11
25
Il Global Positioning Il Global Positioning System System (GPS) (GPS)
-
Upload
samantharao -
Category
Documents
-
view
2 -
download
0
description
Dispense di monitoraggio geomatico.
Transcript of 11
-
Il Global Positioning Il Global Positioning SystemSystem(GPS)(GPS)
-
Sistema di posizionamento globale basato su: emissione di segnali elettromagnetici da satelliti artificiali
stazioni riceventi (calcolano tempo e distanze dal satellite)
Campi di applicazione terrestre (rilievi a varie scale, monitoraggio di deformazioni, posizionamento veicoli)
marino (rilievi batimetrici, studi oceanografici, posizionamento imbarcazioni)
aereo e spaziale (rilievi fotogrammetrici, posizionamento di velivoli e satelliti artificiali)
Global Positioning System (GPS)Global Positioning System (GPS)
-
VANTAGGI SVANTAGGI
Semplicit misure Necessit di vedere i satelliti solo allaperto
Precisione risultati Sensibilit ai disturbi elettromagnetici
Rapidit rilievoPrecisione non uniforme in
planimetria e quota (minore)
Non necessaria intervisibilit dei punti della base
Inesistenza di limiti massimi sulle distanze
Necessit di occupare i punti da misurare
Unicit sistema di riferimento in planimetria e altimetria
Diversit tra il sistema GPS e il sistema geodetico nazionale
Operativit notturna o con cattive condizioni meteorologiche
-
UTMUTM--WGS84WGS84
Sistema cartesiano geocentricoOrigine : cento di massa terraAsse z : parallelo direzione polo convenzionaleterrestreAsse x : intersezione tra piano equatorialeperpendicolare a z e piano meridiano di GreenwhichAsse y : completa la terna cartesiana destrorsa
Ellissoide geocentrico Semiasse maggiore a = 6378,137 m Schiacciamento f = 1/298,257
La La reterete IGM95IGM95Rete geodetica italiana basata sulsistema GPS1150 vertici (di posizione nota) distribuiti sul territorio italianodensit 1 ogni 300 km2 circa vertice GPS presente, in ogni puntodItalia, ad una distanza inferiore a 10 kmMolti punti collocati in coincidenzao vicino a vertci trigonometriciclassici permettonotrasformazioni tra WGS84 e ROMA40 (sistema convenzionaleitaliano)circa 400 vertici collegati a capisaldi di livellazione hannoanche quota geoidicadeterminazione ondulazione geoide
Quota ellissoidica (h) Distanza tra il punto P la sua proiezionesullellissoide (lungo la normale)Quota geoidica (H) Distanza tra il punto P e lintersezione dellalinea di forza del campo di gravit, passante per P, e il geoideOndulazione geoide (N) N=h-H
-
Il Il segnalesegnale GPSGPSPORTANTI + CODICE + MESSAGGIOSegnale elettromagnetico continuoFrequenza fondamentale f0= 10.23 MHz
PORTANTI: L1 fL1= 154*f0= 1572.42 MHz L1= 19 cmL2 fL2= 120*f0= 1227.60 MHz L2= 24 cm
=cT
-
ErroriErrori del del sistemasistema GPSGPS
-
Come Come eliminiamoeliminiamo gligli errorierrori??ERRORI ACCIDENTALI (di osservazione)
Inferiori rispetto a quelli sistematiciContenuti attraverso idonea configurazione hardware e unopportuna scelta deipunti di stazione.
ERRORI SISTEMATICI (di modello)
Rimossi con particolari procedimenti operativi e con la combinazione delleosservazioni
METODI DIFFERENZIALI (per scopi geodetici di alta precisione e cartografici)
Osservabili: opportune differenze delle equazioni di osservazione delle misure difase riduzione o eliminazione errori sistematici in comune
Singole differenze tra ricevitoriSingole differenze tra satellitiDoppie differenzeDifferenze triple
-
TIPO DI OSSERVABILEMisure di fase: (principalmente) rilievo geodeticoMisure di pseudorange: navigazione precisione inferiore
Precisione teorica: 1/100 lC/A 3 m P 30 cm Portanti 2 mm
TRATTAMENTO DEI DATITempo reale
Solo per la navigazione, misure in pseudorange (assoluto o relativo) accuratezza non molto elevataPost processing
Usa misure registrate dal ric., possibilit di affinaremodellizzazione cause errori, possibilit di usare effemeridiprecise
-
ModalitModalit didi posizionamentoposizionamento
Posizionamento assolutoCoordinate di un vertice misurate in un sistema di riferimento
globalePosizionamento relativo
Determinazione delle componenti del vettore baseline cheunisce due vertici. riduzione errori sistematici comuniPosizionamento differenziale
Tra due vertici, correzione differenziale (calcolata su unastazione base) del range sat.-ric. riduzione o eliminazioneerrori sistematiciMisure staticheMisure cinematichePosizionamento in post-elaborazionePosizionamento in tempo reale
-
Posizionamento assoluto
Determinazione coordinate dei punti senza differenziazioniRimangono errori sistematici (effemeridi, orologi, atm.) 30 m Applicazioni: navigazionali con misure di pseudorange, non topografiche
Precisione:
Con S/A 100 m planimetria, 150 m altimetriaSenza S/A (1020 m)
-
Determinazione vettore base-line tra stazioni diverse
Elaborazione a posteriori differenze doppie di fase tra ric. base e mobileMinore la base (rispetto alla distanza sat.-ric.) pi si annullano errori comuni ad entrambe le osservabili (orbite, sincronia orologi, rifrazione atmosferica)
AB A : punto di coordinate noteB: punto di coordinate incognite
bAB : vettore di base
=
=
B
B
B
AB
AB
AB
AB
Z
Y
X
ZZ
YY
XX
b
Possibile sia su misure di codice che di fase. In pratica si applica solo sulle misure di fase
Si considerano combinazioni lineari delle misure di fase: Singole differenze Doppie differenze Triple differenze
Il Il posizionamentoposizionamento relativorelativo
-
MODALIT DEL POSIZIONAMENTO RELATIVO
StaticoRicevitore fisso in un punto per tutte le epoche di misura, generalmente per pi di unora, dipende da lunghezza base, numero sat., qualit modellodi rifrazione, utilizzo GPS a singola o doppia frequenzaRilievo relativo precisione qualche mm per km
Rapido staticoSimile allo statico, tempi di stazionamento pi brevi (5-10 min), ognistazione = sezione di misura indipendentePrecisione qualche mm per km, lunghezza massima basi 5-10 km
CinematicoUn ric. fisso, uno o pi ric. in movimento effettuando osservazioni per breviperiodi di tempoTutti i ric. devono agganciare almeno 4 sat. comuni per tutta la durata del rilievoAmbiguit di fase tra ric. devono essere note posizioni = unicheincognite eq. alle differenze secondeInizializzazione (valutazione a priori delle amb. di fase) rilievo di unapiccola base in modalit statica o rapido statica
-
Proceduraoperativa
Tempi dimisura
Lunhezzabasi
Precisione Rate (s)Settori diutilizzo
Statico
> ora1 ora
34 orevariabile
10 km2030 km> 100 km
10-610-8 1560 Reti inquadramentoalta precisione
Rapido-statico2030 min (L1)68 min (L2)
< 1015 km 10-6 515 Reti inquadramentoalta precisione
CinematicoStop and go
-
Misure di faseEffettuate su onda portante demodulata: confronto fra onda
ricevuta e onda di riferimento generata nel ric.Range sat.-ric. : somma di due componenti:
numero intero di cicli Nji ambiguit di faseparte frazionaria ji(t0)
sfasamento tra la fase dellonda portante del sat., ricevutadal GPS a t0 e la fase della copia portante generata dalric.A tt0 stessa ambiguit di fase (se non si perde ilcontatto con il sat. cycle slip), diversa parte frazionaria
-
)()(1)( tfNtt jijj
ij
ij
i ++=
Misure di fase
ji(t) : misura di fase espressa in cicli (0ji1) : lunghezza dondaji(t) : range geometricoNji : ambiguit di fase (indipendente da t)fj : frequenza segnale sat.ji(t) : combinazione errori orologi sat. e ric.
)()(1)( tfNtft ijj
ij
ijjj
i +=
fjj : errore orologio sat.fii : errore orologio ric.
Precisione massima ottenibile (1% ):L1=19 cm ordine incertezza 1-2 mmL2=24 cm ordine incertezza 1-2 mm
-
Singole differenze tra ricevitoriDue ricevitori che vedono lo stesso satelliteDifferenza di fase: elimina biases satelliti (errori orologi e orbita) riduce (su basi corte, < 10-15 km) ritardiatmosferici il segnale attraversa stessaporzione di atmosfera rimangono errore orologio ric. e ambiguit difase differenze prime non adatte per scopigeodetici-topografici utile per definire orbita del sat. se ric. = stazioni segmento di controllo
Misura ritardo tempo (dt) tra ricezione segnale dai due ricevitori Determinazione (nel sist. di rif. del GPS) vettore che congiungei punti stazione Un punto noto Determinazione posizione del secondo rispetto al primo
-
Singole differenze tra satelliti
Due satelliti che vedono lo stesso ricevitoreDifferenza di fase: elimina errore orologio ricevitore non utilizzabili praticamente definiscono un posizionamentoassoluto, la cui precisione dipende dalla bont delle effemeridiinsufficiente per scopi geodetici
-
Doppie differenzeDue ricevitori (A e B) che vedonocontemporaneamente due diversisatelliti (j e k) sottrazione didue eq. alle differenze prime tradue sat. alla stessa epocaDifferenza di fase: elimina errori sistematicidovuti a orologi ricevitori e satelliti riduce (su basi corte) erroripropagazione nellatm. consente determinazioneambiguit iniziali di fase come numeri interi aumenta rumore su misure difase (doppio) legge dipropagazione covarianza
Se ambiguit di fasedeterminate in precedenza solo posizione incognita
jkAB
jkAB
jkAB Ntt += )(
1)(
-
Triple differenze
iniziale) valore2(2
Differenza tra due equazioni alle differenze doppie, calcolate in istanti diversi (t1 e t2) elimina errori sistematici (orologi ric. e sat.) indipendente dalle ambiguit iniziali di fase consente identificazione e correzione dei cycle slips peggioramento qualit misure aumento rumore
)(1)( 1212 ttjkAB
jkAB
=
-
Il posizionamento differenziale DGPS
Utilizza due o pi ricevitori: vertice A posizione nota (stazione base) vertice B incognito e solitamente in movimento (stazione
remota)Stazione base: calcola la propria posizione assoluta la confronta con la distanza reale sat.-ric. (stimata con
elevata precisione dato che posizione ric. nota) calcola differenza tra valori misurati e calcolati correzione trasmette le correzioni alla stazione remota
Stazione remota: Riceve correzioni trasmesse dalla base Calcola coordinate corrette applicando correzioni ricevute
dalla base
-
ProgrammazioneProgrammazione rilievirilievi GPSGPSScelta del sito di misura
Progettazione su una cartografia Ricognizione sul posto per verificare:
assenza ostacoli sopra unelevazione di 15 assenza di superfici riflettenti assenza di campi elettromagnetici
Scelta della finestra dosservazione
La precisione della misura dipende da: numero satelliti osservati distribuzione spaziale dei satelliti bont geometrica della configurazione definita dallindice GDOP
(Geometric diluition of precision):
2222TZYXPDOP +++= 222 ZYXGDOP ++=
-
Buona configurazione geometrica
(basso valore GDOP)
Cattiva configurazione geometrica
(elevato valore GDOP)
Se tutti i satelliti si trovano nello stesso quadrante la precisione bassa.
Se i satelliti sono allineati la precisione bassa.
E auspicabile che i satelliti siano ben distribuiti nella volta celeste.
-
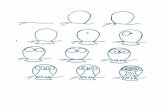
Numero dei satelliti e PDOP
Skyplot: rappresentazionepolare del percorso sullasfera celeste dei sat. in funzione della loroelevazione e azimut
-
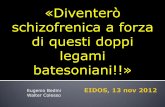
Setup of a Total Station with direct serial
Remote Setup of a Total Station with Radio
Setup of real-time GPS with GMX902 Sensors
Setup of a GPS Sensor co-located with a Total Station
Il Global Positioning System(GPS)UTM-WGS84Il segnale GPSErrori del sistema GPSCome eliminiamo gli errori?Modalit di posizionamentoDeterminazione vettore base-line tra stazioni diverseElaborazione a posteriori differenze doppie di fase tra ric. base e moMisure di faseSingole differenze tra ricevitori Singole differenze tra satellitiDoppie differenzeTriple differenzeIl posizionamento differenziale DGPSProgrammazione rilievi GPS