1. FILTRI ADATTATIVI PER USO BIOMEDICO 1.1 INTRODUZIONE · l’ultima equazione è nota come...
33
Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico 1. FILTRI ADATTATIVI PER USO BIOMEDICO 1.1 INTRODUZIONE Scopo del filtraggio del segnale è il miglioramento del rapporto segnale-rumore mediante soppressione o attenuazione delle componenti spettrali dovute al rumore. Un filtro numerico è un algoritmo che trasforma una sequenza di campioni d’ingresso in una sequenza di uscita che dipende da quella d’ingresso ma ne differisce per alcune caratteristiche, tipicamente per il contenuto spettrale. Una caratteristica fondamentale dei filtri numerici è la possibilità di realizzare filtri a fase lineare e filtri a sfasamento nullo (zero phase); questi ultimi non introducono nel segnale filtrato ritardi né sfasamenti rispetto al segnale di ingresso, i primi introducono un ritardo, del quale bisogna tenere conto nel caso in cui si stimino le latenze (ritardi) rispetto agli stimoli, ma non alterano le relazioni di fase tra le componenti spettrali del segnale lasciandone inalterata la morfologia. Questo è particolarmente rilevante nella elaborazione di segnali biologici nei quali è spesso proprio la forma del segnale che racchiude importanti informazioni di tipo diagnostico e fisiopatologico. Quando il segnale ed il rumore sono stazionari e le loro caratteristiche sono approssimativamente conosciute, o possono essere ritenute tali, è possibile il progetto "a priori" di un filtro "ottimo", come nel caso dei filtri di Wiener. Se, invece, non è disponibile alcuna conoscenza a priori del segnale e/o del rumore, o quando questi si presentano non stazionari, ciò non è possibile. I filtri adattativi sono filtri la cui risposta in frequenza varia in funzione delle caratteristiche del segnale in ingresso. Il processo di adattamento viene realizzato in modo tale che il filtro adoperi il segnale in ingresso per adattare i suoi propri parametri al fine di ottimizzare un predeterminato indice di prestazione. I filtri adattativi richiedono quindi solo una piccola se non alcuna conoscenza a priori delle caratteristiche del segnale e del rumore in ingresso. In generale un filtro adattativo dopo un periodo iniziale di apprendimento e di adattamento durante il quale le sue prestazioni risultano insoddisfacenti tende a seguire le variazioni non stazionarie delle statistiche del segnale e del rumore con delle prestazioni dipendenti dalla bontà dell'algoritmo. Il tempo di adattamento risulta quindi un'importante caratteristica del filtro: segnali nei quali sono attese rapide variazioni richiederanno, infatti, filtri che vi si possano adattare rapidamente. Di seguito è presentata la struttura generale di un filtro adattativo cui segue la discussione di un filtro adattativo con minimizzazione dell’errore quadratico medio, di un filtro per la cancellazione adattativa del rumore con o senza un ingresso di riferimento e quella di un filtro per l'estrazione di segnali periodici immersi in rumori ad ampio spettro. 1
Transcript of 1. FILTRI ADATTATIVI PER USO BIOMEDICO 1.1 INTRODUZIONE · l’ultima equazione è nota come...

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
1. FILTRI ADATTATIVI PER USO BIOMEDICO 1.1 INTRODUZIONE
Scopo del filtraggio del segnale è il miglioramento del rapporto segnale-rumore mediante soppressione o attenuazione delle componenti spettrali dovute al rumore. Un filtro numerico è un algoritmo che trasforma una sequenza di campioni d’ingresso in una sequenza di uscita che dipende da quella d’ingresso ma ne differisce per alcune caratteristiche, tipicamente per il contenuto spettrale. Una caratteristica fondamentale dei filtri numerici è la possibilità di realizzare filtri a fase lineare e filtri a sfasamento nullo (zero phase); questi ultimi non introducono nel segnale filtrato ritardi né sfasamenti rispetto al segnale di ingresso, i primi introducono un ritardo, del quale bisogna tenere conto nel caso in cui si stimino le latenze (ritardi) rispetto agli stimoli, ma non alterano le relazioni di fase tra le componenti spettrali del segnale lasciandone inalterata la morfologia. Questo è particolarmente rilevante nella elaborazione di segnali biologici nei quali è spesso proprio la forma del segnale che racchiude importanti informazioni di tipo diagnostico e fisiopatologico.
Quando il segnale ed il rumore sono stazionari e le loro caratteristiche sono approssimativamente conosciute, o possono essere ritenute tali, è possibile il progetto "a priori" di un filtro "ottimo", come nel caso dei filtri di Wiener. Se, invece, non è disponibile alcuna conoscenza a priori del segnale e/o del rumore, o quando questi si presentano non stazionari, ciò non è possibile.
I filtri adattativi sono filtri la cui risposta in frequenza varia in funzione delle caratteristiche del segnale in ingresso. Il processo di adattamento viene realizzato in modo tale che il filtro adoperi il segnale in ingresso per adattare i suoi propri parametri al fine di ottimizzare un predeterminato indice di prestazione. I filtri adattativi richiedono quindi solo una piccola se non alcuna conoscenza a priori delle caratteristiche del segnale e del rumore in ingresso.
In generale un filtro adattativo dopo un periodo iniziale di apprendimento e di adattamento durante il quale le sue prestazioni risultano insoddisfacenti tende a seguire le variazioni non stazionarie delle statistiche del segnale e del rumore con delle prestazioni dipendenti dalla bontà dell'algoritmo. Il tempo di adattamento risulta quindi un'importante caratteristica del filtro: segnali nei quali sono attese rapide variazioni richiederanno, infatti, filtri che vi si possano adattare rapidamente.
Di seguito è presentata la struttura generale di un filtro adattativo cui segue la discussione di un filtro adattativo con minimizzazione dell’errore quadratico medio, di un filtro per la cancellazione adattativa del rumore con o senza un ingresso di riferimento e quella di un filtro per l'estrazione di segnali periodici immersi in rumori ad ampio spettro.
1

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
1.2 STRUTTURA GENERALE DI UN FILTRO ADATTATIVO
Un filtro adattativo si può pensare costituito essenzialmente di tre parti principali: l'indice di prestazione cui si riferisce il criterio di ottimo prescelto l’algoritmo che calcola i parametri del filtro sulla base della massimizzazione
dell’indice di prestazione la struttura del filtro che realizza le operazioni di filtraggio sul segnale. E’ possibile classificare i filtri adattativi secondo la differente realizzazione delle tre
parti che li costituiscono e degli scopi che si prefiggono. La scelta dell’indice di prestazione va operata in funzione del tipo di applicazione.
Ad esempio nella scelta di un filtro adattativo per l'eliminazione dell’ECG materno nel monitoraggio automatico dell’ECG fetale, l’indice di prestazione potrebbe essere dato dalla minimizzazione del numero di false detezioni. Questo però risulta un criterio di difficile implementazione, poiché in generale non possiamo sapere quando è avvenuta una falsa detezione del battito cardiaco fetale. Pertanto nella pratica si ricercano criteri di ottimizzazione che possano essere implementati in maniera semplice e chiara. In molte applicazioni la minimizzazione del valor quadratico medio di un segnale di errore prelevato in uscita risulta essere un soddisfacente indice di prestazione.
L’algoritmo è il meccanismo per mezzo del quale i parametri vengono calcolati
mediante il criterio di ottimizzazione prescelto. Fondamentalmente vengono adoperati due tipi di algoritmi.
Il primo è un algoritmo di tipo non ricorsivo. Esso richiede la collezione di tutti i campioni in una data finestra temporale e la soluzione di un sistema di equazioni. Il metodo esatto dei minimi quadrati è un esempio di tale algoritmo e richiede la soluzione di un sistema di equazioni lineari che come noto si riconduce essenzialmente ad un problema di inversione matriciale. Il risultato di un tale filtraggio non è quindi disponibile in tempo reale ma solo al termine dell'acquisizione dell'intera finestra temporale prescelta.
Il secondo è un algoritmo di tipo ricorsivo la cui uscita si aggiorna all’arrivo di ogni nuovo campione o di un piccolo gruppo di campioni dall’ingresso. Tale metodo richiede solitamente un controllo sulla convergenza dell’algoritmo. I risultati sono disponibili immediatamente ed è inoltre possibile seguire anche segnali dalla caratterizzazione statistica non stazionaria.
La struttura del filtro che realizza le operazioni di filtraggio sul segnale conferisce
determinate caratteristiche di robustezza, convergenza e sensibilità dell'algoritmo la cui trattazione esula dal contenuto dei presenti appunti.
2

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
1.3 FILTRO ADATTATIVO CON MINIMIZZAZIONE DELL'ERRORE QUADRATICO MEDIO (LMS ADAPTATIVE FILTER)
Discuteremo di seguito il filtro adattativo con minimizzazione dell'errore quadratico
medio sviluppato da Widrow e Hoff nel 1960. In generale tale sistema può essere pensato composto da una serie di ingressi di
riferimento più un ingresso addizionale detto ingresso primario, da una struttura che realizza una combinazione lineare pesata con guadagni variabili (adaptative linear combiner) e da un algoritmo adattativo (LMS adaptative algorithm) che calcola il vettore dei valori dei pesi.
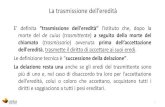
Tale struttura, di seguito discussa come a sé stante, può essere aggiunta a differenti configurazioni realizzando una grande varietà di applicazioni dedicate a soluzioni più particolari.
Figura 1: schema generale di filtro adattativo
Σ1
x1
0
xn
1
+
y
-Σ
++
+
ε
n
Gli ingressi come vedremo più avanti risultano deriva dallo stesso segnale di
ingresso, così come l’ingresso primario (Quest’ull’ingresso desiderato, in quanto se così fosse non vi sarebbma, come sarà chiaro nel seguito, potrà essere considerato ta
ijx
jd
Supponiamo di avere un insieme di N ingressi discreti kjx
tempo. Definiamo il vettore di ingresso jX di dimensione n+
[ ]njjTj xxX ,,0 L= (1.1)
Definiamo inoltre un vettore di guadagni variabili
ti
Algoritmo Adattativo
w
ww
time ale
k
1
x
o non è esattamente lcun motivo di filtrarlo, ai fini del filtraggio).
n,1,L= dove j denota il .
3

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
[ ]nT wwW ,,0 L= (1.2)
dove anche w0 è posto solitamente pari ad 1. Definiamo quindi come stima del segnale di uscita
∑=
===N
i
Tjj
Tijij WXXWxws
0
ˆ (1.3)
e definiamo l’errore tra il segnale desiderato e la sua stima
WXdXWdsd T
jjjT
jjjj −=−=−= ˆε (1.4) L’indice di prestazione prescelto per questo tipo di filtro, il valore dell’errore
quadratico medio, è calcolato quadrando e mediando l’equazione 1.4, assumendo che gli ingressi di riferimento e quelli primari siano costanti ed i pesi fissati.
Compito di tale algoritmo è quello di calcolare il valore del vettore dei pesi W così da minimizzare l’errore quadratico medio atteso.
Pertanto si ha
{ } { } { } { }WXXEWWXdEdEE Tjj
TTjjjj +−= 222ε (1.5)
definendo il vettore p come la cross-correlazione tra d e x
{ }Tjj
T XdEp = (1.6) denotando la matrice R di correlazione dei valori di ingresso, simmetrica e definita
positiva
{ }Tjj XXER = (1.7)
si ha che l’errore quadratico medio può essere espresso come una funzione
quadratica dei pesi
{ } { } WRWWpdEE TTjj +−= 222ε (1.8)
Nel caso stazionario la minimizzazione di tale equazione comporta il calcolo del gradiente e la determinazione del vettore Wopt che lo annulla. Il gradiente può essere calcolato utilizzando le seguenti formule:
4

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
WRW
WRWpW
Wp TT
2 ; 22
=∂
∂=
∂
∂
da cui
{ } { }022,,
2
0
2
=+−=⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂
∂
∂
∂=∇ opt
n
jjj WRp
wE
wE εε
L
(1.9)
avremo quindi che
pRW opt1−= (1.10)
che è la forma matriciale dell’equazione di Wiener-Hopt. Nel caso non stazionario il punto di minimo risulta mobile e l’algoritmo di ricerca
del minimo deve adattare i pesi così da riuscire a seguire il più rapidamente e fedelmente possibile il punto di minimo.
L’algoritmo adoperato nella pratica non usa però direttamente la forma dell’equazione 1.10 per determinare la soluzione ottima ma si fonda su un metodo approssimato. Si calcola il vettore ottimo iterativamente ed ad ogni passo si cambia il vettore proporzionalmente all’opposto del vettore gradiente
jj1j 21WW ∇µ−=+ (1.11)
dove µ è uno scalare che controlla la stabilità e la velocità di convergenza
dell’algoritmo ed il pedice indica il numero dell’iterazione. Si noti che l’uso dell’equazione 1.11 non richiede inoltre il calcolo del vettore di cross-correlazione p né il calcolo della matrice di correlazione R e della sua inversione. Nella pratica inoltre è stata suggerita da Widrow la sostituzione del calcolo del gradiente con una sua stima approssimata
jj
T
n
jjj
T
n
jjj
T
n
jjj X
ws
ws
wwwwεε
εεε
εε2
ˆ,,
ˆ2,,2,,ˆ
00
2
0
2
−=⎥⎦
⎤⎢⎣
⎡∂
∂
∂
∂−=⎥
⎦
⎤⎢⎣
⎡∂
∂
∂
∂=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂
∂
∂
∂=∇ LLL (1.12)
ottenuta sostituendo l’espressione dell’errore data nella 1.4. La 1.11 può quindi
essere riscritta come
jjj1j XWW µε+=+ [Steepest descendent] (1.13)
l’ultima equazione è nota come l’algoritmo LMS di Widrow-Hoff.
5

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
L'equazione 1.13 risulta quindi piuttosto semplice da implementare e non richiede
né differenziazioni né inversioni matriciali. Per ciascuna iterazione essa richiede il calcolo di n+2 moltiplicazioni e n addizioni.
Figura 2: Filtro adattativo LMS
Σ
Wj+1= Wj+2µεjxj
sj
εj
x1 w0
w1
wn
εj
++
+
-
y
x
Σ+
x2
xi=d
z-1
z-1
z-1
µ
Consideriamo ora il caso in cui i valori del vettore degli ingressi di riferimento siano
ottenuti tramite la cascata di linee di ritardo sul segnale di ingresso primario. Il vettore degli ingressi di riferimento quindi sarà
[ ]11 ,,,1 +−−= njjTj xxX L (1.14)
e l’uscita della sommatoria data dalla struttura che realizza la combinazione lineare
sarà
∑=
+−+===N
iijij
Tjj xwwXWsx
110ˆˆ (1.15)
Il filtro LMS così realizzato è un filtro adattativo autoregressivo i cui coefficienti
sono adattati in modo ottimo così che l’uscita del filtro e l’ingresso desiderato presentino il minimo errore quadratico medio.
E' stato inoltre mostrato che il valore atteso del vettore dei pesi W converge al vettore dei pesi di Wiener dell’equazione 1.10 se gli ingressi di riferimento sono sufficientemente incorrelati nel tempo.
Una condizione necessaria e sufficiente per la convergenza è
02max
>µ>λ (1.16)
6

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
dove maxλ è il più grande autovalore della matrice di correlazione R. Gli autovalori
comunque non sono solitamente noti per cui si preferisce utilizzare una condizione sufficiente per la convergenza
( ) 01>> µ
RTr (1.17)
dove poiché R è definita positiva ( ) maxλ>RTr . La traccia di R è semplice da stimare
in quanto rappresenta la potenza totale dei segnali di riferimento. Va inoltre aggiunto che Widrow ha mostrato che la curva che descrive la
convergenza del vettore W al vettore di Wiener può essere approssimata da una funzione a decadimento esponenziale con costante di tempo pari a
( )
( )rTr41N
⋅µ+
=τ (1.18)
Il filtro appena descritto si presta inoltre a svariate applicazioni. Come mostrato di seguito esso può essere adoperato per la realizzazione di tecniche
di cancellazione adattativa del rumore con o senza un ingresso di riferimento e per l'estrazione di segnali periodici immersi in rumori ad ampio spettro, nonché a filtraggi adattativi multicanale o all'uso di sequenze temporali di filtri adattativi.
1.4 CANCELLAZIONE ADATTATIVA DEL RUMORE Si abbia un segnale disturbato da un rumore additivo, e si voglia cancellare il
rumore, lasciando il più possibile immutato il segnale; si deve disporre allora di due diverse misure, una consistente nel segnale disturbato (cioè segnale più rumore) ed un’altra consistente unicamente in un segnale correlato al rumore additivo che disturba il segnale del quale si vuole avere una misura precisa. Questo secondo segnale viene quindi filtrato e sottratto al segnale disturbato, in modo da ottenere il segnale pulito.
Come si vede, il filtro utilizzato sarà in generale adattativo, ed il metodo di controllo è fondato sulla soppressione della correlazione tra il rumore e l'uscita del cancellatore di rumore. In questo modo il disturbo viene attenuato o eliminato del tutto: in particolare se la misura del rumore che viene fatta non contiene tracce del segnale principale, il rumore additivo può essere completamente cancellato.
Un caso pratico che può chiarire la tecnica esposta è quello in cui si voglia misurare
il battito cardiaco fetale: anche in questo caso si utilizzano due segnali, il primo
7

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
consistente in un elettrocardiogramma addominale che rileverà il battito cardiaco fetale con sovrapposto il battito cardiaco materno ed il secondo in una misura del battito del solo cuore materno: a questo punto l'elettrocardiogramma materno viene opportunamente filtrato in maniera adattativa e sottratto al segnale ottenuto con l'elettrocardiogramma addominale.
Figura 3: Cancellatore adattativo di rumore
Σ
Wj+1= Wj+2µεjxj
εj=yi
d1 w0
w1
wn
εj
++
+
-
ni
d
Σ+
d2
z-1
z-1
di
z-1
si=yi+ni
µ
Nella figura 3 è rappresentato un generico cancellatore di rumore: y è il segnale
pulito, è il rumore additivo, s è la misura di segnale più rumore, ε è l'uscita del cancellatore di rumore e
i
ni i i
di è un vettore di lunghezza N, corrispondente alla misura degli ultimi N campioni di un rumore correlato al disturbo ni se si trattasse del caso ottimale, di dovrebbe essere totalmente incorrelato con il segnale si.
Possiamo scrivere
iTiii dWs −=ε (1.19)
iW è un vettore lungo N, corrispondente ai coefficienti della risposta all'impulso del filtro che rende il rumore misurato simile a ni.
Se la cancellazione di rumore fosse totale, la sequenza iε verrebbe a coincidere con
la sequenza yi: questo è praticamente impossibile a meno che non si possa misurare in maniera esatta il disturbo ni, cosa che in genere non avviene; ci accontentiamo allora di minimizzare il contributo quadratico medio del disturbo all’uscita, il che coincide appunto con l’annullamento della correlazione tra la sequenza iε uscita del
8

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
cancellatore e la sequenza di misura del rumore ambientale. Se la sequenza di fosse in qualche maniera correlata con la sequenza yi, la stima iε della sequenza yi risulterebbe distorta.
La risposta all’impulso del filtro viene adattata ad ogni passo secondo il seguente algoritmo:
( )( ) T
jiTii
Tj
Tj
Tji
Tii
Tj
Tj
Tji
Tj
Tj
dsddIWW
ddWsWW
dWW
µµ
µ
µε
22
2
2
1
1
1
+−=
−+=
+=
+
+
+
(1.20)
applicando ora l’operatore di media alla 1.20 otteniamo
[ ] ( )[ ]Tji
Tii
Tj
Tj dsddIWEWE µµ 221 +−=+ (1.21)
se il valore di µ è piccolo, il filtro ha una variabilità molto lenta cioè i coefficienti
del filtro variano molto lentamente e quindi il filtro è calcolato sulla base di una media fatta sui campioni.
Perciò se µ è piccolo la 1.21 può essere riscritta applicando l’operatore di media solo ai dati:
[ ]( ) [ ]( ) TT
jTj
Tji
Tii
Tj
Tj
pRIWW
dsEddEIWW
µµ
µµ
22
22
1
1
+−=
+−=
+
+ (1.22)
la situazione di equilibrio viene raggiunta quando Wi+1 = W i dalla (1.20) si vede
allora che, in questo caso;
( )[ ] [ ] 0==− Tii
Tii
Tii dEddWsE ε (1.23)
la (1.22) significa che uscita del cancellatore e rumore sono incorrelati, come
appunto desideravamo. Se Wi+1 = W i dalla (1.22) otteniamo W=R-1p Occupiamoci ora della stabilità del filtro e della sua evoluzione nel tempo. Se le
strutture utilizzate per il filtraggio adattativo sono di tipo FIR, non abbiamo problemi di stabilità del filtro, in quanto la risposta all'impulso è comunque destinata ad annullarsi nel tempo. E’ invece difficile verificare la stabilità di un filtro IIR tempo variante. Quindi in generale non converrà servirsi di strutture IIR per filtraggi adattativi.
Vediamo ora come evolve nel tempo il filtro adattativo; nella 1.22 si era visto che la matrice R rappresenta l’autocorrelazione della misura del rumore ambientale.
Iniziando allora con un generico vettore W0, affinché l'algoritmo
9

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
( )nTT
n RIWW µ20 −= (1.24) converga e rimanga stabile (per la stabilità ci interessa il termine forzante µR della
1.22), dovranno essere in modulo < 1 gli autovalori della matrice (I-2µR) Detti λi gli autovalori della matrice R, gli autovalori della matrice (I-2µR) saranno
(1-2µλi) ed affinché sia sempre
121 <− iµλ (1.25) dovremo porre
µλ >−1max (1.26)
dove λ è il massimo degli autovalori max λ i . Possiamo quindi scrivere
∑≤ iλλmax (1.27) in quanto gli autovalori di R, matrice simmetrica, sono positivi. La traccia della
matrice R è pari alla somma degli autovalori e potremo quindi scrivere
( ) ( )∑ ∑∑ ===≤2
max 0 ii xpRTrλλ (1.28) poiché allora
max2
111λλ
≤=∑∑ iix
(1.29)
se il fattore di convergenza µ sarà tale da soddisfare alla diseguaglianza
max2
11λ
µ ≤≤∑ ix
(1.30)
la stabilità è garantita. Come si vede per la stabilità dell’algoritmo è l’autovalore più alto che conta; per la
convergenza quello che conta è l’autovalore più basso poiché è quest’ultimo che dà la convergenza più lenta. Non vi deve allora essere una grande dispersione tra gli autovalori altrimenti il filtro continua a tendere al filtro ottimale senza mai raggiungerlo, in quanto gli autovalori più bassi rallentano l'evoluzione verso il filtro asintotico.
Oltre la cancellazione del rumore con un ingresso di riferimento è possibile anche la
cancellazione del rumore senza un ingresso di riferimento.
10

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Consideriamo infatti il caso in cui una interferenza periodica corrompa il segnale
ma in questa caso non sia disponibile un suo ingresso di riferimento. Se il segnale è a banda ampia così che la sua funzione di correlazione decada in maniera relativamente rapida possiamo generare un segnale di riferimento xj ponendo un ritardo tr sul segnale primario.
Il ritardo tr va scelto in modo tale che per l’autocorrelazione del segnale si abbia:
( ) ε<rtR (1.31) dove ε è un valore a piacere ritenuto sufficientemente piccolo. Il segnale ritardato
Figura 4: Cancellazione del rumore senza riferimento
Σ
Wj+1= Wj+2µεjsj
s1 w0
w1
wn
εj
++
+
-
ni
s
Σ+
s2
si=yi+ni
z-1
z-1
z-1
µ
s
s(j-tr) nell'ingresso di riferimento risulterà in tal caso sufficientemente incorrelato con l'ingresso primario mentre l'ingresso di riferimento n(j-tr) sarà correlato con il rumore presente nell’ingresso primario essendo quest’ultimo periodico. 1.5 FILTRO ADATTATIVO RICORSIVO
L’obiettivo della tecnica ARF è di adattare i coefficienti dei filtro, o pesi, in modo
da ottenere la risposta impulsiva del segnale desiderato. Consideriamo k=0….(j-1) campioni di un brano del segnale desiderato, ad esempio del complesso P-QRS-T e, quindi, il filtro trasversale richiederà J pesi. Il segnale di riferimento sarà dato da un impulso sincronizzato temporalmente con il primo campione del brano desiderato (ad esempio il complesso P-QRS-T). Ad ogni ricorrenza i=1,2, ... del complesso P-QRS-
11

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
T si ha un nuovo impulso di riferimento ed un nuovo aggiornamento di tutti i pesi dei filtro. La risposta all'impulso desiderata è ottenuta minimizzando l’MSE fra l’ingresso primario e quello di riferimento.
Per il filtro adattativi ricorsivo, il vettore di riferimento è Xk=[0 …1.... 0]T. Quindi wj+1=wj+2µεk (1.32)
Ad ogni passo viene adattato solo un peso del filtro, ma per ogni ciclo cardiaco vengono adattati tutti i pesi dei filtro.
Rilevazione del’impulso di riferimento Per realizzare l’ARF dobbiamo prima estrarre dal segnale un treno di impulsi
sincronizzato con i complessi QRS. L'impulso di riferimento è posizionato in modo tale che i pesi del filtro coprano l'intero complesso ORS-T; ciò può essere ottenuto piazzando l’impulso all'inizio di ogni complesso QRS. Per un paziente portatore di pace-maker; la sequenza degli impulsi di riferimento si ottiene semplicemente rilevando lo spike dei pacemaker. Per ritmi non stimolati è necessario rilevare il complesso QRS.
1.6 FILTRO FIR E PESATURA DEL SEGNALE IN USCITA ( WF ) Il progetto di un filtro FIR viene di solito affrontato tramite appositi algoritmi che
generano i coefficienti, pari al numero di punti dell’ampiezza della finestra mobile di filtraggio scelta, mediante la tecnica della finestratura. Come noto, è pertanto possibile ottenere particolari prestazione della risposta in frequenza di tali filtri, come una maggiore attenuazione in banda oscura o una minore ampiezza della banda di transizione, mediante una opportuna scelta sia del tipo di finestra che del numero di punti della sua ampiezza.
In particolare, per ottimizzare ulteriormente le prestazioni di tale filtraggio, in considerazione del particolare tipo di segnale in questione è stato proposto il seguente algoritmo (Bankman 1990).
Nei casi in cui non siano applicabili le tecniche classiche di filtraggio adattativo, o perché il segnale si presenta troppo breve per consentire la convergenza di tali algoritmi o perché non è disponibile un canale di riferimento su cui sia presente solo il disturbo, è possibile una particolare tecnica di filtraggio nei segnali biologici a step cioè in quei segnali, come l’elettrocardiogramma o i movimenti saccadici (oculografia), nei quali l'informazione di interesse è contenuta non tanto nel livello del segnale quanto nella transizione del segnale tra due livelli distinti.
In varie applicazioni biomediche il segnale di interesse si presenta corrotto da un rumore additivo che appare generalmente come non stazionario ma che comunque esibisce solitamente le seguenti proprietà:
12

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
- La sovrapposizione tra lo spettro del segnale e quello del rumore è tale che la
potenza del rumore è concentrata alle alte frequenze e vi è un a frequenza al di sotto della quale la maggior parte della potenza del segnale è presente senza alcun rumore additivo.
- Lo spettro del rumore varia nel tempo, ma può comunque essere considerato sufficientemente stazionario ed a media nulla all’interno di una finestra mobile di circa 0.1 s.
Il problema critico nel filtraggio dei segnali relativi ai movimenti saccadici è quello
di ridurre l’entità del rumore senza alterare la reale durata e velocità della saccade. A tale scopo è stato evidenziato che se la frequenza di taglio del filtro passa basso è troppo bassa la riduzione del rumore è accompagnata da una indesiderabile distorsione della forma del segnale che porta ad una sovrastima della durata della saccade ed ad una sottostima della sua velocità di picco mentre se la frequenza di taglio del filtro passa-basso è troppo alta la riduzione del rumore può essere insufficiente e portare viceversa ad una sovrastima della velocità di picco ed ad una sottostima della durata della saccade valutate sul profilo di velocità.
Pertanto la scelta ottimale dell'ampiezza della banda passante del filtro passa-basso dipenderà per ogni saccade dal contenuto armonico del segnale e del rumore e quindi in generale cambierà per le differenti saccadi all'interno dello stesso tracciato.
La pesatura dei campioni in uscita dal filtro FIR secondo l'algoritmo di seguito proposto ( WF ) garantisce un compromesso ottimale nel senso della minimizzazione dell'errore quadratico medio tra la stima della potenza del rumore e la stima della potenza dell'errore introdotto dalla distorsione che il filtro opera sul segnale.
Quando il rumore presenta le caratteristiche esposte, se esso è disponibile in una sezione del tracciato in assenza del segnale, come tipicamente si può considerare nei segnali biologici a step nel tratto immediatamente precedente la transizione, è possibile applicare il seguente metodo.
Tale metodo è costituito da uno schema di correzione che adopera una conoscenza a priori della sola varianza del rumore e che può essere adoperato per correggere l'uscita di un qualsiasi filtro passa-basso.
Supponiamo il segnale da filtrare, d, come la somma del segnale vero s e di un rumore a media nulla n, incorrelato con s.
n + s =d L’uscita del WF, z, è la media pesata dell’uscita del filtro FIR, y, e del segnale di
ingresso d. I coefficienti di d ed y sono l’uno il complemento dell’altro all’unità per conservare la medesima ampiezza del segnale.
( ) d c +y c - 1 ⋅⋅=z Il coefficiente di correzione c è determinato minimizzando il valore atteso di ε’ che
è la differenza tra l’uscita finale z ed il segnale vero, s=d-n.
13

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura 6: Filtro FIR a pesatura del segnale di uscita
Pertanto si ha
( )[ ] ( ) ( )[ ]( ) ( ) ( )( snyncccnsysyc
snsycsdcycsz
⋅−⋅−⋅⋅+⋅+⋅⋅−+−=
⋅+−⋅−=−⋅+⋅−=
)
−=
1221'
11''
222222ε
εε
Dalla prima delle proprietà citate per il rumore si ha che se la frequenza di taglio del filtro passa basso è scelta in modo tale che la banda passante copra solo quelle basse frequenze in cui il rumore è assente si ha che l’uscita y si può ritenere incorrelata ad n per cui
[ ] [ ][ ] ( ) [ ] [ ] [ ]{ } [ ]222222' 21'
0
nEcysEsEyEcE
nsEnyE
⋅+−+⋅−==
==
ξε
poiché
[ ] [ ] [ ][ ] ( )[ ] [ydEndyEysE
nEsEdE=−⋅=
+= 222
]
sommando e sottraendo ( ) [ ]221 nEc ⋅− si ha ( ) [ ] ( ) [ ]222 211' nEcEc ⋅−−⋅−= εξ
minimizzando ξ '' si ha
( ) [ ] [ ][ ] [ ]
[ ] ε
ε
εε
εξ
ppp
EnEEc
nEEcc
n−=
−=
=⋅+⋅−−=∂∂
2
22
22 0212'
La pε può essere stimata in ogni punto sommando il quadrato dei campioni di e all’interno di una finestra mobile, il WF richiede una conoscenza a priori della potenza del rumore che è facilmente misurabile in una sezione del tracciato immediatamente prima della transizione.
14

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Le seguenti considerazioni illustrano praticamente il processo di pesatura: 1) p pnε = , c=0 : è il caso in cui il filtro e completamente soddisfacente e non viene
richiesta alcuna correzione per cui l'uscita z è pari all'uscita del filtro FIR y. 2) p pnε > , 0<c<1 : è il caso in cui l'uscita del filtro FIR presenta solo un modesto
errore nel seguire l'andamento dell'ingresso e l'uscita del WF lo corregge con una opportuna pesatura mediante i campioni del segnale di ingresso
3) p pnε >> , c=1 : è il caso in cui l'errore introdotto dalla scarsa capacità dell'uscita del filtro FIR di seguire l'ingresso è molto più grande dell'errore introdotto dalla presenza del rumore pertanto il WF cancella l'uscita del filtro FIR e considera direttamente i campioni in ingresso al filtro
4) p pnε < , c<0 : è il caso in cui il coefficiente di correzione va riportato a zero. Per diminuire l'occorrenza di tale caso e far intervenire più massicciamente la pesatura va aumentata l'ampiezza della finestra mobile in cui è valutato pe oppure la frequenza di taglio del filtro.
La dipendenza dell'errore quadratico medio rispetto alla potenza dell'errore pe presenta il seguente andamento iperbolico.
nppp /11'
εε
ξ−=
Figura 7: Dipendenza dell’errore quadratico medio rispetto alla potenza dell’errore.
La risposta in frequenza del filtro viene quindi variata durante il processo di
filtraggio tra quella di un passa-tutto per c=1 a quella del passa-basso scelto per c=0. E’ stato osservato che la potenza del rumore diviene trascurabile al di sotto dei 30
Hz per cui le saccadi filtrate con una tale frequenza di taglio possono considerarsi prive di rumore
Per descrivere praticamente il funzionamento di tale algoritmo si può osservare che
quello che tipicamente accade è che in prossimità del fronte della saccade la distorsione causata dal filtro FIR genera uno spike s nel segnale di errore, il fattore di
15

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
correzione c pertanto cresce in corrispondenza di tale spike e ritorna a zero quando questo non cade più all’interno della finestra mobile.
Figura 8: Andamento della risposta in frequenza del filtro in funzione del coefficiente c.
Ciò in particolare si traduce quindi in una minore invasività sul segnale specie sul
fronte iniziale e finale della saccade anche se a tale scopo non è comunque desiderabile una eccessiva ampiezza della finestra mobile (fig. 9).
L’ampiezza di tale finestra mobile richiede infatti particolare attenzione, per ottenere un tratto stazionario del segnale di ingresso l'ampiezza di tale finestra deve essere uguale o inferiore alla durata per la quale il rumore stesso può essere ritenuto stazionario.
Per far ciò potremo pensare ad un algoritmo che iterativamente per valori crescenti dell'ampiezza della finestra calcoli la varianza delle potenze misurate allo scorrere di tale finestra sul segnale; tali varianze decresceranno al crescere dell'ampiezza della finestra e, fissando un valore di soglia per tale varianza al di sotto della quale la statistica possa essere ritenuta sufficientemente stazionaria, determinare l'estremo superiore per la scelta della ampiezza della finestra.
Inoltre poiché deve essere stimata una potenza una finestra che contenga un numero troppo esiguo di campioni può risultare una scelta inadeguata. Pertanto, tenuto conto delle diverse esigenze esposte la scelta dell'ampiezza della finestra dovrà essere operata tra tali due estremi.
16

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura 9: andamento della potenza di errore, del coefficiente di correzione, segnale non filtrato, segnale filtrato
Ovviamente per il tipo di rumore e di segnale che abbiamo considerato è
impossibile eliminare completamente il rumore nella banda in cui questo si sovrappone al segnale. Il contributo principale che si ottiene con il WF è che si ricava una uscita dove la massima potenza della distorsione introdotta dal filtro FIR non può essere maggiore della potenza del rumore.
17

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Se la potenza di tale distorsione è maggiore della potenza del rumore il guadagno
del filtro alle alte frequenze viene aumentato ad un livello che compensi tale distorsione.
Un tale approccio di minimizzazione dell'errore usando la conoscenza a priori della sola varianza del rumore può essere esteso anche ad uno schema di correzione più generale che adoperi un vettore di correzione piuttosto che un unico coefficiente. Ciò sarebbe equivalente ad agire variando i diversi coefficienti del filtro FIR realizzando così un più complesso tipo di filtro adattativo.
1.6 FILTRAGGIO NOTCH ADATTATIVO A STIMA INCREMENTALE A 50 HZ Il rumore più fastidioso in definitiva è costituito dal rumore di rete che si presenta
come un’oscillazione pseudo-sinusoidale, in generale modulata in ampiezza alla frequenza fondamentale di 50 Hz, sovrapposta al segnale. Ovviamente è opportuno ridurre il più possibile questo disturbo fin dall’origine evitando la vicinanza di sorgenti di interferenza, curando adeguatamente la messa in opera del sistema di misura e ricorrendo ad idonee schermature. Qualora, nonostante ciò, un rumore di questo tipo fosse ancora presente, non lo si può eliminare per semplice filtraggio passa-basso, se la frequenza di 50 Hz cade all’interno della banda del segnale perchè la sua eliminazione comporterebbe la perdita di una porzione importante dello spettro del segnale. Risulta utile in questi casi, il ricorso a filtri notch, ovvero filtri elimina banda a banda stretta centrati intorno alla frequenza di 50 Hz.
Una interessante applicazione del filtro notch può essere ottenuta via software in tempo differito. Si tratta di un filtro adattativo che ha cioè bisogno di conoscere un tratto del tracciato per imparare a caratterizzare il rumore. Questo tipo di filtro può essere utilizzato anche insieme a filtri passa basso più ampi cioè includenti la frequenza di rete migliorando così notevolmente i tracciati ottenuti.
Tale metodo sperimentato per la riduzione dell'interferenza di rete dall’elettrocardiogramma ( Levkov 1984 ) può essere utilmente applicato anche per i movimenti saccadici i quali presentano in comune la caratteristica di avere un tratto lineare sul quale si desidera eliminare il più possibile l'effetto dell'interferenza di rete ed un tratto in cui, similmente al complesso QRS dell'elettrocardiogramma, il segnale risulta localmente non lineare all'inizio ed al termine del movimento saccadico e si desidera invece preservarne il più possibile la morfologia per non falsare l’analisi della durata e della velocità di picco del segnale.
Il metodo richiede che la frequenza di campionamento sia un multiplo dell’interferenza di rete e fa uso del fatto che la somma di campioni del segnale di interferenza ugualmente spaziati in un periodo T=1/f è nulla.
Un segmento del segnale viene definito lineare se la differenza tra due campioni adiacenti rimane costante; in un tale segmento il valore reale di un campione può
18

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
essere determinato dalla semplice media dei campioni circostanti contenuti in un periodo T. Una volta che il valore vero è stato determinato anche il valore dell’interferenza può quindi essere facilmente determinato per sottrazione.
In un tratto non lineare del segnale invece i valori veri possono essere stimati per sottrazione dei valori dell’interferenza del tratto lineare più vicino.
Se il segnale è campionato, come nel nostro caso a 200 Hz, in un periodo T dell’interferenza a 50 Hz (20 ms) avremo quattro campioni del nostro segnale ciascuno costituito dalla somma del valore vero e dell’interferenza. La loro somma in un periodo T si può anche scrivere come la somma dei quattro valori veri più la somma dei quattro valori dell’interferenza dove, per quanto detto, la somma del secondo termine sarà nulla
( ) ( ) dYYYYYYYYYYYYYYYYY 2ˆ4ˆˆˆˆˆˆˆˆ
13210'
3'
2'
1'
032103210 +=+++=+++++++=+++ dove , d sono rispettivamente il valore vero, l'interferenza, e la differenza di due
valori veri consecutivi.
',ˆ YY
E' evidente che in questo caso il valore vero non può essere determinato dalla semplice media a causa del termine 2d.
La maniera più semplice per compensare tale addendo nell’equazione è di usare il termine (Y4-Y0)/2 poiché questo presenta la stessa ampiezza dell’interferenza essendo esattamente traslato di T:
( ) ( ) dYYYYYYYY 2
2
ˆˆ
2
ˆˆ
204
'00
'4404 =
−=
+−+=
−
per cui
( ) ( )[ ] 42ˆ0432101 YYYYYYY −−+++=
Per stimare la presenza dei tratti non lineari si può adoperare il criterio di verificare
quando la differenza in modulo tra le differenze parziali superi una determinata soglia M.
MDD >− 21 dove
e 15241 +++ −=−= iiii YYDYYD Quando tale condizione è verificata lungo i tratti ritenuti lineari il valore vero è
calcolato come la media su un periodo T e vengono stimate anche le ampiezze delle interferenze.
33'
322'
211'
100'
0ˆ ;ˆ ;ˆ ;ˆ YYYYYYYYYYYY −=−=−=−=
19

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
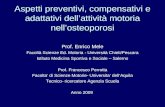
Figura 10: Diagramma di flusso dell’algoritmo per il filtro notch adattativo a stima incrementale
Quando ciò non accade, ovvero siamo in un tratto non lineare, i successivi quattro
campioni vengono corretti dalla stima dell'ampiezza dell'interferenza presente nel tratto precedentemente lineare, ciò rende l'algoritmo particolarmente sensibile nell’evitare la distorsione del segnale all'inizio ed al termine del movimento saccadico.
20

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura 11: Stima della linearità
L’algoritmo richiede pertanto la ricerca al primo ciclo di un tratto sicuramente
lineare per inizializzare la stima dell’ampiezza dell’interferenza, e quindi richiede che almeno le prime quattro differenze parziali siano inferiori alla soglia scelta (fig. 21).
L'efficienza dell'algoritmo è stata provata ripetutamente testandolo mediante delle saccadi ottenute da tracciati reali corretti manualmente assegnando un valore esattamente costante ai tratti di fissazione e preservando il solo movimento saccadico, ricavando così dei movimenti saccadici che possiamo sufficientemente ritenere privi di rumore ai quali è stata sovrapposta una interferenza sinusoidale anche modulata in ampiezza con i risultati mostrati in figura.
1.7 CANCELLAZIONE DEL RUMORE DALL’ECG AMBULATORIALE
Struttura fondamentale di un filtraggio adattativo La figura 12a mostra un filtro il cui ingresso primario è il segnale ECG S1 più un
rumore additivo N1, mentre l’ingresso di riferimento è il rumore N2 correlato, in qualche modo, con n1. L'uscita del filtro è y e l’0errore del filtro è ε=(S1 +N1 )-y, quindi
( ) ( ) ( ) 11121
21
211
211
2 222 ysnssynynsyns −++−=++−+=ε (1.33) Poiché segnale e rumore sono incorrelati, l’errore quadratico medio (MSE) è
[ ] ( )[ ] [ ]21
21
2 sEynEE +−=ε (1.34)
21

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Minimizzando l’MSE risulta in uscita al filtro un errore che è la migliore stima
quadratica dei segnale S1. Il filtro adattativo estrae il segnale, o elimina il rumore, minimizzando iterativamente l’MSE tra l’ingresso primario e quello di riferimento.
La figura 12b illustra un'altra situazione dove l'ECG è registrato da più derivazioni.
L'ingresso primario s1+ni è un segnale proveniente da una delle derivazioni. Il segnale di riferimento s2 è ottenuto da una seconda derivazione che è esente da rumore. Il segnale si può essere estratto minimizzando l’MSE fra l'ingresso primario e quello di riferimento. Usando una procedura simile alla (1) si può dimostrare che
[ ] ( )[ ] [ ]21
21
2 nEynEE +−=ε (1.3) Minimizzando l'MSE risulta che l'uscita del filtro y è la migliore ultima stima
quadratica del segnale s1. Cancellazione del rumore dall’ECG. Il rumore nelle registrazioni ambulatoriali è dovuto sia a fonti biologiche che
ambientali. Esempi di rumore ambientale sono la 50 (o 60) Hz e le sue armoniche generate dalla rete elettrica, il rumore a radio frequenza ed elettrochirurgico, ed il rumore della strumentazione. Esempi di interferenze biologiche sono: lo spostamento e l'oscillazione della linea di base, l’elettromiogramma (EMG), e gli artefatti da movimento. Lo scopo di questa sezione è di presentare un approccio per la cancellazione di questi diversi contributi di rumore dall'ECG ambulatoriale. La tabella riassume tutti i progetti e le applicazioni considerate in questa sezione. La tabella fa riferimento a gli schemi di filtri adattativi precedentemente introdotti e riportati in figura.
Tabella I Sommario del progetto di filtri adattativi per ECG
Tipo di rumore
Tipo di filtro
Ingresso Primario
Ingresso di riferimento
Risultato a Esempio
Oscillazioni della linea di base
1(a) ECG + noise Costante ε
50 Hz 1(a) ECG + noise Common-mode signal
ε
EMG 1(b) Avf AVr-aVl y Motion artifact 1(a) ECG + noise Impulse
sequence y
22

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
A. Riduzione dell'oscillazione della linea di base Van Aiste e Schilder descrivono un’efficiente filtro notch a risposta impulsiva finita
(FIR) che è piuttosto efficace nella rimozione dell'oscillazione della linea di base e dell'interferenza di rete. Il filtro adattativo per la rimozione dell’oscillazione della linea di base è un caso particolare di filtraggio notch, con frequenza notch nulla ( o continua). E' necessario un solo peso, e l’ingresso di riferimento è una costante di valore 1 (tabella 1). Questo filtro ha uno zero alla frequenza zero e, conseguentemente, crea un notch con larghezza di banda di ∆fs dove fs è la frequenza di campionamento. Le frequenze nell'intervallo 0-0.5 Hz saranno rimosse riducendo lo spostamento della linea di base. Se la frequenza di campionamento è di 500 campioni/sec., il parametro di convergenza pi dovrebbe essere minore di 0.003. La figura 12 mostra il risultato che si ottiene con un cancellatore adattativo della linea di base. Il parametro pt può essere corretto dinamicamente per ottenere la risposta a bassa frequenza desiderata. Notiamo che questo filtro produrrà alcune distorsioni nel segmento ST a causa dell’attenuazione delle componenti in bassa frequenza dell'ECG. Poiché il valore selezionato di p è piccolo, questo filtro converge lentamente quindi non può seguire gli improvvisi transienti prodotti dagli artefatti da movimento.
Figura 12: Esempio della riduzione delle oscillazioni della linea di base.
B. Cancellatore adattivo della 50 (o 60) Hz Fumo e Thompkins e Sahakian e Fumo descrivono progetti di filtro che sottraggano
una sinusoide a 50 (o 60) Hz dall’ECG. Widrow et al. descrivono un filtro che impiega i pesi in modo che possano essere cancellate le componenti sfasate ed in fase della 50 (o 60) Hz. In generale, tuttavia, il rumore di rete non è una sinusoide pura a 50 (o 60) Hz, ma è distorta. Quindi, suggeriamo di usare il vero segnale d'interferenza come riferimento. il segnale di modo comune usualmente registrato dall’elettrodo di riferimento sulla gamba destra è realmente correlato con il rumore registrato nell’ECG. L'ingresso primario dei filtro è il segnale ECG da filtrare e l'ingresso di riferimento è il segnale di modo comune (tabella 1). La figura 13 mostra un esempio di cancellazione della 60 Hz.
23

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura 13: esempio di cancellazione della 50Hz
C. Cancellatore multicanale del rumore EMG. Il rumore EMG presenta una larga banda che qualche volta si sovrappone a quella
dell'ECG. Un semplice filtraggio passa basso, quindi, non è adeguato. La nostra idea è, di impiegare più di una derivazione ECG. Poiché gli elettrodi sono usualmente posizionati in punti differenti, il rumore EMG proveniente dalle varie derivazione sarà incorrelato. Per assicurare ingressi incorrelati fra di loro, selezioniamo due derivazioni ECG ortonormali..
Il sistema di derivazioni ECG standard impiega tre derivazioni principali D1, D2, D3 e tre derivazioni aumentate aVR, aVL ed aVF. Dall’analisi del vettore cardiaco, notiamo che il vettore aVR-aVL è ortogonale ad aVF. Un rumore in una derivazione normale ci aspettiamo che sia incorrelato. L’ingresso primario del filtro è il segnale ECG prelevato alla derivazione aVF, mentre il segnale di riferimento è il segnale aVr-aVl (tabella 1). La figura 14 mostra il risultato della cancellazione adattativa dell’EMG.
D. Cancellazione dell’artefatto da movimento L'artefatto da movimento è usualmente la forma di rumore più difficile da eliminare
dal segnale ECG ambulatoriale Questo perché il suo spettro è completamente sovrapposto a quello dell'ECG, e la sua morfologia spesso ricorda quella delle onde P, QRS e T. Molti approcci di filtraggio lineare falliscono nella risoluzione di tale problema.
24

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura 14: filtraggio dell’EMG; a) ingresso primario, b)ingresso di riferimento derivato da aVr-Avl, c) segnale di errore, d) uscita del filtro
Un filtro adattativo ricorsivo è utile nella cancellazione di rumori che presentano
una morfologia ripetitiva. L'ingresso primario al filtro è il segnale ECG corrotto da un artefatto da movimento, e l'ingresso di riferimento è un impulso coincidente con., l'inizio di ogni complesso P-QRS-T (tabella 1). L’adattamento è eseguito solo per i campioni appartenenti al complesso, sottraendo questi complessi dall'ECG si ottiene come residuo l'artefatto da movimento (fig.15).
Figura 15: cancellazione dell’artefatto da movimento
Notiamo che poiché il filtro non adatta fra i complessi QRS, la linea di base fra
questi viene semplicemente interpolata. Questo, chiaramente, provoca alcune distorsioni del segnale. L'ECG risultante non è utilizzabile per visualizzazioni di
25

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
qualità diagnostica ma i complessi QRS esenti da rumore all'uscita del filtro, possono essere usati in applicazioni quali: la misura della variabilità cardiaca e la deviazione delle aritmie.
E. Filtro multicanale a due stadi Nell’ECG ambulatoriale tutte le forme di rumore possono intervenire
simultaneamente. La figura 16 illustra una combinazione di strutture di filtri. L’ingresso primario è il segnale ECG registrato da un soggetto in movimento. Il rumore include la 60 Hz, l'oscillazione della linea di base, il rumore EMG, e gli artefatto da movimento.
Figura 16: filtro adattativo a due stadi; W1 filtro per la rimozione delle oscillazioni della linea di base; W2 filtro per la cancellazione della 60 Hz; W3 filtro per la cancellazione dell’EMG e degli artefatti da movimento.
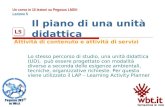
Il primo stadio del filtro separa l'oscillazione della linea di base yi dal rumore a 60
Hz Y2 [figura 17]. Il secondo stadio è un filtro ricorsivo (sezione C) per rimuovere il rumore EMG e l’artefatto da movimento. E’ necessario un filtro a due stadi: se non rimuoviamo precedentemente l’oscillazione della linea di base ed il rumore a 60 Hz, c’è la possibilità di rilevare falsi complessi ORS, e questo causerebbe una sequenza d’impulsi errata per il filtro ricorsivo. L'uscita dei secondo stadio y3 è il segnale desiderato privo di rumore.
26

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura 17: filtro adattativo a due stadi; d) segnale ECG da filtrare; y1) stima delle oscillazioni della linea di base; y2) stima dell’interferenza di rete; ε1) ECG senza interferenza di rete e oscillazioni della linea di base; ε2) EMG ed artefatti da movimento; y3 ECG filtrato.
1.8 RILEVAZIONE DELLE ARITMIE Il filtraggio adattativo può essere applicato all'analisi delle aritmie. Questa
applicazione è resa semplice da due fattori: 1) Il segnale ECG è usualmente caratterizzato da un ben definito complesso P-QRS-T, e 2) i complessi si ripetono ad ogni battito cardiaco. In condizioni normali, la morfologia resta costante ad ogni battito (sebbene vi siano delle variazioni minime). Ogni allontanamento significativo dalla morfologia indica la presenza di un'aritmia. In normali circostanze il complesso P-QRS-T rimane ben sincronizzato. Se questa normale sequenza viene interrotta, come nel caso di molte aritmie, il filtro adattativo riconosce le componenti incorrelate nella sequenza.
A. Cancellazione adattativa del complesso QRS Esaminiamo la capacità dell’ARF nell’acquisire la risposta impulsiva del complesso
QRS. La figura 8 illustra la forma d'onda di un ECG normale, gli impulsi coincidenti si ottengono dopo la deviazione dei QRS, ed un graduale adattamento del filtro trasversale. il risultato è un eccellente cancellazione del complesso QRS, che lascia la sequenza delle onde P come errore del filtro. Se si sceglie il parametro di convergenza µ abbastanza grande, l’ARF si aggiusta ad ogni battito, per piccole variazioni nella morfologia del ORS. Il tracciato contenente le sole onde P possono essere adeguatamente usate da un algoritmo di rivelazione delle aritmie atriali.
27

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura 18: a) segnale ECG con una sequenza di onde P-QRS-T ben definite, b) impulsi di riferimento coincidenti con l’inizio dei complessi QRS.
B. Rilevazione dei battiti ectopici I battiti ectopici sono ugualmente caratterizzati da una morfologia diversa da quella
dei normali complessi QRS. La figura 19 illustra un segnale ECG con alcuni battiti ectopici anormali che quindi presentano morfologie diverse. L’ARF adatta, inizialmente, la risposta impulsiva al normale complesso QRS, fornendo un filtro ad errore minimo. Un susseguente battito ectopico fornisce un disaggiustamento. L’errore dei filtro, o residuo, delinea chiaramente il battito ectopico. L’ARF acquisisce velocemente la risposta impulsiva dei complessi normali, e ne risulta un adattamento dell’errore minimo per il susseguente battito.
28

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura 19: rivelazione di battiti ectopici con l’ARF; a) segnale ECG, b) impulso incidente con il complesso QRS
C. Rilevazione dell'onda P in presenza di blocchi di conduzione Le onde P, a causa della loro piccola ampiezza, sono molto difficili da rilevare.
Nelle malattie di conduzione, le onde p sono dissociate dai complessi QRS, rendendo il problema della rivelazione ancora più difficile. Infatti, in caso di blocchi di secondo e terzo grado, le onde P possono, occasionalmente e casualmente, sovrapporsi ai complessi QRS. La figura 10 - mostra che l’ARF, come descritto precedentemente, effettua inizialmente la completa cancellazione dei complessi QRS-T. L'errore di adattamento ora visualizza preminentemente la sequenza delle onde P. Poiché la sequenza delle onde P è incorrelata con il complesso QRS-T, il filtro adattativo la considera come rumore e non vi si adatta (anche quando c'è una perfetta sovrapposizione fra onda P e complesso QRS). I risultati ottenuti non sono sempre perfetti. Può essere richiesta un ulteriore elaborazione dei segnale, specialmente quando sono presenti artefatti da movimento ed EMG.
29

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
Figura
D. Rilevazione della fibrillazione atriale. La fibrillazione atriale apparentemente non esibisce onde P, invece è visibile
un'onda fluttuante sulla linea di base. i complessi QRS non possono presentarsi ad intervalli regolari. Usando l’ARF, acquisiamo la risposta impulsiva del complesso QRS e cancelliamo adattativamente il complesso QRS dall'ECG. Il residuo include il segnale atriale. Slocum et al. suggeriscono di calcolare la funzione di auto-correlazione per estrarre il ritmo della forma d’onda atriale. La fig. 11 mostra l'auto-correlazione dei segnale ECG, il segnale ventricolare, e l'errore adattativo che include principalmente il segnale atriale. La fibrillazione atriale è così identificata dalle differenti funzioni di autocorrelazione dei ritmi atriali e ventricolari.
E. Ritmi stimolati (da pacemaker) Quando un paziente ha un pace-maker impiantato, l'ECG presenta un artefatto
dovuto allo spike del pacemaker. Esso dura solo pochi millisecondi ed è, quindi, prontamente rilevato. L'ARF è sincronizzato dallo spike dei pace-maker e la risposta impulsiva del ritmo stimolato viene acquista adattando i pesi del filtro (fig. 12). Occasionalmente il pace-maker fallisce l'inizializzazione dei ritmo (a causa di una cattiva conduzione o dell'alterazione della soglia di stimolazione del cuore). In questo
30

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
caso i complessi P-QRS-T del segnale stimolato e non stimolato presentano morfologie diverse. L'ARF, innescato da un battito non stimolato, registra un errore adattativo maggiore. Questa tecnica può essere usata per monitorare le prestazioni ed il cattivo funzionamento dei pace-maker.
Appendice 1: Posta g uno scalare funzione di un vettore di dimensioni M,1 e l’elemento del
vettore w scritto come dove è la parte reale e la parte immaginaria. In tal caso g può essere considerata come funzione di 2M variabili e . Se assumiamo che g è una funzione differenziabile rispetto a queste due variabili, allora è possibile definire la derivata di g rispetto al vettore w come il vettore di dimensioni m,1 dato dalla:
kw
kkk jbaw += ka kb
ka kb
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
+∂∂
∂∂
+∂∂
∂∂
+∂∂
=
MM
22
11
bgj
ag
bgj
ag
bgj
ag
ddg
M w
Consideriamo ora l’applicazione della formula a 3 esempi particolari:
Esempio 1 Dato lo scalare dove c e w sono vettore di dimensione M,1 scrivendo nella
forma espansa wHcg =
( )∑∑==
+==M
1kkk
*k
M
1kk
*k jbacwcg
da cui si ha: *k
k
cag=
∂∂ e *
kk
jcbg=
∂∂
e quindi ( ) 0w
w=Hc
dd
Esempio 2
Dato lo scalare dove c e w sono vettore di dimensione M,1 scrivendo nella forma espansa
cg Hw=
( )∑∑==
−==M
1kkkk
M
1k
*kk jbacwcg
da cui si ha
31

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
kk
cag
=∂∂ e k
k
jcbg
−=∂∂
e quindi ( ) c2c
dd H =ww
Esempio 3 Dato lo scalare dove w è vettore di dimensione M,1 e Q è una matrice
quadrata di dimensioni M,M. Se si pone o considerando cQwwHg =
wQH1c = Qw HHc =1 1
costante si ottiene: ( ) tetancos,c
dd H
1 == 1c 0ww
Se si pone considerando cQw=2c 2 costante si ottiene:
( ) tetancos,2cdd
22H == 2c cw
w
sommando i due contributi si ottiene ( ) QwQww
w2
dd H =
Appendice 2: Stabilità dell’algoritmo “steepest-descent“ Sostituendo la 1.9 nella 1.11 si ottiene:
( )[ ]nWW j1j Rwp −µ+=+ definiamo l’errore rispetto alla soluzione ottima
optjj WWc −= sostituendo e ricordando che il vettore p=Rw0 si ottiene
( ) j1j cc RI µ−=+ ricordando che
HQQR Λ= dove Q è la matrice degli autovettori(matrice unitaria della trasformazione), e laz
matrice Λ è la matrice diagonale degli autovalori. Sostituendo si ottiene ( ) j
H1j cc QQI Λµ−=+
premoltiplicando ambo i membri per QH e usando la proprietà delle matrici unitarie che QH = Q-1 (trasposta uguale ad inversa) si ottiene
( ) jH
1jH cc QIQ Λµ−=+
definendo ( ) [ ]optj
Hj
H WWcn −== QQv si può riscrivere l’equazione
( ) j1j vIv Λµ−=+ con il valore iniziale pari a
[ ]opt0H
0 WW −=Qv
32

Corso di Laurea Specialistica in Ingegneria Biomedica Elaborazione di Segnali Biomedici Filtri adattati ed adattativi per uso Biomedico
se si pone i valori iniziali del vettore W0 pari a zero si ottiene
optH
0 WQv −=
Per il singolo vk si può scrivere ( ) j,kk1j,k v1v µλ−=+
la soluzione dell’equazione omogenea del primo ordine è ( ) 0,k
nkn,k v1v µλ−=
che rappresenta una serie geometrica; per la convergenza di tale serie ( ) 111 k <µλ−<−
poiché tale relazione deve valere per tutti gli autovalori ed in particolare per l’autovalore più grande in valore assoluto si può scrivere
max20 λµ << se si pensa alla serie geometrica come ai campioni di un’esponenziale campionato si
può porre
⎟⎟⎠
⎞⎜⎜⎝
⎛τ
−=µλ−k
k1exp1
da cui si ottiene
( )kk 1ln
1µλ−
−=τ
da cui 11
kk <<µ
µλ≅τ
33