osserva che O(n,R) ⊂ GL(n,R) ⊂ Mn(R) e che GL(n,R) e O(n,R) sono gruppirispetto alla composizione di matrici. Inoltre, sappiamo che le seguenti sono equivalenti:
• A ∈ O(n,R);
• (Aei, Aej) = δij ∀i, j = 1, . . . , n;
• A manda basi ortonormali in basi ortonormali;
• le colonne di A formano una base ortonormale;
• le righe di A formano una base ortonormale;
• AT = A−1.
12

2.4 Alcuni esempi di O(n,R)
Dato che in questa sezione parleremo solo di gruppi ortogonali di matrici reali, scriveremosemplicemente On invece che O(n,R). Si puo dare per scontato che O1 = ±1 con ilprodotto standard, mentre il primo caso interessante e O2, cioe l’insieme delle trasforma- Forse sta nella prima lezio-
nezioni in R2 che conservano la norma. Dato che R2 e isomorfo a C, possiamo considerarele isometrie di C. Senza dubbio, le rotazioni (cioe la moltiplicazione per eiθ) e il coniugiosono isometrie di C. Ora vogliamo dimostrare che componendo rotazioni e coniugio pos-siamo ottenere qualunque isometria di C. Per fare questo premettiamo una definizioneed un paio di lemmi.
Definizione 2.1. Considerato un vettore w non nullo, chiamiamo riflessione di vettorew ed indichiamo con ρw la funzione da Rn in Rn che manda
x→ x− 2w〈x,w〉〈w,w〉
.
Intuitivamente, tale trasformazione, in uno spazio di dimensione n, riflette specu-larmente l’intero spazio rispetto all’(n − 1)-iperpiano perpendicolare al vettore w (ed,ovviamente, passante per l’origine). Anche dal punto di vista formale, e piuttosto sempli-ce mostrare che si tratta di una trasformazione ortogonale e che e un’involuzione (ossiache, elevata al quadrato, da l’identita).
lemma-ortogonale-in-riflessioni Lemma 2.2. Ogni trasformazione ortogonale di R2 puo essere scritta come composizionedi riflessioni.
Dimostrazione. Sia A un’isometria diversa dall’identita e tale che Ae1 6= e1. Definiamo:v = Ae1+e1
2e w = Ae1−e1
2. E immediato constatare che 〈v, w〉 = 0, ossia che i due vettori
sono ortogonali.Per come e stato scelto w, risulta che: ρw(Ae1) = Ae1−2w 〈Ae1,w〉〈w,w〉 = Ae1−Ae1+e1 = e1.
Analogamente, poiche e involutoria, ρw(e1) = Ae1.Poiche A conserva i prodotti scalari, si ha che Ae2⊥Ae1, quindi Ae2 giace sulla retta
ortogonale a e1 e ha norma 1, cosı come ρw(e2). Dunque puo accadere che ρw(e2) = Ae2,nel qual caso ρw = A, oppure che ρw(e2) = −Ae2, nel qual caso A = ρe2 ρw = ρw ρAe2 .
lemma-rotazioni-riflessione Lemma 2.3. La composizione di due riflessioni e una rotazione.
Dimostrazione. Il lemma puo essere facilmente provato osservando il determinante dellematrici che entrano in gioco.
Una matrice di riflessione ρw ha due autovalori reali: un pari a −1, corrispondenteal vettore w, ed un altro pari a 1, corrispondente ad un vettore ortogonale a w. Il suodeterminante e dunque pari al prodotto dei due autovalori, ossia −1.
La composizione di due riflessioni e dunque una matrice A ortogonale con determi-
nante 1. Sia
(a bc d
)tale matrice. Per l’ortogonalita di A, sia entrambi i vettori riga
che entrambi i vettori colonna hanno norma 1:
1 = a2 + b2 = c2 + d2 = a2 + c2 = b2 + d2.
13

Dunque c = ±b, d = ±a. Il determinante della matrice risulta quindi:
det
(a b±b ±a
)= ±a2 ∓ b2 = 1.
E evidente che entrambi i segni della seconda colonna devono essere positivi: infatti(tralasciando i casi banali in cui a o b sono nulli), se esattamente uno di essi e negativorisulta che uno tra a e b deve essere > 1, contro il fatto che a2 + b2 = 1. Se invece sonoentrambi negativi non possono avere somma 1.
Possiamo dunque concludere che a2 + b2 = 1. Sappiamo quindi che esiste θ tale chea = cos θ e b = sin θ. Questo e sufficiente per concludere che la matrice A ha forma:
A =
(cos θ − sin θsin θ cos θ
),
e dunque e una matrice di rotazione.
Tutte le trasformazioni di R2 sono generate dalle rotazioni e dal coniugio. Sia A unatrasformazione. Scomponiamo A come prodotto di riflessioni e consideriamo ciascuna diesse separatamente. Sia ρw una riflessione. Allora posso scrivere ρw = ρwρe2ρe2 (dove ρe2corrisponde all’operazione di coniugio). ρwρe2 e una rotazione, dunque abbiamo scritto ρwcome prodotto di rotazioni ed operazioni di coniugio. Ripetendo lo stesso ragionamentoper ognuna delle riflessioni che intervengono nella scomposizione di A, dimostriamo chetutto O2 e generato da rotazioni ed operazioni di coniugio.
2.4.1 Considerazioni algebriche
Raffinando leggermente i discorsi fatti sopra, possiamo vedere come una trasformazionepossa essere scomposta in una sola rotazione, eventualmente composta con una sola ope-razione di coniugio. Ripercorrendo la dimostrazione del lemma
lemma-ortogonale-in-riflessioni2.2, infatti, vediamo come
A possa essere scritta come ρw oppure come ρe2 ρw. Nel primo caso A = (ρw ρe2) ρe2(composizione di una rotazione ed un coniugio), nel secondo A e una semplice rotazione,per i motivi gia visti.
Possiamo descrivere questo fatto dicendo che, “in un certo senso” (il significato diquesta espressione andra poi chiarito), O2 = Z2 × S1, dove S1 e l’insieme dei complessidi norma unitaria: vogliamo in questo modo esprimere il fatto che per esprimere unatrasformazione di O2 posso semplicemente esprimere una rotazione (ossia un elemento diS1) e dire se a questa rotazione va aggiunto un coniugio oppure no (i due elementi di Z2).
Sottogruppi normali
Per poter dare un significato piu rigoroso all’uguaglianza enunciata (ossia per poterneestendere il significato alla struttura di gruppo che i vari enti coinvolti possiedono) enecessaria sviluppare un po’ piu a fondo la teoria astratta dei gruppi. Per ora limitiamociad una considerazione di importanza fondamentale in questo ambito.
Le rotazioni sono un sottogruppo normale di O2 (considerato come gruppo rispetto alprodotto righe per colonne).
14

Definizione 2.4. Diciamo che un sottogruppo H di un gruppo G e normale se vale laseguente relazione:
ghg−1 ∈ H ∀g ∈ G, h ∈ H. (2.2) condizione-normalita
Nel nostro caso, sia Θ il sottogruppo delle rotazioni (mostrare che e un sottogruppoe piuttosto banale), sia θα ∈ Θ una rotazione di angolo α e sia g ∈ G = O2. Se g e unarotazione pura, la relazione di prima e banalmente verificata. Sia dunque g = θβ C,indicando con θβ una rotazione di angolo β e con C l’operazione di coniugio. ghg−1 =(θβ C) θα (C−1 θ−1
β ) = (θβ C) θα (C θ−β). Applichiamo questa funzione ad unoz ∈ C:
g(h(g−1))(z) = eiβeiα(e−iβz) = e−iαz = θ−α(z).
A questo punto e chiaro che la relazione (condizione-normalita2.2) e soddisfatta, dunque S1 e un sottogrup-
po normale. Osserviamo che non e possibile dire la stessa cosa di Z2 come sottogruppodi O2.
Il significato della condizione di normalita e la sua importanza nell’ambito della teoriadei gruppi saranno chiariti nelle prossima lezione, nella quale chiariremo, come abbiamopromesso, anche il significato “profondo” della scrittura O2 = Z2 × S1.
15

16

Capitolo 3
Terza lezione (Filippo Callegaro,13/10/2009)
3.1 Riassuntino
Definizione 3.1. Si dice algebra (o algebra associativa su un campo K) uno spaziovettoriale V su K, con un prodotto interno · : V × V → V , con unita 1, associativo,distributivo a destra e a sinistra rispetto al + e tale che λv · εw = λε(v · w).
Esempio 3.2. Le matrici Mn(K) costituiscono un’algebra su K. H e un’algebra su C esu R. C e un’algebra su R.
Abbiamo detto che O2∼= S1×Z2 come prodotto di insiemi. Ora vogliamo capire cosa
succede a livello di gruppi.
3.2 Sottogruppi normali
Definizione 3.3. Un sottogruppo H < G e detto normale, e si indica con H C G, se∀g ∈ G,∀h ∈ H ghg−1 ∈ H, ossia gHg−1 ⊂ H.
Osservazione 3.4. Se H CG allora ∀g ∈ G gHg−1 = H
Dimostrazione. Sappiamo che ∀g ∈ G gHg−1 ⊂ H, e quindi abbiamo anche g−1H(g−1)−1 =g−1Hg ⊂ H. Da questo segue che H ⊂ gHg−1.
Definizione 3.5. Una mappa ϕ : G→ G′ gruppi e detta omomorfismo se
∀g1, g2 ∈ G ϕ(g1g2) = ϕ(g1)ϕ(g2).
Definizione 3.6. Si dice nucleo di un omomorfismo ϕ e si indica con Kerϕ l’insiemeg ∈ G | ϕ(g) = eG′.
Osservazione 3.7. KerϕCG, Imϕ < G′.
Dimostrazione. Vediamo innanzitutto che Kerϕ e un sottogruppo.
17

• eG ∈ Kerϕ. Infatti ϕ(e) = ϕ(ee) = ϕ(e)ϕ(e), da cui la tesi per la legge dicancellazione.
• Se g, h ∈ Kerϕ, allora gh ∈ Kerϕ. Infatti ϕ(gh) = ϕ(g)ϕ(h) = ee = e.
• Se g ∈ Kerϕ allora g−1 ∈ Kerϕ. Infatti e = ϕ(e) = ϕ(gg−1) = ϕ(g)ϕ(g−1), dunqueϕ(g−1) = eϕ(g)−1 = ee−1 = e.
La normalita segue dal fatto che ∀g ∈ G, x ∈ Kerϕ,
ϕ(gxg−1) = ϕ(g)ϕ(x)ϕ(g−1) = ϕ(g)eϕ(g−1) = ϕ(gg−1) = e.
Per quanto riguarda Imϕ:
• eG′ = ϕ(eG) ∈ Imϕ.
• Se ϕ(a), ϕ(b) ∈ Imϕ, allora ϕ(a)ϕ(b) = ϕ(ab) ∈ Imϕ.
• In generale vale che ϕ(g)−1 = ϕ(g−1). Infatti e = ϕ(gg−1) = ϕ(g)ϕ(g−1), da cuiϕ(g−1) e l’inverso di ϕ(g), che e la tesi.
Definizione 3.8. Un omomorfismo in cui coincidono i gruppi di partenza e di arrivo sidice endomorfismo.
Un omomorfimo bigettivo si dice isomorfismo.Un endomorfismo bigettivo, ossia un isomorfismo in cui coincidono gli insiemi di
partenza e di arrivo, si dice automorfismo.
Esercizio 3.9. Dimostrare che l’insieme AutG degli automorfismi di G e un gruppo conl’operazione di composizione.
Fissato un elemento g ∈ G, dimostrare che l’applicazione Cg : G → G, tale chex 7→ gxg−1, e un automorfismo (detto congiugio rispetto a g.
Definizione 3.10. Si dice coniugio la mappa C : G → Aut(G) che manda l’elementog ∈ G nell’automorfismo Cg definito nell’esercizio precedente.
Esercizio 3.11. Dimostrare che il coniugio C e un omomorfismo.
Osservazione 3.12. Se N C G allora, per definizione, ∀g ∈ G,Cg(N) = N . Possiamoquindi considerare la restrizione C ′ di C a N e vedere che C ′ : G → Aut(N) definitocome sopra e ancora un omomorfismo.
Abbiamo detto che in ogni omomorfismo il nucleo e un sottogruppo normale. L’impor-tanza dei sottogruppi normali risiede soprattutto nel fatto che vale anche l’implicazioneopposta, ossia ogni sottogruppo N normale in un gruppo G puo essere visto come il nu-cleo di un’opportuno omomorfismo ϕ : G→ G′, dove G′ e un gruppo adeguato. Questo ecio che ci accingiamo a dimostrare. Premettiamo una
Definizione 3.13. Sia H < G. Allora, dato un elemento g ∈ G, l’insieme gH e dettolaterale sinistro (o classe laterale sinistra) di H in G. In altri termini gH = gh | h ∈ H.Analogamente si definisce Hg come laterale destro di H.
18

Una caratteristica importante dei laterali di un sottogruppo H e che formano unapartizione dell’insieme G di partenza. Per dimostrare questo dobbiamo far vedere che laloro unione copre tutto G e che due laterali o sono disgiunti o sono coincidenti.
Per quanto riguarda l’unione, notiamo che ogni g ∈ G appartiene al laterale gH, edunque l’unione dei laterali comprende tutto G.
Per la seconda parte, supponiamo che esistano gH e kH tali che a ∈ gH ∩ kH. Alloraabbiamo a = gh1 = kh2, da cui k = gh1h
−12 = gh3, per un opportuno h3, e dunque
k ∈ gH e kH = gh3H = gH. Questo vuol dire che i due laterali coincidono.Questi sottoinsiemi di G non hanno in generale nulla di speciale. Tuttavia, se N CG,
abbiamo che il prodotto di due laterali sinistri di N e ancora un laterale sinistro, edanalogamente per i destri. Avendo questa operazione di prodotto a disposizione, potremoprovare a costruire un gruppo formato dalle classi laterali di N .
Siano dunque Na e Nb due laterali di N ; abbiamo che NaNb = NaN(a−1a)b =N(aNa−1)ab = NNab = Nab. Chiaramente NN = N , perche N , essendo un sottogrup- Evviva il bieco trucco!
po, e chiuso rispetto al prodotto di G.Chiamiamo G/N l’insieme dei laterali destri Na in G. Possiamo ora dimostrare che
G/N e un gruppo. Abbiamo appena visto che e chiuso per il prodotto tra laterali definitosopra. Questo prodotto e associativo in quanto lo era il prodotto fra elementi di G. Sivede immediatamente che N = Ne stesso svolge il ruolo di elemento neutro, in quantoNaNe = NN(ae) = Na ∀Na ∈ G/N (ed, analogamente, NeNa = NN(ea) = Na).Infine, dato un laterale Na, notiamo che il laterale Na−1 si comporta come suo inverso,in quanto NaNa−1 = N = Na−1Na.
Consideriamo ora questa mappa:
ϕ : G → G/N
a 7→ Na.
Vogliamo dimostrare che e un omomorfismo fra gruppi. Dobbiamo quindi verificare cheϕ(ab) = ϕ(a)ϕ(b)∀a, b ∈ G. Questo segue subito dal fatto che ϕ(ab) = Nab = NaNb =ϕ(a)ϕ(b).
Vogliamo ora trovare il nucleo di questa applicazione ϕ, ossia l’insieme degli a ∈ Gtali che ϕ(a) = N , l’elemento neutro del gruppo di arrivo. Dunque ϕ(a) = Na = N .Questo accade per tutti e soli gli elementi a ∈ N , e dunque possiamo affermare che ilKerϕ e proprio N .
Abbiamo quindi costruito, dato un gruppo G ed un sottogruppo N CG, un omomor-fismo avente N come nucleo.
3.2.1 Prodotto semidiretto
Per definire una struttura di gruppo su O2 dobbiamo introdurre un prodotto di sot-togruppi, di cui uno normale, detto prodotto semidiretto. L’idea del prodotto semidi-retto e che se abbiamo un sottogruppo H e un sottogruppo normale N di un grup-po G si nota che NH = nh | n ∈ N, h ∈ H e chiuso ripetto al prodotto. Infattinhn1h1 = nhn1h
−1hh1 = nn2hh1, dove abbiamo usato in modo sostanziale la normalitadi N .
Pertanto adesso introduciamo il prodotto semidiretto.
19

Definizione 3.14. Siano N , H gruppi. Sia ϕ : H → AutN omomorfismo (d’ora in poiindichiamo l’automorfismo ϕ(h) con ϕh).
Si definisce prodotto semidiretto mediante ϕ l’insieme N oϕH = (n, h) | n ∈ N, h ∈H con la seguente operazione componente per componente:
(n1, h1) · (n2, h2) = (n1 · ϕh1(n2), h1 · h2).
Esercizio 3.15. N oϕ H e un gruppo con elemento neutro (eN , eH) (basta fare tutte leverifiche con la definizione).
In particolare notiamo che se N e H sono sottogruppi di G con N normale, allora c’eun modo molto intuitivo di inventarsi la nostra mappa ϕ, che e quello di usare il coniugioC : H → AutN .
Notiamo che, poiche N e normale, il coniugio per h e un endomorfismo di N (infattihNh−1 ⊂ N). Notiamo in particolare che e un automorfismo, infatti e bigettiva (si dimo-stra scrivendo la funzione inversa: il coniugio per h e, infatti, l’inverso del coniugio perh−1, provare per credere!).
Osservazione 3.16. Dati N , H gruppi, si ha che (N, eH) C (N o H), indicando con(N, eH) l’insieme (n, eH) | n ∈ N.
Dimostrazione. Sia π : N o H → H la proiezione (n, h) 7→ h. Essa e un omomorfismo,perche:
π((n1, h1) · (n2, h2)) = π((n1ϕh1(n2), h1h2)) =
= h1h2 =
= π(n1, h1)π(n2, h2).
Qual e il nucleo di π? Ma chiaramente e proprio lui, (N, eH). Infatti
Ker π = (n, h) | π((n, h)) = e =
= (n, h) | h = e =
= (n, eH) | n ∈ N =
= (N, eH).
Poiche il nucleo e un sottogruppo normale del gruppo di partenza, si ha che (N, eH) enormale.
Prima di dimostrare il prossimo teorema, premettiamo un lemma, molto importantein tutta la teoria dei gruppi, e una definizione.
Lemma 3.17. Dato un qualunque omomorfismo τ : G → G′ gruppi qualunque, allora τe iniettivo se e solo se Ker τ = eG.
Dimostrazione. L’elemento neutro appartiene sempre a Ker τ , perche il nucleo e un sotto-gruppo. Se τ e iniettivo, allora il nucleo non puo contenere altri elementi oltre all’elementoneutro, altrimenti ci sarebbero due elementi diversi la cui immagine e eG′ , e l’omomorfismosarebbe un po’ poco iniettivo.
Viceversa vogliamo dimostrare che se Ker τ = eG, allora τ e iniettiva.
20

Siano x ∈ G, y ∈ G tali che τ(x) = τ(y). Vogliamo dimostrare che x = y. τ(x)(τ(y))−1 =eG′ , ma (τ(y))−1 = τ(y−1) per quanto visto sopra, dunque τ(x)(τ(y))−1 = τ(x)τ(y−1) =eG′ . Poiche τ e omomorfismo otteniamo τ(xy−1) = eG′ , cioe xy−1 ∈ Ker τ = eG. Questosignifica che xy−1 = eG, da cui x = y.
Definizione 3.18. Sia G un gruppo e S ⊆ G un suo sottoinsieme (non necessariamentea sua volta un gruppo). Chiamiamo sottogruppo generato da S e indichiamo con 〈S〉l’insieme di tutti i prodotti di finiti elementi di S o di loro inversi.
Se H e K sono sottogruppi di G, inoltre, indicheremo il sottogruppo 〈H ∪ K〉 piubrevemente come HK.
Esercizio 3.19. Dimostrare che 〈S〉 e effettivamente un sottogruppo di G, e che e con-tenuto in ogni sottogruppo di G che contenga S (ossia e il piu piccolo sottogruppo di Gche contiene S).
Teorema 3.20. Sia G gruppo. Siano ora N C G e H < G con N ∩H = e e G = NH.Allora G e isomorfo al prodotto semidiretto di N e H (G ∼= N oH), in modo tale che lamappa ϕ del prodotto semidiretto sia il coniugio, ovvero ϕ : H → Aut(N) manda h 7→ ϕh,dove ϕh : N → N e il coniugio per H.
Dimostrazione. Per cominciare voglio dire che ogni elemento g ∈ G si scrive in modounico come prodotto di un elemento di N e uno di H. Infatti ogni g ∈ G si scrive comeprodotto finito di termini in N e in H, per ipotesi:
g = n1h1n2h2 . . . nkhk.
Ma noi possiamo sfruttare la normalita di N con il bieco trucco dell’algebra:
g = n1h1n2(h−11 h1)h2 . . . nkhk =
= n1(h1n2h−11 )h1h2 . . . nkhk =
= (n1n′2)(h1h2) . . . nkhk =
= n′h′ . . . nkhk.
Iterando il procedimento possiamo raggiungere la configurazione g = nh.Adesso dimostriamo che questa scrittura e unica. Se per assurdo g = n1h1 = n2h2,
allora n−12 n1 = h2h
−11 = e, perche l’intersezione tra i due gruppi e il solo elemento neutro.
Ma da cio si ricava facilmente che n1 = n2 e che h1 = h2, cosı la scrittura di g e unica.Allora la seguente mappa e ben definita: ψ : G ∈ N o H che manda ogni elemento
g 7→ (n, h), dove n e h sono gli unici elementi rispettivamente di N e H tali che g = nh.In tale mappa l’applicazione ϕ e il coniugio, come detto nell’enunciato.
Verifichiamo che ψ e un omomorfismo, e suriettivo e che il suo nucleo e il solo elementoneutro (che equivale a dimostrare che ψ e iniettiva). In tal caso la nostra mappa sarebbeun isomorfismo di gruppi.
Vediamo innanzitutto che ψ e un omomorfismo:
gg′ = nhn′h′ = n(hn′h−1)hh′ = nϕh(n′)hh′,
percioψ(gg′) = (nϕh(n
′), hh′) = (n, h)(n′, h′) = ψ(g)ψ(g′).
21

Abbiamo provato che ψ e un omomorfismo. Si vede banalmente che esso e suriettivo,perche preso un elemento (n, h) ∈ N oH l’elemento g = nh e tale che ψ(g) = (n, h).
Manca da dimostrare che ψ e iniettivo.Ci basta dunque dimostrare che Kerψ = e. Infatti e ∈ Kerψ perche il Kerψ e un
sottogruppo (per quanto visto sopra). Inoltre se g ∈ Kerψ, allora ψ(g) = (e, e), cioeg = ee = e. Quindi il Kerψ e fatto solo dall’elemento neutro, e la nostra mappa ψ e unomomorfismo iniettivo e suriettivo, cioe un isomorfismo.
Adesso abbiamo tutti gli strumenti per dimostrare che O2∼= Z2nS1, dove la mappa ϕ :
Z2 → AutS1 e quella che manda 1 7→ idS1 e che manda −1 7→ ϕ−1, che e l’automorfismodi S1 che manda, in coordinate polari, (1, θ) 7→ (1,−θ).
22
Capitolo 4
Quarta lezione (Angelo Vistoli,14/10/2009)
4.1 Proprieta delle permutazioni
Vorremmo ora definire in maniera formale il concetto di “scambiare tra loro di posto glielementi di un insieme finito” che non e troppo matematico messo cosı.
Ora, cominciamo col definire un rappresentante canonico per tutti gli insiemi chehanno n elementi, fantasiosamente lo chiameremo n e sara
Definizione 4.1. n = 1, . . . , n.
ora possiamo lavorare in n, tanto poi basta definire un funzione biunivoca che colleghiil primo elemento col numero 1, il secondo col 2, il terzo col 3. . . Insomma avete capito,e comporla con qualunque funzione che definiamo in n.
E facile notare che ogni scambio di posto non e altro che una funzione biunivoca da n inse, questa funzione semplicemente mandera ogni elemento nell’elemento che rappresentail suo posto dopo che li abbiamo scambiati. E abbastanza evidente che non ce ne possanostare due nello stesso posto (niente ex aequo) e, per motivi di spazio, neppure posti vuoti;d’altronde ogni funzione biettiva puo essere vista come la ‘mappa’ di uno di questi scambi,quindi ora opereremo questa fantastica definizione:
Definizione 4.2. Una permutazione e una funzione bigettiva da n in n.
Dove ‘permutazione’ e un modo forbito per dire ‘scambio di posto’.
Osservazione 4.3. Le permutazioni su n sono n!.
Osservazione 4.4. Le permutazioni su n sono un gruppo rispetto alla composizione;l’elemento neutro e l’identita. Tale gruppo e detto gruppo simmetrico su n elementi esi denota con Sn.
Ora vogliamo definire delle specie di permutazioni elementari, cioe quelle che scam-biano tra loro solo due elementi
Definizione 4.5. Dati i e j in n con i 6= j si dice trasposizione di i, j la permutazione
23

σi,j(k) =
k se k 6= i, j
i se k = j
j se k = i
con k ∈ n.
Osservazione 4.6. σi,j σi,j = idn
Una volta fatto questo quello che vorremmo dire e che un qualunque rimescolamen-to tra gli elementi di un insieme finito puo essere ottenuto facendo tante di questetrasposizioni tra gli elementi dell’insieme, questo e vero per il seguente teorema
Teorema 4.7. Ogni permutazione si scrive come composizione di trasposizioni.
Dimostrazione. Procediamo per induzione;
• Caso base: con n = 1 l’unica permutazione e l’identita, composizione di 0 traspo-sizioni.
• Passo induttivo: sia τ un elemento di Sn. Sia k = σ(n). La permutazione ρ =σ1,kτ , ristretta all’insieme n− 1, e un elemento di Sn−1, che sappiamo scrivere comecomposizione di trasposizioni. Ne segue che possiamo scrivere anche τ = σ1,k ρcome composizione di trasposizioni.
Osservazione 4.8. Se τ = σ1 · · · σk e un elemento di Sn, il suo inverso τ−1 e ugualea σk · · · σ1.
Si puo notare che, in generale, questa scomposizione non e unica, anzi. E lecito perodomandarsi se ci sia qualcosa in comune tra tutte le scomposizioni possibili, la risposta edata dal seguente teorema.
Teorema 4.9. Se τ ∈ Sn si scrive come composizione di l o di k trasposizioni alternati-vamente allora (−1)l = (−1)k
Dimostrazione. Non richiesta
Chiamiamo questa “invariante” segno.
Definizione 4.10. Se τ si scrive come composizione di k trasposizioni definiamo (−1)k
il segno di τ , che si indica con sgn(τ)
Definizione 4.11. Le permutazioni con segno −1 sono dette dispari, quelle con segno1 pari.
Osservazione 4.12. sgn(id) = 1
Osservazione 4.13. sgn(τ ρ) = sgn(τ) · sgn(ρ)
24

4.2 Forme multilineari
Iniziamo col definire le forme multilineari.
Definizione 4.14. Siano V,W spazi vettoriali su un campo K e r un intero positivo. Unafunzione r-multilineare da V in W e una funzione h : V r → W lineare in ogni variabile.
Esempio 4.15. Se V = W = Mn(K), la funzione h(A1, . . . , Ar) = A1 · · · · · Ar e unafunzione r-multilineare.
Ora, le forme multilineari sono moltissime, possiamo pero definire delle categorie piuspecifiche come ad esempio le funzioni multilineari simmetriche e le funzioni multilinearialternanti.
Definizione 4.16. Sia h : V r → W una funzione r-multilineare. h si dice simmetrica se,∀i, j con 1 ≤ i < j ≤ r, ∀v1, . . . , vr ∈ V , si ha h(v1, . . . , vr) = h(v1, . . . , vi−1, vj, vi+1, . . . , vj−1, vi, vj+1, . . . , vr).
Osservazione 4.17. Se h e una funzione r-multilineare, h e simmetrica se e solo se,∀σ ∈ Sr, ∀v1, . . . , vr ∈ V , si ha h(v1, . . . , vr) = h(vσ(1),...,vσ(r)
). Questo segue dal fatto cheogni permutazione e composizione di trasposizioni.
Definizione 4.18. Sia h : V r → W una funzione r-multilineare. h si dice alternan-te o antisimmetrica se, ∀i con 1 ≤ i < r, ∀v1, . . . , vr ∈ V , si ha h(v1, . . . , vr) =−h(v1, . . . , vi+1, vi, . . . , vr).
Osservazione 4.19. Se h e una funzione r-multilineare, h e alternante se e solo se,∀σ ∈ §r, ∀v1, . . . , vr ∈ V , si ha h(v1, . . . , vr) = sgn(σ) · h(vσ(1),...,vσ(r)
).
Teorema 4.20. Sia h : V n → W , con V spazio vettoriale su R o C una funzionen-multilineare. Allora h e alternante se e solo se vi = vj, i 6= j ⇒ h(v1, . . . , vn) = 0.
Esempio 4.21. Il classico prodotto vettoriale e una funzione multilineare alternante daR3 × R3 in R3.
Esempio 4.22. Dato un campo K e n vettori v1, . . . , vn ∈ Kn, la funzione che associa aglin vettori il determinante della matrice di cui sono le colonne e una funzione n-multilinearealternante.
Osservazione 4.23. Sia V un K-spazio vettoriale di dimensione finita, h una funzionemultilineare da V × V in K, e sia A ∈ Mn(K) la matrice associata ad h rispetto ad unabase di V ; allora
h alternante ⇔ A e antisimmetrica.
Osservazione 4.24. Se Φ : V k → T e k-multilineare alternante e f : T → Z e lineareallora f Φ e k-multilineare alternante.
25

4.3 Potenze esterne
Definiamo ora le potenze esterne.
Definizione 4.25. Sia V spazio vettoriale su K e k intero positivo. Un K-spazio vetto-riale si dice potenza esterna, e si indica con ΛkV se esiste una funzione k-multilinearealternante, che associa a (v1, . . . , vk) ∈ V k l-elemento v1 ∧ · · · ∧ vk ∈ ΛkV , che soddisfila seguente proprieta: dato un qualunque K-spazio vettoriale W e una qualsiasi funzionek-multilineare alternante h : ΛkV → W , esiste un’unica funzione lineare h : ΛkV → Wtale che h(v1, . . . , vk) = h(v1 ∧ · · · ∧ vk).
V k v1 ∧ · · · ∧ vk- ΛkV
W
h
?
h
Definizione 4.26. La funzione definita sopra, che associa a (v1, . . . , vk) ∈ V k l’elementov1 ∧ · · · ∧ vk ∈ ΛkV , e detta prodotto esterno.
Teorema 4.27. Supponiamo che ΛkV e ΛkV siano due potenze esterne, allora esiste
un unico isomorfismo di K-spazi vettoriali ϕ : ΛkV → ΛkV tale che ϕ(v1 ∧ · · · ∧ vk) =v1∧ . . . ∧vk.
Dimostrazione. Per definizione di potenza esterna esiste un’unica funzione lineare ϕ :
ΛkV → ΛkV tale che ϕ(v1∧· · ·∧vk) = v1∧ . . . ∧vk analogamente esiste un’unica funzione
ϕ : ΛkV → ΛkV tale che ϕ(v1∧ . . . ∧vk) = v1∧· · ·∧vk. da questo segue che ϕϕ(v1∧· · ·∧vk) = v1 ∧ · · · ∧ vk∀v1, . . . , vk ∈ V per definizione di potenza esterna sappiamo che esisteun’unica funzione ψ da ΛkV in se tale che ψ(v1 ∧ · · · ∧ vk) = v1 ∧ · · · ∧ vk∀v1, . . . , vk ∈ Vdato che sia l’identita di ΛkV che ϕ ϕ soddisfano questa prorpieta segue che entrambesono uguali a ψ e, per la proprieta transitiva dell’uguaglianza sono uguali tra loro. Allo
stesso modo si dimostra che ϕ ϕ e l’identita di ΛkV . Questo significa che ϕ e ϕ sonol’una l’inversa dell’altra ovvero che ϕ e biiettiva, per cui e un’isomorfismo.
V k v1 ∧ · · · ∧ vk- ΛkV
ΛkV
v1 ∧ · · · ∧ vk?
ϕϕ = id
Osservazione 4.28. Sapere che ϕ ϕ(v1 ∧ · · · ∧ vk) = v1 ∧ · · · ∧ vk∀v1, . . . , vk ∈ V e eviceversa non e sufficiente per concludere: infatti, non sappiamo (ed in effetti non e vero)che v1 ∧ · · · ∧ vk copra, al variare di v1, . . . , vk, tutto ΛkV .
26

Teorema 4.29. Sia ΛkV una potenza esterna; allora v1 ∧ · · · ∧ vk | v1, . . . , vk ∈ V genera ΛkV .
Dimostrazione. Sia W il sottospazio di ΛkV generato da v1 ∧ · · · ∧ vk |v1, . . . , vk ∈ V .Allora W e una potenza esterna; infatti e contenuto in ΛkV , che gode della proprieta checaratterizza le potenze esterne, e contiene tutti gli elementi che si scrivono come prodottiesterni di elementi di V . Per il teorema precedente, essendo ΛkV e W potenze esterne,esiste un isomorfismo fra i due spazi: sia esso ϕ : W → ΛkV . Tale isomorfismo, per comee stato costruito nella dimostrazione precedente, e unico, dunque e l’immersione di W inΛkV . Dunque risulta che il sottospazio W coincide effettivamente con tutto ΛkV , che ela tesi.
Osservazione 4.30. Vale la pena notare che, poiche non sappiamo ancora che la potenzaesterna ha dimensione finita, il fatto che W e ΛkV siano isomorfi tra di loro non implicadi per se che W non sia un sottospazio stretto. Per esempio, le successioni a valori realisono isomorfe al sottospazio (proprio) delle successioni il cui primo elemento e 0, nelmodo ovvio.
In questo caso e possibile concludere poiche sappiamo che tale isomorfismo e l’immer-sione del sottospazio nella potenza esterna.
27

28

Capitolo 5
Quinta lezione (Filippo Callegaro,20/10/2009)
Riepilogo
Abbiamo concluso la scorsa lezione dimostrando che
O(2) ∼= S1 o Z2.
Esercizio 5.1. Lasciamo per esercizio i seguenti risultati:
• Trovare i sottogruppi finiti di SO(2).
• Trovare i sottogruppi finiti di O(2).
5.1 Struttura di O(3) e SO(3)
Analizziamo ora la struttura di O(3) ed SO(3):
O(3) := A ∈M3(R)|AAT = I, SO(3) := A ∈M3(R)|AAT = I, detA = 1.
Come in O(2), notiamo che anche gli elementi di O(3) sono bipartiti in due insiemi inbigezione tra loro, corrispondenti ai due possibili valori del determinante: +1 e −1.
Per avere una bigezione tra i due, e sufficiente considerare la mappa
A 7→ −A.
In formula
O(3) = SO(3) t (−SO(3)).
S3 Definizione 5.2. Si indica con S3 l’insieme
S3 =x ∈ R4 : ||x|| = 1
= q ∈ H|qq = 1
29

Osservazione 5.3. La norma dei quaternioni e moltiplicativa: |ab| = |a||b|.Per provare questo fatto, cominciamo notando che i quaternioni si possono immergere,
come visto, nelle matrici 2× 2 a coefficienti complessi. Sia s(q) la matrice associata a q;si ha allora det s(q) = |q|2, e da questo segue
|ab|2 = det(s(ab)) = det(s(a)s(b)) = det(s(a)) det(s(b)) = |a|2|b|2.
Osservazione 5.4. S3, come sottoinsieme dei quaternioni, forma un gruppo con l’opera-zione di prodotto di H. Questo segue dal fatto che la norma dei quaternioni, come visto,e moltiplicativa.
Vogliamo ora procedere ad indagare la struttura di O(3) costruendo un omomorfismoda S3 in SO(3).
5.1.1 Una prima relazione tra quaternioni e rotazioni
Cominciamo notando che ogni x ∈ H∗ definisce un’applicazione naturale sx : H → Hdata da sx(q) = xq. In particolare, definendo Big(H) := f : H → H|f bigettiva,l’applicazione
S : H∗ → Big(H)
tale che S(x) = Sx, e un omomorfismo di gruppi.Se ||x|| = 1, poi, l’applicazione Sx puo essere vista come un elemento di O(4), in
quanto e un’isometria: ||sx(q)|| = ||xq|| = ||x|| · ||q|| = 1 · ||q|| = ||q||. Abbiamo alloradefinito un omomorfismo da S3 in O(4).
5.1.2 Un omomorfismo da S3 in O(3)
Consideriamo ora la mappaρ : H∗ → Big(H)
che manda x ∈ H∗ nell’applicazione ρx : H→ H tale che ρx(α) = xαx.Per ogni x ∈ S3, l’applicazione ρx e un’isometria di H, e cioe, identificando i quater-
nioni con uno spazio vettoriale di dimensione 4 su R, un’isometria di R4: ρx ∈ O(4).Inoltre vale la seguente identita
ρxy(α) = xyαy · x = x(ρy(α))x = ρx ρy(α)
che dice che ρ : S3 → O(4) e un omomorfismo.Vogliamo ora mostrare che possiamo associare ad ogni quaternione una rotazione di
uno spazio vettoriale reale tridimensionale, ossia di un elemento di O(3).Fissiamo infatti x ∈ S3, e valutiamo ρx(y) per y ∈ R ⊂ H. Si ha
ρx(y) = xyx = yxx = y||x||2 = y,
percio ρx lascia fissa (punto per punto) la copia di R che possiamo identificare con< 1 >= span1 nei quaternioni.
Abbiamo gia mostrato che ρx e un’isometria: da questo segue immediatamente che,dato che essa lascia fisso R, manda in se anche R⊥ =< i, j, k >= spani, j, k.
30

In particolare, possiamo considerare la restrizione di ρx a R⊥, che e uno spazio vet-toriale di dimensione 3 su R, ed interpretare tale restrizione come isometria di R3, ossiacome elemento di O(3).
Abbiamo in tal modo costruito un omomorfismo da S3 in O(3), che continuiamo adenotare con ρ.
5.1.3 Immagine di ρ
Prima di procedere, dimostriamo un semplice risultato sulla moltiplicazione dei quater-nioni:
Teorema 5.5. Siano u, v quaternioni privi di parte reale. Allora vale
uv = −〈u, v〉+ u ∧ v
intendendo con <,> il prodotto scalare standard su R3 e con ∧ il prodotto vettore.
Dimostrazione. Potremmo ovviamente sviluppare semplicemente i conti, ma preferiamoprocedere come segue.
Essendo u, v privi di parte reale, possiamo scrivere u = a1i+a2j+a3k, v = b1i+ b2j+b3k; si ha allora
uv = −∑m
ambm + (a1i+ a2j + a3k) ∧ (b1i+ b2j + b3k)
in quanto il prodotto tra due unita dei quaternioni e definito esattamente come ilprodotto vettore se le due unita sono diverse, e da −1 quando un’unita viene moltiplicataper se stessa.
La dimostrazione e allora conclusa, in quanto∑
m ambm = 〈u, v〉.
Ci proponiamo ora di dimostrare che l’immagine di ρ e contenuta non solo in O(3),ma in SO(3). Di questo fatto diamo due dimostrazioni e l’accenno di una terza.
Prima dimostrazionePer la formula di moltiplicazione appena dimostrata sappiamo che su quaternioni
ortogonali la moltiplicazione equivale al prodotto vettore di R3.E poi ovvio che i, j, k sia una base ortonormale destrorsa dello spazio R⊥. Per veri-
ficare che ρx ∈ SO(3) basta allora controllare che ρx(i)ρx(j) = ρx(k), dal momento cheρx(i), ρx(j), ρx(k) deve ancora essere una base ortogonale (e ci basta quindi verificare seessa sia destrorsa o meno).
Ma questa verifica e immediata, dato che
ρx(i)ρx(j) = xixxjx = x(ij)x = xkx = ρx(k)
Seconda dimostrazioneOsserviamo preliminarmente che H \ R e connesso, mentre l’insieme ±1 e discon-
nesso. Consideriamo allora l’applicazione
31

ψ : S3 → ±1
definita da x 7→ det(ρx), interpretando ovviamente ρx come elemento di M3(R).Questa applicazione e continua, in quanto composizione della funzione determinante
(che e continua, in quanto polinomiale negli elementi della matrice a cui e applicato) edella funzione ρ.
Per quel che riguarda la continuita di ρ e sufficiente notare che la matrice che rap-presenta ρx ha gli elementi che dipendono polinomialmente dalle coordinate di x rispettoalla base 1, i, j, k di H.
Ne segue che la funzione ψ e continua e mappa quindi connessi in connessi. Dalmomento che ±1 e disconnesso, l’immagine puo essere solamente un punto. Ma d’altraparte ψ(1) = +1, dunque 1 ∈ Imψ ⇒ Imψ = 1, il che equivale alla tesi.
Terza dimostrazioneE possibile scrivere esplicitamente la matrice M ∈ M4(R) che rappresenta l’applica-
zione sx. Questa e una rotazione se e soltanto se ha determinante +1; per l’immersione deiquaternioni nelle matrici M2(C) che abbiamo costruito, noi sappiamo che questa matriceha determinante |q|2 = +1.
Allo stesso modo, la moltiplicazione per un quaternione ∈ S3 a destra e rappresentatada una matrice a determinante +1, e da questo segue che anche ρx e rappresentata dauna matrice di determinante positivo: essa e infatti il prodotto delle due matrici cherappresentano le moltiplicazioni a destra e sinistra per i due quaternioni, entrambe adeterminante +1.
5.1.4 Proprieta dell’omomorfismo ρ
Vogliamo ora dimostrare che l’omomorfismo ρ precedentemente definito e surgettivo evale ker ρ = ±1
• ker ρ = ±1
Osservazione 5.6. Notare che x ∈ ker ρ non vuol dire che ρx = 0, ma che ρx el’applicazione identita!
±1 appartengono ovviamente a ker ρ, perche ρ1 e l’applicazione identita: ρ1(α) =1α1 = α, e similmente ρ−1(α) = (−1)α(−1) = α e l’identita.
Viceversa, supponiamo che la funzione ρα sia l’identita su tutto H. Allora, inparticolare, vale
ρ(α) = α⇔ xαx = α⇔ xα = αx
in quanto xx = 1 per definizione di S3.
Ci proponiamo ora di mostrare che gli unici elementi di S3 che commutano con ogniquaternione sono solo ±1: infatti, scrivendo x = a+ bi+ cj + dk troviamo che
xi = ix⇔ −b+ ai− ck + dj = −b+ ai+ ck − dj ⇔ c = d = 0.
32

Similmente, usando α = j, si conclude b = c = d = 0; allora x e puramente reale, eper essere un elemento di S3, cioe avere norma 1, deve essere ±1, e questo concludela dimostrazione.
Se, infine, introduciamo il centro:
centro Definizione 5.7. Si dice centro di un gruppo G, e si denota Z(G), l’insieme
g ∈ G|gx = xg ∀x ∈ G
allora, in particolare, dalle considerazioni precedenti segue che ker ρ ⊂ Z(S3); anzi,per le proprieta di S3, questa e un’uguaglianza.
Osservazione 5.8. Il centro di G e un sottogruppo normale: in formule,
Z(G)CG.
Per dimostrare questo fatto, notiamo che se z ∈ Z(G) e z 7→ gzg−1 e un coniugio,allora gzg−1 = gg−1z = z perche z commuta con ogni altro elemento, e quindi ilcentro e lasciato fisso dal coniugio.
• ρ e surgettiva su SO(3).
Procediamo considerando gli elementi di SO(3): questi sono rotazioni intorno adun’asse, ossia sono univocamente determinati da un vettore v ∈ S2, l’asse dirotazione, e da un α ∈ [0, 2π[, l’angolo di rotazione.
In realta questo lascia ancora una ambiguita sul verso della rotazione, corrispon-dente al fatto di scegliere una terna di assi destrorsa o sinistrorsa.
Al fine di eliminare questa ambiguita, introduciamo la seguente
base positiva Definizione 5.9. Una base ortonormale v1, v2, v3 si dice positiva rispetto alla basecanonica e1, e2, e3 se la matrice ortogonale che trasforma e1, e2, e3 in v1, v2, v3 hadeterminante positivo.
Concordiamo allora che la rotazione di vettore v ed angolo α e quell’unica trasfor-mazione tale che esista una base ortonormale positiva in cui la matrice ad essaassociata si scriva 1 0 0
0 cos(α) sin(α)0 − sin(α) cos(α)
E evidente che queste sono tutte e sole le trasformazioni di SO(3): vogliamo oradescrivere questi oggetti tramite il nostro morfismo ρ.
Fissiamo allora v ∈ S2 e θ ∈],−π, π]. Con le consuete identificazioni, v ∈ S2 ⊂R3 =< i, j, k >, cioe v e un quaternione di parte reale nulla e di modulo 1.
33

Come ogni quaternione, v commuta con 1, e d’altra parte, come e ovvio, commutacon se stesso, percio commuta con < 1, v >R, con questo simbolo intendendo lospan di 1, v in uno spazio vettoriale reale.
Valgono ora le seguenti proprieta:
– La funzione ρv fissa v: infatti, ρv(v) = vvv = v.
– Definiamo x := cos(λ) + v sin(λ).
Notiamo che x ∈ S3 perche ha modulo quadro uguale ad 1:
(cos(λ) + v sin(λ)) · cos(λ) + v sin(λ) =
= (cos(λ) + v sin(λ)) · (cos(λ)− v sin(λ)) =
= cos2(λ)− v2 sin2(λ) = cos2(λ) + |v|2 sin2(λ) = 1
Inoltre, ρx fissa < v > punto per punto per l’osservazione precedente.
– ρx non e la rotazione di angolo λ che ci potremmo aspettare, ma non siamolontani dal risultato voluto: per capire come agisce ρx, scegliamo u ∈ S2 con< u, v >= 0, dove, in questo caso, le parentesi angolari indicano il prodottoscalare standard su H visto come spazio vettoriale reale di dimensione 4.
Definiamo poi w = v · u. Abbiamo in questo modo definito una base ortonor-male, in quanto:
1. |w| = |vu| = |v||u| = 1
2. w ⊥< u, v >R, come segue dalla formula per la moltiplicazione dei qua-ternioni dimostrata prima: si ha infatti < u, vu >=< u,− < u, v >+u ∧ v >=< u, u ∧ v >= 0 e similmente per < v, vu >.
E ora sufficiente calcolare
ρx(u) = xux = (cosλ+ v sinλ)u(cosλ− v sinλ)
= cos2 λu+ sin2 λv2u+ 2 cosλ sinλ(uv)(−1)
Notando ora che −uv = vu = w e v2 = −|v|2 = −1 l’espressione precedente siriscrive
(cos2 λ− sin2 λ)u+ sin(2λ)w
)=
cos(2λ)u+ sin(2λ)w
il che prova che ρx e una rotazione attorno al vettore v (in quanto lo lasciafisso) di angolo 2λ, visto come si comporta su u.
34

Questo conclude la nostra dimostrazione, poiche abbiamo mostrato che ogni rota-zione si scrive come ρx, scegliendo x nella forma mostrata sopra.
Osservazione 5.10. E’ inutile svolgere i calcoli di come ρx agisca su w, in quantosappiamo gia che si tratta di una rotazione, ed e quindi sufficiente controllare la suaazione su uno dei due elementi della base del piano ortogonale all’asse di rotazione.
Osservazione 5.11. Possiamo considerare la funzione x(λ) che, a v fissato, forni-sce il corrispondente valore di x. Era possibile prevedere che la dipendenza dell’an-golo di rotazione da λ non fosse l’identita notando che x(π) = −1 ⇒ ρx(π) = id, eche dunque il ‘periodo’ di ρx(λ) e un divisore di π.
5.1.5 Conclusione: caratterizzazione di SO(3)
Per concludere la caratterizzazione di SO(3) dimostriamo ora un importante risultato diteoria dei gruppi.
Teorema 5.12. Primo teorema d’isomorfismoSia ϕ : G→ H un omomorfismo surgettivo. Allora vale
G/ kerϕ ∼= Imϕ
Dimostrazione. Definiamo ψ : G/ kerϕ→ Imϕ come segue: ψ(g · kerϕ) = ϕ(g).Tale applicazione e ben definita, in quanto se g kerϕ = g′ kerϕ allora g−1g′ ∈ kerϕ, e
dunque ψ(g kerϕ) = ϕ(g) = ϕ(g)·eH = ϕ(g)·ϕ(g−1g′) = ϕ(gg−1g′) = ϕ(g′) = ψ(g′ kerϕ).Inoltre, essa e iniettiva, perche ψ(g kerϕ) = eH ⇔ ϕ(g) = eh ⇔ g ∈ kerϕ⇔ g kerϕ =
eG/ kerϕ, ossia il suo ker e banale.Infine, essa e automaticamente surgettiva per costruzione: se a ∈ Imϕ, allora esiste g
t.c. ϕ(g) = a e ψ(g kerϕ) = ϕ(g) = a.
Utilizziamo ora questo teorema unitamente ai fatti che abbiamo dimostrato: ker ρ =±1, ρ e surgettiva su SO(3). Per applicazione del primo teorema di isomorfismo otte-niamo allora
SO(3) = Imρ ∼= S3/ ±1 =q,−q |q ∈ S3
,
ossia e isomorfo alla sfera tridimensionale in cui i punti antipodali vengono identificati.Come ultima osservazione, facciamo notare, senza dimostrazione, che questo oggetto
e a sua volta isomorfo allo spazio proiettivo reale tridimensionale, PR3, cosı definito:
proiettivo Definizione 5.13. Sia V = K−spazio vettoriale.Definiamo P(V ) = V \ 0 /∼, in cui w ∼ v se w = λv per qualche λ ∈ K∗In particolare, PR3 = P(R4).
35

36

Capitolo 6
Sesta lezione (Angelo Vistoli,21/10/2009)
6.1 Basi
Dato un K-spazio vettoriale V ed un insieme qualsiasi I e data una funzione a : I → Kdefiniamo il suo supporto.
Definizione 6.1. Il supporto di a : I → K e l’insieme
Supp(a) = i ∈ I| a(i) 6= 0 .
Definizione 6.2.
KI := f : I → K
K(I) := f : I → K con Supp(f) finito .
Osservazione 6.3. KI e K(I) sono entrambi spazi vettoriali su K.
Consideriamo adesso una funzione e : I → V e poniamo per semplicita f(i) := fi perogni funzione di dominio I.
Definizione 6.4. e : I → V e una base se ogni v ∈ V e nella forma v =∑
i ai · ei perun’unica a ∈ K(I).
Teorema 6.5. Dato un K-spazio vettoriale W , e : I → V e una base se e solo se perogni f : I → W esiste un’unica funzione lineare f : V → W tale che f(ei) = f(i).
Dimostrazione. • (⇒): se e e una base e sufficiente notare che dato v =∑
i∈I ai·ei ∈ Vla funzione
f(v) =∑i∈I
ai · f(i)
e lineare e ben definita. Inoltre per linearita, fissato il valore di f sugli elementidella base il risultato precedente e l’unico ammissibile.
37

• (⇐): sia A = 〈ei|i ∈ I〉 lo spazio generato dagli ei, cioe l’insieme dei v =∑
i∈I ai · eicon a ∈ K(I), se A ( V sia v0 ∈ V \ A allora posso scegliere f : V → W in modoche f(ei) = f(i) ∀i mentre posso scegliere f(v0) uguale a 0 o a un vettore qualsiasiw0 ∈ W − 0, quindi f non e unica e siamo giunti ad un assurdo. Percio A = V .
Per mostrare che e e una base dobbiamo quindi mostrare solamente che∑
i∈I ai ·ei =0 implica a ≡ 0. Prendiamo i0 ∈ I e f tale che f(i0) = w1 ∈ W − 0 mentref(i) = 0 ∀i ∈ I − i0, allora
f(0) = f
(∑i∈I
ai · ei
)=∑i∈I
ai · f(i) = ai0w1 = 0
quindi ai0 = 0 e analogamente a(i) = 0 ∀i ∈ I.
Ma dato un insieme generico I esiste uno spazio vettoriale V ed una base e : I → V ?La risposta e banalmente sı poiche basta scegliere un campo K e allora K(I) e un talespazio vettoriale, infatti data
e : I → K(I) tale che e(i) = ei : I → K
ei(j) = 0 se j 6= i
ei(i) = 1
questa e una base poiche data f ∈ K(I) si ha
f =∑i∈I
f(i) · ei (f(i) 6= 0 per finiti i)
mentre ∑i∈I
ai · ei =∑i∈I
bi · ei ⇒∑i∈I
(ai − bi) · ei = 0.
Osserviamo che (a− b) ∈ K(I) banalmente, quindi
aj − bj =∑i∈I
(ai − bi) · ei(j) = 0 ∀j ∈ I
⇒ aj = bj ∀j.
Teorema 6.6. Se e : I → V e f : I → W sono basi allora ∃! ϕ : V → W isomorfismotale che ϕ(ei) = fi ∀i ∈ I.
Dimostrazione.∃! ϕ : V → W lineare t.c. ϕ(ei) = fi ∀i∃! ψ : V → W lineare t.c. ψ(fi) = ei ∀i⇒ ϕψ(fi) = fi ∀i e ψϕ(ei) = ei ∀i.
Ma ∃!τ : V → V lineare tale che ei 7→ ei ∀i, cioe l’identita. Quindi
ψϕ = IdV ⇒ ϕ e un isomosrfismo.
38

6.2 Quozienti di gruppi abeliani e quozienti di spazi
vettoriali
Dato un qualsiasi gruppo abeliano G consideriamo un suo sottogruppo H, introduciamoquindi i laterali di H:
Definizione 6.7. Un laterale di H in G e un insieme H+a = h+ a : h ∈ H dove a eun elemento di G. Indichiamo con G
Hl’insieme dei laterali di H in G, questo e il gruppo
quoziente di G ed H.
Il gruppo quoziente e effettivamente un gruppo se introduciamo l’operazione tralaterali
(H + a) + (H + b) = H + (a+ b).
Bisogna solo verificare che questa operazione sia ben definita, cioe se H + a = H + a′ eH+ b = H+ b′ allora H+ (a+ b) = H+ (a′+ b′), ma H+a = H+a′ significa a′−a ∈ H,cioe a′ = h+a e analogamente b′ = k+b con h, k ∈ H, percio (a′+b′)−(a+b) = h+k ∈ Hquindi H + (a+ b) = H + (a′ + b′).
Possiamo analogamente definire una quozientazione tra spazi vettoriali, dati infattiZ ⊆ V K-spazi vettoriali, consideriamoli come gruppi abeliani rispetto alla somma, sulgruppo quoziente V
Zintroduciamo una moltiplicazione in modo che
a · (Z + v) = Z + av ∀a ∈ K.
Si vede che anche in questo caso l’operazione e ben definita ed introduce sul quozienteuna struttura di spazio vettoriale, inoltre in questo modo la proiezione
π : V → V
Z
e lineare.Il quoziente di spazi vettoriali ci permette di “fattorizzare” una qualsiasi applicazione
lineare f : V → W ; sia infatti K ⊆ Ker(f) un sottospazio vettoriale di V , allora definendola proiezione canonica
π : V → V
K
e l’applicazione
f :V
K→ W, f(K + v) = f(v)
che e ben definita poiche f e costante sui laterali di K, abbiamo allora f = f π.Porto la kefiah per solidarieta al popolo palestinese, l’ho comprata viola perche si
intona ai lacci delle mie Vans.Parla anche tu con Il supergiovane di lettere e filosofia Crea il tuo Parla con. . . Questo risultato e partico-
larmente rilevante all’inter-no della teoria delle potenzeesterne.
6.3 Esistenza della potenza esterna
Teorema 6.8. Se V e un K-spazio vettoriale, dato k ∈ Z+ esiste una potenza esternaΛkV .
39

Dimostrazione. Sia F uno spazio vettoriale con una base e : V k → F (esiste per unteorema precedente), sia ora W un K-spazio vettoriale e h : V k → W multilinearealternante. Allora
∃! ϕ : F → W t.c. ϕev = h(v).
Adesso dati v, v′, v′′ ∈ V k tali che
v′ = (v1, . . . , vi−1, v′i, . . . , vk)
v′′ = (v1, . . . , vi−1, v′′i , . . . , vk)
v = (v1, . . . , vi−1, av′i + bv′′i , . . . , vk) .
Questo implica
h(v) = ah(v′) + bh(v′′) ⇔ ϕ(ev) = aϕ(ev′) + bϕ(ev′′)
cioeϕ (ev − aev′ − bev′′) = 0 (6.1) eq:condizione-multilinearita
Se invece v = (v1, . . . , vi, . . . , vj, . . . ) e v′ = (v1, . . . , vj, . . . , vi, . . . ) allora
h(v) + h(v′) = 0 ⇔ ϕ (ev + ev′) = 0 (6.2) eq:condizione-alternanza
Quindi la (eq:condizione-multilinearita6.1) e la (
eq:condizione-alternanza6.2) sono necessarie e sufficienti per la linearita e l’alternanza di h.
Sia Z ⊆ F lo spazio vettoriale generato dai vettori nella forma ev− aev′ − bev′′ (vettori ditipo 1) e da vettori nella forma ev − ev′ (vettori di tipo 2), per quanto detto Z ⊆ Ker(ϕ)pertanto esiste una fattorizzazione di ϕ che si ottiene introducendo
h :F
Z→ W, h(Z + k) = ϕ(k)
cosicche ϕ = h π. A questo punto abbiamo che
π e : V k → F
Z
e k-lineare ed alternante pertanto FZ
e proprio la potenza esterna che cercavamo:
ΛkV =F
Z.
40

Capitolo 7
Settima lezione (Filippo Callegaro,27/10/2009)
7.1 Altro modo di vedere SO3
Abbiamo visto l’altra volta che SO3∼= PR3 ∼= S3
∼ , dove ∼ e una relazione di equivalenzache ha per classi le coppie di punti opposti della sfera. Ora cerchiamo un altro modo divisualizzare questo gruppo. Vorremmo dimostrare che ∼= S3
∼∼= B3
' , dove ' e una relazionedi equivalenza che identifica i punti antipodali della frontiera. Si nota che questo non epiu un isomorfismo di gruppi, ma un omeomorfismo dal punto di vista topologico.
Quello che stiamo cercando di dire e che una rotazione dello spazio puo essere rappre-sentata da un vettore v di norma minore o uguale a 1, di angolo π · ‖v‖ e asse v. Inoltre,due rotazioni di ±π e stesso asse sono equivalenti, quindi i punti opposti di B3 devonoessere identificati dalla relazione di equivalenza '.
7.1.1 Calcolo dell’omeomorfismo
Per iniziare, facciamo questa identificazione su S1
∼ e B1
' , per poi passare al caso generale.Data la sfera unitaria in R2, cioe la circonferenza di raggio 1, posso scegliere un diametro(isomorfo a B1) e proiettarvi una delle due semisfere. Dato che i punti opposti dellasfera sono identificati dalla relazione di equivalenza ', questa funzione e “quasi” bendefinita e manda S1
∼ in B1. Il “quasi” e dovuto al fatto che i punti opposti del diametrosono identificati da ∼, ma vengono mandati in due punti diversi. Per questo e necessarial’identificazione di questi due punti, e la funzione cosı definita e chiaramente bigettiva.Inoltre, dato che si tratta di una proiezione, e anche continua.
Il caso di B3 e equivalente, con la differenza che si lavora con la sfera unitaria in R4
e non in R2 e di conseguenza con B3 e non B1.
7.1.2 Gruppi topologici
Abbiamo visto che, per visualizzare SO(3) si puo usare un isomorfismo con il pianoproiettivo PR3, e in SO(3) e stata definita una topologia. In generale, si puo definire ungruppo topologico nel modo seguente:
41

Definizione 7.1. Sia (G,·) gruppo. Allora G e topologico se sull’insieme di definizioneesiste una topologia tale che:
• La funzione · e continua;
• La funzione f(g) = g−1 e continua.
Esercizio 7.2. Sia G gruppo topologico connesso, Ue un intorno dell’elemento neutro.Allora 〈Ue〉 = u1u2 . . . un | n ∈ N, ui ∈ Ue ∀i = G.
7.2 Prodotti hermitiani
Vogliamo ora estendere i concetti di prodotti scalari al caso di C-spazi vettoriali e perquesto introduciamo una nuova classe di operatori, detti prodotti hermitiani.
Definizione 7.3. Sia V un C-spazio vettoriale, b : V ×V → C e prodotto hermitiano se:
• b(hv, kw) = hkb(v, w) ∀h, k ∈ C;
• b(v, w) = b(w, v).
Esempio 7.4. Il prodotto hermitiano standard su Cn e:
b(z, w)st =n∑i=1
ziwi.
La forma hermitiana associata ad un prodotto hermitiano e la funzione b : V → C chemanda v in b(v, v). Pur essendo una funzione diversa dal prodotto stesso, la indichiamocon la stessa lettera senza rischio di ambiguita, dal momento che i due simboli hanno undiverso numero di argomenti.
Osserviamo che in realta una forma hermitiana assume solo valori reali, in quanto:
b(z, z) = b(z, z).
In tabellatbl:confronto-scalari-hermitiani7.1 sono schematizzate alcune tra le principali differenze tra i prodotti
scalari ed i prodotti hermitiani.
7.2.1 Matrici unitarie
Tra le matrici in R, rivestono particolare importanza quelle che conservano i prodottiscalari, ovvero le matrici ortogonali. Analogamente, su uno spazio vettoriale complesso sidistinguono le matrici unitarie, che costituiscono il gruppo:
U(n) = A ∈Mn(C) | (Av,Aw) = (v, w) ∀v, w ∈ Cn.
Osserviamo che data una matrice quadrata A a valori complessi di dimensione n,A ∈ U(n) se e solo se A∗ = A−1. Da questa relazione si deduce che il modulo deldeterminante di matrici unitarie e sempre 1.
42

Tab
ella
7.1:
Con
fron
totr
aal
cuni
asp
etti
del
lefo
rme
bilin
eari
sim
met
rich
ee
del
lefo
rme
her
mit
iane
tbl:confronto-scalari-hermitiani
Pro
dott
isc
ala
riP
rodott
ihem
itia
ni
VeR
-spaz
iove
ttor
iale
VeC
-spaz
iove
ttor
iale
b(v,w
)=b(w,v
)b(v,w
)=b(w,v
)
beR
-bilin
eare
b(hv,kw
)=hkb(v,w
)
∀b∃A∈M
(R)
:b(v,w
)=vTAw
∀b∃A∈M
(C)
:b(v,w
)=vTAw
b(λv)
=λ
2b(v)
(con
b(v)
def =b(v,v
)la
form
aquad
rati
caas
soci
ata
alpro
dot
to)
b(λv)
=|λ|2 b
(v)
(con
b(v)
def =
b(v,v
)la
form
aher
mit
iana
asso
ciat
aal
pro
dot
to)
Una
form
aquad
rati
cae
asso
ciat
aa
un
pro
dot
tosc
alar
ese
eso
lose∀v,w∈V,k∈R
:
•b(v
+w
)+b(v−w
)=
2(b(v)
+b(w
));
•b(kv
+w
)−b(kv−w
)=k(b
(v+w
)−b(v−w
)).
Una
form
aher
mit
iana
eas
soci
ata
adun
pro
dot
toher
mit
ia-
no
see
solo
seva
lgon
ole
condiz
ioni
pos
tep
eril
caso
real
e(c
onk∈C
)eb(v)∈R∀v
.
Inta
lca
so:
•b(v,w
)=
1 4[b
(v+w
)−b(v−w
)].
Inta
lca
so:
•<b(v,w
)=
1 2[b
(v+w
)−b(v)−b(w
)];
•=b(v,w
)=
1 2i[b
(iv
+w
)−b(v)−b(w
)].
Una
bas
epu
oes
sere
orto
nor
mal
izza
tatr
amit
eil
pro
cess
odi
Gra
ham
-Sch
imdt
etr
amit
enor
mal
izza
zion
e.U
na
bas
epu
oes
sere
orto
nor
mal
izza
tatr
amit
eil
pro
cess
odi
Gra
ham
-Sch
imdt
etr
amit
enor
mal
izza
zion
e.
43

7.2.2 Matrici unitarie speciali
Ora cerchiamo le matrici del gruppo speciale unitario SU(n), ovvero le matrici complesseunitarie con determinante 1.
Il caso n = 1 e piuttosto banale: l’unica matrice con determinante 1 e chiaramente lamatrice 1.
Consideriamo ora una matrice complessa di dimensione 2:
(a bc d
). Sappiamo che
il suo determinante deve essere uno e che le colonne devono essere di norma unitaria eortogonali tra di loro. Possiamo sintetizzare queste relazioni nelle formule:
ad− bc = 1 (7.1)
|a|2 + |c|2 = 1 (7.2)
|b|2 + |d|2 = 1 (7.3)
ab+ cd = 0. (7.4)
Si puo dunque vedere che:
0 = ab+ cd = abd+ cdd = abd+ c|d|2 =
= b(1 + bc) + c|d|2 = b+ |b|2c+ |d|2c =
= b+ c.
Risulta quindi c = −b e, sostituendo nella (eq:sn2-ortogonalita7.4), cd− ac = 0. Se c 6= 0, questo implica
d = a. Se c = 0 tale condizione e comunque verificata, perche |a|2 = 1 e ad = 1.La generica forma della matrice unitaria di ordine 2 e, dunque,(
a b
−b a
)a, b ∈ C.
(non e difficile verificare che ciascuna di queste matrici e unitaria e ha determinante 1).
7.2.3 Nuovamente i quaternioni
Forti di questo risultato, possiamo rivedere quello che avevamo dimostrato nella sezionesubs:quaternioni-sottoanello2.2.1, ossia che il corpo dei quaternioni e isomorfo ad un sottoanello di matrici complessedi ordine 2.
Sia q ∈ H un quaternione, scomposto nelle componenti q = a+ ib+ jc+kd. Possiamo
allora vederlo come un vettore complesso
(a+ ibc+ id
)=
(ab
)e mandarlo nella matrice
appena vista A =
(a b
−b a
).
Questa mappa e sostanzialmente identica (a parte un cambio di segno, ben pocoimportante) a quella gia vista nella sezione
subs:quaternioni-sottoanello2.2.1. Sappiamo, dunque, che essa mantiene
i prodotti e |a|2 + |b|2 = detA = 1⇔ |q| = 1.Il gruppo delle matrici speciali unitarie e dunque isomorfo al gruppo dei quaternioni
unitari (considerato, ovviamente, rispetto al prodotto).
44
Capitolo 8
Ottava lezione (Angelo Vistoli,28/10/2009)
8.1 Base di una potenza esterna
Prendiamo uno spazio vettoriale V su K, e k appartenente a N. Vogliamo trovare unabase della relativa potenza esterna ΛkV . Siccome il prodotto esterno associa a (v1, . . . , vk)l’elemento v1 ∧ · · · ∧ vk, segue che ΛkV e generato da v1 ∧ · · · ∧ vk: se cosı non fosse,la fattorizzazione data dalla proprieta universale non sarebbe unica, perche potrebbeassumere valori qualsiasi su vettori non generati da v1 ∧ · · · ∧ vk.
Teorema 8.1. Poniamo che e1, . . . , ek sia una base di V . Allora ΛkV e di dimensionefinita.
Dimostrazione. Prendiamo l’insieme ei1 ∧ · · · ∧ eik | 1 ≤ i1, . . . , ik ≤ n e dimostriamoche i suoi elementi generano ΛkV : siccome sono un numero finito, ne seguira che ancheΛkV sara di dimesione finita. Per fare cio e sufficiente dimostrare che ciascun v1∧ · · ·∧ vke combinazione lineare degli ei1 ∧ · · · ∧ eik . Sappiamo che vj =
∑1≤i≤n aijei. Ne segue
quindi che possiamo scrivere v1 ∧ · · · ∧ vk come:
v1 ∧ · · · ∧ vk =∑i1
ai11ei1 ∧ · · · ∧∑ik
aikkeik
che raccogliendo le sommatorie diventa:
v1 ∧ · · · ∧ vk =∑i1,...,ik
?ei1 ∧ · · · ∧ eik
dove ? rappresenta uno scalare di poca importanza.
Osservazione 8.2. Notiamo che molti dei vettori che generano ΛkV sono evidentementedipendenti. Ad esempio ei1 ∧ · · · ∧ eik = 0 se ia = ib per qualche a 6= b. Inoltre (ei1 ∧ · · · ∧eil ∧ · · · ∧ eim ∧ · · · ∧ eik) = −(ei1 ∧ · · · ∧ eim ∧ · · · ∧ eil ∧ · · · ∧ eik) dunque (ei1 ∧ · · · ∧ eil ∧· · · ∧ eim ∧ · · · ∧ eik) e (ei1 ∧ · · · ∧ eim ∧ · · · ∧ eil ∧ · · · ∧ eik) sono dipendenti. Ne segue cheΛkV e generato da ei1 ∧ · · · ∧ eik | 1 ≤ i1 < · · · < ik ≤ n
45

Osservazione 8.3. Se k > n = dimV , ΛkV = 0 e ogni h : ΛkV → W k-linearealternante e 0.
Teorema 8.4. ei1 ∧ · · · ∧ eik | 1 ≤ i1 < · · · < ik ≤ n e una base di ΛkV .thm:base-potenza-esterna
Osservazione 8.5. ΛkV = 0 se e solo se k > n
Osservazione 8.6. Due basi di ΛkV sono equipotenti e dim ΛkV =
(nk
)Osservazione 8.7. In generale, considerato un K-spazio vettoriale W , si dice che S ⊆ We un insieme di elementi indipendenti se, per ogni s ∈ S e possibile trovare un funzionalehs : W → K tale che
hs(s) = 1
hs(t) = 0 ∀t 6= s.
Dimostrazione. Poiche ho gia dimostrato che l’insieme proposto genera ΛkV , mi rimanesoltanto da provare che i suoi elementi sono indipendenti.
Siano i1, . . . , ik indici interi tali che 1 ≤ i1 < i2 < · · · < ik ≤ n. Devo mostrare cheesiste ϕi1,...,ik : ΛkV → K tale che:
ϕi1,...,ik(ej1 ∧ · · · ∧ ejk) =
0 se (i1, . . . , ik) 6= (j1, . . . , jk)
1 se (i1, . . . , ik) = (j1, . . . , jk).
Per dimostrare cio, e sufficiente trovare hi1,...,ik : V k → K k-lineare alternante tale che,per ogni (j1, . . . , jk) con 1 ≤ i1 < · · · < ik ≤ n,
hi1,...,ik(ej1 , . . . , ejk) =
0 se (j1, . . . , jk) 6= (i1, . . . , ik)
1 se (j1, . . . , jk) = (i1, . . . , ik).
I prossimi paragrafi saranno dedicati a trovare questa funzione hi1,...,ik , tramite laquale, invocando la proprieta universale della potenza esterna, possiamo ottenere ϕi1,...,ik .
8.1.1 Ricerca dell’applicazione multilineare
In generale a partire da una applicazione h : V k → W k-multilineare si puo ottenereun’applicazione h k-multilineare alternante che conserva alcune delle proprieta della h. Ilcaso k = 2 ci fornisce un facile esempio. Data h : V 2 → W la h : V 2 → W cosı definita:
h(v1, v2) = h(v1, v2)− h(v2, v1)
e multilineare alternante.Generalizziamo questa procedura per k generico. Sia Sk = insieme delle permutazioni
di 1, 2, . . . , k gruppo di k! elementi. Esiste un’applicazione chiamata segno:
sgn : Sk → ±1
tale che sgn(σ) = −1 se σ e una trasposizione e sgn(στ) = sgn(σ) sgn(τ) per tutti i σ, τin Sk. Definiamo la scrittura σh, dove h e un’applicazione multilineare.
46

Definizione 8.8.σh(v1, . . . , vk) = h(vσ(1), . . . , vσ(k))
Dalla definizione deduciamo che h e alternante se σh = sgn(σ)h. Inoltre la precedentescrittura e associativa, infatti:
σ(τh)(v1, . . . , vk) = τh(vσ(1), . . . , vσ(k)) = h((vσ(τ(1)), . . . , vσ(τ(k))) = (σ(τ(h)))(v1, . . . , vk)
A questo punto definiamo h
Definizione 8.9. h : V k → W :
h =∑σ∈Sk
sgn(σ)σh
Osservazione 8.10. h e K-lineare alternante.
Dimostrazione.σh = σ(
∑τ∈Sk
sgn(τ)τh)
che applicando σ ad ogni termine della sommatoria diventa:∑τ∈Sk
sgn(τ)σ(τh) =∑τ∈Sk
sgn(τ)(στ)h
Operando il cambio di variabile ρ = στ :∑τ∈Sk
sgn(τ)(στ)h =∑ρ∈Sk
sgn(σ−1ρ)ρh
Poiche la variabile τ gira su tutte le permutazioni di Sk, fissato σ anche ρ gira su tuttele permutazioni di Sk. Possiamo dunque sostituire l’indice ρ con τ e ottenere:
σh =∑τ∈Sk
sgn(σ−1) sgn(τ)τh = sgn(σ)∑τ∈Sk
sgn(τ)τh = sgn(σ)h
che prova l’alternanza di h.
8.1.2 Costruzione di hi1,...,ik
Si vuole ora determinare hi1,...,ikK-lineare alternante tale che:
hi1,...,ik(ej1 , . . . , ejk) =
0 (i1, . . . , ik) 6= (j1, . . . , jk)1 (i1, . . . , ik) = (j1, . . . , jk)
Osservazione 8.11. Nel caso k = 1 ∃!εi : V → K lineare tale che εi(ej) = δij, poiche gliej formano una base di V .
Definizione 8.12. Costruisco li1,..,ik : V k → K tale che:
li1,..,ik(ej1 , .., ejk) = εi1(ej1) . . . εik(ejk)
47

Per costruzione li1,..,ik e multilineare e vale:
li1,...,ik(ej1 , . . . , ejk) =
0 (i1, . . . , ik) 6= (j1, . . . , jk)1 (i1, . . . , ik) = (j1, . . . , jk)
Lemma 8.13. Siano i1 < · · · < ik. Allora hi1,...,ik = li1,...,ik e la funzione cercata.
Dimostrazione. Siano j1 < · · · < jk. Allora:
hi1,...,ik(ej1 , . . . , ejk) =∑σ∈Sk
li1,...,ik(ejσ(1), . . . , ejσ(k)
).
Supponiamo che (i1, . . . , ik) 6= (j1, . . . , jk): in questo caso tutti i termini della som-matoria sono nulli, perche nessuna permutazione del multiindice (i1, . . . , ik) e uguale a
(j1, . . . , jk). Dunque, come richiesto, h assume valore nullo.Al contrario, se (i1, . . . , ik) = (j1, . . . , jk) l’addendo della sommatoria relativo alla
permutazione identica vale, banalmente, 1, mentre tutti gli altri continuano ad esserenulli, perche il multiindice (i1, . . . , ik) viene permutato in modo non banale e, dunque,
risulta diverso da (j1, . . . , jk). Dunque, come richiesto, h assume valore 1.
Questo risultato ci permette dunque di concludere la dimostrazione del teorema (thm:base-potenza-esterna8.4).
48
Capitolo 9
Nona lezione (Filippo Callegaro,3/11/2009)
9.1 SU(2) e S3
Vediamo un altro simpatico risvolto del fatto che SU(2) e S3 siano isomorfi: vogliamomandare SU(2)→ GL(3,R) per far questo creeremo un apposito spazio che chiameremoV isomorfo a R3 cioe quello delle matrici quadrate di ordine 2 a coefficienti in C contraccia nulla e tali per cui ∀H ∈ V , H = −H∗ questo e un sottospazio reale di M2(C)visto come spazio vettoriale di dimensione 8 su R le matrici di V saranno infatti dellaforma (
ix y + iz−y + iz −ix
).
Mandiamo un generico A ∈ SU(2) in ρA ∈ Aut(V ) che agisce in questo modo:ρA(H) = A−1HA. Dimostriamo ora che H ∈ V ⇒ A−1HA ∈ V ; innanzitutto notia-mo che questa e una matrice a coefficienti in C e che ha traccia nulla, poiche il coniugioconserva la traccia. Dimostriamo ora che vale anche la terza proprieta, ricordando cheA∗ = A−1 e quindi (A−1HA)∗ = A∗H∗(A−1)∗ = A−1(−H)(A∗)∗ = −A−1HA CVD.
dimostriamo che quest’applicazione e un omomorfismo, siano A,B ∈ SU(2)
• ρe(H) = IHI−1 = H e l’automorfismo identicoe va bene
• ρAB(H) = ABH(AB)−1 = A(BHB−1)A−1 = ρA · ρB(H).
• ρA · ρA−1(H) = A−1AHA−1A = H = ρe(H)∀H ∈ V
Ora, l’immagine di ρ e contenuta in O(3) con la norma di una matrice appartenente aV definita come il suo determinante, che guardacaso coincide con x2 + y2 + z2 siccome ilconiugio conserva il determinante e poiche SU(2) e connesso anche la sua immagine deveesserlo e quindi deve essere contenuto in SO(3). Ora chi e il ker(ρ)? Si puo notare che sitratta dell’insieme A ∈ SU(2) | AH = HA∀H ∈ V per esercizio si puo dimostrare chequesto insieme e composto da due soli elementi: l’identita e la sua opposta.
A questo punto ci ricordiamo che esiste un’altro omomorfismo da un gruppo in SO(3)con ker composto da soli due elementi: quello che lo collega a S3 come sottogruppo
49

dei quaternioni! ma sono anche isomorfi SU(2) e S3, uhuhuh, facciamo un simpaticoschemetto:
H > S3 ∼- SU(2)
SO(3)
π
?
ρ
9.2 sottogruppi finiti di O(2)
Sezione provvissoriacominciamo con alcuni isomorfismi: abbiamo gia dimostrato come O(2) sia isomorfo a
S1 come sottogruppo moltiplicativo dei complessi semidiretto Z2. dovremo quindi trovarei sottogruppi finiti di S1 e per ognuno di questi ne avremo trovati due di SO(3): lui stessoe lui semidiretto Z2,vedremo poi cosa rappresentino. Ora, notiamo che un elemento diS1 si puo scrivere come e2πiθ facciamo quindi un omomorfismo iniettivo f da R comegruppo additivo in S1 che mandi θ, indovinate un po’, in e2πiθ evidentemente il ker erappresentato da Z. quindi se G < S1 Z < f−1(G) < R siccome non possono essercisottogruppi infiniti, ogni elemento sommato a se stesso un numero finito di volte devedare un intero, questo equivale a dire che sono tutti razionali, siccome deve conteneretutto Z se contiene p/q conterra anche 1/q mentre se contiene 1/m e 1/n dovra contenereanche 1/mn per motivi aritmetici. Da tutto qeusto possiamo dedurre che il f−1(G) none altro che 1/nZ. G e quindi l’insieme delle rotazioni di un angolo multiplo razionaledi 2π moltiplicarlo o meno per Z2 equivale ad aggiungere delle riflessioni rispetto adassi che distino un multiplo intero di quell’angolo, altrimenti componendo la riflessionela rotazione e di nuovo la riflessine otterremo un’altra rotazione non generata da quellaoriginale.
9.3 Varie sui gruppi
Definizione 9.1. dato un gruppo G e un suo sottogruppo H l’indice i di H in G e ilnumero dei laterali destri di H in G e si scrive [G : H] = i
Teorema 9.2. Sia G un gruppo e sia H < G tale per cui [G : H] = 2 allora H / G
Dimostrazione. Sia a /∈ H il laterale sinistro Ha, evidentemente Ha ∩ H = ∅ poniamoper assurdo che esista un h tale per cui ha stia in H ha ∈ H ⇒ h−1 · ha ∈ H ⇒ a ∈ Hassurdo. Quindi Ha ⊆ aH poiche i laterali destri formano una partizione, analogamenteaH ⊆ Ha per simmetria (i laterali sinistri formano una partizione quanto i laterali destri)da cio Ha = aH.
in questa sezione ci occuperemo ora di gruppi finiti, cioe gruppi con un numero finitodi elementi
50

Definizione 9.3. Un gruppo finito G si dice ciclico se ammette un generatore x ∈ G taleper cui ∀ g ∈ G ∃ n ∈ N | g = xn dove xn e x composto se stesso n volte con l’operazionedi gruppo. Si puo scrivere anche G =< x >, e si dice che G e il gruppo generato da x
Definizione 9.4. Sia G un gruppo, si definisce l’ordine di G come la sua cardinalita esi scrive o(G)
Definizione 9.5. sia g un elemento di un gruppo, o(g) = | < g > | va da se che l’ordinedi un gruppo ciclico e uguale a quello del suo generatore.
i gruppi ciclici hanno moltissime interessanti proprieta, ne elencheremo alcune sottoforma di osservazioni e teoremi di cui pero non daremo dimostrazione fondamentalmenteperche non richiesta, a volte abbastanza coomplicata, altre volte solo una lunga serie diverifiche.
Osservazione 9.6. anche idG = xm per un qualche m ∈ N per di piu m = |G|
Teorema 9.7. Siano G,H gruppi ciclici tali che |G| = |H| allora G ∼= H
Osservazione 9.8. in generale il prodotto di gruppi ciclici non e detto che sia ciclico,ad esempio anche qualora G fosse ciclico G × G non lo e di certo (a meno che G nonfosse il gruppo banale costituito dal solo elemento neutro).
Osservazione 9.9. se o(G) e finito allora ∀g ∈ G o(g) e finito, infatti < g > e unsottogruppo di G.
ora potremmo cominciare a farci alcune interessanti domande tipo ‘quando il prordottodi gruppi cioclici e ciclico? Ma le lasceremo per esercizio
Esercizio 9.10. quando il prodotto diretto di gruppi ciclici e ciclico?
Osservazione 9.11. ogni gruppo ciclico e commutataivo, infatti ogni elemento puo eserescritto come xn per un qualche n ∈ N e xn · xm = xm+n = x(n+m) = xm · xn questo perla prorpieta commutativa della normale addizione tra i naturali.
Teorema 9.12. Ogni gruppo abeliano e prodotto diretto di gruppi ciclici
Definizione 9.13. Cn e un rappresentante canonico dei gruppi ciclici con n elementi,tanto sono tutti isomorfi. notare che Cn ∼= Z/nZ
Ora e lecito chiedersi se tutti i gruppi siano abeliani, ma ovviamente no, abbiamo giavisto come Sn non lo sia, ma vediamo un altro esempio: il gruppo diedrale
Definizione 9.14. Sia α ∈ Aut(Gn) tale per cui α(a) = a−1, il gruppo diedrale Dn =Cn o C2 puo anche essere visto come il gruppo delle isometrie di un piano che lascinoinvariato un poligono di n lati centrato nell’origine.
Teorema 9.15. H < G⇒ o(H)|o(G)
Dimostrazione. le classi laterali destre di H sono una partizione di G e hanno tutte lastessa cardinalita.
51

Osservazione 9.16. Sia G un gruppo e H < G allora esiste un omomorfismo banaleϕ : G→ S(G/H) che manda g ∈ G in una permutazione delle classi laterali destre di Hin G che consiste nella semplice moltiplicazione a destra per g.
Ora introdurremo un altro importante concetto; vorremo in qualche modo formalizzarequello che facciamo quando usiamo i gruppi per trasformare degli insieme senza unaprecisa struttura ma in modo da sfruttare le fantastiche prorprieta dei gruppi; come adesempio quando usiamo Sn per permutare gli elementi di un insieme finito. Chiamiamoquesto azione di gruppo
Definizione 9.17. Un G un gruppo e X un insieme si definisce un’azione di G su Xuna funzione da G nelle funzioni da X in X tale che manda g in ϕg (ma solitamenteϕg(x) si scrive semplicemente g · x o addirittura gx), con le seguenti proprieta:
• idG · x = x∀x ∈ X
• g′ · (g · x) = (g′g) · x∀g, g′ ∈ G∀x ∈ X
Definizione 9.18. Data un’azione di un gruppo G su un insieme X e un elemento x ∈ Xsi dice orbita di x secondo quell’azione l’insieme y ∈ X|∃g ∈ G|y = g ·x e si scrive Ox.
Osservazione 9.19. e facile notare che y ∈ Ox ⇒ Oy = Ox, che x ∈ Ox∀x ∈ X e chequindi le orbite formano una partizione di X
Definizione 9.20. Un’azione di G in X si dice transitiva se esiste un’unica orbita in X
Definizione 9.21. Data un’azione da un gruppo G in un insieme X e x ∈ X si definiscelo stabilizzatore di x come l’insieme Stab(x) = g ∈ G|gx = x a volte si scrive ancheGx
Osservazione 9.22. Gx < G
Teorema 9.23. Sia G un gruppo che agisce su X e x ∈ X H = stab(x) esiste unafunzione bigettiva ‘ naturale’ f tra Ox e G/H che manda aH in ax con a ∈ G
Dimostrazione. Dimostriamo innanzitutto che questa funzione f e ben definita, cioe chemanda tutti gli elementi di una classe laterale nella stessa orbita, ora se f(aH) = axprendiamo b ∈ aH, bH = aH ma se b ∈ aH esiste un h ∈ H | b = ah per definizionedi aH quindi f(bH) = f(ahH) = ahx = ax poiche h appartiene allo stabilizzatore di x,questa funzione e evidentemente surgettiva, dimostriamo l’iniettivita. se f(aH) = f(bH)vuol dire che ax = bx agiamo con b−1 su entrambi questi elementi di X otteniamo che(b−1a)x = x cio vuol dire che (b−1a) appartiene allo stabilizzatore di x, che e H, quindia = b(b−1a) = bh per un h ∈ H, quindi b ∈ aH quindi bH = aH.
Esercizio 9.24. • dimostrare che o(ab) = o(ba)
• Quali gruppi non hanno sottogruppi propri?
• Sia G un gruppo tale per cui ∀g ∈ Ggg = idG dimostrare che G e abeliano
• sia H ⊃ Q8 = ±1,±i,±j,±k, trovare i sottogruppi normali e il gruppo degliautomorfismi.
52

Capitolo 10
Decima lezione (Angelo Vistoli,04/11/2009)
10.1 Richiami e notazioni
Nota: per tutta la lezione, consideriamo V e W due spazi vettoriali di dimensione finita,n ed m rispettivamente, e k un intero maggiore di zero.
Avevamo messo in corrispondenza V k e ΛkV tramite la
V k → ΛkV
(v1, . . . , vk)→ (v1 ∧ · · · ∧ vk)Se e1, . . . , en costituiscono una base di V , possiamo considerare una successione I =
(i1, . . . , ik), con 1 ≤ i1 < · · · < ik ≤ n. Ponendo ora eI = ei1 ∧ · · · ∧ eik , abbiamo unamappa
I → ΛkV
I → eI
Per quanto dimostrato le scorse lezioni, si vede immediatamente che ΛkV = 0⇔ k >n. Infatti se k > n non posso costruire nessun elemento tramite successioni crescenti deltipo descritto sopra, e quindi ho una base vuota, da cui uno spazio banale 0, mentre seviceversa k ≤ n posso di certo costruire almeno una successione crescente (considerandoad esempio i primi k vettori della base).
Un’altra osservazione e che dim ΛkV =(nk
), ossia il numero di modi in cui posso
scegliere k vettori sugli n della base di V per formare gli elementi della base di ΛkV .
10.2 Funzioni e determinanti
Notiamo innanzitutto che se ho una funzione f : V → W lineare, posso costruirne unak-lineare alternante da V k a ΛkW . Consideriamo infatti
V k −→ W k −→ ΛkW
(v1, . . . , vk)→ (f(v1), . . . , f(vk))→ (f(v1) ∧ · · · ∧ f(vk))
Abbiamo la seguente
53

Proposizione 10.1. Esiste un’unica funzione lineare Λkf : ΛkV → ΛkW tale cheΛkf(v1 ∧ · · · ∧ vk) = (f(v1) ∧ · · · ∧ f(vk))
Dimostrazione. Utilizzo la proprieta universale delle potenze esterne e la funzione k-lineare ed alternante da V k in ΛkW sopra definita.
Sia ora V uno spazio vettoriale di dimensione 1 e sia f una funzione lineare da V inV . Esiste uno scalare a tale che f(v) = av,∀v ∈ V . Chiamiamo questo a il determinantedell’applicazione f .
Notiamo subito che se abbiamo anche una seconda funzione g : V → V e consideriamo
la composizione fg : V → V , abbiamo Vg→ V
f→ V e il determinate di fg e il prodottodei determinanti di f e g.
Vogliamo ora estendere tutto cio a spazi di dimensione maggiore di 1. Diamo quindila seguente
Definizione 10.2. Il determinante di una funzione f : V → V e il determinate di Λnf .
Notiamo che dim ΛnV =(nn
)= 1, dunque questa definizione si riconduce ad un
determinante noto, dato che Λnf e definita su uno spazio di dimensione 1.
Proposizione 10.3. Siano f : V → W , g : W → Z due funzioni lineari. Allora Λk(gf) =Λkg Λkf .
Dimostrazione. Innanzitutto, abbiamo che gf : V → Z, Λkf : ΛkV → ΛkW e Λkg :ΛkW → ΛkZ.
Ora, Λkg Λkf(v1 ∧ · · · ∧ vk) = Λkg(f(v1) ∧ · · · ∧ f(vk)) = gf(v1) ∧ · · · ∧ gf(vk) =Λk(gf)(v1 ∧ · · · ∧ vk). Concludiamo che Λk(gf) = Λkg Λkf , grazie all’unicita garantitadalla proposizione precedente.
Teorema 10.4 (di Binet). Se f, g : V → V sono lineari, allora
det(fg) = det f · det g.
Dimostrazione. Λn(fg) = Λnf Λng per la proposizione precedente. Dato che ora siamoin dimensione 1, possiamo concludere che det(fg) = det f · det g.
10.2.1 Confronto con la precedente definizionesubs:confronto-determinanti
Sia e1, . . . , en una base di V ed f : V → V una funzione lineare. Se questa funzione erappresentata da una matrice A = (aij) ∈ Mn(K), sappiamo che f(ej) =
∑ni=1 aijei.
Inoltre abbiamo detto che ΛnV ha dimensione 1 e possiamo quindi prendere e1 ∧ · · · ∧ encome base.
Abbiamo cosı(Λnf)(e1 ∧ · · · ∧ en) = det(f)(e1 ∧ · · · ∧ en)
Esempio 10.5. Consideriamo il caso n = 2. Abbiamo
(Λ2f)(e1 ∧ e2) = f(e1) ∧ f(e2) =
= (a11e1 + a21e2) ∧ (a12e1 + a22e2) =
= a11a21(e1 ∧ e1) + a11a22(e1 ∧ e2) +
+ a21a12(e2 ∧ e1) + a21a22(e2 ∧ e2) =
= (a11a22 − a21a12)(e1 ∧ e2)
54

Vediamo ora il caso generale:
(Λnf)(e1 ∧ · · · ∧ en) = f(e1) ∧ · · · ∧ f(en) =
=
(∑i1
ai1,1ei1
)∧ · · · ∧
(∑in
ain,nein
)=
=∑i1,...,in
ai1,1 . . . ain,n(ei1 ∧ · · · ∧ ein)
Di queste dobbiamo considerare solo le successioni ei1 ∧ · · · ∧ ein senza ripetizioni (ineffetti, se ij = ij′ per j 6= j′, risulta che ei1 ∧ · · · ∧ ein = 0), ossia, in questo caso, tutte lepermutazioni dell’insieme 1, . . . , n:
(Λnf)(e1 ∧ · · · ∧ en) =∑σ∈Sn
aσ(1),1 . . . aσ(n),n(eσ(1) ∧ · · · ∧ eσ(n)).
Dato che (v1, . . . , vn)→ v1 ∧ · · · ∧ vn e alternante, abbiamo
eσ(1) ∧ · · · ∧ eσ(n) = sgn(σ)(e1 ∧ · · · ∧ en),
dunque:
(Λnf)(e1 ∧ · · · ∧ en) =∑σ∈Sn
sgn(σ)aσ(1),1 . . . aσ(n),n(e1 ∧ · · · ∧ en).
In conclusione:det(f) =
∑σ∈Sn
sgn(σ)aσ(1),1 . . . aσ(n),n,
che e proprio una delle forme nelle quali si definisce il determinante nei corsi di algebralineare.
Vale la pena di notare che, poiche sgn(σ) = sgn−1(σ), il determinante di una matricee uguale al determinante della trasposta:
det(f) =∑σ∈Sn
sgn(σ)aσ(1),1 . . . aσ(n),n =∑
σ−1∈Sn
sgn(σ−1)a1,σ−1(1) . . . an,σ−1(n).
10.3 Rango
D’ora in poi indicheremo con n la dimensione dello spazio vettoriale V , che supporremofinita.
Osservazione 10.6. Sia f : V → W lineare, e sia e1, . . . , en → V una base di V .Allora:
• f : V → W e iniettiva se e solo se f(e1), . . . , f(en) sono linearmente indipendenti.
• f : V → W e suriettiva se e solo se f(e1), . . . , f(en) sono generatori di W .
• f : V → W e un isomorfismo se e solo se f(e1), . . . , f(en) sono una base di W .
55

Definizione 10.7. Sia f : V → W lineare. Si definisce rango dell’applicazione linearef la dimensione dell’immagine di f .
rk f = dimK(Im f)
Lemma 10.8. Siano v1, . . . , vk ∈ V . Allora v1, . . . , vk sono linearmente indipendenti see solo se v1 ∧ . . . ∧ vk 6= 0
Dimostrazione. • (⇐) Se, per assurdo, i vettori sono dipendenti, uno di essi si scrivecome combinazione lineare degli altri. Supponiamo vk =
∑k−1j=1 ajvj. Allora:
v1 ∧ . . . ∧ vk = v1 ∧ . . . ∧ vk−1 ∧k−1∑j=1
ajvj =k−1∑j=1
aj(v1 ∧ . . . ∧ vk−1 ∧ vj) = 0
• (⇒) Estendiamo v1, . . . , vk a una base di V . Allora v1 ∧ . . .∧ vk e parte di una basedi ΛkV .
Teorema 10.9. Sia f : V → W lineare. Allora:
1. Se f e iniettiva, allora Λkf : ΛkV → ΛkW e iniettiva;
2. Se f e suriettiva, allora Λkf : ΛkV → ΛkW e suriettiva.
Dimostrazione. Cominciamo con il mostrare la prima parte del teorema.Dati e1, . . . , en base di V si ha che l’insieme ei1 ∧ . . . ∧ eik |1 ≤ i1 < . . . < ik ≤ n
e una base di ΛkV . La f iniettiva, dunque si ha che f(e1), . . . , f(en) sono linearmenteindipendenti in W . Possiamo completarli ad una base di W : allora f(ei1) ∧ . . . ∧ f(eik),con 1 ≤ i1 < . . . < ik ≤ n, sono elementi della base associata di ΛkW , dunque sonolinearmente indipendenti.
Adesso vediamo che Λkf e iniettiva. Ci basta verificare che i Λkf(ei1 ∧ . . .∧ eik) sianolinearmente indipendenti. Per definizione di Λkf :
Λkf(ei1 ∧ . . . ∧ eik) = f(ei1) ∧ . . . ∧ f(eik),
che sono indipendenti per quanto visto sopra.Vediamo ora la seconda parte del teorema: dobbiamo mostrare che e possibile colpire
tramite Λkf qualunque elemento di ΛkW . Sia w1 ∧ . . . ∧ wk ∈ ΛkW ; per ciascuno dei wiposso considerare vi tale che f(vi) = wi: tale vettore esiste per la suriettivita di f . Allora:
Λkf(v1 ∧ . . . ∧ vk) = f(v1) ∧ . . . ∧ f(vk) = w1 ∧ . . . ∧ wk.
Poiche i vettori della forma w1 ∧ . . . ∧ wk generano ΛkW , allora, per linearita, Λkf esuriettiva.
Adesso consideriamo l’immagine della nostra funzione lineare f : V → W . Allorapossiamo fattorizzarla nel seguente modo.
Sia Z = Im(f) ⊆ W . Definiamo g : V → Z in modo tale che ∀v ∈ V, g(v) = f(v), edefiniamo j : Z → W l’immersione canonica. Entrambe sono chiaramente funzioni lineari(esercizio per chi non ci crede!), e il seguente diagramma commuta.
56

Vf- W
Z
g
?
∩
j
-
Inoltre, per come sono state costruite, g e suriettiva e j e iniettiva. Allo stesso modola mappa Λkf = Λkj Λkg si puo fattorizzare, attraverso il seguente diagramma.
ΛkVΛkf- ΛkW
ΛkZ
Λkg
?
∩
Λkj
-
Esercizio 10.10. Il precedente diagramma commuta, cioe preso v1 ∧ . . .∧ vk ∈ ΛkV valeche Λkf(v1 ∧ . . . ∧ vk) = Λkj Λkg(v1 ∧ . . . ∧ vk)
Si noti che, in virtu del teorema precedente vale che Λkg e suriettiva, e Λkj e iniettiva.Allora, poiche Λkj e una funzione lineare iniettiva (cioe e un isomorfismo con l’immagine),
Im(Λkf) = Im(Λkj) ∼= ΛkZ.
Da questa uguaglianza segue una proposizione.
prop:rango-esterna Proposizione 10.11. Sia f : V → W lineare. Allora:
1. rk(Λkf) = 0 se e solo se k > rk f ;
2. Se invece k ≤ rk f , allora rk(Λkf) =(
rk fk
).
Dimostrazione. Le dimostrazioni sono molto semplici. Infatti basta osservare che (utiliz-zando la notazione di prima)
rk(Λkf) = dim(ΛkZ)
Ricordando che dimZ = rk f e che la dimensione della potenza esterna ΛkZ e:
1. 0 se e solo se k > dimZ;
2.(
dimZk
)se k ≤ dimZ,
segue banalmente la tesi.
Sia e1, . . . , en una base di V e s1, . . . , sm una base di W. Sia A la matrice rappresen-tativa di una funzione lineare f : V → W . Allora
f(ej) =m∑i=1
aijsi
57

Esempio 10.12. Sia n = 3, m = 2.
A =
(a11 a12 a13
a21 a22 a23
).
Vogliamo sapere qualcosa su Λ2f . Intanto io so che una base di Λ2V e costituita daivettori e1 ∧ e2, e1 ∧ e3, e2 ∧ e3, e che una base di Λ2W e costituita da s1 ∧ s2. Cosafara mai Λ2f(e1 ∧ e2)?
Λ2f(e1 ∧ e2) = f(e1) ∧ f(e2) = (a11a22 − a12a21)s1 ∧ s2
Il coefficiente di s1 ∧ s2 e il determinante del minore 2 × 2 di A ottenuto eliminando laterza colonna.
Vediamo se riusciamo a generalizzare questa osservazione.
Definizione 10.13. Sia e1, . . . , en una base di V e s1, . . . , sm una base di W . Alloraposso definire i multiindici:
J = (j1, . . . , jk) | 1 ≤ j1 < . . . < jk ≤ nI = (i1, . . . , ik) | 1 ≤ i1 < . . . < ik ≤ m.
Per ogni J = (j1, . . . , jk) ∈ J definisco anche
eJ = ej1 ∧ . . . ∧ ejk
e, analogamente, per ogni I = (i1, . . . , ik) ∈ I definisco
sI = si1 ∧ . . . ∧ sik
Posso scrivere allora in modo compatto: eJ |J ∈ J e una base di ΛkV e sI |I ∈ I euna base di ΛkW .
Scegliere un multiindice J e uno I equivale a scegliere rispettivamente k righe e kcolonne della matrice A. Indico con il simbolo AIJ la sottomatrice che si ottiene scegliendoda A tali righe e colonne.
Proposizione 10.14. Con le notazioni appena introdotte:
Λkf(eJ) =∑I∈I
αIJsI
dove αIJ = detAIJ .
Dimostrazione. La dimostrazione che faremo e sostanzialmente analoga al ragionamen-to fatto nel paragrafo
subs:confronto-determinanti10.2.1: valuteremo Λkf su un elemento di base e ci ridurremo
all’esperessione del determinante come somma sulle permutazioni.
Λkf(eJ) = f(ej1) ∧ · · · ∧ f(ejk) =
(m∑i1=1
ai1,j1si1
)∧ · · · ∧
(m∑ik=1
aik,jksik
).
58

Distribuendo le somme rispetto alla potenza esterna e scartando, come gia avevamofatto, i termini con indici ripetuti, otteniamo una somma su tanti termini multipli dielementi di base sI′ per un qualche I ′ ∈ I. Valutiamo la componente del vettore risultantelungo sI , scartando tutti i termini multipli di altri elementi di base:[
Λkf(eJ)]I
=∑σ∈Sk
aσ(j1),j1 . . . aσ(jk),jk(sσ(j1) ∧ · · · ∧ sσ(jk)) =
=∑σ∈Sk
sgn(σ) · aσ(j1),j1 . . . aσ(jk),jk · sI =
= detAIJ · sI .
Banalmente, quindi, si ottiene il seguente risultato:
cor:sottomatrici-esterna Corollario 10.15. Λkf = 0 se e solo se tutte le sottomatrici k × k della matrice Aassociata a f attraverso una qualsiasi base hanno determinante nullo.
Teorema 10.16. Siano A e f come prima. Allora:
rk f = maxk > 0 | A possiede un minore k × k con determinante non nullo.
Dimostrazione. Per la proposizioneprop:rango-esterna10.11 Λkf = 0 se e solo se k > rk f . D’altro canto, per
il corollariocor:sottomatrici-esterna10.15, Λkf = 0 se e solo se tutti i minori k×k hanno determinante nullo.
59

60

Capitolo 11
Undicesima lezione (FilippoCallegaro, 10/11/2009)
11.1 Qualche esercizio
Vediamo brevemente qualche semplice esercizio su gruppi generici, utili per familiarizzarecon le tecniche di dimostrazione che si possono utilizzare su strutture algebriche finite.
Esercizio 11.1. Dimostrare che, per a, b ∈ G gruppo, o(ab) = o(ba).
Supponiamo che (ab)k =
k volte︷ ︸︸ ︷(ab) . . . (ab) = e. Questo vuol dire che a e l’inverso di
b
k−1 volte︷ ︸︸ ︷(ab) . . . (ab). Ma, per gli assiomi di gruppo, l’inverso e tale sia a destra che a sinistra.
Quindi:
e = b
k−1 volte︷ ︸︸ ︷(ab) . . . (ab) a =
k volte︷ ︸︸ ︷(ba) . . . (ba) = (ba)k.
Facendo lo stesso ragionamento al contrario, si ottiene che (ba)k = e implica (ab)k = e.Dunque ab e ba hanno potenze pari a uno contemporaneamente, ossia hanno lo stessoordine.
Esercizio 11.2. Quali sono i gruppi che non hanno sottogruppi propri?
Un gruppo siffatto deve essere ciclico: se non lo fosse si potrebbe trovare un sot-togruppo proprio semplicemente considerando il sottogruppo generato da un elementoqualsiasi.
Tra i sottogruppi propri, gli unici che non hanno sottogruppi propri sono quelli concardinalita prima. Infatti, se G = 〈x〉 e |G| = n = ab non banali, allora xa genera ungruppo di cardinalita b, che e un sottogruppo proprio di G.
E invece immediato constatare che i gruppi ciclici primi non hanno sottogruppi propri,in quanto ogni elemento diverso dall’unita genera tutto il gruppo.
Esercizio 11.3. Dimostrare che se in un gruppo G ogni elemento diverso dall’unita haindice 2, allora G e abeliano.
In un tale gruppo x2 = e, dunque x e inverso di se stesso per ogni x. Dunque, presia, b ∈ G, ab = (ab)−1 = b−1a−1 = ba.
61

11.2 Conteggi di orbite
Abbiamo gia introdotto nella scorsa lezione il concetto di orbita e di stabilizzatore di unelemento in un’azione di gruppo. Abbiamo anche gia visto qualche risultato relativo aproblemi di conteggio delle orbite.
In questa lezione vogliamo vedere altri risultati simili, oltre che convincerci dell’utilitadi sfruttare tecniche di conteggio delle orbite per indagare la struttura di un gruppo.
A livello terminologico, parlando dell’azione di un gruppo G, ci riferiremo all’orbitadi un elemento s usando il simbolo Os ed al suo stabilizzatore usando il simbolo Gs.
prp:orbite-stab-1 Proposizione 11.4. Sia G un gruppo che agisce su un insieme S e sia s ∈ S. Allora epossibile costruire una mappa biunivoca tra Os e G/ Stab s.
Si noti che, in generale, Stab s non e normale, dunque con G/ Stab s indichiamo sem-plicemente l’insieme dei laterali destri, senza assumere su di esso una struttura di gruppo.Il teorema vale banalmente anche se si considera l’insieme Stab s\G dei laterali sinistri.
Dimostrazione. Indichiamo con H lo stabilizzatore di s.Ogni elemento di Os si puo esprimere come g · s per un opportuno g ∈ G. Costruisco
quindi la funzione richiesta mandando g in gH.Dobbiamo dimostrare che tale funzione e ben definita, ossia che non dipende dalla
scelta del particolare g operata per rappresentare un elemento di Os. Siano quindi g, g′ ∈G tali che g · s = g′ · s ∈ Os. Se indichiamo con h = g−1g′, ci rendiamo conto che h ∈ H.Infatti h · s = g−1g′ · s = s. Ma Allora g′H = (gh)H = gH, garantendo quindi la buonadefinizione. La stessa catena di uguaglianze, percorsa in senso contrario, fornisce ancheprova dell’iniettivita della funzione mostrata. La suriettivita, invece, e evidente.
prp:orbite-stab-2 Proposizione 11.5. Sia G un gruppo che agisce sull’insieme S. Sia s ∈ S e s′ ∈ Os,ossia s′ = a · s con a ∈ G. Allora, ponendo ancora H = Stab s:
1. aH = g ∈ G | g · s = s′;
2. Gs′ = aGsa−1.
La dimostrazione di questa proposizione e molto simile a quella della precedente, edil lettore e invitato a provare a trovarla da solo prima di leggerla.
Dimostrazione. Sia ah ∈ aH: allora (ah) ·s = a · (h ·s) = a ·s = s. Al contrario, sia g ∈ Gtale che g · s = s′: risulta che (a−1g) · s = a−1 · (g · s) = a−1 · s′ = s, ossia a−1g ∈ H. Maquindi g ∈ aH.
Per la seconda tesi e sufficiente osservare che se g ∈ Gs′ , allora g · s′ = s′, ossia cheaga−1 · s = s. L’implicazione inversa si costruisce invertendo i ruoli di s e s′.
Esempio 11.6. Per visualizzare il significato di questo teorema puo essere utile conside-rare il gruppo delle isometrie del piano. Lo stabilizzatore di un punto P (ossia l’insiemedelle isometrie che lo fissano) e costituito dalle rotazioni per P e dalle simmetrie perun asse che passa per P . Inoltre, dati due punti qualsiasi P e P ′ e possibile trovare
un’isometria che manda uno nell’altro: la traslazione di vettore−−→PP ′.
Alla luce della proposizioneprp:orbite-stab-211.5 questo significa che le isometrie che mandano P in
P ′ sono tutte e sole le composizioni di un aqualsiasi isometria che mantiene P e della
62

traslazione di vettore−−→PP ′. Inoltre, le isometrie che mantengono P ′ sono tutte le sole le
composizioni della traslazione che manda P ′ in P , di una qualsiasi isometria che mantieneP e di un’altra traslazione, che riporta P in P ′.
Abbiamo visto nell’ambito degli omomorfismi di gruppo che in generale, se H esottogruppo di G, vale l’uguaglianza
|G| = |H| ·∣∣∣∣GH∣∣∣∣ .
Nel caso delle azioni di gruppo vale un risultato molto simile.
prp:orbite-stab-3 Proposizione 11.7. Sia G un gruppo che agisce sull’insieme S. Allora vale che:
1. Preso s ∈ S vale l’uguaglianza |G| = |Gs| · |Os|;
2. Le orbite dei vari elementi di S costituiscono una partizione di S stesso. In parti-colare,
|S| = |Os1|+ |Os2|+ · · ·+ |Osk |,dove i vari s1, . . . , sk sono rappresentanti delle varie orbite di S.
La dimostrazione, piuttosto semplice e ricalcante il caso degli omomorfismi di gruppo,e lasciata al lettore.
Esempio 11.8. In questa lezione saranno molto importanti i gruppo di isometrie dellospazio che mandano in se i solidi platonici. Consideriamo l’esempio piu semplice, ossiail gruppo delle isometrie (anche invertenti) che fissano il tetraedro regolare. Sia T questogruppo.
Possiamo constatare che |T | = 24: esso infatti e isomorfo al gruppo simmetrico diquattro elementi, perche i quattro vertici possono essere permutati in qualsiasi modo.
Fissato un vertice v, l’orbita di v contiene quattro elementi (ogni vertice puo esseremandato in ogni altro) ed il suo stabilizzatore contiene sei elementi (le sei rotazioni chepermutano le tre facce adiacenti al vertice). Il prodotto e 24.
Fissato uno spigolo s (senza considerarne l’orientamento), la sua orbita ha cardinalitasei (ogni spigolo puo andare in ogni altro) ed il suo stabilizzatore quattro (il prodotto delledue riflessioni lungo gli assi perpendicolare e parallelo allo spigolo.
Fissato uno spigolo orientato o, la sua orbita possiede dodici elementi (sei spigolo, cia-scuno contato nei due orientamenti), ma il suo stabilizzatore solo due (le riflessioni sola-mente rispetto all’asse parallelo allo spigolo, perche quelle rispetto all’asse perpendicolareinvertirebbero l’orientamento).
Le facce si comportano esattamente come i vertici, dal momento che sono il loro grafoduale.
Esempi del tutto analoghi si possono costruire con le isometrie che conservano glialtri quattro solidi platonici. Da notare come i gruppi relativi ed al cubo ed all’ottaedrosono isomorfi, cosı come sono isomorfi i gruppi relativi al dodecaedro ed all’icosaedro.Questo fatto si vede facilmente constatando che il cubo e il duale dell’ottaedro (ossiasi puo ottenere “sostituendo” ogni vertice con una faccia ed ogni faccia con un vertice,ed adattando di conseguenza gli spigoli) e viceversa. Analogamente per dodecaedro eicosaedro.
63

11.3 Applicazioni a dimostrazioni di struttura dei
gruppi
Vediamo ora come i risultati visti sui conteggi di orbite possano essere utilizzati perprovare risultati di struttura di gruppi. Introduciamo prima un semplice lemma, la di-mostrazione del quale e una banale applicazione della definizione di gruppo e che quindiviene lasciata come esercizio al lettore.
Lemma 11.9. Se H e K sono sottogruppi dello stesso gruppo G, allora H ∩ K esottogruppo di G, H e K.
Proposizione 11.10. Sia G un gruppo e H e K due suoi sottogruppi. Allora vale laseguente disuguaglianza:
[G : K] ≥ [H : H ∩K].
Dimostrazione. Sia S = GK
l’insieme dei laterali destri di H in G. Per definizione, [G :K] = |S|.
Facciamo agire H su S per prodotto (vale a dire, consideriamo l’azione che mandah ∈ H e aK ∈ S in h · aK = (ha)K, verificare per esercizio che essa effettivamente eun’azione): qual e lo stabilizzatore di K = eK ∈ S in quest’azione?
HK = h ∈ H | hK = K = h ∈ H | h ∈ K = H ∩K.
Ma, applicando la proposizioneprp:orbite-stab-311.7,
[G : K] = |S| ≥ |OK | =|H||HK |
= [H : H ∩K].
Tipicamente esistono due modi canonici con i quali un gruppo G puo agire su sestesso: per prodotto (g · x = gx) e per coniugio (g · x = gxg−1). In entrambi i casi, fissatoun g, possiamo considerare la funzione ϕg : G→ G tale che ϕg(x) = g · x.
Nel caso dell’azione per prodotto, la funzione ϕg non e, in generale, un automorfismo.Tuttavia tale funzione e una permutazione dell’insieme sostegno di G (ossia di G consi-derato senza la sua struttura di gruppo), che ha la proprieta di spostare ogni elemento.Inoltre, per ogni coppia di elementi g e g′ e possibile trovare una funzione di questo tipoche manda uno nell’altro (la funzione ϕg′g−1).
Nel caso dell’azione per coniugio, la funzione ϕg e un automorfismo di G. Gli auto-morfismi esprimibili in questa forma si chiamano interni, e formano un sottogruppo delgruppo di tutti gli automorfismi di G (la dimostrazione e piuttosto evidente).
Particolarmente importanti sono gli elementi di G che nell’azione per coniugio hannoorbita di cardinalita 1: tali elementi, infatti, hanno la proprieta di commutare con ognialtro elemento del gruppo. Essi formato il centro del gruppo, che e un sottogruppo normalein G (e, tra l’altro, un sottogruppo normale particolarmente di lusso). Esso e indicato, ingenerale, con il simbolo Z(G).
La seconda parte della proposizioneprp:orbite-stab-311.7 puo dunque essere scritta in questo modo:
|G| =∑i∈I
|Cgi| = |Z(G)|+∑i∈I′|Cgi |, (11.1) eq:card-centro
64

dove I e un opportuno insieme di indici tale che gi indichi esattamente un elemento perogni orbita distinta e I ′ e un insieme di indici analogo a I, ma che escluda gli elementiappartenenti al centro.
Gli insiemi Cg sono denominati classi di coniugio. Lo stabilizzatore di un elemento ge chiamato centralizzatore.
Utilizzando l’uguaglianza appena vista e possibile provare un teorema molto utile inteoria dei gruppi.
Teorema 11.11. Sia G un gruppo e sia p un primo che divide |G|. Allora G possiede unsottogruppo di ordine p.
Acc, non riesco a ricostruirela dimostrazione.
11.4 Classificazione dei sottogruppi finiti di SO(3)
Vogliamo ora utilizzare le conoscenze viste fin’ora per trovare tutti i sottogruppi finiti diSO(3).
Teorema 11.12. I sottogruppi finiti di SO(3) sono:
• I gruppi ciclici Ck, ovvero le rotazioni di asse fissato e angolo 2nπk
, n = 0, . . . , k−1;
• I gruppi diedrali Dk, ovvero le isometrie dirette che fissano un prisma di altezzainfinita che ha per base un k-agono regolare, ovvero le rotazioni lungo l’asse delprisma di angolo 2nπ
k, n = 1, . . . , k e le rotazioni di angolo π che hanno per asse un
asse di simmetria della base del prisma;
• Ciascuno dei gruppi di isometrie dirette che fissano i solidi platonici.
Dimostrazione. Sia G sottogruppo finito di SO(3). Considero un elemento g di G diversodall’identita. Sappiamo che g e una rotazione lungo una retta r, quindi ha per insiemedei punti fissi proprio r.
Sia −p, p = r∩S2 l’insieme dei poli di g e sia P = poli di g | g ∈ G\e. Sia inoltreN = |G|.
G agisce su P . Infatti sia p polo di g ∈ G e sia h ∈ G. h ∈ SO(3), quindi h · p ∈ S2. Siha (hgh−1)(h ·p) = hg ·p = h ·p, quindi h ·p e polo di hgh−1 ∈ G e G agisce effettivamentesu P .
Per quanto dimostrato precedentemente, si ha |G| = |Gp||Op|. Sia rp = |Gp| e np =|Op|. Possiamo subito vedere che se p e polo di g, si ha g, e ⊆ Gp, quindi rp ≥ 2.
Se per ogni polo p sommo il numero di rotazioni che lo fissa diverse dall’identita(ovvero quelle con l’asse passante per p) conto due volte ciascuna rotazione (una voltaper ciascuno dei due poli):
2(N − 1) =∑p∈P
(rp − 1),
ossia1
N
∑p∈P
(rp − 1) = 2− 2
N.
Raggruppiamo i poli per orbite: dati p e p′ della stessa orbita, si ha p′ = g ·p per g ∈ Gopportuno. Per quanto dimostrato precedentemente Gp′ = gGpg
−1, quindi rp = rp′ .
65

Sia P ′ ⊆ P contenente uno ed un solo rappresentante di ogni orbita. L’equazioneprecedente diventa
1
N
∑p∈P ′
(rp − 1)np = 2− 2
N.
Ricordando che N = rpnp, si ottiene∑p∈P ′
(1− 1
rp
)= 2− 2
N. (11.2) eq:orbite-sgr-so3
Come abbiamo visto, rp ≥ 2, dunque 1 − 1rp≥ 1
2. Dal momento che 2 − 2
N< 2, la
sommatoria a sinistra puo avere al massimo tre termini, dunque ci sono al massimo treorbite distinte.
Inoltre 1− 1rp< 1, e supponendo N ≥ 2, si ha 2− 2
N≥ 1, quindi ci sono almeno due
orbite.
Caso con due orbite Siano r1, r2 le cardinalita degli stabilizzatori di ciascun elementodella prima e della seconda orbita. Inserendo nell’equazione (
eq:orbite-sgr-so311.2) si ottiene:(
1− 1
r1
)+
(1− 1
r2
)= 2− 2
N,
ossia 1r1
+ 1r2
= 2N
.Deve quindi essere r1, r2 ≤ N , da cui risulta r1 = r2 = N . Questo e il caso del gruppo
ciclico di ordine N . Le due orbite corrispondono esattamente a due poli, ossia i due policomuni a tutte le rotazioni che stanno nel gruppo.Sarebbe bello dimostrare
questo fatto, cosı come leconclusioni analoghe neglialtri casi.
Caso con tre orbite Siano r1, r2, r3 le cardinalita degli stabilizzatori di ciascun ele-mento delle tre orbite. Senza perdita di generalita possiamo supporre r1 ≤ r2 ≤ r3. La(eq:orbite-sgr-so311.2) diventa allora:
1
r1
+1
r2
+1
r3
= 1 +2
N.
Se per i = 1, 2, 3 si ha ri ≥ 3, allora
1
r1
+1
r2
+1
r3
≤ 1 < 1 +2
N,
che e impossible. Deduciamo allora (ricordando r1 ≥ 2) che r1 = 2.L’equazione diventa quindi
1
r2
+1
r3
=1
2+
2
N.
Analogamente a prima possiamo escludere che r3 ≥ r2 ≥ 4. Infatti in tal caso siavrebbe
1
r2
+1
r3
≤ 1
2<
1
2+
2
N,
che e nuovamente impossibile. Le uniche possibilita rimaste sono r2 = 2 oppure r2 = 3.Se r2 = 2, allora r3 = N
2: il gruppo che si ottiene e il diedrale di ordine N
2.
Come avevamo detto, il sottogruppo diedrale puo essere visto come l’insieme dellerotazioni che mandano in se un prisma infinito a base N
2-gonale.Una figura aiuterebbe mol-
toLe tre orbite sono cosı composte:
66

• Un’orbita e composta da due poli opposti, appartenenti all’asse del prisma. Talipoli sono mandati l’uno nell’altro dalle rotazioni di asse perpendicolare all’altezzadel prisma.
• Nel caso in cui N2
e pari, le altre due orbite sono costituite dai punti posti rispet-tivamente di fronte alle facce ed agli spigoli laterali del prisma. Queste due orbitesono conservate dalle rotazioni intorno all’asse del prisma.
• Il caso in cui N2
e dispari e del tutto analogo, ma questa volta i punti di fronte allefacce ed agli spigoli sono misichiati nelle due orbite.
Al contrario, se r2 = 3, allora 1r3
= 16
+ 2N
. Poiche questo implica 1r3> 1
6deve risultare
r3 ≤ 5. Tutti e tre tali casi sono possibili, e corrispondono ai gruppi di simmetrie diretteche conservano i solidi platonici (si ricordi che, come si e notato prima, cubo e ottaedrosono analoghi da questo punto di vista, cosı come dodecaedro e icosaedro).
Nello specifico:
• Se r3 = 3, allora N = 12: e il caso del tetraedro;
• Se r3 = 4, allora N = 24: e il caso del cubo e dell’ottaedro;
• Se r3 = 5, allora N = 60: e il caso del dodecaedro e dell’icosaedro.
Tutti i casi possibili a questo punto sono stati analizzati e la dimostrazione e completa.
67

68
Capitolo 12
Dodicesima lezione (Angelo Vistoli,11/11/2009)
12.1 Decomponibilita in potenze esterne
Studiando le potenze esterne si puo essere indotti a pensare che ciascun elementi di ΛkVsia scrivibile come v1 ∧ · · · ∧ vk per alcuni v1, . . . , vk ∈ V . In realta questo, in generale,non e vero.
Definizione 12.1. α ∈ ΛkV si dice decomponibile se esistono v1, . . . , vk tali che α =v1 ∧ . . . ∧ vk.
Nonostante, come abbiamo visto, i vettori decomponibili generino tutta la potenzaesterna, possono esistere vettori non decomponibili, in quando non e detto che, presi α eβ decomponibili, α + β sia decomponibile.
Esercizio 12.2. Se k = 1, Λ1V ∼= V , dunque, chiaramente, ogni vettore e decomponibile.Sia n = dimV . Mostrare allora che ogni vettore in Λn−1V e decomponibile.
Esercizio 12.3. Consideriamo n = 4, k = 2 e sia e1, e2, e3, e4 base di V . Allorae1 ∧ e2, e1 ∧ e3, e1 ∧ e4, e2 ∧ e3, e2 ∧ e4, e3 ∧ e4 e base di Λ2V . Sia
α =∑
1≤i<j≤4
pijei ∧ ej.
α e decomponibile se e solo se esistono v e w tali che α = v ∧ w, dove v = a1e1 +· · ·+ a4e4 e w = b1e1 + · · ·+ b4e4.
Svolgendo i conti si ottiene:
v ∧ w = (a1b2 − a2b1)e1 ∧ e2 + · · ·+ (a3b4 − a4b3)e3 ∧ e4 =∑
1≤i<j≤4
(aibj − ajbi)ei ∧ ej.
Dunque i pij sono i determinante dei minori 2× 2 della matrice:a1 b1
a2 b2
a3 b3
a4 b4
.
69

Dimostrare che a =∑
1≤i<j≤4 pijei ∧ ej e decomponibile se e solo se p12p34 − p13p24 +p14p23 = 0.
Esercizio 12.4. A ∈ Mn(K) trA =∑n
i=1 aii.f : V → V. Se A e la matrice di f rispettoad una base, allora trA e indipendente dalla base scelta. Si definisce tr f = trA. Cos’etr Λif? Per i = 1 e la traccia di f, per i = n e il suo determinante. L’esercizio e dimostrareche per ogni i viene un coefficente del polinomio caratteristico di f , a meno del segno.
12.2 Prodotti tensoriali
Definizione 12.5. Siano V e W spazi vettoriali su K. Un prodotto tensoriale V ⊗KW euno spazio vettoriale su K con una funzione bilineare V ×W → V ⊗W che manda (v, w)in v ⊗ w per la quale valga la seguente proprieta universale.
Per ogni spazio vettoriale Z e per ogni funzione bilineare h : V × W → Z esisteun’unica funzione lineare h : V ⊗W → Z tale che h(v ⊗ w) = h(v, w).
Per alcuni versi, la struttura dei prodotti tensoriali e molto simile a quella delle potenzeesterne. In un qualche modo, i primi si comportano nei confronti delle funzioni bilinearipiu o meno nello stesso modo in cui le seconde si comportano verso le funzioni multilinearialternanti. Ovviamente, tuttavia, si tratta comunque di spazi distinti e da non confonderetra di loro.
Le prime dimostrazioni sui prodotti tensioriali sono molto simili alle relative dimo-strazioni sulle potenze esterne, dunque sono lasciate come esercizi.
Esercizio 12.6. Dati V e W spazi vettoriali, V ⊗W e unico a meno di un isomorfismocanonico: piu precisamente, siano V ⊗W e V ⊗′W due prodotti tensoriali. Allora esisteed e unico un isomorfismo ϕ : V ⊗W → V ⊗′W tale che
ϕ(v ⊗ w) = v ⊗′ w ∀v ∈ V,w ∈ W .
Esercizio 12.7. Dati V e W spazi vettoriali, V ⊗W esiste.
Esercizio 12.8. V ⊗W e generato dai vettori v ⊗ w, con v ∈ V e w ∈ W .
Osservazione 12.9. Tramite la proprieta universale dei prodotti tensoriali, si puo dimo-strare che esiste una funzione lineare V ⊗ V → Λ2V che manda v ⊗ w in v ∧ w. Essa esurgettiva (perche i v ∧ w generano Λ2V ), ma non iniettiva (ad esempio, fissato v si hache v ⊗ v 6= 0, mentre v ∧ v = 0).
Esercizio 12.10. Il prodotto tensoriale e associativo (a meno di isomorfismo): (V1 ⊗V2)⊗ V3
∼= V1 ⊗ (V2 ⊗ V3).
12.2.1 Basi di prodotti tensoriali e teoremi di rappresentazione
Analogamente a come abbiamo fatto per le potenze esterne, anche per i prodotti tensorialisiamo interessati, date due basi degli spazi generatori, a trovare una base per il prodotto.Anche la dimostrazione di questo teorema e molto simile al teorema analogo per le potenzeesterne.
70

thm:base-prodotto-tensoriale Teorema 12.11. Siano e : I → V e f : J → W basi rispettivamente di V e W . Allorala funzione I × J → V ⊗W che manda (ei, ej) in ei ⊗ ej e una base di V ⊗W .
Dimostrazione. Abbiamo gia visto che V ⊗ W e generato dai vettori del tipo v ⊗ w.Scrivendo v =
∑i aiei e w =
∑j bjfj si ha che v⊗w =
∑i,j aibj(ei⊗ fj), quindi i vettori
ei ⊗ fj generano V ⊗W .Per far vedere che sono anche linearmente indipendenti (e, dunque, che formano una
base), ci e sufficiente mostrare che, preso (i, j) ∈ I × J , esiste una funzione lineareϕij : V ⊗W → K tale che
ϕij(ek ⊗ fl) =
0 se (k, l) 6= (i, j)
1 se (k, l) = (i, j).
Per fare cio, utilizzando la proprieta universale, basta mostrare che esiste hij : V ×W → K bilineare tale che
hij(ek, fl) =
0 se (k, l) 6= (i, j)
1 se (k, l) = (i, j).
Tuttavia, poiche e e f sono basi rispettivamente di V e W , esistono αi : V → K taleche αi(ek) = 0 se k 6= i e αi(ek) = 1 se k = i, e βj : W → K tale che βj(fl) = 0 sel 6= j e βj(fl) = 1 se l = j. La hij(v, w) = αi(v)βj(w) soddisfa la richiesta e completa ladimostrazione.
Esempio 12.12. Sia K[x] lo spazio dei polinomi nella variabile x a coefficienti in K:una sua base e xi | i ∈ N. Sia poi K[x, y] lo spazio dei polinomi nelle variabili x e y acoefficienti in K: analogamente, una sua base e xiyj | i, j ∈ N.
Allora posso (sempre sfruttando la proprieta universale) costruire un omomorfismotra K[x]⊗K[y] e K[x, y]: Questo schema e bruttissi-
mo, non esiste un modo permigliorarlo?
ϕ : K[x]⊗K[y] → K[x, y]f(x)⊗ g(y) 7→ f(x)g(y).
In particolare, poiche la base descritta nel teoremathm:base-prodotto-tensoriale12.11 di K[x]⊗K[y] viene mandata
in una base di K[x, y] (in modo ovvio), ϕ risulta essere un isomorfismo.
ex:funzioni-continue-tensore Esempio 12.13. Sia C(Rn) lo spazio delle funzioni continue Rn → R. Considero lafunzione Φ : C(R)⊗C(R)→ C(R2) tale che Φ(f(x)⊗ g(y)) = [(x, y) 7→ f(x)g(y)] (comeal solito, l’esistenza di questa funzione discende dalla proprieta universale del prodottotensoriale).
Φ non e un isomorfismo: in effetti, la funzione (x, y) 7→ exy appartiene a C(R2),ma non e possibile scriverla come somma del tipo a1f1g1 + . . . + anfngn, con ak ∈ R efk, gk : R→ R continue.
Si puo tuttavia dimostrare che e iniettivo. Per fare questo, serve il prossimo teorema.
Gli ultimi due teoremi di questa lezione si concentrano sul problema di rappresentarei vettori di un prodotto tensoriale in termini di somma di elementi dei due spazi V eW . Purtroppo, non e conosciuto un modo di costruire una base canonica di V ⊗ Wprescindendo dalla scelta di due basi di V e W . Non e conosciuto oppure si
sa che non esiste?
71

Teorema 12.14 (primo teorema di rappresentazione). Sia α ∈ V ⊗W . Allora α si puoscrivere come
∑i vi ⊗ wi, con i vi e i wi linearmente indipendenti.
Dimostrazione. α si puo ovviamente scrivere come∑r
i=1 vi⊗wi, perche abbiamo visto chei vettori del tipo v⊗w generano V ⊗W . Consideriamo ora una scrittura per la quale r eminimo. Allora i vi sono linearmente indipendenti: infatti, se, per assurdo, vr =
∑r−1i=1 aivi
per certi coefficienti ai, allora α =∑r−1
i=1 vi ⊗ (wi + aiwr), contro la minimalita di r. Unragionamento analogo dimostra che anche i wi sono linearmente indipendenti.
Possiamo ora dimostrare l’iniettivita della funzione Φ costruita nell’esempioex:funzioni-continue-tensore12.13. Sia
α ∈ C(R)⊗ C(R) tale che Φ(α) = 0, ossia α ∈ ker(Φ).Per il teorema appena visto, possiamo scrivere α =
∑ri=1 fi ⊗ gi. Allora Φ(α) =∑r
i=1 fi(x)gi(y). Fissato y, questa e una combinazione lineare delle fi, linearmente indi-pendenti perche ottenute dal primo teorema di rappresentazione, ed e quindi nulla se esolo se g1(y) = · · · = gr(y) = 0. Ma quaesto deve valere per ogni y, dunque gi ≡ 0 perogni i. Dunque α ≡ 0, ossia Φ e iniettiva.
Il secondo teorema di rappresentazione ha il pregio di fornire un risultato di unicita,ma richiede di conoscere una base per almeno uno dei due spazi.
Teorema 12.15 (secondo teorema di rappresentazione). Sia e : I → V base di V . Allora,preso α ∈ V ⊗W , esso si scrive in modo unico come
∑i∈I ei⊗wi per certi wi, tutti nulli
tranne che un numero finito.
Dimostrazione. L’esistenza della scrittura proposta segue direttamente dal primo teore-ma, dove vengono sviluppati i vi in termini della base e. E anche evidente che solo unnumero finito di wi risultano non nulli.
Dimostro ora l’unicita: siano εi i vettori della base duale di V ∗ associata a e, ossia taliche
εi(ej) =
1 se i = j
0 se i 6= j.
Costruisco quindi la funzione bilineare h : V ×W → W tale che h(v, w) = εi(v)w.
Dunque, per la proprieta universale del prodotto tensoriale, esiste hi : V ⊗ W → Wlineare tale che hi(v ⊗ w) = εi(v)w.
Supponiamo α =∑
k ek ⊗wk =∑
k ek ⊗w′k: allora∑
k ek ⊗ (wk −w′k) = 0. Ma allora,per un qualsiasi indice i:
0 = hi
(∑k
ek ⊗ (wk − w′k)
)=∑k
εi(ek)(wk − w′k) = wi − w′i.
Per l’arbitrarieta di i, questo ci dice che le due scritture di α sono in realta identiche.
72

Capitolo 13
Tredicesima lezione (FilippoCallegaro, 17/11/2009)
13.1 Sottogruppi finiti di SO(3)
Nell’ultima lezione erano stati studiati tutti i sottogruppi finiti di SO(3). In particolare,avevamo visto che facendo agire un qualsiasi gruppo G di cardinalita N finita sull’insiemedei poli di R3, grazie all’equazione delle classi era possibile dedurre l’esistenza di 2 o 3orbite e ottenere informazioni sullo stabilizzatore. Chiamato ri il numero di elementi nellostabilizzatore dell’i-esima orbita e ni il numero di poli nell’i-esima orbita, sono accettabilisolo le seguenti possibilita:
• ri = (N,N) e ni = (1, 1): G ciclico;
• ri = (2, 2, N2
) e ni = (N2, N
2, 2): G diedrale;
• ri = (2, 3, 3) e ni = (6, 4, 4): G gruppo di isometrie di un tetraedro;
• ri = (2, 3, 4) e ni = (12, 8, 6): G gruppo di isometrie di un cubo;
• ri = (2, 3, 5) e ni = (30, 20, 12): gruppo di isometrie di un dodecaedro;
Si nota che niri = N , perche il numero di elementi del gruppo che stabilizza un polo euguale al numero di elementi del gruppo che stabilizza un altro polo della stessa orbita.Infatti, se gp = p e q = hp allora gp = p implica hgh−1q = hgp = hp = hh−1q = q dove ge h sono elementi del gruppo, p e q sono poli.
13.1.1 Gruppo ciclico
Nel primo caso (ri = (N,N) e ni = (1, 1)) due poli vengono fissati da ogni rotazione. Idue poli sono chiaramente opposti, perche l’opposto di un polo fissato viene fissato a suavolta. Sia ρ la rotazione di angolo minimo lungo l’asse dei due poli. Se ρ′ ∈ G, allora ρ′ emultiplo intero di ρ perche altrimenti esisterebbe un k tale che ρ′−k∗ρ ∈ G per divisioneeuclidea e ρ non sarebbe la piu piccola rotazione del gruppo G.
Allora, se ogni rotazione e multipla di ρ, dato che il gruppo e finito, esiste un N taleche ρN = id: ho ottenuto il gruppo ciclico di ordine N.
73
13.1.2 Gruppo diedrale
Se invece ri = (2, 2, N2
) e ni = (N2, N
2, 2), posso considerare n3 = 2, cioe i due poli che
vengono mandati in se stessi da N/2 elementi del gruppo e vengono scambiati l’uno conl’altro da altrettanti elementi. I due poli sono chiaramente opposti, quindi tutta la rettapassante per questi due poli e fissata dalla rotazione. Allora anche l’ortogonale di questaretta (un piano) e invariante per qualunque rotazione di questo gruppo. A questo puntopossiamo considerare le possibili rotazioni ristrette a questo piano, che costituiscono unsottogruppo di SO(2). Dato che gli unici sottogruppi di SO(2) finiti sono i diedrali ei ciclici, dobbiamo concludere che il gruppo ottenuto e diedrale o ciclico (quest’ultimapossibilita e esclusa perche non ho nessuna orbita di N elementi).
Ora analizziamo il gruppo diedrale ottenuto: consideriamo un poligono regolare diN/2 lati nel piano. Se N/2 e pari, le due orbite sono costituite rispettivamente dalle rettepassanti per i vertici del poligono e da quelle passanti per i punti medi dei lati. Quellache in R2 e interpretata come una simmetria, in R3 e la rotazione di 180 lungo un assecontenuto nel piano. Se N/2 e dispari, il ragionamento e molto simile, ma le due orbitesono fatte dalle rette passanti per un vertice e il punto medio del lato opposto.
13.1.3 Isometrie dei solidi platonici
Gli ultimi tre sottogruppi finiti di SO(3) sono costituiti dalle isometrie dei solidi plato-nici. I gruppi sono 3 e non 5 perche le isometrie del cubo sono le stesse delle isometriedell’ottaedro e le isometrie del dodecaedro sono le stesse delle isometrie dell’icosaedro.
Per dimostrare questo fatto, e necessario il concetto di poliedro duale. Un solidoplatonico e completamente determinato da 3 insiemi e alcune relazioni tra di essi. Inparticolare, i tre insiemi sono:
• F insieme delle facce;
• S insieme degli spigoli;
• V insieme dei vertici.
Inoltre, devono essere rispettate le relazioni per cui ogni spigolo contiene esattamentedue vertici e uno spigolo appartiene esattamente a due facce. Per costruire il poliedroduale, possiamo usare la seguente procedura: definiamo come insieme V ′=F , S ′=S, F ′=Ve ∀v′ ∈ V ′, s′ ∈ S ′, v′ ∈ s′ ⇔ s ∈ f dove f e la faccia corrispondente a v′ e s lo spigolocorrispondente a s′. Il poliedro astratto ottenuto e il duale e nel caso dei solidi platonicipuo essere realizzato sempre. Graficamente, si puo ottenere il poliedro duale usando comevertici i centri delle facce del poliedro originale e collegando due vertici se e solo se lefacce originali hanno in comune uno spigolo. Si osserva che il duale di un tetraedro e untetraedro, il duale di un cubo e un ottaedro e il duale di un icosaedro e un dodecaedro.
Questo discorso e necessario alla dimostrazione perche le isometrie di un solido sonole stesse del suo solido duale, e cio si dimostra pensando all’azione di un’isometria sugliinsiemi F ,V ,S, che li permuta ma conserva le relazioni.
74

13.1.4 Isometrie del tetraedro
Ora torniamo all’analisi delle possibili isometrie dei solidi platonici e consideriamo il casoN = 12 e ni = (6, 4, 4). Analizziamo n3 = 4 e vediamo come agiscono le rotazioni chefissano il polo p1 (se p1 e un polo, allora c’e almeno una rotazione diversa dall’identita chelo fissa). Questa rotazione, a meno di rinominare gli altri poli, manda p2 in p3, p3 in p4
e p4 in p2 e dato che e una rotazione ortogonale le distanze sono rispettate e il triangolop2, p3, p4 e equilatero. Analogamente si puo dimostrare che comunque presi tre punti trai pi questi formano un triangolo equilatero. Allora il solido p1, p2, p3, p4 e un tetraedroregolare, che viene fissato da ogni rotazione del gruppo G. Possiamo affermare che G eun sottogruppo delle isometrie del tetraedro che ha 12 elementi. Ma dato che le isometriedel tetraedro sono appunto 12, i due gruppi coincidono.
13.1.5 Isometrie del cubo
Analogamente al caso precedente, consideriamo i sei poli appartenenti alla terza orbita(n3 = 6). Ora facciamo agire lo stabilizzatore di p1, cioe sul gruppo H = Gp1 , sulla terzaorbita: il gruppo ha 4 elementi perche r3 = 4 e per l’equazione delle classi
6 = |O3| =∑x
|4||Hx|
. Puo essere 6 = 1 + 1 + 4 o 6 = 1 + 1 + 2 + 2 perche un’orbita deve essere banale (quelladi p1) e la cardinalita delle orbite divide la cardinalita del gruppo G. Almeno un altroelemento deve essere sempre fissato e dato che l’azione non e banale questo elementopuo essere solo l’opposto di p1 che chiamiamo p2. Tutti gli elementi di questo grupposono quindi rotazioni intorno all’asse p1p2. Allora il gruppo non puo che essere ciclico egenerato da una rotazione di 90.
Nell’azione, dato che le isometrie conservano le distanze, si puo dimostrare che p3p4 =p4p5 = p5p6 = p6p3 e che p1p3 = p1p4 = p1p5 = p1p6. Con un ragionamento simile su Gp3
si dimostra che il solido ottenuto e un ottaedro e che il gruppo G e un sottogruppo delleisometrie dell’ottaedro. Ma allora e tutto il gruppo perche ha 24 elementi.
13.1.6 Isometrie del dodecaedro
Analizziamo come nei casi precedenti l’orbitaO3, composta da 12 elementi, e in particolarelo stabilizzatore Gp1 , che agisce su O3 ed e formato da 5 elementi (quindi isomorfo a Z5).Non ci possono essere piu di due punti fissi, quindi avro due orbite da 5 elementi, dato chela cardinalita di ogni orbita e divisore di 5. Chiaramente i punti opposti p1 e p2 sono fissi,quindi il gruppo Gp1 e formato dalle rotazioni intorno all’asse passante per p1 e p2. Possoquindi affermare che le distanze tra due poli consecutivi tra p3, p4, p5, p6 e p7 sono uguali,come le distanze di ognuno di questi da p1. Ora basta reiterare il ragionamento sugli altripoli per dimostrare che per ognuno di essi ne esistono 5 che si trovano a distanza d daesso, tutti a distanza d tra loro.
Interpretando questi punti come i centri delle facce di un dodecaedro, notiamo chepossiamo sempre mandare una faccia in un’altra con una trasformazione del gruppo G(appartengono alla stessa orbita) e ognuna delle facce viene sempre mandata in un’altra
75

faccia. Allora ho che il gruppo G e un sottogruppo delle isometrie che fissano un dode-caedro centrato nell’origine e, per ragioni di cardinalita, G non puo che essere l’interogruppo di queste isometrie.
OSSERVAZIONE: il gruppo delle rotazioni che fissano un icosaedro e isomorfo algruppo delle permutazioni pari su un insieme di 5 elementi (A5). Lo dimostreremo nellaprossima lezione, dato che prima e necessario un ripasso sui gruppi di permutazioni.
13.2 Gruppo simmetrico e segnatura
13.2.1 Scrittura in cicli
Abbiamo detto che gli elementi del gruppo simmetrico Sn sono le permutazioni (ossia lefunzioni bigettive) di un insieme di n elementi (per comodita, in genere faremo riferimentoall’insieme supporto 1, . . . , n).
In generale, per descrivere una permutazione e sufficiente dichiarare dove va ciascunodegli elementi dell’insieme di supporto. Per esempio:
σ =
(1 2 3 4 5 62 4 6 1 5 3
),
rappresentando con questa scrittura che ogni elemento della prima riga viene mandatoda σ nel corrispondente elemento della seconda riga. Dunque, in questo caso, σ(1) = 2,σ(2) = 4, . . .
Questa scrittura, oltre ad essere piuttosto ingombrante, non permette di afferrare alvolo la reale struttura della permutazione. In generale, risulta molto piu utile considerareun’altra scrittura, detta scrittura in cicli, che andiamo a descrivere.
E evidente che che il gruppo Sn agisce in modo naturale sul suo insieme di supportoIn = 1, . . . , n: per σ ∈ Sn, k ∈ In, σ · k = σ(k) e un’azione. Un ciclo di σ e una delleorbite di tale azione (analogamente, la parola ciclo viene utilizzata anche per indicareuna permutazione nella quale gli elementi spostati appartengono tutti allo stesso ciclo).
La scrittura in cicli consiste, molto semplicemente, nella scrittura dei vari cicli del-la permutazione, ciascuno ordinato in modo che σ porti ogni elementi nel successivo,e l’ultimo nel primo. I cicli banali (ossia gli elementi che non vengono spostati dallapermutazione) possono essere omessi. La permutazione considerata prima si puo anchescrivere:Non sono sicuro che sia il
modo migliore di fare laspaziatura σ = (1 2 4)(3 6)(5) = (1 2 4)(3 6).
13.2.2 Decomposizione in trasposizioni
Un’interessante osservazione sulla struttura delle permutazione puo essere fatta provandoa decomporle in termini di trasposizioni.
Definizione 13.1. Una trasposizione e una permutazione che scambia solamente dueelementi i e j, con i 6= j. In altre parole, e una permutazione che si puo scrivere come(i j).
E immediato osservare che le trasposizioni sono involuzioni, ossia coincidono con ilproprio inverso.
76

Proposizione 13.2. Ogni permutazione σ ∈ Sn puo essere scritta come prodotto di almassimo n− 1 trasposizioni.
Dimostrazione. E piuttosto semplice dimostrare questa proposizione per induzione. Ilcaso con n = 1 e banale, poiche il gruppo Sn e banale: l’identita si puo scrivere comeprodotto di nessuna trasposizione.
Supponiamo ora che la proposizione sia vera per un certo n > 1 e proviamola per n+1.Presa una permutazione σ ∈ Sn+1, sia k = σ(n+ 1): ponendo τ = (k n+ 1)σ abbiamoche τ(n+ 1) = n+ 1. Ma allora τ(In) = In, dunque posso considerare la permutazione τristretta a In come elemento di Sn.
Per ipotesi induttiva, τ si puo scrivere come prodotto di trasposizioni in Sn. Tuttavia,le stesse trasposizioni, una volta esteso l’insieme di definizione, sono anche trasposizionidi Sn+1, dunque τ si puo scrivere come prodotto di trasposizioni in Sn+1. Questo permettedi scrivere nello stesso modo anche σ = (k n+ 1) τ .
Inoltre, poiche sappiamo che la decomposizione di τ contiene al massimo n − 1trasposizioni, quella di σ ne contiene al massimo n.
Lo stesso teorema si puo anche dismostrare direttamente, osservando che un ciclo puoessere decomposto in trasposizioni in questo modo:
(x1 x2 . . . xk) = (x1 x2)(x2 x3) . . . (xk−1 xk).
13.2.3 Segnatura di una permutazione
Sia σ una permutazione. E del tutto evidente che non esiste un unico modo di scriverlacome prodotto di trasposizioni. Tuttavia, ci si puo rendere conto del fatto che e bendefinita la parita del numero di trasposizioni necessarie. Cerchiamo di precisare benequesto fatto.
Definiamo innanzitutto la segnatura di una permutazione. Il motivo di questa defini-zione sara chiaro alla fine del paragrafo.
Definizione 13.3. Si chiama segnatura la funzione ε : Sn → ±1 cosı definita:
ε(σ) =∏
1≤i<j≤n
σ(i)− σ(j)
i− j.
Perche la definizione sia ben posta, dobbiamo assicurarci che il valore della produt-toria sia effettivamente ±1. Possiamo vedere facilmente questo fatto se notiamo che, perla bigettivita di σ, ogni denominatore del tipo i − j si semplifica con esattamente unnumeratore, a meno eventualmente del segno.
Di ε possiamo dire ben di piu: essa e moltiplicativa, ossia e un omomorfismo di gruppi(il gruppo ±1 e, ovviamente, considerato con la moltiplicazione). Infatti:
ε(σ τ) =∏
1≤i<j≤n
σ(τ(i))− σ(τ(j))
i− j=
=∏
1≤i<j≤n
σ(τ(i))− σ(τ(j))
τ(i)− τ(j)·∏
1≤i<j≤n
τ(i)− τ(j)
i− j=
= ε(σ) · ε(τ).
77

Si noti che in questi passaggi tutti i cambiamenti di variabile sono stati possibili graziealla biunivocita di σ e τ .
E a questo punto evidente questo fatto:
Proposizione 13.4. La parita del numero di trasposizioni nelle quali si puo decomporreuna permutazione σ e fissata.
Dimostrazione. Per la moltiplicativita di ε, se ε(σ) e pari, allora la cardinalita del-la decomposizione in trasposizioni (tutte con segnatura −1) e pari. Viceversa nel casodispari.
Il nucleo dell’omomorfismo ε : Sn → ±1 e il cosiddetto gruppo alternante di ordinen, che viene indicato con il simbolo An. Si tratta del sottogruppo delle permutazioni pari.Per le prorieta generali del nucleo gia viste, |An| = |Sn|
2ed, inoltre, An e normale in Sn.
13.2.4 Matrici e segnatura
La segnatura di una permutazione puo anche essere espressa in altri termini. Consideriamola matrice di permutazione Mσ associata ad una determinata permutazione σ, definita inquesto modo:
(Mσ)ij =
1 se g(j) = i
0 altrimenti.
Il significato del nome e evidente: tale matrice manda il versore ej nel versore eσ(j).
Proposizione 13.5. Vale allora che ε(σ) = detMσ.
Dimostrazione. Sappiamo infatti che il determinante della matrice identica (ossia la se-gnatura della matrice associata alla permutazione identica) e 1. Per l’alternanza, il de-terminante associato ad una matrice di trasposizione e −1 (una matrice di trasposizio-ne si ottiene scambiando due colonne della matrice identica). Inoltre il determinante emoltiplicativo, e Mσ ·Mτ = Mστ . Dunque:
detMσ · detMτ = detMστ .
Poiche abbiamo appena dimostrato che le trasposizioni generano il gruppo simmetrico,possiamo dedurre la formula che vogliamo dimostrare per una permutazione qualsiasi.
78

Capitolo 14
Quattordicesima lezione (AngeloVistoli, 18/11/2009)
14.1 Richiami e notazioni
Nel corso della lezione considereremo gli spazi vettoriali V , W , V ′, W ′ su uno stessocampo K (come al solito, K = R o K = C), con dimV = m, dimW = n, dimV ′ = p,dimW ′ = q. Siano inoltre e : m −→ V e h n −→ W due basi rispettivamente di V e W ,f : V −→ V ′, g : W −→ W ′ funzioni lineari.
Ricordiamo alcuni fatti:
• e⊗ h : m× n −→ V ⊗W (i, j) 7→ ei ⊗ hj e una base di V ⊗W ;
• dato α ∈ V ⊗W
– ∃vi ⊂ V, wi ⊂ W , con ciascun insieme linearmente indipendente, tali cheα =
∑i vi ⊗ wi
– ∃!wi ⊂ W , insieme linearmente indipendente, tale che α =∑
i ei ⊗ wi– ∃!aij ⊂ K t.c. α =
∑i,j aijei ⊗ hj
14.2 Applicazioni tra prodotti tensoriali
Osservazione 14.1. La funzione V ×W −→ V ′⊗W ′, (v, w) 7→ f(v)⊗ g(w) e bilineare;per la proprieta universale ∃! f⊗g : V⊗W −→ V ′⊗W ′ lineare tale che v⊗w 7→ f(v)⊗g(w)∀v ∈ V,w ∈ W .
Consideriamo le basi ei di V, hi di W, e′i di V ′, h′i di W ′; siano A e B le matrici cherappresentano f e g in queste basi; ovvero f(ej) =
∑i aije
′i, g(hl) =
∑k bklh
′k si ha quindi
(f ⊗ g)(ej ⊗ hl) = f(ej) ⊗ g(hl) = (∑
i aije′i) ⊗ (
∑k bklh
′k) =
∑i,k aijbkl(e
′i ⊗ h′k) si ha
quindi
Osservazione 14.2. La matrice che rappresenta f ⊗ g nelle basi e⊗ h, e′ ⊗ h′ e
Mik,jl = aijbkl
79

ProdottoKronecker Definizione 14.3. M = A⊗B e il prodotto di Kronecker tra A e B.
Esercizio 14.4. 1. f, g iniettive ⇒ f ⊗ g e iniettiva
2. f, g suriettive ⇒ f ⊗ g e suriettiva
3. siano f : V → V ′, f ′ : V ′ → V ′′, g : W → W ′, g′ : W ′ → W ′′ lineari allora(f ′ f)⊗ (g′ g) = (f ′ ⊗ g′) (f ⊗ g)
Lemma 14.5. rk(f ⊗ g) = rkf · rkg
Dimostrazione. Siano T ed U le immagini di f e di g rispettivamente; le applicazionipossono essere fattorizzate in modo naturale: f = f1 f2, g = g1 g2 le f1, g1 scelte inquesto modo sono iniettive, le f2, g2 suriettive. Per il punto 3 dell’esercizio precedentef ⊗ g = (f1 f2) ⊗ (g1 g2) = (f1 ⊗ g1) (f2 ⊗ g2); per il punto 1 f1 ⊗ g1 e iniettiva,quindi rkf ⊗ g = rk(f1⊗ g1) (f2⊗ g2) = rk(f2⊗ g2); per il punto 2 f2⊗ g2 e suriettiva:rk(f2 ⊗ g2) = dimU · dimT ⇒ rk(f ⊗ g) = rkf · rkg.
Proposizione 14.6. Siano f : V → V, g : W → W lineari. Allora tr(f ⊗ g) = tr f · tr g.
Dimostrazione. Fissata una base di V ed una di W , siano A e B le matrici che rappre-sentano f e g, rispettivamente, in tali basi. Ricordiamo che:
tr f =m∑i=1
aii, tr g =n∑k=1
bkk.
La matrice che rappresenta f ⊗ g e Mik,jl = aijbkl, quindi:
tr(f ⊗ g) =∑i,k
aiibkk =m∑i=1
aii
n∑k=1
bkk = tr f · tr g.
14.2.1 Esercizi
Si svolgano gli esercizi seguenti assumendo K = C.
Esercizio 14.7. f : V → V, g : W → W . Si trovi una formula per det (f ⊗ g) infunzione di det(f) e det(g)
Dimostrazione. Visto che siamo in C partiamo trovando una base in cui le funzioni sianotriangolari (per esempio la base di Jordan). A questo punto sappiamo che se a f e associatala martice ai,j e a g la matrice bk,l allora la matrice associata a f ⊗ g nella base indottasara c(i,k),(j,l) = ai,jbk,l. c(i,k),(j,l) risulta triangolare e mediante facili conti si arriva che
det(f ⊗ g) = det(c(i,k),(j,l)) = det(ai,j)n det(bk,l)
m = det(f)n det(g)m
dove dim(V ) = n dim(W ) = mQuesta dimostrazione e in-completa: per parlare dimatrici triangolari bisognaintrodurre un’ordinamentosulla base. Inoltre, a me ilrisultato viene con n e mscambiati di posto.
Esercizio 14.8. f : V → V, g : W → W . Siano λi gli autovalori di f e µk gli autovaloridi g. Si dimostri che gli autovalori di f ⊗ g sono tutti e soli λiµk
80

14.3 Qualcosa sugli spazi duali
14.3.1 Il duale
Definizione 14.9. V ∗ = Hom(V,K) e l’insieme delle forme lineari di V su K si dicespazio duale di V . Si vede facilemente che ha una naturale struttura di spazio vettoriale.Fissata una base ei di V questa scelta induce una scelta di una base fj dello spazio dualeV ∗ definita mediante fi(ej) = δi,j
Definizione 14.10. Data una f ∈ Hom(V,W ) si dice funzione duale f ∗ ∈ Hom(W ∗, V ∗)la forma definita con f ∗(ψ) = ψ f con ψ ∈ W ∗.
Si verifica che f ∗ e lineare e che vale (f g)∗ = g∗ f ∗.
Esercizio 14.11. Scelte le basi per V e W , la matrice associata a f ∗ rispetto alle basiduali indotte e la trasposta della matrice associata a f .
Corollario 14.12. Siano A ∈ Kl,m B ∈ Km,n matrici. Allora (AB)t = AtBt
14.3.2 Le applicazioni lineari fra spazi vettoriali e il duale
Fissate le basi ei e hj di due spazi vettoriali V e W rispettivamente, c’e un modo imme-diato costruire un isomorfismo fra lo spazio vettoriale Hom(V,W ) e Kdim(W )×dim(V ) dellematrici.
Una scelta di basi per V e W induce anche una base su Hom(V,W ) che risulta esserela controimmagine della base canonica per Kdim(W )×dim(V ) secondo l’isomorfismo di prima.La base gi,j sara fatta nel seguente modo: gi,j(ek) = δk,jhi.
Questo fa si che venga naturale scrivere un’applicazioneH : V ∗×W → Hom(V,W ) chedefiniamo nel seguente modo H : (ψ,w) 7→ ψ(·)w. Una facile verifica ci conferma che la re-lazione cosı definita e lineare in ognuna delle componenti cioeH ∈ Bil (V ∗,W ; Hom(V,W ))e bilineare.
A questo punto sfruttando la proprieta universale del prodotto tensoriale si ha che∃!τ : V ∗ ⊗W → Hom(V,W ) per cui valga τ(ψ ⊗ w) = H(ψ,w) = ψ(·)w
Teorema 14.13. τ e un isomorfismo.
Dimostrazione. Per quanto detto prima τ e lineare. Inoltre possiamo dimostrare che eun isomorfismo considerando che manda una base in una base. Infatti sia fi la base diV ∗ indotta dalla base ei di V mentre hj una base per W allora fi ⊗ hj e una base perV ∗ ⊗W . Ma per come abbiamo definito τ risulta τ(fi ⊗ hj) = gj,i che e una base perHom(V,W )
Osservazione 14.14. Anche se abbiamo introdotto le basi su V e W per dimostrareil teorema, la definizione di τ e indipendente dalla base scelta. Infatti si usa solo ladefinizione di H : (ψ,w) 7→ ψ(·)w e la proprieta universale del prodotto tensoriale.
Un caso di particolare interesse e quando W = V . Si ha allora che ∃!τ : (V ∗ ⊗V )→ End(V ) che risulta anche un’isomorfismo. Inoltre si ha che, sempre per la proprietauniversale, ∃!π : V ∗⊗ V → K tale che π : (ψ, v) 7→ ψ(v). Ma allora possiamo costruire inmodo canonico un’applicazione lineare tr = π τ−1 : End(V )→ K.
81

Teorema 14.15. La forma lineare cosı definita e la traccia di un’applicazione. Essacoincide con la definizione numerica della traccia di una matrice quando questa e associataad un’endomorfismo mediante la scelta di una base. Da qui segue in modo immediato chela traccia di una matrice e invariante per similitudine (cambio di base).
82
Capitolo 15
Quidicesima lezione (FilippoCallegaro, 24/11/2009)
15.1 Digressione sul gruppo simmetrico Sn
Abbiamo gia conosciuto il gruppo simmetrico Sn, che e il gruppo di permutazioni (biie-zioni) di un insieme di n elementi. Adesso vogliamo definire che cos’e il segno di unapermutazione.
Definizione 15.1. Si definisce segno di una permutazione σ ∈ Sn:
ε(σ) =∏
1≤i<j≤n
σ(j)− σ(i)
j − i
Esercizio 15.2. Dimostrare che:
• ε(σ) ∈ 1,−1
• Il segno di una trasposizione (un 2-ciclo) e −1, cioe ε((ij)) = −1
• Il segno e un omomorfismo da Sn → Z2, cioe ε(στ) = ε(σ)ε(τ)
Definizione 15.3. Si definisce sottogruppo alternante di Sn il sottogruppo
An = ker(ε)
Osservazione 15.4. An / Sn, perche e il ker di un omomorfismo e ogni ker e normale.
15.1.1 Sn+1 come il gruppo di simmetrie di un n-simplesso stan-dard
Perche Sn si chiama gruppo simmetrico? Si nota che Sn agisce in modo naturale su Rnpermutando le sue coordinate.
Sia infatti e1, . . . , en la base standard di Rn. Allora Sn agisce su questa base per-mutando i suoi elementi.
Se vogliamo avere una visione piu geometrica di quello che succede (Davide, da quifino alla fine del paragrafo puoi saltare), possiamo dare la definizione di n-simplesso.
83

Definizione 15.5. Si definisce inviluppo convesso di un sottoinsieme S ⊂ V , con Vspazio vettoriale e S 6= ∅, il piu piccolo insieme convesso che contiene S. In formule:
Inv(S) =⋂
C⊇S,Cconvesso
C
Definizione 15.6. Si definisce n− simplesso standard l’inviluppo convesso della basestandard di Rn+1, cioe della base ei|i = 1, . . . n+ 1.
Esso si indica con il simbolo ∆n.
∆n = Inv(ei|i = 1, . . . n+ 1)
Esercizio 15.7. 1.⋂C e non vuota (tutti i C contengono S e V e uno di questi C)
2.⋂C e convessa
Osservazione 15.8. Possiamo vedere l’azione di Sn+1 su Rn+1 come l’azione di Sn+1
sull’n-simplesso, in modo tale che Sn+1 permuti i vertici dell’n-simplesso, cioe gli elementidella base. Osserviamo che c’e un vettore di Rn+1 lasciato fisso da Sn+1. Questo vettoree:
v =n+1∑i=1
ei
Allora anche la retta generata da v, r =< v >, e fissata da Sn+1.Ma quindi anche ogni spazio affine ortogonale a v e fissato. Dunque Sn+1 fissa r⊥,
sottospazio vettoriale ortogonale a r, e di dimensione n.Osserviamo a questo punto che il nostro simplesso sta in un sottospazio affine di Rn+1
avente come giacitura r⊥. In particolare:
∆n ⊆ x ∈ Rn+1|n+1∑i=1
xi = 1
Allora il gruppo simmetrico ci da le simmetrie di ∆n come sottoinsieme del suosupporto, ovvero del sottospazio n-dimensionale affine di Rn+1 che lo contiene..
∆n = x ∈ Rn+1|n+1∑i=1
xi = 1, xi ≥ 0,∀i = 1, . . . , n+ 1
Sn+1 = Simmetrie(∆n)
15.2 Isometrie dell’icosaedro
In questa sezione indicheremo con I+ il gruppo delle isometrie a determinante positivo(rotazioni) dell’icosaedro (poliedro con 20 facce triangolari).
Teorema 15.9. I+ = A5, ovvero il gruppo di rotazioni dell’icosaedro e A5, sottogruppoalternante di S5.
Dimostrazione. Schema della dimostrazione:
84
• Cerco i 5 elementi che permuto con le rotazioni dell’icosaedro.
• Cerco un omomorfismo ϕ : I+ → S5.
• Dimostro che Im(ϕ) ⊆ A5.
• Dimostro che ϕ e iniettiva e suriettiva su A5.
Facciamo delle considerazioni preliminari: innanzitutto ci aspettiamo di trovare un gruppocon 60 elementi, perche, una volta scelti due vertici adiacenti dell’icosaedro, che chiame-remo A e B, una rotazione dell’icosaedro e determinata dal vertice in cui mando A (per ilquale ho 12 scelte) e il vertice in cui mando B (per il quale posso scegliere tra i 5 verticiadiacenti all’immagine di A). In totale ho dunque 60 rotazioni.
Notiamo che |S5| = 5! = 120 e che, per il teorema di Lagrange sulle classi laterali,
|A5| = |S5|2
= 60.Notiamo infine che visto che l’icosaedro e duale al dodecaedro, il gruppo delle rotazioni
dell’icosaedro coincidera con quello delle rotazioni del dodecaedro.Adesso vediamo che dentro il dodecaedro si puo inscrivere un cubo, come mostrato
dalla figura (qui non so come spiegarlo).Un osservatore attento potrebbe scoprire che si riescono a inscrivere esattamente 5
cubi dentro il dodecaedro: infatti ogni cubo ha gli spigoli che sono diagonali delle faccepentagonali del dodecaedro, ed il cubo e determinato completamente dal primo spigolo.Dunque, scelta una faccia F del dodecaedro, si ha che F sara un pentagono; le suediagonali sono 5 e ciascuna di esse puo essere presa come spigolo di un cubo inscritto, ecosı individua uno dei 5 cubi: percio potremo riferirci ai cubi semplicemente dicendo ladiagonale della faccia F che prendiamo in considerazione.
Notiamo inoltre che una rotazione permuta i cubi. Abbiamo cosı la nostra mappa:
ϕ : I+ → Big(Cubi) ∼= S5
Contiamo ora le isometrie del dodecaedro e poi cerchiamo di capire cosa fanno sui 5cubi.
1. id, l’elemento neutro
2. le rotazioni di ordine 5, che fissano una coppia di facce del dodecaedro. Esse sono 4per ciascuna delle 6 coppie di facce (sono 4 e non 5 perche bisogna togliere l’identita),per cui in totale sono 24.
3. le rotazioni di ordine 3, che fissano una delle 10 coppie di vertici, che percio sono20
4. le rotazioni di ordine 2, che fissano gli spigoli opposti, ed esse sono 15.
Abbiamo trovato 1 + 24 + 20 + 15 = 60 rotazioni del dodecaedro, che per motivi dicardinalita sono tutte le isometrie positive del dodecaedro.
Adesso, ricordando che, fissata una faccia, le 5 diagonali determinano i 5 cubi, cimettiamo a studiare come agiscono sui cubi le rotazioni che abbiamo classificato.
1. id, l’elemento neutro, li lascia invariati. Corrisponde a id in S5.
85
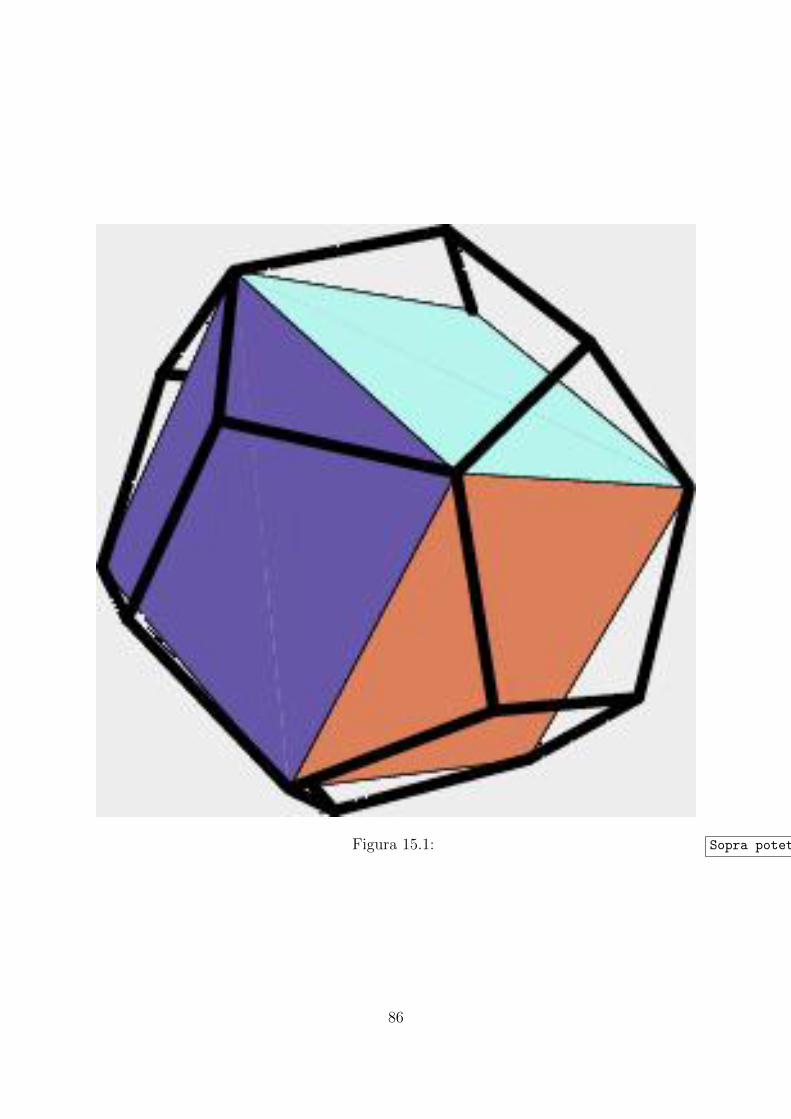
Figura 15.1: Sopra potete vedere come si inscrive un cubo in un dodecaedro.
86
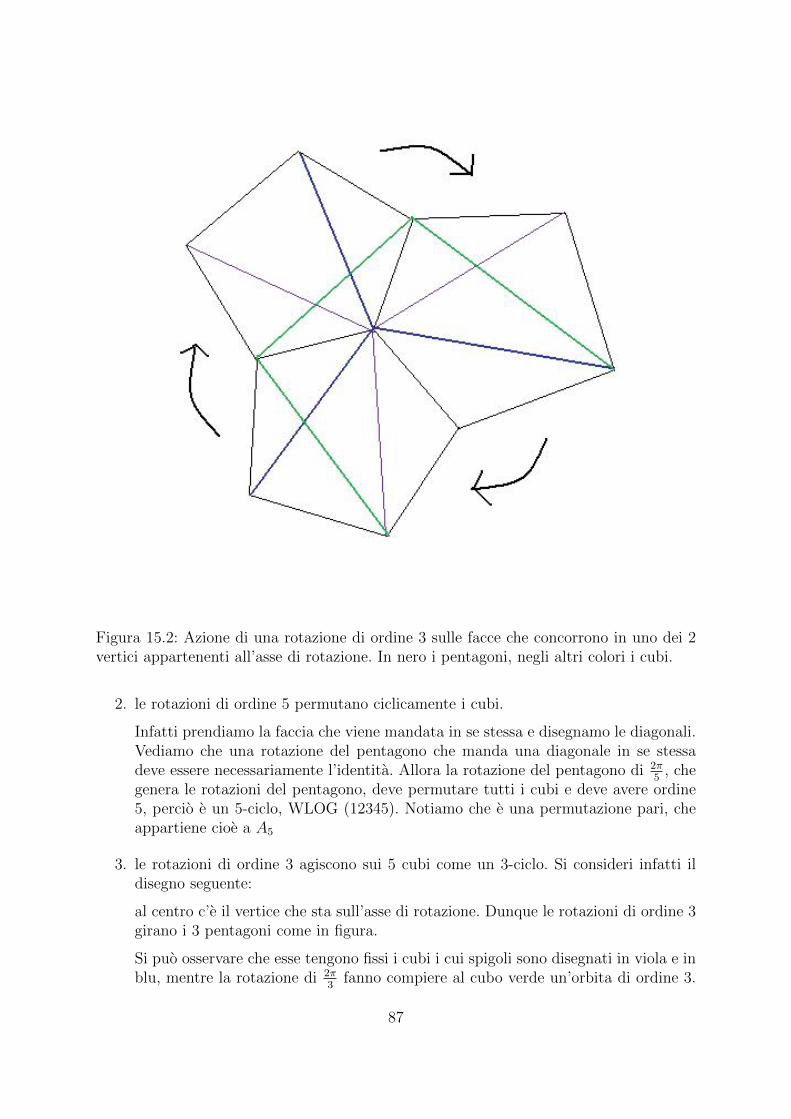
Figura 15.2: Azione di una rotazione di ordine 3 sulle facce che concorrono in uno dei 2vertici appartenenti all’asse di rotazione. In nero i pentagoni, negli altri colori i cubi.
2. le rotazioni di ordine 5 permutano ciclicamente i cubi.
Infatti prendiamo la faccia che viene mandata in se stessa e disegnamo le diagonali.Vediamo che una rotazione del pentagono che manda una diagonale in se stessadeve essere necessariamente l’identita. Allora la rotazione del pentagono di 2π
5, che
genera le rotazioni del pentagono, deve permutare tutti i cubi e deve avere ordine5, percio e un 5-ciclo, WLOG (12345). Notiamo che e una permutazione pari, cheappartiene cioe a A5
3. le rotazioni di ordine 3 agiscono sui 5 cubi come un 3-ciclo. Si consideri infatti ildisegno seguente:
al centro c’e il vertice che sta sull’asse di rotazione. Dunque le rotazioni di ordine 3girano i 3 pentagoni come in figura.
Si puo osservare che esse tengono fissi i cubi i cui spigoli sono disegnati in viola e inblu, mentre la rotazione di 2π
3fanno compiere al cubo verde un’orbita di ordine 3.
87

Pertanto la permutazione associata e un 3-ciclo, WLOG (123). Notiamo che anchein questo caso e pari.
4. le rotazioni di ordine 2 sono un prodotto di trasposizioni. Consideriamo anche inquesto caso una figura.
I cubi rosso e arancione si scambiano sotto una rotazione di π, cosı come i cubi blue viola, mentre il cubo verde viene mandato in se. La permutazione associata inquesto caso e (12)(34), anche questa appartenente ad A5
A questo punto abbiamo quasi finito la dimostrazione, perche il fatto che ϕ sia unomomorfismo e evidente, e per quanto visto sopra tutte le permutazione immagine dellerotazioni appartengono ad A5.
Ci manca di dimostrare che ϕ e iniettiva, e per farlo ci basta far vedere che il suo kere id. Ma questo lo sappiamo perche abbiamo visto che tutte le rotazioni agiscono inmodo non banale sui cubi a parte l’identita, quindi abbiamo finito.
A questo punto ci si potrebbe chiedere se vale che il gruppe delle isometrie (a deter-minante positivo e negativo) dell’icosaedro sia isomorfo a S5. Come vedremo tra poco larisposta e no, anche se la cardinalita di entrambio i gruppi e la stessa.
Teorema 15.10.
I ∼= A5 × Z2
ovvero il gruppo delle isometrie di R3 che lasciano fisso un dodecaedro (o un icosaedro)e isomorfo a A5 × Z2.
Dimostrazione. Innanzitutto possiamo osservare che la cardinalita di I e 120 (possiamomandare un vertice dell’icosaedro in 20 vertici, un vertice adiacente in 5 vertici e a questopunto abbiamo 2 possibilita, a seconda del segno del determinante della trasformazione).Inoltre osserviamo che c’e un elemento di I diverso dall’identita che commuta con tutti glielementi di I, percio sta nel centro (che e il sottogruppo degli elementi che commutanocon tutti gli elementi): questo elemento e −1, cioe la trasformazione che manda ognivettore nel suo opposto. Questa trasformazione commuta con tutto I perche commutacon tutto O3, in quanto multipla dell’identita. Questa trasformazione non appartenevaad A5, ed ha ordine 2, dunque abbiamo un sottogruppo di I isomorfo a Z2, contenuto nelcentro di I.
Allora, riassumendo, abbiamo che: A5 < I, Z2 / I (ogni sottogruppo del centro enormale), I = A5Z2, Z2∩A5 = id. Allora, in virtu del teorema dei prodotti semidiretti(credo fosse la lezione 3), si ha che I ∼= A5 n Z2.
Adesso bisogna trovare l’omomorfismo ψ : A5 → Aut(Z2). Ma Aut(Z2) = id, per-che l’elemento neutro deve andare in se e l’altro elemento per esclusione pure. Allora ψe l’omomorfismo banale e il prodotto semidiretto e dunque diretto (basta andare a ve-dere come funziona l’operazione nei prodotti semidiretti). Allora abbiamo ottenuto cheI congA5 × Z2.
Le isometrie di un tetraedro sono T ∼= S4, e in generale Isom(∆n) = Sn+1 (sono lepermutazioni della base standard di Rn+1).
88

Figura 15.3: Azione di una rotazione di ordine 2 sulle 2 facce che concorrono in uno dei 2 spigoli che intersecano l’asse di rotazione.
89

15.2.1 Isometrie del semiipercubo
Le isometrie dell’ipercubo sono un sottogruppo delle isometrie di Rn, cioe Isom([−1, 1]n) <O(n).
Definizione 15.11. Si colori un ipercubo a colori alterni (se un vertice e di un coloretutti quelli adiacenti sono di colore diverso).
Si dice semiipercubo l’inviluppo convesso dei vertici di uno stesso colore.
Osservazione 15.12. Il numero di vertici del semiipercubo e 2n−1, percio non e mai unn-simplesso se n 6= 3, perche il numero di vertici di un n-simplesso e n + 1. Invece lefacce del semiipercubo sono degli (n-1)-simplessi.
15.3 Qualcosa sui gruppi
15.3.1 Teorema di Cauchy
Definizione 15.13. Si dice centro di un gruppo G, e si indica con Z(G), il sottogruppodegli elementi che commutano con ogni elemento di G.
Z(G) = g ∈ G|gx = xg,∀x ∈ G
Teorema 15.14. Sia G un gruppo finito, p primo, p|G.Allora ∃x ∈ G, x 6= e, xp = e.
Dimostrazione. G agisce su se stesso per coniugio. Sia g ∈ G. Indichiamo con Cg la classedi coniugio di g, ovvero l’orbita di g in G.
Si ha che g ∈ Z(G)↔ Cg = g. G si partiziona nelle sue classi di coniugio.G = Cg1 ∪ . . . ∪ Cgk , e l’unione e disgiunta. Raggruppando gli elementi del centro
abbiamo G = Z ∪ Cg1 ∪ . . . ∪ Cgh Inoltre |Cgi | = GStab(gi)
, e Stab(gi) < G, ed e unsottogruppo proprio, perche se fosse la sola identita avrei che gi non commuta con sestesso, e se fosse tutto G allora gi dovrebbe appartenere al centro Z.
Impostiamo la dimostrazione per induzione su |G|. Per il passo base basta considerareun gruppo di p elementi, nel quale un elemento puo avere ordine 1 (e allora e l’elementoneutro) o p. Facciamo il passo induttivo.
|G| = |Z|+h∑i=1
|Cgi |
Se p||Stab(gi)| per un qualche i, allora ho finito perche posso applicare l’ipotesiinduttiva e dire che c’e un elemento di ordine p all’interno di Stab(gi) < G.
Dunque posso supporre che p non divida |Stab(gi)| ∀i. Allora, poiche |Cgi | = GStab(gi)
,
si deduce che p||Cgi|, ∀i. Dall’equazione delle classi scritta sopra e dal fatto che p dividesia |G| sia |Cgi |, otteniamo che p||Z|. Se |Z| < |G|, allora possiamo applicare l’ipotesiinduttiva e dire che c’e un elemento di ordine p nel centro Z < G.
Se invece Z coincide con G, allora G e abeliano.
90

Sia in tal caso x ∈ G, x 6= e. Allora il gruppo generato da x avra ordine m, che divideral’ordine di G. Chiamo H =< x >∼= Zm. Se p|m, allora x
mp ha ordine p. Altrimenti posso
quozientare per H, perche e un sottogruppo normale di G, in quanto G e abeliano.Abbiamo che p||G
H|. Per ipotesi induttiva esiste un x ∈ G
Hdi ordine p. x = yH, per
un qualche y. Sappiamo che, per ipotesi induttiva, yp ∈ H; allora ypm = e. Allora ym e ilnostro candidato, infatti ha ordine che divide p, ed e diverso dall’identita, perche ym /∈ H.Infatti supponiamo per assurdo che ym ∈ H. Allora x = e, e dunque p|m. ASSURDO.
15.3.2 Teorema di Bezout
Teorema 15.15. Sia A un PID (ad esempio A = Z). Allora MCD(m,n) = k ↔ ∃a, b ∈A, am+ bn = k e ∀c, d ∈ A, ∃f ∈ A, cm+ dn = kf .
15.3.3 Azioni di gruppo
In questa sezione considereremo un gruppo G che agisce su un insieme S finito. Denote-remo con Gs = Stab(s) lo stabilizzatore di s e con Sg = s ∈ S|gs = s.
Teorema 15.16. ∑s∈S
|Gs| =∑g∈G
|Sg|
Dimostrazione. Sto contando due volte la stessa cosa, cioe∑
(g,s)∈G×S Xgs=s, dove Xgs=se 1 se gs = s, altrimenti e 0.
Teorema 15.17. Uguaglianza di Burnside.Sia O = O orbite di G in S. Allora
|G| · |O| =∑g∈G
|Sg|
Dimostrazione.∑g∈G
Sg =∑s∈S
|Gs| =∑Oi∈O
∑s∈Oi
|Gs| =∑Oi∈O
∑s∈Oi
|G||Oi|
=∑Oi∈O
|G| = |G| · |O|
Osserviamo che se G agisce su S, allora G agisce su R|S|, permutando gli elementidella base. Allora Burnside si traduce nel seguente modo:
|G| · |O| =∑g∈G
tr(g)
dove abbiamo indicato con g l’applicazione lineare indotta dall’azione su R|S|.Quest’uguaglianza e vera perche
∑g∈G S
g =∑
g∈G tr(g), e di quest’ultima ci si puoconvincere se si pensa che s e fissato da g se e solo se sulla matrice associata a g compareun 1 sulla diagonale sul posto di s.
91
Esercizio 15.18. Sia S = colorazioni in bianco e nero dei vertici di un ottagonoregolare.
Quante sono le orbite del gruppo diedrale D8 su S?
Esercizio 15.19. Analogamente sia S = colorazioni bianco e nero di una scacchieran× n.
Quante sono le orbite di D4 su S?
Esercizio 15.20. Dimostrare che se G agisce su S in modo non banale e se, dette n = |G|e r = |S|, n > r!, allora G ha un sottogruppo normale non banale.
Esercizio 15.21. Sia G un p-gruppo (cioe |G| = pn) che sgisce su S, talce che p nondivida |S|. Allora G ha un punto fisso in S.
92
Capitolo 16
Sedicesima lezione (Angelo Vistoli,25/11/2009)
16.1 Richiami sul polinomio minimo
Diamo alcune informazioni (senza dimostrazione) sulle proprieta del polinomio minimo.Cominciamo innanzitutto con la seguente
Definizione 16.1. Sia T un operatore lineare su di uno spazio vettoriale. Sia A =p(x) ∈ C[x] | p(T ) = 0. Si puo dimostrare che l’insieme A e quello che si chiamaun ideale, ossia e chiuso per somma (interna) e prodotto per un qualunque elemento diC[x].
Se lo spazio vettoriale ha dimensione finita, A non e banale, ossia non contienesoltanto il polinomio nullo.
Si puo inoltre dimostrare che tutti gli elementi di A sono multipli di un certo polinomiocon coefficiente di grado massimo uguale ad 1, che viene detto il polinomio minimodell’operatore T .
Esempio 16.2. Sia ad esempio T l’operatore rappresentato in una qualche base dallamatrice 1 1 0
0 1 00 0 1
Si ha allora (T − Id) =
0 1 00 0 00 0 0
e (T − Id)2 = 0. Il polinomio minimo di T e
allora un divisore di (x− 1)2 che non divide (x− 1), dunque e necessariamente (x− 1)2.
HamiltonCayley Teorema 16.3. (Hamilton-Cayley) Sia V uno spazio vettoriale di dimensione finita. Conle notazioni precedenti, e detti p(x) il polinomio caratteristico dell’operatore T , m(x) ilsuo polinomio minimo, si ha p(x) ∈ A, o, il che e lo stesso, m(x) divide p(x).
Esempio 16.4. Sia T l’operatore introdotto sopra. Come visto, il suo polinomio minimoe (T − 1)2, mentre il suo polinomio caratteristico e chiaramente (T − 1)3, come si vedefacilmente dalla forma diagonale della matrice. Si ha in effetti (x− 1)2|(x− 1)3
93

Teorema 16.5. Un operatore T si diagonalizza se, e soltanto se, il suo polinomio minimoe prodotto di fattori di primo grado elevati ad esponente unitario.
Esempio 16.6. Sia ancora T l’operatore introdotto sopra. Il suo polinomio minimo e(T − 1)2, ed infatti esso non si diagonalizza: se si diagonalizzasse, dato che ha solo 1come autovalore, risulterebbe essere l’identita. Ma l’identita ha la medesima matrice inogni base, quindi T non si diagonalizza.
Teorema 16.7. Sia V uno spazio vettoriale di dimensione finita, T ∈ End(V ), W unsottospazio di V invariante per T , cioe tale che T (W ) ⊆ W .
Allora il polinomio minimo della restrizione T|W e un fattore del polinomio minimodi T come operatore di V .
Dimostrazione. La dimostrazione, in realta, e ovvia: se m(x) e il polinomio minimo di Tcome operatore su V si ha
0 = m(T )(v) = m(T )|W (v) = m(T|W )(v)
cioe m(T|W ) = 0, come voluto.
FrigerioMartelli Teorema 16.8. (Frigerio-Martelli) Siano M,N ∈ End(V ) operatori diagonalizzabili.Allora esiste una base nella quale essi sono contemporaneamente diagonali se e soltantose MN = NM .
Dimostrazione. Se si diagonalizzano contemporaneamente, e ovvio che commutino, per-che basta scegliere una base in cui entrambi abbiano matrice diagonale, e le matricidiagonali commutano. Viceversa, supponiamo che commutino, e sia V = W1 ⊕ · · · ⊕Wn
la decomposizione di V in autospazi per M .Notiamo che Wi e invariante per N : infatti, MN(wi) = N(Mwi) = N(λiwi) = λNwi,
cioe Nwi ∈ Wi.Proseguiamo con l’osservazione che il polinomio minimo di N e prodotto di fattori
lineari (perche N si diagonalizza), percio il polinomio minimo di N ristretto a Wi, che eun fattore del polinomio minimo di N come operatore su V , ha ancora tutti fattori linearidistinti. Percio N ristretto a Wi si diagonalizza; e allora sufficiente fissare basi di Wi chediagonalizzino N : l’unione di tali basi e fatta di autovettori per M , in quanto base deisuoi autospazi, e di autovettori per N , per costruzione. In tale base, dunque, M ed Nsono associati a matrici diagonali.
16.2 Teoria della Rappresentazione
La teoria della rappresentazione si propone di studiare le proprieta dei gruppi tramitequelle che sono dette azioni lineari.
rappresentazione Definizione 16.9. Se V e uno spazio vettoriale, si definisce rappresentazione di ungruppo G un’applicazione ρ : G → GL(V ) = Aut(V ) che sia anche un omomorfismo,ossia tale che valgano
ρ(1) = idV , ρ(st) = ρ(s) ρ(t)
Con GL(V ) = Aut(V ) si intende il gruppo delle applicazioni lineari bigettive (auto-morfismi) dello spazio vettoriale in se.
94

Osserviamo inoltre che nel caso il gruppo di cui studiamo le rappresentazioni abbiaqualche altra struttura aggiuntiva (ad esempio quella di spazio metrico, come SO(3))possiamo anche restringerci a quelle rappresentazioni che conservano tali strutture.
Concordiamo infine di indagare sulle rappresentazioni dei gruppi utilizzando comespazi vettoriali solo spazi di dimensione finita sul campo complesso.
16.2.1 Rappresentazioni di alcuni gruppi semplici
Studiamo ora le rappresentazioni di alcuni gruppi semplici.
Se G e il gruppo banale (costituito dalla sola identita) non c’e molto da dire. Comin-ciamo quindi da |G| = 2.
Esiste, a meno di isomorfismi, un solo gruppo di due elementi, ossia il gruppo ciclicoC2 generato da un unico elemento di ordine 2: C2 = 1, s , s2 = 1.
Una rappresentazione ρ : C2 → GL(V ) risulta percio completamente fissata dall’im-magine del generatore: dare una rappresentazione significa infatti trovare un T ∈ GL(V )t.c. T 2 = idV e porre ρ(s) = T, ρ(1) = Idv = T 2; in particolare, le rappresentazioni sonoin bigezione con gli operatori T tali che T 2 = Id.
16.2.2 Digressione sugli operatori T t.c. T 2 = id
Sia λ un autovalore di T , con T 2 = id, e v un autovettore corrispondente. Allora
v = T 2v = λ2v ⇒ λ2 = 1⇒ λ ∈ ±1
Inoltre, T annulla il polinomio p(x) = x2−1 (cioe, T 2−IdV = 0); per quanto ricordatosul polinomio minimo, essendo questo un fattore di x2−1, e prodotto di fattori di grado 1distinti, e come tale ci dice che l’operatore T si diagonalizza: un modo di dire questo e cheesiste una base in cui la matrice associata a T sia diagonale, con soli ±1 sulla diagonale;un modo alternativo e scrivere
V = V1 ⊕ V−1
con V1 = ker(T − 1), V−1 = ker(T + 1), convenendo di indicare con 1 l’identita e con−1 l’opposto dell’identita.
Da questo risultato segue che tutte le rappresentazioni di C2 sono in bigezione con imodi di scrivere V come somma diretta di due sottospazi, uno dei quali, eventualmente,banale.
Osserviamo intanto che in questo caso la richiesta di dimensione finita non e in realtanecessaria.
Se infatti dimV = ∞ possiamo ancora definire V1 = ker(T − 1), V−1 = ker(T + 1), equesti sottospazi si intersecano solo nello zero.
Inoltre, sia v ∈ V . Vorremmo poter scrivere v = v1 + v−1 con v1 ∈ V1, v−1 ∈ V−1.Supponendo che una tale scrittura esista ed applicando T ai due lati dell’uguaglianzatroviamo
v = v1 + v−1, T v = v1 − v−1
95

da cui, facilmente, v1 = v+Tv2, v−1 = v−Tv
2. Ora e evidente che possiamo ripercorrere
il ragionamento nell’altro senso: v1 e v−1 esistono, perche sono dati dalle formule appenascritte. Quindi vale ancora
V = V1 ⊕ V−1
16.2.3 Rappresentazioni dei gruppi ciclici
Estendiamo ora il discorso ad un generico Cn ∼= Z/Zn ∼= 1, s, . . . , sn−1 in cui s e unelemento di ordine esattamente n, cioe tale che sn = 1, sm 6= 1 ∀m < n,m 6= 0.
Com’e fatto un omomorfismo ρ : Cn → GL(V )? E’ completamente fissato dall’imma-gine del generatore s, in quanto ρ(si) = ρ(s)i, ed ogni elemento di Cn si scrive come si
per un opportuno i.
Ci riduciamo quindi a cercare un operatore T = ρ(s) ∈ GL(V ) tale che T n = idV .Notiamo, viceversa, che dato T ∈ GL(V ) con la proprieta che T n = IdV , esiste un’unicarappresentazione ρ : G→ GL(V ) tale che ρ(s) = T .
Vale infatti la seguente
Osservazione 16.10. Un omomorfismo da un gruppo ciclico in un gruppo arbitrario ecompletamente determinato dall’immagine di un generatore.
L’applicazione T deve essere tale da annullare il polinomio xn − 1; l’equazione xn − 1ha, in C, esattamente n soluzioni, tutte distinte. Diamo, per comodita di notazione, laseguente
RadiciDi1 Definizione 16.11. L’insieme delle radici n-esime complesse dell’unita forma un gruppociclico (moltiplicativo), che denotiamo
µn =
1, ω, ω2, . . . , ωn−1
=e
2iπn , e
2·2iπn , . . .
in cui ω e quella che si dice una radice n-esima primitiva, cioe tale che ωn = 1 ma
ωm 6= 1 per ogni 0 < m < n.
Per le proprieta del polinomio minimo, il fatto che xn − 1 abbia radici tutte distin-te implica che l’operatore T si diagonalizza, e come prima si trova che gli autovaloriappartengono tutti a µn.
In particolare, si puo scrivere la decomposizione dello spazio V come
V = V0 ⊕ V1 ⊕ · · · ⊕ Vn−1
in cui Vi = ker(T − ωi), sempre con la convenzione che con lo scalare ωi indichiamol’operatore ωi · IdV .
Anche questa proprieta resta vera in dimensione infinita: mostriamo questo risultatoper il caso speciale n = 3, ma esso e facilmente generalizzabile.
Prima, tuttavia, dimostriamo un semplice risultato sulle radici primitive dell’unita.
96

16.2.4 Una proprieta delle radici primitive di 1
Sia ω una radice n-esima primitiva dell’unita. Allora vale 1+ω+ · · ·+ωn−1 = 0. Forniamodue dimostrazioni di questo fatto.
Prima dimostrazioneE’ nota la scomposizione xn − 1 = (x− 1)(xn−1 + xn−2 + · · ·+ x+ 1). Sostituendo in
questa relazione ω 6= 1 otteniamo 0 = ωn− 1 = (ω− 1)(1 +ω+ · · ·+ωn−1). Dal momentoche ω − 1 6= 0 otteniamo, come voluto, 1 + ω + · · ·+ ωn−1 = 0
Seconda dimostrazione (fisica)Sia s = 1+ω+ . . . ωn−1. Moltiplicando per ω troviamo ωs = ω+ω2 + · · ·+ωn−1 +ωn =
ω + ω2 + · · · + ωn−1 + 1 = 1 + ω + ω2 + · · · + ωn−1 = s, cioe ωs = s ⇒ (1 − ω)s = 0.Essendo 1 6= ω otteniamo ancora s = 0.
Questa dimostrazione corrisponde alla seguente intuizione fisica: i punti nel pianocomplesso 1, ω, . . . , ωn−1 corrispondono ai vertici di un n-agono regolare, e s corrisponde albaricentro di tale poligono (moltiplicato per uno scalare ininfluente). Siccome il poligono
e invariante per rotazione di un angolo2π
n, il baricentro deve essere un punto fisso per
tale rotazione. Ma l’unico tale punto e l’origine, come si voleva dimostrare.
16.2.5 Operatori in dimensione infinita, caso n = 3
Supponiamo, come nel caso n = 2, di saper scrivere v = v0 + v1 + v2 con vi ∈ Vi.Applicando T e T 2 a questa equazione troviamo il sistema di equazioni
v = v0 + v1 + v2
Tv = v0 + ωv1 + ω2v2
T 2v = v0 + ω2v1 + ωv2
Sommando queste tre equazioni e sfruttando la relazione 1 + ω + ω2 = 0 dimostratanel paragrafo precedente troviamo 3v0 = v + Tv + T 2v, da cui otteniamo un’espressioneper v0.
Moltiplicando invece le tre equazioni per 1, ω2, ω e sommando otteniamo la cancella-zione dei termini in v0, v2 e l’espressione 3v1 = v+ω2Tv+ωT 2v, che e pero piu istruttivoriscrivere (in quanto da l’idea di come questo procedimento si generalizzi facilmente alcaso n > 3) come v + ω−1Tv + ω−2T 2v = 3v1.
Infine, analogamente, possiamo ricavare 3v2 = v + ω−2Tv + ω−4T 2v.Tale procedimento si generalizza ad n qualunque e mostra come i risultati di decompo-
sizione di V in somma diretta di ker di opportune applicazioni valga anche in dimensioneinfinita.
Osservazione 16.12. Il caso di V spazio vettoriale reale e notevolmente piu difficile dastudiare, in quanto l’equazione xn − 1 = 0 ha una sola radice reale e dunque non vi egaranzia che l’operatore T si diagonalizzi.
Esercizio 16.13. Sia T ∈ GLd(R), cioe un operatore lineare su uno spazio reale didimensione d, t.c. T 3 = Id. Allora esiste una base opportuna tale che l’operatore T siaassociato alla matrice
97

11
. . .1
R. . .
R
con R matrici 2× 2 di rotazione.Un risultato simile vale anche in dimensione infinita: se T rispetta la proprieta di cui
sopra, allora V si decompone come
V = V0 ⊕ · · · ⊕ Vk ⊕W1 ⊕ · · · ⊕Wm
in modo tale che T|Vi = id, T|Wisia una rotazione, e che dimVi = 1, dimWj = 2.
Piu in generale, se T n = 1, dimostrare che e possibile rappresentare T con una matricedella forma
Id−Id
R. . .
Rk
. . .Rn/2
in cui la parte −Id puo comparire solo se n e pari, e 1 ≤ k ≤ n
2
16.2.6 Rappresentazioni di C2 × C2
Sia G = C2×C2 = 1, (s, 1), (1, s), (s, s) = 1, σ, τ, στ con le leggi σ2 = τ 2 = 1, στ = τσe quindi (στ)2 = στστ = στ 2σ = σ2 = 1, in quanto σ, τ commutano.
Dare un rappresentazione di G significa trovare un omomorfismo ρ : G → GL(V )t.c. ρ(σ) = S, ρ(τ) = T , in cui S e T sono operatori tali che S2 = T 2 = Id, ST = TS.Viceversa, per ogni tale coppia di operatori esiste un’unica rappresentazione.
Per il teoremaFrigerioMartelli16.8 sappiamo che S e T si diagonalizzano contemporaneamente.
Inoltre, entrambi gli operatori possono avere solo ±1 come autovalori.Possiamo allora scrivere V = V1⊕V−1, in cui Vi e l’autospazio associato all’autovalore
i di S. Sempre per il teoremaFrigerioMartelli16.8, le restrizioni di T a Vi si diagonalizzano ancora, percio
possiamo scrivere ulteriormente
V = V1,1 ⊕ V1,−1 ⊕ V−1,1 ⊕ V−1,−1
in cui Vα,β = v ∈ V |Sv = αv, Tv = βv, ed ogni tale scomposizione fissa in modounico il comportamento di S, T su tutto lo spazio; in altri termini, le rappresentazioni delgruppo G sono in bigezione con le scomposizioni di V in somma diretta di 4 sottospazi,alcuni dei quali, eventualmente, vuoti.
98

carattere Definizione 16.14. Sia G un gruppo. Un carattere 1-dimensionale di G e un omo-morfismo χ : G→ C∗ = z ∈ C|z 6= 0, dove C∗ e considerato un gruppo moltiplicativo.
Osservazione 16.15. Osserviamo che C∗ ∼= GL1(C) ∼= GL(V ) con V spazio vettorialedi dimensione 1. L’isomorfismo, inoltre, e canonico, in quanto un’applicazione linearesu uno spazio di dimensione 1 e naturalmente identificata con lo scalare f(v)/v per unqualunque V 3 v 6= 0
Supponiamo ora di avere una rappresentazione ρ : G → GL(V ) ed un carattere χ :G→ C∗; possiamo considerare l’autospazio generalizzato associato a χ, ovvero l’insieme
Vχ = v ∈ V |∀s ρ(s)v = χ(s)vAnche se la definizione e ben posta, cerchiamo di fare un po’ di chiarezza. ρ(s) e un
operatore lineare sullo spazio V , dunque quello che stiamo richiedendo a v e di essereun autovettore per ogni operatore nell’immagine della rappresentazione di G; non solo,vogliamo anche che l’autovalore associato sia proprio χ(s), che essendo χ un carattererisulta essere un numero complesso non nullo (ogni operatore nell’immagine e comunqueiniettivo, dunque non potrebbe avere 0 come autovalore).
Esempio 16.16. Sia G ∼= Cn = 1, s, . . . , sn−1 il gruppo ciclico di ordine n, χ : G→ C∗un carattere.
Il carattere e completamente fissato dall’immagine del generatore s, in quanto G eciclico. Chiamiamo α tale immagine, α = ρ(s).
Si deve avere 1 = ρ(e) = ρ(sn) = ρ(s)n = αn, da cui α e una radice n-esima dell’unita;viceversa, per ogni radice n-esima dell’unita α ∈ µn esiste esattamente un carattere
χα : G→ C∗
tale che χα(s) = α, e conseguentemente χα(si) = αi. I caratteri, quindi, sono inbigezione con µn, ed in particolare sono esattamente n.
16.2.7 Decomposizione di uno spazio vettoriale e caratteri: casodel gruppo ciclico
Sia ρ : G ∼= Cn → GL(V ) una rappresentazione, T ∈ GL(V ) tale che T n = 1, e ρ(s) = T .Allora, come visto sopra, si ha la decomposizione
V = V0 ⊕ V1 ⊕ · · · ⊕ Vn−1 =⊕α∈µn
Vα
Vogliamo ora dare un significato intrinseco a questa decomposizione, evitando di doverscegliere un generatore per Cn. Studiamo l’insieme
Vχα = v ∈ V |∀s ρ(s)v = χα(s)v =v ∈ V |∀i ∈ N ρ(si)v = χα(si)v
Ora, e evidente che la condizione deve valere per i = 1, dunque deve in particolare
essere ρ(s)v = αv, ma una volta che questa condizione sia assicurata si trova automatica-mente anche ρ(si)v = ρ(s)iv = ρ(s) ρ(s) · · · ρ(s)v = αiv. Per questo motivo abbiamol’importante uguaglianza Vχα = Vα.
99

Combinando quest’ultima relazione con la decomposizione dello spazio in sommadiretta di autospazi troviamo
V =⊕
χ:G→C∗χ carattere
Vχ
che e una decomposizione di V totalmente indipendente dalla scelta del generatore diG.
Trailer delle prossime puntate: la formula appena scritta non vale solo per i gruppiciclici, ma per qualunque gruppo abeliano finito, ma la dimostrazione e rimandata alezioni successive.
100

Capitolo 17
Diciassettesima lezione (FilippoCallegaro, 01/12/2009)
17.1 Considerazioni sui gruppi O(n)
Sia O(n) il gruppo delle applicazioni lineari ortogonali su Rn. Indichiamo con (x, y) ilprodotto scalare fra due vettori x, y ∈ Rn. Dato un vettore v ∈ Rn, indichiamo con σvl’elemento di O(n) che soddisfa:
σv(x) =
−v se x = v
x se (x, v) = 0
Osserviamo che, per linearita, queste condizioni definiscono in modo univoco σv sututti gli elementi di Rn.
Dimostriamo il seguente risultato:
Teorema 17.1. Sia g ∈ O(n). Allora ∃v1, v2, . . . , vk ∈ Rn, con k intero minore o ugualea n, tali che g = σv1 σv2 · · · σvk .
Osservazione 17.2. Osserviamo che, supposta valida la tesi per lo spazio Rn, da questasegue immediatamente una tesi analoga per un qualunque spazio V di dimensione n: bastaapplicare l’isomorfismo fra V ed Rn che fa corrispondere ad una base di V la base canonicadi Rn.
Dimostrazione. Procediamo per induzione. L’enunciato e banalmente vero per n = 1:l’unico elemento di O(1) e l’identita, che possiamo vedere come composizione di 0 tra-sformazioni della forma indicata. Supponiamo la tesi valida per ogni n fra 1 e k − 1,dimostriamola per n = k. Sia g ∈ O(k). Distinguiamo due casi:
• g ha un sottospazio invariante V1, con 0 < h1 = dim(V1) < k; allora, detto V2 ilsottospazio ortogonale a V1, si ha Rk = V1 ⊕ V2. Anche V2 e invariante rispettoa g: siano infatti v1 ∈ V1 e v2 ∈ V2; essendo g ortogonale, si ha (g(v1), g(v2)) =(v1, v2) = 0, per cui g(v2) appartiene al sottospazio ortogonale a g(V1) = V1, ovveroa V2. Consideriamo quindi le restrizioni g1 e g2 di g ai sottospazi V1 e V2; poiche V1
e V2 hanno dimensione minore di k, possiamo applicare l’ipotesi induttiva (per viadell’osservazione 17.2), scrivendo g1 = σx1σx2· · ·σxh2
e g2 = σy1σy2· · ·σyh2, con
101

k1 ≤ h1 e k2 ≤ k−h1, σxi ∈ O(V1) e σyi ∈ O(V2). Indichiamo con Xi i vettori di Rkaventi xi come proiezione su V1 e 0 come proiezione su V2; analogamente indichiamocon Xi i vettori di Rk aventi 0 come proiezione su V1 e yi come proiezione su V2.Segue allora facilmente che g2 = σX1 σX2 · · · σXh2
σY1 σY2 · · · σYh2, con
h1 + h2 ≤ k, ovvero la tesi.
• g non ha sottospazi invarianti. Per ogni vettore v ∈ Rk si ha allora g(v) 6= ±v;in caso contrario, infatti, il sottospazio generato da v sarebbe invariante. Sia w =v − g(v); per definizione si ha σw(w) = −w. Osserviamo che (v + g(v), v − g(v)) =(v, v)− (g(v), g(v)) = 0 per l’ortogonalita di g; segue allora σw(g+g(v)) = v+g(v).Sfruttando la linearita di σw, da queste due relazioni segue σw(g(v)) = v. Questosignifica che l’applicazione σw g fissa l’elemento v e, per ortogonalit’a, lo spazio adesso ortogonale. Dal caso precedente segue pertanto che σw g si puo scrivere comeg = σv1 σv2 · · · σvh , con h < k (in quanto ci basta scomporre σw g nello spazioortogonale a v, di dimensione k − 1, dato che nello spazio generato da v σw g el’identita). Poiche σw e un’involuzione, segue che g = σw σv1 σv2 · · · σvh , conh+ 1 ≤ k, ovvero la tesi.
Dimostriamo ora un risultato che precisa la forma delle applicazioni σv sopra definitenel caso dello spazio H dei quaternioni, considerato come spazio vettoriale su R.
Teorema 17.3. Se v ∈ H, con |v| = 1, allora σv(w) = −vwv ∀w ∈ H.
Dimostrazione. Verifichiamo che l’applicazione σv sopra definita verifica le due condizioniche abbiamo imposto in precedenza:
• σv(v) = −vvv = −v, essendo |v| = 1⇒ vv = 1.
• σv(w) = w ⇔ −vwv = w ⇔ −vw = wv ⇔ vw + wv = 0. Osserviamo che la partenon reale di vw+wv = 0 e nulla: infatti barvw + wv = wv+vw; questo significa chevw+wv = 0 se e solo se e nulla la sua parte reale, ovvero, separando le componenti,2(v1w1 + viwi + vjwj + vkwk) = 0, equivalente a (v, w) = 0. Concludiamo percio che(v, w) = 0⇔ σv(w) = w, ovvero la seconda condizione su σv e verificata.
17.2 Studio del gruppo unitario SO(4)
Grazie all’isomorfismo standard fra R4 e H, possiamo identificare O(4) con O(H); inter-pretiamo quindi S3 = x ∈ R4||x| = 1 come x ∈ H||x| = 1. Definiamo due diverseazioni di S3 ⊂ H in O(4) w O(H):
Definizione 17.4. Indichiamo con Lu l’azione di gruppo di S3 in O(H) cosı definita:
S3 3 u→ Lu ∈ O(H) : ∀q ∈ H Lu(q) = uq
Indichiamo invece con Ru l’azione di gruppo di S3 in O(H) cosı definita:
102

S3 3 u→ Ru ∈ O(H) : ∀q ∈ H Ru(q) = qu
Ci riferiamo all’azione Lu con il nome di azione sinistra e all’azione Ru con il nomedi azione destra.
A partire dalle due azioni sopra definite, definiamo un’azione del gruppo S3×S3 (sulquale consideriamo la struttura di gruppo standard indotta sul prodotto) su O(H):
Definizione 17.5. Indichiamo con α l’azione cosı definita:
S3 × S3 3 (u, v)→ Lu Rv ∈ O(H)
Verifichiamo che α e ancora un’azione: α(u1, v1) ·α(u2, v2) = Lu1Rv1 ·Lu2Rv2 = Lu1u2 ·Rv1v2 = α(u1v1, u2v2). Osserviamo che Im(α) e un connesso, essendo S3×S3 connesso inquanto prodotto di connessi, e quindi la sua immagine mediante una funzione continuaconnessa. O(4) e dotato di due componenti connesse, SO(4) e O(4) − SO(4); poicheIdH = α(1, 1) ∈ Im(α), ovvero IdH ∈ SO(4) ∩ Im(α), essendo Im(α) connessa, segueIm(α) ⊆ SO(4).
Dimostriamo ora che α e suriettiva da S3×S3 in SO(4). Sia g ∈ SO(4); per il teorema17.1 possiamo scrivere g = σu1 σu2 σu3 σuh (i fattori sono sicuramente in numero pari,dato che ognuno di essi ha determinante negativo, ma il prodotto e in SO(4); nel casoi fattori siano solo zero o due, ci basta scegliere coppie della forma σv σ−v = Id).Sappiamo che, per ogni u, v ∈ H, σu(v) = −uvu; sostituendo nella fattorizzazione di gotteniamo percio, ∀q ∈ H, g(q) = (−1)4u1u2u3u4qu4u3u2u1. Definiti allora v = u1u2u3u4
e w = u4u3u2u1, si ha g = Lv Rw, ovvero g ∈ Im(α).Studiamo ora ker(α) cercando gli elementi (u, v) ∈ S3×S3 tali che αu,v(q) = q ∀q ∈ H.
Questa relazione equivale a uqv = q, ovvero a uq = qv, essendo v = v−1 poiche v ∈ S3. Perq = 1 la relazione ci da u = v; l’uguaglianza precedente equivale percio a uq = qu ∀q ∈ H,che e verificata se e solo se u appartiene al centro di S3, ovvero u = ±1. Concludiamo che(u, v) = (1, 1) ∨ (−1,−1), ovvero ker(α) = (1, 1), (−1,−1) ∼= Z2. Dal primo teoremadi omomorfismo segue allora SO(4) ∼= S3 × S3/ker(α) ∼= S3 × S3/Z2. Quest’ultimauguaglianza ha significato se consideriamo Z2 come sottogruppo di S3 × S3 attraversol’immersione diagonale 1→ (1, 1),−1→ (−1,−1).
17.3 Considerazioni sulle rappresentazioni di gruppi
Sia G un gruppo, V uno spazio vettoriale su C di dimensione finita. Sappiamo che unarappresentazione e un omomorfismo di gruppi ρ da G in GL(Vρ), dove abbiamo utiliz-zato la notazione Vρ per indicare che lo spazio vettoriale V e considerato rispetto allarappresentazione ρ. In particolare, se G e un gruppo topologico, richiederemo che ρ siacontinua. Considerate due rappresentazioni ρ : G → GL(Vρ), λ : G → GL(Wλ), diamoalcune definizioni:
Definizione 17.6. Indichiamo con ρ⊗ λ la rappresentazione di G in GL(Vρ ⊗Wλ) taleche ∀v ∈ V, ∀w ∈ W ρ⊗ λ(v ⊗ w) = ρg(v)⊗ λg(w).
Definizione 17.7. Indichiamo con ρ⊕ λ la rappresentazione di G in GL(Vρ ⊕Wλ) taleche ∀v ∈ V, ∀w ∈ W ρ⊕ λ(v ⊗ w) = (ρg(v), λg(w)).
103

Definizione 17.8. Indichiamo con ρ∗ la rappresentazione di G in GL(V ∗) tale che ∀ϕ ∈V ∗,∀v ∈ V ρ∗g(ϕ) = ϕ(ρg−1(v)).
Si puo verificare facilmente che le applicazioni indicate sono effettivamente rappresen-tazioni (mostrando che rispettano le proprieta di un omomorfismo).
A proposito degli spazi duali, ricordiamo che l’accoppiamento di dualita e la funzioneda V × V ∗ in C che associa alla coppia (v, ϕ) il valore < v, ϕ >= ϕ(v). In particolare,se ρ∗ e la rappresentazione definita sopra, vale la relazione < ρg(v), ϕ >=< v, ρ∗g−1(ϕ) >.Ricordiamo inoltre il seguente importante risultato, di cui omettiamo la dimostrazione(forse fatta a lezione?):
Teorema 17.9. Dati V,W spazi vettoriali di dimensione finita, Hom(V,W ) ∼= V ∗⊗W .
Dimostriamo, come esercizio, la seguente proposizione:
Esercizio 17.10. Sia ρ rappresentazione di un gruppo compatto G in GL(C) = Cn.Allora |ρ(g)| = 1 ∀g ∈ G.
Dimostrazione. Per la continuita di ρ, ρ(G) ⊂ C∗ e compatto. Supponiamo che esistag ∈ G tale che |ρ(g)| < 1. Allora |ρ(gn)| = |ρ(g)|n tenderebbe a +∞ al tendere di n a+∞, assurdo in quanto ρ(G) e compatto. Se esistesse invece g ∈ G tale che |ρ(g)| > 1,avremmo |ρ(g−1)| = |ρ(g)|−1 e possiamo ricondurci al caso precedente. Concludiamopercio che |ρ(g)| = 1 ∀g ∈ G.
104

Capitolo 18
Diciottesima lezione (Angelo Vistoli,02/12/2009)
18.1 Lemma 1
Sia Cn = s, . . . , sn−1 il gruppo ciclico di ordine n e sia ρ : Cn → V una rappresentazione.Sia T : V → V un’applicazione lineare tale che
T ρ(s) = ρ(s) T.
Allora, detto Vα l’autospazio di ρ(s) relativo all’autovalore α, T (Vα) ⊆ α ∀α autova-lore.
18.2 Esempio 1
Sia S=vertici di un n-agono regolare. Sia x : S → C. Indichiamo con xi, i=1..n, ilvalore di x sull’i-esimo punto. Sia inoltre T ∈ End(x : S → C) che agisce rimpiazzandociascun xi con la media dei valori di x sui due punti adiacenti. Ci proponiamo di capirecosa succede appplicando T infinite volte sfruttando le simmetrie del problema.
Sia V = Cn. Posso identificare x : S → C con V e considerare T : V → V lineare.Considero le simmetrie di rotazione: sia G = Cn il gruppo delle rotazioni di angolo 2kπ
n,
con k=0..n-1. Detta s la rotazione di 2πn
in verso antiorario, si ha C = 1, s, . . . , sn−1.G agisce su V con l’azione definita da
ρ(s)
x1...
xn−1
xn
=
x2...xnx1
Chiaramente T commuta con ρ(s). Per quanto dimostrato precedentemente si ha V =⊕
α∈µn Vα, dove i Vα sono gli autospazi di ρ(s).
105

Sia ρ(s)(x) = αx, x ∈ Cn. Allorax2...xnx1
=
αx1
...αxn − 1αxn
Da cio segue che Vα =
(t αt . . . αn−1t
)|t ∈ C = Span(
(1 α . . . αn−1
)) Sia
vα =
1α...
αn−1
. Si ha che T (Vα) ⊆ Vα, e dato che dimVα = 1, Vα e autospazio anche per
T.T (vα) = α+α−1
2vα = Re(α)vα, inoltre ∀α ∈ µn, −1 ≤ Reα ≤ 1.
Se |Reα| < 1, si ha T k(vα)→ 0 per k →∞.Se α = 1, T k(v1) = v1 ∀k.Se α = −1, T k(v−1) = (−1)kv−1.Sia n dispari. Allora -1 non e autovalore, quindi T k(vα)→ 0 per k →∞ ∀α ∈ µn\1.
Inoltre T k(v1) = v1 ∀k. Sia x ∈ Cn. Dato che i vα sono una base, si ha x =∑
α∈µn ξαvαcon ξα ∈ C opportuni. Per quanto detto prima,
T k(v)→ ξ1v1 =
ξ1...ξ1
.
Sia xi la i-esima componente di x nella base canonica e sia ω = e2πin . Si ha x = ξ1v1 +
ξωvω + · · ·+ ξωn−1vωn−1 . Allora ξ1 = x1+···+xnn
.Sia n pari. T 2k(x)→ ξ1v1 + ξ−1v−1 per k →∞.T 2k+1(x)→ ξ1v1 − ξ−1v−1 per k →∞.
18.3 Lemma 2
Sia G=C2 × C2=1, s, t, st, con s2 = t2 = 1, st=ts. Sia ρ : G → GL(V ) unarappresentazione. Allora V = V1,1 ⊕ V1,−1 ⊕ V−1,1 ⊕ V−1,−1.
Sia T : V → V un’applicazione lineare tale che Tρ(s) = ρ(s)T e Tρ(t) = ρ(t)T . AlloraT (Vi,j) ⊆ Vi,j ∀ i, j∈ 1, 2.
18.4 Esempio 2
Consideriamo una scacchiera 3x3. Sia Q l’insieme dei quadrati della scacchiera. Q =1, 2, 32. Sia x : Q → C e sia V = x : Q → C. Sia T applicazione lineare su V cheagisce rimpiazzando ciascuna xij con la media dei valori sui quadratini adiacenti.
Ad esempio T (x11) = x12+x22+x21
3; T (x12) = x11+x21+x22+x23+x13
5.
Come prima ci proponiamo di capire cosa succede iterando T infinite volte sfrut-tando le simmetrie del problema. Siano s e t le simmetrie lungo le congiungenti dei
106

punti medi rispettivamente dei lati verticali e orizzontali della scacchiera. Chiaramentest=ts=simmetria rispetto al centro della scacchiera. Sia G=1, s, t, st. Sia inoltre Vijcome in precedenza. Da verifica diretta si ottiene
V1,1 =
a b ac d ca b a
|a, b, c, d ∈ C
V1,−1 =
a 0 -ab 0 -ba 0 -a
|a, b ∈ C
V−1,1 =
a b a0 0 0-a -b -a
|a, b ∈ C
V−1,−1 =
a 0 -a0 0 0-a 0 a
|a, b ∈ C
.
Dato che T commuta con s e t, gli autospazi Vi,j sono T invarianti. Considero pertantole restrizioni di T a ciascuno di questi autospazi.
18.4.1 V−1,−1
Si ha che T |V−1,−1 = 0.
18.4.2 V1,−1
Considero T |V1,−1 .Posso far agire T direttamente su a e b. Si ha che T (a) = b
3; T (b) = 2a
5.
Quindi T 2
(ab
)= 2
15
(ab
), e si ha pertanto T n
(ab
)→ 0 per n→∞.
Pertanto T n|V1,−1 → 0 per n→∞.
18.4.3 V−1,1
Si procede come per V1,−1 e si ottiene T n|V−1,1 → 0 per n→∞.
18.4.4 V1,1
C’e un’ulteriore simmetria di V1,1, infatti sia R la rotazione di π2
in verso antiorario. Siha che V1,1 e R invariante e R commuta con T.
Si ha V1,1 = W ⊕W ′, dove W = x ∈ V1,1|Rx = x, W ′ = x ∈ V1,1|Rx = −x.Da verifica diretta si ottiene che
W ′ =
0 b 0-b 0 -b0 b 0
|b ∈ C
107

W =
a b ab c ba b a
|a, b, c ∈ C
.
Si ha che T |W ′ = −25IdW ′ , pertanto T n|W ′ → 0 per n → ∞. Su W posso far agire T
direttamente su a, b, c. Si ha
T
abc
=
2b+c3
2a+2b+c5a+b
2
. La matrice di T che agisce su a, b, c e
T =
0 23
13
25
25
15
12
12
0
Si verifica che gli autovalori di T sono 1, λ1, λ2 con
λ1,2 =−9±
√21
30
Gli autovalori sono distinti, quindi T e diagonalizzabile su W con autospazi di dimensioneuno, si ha W = W1 ⊕Wλ1 ⊕Wλ2 , e dato che |λi| < 1 per i=1, 2 si ha che T n|Wλi → 0per n→∞ e i=1, 2.
Dato che W1 = Span(
1 1 11 1 11 1 1
), si ha che
T n(v)→ L(v) = k(v)
1 1 11 1 11 1 1
per n→∞ con k(v) ∈ C, dove k(v) e la componente lungo W1 di v.
108
Capitolo 19
Diciannovesima lezione (AngeloVistoli, 09/12/2009)
19.1 Omomorfismi di rappresentazioni
Definizione 19.1. Sia G un gruppo e siano ρ : G → GL(Vρ) e σ : G → GL(Vσ) duerappresentazioni di G. Un omomorfismo di rappresentazioni tra ρ e σ e una funzionelineare F : Vρ → Vσ tale che ∀s ∈ G si ha F ρ(s) = σ(s) F .
Esempio 19.2. Sia G e un gruppo ciclico di ordine n e siano ρ : G → GL(Vρ) eσ : G → GL(Vσ) due sue rappresentazioni. Abbiamo dimostrato che Vρ =
⊕α∈µn(Vρ)α
e Vσ =⊕
α∈µn(Vσ)α, dove le somme sono estese a tutti gli autospazi e µn e l’insiemedelle radici n-esime dell’unita. In questo caso, una funzione lineare F : Vρ −→ Vσ e unomomorfismo di rappresentazioni tra ρ e σ se e solo se per ogni α ∈ µn si ha:
F ((Vρ)α) ⊆ ((Vσ)α)
Dimostrazione. Se F e un omomorfismo di rappresentazione e v ∈ (Vρ)α allora F (ρ(s)(v)) =σ(s)(F (v)) e F (ρ(s)(v)) = F (αv) = αF (v) e quindi F (v) ∈ (Vσ)α.Viceversa sia
F ((Vρ)α) ⊆ ((Vσ)α) ∀α ∈ µne sia B = (v1, ..., vn) una base di Vρ di autovettori per ogni ρ(s) (per dimostrare che esiste,e sufficiente considerare una base di autovettori per ρ(s0) dove s0 e un generatore di G).Preso un vettore vi ∈ B ∩ (Vρ)α si ha che σ(s)(F (v)) = αF (v) e F (ρ(s)(v)) = F (αv) =αF (v). Quindi F si comporta come un omomorfismo di rappresentazione sui vettori diuna base di Vρ ed e quindi un omomorfismo di rappresentazione.
19.2 Rappresentazioni isomorfe
Definizione 19.3. Due rappresentazioni si dicono isomorfe quando esiste un isomorfismotra gli spazi vettoriali Vρ e Vσ che e anche un omomorfismo di rappresentazioni.
Esiste una relazione di equivalenza naturale tra le rappresentazioni di G: diciamo cheρ ≈ σ se ρ e isomorfa a σ. Come si verifica facilmente tale relazione e una relazione diequivalenza, infatti:
109
1. ρ ≈ ρ perche idVρ e ovviamente un isomorfismo di rappresentazioni.
2. Se ρ ≈ σ allora σ ≈ ρ. Infatti se F : Vρ −→ Vσ e un isomorfismo di rappresentazioni,e facile mostrare che F−1 e ancora un isomorfismo di rappresentazioni.
3. Se ρ ≈ σ e σ ≈ τ , allora ρ ≈ τ . E facile mostrare che se F e un isomorfismo dirappresentazioni tra ρ e σ e G e un isomorfismo di rappresentazioni tra σ e τ , alloraG F e un isomorfismo di rappresentazioni tra ρ e τ .
19.3 Grado di una rappresentazione
Definizione 19.4. Si definisce grado di una rappresentazione ρ : G → GL(Vρ) ladimensione dello spazio Vρ.
Ovviamente rappresentazioni isomorfe hanno lo stesso grado.
Esempio 19.5 (Rappresentazioni di grado 1). Se dim(Vρ) = 1 il gruppo GL(C) e cano-nicamente isomorfo a C∗ (in quanto applicare una funzione di GL(Vρ) ad un elementodi Vρ equivale a moltiplicarlo per uno scalare), quindi se ρ e σ hanno grado 1 esse sonoisomorfe se e solo se corrispondono alla stessa funzione da G→ C∗.
19.4 Sottospazio degli omomorfismi di rappresenta-
zioni
Definizione 19.6. Siano ρ, σ rappresentazioni di G. L’insieme Hom(ρ, σ) e l’insiemedegli omomorfismi di rappresentazione tra ρ e σ.
Hom(ρ, σ) e evidentemente un sottospazio vettoriale di Hom(Vρ, Vσ).
Esempio 19.7 (Rappresentazioni di grado 1). Se degρ = degσ = 1 allora dim(Hom(ρ, σ)) =1 se ρ ≈ σ e 0 altrimenti. Infatti se ρ e σ sono isomorfi la dimensione e 1 (perche e pre-sente un isomorfismo e non puo essere maggiore di dim(Hom(Vρ, Vσ))), se non lo sonodeve essere minore di dim(Hom(Vρ, Vσ)).
19.5 Vettori invarianti
Definizione 19.8. Sia ρ : G → GL(Vρ) una rappresentazione e v ∈ Vρ. Si dice che v eun vettore invariante se ρ(s)(v) = v per ogni s ∈ G. L’insieme dei vettori invarianti eindicato con V G
ρ ed e un sottospazio vettoriale di Vρ.
Esempio 19.9 (Caratterizzazione di Hom(1, ρ)). Sia 1 : G→ C∗ il carattere che assegna1 ad ogni elemento di G; lo confondiamo con ogni rappresentazione di grado 1 che mandaogni elemento di G nell’identita sullo spazio vettoriale di arrivo. Sia ρ : G→ GL(Vρ) unarappresentazione.Notiamo che i vettori di Vρ sono in corrispondenza biunivoca naturale con le funzionilineari da C a Vρ: ad ogni v ∈ Vρ associamo la funzione fv : C → Vρ tale che fv(1) = v,
110

e la corrispondenza e chiaramente biunivoca.Poiche si ha Hom(1, ρ) ⊆ Hom(C∗, Vρ) possiamo caratterizzare Hom(1, ρ) determinandoquali funzioni fv : C→ Vρ si trovano in Hom(1, ρ). Si ha:
fv ∈ Hom(1, ρ)⇐⇒ fv(1(s)(a)) = ρ(s)(fv(a)) ∀s ∈ G ∀a ∈ C
av = ρ(s)(av) = aρ(s)(v)
ρ(s)(v) = v ∀s ∈ G
Percio Hom(1, ρ) contiene tutte e sole le funzioni fv con v vettore invariante.
19.6 Decomposizione di gruppi abeliani finiti.
Teorema 19.10 (Decomposizione di gruppi abeliani finiti). Sia G un gruppo abelianofinito e V un C-spazio vettoriale di dimensione finita. Sia ρ : G −→ GL(V ) una rap-presentazione. Per ogni carattere 1-dimensionale χ : G −→ C∗ definiamo l’autospaziogeneralizzato come nel caso di gruppi ciclici: Vχ = v ∈ V : ρ(s)(v) = χ(s)v ∀s ∈ G.Allora si ha che V =
⊕χ∈Hom(G;C∗) Vχ.
Dimostrazione. Poiche G e finito, per ogni s ∈ G esiste n ∈ N tale che ρ(s)n = idV equindi ρ(s) e diagonalizzabile. Inoltre, dato che G e abeliano, e facile vedere che per ognis e t in G si ha ρ(s)ρ(t) = ρ(t)ρ(s). Percio i ρ(s) sono tutti diagonalizzabili e commutanoa due a due. Esiste quindi una base B = (v1, ..., vn) di V di autovettori per ogni ρ(s).Definiamo le n funzioni χi : G→ C∗ in modo che valga ρ(s)(vi) = χi(s)vi per ogni s ∈ G(si e scelto C∗ come codominio in quanto i ρ(s), essendo invertibili, non possono avere 0come autovalore). A questo punto e facile vedere che, se i χi cosı definiti fossero i caratteridi G, avremmo V =
⊕χ∈Hom(G;C∗) Vχ.
Dimostriamo che χi e un carattere per ogni i = 1, . . . , n. Si ha per ogni s, t ∈ G:
χi(st)vi = ρ(st)vi = ρ(s)ρ(t)vi = ρ(s)(χi(t)vi) = χi(t)ρ(s)vi = χi(t)χi(s)vi
χi(ts)vi = · · · = χi(s)χi(t)vi
Usando quindi che il gruppo e abeliano e che i vi sono non nulli, si ha che χi(t)χi(s) =χi(s)χi(t). Quindi i χi sono omomorfismi e quindi sono caratteri, ed e facile vedere chesono gli unici caratteri aventi autospazio generalizzato con dimensione maggiore di 0.
111

112

Capitolo 20
Ventesima lezione (FilippoCallegaro, 15/12/2009)
20.1 Rappresentazioni di un gruppo
Definizione 20.1. Una rappresentazione di un gruppo G e una funzione ρ : G→ GL(V )dove V e uno spazio vettoriale qualunque.
Studieremo in questo capitolo le rappresentazioni complesse finite (cioe in cui V e unospazio vettoriale complesso di dimensione finita). Inoltre, chiederemo che la funzione ρ siacontinua, altrimenti dovremmo considerare rappresentazioni molto complicate. Possiamovedere il gruppo G come un gruppo di matrici per il teorema di Cayley.
Definizione 20.2. Un carattere χ uni-dimensionale e un qualunque omomorfismo da Gin C∗.
D’ora in poi, fissato un gruppo G, denoteremo con Vρ lo spazio V su cui agisce larappresentazione ρ.
20.1.1 Altre definizioni
Date due rappresentazioni Vρ e Wλ, si puo definire:
Definizione 20.3.ρ⊗ λ : G→ GL(Vρ ⊗Wλ)
Dove (ρ⊗ λ)(g)(v ⊗ w) = ρ(g)(v)⊗ λ(g)(w)
Definizione 20.4.ρ+ λ : G→ GL(Vρ ⊕Wλ)
Dove (ρ+ λ)(g)(v, w) = (ρ(g)(v), λ(g)(w))
Definizione 20.5.ρ∗ : G→ GL(V ∗)
Dove ρ∗(g)(ϕ)(v) = ϕ(ρg−1(v)). Denoteremo ρ∗g(ϕ) := ρ∗(g)(ϕ)
113

Osservazione 20.6. In quest’ultima definizione l’inverso e necessario perche voglio che(ρ∗g1
ρ∗g2)(ϕ) = ρ∗g1g2
(ϕ), che avviene perche (ρ∗g1ρ∗g2
)(ϕ)(v) = ϕ(ρg−12ρg−1
1(v)) = ϕ(ρg−1
2 g−11
(v)) =
ρ∗g1g2(ϕ)(v). Senza l’inverso cio non era possibile.
Osservazione 20.7. In dimensione finita, vale che Hom(V,W ) ∼= V ∗ ⊗W .
20.2 Rappresentazioni uni-dimensionali complesse
In questo paragrafo verranno studiare le rappresentazioni uni-dimensionali complesse.D’ora in poi, le seguenti notazioni saranno equivalenti:
ρ(g)(w) = ρg(w) = gw
Proposizione 20.8. Sia G un gruppo compatto e ρ una rappresentazione da G in GL(C) ∼=C∗. Allora l’immagine di ρ e inclusa nella circonferenza di raggio unitario.
Dimostrazione. Dato che la rappresentazione e continua, l’immagine di un compatto ecompatta, quindi ρ(G) e compatto e di conseguenza limitato. Se, per assurdo, |ρ(g)| > 1,allora |ρ(gn)| = |ρ(g)n| = |ρ(g)|n e illimitato, se invece |ρ(g)| < 1, |ρ(g−1)| > 1 e possoripetere il ragionamento precedente. Ho dedotto un assurdo, quindi l’immagine di ρ einclusa nella circonferenza di raggio 1.
Definizione 20.9. Una rappresentazione e semplice se non ha sottospazi G-invarianti(cioe @W ⊆ V sottospazio non banale tale che ρg(w) ∈ W∀g ∈ G,∀w ∈ W .
Definizione 20.10. Una rappresentazione e semisemplice se e somma diretta di rappre-sentazioni semplici.
Non tutte le rappresentazioni sono semisemplici, ad esempio si potrebbe scegliere
G = R e ρ : R → GL(2,C) tale che ρ(t) =
[1 t0 1
]. Questa rappresentazione ha
dimensione 2 e non e semisemplice, perche se fosse somma diretta di rappresentazionisemplici, la matrice ρ(t) sarebbe sempre diagonalizzabile (e tutte le diagonalizzazioniavrebbero la stessa base).
20.3 Rappresentazioni di S1 ⊂ C∗
Per studiare le rappresentazioni di S1, innanzi tutto ci ricondurremo alle rappresenta-zioni monodimensionali, dimostrando che tutte le matrici ρg sono diagonalizzabili con-temporaneamente. Infine studieremo le rappresentazioni monodimensionali di S1 (cioe gliendomorfismi di S1).
Proposizione 20.11. ∀g ∈ S1, ∀ρ : S1 → GL(n,C), ρ(g) e diagonalizzabile.
Dimostrazione. So che S1 e compatto, quindi la sua immagine secondo una rappresen-tazione continua e compatta. In questo caso, l’immagine di S1 e un insieme di matricinxn compatto, quindi limitato secondo una qualunque norma matriciale. Supponiamo
114

che ρg non sia diagonalizzabile per qualche g. Allora posso scrivere la matrice ρg in formacanonica di Jordan con almeno un blocco del tipo:
J =
λ 1 · · · 0
0 λ. . .
......
.... . . 1
0 0 · · · λ
Allora
Jn =
λn nλn−1 · · · ∗0 λn
. . ....
......
. . . nλn−1
0 0 · · · λn
il che e assurdo per compattezza.
Ora vogliamo generalizzare il teorema:
Teorema 20.12. Siano A e B ∈ GL(V ) diagonalizzabili e tali che [A,B] := AB−BA = 0(cioe A e B commutano). Allora sono diagonalizzabili su una stessa base.
Dimostrazione. Gia visto
Ovvero affermiamo che:
Teorema 20.13. Siano Ai, i ∈ I ⊂ GL(V ) matrici diagonalizzabili e tali che [Ai, Aj] = 0.Allora tutte le Ai sono diagonalizzabili su una stessa base.
Dimostrazione. Induzione sulla dimensione n dello spazio V.Passo base: tutte le matrici 1x1 sono diagonali.Passo induttivo: voglio dimostrare che esiste un sottospazio W non banale invariante
per ognuna delle matrici Ai. Se nessuna matrice ha un autospazio diverso dall’intero V,allora le matrici sono tutte multiple dell’identita (cioe sono diagonali su qualunque base).Altrimenti, sia Wi autospazio relativo al valore λ della matrice Ai. Allora Ai(Aj(w)) =Aj(Ai(w)) = Aj(λw) = λAj(w). In altre parole il sottospazio Aj(w) e autovettore di Aicon autovalore λ, cioe Aj(w) ∈ W∀j. Allora posso scomporre V = ⊕lk=1Wλk dove Wλk el’autospazio della matrice Ai relativo all’autovalore λk e questi sottospazi sono invariantiper ognuna delle matrici Aj. Per ipotesi induttiva, posso trovare una base in cui tuttele applicazioni Ai ristrette a questi autospazi sono diagonali. Allora l’intera matrice ediagonalizzabile e il passo induttivo e concluso.
Sia ora πi la proiezione canonica sull’i-esima componente e si consideri il seguentediagramma:
Cij→ Cn ρ(eiθ)→ Cn → C
Questa e una rappresentazione uni-dimensionale da S1 in S1 e n di queste rappresen-tazioni definiscono una rappresentazione da S1 in Cn.
115

20.3.1 Rappresentazioni di S1 in GL(C)
Dato che S1 ∼= R/Z, posso studiare gli omomorfismi ϕ da R in S1 e poi fare il quoziente.
Lemma 20.14. Se ϕ : R → S1 e un omomorfismo in cui gli elementi del nucleo siaccumulano in 0, allora e nullo.
Dimostrazione. Se a ∈ ker(ϕ) allora Za ∈ ker(ϕ) perche ρ e un omomorfismo. Sia an unqualsiasi elemento del nucleo di modulo (in R) minore di 1
ne Z =
⋃∞i=1 Zan. Chiaramente
Z ⊂ ker(ϕ) e Z e denso. Dato che una funzione continua definita su un denso si estendein modo unico a tutto l’insieme, non resta che concludere che ϕ e la rappresentazionenulla.
Abbiamo quindi dimostrato che la rappresentazione e nulla oppure esiste a minimodi ker(ρ) − 0 = Za, altrimenti con la divisione euclidea posso trovare un elementominore di a nel nucleo. Inoltre, se voglio che ϕ induca un’applicazione al quoziente,devo avere che Z ⊂ ker(ϕ), quindi a = 1
n. Per il primo teorema di omomorfismo, ho
che R/ker(ϕ) ∼= Im(ϕ), cioe l’applicazione ϕ ristretta a R/aZ e un isomorfismo. Infine,R/aZ ∼= R/Z (isomorfismo: moltiplicazione per frac1a). Il seguente lemma ci permetteraquindi di concludere:
Lemma 20.15. Gli unici automorfismi continui di R/Z sono l’identita e la moltiplica-zione per -1.
Dimostrazione. E’ sufficiente dimostrare che la tesi vale per un denso. Dato che 12
e l’unicoelemento di ordine 2, ϕ(1
2) = 1
2. Analogamente, ϕ(1
4) = ±1
4(unici elementi di ordine 4).
Voglio dimostrare che se ϕ(14) = 1
4, ϕ(3
4) = 3
4allora ϕ e l’identita: dimostro induttivamente
che ϕ(2−n) = 2−n. Il passo base e vero per ipotesi, per il passo induttivo posso assumereche ϕ fissa 2−n e dato che la funzione e continua, l’immagine del connesso [0, 2−n] econnessa. Inoltre, −2−n non vi appartiene (viene anch’esso fissato da ϕ). L’immaginedi [0, 2n] deve includere pertanto [0, 2−n], altrimenti non sarebbe connessa. Posso fare undiscorso analogo con ϕ−1 e dimostrare che ϕ fissa [0, 2−n]. Ma allora, per ragioni di ordine,ϕ fissa anche 2−(n+1), che e l’unico elemento di ordine 2n+1 in questo intervallo. Il passoinduttivo e completato.
A questo punto, per linearita posso affermare che ϕ fissa tutti i numeri della forma m2n
,che formano un denso su cui la funzione e l’identita. Allora la funzione e l’identita. Restada analizzare il caso in cui ϕ(1
4) = 3
4: l’unica possibilita e che ϕ sia la moltiplicazione per
−1, perche se ci fosse un altro isomorfismo ϕ′ avrei che −ϕ′ e un automorfismo diversodall’identita che fissa 1
4, il che e impossibile per quanto dimostrato precedentemente.
Come conseguenza del lemma, le uniche possibili rappresentazioni di dimensione 1 inS1 mandano eiθ 7−→ ekiθ, k ∈ Z, perche il ker della rappresentazione e formato dalle radicin-esime dell’unita (immagini di 1/n nell’isomorfismo tra R/Z e S1) e ρ ristretto all’arcocompreso tra 0 ed einθ e un isomorfismo tra quest’ultimo e S1.
20.4 Conclusioni ed esercizi
Sia ρ una rappresentazione di S1 in GL(n,C). Allora ρ e somma diretta di rappresenta-zioni semplici Ci come precedentemente dimostrato (basta scegliere la base in cui tutte le
116
matrici Ai sono diagonali). Dato che ρ =∑n
i=1 niCi con ni ∈ N, allora Vρ = ⊕VCi , doveCi sono le rappresentazioni semplici in cui e stato scomposto ρ contate con eventualemolteplicita.
Esercizio 20.16. Sia Vρ rappresentazione di S1. Come e fatta la traccia di ρ(θ)?
tr(ρ(θ)) =∑j∈Z
nje2πiθj
con nj dmensione del sottospazio in cui ρ agisce come moltiplicazione per e2πiθj. Questoe un Polinomio di Laurent (ovvero, nel quale sono ammessi anche esponenti negativi) acoefficienti interi (le dimensioni degli autospazi, appunto), valutato in e2πiθ.
Esercizio 20.17. Dimostrare che:
tr(ρ(θ)) + tr(λ(θ)) = tr((ρ⊕ λ)(θ))
tr(ρ(θ)) ∗ tr(λ(θ)) = tr((ρ⊗ λ)(θ))
Suggerimento: se (V1⊕V2)⊗(W1⊕W2) = (V1⊗W1)⊕(V1⊗W2)⊕(V2⊗W1)⊕V2(⊗W2),quindi posso costruire polinomi con somme dirette e prodotti tensoriali.
Esercizio 20.18. Data una rappresentazione ρ, posso calcolare i coefficienti nj con laformula:
nj =
∫0
1 tr(ρ(θ))e−2πiθjdθ.
Esercizio 20.19. Come sono fatte le rappresentazioni di gruppi della forma (S1)m ×Zn1 × Zn2 · · · × Znk?
117

118

Capitolo 21
Ventunesima lezione (FilippoCallegaro, 16/12/2009)
21.1 Rappresentazioni reali di S1
Le rappresentazioni reali di S1 sono un po’ piu complesse da descrivere di quelle complesse,perche, in generale, le matrici reali non hanno tutti gli autovalori nel campi (il polinomiominimo non si puo scomporre in fattori lineari).
Cominciamo con l’analizzare i due casi piu semplici: le rappresentazioni di dimensioneuno e due.
Nel primo caso, GL(R) ∼= R∗: poiche S1 e connesso (ricordiamo che, in questo momen-to, stiamo cercando rappresentazioni continue), l’immagine della rappresentazione deveessere connessa, ossia deve stare in R+. Inoltre, poiche S1 e compatto, tutti gli elementidell’immagine devono avere norma 1 (abbiamo dimostrato la scorsa lezione questo fatto).Da queste considerazioni segue che l’unica rappresentazione possibile e quella banale (chemanda tutto S1 nell’identita).
Nel caso delle rappresentazioni di dimensione due, possiamo ragionare come segue:cerchiamo gli omomorfismi continui ρ da S1 a GL(R2). Consideriamo inizialmente GL(R2)come sottogruppo di GL(C2). In tal caso, a meno di un cambiamento di base, ρ e deltipo:
S1 3 θ 7→(eiπnθ 0
0 eiπmθ
), (21.1) rappresentazione-s1-due-reale
per certi n e m. Tuttavia, poiche ρ(θ) e una matrice reale (prima del cambiamento dibase), il suo polinomio caratteristico deve essere reale, dunque m = −n. Ma allora ρ(θ)si puo anche scrivere come matrice di rotazione(
cos(nθ) − sin(nθ)sin(nθ) cos(nθ)
),
perche tale matrice ha proprio (rappresentazione-s1-due-reale21.1) come forma di Jordan complessa.
Osservazione 21.1. Ovviamente avrmmo potuto equivalentemente scrivere la matrice dirotazione associata a ρ(θ) in questo modo:
cos(nθ) − sin(nθ)sin(nθ) cos(nθ)
.
119

Vale la pena notare che queste due scritture sono equivalenti se stiamo considerandorappresentazioni in GL(R2) (come in questo caso) o in O(2), mentre non lo sono seconsideriamo rappresentazione in SO(2). Infatti, la matrice di cambiamento di base chemanda l’una nell’altra (scambiando i due vettori della base) ha determinante −1.
La nozione di “equivalenza” tra rappresentazioni sara accennata piu avanti in questalezione, e trattata piu approfonditamente nel corso.
Esercizio 21.2. Descrivere le rappresentazioni di S1 in dimensione piu alta, consi-derando il polinomio caratteristico della rappresentazione e ricordando che un fattoreirriducibile du R puo avere grado al massimo 2.
21.2 Varie sulle rappresentazioni
Osservazione 21.3. Dati V e W spazi vettoriali finiti, lo spazio Hom(V,W ) e cano-nicamente isomorfo a V ∗ ⊗W . L’isomorfismo si ottiene mandando v∗ ⊗ w ∈ V ∗ ⊗Wnell’omomorfismo ϕ : V → W tale che ϕ(u) = v∗(u) · w.
Osservazione 21.4. Siano Vρ e Wλ due rappresentazioni dello stesso gruppo G. Allorapossiamo costruire (in modo canonico) una rappresentazione di G sullo spazio Hom(V,W ),che chiameremo Hom(Vρ,Wλ).
Dobbiamo trovare un’azione di G nel gruppo lineare di Hom(V,W ). Costruiamo que-st’azione cosı: preso ϕ ∈ Hom(V,W ) e g ∈ G, diciamo che gϕ e l’omomorfismo che mandav ∈ Vλ:
(g · ϕ)(v) = g · ϕ(g−1 · v) = λ(g)[ϕ(ρ(g−1)(v))].
Poiche la formula non e banale da interpretare, aggiungiamo qualche chiarimento aparole: sappiamo gia che G agisce sia su V che su W , e che le azioni sono rispettivamenteρ e λ. Vale a dire, che, preso g ∈ G, ρ(g) e un automorfismo di V e λ(g) un automorfismodi W . Allora gϕ e la composizione di ρ(g), ϕ e λ(g−1).
Consideriamo ora i punti fissi dell’azione di G su Hom(Vρ,Wλ), ossia l’insieme
HomG(Vρ,Wλ) = ϕ ∈ Hom(Vρ,Wλ) | g · ϕ = ϕ ∀g ∈ G. (21.2) hom-g
E piuttosto evidente che:
Osservazione 21.5. Nelle stesse ipotesi di prima, l’insieme appena costruito e un grupporispetto all’addizione tra omomorfismi.
21.2.1 Rappresentazioni equivalenti ed unitarie
Definizione 21.6. Due rappresentazioni del gruppo G, Vρ e Wλ sono dette equivalentise esiste un elemento ϕ di HomG(Vρ,Wλ) che sia isomorfismo di spazi vettoriali.
Se V = W , questo vuol dire che due rappresentazioni sono equivalenti se esiste unaA ∈ GL(V ) tale che Aρ(g)A−1 = λ(g) ∀g ∈ G.
In alcuni casi posso considerare nozioni di equivalenza piu stringenti, a seconda delleproprieta che mi interessa studiare. Per esempio, posso chiedere che la matrice A siaunitaria ed abbia determinante 1.
120

Definizione 21.7. Una rappresentazione Vρ del gruppo G e detta unitaria se G conservaun prodotto scalare definito positivo su V , vale a dire se esiste un prodotto scalare 〈, 〉 :V × V → K definito positivo tale che:
〈v, w〉 = 〈g · v, g · w〉 ∀v, w ∈ V, g ∈ G.
In tal caso, l’immagine di ρ sta interamente nel gruppo U(n), dove n e la dimensionedi V .
Esercizio 21.8. Caratterizzare le rappresentazioni complesse di dimensione finita delgruppo:
G =(S1)k × Zn1 × · · · × Znh.
Come traccia per la risoluzione dell’esercizio, si puo procedere in maniera analoga aquanto gia fatto per le rappresentazioni di S1.
• Dimostrare che, poiche G e abeliano, le rappresentazioni sono diagonalizzabili.
• Dimostrare che le rappresentazioni irriducibili hanno dimensione 1.
• Continuare e concludere in maniera analoga.
21.3 Integrali su gruppi topologici
Supponiamo di avere uno spazio topologico X. Indichiamo con il simbolo CC(X) l’insiemedelle funzioni continue da X in R a supporto compatto. Esso e, chiaramente, uno spaziovettoriale e ci permette di definire una forma generalizzata di integrale.
Definizione 21.9. Un integrale e una funzione lineare∫
: CC(X)→ R monotona, ossiatale che, se f ≤ g, allora
∫f ≤
∫g.
Esempio 21.10. Fissato x ∈ X, la funzione che ad ogni elemento di CC(X) assegna ilsuo valori in x (funzione di valutazione) e un integrale (non particolarmente intelligente).
Supponiamo ora che X sia compatto: in tal caso la funzione 1 : X → R che assumecostantemente il valore 1 sta in CC(X). Possiamo dunque aggiungere delle ipotesi alnostro integrale:
Definizione 21.11. Se X e compatto, diremo che l’integrale∫
e normalizzato se∫1 = 1.
Nel caso in cui, al posto di X, abbiamo un gruppo topologico G, possiamo anchedefinire un’altra utile proprieta dell’integrale. Consideriamo le funzione, che abbiamo giavisto, di traslazione a sinistra lg e di traslazione a destra rg per un certo elemento g ∈ G: Tipograficamente orrendo
lg : G → G
h 7→ gh,
rg : G → G
h 7→ hg.
121

Definizione 21.12. Un integrale su un gruppo topologico G e invariante per traslazionia sinistra se, per ogni f ∈ CC(G) e per ogni g ∈ G,∫
f =
∫f lg.
Analogamente si definisce anche l’integrale invariante per traslazioni a destra. Dalmomento che G, in generale, non e commutativo, un integrale puo essere invariante adestra, ma non a sinistra, e viceversa. Chiaramente, invece, la distinzione cade se G eabeliano.
Esempio 21.13. L’integrale di Riemann su S1 ∼= R/Z e un integrale normalizzato edinvariante per traslazioni.
Si puo ottenere il seguente risultato (che pero non sara dimostrato in questo corso):
Teorema 21.14. Sia G un gruppo topologico localmente compatto (ossia tale che ogni suopunto ha un sistema fondamentale di intorni compatti). Allora su G esiste un integraleinvariante a sinistra (detto integrale di Haar), e tale integrale e unico a meno di unamoltiplicazione per scalare.A lezione e stata presentata
la misura di Haar, ma nonvoglio mettermi a fare di-stinzioni tra integrali e mi-sure. Spero cha vada beneanche cosı
Osservazione 21.15. Se G e anche compatto, allora 1 e una funzione continua a sup-porto compatto, dunque l’integrale si puo normalizzare (dividendolo per l’integrale di1).
21.4 Esercizi
Esercizio 21.16. Dimostrare che, se G e un gruppo topologico compatto, allora un inte-grale normalizzato invariante per traslazioni a sinistra e anche invariante per traslazionia destra.
Esercizio 21.17. Dimostrare che, se G e un gruppo topologico compatto, allora ogni suarappresentazione e unitaria.
Esercizio 21.18. Dimostrare che le rappresentazioni standard di SU(n), U(n) e GL(n)du Cn sono irriducibili (dove per rappresentazioni standard si indicano le identita).
Esercizio 21.19. Sia G un gruppo e H un suo sottogruppo. Sia V uno spazio vettorialee si consideri un’azione di G su V . Chiamiamo:
V H = v ∈ V | h · v = v ∀h ∈ H.
Dimostrare allora che, se V e W sono rappresentazioni di G = (S1)n
reali tali chedimV H = dimWH per ogni H < G, allora V e W sono rappresentazioni equivalenti.
122
Capitolo 22
Ventiduesima lezione (FilippoCallegaro, 23/02/2009)
22.1 Nota
Soprattutto per l’esercizio, abbiate cautela nel leggere che sto ancora sistemando, iocomincio a darvi questo.
22.2 Richiami e notazioni
SiaG un gruppo finito, di cardinalita n, e V = (K)n. Abbiamo visto come sia possibile fareagire G su se stesso tramite moltiplicazione a sinistra, ottenendo cosı una permutazionedel gruppo. In questo modo, G si comporta come Sn. Se facciamo agire il nostro gruppo Gsullo spazio V , otteniamo che ogni elemento del gruppo corrisponde ad una permutazionedei vettori della base dello spazio, ossia che la matrice associata ad ogni elemento g e unamatrice di permutazione. Se all’elemnto g e associata la permutazione σ, abbiamo che lamatrice rappresentativa di g sara composta da tutti zeri, e avra 1 nelle caselle del tipo(i, σ(i)).
Definizione 22.1. Una rappresentazione ρ : G→ GL(V ) si dice semplice o irriducibilese lo spazio V non possiede sottospazi invarianti non banali.
22.3 Riscaldamento per il grande salto
22.3.1 First step - Rappresentazioni di S1
Abbiamo visto come le rappresentazioni complesse di S1 siano del tipo
S1 3 θ 7→
eiθn1 0. . .
0 eiθnk
(22.1) rappr-s1-3-c
Per quanto riguarda le rappresentazioni reali, abbiamo visto la volta scorsa che lamatrice, dato che il polinomio caratteristico deve essere reale, dovra essere formata da
123

blocchi 2× 2, ognuno rappresentante di una rotazione di angolo nθ in un piano, e da unblocco rappresentante l’identita su un sottospazio (l’autospazio relativo all’autovalore 1).
22.3.2 Second step - Rappresentazioni di (S1)k
Vogliamo rappresentare un gruppo che consiste di k copie di S1. Si tratta di un prodottodiretto, quindi queste copie commutano tra loro. Da cio segue che commuteranno anchele immagini e, dato che ognuna si diagonalizza (visto appena sopra), e possibile diago-nalizzarle tutte insieme. Per quanto riguarda il caso complesso ci sono pochi problemi:trovo la base che va bene per tutte, trovo per ogni S1 gli nj che me la rappresentanoe per trovare la rappresentazione complessiva di (S1)k moltiplico tutte le matrici trova-te; essendo queste diagonali, mi viene facile, dovendo solo moltiplicare, per ogni caselladella diagonale, la casella in quella posizione della rappresentazione di ogni S1. Cosı, sel’i-esima S1 e rappresentata da una matrice con sulla diagonale degli nijθi, la matriceprodotto avra, nella posizione j-esima della diagonale,
∑niθi, con i da 1 a k.
Nota: quando capisco come si fa metto il disegno con le matrici che si moltiplicano.
Per quando riguarda il caso reale, tutto questo non funziona, dato che non possiamodiagonalizzare le matrici. Possiamo pero trovare una scomposizione in blocchi che vadabene per tutte, essenzialmente riconducendomi al caso complesso, diagonalizzando e con-siderando le coppie di caselle sulle diagonale con gli esponenti opposti. In questo modoottengo che ogni S1 e rappresentata con la sua matrice a blocchi 2 × 2, ossia rotazioni,piu gli 1 a seguire, Per avere la rappresentazione complessiva moltiplico tutte le matrici.Posso fare questo blocco per blocco, essendo le matrici diagonali a blocchi. Ma cosa vuoldire moltiplicare k blocchi 2× 2 ? Vuol dire comporre le rotazioni! Dunque, se sul bloccoi-esimo le mie k matrici hanno rotazioni rispettivamente di ni1θ1 . . . , nikθk, ossia nijθ : j,con i il blocco e j la S1 considerata, moltiplicando il tutto ottengo, al blocco i-esimo delprodotto una rotazione αi =
∑nijθj, con i da 1 a k.
Nota: idem, faro il disegno anche qui.
Ora siamo pronti:
22.4 Esercizio de la muerte
Nota: le osservazioni 1 e 3 seguenti richiamano le rappresentazioni di S1 appena ricordate:se a qualcuno servissero le ho lasciate, ma ho preferito avere prima dell’esercizio tutte leparti di teoria che sarebbero poi servite.
Esercizio 22.2. Sia G = (S1)k un gruppo e siano Vρ e Wσ due rappresentazioni reali diG. Dimostrare che se per ogni sottogruppo H < G vale dimV H = dimWH allora le duerappresentazioni di G sono equivalenti.
Dimostriamo in modo equivalente che fissata una rappresentazione Vρ gli interi dimV H
al variare di H tra i sottogruppi di G permettono di determinare completamente larappresentazione, a meno di isomorfismi.
Inoltre e equivalente studiare il problema considerando la rappresentazione complessadi G su V(C) = V ⊕ iV .
124

Osservazione 22.3. Se k = 1 la rappresentazione di G e, a meno di cambiamenti dibase, nella forma
eiθ 7→ diag(ein1θ, e−in1θ, · · · , einhθ, e−inhθ, 1, · · · , 1︸ ︷︷ ︸m copie
)
dove diag(a1, · · · , an) e la matrice diagonale che ha come entrate a1, . . . , an. Possiamosupporre che la base associata sia data da v1, v1, . . . , vh, vh, w1, . . . , wm. Possiamo inoltresupporre (a meno di scambiare i corrispondenti elementi della base) che tutti gli interini siano positivi e ordinati in modo decrescente, n1 ≥ n2 ≥ · · · ≥ nh. Considerando leripetizioni, possiamo scrivere
(n1, · · · , nh) = (m1, . . . ,m1︸ ︷︷ ︸a1 copie
, . . . ,ms, . . . ,ms︸ ︷︷ ︸as copie
)
Indichiamo con Cl < S1 il gruppo delle radici l-esime dell’unita. Indichiamo inoltrecon Cl1 × · · · × Clk il sottogruppo di (S1)k.
riga Osservazione 22.4. Se k = 1 vale che m = dimV G. Vale che
m1 = supn ∈ N| dimV Cn > V G,
2a1 = dimV Cm1 − dimV G
e per induzionemi+1 = supn ∈ N|n < mi dimV Cn < dimV G,
2ai+1 = dimV Cmi+1 − dimV G − 2∑
mi+1|mj ,j≤i
aj.
Osservazione 22.5. In generale per k > 1 la rappresentazione di G e, a meno dicambiamenti di base, nella forma
(eiθ1 , . . . , eiθk) 7→ diag(ein1α1(θ), e−in1α1(θ), · · · , einhα1(θ), e−inhα1(θ), 1, · · · , 1︸ ︷︷ ︸m copie
)
dove αi(θ) = ni,1θ1 + · · · + ni,kθk. Possiamo supporre, a meno di riordinare la base, chetutti gli interi ni,1 siano non negativi e che per ogni i il primo ni,j non nullo sia positivo.In questo modo la descrizione della rappresentazione di G e determinata univocamentedall’intero m e dalla matrice N = (ni,j).
Usando l’osservazioneriga22.4 e possibile determinare per ogni riga della matrice N il
valore assoluto degli interi che la costituiscono, a meno dell’ordine.
Osservazione 22.6. Nota: pare che bisogna scambiare righe e colonne, ma non ne capiscoil motivo.
Supponiamo di conoscere, a meno del modulo, tutte le entrate della matrice N finoalla riga (s − 1)-esima. Supponiamo inoltre che sia n il piu grande (in modulo) interodella riga s-esima di cui non conosciamo la collocazione nella matrice N . Chiamiamo Hl
125

il sottogruppo Cl1 × · · · ×Cls−1 ×Cl ×C1 × · · · × C1︸ ︷︷ ︸k−s copie
di G. L’intero n comparira (a meno
del segno) in una colonna i cui primi s− i valori sono l1, . . . , ls−1 se e solo se, vale:
dimV Hn − dimV G − 2∑
as,n′(l′1, . . . , l
′s−1) > 0 (∗)
dove i termini della somma variano tra tutte le s-uple (l′1, . . . , l′s−1, n
′) tali che per ognih = 1, . . . , s − 1 si ha lh|l′h e inoltre n|n′ e (l′1, . . . , l
′s−1, n
′) 6= /l1, . . . , ls−1, n). Definiamocome as,n(l1, . . . , ls−1) il valore della meta del termine sinistro della disuguaglianza (∗).Esso e esattamente in numero di volte in cui comparira (in modulo) il termine n in unacolonna le cui prime s− 1 entrate siano (in modulo) (l1, . . . , ls−1).
Notiamo che gli interi as,n(l1, . . . , ls−1) sono ben definiti (e quindi la somma nelladisuguaglianza (∗) ha senso) in quanto possiamo calcolarli induttivamente ordinando inmodo parziale le s-uple di interi (l′1, . . . , l
′s−1, n
′) secondo la relazione ≺ definita in questomodo:
(l′1, . . . , l′s−1, n
′) ≺ (l′′1 , . . . , l′′s−1, n
′′)
se e solo se le due s-uple sono distinte e inoltre l′′h|l′h per ogni h e n′′|n′. Sara quindipossibile calcolare il valore di as,n(l1, . . . , ls−1) per una fissata s-upla una volta che losi e calcolato per tutte le s-uple piu piccole (secondo l’ordinamento ≺). Queste sono innumero finito se ci restringiamo all’insieme delle s-uple ammissibili, ovvero tali per cuiper ogni posizione il corrispondente intero fa parte dell’insieme dei valori degli interi dellacorrispondente riga della matrice N , determinato dal Fatto
riga22.4. Per tutte le s-uple non
ammissibili possiamo definire il valore di a pari a 0.L’argomento precedente pu‘o essere raffinato per determinare completamente le en-
trate della matrice N (non solo a meno del segno). Definiamo il sottogruppo Si,j(l, l′)
come l’immagine della mappa ϕj,j′(l, l′) : S1 → G definita da
eiθ 7→ (1, · · · , 1, el′iθj, 1, · · · , 1, e−liθ
j′, 1, · · · , 1).
Fissata una s-upla di interi l = (l1, . . . , ls) definiamo il sottogruppo di G che chiamiamoHl, generato da Cl1 × · · · × Cls × C1 × · · · × C1︸ ︷︷ ︸
k−s copie
e dai sottogruppi Sj0,j(lj0 , lj) dove j0 e il
piu piccolo valore per cui lj0 e non nullo e j > j0 varia tra gli indici per cui lj e non nullo.
Osservazione 22.7. Vale che dimV Hl e pari al numero di colonne della matrice N percui la s-upla delle prime s entrate coincide con la s-upla l o con un suo multiplo per unintero.
Dimostrazione. Vale infatti che
V Hl =s⋂
h=1
V Clh ∩⋂
j>j0,lJ 6=0
V Sj0,j(lj0 ,lj).
Inoltre V Clh e il sottospazio di V in cui la h-esima copia di S1 in G agisce con moltiplica-zione per eilhθ o una sua potenza. Inoltre nel sottospazio V Sj0,j(lj0 ,lj) si ha che il rapportotra i coefficiente che danno l’azione della j0-esima e del j-esima copia di S1 in G e lostesso che si ha tra lj0 e lj. L’affermazione segue.
126
Capitolo 23
Ventitreesima lezione (AngeloVistoli, 25/02/2010)
23.1 Richiami
Definizione 23.1. Per noi una rappresentazione ρ di G, quando non e specificato diver-samente, consiste di:
• Uno spazio vettoriale (complesso e di dimensione finita).
• Un omomorfismo di gruppi ρ : G→ GL(Vρ).
Definizione 23.2. Il grado di una rappresentazione e la dimensione dello spazio vetto-riale Vρ
Osservazione 23.3. Le rappresentazioni di grado 1 sono omomorfismi di G in C∗
23.2 Rappresentazioni per permutazioni
Un esempio di rappresentazioni sono la rappresentazioni per permutazioni. Sia I un in-sieme finito e σ un’azione di G su I, σ : G → S(I). Come sappiamo un’azione definisceuna applicazione:
G× I → I
(s, i)→ si
si = σ(s)i
Ad ogni azione possiamo associare una rappresentazione.
Definizione 23.4. Chiamiamo CI lo spazio delle funzioni I → C definito come lecombinazioni lineari delle funzioni del tipo:
∀i ∈ G, ei : I → C, ei(j) =
1 i = j0 i 6= j
127

Definizione 23.5. Sia σ un’azione come definita prima. Diciamo rappresentazione perpermutazioni associata a σ, σ : G→ GL(CI) :
σ(s) : CI → CI
ei → eσ(s)i
Osservazione 23.6. Dato x ∈ CI , x =∑
i xiei:
σ(s)(∑i
xiei) =∑i
xiesi =∑i
xs−1iei
Dove per ottenere l’ultima equazione si e riordinata la base.
Esempio 23.7. Sia G = Cn =< h >, consideriamo l’azione su un qualsiasi insieme din elementi,
σ : Cn → Sn
σ(h)→ (12...n)
In questo caso CI = Cn e:
σ(h)(x1, ..., xn) = σ(h)(∑i
xiei) =
= x1e2 + x2e3 + ...+ xne1
= xne1 + x1e2 + ...+ xn−1en
Definizione 23.8. Siano ρ e σ due rappresentazioni. Diciamo che sono isomorfe, ρ ' σ,se esiste un isomorfismo lineare f : Vρ → Vσ tale che : fρ(s) = σ(s)f, ∀s ∈ G
Definizione 23.9. Un omomorfismo di rappresentazioni e un’applicazione lineare f :Vρ → Vσ tale che : fρ(s) = σ(s)f, ∀s ∈ G
Esercizio 23.10. Mostrare che non tutte le rappresentazioni sono isomorfe a una rap-presentazione per permutazioni.
Esercizio 23.11. Consideriamo le rappresentazioni di C2. Mostrare che queste sono uni-vocamente classificate da una coppia di numeri naturali visti come dimensione di due spaziV − e V +: V = V −⊕V +. Quali sono isomorfe ad una rappresentazione per permutazioni?
23.3 Operazioni sulle rappresentazioni
Da ora in poi ρ e σ sono due rappresentazioni.
23.3.1 Somma di rappresentazioni
Definizione 23.12. ρ + σ e una rappresentazione il cui spazio vettoriale e Vρ ⊕ Vσ e(ρ+ σ)(s) = ρ(s)⊕ σ(s)
128

Esercizio 23.13.(ρ1 ' ρ2), (σ1 ' σ2)→ ρ1 + σ1 ' ρ2 + σ2
Osservazione 23.14. Sia ρ una rappresentazione di grado n, esiste una rappresentazioneisomorfa ρ : G → GLn(C). Infatti, scelta una base B di Vρ, si assegna a s la matrice
associata a ρ(s). E evidente che l’isomorfimo naturale tra τ : Vρ → Cn, indotto da B,
soddisfa τρ(s) = ρ(s)τ .
Osservazione 23.15. Siano ρ : G → GLm(C) e σ : G → GLn(C) rappresentazioni. Lamatrice associata a ρ(s) ⊕ σ(s) e una matrice (m + n) × (m + n) a blocchi, dove i dueblocchi diagonali m×m e n× n rispettivamente, sono le matrici associate a ρ(s) e σ(s),e ha tutti zeri nelle altre entrate.
23.3.2 Prodotto di rappresentazioni
Definizione 23.16. ρσ e una rappresentazione sullo spazio vettoriale Vρσ = Vρ ⊗ Vσ, eρσ(s) = ρ(s)⊗ σ(s)
Osservazione 23.17.
ρσ(s)(ei ⊗ ej) = ρ(s)ei ⊗ σ(s)ej
= esi ⊗ esj= e(si,sj)
Osservazione 23.18.
• Se degρ = degσ = 1 allora il prodotto di rappresentazioni e proprio il prodotto inC∗
• deg(ρσ) = deg(ρ)deg(σ)
• deg(ρ+ σ) = degρ+ degσ
• Se G agisce su due insiemi I, J e ρ e σ sono le corrispondenti rappresentazioni perpermutazioni, allora ρσ e isomorfa alla rappresentazione per permutazioni ralativaall’azione di G su I × J
Definizione 23.19.
• Definiamo rappresentazione nulla di G 0 : G→ GL0(C)
• Definiamo la seguente rappresentazione 1:
G→ GL1(C) ' C∗
s→ 1
Esercizio 23.20. Mostrare la validita delle seguenti affermazioni:
• ρ+ σ ' σ + ρ
129

• ρσ ' σρ
• ρ+ 0 ' ρ
• ρ1 ' ρ
• ρ0 '0
• ρ(σ1 + σ2) ' ρσ1 + ρσ2
• ρ+ (σ + τ) ' (ρ+ σ) + τ
• ρ(στ) ' (ρσ)τ
23.4 Carattere di una rappresentazione
Definizione 23.21. Definiamo il carattere di una rappresentazione:
χρ : G→ Cs→ tr(ρ(s))
Esercizio 23.22.
• Qual e il carattere della rappresentazione nulla? χ0 =?
• χ1 =?
• Mostrare che:χρ+σ = χρ + χσ
• Mostrare cheχρσ = χρχσ
130
Capitolo 24
Ventiquattresima lezione (AngeloVistoli, 3/3/2010)
24.1 Caratteri di un gruppo.
Definizione 24.1. Sia G un gruppo e sia ρ : G → GL(Vρ) una sua rappresentazionecomplessa. Si definisce il carattere del gruppo indotto da ρ come la funzione χρ : G→ Ctale che, per ogni s ∈ G:
χρ(s) = tr(ρ(s))
Osservazione 24.2. Si puo mostrare che, se ρ e σ sono due rappresentazione di ungruppo G, allora χρ+σ = χρ + χσ e χρσ = χρ · χσ.
24.2 Duale di una rappresentazione.
Definizione 24.3. Sia G un gruppo e ρ : G → GL(Vρ) una sua rappresentazione. Larappresentazione ρ∗ : G→ GL(V ∗ρ ) e la rappresentazione tale che, per ogni s ∈ G:
ρ∗(s) = (ρ(s)−1)∗)
Tale rappresentazione e detta rappresentazione duale di ρ.
Osservazione 24.4. E facile verificare che la funzione ρ∗ definita sopra e effettivamenteuna rappresentazione. Invece la funzione ρ1 : G→ GL(V ∗ρ ) tale che, per ogni s ∈ G:
ρ1(s) = ρ(s)∗
non e una rappresentazione, perche in generale ρ1(st) 6= ρ1(s)ρ1(t).
Proposizione 24.5. ρ∗ cosı definita e una rappresentazione.
Dimostrazione. ρ∗ e definita da G in GL(V ∗ρ ). Dobbiamo verificare che sia un omomorfi-smo.
• ρ∗(1G) = ρ(1G)∗ = Id∗Vρ = IdV ∗ρ .
131

• ρ∗(st) = ρ ((st)−1)∗
= ρ(t−1s−1)∗ = [ρ(t−1) ρ(s−1)]∗
= ρ(s−1)∗ ρ(t−1)∗ = ρ∗(s) ρ∗(t).
Osservazione 24.6. Se degρ = 1, ρ∗(s) = ρ(s)−1.
Osservazione 24.7. Se ρ : G→ GLn(C) e una rappresentazione, ρ∗(s) = (ρ(s)t)−1 ∀s ∈
G
24.3 Caratere della rappresentazione duale
Vogliamo studiare come si comporta il carattere di una rappresentazione quando facciamoil duale. Abbiamo visto che Xρ(s) = trρ(s). Percio Xρ∗(s) = trρ∗(s) = tr(ρ(s)∗)−1. Nonabbiamo pero, in generale, un modo per scrivere la traccia di (ρ(s)∗)−1 a partire da quelladi ρ(s). Consideriamo quindi un caso particolare:
Proposizione 24.8. Sia G un gruppo finito, ρ una sua rappresentazione complessa.Allora Xρ∗ = Xρ. (Discende dal fatto che gli autovalori hanno modulo uno).
La proposizione vale piu in generale per G gruppo topologico compatto, perche ladimostrazione si basa solo sul fatto che gli autovalori hanno modulo 1.
Esercizio 24.9. Sia G un gruppo finito, ρ una sua rappresentazione per permutazioni.Allora ρ∗ ∼= ρ.
Esercizio 24.10. Esistono rappresentazioni di C3 tali che ρ∗ ρ.
132

Capitolo 25
Venticinquesima lezione (FilippoCallegaro, 09/03/2010)
25.1 Previously
Nelle precedenti lezioni abbiamo caratterizzato tutte le rappresentazioni complesse (ereali) continue di S1. In particolare le rappresentazioni irriducibili complesse di S1 sonotutte di dimensione 1 e sono nella forma
ϕ(eiθ) = eniθ n ∈ Z,
dove si intende che ϕ va da S1 ⊆ C a C∗ ∼= Aut(C).
Inoltre sappiamo che ogni rappresentazione di un gruppo compatto puo essere scrittacome somma diretta di rappresentazioni irriducibili, dunque la forma generica di unarappresentazione complessa di S1 e
eiθ 7→
ein1θ 0 · · · 0
0 ein2θ . . ....
......
. . . 00 0 · · · einkθ
.
Per il caso reale si sfrutta questo risultato; in particolare abbiamo mostrato che lerappresentzioni irriducibili reali di S1 sono di due tipi:
eiθ 7→ 1
eiθ 7→(
cosnθ − sinnθsinnθ cosnθ
).
25.2 Immersioni di S1 in SU(2)
Ora ci proponiamo di studiare le rappresentazioni complesse (sempre continue) di SU(2) ∼=S3 ⊆ H. Consideriamo intanto gli omomorfismi continui e iniettivi S1 → SU(2).
133

Lemma 25.1. Gli omomorfismi continui iniettivi ϕ : S1 → SU(2) sono tutti coniugatitra loro tramite un elemento di SU(2), cioe, date ϕ e ψ come sopra, esiste una matriceA ∈ SU(2) tale che Aϕ(g)A−1 = ψ(g) per ogni g ∈ S1. Inoltre ϕ(S1) = SU(2)∩H, doveH e un piano di H come R-spazio vettoriale:
H = span1, v v ∈ S2 ⊂ spani, j, k
Dimostrazione. ϕ : S1 → SU(2) induce naturalmente una rappresentazione di S1 su C2,che , a meno di cambio base, e
ϕ′ : eiθ 7→ A(θ) =
(einθ 00 eimθ
).
Siccome richiediamo che detA(θ) = 1 e che la mappa sia iniettiva, deve essere m =−n = 1, ovvero
ϕ′ : eiθ 7→(
eiθ 00 e−iθ
).
Sia v1, v2 una base di autovettori normalizzati per la rappresentazione. Allora, perogni θ:
〈v1, v2〉 = 〈ϕ(eiθ)v1, ϕ(eiθ)v2〉 = 〈eiθv1, e−iθv2〉 = e2iθ〈v1, v2〉,
ossia 〈v1, v2〉 = 0, quindi il cambio base dalla base canonica a v1, v2 e rappresentatoda una matrice unitaria. Per ottenere un cambio base in SU(2) basta sostituire v1 conv′1 = v1(det(v1, v2))−1: questo e ammissibile perche det(v1, v2) ∈ S1, quindi v′1 restaunitario.
Abbiamo allora dimostrato che ogni applicazione ϕ e coniugata tramite una matriceA ∈ SU(2) all’applicazione ϕ′, e dunque che due qualunque immersioni di S1 in SU(2)sono coniugate tra loro. Questo dimostra la prima parte del teorema.
Per la seconda parte, ricordiamo che avevamo identificato S3 con SU(2) secondol’omomorfismo iniettivo:
f : H ⊇ S3 −→ SU(2)
a+ ib+ jc+ kd 7−→(a+ ib −c− idc− id a− ib
).
Dunque risulta che Im f−1 ϕ′ = cos θ + i sin θ. Quindi, chiamando A := ϕ(i) ∈SU(2) e v := f−1(A) ∈ S3, risulta
Imϕ = Im(Aϕ′A−1) = A Imϕ′A−1 = f(cos θ + v sin θ).
Infine si ha che v2 = (f ϕ(i))2 = f(ϕ(i2)) = −1: ma, osservando la formula (eqn:prodotto-h2.1), si
vede facilmente che se v2 = −1 allora v ha parte reale nulla e norma 1, dunque v ∈ S2.Inoltre, abbiamo che cos θ + v sin θ = S3 ∪ H, dove H e definito come nell’enunciatodel lemma, che risulta quindi completamente dimostrato.
Torniamo al problema delle rappresentazioni di SU(2). In particolare, data una rap-presentazione ρ : SU(2) → GL(n,C), studieremo la rappresentazione di S1 ottenutaimmergendolo in SU(2) e poi applicandogli ρ. Possiamo osservare come ogni elemento
134

v ∈ S3 sia contenuto in un’immersione di S1 in S3: se v = 1 o v = −1, banalmen-te, esso sta nell’immagine di ciascuno di questi omomorfismi; altrimenti, possiamo co-struire u ∈ S2 proiettando v sull’iperpiano spani, j, k e poi normalizzandolo: allora uappartiene all’immagine della mappa:
ϕ : S1 −→ S3
eiθ 7−→ cos θ + u sin θ.
Questo, unito al lemma precedente, mostra come ogni immersione di S1 in SU(2) inrealta intercetta tutte le classi di coniugio del codominio.
Definizione 25.2. Il carattere di una rappresentazione ρ : G→ GL(n,C) e l’applicazioneχρ : G→ C data da χρ(g) = tr(ρ(g)).
Il carattere di una rappresentazione, in realta, e soltanto funzione delle classi di co-niugio, poiche la traccia e invariante per coniugio. Ma abbiamo appena visto che un’im-mersione di S1 in SU(2) intercetta tutte le classi di coniugio: ne possiamo dedurre laseguente proposizione.
Proposizione 25.3. Siano ρ, λ rappresentazioni di SU(2), ϕ un’immersione di S1. Seχρ e χλ coincidono su ϕ(S1) allora coincidono ovunque.
25.3 Digressione: ancora S1
Prima di proseguire, vediamo cosa ci apprestiamo a fare in un caso piu semplice efamiliare: S1. Prendiamo una rappresentazione in particolare:
α1 : eiθ 7→ eiθ.
L’intuito suggerisce che, in un qualche modo, questa e la ’rappresentazione fondamentale’,nel senso che sta alle altre rappresentazioni irriducibili come il numero 1 sta all’insiemeZ. In effetti vale la seguente
Proposizione 25.4. A meno di cambio base, ogni rappresentazione ρ : S1 → GLn(C)puo essere scritta utilizzando solo α1 e i simboli *(rappresentazione coniugata), ⊕ (sommadiretta) e ⊗ (prodotto tensore).
Dimostrazione.
α1 ⊗ α1 : eiθ 7→ e2iθ
α∗1 : eiθ 7→ e−iθ
Quindi, dato che il prodotto assume il ruolo della somma in Z e il coniugato quellodell’opposto, introduciamo la notazione naturale:
α01 = id, α1 ⊗ . . .⊗ α1 = αn1
α∗1 = α−11 , α∗1 ⊗ . . .⊗ α∗1 = α−n1 .
135

Con questa notazione e immediato che
ρ : eiθ 7→
ein1θ 0 · · · 0
0 ein2θ . . ....
......
. . . 00 0 · · · einkθ
⇒ ρ = αn11 ⊕ . . .⊕ α
nk1 .
25.4 Le rappresentazioni di SU(2) sono semisemplici
Riprendiamo con il nostro studio di SU(2). Come mostra il titolo, il teorema conclusi-vo afferma che ogni rappresentazione di SU(2) e semisemplice, cioe puo essere scrittacome prodotto diretto di rappresentazioni irriducibili. Per farlo utilizzeremo alcuni risul-tati relativi agli integrali su gruppi. Come al solito utilizzeremo (senza dimostrazione) ilseguente
Teorema 25.5. Sia G un gruppo localmente compatto. Allora esiste, ed e unica a menodi prodotto per scalare, una misura su G invariante a sinistra, ovvero tale che per ognif : G → R continua e per ogni h ∈ G vale
∫Gf(g)dg =
∫Gf(hg)dg. Tale misura e detta
misura di Haar.
Proposizione 25.6. Sia G un gruppo compatto. Allora una misura invariante a sinistrae anche invariante a destra.
Dimostrazione. Sia lh : g 7→ hg. Allora, per ipotesi,∫Gf(g)dg =
∫Gf(hg)dg =
∫Gf
lh(g)dg. Siccome G e compatto, la funzione 1 : g 7→ 1 e a supporto compatto, dunqueintegrabile. Fisso
∫G
1 · dg = 1. Ora notiamo che, per un qualunque h ∈ G, le due misure
µ : f 7→∫G
f(g)dg
µ′ : f 7→∫G
f(gh)dg =:
∫G
a(g)dg
sono entrambe invarianti a sinistra. Quindi µ′(f) = λµ(f) per un qualche λ ∈ R∗ e perogni f continua.
1 =
∫G
1(g)dg =
∫G
1(gh)dg = λ,
da cui immediatamente la tesi.
Lemma 25.7. Le rappresentazioni di SU(2) sono unitarie, cioe per ogni rappresentazioneesiste un prodotto hermitiano definito positivo tale che ogni elemento della rappresenta-zione e unitario.
Dimostrazione. Sia b(·, ·) un prodotto hermitiano definito positivo. Definiamo
c(u, v) :=
∫G
b(gu, gv)dg,
136

dove l’integrale e rispetto alla misura di Haar. Allora
c(u, v) = c(hu, hv)⇔∫G
b(gu, gv)dg =
∫G
b(ghu, ghv)dg,
che segue dall’invarianza a destra dell’integrale di Haar.
Siamo finalmente pronti ad enunciare il
Teorema 25.8. Le rappresentazioni continue di SU(2) sono semisemplici.
Dimostrazione. Sia ρ : SU(2)→ GLn(C) una rappresentazione, b il prodotto hermitianodefinito nel lemma. Se non ci sono spazi invarianti non banali ho gia finito. Sia allora Wun sottospazio invariante non banale; voglio dimostrare che anche W⊥ e invariante, il cheporta immediatamente alla tesi.
Siano z ∈ W,w ∈ W⊥. Dunque b(gz, gw) = b(z, w) = 0.
Con qesto teorema abbiamo ridotto il problema delle rappresentazioni di SU(2) a quel-lo delle sole rappresentazioni irriducibili di SU(2). Osserviamo, del resto, che in realtanon abbiamo utilizzato ipotesi specifiche sulla struttura di SU(2), ma solo la locale com-pattezza (per poter avere la misura di Haar) e la compattezza (per poter normalizzare lamisura). La stessa dimostrazione, quindi, prova in realta un risultato piu generale.
Teorema 25.9. Sia G un gruppo topologico compatto e localmente compatto. Allora ognirappresentazione continua di G e semisemplice.
25.5 Integrali su gruppi
Per concludere, una piccola nota per chiarire, almeno nei casi concreti che ci interessano,che cosa sia l’integrale su un gruppo. Questo non pretende di essere un discorso mate-matico compiuto, ma solo una panoramica che faccia intuire nel concreto su che cosastiamo lavorando. In particolare tutte le affermazioni enunciate e non dimostrate nonaggiungono nulla alla definizione formale di integrale su un gruppo. Per restare su casisemplici, consideriamo G n-varieta compatta.Ricopriamo G con aperti omeomorfi a Rn: G =
⋃α∈I Uα. Su ogni Uα fissiamo un sistema
di coordinate, cioe diamo un omeomorfismo ϕα : Uα → Vα ⊆ Rn, e calcoliamo l’integraleristretto:
f 7→∫Rnλ(x)f ϕ−1
α (x)dx.
Essenzialmente quindi calcolo l’integrale a pezzi nei vari aperti omeomorfi a Rn. Affin-che questa operazione sia univoca, bisogna porre delle condizioni sulle intersezioni. Inparticolare, sia f con supporto in Uα ∩ Uβ; allora voglio∫
Vα
λα(x)f ϕ−1α (x)dx =
∫Vβ
λβ(x)f ϕ−1β (x)dx,
cioe voglio ϕαβ : Vα → Vβ diffeomorfismo (funzione C∞ con inverso C∞) tale che
λβ = λα det(∇ϕαβ).
137

138

Capitolo 26
Ventiseiesima lezione (FilippoCallegaro, 10/03/2010)
26.1 Lemma di Schur
Partiamo subito con il lemma di Schur, un risultato che ci permette di concludere moltosulla struttura degli spazi di omomorfismi di rappresentazioni. Innanzitutto, si verificafacilmente che, dati V ,W C-spazi vettoriali, Hom(V,W ) e anch’esso un C-spazio vetto-riale: dati due omomorfismi A,B : V → W , basta definire (A+B)(v) = A(v) +B(v) perogni v ∈ V e (λA)(v) = λA(v) per ogni v ∈ V, λ ∈ C.
Teorema 26.1 (lemma di Schur). Sia G un gruppo qualsiasi, W e V sue rappresentazionicomplesse, di dimensione finita e irriducibili, allora:
1. Sia f : V → W un G-omomorfismo (ovvero un omomorfismo di rappresentazioni):allora o f e un isomorfismo o e l’omomorfismo banale che manda tutto in 0 ∈ W .
2. Sia f : V → V un G-omomorfismo: allora esiste un λ ∈ C tale che f e della formaλIdV .
3. HomG(V,W ) (l’insieme dei G-omomorfismi da V in W ) e un C-spazio vettoria-le e la sua dimensione e 1 se V e W sono isomorfi come G-rappresentazioni,altrimenti 0.
Dimostrazione. 1. Per provare il primo punto dimostriamo che il nucleo e l’immaginedi un omomorfismo di rappresentazioni f sono sottospazi G-invarianti. Questo cibasta, perche, essendo V e W irriducibili, per definizione, gli unici sottospazi G-invarianti sono quello banale 0 e tutto lo spazioW . Quindi se il nucleo coincide contutto lo spazio, f e l’omomorfismo banale (e la sua immagine risulta quindi essere0); se invece il nucleo e 0, l’omomorfismo e iniettivo, per cui, se la dimensionedi V e maggiore di 0, lo e anche quella dell’immagine, che dunque e W : f e cosıanche suriettivo, quindi un isomorfismo.
Osserviamo ora che v ∈ ker f significa che f(v) = 0; ma dunque g · f(v) = 0 e, peripotesi, f(gv) = 0: questo equivale a dire che gv ∈ ker f .
139

Allo stesso modo, se w ∈ =f , allora esiste v ∈ V tale che f(v) = w. Componendocome prima: f(gv) = gw, dunque gw ∈ Imf . Questo dimostra il primo punto delteorema.
2. Notiamo che λIdV e un G-omomorfismo, poiche agisce su V moltiplicando per unoscalare e le rappresentazioni, che sono lineari, commutano con moltiplicazioni perscalari. Ne segue che anche gλ := f − λIdV e un G-omomorfismo.
Possiamo dunque invocare su esso il risultato del punto precedente: poiche f possie-de perlomeno un autovalore complesso λ, abbiamo che ker gλ e non banale. Dunque,per il risultato precedente, coincide con V . Questo prova che f = λIdV , ossia ilsecondo punto.
3. Supponiamo che esista un omomorfismo f : V → W non banale: allora, per il primopunto del teorema, f e un isomorfismo tra V e W .
Utilizziamo la f per costruire un’applicazione tra HomG(V,W ) e HomG(V, V ):
g 7→ g f−1.
Questa applicazione e chiaramente iniettiva (e la sua inversa e la composizionecon f) e la dimensione dell’immagine e 1, per quanto visto nel secondo punto.Dunque la dimensione del dominio e al piu 1, ma e proprio 1 perche f vi appartiene.Questo prova il terzo punto.
26.2 Unicita della decomposizione in irriducibili
Studiamo ora il caso piu complesso in cui V e ancora irriducibile, mentre W e sommadiretta di due rappresentazioni W1 e W2.
Dimostriamo innanzitutto che Hom(V,W ) ∼= Hom(V,W1)⊕ Hom(V,W2): consideria-mo f : V → W e v ∈ V . Allora w = f(v) si scrive in modo unico come w = w1 + w2,con w1 ∈ W1, w2 ∈ W2. Possiamo allora definire le “proiezioni” di f come le funzionif1 : v 7→ w1 e f2 : v 7→ w2, che sono omomorfismi da V rispettivamente in W1 e W2 (laverifica del fatto che sono omomorfismi e immediata).
Inoltre, la corrispondenza f 7→ (f1, f2) e facilmente invertibile, e l’inversa e l’applica-zione che manda (f1, f2) in f1 + f2 (ossia la funzione v 7→ f1(v) + f2(v).
Questo risultato ci permette di provare il prossimo teorema: osserviamo, intanto, chequanto appena descritto rimane vero anche se consideriamo gli spazi di G-omomorfismianziche tutti gli omomorfismi. Questo ci permette di concludere che
dim HomG(V,W ) = dim HomG(V,W1) + dim HomG(V,W2).
Teorema 26.2. Siano V una G-rappresentazione irriducibile, W somma diretta di nG-rappresentazioni irriducibili Wi: allora
dim HomG(V,W ) = #Wi | Wi∼= V .
Dimostrazione. La dimostrazione e una banale applicazione del lemma di Schur una voltache si e utilizzata l’identita appena discussa per spezzare
dim HomG(V,W ) = dim HomG(V,W1) + · · ·+ dim HomG(V,Wn).
140

Osservazione 26.3. Abbiamo gia visto che se G e compatto allora ogni sua rappresen-tazione e semisemplice, ossia si puo scrivere come somma diretta di rappresentazioniirriducibili. Il teorema appena visto ci diche anche che questa scrittura e unica, perche ilnumero di copie di una rappresentazione irriducibile Wi che stanno nella rappresentazioneV e proprio dim HomG(V,Wi), che e una caratteristica intrinseca degli spazi.
Esempio 26.4. GL(n,C), U(n), SU(n) nelle loro rappresentazioni naturali su Cn, ov-vero come matrici che moltiplicano a sinistra, sono irriducibili: infatti, preso un qualsiasivettore v ∈ Cn ed un qualsiasi sottospazio non banale W ⊆ Cn posso comunque trova-re una matrice speciale unitaria (e dunque, a maggior ragione, una matrice unitaria osemplicemente invertibile) che porti v in W .
26.2.1 Esecizi
Esercizio 26.5. Sia ρ la rappresentazione di S1 su U(2,C) che manda
eit 7→ B(t) :=
(cos t − sin tsin t cos t
).
Trovare i sottospazi irriducibili di ρ ed una matrice A tale che AB(t)A−1 sia diagonale.
Esercizio 26.6. Trovare Z(GL(n,C)), dove con Z(G) si intende il centro del gruppo G(ossia il sottogruppo degli elementi che commutano con ogni altro elemento di G).
Suggerimento: usare il lemma di Schur.
26.3 Proprieta della traccia
Elenchiamo le principali proprieta della traccia, la maggior parte delle quali gia note ogia dimostrate; per le altre si dara una prova di seguito. Assumiamo che V sia uno spaziovettoriale complesso e che f e g siano omomorfismi di V .
1. La traccia e un’applicazione lineare tr : Hom(V, V )→ C;
2. tr(gfg−1) = tr f con g ∈ GL(V );
3. tr(fg) = tr(gf);
4. tr(f ⊗ g) = tr f · tr g;
5. tr f = tr fT ;
6. Se f e idempotente (ossia f 2 = f), allora tr f = dim Im f ;
7. Sia V uno spazio vettoriale complesso avente lo stesso sostegno di V e la stessaaddizione, ma nel quale il prodotto per scalare e definito nel seguente modo:
λ ·V v := λ ·V v.
Si puo verificare che la stessa funzione f e lineare anche in V : chiamiamola f quandointendiamo riferirci ad essa come omomorfismo di V ; allora vale che tr f = tr f .
141

I primi cinque punti sono noti.Per quanto riguarda il punto 6, notiamo che il polinomio minimo di f divide x(x−1):
dunque sulla diagonale della forma di Jordan ci sono solo zeri e uni. Inoltre, nessun bloccodi autovalore 0 puo avere dimensione maggiore di uno, perche altrimenti su esso f nonsarebbe idempotente. Il risultato segue banalmente.
Per il punto 7 e sufficiente notare che la matrice associata a f rispetto ad una qualsiasibase di V (che e base anche per V ) e proprio la matrice ottenuta coniugando membro amembro la matrice associata a f .
26.4 Integrali e funzioni lineari
Sia G un gruppo: abbiamo detto cosa sia un integrale di Haar per funzioni continua asupporto compatto da G in C. La stessa definizione si puo generalizzare in modo ovvioper funzione che assumono valori in Cn, semplicemente integrando separatamente ognicoordinata.
lem:integrale-lineare-commutano Lemma 26.7. Sia G un gruppo dotato di una misura di Haar. Sia f : G → Ck unafunzione integrabile (ossia continua e con supporto compatto) e sia ϕ : Ck → Cn lineare.Allora ϕ f e a sua volta integrabile e si ha:∫
G
ϕ f(g) dg = ϕ
(∫G
f(g) dg
).
Dimostrazione. ϕ f e ovviamente continua ed a supporto compatto. Dobbiamo dunquemostrare che vale l’uguaglianza.
Sia (hij) la matrice associata a ϕ rispetto alla base canonica e siano f1, . . . fk lecomponenti di f . Allora, per 1 ≤ i ≤ n (e ricordando la linerita dell’integrale) vale laseguente relazione:(∫
G
ϕ f(g) dg
)i
=
∫G
(ϕ f(g))i dg =
∫G
k∑j=1
hijfj(g) dg =
=k∑j=1
hij
∫G
fj(g) dg =k∑j=1
hij
(∫G
f(g) dg
)j
=
=
(ϕ
(∫G
f(g) dg
))i
.
La tesi segue immediatamente.
26.5 Verso il teorema di ortogonalita dei caratteri
Sia G un gruppo compatto e ρ una sua rappresentazione sul C-spazio vettoriale V .
Definizione 26.8. L’insieme v ∈ V | g ·v = v ∀g ∈ G e un sottospazio, che chiamiamosottospazio G-invariante ed indicheremo con V G.
Proposizione 26.9. Esiste una proiezione p di V su V G che e G-lineare.
142

Dimostrazione. Definiamo p nel seguente modo:
p : v 7→∫G
gv dg
(dove l’integrale si considera calcolato termine a termine sulle varie componenti delvettore).
Dobbiamo verificare i seguenti fatti:
• p|V G = IdV G : sia v ∈ V G; abbiamo allora gv = v per ogni g ∈ G, da cui∫Ggv dg =∫
Gv dg = v, poiche l’integrale e normalizzato.
• p(V ) ⊆ V G: sia v ∈ V e h ∈ G; per il lemmalem:integrale-lineare-commutano26.7 e per l’invarianza rispetto a
traslazioni sinistre vale:
hp(v) = h
∫G
gv dg =
∫G
hgv dg = p(v),
ossia p(v) ∈ V G.
La stessa uguaglianza, sfruttando il fatto che l’integrale di Haar che stiamo utilizzan-do e invariante anche per traslazioni destre, ci dice che hp(v) = p(v) =
∫Gghv dg =
p(hv), ossia che p e G-lineare.
rmk:carattere-dim-invariante Osservazione 26.10. Essendo una proiezione, p e idempotente, dunque la sua tracciacoincide con la dimensione della sua immagine, che e V G. Sempre applicando il lemmalem:integrale-lineare-commutano26.7 si ottiene che:
dimV G = tr p =
∫G
tr g dg.
143

144

Capitolo 27
Ventisettesima lezione (AngeloVistoli, 16/03/2010)
27.1 Caratteri di rappresentazioni
Definizione 27.1. Dato un gruppo finito G e una rappresentazione ρ : G → GL(Vρ), ilcarattere di tale rappresentazione e una funzione χρ tale che:
χρ : G→ C
s 7→ tr(ρ(s))
Valgono le seguenti proprita, che possono essere dimostrate applicando le prprietadella traccia e le definizioni di somma, prodotto e duale di una rappresentazione :
• ρ ' σ ⇒ χρ = χσ
• χρ+σ = χρ + χσ
• χρ⊗ σ = χρ · χσ
• χρ∗ = χρ
Inoltre ricordiamo che vale questa banale proprieta:
deg(ρ) = 1⇒ χρ = ρ
27.2 Rappresentazioni regolari
Preliminarmente richiamiamo cosa si intende con rappresentazione per permutazioni.
Definizione 27.2. Sia G un gruppo che agisce su un insieme finito I; questa azione ciinduce una rappresentazione per permutazioni ρ su uno spazio vettoriale V avente basee : I → V , in cui ∀i ∈ I e ∀s ∈ G
ρ : G→ GL(V )
ρ(s)(ei) 7→ es·i
145

Ricordiamo che con la notazione Is indichiamo l’insieme stabilizzato da s, ovvero:
Is = i ∈ I| s · i = i.
Per una rappresentazione per permutazione vale questa proprieta:
χρ(s) = |Is|
Questo si capisce scrivendo la matrice associata a χρ(s) nella base eii ∈ I: questamatrice contiene al suo interno n volte il numero 1, ma questi si trovano sulla diagonalese e solo se il corrispondente vettore di base viene stabilizzato da ρ(s).
Definizione 27.3. Dato un gruppo finito G che agisce su se stesso per traslazione asinistra (ovvero l’azione di un elemeto s su un elemento g consiste nel prodotto s · g ),esso induce una rappresentazione per permutazione R sullo spazio C|G| =
∑g∈G ageg (in
cui e : G → C|G| e una base e ag sono dei numeri complessi) detta rappresentazioneregolare.
R : G→ GL(C|G|)
R(s)(∑g∈G
ageg) =∑g∈G
ages·g =∑g∈G
as−1geg
Poiche il carattere di una rappresentazione per permutazioni al variare di s ∈ Gassume il valore |Is| e dal fatto che g · s = s soltanto quando g = 1, risulta che per unarappresentazione regolare vale:
χR(s) =
|G| se s = 1
0 se s 6= 1.
27.3 Scomposizione in rappresentazioni irriducibili
Proposizione 27.4. Data una rappresentazione di un gruppo finito G 7→ Vρ esiste unprodotto Hermitiano su Vρ tale che ∀s ∈ G,∀v, w ∈ Vρ < v|w > = < ρ(s)(v)|ρ(s)(w) >.
Dimostrazione. Dato ( · | · ) prodotto Hermitiano qualsiasi consideriamo
< v|w >≡ 1
|G|∑g∈G
(ρ(g)(v)|ρ(g)(w))
Questo e un prodotto Hermitiano (e anch’esso sesquilineare e definito positivo) e possiedela proprieta voluta, in quanto:
< ρ(s)(v)|ρ(s)(w) >=1
|G|∑g∈G
(ρ(gs)(v)|ρ(gs)(w)) ==1
|G|∑h∈G
(ρ(h)(v)|ρ(h)(w)) =< (v)|(w) >
(27.1)
146

Osservazione 27.5. Nel caso generale in cui G sia un gruppo topologico compatto eρ ne sia una rappresentazione continua, al posto della sommatoria sugli elementi di Gbisognera utilizzare un integrale (vedi teorema 25.7 e 25.8). Tuttavia un gruppo finitodotato della topologia discreta risulta essere un gruppo topologico compatto; poiche inoltreesiste un unico integrale invariante per traslazioni normalizzato, questo coincide appuntocon la sommatoria sopra adoperata.
Proposizione 27.6. Dato un sottospazio W di Vρ ρ invariante, esso ammette un com-plementare ρ-invariante.
Dimostrazione. Il teorema segue dal precedente, in quanto si verifica che W⊥ secondo ilprodotto Hermitiano definito precedentemente e ρ-invariante. Infatti ∀z ∈ W , ∀w ∈ W⊥
< ρ(g)(w)|z >=< w|ρ(g−1)(z) >= 0
Osservazione 27.7. In generale un sottospazio vettoriale ρ-invariante puo avere altrisottospazi ad esso complentari e invarianti; l’esempio banale e quello della rappresenta-zione identitaria, in cui ogni sottospazio e invariante e anche ogni suo complementare einvariante.
Definizione 27.8. Sia ρ rappresentazione non irriducibile, con deg(ρ) > 1, e sia W unssv non banale di Vρ; pongo ∀s ∈ G:
σ : G→ GL(W )
σ(s) ≡ ρ(s)|Wtale σ e detta sottorappresentazione di ρ.
Se ρ ammette una sottorappresentazione sigma, allora σ′ = ρ|W⊥ e anch’essa unasottorappresentazione di ρ e vale:
ρ ' σ + σ′
Come conseguenza immediata di quanto appena detto abbiamo il seguente fatto:
Proposizione 27.9. Ogni rappresentazione continua, di un gruppo topologico compatto,di grado finito e somma di rappresentazioni irriducibili.
Esempio 27.10.G = S3 = id, (12), (13), (23), (123), (132)
G agisce su I = 1, 2, 3, inducendo una rappresentazione per permutazione ρ su C3; ρnon e invariante: W = span(e1 + e2 + e3) e ρ-invariante;
ρ|W e la rappresentazione 1;quindi ρ ' 1+ ρ1; si puo mostrare che ρ1 invece e irriducibile.Risulta che in questo caso il prodotto Hermitiano standard gode gia della proprieta di
essere ρ-invariante: <x|y >=∑
j xjyj con e1, e2, e3 base ortonormale; <ρ(s)(ei)|ρ(s)(ej)>= <es·i|es·j >= δij = <ei|ej >
147

Teorema 27.11. Ogni rappresentazione complessa irriducibile di un gruppo abeliano(anche infinito!) su uno spazio vettoriale finito ha grado 1.
Dimostrazione. Sia G il gruppo abeliano, ρ : G → GL(Vρ) rappresentazione irriducibile.Applico il secondo punto del lemma di Schur: ogni operatore T : Vρ → Vρ tale che∀s ∈ GT ρ(s) = ρ(s) T e della forma λ · Id per qualche λ ∈ C.
⇒ ∀s, t ∈ Gρ(s)ρ(t) = ρ(st) = ρ(ts) = ρ(T )ρ(s)
⇒ ∀s ∈ G∃λs tale che ρ(s) = λsId
⇒ tutti i sottospazi sono ρ− invarianti
⇒ deg(ρ) = 1
Osservazione 27.12. L’esempio fatto su S3 portato prova che se si toglie l’ipotesi cheG sia abeliano questo teorema perde validita.
27.4 Base ortonormale per CG
Sia G un gruppo finito e denotiamo con CG lo spazio vettoriale delle funzioni da Gin CG; su questo spazio vettoriale poniamo un prodotto Hermitiano dato da: (f |g) =
1|G|∑
s∈G f(s)g(s) ; osserviamo che, per ogni rappresentazione ρ di G, χρ ∈ CG.
Teorema 27.13. Sia G un gruppo abeliano finito; allora i caratteri (intesi come rappre-sentazioni 1-dimnsionali complesse) formano una base ortonormale di CG con il prodottoHermitiano sopra definito. Come corollario discende che ogni gruppo abeliano finito ha|G| caratteri.
Dimostrazione. : Cominciamo col mostrare che i cartteri sono un insieme ortonormale.ρ : G→ C∗ carattere, quindi ρ(s) e una radice dell’unita ∀s ∈ G.
(ρ|ρ) =1
|G|∑s∈G
ρ(s)ρ(s) =1
|G|∑s∈G
|ρ(s)|2 =1
|G|∑s∈G
1 = 1
ρ, σ : G→ C∗ ρ 6= σ
(ρ|σ) =1
|G|∑s∈G
ρ(s)σ(s) =1
|G|∑s∈G)
ρ(s)σ−1(s) =1
|G|∑s∈G
(ρσ−1)(s) =1
|G|∑s∈G
τ(s) = (τ |1)
in cui τ ≡ ρσ−1 6= 1. Quindi, per concludere la dimostrazione e sufficiente mostrareche per τ 6= 1 (τ |1) = 0.
∃h ∈ G tale che τ(h) 6= 1⇒ τ(h)∑s∈G
τ(s) =∑s∈G
τ(hs) =∑s∈G
τ(s)
⇒ (1− τ(h))∑s∈G
τ(s) = 0;
148

1− τ(s) 6= 0⇒∑s∈G
τ(s) = 0
Ci rimane da dimostrare che i caratteri formano una base; poiche sono ortonormali,sono anche linearmente indipendenti; mi rimane da verificare quindi che generano tuttoCG. Per far questo ci serviremo diR : G→ GL(CG) rappresentazione regolare; riscriviamoun fatto che ci tornera utile:
χR(s) =
|G| se s = 1
0 se s 6= 1.
Ora considero tutti i caratteri distinti ρ1, ... ,ρm: G→ C∗. Il numero intero m ci indicaquanti caratteri distinti possiede G; inoltre so che m ≤ |G|, in quanto abbiamo verificatoche questi caratteri sono linearmente indipendenti nello spazio CG, che ha dimensione—G—.
Nel teorema precedente si e dimostrato che ogni rappresentazione di un gruppo abe-liano finito e scomponibile in sottorappresentazioni irriducibili di grado 1; questo equivalea dire che ogni rappresentazione finita e somma diretta di una quantita finita di caratteri(rappresentazioni 1-dimensionali):
R ' n1ρ1 ⊕ ...⊕ nmρmin cui moltiplicare un carattere per un numero ni significa semplicemente sommare ni
volte tale carattere. Calcoliamo adesso il carattere della rappresentazione regolare:
χR = n1ρ1 + ...+ nmρm
D’altronde sappiamo che i ρi sono caratteri e percio sono ortonormali; questo cipermette di calcolare i valori ni:
(χR|ρi) = (χR = n1ρ1 + ...+ nmρm|ρi) = ni
=1
|G|∑s∈G
χR(s)ρi(s) = 1
In definitiva la rappresentazione regolare si scompone come somma di m caratteridistinti, ovvero:
R ' ρ1 ⊕ ...⊕ ρmQuesto ci permette di concludere: infatti la rappresentazione regolare ha grado |G| e
i caratteri hanno grado 1; percio servono almeno |G| caratteri per riuscire a comporre larappresentazione regolare, il che comporta m = |G|.
149

150

Capitolo 28
Ventottesima lezione (AngeloVistoli, 17/03/2010)
28.1 Relazione di ortagonalita fra caratteri e conse-
guenze
In questa lezione assumeremo che stiamo lavorando con rappresentazioni di un gruppo Gfinito. Le nostre rappresentazioni saranno sempre su spazi vettoriali su C. Tanti risultatiottenuti qui possono pero essere generalizzati a casi dove G e compatto e non per forzafinito. Il caso dei gruppi finiti e un caso particolare di gruppi topologici compatti incui la topologia introdotta e quella discreta. Infatti un gruppo finito con la topologiadiscreta sugli elementi e un gruppo topologico compatto. Date queste ipotesi eventualigeneralizzazzioni sfruttano la possibilita di sostituire somme con integrali come visto nelteorema (
haarth1??) e negli esercizi (
haarex1??) e (
haarex2??).
Definizione 28.1. CG e lo spazio vettoriale dei caratteri delle rappresentazioni. In par-ticolare sia ρ una rappresentazione di G. ρ 7→ χρ ∈ CG in cui (χρ)g∈G = tr(ρ(g)). Perproprieta definite prima la mappa di carattere e un’applicazione “lineare” nel senso chesi comporta bene rispetto alla somma delle rappresentazioni.
Teorema 28.2 (Relazione di ortagonalita fra i caratteri). Definiamo su CG il seguenteprodotto scalare (·, ·)
(f, g) =1
|G|∑s∈G
f(s)g(s)
Siano inoltre ρ e σ due rappresentazioni (complesse) irriducibili. Allora si ha
(χρ, χσ) =
1 se ρ ' σ0 se ρ '/ σ
Teorema 28.3 (Esistenza di una base finita di rappresentazioni irriducibili). Esiste unsistema di rappresentazioni ρ1, . . . , ρr tali che sono
1. Sono irriducibili
2. ρi '/ ρj per i 6= j
151

3. Sono tutte le rappresentazioni irriducibili a meno di isomorfismi, cioe ∀σ rappre-sentazione irriducibile ∃i, σ ' ρi
Dimostrazione. Per assurdo ci siano infinite rappresentazioni non nulli irriducibili di Gnon isomorfi a due a due. Il carattere di una qualsiasi di queste rappresentazioni ρ non puoessere nullo infatti ρ ' ρ allora (χρ, χρ) = 1. Costruisco quindi iterativamente una baseortonormale in CG. Avendo costruito una base considero un ρ irriducibile qualsiasi chenon sia isomorfo a nessuno delle rappresentazioni scelte per la base. Si ha ∀i (χρ, χρi) = 0quindi χρ = 0 ma questo e assurdo.
Dato questo, per il teorema di scomposizione di rappresentazioni, segue che ogni rap-presentazione σ di G e scomponibile σ ' n1ρ1 + . . . + nrρr con ni ∈ N. Ma alloraχσ = n1χρ1 + . . . + nrχρr . Ma allora abbiamo che (χσ, χρi) = ni quindi la scrittura didecomposizione e unica. Intanto abbiamo anche che:
Corollario 28.4. Due rappresentazioni sono isomorfi se e solo se sono uguali i lorocaratteri.
Corollario 28.5. Una rappresentazione ρ e irriducibile se e solo se (χρ, χρ) = n21 + . . .+
n2|G| = 1
Definizione 28.6 (Rappresentazione regolare). Una rappresentazione R : G→ Gl(C|G|)che associa a s ∈ G l’endomorfismo R(s) : (eg) 7→ (esg) ∀g ∈ G che poi si estende a tuttolo spazio vettoriale si dice rappresentazione regolare.
In generale si ha che χR(1) = |G| = Dim(C|G|) e ∀g 6= 1G χR(g) = 0. Questo implicache ∀ρ rappresentazione irriducibile (χR, χρ) = χρ(1) = Dim(Vρ). Ma questo implica cheR = d1ρ1 + . . .+ drρr con di = Dim(Vi).
Osservazione 28.7. Si ha inoltre che (χR, χR) = |G| = d21 + . . .+ d2
r
28.2 Classi di coniugio e funzioni di classe
Definizione 28.8. Se G e un gruppo, esso agisce naturalmente su se stesso per coniugio:(g, x) 7→ gxg−1. Le orbite per questa azione si chiamano classi di coniugio.
Definizione 28.9. Una funzione di classe e una funzione costante sulle classi di coniugio.
Osservazione 28.10. Il carattere e una funzione di classe in quanto χρ(gxg−1) = tr(ρ(gxg−1)) =
tr(ρ(g)ρ(x)ρ(g)−1) = tr(ρ(x)) = χρ(x) perche la traccia e invariante per similitudine.
Definizione 28.11. Cl(G) e lo spazio delle funzioni di classe su G. Si ha che Cl(G) ⊂ CGe χρ ∈ Cl(G)
Osservazione 28.12. Dim(Cl(G)) = il numero di classi di coniugio
Si costruisce una base per Cl(G). Sia [ω] ⊂ G una classe di coniugio di G. Sia e[ω] =∑x∈[ω] ex. e[ω] e una base.
Corollario 28.13. Il numero di rappresentazioni irriducibili e inferiore al numero diclassi di coniugio.
152

28.3 Tabelle di caratteri e studio delle rappresenta-
zioni irriducibili di alcuni gruppi
In genere si possono studiare con quanto detto fino ad ora le rappresentazioni irriducibilidi alcuni gruppi. Cominciamo con lo studio delle rappresentazioni di S3.
Quali sono le classi di coniugio di S3 In genere due elementi di Sn sono nella stessaclasse di coniugio se e solo se hanno la stessa struttura in cicli infatti:
Sia τ ∈ Sn con τ = (a1a2a3 . . . ac1) (b1b2 . . . bc2) . . . Allora sia σ ∈ Sn; si verifica che
στσ−1 = (σ(a1)σ(a2)σ(a3) . . . σ(ac1)) (σ(b1)σ(b2) . . . σ(bc2)) . . .
Quindi le classi di coniugio di S3 sono tre e sono [e], [(12)], [(123)] e in queste classici sono rispettivamente 1, 3, 2 elementi. L’ordine del gruppo e 6. Come conseguenza lerappresentazioni irriducibili sono al piu tre (tanti quanti le classi di coniugio). Sianod1, d2, d3 gli ordini delle tre rappresentazioni ρ1, ρ2, ρ3 e si ha che d2
1 + d22 + d2
3 = |S3| = 6dalla quale cosa si ha che 1 + 1 + 22 = 6 quindi d1 = d2 = 1 e d3 = 2. Ora possiamocostruire una tabella con le colonne corrispondenti alle classi di coniugio, le righe allerappresentazioni irriducibili e infine le singole caselle ai valori dei caratteri:
S3 [e] (1) [(12)] (3) [(123)] (2)ρ1 1 ? ?ρ2 1 ? ?ρ3 2 ? ?
Cominciamo considerando che conosciamo gia due rappresentazioni irriducibili di gra-do 1 di S3 che sono la rappresentazione 1 e la rappresentazione ε segno della permutazione.La nostra tabella diventa:
S3 [e] (1) [(12)] (3) [(123)] (2)1 1 1 1ε 1 −1 1ρ 2 x y
Verifichiamo le condizioni di ortogonalita:
(χ1, χ1) =1
6(1 + 3 · 1 + 2 · 1) = 1
(χε, χε) =1
6(1 + 3 · (−1 · −1) + 2 · 1) = 1
(χ1, χε) =1
6(1 + 3 · (−1 · 1) + 2 · 1) = 0
Imponendo invece le condizioni di ortogonalita sull’ultimo si ha:
(χ1, χρ) =1
6(2 + 3 · x+ 2 · y) = 0
(χε, χρ) =1
6(2 + 3 · (−1 · x) + 2 · y) = 0
(χρ, χρ) =1
6(22 + 3 · xx+ 2 · yy) = 1
153
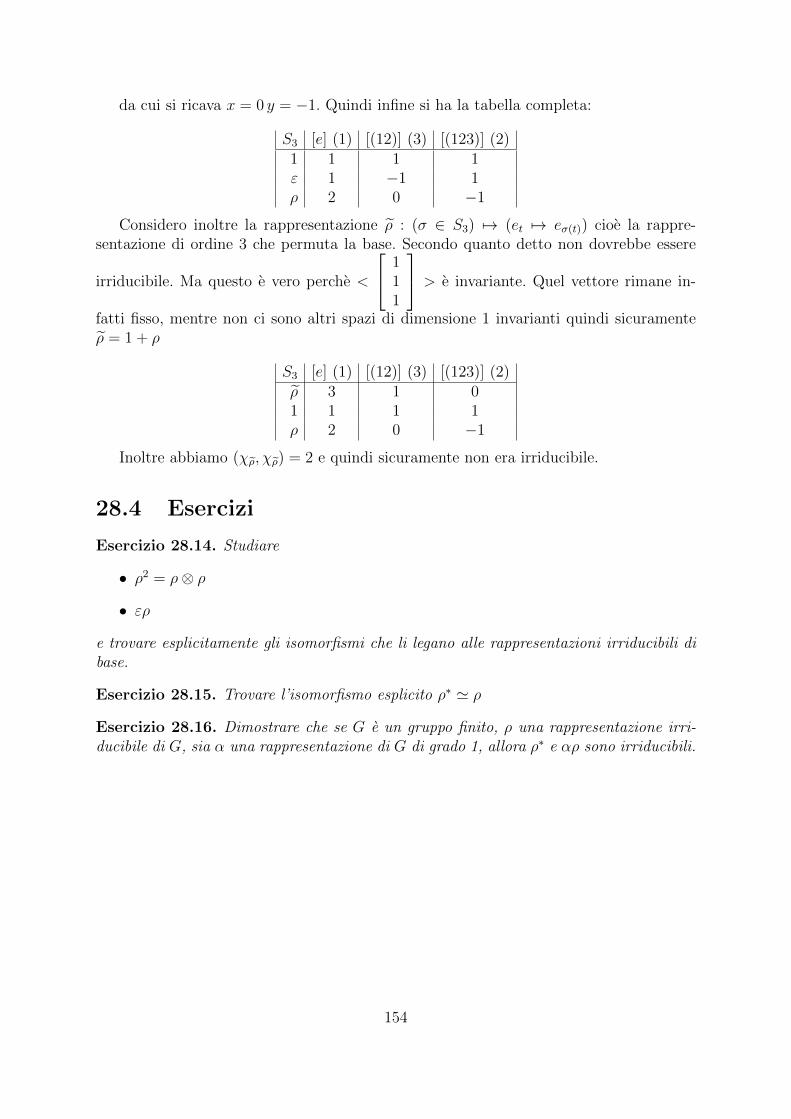
da cui si ricava x = 0 y = −1. Quindi infine si ha la tabella completa:
S3 [e] (1) [(12)] (3) [(123)] (2)1 1 1 1ε 1 −1 1ρ 2 0 −1
Considero inoltre la rappresentazione ρ : (σ ∈ S3) 7→ (et 7→ eσ(t)) cioe la rappre-sentazione di ordine 3 che permuta la base. Secondo quanto detto non dovrebbe essere
irriducibile. Ma questo e vero perche <
111
> e invariante. Quel vettore rimane in-
fatti fisso, mentre non ci sono altri spazi di dimensione 1 invarianti quindi sicuramenteρ = 1 + ρ
S3 [e] (1) [(12)] (3) [(123)] (2)ρ 3 1 01 1 1 1ρ 2 0 −1
Inoltre abbiamo (χρ, χρ) = 2 e quindi sicuramente non era irriducibile.
28.4 Esercizi
Esercizio 28.14. Studiare
• ρ2 = ρ⊗ ρ
• ερ
e trovare esplicitamente gli isomorfismi che li legano alle rappresentazioni irriducibili dibase.
Esercizio 28.15. Trovare l’isomorfismo esplicito ρ∗ ' ρ
Esercizio 28.16. Dimostrare che se G e un gruppo finito, ρ una rappresentazione irri-ducibile di G, sia α una rappresentazione di G di grado 1, allora ρ∗ e αρ sono irriducibili.
154

Capitolo 29
Ventinovesima lezione (FilippoCallegaro, 23/03/2010)
29.1 Verso il teorema di ortogonalita dei caratteri
irriducibli
Abbiamo visto in una delle ultime lezioni come, se V eW sono rappresentazioni del gruppoG, allora G si rappresenta naturalmente anche su Hom(V,W ) = V ∗⊗W . Ricordiamo, inparticolare, che preso g ∈ G e f ∈ Hom(V,W ) vale che
[gf ](v) = g(f(g−1v)).
Per definizione, il sottospazio G-invariante Hom(V,W )G e lo stesso spazio che pre-cedentemente avevamo definito come HomG(V,W ), ossia lo spazio che commuta con larappresentazione.
Come visto alla fine dell’ultima lezione, tramite la misura di Haar si puo ottenere unaproiezione p di Hom(V,W ) su HomG(V,W ) costruita in questo modo:
f 7→ p(f) =
∫G
gf dg,
ossia tale che
[p(f)](v) =
∫G
[gf ](v) dg.
In particolare, se V e irriducibile, il lemma di Schur ci permette di concludere cheHomG(V, V ) ∼= C.
Andiamo avanti ed analizziamo un po’ meglio il comportamento del proiettore p inquesto caso.
Proposizione 29.1. Sia V rappresentazione irriducibile del gruppo compatti G e sia fendomorfismo di V . Allora vale
p(f) =
∫G
gf dg =tr f
dimVIdV .
155

Dimostrazione. Ovviamente p(f) ∈ HomG(V, V ), dunque e della forma C ·Idv, con C ∈ C.Tuttavia vale che:
C · dimV = tr p(f) =
∫G
tr(gf) dg =
∫G
tr(ρ(g)fρ(g)−1) dg =
∫G
tr f dg = tr f .
29.2 Caratteri irriducibili
Ricordiamo la seguente definizione.
Definizione 29.2. Sia ρ : G→ GL(V ) una rappresentazione complessa: allora definiamoil suo carattere:
χρ : G → C∗
g 7→ tr ρ(g).
Esso e a sua volta una rappresentazione di G.Se Vρ e irriducile, allora diremo che anche il carattere e irriducibile.
Dalle proprieta dalla traccia viste la scorsa lezione discendono le seguenti proprietadella funzione carattere.
Proposizione 29.3. Siano V e W due rappresentazioni complesse di G e χV e χW irispettivi caratteri. Allora:
1. χV e una funzione continua;
2. Se V ∼= W , allora χV = χW ;
3. Per ogni g, h ∈ G vale che χV (ghg−1) = χV (h) (ossia il carattere e una funzione diclasse);
4. χV⊕W = χV + χW ;
5. χV⊗W = χV ∗ χW ;
6. Se G e compatto e V e una rappresentazione continua, allora
χV ∗(g) = χV (g−1) = χV (g) = χV (g);
7. χV (e) = dimV .
Possiamo dunque enunciare e dimostrare il teorema principale della teoria dei carat-teri.
Teorema 29.4 (di ortogonalita dei caratteri irriducibili). Sia G un gruppo compatto eV e W due sue rappresentazioni continue.
1.∫GχV (g) dg = dimV G;
2.∫GχV (g)χW (g) dg = dim HomG(V,W );
156

3. Se V e W sono irriducibili, allora∫G
χV (g)χW (g) dg =
0 se V W
1 se V ∼= W.
Prima di passare all dimostrazione, possiamo osservare tra i caratteri di un gruppo Gcompatto possiamo definire un prodotto hermitiano in questo modo:
〈χV , χW 〉 :=
∫G
χV (g)χW (g) dg.
Allora il teorema ci dice che i caratteri irriducibili formano un sistema ortonormalesecondo questo prodotto. Questo fatto ha conseguenze importantissime nel prosieguo dellateoria e nel calcolo effettivo dei caratteri di un certo gruppo.
Dimostrazione. Il primo punto coincide con l’osservazionermk:carattere-dim-invariante26.10, mentre il terzo e un’im-
mediata conseguenza del secondo e del lemma di Schur.Il secondo punto non e molto piu complesso degli altri due: e sufficiente osservare che,
poiche HomG(V,W ) = (V ∗ ⊗W )G,
dim HomG(V,W ) =
∫G
χV ∗⊗W dg =
∫G
χV (g)χW (g) dg =
∫G
χV (g)χW (g) dg,
dove l’ultima uguaglianza e vera perche, chiaramente, si tratta di un numero reale (anzi,naturale).
Osservazione 29.5. Il carattere determina la rappresentazione: infatti possiamo scrivereuna rappresentazione di un gruppo compatto come V =
⊕V ⊕nii . Ma per quanto appena
visto vale che ni = dim HomG(V, Vi) = 〈V, Vi〉, che dipende unicamente dai caratteri di Ve Vi.
Si potrebbe andare avanti e scoprire che i caratteri irriducibili, in effetti, sono propriouna base ortornormale dello spazio dei caratteri. Nel caso finito, sappiamo che i caratterisono al massimo |G| (e raggiungono tale massimo nel caso dei gruppi abeliani, perche inessi ogni classe di coniugo e un singoletto). Ogni altra rappresentazione si puo esprimerecome somma di un numero finito di caratteri irriducibili. Questo argomento non sara,tuttavia, trattato in questo corso.
Osservazione 29.6. Esprimendo V come nell’osservazione precedente, risulta che
〈χV , χV 〉 =∑i
n2i .
Dunque tale numero vale 1 se e solo se χV e irriducibile.
157

158
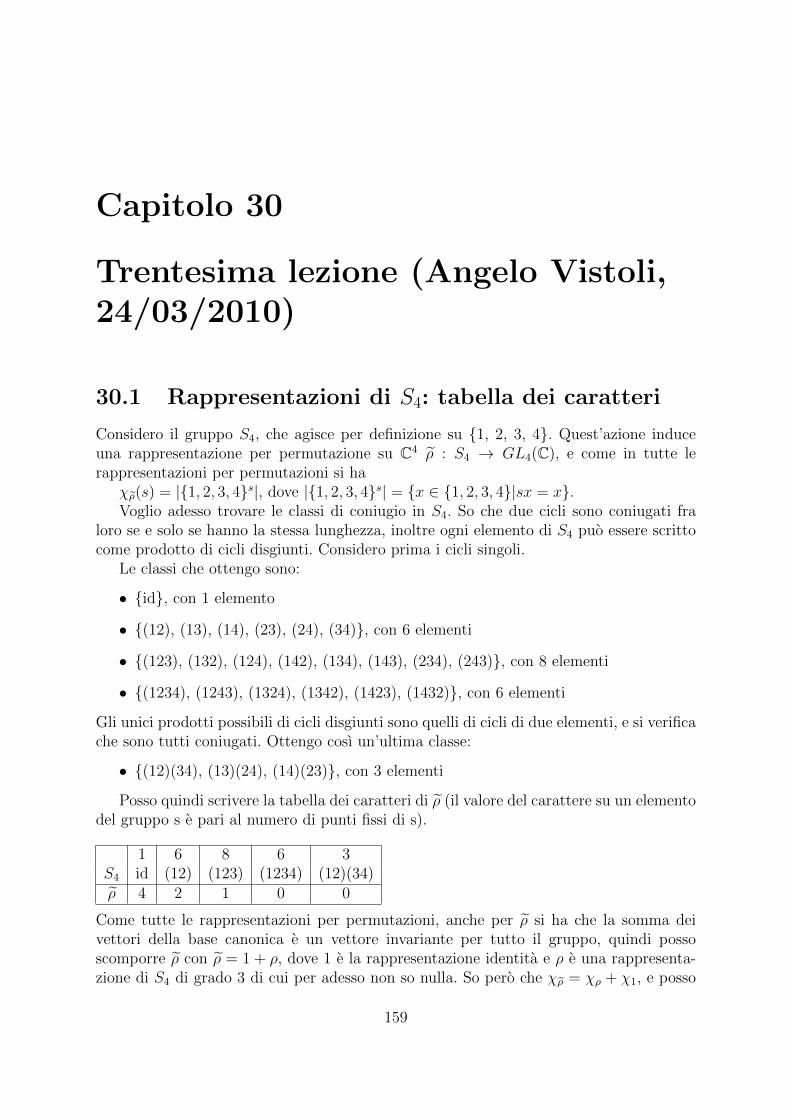
Capitolo 30
Trentesima lezione (Angelo Vistoli,24/03/2010)
30.1 Rappresentazioni di S4: tabella dei caratteri
Considero il gruppo S4, che agisce per definizione su 1, 2, 3, 4. Quest’azione induceuna rappresentazione per permutazione su C4 ρ : S4 → GL4(C), e come in tutte lerappresentazioni per permutazioni si ha
χρ(s) = |1, 2, 3, 4s|, dove |1, 2, 3, 4s| = x ∈ 1, 2, 3, 4|sx = x.Voglio adesso trovare le classi di coniugio in S4. So che due cicli sono coniugati fra
loro se e solo se hanno la stessa lunghezza, inoltre ogni elemento di S4 puo essere scrittocome prodotto di cicli disgiunti. Considero prima i cicli singoli.
Le classi che ottengo sono:
• id, con 1 elemento
• (12), (13), (14), (23), (24), (34), con 6 elementi
• (123), (132), (124), (142), (134), (143), (234), (243), con 8 elementi
• (1234), (1243), (1324), (1342), (1423), (1432), con 6 elementi
Gli unici prodotti possibili di cicli disgiunti sono quelli di cicli di due elementi, e si verificache sono tutti coniugati. Ottengo cosı un’ultima classe:
• (12)(34), (13)(24), (14)(23), con 3 elementi
Posso quindi scrivere la tabella dei caratteri di ρ (il valore del carattere su un elementodel gruppo s e pari al numero di punti fissi di s).
1 6 8 6 3S4 id (12) (123) (1234) (12)(34)ρ 4 2 1 0 0
Come tutte le rappresentazioni per permutazioni, anche per ρ si ha che la somma deivettori della base canonica e un vettore invariante per tutto il gruppo, quindi possoscomporre ρ con ρ = 1 + ρ, dove 1 e la rappresentazione identita e ρ e una rappresenta-zione di S4 di grado 3 di cui per adesso non so nulla. So pero che χρ = χρ + χ1, e posso
159

ottenere il carattere di ρ per differenza. Infatti la rappresentazione 1 e l’identita e hagrado 1, quindi il suo carattere vale 1 su ogni elemento del gruppo. Trovato il carattere diρ, si verifica che (χρ|χρ) = 1, e quindi ρ e irriducibile. Posso adesso iniziare a scrivere latabella dei caratteri di S4. Ci sono 5 classi di coniugio, quindi avro 5 classi di isomorfismodi rappresentazioni irriducibili. Conosco gia le rappresentazioni 1, ε e ρ, dove ε e la rappre-sentazione segno di grado 1 che manda le permutazioni pari nell’identita e quelle dispariin -id. Ricordando che il prodotto tensore di una rappresentazione di grado 1 con unarappresentazione irriducibile e irriducibile, si ha che ερ e irriducibile. Sia ρ′ = ερ. Si hache χρ′ = χεχρ, quindi il carattere di ρ′ e noto. Sia σ la rappresentazione mancante. Sia Rla rappresentazione regolare e siano d1, d2, d3, d4, d5 i gradi rispettivamente di 1, ε, ρ, ρ′, σ.So che R = d11 +d2ε+d3ρ+d4ρ
′+d5σ, quindi χR = d1χ1 +d2χε+d3χρ+d4χρ′ +d5χσ. Ilgrado di una rappresentazione e pari al valore del carattere calcolato sull’identita, quindiconosco d1, d2, d3, d4. So che d2
1 +d22 +d2
3 +d24 +d2
5 = |G| = 4! = 24, da cui ricavo d5 = 2. Soche il carattere di R vale —G— sull’identita e 0 sugli altri elementi, quindi per differenzaottengo il carattere di σ e ho la tabella completa dei caratteri.
1 6 8 6 3S4 id (12) (123) (1234) (12)(34)1 1 1 1 1 1ε 1 -1 1 -1 1ρ 3 1 0 -1 -1ρ′ 3 -1 0 1 -1σ 2 0 -1 0 2
Si puo verificare che tutti i caratteri sono ortogonali e hanno norma unitaria.
30.2 Lemma
Sia ρ una rappresentazione di G finito su V.
Allora |χρ(s)| ≤ degρ∀s ∈ G, e χρ(s) = degρ se e solo se ρ(s) = id.
Infatti ρ(s) e diagonalizzabile con autovalori di modulo unitario, e la traccia e lasomma degli autovalori, che e in modulo ≤ della somma dei moduli, che e pari al grado diρ. Se χρ(s) = degρ, deve quindi essere che tutti gli autovalori sono uguali a 1, e ρ(s) = id.
30.3 Studio di σ
Considero la rappresentazione irriducibile di S4 σ : S4 → GL2(C). Applicando il lemmaprecedente si ottiene che kerσ = id, (12)(34), (13)(24), (14)(23). Questo sottogruppodi S4 viene solitamente indicato con V ed e detto sottogruppo di Klein. V e un ker,quindi e normale in S4. Si verifica inoltre che V e abeliano, e quindi prodotto direttodi gruppi ciclici. Si verifica ancora che V = C2xC2. Considero S4/V e la proiezione alquoziente π : S4 → S4/V . Per il teorema di omomorfismo esiste un’unica rappresentazioneσ : S4/V → GL2(C) tale che σ π = σ. Noto che esiste un omomorfismo suriettivoϕ : S4 → S3 che ha come nucleo esattamente V.
Sia X=partizioni di 1, 2, 3, 4 in sottoinsiemi con due elementi.
160

Si verifica che X=1,2, 3,4, 1,3, 2,4, 1,4, 2,3. S4 agisce in modonaturale su X, che ha 3 elementi, e tramite quest’azione ottengo la ϕ : S4 → S3. Si verificache ϕ e suriettiva e che kerϕ = V . Esiste quindi un’unica ϕ : S4/V → S3 isomorfismo taleche ϕ π = ϕ. Quindi S4/V e canonicamente isomorfo a S3, e ho σ ϕ−1 : S3 → GL2(C)rappresentazione irriducibile di S3 di grado 2. Come gia dimostrato, S3 ha un’unica classedi isomorfismo di rappresentazioni di grado 2 che deve pertanto essere isomorfa a σ ϕ−1.
30.4 Esercizi
1. Siano G, H gruppi finiti e ϕ : G→ H omomorfismo suriettivo.
Dimostrare che ogni rappresentazione irriducibile di H induce una rappresentazioneirriducibile di G.
2. Posso vedere S4 come il gruppo delle rotazioni che fissano un cubo. Sia infatti G ilgruppo delle rotazioni che fissano il cubo. Si ha che —G—=24. Considero l’azione diG sulle diagonali interne del cubo. Quest’azione mi da un omomorfismo ϕ : G→ S4.Si verifica che ϕ e un isomorfismo.
Calcolare il carattere della rappresentazione per permutazioni τ che corrispondeall’azione di S4 sulle facce del cubo. Verificare che (χτ |χτ ) = 3 e che τ = 1 + ρ′+ σ.Trovare la scomposizione Vτ = V1 ⊕ Vρ′ ⊕ Vσ.
3. Trovare la tabella dei caratteri di A4 = S4/Z2.
Hint: in A4 ci sono 4 classi di coniugio che hanno come rappresentanti id, (123),(132), (12)(34).
161

162

Capitolo 31
Trentunesima lezione (FilippoCallegaro, 14/04/2010)
31.1 Potenze simmetriche ed algebra simmetrica
La potenza simmetrica e una costruzione che si puo fare su uno spazio vettoriale analo-ga alla potenza esterna, ma nella quale la condizione di alternanza e sostitita con unacondizione di simmetria. Piu precisamente:
Definizione 31.1. Siano V e W spazi vettoriali e sia f : V k → W un’applicazione k-multilineare. Allora diciamo che f e simmetrica se per ogni σ ∈ Sk vale che:
f(v1, . . . , vk) = f(vσ(1), . . . , vσ(k)).
Si confronti questa definizione con quella di applicazione alternante, nella quale asecondo membro moltiplichiamo per il segno della permutazione σ.
Definizione 31.2. Sia V uno spazio vettoriale sul campo K. Allora, fissato un certok > 0, chiamiamo potenza simmetrica ed indichiamo con Sk(V ) un spazio vettoriale suK con un’applicazione multilineare simmetrica Il puntino si vede poco, da
sistemare
V × · · · × V︸ ︷︷ ︸k volte
- Sk(V )
v1 × · · · × vk - v1 · · · · · vk
tale che ogni applicazione f k-multilineare simmetrica esista un’unica f : Sk(V ) → Wlineare tale che
f(v1, . . . , vk) = f(v1 · · · · · vk), ∀v1, . . . , vk ∈ V .
La dimostrazione di esistenza ed unicita della potenza simmetrica per ogni k > 0 e deltutto analoga a quella gia vista per la potenza esterna. In particolare, una volta ottenutolo spazio V ⊗k = V ⊗ · · · ⊗ V︸ ︷︷ ︸
k volte
, sara necessario ottenere il quoziente per il sottospazio
generato dai vettori del tipo
v1 ⊗ · · · ⊗ vi−1 ⊗ (vi ⊗ vi+1 − vi+1 ⊗ vi)⊗ vi+2 ⊗ · · · ⊗ vk.
163
Sempre in analogia con quanto gia visto a proposito della potenza esterna, possiamoosservare che, se 〈e1, . . . en〉 e una base di V , una base di Sk(V ) e data dai vettori del tipo
〈ei1 · · · · · eik | 1 ≤ i1 ≤ · · · ≤ ik ≤ n〉
(notare che, nel caso della potenza esterna, le disuguaglianze erano strette).
Esercizio 31.3. Dimostrare con precisione tutti i fatti suggeriti sopra.
Definizione 31.4. Si definisce algebra esterna dello spazio vettoriale V lo spazio
S(V ) =∞⊕k=0
Sk(V ).
31.1.1 Azione sulla potenza simmetrica
Supponiamo che sia data una rappresentazione ρ : G→ V di un gruppo G su uno spazioV . Allora e possibile definire in modo naturale un’azione su Sk(V ) in questo modo: perogni g ∈ G si considera inizialmente l’applicazione
ρk(g) : V × · · · × V︸ ︷︷ ︸k volte
→ V × · · · × V︸ ︷︷ ︸k volte
che semplicemente applica ρ(g) su tutte le coordinate:
ρk(g)(v1, . . . , vk) = (ρ(g)v1, . . . , ρ(g)vk).
Sia ora ϕ la composizione della potenza simmatrica con l’applicazione appena de-scritta: essa e un’applicazione multilineare simmetrica da V k in Sk(V ), dunque puo es-sere fattorizzata tramite la potenza esterna. Otteniamo quindi un’applicazione Skρ(g) :Sk(V )→ Sk(V ) lineare, come mostra il seguente diagramma commutativo:
Sk(V )Skρ(g)
- Sk(V )
V × · · · × V︸ ︷︷ ︸k volte
·6
ρk(g)-
ϕ
..........
..........
..........
..........
.-
V × · · · × V︸ ︷︷ ︸k volte
·6
Esercizio 31.5. Mostrare che la funzione Skρ cosı definita e effettivamente una rappre-sentazione di G su Sk(V ). Bisogna prima provare che Skρ(g) e invertibile, poi che Skρ eeffettivamente un omomorfismo di gruppi.
31.2 Rappresentazioni irriducibili di SU(2)sec:irriducibili-su2
Vogliamo ora cercare le rappresentazioni irriducibili continue complesse di SU(2). Percominciare possiamo considerare la rappresentazione banale su C, che chiameremo V0.
Definiamo ora V = C2 e consideriamo l’azione naturale di SU(2) su V , che costi-tuira un’altra rappresentazione irriducibile: chiamiamola V1. Ovviamente possiamo ancheconsiderare la sua rappresentazione duale, V ∗.
164

Proposizione 31.6. V ∗ e isomorfa a V come rappresentazione di SU(2).
Dimostrazione. Sappiamo che due rappresentazioni sono isomorfe se hanno lo stesso ca-rattere. Dunque ci e sufficiente dimostrare che, presa A ∈ SU(2), il carattere di A rap-presentata su V e uguale al carattere di A rappresentata su V ∗. Ma, evidentemente, ilcarattere di A su V e proprio la traccia di A. Poiche la traccia e invariante per coniu-gio, possiamo assumere che A sia diagonale (in quanto ogni matrice su SU(2) puo esserediagonalizzata).
Dunque A ha la forma
A =
(a 00 a
), a ∈ S1.
E dunque evidente che la relativa matrice nella rappresentazione duale (che e la traspostadell’inversa) ha lo stesso carattere.
A partire da V1 e possibile definire tutte le altre rappresentazioni irriducibili di SU(2)utilizzando la potenza simmetrica. Definisco:
Vi := Sn(V1) = Sn(V ∗),∀n ∈ N.
L’aver identificato V1 con la rappresentazione su (C2)∗
ci permette di interpretare Vncome lo spazio dei polinomi omogenei in due variabili di grado n, a coefficienti in C.Osserviamo come, fissato n, una base di questo spazio sia data dai polinomi pk(z1, z2) :=zk1z
n−k2 .Il resto della lezione sara dedicato alla dimostrazione del fatto che le rappresentazioni
Vn sono tutte e sole le rappresentazioni irriducibili si SU(2).
31.2.1 Irriducibilita delle Vn
Proposizione 31.7. Gli spazi Vn sopra descritti sono rappresentazioni irriducibili diSU(2).
Dimostrazione. Osserviamo che ci e sufficiente dimostrare che ogni funzione A : Vn →Vn che sia SU(2)-invariante e in realta un multiplo dell’identita: in effetti, se Vn nonfosse irriducibile, poiche SU(2) e compatto, dovrebbe essere semisemplice, ossia dovrebbepotersi scrivere come Vn = W1 ⊕W2, non banali. Ma in tal caso potrei considerare lamatrice A che si comporta come due diversi multipli dell’identita su W1 e su W2, chesarebbe SU(2)-invariante.
Consideriamo ga ∈ SU(2): a meno di un cambio di base posso diagonalizzarla escriverla come
ga =
(a 00 a
), a ∈ S1.
Per come ho definito l’azione su Vn (ossia come potenza simmetrica di V ∗, non V ),valgono le seguenti identita:
gaz1 = az1
gaz2 = az2,
165

dalle quali discende immediatamente che gapk = an−2kpk. Dunque l’azione su Vn e dia-gonale: un’applicazione che commuta con essa deve lasciare invariati tutti gli autospazi.Ne consegue che, considerando un qualsiasi a per il quale tutte le potenze del tipo an−2k
siano distinte, A si deve diagonalizzare rispetto alla base dei pk: scriviamo che Apk = ckpkper certi ck. Dobbiamo dunque dimostrare che tutti i ck sono uguali.
Consideriamo ora gli elementi le matrici della forma
Bt =
(cos t − sin tsin t cos t
)∈ SU(2), t ∈ R.
Abbiamo per ipotesi che ABtpn = BtApn. Espandendo a sinistra si trova:
ABtpn = A(Btzn1 ) =
= A [(cos tz1 + sin tz2)n] =
=n∑k=0
(n
k
)cosk t sinn−k t Apk =
=n∑k=0
(n
k
)cosk t sinn−k t ckpk.
Analogamente, a destra:
BtApn = Btcnpn =
= cn [(cos tz1 + sin tz2)n] =
=n∑k=0
(n
k
)cosk t sinn−k t cnpk.
Poiche i pk sono una base di Vn, e sufficiente considerare un t per il quale sin t e cos tnon sono nulli per ottnere che ck = cn per ogni k, che prova la proposizione.
31.2.2 Le Vn sono tutte le rappresentazioni irriducibili
Proposizione 31.8. Le Vn sono tutte le rappresentazioni irriducibili di SU(2).
Dimostrazione. Sia ρ : SU(2) → GL(W ) una rappresentazione continua su W spaziovettoriale complesso. Devo dimostrare che χρ si puo scrivere come combinazione linearedi caratteri delle Vi. Per studiare il carattere di ρ considero l’immersione di S1 in SU(2)cosı fatta:Non credo di aver mai visto
un diagramma cosı schifoso
S1⊂
j- SU(2)
ρ- GL(W )
eiθ - geiθ =
(eiθ 00 e−iθ
).
L’applicazione ρ j, essendo composizione di omomorfismi, e una rappresentazione diS1, dunque sappiamo che e semplice. Possiamo dunque considerare N sufficientementegrande e scrivere:
χρj(eiθ) =
N∑k=−N
akeikθ.
166

In SU(2), geiθ e ge−iθ sono coniugati, dunque su di essi il carattere assume lo stessovalore. Il polinomio di Laurent scritto e dunque invariante secondo tra trasformazioneθ 7→ −θ, il che implica che ak = a−k per ogni k. Dunque:
χρj(eiθ) = a0 +
N∑k=1
ak(eikθ + e−ikθ).
Posso scrivere questo polinomio rispetto alla baseb0 = 1bk = eikθ + e−ikθ
.
Non mi e chiara la conclu-sione della dimostrazione,quando mi viene in mentela aggiungo
31.3 Rappresentazioni irriducibili di SO(3)
Avevamo visto che SO(3) ∼= SU(2)±Id . Dunque le rappresentazioni di SO(3) sono esattamente
le rappresentazioni di SU(2) in cui l’opposto dell’identita agisce in modo banale. Non mi e del tutto chia-ro il fatto che esse restinoeffettivamente irriducibili
Esercizio 31.9. Le rappresentazioni in cui cio avviene sono tutte e sole le V2n. Con-venzionalmente la rappresentazione di SO(3) ottenuta passando al quoziente V2n comerappresentazione di SU(2) si indica con Wn.
31.4 Operazioni tra rappresentazioni di SU(2)
Esercizio 31.10. Provare che vale:
Vk ⊗ Vl =
q⊕j=0
Vk+l−2j, q = mink, l.
Esercizio 31.11. Cos’e Λ2(Vn)? E Vn ⊗ Vn?
167

168

Capitolo 32
Trentaduesima lezione (FilippoCallegaro, 20/04/2010)
32.1 Riassunto puntate precedentiDa spostare nella lezioneprecedenteNelle lezioni precedenti abbiamo trovato tutte le rappresentazioni irriducibili di SO(3),
le abbiamo chiamate Vn e abbiamo dimostrato che il loro carattere e definito dal suovalore sull’immagine dell’immersione R : S1 → SO(3). In particolare, il carattere eχVn(R(eiθ)) =
∑nk=0 e
i(n−2k)θ. Vale che dim(Vn) = n+ 1.
In seguito, tramite l’isomorfismo ϕ : SU(2)±Id → SO(3), abbiamo visto che le rappresen-
tazioni di SO(3) sono tutte le rappresentazioni V2k. Denotiamo Wk := V2k.
32.2 Risoluzione di alcuni esercizi
Esercizio 32.1 (formula di Clebsch-Gordan). Dimostrare che
Vk ⊗ Vl =
q⊕j=0
Vk+l−2j, (32.1) eqn:clebsh-gordan
con q = minl, k.
Dimostrazione. Prima di tutto, notiamo che Vk e l’unica rappresentazione irriducibile diSO(3) di dimensione k + 1.
Con un conto di dimensioni, si ottiene (supponendo k ≤ l):
dim
(k⊕j=0
Vk+l−2j
)=
k∑j=0
k + l − 2j + 1 =
= (k + 1)(k + l + 1)− 2k∑j=0
j =
= (l + 1)(k + 1) + k(k + 1)− k(k + 1) =
= (l + 1)(k + 1) =
= dim(Vk ⊗ Vl)
169

Dato che, nella (eqn:clebsh-gordan32.1) a destra ho una somma di rappresentazioni irriducibili, e suffi-
ciente descrivere la rappresentazione a sinistra nello stesso modo. Se i due risultati sonouguali, la tesi segue dall’unicita della scomposizione.Direi che la conclusione e
giusta, ma la spiegazionesbagliata Per fare questo, utilizziamo i caratteri (ricordandoci che due caratteri coincidono se
e sono se coincidono sull’immagine tramite R di S1). Chiamato x := eiθ,
R(x) =
(x 00 x
)=
(eiθ 00 e−iθ
). (32.2) eqn:immersione-s1-su2
Risulta che:
χVl⊗Vk(R(x)) = χVl(R(x)) · χVk(R(x)) =
=
(l∑
i=0
xl−2i
)·
(k∑j=0
xk−2j
)=
=l∑
i=0
k∑j=0
xl+k−2(i+j).
A destra, invece:
χ⊕qj=0 Vk+l−2j
(R(x)) =
q∑j=0
l+k−2j∑i=0
x(l+k−2j)−2i.
Dobbiamo semplicemente mostrare che queste due sommatorie sono uguali. Sempresupponendo (ovviamente senza perdita di generalita) che k ≤ l, ossia con q = k, possiamomanipolare quest’ultima espressione come segue:
χ⊕qj=0 Vk+l−2j
(R(x)) =k∑j=0
(l−j∑i=0
xl+k−2(i+j) +
k+l−2j∑i=l−j+1
xl+k−2(i+j)
)=
=k∑j=0
l−j∑i=0
xl+k−2(i+j) +k∑j=0
k−j∑i′=1
xk−l−2i′ .
Nel secondo addendo a destra, il termine generale della sommatoria non dipende da j,dunque posso riordinare i termini della somma su i′ e sostituire nuovamente i, ottenendoil risultato cercato:
χ⊕qj=0 Vk+l−2j
(R(x)) =k∑j=0
l−j∑i=0
xl+k−2(i+j) +k∑j=0
j∑i′=1
xk−l−2i′ =
=k∑j=0
(l−j∑i=0
xl+k−2(i+j) +l∑
i=l−j+1
xl+k−2(i+j)
)=
= χVl⊗Vk(R(x)).
Osservazione 32.2. Per lasciare un po’ meno anonime le manipolazioni formali cheabbiamo fatto, osserviamo come la somma calcolata per χVl⊗Vk(R(x)) puo essere inter-pretata come la somma per righe degli elementi del seguente rettangolo (dove, ovviamente,si prende come “valore” di una casella (a, b) il numero xa+b):Non ci credo neanche per
sbaglio che non sia pos-sibile fare questo schemain maniera un po’ piucristiana 170

(−l, k) (−l + 2, k) (−l + 4, k) (−l + 6, k) · · · (l, k)(−l, k − 2) (−l + 2, k − 2) (−l + 4, k − 2) (−l + 6, k − 2) · · · (l, k − 2)
.
.
.
.
.
.
.
.
.
.
.
.. .
....
(−l,−k) (−l + 2,−k) (−l + 4,−k) (−l + 6,−k) · · · (l,−k)
Invece la somma calcolata per χ⊕qj=0 Vk+l−2j
(R(x)) corrisponde in buona sostanza alla
somma calcolata sullo stesso rettangolo in questo modo:(−l, k) ← (−l + 2, k) ← (−l + 4, k) ← (−l + 6, k) ← · · · ← (l, k)↓
(−l, k − 2) (−l + 2, k − 2) ← (−l + 4, k − 2) ← (−l + 6, k − 2) ← · · · ← (l, k − 2)↓ ↓
(−l, k − 4) (−l + 2, k − 4) (−l + 4, k − 4) ← (−l + 6, k − 4) ← · · · ← (l, k − 4)↓ ↓ ↓...
.
.
.
.
.
.
.
.
....
.
.
.(−l,−k) (−l + 2,−k) (−l + 4,−k) (−l + 6,−k) · · · ← (l,−k)
Esercizio 32.3. Dimostrare che
Wl ⊗Wk = ⊕qj=0Wk+l−j,
con q = min(l, k).
Dimostrazione. Basta scrivere Wl = V2l e Wk = V2k per ottenere la formula di prima.
32.3 Prodotto tensoriale di rappresentazioni
Studieremo ora alcune proprieta generali del prodotto tensoriale di rappresentazioni.L’obiettivo finale e riuscire a capire come sia fatto Λ2Vn.
Lemma 32.4. Se V e uno spazio vettoriale su un campo di caratteristica 0 (cioe nelquale sommando 1 un numero finito di volte non si ottiene mai 0), V ⊗ V e isomorfo aS2V ⊕ Λ2V .
Dimostrazione. La seguente funzione e un isomorfismo:
f :S2V ⊕ Λ2V −→ V ⊗ V
(ei · ej , ek ∧ el) 7−→ (ei ⊗ ej + ej ⊗ ei) + (ek ⊗ el − el ⊗ ek)
La buona definizione e piuttosto immediata da verificare (e sufficiente osservare chef preserva le relazioni che sussistono tra gli elementi della potenza simmetrica e dellapotenza esterna). Altrettanto evidente e la linearita.
Per dimostrare l’invertibilita della f e utile dare un’interpretazione intuitiva del si-gnificato della funzione. Possiamo pensare che un elemento di V ⊗ V sia una matricequadrata M = (mij) di ordine n = dimV , in cui l’elemento mij rappresenta il coefficientedi M rispetto all’elemento ei⊗ej. Risulta evidente che l’immagine secondo la f di S2V ⊕0e l’insieme delle matrici simmetriche e che l’immagine di 0⊕Λ2V e l’insieme delle matriciantisimmetriche.
Verificare che queste proiezioni sono isomorfismi sull’immagine e immediato (sappiamocome sono fatte le basi di S2V e Λ2V ). Sappiamo inoltre che lo spazio delle matriciquadrate e somma diretta degli spazi delle matrici simmetriche e di quelle antisimmetriche(in quanto l’unica matrice contemporaneamente simmetrica e antisimmetrica e quellanulla). Ricordiamo, in particolare, che la scomposizione si puo ottenere tramite le formule:
S =M +MT
2, A =
M −MT
2,
dove S e simmetrica e A antisimmetrica.
171

In seguito, i vettori dell’immagine di S2V ⊕ 0 verranno anche chiamati simmetrici,mentre quelli nell’immagine di 0 ⊕ Λ2V verranno detti alternanti. Inoltre, tutte le volteche si parlera di S2V o Λ2V questi verranno considerati immersi in V ⊗ V secondo leapplicazioni precedenti.
Consideriamo ora l’applicazione:
τ :V ⊗ V −→ V ⊗ Vei ⊗ ej 7−→ ej ⊗ ei
.
L’autospazio relativo all’autovalore 1 e S2V , mentre l’autospazio relativo a −1 e Λ2V .
Lemma 32.5. Se un gruppo G agisce su V , l’azione indotta su V ⊗ V e l’applicazione τcommutano. In particolare, S2V e Λ2V sono sottorappresentazioni di V ⊗ V .
Dimostrazione. Dobbiamo dimostrare che per ogni g ∈ G le applicazioni τg e gτ coinci-dono. E sufficiente provarlo su un insieme di generatori, nel nostro caso sui vettori dellaforma v ⊗ w:
τg(v ⊗ w) = τ(gv ⊗ gw) = gw ⊗ gv = g(w ⊗ v) = gτ(v ⊗ w).
Visto che τ e G commutano, gli autospazi di τ sono G-invarianti, cioe per ogni g,g(S2V ) ⊂ S2V e g(Λ2V ) ⊂ Λ2V . Dunque la composizione tra la rappresentazione suV ⊗V e le proiezioni su S2V e Λ2V danno rispettivamente rappresentazione di G su S2Ve su Λ2V .
32.4 Struttura di Vn ⊗ VnNel nostro caso, vogliamo studiare Vn ⊗ Vn ∼=
⊕ni=0 V2i (esercizio precedente) e, in parti-
colare, vogliamo sapere quali rappresentazioni della somma sono incluse in Λ2V e qualiin S2V .
Osserviamo che se Vk e Λ2V hanno intersezione non banale, allora Vk ⊂ Λ2V percheVk ∩ Λ2V e sottospazio SU(2)-invariante di Vk.
Siano p0, . . . , pn la base di Vn descritta nella sezionesec:irriducibili-su231.2, ρ : SU(2) → GL(Vn) la
rappresentazione irriducibile, R come definita nella formula (eqn:immersione-s1-su232.2). Abbiamo visto che i
pk sono autovettori della rappresentazione tali che:[ρ(R(eiθ))
](pk) = e(n−2k)θpk.
Pertanto:[ρ(R(eiθ))
](pj ⊗ pk) = ei(n−2j)θpj ⊗ ei(n−2k)θpk = ei(n−2(j+k))θpj ⊗ pk.
Teorema 32.6. Per ogni j non negativo per il quale le seguenti scritture abbiano senso,vale che V2n−4j ⊂ S2V e V2n−4j−2 ⊂ Λ2V .
Dimostrazione. Passo base: si vede che ρ(R(θ))(f0 ⊗ f0) = e2inθf0 ⊗ f0. Dato che que-sto e un autovettore di ρ(R(θ)) con autovalore e2inθ e che l’unica delle rappresentazioniirriducibili che contengono questo autovalore e V2n, devo concludere che f0 ⊗ f0 ∈ V2n.
172

Ma questo vettore appartiene anche a S2V , perche τ(f0 ⊗ f0) = f0 ⊗ f0. Ho trovato unaintersezione non banale tra V2n e S2V , quindi V2n ⊂ S2V .
Primo passo induttivo: Ora studiamo i vettori corrispondenti all’autovalore ei(2n−2)θ.Questi sono < f0 ⊗ f1, f1 ⊗ f0 >, dove < ·, · > indica lo span, perche si deve avere che−2j−2k = −2, cioe (j, k) = (1, 0) o (j, k) = (0, 1). Non ci sono altri perche la base fi⊗fje formata da autovettori con autovalori tutti diversi da quello cercato.
In questo autospazio posso cambiare base e considerare i vettori f0 ⊗ f1 − f1 ⊗ f0,f0 ⊗ f1 + f1 ⊗ f0. Dato che gli autovalori di V2k sono e2i(k−j)θ per ogni j tra 0 e 2k, gliunici spazi della somma diretta a destra che possono (e devono) contenere questi vettorisono V2n e V2n−2. Posso addirittura sostenere che il secondo dei due vettori appartiene aV2n perche e l’unico simmetrico e per il passo base V2n e formato da vettori simmetrici.
Il primo vettore appartiene quindi sia a V2n−2 sia a Λ2V , quindi l’intersezione traquesti due spazi e non banale e V2n−2 ⊂ Λ2V .
Secondo passo induttivo: Ora studiamo i vettori corrispondenti all’autovalore ei(2n−4)θ.Questi sono < f0⊗f2, f1⊗f1, f2⊗f0 > (la somma dei due indici deve essere 2). Scelgo labase f0⊗ f2− f2⊗ f0, f1⊗ f1 f0⊗ f2 + f2⊗ f0. Di questi, uno sta in V2n, uno in V2n−2 e ilterzo in V2n−4. In particolare, uno di quelli simmetrici sta in V2n (o il secondo o il terzo,non importa sapere quale), mentre il primo che e alternante sta in V2n−2.
Ne rimane uno simmetrico che appartiene a V2n−4, quindi V2n−4 ⊂ S2V .
Passo induttivo generale (non fatto da Callegaro): Supponiamo la tesi vera per V2(n−j)∀j <k. Studiamo i vettori corrispondenti all’autovalore e2i(n−k))θ. Questi sono< fl⊗fk−l >0≤l≤k.
Se k e dispari, scelgo la base formata dai vettori del tipo fl ⊗ fk−l − fk−l ⊗ fl efl ⊗ fk−l + fk−l ⊗ fl con 0 ≤ l < k
2(sono k + 1 di cui k+1
2simmetrici e altrettanti
alternanti).Di questi, uno sta in V2n, uno in V2n−2, e cosı via fino a V2(n−k). Per ipotesi induttiva,
da V2n a V2(n−k+1) ho k+12
rappresentazioni irriducibili in S2V (tutti i valori pari di j tra0 e k − 1) e le altre k−1
2in Λ2V .
L’ultimo vettore e quindi alternante e sta in V2(n−k), quindi V2(n−k) ⊂ Λ2V .
Se k e pari, scelgo la base formata dai vettori del tipo fl⊗ fk−l− fk−l⊗ fl, fk/2⊗ fk/2e fl ⊗ fk−l + fk−l ⊗ fl con 0 ≤ l < k
2(sono k di cui k
2+ 1 simmetrici e k
2alternanti). Di
questi, uno sta in V2n, uno in V2n−2, e cosı via fino a V2(n−k). Per ipotesi induttiva, da V2n
a V2(n−k+1) ho k2
rappresentazioni irriducibili in S2V (tutti i valori pari di j tra 0 e k− 1)e altrettante in Λ2V .
L’ultimo vettore e quindi simmetrico e sta in V2(n−k), quindi V2(n−k) ⊂ Λ2V . Il passoinduttivo e concluso.
Abbiamo ottenunto quindi che S2Vn ∼= V2n ⊕ V2n−4 ⊕ ...⊕ Vnmod2 (l’ultimo e cioe 0 sen e multiplo di 4, 1 altrimenti). Inoltre Λ2Vn ∼= V2n−2 ⊕ V2n−6 ⊕ ...⊕ V(n−2)mod2.
173

32.5 Rappresentazioni dei prodotti
Date le rappresentazioni di due gruppi G e H, si vogliono studiare le rappresentazioni diG×H.
Nel caso dei gruppi finiti, possiamo calcolare la cardinalita di queste rappresentazioni,dando per scontato che #Irr(G,C) = #CG, dove Irr(G,C) indica le rappresentazionicomplesse irriducibili di G, CG le classi di coniugio di G. Le classi di coniugio del prodottosono i prodotti delle classi di coniugio, perche denotando a ∼ b⇔a e coniugato a b:
(g, h) ∼ (g′, h′)⇔ ∃g, h : (g, h)−1(g, h)(g, h) = (g′, h′)
⇔ (g−1gg, h−1hh) = (g′, h′)⇔ g−1gg = g′, h
−1hh = h′
Pertanto:
#Irr(G×H,C) = #CG×H = #CG ∗#CH = #Irr(G,C) ∗#Irr(H,C)
A questo punto, siano Vρ, Wσ rappresentazioni: faccio agire G×H su Vρ ⊗Wσ (nonotterro il prodotto tensore di applicazioni, ma un nuovo prodotto che denoteremo conVρ Wσ). Definisco infine (ρ σ)(g, h)(v ⊗ w) = ρg(v)⊗ ρh(w).
Proposizione 32.7. Se Vρ e Wσ sono rappresentazioni irriducibili, allora anche VρWσ
e irriducibile.
Dimostrazione. Calcolo il prodotto scalare di questo carattere con se stesso (si da perscontato che valga il teorema di Fubini-Tonelli per cui posso calcolare l’integrale a fette):
< χVρWσ |χVρWσ >=
∫G×H
χVρWσ(g, h)χVρWσ(g, h)d(g, h) =
=
∫H
[∫G
χρ(g)χρ(h)χρ(g)χρ(h)dg
]dh =
(∫G
χρ(g)χρ(g)dg
)(∫H
χρ(h)χρ(h)dh
)= 1
Proposizione 32.8. Tutte le rappresentazioni irriducibili di G × H sono della formaprecedentemente descritta.
Dimostrazione. Verra fatta nella prossima lezione.
174

Capitolo 33
Trentatreesima lezione (AngeloVistoli, 21/04/2010)
33.1 Potenza esterna di una rappresetnazione
Siano dati un gruppo G, un intero k > 0 ed una rappresentazione ρ : G→ GL(Vρ) sullospazio vettoriale Vρ di dimensione n.
Definizione 33.1. Λkρ : G → GL(ΛkVρ
)e la rappresentazione definita da
(Λkρ
)(s) =
Λk(ρ(s)).
Osservazione 33.2. Il grado di Λkρ e deg(Λkρ) = dim(ΛkVρ) =
(n
k
)Esempio 33.3. Λnρ e la rappresentazione di grado 1 data da Λnρ : s 7→ detρ(s)∀s ∈ G.
La rappresentazione Λ1ρ e chiaramente isomorfa a ρ. Studieremo percio Λ2ρ; in par-ticolare, vogliamo costruire il carattere di questa rappresentazione. Per farlo, cerchiamo,dato uno spazio vettoriale di dimensione finita V ed un’applicazione lineare diagonaliz-zabile f : V → V , di ricavare trΛ2f . Essendo f diagonalizzabile, scegliamo una basev1, . . . , vn di autovettori relativi agli autovalori λ1, . . . , λn (non necessariamente distin-ti). Sappiamo che una base di Λ2V e data dai vettori del tipo vi ∧ vj con i < j. Vediamocome si comporta Λ2f sui vettori di questa base: Λ2f(vi∧vj) = f(vi)∧f(vj) = λiλj(vi∧vj).La matrice che rappresenta Λ2f in questa base e quindi diagonale ed ha gli autovalori λiλjcon i < j. Si ha allora tr (Λ2f) = Σi<jλiλj = 1
2
[(Σiλi)
2 − Σiλ2i
]= 1
2((trf)2 − tr(f 2)).
Otteniamo quindi per i caratteri la relazione
XΛ2ρ(s) =1
2
(Xρ(s)
2 − Xρ(s2))
.
Esercizio 33.4. 1. Date le rappresentazioni irriducibili di S4, come definite in RIFE-RIMENTO, dimostrare che Λ2σ = ε. Come e fatta Λ2ρ?
2. Data una rappresentazione ρ, con degρ = 3, dimostrare che Λ2ρ ≈ det(ρ)ρ∗.
3. Piu in generale, se degρ = n, Λn−1ρ ≈ det(ρ)ρ∗
175

Esercizio 33.5. Sia π : Vρ ⊗ Vρ → Λ2Vρ tale che π(v ⊗ w) = v ∧ w. π e canonica,suriettiva ed e omomorfismo di rappresentazioni.
Proposizione 33.6. Data una rappresentazione ρ con degρ > 1, ρ2 non e irriducibile.
Dimostrazione. Consideriamo la π dell’esercizio precedente. dim(Ker(π)) = n2−(n
2
)=
n2− n(n− 1)
2=n(n+ 1)
2. Kerπ e un sottospazio invariante per Vρ⊗ Vρ e la sua dimen-
sione e strettamente compresa tra 0 ed n2, quindi ρ2 ammette un sottospazio non banaleinvariante.
Vogliamo Consideriamo l’azione di C2 = 1, h su Vρ ⊗ Vρ definita da h(v ⊗ w) =w ⊗ v ∀v, w ∈ Vρ (e immediato constatare che h2 = Id). Possiamo quindi scomporreVρ ⊗ Vρ nei due autospazi: Vρ ⊗ Vρ = (Vρ ⊗ Vρ)+ ⊕ (Vρ ⊗ Vρ)−. Cominciamo a notare cheh e un omomorfismo di rappresentazioni, mostriamo infatti che vale: h ρ2
(s) = ρ2(s) h∀s.
(h ρ2(s))(v⊗w) = h(ρ(s)v ⊗ ρ(s)w) = ρ(s)w ⊗ ρ(s)v = ρ2
(s)(w ⊗ v) = ρ2(s)(h(v⊗w))
Quindi i due autospazi sono h− invarianti e possiamo condiderare la restrizione a (Vρ⊗Vρ)+ e (Vρ⊗Vρ)− come sottorappresentazioni. Avevamo gia visto che dato un x ∈ Vρ⊗Vρ,questo e sconponibile nelle due componenti simmetrica e antisimmetrica, in pratica x =x+hx
2+ x−hx
2, cioe w ⊗ v = w⊗v+v⊗w
2+ w⊗v−v⊗w
2
Abbiamo cosı ottenuto le due proiezioni di Vρ⊗Vρ in Λ2Vρ e S2Vρ. Infatti l’applicazioneVρ ⊗ Vρ → Λ2Vρ ⊕ S2Vρ e un isomorfismo che fa corrispondere Λ2Vρ a (Vρ ⊗ Vρ)− e S2Vρa (Vρ ⊗ Vρ)+ e possiamo finalmente scrivere la scomposizione
ρ2 = S2ρ+ Λ2ρ
e ancora considerando i caratteri
XS2ρ
= X2ρ − XΛ2
ρ
XS2ρ(s) = (Xρ(s))
2 − 1
2(X2
ρ(s)− Xρ(s2))
=1
2(X2
ρ(s) + Xρ(s2)) (33.1)
33.2 tabella dei caratteri di S5
Proviamo ora a costruire la tabella dei caratteri di S5, abbiamo 7 classi di coniugio epossiamo cominciare a scrivere i caratteri dell’identita e della rappresentazione segno,facili da determinare
1 10 20 30 24 15 20S5 id (12) (123) (1234) (12345) (12)(34) (12)(345)1 1 1 1 1 1 1 1ε 1 -1 1 -1 1 1 -1
176

Possiamo poi trovare facilmente altre due rappresentazioni irriducibili considerandol’azione di S5 come rappresentazione per permutazione e scomporla in 1 + ρ, calcolando(Xρ|Xρ) troviamo che ρ e irriducibile, allora anche ερ e irriducibile. Inseriamole nellatabella
1 10 20 30 24 15 20S5 id (12) (123) (1234) (12345) (12)(34) (12)(345)ρ 4 2 1 0 -1 0 1ερ 4 -2 1 0 -1 0 -1
Abbiamo trovato 4 rappresentazioni irriducibili di S5, quindi ne mancano altre 3 (de-vono essere tante quante le classi di coniugio), proviamo con Λ2
ρ e S2ρ e calcoliamone i
caratteri grazie alle relazioni di prima:1 10 20 30 24 15 20
S5 id (12) (123) (1234) (12345) (12)(34) (12)(345)Λ2ρ 6 0 0 0 1 -2 0
S2ρ 10 4 1 0 0 2 1
Possiamo immaginare subito che S2ρ non sara irriducibile (ha grado 10 e ricordiamo che
la somma dei gradi al quadrato delle rappresentazioni irriducibili deve dare |G| = 120),invece scopriamo che Λ2
ρ e irriducibile(XΛ2
ρ|XΛ2
ρ
)=
1
120(36 + 24 + 15 ∗ 4) = 1
Sommando i gradi al quadrato delle rappresentazioni irriducibili trovate finora simoarrivati a 70(1+1+16+16+36), quindi ne dobbiamo trovare altre due tali che d2
1 +d22 =
120−70 = 50; le uniche combinazioni possibili sono 52+52 oppure 12+72, ma quest’ultimae facilmente escludibile, dobbiamo quindi cercare due rappresentazioni di grado 5. Aquesto punto potremmo aspettarci che S2
ρ (che aveva grado 10) sia scomponibile in duesottorappresentazioni irriducibili di grado 5, che sarebbero proprio quelle che cerchiamo,invece... (
X§2ρ|X§2ρ)
=1
120(100 + 16× 10 + 1× 20 + 4× 15 + 1× 20) = 3
che significa che dobbiamo scomporla in 3 sottorappresentazioni irribucibili, poiche (Xρ|Xρ) =∑n2i e l’unico modo per ottenere 3 e 1+1+1, in parole povere l’idealismo e una stronzata!
177

178

Capitolo 34
Trentaquattresima lezione (FilippoCallegaro, 27/04/2010)
34.1 Previously on Callegaro
Ricordiamo che la scorsa puntata di Filippo si era conclusa con le rappresentazioni deiprodotti diretti di due gruppi. Ricapitoliamo velocemente quel che e successo.
Nel corso di questa lezione indichero con G e H due gruppi compatti (o piu in generalele cui rappresentazioni siano tutte semisemplici), e chiamero le generiche rappresentazionidi G e H nel seguente modo.
ρ : G→ GL(Vρ)
λ : H → GL(Wλ)
Indichiamo inoltre con Vi = Irr(G,C) le rappresentazioni irriducibili di G su spazivettoriali su C, e con Wi = Irr(H,C) quelle di H. S’era visto che date due rappresen-tazioni Vρ e Wλ rispettivamente di G e H si puo costruire una rappresentazione sul loroprodotto tensoriale di G×H, denotata con Vρ Wλ:
ρ λ : G×H → GL(Vρ ⊗Wλ)
che sui generatori agisce nel seguente modo:
(ρ λ)(g,h)(v ⊗ w) = (ρg(v))⊗ (λh(w))
La rappresentazione Vρ Wλ e irriducibile per quanto visto nella scorsa lezione.
Adesso ci proponiamo di dimostrare che ogni rappresentazione di G × H e sommadiretta di rappresentazioni del tipo Vρ Wλ, e che quindi Irr(G×H,C) = Irr(G,C)Irr(H,C).
NOTA: in realta dimostreremo che ogni rappresentazione di grado finito di G × He somma diretta di rappresentazioni di quel tipo (perche ad un certo punto useremoun conto sulle dimensioni degli spazi vettoriali). Se trovate un modo per sistemare ladimostrazione anche per spazi di dimensione infinita (o se per caso le rappresentazioniirriducibili dei gruppi compatti hanno grado finito) fatemelo sapere.
179

34.2 Rappresentazioni di prodotti diretti
Teorema 34.1. Data U rappresentazione di grado finito di G×H (con G e H compatti),allora U puo essere decomposta come somma diretta di rappresentazioni del tipo VρWλ,ove Vρ e Wλ sono rappresentazioni semplici rispettivamente di G e di H.
Dimostrazione. Chiamiamo σ la rappresentazione di U
σ : G×H → GL(U)
Possiamo innanzitutto vedere U come rappresentazione di H attraverso la composizionecon l’immersione.
H → G×H → GL(U)
Allora U e semisemplice come H-rappresentazione, percio come H-rappresentazioneabbiamo che
U ∼=H
⊕j
W⊕njj
Poiche avevamo gia visto che nj = dim(HomH(Wj, U)), allora come spazi vettoriali
si ha che⊕
jW⊕njj∼=⊕
j HomH(Wj, U)⊗Wj.
Osservazione 34.2. Con W⊕njj s’intende la somma diretta Wj ⊕ . . .⊕Wj di nj copie di
Wj.Si usa questa notazione per non confondere la somma diretta con il prodotto diretto.
Cio che vorremmo dimostrare e che
U ∼=⊕j
HomH(Wj, U)⊗Wj
come G×H-rappresentazioni.Sappiamo gia come agisce G×H su U . Dobbiamo pero ancora specificare come agisce
sullo spazio vettoriale a destra dell’uguale (il bestio). Una volta fatto questo cercheremodi trovare una funzione ϕ da uno nell’altro e di dimostrare che e un isomorfismo diG×H-rappresentazioni.
Chiamiamo:
η : G×H → GL(⊕j
HomH(Wj, U)⊗Wj)
Ci basta definire come agisce η sui generatori del bestio. Percio preso un elementof ⊗ w ∈ HomH(Wj, U)⊗Wj, definiamo che:
η(g,h)(f ⊗ w) = (σ(g,h) f λg−1)⊗ λh(w)
dove con λ indico la rappresentazione irriducibile di H su Wj, che c’e perche il Wj
l’avevamo preso apposta tra le rappresentazioni irriducibili di H.Per essere un po’ meno formali stiamo semplicemente dicendo che sui Wj H agisce
in modo naturale (li avevamo presi come rappresentazioni di H), mentre G agisce in
180

modo banale, e l’azione sul prodotto tensore f ⊗ w e semplicemente l’azione naturale(g, h) f (g, h)−1 ⊗ (g, h) · w, ma, visto che G agisce banalmente su Wj, che e sia lospazio in cui vive w sia lo spazio di partenza degli omomorfismi a sinistra del prodottotensore, allora (g, h)(w) = hw e (g, h) f (g, h)−1 = (g, h) f h−1, dove con un abusodi notazione ho identificato g con (g, 1) ∈ G×H e h con (1, h) ∈ G×H.
NOTA: in seguito indichero con σg e σh rispettivamente σ(g,1) e σ(1,h), chiamandoquindi σ anche le composizioni:
G → G×H → GL(U)
H → G×H → GL(U)
Torniamo alla definizione dell’azione di G×H su⊕
j HomH(Wj, U)⊗Wj. Abbiamodetto che:
η(g,h)(f ⊗ w) = σ(g,h) f λh−1 ⊗ λh(w)
η(g,h)(f ⊗ w) = σg (σh f λ−1h )⊗ λh(w)
da cui, ricordando che f e omomorfismo di H-rappresentazioni, si ottiene che:
η(g,h)(f ⊗ w) = σg f ⊗ λhw
Per verificare la buona definizione di η(g,h) basta usare la proprieta universale delprodotto tensore (costruendo una funzione da HomH(Wj, U) ×Wj bilineare e poi fatto-rizzando la mappa tramite il prodotto tensore).
L’unica cosa che dobbiamo vedere e che σg f ∈ HomH(Wj, U).Sicuramente σgf ∈ Hom(Wj, U), perche f ∈ Hom(Wj, U) e σg ∈ GL(U). Dobbiamo
verificare che sia omomorfismo di H-rappresentazione, cioe che commuti con l’azione diH. Ma questa e una facile verifica:
σh (σg f) λ−1h = (σ(1,h) σ(g,1)) f λ−1
h = σ(g,h) f λ−1h =
= σ(g,1) σ(1,h) f λ−1h = σg (σh f λ−1
h ) = σg f
Adesso che abbiamo definito l’azione di G×H su⊕
j HomH(Wj, U)⊗Wj, definiamouna mappa da quest’ultimo in U in modo tale che sia un isomorfismo di rappresentazioni.
Per definire questa funzione come al solito basta definirla sui generatori ed esternderlaper linearita.
ϕ :⊕j
HomH(Wj, U)⊗Wj → U
ϕ : f ⊗ w 7→ f(w)
phi e una funzione lineare (proprieta universale dei prodotti tensori). Dobbiamo veri-ficare che e iniettiva e suriettiva (cioe isomorfismo di spazi vettoriali) e che commuta conl’azione di G×H (cioe e omomorfismo di G×H-rappresentazioni).
Notiamo prima di procedere che non e necessario verificare sia l’iniettivita che lasuriettivita di phi, perche (assumendo che U sia di dimensione finita) la dimensione di U edi⊕
j HomH(Wj, U)⊗Wj e la stessa (entrambi infatti, per quanto detto precedentemente,
hanno dimensione uguale a quella della spazio vettoriale⊕
jW⊕njj ).
181

Verificheremo pertanto solamente che phi e suriettiva.Prendiamo un certo u ∈ U . Visto che U come spazio vettoriale e somma diretta⊕jW
⊕njj , possiamo decomporre u in modo unico come u = w1 + . . .+ wn. Basta quindi
che phi sia suriettiva su ciascun Wj.Vediamo che w1 sta nell’immagine di phi.Sicuramente U contiene una H-sottorappresentazione isomorfa a W1, con w1 apparte-
nente a questa sottorappresentazione (noi avevamo chiamato anche questa W1). Dunqueesiste un isomorfismo di H-rappresentazione (chiamiamolo θ) tra W1 visto in astrattoe W1 visto dentro U come H-rappresentazione (moralmente e l’identita di W1). Poichew1 appartiene al W1 visto dentro U , sta nell’immagine di θ, e dunque si puo scriverew1 = θ(y), con y ∈ W1 visto in astratto.
Ma allora, per la definizione che avevamo dato di ϕ, si ha che w1 = ϕ(θ⊗ y), e cosı edimostrata la suriettivita di ϕ.
Adesso manca soltanto da dimostrare che ϕ difnito come sopra e omomorfismo diG × H-rappresentazioni tra la rappresentazione σ e la rappresentazione η. Ricordiamoche η agisce nel seguente modo:
η(g,h)(f ⊗ w) = σg f ⊗ λhw
Verifichiamo che η commuta con ϕ (come sempre solo sui generatori).
ϕ η(g,h)(f ⊗ w) = ϕ((σg f)⊗ (λh(w))) = (σg f)(λh(w)) =
= σg f λh(w) = σg σh f(w) = σ(g,h) ϕ(f ⊗ w)
dove abbiamo usato che f λh = σh f , in quanto f ∈ HomH(Wj, U).Abbiamo allora dimostrato che come G×H-rappresentazioni
U ∼=⊕j
HomH(Wj, U)⊗Wj
dove G agisce in modo banale sui Wj e H agisce in modo banale su HomH(Wj, U),perche abbiamo visto che η(g,h)(f ⊗ w) = σg f ⊗ λhw.
A questo punto gli spazi vettoriali HomH(Wj, U) sono rappresentazioni solamente di
G, perche H agisce banalmente su di essi. Possiamo percio scomporli come⊕
i V⊕ni,ji .
Pertanto:
U ∼=⊕i,j
ni,jVi ⊗Wj
Ma, visto che σ si decompone nelle azioni di G sui Vi e di H sui Wj (perche H agiscebanalmente sui Vi, e G sui Wj), allora
U ∼=⊕i,j
ni,jVi Wj
che e la nostra tesi.
Osservazione 34.3. Come corollario abbiamo che Irr(G×H,C) = Irr(G,C)Irr(H,C).
182

34.2.1 Le rappresentazioni di O(3)
Quali sono le rappresentazioni di O(3)? Ricordando che come gruppo topologico O(3) ∼=SO(3)× Z2, possiamo trovare facilmente le sue rappresentazioni irriducibili.
Avevamo gia denotato con Irr(SO(3),C) = Wi.Per quanto riguarda Z2 = 1,−1, questo gruppo ha due classi di coniugio, percio due
rappresentazioni irriducibili, entrambe di grado 1. Una di queste e quella banale, l’altrae quella che manda −1 in −id. Chiamiamo ε1 e ε−1 queste due rappresentazioni. Allorasegue che:
Irr(O(3),C) = Wi εji∈N,j∈+1,−1
34.2.2 Le rappresentazioni di U(2)
Un’applicazione piu interessante riguarda le rappresentazioni di U(2).Innanzitutto dobbiamo capire a che cosa sia isomorfo U(2). La nostra speranza sarebbe
che U(2) ∼= S1 × SU(2). Purtroppo non e cosı, ma quasi.Prendiamo una mappa:
ψ : S1 × SU(2)→ U(2)
(eiθ, A) 7→ eiθI2 · A
ψ e ben definita, a valori in U(2), continua ed e un omomorfismo (le matrici commu-tano con i multipli dell’identita). Inoltre e suriettiva: infatti presa una matrice B ∈ U(2),si ha che B = det(B)I2 ·C, dove indico con C la matrice che ha la prima colonna uguale aB e la seconda uguale a B
det(B). Inoltre vale che det(B)I2 ∈ S1 mentre C ∈ SU(2), dunque
ψ e suriettiva.Dobbiamo quindi trovare solo il nucleo di questo omomorfismo e poi quozientare.Se (eiθ, A) ∈ ker(ψ), allora det(eiθI2 · A) = 1, cioe e2iθdet(A) = 1 (multilinearita del
determinante). Ma det(A) = 1, perche A ∈ SU(2). Percio eiθ puo essere solo +1 o −1.Da cio si deduce facilmente che gli unici due elementi del ker sono (1, I2) e (−1,−I2), cheformano un sottogruppo isomorfo a Z2.
Pertanto per il primo teorema di omomorfismo possiamo concludere che:
U(2) ∼= (S1 × SU(2))/Z2
A questo punto prendiamo una rappresentazione irriducibile di U(2) sullo spazio V .PER I MATEMATICI: solleviamo questa rappresentazione al rivestimento S1×SU(2)→
U(2) e otteniamo una rappresentazione irriducibile (se i sottospazi invarianti non c’eranoprima non ci sono neanche adesso).
PER I FISICI: possiamo vederla come rappresentazione di S1 e di SU(2) componen-dola a sinistra con l’immersione di S1 e di SU(2) tramite ψ ristretto ai due sottogruppiS1 × I2 e 1× SU(2).
ψ1 : S1 → GL(V )
ψ2 : SU(2)→ GL(V )
183

A questo punto possiamo fare la rappresentazione
β : S1 × SU(2)→ GL(V )
che agisce nel seguente modo
β(eiθ, A) = ψ1(eiθ) ψ2(A) = ψ2(A) ψ1(eiθ)
Osserviamo che questa definizione e ben posta perche l’immagine di S1 in U(2) so-no le matrici che sono multiple dell’identita e che quindi commutano con tutto. Allorapartendo da una rappresentazione di U(2) ne abbiamo ottenuta una di S1 × SU(2), chee ancora irriducibile (preso un sottospazio invariante, c’e un elemento B ∈ U(2) cheprende un vettore di questo sottospazio invariante e lo porta fuori, perche V era irri-ducibile come rappresentazione di U(2). Ma B possiamo vederlo come ψ(a, b), dunque(a, b) ∈ S1 × SU(2) agisce come B e quindi sposta fuori dal sottospazio invariante ilvettore che spostava anche B.
PER TUTTI: Percio da ogni rappresentazione irriducibile di U(2) troviamo una rap-presentazione irriducibile di S1×SU(2), che, per la buona definizione, deve essere costantesu ker(ψ) (cioe devono essere banali sul ker). Viceversa per ogni rappresentazione irri-ducibile di S1 × SU(2) che sia costante su ker(ψ) possiamo trovare quozientando per ilker una rappresentazione di U(2), ancora irriducibile perche come sopra (se prima non cisono sottospazi invarianti allora non ci sono neanche dopo).
Cioe abbiamo visto che le rappresentazioni irriducibili di U(2) sono i quozienti diquelle di S1 × SU(2) che sono banali sul ker. Ma le rappresentazioni di S1 × SU(2) leconosciamo, perche sono Irr(S1,C) Irr(SU(2),C).
Chiamiamo An|n ∈ Z = Irr(S1,C). An e tale che:
ρn : S1 → GL(An) = C∗
ρn(eiθ) = einθ
Notiamo che ρn(−1) = id se n e pari, mentre e uguale a −id se n e dispari.
Se invece consideriamo Vm = Irr(SU(2), C), dove Vm sono i polinomi a coefficientiin C in due variabili omogenei di grado m, allora −I2 agisce come idVm se m e pari, ecome −idVm se m e dispari.
Consideriamo ora la S1×SU(2)-rappresentazione An⊗Vm. Su di essa (−1,−I2) agiscebanalmente se e solo se m + n e pari: infatti si deve avere che sia −1 che −I2 agiscanobanalmente (in tal caso sia n che m devono essere pari), oppure che entrambi agiscanocome −id (e in tal caso sia n che m devono essere dispari).
Percio:
Irr(U(2),C) = An Vmn+m∈2Z
Osservazione 34.4. Durante questa lezione Callegaro ha usato l’espressione G-modulo.Essa e semplicemente un sinonimo di G-rappresentazione.
184

34.3 Armoniche sferiche
Denotiamo con Pl l’insieme dei polinomi, a coefficienti complessi, omogenei di grado l, intre variabili. Li vogliamo pensare come funzioni su R3. Ora, GL(3,R) agisce su R (piuo meno per definizione). Possiamo definire un’azione di GL(3,R) su Pl in questo modo:dato f ∈ Pl, v ∈ R3, A ∈ GL(3,R), poniamo
(Af)(v) = f(A−1(v))
Pl e chiaramente uno spazio vettoriale invariante per questa azione, per quanto nonirriducibile. Essendo invariante per GL(3,R), e chiaramente invariante anche per SO(3),ma anche per SO(3) non e in generale una rappresentazione irriducibile.
Ad esempio, x21 + x2
2 + x23 e SO(3)-invariante.
Definizione 34.5. L’operatore ∆ = ∂2
∂x21
+ ∂2
∂x21
+ ∂2
∂x21
e detto operatore laplaciano su R
Definizione 34.6. L’insieme Hl = f ∈ Pl : ∆f = 0 e l’insieme dei polinomi armonicidi grado l
Notiamo che, essendo polinomi omogenei, vedendoli come funzioni, sono completa-mante determinanti dal comportamento sulla sfera S2. In particolare, se considerati solosulla sfera S2, questi polinomi prendono il nome di armoniche sferiche.
Lemma 34.7. 1: dimPl = (l+1)(l+2)2
2: dimHl = 2l + 1
Dimostrazione. 1: Con una sola variabile, si ha chiaramente un solo monomio possibile,xl1. Aggiungendo una seconda variabile, si hanno in tutto l + 1 monomi diversi, distinti,ad esempio, dalla potenza della prima variabile, che puo variare tra 0 ed l. Dunque, imonomi di grado l di tre variabili sono
∑li=0 i+ 1, dove l’indice della somma indica, delle
l variabili presenti in un monomio, quante sono occupate da x1 e x2. La somma diventaquindi
∑l+1i=1 i = (l+1)(l+2)
2.
2: Un generico polinomio di Hl e della forma f(x1, x2, x3) =∑l
k=0xk1k!fk(x2, x3), dove
fk(x2, x3) indica un polinomio in x2 ed x3 di grado n− k.
Il laplaciano e ∆f =∑l−2
k=0xk1k!fk+2(x2, x3)+
∑lk=0
xk1k!
(∆fk(x2, x3)). Se poniamo ∆f = 0,posso eguagliare le due somme termine a termine. Trovo cosı fk+2(x2, x3) = ∆fk(x2, x3),con 0 ≤ k ≤ l − 2. Da cio segue che tutti i polinomi sono determinati da f0 ed f1. Ilprimo e omogeneo, in due variabili, di gradi l, ed ha quindi l + 1 parametri, il secondoe omogeneo, in due variabili, di grado l − 1, ed ha quindi l parametri. Quindi in totaleabbiamo 2l + 1 gradi di liberta, da cui la dimensione.
Osservazione 34.8. Con k = l, l − 1 e automatico, dato che fk ha grado 0 o 1 ed equindi a laplaciano nullo. I casi l = 0 e l = 1 si sistemano a mano.
Lemma 34.9. ∆ e SO(3)-invariante.
Dimostrazione. Lasciata per esercizio.
185

Corollario 34.10. Hl SO(3)-invariante.
Dimostrazione. Su Hl ∆ fa zero.
L’ultima proposizione devo ancora farla, manca solo questa e la lezione finisce.
Proposizione 34.11. Hl∼= Wl
Dimostrazione. Innanzitutto notiamo che entrambi gli spazi in questione hanno dimen-sione 2l + 1. Inoltre ricordiamo che Wl
∼= V2l. L’idea della dimostrazione e di scomporrelo spazio Hl in una somma
⊕i niWi e di mostrare che per ni 6= 0 per almeno un indice
i ≥ l. Poi concludiamo per cardinalita.Abbiamo un’azione σ : SO(3) → GL(n,R), con n = 2l + 1, ossia il numero dei
coefficienti dei polinomi di grado l. Inoltre abbiamo anche ρ : SU(2) → SO(3) (quelladi ottobre). Componendole, abbiamo un’applicazione da SU(2) a GL(n,R), che andiamoora a studiare.
Per quanto riguarda ρ:
ρ :
(eiθ/2 0
0 e−iθ/2
)7→
e1
cosθ sinθ−sinθ cosθ
(34.1)
Vediamo come agisce questo elemento di SO(3) su una particolare funzione armonica,di grado l, ossia (x2 + ix3)l. Abbiamo
1cosθ sinθ−sinθ cosθ
•(x2+ix3)l = (cosθx2−sinθx3+isinθx2+icosθx3)l = (eiθx2+1eiθx3)l = eilθ = eilθ(x2+ix3)l
(34.2)Abbiamo dunque trovato un autovettore con autovalore 2l (ricordiamo che l’angolo
iniziale era θ/2). Quindi ∃i tale che ni 6= 0, i ≥ l. Da cio segue la tesi, per quanto dettoall’inizio della dimostrazione.
186

Capitolo 35
Trentacinquesima lezione (AngeloVistoli, 28/04/2010)
Esercizio 35.1. Finire di calcolare la tabella dei caratteri di S5 .
(secondo me andrebbe messo in fondo alla lezione precedente)
Esercizio 35.2. Calcolare la tabella dei caratteri di A5.
35.1 Classi di coniugio di A5
A5 e un gruppo di 60 elementi, contenente le permutazioni pari di 5 elementi. E’ ungruppo semplice, cioe non ha sottogruppi normali non banali. E’ inoltre il piu piccologruppo semplice non abeliano (nota per gli appassionati: esiste anche il piu grande grupposemplice non abeliano, si tratta di uno schifo soprannominato dagli addetti ai lavori ilmostro).La principale difficolta sta nel trovare le classi di coniugio di A5. Il problema e che 2elementi coniugati in Sn possono non esserlo in An. Per trovare le classi di coniugioconsideriamo l’azione di Sn su Sn per coniugio:
Sn → S(Sn)
s→ (t→ sts−1)
con t ∈ Sn. Ne segue che la classe di coniugio di t e l’orbita di t per questa azione.Indichiamo con Ht = s ∈ Sn|sts−1 = t lo stabilizzante dell’elemento t. Come abbiamogia visto in precedenza:
|Ωt| =|Sn||Ht|
Consideriamo ora t ∈ An e indichiamo con Ω′t la classe di coniugio di t in An. OvviamenteΩ′t ⊂ Ωt, ma in generale non vale l’inclusione inversa. Indichiamo con H ′t lo stabilizzatoredi t in An. E facile verificare che H ′t = Ht∩An. La formula per la cardinalita di Ω′t diventaallora:
|Ω′t| =|An|
|Ht ∩ An|=
|Sn|2|Ht ∩ An|
A questo punto si presentano due casi:
187

1. Ht ⊆ An; in questo caso si ha che
|Ω′t| =|Ωt|2
2. Ht ( An; in questo caso Ht∩An = Ker (Sn ⊇ Htsgn7−→ ±1). Poiche in un omomor-
fismo di gruppi f : G→ H la cardinalita del nucleo e dell’immagine sono legati dallarelazione |G| = |Ker f | Im f |, deduciamo che |Ht ∩ An| = |Ht|
2, da cui |Ω′t| = |Ωt|.
35.2 Avvicinandosi ai gruppi di Lie
I gruppi di Lie sono gruppi che hanno una precisa struttura geometrica, per avere un’idea,sono varieta differenziabili in uno spazio euclideo Rn. Introduciamo ora un po’ di nota-zione. Sia Ω ⊂ Rn un aperto e f : Ω→ Rm una funzione C∞. Indichiamo il differenzialedi f nel punto p ∈ Ω con dpf e con Jp(f) la matrice Jacobiana
(Jp(f))ij =∂fi∂xj
(p)
Si da per noto il seguente:
Teorema 35.3. Sia γ : (a, b)→ Ω, C∞ e t0 ∈ (a, b) con
γ′(t0) = (γ′1(t0), ..., γ′n(t0)) = v
Allora
dpf =d
dtf(γ)(t0)
Esempio 35.4. Mn(Rn) ' Rn2
det : Mn(R)→ R
Si verifica che il differenziale del determinante valutato nell’identita di Rn e la traccia:
dIndet : Mn(Rn)→ R
dIndet = tr
Basta calcolare dIndet(X) che si potrebbe fare anche a mano visto che il determinantee una funzione polinomiale nelle entrate. Preferiamo pero usare il teorema enunciatoprecedentemente. Definiamo γ : (−ε, ε) → Rn, γ(t) = In + tX. Risulta che γ′(0) = X.Ora:
det(In + tX) = det(t(Int
+X)) =
= tndet(Int
+X) =
= tn(1
tn+
1
tn−1trX + ...+ det(X)) = (35.1) polinomio
= 1 + t tr(X) + t2(.....)
188
Dove per (polinomio35.1) abbiamo usato la formula per il polinomio caratteristico notando che
det( Int
+X) = det(−λIn +X) con la sostituzione λ = −1t. Derivando det γ rispetto a t
si ha che:d
dt(det(In + tX))(0) = tr(X)
Segue immediatamente dal Teorema1 che
dIndet(X) = tr(X)
35.2.1 Regola della catena
Sia U aperto di Rn e V aperto di Rm; siano f : U → V , g : V → Rs differenziabili, congf : U → Rs ben definita. Preso p ∈ U si ha che gf e differenziabile e
dpgf = df(p)g dpf
Esempio 35.5. Calcoliamo ora il differenziale del determinante valutato in una matricedel gruppo lineare. A ∈ GLn(R). Definiamo LA : Mn(R) → Mn(R) tale che LA(X) =AX. Ovviamente abbiamo che dBLA = LA in quanto LA e lineare. La stessa cosa seconsideriamo RA : Mn(R) → Mn(R) con RA(X) = XA e dBRA = RA. Valutiamo
dA(det LA−1). Da un parte per Binet e uguale a dAdet(X)detA
e dall’altra usando la re goladella catena vale
dLA−1 (A)det dALA−1 = tr(A−1X)
da cui si ricava chedAdet(X) = det(A)tr(A−1X)
35.3 Teorema della mappa implicita
Teorema 35.6. Ω ⊆ Rn aperto, f : Ω → Rm di classe C∞. f(p) = 0. Supponiamo chedpf : Rn → Rm sia suriettivo. Allora esiste un intorno U di p in Ω tale che f−1(0)∩U eil grafico di una funzione C∞ da un aperto di Rd in Rm con d = n−m.
Osservazione 35.7. Supponiamo che il minore costituito dalle ultime d colonne sia in-vertibile. Allora esiste ϕ di classe C∞ ϕ : V → Rm dove V e aperto in Rd tale che ∃U ⊆ Ωcon p ∈ U tale che il grafico di ϕ e (x, ϕ(x)) ∈ V × Rm = f−1(0) ∩ U .
Esempio 35.8. Sia f : R2 → R2, f(x, y) = x2 +y2−1 sia p = (p1, p2) ∈ f−1(0). Si ha chedpf = (2p1, 2p2) : R2 → R2. Dunque dpf(x) = 2 < p, x >. Notiamo che qualsiasi puntoscegliamo nella circonferenza che e controimmagine dello zero, possiamo, in un intornodi quel punto, scriverla come grafico di una funzione di x, oppure di y.
Definizione 35.9. Un sottoinsieme M di Rn si dice sottovarieta di dimensione d se∀p ∈M,∃Ω ⊆ Rn aperto tale che p ∈ Ω e ∃f : Ω→ Rn−d C∞ tale che
1. M ∩ Ω = f−1(0)
2. dpf : Rn → Rn−de suriettivo
Esempio 35.10. SLn(R) ⊆ Mn(R) e una sottovarieta di Mn(R) di dimensione n2 − 1.F : Mn(R) → R, F (X) = det(X) − 1. A ∈ SLn(R), dAF (x) = dAdet(X) = tr(A−1X).Da cui la suriettivita del differenziale.
189

190
Capitolo 36
Trentaseiesima lezione (FilippoCallegaro, 04/05/2010)
36.1 Esponenziale di matrici
In questa lezione lavoreremo in spazi del tipo Mm,n(K), indicando con questo simbolo lematrici a coefficienti in K con m righe ed n colonne.
Definizione 36.1. In particolare, quando K = C, abbiamo:
• un prodotto scalare: 〈A,B〉 := tr(AB∗) =∑
i,j aijbij;
• una norma indotta da questo prodotto scalare: ‖A‖ =√〈A,A〉 (norma di Frobe-
nius), che coincide con l’usuale norma Euclidea di Cn2;
• una distanza indotta da questa norma: d(A,B) = ‖A−B‖;
• una funzione naturale bilineare e continua che alla coppia (A,B) associa AB;
• l’applicazione A 7→ A∗ (trasposto coniugato), che e un’isometria, continua ed anti-Clineare.
Proposizione 36.2. Per ogni coppia A,B di matrici vale ‖AB‖ ≤ ‖A‖ · ‖B‖
Dimostrazione. Indichiamo con Ai le righe di A e con Bj le colonne di B. Si ha allora
‖AB‖2 =∑i,j
〈Ai, Bj〉2 ≤∑i,j
‖Ai‖2‖Bj‖2= ‖A‖2 · ‖B‖2,
dove la disuguaglianza intermedia e garantita dalla disuguaglianza di Cauchy-Schwarz(se 〈·, ·〉 e un qualunque prodotto scalare e ‖ · ‖ la norma indotta, 〈a, b〉 ≤ ‖a‖ · ‖b‖).
exp Definizione 36.3. Data A ∈Mn,n poniamo
expA :=∞∑h=0
Ah
h!.
191

Osserviamo che la serie definita converge assolutamente per ogni A, dunque, poiche lospazio delle matrici descritte e uno spazio di Banach (ossia dotato di norma e completorispetto a tale norma), converge anche puntualmente:
∞∑h=0
‖Ah‖h!≤
∞∑h=0
‖A‖h
h!= e‖A‖ < +∞.
Osserviamo inoltre che si ha convergenza totale sugli insiemi compatti di matrici:infatti, sia fissato r0 e sia A = A ∈Mn,n | ‖A‖ ≤ r0. Allora per ogni A ∈ A vale:
∞∑h=0
∥∥∥∥Ahh!
∥∥∥∥ ≤ ∞∑h=0
rh
h!= er.
36.2 Proprieta dell’esponenziale di matrici
Dimostriamo ora alcuni fatti elementari sull’esponenziale di matrici.
Proposizione 36.4. Se A e B commutano, allora vale:
exp(A+B) = expA · expB.
lem:prop-potenze-exp
Dimostrazione. Grazie alla commutativita di A e B e possibile espandere il termine ge-nerico di exp(A + B) con il binomio di Newton: si ottiene un prodotto di Cauchy che,poiche la convergenza e assoluta, ha come somma il prodotto delle somme dei fattori.
exp(A+B) =∞∑h=0
(A+B)h
h!=∞∑h=0
1
h!
( ∑p+q=h
h!
p!q!ApBq
)=
=
(∞∑p=0
Ap
p!
)(∞∑q=0
Bq
q!
)= expA · expB.
Proposizione 36.5. La funzione esponenziale e continua.
Dimostrazione. Il termine generico della serie e polinomiale in A, dunque e continuo.Inoltre abbiamo visto che la serie esponenziale converge totalmente (dunque anche uni-formemente) sui compatti, quindi la somma e continua su ogni compatto.
Proposizione 36.6. La funzione esponenziale assume valori in GLn(C) e su tale codo-minio e surgettiva.
Dimostrazione. Per il lemmalem:prop-potenze-exp36.4, si ha expA · exp(−A) = exp(0) = Id, dunque expA e
invertibile.Resta da mostrare la surgettivita. A tale scopo cominciamo con il calcolare expA per
una matrice generica.Osserviamo innanzitutto che, se B ∈ Gln(C) e A ∈Mn,n(C), vale
exp(BAB−1) =∞∑h=0
(BAB−1)h
h!=∞∑h=0
B(A)hB−1
h!= B
(∞∑h=0
Ah
h!
)B−1.
192

Sfruttiamo ora questa formula unitamente al teorema sulla forma normale di Jordan.Scriviamo quindi A = B(S + N)B−1 in cui B e la matrice di cambio di base che portaA in forma di Jordan, S e diagonale ed N e nilpotente. Poiche la matrice S e multipladell’identita sui blocchi di Jordan, essa commuta con N .
Calcoliamo allora
expA = B · exp(S +N) ·B−1 = B · exp(S) exp(N) ·B−1.
Osserviamo che essendo S diagonale con entrate s1, . . . , sn, allora expS e a suavolta diagonale, con entrate es1 , . . . , esn (l’esponenziale si comporta sulle varie entratedella matrice come l’ordinario esponenziale complesso). Anche valutare expN e facile, inquanto esiste un intero m tale che Nm = 0, quindi la serie si riduce ad una somma finita.
Questo non solo ci fornisce un algoritmo concreto per il calcolo di expA, ma cipermette anche di dimostrare la surgettivita della mappa esponenziale.
Sia infatti A ∈ GLn(C): vogliamo costruire una matrice T tale che expT = A. Scri-viamo A in forma di Jordan: A = B(S + N)B−1 = BS(Id + S−1N)B−1 (dove l’ultimadisuguaglianza e resa possibile dal fatto che A, dunque anche S, e invertibile). Come pri-ma, S ed N commutano. Ne segue che anche S−1N e nilpotente, perche (con le notazionidi prima) (S−1N)
m= S−mNm = 0.
Siano ora s1, . . . , sn le entrate della matrice S (tutte diverse da 0, come appena visto).Esistono allora (anche se non unici) numeri complessi l1, . . . , ln tali che eli = si. Dettaallora L la matrice diagonale di entrate l1, . . . , ln, per il calcolo svolto prima sappiamoche expL = S.
Vogliamo ora costruire N ′ con la proprieta che expN ′ = Id+S−1N . Consideriamo laserie:
Y (t) =∑h=1
(−1)h+1
hth.
Essa e la serie formale di log(1+t), e si ha quindi (a livello di serie formali) exp(Y (t)) = 1+t; l’uguaglianza vale anche per le somme delle serie quando esse siano valutate all’internodel dominio di convergenza: dato pero che S−1N e nilpotente, la serie Y (S−1N) e in realtauna somma finita (mentre sappiamo che la serie esponenciale converge per ogni matrice).Posto N ′ = Y (S−1N) si deve percio necessariamente avere expN ′ = I + S−1N , comevoluto. Inoltre, se si e avuto cura di scegliere le li in modo che siano costanti sui blocchidi Jordan, risulta anche che L e N ′ commutano.
Mettendo tutto insieme otteniamo la tesi:
exp(B(L+N ′)B−1) = B · expL expN ′ ·B−1 = BS(I + S−1N)B−1 = A.
Corollario 36.7. GLn(C) e connesso per archi
Dimostrazione. Siano infattiA,B ∈ GLn(C) edM,N ∈Mn,n tali che expM = A, expN =B. Dal momento che Mn,n e uno spazio vettoriale esiste un certo arco continuo γ : [0, 1]→Mn,n tale che γ(0) = M,γ(1) = N .
Ma allora, dato che la mappa esponenziale e continua, exp γ : [0, 1]→ GLn(C) e uncammino continuo che unisce A a B.
Osservazione 36.8. exp : Mn,n(R) → GLn(R) non e surgettiva: infatti in tal caso lacomposizione det exp : Mn,n(R)→ R∗ sarebbe continua e surgettiva, ma R∗ e sconnesso,mentre Mn,n(R) non lo e, e questo e chiaramente un assurdo.
193

Proposizione 36.9. Per t ∈ R vale:
dk
dtkexp(tA) = Ak exp(tA)
prop:derivata-exp
Dimostrazione. E evidente che ci e sufficiente dimostrare la tesi per k = 1 (gli ordinisuperiori si ottengono facilmente per induzione). La dimostrazione ricalca molto da vicinola prova dell’enunciato analogo nel caso dell’ordinario esponenziale reale.
Valutiamo inizialmente la derivata nell’origine. Per definizione:
d
dtexp(tA)
∣∣∣t=0
= limδ→0
exp(δA)− Idδ
= limδ→0
(A+
∑∞h=2(δA)h/(h!)
δ
).
Poiche la convergenza della serie a destra e assoluta, posso scambiare i segni di sommae di limite: tutti gli addendi tendono a zero, dunque la derivata risulta essere A.
Sia ora t0 ∈ R: allora vale che
d
dtexp(tA)
∣∣∣t=t0
=d
dtexp(t0A+ tA)
∣∣∣t=0
= exp(t0A)d
dtexp(tA)
∣∣∣t=0
= A exp(t0A).
Proposizione 36.10. Sia A ∈Mn,n(C) tale che per ogni t ∈ R vale exp(tA) ∈ GLn(R).Allora A e una matrice reale.
Dimostrazione. Si ha infatti A = ddt
exp(tA)∣∣t=0∈ GLn(R).
36.3 Esponenziazione di matrici hermitiane
Nel seguito di questa lezione lavoreremo molto con gruppi di matrici hermitiane. Ricor-diamo la definizione ed alcuni risultati.
Definizione 36.11. Denotiamo con pn l’insieme delle matrici quadrate di ordine n her-mitiane e con Pn il sottoinsieme di pn delle matrici defnite positive (ossia, i cui autovalorisono tutti positivi).
spettrale Teorema 36.12. Sia A matrice hermitiana. Allora A si diagonalizza in una matrice realerispetto ad una base di autovettori ortogonale. Inoltre, gli autovalori di A sono tutti reali.
Dimostrazione. Denotiamo con 〈, 〉 il prodotto hermitiano standard di Cn. Si ha allora〈Av, v〉 = 〈v,Aw〉 per definizione di matrice hermitiana.
Sia dunque λ un autovalore di A e v un corrispondente autovettore. Si ha che:
λ‖v‖2 = 〈Av, v〉 = 〈v, Av〉 = 〈v, λv〉 = λ〈v, v〉 = λ‖v‖2,
dunque λ e reale.Inoltre, se w ∈ v⊥, si ha anche:
〈Aw, v〉 = 〈w,Av〉 = 〈w, λv〉 = λ〈w, v〉 = 0,
dunque A(v⊥) ⊆ v⊥ (cioe A conserva l’ortogonale ai suoi autovettori).La tesi segue allora immediatamente: prendiamo un autovettore v1 (che esiste in cam-
po complesso), poi prendiamo la restrizione di A all’ortogonale di v1 e costruiamo perinduzione sulla dimensione una base. E immediato verificare che tale base verifica latesi.
194

Proposizione 36.13. La funzione esponenziale e una bigezione da pn a Pn.
Dimostrazione. Verifichiamo intanto che l’immagine sia contenuta in Pn: possiamo scri-vere A = BDB−1 in cui D e diagonale con entrate tutte reali.
Si ha allora (expA)∗ = expA∗ = expA (la prima uguaglianza si ricava immediata-mente dalla scrittura in serie dell’esponenziale), e quindi expA e hermitiana.
Inoltre, expA = B · expD · B−1 ed expD e diagonale con entrate tutte positive (inquanto esponenziali di numeri reali), percio essa e anche definita positiva.
Mostriamo che l’esponenziale e surgettiva. Fissiamo P ∈ Pn e scriviamo P = BDB−1,con D diagonale con entrate tutte reali positive. Per quanto visto prima, esiste allora unamatrice L diagonale, con entrate i logaritmi (reali) delle entrate di D, tale che D = expL.Si ha allora P = exp(BLB−1).
Verifichiamo infine che la funzione e iniettiva. Siano A,B ∈ pn tali che expA = expB;siano poi e1 e λ1 un autovettore e il corrispondente autovalore per A, e sia f1, . . . , fn unabase di autovettori per B, con autovalori rispettivamente µ1, . . . , µn.
Dato che f1, . . . , fn e una base, possiamo scrivere in modo unico e1 =∑
i aifi.Applichiamo allora expA = expB ai due membri di questa uguaglianza:
eλ1e1 =∑i
aieµifi.
Per l’unicita della scrittura in base abbiamo allora che eλ1 · ai = eµi · ai per ogni i, dacui segue (osservando che se ai 6= 0 allora µi = λ) che e1 e un autovettore anche per B,in quanto somma di autovettori con lo stesso autovalore. Inoltre, dato che esiste almenoun ai 6= 0 si ricava anche eλ1 = eµi , ossia che µi = λ1 (dato che in R l’esponenziale einiettiva).
Abbiamo dunque provato che ogni autovettore di A e anche autovettore di B con lostesso autovalore: questo implica che A = B, perche le due matrici hanno la stessa formadiagonale rispetto ad una stessa base di autovettori.
Esercizio 36.14. Le definizioni date per il campo complesso si possono estendere al casoreale, definendo l’insieme pn(R) delle matrici simmetriche e l’insieme Pn(R) delle matricisimmetriche definite positive.
Si mostri che vale la stessa proposizione appena dimostrata, ossia che exp e una mappacontinua e bigettiva da pn a Pn.
Osservazione 36.15. Vale in realta un risultato piu forte dei teoremi appena visti: anchel’inversa di exp risulta essere continua, dunque exp e in realta un omeomorfismo tra pne Pn.
36.4 Algebre di Lie
AlgebraLie Definizione 36.16. Una algebra di Lie g su un campo K e uno spazio vettoriale dotatodi una forma K-bilineare [·, ·] (chiamata parentesi bracket di Lie) che sia antisimmetricae che rispetti la relazione di Jacobi:
[x, [y, z]] + [y, [z, x]] + [z, [x, y]] = 0, ∀x, y, z ∈ g.
195

Esempio 36.17. Elenchiamo alcuni esemi di algebre di Lie.
• Un qualunque K-spazio vettoriale con le parentesi di Lie [A,B] = 0 costituisceun’algebra di Lie (detta algebra abeliana).
• Una qualunque algebra associativa dotata di un prodotto interno ∗ costituisce un’al-gebra di Lie con il bracket
[A,B] = A ∗B −B ∗ A
(spesso questa parentesi di Lie viene anche chiamata commutatore, ed e nulla se esolo se A e B commutano rispetto a ∗).
In particolare, questa costruzione puo essere fatta sull’algebra delle matrici quadrateMn,n(K) utilizzando l’ordinario prodotto tra matrici.
• (R3,∧), dove ∧ indica il prodotto vettoriale, e un’algebra di Lie.
196

Capitolo 37
Trentasettesima lezione (AngeloVistoli, 05/05/2010)
37.1 Teorema della funzione inversa.
Definizione 37.1. Sia Ω ⊆ Rn un aperto, e sia F : Ω → Rn una funzione. Diremo cheF e un diffeomorfismo se e C∞, invertibile e con inversa C∞.
Teorema 37.2 (Teorema della funzione inversa.). Sia Ω ⊆ Rn un aperto, p ∈ Ω, e siaF : Ω → Rn una funzione di classe C∞ tale che il differenziale dpF : Rn → Rn sia unisomorfismo. Allora esistono un intorno aperto U ⊆ Rn di p e un intorno aperto V ⊆ Rndi F (p) tali che F (U) = V , F|U : U → V sia biunivoca e (F|U)−1 : V → U sia C∞.
Il teorema della funzione inversa, che non dimostriamo, dice quindi che la funzione Fe localmente (cioe in un intorno di p) un diffeomorfismo.
Esempio 37.3. Sia f : R → R la funzione tale che f(x) = x3. Evidentemente, questafunzione non soddisfa le ipotesi del teorema della funzione inversa in p = 0 (perche ilsuo differenziale in tale punto e la funzione nulla). Si puo verificare che la sua funzioneinversa non e derivabile in quel punto.
Esempio 37.4. Sia f : R→ R la funzione tale che f(x) = x5 + x+ 1. Il differenziale diquesta funzione e sempre un isomorfismo (la derivata e 5x4 + 1, sempre maggiore di 0)e questo, per il teorema della funzione inversa, ci assicura che la funzione f−1 : R → Re C∞.
Teorema 37.5 (Teorema della funzione implicita.). Sia Ω ⊆ Rn, f : Ω → Rm unafunzione di classe C∞, con m ≤ n e d = n−m. Sia p ∈ Ω tale che f(p) = 0. Supponiamoche il differenziale dpf : Rn → Rm sia suriettivo. Allora esiste un intorno U ⊆ Ω di ptale che f−1(0) ∩ U e il grafico di una funzione C∞ da un aperto di Rd in Rn.
Ad esempio, supponiamo che il minore costituito dalle ultime m colonne di Jp(f) siainvertibile. Allora esistono un aperto V ⊂ Rd, un aperto U ⊆ Ω contenente p ed unafunzione ϕ : V → Rm tali che (x, ϕ(x)) ∈ V × Rm = f−1(0) ∩ U .
Dimostrazione. Notiamo innanzitutto che esiste una funzione lineare l : Rn → Rd taleche, se la funzione F : Ω→ Rd×Rm e definita da F (t) = (l(t), f(t)), allora il differenziale
197

dpF : Rn → Rn e un isomorfismo. Questo e vero perche dpf : Rn → Rm ha nucleo di
dimensione d per ipotesi, e poiche evidentemente si ha dpF (x) =
(l(x)dpf(x)
)e sufficiente
che l sia iniettiva sul nucleo di dpf ; in particolare, possiamo scegliere che l sia tale che,per ogni (x, y) ∈ Rd × Rm, valga l(x, y) = x.Percio, per il teorema della funzione inversa, esistono un intorno U ⊆ Rn di p e un intornoV ⊆ Rn = Rd×Rm di F (p) = (l(p), f(p)) tali che F|U : U → V sia invertibile con inversadi classe C∞.Sia A = x ∈ U : f(x) = 0; allora e evidente che F (A) = (s, t) ∈ V : t = 0. ScrivendoU = U ′ × U ′′ ⊆ Rd × Rm e V = V ′ × V ′′ ⊆ Rd × Rm, definiamo la funzione ϕ : V ′ → U ′′
in modo che sia, per ogni s ∈ V ′, F−1(s, 0) = (s, ϕ(s)).Allora l’insieme delle coppie (s, ϕ(s)) ∈ V ′ × V ′′ ⊆ Rn e f−1(0) ∩ U , perche F (s, ϕ(s)) =(s, 0) e F : U → V e invertibile.
Esempio 37.6. Consideriamo la funzione
F : R+ × R→ R2 \ 0(ρ, θ) 7→ (ρ cos θ, ρ sin θ)
che in sostanza lega le coordinate polari a quelle cartesiane. Ci poniamo il problema diinvertire F . Purtroppo pero F non e iniettiva (F (ρ, θ) = F (ρ, θ + 2π) per ogni ρ, θ neldominio), quindi non e invertibile. Notiamo d’altra parte che:
1 F |R+×[0,2π) e biunivoca. Chiamo quindi G l’inversa.
2 Per il teorema della funzione inversa F e localmente invertibile in ogni punto deldominio e -cosa importante- l’inversa e continua (proprieta che invece manca alla Gprima definita). Infatti
JF (p) =
(cos θ −ρ sin θsin θ ρ cos θ
)Il suo determinante e sempre diverso da zero; siamo quindi nelle ipotesi del teorema.
Esempio 37.7. Consideriamo la funzione:
f : R3 → R(x1, x2, x3) 7→ (x1
2 + x22 + x3
2)
La vogliamo studiare nel quadro dei teoremi appena fatti. Fissiamo quindi p = (0, 0, 1)nel dominio. Abbiamo che
dpf =(
0 0 2)
Vorremmo “completare” (nel senso di quanto detto prima) f ad una funzione F a valoriin R3 , in modo tale che dpF sia invertibile. Poniamo F (x1, x2, x3) = (x1, x2, x1
2 + x22 +
x32) = (y1, y2, y3):
dpF =
1 0 00 1 00 0 2
198

Per il teorema della funzione inversa F | risulta invertibile in un intorno di p. L’inversaF |−1 vicino a F (p) = (0, 0, 1) vale F |−1(y1, y2, y3) = (x1, x2, x3) = (y1, y2,
√y3 − y1
2 − y22).
Si osservi inoltre che, sempre rimanendo opportunamente vicini a p e F (p), la controim-magine dei punti (y1, y2, 1), ovvero i punti (x1, x2,
√1− x1
2 − x22) del dominio, sono della
forma (x1, x2, ϕ(x1, x2)). ϕ e proprio la funzione implicita (la cui esistenza e garantitadall’omonimo teorema) relativa a f nel punto p.
199

200

Capitolo 38
Trentottesima lezione (FilippoCallegaro, 11/05/2010)
38.1 Sottoalgebre di Lie ed omomorfismi
Diamo alcune definizioni, che riprendono molto da vicino costruzioni analoghe che sipossono fare per altri tipi di strutture algebriche.
Definizione 38.1. Sia g un’algebra di Lie con parentesi [·, ·]. Sia h un sottospazio vetto-riale di g. Allora diciamo che:
• h e una sottoalgebra di g se [x, y] ∈ h per ogni x, y ∈ h.
• h e un ideale di g se [x, y] ∈ h per ogni x ∈ h e y ∈ g. Osserviamo che, poiche leparentesi sono antisimmetriche, questo equivale a chiedere che anche [y, x] ∈ h.
Definizione 38.2. Un omomorfismo di algebre di Lie e una mappa lineare ϕ : g → htale che
ϕ([x, y]g) = [ϕ(x), ϕ(y)]h.
Teorema 38.3. Sia i un ideale di g; sia g/i lo spazio vettoriale quoziente e sia π : g→ g/ila proiezione al quoziente. Allora esiste un’unica parentesi di Lie su g/i tale che π sia unomomorfismo suriettivo di algebre di Lie.
Sia inoltre ϕ : g→ h un omomorfismo di algebre di Lie. Allora kerϕ e un ideale di g.
38.2 Costanti di struttura
Definizione 38.4. Fissata una base e1, . . . , en, su un K-spazio vettoriale V di dimensio-ne n, posso caratterizzare una qualsiasi applicazione bilineare [·, ·] : V ×V → V utilizzandon3 numeri ckij ∈ K, con 1 ≤ i, j, k ≤ n. tali che:
[ei, ej] =n∑k=1
ckijek.
Tali numeri sono detti costanti di struttura.
201

Proposizione 38.5. Un’applicazione [·, ·] definita come sopra e una parentesi di Lie see solo se valgono le seguenti relazioni:
ckij = −ckji, ∀ 1 ≤ i, j, k ≤ n,n∑i=1
(cijkcrih + cirhc
rij + cihjc
rik) = 0, ∀ 1 ≤ j, k, h, r ≤ n.
Tali relazioni codificano rispettivamente la proprieta di antisimmetria e la relazionedi Jacobi del bracket.
38.3 Decomposizione di GLn(C)
Lemma 38.6. Sia P ∈ Pn: allora esiste ed e unica Q ∈ Pn tale che Q2 = P . Chiameremotale matrice la radice quadrata di P , in analogia con quanto accade con i reali positivi.
Dimostrazione. Sappiamo che esiste (ed e unica) una matrice p ∈ pn tale che exp p = P .Allora, ponendo q = p/2 e Q = exp q, e immediato constatare che Q soddisfa la tesi dellemma.
Q e anche unica: sia Q′ ∈ Pn tale che (Q′)2 = P , q′ ∈ pn tale che exp q′ = Q′ e p′ = 2q′.Allora risulta che:
P = Q′ ·Q′ = exp q′ · exp q′ = exp(q′ + q′) = exp p′.
Poiche abbiamo visto che la funzione esponenziale e una bigezione da pn su Pn,concludiamo che p = p′, da cui q = q′ e Q = Q′.
Proposizione 38.7. Per ogni A ∈ GLn(C) esiste un’unica U ∈ U(n) ed un’unica P ∈ Pntali che A = UP .
Dimostrazione. Consideriamo A∗A: essa e hermitiana, in quanto (A∗A)∗ = A∗A. Inoltree anche definita positiva, perche, preso X ∈ C∗, vale che:
X∗(A∗A)X = (AX)∗(AX) = ‖AX‖2 > 0.
Essa appartiene dunque a Pn. Sia allora P la radice quadrata di A∗A e U = P−1A.Per costruzione, P e hermitiana definita positiva. Dobbiamo mostrare che U e unitaria.Osserviamo che, per l’unicita della matrice inversa, anche P−1 e una matrice hermitiana.Vale la relazione:
UU∗ = AP−1(AP−1)∗
= A(P 2)−1A∗.
Osservando che:
P 2 = P · P = exp(p/2) · exp(p/2) = exp p = A∗A
si ottiene che UU∗ = AA−1(A∗)−1A∗ = Id, ossia che U e unitaria.Per concludere ci rimane da dimostrare l’unicita della decomposizione; osserviamo
che ci e sufficiente mostrare l’unicita della scelta di P in Pn, dato che l’unicita di U ci egarantita dall’unicita dell’inversa matriciale.
Se A = UP e una scomposizione che soddisfa le ipotesi del teorema, allora risulta che
P 2 = P ∗ · P = (U−1A)∗U−1A = A∗(UU∗)−1A = A∗A.
Ma la radice quadrata e unica, dunque il teorema e provato.
202

La decomposizione appena dimostrata e particolarmente interessante anche percheU(n) e un insieme compatto e pn e uno spazio vettoriale. Vale anche un risultato piuforte, dato senza dimostrazione:
Proposizione 38.8. La mappa
U(n)× pn −→ GLn(C)
(u, p) 7−→ u exp p
e un omeomorfismo (ossia e invertibile, continua e con inversa continua).
38.4 Proprieta della mappa esponenziale
Proposizione 38.9. La mappa esponenziale definita da Mn,n(C) in GLn(C) e una ap-plicazione di classe C∞.
Dimostrazione. Abbiamo dimostrato che la derivata esiste ed e la funzione esponenzialestessa.
Osservazione 38.10. Utilizzando la topologia indotta dalla norma che abbiamo definitoe possibile utilizzare le notazione di Landau (o piccolo e O grande) con funzioni matriciali.
Ad esempio, vale che: Dimostrazione
exp(tA) = I + tA+t2
2A2 + o(t2), (t→ 0). (38.1) exp:taylor-exp-matrici
rmk:exp-omeomorfismo-locale-in-0 Osservazione 38.11. La mappa esponenziale si puo vedere come una funzione (ovvia-mente non lineare) da Cn2
in Cn2, e quindi anche il differenziale in A di exp e una
mappa (questa volta lineare) da Cn2in Cn2
. In particolare, come abbiamo gia visto, ildifferenziale nell’identita e proprio la matrice identica (si tratta di un caso particolaredella proposizione
prop:derivata-exp36.9, con A = Id e k = 1, valutata in t = 0.
prop:exp-exp-omeomorfismo-locale-in-0 Proposizione 38.12. Sia Mn,n(C) = W1 ⊕W2 una decomposizione qualsiasi in sotto-spazi vettoriali, e sia X = X1 + X2, con X1 ∈ W1, X2 ∈ W2. Considero la seguentemappa:
ϕ : Mn,n(C) −→ GLn(C)
X 7−→ expX1 · expX2
Allora ϕ e un omeomorfismo tra un intorno di 0 in Mn,n(C) e un intorno di Id inGLn(C).
Dimostrazione. Osserviamo innanzitutto che se [X1, X2] = 0 per ogni scelta di X1 e X2,abbiamo che ϕ ≡ exp, dunque il teorema si riduce all’osservazione
rmk:exp-omeomorfismo-locale-in-038.11.
Negli altri casi, consideriamo le relazioni:
exp(tX1) = I + tX1 + o(t) (t→ 0),
exp(tX2) = I + tX2 + o(t) (t→ 0).
Da queste otteniamo:
ϕ(X) = expX1 · expX2 = I + t(X1 +X2) + o(t) = I + t(X) + o(t).
Per il teorema della funzione inversa, otteniamo la tesi.
203

Proposizione 38.13. Siano X, Y ∈Mn,n(C) e t ∈ Rn. Allora vale l’uguaglianza:
ϕ(t) := exp(tX) exp(tY ) = exp
(t(X + Y ) +
t2
2[X, Y ] + o(t2)
)(t→ 0).
Dimostrazione. Osserviamo di nuovo che se X e Y commutano allora la formula e cor-retta, in quanto [X, Y ] = 0 e 0 e o(t2).
In generale, sappiamo che ϕ, con il dominio ristretto alla sua immagine, e localmenteun omeomorfismo (ϕ(t) e una curva localmente iniettiva in GLn(C), per la proposizioneprop:exp-exp-omeomorfismo-locale-in-038.12). Poiche l’esponenziale e localmente un diffeomorfismo di classe C∞, esiste un’unicafunzione A(t) (di classe C∞) da un intorno di 0 ∈ R su un intorno di 0 ∈Mn,n(C), taleche, per t sufficientemente piccolo:La dimostrazione di C∞ e
stata fatta?
expA(t) = exp(tX) exp(tY )
Poiche A(t) e C∞, essa ammette uno sviluppo in serie di Taylor trocato al terzo ordine:Sicuri che sia cosı semplice?
A(t) = A(0) + tA′(0) +t2
2A′′(0) + o(t2) (t→ 0).
Ovviamente A(0) = 0, in quanto exp(A(0)) = exp(0X) exp(0Y ) = Id; per co-modita poniamo a = A′(0), b = A′′(0) e confrontiamo gli sviluppi di exp(A(t)) e diexp(tX) exp(tY ) (utilizzando l’espansione (
exp:taylor-exp-matrici38.1):Spaziare di piu i due pezzi
exp(tX) exp(tY ) =
(I + tX +
t2
2X2 + o(t2)
)(I + tY +
t2
2Y 2 + o(t2)
)=
= I + t(X + Y ) +t2
2(X2 + 2XY + Y 2) + o(t2),
exp(A(t)) = exp
(t(a+
t
2b+ o(t))
)= I +
(ta+
t2
2b+ o(t2)
)+
(t2
2a2 + o(t2)
)+ o(t2)
= I + ta+t2
2(a2 + b) + o(t2)
Dall’unicita del polinomio di Taylor ottengo le condizioni:a = X + Y
a2 + b = (X2 + 2XY + Y 2),
da cui a = (X + Y ) e b = XY − Y X = [X, Y ].
38.5 Come costruire delle algebre di Lie
th:exp-coord-sys Teorema 38.14. Sia G un sottogruppo topologicamente chiuso di Mn,n(C) e sia
g = X ∈Mn,n(C) | exp(tX) ∈ G ∀t ∈ R.
Allora:
204

• g e un’algebra di Lie reale con il bracket [X, Y ] = XY − Y X;
• La mappa
ϕ : g −→ G
X 7−→ expX
e un omeomorfismo tra un intorno di 0 ∈ g ed un intorno di Id ∈ G.
Dimostrazione. Cominciamo verificando che g e un sottospazio vettoriale. Le prime dueproprieta discendono in effetti direttamente dalla definizione:
• 0 ∈ g, perche exp 0 = Id ∈ G;
• Se X ∈ g, allora, per ogni t reale, tX ∈ G. Ma allora, preso s reale, e immediatoconstatare che anche tsX ∈ G per ogni t reale.
La proprieta di additivita e meno banale. Per ipotesi, se X, Y ∈ g, allora, presi t ∈ Re m ∈ N, vale la seguente relazione:
G 3(
exp
(tX
m
)exp
(tY
m
))m=
=
(exp
(t
m(X + Y )
)+O
(t2
m2
))m=
(t2
m2→ 0
)=
(exp
(t
m(X + Y ) +O
(t2
m2
)))m=
(t2
m2→ 0
)= exp
(t(X + Y ) +O
(t2
m
)) (t2
m→ 0
)= exp(t(X + Y )) +O
(t2
m
) (t2
m→ 0
),
dove tra la seconda e la terza linea si e potuto portare l’O grande all’interno del-l’esponenziale perche i primi due termini del polinomio di Taylor delle due formulecoincidono. E l’ultima da dove viene?
Notiamo che nell’ultimo membro dell’uguaglianza la m compare solo all’interno dell’Ogrande; quindi, fissato t, possiamo far tendere m a piu infinito. Ne segue:∥∥∥∥(exp
(tX
m
)exp
(tY
m
))m− exp(t(X + Y ))
∥∥∥∥ =
∥∥∥∥O( 1
m
)∥∥∥∥→ 0.
Quindi esiste una successione di matrici in G la cui distanza da exp(t(X+Y )) diventaarbitrariamente piccola; allora, poiche G e chiuso, anche tale matrice deve stare in G:questo prova che X + Y ∈ g. La parte finale di questa
dimostrazione mi e decisa-mente oscura, ma ci sta chestasera io sia cotto.
Le proprieta di antisimmetria e di Jacobi del bracket sono verificate in Mn,n, dunquea maggior ragione anche in g. Rimane da provare che, presi X e Y in g, allora si ha che
205

[X, Y ] ∈ g. Procediamo in maniera simile a prima, considerando t ∈ R e m ∈ N:
G 3 exp
(tX
m
)exp
(tY
m
)exp
(−t(X + Y )
m
)=
= exp
(t
m(X + Y ) +
t2
2m2[X, Y ] +O
(t3
m3
))exp
(−t(X + Y )
m
)=
(t3
m3→ 0
)= exp
(t2
2m2[X, Y ] +O
(t3
m3
)) (t3
m3→ 0
).
Ora eleviamo a m2:
G 3(
exp
(t2
2m2[X, Y ] +O
(t3
m3
)))m2
= exp
(t2
2[X, Y ]
)+O
(t3
m
).
Come prima, facendo tendere m all’inifinito trovo una successione di matrici in G
che tende a exp(t2
2[X, Y ]
)e concludo che essa sta in G per ogni t ∈ R+ (poiche t2 puo
assumere ogni valore reale positivo). Lo stesso risultato, pero, vale anche per i numeripositivi, utilizzando [Y,X] = −[X, Y ].
Ora ci rimane da dimostrare che la mappa esponenziale e un omeomorfismo locale traun intorno di 0 ∈ g e un intorno di Id ∈ G. L’esponenziale e un un omoemorfismo localetra un intorno A di 0 ∈Mn,n(C) e un intorno B di Id ∈ Gln(C); per cui se restringiamoil dominio a A∩g diventa una funzione iniettiva con immagine in G (anche se in generalenon suriettiva), e di conseguenza un omeomorfismo tra A ∩ g e la sua immagine in G.Quindi ci rimane soltanto da dimostrare che G′ ≡ exp(A ∩ g) e un intorno di Id ∈ G.
Per assurdo, supponiamo esista una successione gn con gn ∈ G \G′ per ogni n, taleche gn → Id per n→∞.
Consideriamo ora la seguente decomposizione: Mn,n(C) = g⊕ V , in cui V e un com-plementare qualunque. Prendiamo ora un intorno U × U ′ di 0 con U ∈ g, U ′ ∈ V e laseguente mappa suriettiva in un intorno di Id:
U × U ′ −→ GLn(C)
(X, Y ) 7−→ expX · expY .
Posso quindi costruire la successione gn ponendo gn = exp(Xn)exp(Yn) ∈ G \ G′,con (Xn, Yn) → 0 per n → ∞. Considero quindi la successione di interi mn tale che∀n mn ≤ ||Yn||−1 < mn + 1 (posso supporre senza perdita di generalita che ||Yn|| < 1) ecostruisco la successione mnYn: questa e una successione limitata in V , spazio complesso adimensione finita, per cui ammette una sottosuccessione convergente: ∃mnkYnk → Y 6= 0.Per brevit consideriamo questa sottosuccessione come la nuova successione mnYn.
Ora mostriamo che exp(pqY ) ∈ G ∀p, q ∈ Z, q > 0. Ricorrendo alla divisione intera, e
sempre possibile scrivere pmn = snq + rn, sn, rn ∈ N, 0 ≤ rn < q.
exp(p
qY ) = lim
n→+∞exp(
pmn
qYn) =
= limn→+∞
exp(snYn) = limn→+∞
(exp(Yn))sn
206

Poiche (exp(Yn))sn ∈ G per ogni sn ∈ N e poiche al solito G e chiuso, allora anche illimite sta in G, ovvero exp(p
qY ) ∀p
q∈ Q. Poiche Q e denso in R e una funzione continua e
fissata dai valori che assume su un denso, risulta anche che exp(tY ) ∀t ∈ R. Concludiamoquindi che Y 6= 0 ∈ g; ma cio e assurdo, in quanto e limite di una successione in V , chee uno spazio chiuso che ha solo 0 come intersezione con g.
207

208
Capitolo 39
Trentanovesima lezione (AngeloVistoli, 12/05/2010)
39.1 Varieta e sistemi di coordinate intorno ad un
punto
Definizione 39.1. Dato 0 ≤ d ≤ n, si dice sottovarieta (C∞) di Rn di dimensione dun sottoinsieme M ⊆ Rn tale che per ogni p ∈ M esista un intorno Ω di p in Rn e unafunzione C∞ f : Ω→ Rn−d tale che:
• f−1(0) = M ∩ U
• dpf : Rn → Rn−d e suriettivo
Abbiamo visto che M e il grafico di una funzione C∞ da un aperto di Rn a Rn−d;a meno di un cambiamento di coordinate, possiamo scegliere come funzione g : Rd ×Rn−d → Rn−d tale che g(x, y) = y ∀(x, y) ∈ Rd × Rn−d. Piprecisamente osserviamoche, restringendo opportunamente l’aperto Ω della definizione, esiste un diffeomorfismoF da U × V in Ω, con U aperto di Rd, V aperto di Rn−d, tale che la composizioneg = f F : Rd × Rn−d → Rn−d soddisfi g(x, y) = y ∀(x, y) ∈ Rd × Rn−d. Siamo percioportati a dare la seguente definizione:
Definizione 39.2. Se M ⊆ Rn una sottovarieta di dimensione d, si dice sistema dicoordinate intorno ad un punto p ∈M una funzione C∞ u : U →M , dove U e un apertodi Rd, tale che esista una controimmagine ξ di p e che dξu : Rd → Rn sia iniettivo.
Osservazione 39.3. • Ogni sottovarieta di Rn ha un sistema di coordinate in ognipunto.
• Se u : U → M e un sistema di coordinate e ξ e una controimmagine di p, alloraesiste un intorno U ′ di ξ in U tale che u|′U sia iniettiva e u|U ′ sia intersezione diun aperto di Rn con M .
• Dati due sistemi di coordinate u : U →M , v : V →M , con ξ = u−1(p), η = u−1(p),esistono due intorni U ′ di ξ in U e V ′ di η in V , dotati di un diffeomorfismoΦ : U ′ → V ′ tale che u|U ′ = v Φ.
209

Definizione 39.4. Sia M ⊆ Rn una sottovarieta C∞ di dimensione d, sia p ∈M . Si dicespazio tangente ad M in p l’insieme TpM = ker(dpf), dove f : Ω → Rn−d e la funzionedefinita negli enunciati precedenti e dpf : Rn → Rn−d e il suo differenziale nel punto p.Ovviamente, essendo dpf lineare, TpM e un sottospazio vettoriale di Rn di dimensione d.
Osserviamo che la funzione f che caratterizza la varieta non e definita in modo univo-co, per cui, affinche lo spazio tangente sia ben definito, e necessario verificare che sceltediverse per la funzione f danno luogo allo stesso spazio. A tal fine, scegliamo un sistemadi coordinate intorno al punto p ∈M :
u : U →M ⊆ Rn
Indichiamo con ξ la controimmagine di p rispetto alla funzione u. Ora, data unafunzione f : Ω → Rn−d, e ben definita la composizione f u : u−1(Ω) → Rn−d; u−1(Ω)sara naturalmente un intorno aperto di ξ in U . Poiche f e la funzione che caratterizzala varieta M , avremo f(u(x)) = 0 ∀x ∈ u−1(Ω); ne segue 0 = dξ(f u) = dpf dξu. Inparticolare, questo significa che l’immagine di dξu e contenuta nel nucleo di dpf . EssendoM una varieta di dimensione d, la dimensione di Imdξu e quella di kerdpf sono entrambeuguali a d, per cui l’inclusione fra i due spazi deve essere un’uguaglianza. In particolare,ne segue che Tpf = kerdpf = Imdξu; poiche il sistema di coordinate u e chiaramenteindipendente dalla funzione f scelta per definire la varieta, concludiamo che lo spaziotangente Tpf e ben definito.
Esempio 39.5. Sia M = S1 ⊆ R2; scegliamo p = (x0, y0) ∈ S1 e f : R2 → R, f(x, y) =f(x2+y2−1). Allora TpS
1 = ker(dpf) = (x, y) ∈ R2|xx0 + yy0 = 0. Sia ora p = (x0, y0) =(cosθ0, senθ0), e scegliamo come sistema di coordinate intorno a p la funzione u : R →S1 ⊂ R2 che associa a θ ∈ R il punto (cosθ, senθ). Si ricava facilmente che dθ0u =
(
(−senθ0
cosθ0
)=
(−y0
x0
), da cui TpS
1 = Imdθ0u =<
(−y0
x0
)>; osserviamo che,
come abbiamo dimostrato, le due caratterizzazioni di TpS1 danno luogo allo stesso spazio.
Osservazione 39.6. Le varieta di dimensione zero in Rn sono i sottoinsiemi discreti diRn. Le varieta di dimensione n in Rn sono invece gli aperti di Rn.
Diamo ora alcuni esempi di sottoinsiemi di Rn che non sono varieta.
Esempio 39.7. • Dn = x ∈ Rn||x| ≤ 1 non e una varieta.
• (x, y) ∈ R2|xy = 0 non e una varieta. Supponiamo infatti che si tratti di unavarieta; chiaramente la sua dimensione dovrebbe essere 1. Sia f una funzione C∞
che caratterizzi la varieta intorno al punto (0, 0); e facile osservare che in tal casoavremmo δf
δx(0) = δf
δy(0) = 0), assurdo in quanto chiediamo per definizione che il
differenziale di f sia suriettivo R.
• (x, y) ∈ R2|x2 = y3 non e una varieta, in quanto la funzione y = x2/3 non e C1.
Definizione 39.8. Si dice gruppo di Lie un sottogruppo di GL(n,R) che sia anche unasottovarieta.
210

Capitolo 40
Quarantesima lezione (FilippoCallegaro, 18/05/2010)
40.1 Omeomorfismo tra pn e Pn
Abbiamo gia mostrato che exp: pn → Pn e biiettiva e continua, mostriamo quindi chel’inversa e continua ed avremo concluso che si tratta di un omeomorfismo.
Definiamo
pn(a, b) =P ∈ pn | a · |v|2 ≤ 〈Pv, v〉 ≤ b · |v|2 ∀v ∈ Cn
,
Pn(a, b) =X ∈ Pn | ea · |v|2 ≤ 〈Xv, v〉 ≤ eb · |v|2 ∀v ∈ Cn
.
Esercizio 40.1. Verificare che questi due insiemi sono chiusi e limitati in Mn(C) equindi sono anche compatti.
Proposizione 40.2. exp: pn(a, b)→ Pn(a, b) e un omeomorfismo
Dimostrazione. Sappiamo gia che exp e iniettiva pertanto anche la sua restrizione lo e; larestrizione e anche suriettiva, perche per la suriettivita di exp esiste Y tale che expY = Xper ogni X ∈ Pn(a, b). E banale osservare che tale Y deve appartenere a pn(a, b).
La continuita segue anch’essa dalla continuita di exp su tutto pn. Infine la funzione inesame ha per dominio un insieme compatto e per immagine uno spazio di Hausdorff (talecioe, che dati due punti dello spazio esistono due intorni disgiunti che li contengono):per un noto teorema di topologia generale exp e quindi una funzione chiusa, dunque eomeomorfa.
A questo punto osserviamo che la continuita di exp−1 : Pn → pn e una proprietalocale; poiche tutte le restrizioni di exp−1 ai Pn(a, b) sono continue (e l’unione di taliinsiemi e tutto Pn) si ha che exp ha inversa continua, quindi e un omeomorfismo.
40.2 Alcune algebre di Lie
Ci occuperemo ora di caratterizzare alcune algebre di Lie che si ottengono dai gruppi dimatrici fin’ora visti con il metodo discusso l’ultima lezione.
Abbiamo gia visto che l’algebra di Lie di GL(n,C) e gl(n,C) = Mn(C), vediamo Lo abbiamo gia visto?
adesso altri esempi.
211

Proposizione 40.3. U(n) < GL(n,C) e chiuso e compatto; la sua algebra di Lie e
u(n) = X ∈ gl(n,C) | X +X∗ = 0 .
Inoltre exp : u(n)→ U(n) e suriettivo.
Dimostrazione. Se X∗ = −X allora X commuta con X∗, dunque:
In = etX · e−tX = etX · etX∗ = exp(tX) · exp(tX)∗,
quindi etX ∈ U(n) e pertanto u(n) e contenuto nell’algebra di Lie associata a U(n).Al contrario, se etX ∈ U(n) per ogni t, allora
0 =d
dtIn
∣∣∣∣t=0
=d
dt
(etX · etX∗
)∣∣∣∣t=0
=
=[X · etX · etX∗ + etX ·X∗ · etX∗
]t=0
= X +X∗,
che prova l’altra inclusione.Infine, sia Y ∈ U(n); allora esiste A ∈ U(n) tale che Y = ABA∗, dove B e diagonale
con autovalori di modulo 1, cioe della forma eiθ1 ,. . . ,eiθn . Pertanto Y = exp(ADA∗), doveD e la matrice diagonale che ha per autovalori iθ1,. . . ,iθn. Banalmente ADA∗ ∈ u(n),dunque anche la suriettivita e dimostrata.
Lemma 40.4. Sia A una matrice quadrata complessa. Allora:
det eA = etrA.
Dimostrazione. Se T e una matrice triangolare che ha sulla diagonale gli elementi t1,. . . ,tn,allora e facile osservare che, preso k ∈ N, T k e una matrice triangolare che ha sulla dia-gonale gli elementi tk1, . . . , tkn. Dunque, considerando lo sviluppo in serie di potenze dieT , e facile dedurre che essa e una matrice triangolare che ha sulla diagonale gli elementiet1 ,. . . ,etn . Pertanto
det eT = et1 · · · etn = etrT .
Ma ogni matrice A ∈ Mn(C) e triangolabile, pertanto esistono B invertibile e Ttriangolare tale che A = BTB−1. Quindi
det eA = det eT = etrT = etrA.
Proposizione 40.5. SU(n) / U(n) (cioe e un sottogruppo normale) ed e chiuso. Inoltrel’algebra di Lie di SU(n) e
su(n) = X ∈ u(n)| tr(X) = 0 .
Infine exp : su(n)→ SU(n) e suriettivo.
Dimostrazione. Sfruttiamo il lemma appena dimostrato. Se etX ∈ SU(n) allora
d
dt
(det(etX)
)≡ 0 ⇒ d
dtetr(tX)
∣∣∣∣t=0
= tr(X) = 0.
212

Se invece X ∈ u(n) e tr(X) = 0 allora etX ∈ U(n) e det(etX) = et·tr(X) = 1 per ogni t.Infine se Y ∈ SU(n) allora esiste A ∈ U(n) tale che Y = ATA∗ dove T e triangolare
superiore e sta in SU(n), pertanto gli elementi sulla diagonale stanno sul cerchio unitarioed hanno prodotto pari ad 1, quindi sono nella forma eiλ1 , . . . , eiλn con
∑nj=1 iλj = 0.
Pertanto Y = eADA∗
dove D e una matrice unitaria e triangolare tale che sulla diagonaleci sono gli elementi iλ1, . . . , iλn. Pertanto
tr(D) =n∑j=1
iλj = 0
quindi D ∈ su(n) e vale la suriettivita.
Il resto della lezione per ora non riesco a capirlo, lo sto studiando, scusatemi cercherodi capirlo e texxarlo quanto prima
213

214
Capitolo 41
Quarantunesima lezione (AngeloVistoli, 19/05/2010)
41.1 Qualche proprieta dei gruppi di Lie
th:Lie-sse-chiuso Teorema 41.1. (caratterizzazione dei gruppi di Lie) Un sottogruppo G di GLn e ungruppo di Lie se e soltanto se e chiuso nella topologia di GLn.
Esempio 41.2. GLn(Q) ⊆ GLn(R) non e un gruppo di Lie, mentre lo e, ad esempio,SLn(R) ⊆ GLn(R).
prop:Lie-Id Proposizione 41.3. Sia G ⊆ GLn un sottogruppo. Supponiamo esista un intorno Udell’identita in GLn ed una funzione F : U → Rm, di classe C∞, che rispetti:
• dIF : Mn → Rm sia surgettivo;
• F−1(0) = G ∩ U .
Allora G e un gruppo di Lie.
Dimostrazione. Sia LA−1 la moltiplicazione a sinistra per A−1. LA−1 porta G in se, e undiffeomorfismo (sostanzialmente, e un polinomio nelle entrate) e permette di considerare∀A la funzione F LA−1 in un intorno di A.
Questa ha come differenziale dA (F LA−1) = dIF dALA−1 = dIF LA−1 (l’ultimauguaglianza e garantita dal fatto che LA−1 e lineare, dunque coincide - in ogni punto -con il suo differenziale), che risulta ovviamente ancora surgettivo, dato che LA−1 e unisomorfismo.
La funzione F LA−1 e allora quella che definisce la varieta in un intorno di A.
Osservazione 41.4. Lo spazio tangente ad un gruppo di Lie G nell’identita ha unastruttura di Algebra di Lie; di piu, detto g = ker dIF lo spazio tangente nell’identita, valeil seguente
Teorema 41.5. X ∈ g ⇐⇒ etX ∈ G ∀t ∈ R
215

Dimostrazione. (⇐) Si ha X = ddt
(etX)∣∣t=0
; possiamo considerare, almeno in un intornodi t = 0, la relazione
0 =d
dt(0) =
d
dt(F (etX)) = dIF
(d
dt(etX)
∣∣∣∣t=0
)= dIF (X)
che ci dice proprio X ∈ ker dIF = g.
(⇔, corollario di quanto visto ad esercitazione)In questo paragrafo indichiamo con g l’insieme X| exp(tX) ∈ G ∀t ∈ RCome dimostrato (
th:exp-coord-sys38.14), exp costituisce un sistema locale di coordinate per l’identita
Id ∈ G.Inoltre, per quanto visto, se u : Rk → G e un sistema di coordinate che manda 0 7→ ξ,
allora Im d0u e lo spazio tangente a G in ξ.In particolare, d0 exp = id : Mn(R) →Mn(R), dunque lo spazio tangente ad Id ∈ G
risulta Im d0 exp = id(g) = g.Si ha percio l’uguaglianza tra lo spazio tangente nell’identita di G e l’algebra di Lie
X| exp(tX) ∈ G ∀t ∈ R.
41.2 Alcuni importanti gruppi di Lie
41.2.1 SLn(R)
SLn(R) ⊆ GLn(R) e definito globalmente dalla funzione F (A) = det(A)−1; il differenzialenell’identita risulta
dIF = dI det = tr : Mn(R)→ R
che e chiaramente surgettivo (essendo una funzione lineare nel campo, essa e o nullao surgettiva).
Lo spazio tangente nell’identita e lo s.v. delle matrici a traccia nulla, che e chiuso percommutatore (dato che tr[A,B] = tr(AB−BA) = tr(AB)−tr(BA) = tr(AB)−tr(AB) =0).
41.2.2 On(R)
Consideriamo On ⊆ GLn(R). Esso e definito (globalmente) dalla funzione
F : Mn(R) −→ Mn(R)
X 7−→ XX t − Id
Sia Msn lo spazio delle matrici simmetriche (esso e uno spazio vettoriale reale di
dimensione n(n+1)2
): dato che XX t−Id e sempre simmetrica, posso considerare la funzioneF a codominio in Ms
n, invece che Mn(R).Per quel che riguarda il differenziale nell’identita, esso risulta
216

d
du
((1 + uX)(1 + uX)t − Id
)∣∣∣∣u=0
=d
du
(u(X +X t) + u2XX t
)∣∣∣∣u=0
= X +X t
che e surgettivo su Msn: infatti, presa Y ∈Ms
n, si ha Y = (Y/2) + (Y/2)t ∈ Im dIF .
Ne segue allora che On e un gruppo di Lie di dimensione n2 − n(n+1)2
= n(n−1)2
, la cuialgebra di Lie e son = X|X = −X t.
41.2.3 Un
Consideriamo ora Un ⊆ GLn(C). Esso e definito (globalmente) dalla funzione
F : Mn(C) −→ Mn(C)
X 7−→ XX∗ − Id
Sia Hn = X ∈Mn(C)|X = X∗ lo spazio delle matrici hermitiane (esso e uno spaziovettoriale su R - e non su C! - di dimensione n2), e AHn quello delle matrici antihermitiane.
Per quel che riguarda il differenziale nell’identita, esso risulta
d
du((1 + uX)(1 + uX)∗ − Id)|u=0 =
d
du
(u(X +X∗) + u2XX∗
)∣∣u=0
= X +X∗
che, come prima, e surgettivo su Hn. Risulta allora che Un e un gruppo di Lie, la cuialgebra di Lie e un = AHn.
41.2.4 SUn
Passiamo ora a considerare un esempio un po’ piu complesso, SUn ⊆ GLn(C).Dato che
SUn(C) = Un(C) ∩ SLn(C)
ed i due gruppi Un(C), SLn(C) sono gruppi di Lie, essi sono chiusi, e quindi lo e anchela loro intersezione: per il teorema
th:Lie-sse-chiuso41.1 abbiamo allora che anche SUn(C) e un gruppo di
Lie.Come insieme esso e sicuramente controimmagine di 0 tramite la funzione
F : Mn(C) −→ Mn(C)× CX 7−→ (XX∗ − Id, detX − 1)
Tuttavia incontriamo una difficolta: il differenziale di F in Id risulta dIF (X) = (X +X∗, trX), che non e surgettivo, in quanto tr(X +X∗) = 2<(trX).
Per superare questo inconveniente, possiamo provare a modificare leggermente la no-stra funzione ed a restringerci ad un intorno dell’identita che non sia l’intero GLn(C): adesempio, la funzione
217

G : Mn(C) −→ Mn(C)× RX 7−→ (XX∗ − Id,=(detX)− 0)
definisce la varieta nell’intorno dell’identita V = X ∈Mn(C)|<(det(X)) > 0.Infatti l’equazione XX∗ = Id ci assicura che det(X) = eiθ; questo, unito al fatto che
=(det(X)) = 0, ci da det(X) = ±1, che tuttavia, nell’intorno V , ha l’unica soluzionedet(X) = 1.
Inoltre, il differenziale dIG = (X + X∗,=(tr(X))) risulta surgettivo: infatti, fissatauna coppia (X, b) con X hermitiana e b numero reale, si ha che
(X, b) =
(X + 2ib/n · Id
2+
(X + 2ib/n · Id
2
)∗,=(tr
(X + 2ib/n · Id
2
))
)Per quanto dimostrato prima (
prop:Lie-Id41.3), questo e sufficiente a trovare una funzione per
definire la varieta in un intorno di ogni punto, ed e anche sufficiente a trovare lo spaziotangente nell’identita (ovvero le matrici antihermitiane a traccia nulla) e la dimensionedel gruppo di Lie come varieta (ovvero n2 − 1).
Osservazione 41.6. Osserviamo che, se ci interessa solo trovare l’algebra di Lie di SUn,possiamo anche procedere come segue:
X ∈ sun ⇔ etX ∈ SU(n) ∀t ∈ R⇔ etX ∈ U(n) ∩ SL(n) ∀t ∈ R⇔ X ∈ u(n) ∩ sl(n)
che ci permette appunto di concludere subito che l’algebra di Lie sun e lo s.v. dellematrici antihermitiane a traccia nulla.
218

Indice
Introduzione 3
Programma del corso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1 Prima lezione (Angelo Vistoli, 06/10/2009) 5
1.1 Gruppi: definizione, proprieta fondamentali ed esempi . . . . . . . . . . . 5
2 Seconda lezione (Filippo Callegaro, 07/10/2009) 9
2.1 I numeri complessi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 Coordinate polari . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.2 I complessi come sottoanello di matrici . . . . . . . . . . . . . . . 9
2.2 I quaternioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1 Quaternioni come sottoanello di matrici . . . . . . . . . . . . . . 11
2.3 Isometrie di Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1 Matrici invertibili e ortogonali . . . . . . . . . . . . . . . . . . . . 12
2.4 Alcuni esempi di O(n,R) . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4.1 Considerazioni algebriche . . . . . . . . . . . . . . . . . . . . . . . 14
3 Terza lezione (Filippo Callegaro, 13/10/2009) 17
3.1 Riassuntino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Sottogruppi normali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.1 Prodotto semidiretto . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 Quarta lezione (Angelo Vistoli, 14/10/2009) 23
4.1 Proprieta delle permutazioni . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Forme multilineari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3 Potenze esterne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5 Quinta lezione (Filippo Callegaro, 20/10/2009) 29
5.1 Struttura di O(3) e SO(3) . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.1.1 Una prima relazione tra quaternioni e rotazioni . . . . . . . . . . 30
5.1.2 Un omomorfismo da S3 in O(3) . . . . . . . . . . . . . . . . . . . 30
5.1.3 Immagine di ρ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.1.4 Proprieta dell’omomorfismo ρ . . . . . . . . . . . . . . . . . . . . 32
5.1.5 Conclusione: caratterizzazione di SO(3) . . . . . . . . . . . . . . . 35
219

6 Sesta lezione (Angelo Vistoli, 21/10/2009) 376.1 Basi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376.2 Quozienti di gruppi abeliani e quozienti di spazi vettoriali . . . . . . . . . 396.3 Esistenza della potenza esterna . . . . . . . . . . . . . . . . . . . . . . . 39
7 Settima lezione (Filippo Callegaro, 27/10/2009) 417.1 Altro modo di vedere SO3 . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.1.1 Calcolo dell’omeomorfismo . . . . . . . . . . . . . . . . . . . . . . 417.1.2 Gruppi topologici . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.2 Prodotti hermitiani . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427.2.1 Matrici unitarie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427.2.2 Matrici unitarie speciali . . . . . . . . . . . . . . . . . . . . . . . 447.2.3 Nuovamente i quaternioni . . . . . . . . . . . . . . . . . . . . . . 44
8 Ottava lezione (Angelo Vistoli, 28/10/2009) 458.1 Base di una potenza esterna . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.1.1 Ricerca dell’applicazione multilineare . . . . . . . . . . . . . . . . 468.1.2 Costruzione di hi1,...,ik . . . . . . . . . . . . . . . . . . . . . . . . . 47
9 Nona lezione (Filippo Callegaro, 3/11/2009) 499.1 SU(2) e S3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 499.2 sottogruppi finiti di O(2) . . . . . . . . . . . . . . . . . . . . . . . . . . . 509.3 Varie sui gruppi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
10 Decima lezione (Angelo Vistoli, 04/11/2009) 5310.1 Richiami e notazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5310.2 Funzioni e determinanti . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
10.2.1 Confronto con la precedente definizione . . . . . . . . . . . . . . . 5410.3 Rango . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
11 Undicesima lezione (Filippo Callegaro, 10/11/2009) 6111.1 Qualche esercizio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6111.2 Conteggi di orbite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6211.3 Applicazioni a dimostrazioni di struttura dei gruppi . . . . . . . . . . . . 6411.4 Classificazione dei sottogruppi finiti di SO(3) . . . . . . . . . . . . . . . 65
12 Dodicesima lezione (Angelo Vistoli, 11/11/2009) 6912.1 Decomponibilita in potenze esterne . . . . . . . . . . . . . . . . . . . . . 6912.2 Prodotti tensoriali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
12.2.1 Basi di prodotti tensoriali e teoremi di rappresentazione . . . . . . 70
13 Tredicesima lezione (Filippo Callegaro, 17/11/2009) 7313.1 Sottogruppi finiti di SO(3) . . . . . . . . . . . . . . . . . . . . . . . . . . 73
13.1.1 Gruppo ciclico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7313.1.2 Gruppo diedrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7413.1.3 Isometrie dei solidi platonici . . . . . . . . . . . . . . . . . . . . . 7413.1.4 Isometrie del tetraedro . . . . . . . . . . . . . . . . . . . . . . . . 75
220

13.1.5 Isometrie del cubo . . . . . . . . . . . . . . . . . . . . . . . . . . 7513.1.6 Isometrie del dodecaedro . . . . . . . . . . . . . . . . . . . . . . . 75
13.2 Gruppo simmetrico e segnatura . . . . . . . . . . . . . . . . . . . . . . . 7613.2.1 Scrittura in cicli . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7613.2.2 Decomposizione in trasposizioni . . . . . . . . . . . . . . . . . . . 7613.2.3 Segnatura di una permutazione . . . . . . . . . . . . . . . . . . . 7713.2.4 Matrici e segnatura . . . . . . . . . . . . . . . . . . . . . . . . . . 78
14 Quattordicesima lezione (Angelo Vistoli, 18/11/2009) 7914.1 Richiami e notazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7914.2 Applicazioni tra prodotti tensoriali . . . . . . . . . . . . . . . . . . . . . 79
14.2.1 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8014.3 Qualcosa sugli spazi duali . . . . . . . . . . . . . . . . . . . . . . . . . . 81
14.3.1 Il duale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8114.3.2 Le applicazioni lineari fra spazi vettoriali e il duale . . . . . . . . 81
15 Quidicesima lezione (Filippo Callegaro, 24/11/2009) 8315.1 Digressione sul gruppo simmetrico Sn . . . . . . . . . . . . . . . . . . . . 83
15.1.1 Sn+1 come il gruppo di simmetrie di un n-simplesso standard . . . 8315.2 Isometrie dell’icosaedro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
15.2.1 Isometrie del semiipercubo . . . . . . . . . . . . . . . . . . . . . . 9015.3 Qualcosa sui gruppi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
15.3.1 Teorema di Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . 9015.3.2 Teorema di Bezout . . . . . . . . . . . . . . . . . . . . . . . . . . 9115.3.3 Azioni di gruppo . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
16 Sedicesima lezione (Angelo Vistoli, 25/11/2009) 9316.1 Richiami sul polinomio minimo . . . . . . . . . . . . . . . . . . . . . . . 9316.2 Teoria della Rappresentazione . . . . . . . . . . . . . . . . . . . . . . . . 94
16.2.1 Rappresentazioni di alcuni gruppi semplici . . . . . . . . . . . . . 9516.2.2 Digressione sugli operatori T t.c. T 2 = id . . . . . . . . . . . . . . 9516.2.3 Rappresentazioni dei gruppi ciclici . . . . . . . . . . . . . . . . . . 9616.2.4 Una proprieta delle radici primitive di 1 . . . . . . . . . . . . . . 9716.2.5 Operatori in dimensione infinita, caso n = 3 . . . . . . . . . . . . 9716.2.6 Rappresentazioni di C2 × C2 . . . . . . . . . . . . . . . . . . . . . 9816.2.7 Decomposizione di uno spazio vettoriale e caratteri: caso del gruppo
ciclico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
17 Diciassettesima lezione (Filippo Callegaro, 01/12/2009) 10117.1 Considerazioni sui gruppi O(n) . . . . . . . . . . . . . . . . . . . . . . . 10117.2 Studio del gruppo unitario SO(4) . . . . . . . . . . . . . . . . . . . . . . 10217.3 Considerazioni sulle rappresentazioni di gruppi . . . . . . . . . . . . . . . 103
18 Diciottesima lezione (Angelo Vistoli, 02/12/2009) 10518.1 Lemma 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10518.2 Esempio 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10518.3 Lemma 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
221
18.4 Esempio 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
18.4.1 V−1,−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
18.4.2 V1,−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
18.4.3 V−1,1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
18.4.4 V1,1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
19 Diciannovesima lezione (Angelo Vistoli, 09/12/2009) 109
19.1 Omomorfismi di rappresentazioni . . . . . . . . . . . . . . . . . . . . . . 109
19.2 Rappresentazioni isomorfe . . . . . . . . . . . . . . . . . . . . . . . . . . 109
19.3 Grado di una rappresentazione . . . . . . . . . . . . . . . . . . . . . . . . 110
19.4 Sottospazio degli omomorfismi di rappresentazioni . . . . . . . . . . . . . 110
19.5 Vettori invarianti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
19.6 Decomposizione di gruppi abeliani finiti. . . . . . . . . . . . . . . . . . . 111
20 Ventesima lezione (Filippo Callegaro, 15/12/2009) 113
20.1 Rappresentazioni di un gruppo . . . . . . . . . . . . . . . . . . . . . . . . 113
20.1.1 Altre definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
20.2 Rappresentazioni uni-dimensionali complesse . . . . . . . . . . . . . . . . 114
20.3 Rappresentazioni di S1 ⊂ C∗ . . . . . . . . . . . . . . . . . . . . . . . . . 114
20.3.1 Rappresentazioni di S1 in GL(C) . . . . . . . . . . . . . . . . . . 116
20.4 Conclusioni ed esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
21 Ventunesima lezione (Filippo Callegaro, 16/12/2009) 119
21.1 Rappresentazioni reali di S1 . . . . . . . . . . . . . . . . . . . . . . . . . 119
21.2 Varie sulle rappresentazioni . . . . . . . . . . . . . . . . . . . . . . . . . 120
21.2.1 Rappresentazioni equivalenti ed unitarie . . . . . . . . . . . . . . 120
21.3 Integrali su gruppi topologici . . . . . . . . . . . . . . . . . . . . . . . . . 121
21.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
22 Ventiduesima lezione (Filippo Callegaro, 23/02/2009) 123
22.1 Nota . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
22.2 Richiami e notazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
22.3 Riscaldamento per il grande salto . . . . . . . . . . . . . . . . . . . . . . 123
22.3.1 First step - Rappresentazioni di S1 . . . . . . . . . . . . . . . . . 123
22.3.2 Second step - Rappresentazioni di (S1)k . . . . . . . . . . . . . . 124
22.4 Esercizio de la muerte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
23 Ventitreesima lezione (Angelo Vistoli, 25/02/2010) 127
23.1 Richiami . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
23.2 Rappresentazioni per permutazioni . . . . . . . . . . . . . . . . . . . . . 127
23.3 Operazioni sulle rappresentazioni . . . . . . . . . . . . . . . . . . . . . . 128
23.3.1 Somma di rappresentazioni . . . . . . . . . . . . . . . . . . . . . . 128
23.3.2 Prodotto di rappresentazioni . . . . . . . . . . . . . . . . . . . . . 129
23.4 Carattere di una rappresentazione . . . . . . . . . . . . . . . . . . . . . . 130
222

24 Ventiquattresima lezione (Angelo Vistoli, 3/3/2010) 13124.1 Caratteri di un gruppo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13124.2 Duale di una rappresentazione. . . . . . . . . . . . . . . . . . . . . . . . 13124.3 Caratere della rappresentazione duale . . . . . . . . . . . . . . . . . . . . 132
25 Venticinquesima lezione (Filippo Callegaro, 09/03/2010) 13325.1 Previously . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13325.2 Immersioni di S1 in SU(2) . . . . . . . . . . . . . . . . . . . . . . . . . . 13325.3 Digressione: ancora S1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13525.4 Le rappresentazioni di SU(2) sono semisemplici . . . . . . . . . . . . . . 13625.5 Integrali su gruppi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
26 Ventiseiesima lezione (Filippo Callegaro, 10/03/2010) 13926.1 Lemma di Schur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13926.2 Unicita della decomposizione in irriducibili . . . . . . . . . . . . . . . . . 140
26.2.1 Esecizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14126.3 Proprieta della traccia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14126.4 Integrali e funzioni lineari . . . . . . . . . . . . . . . . . . . . . . . . . . 14226.5 Verso il teorema di ortogonalita dei caratteri . . . . . . . . . . . . . . . . 142
27 Ventisettesima lezione (Angelo Vistoli, 16/03/2010) 14527.1 Caratteri di rappresentazioni . . . . . . . . . . . . . . . . . . . . . . . . . 14527.2 Rappresentazioni regolari . . . . . . . . . . . . . . . . . . . . . . . . . . . 14527.3 Scomposizione in rappresentazioni irriducibili . . . . . . . . . . . . . . . . 14627.4 Base ortonormale per CG . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
28 Ventottesima lezione (Angelo Vistoli, 17/03/2010) 15128.1 Relazione di ortagonalita fra caratteri e conseguenze . . . . . . . . . . . . 15128.2 Classi di coniugio e funzioni di classe . . . . . . . . . . . . . . . . . . . . 15228.3 Tabelle di caratteri e studio delle rappresentazioni irriducibili di alcuni
gruppi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15328.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
29 Ventinovesima lezione (Filippo Callegaro, 23/03/2010) 15529.1 Verso il teorema di ortogonalita dei caratteri irriducibli . . . . . . . . . . 15529.2 Caratteri irriducibili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
30 Trentesima lezione (Angelo Vistoli, 24/03/2010) 15930.1 Rappresentazioni di S4: tabella dei caratteri . . . . . . . . . . . . . . . . 15930.2 Lemma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16030.3 Studio di σ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16030.4 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
31 Trentunesima lezione (Filippo Callegaro, 14/04/2010) 16331.1 Potenze simmetriche ed algebra simmetrica . . . . . . . . . . . . . . . . . 163
31.1.1 Azione sulla potenza simmetrica . . . . . . . . . . . . . . . . . . . 16431.2 Rappresentazioni irriducibili di SU(2) . . . . . . . . . . . . . . . . . . . . 164
223
31.2.1 Irriducibilita delle Vn . . . . . . . . . . . . . . . . . . . . . . . . . 16531.2.2 Le Vn sono tutte le rappresentazioni irriducibili . . . . . . . . . . 166
31.3 Rappresentazioni irriducibili di SO(3) . . . . . . . . . . . . . . . . . . . . 16731.4 Operazioni tra rappresentazioni di SU(2) . . . . . . . . . . . . . . . . . . 167
32 Trentaduesima lezione (Filippo Callegaro, 20/04/2010) 16932.1 Riassunto puntate precedenti . . . . . . . . . . . . . . . . . . . . . . . . 16932.2 Risoluzione di alcuni esercizi . . . . . . . . . . . . . . . . . . . . . . . . . 16932.3 Prodotto tensoriale di rappresentazioni . . . . . . . . . . . . . . . . . . . 17132.4 Struttura di Vn ⊗ Vn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17232.5 Rappresentazioni dei prodotti . . . . . . . . . . . . . . . . . . . . . . . . 174
33 Trentatreesima lezione (Angelo Vistoli, 21/04/2010) 17533.1 Potenza esterna di una rappresetnazione . . . . . . . . . . . . . . . . . . 17533.2 tabella dei caratteri di S5 . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
34 Trentaquattresima lezione (Filippo Callegaro, 27/04/2010) 17934.1 Previously on Callegaro . . . . . . . . . . . . . . . . . . . . . . . . . . . 17934.2 Rappresentazioni di prodotti diretti . . . . . . . . . . . . . . . . . . . . . 180
34.2.1 Le rappresentazioni di O(3) . . . . . . . . . . . . . . . . . . . . . 18334.2.2 Le rappresentazioni di U(2) . . . . . . . . . . . . . . . . . . . . . 183
34.3 Armoniche sferiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
35 Trentacinquesima lezione (Angelo Vistoli, 28/04/2010) 18735.1 Classi di coniugio di A5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18735.2 Avvicinandosi ai gruppi di Lie . . . . . . . . . . . . . . . . . . . . . . . . 188
35.2.1 Regola della catena . . . . . . . . . . . . . . . . . . . . . . . . . . 18935.3 Teorema della mappa implicita . . . . . . . . . . . . . . . . . . . . . . . 189
36 Trentaseiesima lezione (Filippo Callegaro, 04/05/2010) 19136.1 Esponenziale di matrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19136.2 Proprieta dell’esponenziale di matrici . . . . . . . . . . . . . . . . . . . . 19236.3 Esponenziazione di matrici hermitiane . . . . . . . . . . . . . . . . . . . 19436.4 Algebre di Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
37 Trentasettesima lezione (Angelo Vistoli, 05/05/2010) 19737.1 Teorema della funzione inversa. . . . . . . . . . . . . . . . . . . . . . . . 197
38 Trentottesima lezione (Filippo Callegaro, 11/05/2010) 20138.1 Sottoalgebre di Lie ed omomorfismi . . . . . . . . . . . . . . . . . . . . . 20138.2 Costanti di struttura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20138.3 Decomposizione di GLn(C) . . . . . . . . . . . . . . . . . . . . . . . . . . 20238.4 Proprieta della mappa esponenziale . . . . . . . . . . . . . . . . . . . . . 20338.5 Come costruire delle algebre di Lie . . . . . . . . . . . . . . . . . . . . . 204
39 Trentanovesima lezione (Angelo Vistoli, 12/05/2010) 20939.1 Varieta e sistemi di coordinate intorno ad un punto . . . . . . . . . . . . 209
224

40 Quarantesima lezione (Filippo Callegaro, 18/05/2010) 21140.1 Omeomorfismo tra pn e Pn . . . . . . . . . . . . . . . . . . . . . . . . . . 21140.2 Alcune algebre di Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
41 Quarantunesima lezione (Angelo Vistoli, 19/05/2010) 21541.1 Qualche proprieta dei gruppi di Lie . . . . . . . . . . . . . . . . . . . . . 21541.2 Alcuni importanti gruppi di Lie . . . . . . . . . . . . . . . . . . . . . . . 216
41.2.1 SLn(R) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21641.2.2 On(R) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21641.2.3 Un . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21741.2.4 SUn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
225


















